CN112577431B - 光栅尺测量装置及测量方法 - Google Patents
光栅尺测量装置及测量方法 Download PDFInfo
- Publication number
- CN112577431B CN112577431B CN201910935450.2A CN201910935450A CN112577431B CN 112577431 B CN112577431 B CN 112577431B CN 201910935450 A CN201910935450 A CN 201910935450A CN 112577431 B CN112577431 B CN 112577431B
- Authority
- CN
- China
- Prior art keywords
- grating
- light beam
- light
- reflecting
- incident
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 22
- 238000005259 measurement Methods 0.000 claims abstract description 50
- 230000003287 optical effect Effects 0.000 claims abstract description 24
- 238000006073 displacement reaction Methods 0.000 claims description 38
- 239000013307 optical fiber Substances 0.000 claims description 23
- 238000013519 translation Methods 0.000 claims description 16
- 238000001514 detection method Methods 0.000 claims description 15
- 238000012545 processing Methods 0.000 claims description 15
- 230000010287 polarization Effects 0.000 claims description 14
- 238000000691 measurement method Methods 0.000 claims description 8
- 230000001427 coherent effect Effects 0.000 claims description 5
- 230000002452 interceptive effect Effects 0.000 claims description 3
- 230000033001 locomotion Effects 0.000 abstract description 6
- 238000010586 diagram Methods 0.000 description 9
- 238000001259 photo etching Methods 0.000 description 3
- 241000282326 Felis catus Species 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/266—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light by interferometric means
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optical Transform (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
本发明提供一种光栅尺测量装置及测量方法,包括:光源、读头及光栅,读头包括第一反射单元和第二反射单元,第一反射单元和第二反射单元均包括至少两个第一反射元件和至少一个第二反射元件,光源发射的第一光束和第二光束由读头入射至所述光栅,经光栅衍射或反射及第一反射元件、第二反射元件反射后在光栅上的光斑位置至少有部分重叠,且经光栅衍射后沿同一方向出射。本发明可利用一维光栅实现二维位置测量,提高系统光学细分倍数,同时可补偿由于光栅和读头之间垂向运动带来的测量光斑偏离,保持测量光斑具有最佳有效信号,显著增大光栅尺测量装置的垂向测量范围。
Description
技术领域
本发明涉及一种测量装置,特别涉及一种光栅尺测量装置及测量方法。
背景技术
纳米测量技术是纳米加工、纳米操控、纳米材料等领域的基础。IC产业、精密机械、微机电系统等都需要高分辨率、高精度的位移传感器,以达到纳米精度定位。
随着集成电路朝大规模、高集成度的方向飞跃发展,光刻机的套刻精度要求也越来越高,与之相应地,获取工件台、掩模台的六自由度位置信息的精度也随之提高。
干涉仪有较高的测量精度,可达纳米量级,在光刻系统中,被运用于测量工件台、掩模台的位置。然而,目前干涉仪的测量精度几乎达到极限,同时干涉仪测量精度受周围环境影响较大,测量重复精度不高(即便环境很好,也会超过1nm),传统干涉仪测量装置很难满足进一步提高套刻精度的要求。所以高精度、高稳定性的皮米测量方案迫切需要。
相比之下,光栅尺测量装置的光程可以做到很小,通常为几毫米,其光程和测量范围无关,因此它的测量精度对环境影响不敏感,具有测量稳定性高,结构简单,易于小型化的特点,使其在纳米测量领域占据重要的一席之地。在新一代光刻系统中已开始逐渐取代干涉仪,承担高精度、高稳定性皮米精度测量任务。
专利US6762845B2公开了一种光束旋转平移自校准结构,使得被测镜相对于干涉仪的角度偏转产生的光斑偏移,经多次反射后,干涉仪接收到的参考光斑和测量光斑一直保持重合,该方案可显著增大干涉仪测角范围。该专利方案所述的干涉仪测量装置由表面多次反射实现。暂无针对表面衍射的测量应用方案。专利US9410796B2公开了一种高倍细分的光栅位移测量装置,方案采用二维光栅,实现光栅平面方向二维位移测量。该系统采用二维光栅,光功率利用率较低,且不能进行垂直光栅面方向的位移测量。
发明内容
为解决上述问题,本发明提供一种光栅尺测量装置及测量方法,以提高光栅尺测量的光学分辨率,增大垂向测量范围。
本发明提供的一种光栅尺测量装置,包括:光源、读头及光栅,所述读头包括第一反射单元和第二反射单元,所述第一反射单元和所述第二反射单元均包括至少两个第一反射元件和至少一个第二反射元件,所述光源发射的第一光束和第二光束由读头入射至光栅,经所述光栅衍射或反射及所述第一反射元件、所述第二反射元件反射后在所述光栅上的光斑位置至少有部分重叠,且经所述光栅衍射后沿同一方向出射。
可选的,所述第一反射单元和所述第二反射单元在水平向上相对所述光栅的中轴对称设置。
可选的,第一反射元件用于反向回射衍射光束,第一反射元件的出射光束和入射光束平行且方向相反,入射光束和出射光束偏离一定距离。
可选的,所述第一反射元件沿水平向正负衍射方向成对出现,用以成倍增加水平向光学细分数。
可选的,所述第一反射元件为角锥棱镜,直角棱镜,猫眼反射器,道威棱镜或者屋脊棱镜。
可选的,所述第二反射元件用于将衍射光束偏离一定距离后再次反射至所述光栅,且具有一空间夹角的两光束经所述第二反射元件反射后的出射光束的空间夹角不变。
可选的,所述第二反射元件是一个整体元件,包括平移反射镜、角锥棱镜、直角棱镜、猫眼反射器、道威棱镜或者屋脊棱镜。
可选的,所述第二反射元件是两个独立的元件组合,以分别反射两光束,使两光束经所述第二反射元件反射后空间夹角不变。
可选的,所述第二反射元件包括平移反射镜组、角锥棱镜组、直角棱镜组、猫眼反射器组、道威棱镜组或者屋脊棱镜组。
可选的,所述光栅为一维光栅或二维光栅,所述第一光束和所述第二光束在所述光栅上发生的衍射至少在正负级衍射方向上有衍射光强。
可选的,光栅尺测量装置还包括:光探测单元和光信号处理单元,所述光探测单元用于探测出射的衍射光束并输送至所述光信号处理单元进行分析处理。
可选的,所述光源与所述读头之间设置有入光光纤,所述读头与所述光探测单元之间设置有出光光纤,所述入光光纤、所述出光光纤和所述读头集成为一光纤式微型结构。
可选的,光栅尺测量装置还包括:光束角度控制器,用于控制所述第一光束和所述第二光束的方向,使所述第一光束和所述第二光束平行入射至所述光栅。
可选的,光束角度控制器包括楔角片、楔角片对、衍射光栅或双折射元件。
可选的,所述光源为相干光源或非相干光源。
可选的,所述相干光源为单频光源或双频光源。
可选的,所述第一光束和所述第二光束为同偏振态光束,具有一定偏振夹角的光束,或所述第一光束和所述第二光束偏振态正交。
可选的,所述第一光束和所述第二光束为非偏振光束。
本发明还提供一种光栅尺测量方法,采用上述的光栅尺测量装置,包括以下步骤:
光源发射出第一光束和第二光束并由读头入射至光栅;
控制第一反射元件和第二反射元件的相对位置,使所述第一光束和所述第二光束沿同一方向出射,且出射前在所述光栅上的光斑位置至少有部分重叠。
可选的,所述第一光束和所述第二光束同步入射,且所述第一光束和所述第二光束在所述光栅上的入射位置不同。
可选的,所述第一光束和所述第二光束在所述光栅上的出射位置与入射位置均不同。
可选的,所述第一光束入射至所述光栅后,产生-n级衍射光束,经第一反射单元反向回射至所述光栅,发生-n级衍射后沿第一方向出射;所述第二光束入射至所述光栅后,产生+m级衍射光束,经第二反射单元反向回射到所述光栅,发生+m级衍射后沿第一方向出射;控制第一反射元件和第二反射元件的相对位置,使所述第一光束衍射后的出射光束与所述第二光束衍射后的出射光束重叠,形成水平向位移信号。
可选的,所述第一光束入射所述光栅后,产生-n级衍射光束,经第一反射单元反向回射至所述光栅,发生+n级衍射后沿第二方向出射;所述第二光束入射至所述光栅后,产生+m级衍射光束,经第二反射单元和第一反射单元反向回射到所述光栅,发生+m级衍射后沿第二方向出射;控制第一反射元件和第二反射元件的相对位置,使所述第一光束衍射后的出射光束与所述第二光束衍射后的出射光束重叠,形成垂向位移信号。
可选的,所述第一反射单元和所述第二反射单元均包括两个第一反射元件和一个第二反射元件,当m=n时,在第一方向上形成包含水平向相位变化的干涉信号,则水平向的位移值为:
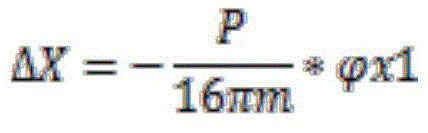
其中,p为光栅的栅距,m为衍射级次,m为±1,±2,±3…, 为第一方向出射干涉光束向的相位变化。
为第一方向出射干涉光束向的相位变化。
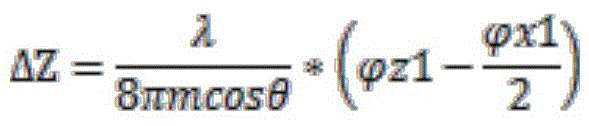
可选的,当m=n时,在第二方向上形成包含垂向相位变化的干涉信号,则垂向位移值为:
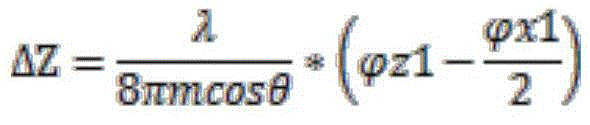
其中,λ为激光波长,p为光栅的栅距,m为衍射级次,m为±1,±2,±3…,θ为光束垂直入射光栅后形成的m级衍射角, 为第二方向出射干涉光束的相位变化。
为第二方向出射干涉光束的相位变化。
可选的,所述光栅垂向位移时,所述第二反射元件平移光束以使经所述第一反射元件反射产生的光束偏离相互抵消,实现位移补偿。
可选的,所述第一反射元件反向回射产生的光束偏移在同一维度,设置所述第二反射元件的光束平移与所述第一反射元件反向回射产生的光束偏离在同一维度;若第一反射元件反向回射产生的光束偏移相互正交时,设置所述第二反射元件的光束平移与光束经光栅第一次入射的第一反射元件的反向回射产生的光束偏移在同一维度。
可选的,设置所述第二反射元件的光束平移与所述第一反射元件反向回射产生的光束偏离在同一维度时,第二反射元件的出射光束相对于入射光束反向并平移一段距离,且入射光束和反射光束之间的角度之和为零或360度的整数倍。
可选的,所述第一光束和所述第二光束沿同一方向出射后,所述光探测单元探测到出射的衍射光束并输送至所述光信号处理单元进行分析处理。
可选的,所述第一光束和所述第二光束通过入光光纤由光源传输至读头,通过出光光纤由读头传输至光探测单元。
与现有技术相比,本发明具有以下有益效果:
1、可利用一维光栅实现二维位置测量,提高系统光学细分倍数;
2、可补偿由于光栅和读头之间垂向运动带来的测量光斑偏离,保持测量光斑具有最佳有效信号,增大光栅尺测量装置的垂向测量范围。
附图说明
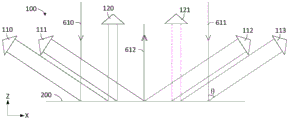
图1为实施例一提供的光栅尺测量装置的结构示意图;
图2a和图2b为实施例一提供的光栅尺测量装置的测量原理图;
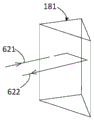
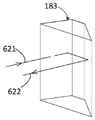
图3a至图3d为实施例一提供的光栅尺测量装置中第一反射元件的结构示意图;
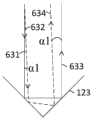
图4为实施例一提供的光栅尺测量装置中第二反射元件的结构示意图;
图5a和图5b为实施例二提供的光栅尺测量装置中增大垂向测量范围的测量原理图;
图6a和图6b为实施例二提供的光栅尺测量装置中第二反射元件的结构示意图;
图7为实施例三提供的光栅尺测量装置的测量原理图;
图8为实施例三提供的光栅尺测量装置中光栅表面的光斑分布;
图9为实施例三提供的光栅尺测量方法的流程图。
100-读头;200-光栅;300-光探测单元;400-光信号处理单元;500-光束角度控制器;600-光源;
110、111、112、113-第一反射元件;120、121、130、131、140、141、123-第二反射元件;610-第一光束;611-第二光束;621、631、632-入射光束;612、613、622、633、634-出射光束;180-角锥棱镜;181-直角棱镜;182-猫眼反射器;183-道威棱镜;1821-透镜;1822-凹面反射镜;184、185-第二反射元件的组合结构;1841、1842、1843、1851、1852、1853-反射镜。
具体实施方式
以下结合附图和具体实施例对本发明的光栅尺测量装置及测量方法作进一步详细说明。根据下面的说明和附图,本发明的优点和特征将更清楚,然而,需说明的是,本发明技术方案的构思可按照多种不同的形式实施,并不局限于在此阐述的特定实施例。附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
在说明书和权利要求书中的术语“第一”“第二”等用于在类似要素之间进行区分,且未必是用于描述特定次序或时间顺序。要理解,在适当情况下,如此使用的这些术语可替换,例如可使得本文所述的本发明实施例能够以不同于本文所述的或所示的其他顺序来操作。类似的,如果本文所述的方法包括一系列步骤,且本文所呈现的这些步骤的顺序并非必须是可执行这些步骤的唯一顺序,且一些所述的步骤可被省略和/或一些本文未描述的其他步骤可被添加到该方法。若某附图中的构件与其他附图中的构件相同,虽然在所有附图中都可轻易辨认出这些构件,但为了使附图的说明更为清楚,本说明书不会将所有相同构件的标号标于每一图中。
实施例一
图1为本实施例提供的光栅尺测量装置的结构示意图,如图1所示,本实施例提供的光栅尺测量装置包括:光源600、读头100、光栅200、光探测单元300及光信号处理单元400,所述读头100包括第一反射单元和第二反射单元,所述第一反射单元和所述第二反射单元均包括至少两个第一反射元件和至少一个第二反射元件,所述光源600发射的第一光束和第二光束由读头100入射至光栅200,经所述光栅200衍射及所述第一反射元件、所述第二反射元件反射后在所述光栅200上的光斑位置至少有部分重叠,且经所述光栅200衍射后沿同一方向出射,所述光探测单元300探测到出射的衍射光束并输出至所述光信号处理单元400。
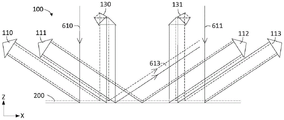
示例性的,本实施例中所述第一反射单元和所述第二反射元件均包括两个第一反射元件和一个第二反射元件,在本发明其他实施例中,所述第二反射元件中第一反射元件和第二反射元件的数量和设置也可以采用其他方式。图2a和图2b为本实施例光栅尺测量装置的测量原理图,参考图2a和图2b所示,所述第一反射单元和所述第二反射单元在水平向(X向)上相对所述光栅200的中轴对称设置。具体的,所述第一反射单元的第一反射元件110、111与所述第二反射单元的第一反射元件112、113在水平向对称设置,所述第一反射单元的第二反射元件120与所述第二反射单元的第二反射元件121在水平向对称设置。
其中,所述第一反射元件用于反向回射衍射光束,入射和出射所述第一反射元件的光束的传输方向平行、传输方向相反,且入射光束和出射光束偏离一定距离。所述第一反射元件沿水平向正负衍射方向成对出现,用以成倍增加水平向光学细分数,参考图3a至图3d,所述第一反射元件例如可以为角锥棱镜180,直角棱镜181,猫眼反射器182,道威棱镜183或者屋脊棱镜(图中未示出)。示例性的,如图3c所示,所述第一反射元件采用猫眼反射器182,猫眼反射器182由一个透镜1821和一个凹面反射镜1822组成,所述凹面反射镜1822的球心置于所述透镜1821的主点上,所述透镜1821的焦点在所述凹面反射镜182的反射面上,入射光束621由所述透镜1821会聚到所述凹面反射镜1822上,并被所述凹面反射镜1822反射,再经过所述透镜1821后出射光束622仍平行于原入射光束621,但方向相反,且所述入射光束621相对所述出射光束偏离一定距离。
所述第二反射元件用于将衍射光束偏离一定距离后再次反射至所述光栅,所述第二反射元件不要求进入该元件的反射光束相对于入射光束完全平行,只需要保证两入射光束的多次衍射光,进入第二反射元件前的夹角α1,在经过第二反射元件后,出射光束的夹角相同,同样为α1即可。如图4所示,入射光束631、632的空间夹角为α1,经过所述第二反射元件123后,出射光束633、634的空间夹角仍为α1,即具有一空间夹角的两光束经所述第二反射元件反射后的出射光束的空间夹角不变。所述第二反射元件在光栅尺测量装置的特性是:保证入射两光束的夹角,经过第二反射元件后,出射光束的夹角不变,且保证出射光束相对于入射光束偏离一定距离。所述第二反射元件在光栅尺测量装置中可以是两个独立的元件存在,每个元件独立保证出射光光与入射光光平行,由此保证两个光束的夹角不变,例如所述第二反射元件包括平移反射镜组、角锥棱镜组、直角棱镜组、猫眼反射器组、道威棱镜组或屋脊棱镜组等;所述第二反射元件也可以是一个反射元件,只保证两个光束夹角不变。例如所述第二反射元件包括平移反射镜、角锥棱镜、直角棱镜、猫眼反射器、道威棱镜或屋脊棱镜等。
本实施例中所述光源与所述读头之间设置有入光光纤,所述读头与所述光探测单元之间设置有出光光纤,所述第一光束和所述第二光束通过所述入光光纤由光源入射至读头,通过所述出光光纤由读头出射至光探测单元。所述入光光纤、所述出光光纤和所述读头集成为一光纤式微型结构,光栅尺测量装置的结构尺寸,提高了测量便利性,扩大应用范围。
另外,参考图1所示,本实施例提供的光栅尺测量装置还包括:光束角度控制器500,用于控制光源600发出的所述第一光束和所述第二光束的方向,使所述第一光束和所述第二光束平行入射至所述光栅200。所述光束角度控制器500包括楔角片、楔角片对、衍射光栅、双折射元件。
本实施例还提供一种光栅尺测量方法,如图9所示,本实施例提供的光栅尺测量方法包括以下步骤:
S01:光源发射出第一光束和第二光束并由读头入射至光栅;
S02:控制第一反射元件和第二反射元件的相对位置,使所述第一光束和所述第二光束沿同一方向出射且出射前在所述光栅上的光斑位置至少有部分重叠。
具体的,首先执行步骤S01,光源600发射出第一光束610和第二光束611并由读头100入射至光栅200。所述光源600可以为相干光源或非相干光源,所述第一光束610和所述第二光束611可以是具有相同光波长的单频光束,例如可以直接从同一激光器,用光能量分配元件分出两束激光束,也可以是波长稍有差异的双频光束,双频光束实现方案可以是采用自由空间双频激光器,用偏振分光棱镜分离两个偏振态,并控制两束光平行出射,然后用偏振器件如二分之一波片、两个四分之一波片、旋光器等等,控制两束光之一的偏振态;也可以是采用光纤传输的双频激光器,这种双频激光器由单频激光器经过声光频移,或其他频移调制方法,形成频率有一定差异的两束光,通过光纤耦合后,提供给读头100。所述第一光束610和所述第二光束611为同偏振态光束,或者所述第一光束610和所述第二光束611具有一定偏振夹角,或者所述第一光束610和所述第二光束611偏振态正交,或者所述第一光束610和所述第二光束611为非偏振光束。所述第一光束610和所述第二光束611可以是稳频激光束,也可以是非稳频激光束。
所述第一光束610和所述第二光束611相距一定距离由读头100入射光栅200。所述第一光束610和所述第二光束611可以为平行光束,也可以为非平行光束。所述第一光束610和所述第二光束611不平行时,可以通过光束角度控制器500控制光束方向,使第一光束610和第二光束611平行入射光栅200,以实现在相位探测时第一光束610和第二光束611的衍射光束平行出射。所述第一光束610和所述第二光束611同步入射,且所述第一光束610和所述第二光束611在所述光栅200上的入射位置不同。所述光栅200为一维光栅或二维光栅,所述第一光束610和所述第二光束611在所述光栅200上发生的衍射至少在正负级衍射方向上有衍射光强。
接着,执行步骤S02,控制第一反射元件和第二反射元件的相对位置,使所述第一光束和所述第二光束沿同一方向出射且出射前在所述光栅200上的光斑位置至少有部分重叠。具体的,首先,所述第一光束610入射至所述光栅后,产生-n级衍射光束,经第一反射单元反向回射至所述光栅200,发生-n级衍射后沿第一方向出射;所述第二光束611入射至所述光栅200后,产生+m级衍射光束,经第二反射单元反向回射到所述光栅200,发生+m级衍射后沿第一方向出射。控制第一反射单元和第二反射单元中第一反射元件和第二反射元件的相对位置,使所述第一光束衍射后的出射光束与所述第二光束衍射后的出射光束重叠,形成水平向位移信号;
然后,所述第一光束610入射所述光栅200后,产生-n级衍射光束,经第一反射单元反向回射至所述光栅200,发生+n级衍射后沿第二方向出射;所述第二光束入射至所述光栅200后,产生+m级衍射光束,经第二反射单元和第一反射单元反向回射到所述光栅,发生+m级衍射后沿第二方向出射。控制第一反射单元和第二反射单元中第一反射元件和第二反射元件的相对位置,使所述第一光束衍射后的出射光束与所述第二光束衍射后的出射光束重叠,形成垂向位移信号。
参考图2a和图2b所示,以所述第一反射单元包括两个第一反射元件110、111,一个第二反射元件120,所述第二反射单元包括两个第一反射元件112、113,一个第二反射元件121为例,介绍获取水平向位移信号和垂向位移信号的过程。第一光束610和第二光束611以任意非利特罗角度入射所述光栅200,本实施例中第一光束610和第二光束611垂直所述光栅200平行入射,参考图2a所示,所述第一光束610入射光栅200后产生-n级衍射光束,经第一反射元件110反射至光栅200,在光栅200上产生-n级衍射光束、经第二反射元件120反射至光栅200,产生-n级衍射光束,经第一反射元件111反向回射至光栅200,发生-n级衍射后沿光束612方向出射。同时,第二光束611入射光栅200后产生+m级衍射,衍射光束经第一反射元件112、第二反射元件121及第一反射元件113反向回射至光栅200,并发生+m级衍射,当第一反射元件110、111、112、113,第二反射元件120、121的位置经特殊设计后,可以使第二光束611的-n级四次衍射光束与第一光束610的+m级四次衍射光束在光栅200表面重合,均沿光束612方向出射,形成水平向位移信号。
所述第一光束610入射光栅200后产生-n级衍射光束,经第一反射元件110反射至光栅200,在光栅200上产生-n级衍射光束、经第二反射元件120反射至光栅200,产生+n级衍射光束后沿光束613方向出射;所述第二光束611入射光栅200后,产生+m级衍射光束,经第一反射元件113、第二反射元件121、第一反射元件112及第一反射元件111后沿光束613方向出射。当第一反射元件110、111、112、113,第二反射元件120、121的位置经特殊设计后,可以使第一光束610的衍射光束与第二光束611的衍射光束重合,均沿光束613方向出射,该干涉信号中包含垂向位移信号。需要说明的是,所述第一光束610和所述第二光束611经第一反射元件、第二反射元件及光栅200的衍射和反射后在光栅200上的出射位置与所述第一光束610和所述第二光束611的第一次入射至所述光栅200的入射位置不同。
然后,所述第一光束610和所述第二光束611沿同一方向出射后,所述光探测单元300探测到出射的衍射光束并输送至所述光信号处理单元400进行分析处理。具体的,当m=n时,沿光束612方向形成包含水平向相位变化的干涉信号。光束612中包含的X水平向位移信息的相位变化 的表达式为:
的表达式为:

其中,p为光栅的栅距,m为衍射级次,m为±1,±2,±3…
同理,当m=n时,沿光束613方向形成包含垂向相位变化的干涉信号。光束613中包含的垂向位移信息的相位变化 的表达式为:
的表达式为:

其中,λ为激光波长,p为光栅的栅距,m为衍射级次,m为±1,±2,±3…,θ为光束垂直入射光栅后形成的m级衍射角(参考图2a),ΔX为水平向位移值。
根据以上测量原理分析,可知待测水平向(X向)和垂向(Z向)位移与读头测量相位之间的关系如下:
水平向的位移值ΔX:

垂向的位移值ΔZ:

实施例二
本实施例提供一种光栅尺测量装置和方法,与第一实施例不同的是本实施例中光栅尺测量装置中可利用第二反射元件实现垂向位移补偿。即光栅和读头之间垂向运动带来的测量光斑偏离,可以通过第二反射元件平移光束以使经所述第一反射元件反射产生的光束偏离相互抵消,来实现位移补偿,保持测量光斑具有最佳有效信号,增大光栅尺测量装置的垂向测量范围。
具体的,请参考图5a和图5b所示,第一反射元件110和第一反射元件111反向回射产生的光束偏移在同一维度,设置第二反射元件130的光束平移与第一反射元件110和第一反射元件111反向回射产生的光束偏离在同一维度,第二反射元件130的光束平移使第一反射元件110和第二反射元件111反向回射产生的光束偏移相互抵消,实现垂向位移补偿;同理,设置第二反射元件131的光束平移与第一反射元件112和第一反射元件113反向回射产生的光束偏离在同一维度。
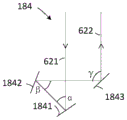
当所述第一反射元件反向回射产生的光束偏移在同一维度,为实现第二反射元件同维度光束平移以补偿垂向位移,第二反射元件130的出射光束相对于入射光束反向并平移一段距离,且入射光束和反射光束之间的角度之和为零或360度的整数倍。示例性的,第二反射元件130可以采用图6a中的组合结构184,所述组合结构184包括反射镜1841、反射镜1842及反射镜1843,光束621入射至反射镜1841,逆时针旋转α角度反射至反射镜1842,然后逆时针旋转β角度反射至反射镜1843,最后顺时针旋转γ角度沿光束622方向出射,其中α,β和γ定义为由入射光束往出射光束方向转动形成的角度,逆时针方向为负值,顺时针方向为正值。在图6a中,旋转角度α为负值,角度β为负值,角度γ为正值,且α+β+γ=0。第二反射元件130还可以采用图6b中的组合结构185,所述组合结构185包括反射镜1851、反射镜1852及反射镜1853,光束621入射至反射镜1851,顺时针旋转α角度反射至反射镜1852,然后顺时针旋转β角度反射至反射镜1853,最后顺时针旋转γ角度沿光束622方向出射,α+β+γ=360°。在本发明其他实施例中,第二反射元件130可以采用其他组合方式,只要满足出射光束相对于入射光束角度之和为0度或360度整数倍即可。
通过设置第二反射元件130、131,可避免光栅200和读头100之间垂向运动带来的测量光斑偏离。具体的,请参考图5a所示,第一光束610和第二光束611以任意非利特罗角度入射光栅200,当光栅200由原有实线所示位置沿垂直光栅方向移动至虚线所示位置时,第一光束610经第一反射元件110、第二反射元件130和第一反射元件111作用后,输出水平向位移信号的光束612不发生位置变化;第二光束611经第一反射元件113、第二反射元件131和第一反射元件112作用后,输出水平向位移信号的光束612不发生位置变化。因此,光栅200相对于读头100垂向移动时光束612不发生光束偏离,即光栅200沿垂向移动不影响水平向位移信号测量。请参考图5b所示,当光栅200由原有实线所示位置沿垂直光栅200方向移动至虚线所示位置时,第一光束610经第一反射元件110和第二反射元件130作用后,输出包含垂向位移信号的光束613位置变化至虚线处;第二光束611经第一反射元件113、第二反射元件131、第一反射元件112和第一反射元件111作用后,输出包含垂向位移信号的光束613位置也变化至虚线处。因此,光栅200相对于读头100垂向移动时,光束613中包含的第一光束610和第二光束611的衍射光束仍然重合,光束613的位置发生偏离,可保持测量光斑具有最佳有效信号。
实施例三
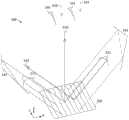
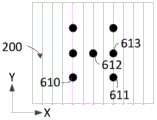
本实施例提供一种紧凑布局光栅尺测量装置及测量方法,本实施例在实施例二的基础上,通过将第一反射元件反向回射产生的光束偏移设置在正交维度,使光斑在光栅表面形成对称的紧凑布局。请参考图7所示,第一反射元件110、113沿Y向反射光束,第二反射元件140、141沿Y向反射光束,第一反射元件111、112沿X向反射光束。第一光束610和第二光束611以任意非利特罗角度入射光栅200,第一光束610经第一反射元件110、第二反射元件140、第一反射元件111作用后,沿光束612出射,第二光束611经第一反射元件113、第二反射元件141、第一反射元件112作用沿光束612出射,光束612中包含的水平向位移信息的相位变化。进一步的,第一光束610经第一反射元件110、第二反射元件140、第一反射元件111、第二反射元件112作用后,沿光束613出射,第二光束611经第一反射元件113、第二反射元件141、光栅200衍射作用后,沿光束613出射,光束613中包含的垂向位移信息的相位变化。图8为本实施例中光栅200表面的光斑分布,如图8所示,设置第一反射元件110、113与第一反射元件111、112反向回射产生的光束偏移在正交维度,使光斑紧凑并对称排列。
本实施例中所述第一反射元件反向回射产生的光束偏移不在同一维度,如图7所示,第一反射元件110、113与第一反射元件111、112反向回射产生的光束偏移在正交维度,为实现垂向位移补偿,设置第二反射元件140的光束平移与第一反射元件110反向回射产生的光束偏移在同一维度,即第二反射元件140、141沿Y向反射光束。所述第二反射元件140、141可以为角锥棱镜、直角棱镜、直角棱镜组、道威棱镜、道威棱镜组、屋脊棱镜、屋脊棱镜组等。
在本发明其他实施例中,可以将第一反射元件反向回射产生的光束偏移在同一维度时第二反射元件130、131的设置和第一反射元件反向回射产生的光束偏移在正交维度时第二反射元件140、141的设置进行结合,进行组合设计。
综上所述,本发明提供一种光栅尺测量装置及测量方法,包括:光源、读头、光栅、光探测单元及光信号处理单元,所述读头包括第一反射单元和第二反射单元,所述第一反射单元和所述第二反射单元均包括至少两个第一反射元件和至少一个第二反射元件,所述光源发射的第一光束和第二光束由所述读头入射至所述光栅,经所述光栅衍射或反射及所述第一反射元件、所述第二反射元件反射后在所述光栅上的光斑位置至少有部分重叠,且经所述光栅衍射或反射后沿同一方向出射,所述光探测单元探测到出射的衍射光束并输送至所述光信号处理单元。本发明可利用一维光栅实现二维位置测量,提高系统光学细分倍数,同时可补偿由于光栅和读头之间垂向运动带来的测量光斑偏离,保持测量光斑具有最佳有效信号,显著增大光栅尺测量装置的垂向测量范围。
需要说明的是,本说明书中的各个实施例均采用相关的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。尤其,对于结构实施例而言,由于其基本相似于方法实施例,所以描述的比较简单,相关之处参见方法实施例的部分说明即可。
上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
Claims (27)
1.一种光栅尺测量装置,其特征在于,包括:光源、读头及光栅,所述读头包括第一反射单元和第二反射单元,所述第一反射单元和所述第二反射单元均包括至少两个第一反射元件和至少一个第二反射元件,所述光源发射的第一光束和第二光束由读头入射至光栅,经所述光栅衍射或反射及所述第一反射元件、所述第二反射元件反射后在所述光栅上的光斑位置至少有部分重叠,且经所述光栅衍射后沿同一方向出射;
其中,所述第一反射单元和所述第二反射单元在水平向上相对所述光栅的中轴对称设置;
所述第一反射元件用于反向回射衍射光束,第一反射元件的出射光束和入射光束平行且方向相反,入射光束和出射光束偏离一定距离;
所述第二反射元件用于将衍射光束偏离一定距离后再次反射至所述光栅,且具有一空间夹角的两光束经所述第二反射元件反射后的出射光束的空间夹角不变。
2.根据权利要求1所述的光栅尺测量装置,其特征在于,所述第一反射元件沿水平向正负衍射方向成对出现,用以成倍增加水平向光学细分数。
3.根据权利要求1所述的光栅尺测量装置,其特征在于,所述第一反射元件为角锥棱镜、直角棱镜、猫眼反射器、道威棱镜或者屋脊棱镜。
4.根据权利要求1所述的光栅尺测量装置,其特征在于,所述第二反射元件是一个整体元件,包括平移反射镜、角锥棱镜、直角棱镜、猫眼反射器、道威棱镜或者屋脊棱镜。
5.根据权利要求1所述的光栅尺测量装置,其特征在于,所述第二反射元件是两个独立的元件组合,以分别反射两光束,使两光束经所述第二反射元件反射后空间夹角不变。
6.根据权利要求5所述的光栅尺测量装置,其特征在于,所述第二反射元件包括平移反射镜组、角锥棱镜组、直角棱镜组、猫眼反射器组、道威棱镜组或者屋脊棱镜组。
7.根据权利要求1所述的光栅尺测量装置,其特征在于,所述光栅为一维光栅或二维光栅,所述第一光束和所述第二光束在所述光栅上发生的衍射至少在正负级衍射方向上有衍射光强。
8.根据权利要求1所述的光栅尺测量装置,其特征在于,还包括:光探测单元和光信号处理单元,所述光探测单元用于探测出射的衍射光束并输送至所述光信号处理单元进行分析处理。
9.根据权利要求8所述的光栅尺测量装置,其特征在于,所述光源与所述读头之间设置有入光光纤,所述读头与所述光探测单元之间设置有出光光纤,所述入光光纤、所述出光光纤和所述读头集成为一光纤式微型结构。
10.根据权利要求1所述的光栅尺测量装置,其特征在于,还包括:光束角度控制器,用于控制所述第一光束和所述第二光束的方向,使所述第一光束和所述第二光束平行入射至所述光栅。
11.根据权利要求10所述的光栅尺测量装置,其特征在于,光束角度控制器包括楔角片、楔角片对、衍射光栅或双折射元件。
12.根据权利要求1所述的光栅尺测量装置,其特征在于,所述光源为相干光源或非相干光源。
13.根据权利要求12所述的光栅尺测量装置,其特征在于,所述相干光源为单频光源或双频光源。
14.根据权利要求1所述的光栅尺测量装置,其特征在于,所述第一光束和所述第二光束为同偏振态光束;或所述第一光束和所述第二光束为具有一定偏振夹角的光束;或所述第一光束和所述第二光束偏振态正交。
15.根据权利要求1所述的光栅尺测量装置,其特征在于,所述第一光束和所述第二光束为非偏振光束。
16.一种光栅尺测量方法,其特征在于,采用如权利要求1-15中任一项所述的光栅尺测量装置,包括以下步骤:
光源发射出第一光束和第二光束并由读头入射至光栅;
控制第一反射元件和第二反射元件的相对位置,所述第一光束和所述第二光束经所述光栅衍射或反射及所述第一反射元件、所述第二反射元件反射后沿同一方向出射,且出射前在所述光栅上的光斑位置至少有部分重叠;
其中,所述第一反射单元和所述第二反射单元在水平向上相对所述光栅的中轴对称设置,所述第一光束和所述第二光束的衍射光束经所述第一反射元件和所述第二反射元件后均偏离一定距离后反向回射。
17.根据权利要求16所述的光栅尺测量方法,其特征在于,所述第一光束和所述第二光束同步入射,且所述第一光束和所述第二光束在所述光栅上的入射位置不同。
18.根据权利要求17所述的光栅尺测量方法,其特征在于,所述第一光束和所述第二光束在所述光栅上的出射位置与入射位置均不同。
19.根据权利要求18所述的光栅尺测量方法,其特征在于,所述第一光束入射至所述光栅后,产生-n级衍射光束,经第一反射单元反向回射至所述光栅,发生-n级衍射后沿第一方向出射;所述第二光束入射至所述光栅后,产生+m级衍射光束,经第二反射单元反向回射到所述光栅,发生+m级衍射后沿第一方向出射;控制第一反射元件和第二反射元件的相对位置,使所述第一光束衍射后的出射光束与所述第二光束衍射后的出射光束重叠,形成水平向位移信号。
20.根据权利要求19所述的光栅尺测量方法,其特征在于,所述第一光束入射所述光栅后,产生-n级衍射光束,经第一反射单元反向回射至所述光栅,发生+n级衍射后沿第二方向出射;所述第二光束入射至所述光栅后,产生+m级衍射光束,经第二反射单元和第一反射单元反向回射到所述光栅,发生+m级衍射后沿第二方向出射;控制第一反射元件和第二反射元件的相对位置,使所述第一光束衍射后的出射光束与所述第二光束衍射后的出射光束重叠,形成垂向位移信号。
21.根据权利要求20所述的光栅尺测量方法,其特征在于,所述第一反射单元和所述第二反射单元均包括两个第一反射元件和一个第二反射元件,当m=n时,在第一方向上形成包含水平向相位变化的干涉信号,则水平向的位移值为:

其中,p为光栅的栅距,m为衍射级次,m为±1,±2,±3…, 为第一方向出射干涉光束的相位变化。
为第一方向出射干涉光束的相位变化。
22.根据权利要求21所述的光栅尺测量方法,其特征在于,当m=n时,在第二方向上形成包含垂向相位变化的干涉信号,则垂向位移值为:
其中,λ为激光波长,p为光栅的栅距,m为衍射级次,m为±1,±2,±3…,θ为光束垂直入射光栅后形成的m级衍射角, 为第二方向出射干涉光束的相位变化。
为第二方向出射干涉光束的相位变化。
23.根据权利要求16所述的光栅尺测量方法,其特征在于,所述光栅垂向位移时,所述第二反射元件平移光束以使经所述第一反射元件反射产生的光束偏离相互抵消,实现位移补偿。
24.根据权利要求23所述的光栅尺测量方法,其特征在于,所述第一反射元件反向回射产生的光束偏移在同一维度,设置所述第二反射元件的光束平移与所述第一反射元件反向回射产生的光束偏离在同一维度;若第一反射元件反向回射产生的光束偏移相互正交时,设置所述第二反射元件的光束平移与光束经光栅第一次入射的第一反射元件的反向回射产生的光束偏移在同一维度。
25.根据权利要求24所述的光栅尺测量方法,其特征在于,设置所述第二反射元件的光束平移与所述第一反射元件反向回射产生的光束偏离在同一维度时,第二反射元件的出射光束相对于入射光束反向并平移一段距离,且入射光束和反射光束之间的角度之和为零或360度的整数倍。
26.根据权利要求16所述的光栅尺测量方法,其特征在于,所述光栅尺测量装置还包括:光探测单元和光信号处理单元,所述光栅尺测量方法还包括:所述第一光束和所述第二光束沿同一方向出射后,所述光探测单元探测到出射的衍射光束并输送至所述光信号处理单元进行分析处理。
27.根据权利要求26所述的光栅尺测量方法,其特征在于,所述第一光束和所述第二光束通过入光光纤由光源入射至读头,通过出光光纤由读头出射至光探测单元。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910935450.2A CN112577431B (zh) | 2019-09-29 | 2019-09-29 | 光栅尺测量装置及测量方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910935450.2A CN112577431B (zh) | 2019-09-29 | 2019-09-29 | 光栅尺测量装置及测量方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112577431A CN112577431A (zh) | 2021-03-30 |
| CN112577431B true CN112577431B (zh) | 2022-02-08 |
Family
ID=75111353
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910935450.2A Active CN112577431B (zh) | 2019-09-29 | 2019-09-29 | 光栅尺测量装置及测量方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112577431B (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7362218B2 (ja) * | 2020-03-12 | 2023-10-17 | 株式会社ミツトヨ | 光学式変位センサ |
| CN114440945B (zh) * | 2022-02-28 | 2023-06-16 | 中北大学 | 一种基于双层圆孔点阵二维光栅的可调谐光学角度编码器 |
| CN117948897B (zh) * | 2024-03-27 | 2024-06-04 | 中国科学院长春光学精密机械与物理研究所 | 一种混合位移测量装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3144143B2 (ja) * | 1993-04-13 | 2001-03-12 | ソニー・プレシジョン・テクノロジー株式会社 | 光学式変位測定装置 |
| DE102006042743A1 (de) * | 2006-09-12 | 2008-03-27 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung |
| CN102878938A (zh) * | 2012-09-26 | 2013-01-16 | 哈尔滨工业大学 | 一种基于衍射光栅的光学读数头 |
| CN104949616A (zh) * | 2014-03-25 | 2015-09-30 | 上海微电子装备有限公司 | 回射式光栅尺测量系统及其应用 |
| CN104006739B (zh) * | 2014-05-29 | 2016-06-15 | 清华大学 | 一种光学八细分线性干涉仪 |
| CN104729411B (zh) * | 2015-03-10 | 2017-07-14 | 中国科学院上海光学精密机械研究所 | 基于高密度光栅的高分辨率光栅干涉仪 |
| CN104729402B (zh) * | 2015-03-23 | 2017-05-03 | 中国科学院上海光学精密机械研究所 | 基于平面镜的高光学细分光栅干涉仪 |
| CN105203031A (zh) * | 2015-09-14 | 2015-12-30 | 中国科学院上海光学精密机械研究所 | 四倍光学细分的两轴外差光栅干涉仪 |
| CN105136022B (zh) * | 2015-09-14 | 2017-07-14 | 中国科学院上海光学精密机械研究所 | 自准直光栅干涉仪高光学细分结构 |
| CN107664482B (zh) * | 2016-07-29 | 2019-08-23 | 上海微电子装备(集团)股份有限公司 | 光栅测量装置 |
-
2019
- 2019-09-29 CN CN201910935450.2A patent/CN112577431B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN112577431A (zh) | 2021-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI784265B (zh) | 位移測量裝置、位移測量方法及光刻設備 | |
| CN110837214B (zh) | 扫描干涉光刻系统 | |
| US8670128B2 (en) | Profile measuring apparatus | |
| CN112577431B (zh) | 光栅尺测量装置及测量方法 | |
| US8687202B2 (en) | Displacement detecting device | |
| CN102288113B (zh) | 光学位置测量设备 | |
| US5369488A (en) | High precision location measuring device wherein a position detector and an interferometer are fixed to a movable holder | |
| CN112484648B (zh) | 外差光纤干涉仪位移测量系统及方法 | |
| US7738112B2 (en) | Displacement detection apparatus, polarization beam splitter, and diffraction grating | |
| JP2007052022A (ja) | 物体を測定するためのシステム及び垂直変位を測定するための方法 | |
| US8477317B2 (en) | Position measuring arrangement | |
| US6166817A (en) | Optical displacement measurement system for detecting the relative movement of a machine part | |
| US20240319619A1 (en) | Phase measurement device for laser interference photolithography system, and method for using same | |
| CN105333816A (zh) | 一种基于光谱色散全场的超横向分辨率表面三维在线干涉测量系统 | |
| JPS63277926A (ja) | 測長装置 | |
| KR100531693B1 (ko) | 광학식 변위측정장치 | |
| CN117031769A (zh) | 干涉仪镜组及位移测量系统 | |
| CN111964587B (zh) | 检测系统、检测方法及光栅尺 | |
| JPS6152403B2 (zh) | ||
| US6919561B2 (en) | Diffraction laser encoder apparatus | |
| CN114152193B (zh) | 运动台光栅测量系统和光刻机 | |
| CN113028998A (zh) | 光学位置测量装置 | |
| JPH095018A (ja) | 移動量測長装置 | |
| KR100332035B1 (ko) | 단일 파장 레이저 광의 다중패스를 이용한 거리 측정장치 및 방법 | |
| CN100573032C (zh) | 用于三维光学测量的系统和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |