JP5150234B2 - 測量装置 - Google Patents
測量装置 Download PDFInfo
- Publication number
- JP5150234B2 JP5150234B2 JP2007323117A JP2007323117A JP5150234B2 JP 5150234 B2 JP5150234 B2 JP 5150234B2 JP 2007323117 A JP2007323117 A JP 2007323117A JP 2007323117 A JP2007323117 A JP 2007323117A JP 5150234 B2 JP5150234 B2 JP 5150234B2
- Authority
- JP
- Japan
- Prior art keywords
- target
- tracking
- solid
- image
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003384 imaging method Methods 0.000 claims description 95
- 230000003287 optical effect Effects 0.000 claims description 50
- 238000005259 measurement Methods 0.000 claims description 37
- 238000000034 method Methods 0.000 description 12
- 238000004364 calculation method Methods 0.000 description 8
- 230000005484 gravity Effects 0.000 description 6
- 230000004397 blinking Effects 0.000 description 5
- 238000001444 catalytic combustion detection Methods 0.000 description 4
- 230000007257 malfunction Effects 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 238000013500 data storage Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000000873 masking effect Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/002—Active optical surveying means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/66—Tracking systems using electromagnetic waves other than radio waves
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Telescopes (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Closed-Circuit Television Systems (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
Description
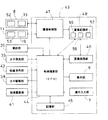
5 望遠鏡部
6 表示部
8 第1望遠鏡
11 第2望遠鏡
14 第2光軸
19 第2固体撮像素子
20 測距部
27 第2追尾用光源
29 第2追尾光
33 第1固体撮像素子
34 第1追尾用光源
36 ターゲット
37 第2撮像手段
40 第1撮像手段
43 制御装置
44 制御演算部
46 画像処理部
47 撮像制御部
48 画像記憶部
52 第1電子シャッタ
53 第2電子シャッタ
Claims (4)
- 鉛直方向及び水平方向の追尾機能を有する測量装置に於いて、第1追尾光学系及び第1固体撮像素子を具備する第1撮像手段と、第2追尾光学系及び第2固体撮像素子を具備する第2撮像手段と、前記第1撮像手段、第2撮像手段の撮像状態を制御する撮像制御装置と、前記第1固体撮像素子で得たターゲット像信号又は前記第2固体撮像素子で得たターゲット像信号に基づきターゲットの追尾を制御する制御部とを具備し、
前記第1追尾光学系は前記第2追尾光学系よりも大きい視野角を有し、前記第2撮像手段は前記第2追尾光学系を介して第2追尾光を射出し、前記第1撮像手段は前記第1追尾光学系を介して前記第2追尾光よりも大きい広がり角の第1追尾光を射出し、
前記第1撮像手段は前記第2撮像手段より広範囲の像を取得可能であり、前記撮像制御装置はターゲット像が前記第2固体撮像素子のターゲット受光範囲を外れた場合に前記第1撮像手段によりターゲット像を取得し、前記第1固体撮像素子が受光するターゲット像が所定範囲内の場合に前記第2撮像手段によりターゲット像を取得する様制御することを特徴とする測量装置。 - 前記制御部は、前記第1固体撮像素子で得たターゲット像信号に基づきターゲットの探索を行い、前記第2固体撮像素子で得たターゲット像信号に基づき測定の為の視準を行う請求項1の測量装置。
- 前記第2撮像手段の光軸を含む所要範囲を設定し、前記第2固体撮像素子によるターゲット受光位置が前記所要範囲に含まれる場合は、該所要範囲の受光信号を取得する様に前記第2固体撮像素子についてマスク処理をし、前記所要範囲の受光信号に基づき追尾を行う請求項1又は請求項2の測量装置。
- 前記ターゲット受光位置が前記所要範囲を外れた場合は、マスク処理を解除し、前記第2固体撮像素子からの受光信号に基づき追尾を行う請求項3の測量装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007323117A JP5150234B2 (ja) | 2007-12-14 | 2007-12-14 | 測量装置 |
| EP08170484A EP2071283A3 (en) | 2007-12-14 | 2008-12-02 | Surveying Instrument |
| US12/315,287 US8184267B2 (en) | 2007-12-14 | 2008-12-02 | Surveying instrument |
| CN2008101855092A CN101458081B (zh) | 2007-12-14 | 2008-12-12 | 测量装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007323117A JP5150234B2 (ja) | 2007-12-14 | 2007-12-14 | 測量装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009145207A JP2009145207A (ja) | 2009-07-02 |
| JP5150234B2 true JP5150234B2 (ja) | 2013-02-20 |
Family
ID=40548973
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007323117A Active JP5150234B2 (ja) | 2007-12-14 | 2007-12-14 | 測量装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8184267B2 (ja) |
| EP (1) | EP2071283A3 (ja) |
| JP (1) | JP5150234B2 (ja) |
| CN (1) | CN101458081B (ja) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2446300B1 (de) * | 2009-06-23 | 2016-10-12 | Leica Geosystems AG | Tracking-verfahren und messsystem mit lasertracker |
| US8772719B2 (en) | 2009-06-23 | 2014-07-08 | Leica Geosystems Ag | Coordinate measuring device |
| US8860809B2 (en) | 2010-02-11 | 2014-10-14 | Trimble Ab | Dual transmitter tracker |
| EP2381269A1 (de) * | 2010-04-13 | 2011-10-26 | Leica Geosystems AG | Koordinatenmessgerät mit automatischer Zielerfassung |
| US9772394B2 (en) | 2010-04-21 | 2017-09-26 | Faro Technologies, Inc. | Method and apparatus for following an operator and locking onto a retroreflector with a laser tracker |
| JP5698480B2 (ja) * | 2010-09-02 | 2015-04-08 | 株式会社トプコン | 測定方法及び測定装置 |
| GB2483439A (en) * | 2010-09-07 | 2012-03-14 | Witold Marian Gamski | Surveying tool for property maintenance and/or construction |
| US9482529B2 (en) | 2011-04-15 | 2016-11-01 | Faro Technologies, Inc. | Three-dimensional coordinate scanner and method of operation |
| US9686532B2 (en) | 2011-04-15 | 2017-06-20 | Faro Technologies, Inc. | System and method of acquiring three-dimensional coordinates using multiple coordinate measurement devices |
| JP2014516409A (ja) | 2011-04-15 | 2014-07-10 | ファロ テクノロジーズ インコーポレーテッド | レーザトラッカの改良位置検出器 |
| US9222771B2 (en) | 2011-10-17 | 2015-12-29 | Kla-Tencor Corp. | Acquisition of information for a construction site |
| EP2602641B1 (de) * | 2011-12-06 | 2014-02-26 | Leica Geosystems AG | Lasertracker mit positionssensitiven Detektoren zur Suche eines Ziels |
| US9541382B2 (en) * | 2011-12-19 | 2017-01-10 | Kabushiki Kaisha Topcon | Rotation angle detecting apparatus and surveying instrument |
| JP6129475B2 (ja) * | 2012-02-29 | 2017-05-17 | 三菱重工業株式会社 | 監視装置及び監視方法 |
| JP6211261B2 (ja) * | 2012-11-27 | 2017-10-11 | 株式会社ニコン・トリンブル | 測距装置 |
| DE102012223929A1 (de) * | 2012-12-20 | 2014-06-26 | Hilti Aktiengesellschaft | Verfahren und Vorrichtung zum Bestimmen der zweidimensionalen Ortskoordinaten eines Zielobjektes |
| US9041914B2 (en) | 2013-03-15 | 2015-05-26 | Faro Technologies, Inc. | Three-dimensional coordinate scanner and method of operation |
| US20140267772A1 (en) * | 2013-03-15 | 2014-09-18 | Novatel Inc. | Robotic total station with image-based target re-acquisition |
| CN103245322B (zh) * | 2013-04-10 | 2015-11-11 | 南京航空航天大学 | 一种基于双目立体视觉的测距方法及系统 |
| EP2801841B1 (de) * | 2013-05-10 | 2018-07-04 | Leica Geosystems AG | Lasertracker mit einer Zielerfassungseinheit für eine Zielverfolgung und eine Orientierungserkennung |
| FR3011922B1 (fr) * | 2013-10-11 | 2016-01-01 | Thales Sa | Systeme optique pour detection de posture comprenant une source de lumiere a balayage et un coin de cube |
| JP2017072709A (ja) * | 2015-10-07 | 2017-04-13 | 株式会社トプコン | 結像光学部材及び測量機の光学系 |
| JP6732442B2 (ja) * | 2015-12-15 | 2020-07-29 | 株式会社トプコン | 光波距離測定装置 |
| JP6892734B2 (ja) * | 2015-12-15 | 2021-06-23 | 株式会社トプコン | 光波距離測定装置 |
| CN105716582B (zh) * | 2016-02-15 | 2018-08-28 | 中林信达(北京)科技信息有限责任公司 | 摄像机视场角的测量方法、装置以及摄像机视场角测量仪 |
| JP6867244B2 (ja) * | 2017-06-28 | 2021-04-28 | 株式会社トプコン | 測量機の通信管理システム |
| JP7148255B2 (ja) * | 2018-03-30 | 2022-10-05 | 株式会社トプコン | 電子レベル |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3857639A (en) * | 1973-12-21 | 1974-12-31 | New Hampshire Ball Bearings | Electronic target |
| JPS5853709A (ja) | 1981-09-25 | 1983-03-30 | Mitsubishi Electric Corp | 光学追尾装置 |
| SE500856C2 (sv) * | 1989-04-06 | 1994-09-19 | Geotronics Ab | Arrangemang att användas vid inmätnings- och/eller utsättningsarbete |
| JPH05306907A (ja) * | 1992-04-30 | 1993-11-19 | Suzuki Motor Corp | レンズ計測制御システム |
| US5361217A (en) * | 1992-05-07 | 1994-11-01 | Fuji Photo Optical Co., Ltd. | Position measuring/plotting apparatus |
| DE69327220T2 (de) * | 1992-10-09 | 2000-06-21 | Sony Corp., Tokio/Tokyo | Erzeugung und Aufzeichnung von Bildern |
| JP3621123B2 (ja) * | 1993-12-28 | 2005-02-16 | 株式会社トプコン | 測量機 |
| JPH07332978A (ja) | 1994-06-07 | 1995-12-22 | Nikon Corp | 電子式測量機の視準装置 |
| JP3741477B2 (ja) * | 1996-03-18 | 2006-02-01 | 株式会社トプコン | 測量システム |
| US5988862A (en) * | 1996-04-24 | 1999-11-23 | Cyra Technologies, Inc. | Integrated system for quickly and accurately imaging and modeling three dimensional objects |
| JP4059948B2 (ja) * | 1997-01-08 | 2008-03-12 | フジノン株式会社 | 位置計測作図装置の自動追尾装置 |
| US6057537A (en) * | 1997-09-29 | 2000-05-02 | Eastman Kodak Company | Optical scanner feedback system having a reflected cylinder lens |
| JP4320099B2 (ja) * | 1999-03-26 | 2009-08-26 | 株式会社トプコン | 測量装置 |
| JP4175736B2 (ja) * | 1999-05-13 | 2008-11-05 | フジノン株式会社 | 位置計測作図用自動追尾装置 |
| JP4175739B2 (ja) * | 1999-05-31 | 2008-11-05 | フジノン株式会社 | 位置計測作図用自動追尾装置 |
| JP4229350B2 (ja) | 1999-09-28 | 2009-02-25 | ケミカルグラウト株式会社 | 推進機の軌道修正装置 |
| JP3718411B2 (ja) * | 2000-05-30 | 2005-11-24 | ペンタックス株式会社 | Af測量機 |
| US6611664B2 (en) * | 2000-06-26 | 2003-08-26 | Kabushiki Kaisha Topcon | Stereo image photographing system |
| JP4593730B2 (ja) * | 2000-06-26 | 2010-12-08 | 株式会社トプコン | ステレオ画像の測定装置 |
| JP4298155B2 (ja) * | 2000-11-17 | 2009-07-15 | 本田技研工業株式会社 | 距離測定装置、及び距離測定方法 |
| JP4356050B2 (ja) * | 2000-12-28 | 2009-11-04 | 株式会社トプコン | 測量装置と電子的記憶媒体 |
| JP3626141B2 (ja) * | 2001-08-10 | 2005-03-02 | 株式会社ソキア | 撮像装置を備えた自動視準測量機 |
| JP2003149342A (ja) | 2001-11-09 | 2003-05-21 | Penta Ocean Constr Co Ltd | 衛星測位と光波測位方式を用いた移動体測位方法及び装置 |
| JP3816812B2 (ja) | 2002-02-14 | 2006-08-30 | 株式会社ソキア | トータルステーション |
| JP4004316B2 (ja) * | 2002-03-20 | 2007-11-07 | 株式会社トプコン | 測量装置及び測量装置を用いて画像データを取得する方法 |
| JP2003279352A (ja) | 2002-03-25 | 2003-10-02 | Sokkia Co Ltd | 自動視準測量機 |
| JP3937154B2 (ja) * | 2002-06-28 | 2007-06-27 | 株式会社トプコン | 位置検出装置 |
| JP4228131B2 (ja) | 2002-10-11 | 2009-02-25 | 株式会社トプコン | 位置測定装置 |
| JP4255682B2 (ja) * | 2002-11-22 | 2009-04-15 | 株式会社トプコン | 反射体自動追尾装置 |
| JP4568009B2 (ja) * | 2003-04-22 | 2010-10-27 | パナソニック株式会社 | カメラ連携による監視装置 |
| JP4522754B2 (ja) * | 2004-06-14 | 2010-08-11 | 株式会社トプコン | 測量機 |
| EP1971821B1 (de) * | 2006-01-13 | 2013-07-17 | Leica Geosystems AG | Koordinatenmessgerät |
| CN101821583B (zh) * | 2007-10-10 | 2013-08-14 | 特里伯耶拿有限公司 | 用于跟踪和测量目标的测量装置 |
-
2007
- 2007-12-14 JP JP2007323117A patent/JP5150234B2/ja active Active
-
2008
- 2008-12-02 US US12/315,287 patent/US8184267B2/en active Active
- 2008-12-02 EP EP08170484A patent/EP2071283A3/en not_active Withdrawn
- 2008-12-12 CN CN2008101855092A patent/CN101458081B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2071283A3 (en) | 2013-01-16 |
| JP2009145207A (ja) | 2009-07-02 |
| CN101458081A (zh) | 2009-06-17 |
| EP2071283A2 (en) | 2009-06-17 |
| US20090153667A1 (en) | 2009-06-18 |
| CN101458081B (zh) | 2012-08-01 |
| US8184267B2 (en) | 2012-05-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5150234B2 (ja) | 測量装置 | |
| JP5469894B2 (ja) | 測量装置及び自動追尾方法 | |
| EP0661519B1 (en) | Surveying instrument | |
| JP4228132B2 (ja) | 位置測定装置 | |
| US8681317B2 (en) | Tracking method and measuring system having a laser tracker | |
| US8164626B2 (en) | Monitoring camera device | |
| JP3953103B2 (ja) | 標的マークの位置を敏速に検出するための方法及び装置 | |
| EP3640678B1 (en) | Tracker, surveying apparatus and method for tracking a target | |
| EP1519146A1 (en) | Position detector | |
| JP2009156772A (ja) | 測量システム | |
| JP2003279351A (ja) | 測量装置及び測量装置を用いて画像データを取得する方法 | |
| US20120081509A1 (en) | Optical instrument system and method | |
| CN105318865B (zh) | 测量装置 | |
| FR2641871A1 (fr) | Systeme de determination de la position d'au moins une cible par triangulation | |
| EP2808661A1 (en) | Spectral image acquiring device and spectral image acquiring method | |
| CN105277181B (zh) | 测量装置 | |
| US20060187333A1 (en) | Still image pickup device | |
| US10895456B1 (en) | Three-dimensional survey apparatus, three-dimensional survey method, and three-dimensional survey program | |
| KR100758205B1 (ko) | 영상에 대한 좌표 인식이 가능한 교량점검 시스템 | |
| JP6101037B2 (ja) | 追尾式レーザー装置、及び測定装置 | |
| CN112556663B (zh) | 测量装置和测量装置系统 | |
| CN117630874A (zh) | 具有tof传感器的测量设备 | |
| CN117630876A (zh) | 具有tof传感器的测量设备 | |
| JP2024088392A (ja) | 撮像装置及びその制御方法、プログラム、記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101203 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120705 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120717 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120912 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121106 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121203 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5150234 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151207 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |