JP5945572B2 - 駆動力制御システムおよび鞍乗り型車両 - Google Patents
駆動力制御システムおよび鞍乗り型車両 Download PDFInfo
- Publication number
- JP5945572B2 JP5945572B2 JP2014179161A JP2014179161A JP5945572B2 JP 5945572 B2 JP5945572 B2 JP 5945572B2 JP 2014179161 A JP2014179161 A JP 2014179161A JP 2014179161 A JP2014179161 A JP 2014179161A JP 5945572 B2 JP5945572 B2 JP 5945572B2
- Authority
- JP
- Japan
- Prior art keywords
- bank angle
- relative
- driving force
- absolute
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004364 calculation method Methods 0.000 claims description 46
- 230000001629 suppression Effects 0.000 claims description 35
- 230000008859 change Effects 0.000 claims description 25
- 238000001514 detection method Methods 0.000 claims description 22
- 238000004590 computer program Methods 0.000 claims description 15
- 230000001133 acceleration Effects 0.000 description 28
- 238000010586 diagram Methods 0.000 description 13
- 238000000034 method Methods 0.000 description 9
- 238000012545 processing Methods 0.000 description 7
- 230000005540 biological transmission Effects 0.000 description 6
- 230000006399 behavior Effects 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 238000002347 injection Methods 0.000 description 4
- 239000007924 injection Substances 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 239000000446 fuel Substances 0.000 description 3
- 239000002828 fuel tank Substances 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 239000002131 composite material Substances 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K31/0066—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator responsive to vehicle path curvature
- B60K31/0083—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator responsive to vehicle path curvature responsive to centrifugal force acting on vehicle due to the path it is following
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18145—Cornering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18172—Preventing, or responsive to skidding of wheels
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D11/00—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated
- F02D11/06—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance
- F02D11/10—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type
- F02D11/105—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type characterised by the function converting demand to actuation, e.g. a map indicating relations between an accelerator pedal position and throttle valve opening or target engine torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/021—Introducing corrections for particular conditions exterior to the engine
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/04—Introducing corrections for particular operating conditions
- F02D41/10—Introducing corrections for particular operating conditions for acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2300/00—Indexing codes relating to the type of vehicle
- B60W2300/36—Cycles; Motorcycles; Scooters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0657—Engine torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/18—Roll
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/26—Wheel slip
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/28—Wheel speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/30—Wheel torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0605—Throttle position
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D11/00—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated
- F02D11/06—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance
- F02D11/10—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type
- F02D11/106—Detection of demand or actuation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D11/00—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated
- F02D11/06—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance
- F02D11/10—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type
- F02D2011/101—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type characterised by the means for actuating the throttles
- F02D2011/102—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type characterised by the means for actuating the throttles at least one throttle being moved only by an electric actuator
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/50—Input parameters for engine control said parameters being related to the vehicle or its components
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/50—Input parameters for engine control said parameters being related to the vehicle or its components
- F02D2200/501—Vehicle speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/60—Input parameters for engine control said parameters being related to the driver demands or status
- F02D2200/602—Pedal position
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2250/00—Engine control related to specific problems or objectives
- F02D2250/18—Control of the engine output torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/0002—Controlling intake air
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- General Engineering & Computer Science (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Throttle Valves Provided In The Intake System Or In The Exhaust System (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Description
・前輪車速の変化量(加速度)≦所定値
・絶対バンク角≦所定値
・アクセル開度≦所定値
を全て満たしたときに許可される(図7のステップS11)。
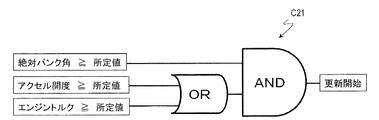
・アクセル開度≧所定値
・エンジントルク≧所定値
の少なくとも一方を見たし、且つ、
・絶対バンク角≧所定値
を満たしたときに開始される(図7のステップS12)。
・現在記憶している最大バンク角<現在の絶対バンク角
が成立すれば、現在の絶対バンク角を新しい最大絶対バンク角として記憶する(図7のステップS13およびS14)。この最大絶対バンク角の更新処理を実行したタイミングから駆動力抑制制御を開始する。なお、上述した理由から、駆動力抑制制御は、エンジントルクが正側(加速側)の領域においてのみ実行する。駆動力抑制制御では、相対バンク角θrを算出する(ステップS15)。上述したように、この相対バンク角θrに応じてアクセル−スロットル特性を変化させる。

2 メインフレーム
3 ヘッドパイプ
4 ステアリングシャフト
5 ハンドル
7 フロントフォーク
8 前輪
10 前輪ブレーキ
11 前輪カバー
13 クラッチ
15 燃料タンク
16 シート
17 エンジン
18 変速機
19 ドライブ軸
20 ドライブスプロケット
21 スイングアーム
22 ドリブンスプロケット
23 後輪
24 チェーン
26 後輪ブレーキ
31 ECU
33 ジャイロスコープ
34 加速度センサ
35 前輪車速センサ
36 後輪車速センサ
37 スロットルセンサ
38 ブレーキモジュレータ
39 点火プラグ
40 燃料噴射装置
41 スロットルアクチュエータ
42 駆動源回転速度センサ
43 アクセル開度センサ
51 絶対バンク角検出部
53 コーナー推定演算部
55 基本目標開度演算部
57 相対バンク角演算部
59 補正後目標開度演算部
91 スリップ演算部
93 基準スリップ演算部
95 抑制量演算部
Claims (12)
- 車両のバンク角の絶対値である絶対バンク角を検出する絶対バンク角検出部と、
前記絶対バンク角の最大値である最大絶対バンク角を基準とした前記車両の相対角度である相対バンク角を演算する演算部と、
前記相対バンク角に応じて駆動力を制御する制御部と、
を備え、
前記制御部は、前記相対バンク角に応じて、アクセル開度に対するスロットル開度の変化の特性であるアクセル−スロットル特性を変化させ、
前記制御部は、前記相対バンク角が小さいときは、前記相対バンク角が大きいときよりも、前記アクセル開度に対する前記スロットル開度の割合が小さいアクセル−スロットル特性に基づいて前記駆動力を制御する、駆動力制御システム。 - 前記制御部は、前記相対バンク角が大きくなるにつれて、アクセル−スロットル特性を前記アクセル開度に対する前記スロットル開度が大きい特性に変化させる、請求項1に記載の駆動力制御システム。
- 前記制御部は、前記絶対バンク角が所定値以上になったことに基づいて、前記アクセル−スロットル特性を変化させる前記駆動力の制御を開始する、請求項1または2に記載の駆動力制御システム。
- 前記制御部は、前記アクセル開度が所定値以上になったことに基づいて、前記アクセル−スロットル特性を変化させる前記駆動力の制御を開始する、請求項1から3のいずれかに記載の駆動力制御システム。
- 前記制御部は、前記車両の駆動源のトルクが所定値以上になったことに基づいて、前記アクセル−スロットル特性を変化させる前記駆動力の制御を開始する、請求項1から4のいずれかに記載の駆動力制御システム。
- 車両のバンク角の絶対値である絶対バンク角を検出する絶対バンク角検出部と、
前記絶対バンク角の最大値である最大絶対バンク角を基準とした前記車両の相対角度である相対バンク角を演算する演算部と、
前記相対バンク角に応じて駆動力を制御する制御部と、
を備え、
前記制御部は、前記相対バンク角に応じて、トラクション制御のオン/オフの閾値となるスリップ値を変更し、
前記制御部は、前記相対バンク角が小さいときは、前記相対バンク角が大きいときよりも、前記閾値となるスリップ値を小さくする、駆動力制御システム。 - 車両のバンク角の絶対値である絶対バンク角を検出する絶対バンク角検出部と、
前記絶対バンク角の最大値である最大絶対バンク角を基準とした前記車両の相対角度である相対バンク角を演算する演算部と、
前記相対バンク角に応じて駆動力を制御する制御部と、
を備え、
前記制御部は、前記相対バンク角に応じて、トラクション制御における駆動力の抑制量を変更し、
前記制御部は、前記相対バンク角が小さいときは、前記相対バンク角が大きいときよりも、前記抑制量を大きくする、駆動力制御システム。 - 前記絶対バンク角検出部は、前記車両の前輪の車輪速が減速し、アクセル開度が所定値以下で、前記絶対バンク角が所定値以下の場合に、前記最大絶対バンク角の検出を開始する、請求項1から7のいずれかに記載の駆動力制御システム。
- 請求項1から8のいずれかに記載の駆動力制御システムを備えた鞍乗り型車両。
- 鞍乗り型車両の駆動力を制御する動作をコンピュータに実行させるコンピュータプログラムであって、
前記コンピュータプログラムは、
前記鞍乗り型車両のバンク角の絶対値である絶対バンク角を検出するステップと、
前記絶対バンク角の最大値である最大絶対バンク角を基準とした前記鞍乗り型車両の相対角度である相対バンク角を演算するステップと、
前記相対バンク角に応じて駆動力を制御するステップと、
前記相対バンク角に応じて、アクセル開度に対するスロットル開度の変化の特性であるアクセル−スロットル特性を変化させるステップと、
前記相対バンク角が小さいときは、前記相対バンク角が大きいときよりも、前記アクセル開度に対する前記スロットル開度の割合が小さいアクセル−スロットル特性に基づいて前記駆動力を制御するステップと、
を前記コンピュータに実行させるコンピュータプログラム。 - 鞍乗り型車両の駆動力を制御する動作をコンピュータに実行させるコンピュータプログラムであって、
前記コンピュータプログラムは、
前記鞍乗り型車両のバンク角の絶対値である絶対バンク角を検出するステップと、
前記絶対バンク角の最大値である最大絶対バンク角を基準とした前記鞍乗り型車両の相対角度である相対バンク角を演算するステップと、
前記相対バンク角に応じて駆動力を制御するステップと、
前記相対バンク角に応じて、トラクション制御のオン/オフの閾値となるスリップ値を変更するステップと、
前記相対バンク角が小さいときは、前記相対バンク角が大きいときよりも、前記閾値となるスリップ値を小さくするステップと、
を前記コンピュータに実行させるコンピュータプログラム。 - 鞍乗り型車両の駆動力を制御する動作をコンピュータに実行させるコンピュータプログラムであって、
前記コンピュータプログラムは、
前記鞍乗り型車両のバンク角の絶対値である絶対バンク角を検出するステップと、
前記絶対バンク角の最大値である最大絶対バンク角を基準とした前記鞍乗り型車両の相対角度である相対バンク角を演算するステップと、
前記相対バンク角に応じて駆動力を制御するステップと、
前記相対バンク角に応じて、トラクション制御における駆動力の抑制量を変更するステップと、
前記相対バンク角が小さいときは、前記相対バンク角が大きいときよりも、前記抑制量を大きくするステップと、
を前記コンピュータに実行させるコンピュータプログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014179161A JP5945572B2 (ja) | 2014-09-03 | 2014-09-03 | 駆動力制御システムおよび鞍乗り型車両 |
| EP14196399.1A EP2993333B1 (en) | 2014-09-03 | 2014-12-04 | Driving force control system and saddled vehicle |
| US14/566,705 US9758041B2 (en) | 2014-09-03 | 2014-12-10 | Driving force control system and saddled vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014179161A JP5945572B2 (ja) | 2014-09-03 | 2014-09-03 | 駆動力制御システムおよび鞍乗り型車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016053324A JP2016053324A (ja) | 2016-04-14 |
| JP5945572B2 true JP5945572B2 (ja) | 2016-07-05 |
Family
ID=52103045
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014179161A Active JP5945572B2 (ja) | 2014-09-03 | 2014-09-03 | 駆動力制御システムおよび鞍乗り型車両 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9758041B2 (ja) |
| EP (1) | EP2993333B1 (ja) |
| JP (1) | JP5945572B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7171457B2 (ja) | 2019-01-25 | 2022-11-15 | 三菱重工業株式会社 | 粉塵回収装置及びそれを備えた排ガス処理装置並びに粉塵回収方法 |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013212606A1 (de) * | 2013-06-28 | 2014-12-31 | Robert Bosch Gmbh | Verfahren zur querdynamischen Stabilisierung eines einspurigen Kraftfahrzeugs |
| DE112014006719T9 (de) * | 2014-06-04 | 2017-07-06 | Kabushiki Kaisha F.C.C. | Fahrzeug mit Sattel |
| JP5945572B2 (ja) | 2014-09-03 | 2016-07-05 | ヤマハ発動機株式会社 | 駆動力制御システムおよび鞍乗り型車両 |
| DE102015202115A1 (de) * | 2015-02-06 | 2016-08-11 | Robert Bosch Gmbh | Verfahren zur Bestimmung des Schräglagenwinkels eines Zweirads |
| FR3038478B1 (fr) | 2015-07-03 | 2018-07-06 | Somfy Sas | Installation domotique et procede de constitution de la topologie d’une installation domotique |
| FR3038480B1 (fr) | 2015-07-03 | 2018-11-16 | Somfy Sas | Procede d’enregistrement d’une unite centrale de commande appartenant a une installation domotique |
| US9840239B2 (en) * | 2015-10-13 | 2017-12-12 | Robert Bosch Gmbh | Cornering brake control |
| JP2017210896A (ja) * | 2016-05-24 | 2017-11-30 | スズキ株式会社 | 過給圧制御装置 |
| DE102016211421A1 (de) * | 2016-06-27 | 2017-12-28 | Robert Bosch Gmbh | Verfahren zur querdynamischen Stabilisierung eines einspurigen Kraftfahrzeugs |
| EP3530559B1 (en) * | 2016-10-19 | 2021-07-21 | Kawasaki Jukogyo Kabushiki Kaisha | Tire force estimation device and tire force estimation method |
| JP6907555B2 (ja) * | 2017-01-24 | 2021-07-21 | スズキ株式会社 | 走行制御装置 |
| JP6907554B2 (ja) * | 2017-01-24 | 2021-07-21 | スズキ株式会社 | 走行制御装置 |
| JP6991435B2 (ja) * | 2017-04-19 | 2022-01-12 | カワサキモータース株式会社 | 縦力制御装置および縦力制御方法 |
| DE102017209165A1 (de) | 2017-05-31 | 2018-12-06 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Beeinflussung der Motorsteuerung eines einspurigen Kraftfahrzeugs |
| JP7015161B2 (ja) * | 2017-12-11 | 2022-02-02 | カワサキモータース株式会社 | リーン型乗物の走行情報蓄積方法、走行情報処理プログラム及び走行情報蓄積装置 |
| JP2020029176A (ja) * | 2018-08-23 | 2020-02-27 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 制御装置及び制御方法 |
| JP7248478B2 (ja) * | 2019-03-28 | 2023-03-29 | 本田技研工業株式会社 | 車両制御装置、端末装置、サーバ装置、車両、車両制御システム及び車両制御方法 |
| DE102020101650A1 (de) | 2020-01-24 | 2021-07-29 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zum Beeinflussen einer Schräglage eines Einspurfahrzeugs |
Family Cites Families (53)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2618250B2 (ja) * | 1987-12-22 | 1997-06-11 | 富士重工業株式会社 | トラクション制御装置 |
| DE19734112B4 (de) * | 1997-08-07 | 2007-12-27 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Antriebsschlupfregelung bei Kraftfahrzeugen |
| DE19751867A1 (de) * | 1997-11-22 | 1999-05-27 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Erkennung einer Kipptendenz eines Fahrzeuges |
| WO1999051475A1 (de) * | 1998-04-07 | 1999-10-14 | Robert Bosch Gmbh | Verfahren und vorrichtung zur stabilisierung eines fahrzeuges |
| JP3669668B2 (ja) | 1998-07-10 | 2005-07-13 | 本田技研工業株式会社 | 車両用車輪スリップ角検出装置 |
| DE19933084B4 (de) * | 1999-07-15 | 2014-01-09 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Steuerung des Schlupfes eines Fahrzeugrades |
| JP3868848B2 (ja) * | 2002-05-23 | 2007-01-17 | 三菱電機株式会社 | 車両状態検出装置 |
| DE10232362B4 (de) * | 2002-07-17 | 2018-03-15 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Stabilisierung eines einspurigen Kraftfahrzeugs |
| DE10242124B4 (de) * | 2002-09-11 | 2009-12-10 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Einstellung des Motormoments eines einspurigen Kraftfahrzeugs |
| US7006901B2 (en) * | 2002-11-18 | 2006-02-28 | Wang Everett X | Computerized automated dynamic control system for single-track vehicles |
| JP4207698B2 (ja) * | 2003-07-17 | 2009-01-14 | 株式会社アドヴィックス | 車両の横転防止装置 |
| JP2005047314A (ja) * | 2003-07-30 | 2005-02-24 | Toyota Motor Corp | スリップ判定装置およびスリップ判定方法並びに車両 |
| JP2005061376A (ja) | 2003-08-20 | 2005-03-10 | Keihin Corp | 二輪自動車の出力制御装置 |
| JP4246609B2 (ja) * | 2003-11-27 | 2009-04-02 | チコーエアーテック株式会社 | ヒューム捕集機 |
| JP4945434B2 (ja) * | 2004-03-01 | 2012-06-06 | コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフト | 傾斜傾向検出装置 |
| JP4586962B2 (ja) * | 2004-04-20 | 2010-11-24 | トヨタ自動車株式会社 | 車両の姿勢制御装置 |
| DE102004040140A1 (de) * | 2004-08-19 | 2006-02-23 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Behebung einer Umkippgefahr eines Kraftfahrzeugs |
| DE102005003981B4 (de) * | 2005-01-28 | 2012-03-29 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zur Antriebsmomentregelung bei einem einspurigen Kraftfahrzeug |
| JP2006274869A (ja) * | 2005-03-29 | 2006-10-12 | Yamaha Motor Co Ltd | 鞍乗り型輸送機器用操縦制御装置 |
| US7668637B2 (en) * | 2005-07-22 | 2010-02-23 | O'dea Kevin Austin | Technique for determining motor vehicle slip angle while accounting for road banks |
| JP4730065B2 (ja) * | 2005-11-14 | 2011-07-20 | 株式会社アドヴィックス | 車両の運動制御装置 |
| EP1998989B1 (en) | 2006-03-21 | 2015-07-01 | Koninklijke Philips N.V. | Apparatus and method for determining roll angle of a motorcycle |
| JP2008231990A (ja) | 2007-03-19 | 2008-10-02 | Yamaha Motor Co Ltd | 自動二輪車 |
| US8423274B2 (en) * | 2007-03-27 | 2013-04-16 | Equos Research Co., Ltd. | Vehicle |
| JP4879081B2 (ja) * | 2007-04-27 | 2012-02-15 | 川崎重工業株式会社 | 乗り物 |
| DE102008019194A1 (de) * | 2008-04-17 | 2009-10-22 | Wabco Gmbh | Verfahren und Vorrichtung zur Stabilitätsregelung eines Fahrzeuges, insbesondere Nutzfahrzeuges |
| EP2138367B1 (en) * | 2008-06-26 | 2015-05-13 | Kawasaki Jukogyo Kabushiki Kaisha | Slip suppression control system for vehicle |
| EP2138366B1 (en) * | 2008-06-26 | 2013-03-20 | Kawasaki Jukogyo Kabushiki Kaisha | Slip suppression control system for vehicle |
| US8352116B2 (en) * | 2009-01-15 | 2013-01-08 | Delta Systems, Inc. | Tilt and/or acceleration sensing apparatus and method |
| IT1394715B1 (it) | 2009-06-09 | 2012-07-13 | Milano Politecnico | Sistema e metodo di controllo della trazione in un veicolo a due ruote |
| US9403415B2 (en) * | 2009-10-12 | 2016-08-02 | Ford Global Technologies | GPS based pitch sensing for an integrated stability control system |
| JP5251835B2 (ja) | 2009-11-06 | 2013-07-31 | 国産電機株式会社 | 自動二輪車用エンジン制御装置 |
| JP2011152834A (ja) * | 2010-01-26 | 2011-08-11 | Toyota Motor Corp | 車両およびその制御方法 |
| JP5376167B2 (ja) * | 2010-03-05 | 2013-12-25 | 国産電機株式会社 | 自動二輪車用エンジン制御装置 |
| DE102010003951A1 (de) | 2010-04-14 | 2011-10-20 | Robert Bosch Gmbh | Verfahren zum Stabilisieren eines Zweirads bei seitlich rutschendem Hinterrad |
| JP5466126B2 (ja) * | 2010-09-30 | 2014-04-09 | 本田技研工業株式会社 | 自動二輪車の姿勢制御装置及び自動二輪車 |
| JP5713741B2 (ja) * | 2011-03-18 | 2015-05-07 | 本田技研工業株式会社 | 自動二輪車の変速制御装置 |
| WO2013014945A1 (ja) * | 2011-07-28 | 2013-01-31 | ヤマハ発動機株式会社 | 姿勢制御装置及びそれを備えた鞍乗り型車両 |
| ITMI20111729A1 (it) * | 2011-09-26 | 2013-03-27 | Shock S R L E | Metodo e sistema per il controllo di stabilità di un veicolo a due ruote mediante sospensione elettronicamente modulabile |
| US8989980B2 (en) * | 2012-01-31 | 2015-03-24 | Yamaha Hatsudoki Kabushiki Kaisha | Brake device and saddle riding type vehicle |
| WO2013118431A1 (ja) * | 2012-02-10 | 2013-08-15 | ヤマハ発動機株式会社 | 車両および吸気量制御装置 |
| JP5926095B2 (ja) | 2012-03-30 | 2016-05-25 | 本田技研工業株式会社 | 自動二輪車用トラクション制御装置 |
| CN104619530B (zh) * | 2012-07-10 | 2017-03-08 | 高达国际有限公司 | 用于三轮车辆的转向和控制系统 |
| JP5836558B2 (ja) * | 2012-07-25 | 2015-12-24 | ボッシュ株式会社 | 二輪車の転倒防止方法及び装置 |
| WO2014022315A2 (en) * | 2012-07-31 | 2014-02-06 | Helix Motors International, Inc. | Three-wheeled tilting vehicle |
| WO2014064730A1 (ja) * | 2012-10-22 | 2014-05-01 | 川崎重工業株式会社 | 電動式乗物の回生ブレーキ制御システム |
| DE102012222884A1 (de) * | 2012-12-12 | 2014-06-12 | Robert Bosch Gmbh | Verfahren zur Stabilisierung eines Zweirads |
| JP6148592B2 (ja) * | 2013-10-15 | 2017-06-14 | ヤマハ発動機株式会社 | 車速決定システム、安定制御システム及びそれを備えた鞍乗り型車両 |
| JP5844331B2 (ja) * | 2013-10-21 | 2016-01-13 | ヤマハ発動機株式会社 | 縦力制御装置およびそれを備えた鞍乗り型車両 |
| JP5955306B2 (ja) * | 2013-12-09 | 2016-07-20 | 本田技研工業株式会社 | 移動車両 |
| WO2015133397A1 (ja) * | 2014-03-03 | 2015-09-11 | ボッシュ株式会社 | 二輪車用ブレーキ装置の制動力制御方法及び制動力制御装置 |
| JP5945571B2 (ja) * | 2014-09-03 | 2016-07-05 | ヤマハ発動機株式会社 | トラクション制御システムおよび鞍乗り型車両 |
| JP5945572B2 (ja) | 2014-09-03 | 2016-07-05 | ヤマハ発動機株式会社 | 駆動力制御システムおよび鞍乗り型車両 |
-
2014
- 2014-09-03 JP JP2014179161A patent/JP5945572B2/ja active Active
- 2014-12-04 EP EP14196399.1A patent/EP2993333B1/en active Active
- 2014-12-10 US US14/566,705 patent/US9758041B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7171457B2 (ja) | 2019-01-25 | 2022-11-15 | 三菱重工業株式会社 | 粉塵回収装置及びそれを備えた排ガス処理装置並びに粉塵回収方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016053324A (ja) | 2016-04-14 |
| US20160061132A1 (en) | 2016-03-03 |
| EP2993333B1 (en) | 2016-10-05 |
| US9758041B2 (en) | 2017-09-12 |
| EP2993333A1 (en) | 2016-03-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5945572B2 (ja) | 駆動力制御システムおよび鞍乗り型車両 | |
| JP5873143B2 (ja) | 鞍乗り型車両 | |
| CN107428260B (zh) | 电动车辆的驱动力控制装置 | |
| JP5844331B2 (ja) | 縦力制御装置およびそれを備えた鞍乗り型車両 | |
| US10843682B2 (en) | Vehicle controller | |
| JP6880590B2 (ja) | 操舵補助装置及び操舵補助方法 | |
| JPWO2018197965A1 (ja) | 制御装置、制御方法及びブレーキシステム | |
| US11312367B2 (en) | Controller and control method | |
| JP2010285987A (ja) | 二輪自動車のトラクション制御システムおよび制御方法 | |
| US20240025408A1 (en) | Vehicle control device | |
| JP2017072129A (ja) | ウィリー抑制装置 | |
| JP5848149B2 (ja) | 車両に働く駆動力を制御する制御装置 | |
| JP6008957B2 (ja) | 車両 | |
| JP5840112B2 (ja) | 車両挙動安定化制御装置 | |
| JP4626550B2 (ja) | 車両の旋回挙動制御装置 | |
| JP5185912B2 (ja) | 車両挙動制御装置 | |
| JP5945571B2 (ja) | トラクション制御システムおよび鞍乗り型車両 | |
| JP5454448B2 (ja) | 電気自動車のトルク制御装置 | |
| JP2008273289A (ja) | ハイブリッド車の制御装置 | |
| KR100845026B1 (ko) | 전기차량의 이동을 선택적으로 방지하기 위한 시스템 및방법 | |
| US20220203979A1 (en) | Controller and control method | |
| JP2015003686A (ja) | 車両安定装置 | |
| JP4670691B2 (ja) | 車両用駆動制御装置、自動車及び車両用駆動制御方法 | |
| JP6388259B2 (ja) | 車両用挙動制御装置 | |
| JP7169201B2 (ja) | リーン車両の制御装置及び転倒予測方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160223 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160524 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160530 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5945572 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |