CN101583910A - 旋转力传递部件 - Google Patents
旋转力传递部件 Download PDFInfo
- Publication number
- CN101583910A CN101583910A CNA2007800475121A CN200780047512A CN101583910A CN 101583910 A CN101583910 A CN 101583910A CN A2007800475121 A CNA2007800475121 A CN A2007800475121A CN 200780047512 A CN200780047512 A CN 200780047512A CN 101583910 A CN101583910 A CN 101583910A
- Authority
- CN
- China
- Prior art keywords
- connector
- revolving force
- driving shaft
- angle
- master component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



























































































Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/75—Details relating to xerographic drum, band or plate, e.g. replacing, testing
- G03G15/751—Details relating to xerographic drum, band or plate, e.g. replacing, testing relating to drum
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/02—Apparatus for electrographic processes using a charge pattern for laying down a uniform charge, e.g. for sensitising; Corona discharge devices
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/06—Apparatus for electrographic processes using a charge pattern for developing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/75—Details relating to xerographic drum, band or plate, e.g. replacing, testing
- G03G15/757—Drive mechanisms for photosensitive medium, e.g. gears
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G21/00—Arrangements not provided for by groups G03G13/00 - G03G19/00, e.g. cleaning, elimination of residual charge
- G03G21/16—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G21/00—Arrangements not provided for by groups G03G13/00 - G03G19/00, e.g. cleaning, elimination of residual charge
- G03G21/16—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements
- G03G21/1661—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements means for handling parts of the apparatus in the apparatus
- G03G21/1671—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements means for handling parts of the apparatus in the apparatus for the photosensitive element
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G21/00—Arrangements not provided for by groups G03G13/00 - G03G19/00, e.g. cleaning, elimination of residual charge
- G03G21/16—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements
- G03G21/18—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements using a processing cartridge, whereby the process cartridge comprises at least two image processing means in a single unit
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G21/00—Arrangements not provided for by groups G03G13/00 - G03G19/00, e.g. cleaning, elimination of residual charge
- G03G21/16—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements
- G03G21/18—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements using a processing cartridge, whereby the process cartridge comprises at least two image processing means in a single unit
- G03G21/1839—Means for handling the process cartridge in the apparatus body
- G03G21/1842—Means for handling the process cartridge in the apparatus body for guiding and mounting the process cartridge, positioning, alignment, locks
- G03G21/1853—Means for handling the process cartridge in the apparatus body for guiding and mounting the process cartridge, positioning, alignment, locks the process cartridge being mounted perpendicular to the axis of the photosensitive member
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G21/00—Arrangements not provided for by groups G03G13/00 - G03G19/00, e.g. cleaning, elimination of residual charge
- G03G21/16—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements
- G03G21/18—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements using a processing cartridge, whereby the process cartridge comprises at least two image processing means in a single unit
- G03G21/1839—Means for handling the process cartridge in the apparatus body
- G03G21/1857—Means for handling the process cartridge in the apparatus body for transmitting mechanical drive power to the process cartridge, drive mechanisms, gears, couplings, braking mechanisms
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G21/00—Arrangements not provided for by groups G03G13/00 - G03G19/00, e.g. cleaning, elimination of residual charge
- G03G21/16—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements
- G03G21/18—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements using a processing cartridge, whereby the process cartridge comprises at least two image processing means in a single unit
- G03G21/1839—Means for handling the process cartridge in the apparatus body
- G03G21/1857—Means for handling the process cartridge in the apparatus body for transmitting mechanical drive power to the process cartridge, drive mechanisms, gears, couplings, braking mechanisms
- G03G21/186—Axial couplings
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2221/00—Processes not provided for by group G03G2215/00, e.g. cleaning or residual charge elimination
- G03G2221/16—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements and complete machine concepts
- G03G2221/1651—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements and complete machine concepts for connecting the different parts
- G03G2221/1657—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements and complete machine concepts for connecting the different parts transmitting mechanical drive power
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Plasma & Fusion (AREA)
- Electrophotography Configuration And Component (AREA)
- Discharging, Photosensitive Material Shape In Electrophotography (AREA)
- Devices For Conveying Motion By Means Of Endless Flexible Members (AREA)
- Rolls And Other Rotary Bodies (AREA)
Abstract
一种用于成像设备的主组件的感光鼓的旋转力传递部件,其中,所述主组件包括驱动轴,所述驱动轴具有旋转力施加部,所述旋转力传递部件包括:联接件,其能够进入用于将用于旋转所述电子照相感光鼓的旋转力传递至所述电子照相感光鼓的旋转力传递角位置;并且所述联接件能够从所述旋转力传递角位置进入脱离角位置,在所述脱离角位置,所述联接件远离所述电子照相感光鼓的轴线倾斜,其中,当沿着与所述电子照相感光鼓的轴线大致垂直的方向从电子照相成像设备的主组件拆卸所述处理盒时,所述联接件从所述旋转力传递角位置移至所述脱离角位置。
Description
技术领域
本发明涉及用于电子照相处理盒的旋转力传递部件、处理盒能够以可拆卸方式安装于其上的电子照相成像设备、以及电子照相感光鼓单元。
背景技术
电子照相成像设备的例子包括电子照相复印机、电子照相打印机(激光束打印机、LED打印机等等)以及类似物。
通过将电子照相感光件以及作用在电子照相感光件上的处理装置整体地装配在一单元(盒)中而制备处理盒,并且处理盒能够安装至电子照相成像设备的主组件并从主组件上拆卸。例如,通过将电子照相感光件以及作为处理装置的显影装置、充电装置和清洁装置中的至少一个整体地装配到盒中而制备处理盒。因此,处理盒的例子包括以下处理盒:通过将电子照相感光件和由显影装置、充电装置和清洁装置组成的三个处理装置整体装配在盒中而制备的处理盒;通过将电子照相感光件以及作为处理装置的充电装置整体装配在盒中而制备的处理盒;以及通过整体装配电子照相感光件以及由充电装置和清洁装置组成的两个处理装置而制备的处理盒。
使用者自己能够将所述处理盒以可拆卸方式安装至设备主组件。因此,使用者自己可以进行设备的维护,而无需依赖服务人员。因此,改进了电子照相成像设备的维护的可操作性。
在传统的处理盒中,已知用于从设备主组件接收旋转驱动力以便旋转鼓形电子照相感光件(下面称作“感光鼓”)的以下构造。
在主组件侧,设置一可旋转件和一非圆形扭转孔,所述可旋转件用于传递电机的驱动力,所述扭转孔设置在可旋转件的中心部,设有多个角部且具有可以与所述可旋转件一体转动的横截面。
在处理盒侧,设置一非圆形扭转突起,所述突起设置在感光鼓的其中一个纵向端部并且具有设有多个角部的横截面。
在处理盒被安装至设备主组件的情况下,当可旋转件在所述突起和所述孔彼此接合的状态下旋转时,在突起上被施加朝着孔的吸引力的状态下,可旋转件的旋转力被传递至感光鼓。结果,用于旋转感光鼓的旋转力从设备主组件传递至感光鼓(美国专利No.5,903,803)。
另外,已知一种方法,在所述方法中,通过啮合固定至感光鼓的齿轮而旋转感光鼓,所述感光鼓构成处理盒(美国专利No.4,829,335)。
然而,在美国专利No.5,903,803中所描述的传统构造中,当通过沿着与可旋转件的轴线大致垂直的方向移动处理盒而将处理盒安装至主组件或者从主组件拆除时,需要使可旋转件沿着水平方向移动。也就是说,需要通过设置于设备主组件的主组件盖的打开和关闭操作而使可旋转件水平移动。通过所述主组件盖的打开操作,所述孔与所述突起分离。另一方面,通过主组件盖的关闭操作,所述孔朝着所述突起移动以便与突起接合。
因此,在传统的处理盒中,需要在主组件上设置一种构造,其用于通过主组件盖的打开和关闭操作而沿着旋转轴线方向移动可旋转件。
在美国专利No.4,829,335所描述的构造中,无需沿着其轴线方向移动设置于主组件的驱动齿轮,所述盒就能够通过沿着大致垂直于所述轴线的方向移动而安装至主组件以及从主组件上拆卸。然而,在这种构造中,主组件和盒之间的驱动连接部是齿轮之间的啮合部,从而难以防止感光鼓的旋转不均匀性。
发明内容
本发明的主要目的是提供能够解决传统处理盒的上述问题的用于处理盒的旋转力传递部件、用于所述处理盒中的感光鼓单元以及所述处理盒能够以可拆卸方式安装至其上的电子照相成像设备。
本发明的另一个目的是提供一种用于处理盒的旋转力传递部件,所述处理盒能够通过被安装至主组件而平稳地旋转感光鼓,所述主组件并不设置这样的机构:所述机构用于通过主组件盖的打开和关闭操作而移动主组件侧联接件(沿着其轴线方向)以便将旋转力传递至感光鼓。本发明的另一个目的是提供一种用于处理盒中的感光鼓单元以及一种处理盒可以安装至其上并从其上拆除的电子照相成像设备。
本发明的再一个目的是提供一种用于处理盒的旋转力传递部件,所述处理盒可以沿着与电子照相成像设备的主组件所设有的驱动轴的轴线垂直的方向从电子照相成像设备的主组件上拆卸。本发明的再一个目的是提供用于处理盒中的感光鼓单元的旋转力传递部件以及处理盒能够以可拆卸方式安装至其上的电子照相成像设备。
本发明的又一个目的是提供一种用于处理盒的旋转力传递部件,所述处理盒可以沿着与电子照相成像设备的主组件所设有的驱动轴的轴线大致垂直的方向安装至电子照相成像设备的主组件。本发明的又一个目的是提供用于处理盒中的感光鼓单元的旋转力传递部件以及处理盒能够以可拆卸方式安装至其上的电子照相成像设备。
本发明的又一个目的是提供一种用于处理盒的旋转力传递部件,所述处理盒可以沿着与电子照相成像设备的主组件所设有的驱动轴的轴线大致垂直的方向安装至电子照相成像设备的主组件以及从主组件上拆卸。本发明的又一个目的是提供用于处理盒中的感光鼓单元的旋转力传递部件以及处理盒能够以可拆卸方式安装至其上的电子照相成像设备。
本发明的又一个目的是提供一种用于处理盒的旋转力传递部件,所述处理盒兼容地实现了处理盒沿着与主组件所设有的驱动轴的轴线大致垂直的方向从主组件上拆卸并且能够平稳地旋转感光鼓。本发明的又一个目的是提供用于处理盒中的感光鼓单元的旋转力传递部件以及处理盒能够以可拆卸方式安装至其上的电子照相成像设备。
本发明的又一个目的是提供一种用于处理盒的旋转力传递部件,所述处理盒兼容地实现了处理盒沿着与主组件所设有的驱动轴的轴线大致垂直的方向安装至主组件并且能够平稳地旋转感光鼓。本发明的又一个目的是提供用于处理盒中的感光鼓单元的旋转力传递部件以及处理盒能够以可拆卸方式安装至其上的电子照相成像设备。
本发明的又一个目的是提供一种用于处理盒的旋转力传递部件,所述处理盒兼容地实现了处理盒沿着与主组件所设有的驱动轴的轴线大致垂直的方向安装至主组件以及从主组件上拆卸并且能够平稳地旋转感光鼓。本发明的又一个目的是提供用于处理盒中的感光鼓单元的旋转力传递部件以及处理盒能够以可拆卸方式安装至其上的电子照相成像设备。
根据本发明,提供了一种用于处理盒的旋转力传递部件,所述处理盒能够沿着与电子照相成像设备的主组件所设有的驱动轴的轴线大致垂直的方向从电子照相成像设备的主组件上拆卸。
根据本发明,提供了一种用于可与处理盒一起使用的感光鼓单元的旋转力传递部件以及处理盒能够以可拆卸方式安装至其上的电子照相成像设备。
根据本发明,提供了一种用于处理盒的旋转力传递部件,所述处理盒可以沿着与电子照相成像设备的主组件所设有的驱动轴的轴线大致垂直的方向安装至主组件。
根据本发明,提供了一种用于可与处理盒一起使用的感光鼓单元的旋转力传递部件以及具有能够以可拆卸方式安装的处理盒的电子照相成像设备。
根据本发明,提供了一种用于处理盒的旋转力传递单元,所述处理盒可以沿着与电子照相成像设备的主组件所设有的驱动轴的轴线大致垂直的方向安装至主组件并从主组件上拆卸。
根据本发明,提供了一种用于可与处理盒一起使用的感光鼓单元的旋转力传递单元以及处理盒可以安装至其上并从其上拆卸的电子照相成像设备。
根据本发明,处理盒被安装至主组件并且能够平稳地旋转感光鼓,所述主组件并不设置这样的机构:所述机构用于相对轴向方向移动主组件侧鼓联接件以便将旋转力传递至感光鼓。
根据本发明,处理盒能够沿着与设置在主组件中的驱动轴的轴线大致垂直的方向被拆卸,同时能够进行感光鼓的平稳旋转。
根据本发明,处理盒能够沿着与设置在主组件中的驱动轴的轴线大致垂直的方向被安装,同时能够进行感光鼓的平稳旋转。
根据本发明,处理盒能够沿着与设置在主组件中的驱动轴的轴线大致垂直的方向被安装及拆卸,同时能够进行感光鼓的平稳旋转。
在结合附图考虑本发明的优选实施例的以下描述之后,本发明的这些和其它目的、特征和优点将变得显而易见。
附图说明
图1是根据本发明实施例的盒的剖视侧视图。
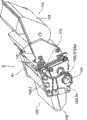
图2是根据本发明实施例的盒的透视图。
图3是根据本发明实施例的盒的透视图。
图4是根据本发明实施例的设备主组件的剖视侧视图。
图5是根据本发明实施例的鼓法兰(鼓轴)的透视图和纵向剖视图。
图6是根据本发明实施例的感光鼓的透视图。
图7是根据本发明实施例的感光鼓的纵向剖视图。
图8是根据本发明实施例的联接件的透视图和纵向剖视图。
图9是根据本发明实施例的鼓支承件的透视图。
图10是根据本发明实施例的盒的侧面的细节视图。
图11是根据本发明实施例的联接件和支承件的分解透视图和纵向剖视图。
图12是在装配根据本发明实施例的盒之后的纵向剖视图。
图13是在装配根据本发明实施例的盒之后的纵向剖视图。
图14是根据本发明实施例的盒的纵向剖视图。
图15是显示鼓轴和联接件的组合状态的透视图。
图16是显示联接件的倾斜状态的透视图。
图17是根据本发明实施例的设备主组件的驱动结构的透视图和纵向剖视图。
图18是根据本发明实施例的设备主组件的盒设置部的透视图。
图19是根据本发明实施例的设备主组件的盒设置部的透视图。
图20是显示了根据本发明实施例的将盒安装至设备主组件的过程的剖视图。
图21是显示了根据本发明实施例的驱动轴与联接件之间的接合过程的透视图。
图22是显示了根据本发明实施例的驱动轴与联接件之间的接合过程的透视图。
图23是显示了根据本发明实施例的设备主组件的联接件与盒的联接件的透视图。
图24是显示了根据本发明实施例的驱动轴、驱动齿轮、联接件以及鼓轴的透视图。
图25是显示了根据本发明实施例的联接件与驱动轴脱离的过程的透视图。
图26是显示了根据本发明实施例的联接件和鼓轴的透视图。
图27是显示了根据本发明实施例的鼓轴的透视图。
图28是显示了根据本发明实施例的驱动轴和驱动齿轮的透视图。
图29是显示了根据本发明实施例的联接件的透视图以及侧视图。
图30是显示了根据本发明实施例的鼓轴、驱动轴以及联接件的分解透视图。
图31显示了根据本发明实施例的盒的侧面的侧视图和纵向截面。
图32是根据本发明实施例的透视图以及从设备主组件的盒设置部的装置看时的视图。
图33是显示了根据本发明实施例的将盒从设备主组件上拆卸的过程的纵向剖视图。
图34是显示了根据本发明实施例的将盒安装至设备主组件的过程的纵向剖视图。
图35是显示了根据本发明第二实施例的用于驱动轴的相位控制部件的透视图。
图36是显示了根据本发明实施例的盒的安装操作的透视图。
图37是根据本发明实施例的联接件的透视图。
图38是根据本发明实施例的沿着安装方向看时盒的安装状态的俯视图。
图39是显示了根据本发明实施例的处理盒(感光鼓)的驱动停止状态的透视图。
图40是显示了根据本发明实施例的处理盒的拆卸操作的纵向剖视图和透视图。
图41是显示了根据本发明第三实施例的设置在设备主组件中的门被打开的状态的剖视图。
图42是显示了根据本发明实施例的设备主组件的驱动侧的安装引导件的透视图。
图43是根据本发明实施例的盒的驱动侧的侧视图。
图44是从根据本发明实施例的盒的驱动侧看时的透视图。
图45是显示了根据本发明实施例的将盒插至设备主组件的插入状态的侧视图。
图46是显示了根据本发明第四实施例的将锁定件附接至鼓支承件的附接状态的透视图。
图47是显示了根据本发明实施例的鼓支承件、联接件和鼓轴的分解透视图。
图48是显示了根据本发明实施例的盒的驱动侧的透视图。
图49是显示了根据本发明实施例的驱动轴和联接件之间的接合状态的透视图和纵向剖视图。
图50是显示了根据本发明第五实施例的按压件安装至鼓支承件的状态的分解透视图。
图51是显示了根据本发明实施例的鼓支承件、联接件以及鼓轴的分解透视图。
图52是显示了根据本发明实施例的盒的驱动侧的透视图。
图53是显示了根据本发明实施例的驱动轴和联接件之间的接合状态的透视图和纵向剖视图。
图54是显示了根据本发明第六实施例的在装配主要元件之前的盒的分解透视图。
图55是显示了根据本发明实施例的驱动侧的侧视图。
图56是根据本发明实施例的鼓轴和联接件的示意性纵向剖视图。
图57是显示了根据本发明实施例的驱动轴与联接件之间的接合的纵向剖视图。
图58是显示了根据本发明实施例的联接件锁定件的变型例子的剖视图。
图59是显示了根据本发明第七实施例的磁元件附接至鼓支承件的附接状态的透视图。
图60是显示了根据本发明实施例的鼓支承件、联接件以及鼓轴的分解透视图。
图61是显示了根据本发明实施例的盒的驱动侧的透视图。
图62是显示了根据本发明实施例的驱动轴与联接件之间的接合状态的透视图和纵向剖视图。
图63是显示了根据本发明第八实施例的盒的驱动侧的透视图。
图64是显示了根据本发明实施例的装配支承件之前的状态的分解透视图。
图65是显示了根据本发明实施例的鼓轴、联接件以及支承件的结构的纵向剖视图。
图66是显示了根据本发明实施例的设备主组件引导件的驱动侧的透视图。
图67是显示了根据本发明实施例的锁定件的脱离状态的纵向剖视图。
图68是显示了根据本发明实施例的驱动轴与联接件之间的接合的纵向剖视图。
图69是显示了根据本发明第九实施例的盒的驱动侧的侧视图。
图70是显示了根据本发明实施例的设备主组件引导件的驱动侧的透视图。
图71是显示了根据本发明实施例的盒与主组件引导件之间的关系的侧视图。
图72是显示了根据本发明实施例的主组件引导件与联接件之间的关系的透视图。
图73是显示了根据本发明实施例的盒安装至主组件的过程的从驱动侧看时的侧视图。
图74是显示了根据本发明第十实施例的主组件引导件的驱动侧的透视图。
图75是显示了根据本发明实施例的主组件引导件与联接件之间的关系的侧视图。
图76是显示了根据本发明实施例的主组件引导件与联接件之间的关系的透视图。
图77是显示了根据本发明实施例的盒与主组件引导件之间的关系的侧视图。
图78是显示了根据本发明实施例的主组件引导件与联接件之间的关系的透视图。
图79是显示了根据本发明实施例的主组件引导件与联接件之间的关系的侧视图。
图80是显示了根据本发明实施例的主组件引导件与联接件之间的关系的透视图。
图81是显示了根据本发明实施例的主组件引导件与联接件之间的关系的侧视图。
图82是根据本发明第十一实施例的联接件的透视图和剖视图。
图83是根据本发明实施例的所述联接件的透视图和剖视图。
图84是根据本发明实施例的所述联接件的透视图和剖视图。
图85是根据本发明第十二实施例的联接件的透视图和剖视图。
图86是显示了根据本发明第十三实施例的联接件的透视图。
图87是显示了根据本发明实施例的鼓轴、驱动轴、联接件以及压迫件的剖视图。
图88是显示了根据本发明实施例的鼓轴、联接件、支承件以及驱动轴的剖视图。
图89是显示了根据本发明第十四实施例的鼓轴和联接件的透视图。
图90是显示了根据本发明实施例的驱动轴与联接件之间的接合过程的透视图。
图91是显示了根据本发明第十五实施例的鼓轴、联接件以及支承件的透视图和剖视图。
图92是显示了根据本发明第十六实施例的用于联接件的支撑方法(安装方法)的透视图。
图93是显示了根据本发明第十七实施例的用于联接件的支撑方法(安装方法)的透视图。
图94是根据本发明实施例的盒的透视图。
图95仅显示了根据本发明实施例的联接件。
图96显示了根据本发明实施例的具有联接件的鼓法兰。
图97是沿图84的S22-S22截取的剖视图。
图98是根据本发明实施例的感光鼓单元的剖视图。
图99是沿图85的S23-S23截取的剖视图。
图100是显示了根据本发明实施例的鼓轴与联接件的组合状态的透视图。
图101是显示了根据本发明实施例的联接件的倾斜状态的透视图。
图102是显示了根据本发明实施例的驱动轴与联接件之间的接合过程的透视图。
图103是显示了根据本发明实施例的驱动轴与联接件之间的接合过程的透视图。
图104是显示了根据本发明实施例的驱动轴、驱动齿轮、联接件以及鼓轴的分解透视图。
图105是显示了根据本发明实施例的联接件与驱动轴的脱离过程的透视图。
图106是显示了根据本发明实施例的鼓轴与联接件之间的组合状态的透视图。
图107是显示了根据本发明实施例的鼓轴与联接件之间的组合状态的透视图。
图108是显示了根据本发明实施例的鼓轴与联接件之间的组合状态的透视图。
图109是根据本发明实施例的从驱动侧看时第一框架单元的透视图,所述第一框架单元具有感光鼓。
图110是显示了根据本发明实施例的鼓轴和联接件的透视图。
图111是沿图79中S20-S20截取的剖视图。
图112是根据本发明实施例的感光鼓单元的透视图。
具体实施方式
将描述根据本发明实施例的处理盒和电子照相成像设备。
[第一实施例]
(1)处理盒的简单描述
将参照图1-4描述根据本发明实施例的处理盒B。图1是盒B的剖视图。图2和3是盒B的透视图。图4是电子照相成像设备主组件A(下面称作“设备主组件A”)的剖视图。设备主组件A对应于不包括盒B的电子照相成像设备的部分。
参照图1-3,盒B包括电子照相感光鼓107。如图4所示,当盒B安装在设备主组件A中时,感光鼓107通过借助连接机构从设备主组件A接收旋转力而旋转。使用者可以将盒B安装至设备主组件A以及从设备主组件A上拆卸。
作为充电装置(处理装置)的充电辊108被设置成与感光鼓107的外周表面接触。通过由设备主组件A施加电压,充电辊108给感光鼓107充电。充电辊108通过感光鼓107的旋转而旋转。
盒B包括作为显影装置(处理装置)的显影辊110。所述显影辊110向感光鼓107的显影区域供应显影剂。显影辊110利用显影剂t对形成在感光鼓107上的静电潜像进行显影。显影辊110中包含磁辊(固定磁体)111。与显影辊110的外周表面相接触地设置有显影刮刀112。显影刮刀112限定将要沉积在显影辊110的外周表面上的显影剂t的量。显影刮刀112赋予显影剂t摩擦带电电荷。
通过搅拌件115和116的旋转,包含在显影剂容纳容器114中的显影剂t被传送至显影室113a,进而使得被供应以电压的显影辊110旋转。因此,在显影辊110的表面上形成显影剂层,显影刮刀112将电荷施加给所述显影剂层。显影剂t根据潜像被传送到感光鼓107上。结果,潜像被显影。
形成在感光鼓107上的显影剂图像通过转印辊104转印到记录介质107上。记录介质102被用于在其上形成显影剂图像,其例如是记录纸、标签、OHP片材等等。
作为清洁装置(处理装置)的弹性清洁刮刀117a与感光鼓107的外周表面相接触地设置。清洁刮刀117a在其端部弹性地接触感光鼓107,并且移除在显影剂图像被转印到记录介质102上之后残留在感光鼓107上的显影剂t。通过清洁刮刀117a从感光鼓107的表面移除的显影剂t被容纳在移除显影剂槽117b中。
盒B由第一框架单元119和第二框架单元120整体构成。
所述第一框架单元119由作为盒框架B1的一部分的第一框架113构成。第一框架单元119包括显影辊110、显影刮刀112、显影室113a、显影剂容纳容器114以及搅拌元件115和116。
所述第二框架单元120由作为盒框架B1的一部分的第二框架118构成。第二框架单元120包括感光鼓107、清洁刮刀117a、移除显影剂槽117b以及充电辊108。
所述第一框架单元119和第二框架单元120彼此通过销P以可旋转方式连接。通过设置在第一和第二框架单元119和120之间的弹性件135(图3),显影辊110被压靠在感光鼓107上。
使用者通过抓住把手将盒B附接(安装)至设备主组件A的盒安装部130a。在所述安装过程中,如下所述,与盒B的安装操作同步地,设备主组件A的驱动轴180(图17)与盒B的作为旋转力传递件的联接件150(后面描述)彼此连接起来。通过从设备主组件A接收旋转力,感光鼓107或类似部件旋转。
(2)电子照相成像设备的描述
参照图4,将描述应用上述盒B的电子照相成像设备。
下面,将以激光束打印机作为设备主组件A的例子进行描述。
在成像过程中,通过充电辊108给旋转的感光鼓107的表面均匀地充电。然后,根据图像信息,利用从光学装置101发射的激光照射感光鼓107的表面,所述光学装置101包括诸如激光二极管、多面镜、透镜以及反射镜等未显示元件。结果,在感光鼓107上形成取决于图像信息的静电潜像。通过上述显影辊110对所述潜像进行显影。
另一方面,与成像操作同步地,通过进给辊103b以及输送辊对103c、103d和103e将设置在记录介质盒103a中的记录介质102输送至转印位置。在所述转印位置设置有作为转印装置的转印辊104。向转印辊104施加电压。结果,形成在感光鼓107上的显影剂图像被转印到记录介质102上。
显影剂图像被转印到其上的记录介质102通过引导件103f被输送至定影装置105。所述定影装置105包括驱动辊105c以及其内包含加热器105a的定影辊105b。向通过的记录介质102施加热量和压力,从而显影剂图像被定影在记录介质102上。结果,在记录介质102上形成图像。随后,记录介质102通过辊对103g和103h被输送并被排放到托盘106上。上述辊103b、输送辊对103c、103d和103e、引导件103f、辊对103g和103h等部件构成了用于输送记录介质102的输送装置103。
盒安装部130a是用于在其内安装盒B的部分(空间)。在盒B位于所述空间的状态下,盒B的联接件150(后面描述)与设备主组件A的驱动轴相连。在该实施例中,将盒B安装至安装部130a称作“将盒B安装至设备主组件A”。另外,将盒B从安装部130b上拆卸(移除)称作“将盒B从设备主组件A上拆卸”。
(3)鼓法兰的构造的描述
首先,将参照图5描述位于旋转力从设备主组件A传递至感光鼓107这一侧(后面简称为“驱动侧”)的鼓法兰。图5(a)是在驱动侧的鼓法兰的透视图,图5(b)是沿着图5(a)所示的S1-S1线截取的鼓法兰的剖视图。顺便提一句,相对于感光鼓的轴线方向,与驱动侧相对的一侧被称作“非驱动侧”。
鼓法兰151由树脂材料通过射出成型形成。树脂材料的例子可包括聚缩醛、聚碳酸酯等等。鼓轴153由诸如铁、不锈钢等金属材料形成。根据用于旋转感光鼓107的负荷扭矩,可以适当地选择用于鼓法兰151和鼓轴153的材料。例如,鼓法兰151还可以由金属材料形成并且鼓轴153还可以由树脂材料形成。当鼓法兰151和鼓轴153均由树脂材料形成时,它们能够被整体地成型。
法兰151设有与感光鼓107的内表面接合的接合部151a、用于将旋转力传递至显影辊110的齿轮部(斜齿轮或正齿轮)151c以及以可旋转方式支撑在鼓轴承上的接合部151d。更具体地说,关于法兰151,接合部151a与圆筒形鼓107a的一端接合(这一点将在下面描述)。所述接合部、齿轮部与感光鼓107的旋转轴线L1同轴地设置。鼓接合部151a具有圆筒形状,并且设置有与其垂直的基部151b。所述基部151b设有在轴线L1的方向上向外突出的鼓轴153。所述鼓轴153与鼓接合部151a同轴。鼓轴固定成与旋转轴线L1同轴。至于其固定方法,可利用压入配合、粘结、嵌件成型等等,并且适当地选择它们。
鼓轴153包括具有突起构造的圆形柱部153a并且设置成与感光鼓107的旋转轴线同轴。所述鼓轴153设置在感光鼓107的位于感光鼓107的轴线L1上的端部上。另外,考虑到材料、负荷和空间等因素,鼓轴153的直径大约是5-15mm。正如下面将要详细描述的那样,圆形柱部153a的自由端部153b具有半球形面构造,使得当作为旋转力传递部的鼓联接件150的轴线倾斜时,它能够平滑地倾斜。另外,为了从鼓联接件150接收旋转力,在鼓轴153的自由端的感光鼓107侧设置有旋转力传递销(旋转力接收件(部))155。所述销155沿着与鼓轴153的轴线大致垂直的方向延伸。
作为旋转力接收件的销155具有圆柱形状,其直径小于鼓轴153的圆形柱部153a的直径。并且,销155通过压入配合、粘结等被固定至鼓轴153。销155沿着其轴线与感光鼓107的轴线L1横交的方向被固定。优选地,期望将销155的轴线设置成穿过鼓轴153(图5(b))的自由端部153b的球形面的中心P2。虽然自由端部153b实际上是半球形面构造,但是中心P2是一假想球形面的中心,所述半球形面组成所述假想球形面的一部分。另外,可以适当地选择销155的数目。在该实施例中,从装配性能的角度出发并且为了确定地传递驱动扭矩,使用单个销155。所述销155经过所述中心P2并且通过鼓轴153。并且销155在鼓轴153的外周表面的径向相对的位置(155a1,155a2)处向外突出。更具体地说,销155在所述两个相对位置(155a1,155a2)处相对于鼓轴153沿着与鼓轴153的轴线(轴线L1)垂直的方向突出。由此,鼓轴153在所述两个位置处从鼓联接件150接收旋转力。在该实施例中,销155在距离鼓轴153的自由端5mm的范围内安装至鼓轴153。然而,本发明并不限制于此。
另外,在将鼓联接件150(下面将被描述)安装至法兰151的过程中,由接合部151d和基部151b所形成的空隙部151e接纳鼓联接件150的一部分。
在该实施例中,法兰151上安装有用于将旋转力传递至显影辊110的齿轮部151c。然而,可以不通过法兰151传递显影辊110的旋转。在那种情况下,齿轮部151c是不必要的。然而,在法兰151上设置齿轮部151c的情况下,齿轮部151c能够与法兰151整体成型。
正如将在下面描述的,法兰151、鼓轴153以及销155用作从鼓联接件150接收旋转力的旋转力接收件。
(4)电子照相感光件鼓单元的结构
参照图6和图7,将描述电子照相感光件鼓单元(“鼓单元”)的结构。图6(a)是从驱动侧看时鼓单元U1的透视图,图6(b)是从非驱动侧看时的透视图。另外,图7是沿着图6(a)的S2-S2截取的剖视图。
感光鼓107具有圆筒形鼓107a,在其外周表面上涂覆有感光层107b。
圆筒形鼓107a具有诸如铝的导电圆筒并且感光层107b施加于其上。圆筒形鼓107a的相对两端设有鼓表面以及大致同轴的开口107a1和107a2以便与鼓法兰151和152接合。更具体地说,鼓轴153与圆筒形鼓107a同轴地设置在圆筒形鼓107a的端部上。附图标记151c表示齿轮,其将联接件150从驱动轴180接收的旋转力传递至显影辊110。齿轮151c与法兰151整体地成型。
圆筒107a可以是空心的或实心的。
至于驱动侧的鼓法兰151,由于前面已经对其进行了描述,所以省略描述。
非驱动侧的鼓法兰152借助注射成型由类似于驱动侧的树脂材料制造。鼓接合部152b和支承部152a彼此大致同轴地设置。另外,法兰152设有鼓接地板156。所述鼓接地板156是导电薄板(金属)。鼓接地板156包括与导电圆筒形鼓107a的内表面接触的接触部156b1、156b2以及与鼓接地轴154(将在后面描述)接触的接触部156a。为了实现使感光鼓107接地的目的,鼓接地板156与设备主组件A电连接。
与驱动侧相类似,非驱动侧的鼓法兰152借助注射成型树脂材料制造。鼓接合部152b和支承部152a彼此大致同轴地设置。另外,法兰152设有鼓接地板156。所述鼓接地板156是导电薄板(金属)。鼓接地板156包括与导电圆筒形鼓107a的内表面接触的接触部156b1、156b2以及与鼓接地轴154(将在后面描述)接触的接触部156a。为了使感光鼓107接地,鼓接地板156与设备主组件A电连接。
虽然已经描述了鼓接地板156设在法兰152中,但是本发明并不限于这种例子。例如,鼓接地板156可以设置在鼓法兰151处,并且可以适当地选择能够与地连接的位置。
因此,鼓单元U1包括具有圆筒107a、法兰151、法兰152、鼓轴153、销155以及鼓接地板156的感光鼓107。
(5)旋转力传递部(鼓联接件)
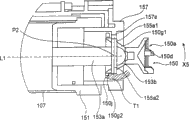
将参照图8以作为旋转力传递部的鼓联接件为例进行描述。图8(a)是从设备主组件侧看时鼓联接件的透视图,图8(b)是从感光鼓侧看时鼓联接件的透视图,图8(c)是沿着与联接件旋转轴L2的方向垂直的方向看时的视图。另外,图8(d)是从设备主组件侧看时鼓联接件的侧视图,图8(e)是从感光鼓侧看时的图,图8(f)是沿着图8(d)的S3截取的剖视图。
在盒B被安装设置于安装部130a的状态下,鼓联接件(“联接件”)150与设备主组件A的驱动轴180(图17)接合。另外,当盒B从设备主组件A取出时,联接件150与驱动轴180脱离。在联接件150与驱动轴180接合的状态下,联接件150通过驱动轴180从设置在设备主组件A中的电机接收旋转力。另外,联接件150将其旋转力传递至感光鼓107。可用于联接件150的材料是树脂材料,诸如聚缩醛、聚碳酸酯和PPS。然而,为了提高联接件150的刚性,可以对应于所需负荷扭矩在上述树脂材料中混合玻璃纤维、碳纤维等等。在混合所述材料的情况下,能够提高联接件150的刚性。而且,可以在树脂材料中嵌入金属,从而可以进一步提高刚性,并且整个联接件可以由金属等制造。
联接件150主要包括三个部分。
第一部分可以与驱动轴180(后面将要描述)接合,它是联接件侧从动部150a,用于从设置在驱动轴180上的作为旋转力施加部(主组件侧旋转力传递部)的旋转力传递销182接收旋转力。另外,第二部分可以与销155接合,它是用于将旋转力传递至鼓轴153的联接件侧驱动部150b。另外,第三部分是用于将从动部150a与驱动部150b彼此连接起来的连接部150c(图8(c)和(f))。
所述从动部150a、驱动部150b以及连接部150c可以整体地成型,或者是能够可以彼此相连的分开的部件。在该实施例中,它们由树脂材料整体成型。由此,联接件150的制造是容易的并且作为部件的精度是高的。如图8(f)所示,从动部150a设有朝着联接件150的旋转轴线L2扩张的驱动轴插入开口部150m。驱动部150b具有朝着旋转轴线L2扩张的鼓轴插入开口部150l。
所述开口150m具有作为扩张部的锥形驱动轴接收面150f,在联接件150安装至设备主组件A的状态下,所述接收面150f朝着驱动轴180侧扩张。如图8(f)所示,所述接收面150f构成一凹部150z。相对于轴线L2的方向,在与邻近感光鼓107的一侧相对的位置,所述凹部150z包括开口150m。
由此,无论盒B中的感光鼓107的旋转相位如何,联接件150能够相对于感光鼓107的轴线L1在旋转力传递角位置、预接合角位置以及脱离角位置之间枢转,而不会被驱动轴180的自由端部阻止。后面将描述旋转力传递角位置、预接合角位置以及脱离角位置。
在凹部150z的端面上,多个突起(接合部)150d1-150d4围绕轴线L2以等间隔设置在圆周上。在相邻的突起150d1、150d2、150d3、150d4之间,设置待用部分150k1、150k2、150k3和150k4。相邻突起150d1-150d4之间的间隔大于销182的外径,从而接纳设置在设备主组件A中的驱动轴180的旋转力传递销(旋转力施加部)。相邻突起之间的凹部是待用部分150k1-k4。当旋转力从驱动轴180传递至联接件150时,传递销182a1、182a2由待用部分150k1-k4中的任何一个接纳。另外,在图8(d)中,在每个突起150d的顺时针方向X1的下游,设置有与联接件150的旋转方向横交的旋转力接收面(旋转力接收部)150e(150e1-150e4)。更具体地说,突起150d1具有接收面150e1,突起150d2具有接收面150e2,突起150d3具有接收面150e3,突起150d4具有接收面150e4。在驱动轴180旋转的状态下,销182a1、182a2与接收面150e1-150e4中的任何一个接触。由此,由销182a1、182a2接触的接收面150e被销182推压。由此,联接件150围绕轴线L2旋转。接收面150e1-150e4沿着与联接件150的旋转方向横交的方向延伸。
为了使传递给联接件150的运行扭矩尽可能地稳定,期望将这些旋转力接收面150e设置在一中心位于轴线L2上的同一圆周上。由此,旋转力传递半径是恒定的并且传递给联接件150的运行扭矩得以稳定。另外,至于突起150d1-150d4,优选的是其位置使得:借助联接件所受到的力的平衡,联接件150能够稳定。因此,在该实施例中,接收面150e被设置在径向相对的位置(180度)。更具体地说,在该实施例中,接收面150e1与接收面150e3相对于彼此径向相对,并且接收面150e2与接收面150e4相对于彼此径向相对(图8(d))。通过这种布置,联接件150接收的力构成力耦。因此,联接件150能够仅仅通过接收力耦而继续旋转运动。因此,无需对联接件150的旋转轴线L2的位置特别规定,联接件150就能够旋转。另外,至于接收面的数目,只要驱动轴180的销182(旋转力施加部)能够进入待用部分150k1-150k2,就可以适当地选择。在该实施例中,如图8所示,设置四个接收面。该实施例并不限于该例子。例如,接收面150e(突起150d1-150d4)不需要被设置在相同的圆周上(图8(d)中的假想圆C1)。或者,没有必要设置在径向相对的位置上。然而,通过如上所述设置接收面150e能够提供上述效果。
这里,在该实施例中,销的直径大约是2mm,待用部分150k的周向长度大约是8mm。待用部分150k的周向长度是(假想圆上)相邻突起150d之间的间隔。所述尺寸并不限制本发明。
类似于开口150m,鼓轴插入开口部1501具有作为扩张部的锥形旋转力接收面150i,在鼓轴153安装至盒B的状态下,所述接收面150i朝着鼓轴153扩张。如图8(f)所示,所述接收面150i构成一凹部150q。
由此,无论盒B中的感光鼓107的旋转相位如何,联接件150均能够相对于鼓轴线L1在旋转力传递角位置、预接合角位置以及脱离角位置之间枢转,而不会被鼓轴153的自由端部阻止。在图示例子中凹部150q由锥形接收面150i构成,所述锥形接收面150i定中心在轴线L2上。在接收面150i中设置有待用开口150g1或150g2(“开口”)(图8(b))。至于联接件150,销155能够被插入开口150g1或150g2的内部以便它可以被安装至鼓轴153。并且,开口150g1或150g2的尺寸大于销155的外径。通过这样做,无论盒B中的感光鼓107的旋转相位如何,联接件150均能够如后面将描述的那样在旋转力传递角位置和预接合角位置(或者脱离角位置)之间枢转,而不会被销155阻止。
更具体地说,突起150d邻近凹部150z的自由端设置。突起150d沿着与联接件150旋转的旋转方向横交的横交方向突出并且沿着该旋转方向以预定间隔设置。在盒B被安装至设备主组件A的状态下,接收面150e与销182接合或抵靠并且由销182推压。
由此,接收面150e从驱动轴180接收旋转力。另外,这些接收面150e与轴线L2等距地设置,并且关于轴线L2成对设置,L2位于每对接收面之间,所述接收面由突起150d中沿着上述横交方向的表面构成。另外,待用部分(凹部)150k沿着旋转方向设置,并且它们沿轴线L2的方向凹陷。
待用部分150k形成为相邻突起150d之间的间隙。在盒B被安装至设备主组件A的状态下,销182进入待用部分150k,并且它准备被驱动。当驱动轴180旋转时,销182推压接收面150e。
由此,联接件150旋转。
旋转力接收面(旋转力接收件(部))150e可以设置在驱动轴接收面150f内侧。或者,接收面150e可以设置在相对于轴线L2的方向从接收面150f向外突出的部分中。当接收面150e设置在接收面150f的内侧时,待用部分150k设置在接收面150f的内侧。
更具体地说,待用部分150k是位于接收面150f的弧形部内侧的、设置在突起150d之间的凹部。另外,当接收面150e设置在向外突出的位置时,待用部分150k是位于突起150d之间的凹部。这里,凹部可以是沿着轴线L2的方向延伸的通孔,或者它可以在其一端封闭。更具体地说,所述凹部由位于突起150d之间的空间区域提供。必需的一点仅仅是在盒B安装至设备主组件A的状态下销182能够进入所述区域中。
待用部分的这些结构同样适用于后面将要描述的实施例。
在图8(e)中,旋转力传递面(旋转力传递部)150h(150h1或150h2)相对于顺时针方向X1设置在开口150g1或150g2的上游。旋转力通过与销155a1、155a2中的任何一个接触的传递部150h1或150h2从联接件150传递至感光鼓107。更具体地说,传递面150h1或150h2推压销155的侧面。由此,联接件150旋转,并且其中心与轴线L2对准。传递面150h1或150h2沿着与联接件150的旋转方向横交的方向延伸。
类似于突起150d,期望的是在相同圆周上相对于彼此径向相对地设置传递面150h1或150h2。
在利用注射成型制造鼓联接件150时,连接部150c可以变薄。这是由于联接件被制造成驱动力接收部150a、驱动部150b和连接部150c具有大致均等的厚度。因此,当连接部150c的刚性不够时,可以将连接部150c制造得较厚,从而使从动部150a、驱动部150b和连接部150c具有大致相同的厚度。
(6)鼓支承件
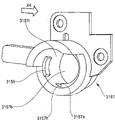
关于鼓支承件,将参照图9进行描述。图9(a)是从驱动轴侧看时的透视图,图9(b)是从感光鼓侧看时的透视图。
鼓支承件157将感光鼓107以可旋转方式支撑在第二框架118上。另外,支承件157具有将第二框架单元120定位在设备主组件A中的功能。另外,它具有保持联接件150使得旋转力能够被传递至感光鼓107的功能。
如图9所示,定位至第二框架118上的接合部157d与定位在设备主组件A中的外围部157c大致同轴地设置。接合部157d和外围部157c是环形的,联接件150设置于其内的空间部157b中。在相对于轴向方向的中央部附近,接合部157d和外围部157c设有用于将联接件150保持在盒B中的肋157e。支承件157设有穿透抵靠面157f的孔157g1或157g2以及用于将支承件157固定至第二框架118的固定螺钉。如同下面将要描述的那样,在支承件157上一体地设置有用于相对设备主组件A安装或拆卸盒B的引导部157a。
(7)联接件安装方法
参照图10-16,将描述联接件的安装方法。图10(a)是从驱动侧表面看时围绕感光鼓的主要部件的放大视图。图10(b)是从非驱动侧表面看时所述主要部件的放大视图。图10(c)是沿图10(a)的S4-S4截取的剖视图。图11(a)和(b)是分解透视图,其显示了在附接第二框架单元的主要部件之前的状态。图11(c)是沿图11(a)的S5-S5截取的剖视图。图12是显示附接之后的状态的剖视图。图13是沿图11(a)的S6-S6截取的剖视图。图14是一剖视图,其显示了将旋转联接件和感光鼓从图13的状态旋转90度之后的状态。图15是显示了鼓轴和联接件的组合状态的透视图。图15(a1)-(a5)是从感光鼓的轴向方向看时的前视图,图15(b1)-(b5)是透视图。图16是显示了联接件在处理盒中倾斜的状态的透视图。
如图15所示,联接件150被安装成其轴线L2能够相对于鼓轴153的轴线L1(与感光鼓107同轴)沿任何方向倾斜。
在图15(a1)和图15(b1)中,联接件150的轴线L2与鼓轴153的轴线L1同轴。在图15(a2)和(b2)中示出了联接件150从该状态向上倾斜时的状态。如该图所示,当联接件150朝着开口150g侧倾斜时,开口150g沿着销155移动。结果,联接件150围绕着与销155的轴线垂直的轴线AX倾斜。
在图15(a3)和(b3)中,显示了联接件150向右倾斜的状态。如该图所示,当联接件150沿着开口150g的正交方向倾斜时,开口150g围绕销155旋转。旋转轴线是销155的轴线AY。
图15(a4)和(b4)显示了联接件150向下倾斜的状态,图15(a5)和(b5)显示了联接件150向左倾斜的状态。旋转轴线AX和AY在前面已经进行了描述。
通过对沿轴线AX方向的旋转和AY方向的旋转进行组合,可以实现不同于前面所描述的倾斜方向的倾斜,例如沿着图15(a1)中45度方向倾斜等等。因此,轴线L2能够相对于轴线L1沿任何方向枢转。
更具体地说,传递面(旋转力传递部)150h相对于销(旋转力接收部)155能够移动。销155使得传递面150h处于可移动状态。传递面150h与销155沿联接件150的旋转方向彼此接合。以这种方式,联接件150被安装至盒。为了实现这个,在传递面150h与销155之间设有间隙。由此,联接件150相对于轴线L1基本上能够沿所有方向枢转。
如上所述,开口150g沿着至少与销155的突出方向横交的方向(联接件150的旋转轴线方向)延伸。因此,如之前已经描述的,联接件150可以沿着任何方向枢转。
已经提到,轴线L2可以相对于轴线L1沿任何方向歪斜或倾斜。然而,在联接件150中沿着整个360度范围的方向,轴线L2不是必需可线性倾斜预定角度。例如,开口150g能够被设计成沿圆周方向略微更宽。由此,在轴线L2相对于轴线L1倾斜时,即使在轴线L2不能线性地倾斜至预定角度的情况下,联接件150也能够围绕轴线L2旋转微小的度数。因此,它能够倾斜至预定角度。换言之,沿开口150g的旋转方向的游隙量可以在需要时进行适当地设计。
以这种方式,联接件150相对于鼓轴(旋转力接收件)153可以大致旋转或回转整个圆周。更具体地说,联接件150相对于鼓轴153可以大致在其整个圆周范围内枢转。
而且,正如从前面解释所理解的,联接件150能够沿着鼓轴153的圆周方向并且基本上能够在鼓轴153的整个圆周方向上“旋转”。这里的“旋转”运动并不是指联接件本身围绕轴线L2旋转的运动,而是指倾斜轴线L2围绕感光鼓的轴线L1旋转,不过这里“旋转”不排除联接件本身围绕联接件150的轴线L2的旋转。
下面将描述装配这些部件的过程。
首先,沿着图11(a)和图11(b)中的方向X1安装感光鼓107。此时,使得法兰151的支承部151d与第二框架118的对中部118h大致同轴地接合。另外,支承孔152a(图7的法兰152)与第二框架118的对中部118g大致同轴地接合。
鼓接地轴154沿着方向X2被插入。对中部154b穿过支承孔152a(图6b)和对中孔118g(图10(b))。此时,对中部154b和支承孔152a被支撑成使得感光鼓107可旋转。另一方面,对中部154b和对中孔118g通过压入配合等被固定地支撑。由此,感光鼓107相对于第二框架被以可旋转方式支撑。替换性地,它可以相对于法兰152以不可旋转方式被固定,并且鼓接地轴154(对中部154b)可以以可旋转方式安装至第二框架118。
联接件150和支承件157沿着方向X3被插入。首先,驱动部150b朝着方向X3的下游被插入,同时保持轴线L2(图11c)与方向X3平行。此时,销155的相位与开口150g的相位彼此匹配,并且使销155插入开口150g1或150g2。并且鼓轴153的自由端部153b抵接鼓支承面150i。所述自由端部153b是球形面而鼓支承面150i是锥形面。也就是说,作为凹部的锥形鼓支承面150i与作为突起的鼓轴153的自由端部153b彼此接触。因此,驱动部150b侧相对于自由端部153b定位。正如前面已经描述的,当联接件150通过从设备主组件A传递的旋转力旋转时,定位在开口150g中的销155将被旋转力传递面(旋转力传递部)150h1或150h2(图8b)推动。由此,旋转力被传递至感光鼓107。随后,相对于方向X3向下游插入接合部157d。由此,联接件150的一部分被接纳在空间部157b中。接合部157d支撑法兰151的支承部151d,从而感光鼓107可以旋转。另外,接合部157d与第二框架118的对中部118h接合。支承件157的抵接面157f抵靠至第二框架118的抵接面118i。螺钉158a、158b穿过孔157g1或157g2,并且它们被固定至第二框架118的螺纹孔118k1、118k2,从而支承件157被固定至第二框架118(图12)。
下面将描述联接件150的各个部分的尺寸。如图11(c)所示,从动部150a的最大外径是φD2,驱动部150b的最大外径是φD1,待用开口150g的小直径是φD3。另外,销155的最大外径是φD5,支承件157的保持肋157e的内径是φD4。这里,最大外径是围绕轴线L1或轴线L2的最大旋转轨迹的外径。此时,由于满足φD5<φD3,所以能够通过沿方向X3的笔直安装操作将联接件150装配至预定位置,因此装配性能是高的(装配后的状态如图12所示)。支承件157的保持肋157e的内表面直径φD4大于联接件150的φD2并小于φD1(φD2<φD4<φD1)。由此,仅仅沿方向X3笔直的安装步骤就足以将支承件157装配至预定位置。因此,能够改善装配性能(装配之后的状态如图12所示)。
如图12所示,在轴线L1的方向上,支承件157的保持肋157e接近联接件150的凸缘部150j设置。更具体地说,在轴线L1的方向上,凸缘部150j的端面150j1与销155的轴线L4的距离是n1。另外,肋157e的端面157e1与凸缘部150j的另一端面157j2的距离是n2。距离n2和距离n1满足如下关系:距离n2<距离n1。
另外,就垂直于轴线L1的方向而言,凸缘部150j和肋157e被设置成它们相对彼此交叠。更具体地说,肋157e的内表面157e3与凸缘部150j的外表面150j3的距离n4是在与轴线L1的正交方向上的交叠量n4。
通过这种设置,防止了销155从开口150g脱离。也就是说,通过支承件157限制了联接件150的运动。因此,联接件150不会与盒脱离。无需附加零件就能够实现预防脱离。从降低制造和装配成本的角度看,上述尺寸是合乎需要的。然而,本发明并不限于这些尺寸。
如上所述(图10(c)和图13),联接件150的作为凹部150q的接收面150i与鼓轴153的作为突起的自由端面153b接触。因此,联接件150围绕自由端部(球形面)153b的中心P2沿着自由端部(球形面)153b摆动;换言之,无论鼓轴153的相位如何,轴线L2均可以大致沿任何方向枢转。联接件150的轴线L2可以大致沿任何方向枢转。正如后面将要描述的,为了使联接件150可以与驱动轴180接合,在就要接合之前,轴线L2相对于轴线L1朝着盒B的安装方向的下游倾斜。换言之,如图16所示,轴线L2倾斜成使得从动部150a相对于感光鼓107(鼓轴153)的轴线L1位于安装方向X4的下游侧。在图16(a)-(c)中,虽然从动部150a的位置相对彼此稍微不同,但是它们在任何情况下都相对于安装方向X4定位在下游侧。
下面将进行更详细的描述。
如图12所示,对驱动部150b的最大外径部与支承件157之间的距离n3进行选择使得在它们之间提供小的间隙。由此,正如之前已经描述的,联接件150可以枢转。
如图9所示,肋157e是半圆肋。肋157e相对于盒B的安装方向X4设置在下游。因此,如图10(c)所示,轴线L2的从动部150a侧可以沿着方向X4大幅枢转。换言之,在未设置肋157e的相位(图9(a)),轴线L2的驱动部150b侧可以沿着角度α3的方向进行大的枢转。图10(c)显示了轴线L2倾斜的状态。另外,轴线L2还能够从图10(c)所示的倾斜轴线L2的状态枢转至图13所示的大致平行于轴线L1的状态。以这种方式设置肋157e。由此,能够通过简单的方法将联接件150安装至盒B。而且,不管鼓轴153以什么相位停止,轴线L2都可以相对于轴线L1枢转。所述肋不限制于半圆肋。可以使用任何肋,只要联接件150可以枢转至预定方向并且可以将联接件150安装至盒B(感光鼓107)即可。以这种方式,肋157e具有作为用于调节联接件150的倾斜方向的调节装置的作用。
另外,沿轴线L1方向从肋157e到凸缘部150j的距离n2(图12)短于从销155的中心到驱动部150b侧边缘的距离n1。由此,销155不会从开口150g脱离。
如上所述,联接件150实质上同时由鼓轴153和鼓支承件157支撑。更具体地说,联接件150实质上通过鼓轴153和鼓支承件157安装至盒B。
联接件150沿轴线L1的方向相对于鼓轴153具有游隙(距离n2)。因此,接收面150i(锥形面)不会与鼓轴自由端部153b(球形面)紧密接触。换言之,枢转的中心可以与球形面的曲率中心P2偏离。然而,即使在这种情况下,轴线L2也可以相对于轴线L1枢转。因此,能够实现该实施例的目的。
另外,轴线L1与轴线L2之间的最大可能倾斜角α4(图10(c))是轴线L2与接收面150i之间的锥形角(α1,图8(f))的一半。接收面150i具有锥形形状,鼓轴153具有圆柱形状。因此,在它们之间设置角度α1/2的间隙g。由此,改变锥形角α1,以将此联接件150的倾斜角α4设置为最佳值。以这种方式,由于接收面150i是锥形面,鼓轴153的圆形柱部153a的这种简单的圆柱形状是令人满意的。换言之,鼓轴不需要具有复杂的构造。因此,能够抑制鼓轴的机加工成本。
另外,如图10(c)所示,当联接件150倾斜时,联接件的一部分能够进入法兰151的空间部151e(由阴影线示出)中。由此,齿轮部151c的用来减轻重量的腔(空间部151e)能够被利用。因此,能够有效地利用所述空间。顺便说一句,通常不使用所述用来减轻重量的腔(空间部151e)。
如上所述,在图10(c)的实施例中,联接件150被安装成其一部分可以位于相对轴线L2的方向与齿轮部151c交叠之处。在法兰不具有齿轮部151c的情况下,联接件150的一部分能够进一步进入圆筒107a中。
当轴线L2倾斜时,结合考虑销155的尺寸来选择开口150g的宽度,以使得销155不会干涉。
更具体地说,传递面(旋转力传递部)150h相对于销(旋转力接收部)155可移动。销155使传递面150处于可移动状态。传递面150h与销155沿联接件150的旋转方向彼此接合。以这种方式,联接件150被安装至盒。为了实现这个,在传递面150h与销155之间设有间隙。由此,联接件150相对于轴线L1可以大致沿任何方向枢转。
在图14中,当从动部150a侧沿方向X5倾斜时凸缘部150j的轨迹由区域T1示出。如图所示,即使联接件150倾斜,也不会发生与销155的干涉,并且因此能够在联接件150(图8(b))的整个圆周上设置凸缘部150j。换言之,轴接收面150i具有锥形形状,并且因此当联接件150倾斜时,销155不会进入区域T1中。因此,减小了联接件150的切除区域。因此,能够确保联接件150的刚性。
在上述安装过程中,沿方向X2的过程(非驱动侧)和沿方向X3的过程(驱动侧)可以交换。
支承件157被描述为借助螺钉固定至第二框架118。然而,本发明并不限制于这个例子。例如,可以使用诸如粘结的任何方法,只要支承件157可以固定至第二框架118。
(8)设备主组件的驱动轴和驱动结构
参照图17,将描述用于在设备主组件A中驱动感光鼓107的结构。图17(a)是在盒B未安装至设备主组件A的状态下驱动侧的侧板的部分剖开透视图。图17(b)是仅示出鼓驱动结构的透视图。图17(c)是沿图17(b)的S7-S7截取的剖视图。
驱动轴180具有与上述鼓轴153大致相似的结构。换言之,其自由端部180b形成半球面。另外,它具有大致穿透中心的、作为圆柱形主部180a的旋转力施加部的旋转力传递销182。旋转力通过销182被传递至联接件150。
在驱动轴180的自由端部180b的纵向相对侧上设置有与驱动轴180的轴线大致同轴的鼓驱动齿轮181。所述齿轮181相对于驱动轴180以不可旋转方式被固定。因此,齿轮181的旋转也旋转驱动轴180。
另外,齿轮181与用于从电机186接收旋转力的小齿轮187啮合。因此,电机186的旋转将通过齿轮181旋转驱动轴180。
另外,齿轮181通过支承件183、184以可旋转方式安装至设备主组件A。此时,齿轮181相对于驱动轴180(齿轮181)的轴向方向L3的方向不移动,也就是说,它相对于方向L3定位。因此,齿轮181和支承件183、184相对于所述轴向方向能够相对于彼此紧密地设置。另外,驱动轴180相对于轴线L3的方向不移动。因此,驱动轴180以及支承件183和184之间的间隙具有允许驱动轴180旋转的尺寸。因此,确保了齿轮181相对于齿轮187在直径方向上正确定位。
另外,虽然已经描述了驱动力从齿轮187直接传递至齿轮181,但是本发明并不限制于这个例子。例如,针对设置在设备主组件A上的电机使用多个齿轮也能获得令人满意的结果。替换性地,可以通过皮带等传递旋转力。
(9)用于引导盒B的主组件侧安装引导件
如图18和19所示,该实施例的安装装置130包括设置在设备主组件A中的主组件引导件130R1、130R2、130L1、130L2。
它们相对地设置于设备主组件A中的盒安装空间(盒设置部130a)的两个侧面(图18中的驱动侧面以及图19中的非驱动侧面)。主组件引导件130R1、130R2与盒B的驱动侧相对地设置在主组件中,并且它们沿着盒B的安装方向延伸。另一方面,主组件引导件130L1、130L2与盒B的非驱动侧相对地设置在主组件中,并且它们沿着盒B的安装方向延伸。主组件引导件130R1、130R2和主组件引导件130L1、130L2彼此相对。在将盒B安装至设备主组件A时,如后面将要描述的,这些引导件130R1、130R2、130L1、130L2引导着盒引导件。在将盒B安装至设备主组件A时,要打开盒门109,所述盒门109能够围绕轴109a相对设备主组件A打开和关闭。并且,通过关闭门109而完成将盒B安装到设备主组件A中的操作。在从设备部主组件A取出盒B时,打开门109。由使用者实施这些操作。
(10)盒B相对于安装引导件和设备主组件A的定位部
如图2和3所示,在该实施例中,支承件157的外侧端的外围157a还用作盒引导件140R1。另外,鼓接地轴154的外侧端的外围154a还用作盒引导件140L1。
另外,第二框架单元120的一个纵向端(驱动侧)在盒引导件140R1的上面部分上设有盒引导件140R2。沿纵向方向的另一端(非驱动侧)在盒引导件140L1的上面部分上设有盒引导件140L2。
更具体地说,感光鼓107的一个纵向端设有从盒框架B1向外突出的盒侧引导件140R1、140R2。另外,沿纵向的另一端设有从盒框架B1向外突出的盒侧引导件140L1、140L2。引导件140R1、140R2、140L1、140L2沿着所述纵向朝着外侧突出。具体而言,引导件140R1、140R2、140L1、140L2沿着轴线L1从盒框架B1突出。在将盒B安装至设备主组件A时,以及在将盒B从设备主组件A拆下时,引导件140R1由引导件130R1引导,并且引导件140R2由引导件130R2引导。另外,在将盒B安装至设备主组件A时,以及在将盒B从设备主组件A拆下时,引导件140L1由引导件130L1引导,并且引导件140L2由引导件130L2引导。以这种方式,盒B沿着大致垂直于驱动轴180的轴向方向L3的方向移动被安装至设备主组件A,并且类似地将盒B从设备主组件A拆卸。另外,在该实施例中,盒引导件140R1、140R2与第二框架118整体地成型。然而,可以使用单独的元件作为盒引导件140R1、140R2。
(11)处理盒的安装操作
参照图20,将描述将盒B安装到设备主组件A中的操作。图20显示了所述安装过程。图20是沿着图18的S9-S9截取的剖视图。
如图20(a)所示,使用者打开门109。盒B相对于设置在设备主组件A中的盒安装装置130(安装部130a)以可拆卸方式安装。
在将盒B安装至设备主组件A时,在驱动侧,如图20(b)所示,沿着主组件引导件130R1、130R2插入盒引导件140R1、140R2。另外,在非驱动侧,沿着主组件引导件130L1、130L2(图19)插入盒引导件140L1、140L2(图3)。
当盒B被进一步沿着箭头X4的方向插入时,建立驱动轴180与盒B之间的联接,然后盒B被安装至预定位置(安装部130a)(准备好成像)。换言之,如图20(c)所示,盒引导件140R1与主组件引导件130R1的定位部130R1a接触,并且盒引导件140R2与主组件引导件130R2的定位部130R2a接触。另外,由于该状态是大致对称的,所以盒引导件140L1与主组件引导件130L1的定位部130L1a(图19)接触,并且盒引导件140L2与主组件引导件130L2的定位部130L2a接触(未示出)。以这种方式,盒B通过安装装置130以可拆卸方式安装至安装部130a。更具体地说,盒B在定位在设备主组件A中的状态下被安装。并且,在盒B被安装至安装部130a的状态下,驱动轴180与联接件150处于相对彼此接合的状态。
更具体地说,正如后面将要描述的,联接件150位于旋转力传递角位置。
通过将盒B安装至设置部130a,能够进行成像操作。
当盒B被设置在预定位置时,盒B的按压接收部140R1b(图2)从压迫弹簧188R(图18,图19和图20)接收压迫力。另外,按压接收部140L1b(图3)从压迫弹簧188L接收压迫力。由此,相对于设备主组件A的转印辊、光学装置等正确地定位盒B(感光鼓107)。
使用者可以如上所述使盒B进入至设置部130a。替换性地,使用者使盒B进入到一半位置处,并且可以通过另外的手段实施最后的安装操作。例如,利用关闭门109的操作,门109的一部分作用在处于安装路径上的位置处的盒B上,以将盒B推入最后安装位置。另外替换性地,使用者将盒B推入一半,随后让它利用重量掉落到设置部130a中。
这里,如图18-20所示,通过沿着与驱动轴180(图21)的轴线L3的方向大致垂直的方向的运动而实现盒B相对于设备主组件A的安装和拆卸,与这些操作相对应地,驱动轴180与联接件150之间的位置在接合状态和脱离状态之间改变。
这里,将对“大致垂直”进行描述。
在盒B与设备主组件A之间,为了平稳地安装和拆卸盒B,设有小间隙。更具体而言,在相对于纵向方向于引导件140R1和引导件130R1之间、相对于纵向方向于引导件140R2和引导件130R2之间、相对于纵向方向于引导件140L1和引导件130L1之间以及相对于纵向方向于引导件140L2和引导件130L2之间均设有小间隙。因此,在相对设备主组件A安装和拆卸盒B时,整个盒B能够在所述间隙的限制范围内略微倾斜。因此,“垂直”不是严格意义上的垂直。然而,即使在这种情况下,本发明也能实现其效果。因此,术语“大致垂直”覆盖盒略微倾斜的情况。
(12)联接件接合操作和驱动传递
如上所述,在盒B就要定位在设备主组件A中的预定位置之前或者与之大致同时,联接件150与驱动轴180接合。更具体地说,联接件150定位在旋转力传递角位置。这里,预定位置是设置部130a。参照图21、22和23,将描述所述联接件的接合操作。图21是显示了驱动轴的主要部分和盒的驱动侧的透视图。图22是从设备主组件的下部看时的纵向剖视图。图23是从设备主组件的下部看时的纵向剖视图。这里,接合指的是轴线L2与轴线L3相对彼此大致同轴并且可以进行驱动传递的状态。
如图22所示,盒B沿着与驱动轴180的轴线L3大致垂直的方向(箭头X4)安装至设备主组件A。或者,盒B从设备主组件A拆卸。在预接合角位置,联接件150的轴线L2(图22(a))相对于鼓轴153(图21和图22(a))的轴线L1(图22(a))事先朝着安装方向X4的下游倾斜。
为了使联接件事先朝着预接合角位置倾斜,例如使用如后面将要描述的第三至第九实施例的结构。
由于联接件150的倾斜,所以就安装方向X4而言的下游自由端150A1在轴线L1的方向上比驱动轴自由端180b3更靠近感光鼓107。另外,就安装方向而言的上游自由端150A2比驱动轴自由端180b3(图22(a)、22(b))更靠近销182。这里,自由端位置是如图8(a)和(c)所示的从动部150a的在轴线L2的方向上最靠近驱动轴的位置,并且它是距离轴线L2最远的位置。换言之,根据图8(a)和(c)中的联接件150(150A)的旋转相位,自由端位置是联接件150的从动部150a的边缘线,或者是突起150d的边缘线。
联接件150的自由端位置150A1从驱动轴自由端180b3旁边经过。在联接件150执行从驱动轴自由端180b3旁边经过的操作之后,接收面(盒侧接触部)150f或突起(盒侧接触部)150d与驱动轴(主组件侧接合部)180的自由端部180b或销(主组件侧接合部)(旋转力施加部)182接触。相应于盒B的安装操作,轴线L2倾斜,使得它可以与轴线L1(图22(c))大致对准。当联接件150从所述预接合角位置倾斜并且其轴线L2与轴线L1大致对准时,到达旋转力传递角位置。最后,相对于设备主组件A确定盒B的位置。这里,驱动轴180与鼓轴153相对彼此大致同轴。另外,接收面150f与驱动轴180的球形自由端部180b相对。该状态是联接件150与驱动轴180(图21(b)和图22(d))之间的接合状态。此时,销155(未示出)被定位在开口150g(图8(b))中。换言之,销182进入待用部分150k。这里,联接件150覆盖自由端部180b。
接收面150f构成凹部150z。凹部150z具有锥形形状。
正如上面已经描述的,联接件150可以相对于轴线L1枢转。并且相应于盒B的运动,联接件150的作为盒侧接触部的一部分(接收面150f和/或突起150d)与主组件侧接合部(驱动轴180和/或销182)接触。由此,实现联接件150的枢转运动。如图22所示,联接件150在相对于轴线L1的方向与驱动轴180交叠的状态下被安装。然而,如上所述,通过联接件的枢转运动,联接件150和驱动轴180可以以交叠状态相对于彼此接合。
不管驱动轴180与联接件150的相位如何,如上所述的联接件150的安装操作均能够执行。参照图15和图23,将进行详细描述。图23显示了联接件与驱动轴之间的相位关系。在图23(a)中,在相对于盒的安装方向X4的下游位置,销182和接收面150f彼此面对。在图23(b)中,销182和突起150d彼此面对。在图23(c)中,自由端部180b与突起150d彼此面对。在图23(d)中,自由端部180b与接收面150f彼此面对。
如图15所示,联接件150相对于鼓轴153以能够沿任何方向枢转的方式安装。更具体地说,联接件150是可回转的。因此,如图23所示,不管鼓轴153相对于盒B的安装方向X4的相位如何,联接件150均能朝着安装方向X4倾斜。另外,对联接件150的倾斜角进行设定,使得不管驱动轴180和联接件150的相位如何,自由端位置150A1在轴线L1的方向上比轴向自由端180b3更靠近感光鼓107。另外,对联接件150的倾斜角进行设定,使得自由端位置150A2比轴向自由端180b3更靠近销182。通过这种设定,相应于盒B的安装操作,自由端位置150A1沿安装方向X4从轴向自由端180b3旁边经过。在图23(a)的情况下,接收面150f接触销182。在图23(b)的情况下,突起(接合部)150d接触销(旋转力施加部)182。在图23(c)的情况下,突起150d接触自由端部180b。在图23(d)的情况下,接合面150f接触自由端部180b。另外,通过在安装盒B时产生的接触力,联接件150的轴线L2移动,使得它大致变得与轴线L1同轴。由此,联接件150与驱动轴180接合。更具体地说,联接件凹部150z覆盖自由端部180b。因此,不管驱动轴180、联接件150和鼓轴153的相位如何,联接件150均能够与驱动轴180(销182)接合。
另外,如图22所示,在鼓轴153和联接件150之间设有间隙,从而联接件是可摆动(可回转或可枢转)的。
在该实施例中,联接件150在图22的图纸平面中移动。然而,该实施例的联接件150能够如上所述地旋转。因此,联接件150的运动可包括不包含在图22的图纸平面中的运动。在这种情况下,发生从图22(a)的状态到图22(d)的状态的变化。这适用于后面将要描述的实施例,除非另外指出。
参照图24,将描述在旋转感光鼓107时的旋转力传递操作。通过从驱动源(电机186)接收的旋转力,驱动轴180沿着预定方向(图中的X8)与齿轮181一起旋转。与驱动轴180(182a1,182a2)一体的销182与旋转力接收面(旋转力接收部)150e1-150e4中的任两个面接触。更具体地说,销182a1与旋转力接收面150e1-150e4中任一面接触。另外,销182a2与旋转力接收面150e1-150e4中的任一面接触。由此,驱动轴180的旋转力被传递至联接件150以便旋转联接件150。另外,通过联接件150的旋转,联接件150的旋转力传递面(旋转力传递部)150h1或150h2与和鼓轴153一体的销155接触。由此,驱动轴180的旋转力通过联接件150、旋转力传递面150h1或150h2、销155、鼓轴153和鼓法兰151被传递至感光鼓107。以这种方式,旋转感光鼓107。
在旋转力传递角位置,自由端部153b与接收面150i接触。驱动轴180的自由端部(定位部)180b与接收面(定位部)150f接触。由此,在联接件150覆盖于驱动轴180(图22(d))之上的状态下,联接件150相对于驱动轴180被定位。
在该实施例中,即使轴线L3和轴线L1稍微偏离共轴关系,联接件150也能实施旋转力的传递,原因是联接件150能略微倾斜。即使在这种情况下,联接件150也能旋转,而不会在鼓轴153和驱动轴180上造成的大的附加载荷。因此,在装配时驱动轴180和鼓轴153的高精度的位置布置操作是容易的。因此,能够改进装配操作性。
这也是该实施例的其中一个效果。
另外,在图17中,正如已经描述的,驱动轴180和齿轮181的位置相对于直径方向和轴向方向均被定位在设备主组件A的预定位置(设置部130a)。另外,如上所述,盒B被定位在设备主组件的预定位置。定位在所述预定位置的驱动轴180和定位在所述预定位置的盒B通过联接件150相联接。联接件150相对于感光鼓107是可摆动(可枢转)的。因此,如上所述,联接件150能够在定位于预定位置的驱动轴180与定位于预定位置的盒B之间平稳地传递旋转力。换言之,即使在驱动轴180与感光鼓107之间有一些轴向偏差,联接件150也能平稳地传递旋转力。
这也是该实施例的其中一个效果。
另外,如上所述,盒B被定位在预定位置。因此,作为盒B的构成件的感光鼓107相对于设备主组件A能被正确地定位。因此,能够以高的精度保持感光鼓107、光学装置101、转印辊104或者记录材料102之间的空间关系。换言之,能够减少那些位置偏离。
联接件150与驱动轴180接触。由此,虽然已经提到联接件150从预接合角位置摆动到旋转力传递角位置,但是本发明并不限制于这个例子。例如,可以将作为主组件侧接合部的抵接部设置在除设备主组件的驱动轴之外的位置中。在盒B的安装过程中,在自由端位置150A1从驱动轴自由端180b3旁边经过之后,联接件150的一部分(盒侧接触部)与该抵接部接触。由此,联接件能够接收摇动方向(枢转方向)的力,并且也能够摆动,使得轴线L2变得与轴线L3(枢转)大致同轴。换言之,其他手段也是可以的,只要轴线L1能够与盒B的安装操作相关联地与轴线L3大致同轴定位即可。
(13)联接件的脱离操作以及盒的移除操作
参照图25,将描述在从设备主组件A中取出盒B时用于从驱动轴180上分离联接件150的操作。图25是从设备主组件下部看时的纵向剖视图。
首先,将描述在拆卸盒B时销182的位置。在完成成像操作之后,正如从前面描述中明显看出的,销182定位在待用部150k1-150k4(图8)中的任何两个待用部。销155定位在开口150g1或150g2中。
下面将描述与取出盒B的操作相关联地将联接件150从驱动轴180上脱离的操作。
如图25所示,在从设备主组件A中拆卸时,盒B被沿着与轴线L3大致垂直的方向(箭头X6的方向)抽出。
在对鼓轴153的驱动已经停止的状态下,联接件150中的轴线L2与轴线L1大致同轴(旋转力传递角位置)(图25(a))。鼓轴153与盒B一起沿着拆卸方向X6移动,联接件150的相对于拆卸方向的上游的接收面150f或突起150d至少与驱动轴180的自由端部180b接触(图25(a))。并且轴线L2开始相对于拆卸方向X6朝着上游倾斜(图25(b))。该方向与在安装盒B时联接件150的倾斜方向(预接合角位置)相同。当通过盒B从设备主组件A的拆卸操作,使得相对于拆卸方向X6的上游自由端部150A3与自由端部180b接触时,联接件150移动。更详细地,相应于盒B沿拆卸方向的运动,当联接件150的作为盒侧接触部的一部分(接收面150f和/或突起150d)与主组件侧接合部(驱动轴180和/或销182)接触时,联接件移动。自由端部150A3沿着轴线L2倾斜至自由端180b3(脱离角位置)(图25(c))。在该状态下,联接件150从驱动轴180旁边经过,与自由端180b3接触,并且从驱动轴180上脱离(图25(d))。随后,盒B按照与图20中所示安装过程相反的过程移动,并且从设备主组件A中取出。
从前面描述中显而易见,预接合角位置相对于轴线L1的角度比脱离角位置相对于轴线L1的角度更大。这是因为在接合联接件时考虑到零件的尺寸公差,优选要确保自由端位置150A1在预接合角位置从自由端部180b3旁边经过。更具体地说,在预接合角位置,联接件150与自由端部180b3之间优选存在间隙(图22(b))。相反,在联接件脱离时,轴线L2与盒的拆卸操作相关联地在脱离角位置倾斜。因此,联接件150A3沿着自由端部180b3移动。换言之,盒的在盒拆卸方向的上游部和驱动轴的自由端部位于大致相同的位置(图25(c))。因此,预接合角位置相对于轴线L1的角度比脱离角位置相对于轴线L1的角度更大。
另外,与将盒B安装至设备主组件A的情况类似,不管联接件150和销182之间的相位差如何,盒B均能够被取出。
如图22所示,在联接件150的旋转力传递角位置,联接件150相对于轴线L1的角度是这样的,即:在盒B被安装至设备主组件A的状态下,联接件150从驱动轴180接收旋转力的传递,并且旋转。
在联接件150的旋转力传递角位置,用于旋转感光鼓的旋转力被传递至鼓。
另外,在联接件150的预接合角位置,联接件150相对于轴线L1的角位置是这样的,即:处于在盒B安装至设备主组件A的安装操作中刚好就在联接件150要与驱动轴180接合之前的状态。更具体地说,相对于轴线L1的角位置使得:联接件150相对于盒B安装方向的下游自由端150A1能够从驱动轴180旁边经过。
另外,联接件150的脱离角位置是在从设备主组件A中取出盒B时、在联接件150与驱动轴180脱离的情况下联接件150相对于轴线L1的角位置。更具体地说,如图25所示,它是相对于轴线L1的如下角位置:借助该角位置,联接件150的自由端部150A3能够相对于盒B的移除方向从驱动轴180旁边经过。
在所述预接合角位置或者脱离角位置,轴线L2与轴线L1之间的角度θ2比在旋转力传递角位置轴线L2与轴线L1之间的角度θ1更大。至于角度θ1,0度是优选的。然而,在该实施例中,如果角度θ1小于大约15度,则实现旋转力的平稳传递。这也是该实施例的其中一个效果。至于角度θ2,大约20-60度的范围是优选的。
正如之前已经描述的,联接件被可枢转地安装至轴线L1。处于在轴线L1的方向上与驱动轴180交叠的状态下的联接件150能够从驱动轴180上脱离,原因是联接件能相应于盒B的拆卸操作倾斜。更具体地说,通过沿着与驱动轴180的轴向方向大致垂直的方向移动盒B,能够从驱动轴180上脱离覆盖驱动轴180的联接件150。
在上面的描述中,联接件150的接收面150f或者突起150d与盒B沿拆卸方向X6的运动相关联地与自由端部180b(销182)接触。由此,描述了轴线L1开始向拆卸方向上游倾斜。然而,本发明并不限制于这个例子。例如,联接件150事先具有这样的结构,使得它被压向拆卸方向的上游。并且,相应于盒B的所述运动,该压迫力使轴线L1开始向着拆卸方向的下游倾斜。这样,自由端150A3从自由端180b3旁边经过,并且联接件150从驱动轴180上脱离。换言之,在相对于拆卸方向的上游侧的接收面150f或者突起150d不与自由端部180b接触,并且因此它能够被从驱动轴180上脱离。因此,如果轴线L1能够与盒B的拆卸操作相关联地倾斜,则可以应用任何结构。
在联接件150就要被安装至驱动轴180的时间点之前,联接件150的从动部是倾斜的,使得它朝着相对于安装方向的下游倾斜。换言之,联接件150被事先设置在预接合角位置的状态下。
在前文中,已经描述了在图25的图纸平面中的运动,但是该运动可以包括如图22所示情形中的回转运动。
至于其结构,可以使用将在第二实施例及后面实施例中描述的结构。
参照图26和图27,将描述鼓轴的其它实施例。图26是鼓轴的附近的透视图。图27显示了特征部分。
在上述实施例中,鼓轴153的自由端被形成为球形面,并且联接件150与该球形面接触。然而,如图26(a)和27(a)所示,鼓轴1153的自由端1153b可以是平坦面。在该实施例的情况下,鼓轴1153的外围面的边缘部1153c与联接件150的锥形面接触,由此传递旋转。即使具有这种结构,轴线L2也能相对轴线L1确定地倾斜。在该实施例的情况下,没有必要进行球形面机加工。因此,能够降低机加工成本。
在上述实施例中,另一旋转力传递销被安装至鼓轴。然而,如图26(b)和27(b)所示,可以将鼓轴1253和销1253c整体成型。在应用注射成型等进行整体成型的情况下,几何纬度变得很高。在这种情况下,销1253c能够与鼓轴1253整体形成。因此,能够提供宽范围的驱动传递部1253d。因此,可以确保运行扭矩能够传递至由树脂材料制成的鼓轴。另外,由于应用了整体成型,所以降低了制造成本。
如图26(c)和27(c)所示,旋转力传递销(旋转力接收件)1355的相对端1355a1、1355a2通过压入配合等被事先固定至联接件1350的待用开口1350g1或1350g2。随后,可以插入鼓轴1353,所述鼓轴1353具有形成为螺纹槽形状(凹部)的自由端部1353c1、1353c2。此时,为了提供联接件1350的可枢转性,销1355相对于鼓轴1353的自由端部(未示出)的接合部1355b被形成为球形形状。因此,销1355(旋转力施加部)被事先固定。由此,能够降低联接件1350的开口1350g的尺寸。因此,能够提高联接件1350的刚性。
在前文中,已经描述了使轴线L1沿着鼓轴自由端倾斜的结构。然而,如图26(d)、26(e)和27(d)所示,可以沿着鼓轴1453的轴线上的接触件1457的接触面1457a倾斜。在这种情况下,鼓轴1453的自由端面1453b具有与接触件1457的端面相当的高度。另外,突出到自由端面1453b之外的旋转力传递销(旋转力接收件)1453c被插入联接件1450的待用开口1450g中。销1453c与联接件1450的旋转力传递面(旋转力传递部)1450h接触。由此,旋转力被传递至鼓107。以这种方式,在接触件1457中提供联接件1450倾斜时的接触面1457a。由此,没有必要直接加工鼓轴。因此,能够降低机加工成本。
另外,类似地,自由端的球形面可以是为单独件的成型树脂零件。在这种情况下,能够降低轴的机加工成本。这是由于能够简化将要通过切削等加工的轴的构造。另外,当减小轴向自由端的球形面的范围时,需要高精度加工的范围可以很少。由此,能够降低机加工成本。
参照图28,将就驱动轴的另一实施例进行描述。图28是驱动轴和鼓驱动齿轮的透视图。
首先,如图28(a)所示,使驱动轴1180的自由端进入平坦面1180b中。由此,由于轴的构造是简单的,所以能够降低机加工成本。
另外,如图28(b)所示,可以与驱动轴1280一起整体地成型旋转力施加部(驱动传递部)1280(1280c1,1280c2)。当驱动轴1280是成型树脂件时,能够整体地成型旋转力施加部。因此,能够实现成本降低。附图标记1280b表示的是平坦面部。
另外,如图28(c)所示,减小了驱动轴1380的自由端部1380b的范围。因此,可以使轴自由端1380c的外径小于主部1380a的外径。如上所述,自由端部1380b需要特定的精确值,以便确定联接件150的位置。因此,球形范围仅仅被限制在联接件的接触部。由此,需要精加工精度的表面之外的部分不需要精加工。由此,降低了机加工成本。另外,类似地,可以切掉不必要的球形面的自由端。由附图标记1382表示的是销(旋转力施加部)。
下面描述将感光鼓107相对于轴线L1的方向定位的方法。换言之,联接件1550设有锥形面(倾斜平面)1550e、1550h。通过驱动轴181的旋转产生沿推进方向的力。通过所述推进力实现联接件1550和感光鼓107相对于轴线L1的方向的定位。参照图29和图30,将对此进行详细地描述。图29是联接件独自的透视图和俯视图。图30是显示了驱动轴、鼓轴和联接件的分解透视图。
如图29(b)所示,旋转力接收面1550e(倾斜平面)(旋转力接收部)相对于轴线L2倾斜角度α5。当驱动轴180沿方向T1旋转时,销182与旋转力接收面1550e彼此接触。然后,沿方向T2向联接件1550施加分力,并且联接件1550沿方向T2移动。联接件1550沿轴向方向移动直至驱动轴接收面1550f(图30a)抵接驱动轴180的自由端180b。由此,联接件1550相对于轴线L2方向的位置被确定。另外,驱动轴180的自由端180b形成为球形面,并且接收面1550f具有圆锥面。因此,相对于与轴线L2垂直的方向,从动部1550a相对于驱动轴180的位置被确定。在联接件1550安装至鼓107的情况下,根据沿方向T2所增加的力的大小,鼓107也沿轴向方向移动。在这种情况下,相对于纵向方向,鼓107相对于设备主组件的位置被确定。鼓107沿纵向方向有游隙地安装在盒框架B1中。
如图29(c)所示,旋转力传递面(旋转力传递部)1550h相对于轴线L2倾斜角度α6。当联接件1550沿方向T1旋转时,传递面1550h和销155相对彼此抵靠。然后,沿方向T2向销155施加分力,并且销155沿方向T2移动。鼓轴153移动直至鼓轴153的自由端153b与联接件1550的鼓支承面1550i(图30(b))接触。由此,鼓轴155(感光鼓)相对于轴线L2方向的位置被确定。另外,鼓支承面1550i具有圆锥面,并且鼓轴153的自由端153b形成为球形面。因此,相对于与轴线L2垂直的方向,驱动部1550b相对于鼓轴153的位置被确定。
锥形角α5和α6被设置为这样的度数:通过所述度数能产生沿推进方向有效移动联接件和感光鼓的力。然而,根据感光鼓107的运行扭矩,所述力有所不同。然而,如果设有能有效确定沿推进方向的位置的装置,则锥形角α5和α6可以是小的。
正如之前已经描述的,在联接件中设有用于沿轴线L2的方向被拉动的锥形以及用于确定在轴线L2上相对于正交方向的位置的圆锥面。由此,联接件相对于轴线L1的方向的位置以及相对于与轴线L1垂直的方向的位置被同时确定。另外,联接件能够确定地传递旋转力。而且,与上述联接件的旋转力接收面(旋转力接收部)或者旋转力传递面(旋转力传递部)不具有锥形角的情况相比,能够稳定驱动轴的旋转力施加部与联接件的旋转力接收部之间的接触。另外,能够稳定鼓轴的旋转力接收部与联接件的旋转力传递部之间的接触抵接。
然而,可以省略联接件中用于沿轴线L2的方向拉动的锥形面(倾斜平面)以及用于确定轴线L2相对于正交方向位置的圆锥面。例如,代替用于沿轴线L2的方向拉动的锥形面,可以添加用于沿轴线L2的方向压迫鼓的零件。后面,只要没有特别提出,就设有锥形面和圆锥面。另外,在上述联接件150中也设有锥形面和圆锥面。
参照图31,将描述用于调节联接件相对于盒的倾斜方向的调节装置。图31(a)是显示了处理盒的驱动侧主要零件的侧视图,并且图31(b)是沿着图31(a)的S7-S7截取的剖视图。
在该实施例中,通过提供调节装置,联接件150和设备主组件的驱动轴180能够更加确定地接合。
在该实施例中,调节部1557h1或1557h2作为调节装置被设置在鼓支承件1557上。通过所述调节装置,联接件150相对于盒B的摆动方向能够进行调节。所述结构是这样的,即在联接件150刚好要与驱动轴180接合之前,所述调节部1557h1或1557h2平行于盒B的安装方向X4。另外,间隔D6略微大于联接件150的驱动部150b的外径D7。通过这样做,联接件150仅能枢转至盒B的安装方向X4。另外,联接件150能够相对于鼓轴153沿任何方向倾斜。因此,无论鼓轴153的相位如何,联接件150均能够沿被调节方向倾斜。因此,联接件150的开口150m能够更确定地接纳驱动轴180。由此,联接件150可以更确定地与驱动轴180接合。
参照图32,将描述用于调节联接件的倾斜方向的另一结构。图32(a)是显示设备主组件驱动侧的内侧的透视图,图32(b)是从安装方向X4的上游看时盒的侧视图。
在上述描述中,调节部1557h1或1557h2被设置在盒B中。在该实施例中,设备主组件A的驱动侧的安装引导件1630R1的一部分是肋状调节部1630R1a。调节部1630R1a是用于调节联接件150的摆动方向的调节装置。并且所述结构是这样的,即当使用者插入盒B时,联接件150的连接部150c的外围与调节部1630R1a的上表面1630R1a-1接触。由此,联接件150由上表面1630R1a-1引导。因此,调节了联接件150的倾斜方向。另外,类似于上述实施例,无论鼓轴153的相位如何,联接件150均沿着它被调节的方向倾斜。
在图32(a)所示的例子中,调节部1630R1a设置在联接件150的下方。然而,类似于图31所示的调节部1557h2,当上侧也添加调节部时能够实现更确定的调节。
如上所述,它可以与其中调节部被设置在盒B中的结构相结合。在这种情况下,能够实现更确定的调节。
然而,在该实施例中,例如通过使联接件150事先相对于盒B的安装方向向下游倾斜,可以省略用于调节联接件倾斜方向的装置。联接件的驱动轴接收面150f被扩大。由此,能够建立驱动轴180与联接件150之间的接合。
另外,在前面的描述中,联接件150在预接合角位置相对于鼓轴线L1的角度比在脱离角位置中(图22和25)的角度更大。然而,本发明并不限制于这样的例子。
下面将参照图33进行描述。图33是显示了用于从设备主组件A中取出盒B的过程的纵向剖视图。
在用于从设备主组件A取出盒B的过程中,联接件1750在脱离角位置(在图33c的状态下)相对于轴线L1的角度可以与联接件1750接合时联接件1750在预接合角位置相对于轴线L1的角度相同。这里,联接件1750脱离的过程在图33中由(a)-(b)-(c)-(d)示出。
更具体地说,设置如下:即当联接件1750的相对于拆卸方向X6的上游自由端部1750A3从驱动轴180的自由端部180b3旁边经过时,自由端部1750A3与自由端部180b3之间的距离与在预接合角位置时的这一距离是相当的。通过这种设置,联接件1750能够与驱动轴180脱离。
在拆卸盒B时的其它操作与上面描述的操作相同,并且因此不再描述。
另外,在前面的描述中,在将盒B安装至设备主组件A时,联接件的相对于安装方向的下游自由端比驱动轴180的自由端更靠近鼓轴。然而,本发明并不限制于这个例子。
下面将参照图34进行描述。图34是用于显示盒B的安装过程的纵向剖视图。如图34所示,在盒B的安装过程的(a)的状态中,在轴线L1的方向上,相对于安装方向X4的下游自由端位置1850A1比驱动轴自由端180b3更靠近销182(旋转力施加部)。在(b)的状态中,自由端位置1850A1与自由端部180b接触。此时,自由端位置1850A1沿着自由端部180b朝着鼓轴153移动。并且,在该位置,自由端位置1850A1从驱动轴180的自由端部180b3旁边经过,联接件150进入预接合角位置(图34(c))。最终建立联接件1850与驱动轴180之间的接合((旋转力传递角位置)图34(d))。
将描述该实施例的一个例子。
首先,鼓轴153的轴径是φZ1,销155的轴径是φZ2,并且长度是Z3(图7(a))。联接件150的从动部150a的最大外径是φZ4,并且经过突起150d1或150d2或150d3、150d4的内端的假想圆C1的直径是φZ5,并且驱动部150b的最大外径是φZ6(图8(d)(f))。形成在联接件150与接收面150f之间的角度是α2,并且形成在联接件150与接收面150i之间的角度是α1。驱动轴的轴径是φZ7,销182的轴径是φZ8,并且长度是Z9(图17(b))。另外,在旋转力传递角位置中相对于轴线L1的角度是β1,在预接合角位置中的角度是β2,并且在脱离角位置中的角度是β3。在该例子中,Z1=8mm;Z2=2mm;Z3=12mm;Z4=15mm;Z5=10mm;Z6=19mm;Z7=8mm;Z8=2mm;Z9=14mm;α1=70°;α2=120°;β1=0°;β2=35°;β3=30°。
已经证实,借助这些设置,联接件150与驱动轴180之间的接合是可以的。然而,这些设置不限制本发明。另外,联接件150能够以高精度将旋转力传递至鼓107。上面给出的数值是例子,本发明并不限制于这些数值。
另外,在该实施例中,销(旋转力施加部)182设置在距离驱动轴180的自由端5mm的范围内。另外,设于突起150d中的旋转力接收面(旋转力接收部)150e被设置在距离联接件150的自由端4mm的范围内。以这种方式,销182被设置在驱动轴180的自由端侧。另外,旋转力接收面150e被设置在联接件150的自由端侧。
由此,在将盒B安装至设备主组件A时,驱动轴180与联接件150能够相对彼此平稳地接合。更详细地说,销182与旋转力接收面150e能够彼此平稳地接合。
另外,在将盒B从设备主组件A拆卸时,驱动轴180与联接件150能够相对彼此平稳地脱离。更具体地说,销182与旋转力接收面150e能够相对彼此平稳地脱离。
这些数值只是例子,本发明并不限制于这些数值。然而,通过被设置在这些数值范围中的销(旋转力施加部)182和旋转力接收面150e,能进一步提高上述效果。
如前所述,在所描述的实施例中,联接件150能够进入旋转力传递角位置,所述旋转力传递角位置用于将用于旋转电子照相感光鼓的旋转力传递至电子照相感光鼓;并且能够从旋转力传递角位置进入脱离角位置,在所述脱离角位置,联接件150远离电子照相感光鼓的轴线倾斜。当沿着与电子照相感光鼓的轴线大致垂直的方向从电子照相成像设备的主组件拆卸处理盒时,联接件从旋转力传递角位置移至脱离角位置。当沿着与电子照相感光鼓的轴线大致垂直的方向将处理盒安装至电子照相成像设备的主组件时,联接件从脱离角位置移至旋转力传递角位置。这适用于以下实施例,不过以下第二实施例仅与拆卸相关。
[第二实施例]
参照图35-图40,将描述应用本发明的第二实施例。
在该实施例的描述中,该实施例中与第一实施例相同的附图标记被指定给具有相应功能的元件,并且为简单起见省略对其详细描述。这也适用于下面描述的其它实施例。
该实施例不仅对于相对于设备主组件A安装和拆卸盒B的情况有效,而且对仅仅从设备主组件A拆卸盒B的情况也有效。
更具体地说,当驱动轴180停止时,通过控制设备主组件A,驱动轴180以预定相位停止。换言之,它停止成使得销182可以处在预定位置。而且,联接件14150(150)的相位被设置得与已停止的驱动轴180的相位对齐。例如,待用部分14150k(150k)的位置被设置成可以与销182的停止位置对准;利用这种设置,在将盒B安装至设备主组件A时,即使联接件14150(150)不枢转,它也会处于与驱动轴180相对的状态。通过旋转驱动轴180,来自驱动轴180的旋转力被传递至联接件14150(150)。由此,联接件14150(150)能够以高精度旋转。
然而,在通过沿着与轴线L3的方向大致垂直的方向移动而将盒B从设备主组件A上拆除时,该实施例也在起作用。这是因为即使驱动轴180以预定相位停止,销182和旋转力接收面14150e1、14150e2(150e)也相对彼此接合。因此,为了从驱动轴180上脱离联接件14150(150),联接件14150(150)需要枢转。
另外,在上述第一实施例中,在将盒B安装至设备主组件A以及在拆卸它时,联接件14150(150)枢转。因此,上述对设备主组件A的控制是不必要的;在将盒B安装至设备主组件A时,没有必要事先按照已停止的驱动轴180的相位设置联接件14150(150)的相位。
将参照附图进行描述。
图35是透视图,其显示了用于驱动轴的相位控制装置、驱动齿轮以及设备主组件的驱动轴。图36是联接件的透视图和俯视图。图37是显示了盒的安装操作的透视图。图38是在盒安装时从安装方向看时的俯视图,图39是显示了在盒(感光鼓)的驱动停止状态的透视图。图40是显示了用于取出盒的操作的透视图。
在该实施例中,将就能够以可拆卸方式安装至设备主组件A的盒进行描述,所述设备主组件A设有能够控制销182的停止位置的相位的控制装置(未显示)。驱动轴180的一个端侧(未显示的感光鼓107侧)与第一实施例中的相同,如图35(a)所示,因此省略描述。另一方面,如图35(b)所示,另一端侧(所述未显示的感光鼓107侧的相对侧)设有从驱动轴180的外围突出的遮光器14195。遮光器14195通过其旋转而经过固定至设备主组件A的光电断路器14196。控制装置(未显示)实施控制,使得在驱动轴180旋转(例如成像旋转)之后,当遮光器14195开始中断光电断路器14196时,电机186停止。由此,销182相对于驱动轴180的旋转轴线停止在预定位置。至于电机186,在该实施例的情况下,期望它是步进电机,由此定位控制变得容易。
参照图36,将描述用在该实施例中的联接件。
联接件14150主要包括三个部分。如图36(c)所示,它们是:用于从驱动轴180接收旋转力的从动部14150a、用于将旋转力传递至驱动轴153的驱动部14150b以及将从动部14150a与驱动部14150b彼此连接的连接部14150c。
从动部14150a具有驱动轴插入部14150m,其由沿着远离轴线L2的方向扩张的两个表面构成。另外,驱动部14150b具有鼓轴插入部14150v,其由远离轴线L2扩张的两个表面构成。
所述插入部14150m具有锥形驱动轴接收面14150f1或14150f2。每个端面设有突起14150d1或14150d2。突起14150d1或14150d2围绕联接件14150的轴线L2设置在圆周上。所述接收面14150f1、14150f2构成凹部14150z,如附图所示。另外,如图36(d)所示,突起14150d1、14150d2的顺时针方向的下游设有旋转力接收面(旋转力接收部)14150e(14150e1、14150e2)。销(旋转力施加部)182抵靠所述接收面14150e1、14150e2。由此,旋转力被传递至联接件14150。相邻突起14150d1-d2之间的间隔(W)大于销182的外径,以便允许销182的进入。所述间隔是待用部分14150k。
另外,所述插入部14150v由两个表面14150i1、14150i2构成。在所述表面14150i1、14150i2中设有待用开口14150g1或14150g2(图36a、图36e)。另外,在图36(e)中,在开口14150g1或14150g2的相对于顺时针方向的上游,设置旋转力传递面(旋转力传递部)14150h(14150h1或14150h2)。如上所述,销(旋转力接收部)155a与旋转力传递面14150h1或14150h2接触。由此,旋转力从联接件14150传递至感光鼓107。
通过联接件1415的形状,在盒被安装至设备主组件的状态下,联接件覆盖驱动轴的自由端。
通过与第一实施例所描述的结构类似的结构,联接件14150相对于鼓轴153能够沿任何方向倾斜。
参照图37和图38,将描述联接件的安装操作。图37(a)是显示在安装联接件之前的状态的透视图。图37(b)是显示了联接件被接合的状态的透视图。图38(a)是从安装方向看时的俯视图。图38(b)是相对于安装方向从顶部看时的俯视图。
通过上述控制装置,销(旋转力施加部)182的轴线L3平行于所述安装方向X4。另外,至于盒,相位对准使得接收面14150f1和14150f2沿垂直于方向X4(图37(a))的方向彼此相对。例如,如图所示,接收面14150f1或14150f2的任何一侧可作为用于对准相位的结构与设置在支承件14157上的标记14157z对准。这在从工厂运输盒之前进行。然而,使用者可以在将盒B安装至设备主组件之前进行。另外,可以使用其它相位调节装置。通过这样做,如图38(a)所示,联接件14150和驱动轴180(销182)就安装方向而言在位置关系上不会互相干涉。因此,联接件14150和驱动轴180可以没有问题地接合(图37(b))。驱动轴180沿方向X8旋转,从而销182与接收面14150e1、14150e2接触。由此,旋转力被传递至感光鼓107。
参照图39和图40,将描述联接件14150与将盒B从设备主组件A中取出的操作相关联地从驱动轴180上脱离的操作。销182相对于驱动轴180的相位通过控制装置停止在预定位置。如上所述,当考虑安装盒B的方便性时,期望销182以平行于盒拆卸方向X6(图39b)的相位停止。在图40中显示了在取出盒B时的操作。在该状态(图40(a1)和(b1))下,联接件14150进入旋转力传递角位置并且轴线L2和轴线L1彼此大致同轴。此时,类似于安装盒B的情况,联接件14150相对于鼓轴153能够沿任何方向倾斜(图40a1、图40b1)。因此,与盒B的拆卸操作相关联地,轴线L2相对于轴线L1沿着与拆卸方向相反的方向倾斜。更具体地说,盒B沿着大致垂直于轴线L3的方向(箭头X6的方向)被拆卸。在盒的拆卸过程中,轴线L2倾斜直至联接件14150的自由端14150A3变得沿着驱动轴180的自由端180b(脱离角位置)。或者,轴线L2倾斜至轴线L2相对于自由端部180b3到达鼓轴153侧(图40(a2),图40(b2))。在这种状态下,联接件14150在自由端部180b3附近通过。通过这样做,联接件14150从驱动轴180上被拆卸。
另外,如图39(a)所示,销182的轴线可能停止在与盒拆卸方向X6垂直的状态下。通过控制装置的控制,销182通常停止在图39(b)所示的位置。然而,成像设备(打印机)的电源可能断电并且控制装置可能不工作。在这种情况下,销182可能停止在图39(a)所示的位置。然而,即使在这种情况下,轴线L2也类似于上述情况相对于轴线L1倾斜,并且也可以进行移除操作。当成像设备处于驱动停止的状态下时,销182在拆卸方向X6上越过突起14150d2位于下游。因此,通过轴线L2倾斜,联接件的突起14150d1的自由端14150A3经过鼓轴153侧并越过销182。由此,联接件14150从驱动轴180上被拆卸。
正如之前已经描述的,即使在安装盒B时联接件14150是通过特定方法相对于驱动轴180被接合的情况下,轴线L2在拆卸操作的情况下也相对于轴线L1倾斜。由此,仅仅通过这种拆卸操作,联接件14150能够从驱动轴180被拆卸。
正如之前已经描述的,根据第二实施例,除了相对于设备主组件A安装和拆卸盒B的情况之外,该实施例甚至对于从设备主组件拆卸盒的情况也是有效的。
[第三实施例]
参照图41-图45,将描述第三实施例。
图41是显示了设备主组件A的门打开的状态的剖视图。图42是显示安装引导件的透视图。图43是盒的驱动侧表面的放大视图。图44是从驱动侧看时盒的透视图。图45是显示了将盒插入设备主组件中的状态的视图。
在该实施例中,例如,如同在蛤壳式成像设备的情况,盒被向下安装。在图41中显示了典型的蛤壳式成像设备。设备主组件A2包括下壳D2和上壳E2。上壳E2设有门2109和门2109的内部曝光装置2101。因此,当上壳E2向上打开时,曝光装置2101回缩。并且盒设置部2130a的上部被打开。当使用者将盒B2安装至设置部2130a时,使用者使盒B2沿着X4B下落。通过这些操作完成安装,因此盒的安装是容易的。另外,能够从定影装置105的上部实施邻近定影装置105的卡纸清除操作。因此,它在卡纸清除的方便性方面是卓越的。这里,卡纸清除是用于移除在进给过程中被卡住的记录材料102的操作。
更具体地说,将描述用于盒B2的设置部。如图42所示,成像设备A2在驱动侧设有安装引导件2130R并且在与驱动侧相对的非驱动侧设有未示出的安装引导件,以作为安装装置2130。设置部2130a被形成为由相对的引导件围绕的空间。旋转力从设备主组件A传递至设置在该设置部2130a处的盒B2的联接件150。
安装引导件2130R设有大致沿垂直方向延伸的槽2130b。另外,用于确定盒B2在预定位置的抵接部2130Ra被设置在其最低部。另外,驱动轴180从槽2130b突出。在盒B2定位于预定位置的状态下,驱动轴180将旋转力从设备主组件A传递至联接件150。另外,为了确定地将盒B2定位在预定位置,在安装引导件2130R的下部设置有压迫弹簧2188R。通过上述结构,盒B2被定位在设置部2130a中。
如图43和图44所示,盒B2设有盒侧安装引导件2140R1和2140R2。在安装时通过所述引导件来稳定盒B2的方位。安装引导件2140R1被整体地形成在鼓支承件2157上。另外,安装引导件2140R2被大致设置在安装引导件2140R1上方。引导件2140R2被设置在第二框架2118中,并且它为肋的形状。
盒B2的安装引导件2140R1、2140R2和设备主组件A2的安装引导件2130R具有上述结构。更具体地说,它与结合图2和3描述的引导件的结构相同。另外,另一端的引导件的结构也是相同的。因此,盒B2在沿着大致垂直于驱动轴180的轴线L3的方向移动至设备主组件A2的同时被安装,并且它类似地从设备主组件A2上拆除。
如图45所示,在安装盒B2时,上壳E2围绕轴2109a顺时针转动,并且使用者将盒B2拿到下壳D2的上部。此时,在图43中联接件150由于重量向下倾斜。换言之,联接件的轴线L2相对于鼓轴线L1倾斜,使得联接件150的从动部150a可能向下朝着预接合角位置。
另外,正如已经结合第一实施例、图9和图12所描述的,在图43中期望提供半圆形保持肋2157e。在该实施例中,盒B2的安装方向向下。因此,肋2157e设置在下部。由此,正如已经结合第一实施例所描述的,轴线L1和轴线L2可以相对于彼此枢转,并且实现联接件150的保持。保持肋防止联接件150与盒B2分离。当联接件150被安装至感光鼓107时,防止它与感光鼓107k分离。
在这种状态下,正如在图45中显示的,使用者向下降低盒B2,从而将盒B2的安装引导件2140R1、2140R2与设备主组件A2的安装引导件2130R对准。盒B2能够仅通过该操作就安装至设备主组件A2的设置部2130a。在该安装过程中,类似于第一实施例以及图22,联接件150能够与设备主组件的驱动轴180接合(在该状态下联接件进入旋转力传递角位置)。更具体地说,通过沿着与驱动轴180的轴线L3的方向大致垂直的方向移动盒B2,联接件150与驱动轴180接合。另外,在拆卸盒时,与第一实施例类似,联接件150能够仅通过拆卸盒的操作而从驱动轴180上脱离(联接件从旋转力传递角位置移至脱离角位置,图25)。更具体地说,通过沿着与驱动轴180的轴线L3的方向大致垂直的方向移动盒B2,联接件150从驱动轴180上脱离。
正如之前已经描述的,由于当将盒向下安装至设备主组件时联接件通过重量向下倾斜,所以它能够确定地与设备主组件的驱动轴接合。
在该实施例中,已经描述了蛤壳式成像设备。然而,本发明并不限制于这个例子。例如,只要盒的安装方向向下,本实施例就能够被应用。另外,其安装路径不被限制于直线向下。例如,它可以在盒的初始安装阶段中向下倾斜,并且它可以最后变得向下。只要在即将到达预定位置(盒设置位置)之前安装路径是向下的,则本发明就是有效的。
[第四实施例]
参照图46-图49,将描述本发明的第四实施例。
在该实施例中,将描述相对于轴线L1将轴线L2保持在倾斜状态的装置。
在图中只显示了与本实施例的该部分的描述相关的构件,并且省略了其它构件。在下面将要描述的的其它实施例中也是如此。
图46是显示了粘贴在鼓支承件上的联接件锁定件(这对于本实施例而言是独特的)的透视图。图47是显示了鼓支承件、联接件和鼓轴的分解透视图。图48是盒的驱动侧的主要部件的放大透视图。图49是显示了驱动轴与联接件之间的接合状态的透视图和纵向剖视图。
正如在图46中所显示的,鼓支承件3157具有围绕联接件的一部分的空间3157b。作为用于保持联接件3150的倾斜状态的保持件的联接件锁定件3159被粘贴在构成所述空间的圆柱面3157i上。正如后面将要描述的,所述锁定件3159是用于临时保持轴线L2相对于轴线L1倾斜状态的构件。换言之,如图48所示,联接件3150的凸缘部3150j与所述锁定件3159接触。由此,轴线L2保持相对于轴线L1朝着盒的安装方向(X4)的下游倾斜(图49(a1))。因此,如图46所示,锁定件3159设置在支承件3157的相对于安装方向X4的上游圆柱面3157i上。作为锁定件3159的材料,诸如橡胶和弹性体等具有较高摩擦系数的材料或者诸如海绵和板簧等弹性材料是适用的。这是因为轴线L2的倾斜能够通过摩擦力、弹性力等得以保持。另外,类似于第一实施例(在图31中显示),支承件3157设有倾斜方向调节肋3157h。通过所述肋3157h能够确实地确定所述联接件3150的倾斜方向。另外,凸缘部3150j和锁定件3159能够更加确定地相对于彼此接触。参照图47,将描述联接件3150的装配方法。如图47所示,销(旋转力接收部)155进入联接件3150的待用空间3150g。另外,联接件3150的一部分被插入到鼓支承件3157所具有的空间部3157b中。此时,优选地,对肋3157e的内表面端与锁定件3159之间的距离D12进行设置,使得它比从动部3150a的最大外径φD10大。另外,设置距离D12,使得它比驱动部3150b的最大外径φD11小。由此,能够沿笔直路径装配支承件3157。因此,改进了装配性能。然而,本实施例并不限制于这种关系。
参照图49,将描述用于将联接件3150与驱动轴180接合的接合操作(盒的安装操作的一部分)。图49(a1)和(b1)显示了就要接合之前的状态,图49(a2)和(b2)显示了完成接合的状态。
如图49(a1)和49(b1)所示,通过锁定件3159的力,联接件3150的轴线L2事先相对于轴线L1朝着安装方向X4的下游倾斜(预接合角位置)。通过联接件3150沿轴线L1的方向的所述倾斜,(相对于安装方向)下游自由端部3150A1比驱动轴自由端180b3更接近感光鼓107方向侧。(相对于安装方向)上游自由端部3150A2比驱动轴180的自由端180b3更接近销182。另外,此时,正如前面已经描述的,凸缘部3150j与锁定件3159接触。并且轴线L2的倾斜状态通过其摩擦力保持。
后面,盒B沿安装方向X4移动。由此,销182的自由端表面180b或自由端与联接件3150的驱动轴接收面3150f接触。轴线L2通过其接触力(盒的安装力)而接近与轴线L1平行的方向。此时,凸缘部3150j与锁定件3159分离并且进入非接触状态。最后,轴线L1和轴线L2大致彼此同轴。并且联接件3150处于用于传递旋转力的等候(待用)状态(图49(a2)(b2))(旋转力传递角位置)。
类似于第一实施例,旋转力从电机186通过驱动轴180传递至联接件3150、销(旋转力接收部)155、鼓轴153以及感光鼓107。在旋转时轴线L2与轴线L1大致同轴。因此,锁定件3159不与联接件3150接触。因此,锁定件3159不影响联接件3150的旋转。
另外,在从设备主组件A中取出盒B的过程中,所述操作遵循类似于第一实施例的步骤(图25)。换言之,驱动轴180的自由端部180b推压联接件3150的驱动轴接收面3150f。由此,轴线L2相对于轴线L1倾斜,并且凸缘部3150j变为与锁定件3159接触。由此,联接件3150的所述倾斜状态被再次保持。换言之,联接件3150从旋转力传递角位置移至预接合角位置。
正如前面已经描述的,轴线L2的倾斜状态通过锁定件3159(保持件)被保持。由此,联接件3150能够更加确定地与驱动轴180对准。
在该实施例中,锁定件3159被粘贴在支承件3157的内表面3157i的相对于盒安装方向X4的最上游部上。然而,本发明并不限制于这个例子。例如,当轴线L2倾斜时,可以使用能够保持所述倾斜状态的任何位置。
另外,在该实施例中,锁定件3159与设置在驱动部3150b侧中的凸缘部3150j接触(图49(b1))。然而,所述接触位置可以是从动部3150a。
另外,用于该实施例中的锁定件3159是支承件3157中的单独构件。然而,本发明并不限制于该例子。例如,锁定件3159可以与支承件3157整体成型(例如,双色成型)。或者,代替锁定件3159,支承件3157可以直接与联接件3150接触。或者,其表面可以被粗糙化以便增加摩擦系数。
另外,在该实施例中,锁定件3159被粘贴在支承件3157上。然而,如果锁定件3159是固定至盒B的构件,则它可以被粘贴在任何位置。
[第五实施例]
参照图50-图53,将描述本发明的第五实施例。
在本实施例中,将描述用于保持轴线L2相对于轴线L1倾斜状态的另一方式。
图50是安装至鼓支承件的联接件压迫件(它是本实施例特有的)的分解透视图。图51是显示了鼓支承件、联接件和鼓轴的分解透视图。图52是盒的驱动侧的主要部件的放大透视图。图53是显示了驱动轴和联接件之间的接合状态的透视图和纵向剖视图。
如图50所示,在鼓支承件4157的保持肋4157e中设置保持孔4157j。作为用于保持联接件4150倾斜状态的保持件的联接件压迫件4159a、4159b被安装在保持孔4157j中。压迫件4159a、4159b压迫联接件4150,使得轴线L2相对于轴线L1朝着盒B2的安装方向的下游倾斜。每个压迫件4159a、4159b是压缩卷簧(弹性材料)。如图51所示,压迫件4159a、4159b朝着轴线L1(图51中箭头X13)压迫联接件4150的凸缘部4150j。压迫件与凸缘部4150j相接触的接触位置是鼓轴153的中心的相对于盒安装方向X4的下游。因此,至于轴线L2,通过压迫件4159a、4159b(图52)的弹性力,从动部4150a侧相对于轴线L1朝着盒的安装方向(X4)的下游倾斜。
另外,如图50所示,作为卷簧的每个压迫件4159a、4159b的联接件侧自由端设有接触件4160a、4160b。所述接触件4160a、4160b与凸缘部4150j接触。因此,接触件4160a、4160b的材料优选是高可滑动性的材料。另外,通过使用这种材料,正如后面将要描述的,在旋转力传递时,减轻了压迫件4159a、4159b的压迫力对联接件4150的旋转的影响。然而,如果载荷相对于旋转足够小,并且联接件4150能令人满意地旋转,则接触件4160a、4160b并非是不可或缺的。
在本实施例中,设置两个压迫件。然而,压迫件的数目可以是任意的,只要轴线L2能够相对于轴线L1朝着盒的安装方向的下游倾斜。例如,在单个压迫件的情况下,压迫位置期望是盒的相对于安装方向X4的最下游位置。由此,联接件4150能够稳定地朝着安装方向的下游倾斜。
另外,压迫件在本实施例中是压缩卷簧。然而,只要能够用板簧、扭簧、橡胶、海绵等产生弹性力,压迫件就可以是任意类型。然而,为了倾斜轴线L2,需要特定量的行程。因此,对于卷簧等,期望的是能够提供所述行程。
参照图51,将描述联接件4150的安装方法。
如图51所示,销155进入联接件4150的待用空间4150g中。联接件4150的一部分被插入鼓支承件4157的空间4157b中。此时,正如之前已经描述的,压迫件4159a、4159b通过接触件4160a、4160b将凸缘部4150j推压到预定位置。螺钉(图52的4158a、4158b)被旋拧入设置在支承件4157中的孔4157g1或4157g2中,由此,支承件被固定至第二框架118。由此,能够确保压迫件4159a、4159b对联接件4150的压迫力。并且轴线L2相对于轴线L1倾斜(图52)。
参照图53,将描述联接件4150与驱动轴180的接合操作(盒的安装操作的一部分)。图53(a1)和(b1)显示了刚好在接合之前的状态,图53(a2)和(b2)显示了接合完成的状态,图53(c1)显示了它们之间的状态。
在图53(a1)和(b1)中,联接件4150的轴线L2事先相对于轴线L1朝着安装方向X4倾斜(预接合角位置)。通过联接件4150倾斜,相对于轴线L1的方向的下游自由端位置4150A1比自由端180b3更接近感光鼓107。另外,自由端位置4150A2比自由端180b3更接近销182。换言之,正如之前已经描述的,联接件4150的凸缘部4150j被压迫件4159按压。因此,通过压迫力,轴线L2相对于轴线L1倾斜。
随后,通过盒B沿安装方向X4移动,销(旋转力施加部)182的自由端表面180b或自由端(主组件侧接合部)与联接件4150(盒侧接触部)的驱动轴接收面4150f或突起4150d接触。图53(c1)显示了销182与接收面4150f接触的状态。并且轴线L2通过接触力(盒的安装力)朝着与轴线L1平行的方向接近。同时,由设置在凸缘部4150j中的弹簧4159的弹性力所按压的按压部4150j1沿着弹簧4159的压缩方向移动。最后,轴线L1和轴线L2变成同轴。联接件4150进入待用位置用于实施旋转力的传递(图53(a2,b2)旋转力传递角位置)。
类似于第一实施例,旋转力从电机186通过驱动轴180被传递至联接件4150、销155、鼓轴153和感光鼓107。在旋转时,压迫件4159的压迫力作用在联接件4150上。然而,正如之前已经描述的,压迫件4159的压迫力通过接触件4160作用至联接件4150。因此,联接件4150能够在没有高负荷的情况下旋转。另外,如果电机186的驱动转矩并非太大,则可以不设置接触件4160。在这种情况下,即使不设置接触件4160,联接件4150也能高精度地传递旋转力。
另外,在盒B从设备主组件A中被拆下的过程中,遵循与安装步骤相反的步骤。换言之,通过压迫件4159,联接件4150通常相对于安装方向X4被压迫向下游侧。因此,在盒B的拆卸过程中,接收面4150f在相对于安装方向X4的上游侧与销182的自由端部182A接触(图53(c1))。另外,在相对于安装方向X4的下游,有必要在传递面4150f的自由端180b与驱动轴180之间设置间隙n50。在上述实施例中,在盒的拆卸过程中,联接件的相对于安装方向X4的下游的接收面150f或突起150d已经被描述至少与驱动轴180的自由端部180b接触(例如,图25)。然而,在本实施例中,在相对于安装方向X4的下游,联接件的接收面150f或突起4150d不与驱动轴180的自由端部180b接触,但是相应于盒B的拆卸操作,联接件4150能够与驱动轴180分离。即使在联接件4150与驱动轴180分离后,通过压迫件4159的压迫力,轴线L2相对于轴线L1朝着安装方向X4的下游倾斜(脱离角位置)。更具体地说,在该实施例中,预接合角位置相对于轴线L1的角度和脱离角位置相对于轴线L1的角度相对彼此是相等的。这是因为通过弹簧的弹性力压迫联接件4150。
另外,压迫件4159具有倾斜轴线L2的功能,并且它进一步具有调节联接件4150的倾斜方向的功能。更具体地说,压迫件4159还用作用于调节联接件4150的倾斜方向的调节装置。
正如之前已经描述的,在该实施例中,联接件4150被设置在支承件4157中的压迫件4159的弹性力压迫。由此,轴线L2相对于轴线L1倾斜。因此,保持联接件4150的倾斜状态。因此,联接件4150能够确定地与驱动轴180接合。
在该实施例中描述的压迫件4159被设置在支承件4157的肋4157e中。然而,本实施例并不限制于这个例子。例如,它可以为支承件4157的另一部分并且可以是固定至盒B的任何构件(除支承件外)。
另外,在该实施例中,压迫件4159的压迫方向是轴线L1的方向。然而,压迫方向可以是任何方向,只要轴线L2相对于盒B的安装方向X4朝着下游倾斜即可。
另外,为了相对于盒B的安装方向朝着下游更加确定地倾斜联接件4150,可以在处理盒中设置用于调节联接件的倾斜方向的调节部(图31)。
另外,在该实施例中,压迫件4159的作用部位于凸缘部4150j处。然而,联接件的位置可以是任意的,只要轴线L2相对于盒的安装方向朝着下游倾斜即可。
另外,本实施例可以与第四实施例结合实施。在这种情况下,能够进一步确保联接件的安装和拆卸操作。
[第六实施例]
参照图54-图58,将描述本发明的第六实施例。
在该实施例中,将描述保持轴线L2相对于轴线L1倾斜的状态的另一装置。
图54是该实施例的处理盒的分解透视图。图55是盒的驱动侧的放大侧视图。图56是鼓轴、联接件和支承件的示意性纵向剖视图。图57是显示了相对于驱动轴安装联接件的操作的纵向剖视图。图58是显示了联接件锁定件的改型例子的剖视图。
如图54和图56所示,鼓支承件5157设有联接件锁定件5157k。在沿轴线L1的方向装配支承件5157时,锁定件5157k的锁定面5157k1的一部分与凸缘部5150j的上表面5150j1接合,同时与联接件5150的倾斜面5150m接触。此时,凸缘部5150j以沿着旋转方向有游隙的方式支撑在锁定部5157k的锁定面5157k1与鼓轴153的圆形柱部153a之间。通过提供所述游隙(角度α48),提供了以下效果:更具体地说,即使联接件5150、支承件5157和鼓轴153的尺寸在其公差的范围内变化,上表面5150j1也能确定地锁定在锁定面5157k1中。
如图56(a)所示,至于轴线L2,从动部5150a侧相对于轴线L1关于盒的安装方向X4朝着下游倾斜。另外,由于凸缘部5150j在整个周长上存在,所以无论联接件5150的相位如何其均能保持。另外,正如已经关于第一实施例描述的,通过作为调节装置的调节部5157h1或5157h2(图55),联接件5150能够仅仅沿着安装方向X4倾斜。另外,在该实施例中,联接件锁定件5157k相对于盒的安装方向X4被设置在最下游侧。
正如以后将要描述的,在联接件5150与驱动轴180接合的状态下,如图56(b)所示,凸缘部5150j从锁定件5157k释放。联接件5150脱离锁定件5157k。当在装配支承件5157的情况下不能保持倾斜联接件5150的状态时,联接件的从动部5150a由工具等推压(图56(b)箭头X14)。通过这样做,联接件5150能够被容易地返回至倾斜保持状态(图56(a))。
另外,肋5157m被设置用来防止使用者易于碰到联接件。所述肋5157m被设置为在联接件的倾斜状态下与自由端位置处于大致相同的高度(图56(a))。参照图57,将描述用于将联接件5150与驱动轴180接合的操作(盒的安装操作的一部分)。在图57中,(a)显示了刚好在接合之前联接件的状态,(b)显示了在联接件5150的一部分经过驱动轴180之后的状态,(c)显示了通过驱动轴180解除联接件5150的倾斜的状态,以及(d)显示了接合状态。
在状态(a)和(b)中,联接件5150的轴线L2事先相对于轴线L1朝着安装方向X4倾斜(预接合角位置)。通过联接件5150倾斜,在轴线L1的方向上,自由端位置5150A1比自由端180b3更接近感光鼓。另外,自由端位置5150A2比自由端180b3更接近销182。另外,正如之前已经描述的,此时,凸缘部5150j与锁定面5157k1接触,并且保持联接件5150的倾斜状态。
随后,如图(c)所示,通过盒B沿安装方向X4移动,接收面5150f或突起5150d与自由端部180b或销182接触。凸缘部5150j通过其接触力与锁定面5157k1分离。并且解除联接件5150相对支承件5157的锁定。响应于盒安装操作,联接件倾斜成使得其轴线L2变得与轴线L1大致同轴。在凸缘部5150j经过之后,锁定件5157k通过恢复力返回至以前位置。此时,联接件5150脱离锁定件5157k。最后,如图(d)所示,轴线L1与轴线L2变得大致同轴,并且形成等待旋转状态(旋转力传递角位置)。
另外,在将盒B从设备主组件A中拆卸的过程中(图25)遵循类似于第一实施例的步骤。更具体地说,通过沿盒的拆卸方向X6的运动,联接件5150按顺序(d)、(c)、(b)和(a)改变。首先,自由端部180b推压接收面5150f(盒侧接触部)。由此,轴线L2相对于轴线L1倾斜并且凸缘部的下表面5150j2开始与锁定件5157k的倾斜面5157k2接触。锁定件5157k的弹性部5157k3弯曲,并且锁定面自由端5157k4从凸缘部5150j的倾斜轨迹(图57(c))上避让。另外,当盒沿拆卸方向X6前进时,凸缘部5150j和锁定面5157k1相对彼此接触。由此,保持联接件5150的倾斜角(图57(b))。更具体地说,联接件5150从旋转力传递角位置摆动(枢转)到脱离角位置。
正如之前已经描述的,通过锁定件5157k保持联接件5150的角位置。由此,保持联接件的倾斜角度。因此,联接件5150能够确定地与驱动轴180接合。另外,在旋转时,锁定件5157k不与联接件5150接触。因此,通过联接件5150能够实现稳定的旋转。
图56、57和58所示的联接件的运动可以包括旋转运动。
在该实施例中,锁定件5157k设有弹性部。然而,它可以是不具有弹性部的肋。更具体地说,减小了锁定件5157k与凸缘部5150j之间的接合的量。由此,通过使凸缘部5150j稍微变形(图58(a)),能够提供类似的效果。
另外,锁定件5157k相对于安装方向X4被设置在最下游侧。然而,锁定件5157k的位置可以是任意的,只要能够保持轴线L2朝着预定方向的倾斜即可。
图58(b)和(c)显示了这样的例子:在该例子中,联接件锁定部5357k(图58b)和5457k(图58c)相对于安装件方向X4被设置在上游。
另外,在上述实施例中,锁定件5157k由支承件5157的一部分构成。然而,它可以由除支承件之外的构件的一部分构成,只要锁定件5157k被固定至盒B即可。另外,锁定件可以是一单独件。
另外,本实施例可以与第四实施例或第五实施例一起实施。在这种情况下,能实现具有更加确定的连接的安装和拆卸操作。
[第七实施例]
参照图59-图62,将描述本发明的第七实施例。
在该实施例中,将描述用于保持联接件的轴线处在相对于感光鼓的轴线倾斜的状态下的另一装置。
图59是显示了将一磁性件(本实施例特有的)粘贴在鼓支承件上的状态的透视图。图60是分解透视图。图61是盒的驱动侧主要部件的放大透视图。图62是显示了驱动轴和联接件之间的接合状态的透视图和纵向剖视图。
如图59所示,鼓支承件8157构成围绕联接件的一部分的空间8157b。在构成所述空间的圆柱面8157i上粘贴作为用于保持联接件8150倾斜的保持件的磁性件8159。另外,如图59所示,磁性件8159被设置在圆柱面8157i(相对于安装方向X4)的上游。正如下面将要描述的,该磁性件8159是用于临时保持轴线L2相对于轴线L1倾斜的状态的构件。这里,联接件8150的一部分由磁性材料制成。并且该磁性部通过磁性件8159的磁力被附接至磁性件8159。在该实施例中,凸缘部8150j的大致整个周长由金属磁材料8160制成。换言之,如图61所示,凸缘部8150j通过磁力与该磁性件8159接触。由此,轴线L2保持相对于轴线L1关于盒的安装方向X4朝着下游倾斜的状态(图62(a1))。类似于第一实施例(图31),在支承件8157中优选设置倾斜方向调节肋8157h。通过设置肋8157h更加确定地确定联接件8150的倾斜方向。并且由磁性材料制成的凸缘部8150j与磁性件能够更确定地彼此接触。参照图60,将描述联接件8150的装配方法。
如图60所示,销155进入联接件8150的待用空间8150g中,并且联接件8150的一部分被插入鼓支承件8157的空间部8157b中。此时,优选地,支承件8157的保持肋8157e的内表面端与磁性件8159之间的距离D12比从动部8150a的最大外径φD10大。另外,所述距离D12比驱动部8150b的最大外径φD11小。由此,能够笔直地装配支承件8157。因此,改进了装配性能。然而,本发明并不限制于这种关系。
参照图62,将描述用于将联接件8150与驱动轴180接合的接合操作(盒的安装操作的一部分)。图62(a1)和(b1)显示了刚好在接合之前的状态,图62(a2)和(b2)显示了接合完成的状态。
如图62(a1)和(b1)所示,联接件8150的轴线L2通过磁性件(保持件)8159的力事先相对于轴线L1朝着安装方向X4的下游倾斜(预接合角位置)。
随后,通过盒B向安装方向X4移动,自由端面180b或销182自由端与联接件8150的驱动轴接收面8150f接触。轴线L2通过其接触力(盒的安装力)可以变得接近与轴线L1大致同轴。此时,凸缘部8150j与磁性件8159分离,并且处于非接触状态。最后,轴线L1和L2变得大致同轴。并且联接件8150处于旋转等待状态(图62(a2),图(b2))(旋转力传递角位置)。
图62所示的运动可以包括旋转运动。
正如之前已经描述的,在该实施例中,通过粘贴在支承件8157上的磁性件8159(保持件)的磁力保持轴线L2的倾斜状态。由此,联接件能够更加确定地与驱动轴接合。
[第八实施例]
参照图63-图68,将描述本发明的第八实施例。
在该实施例中,将描述用于保持轴线L2相对于轴线L1倾斜的状态的另一装置。
图63是显示了盒的驱动侧的透视图。图64是显示了在装配鼓支承件之前的状态的分解透视图。图65是鼓轴、联接件和鼓支承件的示意性纵向剖视图。图66是显示了设备主组件引导件的驱动侧的透视图。图67是显示了锁定件的脱离的纵向剖视图。图68是显示了联接件与驱动轴的接合操作的纵向剖视图。
如图63所示,联接件6150通过锁定件6159和弹簧件6158相对于安装方向X4朝着下游倾斜。
首先,参照图64,将描述鼓支承件6157、锁定件6159和弹簧件6158。支承件6157设有开口6157v。开口6157v与锁定部(锁定件)6159a彼此接合。由此,锁定部6159a的自由端6159a1伸入到支承件6157的空间部6157b中。正如后面将要描述的,联接件6150的倾斜状态通过该锁定部6159a保持。锁定件6159被安装至支承件6157的空间6157p。弹簧件6158通过孔6159b的凸台6157m和支承件6157进行安装。本实施例的弹簧件6158应用具有大约50g-300g弹簧力(弹性力)的压缩卷簧。然而,可以使用任何弹簧,只要该弹簧是产生预定弹簧力的弹簧。另外,锁定件6159可以通过与狭槽6159d和肋6157k接合而沿着安装方向X4移动。
当盒B位于设备主组件A外侧时(盒B未被安装至设备主组件A的状态),联接件6150处于倾斜状态。在该状态下,锁定件6159的锁定部自由端6159a1位于凸缘部6150j的可移动范围T2(阴影线)内。图64(a)显示了联接件6150的方位。由此,能够保持联接件的倾斜方位。另外,通过弹簧件6158的弹簧力,锁定件6159与支承件6157的外表面6157q(图64(b))抵靠。由此,联接件6150能够保持该稳定方位。为了使联接件6150与驱动轴180接合,解除所述锁定以允许轴线L2的倾斜。换言之,如图65(b)所示,锁定部自由端6159a1沿着方向X12移动以便从凸缘部6150j的可移动范围T2回缩。
将进一步进行描述锁定件6159的释放。
如图66所示,主组件导向件6130R1设有锁定释放件6131。在将盒B安装至设备主组件A时,释放件6131与锁定件6159彼此接合。由此,改变锁定件6159在盒B中的位置。因此,联接件6150变得可枢转。
参照图67,将描述锁定件6159的释放。当通过所述运动联接件6150的自由端位置6150A1沿着盒B的安装方向X4到达轴自由端180b3的附近时,释放件6131与锁定件6159彼此接合。此时,释放件6131(接触部)的肋6131a与锁定件6159(力接收部)的钩部6159c彼此接触。由此,固定锁定件6159在设备主组件A的内侧的位置(b)。随后,通过盒沿安装方向移过1-3mm,锁定部自由端6159a1位于空间部6157b中。因此,驱动轴180与联接件6150可以彼此接合,并且联接件6150处于可摆动(可枢转)状态(c)。
参照图68,将描述联接件相对于驱动轴的接合操作和锁定件的位置。
在图68(a)和(b)的状态中,联接件6150的轴线L2事先相对于轴线L1朝着安装方向X4倾斜(预接合角位置)。此时,相对于轴线L1的方向,自由端位置6150A1比轴自由端180b3更接近感光鼓107,并且自由端位置6150A2比轴自由端180b3更接近销182。在状态(a)中,锁定件(力接收部)6159被接合在用于从锁定释放件(接触部)6131接收力的状态中。并且在状态(b)中,锁定部自由端6159a1从空间部6157b回缩。由此,联接件6150从方位保持状态被释放。更具体地说,联接件6150变得可摆动(可枢转)。
随后,如图(c)所示,通过盒朝着安装方向X4的运动,联接件6150(盒侧接触部)的驱动轴接收面6150f或者突起6150d与自由端部180b或销182接触。响应于盒的运动,轴线L2可以变得接近与轴线L1大致同轴。最后,如图(d)所示,轴线L1与轴线L2变得大致同轴。由此,联接件6150处于旋转等待状态(旋转力传递角位置)。
锁定件6159回缩的定时如下。更具体地说,在自由端位置6150A1从轴自由端180b3旁边经过之后,并且在接收面6150f或突起6150d与自由端部180b或销182接触之前,锁定件6159回缩。通过这样做,联接件6150不会接收过度的载荷,并且实现确定的安装操作。接收面6150f具有锥形形状。
另外,在盒B从设备主组件A拆卸的过程中,遵循与安装步骤相反的步骤。更具体地说,通过沿拆卸方向移动盒B,驱动轴(主组件侧接合部)180的自由端部180b推压接收面6150f(盒侧接触部)。由此,轴线L2开始(图68(c))相对于轴线L1倾斜。联接件6150完全从轴自由端180b3旁边经过(图68(b))。在这之后钩部6159c立即与肋6131a间隔开。锁定部自由端6159a1与凸缘部的下表面6150j2接触。因此,保持联接件6150的倾斜状态(图68(a))。更具体地说,联接件6150从旋转力传递角位置被枢转至脱离角位置(摆动)。
图67和68所示的运动可以包括旋转运动。
正如之前已经描述的,联接件6150的倾斜角位置由锁定件6159保持。由此,保持联接件的倾斜状态。因此,联接件6150被更确定地相对驱动轴180安装。另外,在旋转时,锁定件6159不与联接件6150接触。因此,联接件6150能够实施更稳定的旋转。
在上述实施例中,锁定件相对于安装方向被设置在上游。然而,锁定件的位置可以是任意的,只要保持联接件的轴线沿预定方向的倾斜。
另外,本实施例可以与第四至第七实施例一起实施。在这种情况下,能够保证联接件的安装和拆卸操作。
[第九实施例]
参照图69-图73,将描述本发明的第九实施例。
在该实施例中,将描述用于相对于轴线L1倾斜轴线L2的另一装置。
图69是盒的驱动侧的放大侧视图。图70是显示了设备主组件的驱动侧的透视图。图71是显示了盒与主组件引导件之间的关系的侧视图。图72是显示了主组件引导件与联接件之间的关系的侧视图和透视图。图73是显示了安装过程的侧视图。
图69(a1)和图69(b1)是盒的侧视图(从驱动轴侧看时),图69(a2)和图69(b2)是盒的驱动轴的侧视图(从相反侧看时)。如图69所示,在可以相对于安装方向(X4)朝着下游枢转的状态下,联接件7150被安装至鼓支承件7157。另外,至于倾斜方向,正如已经关于第一实施例所描述的,它可以通过保持肋(调节装置)7157e相对于安装方向X4仅仅向下游枢转。另外,在图69(b1)中,联接件7150的轴线L2相对于水平线以角度α60倾斜。联接件7150以角度α60倾斜的原因如下:在联接件7150的凸缘部7150j中,调节部7157h1或7157h2作为调节装置调节,因此,联接件7150的下游侧(安装方向)可以以α60的角度朝着向上的方向枢转倾斜。
参照图70,将描述主组件引导件7130R。主组件引导件7130R1包括用于通过联接件7150引导盒B的引导肋7130R1a以及盒定位部7130R1e、7130R1f。所述肋7130R1a位于盒B的安装轨迹上。肋7130R1a相对于盒安装方向延伸至刚好到驱动轴180跟前。邻近驱动轴180的肋7130R1b的高度能避免当联接件7150与驱动轴180接合时干涉。主组件引导件7130R2主要包括引导部7130R2a和盒定位部7130R2c,用于在安装盒时通过引导盒框架B1的一部分而确定方位。
将描述在安装盒时主组件引导件7130R与盒之间的关系。
如图71(a)所示,在驱动侧,当联接件7150的连接部(力接收部)7150c与引导肋(接触部)7130R1a接触时,盒B移动。此时,支承件7157的盒引导件7157a与引导面7130R1c分开预定距离n59。因此,盒B的重量被施加给联接件7150。另外,另一方面,正如之前已经描述的,联接件7150被设置成使得它可以朝着以下方向枢转,其中安装方向的下游侧相对于安装方向X4向上倾斜角度α60。因此,联接件7150的从动部7150a相对于安装方向X4朝着下游(从安装方向倾斜角度α60的方向)倾斜(图72)。
联接件7150的倾斜原因如下:连接部7150c受到来自引导肋7130R1a的与盒B的重量相应的反作用力,并且,所述反作用力施加至调节部7157h1或7157h2以调节所述倾斜方向,由此,联接件向预定方向倾斜。
这里,当连接部7150c在引导肋7130R1a上移动时,在连接部7150c和引导肋7130R1a之间有摩擦力。因此,联接件7150通过所述摩擦力受到沿着与安装方向X4相反的方向的力。然而,由连接部7150c和引导肋7130R1a之间的摩擦系数所产生的摩擦力要小于通过前述反作用力使联接件7150向着相对于安装方向X4的下游枢转的力。因此,联接件7150克服所述摩擦力并向着相对于安装方向X4的下游枢转。
支承件7157的调节部7157p(图69)可以被用作调节所述倾斜的调节装置。由此,通过调节部7157h1、7157h2(图69)以及调节部7157p,能够在相对于轴线L2的方向的不同位置处对联接件的倾斜方向进行调节。由此,能够更加确定地调节联接件7150倾斜的方向。另外,它能够总是朝着大约α60的角度倾斜。然而,可以通过另一装置调节联接件7150的倾斜方向。
另外,引导肋7130R1a位于由从动部7150a、驱动部7150b和连接部7150c构成的空间7150s中。因此,在安装过程中,联接件7150在设备主组件A的内侧的纵向位置(轴线L2的方向)被调节(图71)。通过调节联接件7150的纵向位置,联接件7150能够更加确定地与驱动轴180接合。
下面将描述用于使联接件7150与驱动轴180接合的接合操作。所述接合操作与第一实施例中的操作(图22)相同。这里,参照图73,将描述在联接件与驱动轴180相接合过程中的主组件引导件7130R2、支承件7157和联接件7150的关系。只要连接部7150c与肋7130R1a接触,盒引导件7157a就与引导面7130R1c分离。由此,联接件7150倾斜(图73(a),图73(d))(预接合角位置)。在倾斜联接件7150的自由端7150A1从轴自由端180b3旁边经过时,连接部7150c与引导肋7130R1a分离(图73(b),图73(e))。此时,盒引导件7157a通过引导面7130R1c,并且开始通过所述倾斜面7130R1d与定位面7130R1e接触(图73(b),图73(e))。之后,接收面7150f或突起7150d与自由端部180b或销182接触。响应于盒安装操作,轴线L2变得与轴线L1大致同轴,并且鼓轴的中心与联接件的中心彼此对准。最后,如图73(c)和图73(f)所示,轴线L1和轴线L2相对彼此同轴。联接件7150处于旋转等待状态(旋转力传递角位置)。
另外,在从设备主组件A中取出盒B的过程中遵循与接合步骤大致相反的步骤。换言之,盒B沿拆卸方向移动。由此,自由端部180b推压接收面7150f。由此,轴线L2开始相对于轴线L1倾斜。通过盒的拆卸操作,相对于拆卸方向的上游自由端部7150A1在轴自由端180b上移动,并且轴线L2倾斜直至上自由端部A1到达驱动轴自由端180b3。在该状态下联接件7150完全从轴自由端180b3旁边经过(图73(b))。之后,连接部7150c使联接件7150与肋7130R1a接触。由此,在相对于安装方向朝着下游倾斜的状态下取出联接件7150。换言之,联接件5150从旋转力传递角位置枢转至脱离角位置(摆动)。
正如之前已经描述的,通过使用者将盒安装至主组件,联接件摆动,并且它与主组件驱动轴接合。另外,不再需要用于保持联接件的方位的特殊装置。然而,与第四实施例-第八实施例中相同的方位保持结构可以与本实施例一起使用。
在该实施例中,通过向引导肋施加重量,联接件朝着安装方向倾斜。然而,不仅利用重量,还可以进一步利用弹簧力等。
在该实施例中,联接件通过联接件的连接部接收所述力而倾斜。然而,本实施例并不限制于该例子。例如,除连接部之外的部分可以与接触部接触,只要联接件通过从主组件的接触部接收力而倾斜。
另外,本实施例可以与第四实施例-第八实施例一起实施。在这种情况下,能够保证相对于联接件的驱动轴的接合和脱离。
[第十实施例]
参照图74-图81,将描述本发明的第十实施例。
在该实施例中,将描述用于相对于轴线L1倾斜轴线L2的另一装置。
图74是显示了设备主组件的驱动侧的透视图。
参照图74,将描述主组件引导件和联接件压迫装置。
当第九实施例中所描述的摩擦力大于由于反作用力而使联接件7150向着(安装方向X4的)下游枢转的力的情况下,本实施例可以有效地应用。更具体地说,例如,根据该实施例,即使由于连接部或主组件引导件的刮擦作用而使摩擦力增加,联接件也能确定地枢转至预接合角位置。主组件引导件1130R1包括用于通过盒引导件140R1(图2)引导盒B的引导面1130R1b、引导联接件150的引导肋1130R1c以及盒定位部1130R1a。引导肋1130R1c位于盒B的安装轨迹上。并且引导肋1130R1c相对于盒安装方向延伸至刚好到驱动轴180跟前。另外,邻近驱动轴180设置的肋1130R1d的高度在联接件150接合时不会造成干涉。
肋1130R1c的一部分被切除。主组件引导滑动件1131沿着箭头W的方向可滑动地被安装至肋1130R1c。滑动件1131被压迫弹簧1132的弹性力按压,并且其位置通过滑动件1131抵靠主组件引导件1130R1的抵接面1130R1e而确定。在这种状态下,滑动件1131从引导肋1130R1c突出。
主组件引导件1130R2具有引导部1130R2b,用于在安装盒B时通过引导盒框架B1的一部分而确定方位;另外还具有盒定位部1130R2a。
参照图75-图77,将描述在安装盒B时主组件引导件1130R1、1130R2、滑动件1131和盒B之间的关系。图75是从主组件驱动轴180(图1和2)侧看时的侧视图。图77是沿着图75的Z-Z截取的剖视图。
如图75所示,在驱动侧,当盒的盒引导件140R1与引导面1130R1b接触时,盒移动。此时,如图77所示,连接部150c与引导肋1130R1c分开预定距离n1。因此,力不被施加到联接件150。另外,如图75所示,联接件150在上表面和左侧由调节部140R1a调节。因此,联接件150仅仅沿着安装方向X4自由枢转。
参照图78-图81,将描述在联接件150与滑动件1131接触时将滑动件1131从作用位置移至回退位置的操作。在图78-图79中,联接件150与滑动件1131的顶点1131b接触,更具体地说,滑动件1131位于回退位置。由于仅能沿着安装方向X4枢转的联接件150的进入,连接部150c与滑动件1131的突起的倾斜面1131a彼此接触。由此,滑动件1131被压下并且它移至回退位置。
参照图80-图81,将描述在联接件150骑跨在滑动件1131的顶点1131b上之后的操作。图80-图81显示了在联接件150骑跨在滑动件131的顶点1131b上之后的状态。
当联接件150骑跨在顶点1131b上时,滑动件1131趋于通过压迫弹簧132的弹力从回退位置返回至作用位置。在那种情况下,联接件150的连接部150c的一部分受到来自滑动件1131的倾斜面1131c的力F。更具体地说,所述倾斜面1131c用作力施加部,并且它用作针对连接部150c的一部分的力接收部以便接收力。如图80所示,力接收部相对于盒安装方向被设置在连接部150c的上游。因此,能够平稳地倾斜联接件150。如图81所示,另外,力F被分成分力F1和分力F2。此时,联接件150的上表面被调节部140R1a调节。因此,联接件150通过分力F2朝着安装方向X4倾斜。更具体地说,联接件150朝着预接合角位置倾斜。由此,联接件150变成可与驱动轴180接合。
在上述实施例中,连接部接收力并且联接件倾斜。然而,本实施例并不限制于该例子。例如,除连接部之外的部分可以与接触部接触,只要联接件通过从主组件的接触部接收力可以枢转即可。
另外,本实施例可以与第四-第九实施例中的任何一个一起实施。在这种情况下,能够保证联接件相对于驱动轴的接合和脱离。
[第十一实施例]
参照图82-图84,将描述本发明的第十一实施例。
在本实施例中,将描述联接件的构造。图82(a)-图84(a)是联接件的透视图,图82(b)-图84(b)是联接件的剖视图。
在前面的实施例中,联接件的驱动轴接收面和鼓支承面分别具有圆锥形状。然而,在该实施例中,将描述不同的构造。
类似于图8所示的联接件,图82所示联接件12150主要包括三部分。更具体地说,如图82(b)所示,联接件12150包括用于从驱动轴接收力的从动部12150a、用于将驱动传递至鼓轴的驱动部12150b以及将从动部12150a与驱动部12150b彼此连接起来的连接部12150c。
如图82(b)所示,从动部12150a具有驱动轴插入开口部12150m,其作为相对于轴线L2朝着驱动轴180扩张的扩张部;驱动部12150b具有鼓轴插入开口部12150v,其作为朝着鼓轴153扩张的扩张部。开口12150m和开口12150v分别由发散形状的驱动轴接收面12150f、发散形状的鼓支承面12150i构成。如图所示,接收面12150f和接收面12150i具有凹部12150x、12150z。在旋转力传递时,凹部12150z与驱动轴180的自由端相对。更具体地说,凹部12150z覆盖驱动轴180的自由端。
参照图83,将描述联接件12250。如图83(b)所示,从动部12250a具有驱动轴插入开口部12250m,其作为相对于轴线L2朝着驱动轴180扩张的扩张部;驱动部12250b具有鼓轴插入开口部12250v,其作为相对于轴线L2朝着鼓轴153扩张的扩张部。
开口12250m和开口12250v分别由钟形驱动轴接收面12250f和钟形鼓支承面12250i构成。如图所示,接收面12250f和接收面12250i构成凹部12250x、12250z。在旋转力传递时,凹部12250z与驱动轴180的自由端相对。参照图84,将描述联接件12350。如图84(a)所示,从动部12350a包括从连接部12350c直接延伸并且相对于轴线L2朝着驱动轴180径向扩张的驱动接收突起12350d1或12350d2或12350d3和12350d4。另外,邻近突起12350d1-12350d4之间的部分构成待用部分。而且,旋转力接收面(旋转力接收部)12350e(12350e1-e4)被设置在相对于旋转方向X7的上游。在旋转时,旋转力从销(旋转力施加部)182传递至旋转力接收面12350e1-e4。在旋转力传递时,凹部12250z与作为设备主组件突起的驱动轴的自由端部相对。更具体地说,凹部12250z覆盖驱动轴180的自由端。
另外,开口12350v的构造可以是任意的,只要能提供与第一实施例类似的效果。
另外,联接件安装至盒的安装方法与第一实施例相同,因此省略描述。另外,盒安装至设备主组件的操作以及从设备主组件取出盒的操作与第一实施例(图22和25)的相同,因此省略描述。
正如之前已经描述的,联接件的鼓支承面具有扩张构造,并且联接件能够相对于鼓轴的轴线被安装以便倾斜。另外,联接件的驱动轴接收面具有扩张构造并且能够倾斜联接件,而不会响应于盒B的安装操作或拆卸操作与驱动轴干涉。由此,同样在该实施例中,能够提供与第一实施例或第二实施例类似的效果。
另外,至于开口12150m、12250m和开口12150v、12250v的构造,它们可以是发散形、钟形的组合。
[第十二实施例]
参照图85,将描述本发明的第十二实施例。
本实施例在联接件的构造方面与第一实施例不同。图85(a)是具有大致圆筒形状的联接件的透视图,图85(b)是当安装至盒的联接件与驱动轴接合时的剖视图。
联接件9150的驱动侧边设有多个从动突起9150d。另外,在驱动接收突起9150d之间设置有驱动接收待用部9150k。突起9150d设有旋转力接收面(旋转力接收部)9150e。后面将要描述的驱动轴9180的旋转力传递销(旋转力施加部)9182与旋转力接收面9150e接触。由此,旋转力被传递至联接件9150。
为了稳定传递至联接件的运行扭矩,期望多个旋转力接收面150e被设置在相同的圆周上(在图8(d)的假想圆C1上)。通过以这种方式设置,旋转力传递半径是恒定的并且被传递的扭矩是稳定的。另外,从稳定驱动传递的观点看,期望接收面9150e被设置在径向相对的位置上(180度)。另外,接收面9150e的数目可以是任意的,只要驱动轴9180的销9182能够被待用部分9150k接纳。在本实施例中,数目是两个。旋转力接收面9150e可以不在相同的圆周上,或者它们可以不设置在径向相对的位置。
另外,联接件9150的圆柱面设有待用开口9150g。另外,开口9150g设有旋转力传递面(旋转力传递部)9150h。后面将要描述的鼓轴的驱动传递销(旋转力接收件)9155(图85(b))与该旋转力传递面9150h接触。由此,旋转力被传递至感光鼓107。
类似于突起9150d,期望旋转力传递面9150h径向相对地设置在相同的圆周上。
将描述鼓轴9153和驱动轴9180的结构。在第一实施例中,圆筒端是一球形面。然而,在该实施例中,鼓轴9153的球形自由端部9153b的直径大于主体部分9153a的直径。通过这种结构,即使联接件9150具有如图所示的圆筒形状,它也可以相对于轴线L1枢转。换言之,如图所示,在鼓轴9153与联接件9150之间设置有间隙g,由此,联接件9150可以相对于鼓轴9153枢转(摆动)。驱动轴9180的构造大致与鼓轴9150的构造相同。换言之,自由端部9180b的构造是球形面,并且其直径大于圆柱形部的主体部分9180a的直径。另外,设置销9182,其穿过球形面的自由端部9180b的大致中心,销9182将旋转力传递至联接件9150的旋转力接收面9150e。
鼓轴9150和驱动轴9180的球形面与联接件9150的内表面9150p接合。由此,鼓轴9150和驱动轴9180的联接件9150之间的相对关系得以确定。关于联接件9150的安装和拆卸操作与第一实施例相同,因此省略对其描述。
正如之前已经描述的,联接件具有圆筒形状,并且因此能够相对于鼓轴或驱动轴确定联接件9150在与轴线L2的方向垂直的方向上的位置。下面将进一步描述联接件的改型例子。在图85(c)所示联接件9250的构造中,圆筒形状和圆锥形状被放到一起。图85(d)是该改型例子的联接件的剖视图。联接件9250的从动部9250a具有圆筒形状,并且其内表面9250p与驱动轴的球形面接合。而且,它具有抵接面9250q并且能够实施在联接件9250和驱动轴180之间关于轴向方向的定位。驱动部9250b具有圆锥形状,并且类似于第一实施例,通过鼓支承面9250i确定相对于鼓轴153的位置。
图85(e)所示联接件9350的构造是圆筒形状和圆锥形状的结合。图85(f)是该改型例子的剖视图。联接件9350的从动部9350a具有圆筒形状,并且其内表面9350p与驱动轴180的球形面接合。通过使驱动轴的球形面与形成在不同直径的圆筒部之间的边缘部9350q抵接而实施沿轴向方向的定位。
图85(g)所示联接件9450的构造是球形面、圆筒形状和圆锥形状的结合。图85(h)是改型例子的剖视图,联接件9450的从动部9450a具有圆筒形状,并且其内表面9450p与驱动轴180的球形面接合。驱动轴180的球形面与作为球形面的一部分的球形面9450q接触。由此,能够相对于轴线L2的方向确定所述位置。
另外,在该实施例中,联接件具有大致圆筒形状并且鼓轴或驱动轴的自由端部具有球形构造。另外,已经描述了其直径比鼓轴或驱动轴的主体部分的直径大。然而,本实施例并不限制于这个例子。联接件具有圆筒形状并且鼓轴或驱动轴具有圆筒形状,在销不与联接件脱离的限度内,鼓轴或驱动轴的直径相对于联接件的内表面的内径可以是小的。由此,联接件相对于轴线L1是可枢转的,联接件能够倾斜,而不会响应于盒B的安装操作或拆卸操作与驱动轴干涉。因此,同样在该实施例中,能够产生类似于第一实施例或第二实施例的效果。
另外,在该实施例中,虽然圆筒形状和圆锥形状的结合的例子已经作为联接件的构造被描述,但是它可以与该例子相反。换言之,驱动轴侧可以形成为圆锥形状,并且鼓轴侧可以形成为圆筒形状。
[第十三实施例]
参照图86-图88,将描述本发明的第十三实施例。
本实施例与第一实施例的不同在于联接件相对于驱动轴的安装操作以及关于它的结构中。图86是显示了该实施例的联接件10150的构造的透视图。联接件10150的构造是圆筒形状与圆锥形状的结合,这已经在第十实施例中被描述过。另外,在联接件10150的自由端侧上设置锥形面10150r。另外,在驱动接收突起10150d的相对于轴线L1的方向的相反侧的表面设有压迫力接收面10150s。
参照图87,将描述联接件的结构。
联接件10150的内表面10150p与鼓轴10153的球形面10153b彼此接合。在前面描述的接收面10150s与鼓法兰10151的底面10151b之间设置有压迫件10634。由此,联接件10150被压迫朝向驱动轴180。另外,类似于前面的实施例,保持肋10157e相对于轴线L1的方向被设置在凸缘部10150j的驱动轴180侧。由此,防止联接件10150与盒脱离,联接件10150的内表面10150p是圆柱形。因此,它可以沿着轴线L2的方向移动。
图88是用于显示在联接件与驱动轴接合的情况下联接件的方位。图88(a)是第一实施例的联接件150的剖视图,图88(c)是本实施例的联接件10150的剖视图。图88(b)是在达到图88(c)的状态之前的剖视图,安装方向由X4表示,虚线L5是从驱动轴180的自由端画的与安装方向平行的线。
为了使联接件与驱动轴180接合,相对于安装方向的下游自由端位置10150A1需要通过驱动轴180的自由端部180b3。在第一实施例的情况下,轴线L2倾斜超过角度α104的角度。由此,联接件移至自由端位置150A1不与自由端部180b3干涉的位置(图88(a))。
另一方面,在本实施例的联接件10150中,在它不与驱动轴180接合的状态下,通过压迫件10634的回复力,联接件10150进入最靠近驱动轴180的位置。在该状态下,当它沿着安装方向X4移动时,驱动轴180的一部分在联接件10150的锥形面10150r处与盒B接触(图88(b))。此时,此时,力沿着与X4方向相反的方向被施加到锥形面10150r,并且联接件10150通过其分力沿着纵向方向X11回缩。鼓轴10153的自由端部10153b抵接联接件10150的抵接部10150t。另外,联接件10150围绕自由端部10153b的中心P1顺时针旋转(预接合角位置)。由此,联接件的自由端位置10150A1从驱动轴180的自由端180b旁边经过(图88(c))。当驱动轴180和鼓轴10153变得大致同轴时,联接件10150的驱动轴接收面10150f通过压迫弹簧10634的回复力与自由端部180b接触。由此,联接件变得处于旋转等待状态(图87)(旋转力传递角位置)。通过这种结构,结合沿轴线L2方向的运动与枢转运动(摆动操作),并且联接件从预接合角位置摆动到旋转力传递角位置。
通过这种结构,即使角度α106(轴线L2的倾斜量)是小的,盒也能安装至设备主组件A。因此,联接件10150的枢转运动所需的空间是小的。因此,改进了在设备主组件A的设计方面的自由度。
联接件10150的驱动轴180的旋转与第一实施例的相同,并且因此省略其描述。在从设备主组件A中取出盒B时,通过移除力迫使自由端部180b位于联接件10150的圆锥形驱动轴接收面10150f上。通过所述力枢转联接件10150,同时朝着轴线L2的方向回缩,由此,从驱动轴180上拆卸联接件。换言之,沿轴线L2方向的移动操作与所述枢转运动被结合(可以包括旋转运动),联接件能够从旋转力传递角位置枢转至脱离角位置。
[第十四实施例]
参照图89-图90,将描述本发明的第十四实施例。
本实施例与第一实施例的不同之处在于联接件相对于驱动轴的接合操作以及关于它的结构。
图89是仅仅显示了联接件21150和鼓轴153的透视图。图90是从设备主组件的下部看时的纵向剖视图。如图89所示,磁性件21100被安装至联接件21150的驱动部21150a的端部。图90所示的驱动轴180包括磁性材料。因此,在该实施例中,通过驱动轴180与磁性材料之间的磁力,磁性件21100在联接件21150中是倾斜的。
首先,如图90(a)所示,联接件21150在此时不是特别地相对于鼓轴153倾斜,磁性件21100定位在驱动部21150a中的相对于安装方向X4的上游位置。
当磁性件21100被插至图90(b)所示的位置时,它被朝着驱动轴180吸引。如图所示,联接件21150通过其磁力开始摆动运动。
随后,联接件21150相对于安装方向X4的前端位置21150A1从具有球形面的驱动轴自由端180b3旁边经过。在经过之后,圆锥形的驱动轴接收面21150f或者构成联接件21150的凹部21150z的从动突起21150d(盒侧接触部)与自由端部180b或182接触(图90(c))。
响应于盒B的安装操作,联接件21150倾斜为使得轴线L2变得与轴线L1大致同轴(图90(d))。
最后,轴线L1和轴线L2变得相对彼此大致同轴。在该状态下,凹部21150z覆盖自由端部180b。轴线L2将联接件21150从预接合角位置枢转至旋转力传递角位置,使得它与轴线L1大致同轴。联接件21150与驱动轴180彼此接合(图90(e))。
图90所示的联接件的运动还可以包括旋转。
将磁性件21100相对于安装方向X4定位在驱动部21150a的上游是必要的。
因此,在将盒B安装至设备主组件A时,有必要对准联接件21150的相位。关于第二实施例所描述的方法可用于本方法以使联接件相位加倍。
在安装完成后接收旋转驱动力和旋转的状态与第一实施例是相同的,并且因此不再描述。
[第十五实施例]
参照图91,将描述本发明的第十五实施例。
本实施例与第一实施例的不同之处在于联接件的支撑方式。在第一实施例中,联接件的轴线L2是可枢转的,同时被插在鼓轴的自由端部和保持肋之间。另一方面,在本实施例中,联接件的轴线L2仅通过鼓支承件就能够枢转,这将更详细地描述。
图91(a)是显示了在安装联接件的过程中的状态的透视图。图91(b)是其纵向剖视图。图91(c)是显示了轴线L2相对于轴线L1倾斜的状态的透视图。图91(d)是其纵向剖视图。图91(e)是显示了联接件旋转的状态的透视图。图91(f)是其剖视图。
在该实施例中,鼓轴153被放置在由鼓支承件11157的空间部11157b的内表面所限定的空间中。另外,肋11157e和肋11157p被设置在与鼓轴153相对的内表面上(在相对于轴线L1的方向不同位置处)。
通过这种结构,在轴线L2倾斜的状态下通过肋的内端面11157p1和圆形柱部11153a调节凸缘部11150j和鼓支承面11150i(图91(d))。这里,所述端面11157p1被设置在支承件11157中。另外,圆形柱部11153a是鼓轴11153的一部分。当轴线L2变得与轴线L1大致同轴时(图91(f)),凸缘部11150j和锥形外表面11150q通过肋11157e的外端11157p2和支承件11157的肋调节。
因此,通过合适地选择支承件11157的构造,联接件11150被保持在支承件11157中。另外,联接件11150能够相对于轴线L1可枢转地安装。
另外,鼓轴11153在其自由端仅具有驱动传递部,并且用于调节联接件11150的运动的球形面部等是不必要的,因此鼓轴11153的加工是容易的。
另外,肋11157e和肋11157p被错位地设置。由此,如图91(a)和图91(b)所示,联接件11150沿稍微倾斜的方向(沿图中X12)被装配到支承件11157中。更具体地说,该装配的特殊方法是不必要的。随后,联接件11150临时安装至其上的支承件11157被装配到鼓轴11153中(沿图中X13方向)。
[第十六实施例]
参照图92,将描述本发明的第十六实施例。
本实施例与第一实施例的不同在于联接件的安装方法。在第一实施例中,联接件被插在鼓轴的自由端和保持肋之间。而在该实施例中,通过鼓轴13153的旋转力传递销(旋转力接收件)13155实施联接件的保持。更具体地说,在该实施例中,通过销13155保持联接件13150。
将更详细地对此进行描述。
图92显示了被保持在感光鼓107(圆筒形鼓107a)的端部的联接件。显示了感光鼓107的驱动侧的一部分,并且为简单起见省略其他部分。
在图92(a)中,轴线L2相对轴线L1大致同轴,在该状态下,联接件13150在从动部13150a处从驱动轴180接收旋转力。联接件13150将旋转力传递至感光鼓107。
如图92(b)所示,联接件13150被安装至鼓轴13153,使得它相对于轴线L1可以沿任何方向枢转。从动部13150a的构造可以与关于图82-图85所描述的从动部的构造相同,并且以关于第一实施例所描述的方式将感光鼓单元U13装配到第二框架中。在相对于设备主组件A安装和拆卸盒B时,联接件相对于驱动轴是可以接合和分离。
将描述根据本实施例的安装方法。通过联接件13150覆盖鼓轴13153的自由端(未示出)。随后,销(旋转力接收件)13155沿着与轴线L1垂直的方向被插入鼓轴13153的孔(未显示)中。另外,销13155的相对两端向外突出超过凸缘部13150j的内表面。通过这些设置防止销13155与待用开口13150g分离。由此,没有必要添加用于防止联接件13150脱离的元件。
如上所述,根据上述实施例,鼓单元U13由圆筒形鼓107a、联接件13150、感光鼓107、鼓法兰13151、鼓轴13153、驱动传递销13155等构成。然而,鼓单元U13的结构并不限制于该例子。
能够应用到目前为止已经描述的第三-第十实施例作为用于在联接件刚好要与驱动轴接合之前将轴线L2向预接合角位置倾斜的装置。
另外,关于与盒的安装和拆卸相互关联地操作的联接件与驱动轴之间的接合和脱离,它与第一实施例相同,因此不再描述。
另外,正如关于第一实施例(图31)已经描述的,通过支承件调节联接件的倾斜方向。由此,联接件能够更加确定地与驱动轴接合。
通过上述结构,联接件13150是与感光鼓成为整体的感光鼓单元的一部分。因此,在装配时,处理是容易的,并且因此能够改进装配性能。
[第十七实施例]
参照图93,将描述本发明的第十七实施例。
本实施例与第一实施例的不同之处在于联接件的安装方法。关于第一实施例,联接件被安装至鼓轴的自由端,从而轴线L2可以相对于轴线L1沿任何方向倾斜。相反,在该实施例中,联接件15150被直接安装至感光鼓107的圆筒形鼓107a的端部,使得它可以沿任何方向倾斜。
将更详细地对此进行描述。
图93显示了电子照相感光鼓单元(“鼓单元”)U。在该图中,联接件15150被安装至感光鼓107(圆筒形鼓107a)的端部。至于感光鼓107,显示了驱动侧的一部分并且为简单起见省略了其它部分。
在图93(a)中,轴线L2相对于轴线L1大致同轴。在该状态下,联接件15150在从动部15150a处从驱动轴180接收旋转力。联接件15150将所接收的旋转力传递至感光鼓107。
在图93(b)中显示了一个例子,其中联接件15150被安装至感光鼓107的圆筒形鼓107a的端部,从而它可以沿任何方向倾斜。在该实施例中,联接件的一端不是被安装至鼓轴(突起)而是被安装到设置在圆筒107a的端部的凹部(旋转力接收件)中。联接件15150相对于轴线L1也可沿任何方向枢转。至于从动部15150a,显示了关于第一实施例所描述的构造,但是它可以是在第十或第十一实施例中所描述的联接件的从动部的构造。正如关于第一实施例已经描述的,该鼓单元U被装配到第二框架118(鼓框架)中,并且它被构造成相对设备主组件能够以可拆卸方式安装的盒。
因此,鼓单元U由联接件15150、感光鼓107(圆筒形鼓107a)、鼓法兰15151等构成。
至于用于在联接件15150就要与驱动轴180接合之前朝着预接合角位置倾斜轴线L2的结构,可以使用第三-第九实施例中的任意一个。
另外,关于与盒的安装和拆卸相互关联地操作的联接件与驱动轴之间的接合和脱离,它与第一实施例相同,因此不再描述。
另外,正如关于第一实施例(图31)已经描述的,鼓支承件设有用于调节联接件相对于轴线L1的倾斜方向的调节装置。由此,联接件能够更加确定地与驱动轴接合。
通过上述结构,联接件能够在没有前述鼓轴的情况下相对于感光鼓沿任何方向倾斜地安装。因此,能够实现成本降低。
另外,根据以上结构,联接件15150是包括感光鼓的作为一个单元的鼓单元的一部分。因此,在盒中,在装配时处理是容易的,并且改进了装配性能。
参照图94-图105,将进一步描述本实施例。
图94是使用本实施例的联接件15150的处理盒B1的透视图。设置在驱动侧的鼓支承件15157的外端的外围15157a用作盒引导件140R1。
另外,在第二框架单元120的一个纵向端(驱动侧),向外突出的盒引导件140R2被大致设置在向外突出的盒引导件140R1的上方。
处理盒通过这些盒引导件140R1、140R2以及设置在非驱动侧的盒引导件(未显示)被以可拆卸方式支撑在设备主组件中。更具体地说,当盒被安装至设备主组件A2或从设备主组件拆卸时,盒B沿着与驱动轴180的轴线L3的方向大致垂直的方向移至设置主组件A。
图95(a)是从驱动侧看时联接件的透视图,图95(b)是从感光鼓侧看时联接件的透视图,图95(c)显示了从与轴线L2垂直的方向看时联接件的视图。图95(d)是从驱动侧看时联接件的侧视图,图95(e)显示了从感光鼓侧看时的视图,图95(f)是沿着图95(d)的S21-S21截取的剖视图。
在盒B被安装至设置在设备主组件A中的设置部130a的状态下,联接件15150与驱动轴180接合。通过从设置部103a移除盒B,它与驱动轴180分离。在它与驱动轴180接合的状态下,联接件15150从电机186接收旋转力并将旋转力传递至感光鼓107。
联接件15150主要包括三部分(图95(c))。第一部分是从动部(待驱动部)15150a,它具有用于与驱动轴180接合并且从销182接收旋转力的旋转力接收面(旋转力接收部)15150e(15150e1-15150e4)。第二部分是驱动部15150b,它与鼓法兰15151(销15155(旋转力接收件))接合,并且传递旋转力。第三部分是连接从动部15150a和驱动部15150b的连接部15150c。这些部分的材料是诸如聚缩醛、聚碳酸酯和PPS等的树脂材料。然而,为了增加所述构件的刚性,根据所需负荷扭矩,可以在树脂材料中混合玻璃纤维、碳纤维等。另外,可以通过在上述树脂材料中插入金属进一步增加刚性,并且整个联接件可以用金属等制造。从动部15150a设有驱动轴插入开口部15150m,如图95(f)所示,它的形式为相对于轴线L2扩张成圆锥形状的扩张部。如图所示,开口15150m构成凹部15150z。
驱动部15150b具有球形驱动轴接收面15150i。联接件15150能够通过接收面15150i相对于轴线L1在旋转力传递角位置和预接合角位置(脱离角位置)之间枢转。由此,无论感光鼓107的旋转相位如何,联接件15150均能与驱动轴180接合,而不会被驱动轴180的自由端部180b阻挡。如图所示,驱动部15150b具有凸起构造。
多个驱动接收突起15150d1-d4被设置在从动部15150a的端面的圆周上(图8(d)中的假想圆C1)。另外,邻近的突起15150d1或15150d2或15150d3和15150d4之间的间距用作驱动接收待用部分15150k1、15150k2、15150k3、15150k4。邻近突起15150d1-d4之间的每个间隔比销182的外径大,使得销(旋转力施加部)182被接纳,这些间隔是待用部分15150k1-k4。另外,在图95(d)中,在突起15150d的顺时针下游,设置旋转力接收面(旋转力接收部)15150e1-15150e4,其面向与联接件15150的旋转运动的方向横交的方向。当驱动轴180旋转时,销182抵靠或接触驱动力接收面15150e1-15150e4的其中一个。驱动力接收面15150由销182的侧面推压,并且使联接件15150围绕轴线L2旋转。
另外,驱动部15150b具有球形面。通过设置球形面,不管感光鼓107在盒B中的旋转相位(摆动)如何,联接件15150均能够在旋转力传递角位置和预接合角位置(或脱离角位置)之间枢转。在图示例子中,球形面是球形鼓支承面15150i,其轴线与轴线L2对准。贯通其中心形成有让销(旋转力传递部)15155穿透并锚固的孔15150g。
参照图96,将针对安装联接件15150的鼓法兰15151的例子进行描述。图96(a)显示了从驱动轴侧看时的视图,图96(b)是沿图96(a)的S22-S22线截取的剖视图。
图96(a)所示的开口15151g1、15151g2为沿着法兰15151的圆周方向延伸的槽的形式。在开口15151g1和开口15151g2之间设置开口15151g3。在将联接件15150安装至法兰15151时,销15155被容纳在这些开口15151g1、15151g2中。另外,鼓支承面151510i被容纳在开口15151g3中。
通过上述结构,无论感光鼓107在盒B2中的旋转相位如何(不管销15155在盒B2中的停止位置如何),联接件15150可以在旋转力传递角位置和预接合角位置(或脱离角位置)之间枢转(摆动)。
另外,在图96(a)中,旋转力传递面(旋转力接收件)15151h1、15151h2被设置在开口15151g1或15151g2的顺时针上游。联接件15150的旋转力传递销(旋转力传递部)15155的侧面与旋转力传递面15151h1、15151h2接触。由此,旋转力从联接件15150被传递至感光鼓107。这里,传递面15151h1-15151h2面向法兰15151的旋转运动的圆周方向。由此,传递面15151h1-15151h2向着销15155的侧面被推压。在轴线L1和轴线L2大致同轴的状态下,联接件15150围绕轴线L2旋转。
这里,法兰15151具有传递接收部15151h1、15151h2,并且因此它用作旋转力接收件。
图96(b)中所示的保持部15151i具有将联接件15150保持在法兰15151上的功能,从而联接件能够在旋转力传递角位置和预接合角位置(或脱离角位置)之间枢转。另外,它具有调节联接件15150沿轴线L2的方向的运动的作用。因此,开口15151j具有比支承面15150i的直径更小的直径φD15。因此,通过法兰15151限制联接件的运动。因此,联接件151510不与感光鼓(盒)分离。
正如在图96中已经显示的,联接件15150的驱动部15150b与设置在法兰15151中的凹部接合。
图96(c)是显示了将联接件15150装配至法兰15151的过程的剖视图。
从动部15150a和连接部15150c沿着方向X33插入法兰15151中。另外,沿着箭头X32的方向放置具有支承面15150i的定位件15150p(驱动部15150b)。销15155穿透定位件15150p的固定孔15150g以及连接部15150c的固定孔15150r。由此,定位件15150p被固定至连接部15150c。
图96(d)显示了一剖视图,其显示了联接件15150被固定至法兰15151的过程。
联接件15150沿着X32方向移动,从而支承面15150i被带到与保持部15151i接触或接近。保持部材料15156被沿着箭头X32的方向插入,并且它被固定至法兰15151。在这种安装方法中,联接件15150在相对定位件15150p有游隙(间隙)的情况下被安装至法兰15151。由此,联接件15150能够改变其方向。
类似于突起15150d,期望旋转力传递面15150h1、15150h2径向相对(180度)地设置在相同圆周上。
参照图97和图98,将描述感光鼓单元U3的结构。图97(a)是从驱动侧看时鼓单元的透视图,图97(b)是从非驱动侧看时的透视图。另外,图98是沿图97(a)的S23-S23截取的剖视图。
安装至联接件15150的鼓法兰15151被固定至感光鼓107(圆筒形鼓107a)的一个端侧,使得露出传递部15150a。另外,非驱动侧的鼓法兰152被固定至感光鼓107(圆筒形鼓107a)的另一端侧。所示固定方法是卷边、粘结、焊接等。
在驱动侧由支承件15157支撑并且非驱动侧由鼓支撑销(未示出)支撑的状态下,鼓单元U3被第二框架118以可旋转方式支撑。并且,通过将第一框架单元119安装至第二框架单元120(图94),它们被整体化为处理盒。
附图标记15151c表示齿轮,其具有将由联接件15150从驱动轴180接收的旋转力传递至显影辊110的功能。齿轮15151c与法兰15151整体地成型。
在该实施例中被描述的鼓单元U3包括联接件15150、感光鼓107(圆筒形鼓107a)以及鼓法兰15151。圆筒形鼓107a的外周表面涂覆有感光层107b。另外,鼓单元包括涂覆有感光层107b的感光鼓以及安装至其一端的联接件。联接件的结构并不限制于在该实施例中所描述的结构。例如,它可以具有之前作为联接件的实施例所描述的结构。另外,它也可以是其他结构,只要它具有能提供本发明效果的结构。
这里,如图100所示,联接件15150被安装,使得其轴线L2能够相对于轴线L1沿任何方向倾斜。图100(a1)-(a5)是从驱动轴180看时的视图,并且图100(b1)-(b5)是其透视图。图100(b1)-(b5)是大致整个联接件15150的部分剖开视图,其中为了更好地显示切除了法兰15151的一部分。
在图100(a1)、(b1)中,轴线L2相对于轴线L1同轴地定位。当联接件15150从该状态向上倾斜时,它处于图100(a2)、(b2)所示的状态中。如该图所示,当联接件15150朝着开口15151g倾斜时,销15155沿着开口15151g移动。结果,联接件15150绕着与开口15151g垂直的轴线AX倾斜。
在图100(a3)、(b3)中,联接件15150向右倾斜。如该图所示,当联接件15150沿着开口15151g的正交方向倾斜时,它沿开口15151g旋转。销15155绕着销15155的轴线AY旋转。
联接件15150向左倾斜的状态以及它向下倾斜的状态被显示在图100(a4)、(b4)和100(a5)、(b5)中。由于前面已经描述了旋转轴线AX、AY,所以为简单起见省略对其的描述。
通过围绕旋转轴线AX、AY的旋转的组合,提供了与这些倾斜方向不同的旋转,例如如图100(a1)所示的45度旋转。以这种方式,轴线L2能够相对于轴线L1沿任何方向倾斜。
开口15151g沿着与销15155的突出方向横交的方向延伸。
另外,在法兰(旋转力接收件)15151和联接件15150之间,如图所示设置一间隙。通过该结构,正如之前已经描述的,联接件15150可以沿所有方向枢转。
更具体地说,传递面(旋转力传递部)15151h(15151h1,15151h2)相对于销15155(旋转力传递部)位于操作位置。销15155相对于传递面15151h可以移动。传递面15151h和销15155彼此接合或抵靠。为了实现该运动,在销15155和传递面15155h之间设置间隙。由此,联接件15150可以相对于轴线L1沿所有方向枢转。以这种方式,联接件15150被安装至感光鼓107的端部。
已经提到轴线L2可以相对于轴线L1沿任何方向枢转。然而,联接件15150不是必须在360度的范围内线性枢转至预定角度。这适用于前面实施例中所描述的所有联接件。
在该实施例中,开口15151g沿圆周方向稍微略宽形成。通过这种结构,当轴线L2相对于轴线L1倾斜时,即使在联接件15150不能线性倾斜至预定角度的情况,联接件15150也能通过围绕轴线L2旋转一小角度而倾斜至预定角度,换言之,如必要的话,可以考虑这一点合适地选择沿旋转方向开口15151g的游隙。
以这种方式,联接件15150可以大致沿所有方向枢转。因此,大致在整个圆周上,联接件15150可以相对于法兰15151旋转。
正如之前已经描述的(图98),联接件15150的球形面15150i与保持部(凹部的一部分)15151i接触。因此,球形面15150i的中心P2与旋转轴线对准,并且联接件15150被安装。更具体地说,无论法兰15151的相位如何,联接件15150的轴线L2均可以枢转。
另外,为了联接件15150与驱动轴180接合,在接合之前,轴线L2相对于轴线L1关于盒B2的安装方向朝着下游倾斜。更具体地说,如图101所示,轴线L2相对于轴线L1倾斜,从而从动部15150a相对于安装方向X4在下游。在图101(a)-(c)中,在任何情况下,从动部15150a的位置相对于安装方向X4在下游。
图94显示了轴线L2相对于轴线L1倾斜的状态。另外,图98是沿着图94的S24-S24截取的剖视图。如图99所示,通过上述结构,能够从轴线L2倾斜的状态改变到与轴线L1大致平行的状态。另外,轴线L1和轴线L2之间的最大可能倾斜角α4(图99)是在倾斜到从动部15150a或联接件部15150c与法兰15151或支承件15157接触时的位置。该倾斜角是在盒相对于设备主组件安装和拆卸时联接件相对驱动轴接合和脱离所需的值。
在盒B就要被设置在设备主组件A的预定位置之前或与之同时,联接件15150和驱动轴180彼此接合。参照图102和图103,将描述该联接件15150的接合操作。图102是显示了驱动轴的主要部件和盒的驱动侧的透视图。图103是从设备主组件的下部看时的纵向剖视图。
在安装盒B的过程中,如图102所示,盒B沿着与轴线L3大致垂直的方向(箭头X4的方向)被安装到设备主组件A中。联接件15150的轴线L2事先相对于轴线L1关于安装方向X4向下游倾斜(预接合角位置)(图102(a),图103(a))。通过联接件15150的所述倾斜,相对于轴线L1的方向,自由端位置15150A1比轴自由端180b3相对于轴线L1的方向更接近感光鼓107。另外,相对于轴线L1的方向,自由端位置15150A2比轴自由端180b3更接近销182(图103(a))。
首先,自由端位置15150A1从驱动轴自由端180b3旁边经过。随后,圆锥形的驱动轴接收面150f或从动突起150d与驱动轴180的自由端部180b或旋转力驱动传递销182接触。这里,接收面150f和/或突起150d是盒侧的接触部。另外,自由端部180b和/或销182是主组件侧的接合部。响应于盒B的这种运动,联接件15150的轴线L2变得与轴线L1大致同轴(图103(c))。当盒B的位置相对于设备主组件A被最终确定时,驱动轴180和感光鼓107大致同轴。更具体地说,在盒侧接触部与主组件侧接合部接触时,响应于盒B朝着设备主组件A的后侧的插入,联接件15150从预接合角位置枢转至旋转力传递角位置,使得轴线L2变得与轴线L1大致同轴。联接件15150和驱动轴180彼此接合(图102(b),图103(d))。
正如之前已经描述的,联接件15150被安装以进行相对于轴线L1的倾斜运动。并且它能够相应于盒B的安装操作通过联接件15150的枢转与驱动轴180接合。
另外,类似于第一实施例,不管驱动轴180和联接件15150的相位如何,均能执行上面描述的联接件15150的接合操作。
以这种方式,根据本实施例,联接件15150被安装成能够大致围绕轴线L1旋转或回转(摆动)。图103中所示运动可以包括回转运动。
参照图104,将描述在使感光鼓107旋转时的旋转力传递操作。通过从电机186所接收的旋转力,驱动轴180与鼓驱动齿轮181一起沿着图中X8方向旋转。齿轮181是斜齿轮并且其直径大约是80mm。与驱动轴180成为一体的销182与联接件15150的任何两个接收面150e(四处)(旋转力接收部)接触。通过销182推压接收面150e而旋转联接件15150。另外,在联接件15150中,旋转力传递销15155(联接件侧接合部,旋转力传递部)与旋转力传递面(旋转力接收件)15151h1、15151h2接触。由此,联接件15150与感光鼓107联接以传递驱动力。因此,通过联接件15150的旋转,感光鼓107借助法兰15151旋转。
另外,当轴线L1和轴线L2偏离一个小角度时,联接件15150倾斜一点。由此,联接件15150能够旋转,而不会向感光鼓107和驱动轴180施加大的载荷。因此,在装配驱动轴180和感光鼓107时,不需要精确调节。因此,能够降低制造成本。
参照图105,将描述在从设备主组件A取出处理盒B2时联接件15150的拆卸操作。图105是从设备主组件的下部看时的纵向剖视图。如图105所示,当盒B被从设备主组件A拆卸时,它沿着与轴线L3大致垂直的方向(箭头X6的方向)移动。首先,类似于第一实施例,在拆卸盒B2时,驱动轴180的驱动传递销182被定位在待用部分15150k1-15150k4的任何两个中(图)。
在感光鼓107的驱动停止之后,联接件15150处于旋转力传递角位置,其中轴线L2与轴线L1大致同轴。当盒B朝着设备主组件A的前侧(拆卸方向X6)移动时,感光鼓107朝着前侧移动。响应于该移动,联接件15150的位于相对于拆卸方向的上游的轴接收面15150f或突起15150d至少与驱动轴180的自由端部180b接触(图105a)。轴线L2开始(图105(b))相对于拆卸方向X6朝上游倾斜。该倾斜方向与安装盒B时联接件15150的倾斜相同。通过盒B的拆卸操作,在相对于拆卸方向X6的上游自由端部15150A3与自由端部180b接触的同时,盒B移动。联接件15150倾斜直至上游自由端部15150A3到达驱动轴自由端180b3(图105(c))。在这种情况下联接件15150的角位置是脱离角位置。在这种情况下,联接件15150从驱动轴自由端180b3旁边经过,与驱动轴自由端180b3接触(图105(d))。随后,从设备主组件A中取出盒B2。
正如之前已经描述的,联接件15150被安装以相对于轴线L1进行枢转运动。通过联接件15150相应于盒B2的拆卸操作进行枢转,联接件15150能够从驱动轴180上脱离。
图105所示的运动可以包括回转运动。
通过上述结构,联接件是作为感光鼓单元的感光鼓的整体部分。因此,在装配时,处理是容易的并且改进了装配性能。
为了在联接件15150与驱动轴180就要接合之前使轴线L2向预接合角位置倾斜,可以使用第三实施例-第九实施例中的任何一个结构。
另外,在该实施例中,已经描述了驱动侧的鼓法兰是与感光鼓的分离件。然而,本发明并不限制于这个例子。换言之,旋转力接收部可以被直接设置在圆筒形鼓上,而不是在鼓法兰上。
[第十八实施例]
参照图106、图107和图108,将描述本发明的第十八实施例。
本实施例是在第十七实施例中所描述的联接件的改型例子。驱动侧的鼓法兰和保持件的构造不同于第十七实施例。在任何情况下,无论感光鼓的相位如何,联接件均可以沿预定方向枢转。另外,下面将要描述的用于将感光鼓单元安装至第二框架的结构与前面实施例的相同,因此不再描述。
图106(a)和(b)显示了感光鼓单元的第一改型例子。在图106(a)和(b)中,由于感光鼓和非驱动侧鼓法兰与第十六实施例的相同,所有这些没有被显示。
更具体地说,联接件16150设有由销155穿过的环形支撑部16150p。支撑部16150p的外围部的边缘线16150p1、16150p2与销155的轴线等距。
鼓法兰(旋转力接收件)16151的内周界构成球形面部16151i(凹部)。球形面部16151i的中心被设置在销155的轴线上。另外,设置狭缝16151u并且这是沿轴线L1的方向延伸的孔。通过设置该孔,当轴线L2倾斜时,销155不受干涉。
另外,在从动部16150a与支撑部16150p之间设置保持件16156。与支撑部16150p相对的部分设有球形面部16156a。这里,球形面部16156a与球形面部16151i同心。另外,设置狭缝16156u,使得它沿着轴线L1的方向与狭缝16151u连续。因此,当轴线L1枢转时,销155能够移动到狭缝16151u、16156u的内侧。
用于这些驱动侧结构的鼓法兰、联接件和保持件被安装至感光鼓。由此,构成感光鼓单元。
通过上述结构,当轴线L2倾斜时,支撑部16150p的边缘线16150p1、16150p2沿着球形面部16151i和球形面部16156a移动。由此,类似于前面的实施例,联接件16150能够确定地倾斜。
以这种方式,支撑部16150p可以相对于球形面部16151i枢转,也就是说,在凸缘16151和联接件16150之间设有合适的间隙,使得联接件16150是可以摆动的。
因此,提供了与第十七实施例中所描述的效果类似的效果。
图107(a)和(b)显示了感光鼓单元的第二改型例子。在图107(a)和(b)中,由于感光鼓和非驱动侧鼓法兰与第十七实施例的相同,所有省略了说明。
更具体地说,类似于第十七实施例,联接件17150设有球形支撑部17150p,其大致以销155的轴线与轴线L2之间的交点作为中心。
鼓法兰17151设有圆锥部17151i(凹部),其接触支撑部17150p的表面。
另外,保持件17156被设置在从动部17150a和支撑部17150p之间。另外,边缘线部17156a与支撑部17150p的表面接触。
该驱动侧的结构(鼓法兰、联接件和保持件)被安装至感光鼓。由此,构成感光鼓单元。
通过上述结构,当轴线L2倾斜时,支撑部17150p变得沿着圆锥部17151i和保持件的边缘线17156a可移动。由此,能够确定地倾斜联接件17150。
如上所述,支撑部17150p可以相对于圆锥部17151i枢转(摆动)。在凸缘17151和联接件17150之间,设置间隙以便允许枢转该联接件17150。因此,提供与第十七实施例所述效果类似的效果。
图108(a)和(b)显示了感光鼓单元U7的第三改型例子。在图108(a)和(b)的改型例子中,感光鼓和非驱动侧鼓法兰与第十七实施例的相同,并且因此不再说明。
更具体地说,它们与销20155的旋转轴线同轴地设置。另外,联接件20150具有与轴线L2垂直的平坦表面部20150r。另外,它设有半球形支撑部20150p,其大致以销20155的轴线与轴线L2之间的交点作为中心。
凸缘20151设有圆锥部20151i,在其轴线上具有顶点20151g。顶点20151g与联接件的平坦表面部20150r接触。
另外,在从动部20150a与支撑部20150p之间设置保持件20156。另外,边缘线部20156a与支撑部20150p的表面接触。
驱动侧的结构(鼓法兰、联接件和保持件)被安装至感光鼓。由此,构成感光鼓单元。
通过上述结构,即使轴线L2倾斜,联接件20151和法兰20151也总是大致在一点彼此接触。因此,联接件20150能够确定地倾斜。
如上所述,联接件的平坦表面部20150r相对于圆锥部20151i可以摆动。在法兰20151与联接件20150之间,设置一间隙以便允许联接件17150的摆动。
通过以这种方式构造感光鼓单元,能够提供上述效果。
作为用于向预接合角位置倾斜联接件的装置,可以使用第三-第九实施例的任意一个结构。
[第十九实施例]
参照图109、图110和图111,将描述本发明的第十九实施例。
本实施例与第一实施例的不同之处在于感光鼓的安装结构以及从联接件到感光鼓的旋转力传递结构。
图109是显示了驱动轴和联接件的透视图。图111是从驱动侧看时第二框架单元的透视图。图110是沿图111的S20-S20线截取的剖视图。
在该实施例中,感光鼓107由鼓轴18153支撑,所述鼓轴18153从第二框架18118的驱动侧延伸至其非驱动侧。由此,能够进一步准确地确定感光鼓107的位置。将更详细地对此进行描述。
在感光鼓107的相对两端,鼓轴(旋转力接收件)18153支撑法兰18151和18152的定位孔18151g、18152g。另外,鼓轴18153通过驱动传递部18153c与感光鼓107整体地旋转。而且,鼓轴18153通过在其相对两端附近的支承件18158和18159由第二框架18118以可旋转方式支撑。
鼓轴18153的自由端部18153b具有与关于第一实施例所描述的构造相同的构造。更具体地说,自由端部18153b具有球形面并且联接件150的鼓支承面150f可以沿着所述球形面滑动。通过这样做,轴线L2可以相对于轴线L1沿任何方向枢转。另外,通过鼓支承件18157防止联接件150的脱离。通过连接第一框架单元(未示出)和第二框架18118,它们被结合为处理盒。
旋转力通过销(旋转力接收件)从联接件150传递至感光鼓107。销18155通过鼓轴的自由端部(球形面)的中心。
另外,通过鼓支承件18157防止联接件150脱离。
与盒的安装和拆卸操作相关联的盒与设备主组件之间的接合和脱离与第一实施例相同,因此不再描述。
至于用于朝着预接合角位置倾斜轴线L2的结构,可以使用第三实施例-第十实施例的结构的任何一个。
另外,能够使用在第一实施例中所描述的鼓轴自由端处的构造。
另外,正如关于第一实施例所描述的(图31),通过鼓支承件调节联接件相对于盒的倾斜方向。由此,联接件能够更加确定地与驱动轴接合。
所述结构没有什么限制,只要旋转力接收部设置于感光鼓的端部,并且它与感光鼓整体地旋转即可。例如,正如关于第一实施例所描述的,它可以被设置在位于感光鼓(圆筒形鼓)的端部的鼓轴上。或者,正如在该实施例中已经描述的,它可以被设置在通过感光鼓(圆筒形鼓)的鼓穿透轴的端部。另外替换性地,正如关于第十七实施例所描述的,它可以被设置在位于感光鼓(圆筒形鼓)的端部的鼓法兰上。
驱动轴和联接件之间的接合(连接)意味着联接件与驱动轴和/或旋转力施加部相抵靠或接触的状态。另外,它意味着当驱动轴开始旋转时,联接件抵靠或接触旋转力施加部并且能够从驱动轴接收旋转力。
在上述实施例中,至于联接件中附图标记的字母后缀,相同的字母后缀被指定给具有相应功能的元件。
图112是根据本发明实施例的感光鼓单元U的透视图。
在图中,感光鼓107在具有联接件150的端部设有斜齿轮。斜齿轮107c将联接件150从设备主组件A接收的旋转力传递至显影辊(处理装置)110。该结构适用于图97所示的鼓单元U3。
另外,感光鼓107在与具有斜齿轮107c的端部相对的端部设有齿轮107d。在该实施例中,该齿轮107d是斜齿轮。齿轮107d将联接件150从设备主组件A接收的旋转力传递至设置在设备主组件A中的显影辊104(图4)。
另外,充电辊(处理装置)108在纵向范围上与感光鼓107接触。由此,充电辊108与感光鼓107一起旋转。转印辊104在其纵向范围上可以与感光鼓107接触。由此,转印辊104可以通过感光鼓107旋转。在这种情况下,用于旋转转印辊104的齿轮是不必要的。
另外,如图98所示,感光鼓107在具有联接件15150的端部设有斜齿轮15151c。齿轮15151c将联接件15150从设备主组件A接收的旋转力传递至显影辊110,并且相对于感光鼓107的轴线L1的方向,设置齿轮15151c的位置与设置旋转力传递销(旋转力传递部)15150h1、h2的位置相对彼此交叠(所示交叠位置在图98中由3显示)。
以这种方式,齿轮15151c和旋转力传递部相对于轴线L1的方向相对彼此交叠。由此,减小了趋于使盒框架B1变形的力。另外,能够减小感光鼓107的长度。
上述实施例的联接件能够应用于该鼓单元。
上述每个联接件具有下述结构。
联接件(例如,联接件150、1550、1750和1850、3150、4150、5150、6150、7150、8150、1350、1450、11150、12150、12250、12350、13150、14150、15150、16150、17150、20150、21150等等)与设置在设备主组件A中的旋转力施加部(例如,销182、1280、1355、1282、9182等等)接合。联接件接收用于旋转感光鼓107的旋转力。另外,每个联接件可以在旋转力传递角位置与脱离角位置之间枢转,所述旋转力传递角位置用于通过与旋转力施加部接合而将用于旋转感光鼓107的旋转力传递至感光鼓107,所示脱离角位置从旋转力传递角位置沿着远离感光鼓107的轴线L1的方向倾斜。另外,在沿着大致垂直于轴线L1的方向从设备主组件A拆卸盒B时,联接件从旋转力传递角位置枢转至脱离角位置。
如前面所描述的,旋转力传递角位置和脱离角位置可以彼此相同或相当。
另外,在将盒B安装至设备主组件A时,操作如下。响应于沿着大致垂直于轴线L1的方向安装盒B,联接件从预接合角位置枢转至旋转力传递角位置,从而允许联接件的相对于盒B安装至设备主组件A的方向定位在下游的部分(例如,在下游自由端位置A1处的部分)从驱动轴旁边经过。联接件定位在旋转力传递角位置。
“大致垂直”的含义之前已经解释过了。
联接件具有凹部(例如150z、12150z、12250z、14150z、15150z、21150z),联接件的旋转轴线L2延伸通过限定该凹部的形状的中心。在联接件定位在旋转力传递角位置的状态下,凹部覆盖驱动轴(例如180、1180、1280、1380和9180)的自由端。旋转力接收部(例如旋转力接收面150e、9150e、12350e、14150e、15150e)沿着垂直于轴线L3的方向从邻近驱动轴的部分突出并且可以沿着联接件的旋转方向与旋转力施加部接合或抵靠。通过这样做,联接件从驱动轴接收旋转力,从而旋转。当从电子照相成像设备的主组件拆卸处理盒时,响应于处理盒沿着大致垂直于电子照相感光鼓的轴线的方向的移动,联接件从旋转力传递角位置枢转至脱离角位置,使得联接件的所述部分(相对于拆卸方向的上游端部150A3、1750A3、14150A3、15150A3)从驱动轴旁边经过。通过这样做,联接件与驱动轴脱离。
多个这样的旋转力接收部在大致彼此径向相对的位置处被设置在假想圆C1(图8(d),图95(d))上,所述假想圆具有位于联接件的旋转轴线上的中心O(图8(d),图95(d))。
联接件的凹部具有扩张部(例如,图8、29、33、34、36、47、51、54、60、63、69、72、82、83、90、91、92、93、106、107、108)。多个旋转力接收部沿着联接件的旋转方向以规则间隔设置。旋转力施加部(例如182a、182b)在两个位置的每一个处突出并且沿着与驱动轴的轴线垂直的方向延伸。旋转力接收部的其中一个与两个旋转力施加部的其中一个相接合。与旋转力接收部的其中一个相对的旋转力接收部的另一个与两个旋转力施加部的另一个相接合。通过这样做,联接件从驱动轴接收旋转力以便旋转。通过这种结构,旋转力能够通过联接件被传递至感光鼓。
扩张部具有圆锥形状。所述圆锥形状具有位于联接件的旋转轴线上的顶点,并且在联接件定位在旋转力传递角位置的状态下,顶点与驱动轴的自由端相对。当旋转力被传递至联接件时,联接件覆盖驱动轴的自由端。通过这种结构,联接件能够与在设备主组件中突出的驱动轴接合(连接),并且相对于轴线L2的方向交叠。因此,联接件能够稳定地与驱动轴接合。
联接件的自由端部覆盖驱动轴的自由端。因此,联接件可以容易地与驱动轴脱离。联接件能够以高精度从驱动轴接收旋转力。
具有扩张部的联接件以及因此驱动轴可以是圆筒形的。因此,驱动轴的机加工是容易的。
联接件具有圆锥形的扩张部,使得能够增强上述效果。
当联接件位于旋转力传递角位置时,轴线L2和轴线L1大致同轴。在联接件定位在脱离角位置的状态下,联接件的旋转轴线相对于电子照相感光鼓的轴线倾斜以便允许联接件的在使处理盒从电子照相成像设备的主组件拆卸的移除方向上的上游部从驱动轴的自由端旁边经过。联接件包括用于将旋转力传递至电子照相感光鼓的旋转力传递部(例如,150h、1550h、9150h、14150h、15150h)以及位于旋转力接收部和旋转力传递部之间的连接部(例如,7150c),其中所述旋转力接收部、连接部、旋转力传递部沿着旋转轴线方向布置。当处理盒沿着与驱动轴大致垂直的方向移动时,通过与设置在电子照相成像设备主组件中的一固定部(引导肋(接触部)7130R1a)接触的连接部而提供预接合角位置。
盒B包括用于将联接件保持在预接合角位置的保持件(锁定件3159、压迫件4159a、4159b、锁定件5157k、磁性件8159),其中所述联接件通过保持件所施加的力被保持在预接合角位置。联接件通过保持件的力被定位在预接合角位置。保持件可以是弹性件(压迫件4159a、4159b)。通过弹性件的弹力,联接件被保持在接合角位置。保持件可以是摩擦件(锁定件3159)。通过摩擦件的摩擦力,联接件被保持在接合角位置。保持件可以是锁定件(锁定件5157k)。保持件可以是设置在联接件上的磁性件(磁性部8159)。通过磁性件的磁力,联接件被保持在接合角位置。
旋转力接收部与和驱动轴整体地旋转的旋转力施加部接合。旋转力接收部可以与和驱动轴整体地旋转的旋转力施加部接合,其中当旋转力接收部接收用于旋转联接件的驱动力时,旋转力接收部朝着驱动轴沿着接收力的方向倾斜。通过吸引力,确保了联接件接触驱动轴的自由端。然后,相对于驱动轴关于轴线L2的联接件的位置。当感光鼓107也被吸引时,感光鼓107的位置相对于轴线L1的方向关于设备主组件被确定。通过本领域的普通技术人员可以适当地设定拉力。
联接件被设置在电子照相感光鼓的一端并且能够大致沿所有方向相对于电子照相感光鼓的轴线倾斜。通过这样做,联接件能够在预接合角位置与旋转力传递角位置之间以及在旋转力传递角位置与脱离角位置之间平稳地枢转。
“大致所有方向”旨在表示无论旋转力施加部停止的相位如何,联接件均能够枢转至旋转力传递角位置。
另外,无论旋转力施加部停止的相位如何,联接件均能够枢转至脱离角位置。
在旋转力传递部(例如150h、1550h、9150h、14150h、15150h)和旋转力接收件(例如销155、1355、9155、13155、15155、15151h)之间设置有间隙,使得联接件能够大致沿所有方向相对于电子照相感光鼓的轴线倾斜,其中旋转力传递部被设置在电子照相感光鼓的一端并且可以相对于旋转力接收件移动,并且旋转力传递部和旋转力接收件可以沿着联接件的旋转方向彼此接合。联接件以这种方式被安装至鼓的端部。联接件能够相对于轴线L1大致沿所有方向倾斜。
电子照相成像设备主组件包括可以在压迫位置与从压迫位置回缩的回缩位置之间移动的压迫件(例如,滑动件1131)。当处理盒被安装至电子照相成像设备的主组件时,联接件通过被压迫件的弹力压迫而移至预接合角位置,所述压迫件在通过被处理盒接触临时回缩到回缩位置之后恢复到压迫位置。通过该结构,即使连接部由于摩擦被阻止,联接件也能确定地枢转至预接合角位置。
感光鼓单元包括以下结构。沿着与驱动轴的轴向方向大致垂直的方向,感光鼓单元(U、U1、U3、U7、U13)被安装至电子照相成像设备的主组件并从主组件拆卸。所述鼓单元具有电子照相感光鼓,在所述感光鼓的外周表面上具有感光层(107b),所述电子照相感光鼓可以围绕其轴线旋转。它还包括一联接件,用于与旋转力施加部接合以及用于接收用于旋转感光鼓107的旋转力。联接件可以具有前面描述的结构。
鼓单元被安装到盒中。通过将盒安装至设备主组件,鼓单元可以被安装至设备主组件。
盒(B、B2)具有以下结构。
盒可以沿着与驱动轴的轴向方向大致垂直的方向被安装至设备主组件并从主组件拆卸。盒包括鼓,在鼓的外周表面上具有感光层(107b),电子照相感光鼓可以围绕其轴线旋转。它进一步包括可作用在感光鼓107上的处理装置(例如,清洁刮刀117a、充电辊108、显影辊100)。它进一步包括用于通过与旋转力施加部接合而接收用于旋转鼓107的旋转力的联接件。所述联接件可以具有前面所描述的结构。
电子照相成像设备可以安装所述鼓单元。
电子照相成像设备可以安装所述处理盒。
轴线L1是感光鼓的旋转轴线。
轴线L2是联接件的旋转轴线。
轴线L3是驱动轴的旋转轴线。
“回转”运动不是联接件自身围绕轴线L2旋转的运动,而是倾斜的轴线L2围绕感光鼓的轴线L1旋转,不过回转在这里不排除联接件自身围绕联接件150的轴线L2的旋转。
[其它实施例]
在上述实施例中,安装和拆卸路径相对于设备主组件的驱动轴沿着倾斜或非倾斜的上下方向延伸。然而,本发明并不限制于这些例子。例如,所述实施例可以合适地应用于以下处理盒:所述处理盒根据设备主组件的结构能够沿着与驱动轴垂直的方向被安装及拆卸。
另外,在上述实施例中,虽然安装路径相对于设备主组件是直线的,但是本发明并不限制于这个例子。例如,安装路径可以是直线段的组合,或者它可以是曲线路径。
另外,上述实施例的盒形成单色图像。然而,上述实施例能够被合适地应用于通过多个显影装置形成多色(例如,双色图像、三色图像或全色等)图像的盒。
另外,例如上述处理盒包括电子照相感光件以及至少一个处理装置。因此,处理盒可以整体地包含感光鼓和作为处理装置的充电装置。处理盒可以整体地包含感光鼓和作为处理装置的显影装置。处理盒可以整体地包含感光鼓和作为处理装置的清洁装置。另外,处理盒可以整体地包含感光鼓和两个或多个处理装置。
另外,通过使用者将处理盒相对于设备主组件安装和拆卸。因此,通过使用者有效地执行设备主组件的维护。根据上述实施例,相对于未设置用来使用于将旋转力传递至感光鼓的主组件侧鼓联接件沿轴向方向移动的机构的设备主组件,处理盒也可以沿着大致垂直于驱动轴的轴线的方向以可拆卸方式安装。感光鼓能够平稳地旋转。另外,根据上述实施例,能够沿着与驱动轴的轴线大致垂直的方向从设有驱动轴的电子照相成像设备的主组件拆卸处理盒。
另外,根据上述实施例,能够沿着与驱动轴的轴线大致垂直的方向将处理盒安装至设有驱动轴的电子照相成像设备。另外,根据上述实施例,可以相对于设有驱动轴的电子照相成像设备的主组件沿着与驱动轴的轴线大致垂直的方向安装及拆卸处理盒。
另外,根据上述联接件,即使它不使设置在主组件中的驱动齿轮沿着其轴向方向移动,它们也可以通过处理盒沿着与驱动轴的轴线大致垂直的方向的移动而相对设备主组件安装和拆卸。
另外,根据上述实施例,在位于主组件与盒之间的驱动连接部中,与齿轮之间接合的情况相比,感光鼓能够平稳地旋转。
另外,根据上述实施例,可以沿着与设置在主组件中的驱动轴的轴线大致垂直的方向以可拆卸方式安装处理盒,并且同时处理盒能够平稳地旋转。
另外,根据上述实施例,可以沿着与设置在主组件中的驱动轴的轴线大致垂直的方向以可拆卸方式安装处理盒,并且同时能够进行感光鼓的平稳旋转。
[工业适用性]
正如之前已经描述的,在本发明中,鼓联接件的轴线能够相对于感光鼓的轴线进入不同的角位置。通过该结构,鼓联接件能够沿着与设置在主组件中的驱动轴的轴线大致垂直的方向与驱动轴接合。另外,鼓联接件能够沿着与驱动轴的轴线大致垂直的方向与驱动轴脱离。本发明能够应用于处理盒、电子照相感光鼓单元、旋转力传递部(鼓联接件)以及电子照相成像设备。
虽然已经参照在此披露的结构描述了本发明,但是它并不限制于所阐述的细节,并且该申请旨在覆盖落入改进目的或以下权利要求书的范围之内的所有那些改型或改变。
Claims (57)
1.一种用于电子照相成像设备的主组件的电子照相感光鼓的旋转力传递部件,其中,所述电子照相成像设备的所述主组件包括驱动轴,所述驱动轴待由电机驱动并且具有旋转力施加部,其中所述电子照相感光鼓能够沿着与驱动轴的轴向方向大致垂直的方向从所述电子照相成像设备的主组件拆卸,所述旋转力传递部件包括:
联接件,其在所述电子照相感光鼓安装至所述电子照相成像设备的所述主组件的状态下能够与所述旋转力施加部接合以便接收用于旋转所述电子照相感光鼓的旋转力,其中,所述联接件能够进入用于将用于旋转所述电子照相感光鼓的旋转力传递至所述电子照相感光鼓的旋转力传递角位置;并且所述联接件能够从所述旋转力传递角位置进入脱离角位置,在所述脱离角位置,所述联接件远离所述电子照相感光鼓的轴线倾斜,
其中,当沿着与所述电子照相感光鼓的轴线大致垂直的方向从电子照相成像设备的主组件拆卸所述处理盒时,所述联接件从所述旋转力传递角位置移至所述脱离角位置。
2.根据权利要求1的旋转力传递部件,其中,所述联接件具有凹部,所述联接件的旋转轴线在所述凹部中延伸,并且在所述联接件定位在所述旋转力传递角位置的状态下,所述凹部覆盖所述驱动轴的自由端,其中所述联接件通过与所述旋转力施加部接合而借助旋转力沿着所述联接件的旋转方向旋转,所述旋转力施加部邻近所述驱动轴的自由端沿着与驱动轴的轴线大致垂直的方向突出,其中,当从电子照相成像设备的主组件拆卸所述处理盒时,响应于所述处理盒沿着与所述电子照相感光鼓的轴线大致垂直的方向的运动,所述联接件从所述旋转力传递角位置枢转至所述脱离角位置,使得所述联接件的一部分从驱动轴旁边绕过。
3.根据权利要求1或2的旋转力传递部件,其中,多个这样的旋转力接收部设置在中心位于所述联接件的旋转轴线上的一假想圆上,且处于彼此大致径向相对的位置处。
4.根据权利要求2的旋转力传递部件,其中,所述凹部包括朝着它的自由端扩张的扩张部,并且多个所述旋转力接收部沿着所述联接件的旋转方向以规则间隔设置,其中在相对于驱动轴的轴线彼此径向相对的两个位置的每一个位置处均设置有所述旋转力施加部,并且
其中,通过所述旋转力接收部中的一个与旋转力施加部中的一个接合以及通过旋转力接收部中的另一个与旋转力施加部中的另一个接合,所述联接件从驱动轴接收旋转力以便旋转;其中,所述旋转力接收部中的所述一个与所述旋转力接收部中的所述另一个相对,并且所述旋转力施加部中的所述一个与所述旋转力施加部中的所述另一个相对。
5.根据权利要求4的旋转力传递部件,其中,所述扩张部具有圆锥形状,所述圆锥形状具有位于所述联接件的旋转轴线上的顶点,其中,在联接件定位在所述旋转力传递角位置的状态下,所述顶点与驱动轴的自由端相对,并且当旋转力被传递至所述联接件时,所述联接件覆盖驱动轴的自由端,并且所述旋转力接收部沿着所述联接件的旋转方向以规则间隔设置。
6.根据权利要求1、2、4或5的旋转力传递部件,其中,在联接件定位在所述旋转力传递角位置的状态下,所述联接件的旋转轴线与所述电子照相感光鼓的轴线大致同轴;其中,在联接件定位在所述脱离角位置的状态下,所述联接件的旋转轴线相对于所述电子照相感光鼓的轴线倾斜,以便允许所述联接件的在所述处理盒从电子照相成像设备主组件拆卸的移除方向上的上游部从所述驱动轴的自由端旁边经过。
7.一种用于电子照相成像设备的主组件的电子照相感光鼓的旋转力传递部件,其中,所述电子照相成像设备的所述主组件包括驱动轴,所述驱动轴待由电机驱动并且具有旋转力施加部,其中所述电子照相感光鼓能够沿着与驱动轴的轴向方向大致垂直的方向从所述电子照相成像设备的主组件拆卸,所述旋转力传递部件包括:
能够与所述旋转力施加部接合以便接收用于旋转所述电子照相感光鼓的旋转力的联接件,所述联接件能够进入用于将用于旋转所述电子照相感光鼓的旋转力传递至所述电子照相感光鼓的旋转力传递角位置;并且所述联接件能够从所述旋转力传递角位置进入脱离角位置,在所述脱离角位置,所述联接件远离所述电子照相感光鼓的轴线倾斜,
其中,在所述处理盒被安装至电子照相成像设备的主组件的状态下,当沿着与处理盒从电子照相成像设备的主组件拆卸的移除方向相反的方向看时,所述联接件的一部分位于所述驱动轴的后方,其中,当所述处理盒从电子照相成像设备的主组件拆卸时,通过所述联接件从旋转力传递角位置移至脱离角位置,所述联接件与驱动轴脱离,以允许联接件的所述一部分从所述驱动轴旁边绕过。
8.根据权利要求7的旋转力传递部件,其中,所述联接件具有凹部,所述联接件的旋转轴线在所述凹部中延伸,并且在所述联接件定位在所述旋转力传递角位置的状态下,所述凹部覆盖所述驱动轴的自由端,其中所述联接件通过与所述旋转力施加部接合而借助旋转力沿着所述联接件的旋转方向旋转,所述旋转力施加部邻近所述驱动轴的自由端沿着与驱动轴的轴线大致垂直的方向突出。
9.根据权利要求8所述的旋转力传递部件,其中,多个这样的旋转力接收部设置在中心位于所述联接件的旋转轴线上的一假想圆上,且处于彼此大致径向相对的位置处。
10.根据权利要求8所述的旋转力传递部件,其中,所述凹部包括朝着它的自由端扩张的扩张部,并且多个所述旋转力接收部沿着所述联接件的旋转方向以规则间隔设置,其中在相对于驱动轴的轴线彼此径向相对的两个位置的每一个位置处均设置有所述旋转力施加部,并且
其中,通过所述旋转力接收部中的一个与旋转力施加部中的一个接合以及通过旋转力接收部中的另一个与旋转力施加部中的另一个接合,所述联接件从驱动轴接收旋转力以便旋转;其中,所述旋转力接收部中的所述一个与所述旋转力接收部中的所述另一个相对,并且所述旋转力施加部中的所述一个与所述旋转力施加部中的所述另一个相对。
11.根据权利要求10所述的旋转力传递部件,其中,所述扩张部具有圆锥形状,所述圆锥形状具有位于所述联接件的旋转轴线上的顶点,其中,在联接件定位在所述旋转力传递角位置的状态下,所述顶点与驱动轴的自由端相对,并且当旋转力被传递至所述联接件时,所述联接件覆盖驱动轴的自由端,并且所述旋转力接收部沿着所述联接件的旋转方向以规则间隔设置。
12.根据权利要求10或11所述的旋转力传递部件,其中,在联接件定位在所述旋转力传递角位置的状态下,所述联接件的旋转轴线与所述电子照相感光鼓的轴线大致同轴;其中,在联接件定位在所述脱离角位置的状态下,所述联接件的旋转轴线相对于所述电子照相感光鼓的轴线倾斜,以便允许所述联接件的在所述处理盒从电子照相成像设备主组件拆卸的移除方向上的上游部从所述驱动轴的自由端旁边经过。
13.一种用于电子照相成像设备的主组件的电子照相感光鼓的旋转力传递部件,其中,所述电子照相成像设备的所述主组件包括驱动轴,所述驱动轴待由电机驱动并且具有旋转力施加部,其中所述电子照相感光鼓能够沿着与驱动轴的轴向方向大致垂直的方向从所述电子照相成像设备的主组件拆卸,所述旋转力传递部件包括:
用于将旋转力传递至所述电子照相感光鼓的联接件,所述联接件包括用于与旋转力施加部接合以便从驱动轴接收旋转力的旋转力接收部,以及用于将通过所述旋转力接收部接收的旋转力传递至所述电子照相感光鼓的旋转力传递部,所述联接件能够进入用于将用于旋转所述电子照相感光鼓的旋转力传递至所述电子照相感光鼓的旋转力传递角位置;并且所述联接件能够从所述旋转力传递角位置进入脱离角位置,在所述脱离角位置,所述联接件远离所述电子照相感光鼓的轴线倾斜;
用于从所述旋转力传递部接收旋转力以便旋转所述电子照相感光鼓的旋转力接收件,
其中,当从电子照相成像设备的主组件拆卸所述处理盒时,通过响应于所述处理盒沿着与所述电子照相感光鼓的轴线大致垂直的方向的运动从所述旋转力传递角位置移动至所述脱离角位置,所述联接件与所述驱动轴脱离。
14.根据权利要求13所述的旋转力传递部件,其中,所述联接件具有凹部,所述联接件的旋转轴线在所述凹部中延伸,并且在所述联接件定位在所述旋转力传递角位置的状态下,所述凹部覆盖所述驱动轴的自由端,其中所述联接件通过与所述旋转力施加部接合而接收沿所述联接件的旋转方向的旋转力,所述旋转力施加部邻近所述驱动轴的自由端沿着与驱动轴的轴线大致垂直的方向突出,其中,当从电子照相成像设备的主组件拆卸所述处理盒时,响应于所述处理盒沿着与所述电子照相感光鼓的轴线大致垂直的方向的运动,所述联接件从所述旋转力传递角位置枢转至所述脱离角位置,使得所述联接件的一部分从驱动轴旁边绕过。
15.根据权利要求13或14所述的旋转力传递部件,其中,多个这样的旋转力接收部设置在中心位于所述联接件的旋转轴线上的一假想圆上,且处于彼此大致径向相对的位置处。
16.根据权利要求14所述的旋转力传递部件,其中,所述凹部包括朝着它的自由端扩张的扩张部,并且多个所述旋转力接收部沿着所述联接件的旋转方向以规则间隔设置,其中在相对于驱动轴的轴线彼此径向相对的两个位置的每一个位置处均设置有所述旋转力施加部,并且
其中,通过所述旋转力接收部中的一个与旋转力施加部中的一个接合以及通过旋转力接收部中的另一个与旋转力施加部中的另一个接合,所述联接件从驱动轴接收旋转力以便旋转;其中,所述旋转力接收部中的所述一个与所述旋转力接收部中的所述另一个相对,并且所述旋转力施加部中的所述一个与所述旋转力施加部中的所述另一个相对。
17.根据权利要求16所述的旋转力传递部件,其中,所述扩张部具有圆锥形状,所述圆锥形状具有位于所述联接件的旋转轴线上的顶点,其中,在联接件定位在所述旋转力传递角位置的状态下,所述顶点与驱动轴的自由端相对,并且当旋转力被传递至所述联接件时,所述联接件覆盖驱动轴的自由端,并且所述旋转力接收部沿着所述联接件的旋转方向以规则间隔设置。
18.根据权利要求13、14、16或18所述的旋转力传递部件,其中,在联接件定位在所述旋转力传递角位置的状态下,所述联接件的旋转轴线与所述电子照相感光鼓的轴线大致同轴;其中,在联接件定位在所述脱离角位置的状态下,所述联接件的旋转轴线相对于所述电子照相感光鼓的轴线倾斜,以便允许所述联接件的在所述处理盒从电子照相成像设备主组件拆卸的移除方向上的上游部从所述驱动轴的自由端旁边经过。
19.一种用于电子照相成像设备的主组件的电子照相感光鼓的旋转力传递部件,其中,所述电子照相成像设备的所述主组件包括驱动轴,所述驱动轴待由电机驱动并且具有旋转力施加部,其中所述电子照相感光鼓能够沿着与驱动轴的轴向方向大致垂直的方向从所述电子照相成像设备的主组件拆卸,所述旋转力传递部件包括:
用于将旋转力传递至所述电子照相感光鼓的联接件,所述联接件包括用于与所述旋转力施加部接合以从所述驱动轴接收旋转力的旋转力接收部以及用于将通过所述旋转力接收部接收的旋转力传递至所述电子照相感光鼓的旋转力传递部;所述联接件能够在旋转力传递角位置与脱离角位置之间枢转,在所述旋转力传递角位置,所述联接件将用于旋转所述电子照相感光鼓的旋转力传递至所述电子照相感光鼓;在所述脱离角位置,所述联接件从所述旋转力传递角位置远离所述电子照相感光鼓的轴线倾斜;
用于从所述旋转力传递部接收旋转力以便旋转所述电子照相感光鼓的旋转力接收件;
其中,所述联接件具有凹部,所述联接件的旋转轴线在所述凹部中延伸;其中,多个这样的旋转力接收部设置在中心位于所述联接件的旋转轴线上的一假想圆上,且处于彼此大致径向相对的位置处;其中,在处理盒被安装至电子照相成像设备的所述主组件的状态下,所述凹部覆盖所述驱动轴的自由端;其中,所述联接件通过与所述旋转力施加部接合而接收沿所述联接件的旋转方向的旋转力,所述旋转力施加部邻近所述驱动轴的自由端沿着与驱动轴的轴线大致垂直的方向突出,其中,当从电子照相成像设备的主组件拆卸所述处理盒时,通过响应于所述处理盒沿着与所述电子照相感光鼓的轴线大致垂直的方向的运动从所述旋转力传递角位置枢转至所述脱离角位置,所述联接件与所述驱动轴脱离,使得所述联接件的一部分从驱动轴旁边绕过。
20.根据权利要求19所述的旋转力传递部件,其中,所述凹部具有圆锥形状,所述圆锥形状具有位于所述联接件的旋转轴线上的顶点,其中,在联接件定位在所述旋转力传递角位置的状态下,所述顶点与驱动轴的自由端相对,并且当旋转力被传递至所述联接件时,所述联接件覆盖驱动轴的自由端,并且所述旋转力接收部沿着所述联接件的旋转方向以规则间隔设置。
21.根据权利要求19或20所述的旋转力传递部件,其中,在联接件定位在所述旋转力传递角位置的状态下,所述联接件的旋转轴线与所述电子照相感光鼓的轴线大致同轴;其中,在联接件定位在所述脱离角位置的状态下,所述联接件的旋转轴线相对于所述电子照相感光鼓的轴线倾斜,以便允许所述联接件的在所述处理盒从电子照相成像设备主组件拆卸的移除方向上的上游部从所述驱动轴的自由端旁边经过。
22.一种用于电子照相成像设备的主组件的电子照相感光鼓的旋转力传递部件,其中,所述电子照相成像设备的所述主组件包括驱动轴,所述驱动轴待由电机驱动并且具有旋转力施加部,其中所述电子照相感光鼓能够沿着与驱动轴的轴向方向大致垂直的方向安装至所述所述电子照相成像设备的主组件并且从所述电子照相成像设备的主组件拆卸,所述旋转力传递部件包括:
能够与所述旋转力施加部接合以便接收用于旋转所述电子照相感光鼓的旋转力的联接件,所述联接件能够进入用于将用于旋转所述电子照相感光鼓的旋转力传递至所述电子照相感光鼓的旋转力传递角位置,并且能够进入预接合角位置以及脱离角位置;在所述预接合角位置,所述联接件从所述旋转力传递角位置远离所述电子照相感光鼓的轴线倾斜;在所述脱离角位置,所述联接件从所述旋转力传递角位置远离所述电子照相感光鼓的轴线倾斜,
其中,当所述处理盒沿着与所述电子照相感光鼓的轴线大致垂直的方向被安装至电子照相成像设备的主组件时,所述联接件从所述预接合角位置移至所述旋转力传递角位置以便与驱动轴相对,并且,当沿着与所述电子照相感光鼓的轴线大致垂直的方向从电子照相成像设备的主组件拆卸所述处理盒时,所述联接件通过从所述旋转力传递角位置移至所述脱离角位置而与驱动轴脱离。
23.根据权利要求22的旋转力传递部件,其中,所述联接件具有凹部,所述联接件的旋转轴线在所述凹部中延伸,其中,当所述处理盒被安装至电子照相成像设备的主组件时,所述处理盒从所述预接合角位置枢转至所述旋转力传递角位置,使得所述联接件的相对于所述处理盒被安装至电子照相成像设备主组件的安装方向的下游部从所述驱动轴旁边绕过,
其中,在所述联接件定位在所述旋转力传递角位置的状态下,所述凹部覆盖所述驱动轴的自由端,其中,所述联接件通过与所述旋转力施加部接合而借助旋转力沿着所述联接件的旋转方向旋转,所述旋转力施加部邻近所述驱动轴的自由端沿着与驱动轴的轴线大致垂直的方向突出,其中,当从电子照相成像设备的主组件拆卸所述处理盒时,所述联接件通过响应于所述处理盒沿着与所述电子照相感光鼓的轴线大致垂直的方向的运动、从所述旋转力传递角位置枢转至所述脱离角位置而与驱动轴脱离,使得所述联接件的一部分从驱动轴旁边绕过。
24.根据权利要求23所述的旋转力传递部件,其中,多个这样的旋转力接收部设置在中心位于所述联接件的旋转轴线上的一假想圆上,且处于彼此大致径向相对的位置处。
25.根据权利要求23所述的旋转力传递部件,其中,所述凹部包括朝着它的自由端扩张的扩张部,并且多个所述旋转力接收部沿着所述联接件的旋转方向以规则间隔设置,其中,在相对于驱动轴的轴线彼此径向相对的两个位置的每一个位置处均设置有所述旋转力施加部,并且
其中,通过所述旋转力接收部中的一个与旋转力施加部中的一个接合以及通过旋转力接收部中的另一个与旋转力施加部中的另一个接合,所述联接件从驱动轴接收旋转力以便旋转;其中,所述旋转力接收部中的所述一个与所述旋转力接收部中的所述另一个相对,并且所述旋转力施加部中的所述一个与所述旋转力施加部中的所述另一个相对。
26.根据权利要求25所述的旋转力传递部件,其中,所述扩张部具有圆锥形状,所述圆锥形状具有位于所述联接件的旋转轴线上的顶点,其中,在联接件定位在所述旋转力传递角位置的状态下,所述顶点与驱动轴的自由端相对,并且当旋转力被传递至所述联接件时,所述联接件覆盖驱动轴的自由端,并且所述旋转力接收部沿着所述联接件的旋转方向以规则间隔设置。
27.根据权利要求25或26所述的旋转力传递部件,其中,在联接件定位在所述旋转力传递角位置的状态下,所述联接件的旋转轴线与所述电子照相感光鼓的轴线大致同轴;其中,在联接件定位在所述预接合角位置的状态下,所述联接件相对于所述电子照相感光鼓的轴线倾斜,以便其相对于处理盒被安装至设备主组件的安装方向的下游部从所述驱动轴的自由端旁边经过,其中,在联接件定位在所述脱离角位置的状态下,所述联接件的旋转轴线相对于所述电子照相感光鼓的轴线倾斜,以便允许所述联接件的在所述处理盒从电子照相成像设备主组件拆卸的移除方向上的上游部从所述驱动轴的自由端旁边经过。
28.根据权利要求24所述的旋转力传递部件,其中,所述联接件包括用于将旋转力传递至所述电子照相感光鼓的旋转力传递部以及位于所述旋转力接收部与所述旋转力传递部之间的连接部,其中,所述旋转力接收部、所述连接部和所述旋转力传递部沿着旋转轴线方向布置,当所述处理盒沿着大致垂直于驱动轴的方向移动时,所述预接合角位置通过所述连接部接触设置在电子照相成像设备的主组件中的一固定部而提供。
29.根据权利要求22所述的旋转力传递部件,进一步包括用于将所述联接件保持在预接合角位置的保持件,其中,所述联接件通过由所述保持件施加的力而保持在预接合角位置。
30.根据权利要求29所述的旋转力传递部件,其中,所述保持件包括弹性件,所述弹性件能够提供弹力以便将所述联接件保持在预接合角位置;或者,所述保持件包括摩擦件,所述摩擦件能够提供摩擦力以便将所述联接件保持在预接合角位置;或者,所述保持件包括锁定件,所述锁定件能够提供锁定力以便将所述联接件保持在预接合角位置;或者,所述保持件包括设置在所述联接件中的磁性件,所述磁性件能够提供磁力以便将所述联接件保持在预接合角位置。
31.一种用于电子照相成像设备的主组件的电子照相感光鼓的旋转力传递部件,其中,所述电子照相成像设备的所述主组件包括驱动轴,所述驱动轴待由电机驱动并且具有旋转力施加部,其中所述电子照相感光鼓能够沿着与驱动轴的轴向方向大致垂直的方向安装至所述所述电子照相成像设备的主组件并且从所述电子照相成像设备的主组件拆卸,所述旋转力传递部件包括:
能够与所述旋转力施加部接合以便接收用于旋转所述电子照相感光鼓的旋转力的联接件,所述联接件能够进入用于将用于旋转所述电子照相感光鼓的旋转力传递至所述电子照相感光鼓的旋转力传递角位置,并且能够进入预接合角位置以及脱离角位置;在所述预接合角位置,所述联接件从所述旋转力传递角位置远离所述电子照相感光鼓的轴线倾斜;在所述脱离角位置,所述联接件从所述旋转力传递角位置远离所述电子照相感光鼓的轴线倾斜,
其中,当所述处理盒被安装至电子照相成像设备的主组件时,所述处理盒从所述预接合角位置枢转至所述旋转力传递角位置,使得所述联接件的相对于所述处理盒被安装至电子照相成像设备的主组件的安装方向的下游部从所述驱动轴旁边绕过,
其中,当所述处理盒被安装至电子照相成像设备的主组件时,当沿着与所述处理盒从设备主组件拆卸的拆卸方向相反的方向看时,所述联接件的相对于所述拆卸方向的上游部位于所述驱动轴的后方,以及
当从电子照相成像设备的主组件拆卸所述处理盒时,所述联接件通过响应于所述处理盒沿着与所述电子照相感光鼓的轴线大致垂直的方向的移动、从所述旋转力传递角位置枢转至所述脱离角位置而与所述驱动轴分离,使得位于驱动轴后方的一部分从所述驱动轴旁边绕过。
32.根据权利要求31所述的旋转力传递部件,其中,所述联接件具有凹部,所述联接件的旋转轴线在所述凹部中延伸,并且在所述联接件定位在所述旋转力传递角位置的状态下,所述凹部覆盖所述驱动轴的自由端,其中,所述联接件通过与所述旋转力施加部接合而接收沿所述联接件的旋转方向的旋转力,所述旋转力施加部邻近所述驱动轴的自由端沿着与驱动轴的轴线大致垂直的方向突出。
33.根据权利要求32所述的旋转力传递部件,其中,多个这样的旋转力接收部设置在中心位于所述联接件的旋转轴线上的一假想圆上,且处于彼此大致径向相对的位置处。
34.根据权利要求32所述的旋转力传递部件,其中,所述凹部包括朝着它的自由端扩张的扩张部,并且多个所述旋转力接收部沿着所述联接件的旋转方向以规则间隔设置,其中,在相对于驱动轴的轴线彼此径向相对的两个位置的每一个位置处均设置有所述旋转力施加部,并且
其中,通过所述旋转力接收部中的一个与旋转力施加部中的一个接合以及通过旋转力接收部中的另一个与旋转力施加部中的另一个接合,所述联接件从驱动轴接收旋转力以便旋转;其中,所述旋转力接收部中的所述一个与所述旋转力接收部中的所述另一个相对,并且所述旋转力施加部中的所述一个与所述旋转力施加部中的所述另一个相对。
35.根据权利要求34所述的旋转力传递部件,其中,所述扩张部具有圆锥形状,所述圆锥形状具有位于所述联接件的旋转轴线上的顶点,其中,在联接件定位在所述旋转力传递角位置的状态下,所述顶点与驱动轴的自由端相对,并且当旋转力被传递至所述联接件时,所述联接件覆盖驱动轴的自由端,并且所述旋转力接收部沿着所述联接件的旋转方向以规则间隔设置。
36.根据权利要求31、32、34或35所述的旋转力传递部件,其中,在联接件定位在所述旋转力传递角位置的状态下,所述联接件的旋转轴线与所述电子照相感光鼓的轴线大致同轴;其中,在联接件定位在所述预接合角位置的状态下,所述联接件相对于所述电子照相感光鼓的轴线倾斜,以便其相对于处理盒被安装至设备主组件的安装方向的下游部从所述驱动轴的自由端旁边经过,其中,在联接件定位在所述脱离角位置的状态下,所述联接件的旋转轴线相对于所述电子照相感光鼓的轴线倾斜,以便允许所述联接件的在所述处理盒从电子照相成像设备主组件拆卸的移除方向上的一上游部从所述驱动轴的自由端旁边经过。
37.根据权利要求31或32或33所述的旋转力传递部件,其中,所述联接件包括用于将旋转力传递至所述电子照相感光鼓的旋转力传递部以及位于所述旋转力接收部与所述旋转力传递部之间的连接部,其中,所述旋转力接收部、所述连接部和所述旋转力传递部沿着旋转轴线方向布置,当所述处理盒沿着大致垂直于驱动轴的方向移动时,所述预接合角位置通过所述连接部接触设置在电子照相成像设备的主组件中的一固定部而提供。
38.根据权利要求31所述的旋转力传递部件,进一步包括用于将所述联接件保持在预接合角位置的保持件,其中,所述联接件通过由所述保持件施加的力而保持在预接合角位置。
39.根据权利要求38所述的旋转力传递部件,其中,所述保持件包括弹性件,所述弹性件能够提供弹力以便将所述联接件保持在预接合角位置;或者,所述保持件包括摩擦件,所述摩擦件能够提供摩擦力以便将所述联接件保持在预接合角位置;或者,所述保持件包括锁定件,所述锁定件能够提供锁定力以便将所述联接件保持在预接合角位置;或者,所述保持件包括设置在所述联接件中的磁性件,所述磁性件能够提供磁力以便将所述联接件保持在预接合角位置。
40.一种用于电子照相成像设备的主组件的电子照相感光鼓的旋转力传递部件,其中,所述电子照相成像设备的所述主组件包括驱动轴,所述驱动轴待由电机驱动并且具有旋转力施加部,其中所述电子照相感光鼓能够沿着与驱动轴的轴向方向大致垂直的方向安装至所述所述电子照相成像设备的主组件并且从所述电子照相成像设备的主组件拆卸,所述旋转力传递部件包括:
用于将旋转力传递至所述电子照相感光鼓的联接件,所述联接件包括用于与旋转力施加部接合以便从驱动轴接收旋转力的旋转力接收部,以及用于将通过所述旋转力接收部接收的旋转力传递至所述电子照相感光鼓的旋转力传递部,其中,所述联接件能够进入用于将用于旋转所述电子照相感光鼓的旋转力通过所述旋转力传递部传递至所述电子照相感光鼓的旋转力传递角位置,并且能够进入预接合角位置以及脱离角位置;在所述预接合角位置,所述联接件从所述旋转力传递角位置远离所述电子照相感光鼓的轴线倾斜;在所述脱离角位置,所述联接件从所述旋转力传递角位置远离所述电子照相感光鼓的轴线倾斜;
用于从所述旋转力传递部接收旋转力以便旋转所述电子照相感光鼓的旋转力接收件;
其中,当所述处理盒被安装至电子照相成像设备的主组件时,响应于所述处理盒沿着与所述电子照相感光鼓的轴线大致垂直的方向的运动,所述处理盒从所述预接合角位置枢转至所述旋转力传递角位置,
其中,当所述处理盒被安装至电子照相成像设备的主组件时,当沿着与所述处理盒从设备主组件拆卸的拆卸方向相反的方向看时,所述联接件的相对于所述拆卸方向的上游部位于所述驱动轴的后方,以及
当从电子照相成像设备的主组件拆卸所述处理盒时,所述联接件通过响应于所述处理盒沿着与所述电子照相感光鼓的轴线大致垂直的方向的移动、从所述旋转力传递角位置枢转至所述脱离角位置而与所述驱动轴分离,使得位于驱动轴后方的一部分从所述驱动轴旁边绕过。
41.根据权利要求40所述的旋转力传递部件,其中,所述联接件具有凹部,所述联接件的旋转轴线在所述凹部中延伸,其中,当所述处理盒被安装至电子照相成像设备的主组件时,所述处理盒从所述预接合角位置枢转至所述旋转力传递角位置,使得所述联接件的相对于所述处理盒被安装至电子照相成像设备主组件的安装方向的下游部从所述驱动轴旁边绕过,
其中,所述联接件具有凹部,所述联接件的旋转轴线在所述凹部中延伸,并且在所述联接件定位在所述旋转力传递角位置的状态下,所述凹部覆盖所述驱动轴的自由端,其中,所述联接件通过与所述旋转力施加部接合而接收沿所述联接件的旋转方向的旋转力,所述旋转力施加部邻近所述驱动轴的自由端沿着与驱动轴的轴线大致垂直的方向突出,以及
其中,当从电子照相成像设备的主组件拆卸所述处理盒时,所述联接件通过响应于所述处理盒沿着与所述电子照相感光鼓的轴线大致垂直的方向的运动、从所述旋转力传递角位置枢转至所述脱离角位置而与驱动轴脱离,使得位于驱动轴后方的一部分从驱动轴旁边绕过。
42.根据权利要求40或41所述的旋转力传递部件,其中,多个这样的旋转力接收部设置在中心位于所述联接件的旋转轴线上的一假想圆上,且处于彼此大致径向相对的位置处。
43.根据权利要求41所述的旋转力传递部件,其中,所述凹部包括朝着它的自由端扩张的扩张部,并且多个所述旋转力接收部沿着所述联接件的旋转方向以规则间隔设置,其中,在相对于驱动轴的轴线彼此径向相对的两个位置的每一个位置处均设置有所述旋转力施加部,并且
其中,通过所述旋转力接收部中的一个与旋转力施加部中的一个接合以及通过旋转力接收部中的另一个与旋转力施加部中的另一个接合,所述联接件从驱动轴接收旋转力以便旋转;其中,所述旋转力接收部中的所述一个与所述旋转力接收部中的所述另一个相对,并且所述旋转力施加部中的所述一个与所述旋转力施加部中的所述另一个相对。
44.根据权利要求43所述的旋转力传递部件,其中,所述扩张部具有圆锥形状,所述圆锥形状具有位于所述联接件的旋转轴线上的顶点,并且所述旋转力接收部沿着所述联接件的旋转方向以规则间隔设置。
45.根据权利要求40、41、43或44所述的旋转力传递部件,其中,在联接件定位在所述旋转力传递角位置的状态下,所述联接件的旋转轴线与所述电子照相感光鼓的轴线大致同轴;其中,在联接件定位在所述预接合角位置的状态下,所述联接件相对于所述电子照相感光鼓的轴线倾斜,使得其相对于处理盒被安装至设备主组件的安装方向的下游部从驱动轴的自由端旁边经过,其中,在所述联接件定位在所述脱离角位置的状态下,所述联接件的旋转轴线相对于所述电子照相感光鼓的轴线倾斜,以便允许所述联接件的在所述处理盒从电子照相成像设备主组件拆卸的移除方向上的上游部从所述驱动轴的自由端旁边经过。
46.根据权利要求40所述的旋转力传递部件,其中,所述联接件包括用于将旋转力传递至所述电子照相感光鼓的旋转力传递部以及位于所述旋转力接收部与所述旋转力传递部之间的连接部,其中,所述旋转力接收部、所述连接部和所述旋转力传递部沿着旋转轴线方向布置,当所述处理盒沿着大致垂直于驱动轴的方向移动时,所述预接合角位置通过所述连接部接触设置在电子照相成像设备的主组件中的固定部而提供。
47.根据权利要求40所述的旋转力传递部件,进一步包括用于将所述联接件保持在预接合角位置的保持件,其中,所述联接件通过由所述保持件施加的力而保持在预接合角位置。
48.根据权利要求47所述的旋转力传递部件,其中,所述保持件包括弹性件,所述弹性件能够提供弹力以便将所述联接件保持在预接合角位置;或者,所述保持件包括摩擦件,所述摩擦件能够提供摩擦力以便将所述联接件保持在预接合角位置;或者,所述保持件包括锁定件,所述锁定件能够提供锁定力以便将所述联接件保持在预接合角位置;或者,所述保持件包括设置在所述联接件中的磁性件,所述磁性件能够提供磁力以便将所述联接件保持在预接合角位置。
49.一种用于电子照相成像设备的主组件的电子照相感光鼓的旋转力传递部件,其中,所述电子照相成像设备的所述主组件包括驱动轴,所述驱动轴待由电机驱动并且具有旋转力施加部,其中所述电子照相感光鼓能够沿着与驱动轴的轴向方向大致垂直的方向安装至所述所述电子照相成像设备的主组件并且从所述电子照相成像设备的主组件拆卸,所述旋转力传递部件包括:
用于将旋转力传递至所述电子照相感光鼓的联接件,所述联接件包括用于与旋转力施加部接合以便从驱动轴接收旋转力的旋转力接收部,以及用于将通过所述旋转力接收部接收的旋转力传递至所述电子照相感光鼓的旋转力传递部,其中,所述联接件能够进入用于将用于旋转所述电子照相感光鼓的旋转力通过所述旋转力传递部传递至所述电子照相感光鼓的旋转力传递角位置,并且能够进入预接合角位置以及脱离角位置;在所述预接合角位置,所述联接件从所述旋转力传递角位置远离所述电子照相感光鼓的轴线倾斜;在所述脱离角位置,所述联接件从所述旋转力传递角位置远离所述电子照相感光鼓的轴线倾斜;
用于从所述旋转力传递部接收旋转力以便旋转所述电子照相感光鼓的旋转力接收件;
其中,所述联接件具有凹部,所述联接件的旋转轴线在所述凹部中延伸,其中,多个这样的旋转力接收部设置在中心位于所述联接件的旋转轴线上的一假想圆上,且处于彼此大致径向相对的位置处,
其中,当所述处理盒被安装至电子照相成像设备的主组件时,所述处理盒从所述预接合角位置枢转至所述旋转力传递角位置,使得所述联接件的相对于所述处理盒被安装至电子照相成像设备的主组件的安装方向的下游部从所述驱动轴旁边绕过,
其中,所述联接件具有凹部,所述联接件的旋转轴线在所述凹部中延伸,其中,在所述联接件定位在所述旋转力传递角位置的状态下,所述凹部覆盖所述驱动轴的自由端,其中,所述联接件通过与所述旋转力施加部接合而接收沿所述联接件的旋转方向的旋转力,所述旋转力施加部邻近所述驱动轴的自由端沿着与驱动轴的轴线大致垂直的方向突出,以及
其中,当从电子照相成像设备的主组件拆卸所述处理盒时,所述联接件通过响应于所述处理盒沿着与所述电子照相感光鼓的轴线大致垂直的方向的运动、从所述旋转力传递角位置枢转至所述脱离角位置而与驱动轴脱离,使得位于驱动轴后方的一部分从驱动轴旁边绕过。
50.根据权利要求49所述的旋转力传递部件,其中,所述扩张部具有圆锥形状,所述圆锥形状具有位于所述联接件的旋转轴线上的顶点,其中,在联接件定位在所述旋转力传递角位置的状态下,所述顶点与驱动轴的自由端相对,并且当旋转力被传递至所述联接件时,所述联接件覆盖驱动轴的自由端,并且所述旋转力接收部沿着所述联接件的旋转方向以规则间隔设置。
51.根据权利要求49或50所述的旋转力传递部件,其中,在联接件定位在所述旋转力传递角位置的状态下,所述联接件的旋转轴线与所述电子照相感光鼓的轴线大致同轴;其中,在联接件定位在所述脱离角位置的状态下,所述联接件的旋转轴线相对于所述电子照相感光鼓的轴线倾斜,以便允许所述联接件的在所述处理盒从电子照相成像设备主组件拆卸的移除方向上的上游部从所述驱动轴的自由端旁边经过。
52.根据权利要求13、19、22或49所述的旋转力传递部件,其中,所述旋转力接收部能够与所述旋转力施加部接合,所述旋转力施加部能够与驱动轴一体地旋转,当所述旋转力接收部接收用于旋转所述联接件的驱动力时,所述旋转力接收部沿着受到朝向所述驱动轴的力的方向倾斜。
53.根据权利要求1、7、13、19、22、31、40或49所述的旋转力传递部件,其中,所述联接件设置于所述电子照相感光鼓的端部,并且相对于所述电子照相感光鼓的轴线能够大致沿所有方向倾斜。
54.根据权利要求13、19、20或49所述的旋转力传递部件,其中,在所述旋转力传递部与所述旋转力接收件之间设置有间隙,使得所述联接件相对于所述电子照相感光鼓的轴线能够大致沿所有方向倾斜,其中,所述旋转力传递部被设置在所述电子照相感光鼓的端部并且能够相对于所述旋转力接收件移动,并且所述旋转力传递部和所述旋转力接收件能够沿着所述联接件的旋转方向彼此接合。
55.根据权利要求21、22、40或49所述的旋转力传递部件,其中,所述电子照相成像设备的主组件包括能够在压迫位置与从所述压迫位置回缩的回缩位置之间移动的压迫件,其中,当所述处理盒被安装至电子照相成像设备的主组件时,所述联接件通过在与处理盒接触而临时回缩到回缩位置之后恢复到压迫位置的压迫件的弹力压迫而移至预接合角位置。
56.根据权利要求22、31、40或49所述的旋转力传递部件,其中,当所述处理盒被安装至电子照相成像设备的主组件时,所述联接件通过向电子照相感光鼓的轴向方向移动以及通过从预接合角位置枢转至旋转力传递角位置而与驱动轴的自由端相对。
57.一种用于电子照相成像设备的主组件的电子照相感光鼓的旋转力传递部件,其中,所述电子照相成像设备的所述主组件包括驱动轴,所述驱动轴待由电机驱动并且具有旋转力施加部,其中所述电子照相感光鼓能够沿着与驱动轴的轴向方向大致垂直的方向安装至所述所述电子照相成像设备的主组件并且从所述电子照相成像设备的主组件拆卸,所述旋转力传递部件包括:
就所述联接件旋转时的轴线方向而言位于与所述电子照相感光鼓相反侧的、具有开口的凹部;
多个突出部,其以预定间隔沿着所述联接件的旋转方向设置并且从所述凹部的自由端边缘部沿着与所述旋转方向相交的方向突出;
多个旋转力接收部,其用于在处理盒被安装至设备主组件的状态下与所述旋转力施加部接合以便从驱动轴接收旋转力,其中,所述多个旋转力接收部设置在所述多个突出部上,且分别设置于如下多个位置处:所述位置与所述联接件的轴线等距,且所述联接件的轴线位于所述位置之间;
形成在所述突出部之间的凹部,所述凹部沿着所述轴线的方向凹陷,
旋转力传递部,用于将通过所述旋转力接收部从所述旋转力施加部接收的旋转力传递至所述电子照相感光鼓;
联接件,能够在用于将用于旋转所述电子照相感光鼓的旋转力通过所述旋转力传递部传递至所述电子照相感光鼓的旋转力传递角位置和一预接合角位置之间枢转,在所述预接合角位置,所述联接件远离所述电子照相感光鼓的轴线并且远离所述旋转力传递角位置倾斜;并且所述联接件能够在所述旋转力传递角位置和一脱离角位置之间枢转,在所述脱离角位置,所述联接件远离所述电子照相感光鼓的轴线并远离所述旋转力传递角位置倾斜。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201310275156.6A CN103439870B (zh) | 2006-12-22 | 2007-12-25 | 感光鼓和旋转力接收构件 |
| CN201310276196.2A CN103345138B (zh) | 2006-12-22 | 2007-12-25 | 联接件 |
| CN201310276561.XA CN103324057B (zh) | 2006-12-22 | 2007-12-25 | 联接件和用于电子照相感光鼓的装置 |
| CN201510660802.XA CN105446106B (zh) | 2006-12-22 | 2007-12-25 | 鼓法兰和感光鼓 |
| CN201310276178.4A CN103345135B (zh) | 2006-12-22 | 2007-12-25 | 鼓法兰和感光鼓 |
| CN201310275129.9A CN103383534B (zh) | 2006-12-22 | 2007-12-25 | 旋转力传递部件、联接件和鼓法兰 |
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP346191/2006 | 2006-12-22 | ||
| JP2006346191 | 2006-12-22 | ||
| JP042666/2007 | 2007-02-22 | ||
| JP2007042666 | 2007-02-22 | ||
| JP330304/2007 | 2007-12-21 | ||
| JP2007330304A JP4948382B2 (ja) | 2006-12-22 | 2007-12-21 | 感光ドラム取り付け用カップリング部材 |
| PCT/JP2007/075366 WO2008081966A1 (en) | 2006-12-22 | 2007-12-25 | Rotational force transmitting part |
Related Child Applications (6)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201310276196.2A Division CN103345138B (zh) | 2006-12-22 | 2007-12-25 | 联接件 |
| CN201310276561.XA Division CN103324057B (zh) | 2006-12-22 | 2007-12-25 | 联接件和用于电子照相感光鼓的装置 |
| CN201510660802.XA Division CN105446106B (zh) | 2006-12-22 | 2007-12-25 | 鼓法兰和感光鼓 |
| CN201310276178.4A Division CN103345135B (zh) | 2006-12-22 | 2007-12-25 | 鼓法兰和感光鼓 |
| CN201310275129.9A Division CN103383534B (zh) | 2006-12-22 | 2007-12-25 | 旋转力传递部件、联接件和鼓法兰 |
| CN201310275156.6A Division CN103439870B (zh) | 2006-12-22 | 2007-12-25 | 感光鼓和旋转力接收构件 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101583910A true CN101583910A (zh) | 2009-11-18 |
| CN101583910B CN101583910B (zh) | 2013-07-24 |
Family
ID=39166737
Family Applications (7)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201510660802.XA Active CN105446106B (zh) | 2006-12-22 | 2007-12-25 | 鼓法兰和感光鼓 |
| CN201310275129.9A Active CN103383534B (zh) | 2006-12-22 | 2007-12-25 | 旋转力传递部件、联接件和鼓法兰 |
| CN201310276178.4A Active CN103345135B (zh) | 2006-12-22 | 2007-12-25 | 鼓法兰和感光鼓 |
| CN201310276196.2A Active CN103345138B (zh) | 2006-12-22 | 2007-12-25 | 联接件 |
| CN201310276561.XA Active CN103324057B (zh) | 2006-12-22 | 2007-12-25 | 联接件和用于电子照相感光鼓的装置 |
| CN2007800475121A Active CN101583910B (zh) | 2006-12-22 | 2007-12-25 | 旋转力传递部件 |
| CN201310275156.6A Active CN103439870B (zh) | 2006-12-22 | 2007-12-25 | 感光鼓和旋转力接收构件 |
Family Applications Before (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201510660802.XA Active CN105446106B (zh) | 2006-12-22 | 2007-12-25 | 鼓法兰和感光鼓 |
| CN201310275129.9A Active CN103383534B (zh) | 2006-12-22 | 2007-12-25 | 旋转力传递部件、联接件和鼓法兰 |
| CN201310276178.4A Active CN103345135B (zh) | 2006-12-22 | 2007-12-25 | 鼓法兰和感光鼓 |
| CN201310276196.2A Active CN103345138B (zh) | 2006-12-22 | 2007-12-25 | 联接件 |
| CN201310276561.XA Active CN103324057B (zh) | 2006-12-22 | 2007-12-25 | 联接件和用于电子照相感光鼓的装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201310275156.6A Active CN103439870B (zh) | 2006-12-22 | 2007-12-25 | 感光鼓和旋转力接收构件 |
Country Status (16)
| Country | Link |
|---|---|
| US (10) | US8295734B2 (zh) |
| EP (2) | EP2062099B1 (zh) |
| JP (1) | JP4948382B2 (zh) |
| KR (6) | KR101367028B1 (zh) |
| CN (7) | CN105446106B (zh) |
| AU (1) | AU2007340402B2 (zh) |
| BR (2) | BRPI0721104B1 (zh) |
| CA (5) | CA3006479C (zh) |
| DE (1) | DE112007003046B4 (zh) |
| HK (4) | HK1132339A1 (zh) |
| MX (4) | MX347646B (zh) |
| MY (2) | MY158797A (zh) |
| RU (8) | RU2521160C2 (zh) |
| SG (3) | SG191446A1 (zh) |
| TW (6) | TWI499873B (zh) |
| WO (1) | WO2008081966A1 (zh) |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102478769A (zh) * | 2010-11-19 | 2012-05-30 | 珠海赛纳打印科技股份有限公司 | 一种感光鼓驱动组件 |
| CN103592831A (zh) * | 2010-09-20 | 2014-02-19 | 科企有限公司 | 感光鼓连接组件 |
| WO2015043339A1 (zh) * | 2013-09-29 | 2015-04-02 | 珠海赛纳打印科技股份有限公司 | 一种旋转力驱动组件以及处理盒 |
| CN104516224A (zh) * | 2013-09-29 | 2015-04-15 | 珠海凯威置业有限公司 | 一种旋转力驱动组件以及处理盒 |
| WO2015158274A1 (zh) * | 2014-04-16 | 2015-10-22 | 珠海艾派克科技股份有限公司 | 一种处理盒 |
| CN105319891A (zh) * | 2014-07-17 | 2016-02-10 | 京瓷办公信息系统株式会社 | 驱动传递机构及具备其的图像形成装置 |
| CN105739267A (zh) * | 2014-12-26 | 2016-07-06 | 佳能株式会社 | 成像设备 |
| CN105807595A (zh) * | 2016-04-13 | 2016-07-27 | 珠海市润鑫打印耗材有限公司 | 处理盒的旋转定位组件及处理盒 |
| CN107132744A (zh) * | 2016-02-26 | 2017-09-05 | 中山诚威科技有限公司 | 一种处理盒 |
| CN108107696A (zh) * | 2016-09-28 | 2018-06-01 | 纳思达股份有限公司 | 一种驱动组件及其处理盒和电子成像装置 |
| CN109116707A (zh) * | 2011-12-06 | 2019-01-01 | 佳能株式会社 | 盒、感光鼓传动装置组装方法及电子照相成像设备 |
| CN110426939A (zh) * | 2013-09-12 | 2019-11-08 | 佳能株式会社 | 用于电子照相式成像装置的盒和鼓单元 |
| JP2020518865A (ja) * | 2017-06-30 | 2020-06-25 | 納思達股▲ふん▼有限公司 | 動力受けユニット、回転部材、プロセスカートリッジ、装着方法及び取外方法 |
| US10768573B2 (en) | 2018-03-14 | 2020-09-08 | Print-Rite, Unicorn Image Products Co., Ltd. Of Zhuhai | Process cartridge and electrophotographic image forming apparatus |
| CN113267981A (zh) * | 2015-02-27 | 2021-08-17 | 佳能株式会社 | 盒 |
| CN116203811A (zh) * | 2017-12-13 | 2023-06-02 | 佳能株式会社 | 盒与图像形成装置 |
Families Citing this family (106)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101061759B (zh) | 2004-07-21 | 2011-05-25 | 斯蒂尔瑞弗系统有限公司 | 用于同步回旋加速器的可编程的射频波形发生器 |
| JP4498407B2 (ja) | 2006-12-22 | 2010-07-07 | キヤノン株式会社 | プロセスカートリッジ、電子写真画像形成装置、及び、電子写真感光体ドラムユニット |
| JP4948382B2 (ja) | 2006-12-22 | 2012-06-06 | キヤノン株式会社 | 感光ドラム取り付け用カップリング部材 |
| JP5311854B2 (ja) | 2007-03-23 | 2013-10-09 | キヤノン株式会社 | 電子写真画像形成装置、現像装置、及び、カップリング部材 |
| US7711287B2 (en) * | 2007-05-15 | 2010-05-04 | Canon Kabushiki Kaisha | Cartridge and electrophotographic image forming apparatus |
| US9261821B2 (en) | 2007-10-30 | 2016-02-16 | Canon Kabushiki Kaisha | Image forming apparatus |
| JP4912381B2 (ja) * | 2007-10-30 | 2012-04-11 | キヤノン株式会社 | 駆動伝達装置、及び画像形成装置 |
| JP5328230B2 (ja) | 2008-06-10 | 2013-10-30 | キヤノン株式会社 | カートリッジ、及び、前記カートリッジを用いた電子写真画像形成装置 |
| JP4558083B2 (ja) | 2008-06-20 | 2010-10-06 | キヤノン株式会社 | カートリッジ、前記カートリッジの組立て方法、及び、前記カートリッジの分解方法 |
| JP5288900B2 (ja) * | 2008-06-20 | 2013-09-11 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| JP5127584B2 (ja) * | 2008-06-20 | 2013-01-23 | キヤノン株式会社 | ドラムユニット、及び、電子写真画像形成装置 |
| JP5283986B2 (ja) * | 2008-06-20 | 2013-09-04 | キヤノン株式会社 | ドラムユニット、及び、電子写真画像形成装置 |
| JP5495671B2 (ja) * | 2008-08-27 | 2014-05-21 | キヤノン株式会社 | 現像カートリッジ、及び、カップリング部材 |
| JP5371627B2 (ja) | 2008-08-27 | 2013-12-18 | キヤノン株式会社 | 現像装置、現像カートリッジ、及び、電子写真画像形成装置 |
| EP2333620A1 (en) | 2008-09-01 | 2011-06-15 | Canon Kabushiki Kaisha | Developing cartridge, process cartridge, and electrophotographic image forming apparatus |
| JP5147607B2 (ja) * | 2008-09-01 | 2013-02-20 | キヤノン株式会社 | 画像形成装置 |
| JP4663801B2 (ja) * | 2008-09-01 | 2011-04-06 | キヤノン株式会社 | プロセスカートリッジ及び画像形成装置 |
| JP5419584B2 (ja) * | 2008-09-01 | 2014-02-19 | キヤノン株式会社 | カートリッジ及び電子写真画像形成装置 |
| JP5424749B2 (ja) * | 2008-09-01 | 2014-02-26 | キヤノン株式会社 | カートリッジ |
| US8029284B2 (en) * | 2008-09-29 | 2011-10-04 | Maxillent Ltd. | Implants, tools, and methods for sinus lift and lateral ridge augmentation |
| JP5451028B2 (ja) * | 2008-10-28 | 2014-03-26 | キヤノン株式会社 | 駆動伝達装置及び画像形成装置 |
| US8249483B2 (en) * | 2008-12-08 | 2012-08-21 | Mitsubishi Kagaku Imaging Corporation | Method and devices for remanufacturing printer cartridges |
| JP4803267B2 (ja) * | 2009-02-17 | 2011-10-26 | 富士ゼロックス株式会社 | 画像形成装置 |
| JP5506236B2 (ja) * | 2009-04-30 | 2014-05-28 | キヤノン株式会社 | カートリッジ、及び電子写真画像形成装置 |
| JP5430349B2 (ja) * | 2009-10-30 | 2014-02-26 | キヤノン株式会社 | 現像カートリッジ |
| JP5751779B2 (ja) * | 2009-10-30 | 2015-07-22 | キヤノン株式会社 | 現像装置、現像カートリッジ、プロセスカートリッジ、及び、画像形成装置 |
| JP5554963B2 (ja) * | 2009-10-30 | 2014-07-23 | キヤノン株式会社 | 現像カートリッジ及びプロセスカートリッジ |
| JP5428846B2 (ja) | 2009-12-24 | 2014-02-26 | ブラザー工業株式会社 | カートリッジ |
| JP5029682B2 (ja) * | 2009-12-25 | 2012-09-19 | ブラザー工業株式会社 | 現像カートリッジ |
| JP4911228B2 (ja) | 2010-01-29 | 2012-04-04 | ブラザー工業株式会社 | カートリッジおよび画像形成装置 |
| JP5683281B2 (ja) * | 2010-02-02 | 2015-03-11 | キヤノン株式会社 | ドラムユニット |
| JP5649328B2 (ja) * | 2010-05-10 | 2015-01-07 | キヤノン株式会社 | 画像形成装置 |
| US8644733B2 (en) | 2011-03-29 | 2014-02-04 | Static Control Components, Inc. | Cartridge drive shaft gear |
| US8892004B2 (en) | 2011-03-29 | 2014-11-18 | Static Control Components, Inc. | Drive gear for extended drive shaft |
| JP5273194B2 (ja) * | 2011-04-28 | 2013-08-28 | ブラザー工業株式会社 | カートリッジ |
| KR101848393B1 (ko) * | 2011-11-18 | 2018-04-13 | 에스프린팅솔루션 주식회사 | 화상형성장치 및 화상형성장치의 동력전달구조 |
| JP5355679B2 (ja) | 2011-12-27 | 2013-11-27 | キヤノン株式会社 | プロセスカートリッジ及び画像形成装置 |
| JP5901327B2 (ja) | 2012-02-09 | 2016-04-06 | キヤノン株式会社 | 現像装置、プロセスカートリッジ、および画像形成装置 |
| JP5928887B2 (ja) * | 2012-05-30 | 2016-06-01 | 富士ゼロックス株式会社 | 構造体及び画像形成装置 |
| JP5943716B2 (ja) | 2012-06-04 | 2016-07-05 | キヤノン株式会社 | 現像カートリッジ |
| JP6108728B2 (ja) | 2012-08-31 | 2017-04-05 | キヤノン株式会社 | 梱包材及びカートリッジ |
| TW201424467A (zh) * | 2012-09-28 | 2014-06-16 | Mevion Medical Systems Inc | 一粒子束之強度控制 |
| WO2014052721A1 (en) | 2012-09-28 | 2014-04-03 | Mevion Medical Systems, Inc. | Control system for a particle accelerator |
| US8909102B2 (en) * | 2012-10-31 | 2014-12-09 | Clover Technologies Group, LLP | Electrophotographic drum gear flange socket configurations |
| JP5949585B2 (ja) * | 2013-01-30 | 2016-07-06 | コニカミノルタ株式会社 | 回転動力伝達機構、および感光体ドラム装置 |
| US9182733B2 (en) | 2013-02-07 | 2015-11-10 | Canon Kabushiki Kaisha | Developer supply cartridge, process cartridge and image forming apparatus |
| JP6020237B2 (ja) * | 2013-02-15 | 2016-11-02 | 三菱化学株式会社 | 軸受部材、端部部材、感光体ドラムユニット、及び軸受部材の製造方法 |
| JP2014191025A (ja) * | 2013-03-26 | 2014-10-06 | Mitsubishi Chemicals Corp | 軸受部材、端部部材、感光体ドラムユニット、及びプロセスカートリッジ |
| US9098048B2 (en) | 2013-08-13 | 2015-08-04 | General Plastic Industrial Co., Ltd. | Transmission device for photosensitive drum |
| TW201502724A (zh) | 2013-07-08 | 2015-01-16 | Gen Plastic Ind Co Ltd | 感光鼓的傳動組件 |
| USRE46863E1 (en) | 2013-07-08 | 2018-05-22 | General Plastic Industrial Co., Ltd. | Transmission device for photosensitive drum |
| USRE46847E1 (en) | 2013-07-08 | 2018-05-15 | General Plastic Industrial Co., Ltd. | Transmission device for photosensitive drum |
| US9031465B2 (en) | 2013-08-13 | 2015-05-12 | General Plastic Industrial Co., Ltd. | Transmission device for photosensitive drum |
| US9091994B2 (en) | 2013-08-13 | 2015-07-28 | General Plastic Industrial Co., Ltd. | Transmission device for photosensitive drum |
| WO2016011925A1 (zh) * | 2014-07-25 | 2016-01-28 | 珠海艾派克科技股份有限公司 | 旋转力驱动组件、处理盒及图像形成装置 |
| US9740163B2 (en) * | 2013-09-29 | 2017-08-22 | Ninestar Corporation | Rotational force driving assembly process cartridge |
| JP2015121776A (ja) * | 2013-11-19 | 2015-07-02 | 三菱化学株式会社 | プロセスカートリッジ、感光体ドラムユニット、及び一組の端部部材 |
| JP6292077B2 (ja) | 2014-03-06 | 2018-03-14 | 三菱ケミカル株式会社 | 端部部材、感光体ドラムユニット、現像ローラユニットおよびプロセスカートリッジ |
| JP6277909B2 (ja) * | 2014-03-07 | 2018-02-14 | 三菱ケミカル株式会社 | 軸部材、端部部材、感光体ドラムユニット、現像ローラユニット、プロセスカートリッジ |
| JP6376782B2 (ja) | 2014-03-10 | 2018-08-22 | キヤノン株式会社 | カートリッジ及び画像形成装置 |
| US9829855B2 (en) * | 2014-05-22 | 2017-11-28 | Lexmark International, Inc. | Drive coupler |
| JP2016014850A (ja) | 2014-06-09 | 2016-01-28 | 三菱化学株式会社 | 軸部材、端部部材、感光体ドラムユニット、現像ローラユニット、プロセスカートリッジ |
| DE102015104038A1 (de) | 2014-06-20 | 2015-12-24 | General Plastic Industrial Co., Ltd. | Übertragungseinrichtung für eine photosensitive Trommel und Trommelvorrichtung damit |
| JP6265080B2 (ja) | 2014-07-10 | 2018-01-24 | 三菱ケミカル株式会社 | 端部部材、感光体ドラムユニット、現像ローラユニットおよびプロセスカートリッジ |
| TWI573001B (zh) | 2014-08-15 | 2017-03-01 | A drive assembly, and a photosensitive drum unit having the drive assembly | |
| TWI547774B (zh) | 2014-08-15 | 2016-09-01 | 感光鼓的傳動組件 | |
| CN105549351A (zh) | 2014-10-31 | 2016-05-04 | 三菱化学株式会社 | 端部部件、处理盒及处理盒的脱离方法 |
| CN108614402B (zh) * | 2014-11-13 | 2019-06-25 | 纳思达股份有限公司 | 处理盒及驱动组件 |
| KR102204068B1 (ko) | 2014-11-28 | 2021-01-15 | 캐논 가부시끼가이샤 | 카트리지 |
| JP2016148783A (ja) * | 2015-02-12 | 2016-08-18 | 三菱化学株式会社 | 軸部材、端部部材、感光体ドラムユニット、現像ローラユニット、プロセスカートリッジ |
| JP6512864B2 (ja) | 2015-02-27 | 2019-05-15 | キヤノン株式会社 | カートリッジ、プロセスカートリッジ、画像形成装置 |
| ES2970350T3 (es) | 2015-02-27 | 2024-05-28 | Canon Kk | Unidad de tambor y cartucho |
| CA2977914C (en) * | 2015-03-10 | 2022-03-15 | Canon Kabushiki Kaisha | Drum cylinder unit, method for attaching coupling member, and drum unit |
| JP6794117B2 (ja) | 2015-03-10 | 2020-12-02 | キヤノン株式会社 | ドラムシリンダユニット、カップリング部材の取り付け方法、ドラムユニット |
| US20160282798A1 (en) | 2015-03-24 | 2016-09-29 | Mitsubishi Chemical Corporation | Transmission device for a photosensitive drum |
| JP6873604B2 (ja) | 2015-06-05 | 2021-05-19 | キヤノン株式会社 | プロセスカートリッジ、および、電子写真画像形成装置 |
| CN106292236B (zh) * | 2015-06-08 | 2021-05-28 | 江西镭博钛电子科技有限公司 | 一种处理盒 |
| WO2016204246A1 (ja) | 2015-06-17 | 2016-12-22 | 三菱化学株式会社 | 端部部材、感光体ドラムユニット、プロセスカートリッジ |
| JP1543378S (zh) * | 2015-07-22 | 2016-02-08 | ||
| JP1543379S (zh) * | 2015-07-22 | 2016-02-08 | ||
| CN108139704B (zh) * | 2015-09-30 | 2020-03-17 | 佳能株式会社 | 鼓单元、处理盒和成像设备 |
| US9952555B2 (en) * | 2015-10-14 | 2018-04-24 | Canon Kabushiki Kaisha | Cartridge configured to be removably attachable to an image forming apparatus |
| JP6833402B2 (ja) * | 2015-10-14 | 2021-02-24 | キヤノン株式会社 | カートリッジ及び画像形成装置 |
| JP2017107205A (ja) * | 2015-12-07 | 2017-06-15 | 三菱化学株式会社 | 端部部材、感光体ドラムユニット、プロセスカートリッジ |
| CN105589313A (zh) * | 2016-02-04 | 2016-05-18 | 上福全球科技股份有限公司 | 碳粉匣的传动组件 |
| CA3034781C (en) | 2016-08-26 | 2022-10-18 | Canon Kabushiki Kaisha | Drum unit, cartridge, electrophotographic image forming apparatus and coupling member |
| CA3034218A1 (en) * | 2016-08-26 | 2018-03-01 | Canon Kabushiki Kaisha | Drum unit, cartridge, electrophotographic image forming apparatus, and coupling member |
| RU2019108101A (ru) | 2016-08-26 | 2020-09-28 | Кэнон Кабусики Кайся | Картридж и устройство формирования изображения |
| US9588478B1 (en) | 2016-09-30 | 2017-03-07 | Roy Fan | Drive coupling and transmitting assembly for photosensitive drum and toner cartridges |
| JP6957205B2 (ja) | 2017-05-31 | 2021-11-02 | キヤノン株式会社 | カートリッジおよび画像形成装置 |
| WO2019044987A1 (ja) * | 2017-08-31 | 2019-03-07 | 株式会社コナミアミューズメント | 搬送装置 |
| JP6625109B2 (ja) * | 2017-10-30 | 2019-12-25 | キヤノン株式会社 | 画像形成装置 |
| KR20190075752A (ko) | 2017-12-21 | 2019-07-01 | 휴렛-팩커드 디벨롭먼트 컴퍼니, 엘.피. | 회전력을 받는 커플러를 구비하는 카트리지 |
| JP7080678B2 (ja) | 2018-03-13 | 2022-06-06 | キヤノン株式会社 | カートリッジ |
| US10338513B1 (en) * | 2018-04-18 | 2019-07-02 | Jiangxi Yibo E-Tech Co., Ltd. | Process cartridge |
| US10416604B1 (en) * | 2018-04-18 | 2019-09-17 | Jiangxi Yibo E-Tech Co.Ltd. | Process cartridge |
| JP7366599B2 (ja) | 2018-06-25 | 2023-10-23 | キヤノン株式会社 | カートリッジ |
| US20210300096A1 (en) * | 2018-11-09 | 2021-09-30 | Hewlett-Packard Development Company, L.P. | Alterations of print drive assemblies |
| WO2020251052A1 (ja) | 2019-06-12 | 2020-12-17 | キヤノン株式会社 | ドラムユニット、駆動伝達ユニット、カートリッジおよび電子写真画像形成装置 |
| US20220227592A1 (en) * | 2019-09-09 | 2022-07-21 | Hewlett-Packard Development Company, L.P. | Peripheral device with gear train protection |
| JP7418109B2 (ja) * | 2019-09-30 | 2024-01-19 | キヤノン株式会社 | 画像形成装置 |
| US11886130B2 (en) | 2019-12-20 | 2024-01-30 | Hewlett-Packard Development Company, L.P. | Print agent applicator positioning devices |
| JPWO2021205666A1 (zh) * | 2020-04-10 | 2021-10-14 | ||
| AU2021345939B2 (en) | 2020-09-17 | 2024-10-10 | Canon Kabushiki Kaisha | Cartridge, drum unit, and image forming apparatus |
| CN114488743A (zh) * | 2020-11-12 | 2022-05-13 | 纳思达股份有限公司 | 处理盒 |
| JP2023043462A (ja) | 2021-09-16 | 2023-03-29 | キヤノン株式会社 | カートリッジ保護組立体 |
Family Cites Families (328)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US899913A (en) | 1907-12-13 | 1908-09-29 | Hugh Robertson Shaw | Power-transmission universal joint. |
| US2300514A (en) | 1940-02-21 | 1942-11-03 | Westinghouse Electric & Mfg Co | Dial attaching device |
| US2292676A (en) | 1941-08-21 | 1942-08-11 | Leon F Thiry | Rubber ball and socket joint |
| US3406534A (en) | 1966-10-10 | 1968-10-22 | Chapper John | Universal coupling |
| US3490841A (en) | 1968-01-15 | 1970-01-20 | Ibm | Photoconductor drum locator |
| US3818380A (en) | 1969-03-28 | 1974-06-18 | R Tyre | Single component controlled rc bridge |
| US3815386A (en) | 1971-02-02 | 1974-06-11 | Kamyr Ab | Device for bleaching of cellulosic pulp |
| US3922883A (en) | 1974-10-03 | 1975-12-02 | Motorola Inc | Anti-backlash universal coupling |
| GB1533868A (en) | 1974-12-28 | 1978-11-29 | Ricoh Kk | Serial printing apparatus |
| US4065941A (en) * | 1975-05-16 | 1978-01-03 | Koto Sangyo Kabushiki Kaisha | Universal joint |
| US4167321A (en) | 1976-09-14 | 1979-09-11 | Olympus Optical Co., Ltd. | Photosensitive drum for electrographic apparatus |
| DE7903031U1 (de) | 1979-02-05 | 1979-07-12 | Basf Ag, 6700 Ludwigshafen | Andruckvorrichtung fuer flexible aufzeichnungstraeger, insbesondere solche in huellen |
| US4433767A (en) | 1979-07-16 | 1984-02-28 | Thor Charles C | Power transmission mechanism |
| JPS57153844A (en) | 1981-03-05 | 1982-09-22 | Sato Co Ltd | Device for printing and pasting label |
| JPS57153844U (zh) | 1981-03-23 | 1982-09-27 | ||
| US4457738A (en) | 1982-04-19 | 1984-07-03 | Xerox Corporation | Anti-backlash double universal flexible coupling |
| JPS59116951U (ja) | 1983-01-25 | 1984-08-07 | 京セラミタ株式会社 | 複写機の動力伝達装置 |
| GB2141520B (en) | 1983-06-08 | 1986-08-28 | Xerox Corp | Drive shaft connector |
| JPS59228281A (ja) | 1983-06-10 | 1984-12-21 | Fuji Xerox Co Ltd | 電子複写機の感光体駆動装置 |
| US4451117A (en) | 1983-11-04 | 1984-05-29 | Goode Robert C | Digital watch magnifying element |
| JPS60249729A (ja) | 1984-05-23 | 1985-12-10 | Fuji Xerox Co Ltd | 脱着可能な2自由度接手 |
| EP0164792B1 (de) | 1984-06-13 | 1988-12-28 | Hasler AG | Vorrichtung zum kraftschlüssigen Verbinden zweier Wellen |
| JPS6192967A (ja) | 1984-10-09 | 1986-05-10 | Nissan Motor Co Ltd | スペアタイヤ格納装置 |
| JPH055575Y2 (zh) | 1984-11-26 | 1993-02-15 | ||
| US4833502A (en) | 1985-07-11 | 1989-05-23 | Canon Kabushiki Kaisha | Image forming apparatus having an image bearing member reciprocally movable in the direction of the rotational axis thereof |
| FR2587509B1 (fr) | 1985-09-17 | 1991-01-04 | Canon Kk | Element de support d'image et mecanisme pour etablir une connexion electrique entre cet element et un appareil de formation d'images |
| DE3631494A1 (de) | 1985-09-17 | 1987-03-26 | Canon Kk | Bildtraegerelement mit zugehoerigem antriebsmechanismus |
| US4835565A (en) | 1986-06-11 | 1989-05-30 | Ricoh Company, Ltd. | Image developing device for electrophotography |
| JPS634252A (ja) | 1986-06-24 | 1988-01-09 | Canon Inc | プロセスカ−トリツジ及びこのカ−トリツジを使用する画像形成装置 |
| US4873549A (en) | 1987-03-03 | 1989-10-10 | Mita Industrial Co., Ltd. | Device for detecting the life of an image forming process unit, opening of a seal of the unit and attachment of the unit to an image forming apparatus |
| JPH01164818A (ja) | 1987-12-20 | 1989-06-28 | Konica Corp | 軸間接続装置 |
| JPH01164818U (zh) | 1988-05-07 | 1989-11-17 | ||
| JPH0271278A (ja) | 1988-09-06 | 1990-03-09 | Ricoh Co Ltd | 画像形成装置 |
| US4915493A (en) | 1989-01-04 | 1990-04-10 | Magna International Inc. | Automotive rear view mirror assembly |
| FR2645607B1 (fr) | 1989-04-07 | 1991-08-16 | Nacam | Dispositif rapide d'accouplement d'arbres menant et mene et son application, notamment a une direction d'automobile |
| JPH02304459A (ja) | 1989-05-19 | 1990-12-18 | Hitachi Ltd | 電子写真プリンタのドラム駆動装置 |
| US5094651A (en) | 1989-06-28 | 1992-03-10 | Cornay Paul J | Universal joint having hemispherical cup-shaped yoke and exterior, lubricating ring |
| US5290203A (en) | 1989-07-25 | 1994-03-01 | Gkn Automotive, Inc. | Constant velocity universal joint having high stress resistance |
| JPH03125166A (ja) | 1989-10-11 | 1991-05-28 | Ricoh Co Ltd | 現像装置 |
| US5128715A (en) | 1990-03-19 | 1992-07-07 | Fuji Xerox Co., Ltd. | Print cartidge and image forming apparatus employing the same |
| JPH03125166U (zh) | 1990-03-30 | 1991-12-18 | ||
| JPH0830168B2 (ja) | 1990-08-20 | 1996-03-27 | 松下電器産業株式会社 | 電子部品用不燃セメント |
| JPH04119363A (ja) | 1990-09-10 | 1992-04-20 | Konica Corp | 画像形成装置 |
| JP3179153B2 (ja) * | 1990-12-25 | 2001-06-25 | 株式会社リコー | 回転型現像装置 |
| JPH04240870A (ja) | 1991-01-25 | 1992-08-28 | Canon Inc | カラー画像形成装置の駆動伝達装置 |
| US5210574A (en) | 1991-03-08 | 1993-05-11 | Mita Industrial Co., Ltd. | Photosensitive drum body-mounting mechanism including a drive coupling member with a coupling protrusion adapted to bite into the inner surface of the mechanism's photosensitive drum |
| JPH04119363U (ja) | 1991-04-05 | 1992-10-26 | 株式会社ゼクセル | ラジアルピストンポンプ |
| KR940009803B1 (ko) | 1991-08-08 | 1994-10-17 | 구인회 | 일정각 속도비의 로울러-캠 치차장치 |
| US5177854A (en) | 1991-10-03 | 1993-01-12 | Xerox Corp | Distortion-free method of mounting an end piece on a thin-walled hollow tube |
| JP3058213B2 (ja) | 1991-12-26 | 2000-07-04 | エヌティエヌ株式会社 | 等速自在継手 |
| US5331373A (en) * | 1992-03-13 | 1994-07-19 | Canon Kabushiki Kaisha | Image forming apparatus, process cartridge mountable within it and method for attaching photosensitive drum to process cartridge |
| JP3347361B2 (ja) * | 1992-06-12 | 2002-11-20 | キヤノン株式会社 | 画像形成装置 |
| JP3352155B2 (ja) * | 1992-06-30 | 2002-12-03 | キヤノン株式会社 | プロセスカートリッジ及び画像形成装置 |
| EP0586033B1 (en) | 1992-06-30 | 1998-03-25 | Canon Kabushiki Kaisha | Photosensitive drum, process cartridge and image forming apparatus |
| JP2999636B2 (ja) | 1992-09-21 | 2000-01-17 | キヤノン株式会社 | 画像形成装置 |
| JP3253186B2 (ja) | 1992-09-24 | 2002-02-04 | キヤノン株式会社 | 円筒に係合部材を結合する結合方法、円筒部材及びプロセスカートリッジ |
| US5463446A (en) * | 1993-05-20 | 1995-10-31 | Canon Kabushiki Kaisha | Rotary member a process cartridge and an assembling method for rolling members |
| JPH06332285A (ja) * | 1993-05-25 | 1994-12-02 | Ricoh Co Ltd | 回転型現像装置 |
| JP3135447B2 (ja) | 1994-01-27 | 2001-02-13 | 富士通株式会社 | 磁気ディスクドライブの制御方法及びその装置 |
| JP3517263B2 (ja) | 1994-02-03 | 2004-04-12 | Ntn株式会社 | 静圧気体軸受スピンドル |
| JPH07217665A (ja) | 1994-02-04 | 1995-08-15 | Sutanree Works Japan:Kk | 自在軸継手及び自在軸継手を含んでなる自在工具 |
| US5816720A (en) * | 1994-03-15 | 1998-10-06 | Interbold | Printer mechanism for automated teller machine |
| JP3869868B2 (ja) | 1994-04-27 | 2007-01-17 | キヤノン株式会社 | プロセスカートリッジ及び画像形成装置 |
| JP3337859B2 (ja) * | 1994-04-26 | 2002-10-28 | キヤノン株式会社 | プロセスカートリッジ及び画像形成装置 |
| US5583618A (en) | 1994-05-31 | 1996-12-10 | Matsushita Electric Industrial Co., Ltd. | Process cartridge and image generating apparatus |
| US5647802A (en) | 1994-06-02 | 1997-07-15 | Torvec, Inc. | Variable-angle gears |
| JPH0830168A (ja) | 1994-07-14 | 1996-02-02 | Tec Corp | 画像形成装置 |
| US5562357A (en) | 1994-08-10 | 1996-10-08 | Larry C. Y. Lee | Snap-fit ball joint |
| US5738586A (en) * | 1994-09-09 | 1998-04-14 | Consolidated Devices Inc. | Semi-universal torque coupling |
| CN1076652C (zh) | 1994-09-26 | 2001-12-26 | 利珀特-尤尼普尔有限公司 | 机械表面处理工具 |
| AU3426895A (en) * | 1994-10-17 | 1996-05-02 | Canon Kabushiki Kaisha | Toner container, toner container assembling method, process cartridge, and electrophotographic image forming apparatus |
| US5599265A (en) * | 1994-12-19 | 1997-02-04 | Xerox Corporation | Barbed ring flange assembly |
| JP3839932B2 (ja) | 1996-09-26 | 2006-11-01 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置及び電子写真感光体ドラム及びカップリング |
| JP2875203B2 (ja) | 1995-03-27 | 1999-03-31 | キヤノン株式会社 | 電子写真画像形成装置、プロセスカートリッジ、駆動力伝達部品、及び、電子写真感光体ドラム |
| JPH08292704A (ja) | 1995-04-21 | 1996-11-05 | Canon Inc | プロセスカートリッジ及び電子写真画像形成装置 |
| JP3323696B2 (ja) | 1995-06-13 | 2002-09-09 | キヤノン株式会社 | アース部材及び電子写真感光体ドラム及びプロセスカートリッジ及び電子写真画像形成装置 |
| JP3315560B2 (ja) * | 1995-06-13 | 2002-08-19 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置及び電子写真感光体ドラムの取り付け方法 |
| JP3372719B2 (ja) * | 1995-07-11 | 2003-02-04 | キヤノン株式会社 | プロセスカートリッジ及び画像形成装置 |
| JP3251152B2 (ja) | 1995-07-26 | 2002-01-28 | キヤノン株式会社 | 現像装置及びプロセスカートリッジ |
| JP3530644B2 (ja) | 1995-07-31 | 2004-05-24 | キヤノン株式会社 | 現像フレーム及びプロセスカートリッジ及び電子写真画像形成装置 |
| JP3359194B2 (ja) | 1995-07-31 | 2002-12-24 | キヤノン株式会社 | 現像ホルダ及びプロセスカートリッジ及び電子写真画像形成装置 |
| JP3402872B2 (ja) * | 1995-08-25 | 2003-05-06 | キヤノン株式会社 | プロセスカートリッジの再生方法及びプロセスカートリッジ |
| JPH0962079A (ja) | 1995-08-25 | 1997-03-07 | Canon Inc | プロセスカートリッジのトナー再充填方法及びプロセスカートリッジ |
| JP3656667B2 (ja) | 1995-12-08 | 2005-06-08 | セイコーエプソン株式会社 | 電子写真方式の像担持体及びこれを用いた画像形成装置 |
| JPH09177807A (ja) | 1995-12-21 | 1997-07-11 | Ricoh Co Ltd | 二軸のジョイント機構 |
| JP3505020B2 (ja) | 1995-12-26 | 2004-03-08 | Ntn株式会社 | 固定型等速自在継手 |
| JP3372418B2 (ja) | 1996-02-21 | 2003-02-04 | 株式会社リコー | 画像形成装置 |
| US5809380A (en) | 1996-03-14 | 1998-09-15 | Matsushita Electric Industrial Co., Ltd. | Color image forming apparatus with plural color units |
| US5983055A (en) | 1996-03-19 | 1999-11-09 | Sharp Kabushiki Kaisha | Photosensitive element for electrophotography |
| US6226478B1 (en) | 1996-03-21 | 2001-05-01 | Canon Kabushiki Kaisha | Process cartridge having drive mount for photosensitive drum |
| US6240266B1 (en) | 1996-03-21 | 2001-05-29 | Canon Kabushiki Kaisha | Process cartridge and drum mount for photosensitive drum |
| US5749028A (en) | 1996-06-26 | 1998-05-05 | Xerox Corporation | Multi-size photoreceptor flange bearing |
| JP3382465B2 (ja) | 1996-07-04 | 2003-03-04 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| JP3372772B2 (ja) * | 1996-07-22 | 2003-02-04 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| JP3332818B2 (ja) * | 1996-08-29 | 2002-10-07 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置及び接続端子の接続方法 |
| JP3363751B2 (ja) * | 1996-08-29 | 2003-01-08 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| JP3323754B2 (ja) | 1996-08-30 | 2002-09-09 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| JP3342362B2 (ja) | 1996-09-20 | 2002-11-05 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| JPH10153938A (ja) * | 1996-09-26 | 1998-06-09 | Canon Inc | 電子写真画像形成装置及びプロセスカートリッジ |
| JP3969805B2 (ja) * | 1996-09-26 | 2007-09-05 | キヤノン株式会社 | 電子写真画像形成装置 |
| JP3745047B2 (ja) * | 1996-09-26 | 2006-02-15 | キヤノン株式会社 | 電子写真画像形成装置及びプロセスカートリッジ |
| JP3492109B2 (ja) | 1996-09-26 | 2004-02-03 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| JP3869913B2 (ja) | 1996-09-30 | 2007-01-17 | キヤノン株式会社 | 電子写真画像形成装置に用いられる円筒部材及びプロセスカートリッジ |
| JPH10133450A (ja) | 1996-11-05 | 1998-05-22 | Matsushita Electric Ind Co Ltd | カラー画像形成装置 |
| JP3352370B2 (ja) | 1996-11-14 | 2002-12-03 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| US5848334A (en) | 1996-11-18 | 1998-12-08 | Xerox Corporation | Drive coupling with plural intimate planar contact |
| JPH10222041A (ja) * | 1996-12-03 | 1998-08-21 | Canon Inc | プロセスカートリッジ及び電子写真画像形成装置 |
| JP3363727B2 (ja) | 1996-12-12 | 2003-01-08 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置及びプロセスカートリッジの組立方法及び廃トナー容器の組立方法 |
| JP3745111B2 (ja) * | 1997-03-18 | 2006-02-15 | キヤノン株式会社 | 結合部材、プロセスカートリッジ、及び、プロセスカートリッジの組立方法 |
| JP3789040B2 (ja) * | 1997-03-28 | 2006-06-21 | キヤノン株式会社 | 電子写真画像形成装置 |
| JPH10331845A (ja) | 1997-05-29 | 1998-12-15 | Minolta Co Ltd | 円筒回転体の支持機構 |
| JP3609919B2 (ja) | 1997-06-19 | 2005-01-12 | 京セラミタ株式会社 | 画像形成装置用の軸継手 |
| JPH1115265A (ja) | 1997-06-20 | 1999-01-22 | Ricoh Co Ltd | 画像形成装置 |
| JP3679614B2 (ja) * | 1997-07-03 | 2005-08-03 | キヤノン株式会社 | シャッター及び現像カートリッジ及び電子写真画像形成装置 |
| JP3728104B2 (ja) | 1997-07-03 | 2005-12-21 | キヤノン株式会社 | 現像カートリッジサイドカバー及び現像カートリッジ |
| JP3799162B2 (ja) * | 1997-07-03 | 2006-07-19 | キヤノン株式会社 | 現像カートリッジ及び電子写真画像形成装置 |
| JPH1173010A (ja) | 1997-07-03 | 1999-03-16 | Canon Inc | 現像カートリッジ及び電子写真画像形成装置 |
| JP3332813B2 (ja) * | 1997-08-01 | 2002-10-07 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| JP3371770B2 (ja) * | 1997-09-08 | 2003-01-27 | 富士ゼロックス株式会社 | 画像形成装置 |
| US6058280A (en) | 1997-11-14 | 2000-05-02 | Xerox Corporation | Molded quick change photoreceptor support |
| JPH11249494A (ja) * | 1998-03-03 | 1999-09-17 | Canon Inc | ドラムフランジ、円筒部材、プロセスカートリッジ、電子写真画像形成装置 |
| JPH11249495A (ja) | 1998-03-03 | 1999-09-17 | Canon Inc | アース部材、円筒部材、プロセスカートリッジ、電子写真画像形成装置 |
| JPH11282326A (ja) | 1998-03-26 | 1999-10-15 | Canon Inc | プロセスカートリッジ及び電子写真画像形成装置 |
| US5845175A (en) | 1998-03-27 | 1998-12-01 | Xerox Corporation | Rigid interference gear mount for enhanced motion quality |
| JPH11282250A (ja) | 1998-03-30 | 1999-10-15 | Canon Inc | 現像装置及びプロセスカートリッジ |
| JPH11282251A (ja) | 1998-03-30 | 1999-10-15 | Canon Inc | 現像装置及びプロセスカートリッジ |
| JPH11303883A (ja) * | 1998-04-22 | 1999-11-02 | Mita Ind Co Ltd | 軸継手、感光体ドラム用動力伝達ユニット及び画像形成装置 |
| US6152826A (en) | 1998-04-29 | 2000-11-28 | Hand Tool Design Corporation | Impact universal joint |
| JPH11325097A (ja) | 1998-05-15 | 1999-11-26 | Koyo Seiko Co Ltd | 軸とヨークの結合構造 |
| JP3439342B2 (ja) | 1998-06-03 | 2003-08-25 | 京セラミタ株式会社 | 画像形成装置 |
| US6615006B2 (en) | 1998-06-30 | 2003-09-02 | Steven Bruce Michlin | Electrical contact device for a developer roller |
| US6546220B1 (en) * | 1998-08-28 | 2003-04-08 | Matsushita Electric Industrial Co., Ltd. | Image forming apparatus with plural color image forming units moveable into image forming position |
| JP2000075732A (ja) * | 1998-08-28 | 2000-03-14 | Matsushita Electric Ind Co Ltd | 像形成ユニット及び画像形成装置 |
| JP2000137360A (ja) | 1998-08-28 | 2000-05-16 | Matsushita Electric Ind Co Ltd | 画像形成装置及びこれに用いる像形成ユニット |
| JP2000120715A (ja) | 1998-10-08 | 2000-04-25 | Shizuo Mishima | 回転運動伝達機構 |
| JP3673658B2 (ja) * | 1998-10-28 | 2005-07-20 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| JP3697090B2 (ja) * | 1998-10-26 | 2005-09-21 | キヤノン株式会社 | 電子写真画像形成装置 |
| JP2000131945A (ja) | 1998-10-26 | 2000-05-12 | Canon Inc | 現像装置およびプロセスカートリッジ |
| JP3684092B2 (ja) * | 1998-10-26 | 2005-08-17 | キヤノン株式会社 | 電子写真画像形成装置 |
| RU2143343C1 (ru) * | 1998-11-03 | 1999-12-27 | Самсунг Электроникс Ко., Лтд. | Микроинжектор и способ изготовления микроинжектора |
| JP3542731B2 (ja) * | 1998-11-27 | 2004-07-14 | シャープ株式会社 | 画像形成装置 |
| JP2000170783A (ja) | 1998-12-03 | 2000-06-20 | Canon Inc | 回転力伝達機構、シート給送装置、及び画像形成装置 |
| US6330410B1 (en) | 1999-02-26 | 2001-12-11 | Brother Kogyo Kabushiki Kaisha | Photosensitive member cartridge |
| JP4219469B2 (ja) | 1999-03-04 | 2009-02-04 | Ntn株式会社 | 等速自在継手 |
| JP3679645B2 (ja) | 1999-03-29 | 2005-08-03 | キヤノン株式会社 | プロセスカートリッジ |
| JP2000280348A (ja) | 1999-04-02 | 2000-10-10 | Canon Inc | 円筒部材およびこれを用いた電子写真感光体ドラム、プロセスカートリッジ |
| US6336012B1 (en) | 1999-04-30 | 2002-01-01 | Canon Kabushiki Kaisha | Developing device, process cartridge and electric energy supply part to developing roller |
| JP3320399B2 (ja) * | 1999-05-20 | 2002-09-03 | キヤノン株式会社 | プロセスカートリッジ及びプロセスカートリッジの組み立て方法及び電子写真画像形成装置 |
| JP3748506B2 (ja) | 1999-05-20 | 2006-02-22 | キヤノン株式会社 | プロセスカートリッジ及びプロセスカートリッジの組立方法 |
| JP3320398B2 (ja) * | 1999-05-20 | 2002-09-03 | キヤノン株式会社 | プロセスカートリッジおよび電子写真画像形成装置 |
| US6118962A (en) | 1999-05-26 | 2000-09-12 | Xerox Corporation | Automatic camming of a developer module |
| SE9902207L (sv) | 1999-06-11 | 2000-12-12 | Sca Hygiene Prod Ab | Användning av fukttät förpackning för absorberande alster innehållande fuktkänsliga tillsatser |
| JP3507372B2 (ja) | 1999-09-03 | 2004-03-15 | キヤノン株式会社 | 現像装置及びプロセスカートリッジ及び電子写真画像形成装置 |
| US6385420B1 (en) | 1999-10-06 | 2002-05-07 | Canon Kabushiki Kaisha | Charging apparatus for contacting and separating charging member by use of moving force of body to be charged |
| JP3679665B2 (ja) | 1999-11-19 | 2005-08-03 | キヤノン株式会社 | 間隙保証部材および現像装置および帯電装置およびプロセスカートリッジ |
| JP3478797B2 (ja) * | 1999-12-28 | 2003-12-15 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| JP2001194954A (ja) | 2000-01-11 | 2001-07-19 | Fuji Xerox Co Ltd | 電子写真感光体に内在させる充填部材の固定方法、並びに、電子写真感光体および電子写真用プロセスカートリッジ |
| JP2001201996A (ja) | 2000-01-18 | 2001-07-27 | Canon Inc | 画像形成装置およびプロセスカートリッジ |
| US6549736B2 (en) * | 2000-01-19 | 2003-04-15 | Canon Kabushiki Kaisha | Process cartridge, engaging member therefor and method for mounting developing roller and magnet |
| US6487278B1 (en) | 2000-02-29 | 2002-11-26 | Ameritech Corporation | Method and system for interfacing systems unified messaging with legacy systems located behind corporate firewalls |
| JP3188439B1 (ja) | 2000-03-07 | 2001-07-16 | キヤノン株式会社 | プロセスカートリッジの再生産方法 |
| JP2002062735A (ja) | 2000-06-09 | 2002-02-28 | Canon Inc | 現像装置 |
| CN1237416C (zh) * | 2000-06-09 | 2006-01-18 | 佳能株式会社 | 显影装置、处理盒、显影框架与显影剂框架之间的连接方法和柔性密封件 |
| JP3283501B2 (ja) | 2000-06-28 | 2002-05-20 | キヤノン株式会社 | プロセスカートリッジの再生産方法 |
| JP3716716B2 (ja) | 2000-07-10 | 2005-11-16 | 富士ゼロックス株式会社 | 回転体の駆動装置及びこれを用いた画像形成装置 |
| JP4514170B2 (ja) | 2000-07-11 | 2010-07-28 | キヤノン株式会社 | カップリング装置及びこれを備えた画像形成装置 |
| JP4046933B2 (ja) * | 2000-08-02 | 2008-02-13 | キヤノン株式会社 | 駆動伝達装置及びこれを備える画像形成装置 |
| US6301458B1 (en) * | 2000-08-03 | 2001-10-09 | Toshiba Tec Kabushiki Kaisha | Image forming apparatus |
| US6549738B2 (en) | 2000-08-30 | 2003-04-15 | Oki Data Corporation | Image forming cartridge and image forming apparatus having a photoreceptor drum that rotates at a constant velocity and is stably grounded |
| US6349191B1 (en) * | 2000-10-02 | 2002-02-19 | Xerox Corporation | Replaceable container assembly for storing material for delivery to or from a printing machine |
| JP2002182446A (ja) * | 2000-10-04 | 2002-06-26 | Canon Inc | 駆動力伝達部品および電子写真感光体ドラムおよびプロセスカートリッジおよび電子写真画像形成装置 |
| US6829455B2 (en) * | 2000-10-20 | 2004-12-07 | Canon Kabushiki Kaisha | Driving force transmission mechanism, image forming apparatus equipped with such a mechanism, and process unit of such an apparatus |
| KR100402391B1 (ko) | 2000-10-26 | 2003-10-22 | 삼성전자주식회사 | 메모리 카드 시스템 |
| JP3432218B2 (ja) * | 2000-10-31 | 2003-08-04 | キヤノン株式会社 | プロセスカートリッジ、負荷発生部材及び電子写真画像形成装置 |
| US6490426B1 (en) | 2000-11-03 | 2002-12-03 | Xerox Corporation | Modular imaging member flange assembly |
| JP3667243B2 (ja) | 2000-12-01 | 2005-07-06 | キヤノン株式会社 | プロセスカートリッジ及びプロセスカートリッジの装着機構及び電子写真画像形成装置 |
| JP2002244382A (ja) | 2000-12-13 | 2002-08-30 | Canon Inc | プロセスカートリッジ及び電気接点部材及び電子写真画像形成装置 |
| JP3658315B2 (ja) * | 2000-12-19 | 2005-06-08 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| JP4677093B2 (ja) * | 2000-12-25 | 2011-04-27 | キヤノン株式会社 | プロセスカートリッジ |
| US6654580B2 (en) | 2000-12-27 | 2003-11-25 | Matsushita Electric Industrial Co., Ltd. | Image forming apparatus |
| US6397029B1 (en) | 2001-01-11 | 2002-05-28 | Lexmark International, Inc | Coupler for an image-forming apparatus |
| JP3985453B2 (ja) | 2001-01-12 | 2007-10-03 | 松下電工株式会社 | 電力変換装置 |
| US6714746B2 (en) * | 2001-01-23 | 2004-03-30 | Canon Kabushiki Kaisha | Image forming apparatus rotationally driving image bearing member and contact electrifying member of process cartridge and process cartridge comprising image bearing member and contact electrifying member |
| JP3542583B2 (ja) | 2001-02-02 | 2004-07-14 | キヤノン株式会社 | プロセスカートリッジ及び電子写真感光体ドラム及び電子写真画像形成装置及びカラー電子写真画像形成装置 |
| JP4240825B2 (ja) | 2001-02-21 | 2009-03-18 | いすゞ自動車株式会社 | 変速機のシフトアクチュエータ |
| JP2002258551A (ja) | 2001-02-28 | 2002-09-11 | Canon Inc | 電子写真画像形成装置及びプロセスカートリッジ |
| JP4672885B2 (ja) | 2001-03-01 | 2011-04-20 | キヤノン株式会社 | 現像装置及びプロセスカートリッジ |
| US6699550B2 (en) | 2001-04-12 | 2004-03-02 | Bridgestone Corporation | Base-body for photosensitive drum and photosensitive drum with the use of the same |
| JP3542569B2 (ja) * | 2001-04-27 | 2004-07-14 | キヤノン株式会社 | プロセスカートリッジの再生産方法 |
| JP3840063B2 (ja) * | 2001-04-27 | 2006-11-01 | キヤノン株式会社 | プロセスカートリッジ |
| JP4310069B2 (ja) | 2001-04-27 | 2009-08-05 | キヤノン株式会社 | 磁気シールを有する現像装置 |
| JP3564080B2 (ja) | 2001-04-27 | 2004-09-08 | キヤノン株式会社 | プロセスカートリッジの再生産方法 |
| EP1415387A4 (en) | 2001-07-05 | 2006-08-23 | Power One Inc | METHOD AND DEVICE FOR CONTROLLING SYNCHRONOUS RECTIFIER OF A CURRENT TRANSFORMER |
| JP4447191B2 (ja) | 2001-09-12 | 2010-04-07 | 株式会社リコー | 駆動機構の軸受構造、画像読取装置および画像形成装置 |
| JP2003162203A (ja) * | 2001-09-13 | 2003-06-06 | Canon Inc | ユニット及び現像カートリッジ及びプロセスカートリッジ及びトナーカートリッジ及び電子写真画像形成装置 |
| KR100381598B1 (ko) | 2001-09-18 | 2003-04-26 | 삼성전자주식회사 | 커플링장치와 현상카트리지 및 이를 채용한 전자사진방식인쇄기 |
| US6517439B1 (en) | 2001-09-19 | 2003-02-11 | Maytag Corporation | U-joint construction |
| KR100381601B1 (ko) * | 2001-09-26 | 2003-04-26 | 삼성전자주식회사 | 커플링장치와 현상카트리지 및 이를 채용한 전자사진방식인쇄기 |
| JP4240870B2 (ja) | 2001-10-15 | 2009-03-18 | 出光興産株式会社 | プロピレン−エチレンランダム共重合体及びその製造方法 |
| KR100423475B1 (ko) | 2001-11-27 | 2004-03-18 | 삼성전자주식회사 | 커플링장치 |
| JP2003162137A (ja) | 2001-11-27 | 2003-06-06 | Canon Inc | トナーカートリッジ |
| US6572480B1 (en) | 2001-12-05 | 2003-06-03 | Visteon Global Technologies, Inc. | Polygon universal joint |
| JP3793457B2 (ja) | 2001-12-27 | 2006-07-05 | 京セラミタ株式会社 | 画像形成装置用の駆動機構 |
| JP2003202727A (ja) | 2002-01-08 | 2003-07-18 | Canon Inc | 画像形成装置 |
| US6795671B2 (en) | 2002-01-15 | 2004-09-21 | Canon Kabushiki Kaisha | Image forming apparatus featuring switchable, contact and spaced, clutch-operated developing units |
| JP2003215917A (ja) | 2002-01-24 | 2003-07-30 | Canon Inc | 現像装置、プロセスカートリッジ及び画像形成装置 |
| JP3595798B2 (ja) | 2002-01-31 | 2004-12-02 | キヤノン株式会社 | プロセスカートリッジおよび電子写真画像形成装置 |
| JP2003247535A (ja) | 2002-02-26 | 2003-09-05 | Bridgestone Corp | 円筒状支持体 |
| US6947677B2 (en) | 2002-02-26 | 2005-09-20 | Canon Kabushiki Kaisha | Image forming apparatus with developing apparatus and method thereof |
| JP4072362B2 (ja) | 2002-03-14 | 2008-04-09 | キヤノン株式会社 | 現像装置及びプロセスカートリッジ及び画像形成装置 |
| JP3997817B2 (ja) | 2002-04-02 | 2007-10-24 | ブラザー工業株式会社 | 現像装置および画像形成装置 |
| JP2003307992A (ja) * | 2002-04-17 | 2003-10-31 | Canon Inc | プロセスカートリッジ及び電子写真画像形成装置 |
| JP2003307931A (ja) * | 2002-04-17 | 2003-10-31 | Canon Inc | プロセスカートリッジ及び電子写真画像形成装置 |
| JP2003307993A (ja) * | 2002-04-17 | 2003-10-31 | Canon Inc | 電子写真感光体ドラム、プロセスカートリッジ及び電子写真画像形成装置 |
| JP4174380B2 (ja) * | 2002-07-04 | 2008-10-29 | キヤノン株式会社 | 電子写真感光体ドラム及びプロセスカートリッジ |
| JP2004045603A (ja) * | 2002-07-10 | 2004-02-12 | Konica Minolta Holdings Inc | 画像形成装置 |
| JP2004085593A (ja) | 2002-08-22 | 2004-03-18 | Ricoh Co Ltd | 現像担持体への駆動伝達装置および駆動伝達方法、ならびに画像形成装置 |
| JP2004101690A (ja) | 2002-09-06 | 2004-04-02 | Canon Inc | 現像装置及びプロセスカートリッジ及び電子写真画像形成装置 |
| EP1567318B1 (de) | 2002-09-13 | 2006-05-03 | Polymold Ag | Spritzvorrichtung mit in einer spritzdornhalterung eingesetzten temperierbaren spritzdornen zum blasformen von kunststoffhohlkörpern |
| US7035573B2 (en) | 2002-09-24 | 2006-04-25 | Canon Kabushiki Kaisha | Developing apparatus having developer carrying screw with a plurality of inclination angles |
| JP4314006B2 (ja) * | 2002-09-30 | 2009-08-12 | キヤノン株式会社 | 画像形成装置 |
| JP3913153B2 (ja) | 2002-09-30 | 2007-05-09 | キヤノン株式会社 | 給電接点部材及びプロセスカートリッジ及び画像形成装置 |
| JP3944045B2 (ja) | 2002-09-30 | 2007-07-11 | キヤノン株式会社 | 現像剤供給容器及び電子写真画像形成装置 |
| JP2004144240A (ja) | 2002-10-25 | 2004-05-20 | Ntn Corp | トリポード型等速自在継手 |
| JP2004151563A (ja) | 2002-10-31 | 2004-05-27 | Canon Inc | プロセスカートリッジの再生産方法 |
| JP4047135B2 (ja) | 2002-10-31 | 2008-02-13 | キヤノン株式会社 | トナー補給容器の再生産方法 |
| JP3970161B2 (ja) | 2002-11-08 | 2007-09-05 | キヤノン株式会社 | プロセスカートリッジの再生産方法 |
| CA2504597A1 (en) | 2002-11-19 | 2004-06-03 | William D. Himes | Developer cartridge including rim |
| JP2004177835A (ja) | 2002-11-29 | 2004-06-24 | Canon Inc | 部品及び部品の供給方法 |
| JP4018517B2 (ja) | 2002-11-29 | 2007-12-05 | キヤノン株式会社 | 部品 |
| JP2004198822A (ja) | 2002-12-19 | 2004-07-15 | Fuji Xerox Co Ltd | 駆動力伝達装置、および画像形成装置 |
| US6869366B2 (en) * | 2002-12-19 | 2005-03-22 | Easco Hand Tools Inc. | Universal joint |
| CN1205459C (zh) | 2002-12-26 | 2005-06-08 | 上海华辰科技发展有限公司 | 涵洞式流量计 |
| GB2397136A (en) | 2003-01-10 | 2004-07-14 | Gcc Man Ltd | A toner cartridge |
| JP2004246058A (ja) | 2003-02-13 | 2004-09-02 | Fuji Xerox Co Ltd | 画像形成装置 |
| JP4228196B2 (ja) | 2003-02-21 | 2009-02-25 | Nok株式会社 | 画像形成ドラム用防振ゴム及びその組立方法 |
| US7121205B2 (en) * | 2003-03-14 | 2006-10-17 | Ricoh Company, Limited | Device for and method of coupling shafts, image formation apparatus, process cartridge, and belt unit |
| CN101369111B (zh) | 2003-05-22 | 2011-08-17 | 三菱化学株式会社 | 感光体鼓、组装其的方法和设备以及使用其的成像设备 |
| JP4126254B2 (ja) | 2003-06-30 | 2008-07-30 | 株式会社リコー | 画像形成装置 |
| JP4227488B2 (ja) | 2003-08-29 | 2009-02-18 | キヤノン株式会社 | 駆動伝達装置及び画像形成装置 |
| JP2005077743A (ja) * | 2003-08-29 | 2005-03-24 | Canon Inc | 現像フレーム、プロセスカートリッジ及び電子写真画像形成装置 |
| JP3970217B2 (ja) | 2003-08-29 | 2007-09-05 | キヤノン株式会社 | 電子写真画像形成装置 |
| JP4681833B2 (ja) * | 2003-09-19 | 2011-05-11 | 株式会社リコー | 画像形成装置 |
| JP2005148445A (ja) | 2003-11-17 | 2005-06-09 | Canon Inc | 現像装置、プロセスカートリッジ、電子写真画像形成装置及び端部規制部材 |
| US7020410B2 (en) | 2003-11-21 | 2006-03-28 | Mitsubishi Chemical America, Inc. | Grounding plate assembly for a drum in an image forming apparatus |
| JP2005156654A (ja) * | 2003-11-21 | 2005-06-16 | Canon Inc | 帯電装置、プロセスカートリッジおよび画像形成装置 |
| JP3782807B2 (ja) | 2003-11-28 | 2006-06-07 | キヤノン株式会社 | プロセスカートリッジ、及び電子写真感光体ドラムの取り付け方法 |
| JP4049736B2 (ja) | 2003-11-28 | 2008-02-20 | 京セラミタ株式会社 | 画像形成装置 |
| JP4652783B2 (ja) | 2003-12-10 | 2011-03-16 | キヤノン株式会社 | 現像剤供給容器 |
| JP4110143B2 (ja) * | 2004-01-30 | 2008-07-02 | キヤノン株式会社 | 電子写真画像形成装置、電子写真画像形成装置に着脱可能なユニット及びプロセスカートリッジ |
| US7228090B2 (en) | 2004-02-26 | 2007-06-05 | Konica Minolta Business Technologies, Inc. | Image forming apparatus with a removable process unit capable of securing rotation transmission accuracy without stressing a holding portion despite shaft misalignment |
| US7164875B2 (en) * | 2004-03-30 | 2007-01-16 | Canon Kabushiki Kaisha | Electrophotographic image forming apparatus having a plurality of mounting portions for detachably mounting a plurality process cartridges |
| JP3885062B2 (ja) * | 2004-03-30 | 2007-02-21 | キヤノン株式会社 | 電子写真感光体ドラム、プロセスカートリッジおよび電子写真画像形成装置 |
| JP3970274B2 (ja) * | 2004-03-31 | 2007-09-05 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| JP4656558B2 (ja) | 2004-04-09 | 2011-03-23 | 株式会社三共 | 会員サービス提供システム |
| JP4110128B2 (ja) * | 2004-04-26 | 2008-07-02 | キヤノン株式会社 | プロセスカートリッジ、電子写真画像形成装置及び軸受部材 |
| JP2005316192A (ja) * | 2004-04-28 | 2005-11-10 | Canon Inc | 電子写真画像形成装置 |
| JP3840232B2 (ja) * | 2004-05-06 | 2006-11-01 | キヤノン株式会社 | プロセスカートリッジ |
| JP3885074B2 (ja) * | 2004-05-11 | 2007-02-21 | キヤノン株式会社 | 電子写真感光体ドラム、プロセスカートリッジ、及び電子写真画像形成装置 |
| JP4604550B2 (ja) | 2004-05-24 | 2011-01-05 | ブラザー工業株式会社 | 画像形成装置およびプロセスカートリッジ |
| WO2005124188A1 (ja) | 2004-06-22 | 2005-12-29 | Nobuyoshi Sugitani | 歯車機構、遊星歯車装置、および回転軸受装置並びに不思議遊星歯車減速装置 |
| EP1610188B1 (en) | 2004-06-22 | 2012-03-07 | Brother Kogyo Kabushiki Kaisha | Image-forming device |
| US7366443B2 (en) * | 2004-06-22 | 2008-04-29 | Ntn Corporation | Constant-velocity joint and image-forming device |
| US20050286933A1 (en) | 2004-06-28 | 2005-12-29 | Samsung Electronics Co., Ltd. | Roller for image forming apparatus and method of manufacturing same |
| US20060008289A1 (en) * | 2004-07-06 | 2006-01-12 | Canon Kabushiki Kaisha | Electrophotographic image forming apparatus and process cartridge |
| EP1774411A2 (en) | 2004-07-26 | 2007-04-18 | GCC IP Pty Limited | Driving force member |
| JP2006039364A (ja) | 2004-07-29 | 2006-02-09 | Canon Inc | ドラム駆動力伝達装置、プロセスカートリッジ及び電子写真画像形成装置 |
| JP3970279B2 (ja) | 2004-07-30 | 2007-09-05 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| US7457570B2 (en) | 2004-08-06 | 2008-11-25 | Ricoh Company, Ltd. | Image forming apparatus including a magnetic brush developing system using a two-component developer comprising toner and carrier |
| KR100605165B1 (ko) * | 2004-08-13 | 2006-07-28 | 삼성전자주식회사 | 화상형성장치 |
| JP3826148B2 (ja) | 2004-08-26 | 2006-09-27 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| JP4431467B2 (ja) * | 2004-09-03 | 2010-03-17 | 株式会社リコー | 画像形成装置。 |
| JP4617122B2 (ja) | 2004-09-08 | 2011-01-19 | キヤノン株式会社 | 現像剤搬送部材、現像装置、および、プロセスカートリッジ |
| JP4711755B2 (ja) | 2004-09-13 | 2011-06-29 | Ntn株式会社 | 画像形成装置 |
| JP2006084935A (ja) | 2004-09-17 | 2006-03-30 | Ricoh Co Ltd | 軸連結装置、その連結装置を有する伝動装置及び該伝動装置を有する画像形成装置 |
| JP4621094B2 (ja) | 2004-09-20 | 2011-01-26 | オセ−テクノロジーズ・ベー・ヴエー | 画像位置合せ装置 |
| US7289752B2 (en) | 2004-09-24 | 2007-10-30 | Ntn Corporation | Tripod type constant-velocity joint and image-forming device |
| JP4886182B2 (ja) * | 2004-09-27 | 2012-02-29 | キヤノン株式会社 | カートリッジ、プロセスカートリッジ、及び、電子写真画像形成装置 |
| JP3950882B2 (ja) * | 2004-10-06 | 2007-08-01 | キヤノン株式会社 | 電子写真画像形成装置 |
| JP3950883B2 (ja) * | 2004-10-06 | 2007-08-01 | キヤノン株式会社 | 電子写真画像形成装置 |
| JP4710476B2 (ja) * | 2004-10-28 | 2011-06-29 | ブラザー工業株式会社 | 画像形成装置 |
| JP2006133436A (ja) | 2004-11-05 | 2006-05-25 | Oki Data Corp | 画像形成装置 |
| JP4799851B2 (ja) | 2004-11-15 | 2011-10-26 | 株式会社リコー | 画像形成装置 |
| JP4711669B2 (ja) | 2004-12-10 | 2011-06-29 | Ntn株式会社 | 画像形成装置 |
| JP5049486B2 (ja) * | 2004-12-13 | 2012-10-17 | キヤノン株式会社 | 画像形成装置及びそれに適用される像担持ユニット |
| JP4526400B2 (ja) | 2005-01-26 | 2010-08-18 | 京セラミタ株式会社 | 軸継ぎ手及びこれを備えた画像形成装置 |
| JP4239100B2 (ja) | 2005-01-31 | 2009-03-18 | ブラザー工業株式会社 | 現像カートリッジ及び画像形成装置 |
| JP2006208916A (ja) * | 2005-01-31 | 2006-08-10 | Ricoh Co Ltd | 画像形成装置 |
| JP2006284622A (ja) | 2005-03-31 | 2006-10-19 | Konica Minolta Business Technologies Inc | 画像形成装置 |
| JP4794892B2 (ja) | 2005-04-11 | 2011-10-19 | キヤノン株式会社 | プロセスカートリッジ及び電子写真画像形成装置 |
| JP4603441B2 (ja) | 2005-07-29 | 2010-12-22 | Ntn株式会社 | 等速ジョイント |
| CN1851282B (zh) * | 2005-04-21 | 2012-06-27 | Ntn株式会社 | 等速联轴器及图像形成装置 |
| JP2007052185A (ja) | 2005-08-17 | 2007-03-01 | Ntn Corp | 画像形成装置 |
| KR100608067B1 (ko) | 2005-04-22 | 2006-08-02 | 삼성전자주식회사 | 감광드럼 및 이를 구비한 현상 카트리지와 화상형성장치 |
| JP4681946B2 (ja) * | 2005-05-27 | 2011-05-11 | キヤノン株式会社 | プロセスカートリッジ、現像カートリッジ及び電子写真画像形成装置 |
| KR100636239B1 (ko) | 2005-06-02 | 2006-10-19 | 삼성전자주식회사 | 전자사진방식 칼라화상형성장치 |
| US8010011B2 (en) | 2005-07-05 | 2011-08-30 | Katun Corporation | Removably mountable frame for an image processsing apparatus, a removably mountable adaptor for an image processing apparatus and cartridges for use with a removably frame and removably mountable adaptor |
| JP2007051692A (ja) | 2005-08-18 | 2007-03-01 | Mitsuya Kenkyusho:Kk | ユニバーサルジョイント |
| US7236722B2 (en) | 2005-08-25 | 2007-06-26 | Lexmark International, Inc. | Helically splined drive member for an image forming device |
| JP2007069868A (ja) | 2005-09-09 | 2007-03-22 | Nissan Motor Co Ltd | ステアリング装置のシャフトジョイント構造及びステアリング装置 |
| JP4536628B2 (ja) | 2005-09-16 | 2010-09-01 | 株式会社リコー | 画像形成装置、プロセスカートリッジ、画像形成方法 |
| JP2007121774A (ja) | 2005-09-27 | 2007-05-17 | Ricoh Co Ltd | 回転体駆動装置及び画像形成装置 |
| JP2007147881A (ja) | 2005-11-25 | 2007-06-14 | Brother Ind Ltd | 現像カートリッジおよび画像形成装置 |
| JP4487927B2 (ja) | 2005-12-26 | 2010-06-23 | ブラザー工業株式会社 | 画像形成装置 |
| JP4386034B2 (ja) | 2005-12-27 | 2009-12-16 | ブラザー工業株式会社 | 画像形成装置 |
| JP4240326B2 (ja) | 2005-12-27 | 2009-03-18 | ブラザー工業株式会社 | 画像形成装置および現像カートリッジ |
| JP4796396B2 (ja) | 2006-01-27 | 2011-10-19 | 京セラミタ株式会社 | 画像形成装置 |
| JP4758247B2 (ja) * | 2006-02-20 | 2011-08-24 | 株式会社東芝 | 駆動伝達機構およびこれを備えた画像形成装置 |
| JP4802796B2 (ja) * | 2006-03-23 | 2011-10-26 | ブラザー工業株式会社 | 現像カートリッジ、像担持体ユニットおよび画像形成装置 |
| JP4600331B2 (ja) | 2006-03-29 | 2010-12-15 | ブラザー工業株式会社 | 画像形成装置 |
| KR100788037B1 (ko) | 2006-04-05 | 2007-12-24 | 주식회사 파캔오피씨 | 프린터 카트리지용 감광성 드럼 및 이의 장착방법 |
| JP4364214B2 (ja) | 2006-05-13 | 2009-11-11 | 村田機械株式会社 | 駆動伝達機構及びこれを用いた画像形成装置 |
| US7942426B2 (en) | 2006-07-12 | 2011-05-17 | Black & Decker Inc. | Pivotal/rigid accessories for power and hand tools |
| KR101248870B1 (ko) | 2006-08-25 | 2013-03-28 | 삼성전자주식회사 | 토너 공급장치, 그 토너 공급장치를 구비하는 현상장치 및화상형성장치 |
| US20080102966A1 (en) | 2006-10-27 | 2008-05-01 | Torvec, Inc. | Spherical Universal Coupling |
| US7537410B2 (en) | 2006-10-31 | 2009-05-26 | Xerox Corporation | Coupling apparatus |
| JP4498407B2 (ja) * | 2006-12-22 | 2010-07-07 | キヤノン株式会社 | プロセスカートリッジ、電子写真画像形成装置、及び、電子写真感光体ドラムユニット |
| JP4948382B2 (ja) | 2006-12-22 | 2012-06-06 | キヤノン株式会社 | 感光ドラム取り付け用カップリング部材 |
| JP4095649B1 (ja) | 2006-12-28 | 2008-06-04 | キヤノン株式会社 | 電子写真画像形成装置、プロセスカートリッジ、及び移動部材 |
| JP5311854B2 (ja) | 2007-03-23 | 2013-10-09 | キヤノン株式会社 | 電子写真画像形成装置、現像装置、及び、カップリング部材 |
| US7630667B2 (en) | 2007-05-07 | 2009-12-08 | General Plastic Industrial Co., Ltd. | Supporting apparatus for a photosensitive drum |
| US7664436B2 (en) | 2007-05-15 | 2010-02-16 | Canon Kabushiki Kaisha | Color electrophotographic image forming apparatus |
| JP4604063B2 (ja) | 2007-06-11 | 2010-12-22 | キヤノン株式会社 | 画像形成装置 |
| JP5135031B2 (ja) * | 2007-10-05 | 2013-01-30 | 株式会社リコー | 連結装置および画像形成装置 |
| KR20090044054A (ko) | 2007-10-31 | 2009-05-07 | 삼성전자주식회사 | 감광체, 이를 구비하는 화상형성장치 및 감광체의 조립방법 |
| JP5328230B2 (ja) | 2008-06-10 | 2013-10-30 | キヤノン株式会社 | カートリッジ、及び、前記カートリッジを用いた電子写真画像形成装置 |
| JP5371627B2 (ja) | 2008-08-27 | 2013-12-18 | キヤノン株式会社 | 現像装置、現像カートリッジ、及び、電子写真画像形成装置 |
| JP5029664B2 (ja) | 2009-09-09 | 2012-09-19 | ブラザー工業株式会社 | 画像形成装置およびカートリッジ |
-
2007
- 2007-12-21 JP JP2007330304A patent/JP4948382B2/ja active Active
- 2007-12-24 TW TW101141806A patent/TWI499873B/zh active
- 2007-12-24 TW TW096149779A patent/TWI456363B/zh active
- 2007-12-24 TW TW098135942A patent/TWI429828B/zh active
- 2007-12-24 TW TW101141802A patent/TWI501052B/zh active
- 2007-12-24 TW TW104120724A patent/TWI631436B/zh active
- 2007-12-24 TW TW106134075A patent/TWI638248B/zh active
- 2007-12-25 CA CA3006479A patent/CA3006479C/en active Active
- 2007-12-25 KR KR1020127023226A patent/KR101367028B1/ko active IP Right Grant
- 2007-12-25 KR KR1020097015474A patent/KR101082200B1/ko active IP Right Grant
- 2007-12-25 CN CN201510660802.XA patent/CN105446106B/zh active Active
- 2007-12-25 CA CA2883912A patent/CA2883912C/en active Active
- 2007-12-25 EP EP07860561.5A patent/EP2062099B1/en active Active
- 2007-12-25 KR KR1020127023228A patent/KR101366926B1/ko active IP Right Grant
- 2007-12-25 BR BRPI0721104-0 patent/BRPI0721104B1/pt active IP Right Grant
- 2007-12-25 SG SG2011095817A patent/SG191446A1/en unknown
- 2007-12-25 CN CN201310275129.9A patent/CN103383534B/zh active Active
- 2007-12-25 KR KR1020117016749A patent/KR101367055B1/ko active IP Right Grant
- 2007-12-25 SG SG10201507914WA patent/SG10201507914WA/en unknown
- 2007-12-25 CN CN201310276178.4A patent/CN103345135B/zh active Active
- 2007-12-25 MX MX2016013174A patent/MX347646B/es unknown
- 2007-12-25 MX MX2009005493A patent/MX2009005493A/es active IP Right Grant
- 2007-12-25 EP EP18207343.7A patent/EP3486729B1/en active Active
- 2007-12-25 CA CA3113338A patent/CA3113338A1/en active Pending
- 2007-12-25 MX MX2015013764A patent/MX342692B/es unknown
- 2007-12-25 AU AU2007340402A patent/AU2007340402B2/en active Active
- 2007-12-25 WO PCT/JP2007/075366 patent/WO2008081966A1/en active Application Filing
- 2007-12-25 BR BR122015016845A patent/BR122015016845B1/pt active IP Right Grant
- 2007-12-25 KR KR1020117016752A patent/KR101367045B1/ko active IP Right Grant
- 2007-12-25 CN CN201310276196.2A patent/CN103345138B/zh active Active
- 2007-12-25 KR KR1020097025688A patent/KR101216915B1/ko active IP Right Grant
- 2007-12-25 SG SG2010065621A patent/SG179297A1/en unknown
- 2007-12-25 CA CA3041252A patent/CA3041252C/en active Active
- 2007-12-25 CN CN201310276561.XA patent/CN103324057B/zh active Active
- 2007-12-25 MY MYPI20092604A patent/MY158797A/en unknown
- 2007-12-25 DE DE112007003046.1T patent/DE112007003046B4/de active Active
- 2007-12-25 CN CN2007800475121A patent/CN101583910B/zh active Active
- 2007-12-25 CA CA2670072A patent/CA2670072C/en active Active
- 2007-12-25 MY MYPI2015002565A patent/MY182592A/en unknown
- 2007-12-25 CN CN201310275156.6A patent/CN103439870B/zh active Active
- 2007-12-26 US US11/964,469 patent/US8295734B2/en active Active
-
2009
- 2009-05-25 MX MX2020011123A patent/MX2020011123A/es unknown
- 2009-12-31 HK HK09112355.5A patent/HK1132339A1/xx unknown
-
2012
- 2012-07-18 RU RU2012130771/28A patent/RU2521160C2/ru active
- 2012-09-14 US US13/617,916 patent/US8452210B2/en active Active
- 2012-12-04 US US13/693,656 patent/US8532533B2/en active Active
-
2013
- 2013-07-30 US US13/953,779 patent/US9176468B2/en active Active
- 2013-12-04 US US14/096,738 patent/US8676090B1/en active Active
-
2014
- 2014-02-06 HK HK14101113.4A patent/HK1187991A1/zh unknown
- 2014-02-26 HK HK14101842.2A patent/HK1188835A1/zh unknown
- 2014-04-18 RU RU2014115669A patent/RU2612948C2/ru active
-
2015
- 2015-06-02 US US14/728,722 patent/US9772602B2/en active Active
-
2016
- 2016-06-13 HK HK16106776.9A patent/HK1218786A1/zh unknown
-
2017
- 2017-03-06 RU RU2017107188A patent/RU2656290C1/ru active
- 2017-09-14 US US15/704,421 patent/US10209670B2/en active Active
-
2018
- 2018-05-22 RU RU2018118790A patent/RU2698283C1/ru active
- 2018-12-28 US US16/234,808 patent/US10429794B2/en active Active
-
2019
- 2019-08-08 RU RU2019125159A patent/RU2719734C1/ru active
- 2019-09-09 US US16/564,646 patent/US10845756B2/en active Active
-
2020
- 2020-04-14 RU RU2020113454A patent/RU2730747C1/ru active
- 2020-08-20 RU RU2020127733A patent/RU2747373C1/ru active
- 2020-10-22 US US17/076,968 patent/US11156956B2/en active Active
-
2021
- 2021-04-23 RU RU2021111621A patent/RU2766426C1/ru active
Cited By (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103592831A (zh) * | 2010-09-20 | 2014-02-19 | 科企有限公司 | 感光鼓连接组件 |
| CN102478769A (zh) * | 2010-11-19 | 2012-05-30 | 珠海赛纳打印科技股份有限公司 | 一种感光鼓驱动组件 |
| CN102478769B (zh) * | 2010-11-19 | 2014-08-27 | 珠海赛纳打印科技股份有限公司 | 一种感光鼓驱动组件 |
| US11619905B2 (en) | 2011-12-06 | 2023-04-04 | Canon Kabushiki Kaisha | Cartridge detachably mountable to main assembly of electrophotographic image forming apparatus, assembling method for drive transmitting device for photosensitive drum, and electrophotographic image forming apparatus |
| US11163259B2 (en) | 2011-12-06 | 2021-11-02 | Canon Kabushiki Kaisha | Cartridge detachably mountable to main assembly of electrophotographic image forming apparatus, assembling method for drive transmitting device for photosensitive drum, and electrophotographic image forming apparatus |
| CN109116707A (zh) * | 2011-12-06 | 2019-01-01 | 佳能株式会社 | 盒、感光鼓传动装置组装方法及电子照相成像设备 |
| US11199807B2 (en) | 2013-09-12 | 2021-12-14 | Canon Kabushiki Kaisha | Cartridge and drum unit for electrophotographic image forming apparatus |
| US11579561B2 (en) | 2013-09-12 | 2023-02-14 | Canon Kabushiki Kaisha | Cartridge and drum unit for electrophotographic image forming apparatus |
| US12066786B2 (en) | 2013-09-12 | 2024-08-20 | Canon Kabushiki Kaisha | Cartridge and drum unit for electrophotographic image forming apparatus |
| CN110426934A (zh) * | 2013-09-12 | 2019-11-08 | 佳能株式会社 | 用于电子照相式成像装置的盒和鼓单元 |
| US12130579B2 (en) | 2013-09-12 | 2024-10-29 | Canon Kabushiki Kaisha | Cartridge and drum unit for electrophotographic image forming apparatus |
| CN110426939A (zh) * | 2013-09-12 | 2019-11-08 | 佳能株式会社 | 用于电子照相式成像装置的盒和鼓单元 |
| CN104516224A (zh) * | 2013-09-29 | 2015-04-15 | 珠海凯威置业有限公司 | 一种旋转力驱动组件以及处理盒 |
| WO2015043339A1 (zh) * | 2013-09-29 | 2015-04-02 | 珠海赛纳打印科技股份有限公司 | 一种旋转力驱动组件以及处理盒 |
| CN104516224B (zh) * | 2013-09-29 | 2018-10-09 | 纳思达股份有限公司 | 一种旋转力驱动组件以及处理盒 |
| WO2015158274A1 (zh) * | 2014-04-16 | 2015-10-22 | 珠海艾派克科技股份有限公司 | 一种处理盒 |
| CN105319891B (zh) * | 2014-07-17 | 2017-12-26 | 京瓷办公信息系统株式会社 | 驱动传递机构及具备其的图像形成装置 |
| CN105319891A (zh) * | 2014-07-17 | 2016-02-10 | 京瓷办公信息系统株式会社 | 驱动传递机构及具备其的图像形成装置 |
| CN105739267B (zh) * | 2014-12-26 | 2018-09-04 | 佳能株式会社 | 成像设备 |
| CN105739267A (zh) * | 2014-12-26 | 2016-07-06 | 佳能株式会社 | 成像设备 |
| CN113267981B (zh) * | 2015-02-27 | 2024-04-26 | 佳能株式会社 | 盒 |
| CN113267981A (zh) * | 2015-02-27 | 2021-08-17 | 佳能株式会社 | 盒 |
| CN107132744A (zh) * | 2016-02-26 | 2017-09-05 | 中山诚威科技有限公司 | 一种处理盒 |
| CN105807595A (zh) * | 2016-04-13 | 2016-07-27 | 珠海市润鑫打印耗材有限公司 | 处理盒的旋转定位组件及处理盒 |
| US10983477B2 (en) | 2016-04-13 | 2021-04-20 | Ninestar Corporation | Process cartridge |
| CN105807595B (zh) * | 2016-04-13 | 2019-10-15 | 纳思达股份有限公司 | 处理盒的旋转定位组件及处理盒 |
| CN108107696B (zh) * | 2016-09-28 | 2022-08-05 | 纳思达股份有限公司 | 一种驱动组件及其处理盒和电子成像装置 |
| CN108107696A (zh) * | 2016-09-28 | 2018-06-01 | 纳思达股份有限公司 | 一种驱动组件及其处理盒和电子成像装置 |
| JP2022003414A (ja) * | 2017-06-30 | 2022-01-11 | 納思達股▲ふん▼有限公司 | 動力受けユニット、回転部材、プロセスカートリッジ、装着方法及び取外方法 |
| JP7260610B2 (ja) | 2017-06-30 | 2023-04-18 | 納思達股▲ふん▼有限公司 | 動力受けユニット、回転部材、プロセスカートリッジ、装着方法及び取外方法 |
| JP2020518865A (ja) * | 2017-06-30 | 2020-06-25 | 納思達股▲ふん▼有限公司 | 動力受けユニット、回転部材、プロセスカートリッジ、装着方法及び取外方法 |
| CN116203811A (zh) * | 2017-12-13 | 2023-06-02 | 佳能株式会社 | 盒与图像形成装置 |
| US12072664B2 (en) | 2017-12-13 | 2024-08-27 | Canon Kabushiki Kaisha | Cartridge and image forming apparatus |
| US10768573B2 (en) | 2018-03-14 | 2020-09-08 | Print-Rite, Unicorn Image Products Co., Ltd. Of Zhuhai | Process cartridge and electrophotographic image forming apparatus |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101583910B (zh) | 旋转力传递部件 | |
| CN101568887B (zh) | 处理盒、电子照相成像设备和电子照相感光鼓单元 | |
| CN102419529B (zh) | 电子照相成像设备、显影装置及耦联构件 | |
| CN100458584C (zh) | 电摄影感光鼓、处理盒和电摄影成像设备 | |
| CN102323730B (zh) | 能够可拆卸地安装至电子照相成像设备的主组件的盒 | |
| CN105531632A (zh) | 用于电子照相式成像装置的盒和鼓单元 | |
| CN103217886A (zh) | 处理盒和电子照相感光鼓单元 | |
| CN104155865A (zh) | 盒以及使用该盒的电子照相成像设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| REG | Reference to a national code |
Ref country code: HK Ref legal event code: DE Ref document number: 1132339 Country of ref document: HK |
|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| REG | Reference to a national code |
Ref country code: HK Ref legal event code: GR Ref document number: 1132339 Country of ref document: HK |