JP7486984B2 - 基板処理装置、および、基板処理方法 - Google Patents
基板処理装置、および、基板処理方法 Download PDFInfo
- Publication number
- JP7486984B2 JP7486984B2 JP2020038765A JP2020038765A JP7486984B2 JP 7486984 B2 JP7486984 B2 JP 7486984B2 JP 2020038765 A JP2020038765 A JP 2020038765A JP 2020038765 A JP2020038765 A JP 2020038765A JP 7486984 B2 JP7486984 B2 JP 7486984B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- movement amount
- wobble
- processing
- processing liquid
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000758 substrate Substances 0.000 title claims description 309
- 238000012545 processing Methods 0.000 title claims description 218
- 238000003672 processing method Methods 0.000 title description 6
- 239000007788 liquid Substances 0.000 claims description 202
- 239000002131 composite material Substances 0.000 claims description 32
- 230000003287 optical effect Effects 0.000 claims description 20
- 238000000034 method Methods 0.000 claims description 15
- 238000005259 measurement Methods 0.000 claims description 11
- 238000007599 discharging Methods 0.000 claims description 5
- 239000007789 gas Substances 0.000 description 36
- 239000000126 substance Substances 0.000 description 36
- 230000002093 peripheral effect Effects 0.000 description 31
- 239000011261 inert gas Substances 0.000 description 27
- 239000000243 solution Substances 0.000 description 14
- 239000002585 base Substances 0.000 description 13
- 230000008569 process Effects 0.000 description 10
- 230000008859 change Effects 0.000 description 9
- 238000010586 diagram Methods 0.000 description 9
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 9
- KRHYYFGTRYWZRS-UHFFFAOYSA-N Fluorane Chemical compound F KRHYYFGTRYWZRS-UHFFFAOYSA-N 0.000 description 8
- 230000000694 effects Effects 0.000 description 8
- 238000005516 engineering process Methods 0.000 description 8
- 230000007246 mechanism Effects 0.000 description 7
- KFZMGEQAYNKOFK-UHFFFAOYSA-N Isopropanol Chemical compound CC(C)O KFZMGEQAYNKOFK-UHFFFAOYSA-N 0.000 description 6
- 238000012993 chemical processing Methods 0.000 description 6
- 238000005192 partition Methods 0.000 description 5
- VEXZGXHMUGYJMC-UHFFFAOYSA-N Hydrochloric acid Chemical compound Cl VEXZGXHMUGYJMC-UHFFFAOYSA-N 0.000 description 4
- MHAJPDPJQMAIIY-UHFFFAOYSA-N Hydrogen peroxide Chemical compound OO MHAJPDPJQMAIIY-UHFFFAOYSA-N 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 238000001035 drying Methods 0.000 description 4
- 238000005507 spraying Methods 0.000 description 4
- WGTYBPLFGIVFAS-UHFFFAOYSA-M tetramethylammonium hydroxide Chemical compound [OH-].C[N+](C)(C)C WGTYBPLFGIVFAS-UHFFFAOYSA-M 0.000 description 4
- 238000012546 transfer Methods 0.000 description 4
- QTBSBXVTEAMEQO-UHFFFAOYSA-N Acetic acid Chemical compound CC(O)=O QTBSBXVTEAMEQO-UHFFFAOYSA-N 0.000 description 3
- MUBZPKHOEPUJKR-UHFFFAOYSA-N Oxalic acid Chemical compound OC(=O)C(O)=O MUBZPKHOEPUJKR-UHFFFAOYSA-N 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 3
- KRKNYBCHXYNGOX-UHFFFAOYSA-N citric acid Chemical compound OC(=O)CC(O)(C(O)=O)CC(O)=O KRKNYBCHXYNGOX-UHFFFAOYSA-N 0.000 description 3
- 238000004140 cleaning Methods 0.000 description 3
- 239000008367 deionised water Substances 0.000 description 3
- 229910021641 deionized water Inorganic materials 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- QGZKDVFQNNGYKY-UHFFFAOYSA-N Ammonia Chemical compound N QGZKDVFQNNGYKY-UHFFFAOYSA-N 0.000 description 2
- QAOWNCQODCNURD-UHFFFAOYSA-N Sulfuric acid Chemical compound OS(O)(=O)=O QAOWNCQODCNURD-UHFFFAOYSA-N 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000005401 electroluminescence Methods 0.000 description 2
- 238000005530 etching Methods 0.000 description 2
- 230000014509 gene expression Effects 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 239000003960 organic solvent Substances 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000001052 transient effect Effects 0.000 description 2
- VHUUQVKOLVNVRT-UHFFFAOYSA-N Ammonium hydroxide Chemical compound [NH4+].[OH-] VHUUQVKOLVNVRT-UHFFFAOYSA-N 0.000 description 1
- UFHFLCQGNIYNRP-UHFFFAOYSA-N Hydrogen Chemical compound [H][H] UFHFLCQGNIYNRP-UHFFFAOYSA-N 0.000 description 1
- GRYLNZFGIOXLOG-UHFFFAOYSA-N Nitric acid Chemical compound O[N+]([O-])=O GRYLNZFGIOXLOG-UHFFFAOYSA-N 0.000 description 1
- CBENFWSGALASAD-UHFFFAOYSA-N Ozone Chemical compound [O-][O+]=O CBENFWSGALASAD-UHFFFAOYSA-N 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 239000003513 alkali Substances 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 229910021529 ammonia Inorganic materials 0.000 description 1
- 235000011114 ammonium hydroxide Nutrition 0.000 description 1
- 239000007864 aqueous solution Substances 0.000 description 1
- 238000007664 blowing Methods 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- -1 etc.) Substances 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- JEGUKCSWCFPDGT-UHFFFAOYSA-N h2o hydrate Chemical compound O.O JEGUKCSWCFPDGT-UHFFFAOYSA-N 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- DKAGJZJALZXOOV-UHFFFAOYSA-N hydrate;hydrochloride Chemical compound O.Cl DKAGJZJALZXOOV-UHFFFAOYSA-N 0.000 description 1
- 239000001257 hydrogen Substances 0.000 description 1
- 229910052739 hydrogen Inorganic materials 0.000 description 1
- QOSATHPSBFQAML-UHFFFAOYSA-N hydrogen peroxide;hydrate Chemical compound O.OO QOSATHPSBFQAML-UHFFFAOYSA-N 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 239000003112 inhibitor Substances 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910017604 nitric acid Inorganic materials 0.000 description 1
- 150000007524 organic acids Chemical class 0.000 description 1
- 235000006408 oxalic acid Nutrition 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 239000012487 rinsing solution Substances 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- HBMJWWWQQXIZIP-UHFFFAOYSA-N silicon carbide Chemical compound [Si+]#[C-] HBMJWWWQQXIZIP-UHFFFAOYSA-N 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 239000004094 surface-active agent Substances 0.000 description 1
Images








Landscapes
- Weting (AREA)
- Cleaning Or Drying Semiconductors (AREA)
Description
以下、本実施の形態に関する基板処理装置、および、基板処理方法について説明する。
図1は、本実施の形態に関する基板処理装置100の内部のレイアウトを説明するための図解的な平面図である。図1に例が示されるように、基板処理装置100は、処理対象である基板Wを1枚ずつ処理する枚葉式の処理装置である。
次に、図5を参照しつつ、基板処理装置の動作について説明する。ここで、図5は、本実施の形態に関する基板処理装置100の動作の例を示すフローチャートである。
図6は、基板Wの芯ブレと処理液の着液位置45との関係の例を示す図である。図6に例が示されるように、基板Wの芯ブレに起因して、処理液の着液位置45が変化する。
本実施の形態に関する基板処理装置、および、基板処理方法について説明する。なお、以下の説明においては、以上に記載された実施の形態で説明された構成要素と同様の構成要素については同じ符号を付して図示し、その詳細な説明については適宜省略するものとする。
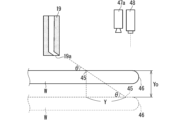
図9は、本実施の形態に関する、基板Wの芯ブレと処理液の着液位置45との関係の例を示す図である。本実施の形態においては、芯ブレ移動量と面ブレ移動量とを測定する測定部として、基板Wの主面に直交する方向の光軸を有し、かつ、基板Wの外周端46の位置を測定するラインセンサー47aと、基板Wの主面に直交する方向の光軸を有し、かつ、基板Wの主面の位置を測定する反射型センサー48とを備える。なお、反射型センサー48とは、検出対象に信号光を照射し、当該検出対象からの反射光を受光することによって、当該検出対象との間の距離などを測定するセンサーである。図9に例が示されるように、基板Wの芯ブレに起因して、処理液の着液位置45が変化する。
次に、以上に記載された実施の形態によって生じる効果の例を示す。なお、以下の説明においては、以上に記載された実施の形態に例が示された具体的な構成に基づいて当該効果が記載されるが、同様の効果が生じる範囲で、本願明細書に例が示される他の具体的な構成と置き換えられてもよい。
以上に記載された実施の形態では、ノズル移動ユニットとして、処理液ノズル19を、円弧軌跡を描きながら移動させるスキャンタイプのものが例に挙げられたが、処理液ノズル19を直線状に移動させる直動タイプのものが採用されていてもよい。
4 処理チャンバ
5 スピンチャック
6 処理液供給ユニット
8,9,10 不活性ガス供給ユニット
11 ヒーター
16 制御部
19 処理液ノズル
19a 吐出口
20 ノズルアーム
21 アーム支持軸
22 アーム揺動モータ
24 薬液配管
25 薬液バルブ
26A リンス液配管
26B リンス液バルブ
27,31,36 気体吐出ノズル
28,32,37 気体配管
29,33,38 気体バルブ
30,34 ノズル移動機構
42,43 外周領域
45 着液位置
46 外周端
47,47a ラインセンサー
48 反射型センサー
71 CPU
72 ROM
73 RAM
74 記憶部
75 バス配線
76 入力部
77 表示部
100 基板処理装置
102 インデクサロボット
103 主搬送ロボット
113 隔壁
115 排気ダクト
116 スピン軸
117 スピンベース
117a 上面
118 スピンモータ
200 処理カップ
200a 上端部
Claims (3)
- 基板を保持する基板保持部と、
前記基板保持部に保持された前記基板を回転させる回転部と、
前記基板の主面に対して傾斜する方向から処理液を吐出する処理液ノズルと、
回転する前記基板の、前記主面に沿う方向のブレを芯ブレとし、
回転する前記基板の、前記主面と交差する方向のブレを面ブレとし、
前記処理液の着液位置の、前記芯ブレに起因する移動量である芯ブレ移動量と、前記処理液の着液位置の、前記面ブレに起因する移動量である面ブレ移動量との総和である合成ブレ移動量を測定する、単一の測定部と、
前記合成ブレ移動量を低減するように、前記基板保持部における前記基板の保持位置を変更する位置変更部とを備え、
前記測定部が、前記処理液が吐出される方向に沿う光軸を有し、かつ、前記基板の外周端の位置を測定するラインセンサーであり、
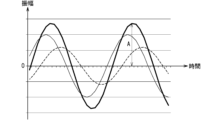
前記位置変更部が、前記基板の回転周期に合わせて周期的に変化する前記合成ブレ移動量の振幅が最大となるタイミングで、前記合成ブレ移動量の前記振幅に応じて前記基板の前記保持位置を変更する、
基板処理装置。 - 請求項1に記載の基板処理装置であり、
前記測定部は、前記処理液ノズルに取り付けられる、
基板処理装置。 - 基板を保持する工程と、
保持された前記基板を回転させる工程と、
回転する前記基板の、主面に沿う方向のブレを芯ブレとし、
回転する前記基板の、前記主面と交差する方向のブレを面ブレとし、
処理液の着液位置の、前記芯ブレに起因する移動量である芯ブレ移動量と、前記処理液の着液位置の、前記面ブレに起因する移動量である面ブレ移動量との総和である合成ブレ移動量を測定する工程と、
前記合成ブレ移動量を低減するように、前記基板の保持位置を変更する工程と、
前記基板の前記主面に対して傾斜する方向から前記処理液を吐出する工程とを備え、
前記合成ブレ移動量を測定する工程が、前記処理液が吐出される方向に沿う光軸を有し、かつ、前記基板の外周端の位置を測定する単一のラインセンサーで前記合成ブレ移動量を測定する工程であり、
前記基板の保持位置を変更する工程が、前記基板の回転周期に合わせて周期的に変化する前記合成ブレ移動量の振幅が最大となるタイミングで、前記合成ブレ移動量の前記振幅に応じて前記基板の前記保持位置を変更する工程である、
基板処理方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020038765A JP7486984B2 (ja) | 2020-03-06 | 2020-03-06 | 基板処理装置、および、基板処理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020038765A JP7486984B2 (ja) | 2020-03-06 | 2020-03-06 | 基板処理装置、および、基板処理方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021141233A JP2021141233A (ja) | 2021-09-16 |
| JP7486984B2 true JP7486984B2 (ja) | 2024-05-20 |
Family
ID=77669059
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020038765A Active JP7486984B2 (ja) | 2020-03-06 | 2020-03-06 | 基板処理装置、および、基板処理方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7486984B2 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007220952A (ja) | 2006-02-17 | 2007-08-30 | Dainippon Screen Mfg Co Ltd | 基板位置決め方法、基板位置決め装置および基板処理装置 |
| JP2010141237A (ja) | 2008-12-15 | 2010-06-24 | Tokyo Electron Ltd | 異物除去方法及び記憶媒体 |
| JP2015096830A (ja) | 2013-11-15 | 2015-05-21 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| JP2018093178A (ja) | 2016-11-29 | 2018-06-14 | 東京エレクトロン株式会社 | 基板処理装置、基板処理方法及び記憶媒体 |
| JP2018142675A (ja) | 2017-02-28 | 2018-09-13 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| JP2018182076A (ja) | 2017-04-13 | 2018-11-15 | 株式会社Screenホールディングス | 周縁処理装置および周縁処理方法 |
| JP2019149423A (ja) | 2018-02-26 | 2019-09-05 | 株式会社Screenホールディングス | センタリング装置、センタリング方法、基板処理装置、および基板処理方法 |
-
2020
- 2020-03-06 JP JP2020038765A patent/JP7486984B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007220952A (ja) | 2006-02-17 | 2007-08-30 | Dainippon Screen Mfg Co Ltd | 基板位置決め方法、基板位置決め装置および基板処理装置 |
| JP2010141237A (ja) | 2008-12-15 | 2010-06-24 | Tokyo Electron Ltd | 異物除去方法及び記憶媒体 |
| JP2015096830A (ja) | 2013-11-15 | 2015-05-21 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| JP2018093178A (ja) | 2016-11-29 | 2018-06-14 | 東京エレクトロン株式会社 | 基板処理装置、基板処理方法及び記憶媒体 |
| JP2018142675A (ja) | 2017-02-28 | 2018-09-13 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| JP2018182076A (ja) | 2017-04-13 | 2018-11-15 | 株式会社Screenホールディングス | 周縁処理装置および周縁処理方法 |
| JP2019149423A (ja) | 2018-02-26 | 2019-09-05 | 株式会社Screenホールディングス | センタリング装置、センタリング方法、基板処理装置、および基板処理方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021141233A (ja) | 2021-09-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8980013B2 (en) | Substrate cleaning method and substrate cleaning apparatus | |
| JP5012651B2 (ja) | 塗布装置、塗布方法、塗布、現像装置及び記憶媒体 | |
| US6332723B1 (en) | Substrate processing apparatus and method | |
| US20100200547A1 (en) | Liquid processing apparatus and liquid processing method | |
| US10847387B2 (en) | Substrate processing apparatus, substrate processing method and recording medium | |
| US10668591B2 (en) | Substrate cleaning device, substrate processing apparatus and substrate cleaning method | |
| US11715648B2 (en) | Substrate processing apparatus and substrate drying method | |
| US11469117B2 (en) | Substrate processing apparatus, and substrate processing method | |
| JP2013206992A (ja) | 基板洗浄装置およびそれを備えた基板処理装置 | |
| JP2007220989A (ja) | 基板処理方法、基板処理装置、その制御プログラム及びコンピュータ読取可能な記憶媒体 | |
| JP2019134073A (ja) | 基板処理方法および基板処理装置 | |
| KR101972226B1 (ko) | 기판 세정 장치 및 그것을 구비하는 기판 처리 장치 | |
| JP7486984B2 (ja) | 基板処理装置、および、基板処理方法 | |
| TW201834103A (zh) | 基板處理裝置以及基板處理方法 | |
| KR20220002532A (ko) | 기판 처리 장치, 기판 처리 방법 및 컴퓨터로 판독 가능한 기억 매체 | |
| JP2024051067A (ja) | 処理液除去方法、処理液除去装置、基板処理装置、基板処理方法 | |
| JP2011035186A (ja) | 塗布処理装置、塗布処理方法、プログラム及びコンピュータ記憶媒体 | |
| JP2022155713A (ja) | 基板乾燥装置及び基板処理装置に関する。 | |
| JP2017118049A (ja) | 基板処理装置、基板処理方法及び記憶媒体 | |
| JP2003234280A (ja) | 基板処理ユニットおよび基板処理装置 | |
| JP6949509B2 (ja) | 基板処理装置および基板処理方法 | |
| US20240361072A1 (en) | Substrate processing apparatus and substrate processing method | |
| JP7453020B2 (ja) | 基板処理方法 | |
| JP7353079B2 (ja) | 基板処理装置 | |
| WO2023248927A1 (ja) | 基板処理装置及び基板処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231030 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231121 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240116 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240423 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240508 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7486984 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |