JP6322069B2 - 変位検出装置 - Google Patents
変位検出装置 Download PDFInfo
- Publication number
- JP6322069B2 JP6322069B2 JP2014136970A JP2014136970A JP6322069B2 JP 6322069 B2 JP6322069 B2 JP 6322069B2 JP 2014136970 A JP2014136970 A JP 2014136970A JP 2014136970 A JP2014136970 A JP 2014136970A JP 6322069 B2 JP6322069 B2 JP 6322069B2
- Authority
- JP
- Japan
- Prior art keywords
- light beam
- light
- measured
- diffraction grating
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000006073 displacement reaction Methods 0.000 title claims description 113
- 230000003287 optical effect Effects 0.000 claims description 83
- 238000001514 detection method Methods 0.000 claims description 74
- 238000005259 measurement Methods 0.000 claims description 28
- 230000008878 coupling Effects 0.000 claims description 20
- 238000010168 coupling process Methods 0.000 claims description 20
- 238000005859 coupling reaction Methods 0.000 claims description 20
- 230000004907 flux Effects 0.000 claims description 8
- 230000005540 biological transmission Effects 0.000 claims description 6
- 230000008859 change Effects 0.000 description 43
- 230000010287 polarization Effects 0.000 description 24
- 238000010586 diagram Methods 0.000 description 15
- 238000000034 method Methods 0.000 description 10
- 230000010355 oscillation Effects 0.000 description 8
- 238000012937 correction Methods 0.000 description 7
- 230000007613 environmental effect Effects 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 4
- 239000011521 glass Substances 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 239000002245 particle Substances 0.000 description 4
- 229910052709 silver Inorganic materials 0.000 description 4
- 239000004332 silver Substances 0.000 description 4
- 239000000758 substrate Substances 0.000 description 4
- 239000011651 chromium Substances 0.000 description 3
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 229910052804 chromium Inorganic materials 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000010408 film Substances 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- NCGICGYLBXGBGN-UHFFFAOYSA-N 3-morpholin-4-yl-1-oxa-3-azonia-2-azanidacyclopent-3-en-5-imine;hydrochloride Chemical compound Cl.[N-]1OC(=N)C=[N+]1N1CCOCC1 NCGICGYLBXGBGN-UHFFFAOYSA-N 0.000 description 1
- 206010037660 Pyrexia Diseases 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 201000009310 astigmatism Diseases 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 239000000839 emulsion Substances 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000004020 luminiscence type Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- GGCZERPQGJTIQP-UHFFFAOYSA-N sodium;9,10-dioxoanthracene-2-sulfonic acid Chemical compound [Na+].C1=CC=C2C(=O)C3=CC(S(=O)(=O)O)=CC=C3C(=O)C2=C1 GGCZERPQGJTIQP-UHFFFAOYSA-N 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 238000001771 vacuum deposition Methods 0.000 description 1
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02015—Interferometers characterised by the beam path configuration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/266—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light by interferometric means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/026—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness by measuring distance between sensor and object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02015—Interferometers characterised by the beam path configuration
- G01B9/02017—Interferometers characterised by the beam path configuration with multiple interactions between the target object and light beams, e.g. beam reflections occurring from different locations
- G01B9/02019—Interferometers characterised by the beam path configuration with multiple interactions between the target object and light beams, e.g. beam reflections occurring from different locations contacting different points on same face of object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02055—Reduction or prevention of errors; Testing; Calibration
- G01B9/02075—Reduction or prevention of errors; Testing; Calibration of particular errors
- G01B9/02078—Caused by ambiguity
- G01B9/02079—Quadrature detection, i.e. detecting relatively phase-shifted signals
- G01B9/02081—Quadrature detection, i.e. detecting relatively phase-shifted signals simultaneous quadrature detection, e.g. by spatial phase shifting
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2290/00—Aspects of interferometers not specifically covered by any group under G01B9/02
- G01B2290/70—Using polarization in the interferometer
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Optical Transform (AREA)
Description
1.第1の実施形態:光路長の変化をキャンセルする回折格子を配置した変位検出装置
1−1.構成
1−2.変位検出方法
2.第2の実施形態:光路長の変化及び光源の波長変化をキャンセルする回折格子を配置した変位検出装置
3.第3の実施形態:光路長の変化及び光源の波長変化をキャンセルする回折格子を配置した変位検出装置
3−1.構成
3−2.変位検出方法
4.変位検出装置の利用例
[1−1.構成]
図1は、本発明の第1の実施形態に係る変位検出装置の概略構成図である。本実施形態の変位検出装置1は、透過型の第1回折格子7を用いて、被測定部材5の高さ方向の変位を検出する装置である。ここで、高さ方向とは、被測定部材の被測定面5aが平面であるとした場合に、その被測定面5aに垂直な方向を指し、図1では、高さ方向をz方向として示す。図1に示すように、変位検出装置1は、光源2と、光束分割部4と、第1回折格子7と、反射部6と、受光部10と、第2回折格子9と、相対位置情報出力部11とを備える。
スレーザ、固体レーザ、発光ダイオード等を用いることができる。
[式1]
d1=nλ/(sin(π/2−θ1)+sin(π/2−θ2))
ここで、nは、正の次数である。
[式2]
π/2−θ+sin−1{λ/d1−sin(π/2−θ)}≒Const
[式3]
2{L(θ3)sinθ3}=D
[式4]
tan(θ3)=D/2a
[式5]
tanθ3={tan(π/2−θ)}/2
ここで、θは第1の光束L1の被測定面5aへの入射角、π/2−θは第1の光束L1の第1回折格子7への入射角、θ3は第1の光束L1の第2回折格子9への入射角である。すなわち、式2で示される条件を満たすように第2回折格子9が配置されたとき、被測定部材5のチルトによる光路長の変位をキャンセルすることができる。
[式6]
d1=λ/(2×sin(π/2−θ))
d2=λ/(2×sinθ3)
[式7]
θ0=π/2−θ−θ3
そして、この式7を式5に代入することで、以下の式8を得ることができる。
[式8]
θ0=π/2−θ−arctan[{tan(π/2−θ)}/2]
次に、図1,図6及び図7を参照して、本実施形態の変位検出装置1を用いた変位検出方法について説明する。
図9は、本発明の第2の実施形態に係る変位検出装置の概略構成図である。本実施形態の変位検出装置20は、第2の光束L2を第1回折格子7で回折させる点と、光源2の近傍に第3回折格子21が設けられる点で、第1の実施形態に係る変位検出装置1と異なる。図9において、図1に対応する部分には同一符号を付し、重複説明を省略する。
[式9]
θ4=π/2−θ−θ3
次に、本発明の第3の実施形態に係る変位検出装置について説明する。図10は、本実施形態の変位検出装置の概略構成図である。本実施形態の変位検出装置30は、第1の光束L1及び第2の光束L2を2回、第1回折格子7に入射させた後に、受光部10に入射させる点で第2の実施形態に係る変位検出装置20と異なる。図10において、図1及び図9に対応する部分には同一符号を付し、重複説明を省略する。
図10に示すように、本実施形態の変位検出装置30では、光束分割部4と被測定部材5との間には、第1の位相板31が配置されており、光束分割部4と反射部22との間には第2の位相板32が配置されている。第1の位相板31と第2の位相板32はそれぞれ1/4波長反等で構成されている。
次に、図10、図6及び図7を参照して、本実施形態の変位検出装置30を用いた変位検出方法について説明する。
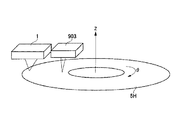
次に、上述した第1〜第3の実施形態に係る変位検出装置の利用例について図11及び図12を参照して説明する。図11は、第1の利用例について示す模式図である。図12は、第2の利用例について示す模式図である。なお、図11及び図12に示す利用例における被測定部材5は、例えば、回折格子スケールを用いたものである。
Claims (5)
- 光を出射する光源と、
前記光源から出射された光を、第1の光束及び第2の光束に分割する光束分割部と、
前記光束分割部に分割され、かつ、被測定部材の被測定面によって反射された第1の光束を回折し、回折した前記第1の光束を再び前記被測定部材の被測定面に入射させる透過型の第1回折格子と、
前記光束分割部に分割された第2の光束を反射させる反射部と、
前記第1回折格子で回折された後に前記被測定部材の被測定面に入射され、前記被測定部材の被測定面によって反射された前記第1の光束と、前記反射部で反射された前記第2の光束を結合する光束結合部と、
前記光束結合部によって前記第1の光束と前記第2の光束を結合することによって得られた干渉光を受光する受光部と、
前記第1の光束の、前記被測定部材と前記受光部との間の光路上に配置され、前記第1回折格子で回折された後に前記被測定部材の被測定面に入射され、前記被測定部材の被測定面によって反射された前記第1の光束を回折する透過型の第2回折格子であって、前記被測定部材のチルトによる前記第1の光束の光路長の変位をキャンセルするように配置された第2回折格子と、
前記受光部により受光した干渉光の強度に基づいて前記被測定部材の被測定面の高さ方向の変位情報を出力する相対位置情報出力部と
を備える変位検出装置。 - 前記第1の光束における前記光束分割部から前記第1回折格子を介して前記光束結合部までの光路長と、前記第2の光束における前記光束分割部から前記反射部を介して前記光束結合部までの光路長は略等しく設定されている
請求項1に記載の変位検出装置。 - 前記第1回折格子の格子ベクトルは、前記被測定部材の被測定面に対して略直角に配置される
請求項1又は2に記載の変位検出装置。 - 前記第1の光束の、前記第1回折格子及び前記第2回折格子への各々の入射角がブラッグ条件を満たし、かつ、前記光束分割部から出射された前記第1の光束が最初に前記被測定部材の被測定面に入射する際の入射角θと前記第1回折格子の格子ベクトルに対する前記第2回折格子の格子ベクトルの角度θ0とが、
θ0=π/2−θ−arctan[{tan(π/2−θ)}/2]
を満たす
請求項2に記載の変位検出装置。 - さらに、前記光源と、前記光束分割部との間の光路上に配置された第3回折格子を備える
請求項1〜4のいずれか一項に記載の変位検出装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014136970A JP6322069B2 (ja) | 2014-07-02 | 2014-07-02 | 変位検出装置 |
| EP15174963.7A EP2963392B1 (en) | 2014-07-02 | 2015-07-02 | Displacement detecting device |
| US14/790,835 US9303973B2 (en) | 2014-07-02 | 2015-07-02 | Displacement detection apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014136970A JP6322069B2 (ja) | 2014-07-02 | 2014-07-02 | 変位検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016014600A JP2016014600A (ja) | 2016-01-28 |
| JP6322069B2 true JP6322069B2 (ja) | 2018-05-09 |
Family
ID=53546119
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014136970A Active JP6322069B2 (ja) | 2014-07-02 | 2014-07-02 | 変位検出装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9303973B2 (ja) |
| EP (1) | EP2963392B1 (ja) |
| JP (1) | JP6322069B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6400035B2 (ja) * | 2016-03-14 | 2018-10-03 | キヤノン株式会社 | 位置検出装置、力覚センサ、および、装置 |
| CN105758435B (zh) * | 2016-04-14 | 2018-02-09 | 清华大学深圳研究生院 | 一种绝对式光栅尺 |
| US10077991B2 (en) * | 2016-09-27 | 2018-09-18 | Mitutoyo Corporation | Optical encoder configured to mitigate undesired interfering light components |
| JP6786442B2 (ja) * | 2017-05-23 | 2020-11-18 | Dmg森精機株式会社 | 変位検出装置 |
| RU2667335C1 (ru) * | 2017-11-29 | 2018-09-18 | Федеральное государственное бюджетное учреждение науки Институт автоматики и электрометрии Сибирского отделения Российской академии наук (ИАиЭ СО РАН) | Двухлучевой интерферометр (варианты) |
| JP7159017B2 (ja) * | 2018-11-22 | 2022-10-24 | Dmg森精機株式会社 | 変位検出装置 |
| TWI721719B (zh) * | 2019-12-19 | 2021-03-11 | 財團法人工業技術研究院 | 量測裝置 |
| CN112240748B (zh) * | 2020-11-17 | 2024-08-06 | 中国科学院上海微系统与信息技术研究所 | 一种带有非厄米耦合角度检测纠正装置的微位移机构 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3726595A (en) * | 1970-01-07 | 1973-04-10 | Canon Kk | Method for optical detection and/or measurement of movement of a diffraction grating |
| JPH01112416A (ja) * | 1987-10-27 | 1989-05-01 | Nec Corp | キーボード |
| JP2619566B2 (ja) * | 1990-11-20 | 1997-06-11 | オ−クマ株式会社 | 光学式位置検出器 |
| JP2973636B2 (ja) | 1991-09-26 | 1999-11-08 | ソニー・プレシジョン・テクノロジー株式会社 | 変位検出装置 |
| JPH0689480A (ja) | 1992-09-09 | 1994-03-29 | Ricoh Co Ltd | 光磁気記録再生装置 |
| JP3144143B2 (ja) * | 1993-04-13 | 2001-03-12 | ソニー・プレシジョン・テクノロジー株式会社 | 光学式変位測定装置 |
| JP3491969B2 (ja) * | 1994-06-27 | 2004-02-03 | キヤノン株式会社 | 変位情報測定装置 |
| WO2002046691A1 (en) * | 2000-12-08 | 2002-06-13 | Zygo Corporation | Monolithic corrector plate |
| ATE421716T1 (de) * | 2003-09-15 | 2009-02-15 | Zygo Corp | Oberflächen-triangulation und -profilierung |
| EP2553401B1 (en) | 2010-03-30 | 2015-09-02 | Zygo Corporation | Interferometric encoder systems |
| JP5905729B2 (ja) * | 2011-10-26 | 2016-04-20 | Dmg森精機株式会社 | 変位検出装置 |
| JP5918592B2 (ja) * | 2012-03-30 | 2016-05-18 | Dmg森精機株式会社 | 位置検出装置 |
| JP5699105B2 (ja) * | 2012-04-11 | 2015-04-08 | 株式会社日立製作所 | 表面計測方法とその装置 |
| DE102013203211A1 (de) * | 2012-06-15 | 2013-12-19 | Dr. Johannes Heidenhain Gmbh | Vorrichtung zur interferentiellen Abstandsmessung |
| JP5984554B2 (ja) * | 2012-07-25 | 2016-09-06 | Dmg森精機株式会社 | 変位検出装置 |
| CN102937411B (zh) * | 2012-11-09 | 2015-01-21 | 清华大学 | 一种双频光栅干涉仪位移测量系统 |
-
2014
- 2014-07-02 JP JP2014136970A patent/JP6322069B2/ja active Active
-
2015
- 2015-07-02 EP EP15174963.7A patent/EP2963392B1/en active Active
- 2015-07-02 US US14/790,835 patent/US9303973B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2963392A1 (en) | 2016-01-06 |
| US20160003605A1 (en) | 2016-01-07 |
| US9303973B2 (en) | 2016-04-05 |
| EP2963392B1 (en) | 2017-11-22 |
| JP2016014600A (ja) | 2016-01-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6322069B2 (ja) | 変位検出装置 | |
| JP5905729B2 (ja) | 変位検出装置 | |
| US8687202B2 (en) | Displacement detecting device | |
| JP5504068B2 (ja) | 変位検出装置 | |
| US20120050748A1 (en) | Displacement detecting device | |
| JP6427399B2 (ja) | 変位検出装置 | |
| JP6786442B2 (ja) | 変位検出装置 | |
| JP5936399B2 (ja) | 位置検出装置 | |
| JP5918592B2 (ja) | 位置検出装置 | |
| US10451401B2 (en) | Displacement detecting device with controlled heat generation | |
| JP6161870B2 (ja) | 位置検出装置 | |
| JP6251126B2 (ja) | 変位検出装置 | |
| JP7141313B2 (ja) | 変位検出装置 | |
| JP7159017B2 (ja) | 変位検出装置 | |
| JP7042183B2 (ja) | 変位検出装置 | |
| JP5984555B2 (ja) | 変位検出装置 | |
| JP5969274B2 (ja) | 位置検出装置 | |
| JP5984554B2 (ja) | 変位検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170223 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180308 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180403 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180406 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6322069 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |