WO2024089733A1 - 乗客コンベアの運行制御システム - Google Patents
乗客コンベアの運行制御システム Download PDFInfo
- Publication number
- WO2024089733A1 WO2024089733A1 PCT/JP2022/039481 JP2022039481W WO2024089733A1 WO 2024089733 A1 WO2024089733 A1 WO 2024089733A1 JP 2022039481 W JP2022039481 W JP 2022039481W WO 2024089733 A1 WO2024089733 A1 WO 2024089733A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- passenger conveyor
- escalator
- user
- speaker
- users
- Prior art date
Links
- 238000001514 detection method Methods 0.000 claims abstract description 26
- 238000000034 method Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 238000010801 machine learning Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 2
- 239000003638 chemical reducing agent Substances 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B27/00—Indicating operating conditions of escalators or moving walkways
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B29/00—Safety devices of escalators or moving walkways
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B31/00—Accessories for escalators, or moving walkways, e.g. for sterilising or cleaning
Definitions
- the present invention relates to a passenger conveyor operation control system.
- Patent Document 1 discloses a passenger conveyor equipped with a safety device that stops the operation of the passenger conveyor if people are stranded near the disembarking area.
- Patent Document 2 discloses a passenger conveyor equipped with an entry prevention device that prevents users from entering the passenger conveyor if people are stranded near the disembarking area.
- the passenger conveyor operation control system of the present invention comprises a detection unit that detects users of the passenger conveyor, a speaker that outputs audio to users of the passenger conveyor, and a control unit that controls the operation of the passenger conveyor and controls the audio output of the speaker, and when the control unit is operating in a specified direction, it determines whether users are stuck at the passenger conveyor's disembarkation area based on information from the detection unit, and if it determines that users are stuck, it stops the operation of the passenger conveyor, outputs audio from the speaker to encourage users to face the passenger conveyor's boarding area, and operates the passenger conveyor in the opposite direction.
- the passenger conveyor operation control system of the present invention allows passengers already on board to safely disembark from the passenger conveyor while preventing collisions and falls between passengers at the disembarkation point when congestion occurs near the disembarkation point.
- FIG. 1 is a schematic diagram illustrating a traffic control system according to an embodiment
- 2 is a block diagram showing a functional configuration of a control device according to an embodiment
- FIG. FIG. 2 is a flow diagram showing a flow of operation control according to an embodiment.
- an operation control system for an escalator which is one form of passenger conveyor, will be described.
- an escalator is assumed to be the passenger conveyor, but is not limited to this.
- the passenger conveyor may be, for example, a moving walkway.
- the escalator of this embodiment is assumed to be installed in a commercial facility such as a department store or shopping mall, but is not limited to this.
- the escalator may be installed, for example, in a train station or an office building.
- the operation control system 1 of this embodiment comprises an escalator 10, a detection unit 20 that detects users of the escalator 10, and a speaker 30 that outputs audio to users of the escalator 10.
- the operation control system 1 further comprises a control device 40.
- the control device 40 controls the operating speed and direction of the escalator 10, as well as the audio output of the speaker 30.
- the control device 40 also determines whether or not congestion is occurring at the disembarking area, based on information from the detection unit 20.
- the operation control system 1 is a system that stops the operation of the escalator 10 when a backlog occurs at the landing area, ensures the safety of users of the escalator 10, and then operates the escalator 10 in the reverse direction. This allows users who are already on the escalator 10 to safely disembark from the escalator 10 while preventing collisions and falls between users at the landing area when users are backlogged at the landing area.
- the control device 40 determines whether a backlog occurs at the landing area and whether the safety of users of the escalator 10 is ensured based on information from the detection unit 20.
- the escalator 10 runs to transport users, and includes a stepped hoistway 11 that moves to upper or lower floors of a building.
- the hoistway 11 includes a number of steps (not shown) that are connected in an endless fashion and move in a circular motion to carry users, and balustrades 12 erected on both ends of the steps. Entrances 13 are provided at both ends of the hoistway 11.
- the boarding and alighting entrances 13 include a lower boarding and alighting entrance 13A provided on a lower floor and an upper boarding and alighting entrance 13B provided on an upper floor.
- the lower boarding and alighting entrance 13A is the boarding area
- the upper boarding and alighting entrance 13B is the disembarking area.
- the upper boarding and alighting entrance 13B is the boarding area
- the lower boarding and alighting entrance 13A is the disembarking area.
- the escalator 10 has a drive unit 14 that drives the escalator 10.
- the drive unit 14 is composed of an electric motor, a reducer, an electromagnetic brake, etc., and is installed, for example, below the upper boarding/alighting entrance 13B.
- the detection unit 20 detects users of the escalator 10.
- a camera, LiDAR (Light Detection and Ranging), or millimeter wave radar can be used for the detection unit 20.
- the detection unit 20 may use only one device, or may use multiple devices.
- a camera and LiDAR may be used in combination. By using multiple devices in combination, the accuracy of user detection can be improved.
- the detection unit 20 may be installed in multiple locations. For example, it may be installed at the top of the hoistway 11, the lower boarding/alighting entrance 13A, and the upper boarding/alighting entrance 13B of the escalator 10. By installing the detection unit 20 in multiple locations, the accuracy of user detection can be improved. From the viewpoint of accurately determining the body orientation of a user in the hoistway 11, it is preferable that the detection unit 20 that detects users of the hoistway 11 includes a camera.
- one camera 20 is used as the detection unit 20.
- the camera 20 is a small surveillance camera, and has an imaging element such as a CCD image sensor or a CMOS image sensor.
- the camera 20 is installed at the top near the center of the hoistway 11, and captures the hoistway 11, the lower entrance 13A, and the upper entrance 13B of the escalator 10.
- the camera 20 constantly captures images of users of the escalator 10, and transmits the images to the control device 40 in real time.
- the speaker 30 is a device that outputs audio to users of the escalator 10.
- the speaker 30 has a function of converting a signal sent from the control device 40 into an audio message.
- the speaker 30 may also be provided with an amplifier that amplifies the electrical signal.
- the speakers 30 are lower speaker 30A installed at the bottom of the lower entrance 13A, and upper speaker 30B installed at the bottom of the upper entrance 13B.
- elevator speakers 30C, 30D, and 30E are installed on one of the left and right balustrades 12.
- this includes all of lower speaker 30A, upper speaker 30B, and elevator speakers 30C, 30D, and 30E.
- the control device 40 controls the speed and direction of the escalator 10, as well as the audio output of the speaker 30. Specifically, when the escalator 10 is moving in a predetermined direction, the control device 40 stops the operation of the escalator 10 if a backlog occurs at the landing. The control device 40 then outputs audio from the speaker 30 to encourage users to turn toward the landing side of the escalator 10, and then moves the escalator 10 in the reverse direction.
- the control device 40 is equipped with a CPU as an arithmetic processing device that executes the control of the system, a ROM, a RAM, and a hard disk drive (HDD) as storage devices connected to the CPU, and a communication device that transmits and receives information.
- a CPU as an arithmetic processing device that executes the control of the system
- ROM read only memory
- RAM random access memory
- HDD hard disk drive
- control device 40 is installed below the upper boarding/alighting entrance 13B, but the installation location is not limited to this.
- the control device 40 may be installed, for example, in the building in which the escalator 10 is installed or in a remote monitoring center.
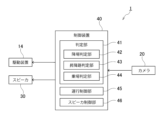
- FIG. 2 is a block diagram showing the functional configuration of the control device 40.
- the control device 40 is connected to the camera 20 as a detection unit, the speaker 30, and the drive device 14.
- the control device 40 includes a determination unit 41 that acquires and analyzes images captured by the camera 20 and determines congestion, etc., an operation control unit 45 that controls the operating speed and direction of the escalator 10, and a speaker control unit 46 that controls the audio output of the speaker 30.
- the determination unit 41 analyzes the images captured by the camera 20.
- the determination unit 41 includes a landing determination unit 42 that determines whether a user is staying at a landing, an elevator shaft determination unit 43 that determines the presence or absence of a user in the elevator shaft 11 and the direction of the user's body, and a landing determination unit 44 that determines the presence or absence of a user at a landing.
- the alighting area determination unit 42 analyzes the image of the alighting area taken by the camera 20 in real time and determines whether or not users are stuck at the alighting area. If the alighting area determination unit 42 determines that users are stuck at the alighting area, the operation control unit 45 stops the escalator 10. This makes it possible to avoid collisions between users near the alighting area.
- the disembarking stop determination unit 42 may determine whether people are stuck at the disembarking stop by, for example, detecting moving objects from the captured image, recognizing the moving objects as users, and determining that a stagnation has occurred if the number of people recognized exceeds a predetermined number, or if the same person stays there for longer than a predetermined time.
- the number of users may also be calculated using machine learning to determine whether people are stuck at the disembarking stop.
- the image captured by the camera 20 is used to determine whether people are stuck at the disembarking stop, but other methods may also be used to determine whether people are stuck at the disembarking stop. For example, LiDAR or millimeter wave radar may be used to calculate the number of people staying at the disembarking stop and determine whether people are stuck at the disembarking stop.
- the elevator shaft determination unit 43 analyzes the image of the user in the elevator shaft 11 taken by the camera 20, and determines whether or not there is a user in the elevator shaft 11 and the direction of the user's body. When the operation of the escalator 10 stops due to congestion at the landing, and the elevator shaft determination unit 43 determines that the user in the elevator shaft 11 is facing the landing, the operation control unit 45 reverses the escalator 10. This allows the user to safely descend from the escalator 10 without losing balance when the escalator 10 reverses.
- the operation control unit 45 stops the escalator 10 from running in reverse. This prevents users from accidentally entering the escalator 10 while it is running in reverse and falling.
- the elevator shaft determination unit 43 may determine whether or not there is a user in the elevator shaft 11 by, for example, photographing the entire elevator shaft 11 with the camera 20, detecting a moving object from the image, and recognizing this moving object as a user to determine whether or not there is a user in the elevator shaft 11. Another method for determining whether or not there is a user in the elevator shaft 11 may be to photograph the landing (the landing when the escalator 10 is running in reverse) with the camera 20, and determine that there is no user in the elevator shaft 11 if no user is detected from the image for a predetermined period of time.
- the elevator shaft determination unit 43 can determine the body orientation of a user in the elevator shaft 11, for example, by recognizing the user's face through machine learning and determining the body orientation from the face orientation. Another method is to recognize the user's posture through machine learning and determine the body orientation from the user's posture. In this embodiment, the image captured by the camera 20 is used to determine the body orientation of a user in the elevator shaft 11, but other methods may also be used to determine the body orientation.
- the platform determination unit 44 analyzes the image of the platform captured by the camera 20 and determines whether or not there are passengers at the platform. When the operation of the escalator 10 stops due to congestion at the landing, and the platform determination unit 44 determines that there are no passengers at the platform, the operation control unit 45 reverses the escalator 10. This makes it possible to avoid collisions between passengers already on the escalator 10 and passengers near the platform.
- the platform determination unit 44 may determine the presence or absence of users at the platform by, for example, detecting a moving object from a captured image, recognizing the moving object as a person, and determining the presence or absence of users. Note that in this embodiment, the image from the camera 20 is used to determine the presence or absence of congestion at the disembarking platform, but other methods may also be used to determine congestion. For example, LiDAR or millimeter wave radar may be used to determine the presence or absence of users at the platform.
- control device 40 includes the function of the determination unit 41, but the determination unit 41 may be provided independently from the control device 40.
- the detection unit 20 may be provided with the function of the determination unit 41, and the determination result of the determination unit 41 may be transmitted to the control device 40.
- the determination unit 41 may transmit the determination result to a monitoring center in the building in which the escalator 10 is installed or in a remote location. Then, a monitor stationed at the monitoring center may check the accuracy of the determination result of the determination unit 41 based on the images captured by the camera 20. The determination unit 41 may also transmit only a portion of the determination result to the monitoring center. For example, only the determination result of the disembarkation determination unit 42 may be transmitted to the monitoring center.
- the operation control unit 45 adjusts the speed of the escalator 10, stops the operation, and controls the direction of operation by transmitting commands to the drive unit 14. When stopping the operation of the escalator 10, it is preferable for the operation control unit 45 to stop the escalator 10 after gradually slowing down the speed of the escalator 10. By gradually slowing down the speed of the escalator 10, it is possible to prevent users riding on the escalator 10 from falling or colliding with each other.
- the operation control unit 45 may also have a function of transmitting the current direction and speed of operation of the escalator 10 to the determination unit 41 and the speaker control unit 46.
- the speaker control unit 46 controls the audio output of the speakers 30.
- the speaker control unit 46 may output announcement content previously stored in the speaker control unit 46, or may output audio within the building in which the escalator 10 is installed or within a remote monitoring center.
- the speaker control unit 46 may output audio from all speakers 30, or may output audio from only some of the speakers 30.
- the speaker control unit 46 selects the elevator speakers 30C, 30D, and 30E provided on the balustrade 12. Then, the speaker control unit 46 outputs a message from the elevator speakers 30C, 30D, and 30E saying, "The escalator is reversing. Please face the landing side.” This allows users on the escalator 10 to safely get off the escalator 10 without losing their balance when the escalator 10 reverses.
- the speaker control unit 46 selects the lower speaker 30A or the upper speaker 30B provided at the platform. Then, the speaker control unit 46 outputs a message saying "The escalator will reverse. Please move away from the platform” from the lower speaker 30A or the upper speaker 30B. This makes it possible to prevent collisions between users on the escalator 10 and users near the platform.
- guidance is given to users of the escalator 10 using the speaker 30, but other guidance devices may also be used.
- a display device may be provided that displays a message encouraging users to turn around, or a message indicating that entry to the platform is prohibited.
- a Patrol Light registered trademark
- Figure 3 is a flow chart showing the operation of the operation control system 1 from the occurrence of congestion at the landing area to the stopping of the escalator 10 moving in the reverse direction, and shows the processing operation of the control device 40.
- the escalator 10 is descending from an upper floor to a lower floor.
- the upper boarding/alighting entrance 13B is the boarding area
- the lower boarding/alighting entrance 13A is the alighting area.
- the camera 20 continuously photographs the alighting area and transmits the photographed images to the control device 40 in real time.
- the alighting area determination unit 42 receives the image from the camera 20 (step S11), it analyzes the image and determines whether or not congestion is occurring at the alighting area (step S12).
- step S12 determines that congestion is occurring at the disembarking area (step S12: Yes)
- the operation control unit 45 gradually slows down the operating speed of the escalator 10 (step S13). Then, after the operating speed of the escalator 10 has sufficiently slowed down, the operation control unit 45 stops the operation of the escalator 10 (step S14). Also, if the disembarking determination unit 42 determines that congestion is not occurring at the disembarking area (step S12: No), the disembarking determination unit 42 continues to monitor the disembarking area.
- the speaker control unit 46 selects the upper speaker 30B installed at the platform and outputs audio to users around the platform to guide them away from the platform (step S15).
- the platform determination unit 44 then receives images from the camera 20 (step S16) and determines whether or not there are users at the platform (step S17).
- step S17: Yes the speaker control unit 46 selects the elevator shaft speakers 30C, 30D, and 30E provided on the balustrade 12, and outputs audio to users in the elevator shaft 11 to guide them to face the platform (step S18). If the platform determination unit 44 determines that there is a user at the platform (step S17: No), the process returns to step S15, and the speaker control unit 46 again outputs audio to users near the platform to guide them away from the platform.
- the elevator determination unit 43 receives an image from the camera 20 (step S19) and determines whether the body of the user in the elevator 11 is facing the landing side (step S20).
- step S20: Yes if the elevator shaft determination unit 43 determines that the user in the elevator shaft 11 is facing the landing side (step S20: Yes), the operation control unit 45 causes the escalator 10 to move in the opposite direction to the initial direction of travel, that is, from the lower floor to the upper floor (step S21). Also, if the elevator shaft determination unit 43 determines that the user is not facing the landing side (step S20: No), the process returns to step S18, and audio is output again to the user in the elevator shaft 11 to guide them to face the landing side.
- the elevator shaft determination unit 43 receives images from the camera 20 (step S22) and determines whether or not a user is present in the elevator shaft 11 (step S23).
- step S23: Yes If the elevator shaft determination unit 43 determines that there is no user in the elevator shaft 11 (step S23: Yes), the operation control unit 45 stops the escalator 10 from running in the reverse direction (step S24). If the elevator shaft determination unit 43 determines that there is a user in the elevator shaft 11 (step S23: No), the process returns to step S22, and the operation control unit 45 causes the escalator 10 to continue running in the reverse direction.
- the operation control unit 45 when the disembarking determination unit 42 determines that congestion is occurring at the disembarking area, the operation control unit 45 gradually slows down the operating speed of the escalator 10, but the result of the determination by the disembarking determination unit 42 may be transmitted to a monitoring center in the building in which the escalator 10 is installed or in a remote location. Then, if a monitor stationed at the monitoring center checks the images captured by the camera 20 and determines that congestion is occurring at the disembarking area, the operation control unit 45 may gradually slow down the operating speed of the escalator 10. This makes it possible to prevent the operation of the escalator 10 from being stopped due to a false detection by the disembarking determination unit 42.
- the disembarking determination unit 42 determines whether or not congestion is occurring at the disembarking station only before the operating speed of the escalator 10 is decelerated, but the disembarking determination unit 42 may determine whether or not congestion is occurring at the disembarking station while the operating speed of the escalator 10 is being decelerated, or after the operation of the escalator 10 has stopped. Then, when the disembarking determination unit 42 determines that congestion at the disembarking station has been resolved, the operation control unit 45 may return the escalator 10 to its original operating speed. This allows the operation of the escalator 10 to be smoothly resumed when congestion at the disembarking station is resolved.
- the determination unit 41 does not make a determination while the escalator 10 is running in reverse, but the determination unit 41 may make a determination while the escalator 10 is running in reverse.
- the platform determination unit 44 may determine whether a user has entered the escalator 10 while the escalator 10 is running in reverse. If a user has entered, the operation control unit 45 may slow down the operation speed of the escalator 10 or stop the operation of the escalator 10.
- the elevator determination unit 43 may determine the direction of the body of a user in the elevator 11 while the escalator 10 is running in reverse.
- the speaker control unit 46 may output a sound to the user in the elevator 11 to guide him/her to face the landing side (the landing side when the escalator 10 is running in reverse).
Landscapes
- Escalators And Moving Walkways (AREA)
Abstract
降場で滞留が発生した場合に利用者が安全に乗車コンベアから降りることができる乗客コンベアの運行制御システムを提供する。運行制御システムは、乗客コンベアの利用者を検知する検知部(20)と、乗客コンベアの利用者に向けて音声を出力するスピーカ(30)と、乗客コンベアの運転を制御すると共に、スピーカ(30)の音声出力を制御する制御装置(40)を備え、制御装置(40)は、所定の方向に運行しているときに、検知部(20)からの情報に基づいて乗客コンベアの降場における利用者の滞留を判定し、滞留していると判定した場合には、乗客コンベアの運行を停止させ、スピーカ(30)から利用者に向けて乗客コンベアの乗場側を向くように促す音声を出力させ、乗客コンベアを逆方向に運行させる。
Description
本発明は、乗客コンベアの運行制御システムに関する。
乗客コンベアにおいては、運行中の乗客コンベアから利用者が降りる際に、降場付近で人の滞留が生じている場合、利用者が誤って衝突・転倒してしまうことが懸念される。そこで、このような事故を未然に防止するために、特許文献1には、降場付近で滞留が生じた場合に、乗客コンベアの運行を停止させる安全装置を備えた乗客コンベアが開示されている。また、特許文献2には、降場付近で滞留が生じた場合に、利用者の乗客コンベアへの進入を防止する進入防止装置を備えた乗客コンベアが開示されている。
上記の通り、乗客コンベアの降場付近で人の滞留が生じた場合、利用者の衝突および転倒事故を防止することは重要な課題である。特許文献1および2に開示される方法では、すでに乗客コンベアに乗車した利用者は、降場の滞留が解消するまで乗客コンベアから降りることができない。また、すでに乗車した利用者が乗客コンベアから降りようと、乗客コンベアの進行方向と逆向きに歩行すると、利用者同士の衝突および転倒の危険がある。
本発明に係る乗客コンベアの運行制御システムは、乗客コンベアの利用者を検知する検知部と、乗客コンベアの利用者に向けて音声を出力するスピーカと、乗客コンベアの運転を制御すると共に、前記スピーカの音声出力を制御する制御装置とを備え、制御装置は、所定の方向に運行しているときに、検知部からの情報に基づいて乗客コンベアの降場における利用者の滞留を判定し、滞留していると判定した場合には、乗客コンベアの運行を停止させ、スピーカから利用者に向けて乗客コンベアの乗場側を向くように促す音声を出力させ、乗客コンベアを逆方向に運行させる。
本発明に係る乗客コンベアの運行制御システムによれば、降場付近で滞留が生じた際、降場での利用者同士の衝突および転倒を防止しつつ、すでに乗車した利用者が、安全に乗客コンベアから降りることができる。
以下、本発明の実施形態として、乗客コンベアの一形態であるエスカレータの運行制御システムについて説明する。なお、本実施形態では、乗客コンベアとしてエスカレータを想定しているが、これに限定されない。乗客コンベアは、例えば、動く歩道であってもよい。また、本実施形態のエスカレータは、デパートまたはショッピングモールのような商業施設に設置されることを想定しているが、これに限定されない。エスカレータは、例えば、駅またはオフィスビルに設置されてもよい。
本実施形態の運行制御システム1は、図1に示すように、エスカレータ10と、エスカレータ10の利用者を検知する検知部20と、エスカレータ10の利用者に向けて音声を出力するスピーカ30とを備える。更に、運行制御システム1は制御装置40を備える。制御装置40は、エスカレータ10の運行速度および運行方向の制御、並びにスピーカ30の音声出力の制御を行う。また、制御装置40は、検知部20からの情報に基づき、降場で滞留が発生しているか否か等の判定を行う。
運行制御システム1は、降場で滞留が生じた際に、エスカレータ10の運行を停止させ、エスカレータ10の利用者の安全等を確保した後、エスカレータ10を逆方向に運行させるシステムである。これにより、降場で利用者の滞留が生じた際、降場での利用者同士の衝突および転倒を防止しつつ、すでに乗車した利用者が、安全にエスカレータ10から降りることができる。降場での滞留が生じているか否かの判定、およびエスカレータ10の利用者の安全が確保されているか否かの判定は、制御装置40が検知部20からの情報に基づいて行う。
エスカレータ10は、利用者を搬送するための走行を行うものであり、建物の上部階または下部階に移動する階段状の昇降路11を含む。昇降路11は、無端状に連結され、循環移動して利用者を載置する複数のステップ(図示なし)と、これら複数のステップの両端側に立設された欄干12を含む。昇降路11の両端部には、乗降口13が設けられる。
乗降口13は、下部階に設けられる下部乗降口13Aと、上部階に設けられる上部乗降口13Bとを含む。なお、エスカレータ10が下部階から上部階へ運行している場合は、下部乗降口13Aが乗場となり、上部乗降口13Bが降場となる。また、エスカレータ10が上部階から下部階へ運行している場合は、上部乗降口13Bが乗場となり、下部乗降口13Aが降場となる。
エスカレータ10は、エスカレータ10を駆動させる駆動装置14を有する。駆動装置14は、電動機、減速機および電磁ブレーキ等で構成され、例えば、上部乗降口13Bの下に設置される。
検知部20は、エスカレータ10の利用者を検知するものである。検知部20には、例えば、カメラ、LiDAR(Light Detection and Ranging)、またはミリ波レーダを用いることができる。検知部20は1つの機器のみを用いてもよいし、複数の機器を用いてもよい。例えば、カメラとLiDARを併用してもよい。複数の機器を併用することで、利用者の検知の精度を高めることができる。また、検知部20は複数の場所に設置してもよい。例えば、エスカレータ10の昇降路11、下部乗降口13A、および上部乗降口13Bの上部にそれぞれ設置してもよい。複数の場所に検知部20を設置することで、利用者の検知の精度を高めることができる。なお、昇降路11にいる利用者の体の向きを正確に判定する観点から、昇降路11の利用者を検知する検知部20は、カメラを含むことが好ましい。
本実施形態では、検知部20として、1台のカメラ20を用いている。カメラ20は小型の監視用カメラであり、CCDイメージセンサまたはCMOSイメージセンサ等の撮像素子を有する。カメラ20は昇降路11の中央付近の上部に設置され、エスカレータ10の昇降路11、下部乗降口13A、および上部乗降口13Bを撮影している。カメラ20はエスカレータ10の利用者を常時撮影し、その画像を制御装置40にリアルタイムで送信する。
スピーカ30は、エスカレータ10の利用者に向けて音声を出力する装置である。スピーカ30は、制御装置40から送信される信号を音声メッセージに変換する機能を有する。また、スピーカ30には電気信号を増幅させるアンプが設けられていてもよい。
本実施形態では、スピーカ30として、下部スピーカ30Aが下部乗降口13Aの下部に設置され、上部スピーカ30Bが上部乗降口13Bの下部に設置されている。また、昇降路スピーカ30C、30D、および30Eが左右の欄干12の一方に設置されている。以下、単にスピーカ30と記載した場合には、下部スピーカ30A、上部スピーカ30B、および昇降路スピーカ30C,30D,30Eのすべてを含む。
制御装置40は、エスカレータ10の運行速度および運行方向の制御、並びにスピーカ30の音声出力の制御を行う。具体的には、制御装置40はエスカレータ10が所定の方向に運行しているときに、降場で滞留が発生するとエスカレータ10の運行を停止させる。そして、制御装置40はスピーカ30から利用者に向けてエスカレータ10の乗場側を向くように促す音声を出力させた後に、エスカレータ10を逆方向に運行させる。制御装置40には、システムの制御を実行する演算処理装置としてのCPUと、CPUに接続される記憶装置としてのROM、RAM、ハードディスクドライブ(HDD)と、情報の送受信を行う通信装置とが搭載される。本実施形態では、制御装置40は、上部乗降口13Bの下部に設置されているが、設置場所はこれに限定されない。制御装置40は、例えば、エスカレータ10が設置する建物内または遠隔地の監視センタ内に設置されていてもよい。
図2を用いて、制御装置40の機能構成について説明する。図2は、制御装置40の機能構成を示すブロック図である。
制御装置40は、検知部としてのカメラ20、スピーカ30、および駆動装置14に接続されている。制御装置40は、カメラ20で撮影された画像を取得、解析し、滞留等の判定を行う判定部41と、エスカレータ10の運行速度や運行方向の制御を行う運行制御部45と、スピーカ30の音声出力の制御を行うスピーカ制御部46とを含む。
判定部41は、カメラ20によって撮影された画像の解析を行う。判定部41は、降場での利用者の滞留を判定する降場判定部42と、昇降路11での利用者の有無および体の向きを判定する昇降路判定部43と、乗場での利用者の有無を判定する乗場判定部44とを含む。
降場判定部42は、カメラ20によって撮影された降場の画像をリアルタイムで解析し、降場での利用者の滞留の有無を判定する。降場判定部42が降場で滞留が発生していると判定すると、運行制御部45はエスカレータ10を停止させる。これにより、降場付近での利用者同士の衝突を回避することができる。
降場判定部42が降場での滞留を判定する方法として、例えば、撮影した画像から動体を検出して、この動体を利用者と認識し、認識した人数が所定の数を超えた場合、または同一人物が所定の時間を超えて滞在している場合に、滞留が発生していると判定する方法がある。また、機械学習によって利用者の人数を算出し、降場での滞留の有無を判定してもよい。本実施形態では、カメラ20によって撮影された画像を用いて降場の滞留の有無を判定したが、その他の手法を用いて滞留を判定してもよい。例えば、LiDARまたはミリ波レーダを用いて、降場に滞在している人数を算出し、降場での滞留の有無を判定してもよい。
昇降路判定部43は、カメラ20によって撮影された昇降路11にいる利用者の画像を解析し、昇降路11の利用者の有無および利用者の体の向きを判定する。降場での滞留発生に伴いエスカレータ10の運行が停止した際に、昇降路判定部43が、昇降路11にいる利用者が乗場側を向いたことを判定すると、運行制御部45はエスカレータ10を逆走させる。これにより、利用者はエスカレータ10の逆走時にバランスを崩すことなく、安全にエスカレータ10から降りることができる。また、エスカレータ10が逆走している際に、昇降路判定部43が昇降路11に利用者がいない、つまり、全ての利用者がエスカレータ10から降りたことを判定すると、運行制御部45はエスカレータ10の逆走を停止させる。これにより、逆走中のエスカレータ10に誤って利用者が進入し、転倒することを防止できる。
昇降路判定部43が昇降路11の利用者の有無を判定する方法として、例えば、昇降路11全体をカメラ20で撮影し、画像から動体を検出し、この動体を利用者と認識することで、昇降路11の利用者の有無を判定する方法がある。また、昇降路11の利用者の有無を判定する方法として、例えば、乗場(エスカレータ10逆走時の降場)をカメラ20で撮影し、所定の時間の間、画像から利用者が検出されない場合に昇降路11に利用者がいないと判定する方法がある。
昇降路判定部43が昇降路11にいる利用者の体の向きを判定する方法として、例えば、機械学習によって利用者の顔を認識し、顔の向きから体の向きを判定する方法がある。また、例えば、機械学習によって利用者の姿勢を認識し、利用者の姿勢から体の向きを判定する方法がある。本実施形態では、カメラ20によって撮影された画像を用いて昇降路11にいる利用者の体の向きを判定したが、その他の手法を用いて体の向きを判定してもよい。
乗場判定部44は、カメラ20によって撮影された乗場の画像を解析し、乗場での利用者の有無を判定する。降場での滞留発生に伴いエスカレータ10の運行が停止した際に、乗場判定部44が、乗場に利用者がいないことを判定すると、運行制御部45はエスカレータ10を逆走させる。これにより、すでにエスカレータ10に乗車している利用者と乗場付近の利用者との衝突を回避することができる。
乗場判定部44が乗場の利用者の有無を判定する方法として、例えば、撮影した画像から動体を検出して、この動体を人と認識し、利用者の有無を判定する方法がある。なお、本実施形態では、カメラ20の画像を用いて降場の滞留の有無を判定したが、その他の手法を用いて滞留を判定してもよい。例えば、LiDARまたはミリ波レーダを用いて、乗場での利用者の有無を判定してもよい。
本実施形態においては、制御装置40は判定部41の機能を含んでいるが、制御装置40から判定部41は独立して設けてもよい。例えば、検知部20に判定部41の機能を設け、判定部41の判定結果を制御装置40へ送信してもよい。
判定部41は、判定結果をエスカレータ10が設置する建物内または遠隔地の監視センタへ送信してもよい。そして、監視センタに常駐する監視員が、カメラ20が撮影する画像をもとに判定部41の判定結果の正確性を確認してもよい。また、判定部41は一部の判定結果のみを監視センタに送信してもよい。例えば、降場判定部42の判定結果のみを監視センタに送信してもよい。
運行制御部45は、駆動装置14に指令を伝えることで、エスカレータ10の運行速度の調整、運行の停止および運行方向の制御を行う。運行制御部45は、エスカレータ10の運行を停止させる際、エスカレータ10の運行速度を段階的に減速させた後に、エスカレータ10を停止させることが好ましい。エスカレータ10の運行速度を段階的に減速させることで、エスカレータ10に乗車中の利用者の転倒・衝突を回避することができる。また、運行制御部45は、判定部41およびスピーカ制御部46に現在のエスカレータ10の運行方向および運行速度を送信する機能を備えていてもよい。
スピーカ制御部46は、スピーカ30の音声出力の制御を行う。スピーカ制御部46は、あらかじめスピーカ制御部46に記憶されたアナウンス内容を出力させてもよいし、エスカレータ10が設置する建物内または遠隔地の監視センタ内の音声を出力させてもよい。スピーカ制御部46は、全てのスピーカ30から音声を出力させてもよいし、一部のスピーカ30からのみ音声を出力させてもよい。
スピーカ制御部46は、例えば、昇降路11にいる利用者に乗場側を向くよう誘導する場合、欄干12に設けられている昇降路スピーカ30C,30D,30Eを選択する。そして、スピーカ制御部46は、「エスカレータが逆走します。乗場側を向いてください」というメッセージを昇降路スピーカ30C,30D,30Eから出力させる。これにより、エスカレータ10に乗車中の利用者は、エスカレータ10の逆走時にバランスを崩すことなく安全にエスカレータ10から降りることができる。
スピーカ制御部46は、例えば、エスカレータ10を逆方向に運行させる際に、乗場判定部44が乗場に人がいると判定した場合、乗場に設けられている下部スピーカ30Aまたは上部スピーカ30Bを選択する。そして、スピーカ制御部46は、「エスカレータが逆走します。乗場から離れてください」というメッセージを下部スピーカ30Aまたは上部スピーカ30Bから出力させる。これにより、エスカレータ10に乗車中の利用者と乗場付近の利用者との衝突を防止することができる。
本実施形態では、エスカレータ10の利用者に向けて、スピーカ30を用いて誘導を行っているが、その他の誘導機器を用いて誘導を行ってもよい。例えば、利用者に向けて体の向きを変えるよう促すメッセージ、または乗場への進入禁止を示すメッセージを表示する表示装置を設けてもよい。また、例えば、降場で滞留が発生していることを示すパトライト(登録商標)を設けてもよい。
図3を用いて、本実施形態における運行制御システム1の動作について説明する。図3は、降場における滞留の発生から、エスカレータ10の逆方向への運行を停止させるまでの運行制御システム1の動作を示すフローチャートであり、制御装置40の処理動作が示されている。
エスカレータ10が上部階から下部階に向かって下降中である場合を想定する。この場合、上部乗降口13Bが乗場、下部乗降口13Aが降場となる。エスカレータ10の運行中、カメラ20は降場を連続的に撮影し、リアルタイムで制御装置40に撮影した画像を送信する。降場判定部42はカメラ20の画像を受信すると(ステップS11)、当該画像を解析し、降場での滞留が発生しているか否かを判定する(ステップS12)。
ここで、降場判定部42が降場で滞留が発生していると判定すると(ステップS12:Yes)、運行制御部45はエスカレータ10の運行速度を段階的に減速させる(ステップS13)。そして、エスカレータ10の運行速度が十分減速した後に、運行制御部45はエスカレータ10の運行を停止させる(ステップS14)。また、降場判定部42が降場で滞留が発生していないと判定すると(ステップS12:No)、降場判定部42は降場の監視を継続する。
エスカレータ10の運行停止後、スピーカ制御部46は乗場に設けられている上部スピーカ30Bを選択し、乗場周辺の利用者に対し、乗場から離れるよう誘導する音声を出力させる(ステップS15)。そして、乗場判定部44が、カメラ20の画像を受信し(ステップS16)、乗場に利用者がいるか否かを判定する(ステップS17)。
ここで、乗場判定部44が乗場に利用者がいないと判定すると(ステップS17:Yes)、スピーカ制御部46は、欄干12に設けられている昇降路スピーカ30C,30D,30Eを選択し、昇降路11にいる利用者に向けて乗場側を向くよう誘導する音声を出力させる(ステップS18)。また、乗場判定部44が乗場に利用者がいると判定すると(ステップS17:No)、ステップS15に戻り、スピーカ制御部46は再度乗場付近の利用者に向けて乗場から離れるよう誘導する音声を出力させる。
昇降路11にいる利用者に向けて乗場側を向くよう誘導する音声を出力させると(ステップS18)、昇降路判定部43が、カメラ20の画像を受信し(ステップS19)、昇降路11にいる利用者の体の向きが、乗場側を向いているか否かを判定する(ステップS20)。
ここで、昇降路判定部43が昇降路11にいる利用者が乗場側を向いていると判定すると(ステップS20:Yes)、運行制御部45はエスカレータ10を当初の進行方向とは逆向き、つまり、下部階から上部階に向かってエスカレータ10を逆走させる(ステップS21)。また、昇降路判定部43が、利用者が乗場側を向いていないと判定すると(ステップS20:No)、ステップS18に戻り、再度昇降路11にいる利用者に向けて乗場側を向くよう誘導する音声を出力させる。
このようにしてエスカレータ10が下部階から上部階に向かって逆走されると、昇降路判定部43は、カメラ20の画像を受信し(ステップS22)、昇降路11に利用者がいるか否かの判定する(ステップS23)。
ここで、昇降路判定部43が昇降路11に利用者がいないと判定すると(ステップS23:Yes)、運行制御部45はエスカレータ10の逆走を停止させる(ステップS24)。また、昇降路判定部43が昇降路11に利用者がいると判定すると(ステップS23:No)、ステップS22に戻り、運行制御部45は、エスカレータ10の逆走を継続させる。
本実施形態においては、降場判定部42が降場で滞留が発生していると判定すると、運行制御部45によりエスカレータ10の運行速度を段階的に減速させているが、降場判定部42の判定結果をエスカレータ10が設置する建物内または遠隔地の監視センタへ送信してもよい。そして、監視センタに常駐する監視員がカメラ20の撮影画像を確認し、降場で滞留していると判断した場合に、運行制御部45はエスカレータ10の運行速度を段階的に減速させてもよい。これにより、降場判定部42の誤検知により、エスカレータ10の運行が停止することを防止できる。
また、本実施形態においては、降場判定部42による降場で滞留が発生しているか否かの判定は、エスカレータ10の運行速度を減速する前にのみ行っているが、エスカレータ10の運行速度を減速している途中、またはエスカレータ10の運行停止後に、降場判定部42により降場での滞留の有無を判定してもよい。そして、降場判定部42が降場での滞留が解消していると判定した場合には、運行制御部45はエスカレータ10をもとの運行速度に戻してもよい。これにより、降場での滞留が解消された場合に、スムーズにエスカレータ10の運行を再開できる。
また、本実施形態においては、エスカレータ10の逆走中、判定部41により判定を行っていないが、エスカレータ10の逆走中に判定部41により判定を行ってもよい。例えば、エスカレータ10の逆走中に、乗場判定部44によりエスカレータ10への利用者の進入の有無を判定してもよい。利用者の進入があった場合、運行制御部45は、エスカレータ10の運行速度を減速させる、またはエスカレータ10の運行を停止させてもよい。また、例えば、エスカレータ10の逆走中に、昇降路判定部43により昇降路11にいる利用者の体の向きを判定してもよい。昇降路11にいる利用者が降場側(エスカレータ10逆走時の乗場側)を向いている場合、スピーカ制御部46は、昇降路11にいる利用者に向けて乗場側(エスカレータ10逆走時の降場側)を向くよう誘導する音声を出力させてもよい。
なお、本発明は上述した実施形態およびその他の変形例に限定されるものではなく、本願の特許請求の範囲に記載された事項の範囲内において種々の変更や改良が可能であることは勿論である。
1 運行制御システム、10 エスカレータ、11 昇降路、12 欄干、13 乗降口、13A 下部乗降口、13B 上部乗降口、14 駆動装置、20 検知部(カメラ)、30 スピーカ、40 制御装置、41 判定部、42 降場判定部、43 昇降路判定部、44 乗場判定部、45 運行制御部、46 スピーカ制御部
Claims (4)
- 乗客コンベアの運行制御システムであって、
前記乗客コンベアの利用者を検知する検知部と、
前記乗客コンベアの利用者に向けて音声を出力するスピーカと、
前記乗客コンベアの運転を制御すると共に、前記スピーカの音声出力を制御する制御装置と、
を備え、
前記制御装置は、所定の方向に運行しているときに、前記検知部からの情報に基づいて前記乗客コンベアの降場における利用者の滞留を判定し、滞留していると判定した場合には、前記乗客コンベアの運行を停止させ、前記スピーカから利用者に向けて前記乗客コンベアの乗場側を向くように促す音声を出力させ、前記乗客コンベアを逆方向に運行させる、運行制御システム。 - 前記制御装置は、前記検知部からの情報に基づいて前記乗場と前記降場との間の昇降路における利用者の体の向きを判定し、利用者が前記乗場側を向いていると判定した場合には、前記乗客コンベアを逆方向に運行させる、請求項1に記載の運行制御システム。
- 前記制御装置は、前記検知部からの情報に基づいて前記乗場における利用者の有無を判定し、前記乗場に利用者がいないと判定した場合には、前記乗客コンベアを逆方向に運行させる、請求項1又は2に記載の運行制御システム。
- 前記制御装置は、前記検知部からの情報に基づいて前記降場における利用者の滞留を判定し、滞留していると判定した場合には、前記スピーカから利用者に向けて前記乗場から離れるように促す音声を出力させる、請求項1又は2に記載の運行制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/039481 WO2024089733A1 (ja) | 2022-10-24 | 2022-10-24 | 乗客コンベアの運行制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/039481 WO2024089733A1 (ja) | 2022-10-24 | 2022-10-24 | 乗客コンベアの運行制御システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024089733A1 true WO2024089733A1 (ja) | 2024-05-02 |
Family
ID=90830306
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/039481 WO2024089733A1 (ja) | 2022-10-24 | 2022-10-24 | 乗客コンベアの運行制御システム |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2024089733A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007254052A (ja) * | 2006-03-20 | 2007-10-04 | Toshiba Elevator Co Ltd | エスカレータシステムの制御装置および運転方法 |
| JP2010006487A (ja) * | 2008-06-24 | 2010-01-14 | Mitsubishi Electric Corp | エスカレータ装置 |
| WO2013092373A1 (en) * | 2011-12-19 | 2013-06-27 | Inventio Ag | Informing passengers of person-conveying device operation |
| CN113743211A (zh) * | 2021-08-02 | 2021-12-03 | 日立楼宇技术(广州)有限公司 | 一种扶梯视频监控系统、方法、装置及存储介质 |
-
2022
- 2022-10-24 WO PCT/JP2022/039481 patent/WO2024089733A1/ja unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007254052A (ja) * | 2006-03-20 | 2007-10-04 | Toshiba Elevator Co Ltd | エスカレータシステムの制御装置および運転方法 |
| JP2010006487A (ja) * | 2008-06-24 | 2010-01-14 | Mitsubishi Electric Corp | エスカレータ装置 |
| WO2013092373A1 (en) * | 2011-12-19 | 2013-06-27 | Inventio Ag | Informing passengers of person-conveying device operation |
| CN113743211A (zh) * | 2021-08-02 | 2021-12-03 | 日立楼宇技术(广州)有限公司 | 一种扶梯视频监控系统、方法、装置及存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110775752B (zh) | 检测视力受损、怀孕或残疾电梯乘客的自动方法 | |
| JP6271698B1 (ja) | 乗客コンベアシステム | |
| KR20080056251A (ko) | 엘리베이터의 피난 지원 장치 | |
| KR101622825B1 (ko) | 무게감지센서 및 변속수단을 구비한 에스컬레이터의 안전운행시스템 | |
| JP2015044674A (ja) | エレベータ用案内システム | |
| JP5788265B2 (ja) | エレベータシステムおよびその乗場呼び登録制御方法 | |
| JP2011190070A (ja) | エレベータ制御システムおよびエレベータ制御方法 | |
| KR101219407B1 (ko) | 영상처리기술을 이용한 에스컬레이터 모니터링 시스템 | |
| JP2011136824A (ja) | エレベータシステムおよびその制御方法 | |
| WO2024089733A1 (ja) | 乗客コンベアの運行制御システム | |
| JP2004244183A (ja) | エスカレータ装置 | |
| JP7136164B2 (ja) | 乗客コンベア | |
| JP2017171467A (ja) | エスカレーター及びエスカレーターの歩行・走行抑止装置 | |
| CN109368473B (zh) | 自动扶梯入口处扶手带防拽爬安全防护装置及其使用方法 | |
| JP5073620B2 (ja) | エスカレータの運転制御装置 | |
| JP6187285B2 (ja) | 乗客コンベアの自動速度切換装置 | |
| KR102074802B1 (ko) | 지능형 영상분석을 이용한 에스컬레이터 관리시스템 | |
| JP2009280356A (ja) | 乗客コンベアの制御装置 | |
| JP5575583B2 (ja) | エスカレータ | |
| JPH1160132A (ja) | マンコンベアの安全装置 | |
| JP7249524B2 (ja) | エレベータの音案内装置 | |
| JP7309970B1 (ja) | 乗客コンベアシステム、及び乗客コンベア | |
| JP2021095287A (ja) | 乗客コンベアシステム、乗客コンベアシステム用の携帯端末 | |
| JP7550047B2 (ja) | 情報処理装置 | |
| JP2021084752A (ja) | 乗客コンベアのアナウンスシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22963385 Country of ref document: EP Kind code of ref document: A1 |