JP5606899B2 - ブラシレスモータの駆動制御装置 - Google Patents
ブラシレスモータの駆動制御装置 Download PDFInfo
- Publication number
- JP5606899B2 JP5606899B2 JP2010287917A JP2010287917A JP5606899B2 JP 5606899 B2 JP5606899 B2 JP 5606899B2 JP 2010287917 A JP2010287917 A JP 2010287917A JP 2010287917 A JP2010287917 A JP 2010287917A JP 5606899 B2 JP5606899 B2 JP 5606899B2
- Authority
- JP
- Japan
- Prior art keywords
- arm side
- pwm signal
- phase
- overlap period
- period
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Landscapes
- Control Of Motors That Do Not Use Commutators (AREA)
Description
前記複数相の電機子コイルに通電を行うインバータ回路と、
前記インバータ回路を駆動するための駆動信号を生成するモータ駆動回路と、
前記オーバーラップ通電を行うオーバーラップ期間を設定するとともに、前記オーバーラップ期間に基づいて前記モータ駆動回路を制御するモータ制御部と、を備え、
前記インバータ回路は、
前記複数相の電機子コイルの各相ごとに設けられる複数の上アーム側スイッチング素子と、
前記複数相の電機子コイルの各相ごとに設けられ、対応する上アーム側スイッチング素子に直列接続される、複数の下アーム側スイッチング素子と、を有し、
前記モータ駆動回路は、定常駆動時には、前記複数相の電機子コイルの各相ごとに、前記複数の上アーム側スイッチング素子と前記複数の下アーム側スイッチング素子とのいずれか一方を、第1のPWM信号によりオン/オフ制御し、かつ、他方を、定電圧信号によりオン/オフ制御し、
前記モータ制御部は、前記オーバーラップ期間内には、前記オーバーラップ期間の直前に前記第1のPWM信号を供給していた前記上アーム側または下アーム側スイッチング素子に対して、前記第1のPWM信号よりも周波数が高い第2のPWM信号を供給するとともに、前記オーバーラップ期間の直前に前記定電圧信号を供給していた前記下アーム側または上アーム側スイッチング素子に対して、前記第1のPWM信号よりも周波数が高い第3のPWM信号を供給するように、前記モータ駆動回路を制御することを特徴とする駆動制御装置が提供される。
図1は本発明の第1の実施形態に係るブラシレスモータ2の駆動制御装置の概略構成を示すブロック図である。図1の駆動制御装置1は、例えば3相のブラシレスモータ2(以下、単にモータ2と呼ぶ)の駆動制御に用いられるものであり、モータ2が有する複数相の電機子コイル3に対してオーバーラップ通電を行って、モータ2のロータ4を回転させる。駆動制御対象であるモータ2は、種々のタイプのものが適用可能であり、2相以上であれば相数も特に問わない。以下では、説明の簡略化のために、3相のモータ2を駆動する例を説明する。以下では、3相を、U相、V相、W相と呼ぶ。
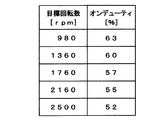
第2の実施形態は、回転数に応じて、オーバーラップ期間と第2および第3のPWM信号SG3,SG4のオンデューティを調整できるようにしたものである。
上述した実施形態では、上アーム側のスイッチング素子Q1,Q3,Q5と下アーム側のスイッチング素子Q2,Q4,Q6のスイッチング速度が略同一であることを念頭に置いて、上アーム側と下アーム側を区別せずに、第2のPWM信号SG3のオンデューティを設定した。ところが、上アーム側と下アーム側とでスイッチング速度が異なる場合も考えられる。この場合、上アーム側と下アーム側で、第2のPWM信号SG3のオンデューティを変えるのが望ましい。より具体的には、上アーム側と下アーム側で、スイッチング速度が遅い方のスイッチング素子の第2のPWM信号SG3のオンデューティをより大きくするのが望ましい。これを実現するには、上アーム側と下アーム側で、図6のようなテーブルを別個に設ければよい。
2 ブラシレスモータ
3 電機子コイル
4 ロータ
5 インバータ回路
6 モータ駆動回路
7 モータ制御部
8 回転位置検出部
11 オーバーラップ制御部
12 通電切替タイミング制御部
13 速度制御部
21 基準回転数算出部
22 目標回転数算出部
Claims (5)
- ステータに設けられた複数相の電機子コイルに対してオーバーラップ通電を行うことにより、複数の磁極を有するロータを回転させるブラシレスモータの駆動制御装置において、
前記複数相の電機子コイルに通電を行うインバータ回路と、
前記インバータ回路を駆動するための駆動信号を生成するモータ駆動回路と、
前記オーバーラップ通電を行うオーバーラップ期間を設定するとともに、前記オーバーラップ期間に基づいて前記モータ駆動回路を制御するモータ制御部と、を備え、
前記インバータ回路は、
前記複数相の電機子コイルの各相ごとに設けられる複数の上アーム側スイッチング素子と、
前記複数相の電機子コイルの各相ごとに設けられ、対応する上アーム側スイッチング素子に直列接続される、複数の下アーム側スイッチング素子と、を有し、
前記モータ駆動回路は、定常駆動時には、前記複数相の電機子コイルの各相ごとに、前記複数の上アーム側スイッチング素子と前記複数の下アーム側スイッチング素子とのいずれか一方を、第1のPWM信号によりオン/オフ制御し、かつ、他方を、定電圧信号によりオン/オフ制御し、
前記モータ制御部は、前記オーバーラップ期間内には、前記オーバーラップ期間の直前に前記第1のPWM信号を供給していた前記上アーム側または下アーム側スイッチング素子に対して、前記第1のPWM信号よりも周波数が高い第2のPWM信号を供給するとともに、前記オーバーラップ期間の直前に前記定電圧信号を供給していた前記下アーム側または上アーム側スイッチング素子に対して、前記第1のPWM信号よりも周波数が高い第3のPWM信号を供給するように、前記モータ駆動回路を制御することを特徴とする駆動制御装置。 - 前記第2のPWM信号は、前記オーバーラップ期間内において、少なくとも前記第1のPWM信号がハイレベルの期間内に生成されるPWM信号であり、
前記第3のPWM信号は、前記オーバーラップ期間内において、前記定電圧信号がハイレベルを取る期間内の少なくとも一部期間に連続して生成されるPWM信号であることを特徴とする請求項1に記載の駆動制御装置。 - 前記オーバーラップ期間は、各相ごとに、相の切り替え時に設定され、
前記モータ駆動回路は、前記オーバーラップ期間において、前記第1のPWM信号が供給される上アーム側または下アーム側では、次に切り替わる相のスイッチング素子に前記第1のPWM信号を供給するとともに、前記次に切り替わる相のスイッチング素子のオン期間内に、前記オーバーラップ期間の直前に前記第1のPWM信号を供給していた上アーム側または下アーム側スイッチング素子に前記第2のPWM信号を供給し、前記定電圧信号が供給される上アーム側または下アーム側では、前記オーバーラップ期間の直前に前記定電圧信号を供給していた上アーム側または下アーム側スイッチング素子に前記第3のPWM信号を供給することを特徴とする請求項2に記載の駆動制御装置。 - 前記ロータの回転位置を検出する回転位置検出部と、
前記回転位置検出部で検出された回転位置に基づいて、所定の基準時刻での前記ロータの回転数を表す基準回転数を算出する基準回転数算出部と、
所定の回転数指令に基づいて、前記ロータの回転数の目標値である目標回転数を算出する目標回転数算出部と、を備え、
前記モータ制御部は、前記目標回転数と前記基準回転数とに基づいて、前記オーバーラップ期間を設定するとともに、前記目標回転数または基準回転数に基づいて前記オーバーラップ期間内における前記第2および第3のPWM信号のオンデューティを可変制御することを特徴とする請求項3に記載の駆動制御装置。 - 前記モータ制御部は、前記上アーム側および下アーム側スイッチング素子のそれぞれごとに別個に、前記第2および第3のPWM信号のオンデューティを可変制御することを特徴とする請求項4に記載の駆動制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010287917A JP5606899B2 (ja) | 2010-12-24 | 2010-12-24 | ブラシレスモータの駆動制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010287917A JP5606899B2 (ja) | 2010-12-24 | 2010-12-24 | ブラシレスモータの駆動制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012138983A JP2012138983A (ja) | 2012-07-19 |
| JP5606899B2 true JP5606899B2 (ja) | 2014-10-15 |
Family
ID=46675967
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010287917A Active JP5606899B2 (ja) | 2010-12-24 | 2010-12-24 | ブラシレスモータの駆動制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5606899B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016201746A1 (de) * | 2016-02-05 | 2017-08-10 | Robert Bosch Gmbh | Verfahren, Winkelbestimmungsvorrichtung und Steuervorrichtung |
| JP6475182B2 (ja) * | 2016-03-28 | 2019-02-27 | ミネベアミツミ株式会社 | モータ駆動制御装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3419157B2 (ja) * | 1995-07-20 | 2003-06-23 | 株式会社日立製作所 | モータ駆動方法及びそれを用いた電気機器 |
| JP3837986B2 (ja) * | 1999-12-24 | 2006-10-25 | 三菱電機株式会社 | 永久磁石形モータ、永久磁石形モータの制御方法、永久磁石形モータの制御装置、圧縮機、冷凍・空調装置。 |
| JP2002119080A (ja) * | 2000-10-03 | 2002-04-19 | Matsushita Electric Ind Co Ltd | ブラシレスモータ |
| JP4226224B2 (ja) * | 2001-01-26 | 2009-02-18 | パナソニック株式会社 | インバータ装置 |
| JP4277762B2 (ja) * | 2004-08-05 | 2009-06-10 | パナソニック株式会社 | 冷蔵庫の制御装置 |
| JP2007252135A (ja) * | 2006-03-17 | 2007-09-27 | Aisin Seiki Co Ltd | ブラシレスモータの駆動装置 |
| JP4557955B2 (ja) * | 2006-11-08 | 2010-10-06 | 株式会社日立製作所 | モータ駆動回路及びモータ駆動方法並びに半導体集積回路装置 |
-
2010
- 2010-12-24 JP JP2010287917A patent/JP5606899B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012138983A (ja) | 2012-07-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6022319B2 (ja) | モータの駆動制御装置 | |
| JP5772029B2 (ja) | センサレスブラシレスモータの駆動装置 | |
| JP6475182B2 (ja) | モータ駆動制御装置 | |
| US20120181959A1 (en) | Driving apparatus of sensorless brushless motor | |
| JP2011211799A (ja) | モータ駆動装置 | |
| JP2014075931A (ja) | ステッピングモータの駆動制御装置 | |
| KR20120086255A (ko) | 모터 시스템 및 모터 제어 회로 | |
| US10944351B2 (en) | Motor drive control device and motor drive control method | |
| JP7199244B2 (ja) | モータ駆動制御装置及びモータの駆動制御方法 | |
| JP5606899B2 (ja) | ブラシレスモータの駆動制御装置 | |
| JP2015089198A (ja) | モータ駆動装置及びモータ装置 | |
| JP5784361B2 (ja) | ブラシレスモータの駆動制御装置 | |
| JP4556927B2 (ja) | モータ駆動装置 | |
| JP6674420B2 (ja) | モータ駆動制御装置 | |
| JP2009284682A (ja) | 電動モータの制御装置 | |
| JP2008043073A (ja) | ブラシレスモータの回転数制御方法、ブラシレスモータの回転数制御装置 | |
| JP2014158324A (ja) | モータの駆動制御装置及びモータの駆動制御装置の制御方法 | |
| JP2018183004A (ja) | インバータ制御装置 | |
| WO2019053943A1 (ja) | 同期電動機の制御装置及び制御方法 | |
| JP5666544B2 (ja) | モータ駆動装置 | |
| JP6485342B2 (ja) | モータ制御装置 | |
| JP2005192286A (ja) | 直流モータの駆動制御装置 | |
| JP2007295750A (ja) | ブラシレスモータ用制御装置 | |
| JP2012209999A (ja) | ブラシレスモータの駆動制御装置 | |
| JP2012075230A (ja) | ブラシレスモータの駆動制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131007 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140724 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140729 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140827 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5606899 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |