JP2009006873A - 車両用駆動制御装置 - Google Patents
車両用駆動制御装置 Download PDFInfo
- Publication number
- JP2009006873A JP2009006873A JP2007170617A JP2007170617A JP2009006873A JP 2009006873 A JP2009006873 A JP 2009006873A JP 2007170617 A JP2007170617 A JP 2007170617A JP 2007170617 A JP2007170617 A JP 2007170617A JP 2009006873 A JP2009006873 A JP 2009006873A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- drive
- torque
- drive torque
- turning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/30—Wheel torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0666—Engine torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/083—Torque
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Arrangement And Driving Of Transmission Devices (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
【課題】車両の旋回性を高めつつ、旋回走行時の車速をより適切に減少させることができるとともに、旋回走行時の駆動エネルギー効率を高める。
【解決手段】全ての車輪11L,11R,12L,12Rを駆動するための駆動トルクを総駆動トルクとする。総駆動トルクのうち所定の左右の車輪を駆動するための駆動トルクを左右輪駆動トルクとする。車両用駆動制御装置40は、車両10の旋回時に、左右輪駆動トルクを左右の車輪へ配分差を有して配分するように、制御部45で配分制御をすることにより、車両の旋回を補助するように構成されている。制御部は、車両の旋回時に、配分差を維持させつつ総駆動トルクを減少させるように制御する。
【選択図】図1
【解決手段】全ての車輪11L,11R,12L,12Rを駆動するための駆動トルクを総駆動トルクとする。総駆動トルクのうち所定の左右の車輪を駆動するための駆動トルクを左右輪駆動トルクとする。車両用駆動制御装置40は、車両10の旋回時に、左右輪駆動トルクを左右の車輪へ配分差を有して配分するように、制御部45で配分制御をすることにより、車両の旋回を補助するように構成されている。制御部は、車両の旋回時に、配分差を維持させつつ総駆動トルクを減少させるように制御する。
【選択図】図1
Description
本発明は、車両の旋回性を高めるようにした車両用駆動制御装置に関する。
近年、車両の旋回状態に応じて駆動源の駆動トルクを調整することによって、車両の旋回性を高めるようにした車両用駆動制御装置の開発が進められている(例えば、特許文献1参照。)。
特開平9−86378号公報
特許文献1に示す従来の車両用駆動制御装置は、目標ヨーレイトと実際に生じているヨーレイトとの差(ヨーレイト偏差)を算出し、このヨーレイト偏差が所定の「しきい値」を超えたときに、ヨーレイト偏差に応じた移動トルクを算出し、この移動トルク分だけ左右の後輪の間でトルクを移動させるというものである。この結果、車両にヨーモーメントが発生するので、車両の旋回性が高まる。
このように旋回走行時にトルクを左右移動させる方式(いわゆる、旋回アシストを付加する方式)については、左右の後輪間で移動させる方式の他に、左右の前輪間で移動させる方式、または、左右の前後輪の間で移動させる方式であってもよい。
このように旋回走行時にトルクを左右移動させる方式(いわゆる、旋回アシストを付加する方式)については、左右の後輪間で移動させる方式の他に、左右の前輪間で移動させる方式、または、左右の前後輪の間で移動させる方式であってもよい。
ここで、一般的な4輪駆動車両(駆動源によって左右の前輪と左右の後輪を駆動する形式の車両)に、上記従来の車両用駆動制御装置を採用した場合であって、次の各使用例における車両の旋回特性を考えてみる。
第1使用例は、左右の前輪だけを駆動して後輪を駆動しない、つまり、後輪による旋回アシストを付加しない使用例である。前輪を駆動する駆動トルクのことを、前輪用駆動トルク(前進駆動トルク)と言うことにする。
車両が旋回走行をしたときに、車両の進行方向に対して車輪の向きはスリップ角だけ、ずれる。このため、駆動源の駆動トルクがそのまま前輪から路面へ伝わることはない。この結果、直進走行時の車速に対して、旋回走行時の車速が減少する。
車両が旋回走行をしたときに、車両の進行方向に対して車輪の向きはスリップ角だけ、ずれる。このため、駆動源の駆動トルクがそのまま前輪から路面へ伝わることはない。この結果、直進走行時の車速に対して、旋回走行時の車速が減少する。
第2使用例は、左右の前輪を駆動しつつ、さらに、後輪による旋回アシストを付加した使用例である。全ての車輪を駆動するための駆動トルクを「総駆動トルク」と言うことにする。第2使用例の総駆動トルクは、第1使用例の前輪用駆動トルク(前進駆動トルク)と同一に設定すればよい。
第2使用例では、上記特許文献1のように左右の後輪の間でトルクを移動させるので、車両の旋回性が高まる。旋回性が高まったので、第1使用例に比べてステアリングホイールの操舵角が小さくてもよい(操舵の切れが良い)。操舵角が小さい分、車両の進行方向に対する車輪のスリップ角も小さくてすむ。このため、駆動源の駆動トルクが車輪から路面へ伝わり易い。この結果、直進走行時の車速に対して、旋回走行時の車速が余り減少しない。サスペンションの設定によっては増速してしまうことも、あり得る。
一般に、運転経験が豊富な運転者ほど、直進走行から旋回走行へ切り換えたときにおける、操舵角と車速の減少の程度の関係を経験則としてもっている。このため、旋回走行時の車速については、運転者が違和感を感じない程度に減少することが好ましい。また、旋回走行時における車速が第1使用例のように減少しないので、旋回時の駆動エネルギー効率を高めるには改良の余地がある。
本発明は、車両の旋回性を高めつつ、旋回走行時の車速をより適切に減少させることができるとともに、旋回走行時の駆動エネルギー効率を高めることができる技術を提供することを課題とする。
請求項1に係る発明は、全ての車輪を駆動するための駆動源の駆動トルクを総駆動トルクとし、この総駆動トルクのうち所定の左右の車輪を駆動するための駆動トルクを左右輪駆動トルクとし、車両の旋回時に、前記左右輪駆動トルクを前記左右の車輪へ配分差を有して配分するように、制御部で配分制御をすることにより、前記車両の旋回を補助するように構成された車両用駆動制御装置であって、前記制御部は、前記車両の旋回時に、前記配分差を維持させつつ前記総駆動トルクを減少させるように制御する構成であることを特徴とする。
請求項1に係る発明では、旋回走行時に、所定の左右の車輪へ配分する配分差を維持させつつ、総駆動トルクを減少させる。総駆動トルクが減少することによって、車速は減少する。このため、旋回走行時に、車両の旋回性を高めつつ、運転者が違和感を感じない程度に車速を減少させることができる。しかも、総駆動トルクを減少させることによって、旋回走行時の駆動エネルギー効率を高めることができる。
本発明を実施するための最良の形態を添付図に基づいて以下に説明する。なお、「前」、「後」、「左」、「右」、「上」、「下」は運転者から見た方向に従う。
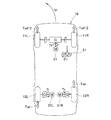
図1は本発明に係る車両用駆動制御装置を搭載した車両の模式的平面図兼制御系統図である。図2は図1に示すモータを備えた車両の模式的平面図である。
図1に示すように、車両10は、左右の前輪11L,11Rと左右の後輪12L,12Rを駆動する形式の、いわゆる、4輪駆動車両である。この車両10は、左右の前輪11L,11Rを駆動する前輪駆動系20と、左右の後輪12L,12Rを駆動する後輪駆動系30と、前・後輪駆動系20,30を駆動制御する車両用駆動制御装置40を備えている。
図1は本発明に係る車両用駆動制御装置を搭載した車両の模式的平面図兼制御系統図である。図2は図1に示すモータを備えた車両の模式的平面図である。
図1に示すように、車両10は、左右の前輪11L,11Rと左右の後輪12L,12Rを駆動する形式の、いわゆる、4輪駆動車両である。この車両10は、左右の前輪11L,11Rを駆動する前輪駆動系20と、左右の後輪12L,12Rを駆動する後輪駆動系30と、前・後輪駆動系20,30を駆動制御する車両用駆動制御装置40を備えている。
前輪駆動系20は、前輪駆動用モータ21と、前輪駆動用モータ21が発生した駆動トルクTf(前側駆動トルクTf)を車軸22を介して左右の前輪11L,11Rに伝達する前側のギヤ機構23とから成る。前側のギヤ機構23はディファレンシャルギヤ23から成る。
後輪駆動系30は、左の後輪用モータ31Lと、右の後輪用モータ31Rと、左の後輪用モータ31Lが発生した駆動トルクTl(左後駆動トルクTl)を左の後輪12Lに伝達する左後側のギヤ機構32Lと、右の後輪用モータ31Rが発生した駆動トルクTr(右後駆動トルクTr)を右の後輪12Rに伝達する右後側のギヤ機構32Rとからなる。
なお、各モータ21,31L,31Rは、ギヤ機構23,32L,32Rを介さずに、各車輪11L,11R,12L,12Rへ直接に駆動トルクを伝達してもよい。
なお、各モータ21,31L,31Rは、ギヤ機構23,32L,32Rを介さずに、各車輪11L,11R,12L,12Rへ直接に駆動トルクを伝達してもよい。
各モータ21,31L,31Rは、電動モータから成る駆動源である。以下、前輪駆動用モータ21のことを「前モータ21」と言い、左の後輪用モータ31Lのことを「左後モータ31L」と言い、右の後輪用モータ31Rのことを「右後モータ31R」と言う。
ここで、各駆動トルクTf,Tl,Trの関係について、図2を参照しながら次のように定義する。なお、次の符号Tt,Ta,ΔTについては図示していない。
前側駆動トルクTfと左後駆動トルクTlと右後駆動トルクTrの総和Ttのことを「総駆動トルクTt」と言う(Tt=Tf+Tl+Tr)。また、左後駆動トルクTlと右後駆動トルクTrの総和Taのことを「左右輪駆動トルクTa」と言う(Ta=Tl+Tr)。左後駆動トルクTlと右後駆動トルクTrとの差の、絶対値ΔTのことを「左右輪駆動トルクTaの配分差ΔT」と言う(ΔT=|Tl−Tr|)。
前側駆動トルクTfと左後駆動トルクTlと右後駆動トルクTrの総和Ttのことを「総駆動トルクTt」と言う(Tt=Tf+Tl+Tr)。また、左後駆動トルクTlと右後駆動トルクTrの総和Taのことを「左右輪駆動トルクTa」と言う(Ta=Tl+Tr)。左後駆動トルクTlと右後駆動トルクTrとの差の、絶対値ΔTのことを「左右輪駆動トルクTaの配分差ΔT」と言う(ΔT=|Tl−Tr|)。
総駆動トルクTtは、全ての車輪11L,11R,12L,12Rを駆動するための駆動トルクである。総駆動トルクTtのうち、前側駆動トルクTfは、車両10を前進走行させるための駆動トルクとなる。総駆動トルクTtのうち、左右輪駆動トルクTaは、車両10を旋回走行させるときに旋回を補助するための駆動トルクとなる。
車両10を直進走行時や旋回走行時に、左右の前輪11L,11Rを駆動する前進駆動トルクはTwfである。前進駆動トルクTwfは、左右の前輪11L,11Rへ均等に配分されるものであり、前輪駆動用モータ21が発生した前側駆動トルクTfに基づく。
車両10を旋回走行時に、左の後輪12Lを駆動する旋回駆動トルクはTwlである。左の旋回駆動トルクTwlは、左の後輪用モータ31Lが発生した左後駆動トルクTlに基づく。
車両10を旋回走行時に、右の後輪12Rを駆動する旋回駆動トルクはTwrである。右の旋回駆動トルクTwrは、右の後輪用モータ31Rが発生した右後駆動トルクTrに基づく。
車両10を旋回走行時に、左の後輪12Lを駆動する旋回駆動トルクはTwlである。左の旋回駆動トルクTwlは、左の後輪用モータ31Lが発生した左後駆動トルクTlに基づく。
車両10を旋回走行時に、右の後輪12Rを駆動する旋回駆動トルクはTwrである。右の旋回駆動トルクTwrは、右の後輪用モータ31Rが発生した右後駆動トルクTrに基づく。
図1に示すように、車両用駆動制御装置40は、車両10の旋回時に、左右輪駆動トルクTaを左右の車輪12L,12Rへ配分差ΔTを有して配分するように、制御部45で配分制御をすることにより、車両10の旋回を補助するように制御するものである。車両用駆動制御装置40のことを、以下、単に「制御装置40」と言う。制御装置40は、例えば、車速検出部41と操舵角検出部42と複数のトルク検出部43,44L,44Rと制御部45とドライバ回路46,47L,47Rとからなる。
車速検出部41は、車両10の走行速度Vr(車速Vr)を検出するものである。なお、車速検出部41は、各車輪11L,11R,12L,12Rの回転速度の平均値に基づいて、車速Vrを求めるものであってもよい。例えば、車両10に複数の車輪速度計測部を備え、これらの車輪速度計測部によって各車輪11L,11R,12L,12Rの回転速度を個別に計測し、これらの回転速度の平均値に基づいて車速Vrを求めることができる。
操舵角検出部42は、ステアリングホイール51の操舵角θr(操舵方向を含む)を検出するものである。ステアリングホイール51を操舵することによって、左右の前輪11L,11Rを操舵することができる。
操舵角検出部42は、ステアリングホイール51の操舵角θr(操舵方向を含む)を検出するものである。ステアリングホイール51を操舵することによって、左右の前輪11L,11Rを操舵することができる。
複数のトルク検出部43,44L,44Rは、各モータ21,31L,31Rの駆動トルクを個別に検出するものであり、例えば、モータ軸に作用する駆動トルクを非接触測定する磁歪式センサから成る。具体的には、前トルク検出部43は前モータ21の駆動トルクTfを検出する。左後トルク検出部44Lは左後モータ31Lの駆動トルクTlを検出する。右後トルク検出部44Rは右後モータ31Rの駆動トルクTrを検出する。
なお、複数のトルク検出部43,44L,44Rは、各モータ21,31L,31Rに供給されている各々の駆動電流の値に基づいて、各駆動トルクを個別に推測するものであってもよい。このように、各駆動トルクを間接的に求める複数のトルク検出部43,44L,44Rを採用すれば、各駆動トルクを直接的に検出する検出部を設ける必要がなくなる。
なお、複数のトルク検出部43,44L,44Rは、各モータ21,31L,31Rに供給されている各々の駆動電流の値に基づいて、各駆動トルクを個別に推測するものであってもよい。このように、各駆動トルクを間接的に求める複数のトルク検出部43,44L,44Rを採用すれば、各駆動トルクを直接的に検出する検出部を設ける必要がなくなる。
制御部45は、車速検出部41と操舵角検出部42と各トルク検出部43,44L,44Rとヨーレイト検出部(図示せぬ)等から各検出信号Vr,θr,Tf,Tl,Tr,・・・を受けて、制御信号を各ドライバ回路46,47L,47Rに発することにより、各モータ21,31L,31Rを個別に駆動制御する。各ドライバ回路46,47L,47Rは、制御部45の制御信号に応じてバッテリ52から各モータ21,31L,31Rへ駆動電流を供給する。
さらに、制御部45は、車両10の旋回時に、駆動トルクTl,Trの配分差ΔTを維持させつつ総駆動トルクTtを減少させるように制御する構成である。
さらに、制御部45は、車両10の旋回時に、駆動トルクTl,Trの配分差ΔTを維持させつつ総駆動トルクTtを減少させるように制御する構成である。
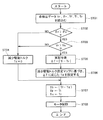
次に、制御部45をマイクロコンピュータとした場合の制御フローについて、図1及び図2を参照しつつ、図3に基づき説明する。図3は図1に示された制御部45によって実行されるモータ駆動制御ルーチンの一例を示す制御フローチャートである。なお、図3に示すモータ駆動制御ルーチンは、所定の周期毎に繰り返して実行される。
先ず、車速検出部41から車速Vrを読み込み、操舵角検出部42から操舵角θrを読み込み、各トルク検出部43,44L,44Rから駆動トルクTf,Tl,Trを読み込む(ステップST01)。
次に、検出された実際の操舵角θrが所定の最低基準操舵角θsを越えたか否かを判断するとともに(ステップST02)、検出された実際の車速Vrが所定の最低基準車速Vsを越えたか否かを判断し(ステップST03)、どちらの値θr,Vrも基準値θs,Vs以下である場合には、減少駆動トルクTdを0に設定する(ステップST04)。
次に、検出された実際の操舵角θrが所定の最低基準操舵角θsを越えたか否かを判断するとともに(ステップST02)、検出された実際の車速Vrが所定の最低基準車速Vsを越えたか否かを判断し(ステップST03)、どちらの値θr,Vrも基準値θs,Vs以下である場合には、減少駆動トルクTdを0に設定する(ステップST04)。
なお、最低基準操舵角θsは、車両10を旋回させたときに、運転者が違和感を感じない程度の操舵角に設定される。また、最低基準車速Vsは、車両10を旋回させたときに、運転者が違和感を感じない程度の車速に設定される。操舵角θrや車速Vrが小さい場合には、運転者が違和感を感じないとともに、旋回走行時の駆動エネルギー効率を高める効果が小さいからである。
「θr>θs」で且つ「Vr>Vs」の場合には、左後駆動トルクTlと右後駆動トルクTrとの差の、絶対値ΔTを演算によって求め(ΔT=|Tl−Tr|)、この絶対値ΔTを「左右輪駆動トルクTaの配分差ΔT(実配分差ΔT)」とする。(ステップST05)。
次に、減少駆動トルク設定マップに基づき、実配分差ΔTに応じた減少駆動トルクTdを設定する(ステップST06)。ここで求められる減少駆動トルクTdは0を越える値である。なお、減少駆動トルク設定マップについては後述する(図4参照)。
次に、減少駆動トルク設定マップに基づき、実配分差ΔTに応じた減少駆動トルクTdを設定する(ステップST06)。ここで求められる減少駆動トルクTdは0を越える値である。なお、減少駆動トルク設定マップについては後述する(図4参照)。
次に、上記ステップST04又はステップST06で設定された減少駆動トルクTdを加味して、旋回走行時に制御の目標となる各駆動トルク、つまり、目標駆動トルクTfr,Tlr,Trrを設定する(ステップST07)。
具体的には、旋回走行時の目標となる前側目標駆動トルクTfrを、検出された実際の前側駆動トルクTfから減少駆動トルクTdを減算した値に設定する(Tfr=Tf−Td)。旋回走行時の目標となる左後目標駆動トルクTlrを、検出された実際の左後駆動トルクTlと同一の値に設定する(Tlr=Tl)。旋回走行時の目標となる右後目標駆動トルクTrrを、検出された実際の右後駆動トルクTrと同一の値に設定する(Trr=Tr)。
上述のように「Tlr=Tl」で且つ「Trr=Tr」なので、ΔT=|Tl−Tr|=|Tlr−Trr|の関係にある。つまり、目標となるΔTの値は、実配分差ΔTと同一である。
上述のように「Tlr=Tl」で且つ「Trr=Tr」なので、ΔT=|Tl−Tr|=|Tlr−Trr|の関係にある。つまり、目標となるΔTの値は、実配分差ΔTと同一である。
最後に、設定された目標駆動トルクTfr,Tlr,Trrに基づいて、各モータ21,31L,31Rを個別に駆動制御し(ステップST08)、図3に示すモータ駆動制御ルーチンによる制御を終了する。
次に、上記ステップST06で用いる減少駆動トルク設定マップについて、図4に基づき説明する。図4は本発明に係る減少駆動トルク設定マップの説明図であり、横軸を左右輪駆動トルクの実配分差ΔT(Nm)とし、縦軸を減少駆動トルクTd(Nm)として、実配分差ΔTに対応する減少駆動トルクTdを得る減少駆動トルク設定マップを示す。
図右肩上がりの直線は減少駆動トルク設定特性線Qtであって、実配分差ΔTが増大するにつれて、減少駆動トルクTdも増大する特性を有している。この減少駆動トルク設定特性線Qtは、減少駆動トルク設定マップとして用いられる。
図右肩上がりの直線は減少駆動トルク設定特性線Qtであって、実配分差ΔTが増大するにつれて、減少駆動トルクTdも増大する特性を有している。この減少駆動トルク設定特性線Qtは、減少駆動トルク設定マップとして用いられる。
次に、車両10を旋回走行させる使用例について、図2に基づき説明する。この使用例は、左右の前輪11L,11Rを駆動しつつ、さらに、左右の後輪12L,12Rによる旋回アシストを付加した使用例である。
図2に示すように、車両10を左へ旋回させる場合には、旋回を補助するための左右の後輪12L,12Rのうち、左の後輪12Lは旋回内輪となり、右の後輪12Rは旋回外輪となる。左の後輪12Lは逆方向への旋回駆動トルクTwlによって駆動され、右の後輪12Rは前進方向への旋回駆動トルクTwrによって駆動される。この結果、車両10にヨーモーメントが発生するので、車両10の旋回性が高まる。
図2に示すように、車両10を左へ旋回させる場合には、旋回を補助するための左右の後輪12L,12Rのうち、左の後輪12Lは旋回内輪となり、右の後輪12Rは旋回外輪となる。左の後輪12Lは逆方向への旋回駆動トルクTwlによって駆動され、右の後輪12Rは前進方向への旋回駆動トルクTwrによって駆動される。この結果、車両10にヨーモーメントが発生するので、車両10の旋回性が高まる。
使用例では、車両10の旋回性が高まったので、ステアリングホイール51の操舵角θrが小さくてもよい(操舵の切れが良い)。操舵角θrが小さい分、車両10の進行方向に対する前輪11L,11Rのスリップ角も小さくてすむ。このため、前モータ21の前側駆動トルクTf(つまり、前進駆動トルクTwf)が前輪11L,11Rから路面へ伝わり易い。この結果、直進走行時の車速に対して、旋回走行時の車速Vrが余り減少しない。サスペンションの設定によっては増速してしまうことも、あり得る。
これに対して、本発明の車両用駆動制御装置40によれば、車両10の旋回走行時に所定の左右の車輪、つまり、後輪12L,12Rへ配分する配分差ΔTを維持させつつ、総駆動トルクTtを減少させることができる(図3に示す、ステップST05〜ST07参照)。
総駆動トルクTtを減少させるにあたっては、特に、前進駆動トルクTf(前側駆動トルクTf)からだけ、減少駆動トルクTd分だけ減少させることにした(ステップST07参照)。このようにした理由は、次の通りである。例えば、図2に示すように、旋回内側となる左後モータ31Lが、車両進行方向に対して逆方向の左後駆動トルクTlを発生しているときのことを考える。この逆方向の左後駆動トルクTlから更に減少駆動トルクTd分だけ減少させると、左後モータ31Lは出力限界に達してしまう場合があり得る。このような事態を回避するために、前進駆動トルクTfからだけ、減少駆動トルクTdを減少させることにした。
以上の説明から明らかなように、総駆動トルクTtを減少させることによって、車速Vrは減少する。このため、旋回走行時に、車両10の旋回性を高めつつ、運転者が違和感を感じない程度に車速Vrを減少させることができる。しかも、総駆動トルクTtを減少させることによって、旋回走行時の駆動エネルギー効率を高めることができる。
なお、本発明の実施の形態において、車両用駆動制御装置40は、車両10に装着された車輪の個数にかかわらず適用できるものであり、左右駆動輪差を制御可能な車両に適用できる。
さらに、車両用駆動制御装置40は、左右輪駆動トルクTaを、左右の前輪11L,11Rと左右の後輪12L,12Rの両方に適宜伝達することによって、4つの車輪11L,11R,12L,12Rを組み合わせて、旋回補助することができる。例えば、車両10の走行中に、前輪側と後輪側とに対する総駆動トルクTtの配分比を自由に変化させるようにした車両にも適用できる。
旋回走行時の総駆動トルクTtについては、車速Vrの値が、「従来の車両が旋回走行をする場合の車速」に低下するまで、減少させることが特に好ましい。ここで、「従来の車両」とは、旋回補助が無い車両、つまり、旋回時に左右の駆動輪に駆動トルクの配分差を設けない一般的な車両のことである。このように総駆動トルクTtを減少させることにより、運転者にとって、より違和感の少ない旋回補助となる。
さらに、車両用駆動制御装置40は、旋回走行時において、運転者が違和感を感じない車速Vrの範囲内であれば、総駆動トルクTtをいくらでも減少させることが可能な形式の車両(車速を、旋回補助無しの場合の車速までしか減少しないという制限がない形式の車両)にも適用できる。
また、車両10の操舵方式は、ステアリングホイール51を操舵することによって、左右の後輪12L,12Rを操舵する方式であってもよい。この方式を採用した場合には、左右輪駆動トルクTaによって左右の前輪11L,11Rを駆動するとともに、前進駆動トルクTf(前側駆動トルクTf)によって左右の後輪12L,12Rを駆動すればよい。
また、複数の車輪11L,11R,12L,12Rに対する複数の駆動源21,31L,31Rの組合せは任意である。例えば、左右の前輪11L,11Rをそれぞれ個別の駆動源によって駆動するとともに、左右の後輪12L,12Rを1つの動力源によって駆動する構成にすることができる。また、4つの駆動源を設け、4つの車輪11L,11R,12L,12Rを、それぞれ個別の駆動源によって駆動する構成にすることができる。
また、車両10は、前進駆動トルクTf(前側駆動トルクTf)によって左右の後輪12L,12Rを駆動するとともに、左右輪駆動トルクTaによって左右の前輪11L,11Rを駆動する構成であってもよい。この場合には、総駆動トルクTtを減少させるときに、左後・右後モータ31L,31Rから減少駆動トルクTd分だけ減少させることが好ましい。
また、各モータ(駆動源)21,31L,31Rのうち、左右輪駆動トルクTaを発生するモータが「車両10を前進走行させるための駆動トルク」を発生するようにしてもよい。
また、車両10の旋回走行時において、複数のモータ21,31L,31Rから総駆動トルクTtを減少させるときに、各モータ21,31L,31Rの単体としての出力限界に達しない範囲であれば、いずれかのモータを適宜選択して減少駆動トルクTd分を減少させる構成であってもよい。
また、車両10の旋回走行時において、複数のモータ21,31L,31Rから総駆動トルクTtを減少させるときに、各モータ21,31L,31Rの出力バランスに応じて、それぞれ減少させる構成であってもよい。
また、駆動源21,31L,31Rは電動モータに限定されるものではなく、例えばエンジンであってもよい。
また、駆動源21,31L,31Rを電動モータとした場合に、電動モータをインホイールモータによって構成することができる。また、電動モータをサスペンションのばね上側に配置し、駆動トルクをドライブシャフトを介して各車輪11L,11R,12L,12Rに伝達する構成にすることができる。
また、駆動源21,31L,31Rを電動モータとした場合に、電動モータに対するエネルギー源はバッテリ52に限定されるものではなく、例えば燃料電池や発電機であってもよい。
また、駆動源21,31L,31Rを電動モータとした場合に、電動モータをインホイールモータによって構成することができる。また、電動モータをサスペンションのばね上側に配置し、駆動トルクをドライブシャフトを介して各車輪11L,11R,12L,12Rに伝達する構成にすることができる。
また、駆動源21,31L,31Rを電動モータとした場合に、電動モータに対するエネルギー源はバッテリ52に限定されるものではなく、例えば燃料電池や発電機であってもよい。
また、制御部45はマイクロコンピュータによる構成に限定されない。
また、上記図3に示すステップST06で設定する減少駆動トルクTdは、図4に示す減少駆動トルク設定マップを用いて設定するものに限定されるものではなく、例えば演算式によって設定してもよい。
また、上記図3に示すステップST06で設定する減少駆動トルクTdは、図4に示す減少駆動トルク設定マップを用いて設定するものに限定されるものではなく、例えば演算式によって設定してもよい。
また、制御部45は、車両10の旋回時に、駆動トルクTl,Trの配分差ΔTを維持させつつ総駆動トルクTtを減少させるように制御する構成であればよい。
このため、図3に示す制御フローチャートにおいては、操舵角θrと車速Vrの各値に応じて(ステップST02,ST03)、実配分差ΔTを求めるものであるが(ステップST05)、これに限定されるものではない。
例えば、操舵角θrと車速Vrの各値にかかわらず、実配分差ΔTを求める(ステップST05)ようにしてもよい。その場合に、ステップST02〜ST04は不要となる。
また、操舵角θやと車速Vrの代わりに、横加速度の値またはヨーレイトの値に応じて、実配分差ΔTを求める(ステップST05)ようにしてもよい。
このため、図3に示す制御フローチャートにおいては、操舵角θrと車速Vrの各値に応じて(ステップST02,ST03)、実配分差ΔTを求めるものであるが(ステップST05)、これに限定されるものではない。
例えば、操舵角θrと車速Vrの各値にかかわらず、実配分差ΔTを求める(ステップST05)ようにしてもよい。その場合に、ステップST02〜ST04は不要となる。
また、操舵角θやと車速Vrの代わりに、横加速度の値またはヨーレイトの値に応じて、実配分差ΔTを求める(ステップST05)ようにしてもよい。
また、上記図3に示すステップST12における制御方式としては、オープンループのフィードフォワード制御方式を採用すればよい。何故なら、ステップST06において、減少駆動トルク設定マップに基づき、配分差ΔTに応じた減少駆動トルクTd(目標値)を設定しているからである。オープンループの制御とは、モータに指令値を与えるだけで制御対象の出力をフィードバックしない制御系のことである。
なお、ステップST08における制御方式は、上記制御方式に限定されるものではなく、例えば、誤差(偏差)駆動型のフィードバック制御方式を採用してもよい。この制御方式を採用した場合には、目標となる所定の車速(目標車速)Voを予め算出し、この目標車速Voと実際の車速Vrとの誤差を求め(ΔV=Vo−Vr)、この誤差ΔVを制御の入力値とし、この入力値ΔVに基づいてモータ21,31L,31Rを個別に駆動制御することができる。
なお、ステップST08における制御方式は、上記制御方式に限定されるものではなく、例えば、誤差(偏差)駆動型のフィードバック制御方式を採用してもよい。この制御方式を採用した場合には、目標となる所定の車速(目標車速)Voを予め算出し、この目標車速Voと実際の車速Vrとの誤差を求め(ΔV=Vo−Vr)、この誤差ΔVを制御の入力値とし、この入力値ΔVに基づいてモータ21,31L,31Rを個別に駆動制御することができる。
本発明の車両用駆動制御装置40は、4輪駆動車両に備えるのに好適である。
10…車両、11L,11R,12L,12R…車輪、21.31L,31R…駆動源(電動モータ)、40…車両用駆動制御装置、41…車速検出部、42…操舵角検出部、43,44L,44R…トルク検出部、45…制御部、Ta…左右輪駆動トルク、Td…減少駆動トルク、Tf…実際の前側駆動トルク、Tfr…前側目標駆動トルク、Tl…実際の左後駆動トルク、Tlr…左後目標駆動トルク、Tr…実際の右後駆動トルク、Trr…右後目標駆動トルク、Tt…総駆動トルク、ΔT…配分差。
Claims (1)
- 全ての車輪を駆動するための駆動源の駆動トルクを総駆動トルクとし、この総駆動トルクのうち所定の左右の車輪を駆動するための駆動トルクを左右輪駆動トルクとし、
車両の旋回時に、前記左右輪駆動トルクを前記左右の車輪へ配分差を有して配分するように、制御部で配分制御をすることにより、前記車両の旋回を補助するように構成された車両用駆動制御装置であって、
前記制御部は、前記車両の旋回時に、前記配分差を維持させつつ前記総駆動トルクを減少させるように制御する構成であることを特徴とした車両用駆動制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007170617A JP2009006873A (ja) | 2007-06-28 | 2007-06-28 | 車両用駆動制御装置 |
| EP08011618A EP2008900B1 (en) | 2007-06-28 | 2008-06-26 | Drive control apparatus for vehicle |
| DE602008000473T DE602008000473D1 (de) | 2007-06-28 | 2008-06-26 | Antriebssteuervorrichtung für Fahrzeuge |
| US12/163,194 US8209099B2 (en) | 2007-06-28 | 2008-06-27 | Drive control apparatus for vehicle |
| CN2008101274272A CN101332815B (zh) | 2007-06-28 | 2008-06-30 | 车辆用驱动控制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007170617A JP2009006873A (ja) | 2007-06-28 | 2007-06-28 | 車両用駆動制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009006873A true JP2009006873A (ja) | 2009-01-15 |
Family
ID=39711920
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007170617A Pending JP2009006873A (ja) | 2007-06-28 | 2007-06-28 | 車両用駆動制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8209099B2 (ja) |
| EP (1) | EP2008900B1 (ja) |
| JP (1) | JP2009006873A (ja) |
| CN (1) | CN101332815B (ja) |
| DE (1) | DE602008000473D1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014075933A (ja) * | 2012-10-05 | 2014-04-24 | Ntn Corp | モータ搭載自動車の低温時駆動制御装置 |
| CN107084059A (zh) * | 2016-02-15 | 2017-08-22 | 马自达汽车株式会社 | 带涡轮增压器的发动机的控制装置 |
| JP2017145707A (ja) * | 2016-02-15 | 2017-08-24 | マツダ株式会社 | ターボ過給機付きエンジンの制御装置 |
| JP2019025938A (ja) * | 2017-07-25 | 2019-02-21 | 株式会社ジェイテクト | 車両の運動制御装置 |
| CN117261621A (zh) * | 2023-11-21 | 2023-12-22 | 上海复通软件技术有限公司 | 一种车辆驱动能量分配控制方法及装置 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102009000044A1 (de) * | 2009-01-07 | 2010-07-08 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines Fahrzeuges, insbesondere eines Hybridfahrzeuges |
| US9061663B2 (en) | 2010-10-27 | 2015-06-23 | Robert Bosch Gmbh | Trailer sway mitigation using torque vectoring |
| CA2840570C (en) | 2011-07-04 | 2016-11-08 | Honda Motor Co., Ltd. | Vehicle driving device |
| CN102910204B (zh) * | 2012-10-31 | 2015-10-07 | 浙江吉利汽车研究院有限公司杭州分公司 | 一种轮毂电机驱动混合动力汽车的电子差速控制器 |
| GB2512287B (en) * | 2013-03-22 | 2015-06-03 | Jaguar Land Rover Ltd | Improvements in vehicle steering |
| CN105848946B (zh) * | 2013-12-27 | 2017-12-26 | 本田技研工业株式会社 | 车辆以及车辆的控制方法 |
| FR3017095B1 (fr) * | 2014-02-03 | 2017-05-12 | Renault Sas | Procede de suivi de trajectoire d'un vehicule automobile et vehicule associe |
| US11590977B2 (en) * | 2019-12-31 | 2023-02-28 | Rivian Ip Holdings, Llc | Systems and methods for providing a vehicle with a torque vectored K-turn mode |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5453930A (en) * | 1991-02-08 | 1995-09-26 | Nissan Motor Co., Ltd. | Drive system for electric automobiles |
| JP3183124B2 (ja) | 1995-09-28 | 2001-07-03 | 三菱自動車工業株式会社 | 車両の旋回挙動制御装置 |
| JP4394304B2 (ja) * | 2001-04-24 | 2010-01-06 | 富士重工業株式会社 | 車両運動制御装置 |
| EP1466775A3 (en) * | 2003-04-10 | 2010-09-15 | Nissan Motor Company Limited | Drive controlling apparatus and method for automotive vehicle |
| JP4293431B2 (ja) * | 2003-06-11 | 2009-07-08 | 富士重工業株式会社 | 車両制御装置および車両制御方法 |
| JP4146784B2 (ja) * | 2003-11-18 | 2008-09-10 | 富士重工業株式会社 | ハイブリッド車両の駆動力制御装置 |
| JP4625632B2 (ja) * | 2003-12-25 | 2011-02-02 | 日立オートモティブシステムズ株式会社 | 車両駆動装置 |
| JP4661138B2 (ja) * | 2004-09-06 | 2011-03-30 | 日産自動車株式会社 | 電動車両 |
| JP4696224B2 (ja) * | 2005-07-19 | 2011-06-08 | 三菱自動車工業株式会社 | 4輪駆動車の差動制限制御装置 |
| US7386379B2 (en) * | 2005-07-22 | 2008-06-10 | Gm Global Technology Operations, Inc. | Method and apparatus to control coordinated wheel motors |
| US7966113B2 (en) * | 2005-08-25 | 2011-06-21 | Robert Bosch Gmbh | Vehicle stability control system |
| JP4792979B2 (ja) * | 2006-01-11 | 2011-10-12 | 株式会社アドヴィックス | 車両の運動制御装置 |
| JP4396660B2 (ja) * | 2006-05-12 | 2010-01-13 | 三菱自動車工業株式会社 | 車両の旋回挙動制御装置 |
| FR2901761B1 (fr) * | 2006-05-31 | 2009-02-13 | Renault Sas | Dispositif de controle de l'entrainement d'un vehicule automobile |
| JP4321569B2 (ja) * | 2006-09-05 | 2009-08-26 | 日産自動車株式会社 | 車両の制御装置及び制御方法 |
| JP4929944B2 (ja) * | 2006-09-20 | 2012-05-09 | 日産自動車株式会社 | 車両の駆動力配分制御装置 |
-
2007
- 2007-06-28 JP JP2007170617A patent/JP2009006873A/ja active Pending
-
2008
- 2008-06-26 DE DE602008000473T patent/DE602008000473D1/de active Active
- 2008-06-26 EP EP08011618A patent/EP2008900B1/en not_active Ceased
- 2008-06-27 US US12/163,194 patent/US8209099B2/en not_active Expired - Fee Related
- 2008-06-30 CN CN2008101274272A patent/CN101332815B/zh not_active Expired - Fee Related
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014075933A (ja) * | 2012-10-05 | 2014-04-24 | Ntn Corp | モータ搭載自動車の低温時駆動制御装置 |
| CN107084059A (zh) * | 2016-02-15 | 2017-08-22 | 马自达汽车株式会社 | 带涡轮增压器的发动机的控制装置 |
| JP2017145707A (ja) * | 2016-02-15 | 2017-08-24 | マツダ株式会社 | ターボ過給機付きエンジンの制御装置 |
| JP2017145708A (ja) * | 2016-02-15 | 2017-08-24 | マツダ株式会社 | ターボ過給機付きエンジンの制御装置 |
| US10125670B2 (en) | 2016-02-15 | 2018-11-13 | Mazda Motor Corporation | Turbocharged engine control device |
| US10138824B2 (en) | 2016-02-15 | 2018-11-27 | Mazda Motor Corporation | Turbocharged engine control device |
| CN107084059B (zh) * | 2016-02-15 | 2020-06-05 | 马自达汽车株式会社 | 带涡轮增压器的发动机的控制装置 |
| JP2019025938A (ja) * | 2017-07-25 | 2019-02-21 | 株式会社ジェイテクト | 車両の運動制御装置 |
| CN117261621A (zh) * | 2023-11-21 | 2023-12-22 | 上海复通软件技术有限公司 | 一种车辆驱动能量分配控制方法及装置 |
| CN117261621B (zh) * | 2023-11-21 | 2024-02-02 | 上海复通软件技术有限公司 | 一种车辆驱动能量分配控制方法及装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101332815B (zh) | 2012-02-01 |
| US20090005931A1 (en) | 2009-01-01 |
| EP2008900A1 (en) | 2008-12-31 |
| CN101332815A (zh) | 2008-12-31 |
| EP2008900B1 (en) | 2009-12-30 |
| DE602008000473D1 (de) | 2010-02-11 |
| US8209099B2 (en) | 2012-06-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009006873A (ja) | 車両用駆動制御装置 | |
| US9656687B2 (en) | Vehicle having independently driven and controlled right and left drive wheels | |
| US8788147B2 (en) | Method for determining a toothed rack force for a steering device in a vehicle | |
| US20130211678A1 (en) | Vehicle with independently driven multiple axes, and controller which independently drives multiple axles | |
| JP2004104991A (ja) | 回生制動を持つ車両の独立制動及び操縦性の制御方法及びシステム | |
| WO2019102998A1 (ja) | 車両 | |
| KR101557217B1 (ko) | 운전자의 힘에 따른 조향력 조절 방법 및 시스템 | |
| JP5007542B2 (ja) | 車両の旋回挙動制御装置 | |
| JP2008141875A (ja) | 走行装置及び駆動制御装置 | |
| JP5032529B2 (ja) | 車両用操舵装置 | |
| JP2006187047A (ja) | 4輪独立駆動車の駆動力制御装置 | |
| JP6833666B2 (ja) | 車両 | |
| JP4030871B2 (ja) | 電気自動車の操舵機構 | |
| JP5625801B2 (ja) | 車両挙動制御装置 | |
| JP3571289B2 (ja) | 電気自動車用操舵装置 | |
| JP4687234B2 (ja) | 車両用操舵制御装置及び車両用操舵制御方法 | |
| JP4687233B2 (ja) | 車両用操舵制御装置及び車両用操舵制御方法 | |
| JP4935022B2 (ja) | 車両の左右トルク配分制御装置 | |
| JP4604631B2 (ja) | 車両用操舵制御装置 | |
| JP2009126388A (ja) | 車両用運動制御装置 | |
| JP2006182050A (ja) | 4輪独立駆動車の制駆動力制御装置 | |
| WO2018030407A1 (ja) | 車両 | |
| JP4433785B2 (ja) | ステアリング装置 | |
| Wang et al. | Driver-vehicle closed-loop simulation of differential drive assist steering control system for motorized-wheel electric vehicle | |
| JP2005206114A (ja) | 車両用転舵制御装置 |