JP2024028448A - slit lamp microscope - Google Patents
slit lamp microscope Download PDFInfo
- Publication number
- JP2024028448A JP2024028448A JP2024002303A JP2024002303A JP2024028448A JP 2024028448 A JP2024028448 A JP 2024028448A JP 2024002303 A JP2024002303 A JP 2024002303A JP 2024002303 A JP2024002303 A JP 2024002303A JP 2024028448 A JP2024028448 A JP 2024028448A
- Authority
- JP
- Japan
- Prior art keywords
- image
- imaging
- imaging system
- images
- slit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000003384 imaging method Methods 0.000 claims abstract description 522
- 238000005286 illumination Methods 0.000 claims abstract description 269
- 230000003287 optical effect Effects 0.000 claims abstract description 267
- 230000033001 locomotion Effects 0.000 claims abstract description 91
- 230000007246 mechanism Effects 0.000 claims abstract description 91
- 210000002294 anterior eye segment Anatomy 0.000 claims description 34
- 238000001514 detection method Methods 0.000 claims description 21
- 230000008859 change Effects 0.000 claims description 3
- 238000012545 processing Methods 0.000 description 157
- 238000004891 communication Methods 0.000 description 99
- 210000000695 crystalline len Anatomy 0.000 description 90
- 238000012937 correction Methods 0.000 description 78
- 238000010276 construction Methods 0.000 description 68
- 238000009877 rendering Methods 0.000 description 65
- 238000000034 method Methods 0.000 description 53
- 210000004087 cornea Anatomy 0.000 description 45
- 238000005259 measurement Methods 0.000 description 44
- 230000006870 function Effects 0.000 description 40
- 230000010365 information processing Effects 0.000 description 38
- 230000000694 effects Effects 0.000 description 35
- 238000010586 diagram Methods 0.000 description 34
- 230000008569 process Effects 0.000 description 25
- 238000000605 extraction Methods 0.000 description 20
- 239000000284 extract Substances 0.000 description 16
- 238000003745 diagnosis Methods 0.000 description 14
- 238000012546 transfer Methods 0.000 description 13
- 230000009471 action Effects 0.000 description 11
- 201000010099 disease Diseases 0.000 description 10
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 10
- 210000001747 pupil Anatomy 0.000 description 9
- 230000015572 biosynthetic process Effects 0.000 description 8
- 238000005516 engineering process Methods 0.000 description 7
- 238000000386 microscopy Methods 0.000 description 7
- 238000003786 synthesis reaction Methods 0.000 description 7
- 230000005540 biological transmission Effects 0.000 description 6
- 238000010191 image analysis Methods 0.000 description 6
- 230000011218 segmentation Effects 0.000 description 6
- 238000012014 optical coherence tomography Methods 0.000 description 5
- 210000001519 tissue Anatomy 0.000 description 5
- 238000004458 analytical method Methods 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000013473 artificial intelligence Methods 0.000 description 3
- 210000001061 forehead Anatomy 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 238000007689 inspection Methods 0.000 description 3
- 238000012216 screening Methods 0.000 description 3
- 230000002123 temporal effect Effects 0.000 description 3
- 206010047571 Visual impairment Diseases 0.000 description 2
- 238000007792 addition Methods 0.000 description 2
- 230000002411 adverse Effects 0.000 description 2
- 210000002159 anterior chamber Anatomy 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 230000001149 cognitive effect Effects 0.000 description 2
- 210000000399 corneal endothelial cell Anatomy 0.000 description 2
- 238000003708 edge detection Methods 0.000 description 2
- 230000004410 intraocular pressure Effects 0.000 description 2
- 230000001678 irradiating effect Effects 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 238000006467 substitution reaction Methods 0.000 description 2
- 230000004304 visual acuity Effects 0.000 description 2
- 241000699666 Mus <mouse, genus> Species 0.000 description 1
- 241000699670 Mus sp. Species 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 238000009530 blood pressure measurement Methods 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 208000030533 eye disease Diseases 0.000 description 1
- 230000004438 eyesight Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 210000004175 meibomian gland Anatomy 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000003909 pattern recognition Methods 0.000 description 1
- 230000000649 photocoagulation Effects 0.000 description 1
- 238000002428 photodynamic therapy Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000007639 printing Methods 0.000 description 1
- 230000002250 progressing effect Effects 0.000 description 1
- 238000012797 qualification Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000012827 research and development Methods 0.000 description 1
- 230000002207 retinal effect Effects 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 230000002194 synthesizing effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images





























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/13—Ophthalmic microscopes
- A61B3/135—Slit-lamp microscopes
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Biophysics (AREA)
- Ophthalmology & Optometry (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Eye Examination Apparatus (AREA)
Abstract
Description
本発明は、スリットランプ顕微鏡に関する。 The present invention relates to a slit lamp microscope.
眼科分野において画像診断は重要な位置を占める。画像診断では、各種の眼科撮影装置が用いられる。眼科撮影装置には、スリットランプ顕微鏡、眼底カメラ、走査型レーザー検眼鏡(SLO)、光干渉断層計(OCT)などがある。また、レフラクトメータ、ケラトメータ、眼圧計、スペキュラーマイクロスコープ、ウェーブフロントアナライザ、マイクロペリメータなどの各種の検査装置や測定装置にも、前眼部や眼底を撮影する機能が搭載されている。 Image diagnosis occupies an important position in the field of ophthalmology. In image diagnosis, various ophthalmological imaging devices are used. Ophthalmological imaging devices include a slit lamp microscope, a fundus camera, a scanning laser ophthalmoscope (SLO), and an optical coherence tomography (OCT). In addition, various inspection and measurement devices such as refractometers, keratometers, tonometers, specular microscopes, wavefront analyzers, and microperimeters are also equipped with functions for photographing the anterior segment and fundus of the eye.
これら様々な眼科装置のうち最も広く且つ頻繁に使用される装置の一つがスリットランプ顕微鏡である。スリットランプ顕微鏡は、スリット光で被検眼を照明し、照明された断面を側方から顕微鏡で観察したり撮影したりするための眼科装置である(例えば、特許文献1、2を参照)。
One of the most widely and frequently used of these various ophthalmic devices is the slit lamp microscope. A slit lamp microscope is an ophthalmological device that illuminates a subject's eye with slit light and observes or photographs the illuminated cross section from the side with a microscope (see, for example,
角膜や水晶体など前眼部の観察や診断には、一般的にスリットランプ顕微鏡が用いられる。例えば、医師は、スリット光による照明野やフォーカス位置を移動させつつ診断部位全体を観察して異常の有無を判断する。また、コンタクトレンズのフィッティング状態の確認など、視力補正器具の処方において、スリットランプ顕微鏡が用いられることもある。更に、オプトメトリストのように医師以外の資格を持つ者や、眼鏡店の店員などが、眼疾患のスクリーニング等の目的でスリットランプ顕微鏡を用いることもある。 A slit lamp microscope is generally used to observe and diagnose the anterior segment of the eye, such as the cornea and crystalline lens. For example, a doctor observes the entire diagnosis site while moving the illumination field and focus position of the slit light to determine the presence or absence of an abnormality. Additionally, a slit lamp microscope is sometimes used in prescribing vision correction devices, such as checking the fitting condition of contact lenses. Furthermore, slit lamp microscopes are sometimes used by people with qualifications other than doctors, such as optometrists, and employees of eyeglass stores, for purposes such as screening for eye diseases.
ところで、近年の情報通信技術の進歩を受けて、遠隔医療技術に関する研究開発が発展を見せている。遠隔医療とは、インターネット等の情報技術を利用して、遠隔地に居る患者に対して診療を行う行為である。特許文献3、4にはスリットランプ顕微鏡を遠隔地から操作するための技術が開示されている。
By the way, in response to recent advances in information and communication technology, research and development regarding telemedicine technology is progressing. Telemedicine is the act of providing medical treatment to patients in remote locations using information technology such as the Internet.
しかしながら、スリットランプを用いて良好な画像を得るには、照明角度や撮影角度の調整など、微細で煩雑な操作が必要とされる。特許文献3、4に開示された技術では、目の前に居る被検者の眼を観察する場合でも難しい操作を、遠隔地に居る検者が実施しなければならないため、検査時間が長くなったり、良好な画像が得られなかったりといった問題が生じる。
However, obtaining good images using a slit lamp requires detailed and complicated operations such as adjusting the illumination angle and photographing angle. With the techniques disclosed in
また、上記のようにスリットランプ顕微鏡はスクリーニング等の検査に有効であるが、同装置に関する専門技術の保持者が不足しており、高品質な検査を多くの人に提供することができないという現状がある。 Additionally, as mentioned above, slit lamp microscopes are effective for inspections such as screening, but there is currently a shortage of people with specialized skills related to the equipment, making it difficult to provide high-quality inspections to many people. There is.
本発明の目的は、高品質なスリットランプ顕微鏡検査を広く提供することを可能にすることにある。 An object of the present invention is to make it possible to widely provide high-quality slit lamp microscopy.
例示的な実施形態の第1の態様は、被検眼の前眼部にスリット光を照射する照明系と、前記スリット光が照射されている前記前眼部からの光を導く光学系と前記光学系により導かれた前記光を撮像面で受光する撮像素子とを含む撮影系と、前記照明系及び前記撮影系を移動する移動機構とを含み、前記照明系の光軸に沿う物面と前記光学系と前記撮像面とがシャインプルーフの条件を満足し、前記撮影系は、前記移動機構による前記照明系及び前記撮影系の移動と並行して繰り返し撮影を行うことにより前記前眼部の複数の画像を取得することを特徴とするスリットランプ顕微鏡である。 A first aspect of the exemplary embodiment includes an illumination system that irradiates the anterior segment of the eye to be examined with slit light, an optical system that guides light from the anterior segment that is irradiated with the slit light, and the optical system. an imaging system including an image sensor that receives the light guided by the system on an imaging surface; a moving mechanism that moves the illumination system and the imaging system; The optical system and the imaging surface satisfy the Scheimpflug condition, and the imaging system captures a plurality of images of the anterior segment by repeatedly performing imaging in parallel with the movement of the illumination system and the imaging system by the moving mechanism. This is a slit lamp microscope characterized by acquiring images of.
例示的な実施形態の第2の態様は、第1の態様のスリットランプ顕微鏡であって、前記撮影系は、前記スリット光が照射されている前記前眼部からの光を導く第1光学系と、前記第1光学系により導かれた前記光を第1撮像面で受光する第1撮像素子とを含み、前記移動と並行して繰り返し撮影を行うことにより第1画像群を取得する第1撮影系と、前記スリット光が照射されている前記前眼部からの光を導く第2光学系と、前記第2光学系により導かれた前記光を第2撮像面で受光する第2撮像素子とを含み、前記移動と並行して繰り返し撮影を行うことにより第2画像群を取得する第2撮影系とを含み、前記第1光学系の光軸と前記第2光学系の光軸とは、互いに異なる向きに配置されており、前記物面と前記第1光学系と前記第1撮像面とがシャインプルーフの条件を満足し、且つ、前記物面と前記第2光学系と前記第2撮像面とがシャインプルーフの条件を満足することを特徴とする。 A second aspect of the exemplary embodiment is the slit lamp microscope according to the first aspect, wherein the imaging system is a first optical system that guides light from the anterior segment of the eye to which the slit light is irradiated. and a first imaging device that receives the light guided by the first optical system on a first imaging surface, and acquires a first image group by repeatedly photographing in parallel with the movement. an imaging system, a second optical system that guides light from the anterior eye segment irradiated with the slit light, and a second image sensor that receives the light guided by the second optical system on a second imaging surface. and a second imaging system that acquires a second image group by repeatedly performing imaging in parallel with the movement, and the optical axis of the first optical system and the optical axis of the second optical system are , are arranged in mutually different directions, the object plane, the first optical system, and the first imaging plane satisfy the Scheimpflug condition, and the object plane, the second optical system, and the second imaging plane satisfy the Scheimpflug condition. The imaging surface is characterized in that the imaging surface satisfies Scheimpflug conditions.
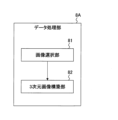
例示的な実施形態の第3の態様は、第2の態様のスリットランプ顕微鏡であって、前記第1光学系の光軸と前記第2光学系の光軸とは、前記照明系の光軸に対して互いに反対の方向に傾斜して配置されており、前記第1撮影系及び前記第2撮影系により実質的に同時に取得された2つの画像のいずれかにアーティファクトが含まれるか判定し、前記2つの画像のうちの一方の画像にアーティファクトが含まれると判定されたときに他方の画像を選択する画像選択部を更に含むことを特徴とする。 A third aspect of the exemplary embodiment is the slit lamp microscope according to the second aspect, wherein the optical axis of the first optical system and the optical axis of the second optical system are the optical axis of the illumination system. are arranged to be inclined in opposite directions to each other, and determine whether an artifact is included in either of the two images obtained substantially simultaneously by the first imaging system and the second imaging system, The image processing apparatus is characterized in that it further includes an image selection section that selects the other image when it is determined that one of the two images includes an artifact.
例示的な実施形態の第4の態様は、第3の態様のスリットランプ顕微鏡であって、前記画像選択部により前記第1画像群及び前記第2画像群から選択された画像を含む画像群に基づいて3次元画像を構築する3次元画像構築部を更に含むことを特徴とする。 A fourth aspect of the exemplary embodiment is the slit lamp microscope according to the third aspect, in which a group of images including an image selected from the first group of images and the second group of images by the image selection section is provided. The image forming apparatus is characterized in that it further includes a three-dimensional image construction unit that constructs a three-dimensional image based on the three-dimensional image.
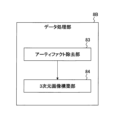
例示的な実施形態の第5の態様は、第2の態様のスリットランプ顕微鏡であって、前記第1撮影系及び前記第2撮影系により実質的に同時に取得された2つの画像を比較することにより前記2つの画像のいずれかにアーティファクトが含まれるか判定し、前記2つの画像のいずれかにアーティファクトが含まれると判定されたときに当該アーティファクトを除去するアーティファクト除去部を更に含むことを特徴とする。 A fifth aspect of the exemplary embodiment is the slit lamp microscope of the second aspect, wherein two images obtained substantially simultaneously by the first imaging system and the second imaging system are compared. The method further includes an artifact removal unit that determines whether an artifact is included in either of the two images, and removes the artifact when it is determined that the artifact is included in either of the two images. do.
例示的な実施形態の第6の態様は、第5の態様のスリットランプ顕微鏡であって、前記アーティファクト除去部によりアーティファクトが除去された画像を含む画像群に基づいて3次元画像を構築する3次元画像構築部を更に含むことを特徴とする。 A sixth aspect of the exemplary embodiment is the slit lamp microscope according to the fifth aspect, wherein a three-dimensional image is constructed based on a group of images including images from which artifacts have been removed by the artifact removal section. The image forming apparatus is characterized in that it further includes an image construction section.
例示的な実施形態の第7の態様は、第1の態様のスリットランプ顕微鏡であって、前記撮影系により取得された前記複数の画像に基づいて3次元画像を構築する3次元画像構築部を更に含むことを特徴とする。 A seventh aspect of the exemplary embodiment is the slit lamp microscope according to the first aspect, which includes a three-dimensional image construction unit that constructs a three-dimensional image based on the plurality of images acquired by the imaging system. It is characterized by further comprising:
例示的な実施形態の第8の態様は、第4、6及び7の態様のいずれかのスリットランプ顕微鏡であって、前記移動機構は、前記照明系の光軸を回転軸として前記照明系及び前記撮影系を一体的に回転する回転機構を含み、前記照明系及び前記撮影系が第1回転位置に配置されているときに、前記撮影系は、前記複数の画像を取得し、前記第1回転位置と異なる第2回転位置に前記照明系及び前記撮影系が配置されているときに、前記撮影系は、前記照明系によりスリット光が照射されている前記前眼部の画像を取得し、前記3次元画像構築部は、前記第2回転位置において取得された前記画像に基づいて前記複数の画像の相対位置を決定する画像位置決定部を含むことを特徴とする。 An eighth aspect of the exemplary embodiment is the slit lamp microscope according to any one of the fourth, sixth, and seventh aspects, wherein the moving mechanism rotates the illumination system and the illumination system with the optical axis of the illumination system as a rotation axis. The imaging system includes a rotation mechanism that integrally rotates the imaging system, and when the illumination system and the imaging system are arranged at a first rotation position, the imaging system acquires the plurality of images and rotates the imaging system at the first rotation position. When the illumination system and the imaging system are arranged at a second rotational position different from the rotational position, the imaging system acquires an image of the anterior segment irradiated with slit light by the illumination system, The three-dimensional image construction unit is characterized in that it includes an image position determination unit that determines relative positions of the plurality of images based on the images acquired at the second rotational position.
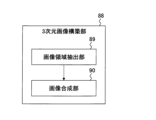
例示的な実施形態の第9の態様は、第4、6~8の態様のいずれかのスリットランプ顕微鏡であって、前記3次元画像構築部は、前記複数の画像のそれぞれから、前記スリット光の照射領域に対応する画像領域を抽出する画像領域抽出部と、前記画像領域抽出部により前記複数の画像からそれぞれ抽出された複数の画像領域を合成して3次元画像を構築する画像合成部とを含むことを特徴とする。 A ninth aspect of the exemplary embodiment is the slit lamp microscope according to any one of the fourth, sixth to eighth aspects, wherein the three-dimensional image constructing unit extracts the slit light from each of the plurality of images. an image region extraction section that extracts an image region corresponding to the irradiation region; and an image synthesis section that composes a plurality of image regions respectively extracted from the plurality of images by the image region extraction section to construct a three-dimensional image. It is characterized by including.
例示的な実施形態の第10の態様は、第9の態様のスリットランプ顕微鏡であって、前記画像領域抽出部は、前記複数の画像のそれぞれから、前記スリット光の照射領域及び前記前眼部の所定部位の双方に対応する画像領域を抽出することを特徴とする。 A tenth aspect of the exemplary embodiment is the slit lamp microscope according to the ninth aspect, wherein the image area extracting unit extracts the slit light irradiation area and the anterior ocular segment from each of the plurality of images. It is characterized by extracting an image area corresponding to both predetermined parts of the image.
例示的な実施形態の第11の態様は、第10の態様のスリットランプ顕微鏡であって、前記所定部位は、角膜前面及び水晶体後面により画成される部位であることを特徴とする。 An eleventh aspect of the exemplary embodiment is the slit lamp microscope according to the tenth aspect, wherein the predetermined region is a region defined by the anterior surface of the cornea and the posterior surface of the crystalline lens.
例示的な実施形態の第12の態様は、第4、6~11の態様のいずれかのスリットランプ顕微鏡であって、前記3次元画像をレンダリングしてレンダリング画像を構築するレンダリング部を更に含むことを特徴とする。 A twelfth aspect of the exemplary embodiment is the slit lamp microscope according to any one of the fourth, sixth to eleventh aspects, further comprising a rendering unit that renders the three-dimensional image to construct a rendered image. It is characterized by
例示的な実施形態の第13の態様は、第12の態様のスリットランプ顕微鏡であって、前記3次元画像に対して断面が指定されたとき、前記レンダリング部は、前記3次元画像を当該断面で切断して3次元部分画像を構築することを特徴とする。 A thirteenth aspect of the exemplary embodiment is the slit lamp microscope according to the twelfth aspect, in which when a cross section is specified for the three-dimensional image, the rendering unit converts the three-dimensional image into the cross-section. The feature is that a three-dimensional partial image is constructed by cutting the image.
例示的な実施形態の第14の態様は、第12の態様のスリットランプ顕微鏡であって、前記3次元画像に対して断面が指定されたとき、前記レンダリング部は、当該断面を表す2次元断面画像を構築することを特徴とする。 A fourteenth aspect of the exemplary embodiment is the slit lamp microscope according to the twelfth aspect, in which when a cross section is specified for the three-dimensional image, the rendering unit is configured to provide a two-dimensional cross section representing the cross section. It is characterized by constructing an image.
例示的な実施形態の第15の態様は、第12の態様のスリットランプ顕微鏡であって、前記3次元画像に対してスライスが指定されたとき、前記レンダリング部は、当該スライスに対応する3次元スライス画像を構築することを特徴とする。 A fifteenth aspect of the exemplary embodiment is the slit lamp microscope according to the twelfth aspect, in which when a slice is specified for the three-dimensional image, the rendering section It is characterized by constructing slice images.
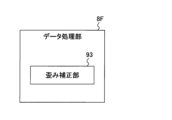
例示的な実施形態の第16の態様は、第1~15の態様のいずれかのスリットランプ顕微鏡であって、前記照明系の光軸と前記撮影系の光軸とがなす角度である光軸角度に起因する歪みを補正するための処理を、前記複数の画像のうちの少なくとも1つに適用する歪み補正部を更に含むことを特徴とする。 A sixteenth aspect of the exemplary embodiment is the slit lamp microscope according to any one of the first to fifteenth aspects, wherein the optical axis is an angle formed by the optical axis of the illumination system and the optical axis of the imaging system. The image processing apparatus is characterized in that it further includes a distortion correction unit that applies processing for correcting distortion caused by angle to at least one of the plurality of images.
例示的な実施形態の第17の態様は、第16の態様のスリットランプ顕微鏡であって、前記撮影系に含まれる前記光学系の光軸は、前記照明系の光軸に対して、前記照明系の光軸に沿う第1方向及び前記スリット光の長手方向に沿う第2方向の双方に直交する第3方向に傾斜して配置されており、前記歪み補正部は、前記第1方向及び前記第2方向の双方を含む平面における歪みを補正するための処理を実行することを特徴とする。 A seventeenth aspect of the exemplary embodiment is the slit lamp microscope according to the sixteenth aspect, wherein the optical axis of the optical system included in the imaging system is relative to the optical axis of the illumination system. The distortion correction section is arranged to be inclined in a third direction perpendicular to both a first direction along the optical axis of the system and a second direction along the longitudinal direction of the slit light, and the distortion correction section The present invention is characterized in that processing for correcting distortion in a plane including both directions in the second direction is executed.
例示的な実施形態の第18の態様は、第16又は17の態様のスリットランプ顕微鏡であって、前記歪み補正部は、所定の基準角度と前記光軸角度とに基づき設定された補正係数を予め記憶しており、当該補正係数に基づいて前記歪みを補正するための処理を実行することを特徴とする。 An 18th aspect of the exemplary embodiment is the slit lamp microscope according to the 16th or 17th aspect, wherein the distortion correction section adjusts a correction coefficient set based on a predetermined reference angle and the optical axis angle. The correction coefficient is stored in advance, and processing for correcting the distortion is executed based on the correction coefficient.
例示的な実施形態の第19の態様は、第1~18の態様のいずれかのスリットランプ顕微鏡であって、前記撮影系により取得された前記複数の画像のうちの少なくとも1つを解析することにより所定の計測値を求める第1計測部を更に含むことを特徴とする。 A nineteenth aspect of the exemplary embodiment is the slit lamp microscope according to any one of the first to eighteenth aspects, wherein at least one of the plurality of images acquired by the imaging system is analyzed. The apparatus is characterized in that it further includes a first measurement section that obtains a predetermined measurement value.
例示的な実施形態の第20の態様は、第4、6~15の態様のいずれかのスリットランプ顕微鏡であって、前記3次元画像構築部により構築された前記3次元画像を解析することにより所定の計測値を求める第2計測部を更に含むことを特徴とする。 A 20th aspect of the exemplary embodiment is the slit lamp microscope according to any one of the 4th, 6th to 15th aspects, wherein the slit lamp microscope is configured to analyze the three-dimensional image constructed by the three-dimensional image construction section. The apparatus is characterized in that it further includes a second measurement section that obtains a predetermined measurement value.
例示的な実施形態の第21の態様は、第1~20の態様のいずれかのスリットランプ顕微鏡であって、前記照明系及び前記撮影系は、少なくとも角膜前面及び水晶体後面により画成される部位に前記撮影系のピントが合うように構成されていることを特徴とする。 A twenty-first aspect of the exemplary embodiment is the slit lamp microscope according to any one of the first to twentieth aspects, wherein the illumination system and the imaging system are arranged in a region defined by at least the anterior surface of the cornea and the posterior surface of the crystalline lens. The camera is characterized in that the photographing system is configured to be in focus.
例示的な実施形態の第22の態様は、第1~21の態様のいずれかのスリットランプ顕微鏡であって、前記照明系は、被検者の体軸方向を長手方向とするスリット光を前記前眼部に照射し、前記移動機構は、前記体軸方向に直交する方向に前記照明系及び前記撮影系を移動することを特徴とする。 A twenty-second aspect of the exemplary embodiment is the slit lamp microscope according to any one of the first to twenty-first aspects, wherein the illumination system emits the slit light whose longitudinal direction is the body axis direction of the subject. The anterior segment of the eye is irradiated with the illumination system, and the moving mechanism moves the illumination system and the imaging system in a direction perpendicular to the body axis direction.
例示的な実施形態の第23の態様は、第22の態様のスリットランプ顕微鏡であって、前記スリット光の長さは、前記体軸方向における角膜径以上であり、前記移動機構による前記照明系及び前記撮影系の移動距離は、前記体軸方向に直交する方向における角膜径以上であることを特徴とする。 A twenty-third aspect of the exemplary embodiment is the slit lamp microscope according to the twenty-second aspect, wherein the length of the slit light is equal to or longer than the corneal diameter in the body axis direction, and the illumination system by the moving mechanism The imaging system is characterized in that a moving distance of the imaging system is equal to or larger than a corneal diameter in a direction perpendicular to the body axis direction.
例示的な実施形態の第24の態様は、第1~23の態様のいずれかのスリットランプ顕微鏡であって、前記撮影系に含まれる前記光学系は、前記スリット光が照射されている前記前眼部からの光であって、前記照明系の光軸から離れる方向に進行する光を、前記照明系の光軸に近づく方向に反射する反射器と、前記反射器により反射された前記光を前記撮像面に結像させる1以上のレンズとを含むことを特徴とする。 A twenty-fourth aspect of the exemplary embodiment is the slit lamp microscope according to any one of the first to twenty-third aspects, wherein the optical system included in the imaging system includes a reflector that reflects light from the eye that travels in a direction away from the optical axis of the illumination system in a direction approaching the optical axis of the illumination system, and a reflector that reflects the light reflected by the reflector. and one or more lenses that form an image on the imaging surface.
例示的な実施形態の第25の態様は、第1~24の態様のいずれかのスリットランプ顕微鏡であって、撮影系による前記複数の画像の取得と並行して前記前眼部を固定位置から動画撮影する動画撮影系を更に含むことを特徴とする。 A twenty-fifth aspect of the exemplary embodiment is the slit lamp microscope according to any one of the first to twenty-fourth aspects, in which the anterior segment of the eye is moved from a fixed position in parallel with the acquisition of the plurality of images by the imaging system. The present invention is characterized in that it further includes a moving image shooting system for shooting moving images.
例示的な実施形態の第26の態様は、第25の態様のスリットランプ顕微鏡であって、前記動画撮影系により取得される動画像を解析して前記被検眼の運動を検出する運動検出部を更に含むことを特徴とする。 A twenty-sixth aspect of the exemplary embodiment is the slit lamp microscope according to the twenty-fifth aspect, further comprising a motion detection unit that analyzes a moving image acquired by the video imaging system and detects the movement of the eye to be examined. It is characterized by further comprising:
例示的な実施形態の第27の態様は、第26の態様のスリットランプ顕微鏡であって、前記運動検出部からの出力に基づいて前記移動機構を制御する移動制御部を更に含むことを特徴とする。 A twenty-seventh aspect of the exemplary embodiment is the slit lamp microscope according to the twenty-sixth aspect, further comprising a movement control section that controls the movement mechanism based on the output from the movement detection section. do.
例示的な実施形態の第28の態様は、第1~27の態様のいずれかのスリットランプ顕微鏡であって、前記前眼部について取得された画像を情報処理装置に向けて送信する通信部を更に含むことを特徴とする。 A twenty-eighth aspect of the exemplary embodiment is the slit lamp microscope according to any one of the first to twenty-seventh aspects, further comprising a communication unit that transmits an image acquired of the anterior segment to an information processing device. It is characterized by further comprising:
例示的な実施形態の第29の態様は、スリットランプ顕微鏡と、通信回線を介して前記スリットランプ顕微鏡に接続されており、前記スリットランプ顕微鏡により取得された被検眼の前眼部の画像を処理する情報処理装置とを含む眼科システムである。前記スリットランプ顕微鏡は、被検眼の前眼部にスリット光を照射する照明系と、前記スリット光が照射されている前記前眼部からの光を導く光学系と前記光学系により導かれた前記光を撮像面で受光する撮像素子とを含む撮影系と、前記照明系及び前記撮影系を移動する移動機構とを含む。前記照明系の光軸に沿う物面と前記光学系と前記撮像面とは、シャインプルーフの条件を満足する。前記撮影系は、前記移動機構による前記照明系及び前記撮影系の移動と並行して繰り返し撮影を行うことにより前記前眼部の複数の画像を取得する。 A twenty-ninth aspect of the exemplary embodiment is a slit lamp microscope connected to the slit lamp microscope via a communication line to process an image of the anterior segment of the subject's eye acquired by the slit lamp microscope. This is an ophthalmology system including an information processing device. The slit lamp microscope includes an illumination system that irradiates the anterior segment of the subject's eye with slit light, an optical system that guides light from the anterior segment that is irradiated with the slit light, and a system that guides the light from the anterior segment that is irradiated with the slit light. The image capturing system includes an imaging device that receives light on an imaging surface, and a moving mechanism that moves the illumination system and the imaging system. The object surface along the optical axis of the illumination system, the optical system, and the imaging surface satisfy the Scheimpflug condition. The imaging system acquires a plurality of images of the anterior segment of the eye by repeatedly performing imaging in parallel with the movement of the illumination system and the imaging system by the moving mechanism.
例示的な実施形態の第30の態様は、第29の態様の眼科システムであって、前記スリットランプ顕微鏡の前記撮影系は、前記スリット光が照射されている前記前眼部からの光を導く第1光学系と、前記第1光学系により導かれた前記光を第1撮像面で受光する第1撮像素子とを含み、前記移動と並行して繰り返し撮影を行うことにより第1画像群を取得する第1撮影系と、前記スリット光が照射されている前記前眼部からの光を導く第2光学系と、前記第2光学系により導かれた前記光を第2撮像面で受光する第2撮像素子とを含み、前記移動と並行して繰り返し撮影を行うことにより第2画像群を取得する第2撮影系とを含み、前記第1光学系の光軸と前記第2光学系の光軸とは、互いに異なる向きに配置されており、前記物面と前記第1光学系と前記第1撮像面とがシャインプルーフの条件を満足し、且つ、前記物面と前記第2光学系と前記第2撮像面とがシャインプルーフの条件を満足することを特徴とする。 A 30th aspect of the exemplary embodiment is the ophthalmological system according to the 29th aspect, wherein the imaging system of the slit lamp microscope guides light from the anterior segment of the eye to which the slit light is irradiated. It includes a first optical system and a first image sensor that receives the light guided by the first optical system on a first imaging surface, and captures a first image group by repeatedly photographing in parallel with the movement. a first imaging system for capturing, a second optical system that guides light from the anterior eye segment irradiated with the slit light, and a second imaging surface that receives the light guided by the second optical system. and a second imaging system that acquires a second image group by repeatedly performing imaging in parallel with the movement, the optical axis of the first optical system and the second optical system The optical axes are arranged in different directions from each other, and the object surface, the first optical system, and the first imaging surface satisfy the Scheimpflug condition, and the object surface and the second optical system and the second imaging surface satisfy Scheimpflug conditions.
例示的な実施形態の第31の態様は、第30の態様の眼科システムであって、前記第1光学系の光軸と前記第2光学系の光軸とは、前記照明系の光軸に対して互いに反対の方向に傾斜して配置されており、前記情報処理装置は、前記第1撮影系及び前記第2撮影系により実質的に同時に取得された2つの画像のいずれかにアーティファクトが含まれるか判定し、前記2つの画像のうちの一方の画像にアーティファクトが含まれると判定されたときに他方の画像を選択する画像選択部を含むことを特徴とする。 A thirty-first aspect of the exemplary embodiment is the ophthalmological system according to the thirtieth aspect, wherein the optical axis of the first optical system and the optical axis of the second optical system are aligned with the optical axis of the illumination system. The information processing device is arranged to be inclined in opposite directions to each other, and the information processing device is configured to detect artifacts included in either of the two images obtained substantially simultaneously by the first imaging system and the second imaging system. The present invention is characterized in that it includes an image selection section that determines whether or not an artifact is included in one of the two images, and selects the other image when it is determined that one of the two images includes an artifact.
例示的な実施形態の第32の態様は、第31の態様の眼科システムであって、前記情報処理装置は、前記画像選択部により前記第1画像群及び前記第2画像群から選択された画像を含む画像群に基づいて3次元画像を構築する3次元画像構築部を含むことを特徴とする。 A thirty-second aspect of the exemplary embodiment is the ophthalmological system according to the thirty-first aspect, wherein the information processing apparatus selects an image selected from the first image group and the second image group by the image selection unit. It is characterized by including a three-dimensional image construction unit that constructs a three-dimensional image based on a group of images including.
例示的な実施形態の第33の態様は、第30の態様の眼科システムであって、前記情報処理装置は、前記第1撮影系及び前記第2撮影系により実質的に同時に取得された2つの画像を比較することにより前記2つの画像のいずれかにアーティファクトが含まれるか判定し、前記2つの画像のいずれかにアーティファクトが含まれると判定されたときに当該アーティファクトを除去するアーティファクト除去部を含むことを特徴とする。 A 33rd aspect of the exemplary embodiment is the ophthalmological system according to the 30th aspect, in which the information processing apparatus is configured to perform two images acquired substantially simultaneously by the first imaging system and the second imaging system. An artifact removal unit that determines whether an artifact is included in either of the two images by comparing the images, and removes the artifact when it is determined that the artifact is included in either of the two images. It is characterized by
例示的な実施形態の第34の態様は、第33の態様の眼科システムであって、前記情報処理装置は、前記アーティファクト除去部によりアーティファクトが除去された画像を含む画像群に基づいて3次元画像を構築する3次元画像構築部を含むことを特徴とする。 A thirty-fourth aspect of the exemplary embodiment is the ophthalmological system according to the thirty-third aspect, wherein the information processing device generates a three-dimensional image based on a group of images including images from which artifacts have been removed by the artifact removal unit. It is characterized by including a three-dimensional image construction unit that constructs a three-dimensional image.
例示的な実施形態の第35の態様は、第29の態様の眼科システムであって、前記情報処理装置は、前記撮影系により取得された前記複数の画像に基づいて3次元画像を構築する3次元画像構築部を含むことを特徴とする。 A thirty-fifth aspect of the exemplary embodiment is the ophthalmological system according to the twenty-ninth aspect, wherein the information processing device constructs a three-dimensional image based on the plurality of images acquired by the imaging system. It is characterized by including a dimensional image construction unit.
例示的な実施形態の第36の態様は、第32、34及び35の態様のいずれかの眼科システムであって、前記移動機構は、前記照明系の光軸を回転軸として前記照明系及び前記撮影系を一体的に回転する回転機構を含み、前記照明系及び前記撮影系が第1回転位置に配置されているときに、前記撮影系は、前記複数の画像を取得し、前記第1回転位置と異なる第2回転位置に前記照明系及び前記撮影系が配置されているときに、前記撮影系は、前記照明系によりスリット光が照射されている前記前眼部の画像を取得し、前記3次元画像構築部は、前記第2回転位置において取得された前記画像に基づいて前記複数の画像の相対位置を決定する画像位置決定部を含むことを特徴とする。 A thirty-sixth aspect of the exemplary embodiment is the ophthalmologic system according to any one of the thirty-second, thirty-fourth, and thirty-fifth aspects, wherein the moving mechanism moves the illumination system and the The imaging system includes a rotation mechanism that integrally rotates the imaging system, and when the illumination system and the imaging system are arranged at a first rotational position, the imaging system acquires the plurality of images and rotates the imaging system at the first rotational position. When the illumination system and the imaging system are arranged at a second rotational position different from the position, the imaging system acquires an image of the anterior segment irradiated with the slit light by the illumination system, and The three-dimensional image construction unit is characterized in that it includes an image position determination unit that determines relative positions of the plurality of images based on the images acquired at the second rotational position.
例示的な実施形態の第37の態様は、第32、34~36の態様のいずれかの眼科システムであって、前記3次元画像構築部は、前記複数の画像のそれぞれから、前記スリット光の照射領域に対応する画像領域を抽出する画像領域抽出部と、前記画像領域抽出部により前記複数の画像からそれぞれ抽出された複数の画像領域を合成して3次元画像を構築する画像合成部とを含むことを特徴とする。 A thirty-seventh aspect of the exemplary embodiment is the ophthalmological system according to any one of the thirty-second, thirty-fourth to thirty-sixth aspects, wherein the three-dimensional image construction unit generates the slit light from each of the plurality of images. an image region extraction section that extracts an image region corresponding to the irradiation region; and an image synthesis section that synthesizes a plurality of image regions respectively extracted from the plurality of images by the image region extraction section to construct a three-dimensional image. It is characterized by containing.
例示的な実施形態の第38の態様は、第37の態様の眼科システムであって、前記画像領域抽出部は、前記複数の画像のそれぞれから、前記スリット光の照射領域及び前記前眼部の所定部位の双方に対応する画像領域を抽出することを特徴とする。 A thirty-eighth aspect of the exemplary embodiment is the ophthalmological system according to the thirty-seventh aspect, wherein the image area extracting unit extracts the irradiation area of the slit light and the anterior segment from each of the plurality of images. It is characterized by extracting image regions corresponding to both predetermined parts.
例示的な実施形態の第39の態様は、第38の態様の眼科システムであって、前記所定部位は、角膜前面及び水晶体後面により画成される部位であることを特徴とする。 A thirty-ninth aspect of the exemplary embodiment is the ophthalmological system according to the thirty-eighth aspect, wherein the predetermined region is a region defined by the anterior surface of the cornea and the posterior surface of the crystalline lens.
例示的な実施形態の第40の態様は、第32、34~39の態様のいずれかの眼科システムであって、前記情報処理装置は、前記3次元画像をレンダリングしてレンダリング画像を構築するレンダリング部を含むことを特徴とする。 A 40th aspect of the exemplary embodiment is the ophthalmological system according to any one of the 32nd, 34th to 39th aspects, wherein the information processing device is a rendering device that constructs a rendered image by rendering the three-dimensional image. It is characterized by including a section.
例示的な実施形態の第41の態様は、第40の態様の眼科システムであって、前記3次元画像に対して断面が指定されたとき、前記レンダリング部は、前記3次元画像を当該断面で切断して3次元部分画像を構築することを特徴とする。 A forty-first aspect of the exemplary embodiment is the ophthalmological system according to the fortieth aspect, in which, when a cross section is specified for the three-dimensional image, the rendering unit converts the three-dimensional image into the cross-section. The feature is that three-dimensional partial images are constructed by cutting.
例示的な実施形態の第42の態様は、第40の態様の眼科システムであって、前記3次元画像に対して断面が指定されたとき、前記レンダリング部は、当該断面を表す2次元断面画像を構築することを特徴とする。 A 42nd aspect of the exemplary embodiment is the ophthalmological system according to the 40th aspect, in which when a cross section is specified for the three-dimensional image, the rendering unit generates a two-dimensional cross-sectional image representing the cross section. It is characterized by the construction of
例示的な実施形態の第43の態様は、第40の態様の眼科システムであって、前記3次元画像に対してスライスが指定されたとき、前記レンダリング部は、当該スライスに対応する3次元スライス画像を構築することを特徴とする。 A forty-third aspect of the exemplary embodiment is the ophthalmological system according to the fortieth aspect, in which, when a slice is specified for the three-dimensional image, the rendering unit slices a three-dimensional slice corresponding to the slice. It is characterized by constructing an image.
例示的な実施形態の第44の態様は、第29~43の態様のいずれかの眼科システムであって、前記情報処理装置は、前記照明系の光軸と前記撮影系の光軸とがなす角度である光軸角度に起因する歪みを補正するための処理を、前記複数の画像のうちの少なくとも1つに適用する歪み補正部を含むことを特徴とする。 A forty-fourth aspect of the exemplary embodiment is the ophthalmological system according to any one of the twenty-ninth to forty-third aspects, wherein the information processing device is configured such that an optical axis of the illumination system and an optical axis of the imaging system form The image forming apparatus is characterized in that it includes a distortion correction unit that applies processing for correcting distortion caused by an optical axis angle, which is an angle, to at least one of the plurality of images.
例示的な実施形態の第45の態様は、第44の態様の眼科システムであって、前記撮影系に含まれる前記光学系の光軸は、前記照明系の光軸に対して、前記照明系の光軸に沿う第1方向及び前記スリット光の長手方向に沿う第2方向の双方に直交する第3方向に傾斜して配置されており、前記歪み補正部は、前記第1方向及び前記第2方向の双方を含む平面における歪みを補正するための処理を実行することを特徴とする。 A forty-fifth aspect of the exemplary embodiment is the ophthalmological system according to the forty-fourth aspect, wherein the optical axis of the optical system included in the imaging system is relative to the optical axis of the illumination system. and a second direction along the longitudinal direction of the slit light. It is characterized by executing processing for correcting distortion in a plane including both directions.
例示的な実施形態の第46の態様は、第44又は45の態様の眼科システムであって、前記歪み補正部は、所定の基準角度と前記光軸角度とに基づき設定された補正係数を予め記憶しており、当該補正係数に基づいて前記歪みを補正するための処理を実行することを特徴とする。 A forty-sixth aspect of the exemplary embodiment is the ophthalmological system according to the forty-fourth or forty-fifth aspect, wherein the distortion correction unit presets a correction coefficient set based on a predetermined reference angle and the optical axis angle. It is characterized in that the correction coefficient is stored and a process for correcting the distortion is executed based on the correction coefficient.
例示的な実施形態の第47の態様は、第29~46の態様のいずれかの眼科システムであって、前記情報処理装置は、前記撮影系により取得された前記複数の画像のうちの少なくとも1つを解析することにより所定の計測値を求める第1計測部を含むことを特徴とする。 A forty-seventh aspect of the exemplary embodiment is the ophthalmological system according to any one of the twenty-ninth to forty-sixth aspects, wherein the information processing apparatus includes at least one of the plurality of images acquired by the imaging system. The present invention is characterized in that it includes a first measurement section that obtains a predetermined measurement value by analyzing the first measurement value.
例示的な実施形態の第48の態様は、第32、34~43の態様のいずれかの眼科システムであって、前記情報処理装置は、前記3次元画像構築部により構築された前記3次元画像を解析することにより所定の計測値を求める第2計測部を含むことを特徴とする。 A forty-eighth aspect of the exemplary embodiment is the ophthalmological system according to any one of the thirty-second, thirty-fourth to forty-third aspects, wherein the information processing device is configured to image the three-dimensional image constructed by the three-dimensional image constructing unit. It is characterized in that it includes a second measurement section that obtains a predetermined measurement value by analyzing.
例示的な実施形態の第49の態様は、第29~48の態様のいずれかの眼科システムであって、前記照明系及び前記撮影系は、少なくとも角膜前面及び水晶体後面により画成される部位に前記撮影系のピントが合うように構成されていることを特徴とする。 A forty-ninth aspect of the exemplary embodiment is the ophthalmological system according to any of the twenty-ninth to forty-eighth aspects, wherein the illumination system and the imaging system are arranged in a region defined by at least the anterior surface of the cornea and the posterior surface of the crystalline lens. The camera is characterized in that the photographing system is configured to be in focus.
例示的な実施形態の第50の態様は、第29~49の態様のいずれかの眼科システムであって、前記照明系は、被検者の体軸方向を長手方向とするスリット光を前記前眼部に照射し、前記移動機構は、前記体軸方向に直交する方向に前記照明系及び前記撮影系を移動することを特徴とする。 A fiftieth aspect of the exemplary embodiment is the ophthalmological system according to any one of the twenty-ninth to forty-ninth aspects, wherein the illumination system emits a slit light whose longitudinal direction is in the body axis direction of the subject. The eye is irradiated with the illumination system, and the moving mechanism moves the illumination system and the imaging system in a direction perpendicular to the body axis direction.
例示的な実施形態の第51の態様は、第50の態様の眼科システムであって、前記スリット光の長さは、前記体軸方向における角膜径以上であり、前記移動機構による前記照明系及び前記撮影系の移動距離は、前記体軸方向に直交する方向における角膜径以上であることを特徴とする。 A fifty-first aspect of the exemplary embodiment is the ophthalmological system according to the fiftieth aspect, wherein the length of the slit light is equal to or longer than the corneal diameter in the body axis direction, and the illumination system by the moving mechanism The imaging system is characterized in that a moving distance of the imaging system is equal to or larger than a corneal diameter in a direction perpendicular to the body axis direction.
例示的な実施形態の第52の態様は、第29~51の態様のいずれかの眼科システムであって、前記撮影系に含まれる前記光学系は、前記スリット光が照射されている前記前眼部からの光であって、前記照明系の光軸から離れる方向に進行する光を、前記照明系の光軸に近づく方向に反射する反射器と、前記反射器により反射された前記光を前記撮像面に結像させる1以上のレンズとを含むことを特徴とする。 A 52nd aspect of the exemplary embodiment is the ophthalmological system according to any of the 29th to 51st aspects, wherein the optical system included in the imaging system is configured such that the anterior eye is irradiated with the slit light. a reflector that reflects light from a light source traveling in a direction away from the optical axis of the illumination system in a direction approaching the optical axis of the illumination system; It is characterized by including one or more lenses that form an image on an imaging surface.
例示的な実施形態の第53の態様は、第29~52の態様のいずれかの眼科システムであって、前記スリットランプ顕微鏡は、撮影系による前記複数の画像の取得と並行して前記前眼部を固定位置から動画撮影する動画撮影系を含むことを特徴とする。 A 53rd aspect of the exemplary embodiment is the ophthalmological system according to any of the 29th to 52nd aspects, wherein the slit lamp microscope is configured to operate the anterior eye in parallel with the acquisition of the plurality of images by the imaging system. It is characterized by including a video shooting system that takes videos of the area from a fixed position.
例示的な実施形態の第54の態様は、第53の態様の眼科システムであって、前記スリットランプ顕微鏡は、前記動画撮影系により取得される動画像を解析して前記被検眼の運動を検出する運動検出部を含むことを特徴とする。 A 54th aspect of the exemplary embodiment is the ophthalmological system according to the 53rd aspect, wherein the slit lamp microscope detects the movement of the subject's eye by analyzing a moving image acquired by the video imaging system. It is characterized by including a motion detection section that performs the following.
例示的な実施形態の第55の態様は、第54の態様の眼科システムであって、前記スリットランプ顕微鏡は、前記運動検出部からの出力に基づいて前記移動機構を制御する移動制御部を含むことを特徴とする。 A fifty-fifth aspect of the exemplary embodiment is the ophthalmological system of the fifty-fourth aspect, wherein the slit lamp microscope includes a movement control unit that controls the movement mechanism based on an output from the movement detection unit. It is characterized by
例示的な実施形態によれば、高品質なスリットランプ顕微鏡検査を広く提供することが可能になる。 Exemplary embodiments enable high quality slit lamp microscopy to be widely provided.
例示的な実施形態について、図面を参照しながら詳細に説明する。なお、本明細書にて引用した文献に開示された事項などの任意の公知技術を実施形態に組み合わせることができる。 Exemplary embodiments will be described in detail with reference to the drawings. Note that any known techniques such as those disclosed in the documents cited in this specification can be combined with the embodiments.
実施形態に係るスリットランプ顕微鏡は、例えば、眼鏡店や医療施設に設置されてもよいし、可搬型であってもよい。実施形態に係るスリットランプ顕微鏡は、典型的には、同装置に関する専門技術保持者が側にいない状況や環境で使用される。なお、実施形態に係るスリットランプ顕微鏡は、専門技術保持者が側にいる状況や環境で使用されてもよいし、専門技術保持者が遠隔地から監視、指示、操作することが可能な状況や環境で使用されてもよい。 The slit lamp microscope according to the embodiment may be installed in an eyeglass store or a medical facility, or may be portable. The slit lamp microscope according to the embodiment is typically used in a situation or environment where a person with expertise regarding the device is not on hand. Note that the slit lamp microscope according to the embodiment may be used in a situation or environment where a professional technician is present, or in a situation or environment where a professional technician can monitor, instruct, and operate from a remote location. May be used in the environment.
実施形態に係る眼科システムは、1以上のスリットランプ顕微鏡と、1以上の情報処理装置とを含み、例えば遠隔医療に使用可能である。情報処理装置は、スリットランプ顕微鏡により取得された画像を受けてこれを処理する。情報処理装置は、スリットランプ顕微鏡や他の情報処理装置にデータを送信可能であってよい。情報処理装置の用途は、例えば、画像解析、画像処理、読影などであってよい。 The ophthalmologic system according to the embodiment includes one or more slit lamp microscopes and one or more information processing devices, and can be used for, for example, telemedicine. The information processing device receives and processes images acquired by the slit lamp microscope. The information processing device may be capable of transmitting data to a slit lamp microscope or other information processing device. The information processing device may be used for, for example, image analysis, image processing, image interpretation, etc.
実施形態の眼科システムが遠隔医療に用いられる場合、スリットランプ顕微鏡により取得された画像の読影を、このスリットランプ顕微鏡が設置された施設から離れた遠隔地にいる者が行う。読影者は、典型的には医師であり、スリットランプ顕微鏡に関する専門技術の保持者である。また、情報処理技術(例えば、人工知能、画像解析、画像処理)を利用したコンピュータによる読影支援を採用することも可能である。 When the ophthalmology system of the embodiment is used for telemedicine, a person located at a remote location away from the facility where the slit lamp microscope is installed interprets images acquired by the slit lamp microscope. The image reader is typically a doctor and has expertise in slit lamp microscopy. Furthermore, it is also possible to employ computer-assisted image interpretation using information processing technology (eg, artificial intelligence, image analysis, image processing).
スリットランプ顕微鏡が設置される施設の例として、眼鏡店、オプトメトリスト、医療機関、健康診断会場、検診会場、患者の自宅、福祉施設、公共施設、検診車などがある。 Examples of facilities where slit lamp microscopes are installed include opticians, optometrists, medical institutions, health examination halls, examination halls, patients' homes, welfare facilities, public facilities, and examination vehicles.
実施形態に係るスリットランプ顕微鏡は、少なくともスリットランプ顕微鏡としての機能を有する眼科撮影装置であり、他の撮影機能(モダリティ)を更に備えていてもよい。他のモダリティの例として、眼底カメラ、SLO、OCTなどがある。実施形態に係るスリットランプ顕微鏡は、被検眼の特性を測定する機能を更に備えていてもよい。測定機能の例として、視力測定、屈折測定、眼圧測定、角膜内皮細胞測定、収差測定、視野測定などがある。実施形態に係るスリットランプ顕微鏡は、撮影画像や測定データを解析するためのアプリケーションを更に備えていてもよい。実施形態に係るスリットランプ顕微鏡は、治療や手術のための機能を更に備えていてもよい。その例として光凝固治療や光線力学的療法がある。 The slit lamp microscope according to the embodiment is an ophthalmologic imaging device that has at least a function as a slit lamp microscope, and may further include other imaging functions (modalities). Examples of other modalities include fundus camera, SLO, OCT, etc. The slit lamp microscope according to the embodiment may further include a function of measuring characteristics of the eye to be examined. Examples of measurement functions include visual acuity measurement, refraction measurement, intraocular pressure measurement, corneal endothelial cell measurement, aberration measurement, and visual field measurement. The slit lamp microscope according to the embodiment may further include an application for analyzing captured images and measurement data. The slit lamp microscope according to the embodiment may further include functions for treatment and surgery. Examples include photocoagulation therapy and photodynamic therapy.
以下、様々な例示的な実施形態について説明する。これら実施形態のうちのいずれか2つ又はそれ以上を組み合わせることが可能である。また、これら実施形態のそれぞれ又は2以上の組み合わせに任意の公知技術に基づく変形(付加、置換等)を施すことが可能である。 Various exemplary embodiments are described below. It is possible to combine any two or more of these embodiments. Furthermore, it is possible to make modifications (additions, substitutions, etc.) to each of these embodiments or a combination of two or more thereof based on any known technology.
以下に例示する実施形態において、「プロセッサ」は、例えば、CPU(Central Processing Unit)、GPU(Graphics Processing Unit)、ASIC(Application Specific Integrated Circuit)、プログラマブル論理デバイス(例えば、SPLD(Simple Programmable Logic Device)、CPLD(Complex Programmable Logic Device)、FPGA(Field Programmable Gate Array))等の回路を意味する。プロセッサは、例えば、記憶回路や記憶装置に格納されているプログラムやデータを読み出し実行することで、その実施形態に係る機能を実現する。 In the embodiments illustrated below, a "processor" may be, for example, a CPU (Central Processing Unit), a GPU (Graphics Processing Unit), an ASIC (Application Specific Integrated Circuit), or a programmable logic. device (for example, SPLD (Simple Programmable Logic Device) , CPLD (Complex Programmable Logic Device), FPGA (Field Programmable Gate Array), and other circuits. The processor realizes the functions according to the embodiment by, for example, reading and executing programs and data stored in a storage circuit or a storage device.
〈第1実施形態〉
第1実施形態に係るスリットランプ顕微鏡の例を図1に示す。
<First embodiment>
FIG. 1 shows an example of a slit lamp microscope according to the first embodiment.
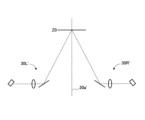
スリットランプ顕微鏡1は、被検眼Eの前眼部撮影に用いられ、照明系2と、撮影系3と、移動機構6と、制御部7と、データ処理部8と、通信部9とを含む。なお、符号Cは角膜を示し、符号CLは水晶体を示す。
The
スリットランプ顕微鏡1は、単一の装置であってもよいし、2以上の装置を含むシステムであってもよい。後者の例として、スリットランプ顕微鏡1は、照明系2、撮影系3、及び移動機構6を含む本体装置と、制御部7、データ処理部8、及び通信部9を含むコンピュータと、本体装置とコンピュータとの間の通信を担う通信デバイスとを含む。コンピュータは、例えば、本体装置とともに設置されてもよいし、ネットワーク上に設置されていてもよい。
The
[照明系2]
照明系2は、被検眼Eの前眼部にスリット光を照射する。符号2aは、照明系2の光軸(照明光軸)を示す。照明系2は、従来のスリットランプ顕微鏡の照明系と同様の構成を備えていてよい。例えば、図示は省略するが、照明系2は、被検眼Eから遠い側から順に、照明光源と、正レンズと、スリット形成部と、対物レンズとを含む。
[Lighting system 2]
The
照明光源は照明光を出力する。照明系2は複数の照明光源を備えていてよい。例えば、照明系2は、連続光を出力する照明光源と、フラッシュ光を出力する照明光源とを含んでいてよい。また、照明系2は、前眼部用照明光源と後眼部用照明光源とを含んでいてよい。また、照明系2は、出力波長が異なる2以上の照明光源を含んでいてよい。典型的な照明系2は、照明光源として可視光源を含む。照明系2は、赤外光源を含んでいてもよい。照明光源から出力された照明光は、正レンズを通過してスリット形成部に投射される。
The illumination light source outputs illumination light. The
スリット形成部は、照明光の一部を通過させてスリット光を生成する。典型的なスリット形成部は、一対のスリット刃を有する。これらスリット刃の間隔(スリット幅)を変更することで照明光が通過する領域(スリット)の幅を変更し、これによりスリット光の幅が変更される。また、スリット形成部は、スリット光の長さを変更可能に構成されてもよい。スリット光の長さとは、スリット幅に対応するスリット光の断面幅方向に直交する方向におけるスリット光の断面寸法である。スリット光の幅やスリット光の長さは、典型的には、スリット光の前眼部への投影像の寸法として表現される。 The slit forming section allows part of the illumination light to pass through and generates slit light. A typical slit forming section has a pair of slit blades. By changing the interval between these slit blades (slit width), the width of the area (slit) through which the illumination light passes is changed, thereby changing the width of the slit light. Further, the slit forming section may be configured to be able to change the length of the slit light. The length of the slit light is the cross-sectional dimension of the slit light in a direction perpendicular to the cross-sectional width direction of the slit light corresponding to the slit width. The width of the slit light and the length of the slit light are typically expressed as dimensions of an image projected onto the anterior segment of the eye by the slit light.
スリット形成部により生成されたスリット光は、対物レンズにより屈折されて被検眼Eの前眼部に照射される。 The slit light generated by the slit forming section is refracted by the objective lens and irradiated onto the anterior segment of the eye E to be examined.
照明系2は、スリット光のフォーカス位置を変更するための合焦機構を更に含んでいてもよい。合焦機構は、例えば、対物レンズを照明光軸2aに沿って移動させる。対物レンズの移動は、自動及び/又は手動で実行可能である。なお、対物レンズとスリット形成部との間の照明光軸2a上の位置に合焦レンズを配置し、この合焦レンズを照明光軸2aに沿って移動させることによってスリット光のフォーカス位置を変更可能としてもよい。
The
なお、図1は上面図であり、同図に示すように、本実施形態では、被検眼Eの軸に沿う方向をZ方向とし、これに直交する方向のうち被検者にとって左右の方向をX方向とし、X方向及びZ方向の双方に直交する方向をY方向とする。典型的には、X方向は左眼と右眼との配列方向であり、Y方向は被検者の体軸に沿う方向(体軸方向)である。また、本実施形態では、照明光軸2aが被検眼Eの軸に一致するように、より広義には、照明光軸2aが被検眼Eの軸に平行に配置されるようにスリットランプ顕微鏡1のアライメントが実行される。アライメントについては後述する。
Note that FIG. 1 is a top view, and as shown in the figure, in this embodiment, the direction along the axis of the eye E to be examined is defined as the Z direction, and among the directions orthogonal to this, the left and right directions for the examinee are The X direction is defined as the X direction, and the direction orthogonal to both the X direction and the Z direction is defined as the Y direction. Typically, the X direction is the direction in which the left eye and the right eye are arranged, and the Y direction is the direction along the body axis of the subject (body axis direction). In the present embodiment, the
[撮影系3]
撮影系3は、照明系2からのスリット光が照射されている前眼部を撮影する。符号3aは、撮影系3の光軸(撮影光軸)を示す。本実施形態の撮影系3は、光学系4と、撮像素子5とを含む。
[Photography system 3]
The
光学系4は、スリット光が照射されている被検眼Eの前眼部からの光を撮像素子5に導く。撮像素子5は、光学系4により導かれた光を撮像面にて受光する。
The optical system 4 guides light from the anterior segment of the eye E to be examined, which is irradiated with the slit light, to the
光学系4により導かれる光(つまり、被検眼Eの前眼部からの光)は、前眼部に照射されているスリット光の戻り光を含み、他の光を更に含んでいてよい。戻り光の例として、反射光、散乱光、蛍光がある。他の光の例として、スリットランプ顕微鏡1の設置環境からの光(室内光、太陽光など)がある。前眼部全体を照明するための前眼部照明系が照明系2とは別に設けられている場合、この前眼部照明光の戻り光が、光学系4により導かれる光に含まれてもよい。
The light guided by the optical system 4 (that is, the light from the anterior segment of the subject's eye E) includes the return light of the slit light irradiating the anterior segment, and may further include other light. Examples of returned light include reflected light, scattered light, and fluorescence. Examples of other light include light from the installation environment of the slit lamp microscope 1 (indoor light, sunlight, etc.). If the anterior ocular segment illumination system for illuminating the entire anterior ocular segment is provided separately from the
撮像素子5は、2次元の撮像エリアを有するエリアセンサであり、例えば、電荷結合素子(CCD)イメージセンサや相補型金属酸化膜半導体(CMOS)イメージセンサであってよい。
The
光学系4は、例えば、従来のスリットランプ顕微鏡の撮影系と同様の構成を備えていてよい。例えば、光学系4は、被検眼Eに近い側から順に、対物レンズと、変倍光学系と、結像レンズとを含む。スリット光が照射されている被検眼Eの前眼部からの光は、対物レンズ及び変倍光学系を通過し、結像レンズにより撮像素子5の撮像面に結像される。
The optical system 4 may have, for example, a configuration similar to the imaging system of a conventional slit lamp microscope. For example, the optical system 4 includes, in order from the side closest to the eye E to be examined, an objective lens, a variable power optical system, and an imaging lens. Light from the anterior segment of the subject's eye E, which is irradiated with the slit light, passes through the objective lens and variable magnification optical system, and is imaged on the imaging surface of the
撮影系3は、例えば、第1撮影系と第2撮影系とを含んでいてよい。典型的には、第1撮影系と第2撮影系とは同じ構成を有する。撮影系3が第1撮影系と第2撮影系とを含む場合については他の実施形態において説明する。
The
撮影系3は、そのフォーカス位置を変更するための合焦機構を更に含んでいてもよい。合焦機構は、例えば、対物レンズを撮影光軸3aに沿って移動させる。対物レンズの移動は、自動及び/又は手動で実行可能である。なお、対物レンズと結像レンズとの間の撮影光軸3a上の位置に合焦レンズを配置し、この合焦レンズを撮影光軸3aに沿って移動させることによってフォーカス位置を変更可能としてもよい。
The photographing
照明系2及び撮影系3は、シャインプルーフカメラとして機能する。すなわち、照明光軸2aに沿う物面と、光学系4と、撮像素子5の撮像面とが、いわゆるシャインプルーフの条件を満足するように、照明系2及び撮影系3が構成される。より具体的には、照明光軸2aを通るYZ面(物面を含む)と、光学系4の主面と、撮像素子5の撮像面とが、同一の直線上にて交差する。これにより、物面内の全ての位置(照明光軸2aに沿う方向における全ての位置)にピントを合わせて撮影を行うことができる。
The
本実施形態では、少なくとも角膜Cの前面及び水晶体CLの後面により画成される部位に撮影系3のピントが合うように、照明系2及び撮影系3が構成される。つまり、図1に示す角膜Cの前面の頂点(Z=Z1)から水晶体CLの後面の頂点(Z=Z2)までの範囲全体に撮影系3のピントが合っている状態で、撮影を行うことが可能である。なお、Z=Z0は、照明光軸2aと撮影光軸3aとの交点のZ座標を示す。
In this embodiment, the
このような条件は、典型的には、照明系2に含まれる要素の構成及び配置、撮影系3に含まれる要素の構成及び配置、並びに、照明系2と撮影系3との相対位置によって実現される。照明系2と撮影系3との相対位置を示すパラメータは、例えば、照明光軸2aと撮影光軸3aとがなす角度θを含む。角度θは、例えば、17.5度、30度、又は45度に設定される。なお、角度θは可変であってもよい。
Such conditions are typically realized by the configuration and arrangement of elements included in
[移動機構6]
移動機構6は、照明系2及び撮影系3を移動する。本実施形態において、移動機構6は、照明系2及び撮影系3を一体的にX方向に移動する。
[Moving mechanism 6]
The moving
例えば、移動機構6は、照明系2及び撮影系3が搭載された可動ステージと、制御部7から入力される制御信号にしたがって動作するアクチュエータと、このアクチュエータにより発生された駆動力に基づき可動ステージを移動する機構とを含む。他の例において、移動機構6は、照明系2及び撮影系3が搭載された可動ステージと、図示しない操作デバイスに印加された力に基づき可動ステージを移動する機構とを含む。操作デバイスは、例えばレバーである。可動ステージは、少なくともX方向に移動可能であり、更にY方向及び/又はZ方向に移動可能であってよい。
For example, the moving
[制御部7]
制御部7は、スリットランプ顕微鏡1の各部を制御する。例えば、制御部7は、照明系2の要素(照明光源、スリット形成部、合焦機構など)、撮影系3の要素(合焦機構、撮像素子など)、移動機構6、データ処理部8、通信部9などを制御する。また、制御部7は、照明系2と撮影系3との相対位置を変更するための制御を実行可能であってもよい。
[Control unit 7]
The
制御部7は、プロセッサ、主記憶装置、補助記憶装置などを含む。補助記憶装置には、制御プログラム等が記憶されている。制御プログラム等は、スリットランプ顕微鏡1がアクセス可能なコンピュータや記憶装置に記憶されていてもよい。制御部7の機能は、制御プログラム等のソフトウェアと、プロセッサ等のハードウェアとの協働によって実現される。
The
制御部7は、被検眼Eの前眼部の3次元領域をスリット光でスキャンするために、照明系2、撮影系3及び移動機構6に対して次のような制御を適用することができる。
The
まず、制御部7は、照明系2及び撮影系3を所定のスキャン開始位置に配置するように移動機構6を制御する(アライメント制御)。スキャン開始位置は、例えば、X方向における角膜Cの端部(第1端部)に相当する位置、又は、それよりも被検眼Eの軸から離れた位置である。図2Aにおける符号X0は、X方向における角膜Cの第1端部に相当するスキャン開始位置を示している。また、図2Bの符号X0’は、X方向における角膜Cの第1端部に相当する位置よりも被検眼Eの軸EAから離れたスキャン開始位置を示している。
First, the
制御部7は、照明系2を制御して、被検眼Eの前眼部に対するスリット光の照射を開始させる(スリット光照射制御)。なお、アライメント制御の実行前に、又は、アライメント制御の実行中に、スリット光照射制御を行ってもよい。照明系2は、典型的には連続光をスリット光として照射するが、断続光(パルス光)をスリット光として照射してもよい。また、照明系2は、典型的には可視光をスリット光として照射するが、赤外光をスリット光として照射してもよい。
The
制御部7は、撮影系3を制御して、被検眼Eの前眼部の動画撮影を開始させる(撮影制御)。なお、アライメント制御の実行前に、又は、アライメント制御の実行中に、撮影制御を行ってもよい。典型的には、スリット光照射制御と同時に、又は、スリット光照射制御よりも後に、撮影制御が実行される。
The
アライメント制御、スリット光照射制御、及び撮影制御の実行後、制御部7は、移動機構6を制御して、照明系2及び撮影系3の移動を開始する(移動制御)。移動制御により、照明系2及び撮影系3が一体的に移動される。つまり、照明系2と撮影系3との相対位置(角度θなど)を維持しつつ照明系2及び撮影系3が移動される。照明系2及び撮影系3の移動は、前述したスキャン開始位置から所定のスキャン終了位置まで行われる。スキャン終了位置は、例えば、スキャン開始位置と同様に、X方向において第1端部の反対側の角膜Cの端部(第2端部)に相当する位置、又は、それよりも被検眼Eの軸から離れた位置である。このような場合、スキャン開始位置からスキャン終了位置までの範囲がスキャン範囲となる。
After executing the alignment control, slit light irradiation control, and photographing control, the
典型的には、X方向を幅方向とし且つY方向を長手方向とするスリット光を前眼部に照射しつつ、且つ、照明系2及び撮影系3をX方向に移動しつつ、撮影系3による動画撮影が実行される。
Typically, the
ここで、スリット光の長さ(つまり、Y方向におけるスリット光の寸法)は、例えば、被検眼Eの表面において角膜Cの径以上に設定されている。すなわち、スリット光の長さは、Y方向における角膜径以上に設定されている。また、前述のように、移動機構6による照明系2及び撮影系3の移動距離(つまり、スキャン範囲)は、X方向における角膜径以上に設定されている。これにより、少なくとも角膜C全体をスリット光でスキャンすることができる。
Here, the length of the slit light (that is, the dimension of the slit light in the Y direction) is set, for example, to be greater than or equal to the diameter of the cornea C on the surface of the eye E to be examined. That is, the length of the slit light is set to be longer than the corneal diameter in the Y direction. Further, as described above, the moving distance (that is, the scanning range) of the
このようなスキャンにより、スリット光の照射位置が異なる複数の前眼部画像が得られる。換言すると、スリット光の照射位置がX方向に移動する様が描写された動画像が得られる。このような複数の前眼部画像(つまり、動画像を構成するフレーム群)の例を図3に示す。 Through such scanning, a plurality of anterior segment images with different slit light irradiation positions are obtained. In other words, a moving image is obtained in which the irradiation position of the slit light is depicted moving in the X direction. FIG. 3 shows an example of such a plurality of anterior segment images (that is, a group of frames constituting a moving image).
図3は、複数の前眼部画像(フレーム群)F1、F2、F3、・・・、FNを示す。これら前眼部画像Fn(n=1、2、・・・、N)の添字nは、時系列順序を表している。つまり、第n番目に取得された前眼部画像が符号Fnで表される。前眼部画像Fnには、スリット光照射領域Anが含まれている。図3に示すように、スリット光照射領域A1、A2、A3、・・・、ANは、時系列に沿って右方向に移動している。図3に示す例では、スキャン開始位置及びスキャン終了位置は、X方向における角膜Cの両端に対応する。なお、スキャン開始位置及び/又はスキャン終了位置は本例に限定されず、例えば、角膜端部よりも被検眼Eの軸から離れた位置であってよい。また、スキャンの向きや回数についても任意に設定することが可能である。 FIG. 3 shows a plurality of anterior segment images (frame groups) F1, F2, F3, . . . , FN. The subscript n of these anterior segment images Fn (n=1, 2, . . . , N) represents the chronological order. That is, the nth acquired anterior segment image is represented by the symbol Fn. The anterior segment image Fn includes a slit light irradiation area An. As shown in FIG. 3, the slit light irradiation areas A1, A2, A3, . . . , AN are moving to the right in time series. In the example shown in FIG. 3, the scan start position and scan end position correspond to both ends of the cornea C in the X direction. Note that the scan start position and/or scan end position is not limited to this example, and may be, for example, a position farther from the axis of the eye E than the corneal end. Furthermore, the direction and number of scans can be arbitrarily set.
[データ処理部8]
データ処理部8は、各種のデータ処理を実行する。処理されるデータは、スリットランプ顕微鏡1により取得されたデータ、及び、外部から入力されたデータのいずれでもよい。例えば、データ処理部8は、照明系2及び撮影系3によって取得された画像を処理することができる。なお、データ処理部8の構成や機能については他の実施形態において説明する。
[Data processing section 8]
The
データ処理部8は、プロセッサ、主記憶装置、補助記憶装置などを含む。補助記憶装置には、データ処理プログラム等が記憶されている。データ処理プログラム等は、スリットランプ顕微鏡1がアクセス可能なコンピュータや記憶装置に記憶されていてもよい。データ処理部8の機能は、データ処理プログラム等のソフトウェアと、プロセッサ等のハードウェアとの協働によって実現される。
The
[通信部9]
通信部9は、スリットランプ顕微鏡1と他の装置との間におけるデータ通信を行う。すなわち、通信部9は、他の装置へのデータの送信と、他の装置から送信されたデータの受信とを行う。
[Communication Department 9]
The
通信部9が実行するデータ通信の方式は任意である。例えば、通信部9は、インターネットに準拠した通信インターフェイス、専用線に準拠した通信インターフェイス、LANに準拠した通信インターフェイス、近距離通信に準拠した通信インターフェイスなど、各種の通信インターフェイスのうちの1以上を含む。データ通信は有線通信でも無線通信でもよい。
The data communication method executed by the
通信部9により送受信されるデータは暗号化されていてよい。その場合、例えば、制御部7及び/又はデータ処理部8は、通信部9により送信されるデータを暗号化する暗号化処理部、及び、通信部9により受信されたデータを復号化する復号化処理部の少なくとも一方を含む。
Data sent and received by the
[他の要素]
図1に示す要素に加え、スリットランプ顕微鏡1は、表示デバイスや操作デバイスを備えていてよい。或いは、表示デバイスや操作デバイスは、スリットランプ顕微鏡1の周辺機器であってもよい。
[Other elements]
In addition to the elements shown in FIG. 1, the
表示デバイスは、制御部7の制御を受けて各種の情報を表示する。表示デバイスは、液晶ディスプレイ(LCD)などのフラットパネルディスプレイを含んでいてよい。
The display device displays various information under the control of the
操作デバイスは、スリットランプ顕微鏡1を操作するためのデバイスや、情報を入力するためのデバイスを含む。操作デバイスは、例えば、ボタン、スイッチ、レバー、ダイアル、ハンドル、ノブ、マウス、キーボード、トラックボール、操作パネルなどを含む。
The operation device includes a device for operating the
タッチスクリーンのように、表示デバイスと操作デバイスとが一体化したデバイスを用いてもよい。 A device in which a display device and an operation device are integrated, such as a touch screen, may also be used.
被検者や補助者は、表示デバイス及び操作デバイスを用いることで、スリットランプ顕微鏡1の操作を行うことができる。
The subject or the assistant can operate the
[アライメント]
被検眼Eに対するスリットランプ顕微鏡1のアライメントについて説明する。一般に、アライメントは、被検眼Eの撮影や測定のために好適な位置に装置光学系を配置させる動作である。本実施形態のアライメントは、図3に示すような動画像を取得するために好適な位置に照明系2及び撮影系3を配置させる動作である。
[alignment]
The alignment of the
眼科装置のアライメントには様々な手法がある。以下、幾つかのアライメント手法を例示するが、本実施形態に適用可能な手法はこれらに限定されない。 There are various techniques for aligning ophthalmic devices. Although some alignment methods will be illustrated below, the methods applicable to this embodiment are not limited to these.
本実施形態に適用可能なアライメント手法としてステレオアライメントがある。ステレオアライメントは、2以上の異なる方向から前眼部を撮影可能な眼科装置において適用可能であり、その具体的な手法は、本出願人による特開2013-248376号公報などに開示されている。ステレオアライメントは、例えば次の工程を含む:2以上の前眼部カメラが前眼部を異なる方向から撮影して2以上の撮影画像を取得する工程;プロセッサがこれら撮影画像を解析して被検眼の3次元位置を求める工程;求められた3次元位置に基づいてプロセッサが光学系の移動制御を行う工程。これにより、光学系(本例では照明系2及び撮影系3)が、被検眼に対して好適な位置に配置される。典型的なステレオアライメントでは、被検眼の瞳孔(瞳孔の中心又は重心)の位置が基準とされる。
Stereo alignment is an alignment method applicable to this embodiment. Stereo alignment can be applied to an ophthalmological apparatus that can image the anterior segment of the eye from two or more different directions, and a specific method thereof is disclosed in Japanese Patent Application Laid-Open No. 2013-248376 by the present applicant. Stereo alignment includes, for example, the following steps: a step in which two or more anterior segment cameras capture images of the anterior segment from different directions to obtain two or more captured images; a processor analyzes these captured images and identifies the subject's eye. a step in which the processor controls the movement of the optical system based on the determined three-dimensional position; Thereby, the optical system (in this example, the
このようなステレオアライメントの他にも、アライメント光により得られるプルキンエ像を利用した手法や、光テコを利用した手法など、任意の公知のアライメント手法を採用することが可能である。プルキンエ像を利用した手法や光テコを利用した手法では、被検眼の角膜頂点の位置が基準とされる。 In addition to such stereo alignment, it is possible to employ any known alignment method, such as a method using a Purkinje image obtained by alignment light or a method using an optical lever. In the method using a Purkinje image or the method using an optical lever, the position of the corneal vertex of the eye to be examined is used as a reference.
なお、以上の例示を含む従来の典型的なアライメント手法は、被検眼の軸と光学系の光軸とを一致させることを目的として行われるが、本実施形態では、スキャン開始位置に対応する位置に照明系2及び撮影系3を配置させるようにアライメントを実行することが可能である。
Note that typical conventional alignment methods including the above examples are performed with the aim of aligning the axis of the eye to be examined with the optical axis of the optical system, but in this embodiment, It is possible to perform alignment so that the
本実施形態におけるアライメントの第1の例として、上記したアライメント手法のいずれかを適用して被検眼Eの瞳孔又は角膜頂点を基準としたアライメントを行った後、予め設定された角膜半径の標準値に相当する距離だけ照明系2及び撮影系3を(X方向に)移動することができる。なお、標準値を用いる代わりに、被検眼Eの角膜半径の測定値を用いてもよい。
As a first example of alignment in this embodiment, after performing alignment using the pupil or corneal apex of the eye E as a reference by applying any of the alignment methods described above, a preset standard value of the corneal radius is applied. The
第2の例として、上記したアライメント手法のいずれかを適用して被検眼Eの瞳孔又は角膜頂点を基準としたアライメントを行った後、被検眼Eの前眼部の画像を解析して角膜半径を測定し、この測定値に相当する距離だけ照明系2及び撮影系3を(X方向に)移動することができる。本例で解析される前眼部の画像は、例えば、撮影系3により得られた前眼部画像、又は、他の画像である。他の画像は、前眼部カメラにより得られた画像、前眼部OCTにより得られた画像など、任意の画像であってよい。
As a second example, after performing alignment based on the pupil or corneal vertex of the eye E by applying one of the alignment methods described above, the corneal radius is determined by analyzing the image of the anterior segment of the eye E. can be measured, and the
第3の例として、ステレオアライメント用の前眼部カメラ又は撮影系3により得られた前眼部の画像を解析して角膜の第1端部を求め、ステレオアライメントを適用してこの第1端部に対応する位置に照明系2及び撮影系3を移動することができる。
As a third example, the first end of the cornea is determined by analyzing the image of the anterior eye obtained by the anterior eye camera or
なお、上記したアライメント手法のいずれかを適用して被検眼Eの瞳孔又は角膜頂点を基準としたアライメントを実行し、これにより決定された位置からスリット光による前眼部スキャンを開始するようにしてもよい。この場合においても、角膜Cの全体をスキャンするようにスキャンシーケンスを設定することができる。例えば、当該アライメントにより決定された位置から左方にスキャンを行った後、右方にスキャンを行うように、スキャンシーケンスが設定される。 Note that alignment is performed using the pupil or corneal apex of the eye E to be examined as a reference by applying one of the above alignment methods, and the anterior segment scan using the slit light is started from the position determined thereby. Good too. Even in this case, the scan sequence can be set to scan the entire cornea C. For example, a scan sequence is set such that a scan is performed to the left and then to the right from the position determined by the alignment.
[その他の事項]
スリットランプ顕微鏡1は、被検眼Eを固視させるための光(固視光)を出力する固視系を備えていてよい。固視系は、典型的には、少なくとも1つの可視光源(固視光源)、又は、風景チャートや固視標等の画像を表示する表示デバイスを含む。固視系は、例えば、照明系2又は撮影系3と同軸又は非同軸に配置される。
[Other matters]
The
スリットランプ顕微鏡1により取得可能な画像の種別は、前述した前眼部の動画像(複数の前眼部画像)に限定されない。例えば、スリットランプ顕微鏡1は、この動画像に基づく3次元画像、この3次元画像に基づくレンダリング画像、徹照像、被検眼に装用されたコンタクトレンズの動きを表す動画像、蛍光剤適用によるコンタクトレンズと角膜表面との隙間を表す画像などがある。レンダリング画像については他の実施形態において説明する。徹照像は、照明光の網膜反射を利用して眼内の混濁や異物を描出する徹照法により得られる画像である。なお、眼底撮影、角膜内皮細胞撮影、マイボーム腺撮影などが可能であってもよい。
The types of images that can be acquired by the
[使用形態]
スリットランプ顕微鏡1(これを含むシステム)の使用形態を説明する。図4は使用形態の例を示す。
[Usage form]
A usage pattern of the slit lamp microscope 1 (a system including the same) will be explained. FIG. 4 shows an example of usage.
図示は省略するが、任意の段階で、被検者又は補助者は、スリットランプ顕微鏡1に被検者情報を入力する。入力された被検者情報は、制御部7に保存される。被検者情報は、典型的には、被検者の識別情報(被検者ID)を含む。
Although not shown, the subject or the assistant inputs subject information into the
更に、背景情報の入力を行うことができる。背景情報は、被検者に関する任意の情報であって、その例として、被検者の問診情報、所定のシートに被検者が記入した情報、被検者の電子カルテに記録された情報などがある。典型的には、背景情報は、性別、年齢、身長、体重、疾患名、候補疾患名、検査結果(視力値、眼屈折力値、眼圧値など)、屈折矯正具(眼鏡、コンタクトレンズなど)の装用歴や度数、検査歴、治療歴などがある。これらは例示であって、背景情報はこれらに限定されない。 Additionally, background information can be entered. Background information is any information about the examinee, such as interview information of the examinee, information written by the examinee on a prescribed sheet, information recorded in the examinee's electronic medical record, etc. There is. Typically, background information includes gender, age, height, weight, disease name, candidate disease name, test results (visual acuity value, eye refractive power value, intraocular pressure value, etc.), refractive correction equipment (glasses, contact lenses, etc.) ) wearing history, frequency, examination history, treatment history, etc. These are examples, and the background information is not limited to these.
(S1:テーブル、イス、顎受け台を調整)
まず、スリットランプ顕微鏡1が設置されているテーブル、被検者が座るイス、スリットランプ顕微鏡1の顎受け台の調整が行われる(いずれも図示を省略する)。例えば、テーブル、イス、顎受け台の高さ調整が行われる。これらの調整は、例えば、被検者自身によって行われる。或いは、補助者がこれら調整のいずれかを行ってもよい。なお、顎受け台には、被検者の顔を安定配置させるための顎受け部及び額当てが設けられている。
(S1: Adjust table, chair, chin rest)
First, the table on which the
(S2:撮影開始を指示)
ステップS1の調整が完了したら、被検者は、イスに腰掛け、顎受けに顎を載せ、額当てに額を当接させる。これらの動作の前又は後に、被検者又は補助者は、被検眼の撮影開始の指示操作を行う。この操作は、例えば、図示しない撮影開始トリガーボタンの押下である。
(S2: Instruct to start shooting)
When the adjustment in step S1 is completed, the subject sits on a chair, rests his chin on the chin rest, and touches his forehead on the forehead rest. Before or after these operations, the subject or the assistant performs an instruction operation to start photographing the subject's eye. This operation is, for example, pressing a shooting start trigger button (not shown).
(S3:アライメント)
ステップS2の指示を受けて、スリットランプ顕微鏡1は、前述した要領で、被検眼Eに対するアライメントを行う。アライメントの完了後にフォーカス調整を行うようにしてもよい。
(S3: Alignment)
Upon receiving the instruction in step S2, the
(S4:前眼部をスキャン)
スリットランプ顕微鏡1は、前述した要領で、照明系2によるスリット光の照射と、撮影系3による動画撮影と、移動機構6による照明系2及び撮影系3の移動とを組み合わせることで、被検眼Eの前眼部をスキャンする。これにより、例えば、図3に示す複数の前眼部画像F1~FNが得られる。
(S4: Scan the anterior segment)
As described above, the
データ処理部8は、前眼部画像F1~FNの少なくともいずれかを処理することができる。例えば、他の実施形態で説明するように、データ処理部8は、前眼部画像F1~FNに基づいて3次元画像を構築することができる。また、所定の画像処理や所定の画像解析を行うことも可能である。
The
(S5:画像を送信)
制御部7は、通信部9を制御して、スリットランプ顕微鏡1により取得された前眼部の画像(前眼部画像F1~FN、前眼部画像F1~FNの一部、前眼部画像F1~FNに基づく3次元画像など)を他の装置に送信する。
(S5: Send image)
The
他の装置の例として情報処理装置や記憶装置がある。情報処理装置は、例えば、広域回線上のサーバ、LAN上のサーバ、コンピュータ端末などである。記憶装置は、広域回線上に設けられた記憶装置、LAN上に設けられた記憶装置などである。 Examples of other devices include information processing devices and storage devices. The information processing device is, for example, a server on a wide area line, a server on a LAN, a computer terminal, or the like. The storage device is a storage device provided on a wide area line, a storage device provided on a LAN, or the like.
前眼部の画像とともに背景情報を送信することができる。また、前眼部の画像とともに被検者の識別情報が送信される。この識別情報は、スリットランプ顕微鏡1に入力された被検者ID(前述)でもよいし、被検者IDに基づき生成された識別情報でもよい。後者の例として、スリットランプ顕微鏡1が設置されている施設内での個人識別に用いられる被検者ID(内部識別情報)を、当該施設外にて用いられる外部識別情報に変換することができる。これにより、前眼部の画像や背景情報などの個人情報に関する情報セキュリティの向上を図ることが可能である。
Background information can be sent along with the anterior segment image. In addition, identification information of the subject is transmitted together with the image of the anterior segment of the eye. This identification information may be the subject ID (described above) input into the
(S6:観察及び診断)
ステップS5でスリットランプ顕微鏡1から送信された被検眼Eの前眼部の画像(及び、被検者の識別情報、背景情報など)は、直接的又は間接的に、例えば医師(又はオプトメトリスト)が使用する情報処理装置に送られる。
(S6: Observation and diagnosis)
The image of the anterior segment of the subject's eye E (and the subject's identification information, background information, etc.) transmitted from the
医師(又はオプトメトリスト)は、被検眼Eの前眼部の画像を観察することができる。このとき、例えば、前眼部画像F1~FNを所定数枚ずつ表示させることや、前眼部画像F1~FNを一覧表示することや、前眼部画像F1~FNをスライドショー表示することや、前眼部画像F1~FNから3次元画像を構築することや、3次元画像のレンダリング画像を表示することが可能である。 A doctor (or optometrist) can observe an image of the anterior segment of the eye E to be examined. At this time, for example, displaying a predetermined number of anterior segment images F1 to FN, displaying a list of anterior segment images F1 to FN, displaying a slide show of anterior segment images F1 to FN, It is possible to construct a three-dimensional image from the anterior segment images F1 to FN and to display a rendered image of the three-dimensional image.
医師(又はオプトメトリスト)は、被検眼Eの前眼部の画像を観察することで画像診断(読影)を行うことができる。医師(又はオプトメトリスト)は、読影で得た情報が記録されたレポートを作成することができる。レポートは、例えば、スリットランプ顕微鏡1が設置されている施設に送信される。或いは、被検者が登録したアドレス情報(電子メールアドレス、住所など)にレポートを送信してもよい。以上で、本例に係る処理は終了となる。
A doctor (or optometrist) can perform image diagnosis (image interpretation) by observing an image of the anterior segment of the eye E to be examined. A doctor (or optometrist) can create a report in which information obtained from image interpretation is recorded. The report is sent, for example, to the facility where the
[効果]
本実施形態により奏される効果を説明する。
[effect]
The effects achieved by this embodiment will be explained.
スリットランプ顕微鏡1は、照明系2と、撮影系3と、移動機構6とを含む。照明系2は、被検眼Eの前眼部にスリット光を照射する。撮影系3は、スリット光が照射されている前眼部からの光を導く光学系4と、光学系4により導かれた光を撮像面で受光する撮像素子5とを含む。移動機構6は、照明系2及び撮影系3を移動する。
The
照明系2の光軸(照明光軸)2aに沿う物面と、光学系4と、撮像素子5の撮像面とが、シャインプルーフの条件を満足するように、照明系2及び撮影系3が構成されている。
The
撮影系3は、移動機構6による照明系2及び撮影系3の移動と並行して繰り返し撮影を行うことにより、被検眼Eの前眼部の複数の画像を取得する。典型的には、この繰り返し撮影は動画撮影であり、それにより、複数の前眼部画像からなる動画像が取得される。
The
このようなスリットランプ顕微鏡1によれば、照明系2及び撮影系3を移動することにより、被検眼Eの前眼部の3次元領域をスリット光でスキャンすることができ、当該3次元領域を表す画像を取得することができる。したがって、医師やオプトメトリストは、スリットランプ顕微鏡1によって取得された画像を観察して前眼部の所望の部位の状態を把握することが可能である。
According to such a
また、スリットランプ顕微鏡1により取得された画像を、遠隔地にいる医師やオプトメトリストに提供することができる。典型的には、スリットランプ顕微鏡1は、通信部9により、被検眼Eの前眼部について取得された画像を、医師やオプトメトリストが使用する情報処理装置に向けて送信することができる。なお、通信部9を設けることは任意的である。スリットランプ顕微鏡1により取得された画像の提供方法は、このようなデータ通信に限定されず、画像が記録された記録媒体や印刷媒体を提供するなどの方法であってもよい。記録媒体への記録は当該記録媒体に準拠した記録デバイス(データライタ)により行われ、印刷媒体への記録は印刷装置により行われる。
Furthermore, images acquired by the
また、スリットランプ顕微鏡1は、照明光軸2aに沿う物面と光学系4と撮像素子5の撮像面とがシャインプルーフの条件を満足するように構成されているので、深さ方向(Z方向)の広い範囲にピントを合わせることが可能である。例えば、照明系2及び撮影系3は、少なくとも角膜前面及び水晶体後面により画成される部位に撮影系3のピントが合うように構成される。これにより、スリットランプ顕微鏡検査の対象となる前眼部の主要な部位の全体を高精細に画像化することが可能になる。なお、ピントが合う範囲は、角膜前面及び水晶体後面により画成される領域に限定されず、任意に設定可能である。
Furthermore, the
シャインプルーフの条件を満足しない構成が適用される場合において、深さ方向の広い範囲にピントを合わせて3次元領域を撮影するには、前眼部の各箇所にピントを合わせつつ、角膜前面の形状に応じた曲線状の経路に沿って照明系及び撮影系を移動させる必要があるが、このような操作や制御は煩雑であり、実用的とは言えない。 When a configuration that does not satisfy the Scheimpflug conditions is applied, in order to focus on a wide range in the depth direction and photograph a three-dimensional area, it is necessary to Although it is necessary to move the illumination system and the imaging system along a curved path depending on the shape, such operations and controls are complicated and cannot be said to be practical.
また、照明系2は、被検者の体軸方向(Y方向)を長手方向とするスリット光を前眼部に照射されていてよい。更に、移動機構6は、被検者の体軸方向に直交する方向(X方向)に照明系2及び撮影系3を移動可能に構成されていてよい。なお、スリット光の向きや移動方向はこれらに限定されず、任意に設定可能であるが、典型的には移動方向はスリット光の幅方向に設定される。
Further, the
体軸方向を長手方向とするスリット光が照射され、且つ、体軸方向に直交する方向に照明系2及び撮影系3が移動される場合において、スリット光の長さ(体軸方向におけるスリット光の寸法)が体軸方向における角膜径以上になるように、照明系2を構成することができる。加えて、移動機構6による照明系2及び撮影系3の移動距離が、体軸方向に直交する方向(X方向)における角膜径以上であるように、移動機構6を構成することができる。この角膜径は、被検眼Eの角膜径でもよいし、標準的な角膜径でもよい。なお、スリット光の長さや移動距離はこれらに限定されず、任意に設定可能である。
When a slit light whose longitudinal direction is in the body axis direction is irradiated and the
このような構成によれば、角膜全体について画像を取得することができる。更に、シャインプルーフの条件を満足する構成と組み合わせることで、角膜全体を表すとともに十分な深さ範囲を表す画像を取得することが可能になる。 According to such a configuration, an image of the entire cornea can be acquired. Furthermore, by combining it with a configuration that satisfies the Scheimpflug condition, it becomes possible to obtain an image that represents the entire cornea and a sufficient depth range.
以上のように、スリットランプ顕微鏡1によれば、専門技術の保持者が微細で煩雑な操作を行わなくとも、前眼部の広い範囲(3次元領域)を表す高品質の画像を自動で取得することができる。読影者は、スリットランプ顕微鏡1により取得された画像の提供を受けて観察や診断を行うことが可能である。
As described above, according to the
したがって、専門技術保持者が不足しているという問題の解消を図ることができ、高品質なスリットランプ顕微鏡検査を広く提供することが可能となる。例えば、このようなスリットランプ顕微鏡1は、前眼部疾患などのスクリーニングにおいて有効と言える。
Therefore, it is possible to solve the problem of a shortage of specialized technicians, and it is possible to widely provide high-quality slit lamp microscopy. For example, such a
以下、スリットランプ顕微鏡1に組み合わせることが可能な例示的機能及び例示的構成について説明する。以下の実施形態において、第1実施形態と同様の要素を同じ符号で示すことがある。また、以下の実施形態において示す図において、第1実施形態と同様の要素を省略することがある。
Exemplary functions and configurations that can be combined with the
〈第2実施形態〉
本実施形態では、第1実施形態のスリットランプ顕微鏡1に適用可能な光学系の構成について説明する。その一例を図5に示す。なお、図5に示す要素群に加えて、他の実施形態に示す要素が設けられていてよい。例えば、第1の実施形態の制御部7、データ処理部8、通信部9などが設けられていてよい。
<Second embodiment>
In this embodiment, a configuration of an optical system applicable to the
図5に示す照明系20は第1実施形態の照明系2の例であり、左撮影系30L及び右撮影系30Rは撮影系3の例である。符号20aは照明系20の光軸(照明光軸)を示し、符号30Laは左撮影系30Lの光軸(左撮影光軸)を示し、符号30Raは右撮影系30Rの光軸(右撮影光軸)を示す。左撮影光軸30Laと右撮影光軸30Raとは、互いに異なる向きに配置されている。照明光軸20aと左撮影光軸30Laとがなす角度をθLで示し、照明光軸20aと右撮影光軸30Raとがなす角度をθRで示す。角度θLと角度θRとは、互いに等しくてもよいし異なってもよい。照明光軸20aと左撮影光軸30Laと右撮影光軸30Raとは、一点で交差する。図1と同様に、この交点のZ座標をZ0で示す。
The
移動機構6は、照明系20、左撮影系30L及び右撮影系30Rを、矢印49で示す方向(X方向)に移動可能である。典型的には、照明系20、左撮影系30L及び右撮影系30Rは、少なくともX方向に移動可能なステージ上に載置されており、且つ、移動機構6は、制御部7からの制御信号にしたがって、この可動ステージを移動させる。
The moving
照明系20は、被検眼Eの前眼部にスリット光を照射する。照明系20は、従来のスリットランプ顕微鏡の照明系と同様に、被検眼Eから遠い側から順に、照明光源21と、正レンズ22と、スリット形成部23と、対物レンズ群24及び25とを含む。
The
照明光源21から出力された照明光(典型的には可視光)は、正レンズ22により屈折されてスリット形成部23に投射される。投射された照明光の一部は、スリット形成部23が形成するスリットを通過してスリット光となる。生成されたスリット光は、対物レンズ群24及び25により屈折された後、ビームスプリッタ47により反射され、被検眼Eの前眼部に照射される。
Illumination light (typically visible light) output from the
左撮影系30Lは、反射器31Lと、結像レンズ32Lと、撮像素子33Lとを含む。反射器31L及び結像レンズ32Lは、照明系20によりスリット光が照射されている前眼部からの光(左撮影系30Lの方向に進行する光)を撮像素子33Lに導く。
The left photographing
前眼部から左撮影系30Lの方向に進行する光は、スリット光が照射されている前眼部からの光であって、照明光軸20aから離れる方向に進行する光である。反射器31Lは、当該光を照明光軸20aに近づく方向に反射する。結像レンズ32Lは、反射器31Lにより反射された光を屈折して撮像素子33Lの撮像面34Lに結像する。撮像素子33Lは、当該光を撮像面34Lにて受光する。
The light that travels from the anterior eye toward the
第1実施形態と同様に、左撮影系30Lは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行う。これにより複数の前眼部画像が得られる。
Similarly to the first embodiment, the
第1実施形態と同様に、照明光軸20aに沿う物面と、反射器31L及び結像レンズ32Lを含む光学系と、撮像面34Lとは、シャインプルーフの条件を満足する。より具体的には、反射器31Lによる撮影系30Lの光路の偏向を考慮すると、照明光軸20aを通るYZ面(物面を含む)と、結像レンズ32Lの主面と、撮像面34Lとが、同一の直線上にて交差する。これにより、左撮影系30Lは、物面内の全ての位置(例えば、角膜前面から水晶体後面までの範囲)にピントを合わせて撮影を行うことができる。
Similar to the first embodiment, the object surface along the illumination
右撮影系30Rは、反射器31Rと、結像レンズ32Rと、撮像素子33Rとを含む。左撮影系30Lと同様に、右撮影系30Rは、照明系20によりスリット光が照射されている前眼部からの光を、反射器31R及び結像レンズ32Rによって、撮像素子33Rの撮像面34Rに導く。更に、左撮影系30Lと同様に、右撮影系30Rは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことで、複数の前眼部画像を取得する。左撮影系30Lと同様に、照明光軸20aに沿う物面と、反射器31R及び結像レンズ32Rを含む光学系と、撮像面34Rとは、シャインプルーフの条件を満足する。
The right photographing
制御部7は、左撮影系30Lによる繰り返し撮影と、右撮影系30Rによる繰り返し撮影とを同期させることができる。これにより、左撮影系30Lにより得られた複数の前眼部画像と、右撮影系30Rにより得られた複数の前眼部画像との間の対応関係が得られる。この対応関係は、時間的な対応関係であり、より具体的には、実質的に同時に取得された画像同士をペアリングするものである。
The
或いは、制御部7又はデータ処理部8は、左撮影系30Lにより得られた複数の前眼部画像と、右撮影系30Rにより得られた複数の前眼部画像との間の対応関係を求める処理を実行することができる。例えば、制御部7又はデータ処理部8は、左撮影系30Lから逐次に入力される前眼部画像と、右撮影系30Rから逐次に入力される前眼部画像とを、それらの入力タイミングによってペアリングすることができる。
Alternatively, the
本実施形態は、動画撮影系40を更に含む。動画撮影系40は、左撮影系30L及び右撮影系30Rによる撮影と並行して、被検眼Eの前眼部を固定位置から動画撮影する。「固定位置から動画撮影」とは、照明系20、左撮影系30L及び右撮影系30Rと異なり、動画撮影系40が移動機構6により移動されないことを表す。
This embodiment further includes a
本実施形態の動画撮影系40は、照明系20と同軸に配置されているが、その配置はこれに限定されない。例えば、照明系20と非同軸に動画撮影系を配置することができる。また、動画撮影系40が感度を有する帯域の照明光で前眼部を照明する光学系が設けられていてもよい。
Although the
ビームスプリッタ47を透過した光は、反射器48により反射されて動画撮影系40に入射する。動画撮影系40に入射した光は、対物レンズ41により屈折された後、結像レンズ42によって撮像素子43の撮像面に結像される。撮像素子43はエリアセンサである。
The light transmitted through the
動画撮影系40が設けられている場合、被検眼Eの動きをモニタすることや、トラッキングを行うことができる。トラッキングは、被検眼Eの動きに光学系を追従させるための処理である。このような処理については他の実施形態で説明する。
When the
照明系20の出力波長及び動画撮影系40の検出波長に応じ、ビームスプリッタ47は、例えばダイクロイックミラー又はハーフミラーである。
Depending on the output wavelength of the
本実施形態により奏される効果を説明する。 The effects achieved by this embodiment will be explained.
本実施形態は、第1実施形態の撮影系3の例であり、左撮影系30Lと右撮影系30Rとを含む。左撮影系30Lと右撮影系30Rとの組み合わせは、第1撮影系と第2撮影系との組み合わせの例である。
This embodiment is an example of the
左撮影系30Lは、スリット光が照射されている前眼部からの光を導く反射器31L及び結像レンズ32L(第1光学系)と、導かれた光を撮像面34L(第1撮像面)で受光する撮像素子33L(第1撮像素子)とを含む。同様に、右撮影系30Rは、スリット光が照射されている前眼部からの光を導く反射器31R及び結像レンズ32R(第2光学系)と、導かれた光を撮像面34R(第2撮像面)で受光する撮像素子33R(第2撮像素子)とを含む。
The
左撮影系30Lの光軸(左撮影光軸30La)と右撮影系30Rの光軸(右撮影光軸30Ra)とは、互いに異なる向きに配置されている。更に、照明系20の光軸(照明光軸20a)に沿う物面と、反射器31L及び結像レンズ32Lと、撮像面34Lとは、シャインプルーフの条件を満足する。同様に、当該物面と、反射器31L及び結像レンズ32Lと、撮像面34Lとは、シャインプルーフの条件を満足する。
The optical axis of the
左撮影系30Lは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第1画像群を取得する。同様に、右撮影系30Rは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第2画像群を取得する。
The
このような構成によれば、スリット光が照射されている前眼部を、互いに異なる方向からそれぞれ動画撮影することができる。一方の撮影系により取得された画像にアーティファクトが含まれる場合であっても、他方の撮影系により当該画像と実質的に同時に取得された画像にはアーティファクトが含まれない場合がある。また、双方の撮影系により実質的に同時に取得された一対の画像の双方にアーティファクトが含まれる場合であって、一方の画像中のアーティファクトが注目領域(例えばスリット光照射領域)に重なっている場合でも、他方の画像中のアーティファクトが注目領域に重なっていない場合がある。したがって、好適な画像を取得できる可能性が高まる。実質的に同時に取得された一対の画像から好適な画像を取得する処理については後述する。 According to such a configuration, it is possible to take moving pictures of the anterior ocular segment irradiated with the slit light from different directions. Even if an image acquired by one imaging system includes an artifact, an image acquired by the other imaging system at substantially the same time as the image may not include the artifact. Also, when artifacts are included in both of a pair of images acquired substantially simultaneously by both imaging systems, and the artifact in one image overlaps the region of interest (for example, the slit light irradiation region). However, artifacts in the other image may not overlap the region of interest. Therefore, the possibility of obtaining a suitable image increases. The process of acquiring a suitable image from a pair of images acquired substantially simultaneously will be described later.
なお、撮影系3は、第1撮影系及び第2撮影系に加え、同様の構成の第3撮影系、・・・、第K撮影系(Kは3以上の整数)を含んでいてもよい。
In addition, the
本実施形態の左撮影系30Lは、反射器31Lと結像レンズ32Lとを含む。反射器31Lは、スリット光が照射されている前眼部からの光であって、照明光軸20aから離れる方向に進行する光を、照明光軸20aに近づく方向に反射する。更に、結像レンズ32Lは、反射器31Lにより反射された光を撮像面34Lに結像させる。ここで、結像レンズ32Lは、1以上のレンズを含む。
The
同様に、右撮影系30Rは、反射器31Rと結像レンズ32Rとを含む。反射器31Rは、スリット光が照射されている前眼部からの光であって、照明光軸20aから離れる方向に進行する光を、照明光軸20aに近づく方向に反射する。更に、結像レンズ32Rは、反射器31Rにより反射された光を撮像面34Rに結像させる。ここで、結像レンズ32Rは、1以上のレンズを含む。
Similarly, the
このような構成によれば、装置の小型化を図ることが可能である。すなわち、撮像素子33L(33R)により取得された画像は、撮像面34L(34R)の反対側の面から延びるケーブルを通じて出力されるが、本構成によれば、照明光軸20aに比較的近接して位置する撮像素子33L(33R)の背面から被検眼Eとは反対方向に向かって、ケーブルを配置することができる。したがって、ケーブルの引き回しを好適に行うことができ、装置の小型化を図ることが可能になる。
According to such a configuration, it is possible to downsize the device. That is, the image acquired by the
また、本構成によれば、角度θL及び角度θRを大きく設定することが可能となるため、一方の撮影系により取得された画像にアーティファクトが含まれる場合において、他方の撮影系により当該画像と実質的に同時に取得された画像にアーティファクトが含まれない可能性を高めることができる。また、双方の撮影系により実質的に同時に取得された一対の画像の双方にアーティファクトが含まれる場合であって、一方の画像中のアーティファクトが注目領域(例えばスリット光照射領域)に重なっている場合において、他方の画像中のアーティファクトが注目領域に重なっている可能性を低減することができる。 Furthermore, according to this configuration, it is possible to set the angle θL and the angle θR to a large value, so that when an image acquired by one imaging system contains an artifact, the image is substantially different from that obtained by the other imaging system. It is possible to increase the possibility that images acquired at the same time do not contain artifacts. Also, when artifacts are included in both of a pair of images acquired substantially simultaneously by both imaging systems, and the artifact in one image overlaps the region of interest (for example, the slit light irradiation region). In this case, it is possible to reduce the possibility that an artifact in the other image overlaps the region of interest.
本実施形態は、動画撮影系40を含む。左撮影系30L及び右撮影系30Rは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して、前眼部を繰り返し撮影する。この繰り返し撮影と並行して、動画撮影系40は、前眼部を固定位置から動画撮影する。
This embodiment includes a
このような構成によれば、スリット光による前眼部のスキャンと並行して固定位置(例えば正面)から動画撮影を行うことで、スキャン中における被検眼Eの状態を把握することや、被検眼Eの状態に応じた制御を行うことが可能である。その例については他の実施形態にて説明する。 According to such a configuration, by capturing a video from a fixed position (for example, from the front) in parallel with scanning the anterior segment of the eye using slit light, it is possible to grasp the condition of the eye E during the scan, and to It is possible to perform control according to the state of E. Examples thereof will be explained in other embodiments.
図5に示す構成の代わりに適用可能な光学系の例を図6に示す。なお、要素毎の符号は省略する。本例に係る光学系の左撮影系30L’において、反射器は、スリット光が照射されている前眼部からの光であって、照明光軸20a’から離れる方向に進行する光を、照明光軸20aから更に離れる方向に反射する。更に、結像レンズは、反射器により反射された光を撮像素子の撮像面に結像させる。
FIG. 6 shows an example of an optical system that can be applied instead of the configuration shown in FIG. 5. Note that the symbols for each element are omitted. In the left photographing
このような構成を採用することも可能であるが、照明光軸20a’から比較的遠くに位置する撮像素子の背面から側方(又は被検眼Eに向かう方向)にケーブルが配置されるため、ケーブルの引き回しを好適に行えないという問題が伴う。
Although it is possible to adopt such a configuration, since the cable is arranged laterally (or in the direction toward the eye E to be examined) from the back of the image sensor located relatively far from the illumination
〈第3実施形態〉
本実施形態では、第1実施形態のスリットランプ顕微鏡1に適用可能な処理系の構成について説明する。なお、本実施形態の撮影系3においては、例えば第2実施形態で説明した図5のように、左撮影光軸30Laと右撮影光軸30Raとが照明光軸20aに対して互いに反対の方向に傾斜して配置されている。本実施形態の処理系は、次のようなアーティファクトに係る処理を実行する。
<Third embodiment>
In this embodiment, the configuration of a processing system applicable to the
図7に示すデータ処理部8Aは、第1実施形態のデータ処理部8の例である。データ処理部8Aは画像選択部81を含む。
The
画像選択部81は、左撮影系30L及び右撮影系30Rにより実質的に同時に取得された2つの画像のいずれかにアーティファクトが含まれるか判定する。アーティファクト判定は、所定の画像解析を含み、典型的には、画素に割り当てられた輝度情報に関する閾値処理を含む。
The
この閾値処理では、例えば、予め設定された閾値を超える輝度値が割り当てられた画素が特定される。典型的には、閾値は、画像中のスリット光照射領域の輝度値よりも高く設定される。この場合、画像選択部81は、スリット光の照射領域をアーティファクトとして判定せず、且つ、それよりも明るい像(例えば正反射像)をアーティファクトとして判定する。
In this threshold processing, for example, pixels to which a luminance value exceeding a preset threshold is assigned are identified. Typically, the threshold value is set higher than the brightness value of the slit light irradiation area in the image. In this case, the
画像選択部81は、アーティファクト判定のために、例えば、パターン認識、セグメンテーション、エッジ検出など、閾値処理以外の任意の画像解析を実行してもよい。一般に、画像解析、画像処理、人工知能、コグニティブ・コンピューティングなど、任意の情報処理技術を、アーティファクト判定に適用することが可能である。
The
アーティファクト判定の結果、左撮影系30L及び右撮影系30Rにより実質的に同時に取得された2つの画像の一方の画像にアーティファクトが含まれると判定されたとき、画像選択部81は、他方の画像を選択する。つまり、画像選択部81は、これら2つの画像のうち、アーティファクトが含まれると判定された画像ではない方の画像を選択する。
As a result of the artifact determination, when it is determined that one of the two images acquired substantially simultaneously by the
双方の画像にアーティファクトが含まれる場合、画像選択部81は、例えば、アーティファクトが観察や診断に与える悪影響を評価し、悪影響が小さい側の画像を選択することができる。この評価は、例えば、アーティファクトの大きさ及び/又は位置に基づき行われる。典型的には、含まれるアーティファクトが大きい画像は悪影響が大きいと評価され、スリット光照射領域などの注目領域やその近傍にアーティファクトが位置している画像は悪影響が大きいと評価される。
When artifacts are included in both images, the
なお、双方の画像にアーティファクトが含まれる場合、第4実施形態で説明するアーティファクト除去を適用してもよい。 Note that if both images include artifacts, artifact removal described in the fourth embodiment may be applied.
第2実施形態で説明したように、左撮影系30Lは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第1画像群を取得する。同様に、右撮影系30Rは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第2画像群を取得する。繰り返し撮影は典型的には動画撮影であり、第1画像群及び第2画像群のそれぞれは、動画像を構成するフレーム群である。また、前述したように、第1画像群及び第2画像群のうち実質的に同時に取得された画像同士がペアリングされている。
As described in the second embodiment, the
画像選択部81は、ペアリングされた2つの画像(第1画像群からの画像と第2画像群からの画像との組み合わせ)のうちの1つを選択する。これにより、例えば、複数の画像ペアのそれぞれから1つの画像が選択され、実質的にアーティファクトを含まない複数の画像が選択される。
The
データ処理部8Aは、3次元画像構築部82を更に含む。3次元画像構築部82は、画像選択部81により第1画像群及び第2画像群から選択された画像を含む画像群に基づいて3次元画像を構築する。この画像群は、画像選択部81により第1画像群及び第2画像群から選択された複数の画像のいずれかのみを含んでいてもよいし、これら以外の画像を更に含んでいてもよい。
The
なお、3次元画像は、3次元座標系によって画素の位置が定義された画像(画像データ)である。3次元画像の例として、スタックデータやボリュームデータがある。スタックデータは、複数の2次元画像をそれらの位置関係に応じて単一の3次元座標系に埋め込むことで構築される。ボリュームデータは、ボクセルデータとも呼ばれ、例えば、スタックデータにボクセル化を適用することで構築される。 Note that a three-dimensional image is an image (image data) in which pixel positions are defined by a three-dimensional coordinate system. Examples of three-dimensional images include stack data and volume data. Stack data is constructed by embedding multiple two-dimensional images into a single three-dimensional coordinate system according to their positional relationships. Volume data is also called voxel data, and is constructed by applying voxelization to stacked data, for example.
3次元画像を構築する処理の例を説明する。3次元画像構築が適用される画像群は、図3に示す複数の前眼部画像(フレーム群)F1、F2、F3、・・・、FNであるとする。前眼部画像Fnにはスリット光照射領域Anが含まれている(n=1、2、・・・、N)。 An example of processing for constructing a three-dimensional image will be explained. It is assumed that the image group to which three-dimensional image construction is applied is a plurality of anterior segment images (frame group) F1, F2, F3, . . . , FN shown in FIG. The anterior segment image Fn includes a slit light irradiation area An (n=1, 2, . . . , N).
3次元画像構築部82は、前眼部画像Fnを解析してスリット光照射領域Anを抽出する。スリット光照射領域Anの抽出は、画素に割り当てられた輝度情報を参照して行われ、典型的には閾値処理を含む。これにより、スリット光照射領域An(のみ)が描出されたスリット光照射領域画像Gnが得られる(n=1、2、・・・、N)。図8は、複数の前眼部画像F1~FNから構築された複数のスリット光照射領域画像G1~GNの例を示す。
The three-dimensional
スリット光照射領域画像Gnにアーティファクトが含まれている場合、例えば公知の画像処理又は他の実施形態に係る画像処理によって、スリット光照射領域画像Gnからアーティファクトを除去することができる。また、他の実施形態で説明する歪み補正を前眼部画像Fn又はスリット光照射領域画像Gnに適用することができる。 When an artifact is included in the slit light irradiation area image Gn, the artifact can be removed from the slit light irradiation area image Gn, for example, by known image processing or image processing according to another embodiment. Further, distortion correction described in other embodiments can be applied to the anterior segment image Fn or the slit light irradiation area image Gn.
3次元画像構築部82は、複数のスリット光照射領域画像G1~GNの少なくとも一部に基づいて3次元画像を構築する。3次元画像やその構築の詳細については、他の実施形態で説明する。 The three-dimensional image constructing unit constructs a three-dimensional image based on at least a portion of the plurality of slit light irradiation area images G1 to GN. Details of the three-dimensional image and its construction will be explained in other embodiments.
本実施形態により奏される効果を説明する。 The effects achieved by this embodiment will be explained.
本実施形態では、例えば図5に示すように、左撮影光軸30Laと右撮影光軸30Raとが、照明光軸20aに対して互いに反対の方向に傾斜して配置されている。本実施形態のデータ処理部8Aは画像選択部81を含む。画像選択部81は、左撮影系30L及び右撮影系30Rにより実質的に同時に取得された2つの画像のいずれかにアーティファクトが含まれるか判定する。2つの画像のうちの一方の画像にアーティファクトが含まれると判定された場合、画像選択部81は、2つの画像のうちの他方の画像、つまりアーティファクトが含まれていない画像、を選択する。
In this embodiment, for example, as shown in FIG. 5, the left photographing optical axis 30La and the right photographing optical axis 30Ra are arranged to be inclined in opposite directions with respect to the illumination
このような構成によれば、観察や診断の妨げになるアーティファクト(正反射像など)を含まない画像を選択することが可能である。 According to such a configuration, it is possible to select an image that does not include artifacts (such as specular reflection images) that interfere with observation and diagnosis.
更に、本実施形態のデータ処理部8Aは3次元画像構築部82を含む。3次元画像構築部82は、左撮影系30Lにより取得された複数の画像及び右撮影系30Rにより取得された複数の画像のうちから画像選択部81によって選択された画像を含む画像群に基づいて、被検眼Eの前眼部を表す3次元画像を構築する。
Furthermore, the
このような構成によれば、観察や診断の妨げになるアーティファクトを含まない画像群に基づいて、前眼部の3次元画像を構築することが可能である。 According to such a configuration, it is possible to construct a three-dimensional image of the anterior segment of the eye based on a group of images that do not include artifacts that interfere with observation or diagnosis.
〈第4実施形態〉
本実施形態では、第1実施形態のスリットランプ顕微鏡1に適用可能な処理系の構成について説明する。
<Fourth embodiment>
In this embodiment, the configuration of a processing system applicable to the
本実施形態の撮影系3においては、第2実施形態で説明した図5のように、左撮影光軸30Laと右撮影光軸30Raとが照明光軸20aに対して互いに反対の方向に傾斜して配置されていてもよいし、或いは、2つの撮影光軸が照明光軸に対して同じ方向に配置されていてもよい。後者の場合、2つの撮影光軸のうちの一方の撮影光軸と照明光軸とがなす角度と、他方の撮影光軸と照明光軸とがなす角度とは、互いに異なる。また、いずれの場合においても、照明光軸に対する一方の撮影光軸の位置と、照明光軸に対する他方の撮影光軸の位置とは、互いに異なる。本実施形態の処理系は、次のようなアーティファクトに係る処理を実行する。
In the
図9に示すデータ処理部8Bは、第1実施形態のデータ処理部8の例である。データ処理部8Bはアーティファクト除去部83を含む。
The
アーティファクト除去部83は、左撮影系30L及び右撮影系30Rにより実質的に同時に取得された2つの画像を比較することにより、これら2つの画像のいずれかにアーティファクトが含まれるか判定する。ここで、左撮影系30L及び右撮影系30Rにより実質的に同時に取得された2つの画像は、例えば、前述した画像のペアリングによって互いに対応付けられたものである。
The
前述したように、本実施形態では、照明光軸に対する一方の撮影光軸の位置と、照明光軸に対する他方の撮影光軸の位置とが、互いに異なっている。したがって、一方の撮影系(例えば左撮影系30L)により取得された画像におけるアーティファクトの位置と、他方の撮影系(例えば右撮影系30R)により取得された画像におけるアーティファクトの位置とが、互いに異なる。或いは、比較される2つの画像のうち一方の画像にのみアーティファクトが含まれる。
As described above, in this embodiment, the position of one photographing optical axis with respect to the illumination optical axis and the position of the other photographing optical axis with respect to the illumination optical axis are different from each other. Therefore, the position of the artifact in the image acquired by one imaging system (for example, the
アーティファクト除去部83は、これら2つの画像のそれぞれを解析してアーティファクトを含むか判定する。アーティファクト判定は、例えば第3実施形態の画像選択部81と同じ要領で実行される。
The
2つの画像の一方にのみアーティファクトが含まれている場合、アーティファクト除去部83がこのアーティファクトを除去するか、或いは第3実施形態のようにアーティファクトが含まれない画像を選択することができる。なお、2つの画像の一方にアーティファクトが含まれ、且つ、他方にアーティファクトが含まれないと判定することは、2つの画像の比較に相当する。
If only one of the two images contains an artifact, the
2つの画像の双方にアーティファクトが含まれている場合、アーティファクト除去部83は、2つの画像の一方又は双方を処理してアーティファクトを除去する。
If an artifact is included in both of the two images, the
アーティファクト除去部83は、アーティファクトが除去された画像領域に、他の画像の部分領域を貼り付けることができる。前述したように、比較される2つの画像におけるアーティファクトの位置が異なるか、或いは、これら2つの画像の一方にしかアーティファクトは含まれないので、一方の画像からアーティファクトが除去された場合、他方の画像における対応領域はアーティファクトではない。アーティファクト除去部83は、この対応領域を他方の画像から抽出し、これをアーティファクトが除去された箇所に貼り付ける。
The
或いは、第2実施形態の動画撮影系40のように他の撮影系が設けられている場合、それにより取得された前眼部の画像における対応領域を抽出し、これをアーティファクトが除去された箇所に貼り付けることが可能である。
Alternatively, if another imaging system is provided, such as the
第2実施形態で説明したように、左撮影系30Lは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第1画像群を取得する。同様に、右撮影系30Rは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第2画像群を取得する。繰り返し撮影は典型的には動画撮影であり、第1画像群及び第2画像群のそれぞれは、動画像を構成するフレーム群である。また、前述したように、第1画像群及び第2画像群のうち実質的に同時に取得された画像同士がペアリングされている。アーティファクト除去部83は、複数の画像ペアのそれぞれについて、上記のようなアライメント除去を適用する。
As described in the second embodiment, the
データ処理部8Bは、3次元画像構築部84を更に含む。3次元画像構築部84は、アーティファクト除去部83によりアーティファクトが除去された画像を含む画像群に基づいて3次元画像を構築する。この画像群は、アーティファクト除去部83により処理された複数の画像のいずれかのみを含んでいてもよいし、これら以外の画像を更に含んでいてもよい。3次元画像やその構築の詳細については、他の実施形態で説明する。
The
本実施形態により奏される効果を説明する。 The effects achieved by this embodiment will be explained.
本実施形態のデータ処理部8Bはアーティファクト除去部83を含む。アーティファクト除去部83は、左撮影系30L及び右撮影系30Rにより実質的に同時に取得された2つの画像を比較することにより、これら2つの画像のいずれかにアーティファクトが含まれるか判定する。いずれかの画像にアーティファクトが含まれると判定された場合、アーティファクト除去部83は、このアーティファクトの除去を実行する。
The
このような構成によれば、観察や診断の妨げになるアーティファクト(正反射像など)を含まない画像を構築することが可能である。 According to such a configuration, it is possible to construct an image that does not include artifacts (such as specular reflection images) that interfere with observation and diagnosis.
更に、本実施形態のデータ処理部8Bは3次元画像構築部84を含む。3次元画像構築部84は、アーティファクト除去部83によりアーティファクトが除去された画像を含む画像群に基づいて、被検眼Eの前眼部を表す3次元画像を構築する。
Furthermore, the
このような構成によれば、観察や診断の妨げになるアーティファクトを含まない画像群に基づいて、前眼部の3次元画像を構築することが可能である。 According to such a configuration, it is possible to construct a three-dimensional image of the anterior segment of the eye based on a group of images that do not include artifacts that interfere with observation or diagnosis.
〈第5実施形態〉
本実施形態では、第1実施形態のスリットランプ顕微鏡1に適用可能な処理系の構成について説明する。第3実施形態及び第4実施形態では、典型的には、第1撮影系及び第2撮影系により実質的に同時に取得された2つの画像に対してアーティファクトに関する処理を適用し、アーティファクトを含まない画像群に基づいて3次元画像を構築している。一方、アーティファクトに関する処理を経ることなく3次元画像を構築することも可能である。本実施形態は、このような場合に適用可能である。
<Fifth embodiment>
In this embodiment, the configuration of a processing system applicable to the
図10に示すデータ処理部8Cは、第1実施形態のデータ処理部8の例である。データ処理部8Cは3次元画像構築部85を含む。
The
本実施形態の第1の例では、第1実施形態で説明したように、撮影系3が、移動機構6による照明系2及び撮影系3の移動と並行して繰り返し撮影を行うことにより、被検眼Eの前眼部の複数の画像を取得する。
In the first example of the present embodiment, as described in the first embodiment, the
3次元画像構築部85は、撮影系3により取得された複数の画像に基づいて3次元画像を構築することができる。3次元画像構築に用いられる画像群は、撮影系3により取得された複数の画像のいずれかのみを含んでいてもよいし、これら以外の画像を更に含んでいてもよい。3次元画像やその構築の詳細については、他の実施形態で説明する。
The three-dimensional
本実施形態の第2の例では、第2実施形態で説明したように、左撮影系30Lが、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第1画像群を取得する。同様に、右撮影系30Rが、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第2画像群を取得する。第1画像群及び第2画像群のうち実質的に同時に取得された画像同士はペアリングされている。
In the second example of the present embodiment, as described in the second embodiment, the left photographing
3次元画像構築部85は、左撮影系30Lにより取得された第1画像群に基づいて3次元画像を構築することができる。この3次元画像の構築に用いられる画像群は、第1画像群のいずれかのみを含んでいてもよいし、これら以外の画像を更に含んでいてもよい。同様に、3次元画像構築部85は、右撮影系30Rにより取得された第2画像群に基づいて3次元画像を構築することができる。この3次元画像の構築に用いられる画像群は、第2画像群のいずれかのみを含んでいてもよいし、これら以外の画像を更に含んでいてもよい。3次元画像やその構築の詳細については、他の実施形態で説明する。
The three-dimensional
本実施形態により奏される効果を説明する。 The effects achieved by this embodiment will be explained.
本実施形態のデータ処理部8Cは3次元画像構築部85を含む。3次元画像構築部85は、撮影系3により取得された複数の画像に基づいて3次元画像を構築する。撮影系3は、左撮影系30L及び右撮影系30Rの双方を含んでいてもよいし、これらの一方に対応する単一の撮影系のみを含んでいてもよい。
The
このような構成によれば、被検眼Eの前眼部における3次元領域を表す3次元画像を構築することが可能である。3次元画像は観察や診断に有用である。 According to such a configuration, it is possible to construct a three-dimensional image representing a three-dimensional region in the anterior segment of the eye E to be examined. Three-dimensional images are useful for observation and diagnosis.
〈第6実施形態〉
本実施形態は、第3~第5実施形態のように前眼部の3次元画像を構築可能である場合に適用可能である。
<Sixth embodiment>
This embodiment is applicable to cases where it is possible to construct a three-dimensional image of the anterior segment, as in the third to fifth embodiments.
前述したように、3次元画像は、スリット光のスキャンによって逐次に得られた複数の画像から構築される。複数の画像から3次元画像を構築するには複数の画像を配列する必要があるが、複数の画像は異なるタイミングで得られたものであるため、高い確度、高い精度で複数の画像を配列することは困難である。本実施形態は、このような問題を解決すべく考案されたものである。 As described above, a three-dimensional image is constructed from a plurality of images sequentially obtained by scanning with slit light. To construct a 3D image from multiple images, it is necessary to arrange the multiple images, but since the multiple images were obtained at different times, the multiple images can be arranged with high accuracy and precision. That is difficult. This embodiment was devised to solve such a problem.
図11に示す制御部7は第1実施形態のそれと同様である。移動機構6Aは、第1実施形態の移動機構6の例であり、平行移動機構61と回転機構62とを含む。データ処理部8Dは3次元画像構築部86を含む。3次元画像構築部86は、第3実施形態の3次元画像構築部82の例であり、第4実施形態の3次元画像構築部84の例であり、且つ、第5実施形態の3次元画像構築部85の例である。3次元画像構築部86は画像位置決定部87を含む。
The
第1実施形態の図1に示す構成が適用される場合、平行移動機構61は、スリット光で前眼部をスキャンするために、照明系2及び撮影系3を一体的にX方向に移動する。
When the configuration shown in FIG. 1 of the first embodiment is applied, the
第2実施形態の図5に示す構成が適用される場合、平行移動機構61は、スリット光で前眼部をスキャンするために、照明系20、左撮影系30L及び右撮影系30Rを一体的にX方向に移動する。
When the configuration shown in FIG. 5 of the second embodiment is applied, the
第1実施形態の図1に示す構成が適用される場合、回転機構62は、照明光軸2aを回転軸として照明系2及び撮影系3を一体的に回転する。
When the configuration shown in FIG. 1 of the first embodiment is applied, the
第2実施形態の図5に示す構成が適用される場合、回転機構62は、照明光軸20aを回転軸として照明系20、左撮影系30L及び右撮影系30Rを一体的に回転する。
When the configuration shown in FIG. 5 of the second embodiment is applied, the
これにより、被検眼Eの前眼部に照射されるスリット光の向きを回転することができ、且つ、スリット光の向きの回転と同じ角度だけ撮影方向も回転する。 Thereby, the direction of the slit light irradiated onto the anterior segment of the eye E to be examined can be rotated, and the imaging direction is also rotated by the same angle as the rotation of the direction of the slit light.
第1実施形態の図1に示す構成が適用される場合、照明系2及び撮影系3が第1回転位置に配置されているときにスリット光による前眼部スキャンが実行されて撮影系3により複数の画像が取得される。
When the configuration shown in FIG. 1 of the first embodiment is applied, when the
第2実施形態の図5に示す構成が適用される場合、照明系20、左撮影系30L及び右撮影系30Rが第1回転位置に配置されているときにスリット光による前眼部スキャンが実行され、左撮影系30Lにより第1画像群が取得され、且つ、右撮影系30Rにより第2画像群が取得される。
When the configuration shown in FIG. 5 of the second embodiment is applied, an anterior segment scan using slit light is performed when the
第1回転位置は、例えば、前眼部に投射されるスリット光の長手方向が被検者の体軸方向(Y方向)に一致するような回転位置である。 The first rotational position is, for example, a rotational position where the longitudinal direction of the slit light projected onto the anterior segment of the eye coincides with the body axis direction (Y direction) of the subject.
第1実施形態の図1に示す構成が適用される場合、第1回転位置と異なる第2回転位置に照明系2及び撮影系3が配置されているときに、撮影系3は、照明系20によりスリット光が照射されている前眼部の画像を取得する。
When the configuration shown in FIG. 1 of the first embodiment is applied, when the
第2実施形態の図5に示す構成が適用される場合、第1回転位置と異なる第2回転位置に照明系20、左撮影系30L及び右撮影系30Rが配置されているときに、左撮影系30L及び右撮影系30Rのそれぞれは、照明系20によりスリット光が照射されている前眼部の画像を取得する。
When the configuration shown in FIG. 5 of the second embodiment is applied, when the
第2回転位置は、例えば、前眼部に投射されるスリット光の長手方向が左右方向(X方向)に一致するような回転位置である。これにより、第1回転位置にて行われる前眼部スキャンとは別に、1回以上の撮影が行われる。この付加的な撮影において、スリット光の向きは、前眼部スキャン時のそれと異なる。典型的には、前眼部スキャンにおける全てのスリット光照射領域を通過するように、スリット光の向きを設定することができる。 The second rotational position is, for example, a rotational position where the longitudinal direction of the slit light projected onto the anterior segment of the eye coincides with the left-right direction (X direction). As a result, one or more imaging operations are performed in addition to the anterior segment scan performed at the first rotational position. In this additional imaging, the direction of the slit light is different from that during anterior segment scanning. Typically, the direction of the slit light can be set so that it passes through all the slit light irradiation areas in the anterior segment scan.
画像位置決定部87は、第2回転位置において取得された前眼部の画像に基づいて、第1回転位置において取得された前眼部の複数の画像の相対位置を決定する。この画像位置決定は、第2回転位置にて得られた画像を参照して、第1回転位置にて得られた複数の画像の配列を調整するものである。
The image
画像位置決定部87は、例えば、第1回転位置にて得られた各画像と、第2回転位置にて得られた画像とを解析して両者の共通領域を特定する。更に、画像位置決定部87は、特定された共通領域を基準として、第1回転位置にて得られた各画像と、第2回転位置にて得られた画像との相対位置を決定する。
For example, the image
第1回転位置にて得られた全ての画像に対してこのような処理を適用することにより、第2回転位置にて得られた画像を基準として、第1回転位置にて得られた全ての画像が配列される。すなわち、第2回転位置にて得られた画像を媒介して、第1回転位置にて得られた全ての画像の相対位置が決定される。 By applying such processing to all images obtained at the first rotation position, all images obtained at the first rotation position are Images are arranged. That is, the relative positions of all images obtained at the first rotation position are determined using the images obtained at the second rotation position.
画像位置決定部87が実行する処理は、例えば、画像相関処理、セグメンテーション、パターンマッチング、人工知能を利用した処理、コグニティブ・コンピューティングを利用した処理など、任意の情報処理を含んでいてよい。
The processing executed by the image
3次元画像構築部86は、画像位置決定部87により決定された相対位置に基づいて、第1回転位置にて得られた複数の画像を単一の3次元座標系に配列し、3次元画像を形成する。
The three-dimensional
図12は、本実施形態におけるスリット光の照射位置の例を示す。図12は、前眼部を正面から見た状態を表している。照明系2及び撮影系3が第1回転位置に配置されているとき、前眼部スキャンにおける複数のスリット光照射領域は、Y方向を長手方向とし且つX方向に配列された複数のストリップ状領域に相当する。本例の前眼部スキャンでは、これらストリップ状領域に対し、矢印11により示された順序で、順次にスリット光が照射される。各ストリップ状領域にスリット光が照射されているときに、少なくとも1回の撮影が行われる。
FIG. 12 shows an example of the irradiation position of the slit light in this embodiment. FIG. 12 shows the anterior segment of the eye viewed from the front. When the
一方、符号12は、照明系2及び撮影系3が第2回転位置に配置されているときに前眼部に照射されるスリット光の位置を示す。第2回転位置に対応するスリット光照射領域12は、X方向を長手方向とするストリップ状領域である。つまり、本例では、第1回転位置にて前眼部に照射されるスリット光の向きと、第2回転位置にて前眼部に照射されるスリット光の向きとが互いに直交している。なお、第1回転位置にて前眼部に照射されるスリット光の向きと、第2回転位置にて前眼部に照射されるスリット光の向きとの関係は、これに限定されず、双方の向きが異なっていれば十分である。
On the other hand,
ここでは、照明系2及び撮影系3が適用される場合について説明したが、照明系20、左撮影系30L及び右撮影系30Rが適用される場合などにおいても同様である。
Although the case where the
本例では、第1回転位置での前眼部スキャンと、第2回転位置での撮影との双方が実行されるが、これらを実施するタイミングは任意であってよい。例えば、第2回転位置での撮影を行った後に第1回転位置での前眼部スキャンを行うことや、第1回転位置での前眼部スキャンの後に第2回転位置での撮影を行うことや、第1回転位置での前眼部スキャンの途中段階で第2回転位置での撮影を行うことが可能である。 In this example, both the anterior segment scan at the first rotational position and the imaging at the second rotational position are performed, but the timing for performing these may be arbitrary. For example, performing an anterior segment scan at the first rotational position after imaging at the second rotational position, or performing imaging at the second rotational position after performing an anterior segment scan at the first rotational position. Or, it is possible to perform imaging at the second rotational position during the anterior segment scan at the first rotational position.
本実施形態により奏される効果を説明する。 The effects achieved by this embodiment will be explained.
本実施形態の移動機構6Aは、照明光軸2a(20a)を回転軸として照明系2(20)及び撮影系3(30L、30R)を一体的に回転する回転機構62を含む。照明系2(20)及び撮影系3(30L、30R)が第1回転位置に配置されているときに、撮影系3(30L、30R)は、スリット光が照射されている前眼部の複数の画像を取得する。更に、第1回転位置と異なる第2回転位置に照明系2(20)及び撮影系3(30L、30R)が配置されているときに、撮影系3(30L、30R)は、照明系2(20)によりスリット光が照射されている前眼部の画像を取得する。画像位置決定部87は、第2回転位置において取得された画像に基づいて、第1回転位置において取得された複数の画像の相対位置を決定する。3次元画像構築部86は、決定された相対位置に基づき複数の画像の間の位置合わせを行って3次元画像を構築する。
The moving
このような構成によれば、第1回転位置において取得された複数の画像の間の位置合わせを、第2回転位置において取得された画像を参照して行うことができるので、3次元画像構築の確度や精度の向上を図ることが可能である。 According to such a configuration, alignment between a plurality of images acquired at the first rotational position can be performed with reference to the image acquired at the second rotational position, so that construction of a three-dimensional image is facilitated. It is possible to improve accuracy and precision.
なお、「第1回転位置において取得された複数の画像の相対位置を決定する」は、当該複数の画像自体の相対位置を決定することだけでなく、当該複数の画像からそれぞれ抽出された複数のスリット光照射領域の相対位置を決定することも含む。よって、本実施形態は、当該複数の画像の相対位置を決定した後にスリット光照射領域を抽出する場合と、当該複数の画像からスリット光照射領域を抽出した後にそれらの相対位置を決定する場合との双方を含む。 Note that "determining the relative positions of the plurality of images acquired at the first rotational position" does not only mean determining the relative positions of the plurality of images themselves, but also determining the relative positions of the plurality of images respectively extracted from the plurality of images. It also includes determining the relative position of the slit light irradiation area. Therefore, in this embodiment, the slit light irradiation area is extracted after determining the relative positions of the plurality of images, and the slit light irradiation area is extracted from the plurality of images and then their relative positions are determined. Including both.
また、本実施形態は、第3実施形態が適用される場合のように、第1回転位置において取得された複数の画像から選択された画像群の相対位置を決定することを含む。更に、本実施形態は、第4実施形態が適用される場合のように、第1回転位置において取得された複数の画像を加工して得られた画像群の相対位置を決定することを含む。よって、本実施形態は、当該複数の画像の相対位置を決定した後に画像の選択又は加工を行う場合と、画像の選択又は加工を行った後に選択画像又は加工画像の相対位置を決定する場合との双方を含む。 This embodiment also includes determining the relative position of a group of images selected from a plurality of images acquired at the first rotational position, as in the case where the third embodiment is applied. Furthermore, this embodiment includes determining the relative position of a group of images obtained by processing a plurality of images acquired at the first rotational position, as in the case where the fourth embodiment is applied. Therefore, in this embodiment, there are cases in which images are selected or processed after determining the relative positions of the plurality of images, and cases in which the relative positions of selected images or processed images are determined after images are selected or processed. Including both.
〈第7実施形態〉
本実施形態では、第3~第6実施形態などにおいて説明した3次元画像構築について説明する。
<Seventh embodiment>
In this embodiment, three-dimensional image construction explained in the third to sixth embodiments will be explained.
図13に示す3次元画像構築部88は、画像領域抽出部89と、画像合成部90とを含む。
The three-dimensional image construction section 88 shown in FIG. 13 includes an image
第1実施形態の図1に示す構成が適用される場合、画像領域抽出部89は、照明系2及び撮影系3の移動と並行して撮影系3により取得された複数の画像のそれぞれから、照明系2からのスリット光の照射領域に対応する画像領域を抽出する。抽出される画像領域は、2次元画像領域又は3次元画像領域である。
When the configuration shown in FIG. 1 of the first embodiment is applied, the image
第2実施形態の図5に示す構成が適用される場合、画像領域抽出部89は、照明系20、左撮影系30L及び右撮影系30Rの移動と並行して左撮影系30Lにより取得された複数の画像のそれぞれから、照明系20からのスリット光の照射領域に対応する画像領域を抽出することができる。また、画像領域抽出部89は、照明系20、左撮影系30L及び右撮影系30Rの移動と並行して右撮影系30Rにより取得された複数の画像のそれぞれから、照明系20からのスリット光の照射領域に対応する画像領域を抽出することができる。本例においても、抽出される画像領域は、2次元画像領域又は3次元画像領域である。
When the configuration shown in FIG. 5 of the second embodiment is applied, the image
画像領域抽出部89が実行する処理は、例えば、第3実施形態において図3及び図8を参照しつつ説明した、前眼部画像Fnからスリット光照射領域Anを抽出してスリット光照射領域画像Gnを構築する処理と同じ要領で実行される。
The process executed by the image
画像合成部90は、画像領域抽出部89により複数の画像からそれぞれ抽出された複数の画像領域(複数のスリット光照射領域)を合成して3次元画像を構築する。画像合成部90は、例えば、複数のスリット光照射領域を単一の3次元座標系に埋め込む処理を含み、埋め込まれた複数のスリット光照射領域を加工する処理を更に含んでもよい。複数のスリット光照射領域の加工としては、例えば、ノイズ除去、ノイズ低減、ボクセル化などを実行することが可能である。
The
複数のスリット光照射領域を合成する前に、第6実施形態に係る処理を適用して複数のスリット光照射領域の相対位置を決定してもよい。 Before combining the plurality of slit light irradiation regions, the relative positions of the plurality of slit light irradiation regions may be determined by applying the process according to the sixth embodiment.
画像領域抽出部89は、複数の画像のそれぞれから、スリット光照射領域及び前眼部の所定部位の双方に対応する画像領域を抽出するように構成されていてよい。前眼部の所定領域は、例えば、角膜前面及び水晶体後面により画成される部位であってよい。
The image
例えば、画像領域抽出部89は、まず、輝度情報の閾値処理によってスリット光照射領域を特定し、且つ、セグメンテーションによって角膜前面に相当する画像領域と水晶体後面に相当する画像領域とを特定する。
For example, the image
次に、画像領域抽出部89は、角膜前面に相当する画像領域と水晶体後面に相当する画像領域とに基づき、角膜前面及び水晶体後面により画成される部位に対応する画像領域(対象画像領域)を特定する。
Next, based on the image area corresponding to the anterior surface of the cornea and the image area corresponding to the posterior surface of the crystalline lens, the image
続いて、画像領域抽出部89は、スリット光照射領域と対象画像領域との間の共通領域、つまりスリット光照射領域及び対象画像領域の双方に含まれる画像領域、を特定する。これにより、例えば、角膜前面から水晶体後面までの範囲においてスリット光照射領域に相当する、対象画像中の2次元画像領域(断面)又は3次元画像領域(スライス)が特定される。
Subsequently, the image
本例では、スリット光照射領域の抽出の後に画像合成を行っているが、この逆に、画像合成の後にスリット光照射領域の抽出を行ってもよい。また、抽出される画像領域はスリット光照射領域に限定されず、所定領域は角膜前面から水晶体後面までの部位に限定されない。 In this example, image synthesis is performed after extraction of the slit light irradiation area, but conversely, extraction of the slit light irradiation area may be performed after image synthesis. Further, the image area to be extracted is not limited to the slit light irradiation area, and the predetermined area is not limited to the region from the anterior surface of the cornea to the posterior surface of the crystalline lens.
このような構成によれば、スリット光を用いた前眼部スキャンで得られた複数の画像から、前眼部の所望の部位の3次元画像を取得することができる。特に、スリットランプ顕微鏡検査での主要な観察対象であるスリット光照射領域を表す3次元画像を構築することができ、更に、前眼部の主要な観察対象である角膜前面から水晶体後面までの部位を表す3次元画像を構築することができる。 According to such a configuration, a three-dimensional image of a desired region of the anterior segment of the eye can be obtained from a plurality of images obtained by scanning the anterior segment of the eye using slit light. In particular, it is possible to construct a three-dimensional image that represents the slit light irradiation area, which is the main observation target in slit lamp microscopy, and also the area from the anterior surface of the cornea to the posterior surface of the crystalline lens, which is the main observation target in the anterior segment of the eye. It is possible to construct a three-dimensional image representing the .
〈第8実施形態〉
本実施形態では、第3~第7実施形態などにおいて構築された3次元画像のレンダリングについて説明する。
<Eighth embodiment>
In this embodiment, rendering of three-dimensional images constructed in the third to seventh embodiments will be described.
図14に示すデータ処理部8Eは、3次元画像構築部91と、レンダリング部92とを含む。3次元画像構築部91は、例えば、第3実施形態の3次元画像構築部82、第4実施形態の3次元画像構築部84、第5実施形態の3次元画像構築部85、第6実施形態の3次元画像構築部86、及び、第7実施形態の3次元画像構築部88のいずれかであってよい。
The
レンダリング部92は、3次元画像構築部91により構築された3次元画像をレンダリングすることで新たな画像(レンダリング画像)を構築する。
The
レンダリングは任意の処理であってよく、例えば3次元コンピュータグラフィクスを含む。3次元コンピュータグラフィクスは、3次元座標系により定義された3次元空間内の仮想的な立体物(スタックデータ、ボリュームデータなどの3次元画像)を2次元情報に変換することにより立体感のある画像を作成する演算手法である。 Rendering may be any process, including, for example, three-dimensional computer graphics. 3D computer graphics creates images with a three-dimensional effect by converting virtual three-dimensional objects (three-dimensional images such as stack data and volume data) in a three-dimensional space defined by a three-dimensional coordinate system into two-dimensional information. It is a calculation method to create .
レンダリングの例として、ボリュームレンダリング、最大値投影(MIP)、最小値投影(MinIP)、サーフェスレンダリング、多断面再構成(MPR)、プロジェクション画像構築、シャドウグラム構築などがある。レンダリングの更なる例として、スリットランプ顕微鏡で得られた断面画像の再現、シャインプルーフ画像の形成などがある。また、レンダリング部92は、このようなレンダリングとともに適用される任意の処理を実行可能であってよい。
Examples of rendering include volume rendering, maximum intensity projection (MIP), minimum intensity projection (MinIP), surface rendering, multiplanar reconstruction (MPR), projection image construction, shadowgram construction, and the like. Further examples of rendering include the reproduction of cross-sectional images obtained with a slit lamp microscope, the formation of Scheimpflug images, etc. Further, the
レンダリング部92は、前眼部の3次元画像において所定の部位に相当する領域を特定することができる。例えば、レンダリング部92は、角膜前面に相当する領域、角膜後面に相当する領域、水晶体前面に相当する領域、水晶体後面に相当する領域などを特定することができる。このような画像領域特定には、例えば、セグメンテーション、エッジ検出、閾値処理など、公知の画像処理が適用される。
The
なお、3次元画像は、典型的にはスタックデータ又はボリュームデータである。3次元画像に対する断面の指定は、手動又は自動で行われる。 Note that the three-dimensional image is typically stack data or volume data. Designation of a cross section for a three-dimensional image is performed manually or automatically.
3次元画像の断面を手動で指定する場合、レンダリング部92は、3次元画像をレンダリングして、手動断面指定のための表示画像を構築する。表示画像は、典型的には観察対象となる部位の全体を表す画像であり、例えば、角膜前面から水晶体後面までの部位を表す。表示画像を構築するためのレンダリングは、典型的には、ボリュームレンダリング又はサーフェスレンダリングである。
When manually specifying a cross section of a three-dimensional image, the
制御部7は、レンダリング部92により構築された表示画像を、図示しない表示デバイスに表示させる。ユーザーは、ポインティングデバイスなどの操作デバイスを用いて、表示画像に対して所望の断面を指定する。表示画像に指定された断面の位置情報がレンダリング部92に入力される。
The
表示画像は3次元画像のレンダリング画像であるから、表示画像と3次元画像との間には自明な位置の対応関係がある。この対応関係に基づき、レンダリング部92は、表示画像に指定された断面の位置に対応する、3次元画像における断面の位置を特定する。つまり、レンダリング部92は、3次元画像に対して断面を指定する。
Since the displayed image is a rendered image of a three-dimensional image, there is an obvious positional correspondence between the displayed image and the three-dimensional image. Based on this correspondence, the
更に、レンダリング部92は、3次元画像を当該断面で切断して3次元部分画像を構築することができる。レンダリング部92は、この3次元部分画像をレンダリングして表示用の画像を構築することができる。このようなレンダリングの例、3次元部分画像の例、3次元部分画像に基づく表示用画像の例などについては、後述する。
Furthermore, the
3次元画像の断面を自動で指定する場合、例えば、データ処理部8E(例えばレンダリング部92)は、3次元画像を解析して、前眼部の所定部位に相当する位置又は領域を特定することができる。例えば、角膜前面を特定することや、角膜前面の頂点位置を特定することや、水晶体後面を特定することや、水晶体後面の頂点位置を特定することが可能である。
When automatically specifying a cross section of a three-dimensional image, for example, the
また、データ処理部8E(例えばレンダリング部92)は、3次元画像にセグメンテーションを適用して、所定部位に相当する画像領域を特定することができる。例えば、角膜前面に相当する2次元領域、角膜に相当する3次元領域、水晶体に相当する3次元領域、水晶体後面に相当する3次元領域、前房に相当する3次元領域などを特定することが可能である。
Further, the
データ処理部8E(例えばレンダリング部92)は、このようにして特定された位置や領域に基づいて、3次元画像に対して断面を指定することができる。例えば、角膜前面の頂点位置と水晶体後面の頂点位置とを通過する平面を断面として指定することや、水晶体前面に相当する曲面を断面として指定することが可能である。
The
3次元画像に対して断面が指定されたときにレンダリング部92が構築できる画像は3次元部分画像に限定されない。例えば、3次元画像に対して断面が指定されたとき、レンダリング部92は、当該断面を表す2次元断面画像を構築することができる。このようなレンダリングの例、2次元断面画像の例、2次元断面画像に基づく表示用画像の例などについては、後述する。
The image that the
3次元画像に対して指定可能な位置情報は、平面状又は曲面状の2次元領域である断面に限定されない。3次元領域に指定可能な位置情報の他の例として、スライスがある。スライスは、所定の厚みを有する3次元領域であり、典型的には、一様な厚みを有する薄片である。 The positional information that can be specified for a three-dimensional image is not limited to a cross section that is a two-dimensional area that is planar or curved. Another example of positional information that can be specified in a three-dimensional area is a slice. A slice is a three-dimensional region of predetermined thickness, typically a thin section of uniform thickness.
3次元画像に対してスライスが指定されたとき、レンダリング部92は、当該スライスに対応する3次元スライス画像を構築することができる。レンダリング部92は、この3次元スライス画像をレンダリングして表示用の画像を構築することができる。このようなレンダリングの例、3次元スライス画像の例、3次元スライス画像に基づく表示用画像の例などについては、後述する。
When a slice is designated for a three-dimensional image, the
本実施形態により奏される効果を説明する。 The effects achieved by this embodiment will be explained.
本実施形態は、3次元画像構築部91により構築された3次元画像をレンダリングしてレンダリング画像を構築するレンダリング部92を含む。これにより、3次元画像構築部91により構築された3次元画像に基づくレンダリング画像を表示することができ、前眼部の所望の部位を観察することが可能になる。
This embodiment includes a
レンダリングの手法は任意である。例えば、3次元画像に対して断面が指定されたとき、レンダリング部92は、この断面で3次元画像を切断して3次元部分画像を構築することができる。これにより、前眼部の所望の断面を観察できるとともに、前眼部の3次元形態を把握することも可能である。
The rendering method is arbitrary. For example, when a cross section is specified for a three-dimensional image, the
他の例において、3次元画像に対して断面が指定されたとき、レンダリング部92は、当該断面を表す2次元断面画像を構築することができる。これにより、前眼部の所望の断面を観察することが可能である。
In another example, when a cross section is specified for a three-dimensional image, the
更に他の例において、3次元画像に対してスライスが指定されたとき、レンダリング部92は、当該スライスに対応する3次元スライス画像を構築することができる。これにより、前眼部の所望のスライスを観察することが可能である。
In yet another example, when a slice is specified for a three-dimensional image, the
〈第9実施形態〉
第1~第8実施形態に係るスリットランプ顕微鏡では、照明光軸と撮影光軸とが所定の角度をなしており、照明系及び撮影系はシャインプルーフカメラとして機能する。このようなスリットランプ顕微鏡により得られる画像は歪みを伴う。この歪みは、典型的には台形歪みである。
<Ninth embodiment>
In the slit lamp microscopes according to the first to eighth embodiments, the illumination optical axis and the photographing optical axis form a predetermined angle, and the illumination system and the photographing system function as a Scheimpflug camera. Images obtained by such a slit lamp microscope are accompanied by distortion. This distortion is typically a trapezoidal distortion.
本実施形態では歪み補正について説明する。この歪み補正は、典型的には台形補正(キーストーン補正)である。台形補正は周知技術であり、例えば特開2017-163465号公報(米国特許出願公開第2017/0262163号明細書)に開示されている。 In this embodiment, distortion correction will be explained. This distortion correction is typically trapezoidal correction (keystone correction). Keystone correction is a well-known technique, and is disclosed in, for example, Japanese Patent Application Publication No. 2017-163465 (US Patent Application Publication No. 2017/0262163).
前述したように、前眼部において(つまり実空間において)、スリット光照射領域はZ方向に広がりを有し、スリット幅を無視すると、典型的にはYZ平面において定義される。一方、撮影系の光軸は、スリット光を照射する照明系の光軸に対してX方向に傾斜している。したがって、前眼部の撮影対象領域は、被検眼の表面に近づくほど大きく描出され、眼底に近づくほど小さく描出される。したがって、(少なくとも)Z方向における台形歪みが生じる。 As described above, in the anterior segment of the eye (that is, in real space), the slit light irradiation area has an extension in the Z direction, and if the slit width is ignored, it is typically defined in the YZ plane. On the other hand, the optical axis of the imaging system is inclined in the X direction with respect to the optical axis of the illumination system that irradiates the slit light. Therefore, the area to be imaged in the anterior segment of the eye is depicted larger as it approaches the surface of the eye to be examined, and smaller as it approaches the fundus. Therefore, a trapezoidal distortion in (at least) the Z direction occurs.
図15に示すデータ処理部8Fは歪み補正部93を含む。歪み補正部93は、第1~第8実施形態のいずれにも組み合わせ可能である。歪み補正部93は、撮影系3(左撮影系30L、右撮影系30R)により取得された前眼部画像に対して歪み補正を適用する。
The
より具体的には、歪み補正部93は、照明光軸2a(20a)と撮影光軸3a(30La、30Ra)とがなす角度である光軸角度θ(θL、θR)に起因する歪みを補正するための処理(台形補正)を、照明系2(20)及び撮影系3(30L、30R)の移動と並行して撮影系3(30L、30R)により取得された複数の画像のうちの少なくとも1つに適用する。
More specifically, the
歪み補正が適用される画像は、撮影系3(30L、30R)により取得された前眼部画像自体には限定されず、撮影系3(30L、30R)により取得された前眼部画像から抽出されたスリット光照射領域などであってもよい。よって、前眼部画像の歪みを補正した後にスリット光照射領域を抽出してもよいし、逆に、前眼部画像からスリット光照射領域を抽出した後に、このスリット光照射領域の歪みを補正してもよい。 The image to which distortion correction is applied is not limited to the anterior segment image itself acquired by the imaging system 3 (30L, 30R), but may be extracted from the anterior segment image acquired by the imaging system 3 (30L, 30R). It may also be a slit light irradiation area. Therefore, the slit light irradiation area may be extracted after correcting the distortion of the anterior eye segment image, or conversely, after the slit light irradiation area is extracted from the anterior eye segment image, the distortion of this slit light irradiation area may be corrected. You may.
また、第3実施形態や第4実施形態における「画像群」のように、撮影系3(30L、30R)により取得された前眼部画像のうちから選択された前眼部画像の歪みを補正することや、撮影系3(30L、30R)により取得された前眼部画像を加工して得られた画像の歪みを補正することも含む。よって、前眼部画像の歪みを補正した後に前眼部画像の選択・加工を行ってもよいし、前眼部画像の選択又は加工を行った後に選択画像又は加工画像の歪みを補正してもよい。 In addition, like the "image group" in the third embodiment and the fourth embodiment, distortion of the anterior segment image selected from among the anterior segment images acquired by the imaging system 3 (30L, 30R) is corrected. It also includes correcting the distortion of the image obtained by processing the anterior segment image obtained by the imaging system 3 (30L, 30R). Therefore, the selection and processing of the anterior segment image may be performed after correcting the distortion of the anterior segment image, or the distortion of the selected image or the processed image may be corrected after the selection or processing of the anterior segment image. Good too.
典型的な実施形態において、スリットランプ顕微鏡は、図1又は図5に示す光学系を備え、歪み補正部93によってYZ平面における歪みが補正される。
In a typical embodiment, the slit lamp microscope includes the optical system shown in FIG. 1 or 5, and distortion in the YZ plane is corrected by the
図1に示す例において、撮影光軸3aは、照明光軸2aに対して、照明光軸2aに沿う第1方向(Z方向)及びスリット光の長手方向に沿う第2方向(Y方向)の双方に直交する第3方向(X方向)に傾斜して配置されている。ここで、照明光軸2aと撮影光軸3aとがなす光軸角度は、図1に示す角度θである。歪み補正部93は、第1方向(Z方向)及び第2方向(Y方向)の双方を含む平面(YZ平面)における歪みを補正するための処理を、撮影系3により取得された前眼部画像に適用することができる。
In the example shown in FIG. 1, the photographing
図5に示す例において、左撮影光軸30Laは、照明光軸20aに対して、照明光軸20aに沿う第1方向(Z方向)及びスリット光の長手方向に沿う第2方向(Y方向)の双方に直交する第3方向(X方向)に傾斜して配置されている。ここで、照明光軸20aと左撮影光軸30Laとがなす光軸角度は、図5に示す角度θLである。歪み補正部93は、第1方向(Z方向)及び第2方向(Y方向)の双方を含む平面(YZ平面)における歪みを補正するための処理を、左撮影光軸30Laにより取得された前眼部画像に適用することができる。
In the example shown in FIG. 5, the left photographing optical axis 30La is arranged in a first direction (Z direction) along the illumination
同様に、右撮影光軸30Raは、照明光軸20aに対して、照明光軸20aに沿う第1方向(Z方向)及びスリット光の長手方向に沿う第2方向(Y方向)の双方に直交する第3方向(X方向)に傾斜して配置されている。ここで、照明光軸20aと右撮影光軸30Raとがなす光軸角度は、図5に示す角度θRである。歪み補正部93は、第1方向(Z方向)及び第2方向(Y方向)の双方を含む平面(YZ平面)における歪みを補正するための処理を、右撮影光軸30Raにより取得された前眼部画像に適用することができる。
Similarly, the right photographing optical axis 30Ra is orthogonal to both the first direction (Z direction) along the illumination
一般的な台形補正は、矩形を歪ませて台形化した形状を元の矩形に戻すように行われる。本実施形態では、このような標準的な台形補正を適用することも可能であるが、以下に説明するように、他の台形補正を適用することが有効な場合もある。 Typical trapezoidal correction is performed by distorting a rectangle to return a trapezoidal shape to its original rectangle. In this embodiment, it is also possible to apply such standard keystone correction, but as described below, it may be effective to apply other keystone correction.
一般に、スリットランプ顕微鏡を用いて前眼部の光切片(つまりスリット光照射領域)を観察する際には、照明系の光軸(照明光軸)に対して観察系の光軸(観察光軸)が傾斜される。よって、ユーザーは、Z方向に延びる光切片を斜めから観察する。このとき、照明光軸と観察光軸とがなす角度(観察角度)は、典型的には既定の値である(例えば、17.5度、30度、又は45度)。この既定値を基準角度(α)と呼ぶ。 Generally, when observing a light section of the anterior segment of the eye (i.e. slit light irradiation area) using a slit lamp microscope, the optical axis of the observation system (observation optical axis) is ) is tilted. Therefore, the user obliquely observes the optical section extending in the Z direction. At this time, the angle between the illumination optical axis and the observation optical axis (observation angle) is typically a predetermined value (for example, 17.5 degrees, 30 degrees, or 45 degrees). This default value is called the reference angle (α).
基準角度αと光軸角度β(θ、θL、θR)とに基づいて、歪み補正(台形補正)の補正係数を設定することができる。少なくとも1つの基準角度αと、少なくとも1つの光軸角度β(θ、θL、θR)とについて、補正係数が設定される。2つ以上の基準角度と1つの光軸角度との組み合わせのそれぞれについて補正係数を設定することや、1つの基準角度と2つ以上の光軸角度との組み合わせのそれぞれについて補正係数を設定することや、2つ以上の基準角度と2つ以上の光軸角度との組み合わせのそれぞれについて補正係数を設定することも可能である。一般に、基準角度α及び光軸角度βの一方又は双方を変数とする離散的又は連続的な補正係数C(α、β)を設定することが可能である。 A correction coefficient for distortion correction (keystone correction) can be set based on the reference angle α and the optical axis angle β (θ, θL, θR). Correction coefficients are set for at least one reference angle α and at least one optical axis angle β (θ, θL, θR). Setting a correction coefficient for each combination of two or more reference angles and one optical axis angle, or setting a correction coefficient for each combination of one reference angle and two or more optical axis angles. Alternatively, it is also possible to set a correction coefficient for each combination of two or more reference angles and two or more optical axis angles. Generally, it is possible to set a discrete or continuous correction coefficient C (α, β) using one or both of the reference angle α and the optical axis angle β as variables.
このようにして設定された1以上の補正係数C(α、β)は歪み補正部93に格納される。歪み補正部93は、補正係数C(α、β)に基づいて歪みを補正するための処理を実行することができる。
One or more correction coefficients C (α, β) set in this way are stored in the
補正係数C(α、β)が複数の値を提供する場合、歪み補正部93又はユーザーは、基準角度α及び光軸角度βの一方又は双方を指定する。歪み補正部93は、この指定の結果に応じた補正係数を適用する。このような構成は、例えば、光軸角度βが可変なスリットランプ顕微鏡が適用される場合に適用され、光軸角度ベータの可変範囲における複数の補正係数を示すテーブルやグラフが準備される。
When the correction coefficient C (α, β) provides a plurality of values, the
補正係数を示す情報を準備する代わりに、次の構成を適用することが可能である。すなわち、本例の歪み補正部は、補正係数を算出するための所定の演算式を予め記憶する。更に、本例の歪み補正部は、基準角度α及び/又は光軸角度βの入力を受け、この入力値を演算式に代入して補正係数を算出する。本例の歪み補正部は、算出された補正係数を用いて歪み補正を実行する。 Instead of preparing information indicating correction coefficients, it is possible to apply the following configuration. That is, the distortion correction section of this example stores in advance a predetermined arithmetic expression for calculating the correction coefficient. Furthermore, the distortion correction section of this example receives input of the reference angle α and/or the optical axis angle β, and calculates a correction coefficient by substituting the input values into the arithmetic expression. The distortion correction unit of this example executes distortion correction using the calculated correction coefficient.
本実施形態により奏される効果を説明する。 The effects achieved by this embodiment will be explained.
本実施形態は、歪み補正部93を含む。図1に示す構成において、歪み補正部93は、移動機構6による照明系2及び撮影系3の移動と並行して撮影系3が繰り返し撮影を行うことにより取得した複数の画像のうちの少なくとも1つに対し、照明系2の光軸2aと撮影系3の光軸3aとがなす角度である光軸角度θに起因する歪みを補正するための処理を適用することができる。なお、図5に示す構成や他の構成が採用される場合においても同様である。
This embodiment includes a
このような構成によれば、光軸角度θに起因する歪みが補正された好適な画像を提供することが可能になる。 According to such a configuration, it is possible to provide a suitable image in which distortion caused by the optical axis angle θ is corrected.
図1に示す構成において、撮影系3に含まれる光学系4の光軸3aは、照明系2の光軸2aに対して、照明系2の光軸2aに沿う第1方向(Z方向)及びスリット光の長手方向に沿う第2方向(Y方向)の双方に直交する第3方向(X方向)に傾斜して配置されている。歪み補正部93は、第1方向及び第2方向の双方を含む平面(YZ平面)における歪みを補正するための処理を実行することができる。図5に示す構成や他の構成が採用される場合においても同様である。
In the configuration shown in FIG. 1, the
このような構成によれば、第1方向及び第2方向の双方を含む平面に台形歪みが発生すが、これを補正することが可能である。 According to such a configuration, trapezoidal distortion occurs in a plane including both the first direction and the second direction, but it is possible to correct this.
図1に示す構成において、歪み補正部93は、所定の基準角度αと光軸角度θとに基づき設定された補正係数Cを予め記憶している。歪み補正部93は、この補正係数Cに基づいて、光軸角度θに起因する歪みを補正するための処理を画像に適用することができる。図5に示す構成や他の構成が採用される場合においても同様である。
In the configuration shown in FIG. 1, the
〈第10実施形態〉
スリットランプ顕微鏡検査において、組織のサイズや形状、組織間の位置関係などを参照することがある。本実施形態では、そのための計測について説明する。
<10th embodiment>
In slit lamp microscopy, the size and shape of tissues, the positional relationships between tissues, etc. may be referred to. In this embodiment, measurement for this purpose will be explained.
図16に示すデータ処理部8Gは計測部94を含む。計測部94は、第1~第9実施形態のいずれかに組み合わせ可能である。
The
第1~第9実施形態に係るスリットランプ顕微鏡に計測部94を組み合わせた場合、計測部94は、スリット光を用いた前眼部スキャンにより取得された前眼部画像を解析することで、所定の計測値を求めることができる。
When the
3次元画像を構築可能なスリットランプ顕微鏡に計測部94を組み合わせた場合、計測部94は、3次元画像構築部82(84、85、86、88、91)により構築された3次元画像を解析することにより、所定の計測値を求めることができる。
When the measuring
計測は、例えば、組織の形態を示すパラメータ(厚み、径、面積、体積、角度、形状など)、組織間の関係を示すパラメータ(距離、方向など)に関して実行される。計測のための解析は、例えば、組織又はその輪郭を特定するためのセグメンテーションを含む。 Measurement is performed regarding, for example, parameters indicating the morphology of tissues (thickness, diameter, area, volume, angle, shape, etc.) and parameters indicating relationships between tissues (distance, direction, etc.). Analysis for measurement includes, for example, segmentation to identify tissue or its contours.
このような本実施形態によれば、前眼部の観察や診断に有効なパラメータについて計測を行うことが可能である。 According to this embodiment, it is possible to measure parameters effective for observation and diagnosis of the anterior segment of the eye.
歪み補正を実行可能な第9実施形態に計測部94を組み合わせることで、歪み補正が適用された画像に基づき計測を行うことができる。これにより、計測確度の向上や計測精度の向上を図ることが可能となる。
By combining the
〈第11実施形態〉
第2実施形態の動画撮影系40のように、スリット光を用いた前眼部スキャンと並行して前眼部を固定位置から動画撮影する機能をスリットランプ顕微鏡が備える場合、本実施形態に係る機能を更に付加することができる。
<Eleventh embodiment>
When the slit lamp microscope is equipped with a function of capturing a video of the anterior eye segment from a fixed position in parallel with scanning the anterior eye segment using slit light, as in the
本実施形態の制御部7Aは移動制御部71を含み、データ処理部8Hは運動検出部95を含む。また、本実施形態は、動画撮影系40を含む。動画撮影系40は、スリット光を用いた前眼部スキャンと並行して前眼部を固定位置から動画撮影する。
The
運動検出部95は、動画撮影系40により取得される動画像を解析して被検眼Eの運動を検出する。この運動検出は、動画撮影系40と並行して実行される。
The
例えば、運動検出部95は、まず、動画撮影系40から逐次に入力されるフレームを解析して所定部位に相当する画像領域を特定する。所定部位は、典型的には、瞳孔の中心、重心、輪郭などであってよい。画像領域特定は、画素に割り当てられた輝度情報に基づき行われる。運動検出部95は、前眼部の画像における低輝度の画像領域を瞳孔領域として特定し、この瞳孔領域の重心又は輪郭を特定することができる。或いは、運動検出部95は、瞳孔領域の近似円又は近似楕円を求め、その中心又は輪郭を特定することが可能である。
For example, the
このように、運動検出部95は、動画撮影系40から入力されるフレーム中の特徴点を逐次に求める。更に、運動検出部95は、逐次に特定される特徴点の位置の時間変化を求める。動画撮影系40は固定配置されているので、このような処理により運動検出部95は被検眼Eの運動を(リアルタイムで)検出することが可能である。
In this way, the
移動制御部71は、運動検出部95からの出力に基づいて移動機構6を制御することができる。より具体的に説明すると、運動検出部95は、動画撮影系40から逐次に入力されるフレーム中の特徴点の位置の時間変化を示す情報を、移動制御部71に逐次に入力する。移動制御部71は、運動検出部95から逐次に入力される情報にしたがって移動機構6を制御する。この移動制御は、被検眼Eの運動に起因するアライメント状態の変化を打ち消すように実行される。このような動作はトラッキングを呼ばれる。
The
このような本実施形態によれば、スリット光を用いた前眼部スキャン中に被検眼Eが動いたとき、この動きに応じてアライメント状態が自動で補正される。これにより、被検眼の運動の影響を受けることなく、スリット光を用いた前眼部スキャンを行うことが可能である。 According to this embodiment, when the subject's eye E moves during anterior segment scanning using slit light, the alignment state is automatically corrected in accordance with this movement. Thereby, it is possible to perform an anterior segment scan using slit light without being affected by the movement of the subject's eye.
〈使用形態〉
実施形態に係るスリットランプ顕微鏡の例示的な使用形態を説明する。ここでは、図5に示す光学系が適用される。テーブル、イス、顎受け台の調整、撮影開始の指示、アライメントなどは、前述した要領で行われる。
<Usage form>
An exemplary usage form of the slit lamp microscope according to the embodiment will be described. Here, the optical system shown in FIG. 5 is applied. Adjustment of the table, chair, chin rest, instruction to start imaging, alignment, etc. are performed in the same manner as described above.
まず、第6実施形態で説明したように、前眼部に照射されるスリット光の長手方向が左右方向(X方向)に一致するように、制御部7が回転機構62を制御する。左撮影系30L又は右撮影系30Rは、当該向きのスリット光が照射されている前眼部を撮影する。
First, as described in the sixth embodiment, the
これにより、図18に示す前眼部画像H0が取得される。前眼部画像H0には、左右方向(X方向)を長手方向とするスリット光が照射されている領域であるスリット光照射領域J0が含まれている。 As a result, the anterior segment image H0 shown in FIG. 18 is obtained. The anterior segment image H0 includes a slit light irradiation region J0, which is a region irradiated with slit light whose longitudinal direction is the left-right direction (X direction).
なお、左撮影系30L及び右撮影系30Rの双方が前眼部を撮影してもよい。この場合、スリット光照射領域を斜め上方から撮影した画像と、斜め下方から撮影した画像とが得られる。
Note that both the
次に、前眼部に照射されるスリット光の長手方向が上下方向(Y方向)に一致するように、制御部7が回転機構62を制御する。制御部7は、スリット光を用いた前眼部スキャンを実行するように、照明系20、左撮影系30L、右撮影系30R、及び移動機構6を制御する。すなわち、左撮影系30L及び右撮影系30Rのそれぞれが、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して、被検眼Eの前眼部を繰り返し撮影する。
Next, the
これにより、左撮影系30Lは、図19Aに示すN枚の前眼部画像HL1~HLNを含む第1画像群を取得し、右撮影系30Rは、図19Bに示すN枚の前眼部画像HR1~HRNを含む第2画像群を取得する。左撮影系30Lにより取得された前眼部画像HLnには、斜め左方から撮影されたスリット光照射領域JLnが描出されている(n=1、2、・・・、N)。右撮影系30Rにより取得された前眼部画像HRnには、斜め右方から撮影されたスリット光照射領域JRnが描出されている(n=1、2、・・・、N)。
As a result, the
ここで、前述した画像ペアリングにより、前眼部画像HLnと前眼部画像HRnとが互いに対応付けられているものとする(n=1、2、・・・、N)。実際の前眼部スキャンでは、後に構築される3次元画像の解像度を考慮し、左右それぞれの前眼部画像の枚数Nは200以上に設定される。なお、枚数Nは任意である。 Here, it is assumed that the anterior segment image HLn and the anterior segment image HRn are associated with each other through the image pairing described above (n=1, 2, . . . , N). In an actual anterior segment scan, the number N of left and right anterior segment images is set to 200 or more, taking into consideration the resolution of the three-dimensional images that will be constructed later. Note that the number N is arbitrary.
図20は、実際に行われた前眼部スキャンで取得された前眼部画像を示す。これら前眼部画像のそれぞれには、高輝度で提示されたスリット光照射領域が含まれている。 FIG. 20 shows an anterior segment image obtained in an actually performed anterior segment scan. Each of these anterior segment images includes a slit light irradiation area presented with high brightness.
続いて、第7実施形態(図13)の画像領域抽出部89が、前眼部画像HLnからスリット光照射領域JLnを抽出し、且つ、前眼部画像HRnからスリット光照射領域JRnを抽出する。図21Aは、複数の前眼部画像HL1~HLNからそれぞれ構築された複数のスリット光照射領域画像KL1~KLNを示す。図21Bは、複数の前眼部画像HR1~HRNからそれぞれ構築された複数のスリット光照射領域画像KR1~KRNを示す。
Subsequently, the image
次に、第3実施形態又は第4実施形態に係る処理を、スリット光照射領域画像KLn及びスリット光照射領域画像KRnに適用することで、アーティファクトを含まない複数のスリット光照射領域画像が得られる。図22に例示する複数のスリット光照射領域画像K1~KNは、いずれもアーティファクトを含まない。スリット光照射領域画像K1~KNは、それぞれ、スリット光照射領域J1~JNを含む。 Next, by applying the processing according to the third embodiment or the fourth embodiment to the slit light irradiation area image KLn and the slit light irradiation area image KRn, a plurality of slit light irradiation area images that do not include artifacts can be obtained. . None of the plurality of slit light irradiation area images K1 to KN illustrated in FIG. 22 include artifacts. The slit light irradiation area images K1 to KN each include slit light irradiation areas J1 to JN.
続いて、スリット光照射領域画像K1~KNのそれぞれに対し、第9実施形態で説明した歪み補正(台形補正)を適用する。これにより、アーティファクトを含まず、且つ、歪みが補正された、複数のスリット光照射領域画像が得られる。図23に例示する複数のスリット光照射領域画像P1~PNは、いずれもアーティファクトを含まない。更に、スリット光照射領域画像P1~PNは、それぞれ、スリット光照射領域Q1~QNを含む。 Subsequently, the distortion correction (keystone correction) described in the ninth embodiment is applied to each of the slit light irradiation area images K1 to KN. As a result, a plurality of slit light irradiation area images that do not contain artifacts and have their distortions corrected are obtained. None of the plurality of slit light irradiation area images P1 to PN illustrated in FIG. 23 include artifacts. Furthermore, the slit light irradiation area images P1 to PN include slit light irradiation areas Q1 to QN, respectively.
次に、第6実施形態の画像位置決定部87が、図18に示す前眼部画像H0に基づいて、複数のスリット光照射領域画像P1~PNの相対位置を決定する。例えば、画像位置決定部87は、前眼部画像H0に描出された角膜前面に相当する画像領域(スリット光照射領域J0における曲率半径が小さい方のカーブ)に基づいて、スリット光照射領域画像P1~PNを配列する。これにより、角膜前面のカーブに合わせてスリット光照射領域画像P1~PNが配列される。
Next, the image
第6実施形態の3次元画像構築部86は、角膜前面のカーブに合わせて配列された複数のスリット光照射領域画像P1~PNに基づいて3次元画像を構築する。この3次元画像は、アーティファクトを含まず、且つ、その歪みが補正されている。
The three-dimensional
続いて、データ処理部8は、前眼部スキャン時に前眼部に投影されたスリット光の長さ(Y方向の寸法)と、移動機構6によるスリット光の移動距離(X方向の寸法)とに基づいて、3次元画像の縦横比を補正する。これにより、3次元画像のX方向の寸法とY方向の寸法との比率が補正される。
Next, the
次に、第10実施形態の計測部94が、3次元画像を解析して所定の計測値を求める。計測パラメータの例として、角膜前面曲率、角膜前面曲率半径、角膜後面曲率、角膜後面曲率半径、角膜径、角膜厚、角膜トポグラフィ、前房深度、隅角、水晶体前面曲率、水晶体前面曲率半径、水晶体後面曲率、水晶体後面曲率半径、水晶体厚などがある。
Next, the
図24は、実際に取得された3次元画像をボリュームレンダリングして得られた表示画像R0を示す。レンダリングは、第8実施形態のレンダリング部92により実行される。制御部7は、表示画像R0を図示しない表示デバイスに表示させる。表示画像R0は、角膜前面及び水晶体後面により画成された部位を描出している。
FIG. 24 shows a display image R0 obtained by volume rendering an actually obtained three-dimensional image. Rendering is performed by the
ユーザーは、表示デバイスに表示された表示画像R0を観察し、図示しない操作デバイスを用いて所望の断面を指定することができる。図25に示す点線は、ユーザーが表示画像R0に対して指定した断面の位置を示す。 The user can observe the display image R0 displayed on the display device and specify a desired cross section using an operation device (not shown). The dotted line shown in FIG. 25 indicates the position of the cross section specified by the user with respect to the display image R0.
レンダリング部92は、ユーザーにより指定された断面で3次元画像を切断することにより3次元部分画像を構築することができる。図26に示す画像R1は、図25に示す断面で3次元画像を切断して得られた3次元部分画像をレンダリングして得られた表示画像である。この表示画像のことも3次元部分画像R1と呼ぶ。3次元部分画像R1は、図25に示す断面を外面の一部とする、前眼部の3次元領域を表す画像である。
The
また、レンダリング部92は、ユーザーにより指定された断面を表す2次元断面画像を構築することができる。図27に示す画像R2は、図25に示す断面で3次元画像を切断して得られた2次元断面画像である。
Furthermore, the
ユーザーは、表示デバイスに表示された表示画像R0を観察し、図示しない操作デバイスを用いて所望のスライスを指定することができる。図28に示す2つの点線は、ユーザーが表示画像R0に対して指定したスライスを画成する2つの断面の位置を示す。つまり、これら2つの断面で挟まれた領域が、ユーザーが表示画像R0に対して指定したスライスである。 The user can observe the display image R0 displayed on the display device and specify a desired slice using an operation device (not shown). The two dotted lines shown in FIG. 28 indicate the positions of two cross sections defining the slice specified by the user for the display image R0. In other words, the area sandwiched between these two cross sections is the slice designated by the user for display image R0.
レンダリング部92は、ユーザーにより指定されたスライスに対応する3次元スライス画像を構築することができる。図29に示す画像R3は、図28に示す断面で3次元画像を切断して得られた3次元スライス画像をレンダリングして得られた表示画像である。この表示画像のことも3次元スライス画像R3と呼ぶ。3次元スライス画像R3は、図28に示す2つの断面を外面の一部とする、前眼部の3次元領域を表す画像である。
The
ユーザーは、3次元画像をレンダリングして前眼部の外面や所望の断面を観察したり、第10実施形態の計測を行ったりすることにより、前眼部の状態を把握することができる。そして、読影レポートを作成することができる。 The user can grasp the state of the anterior segment by rendering a three-dimensional image and observing the outer surface or desired cross section of the anterior segment, or by performing the measurement according to the tenth embodiment. Then, an interpretation report can be created.
〈第12実施形態〉
本実施形態では、眼科撮影装置と情報処理装置とを含む眼科システムについて説明する。眼科撮影装置は、少なくともスリットランプ顕微鏡としての機能を有する。眼科撮影装置に含まれるスリットランプ顕微鏡は、第1~第11実施形態のいずれかのスリットランプ顕微鏡であってよい。以下、第1~第11実施形態で説明した要素や構成や符号を適宜に準用する。
<Twelfth embodiment>
In this embodiment, an ophthalmologic system including an ophthalmologic imaging device and an information processing device will be described. The ophthalmologic imaging device has at least the function of a slit lamp microscope. The slit lamp microscope included in the ophthalmologic imaging apparatus may be the slit lamp microscope of any one of the first to eleventh embodiments. Hereinafter, the elements, configurations, and symbols described in the first to eleventh embodiments will be applied as appropriate.
図30に例示された眼科システム1000は、眼科撮影が行われるT個の施設(第1施設~第T施設)のそれぞれと、サーバ4000と、遠隔端末5000mとを結ぶ通信路(通信回線)1100を利用して構築されている。
The
ここで、眼科撮影は、スリットランプ顕微鏡を用いた前眼部撮影を少なくとも含む。この前眼部撮影は、少なくとも、第1~第11実施形態で説明した、スリット光を用いた前眼部スキャンを含む。 Here, the ophthalmologic imaging includes at least anterior segment imaging using a slit lamp microscope. This anterior eye segment imaging includes at least the anterior eye segment scan using slit light as described in the first to eleventh embodiments.
各施設(第t施設:t=1~T、Tは1以上の整数)には、眼科撮影装置2000-it(it=1~Kt、Ktは1以上の整数)が設置されている。つまり、各施設(第t施設)には、1以上の眼科撮影装置2000-itが設置されている。眼科撮影装置2000-itは、眼科システム1000の一部を構成する。なお、眼科以外の検査を実施可能な検査装置が眼科システム1000に含まれていてもよい。
Each facility (t-th facility: t = 1 to T, T is an integer of 1 or more) is equipped with an ophthalmological imaging device 2000-i t (i t =1 to K t , K t is an integer of 1 or more). ing. In other words, each facility (t-th facility) has one or more ophthalmology imaging devices 2000- it installed. The ophthalmology imaging device 2000- it constitutes a part of the
本例の眼科撮影装置2000-itは、被検眼の撮影を実施する「撮影装置」としての機能と、各種データ処理や外部装置との通信を行う「コンピュータ」としての機能の双方を備えている。他の例において、撮影装置とコンピュータとを別々に設けることが可能である。この場合、撮影装置とコンピュータとは互いに通信可能に構成されてよい。更に、撮影装置の数とコンピュータの数とはそれぞれ任意であり、例えば単一のコンピュータと複数の撮影装置とを設けることができる。 The ophthalmologic imaging device 2000- it of this example has both the functions of an "imaging device" that performs imaging of the subject's eye, and the functions of a "computer" that processes various data and communicates with external devices. There is. In other examples, the imaging device and computer can be provided separately. In this case, the photographing device and the computer may be configured to be able to communicate with each other. Further, the number of photographing devices and the number of computers are arbitrary, and for example, a single computer and a plurality of photographing devices can be provided.
眼科撮影装置2000-itにおける「撮影装置」は、少なくともスリットランプ顕微鏡を含む。このスリットランプ顕微鏡は、第1~第11実施形態のいずれかのスリットランプ顕微鏡であってよく、第1実施形態の構成(図1)又は第2実施形態の構成(図5)を少なくとも含む。 The "imaging device" in the ophthalmological imaging device 2000 -it includes at least a slit lamp microscope. This slit lamp microscope may be a slit lamp microscope according to any of the first to eleventh embodiments, and includes at least the configuration of the first embodiment (FIG. 1) or the configuration of the second embodiment (FIG. 5).
更に、各施設(第t施設)には、補助者や被検者により使用可能な情報処理装置(端末3000-t)が設置されている。端末3000-tは、当該施設において使用されるコンピュータであり、例えば、タブレット端末やスマートフォン等のモバイル端末、当該施設に設置されたサーバなどであってよい。更に、端末3000-tは、無線型イヤフォン等のウェアラブルデバイスを含んでいてもよい。なお、端末3000-tは、当該施設においてその機能を使用可能なコンピュータであれば十分であり、例えば、当該施設の外に設置されたコンピュータ(クラウドサーバ等)であってもよい。 Furthermore, each facility (t-th facility) is equipped with an information processing device (terminal 3000-t) that can be used by assistants and patients. The terminal 3000-t is a computer used in the facility, and may be, for example, a mobile terminal such as a tablet terminal or a smartphone, a server installed in the facility, or the like. Furthermore, terminal 3000-t may include a wearable device such as a wireless earphone. It is sufficient that the terminal 3000-t is a computer whose functions can be used in the facility; for example, it may be a computer (such as a cloud server) installed outside the facility.
眼科撮影装置2000-itと端末3000-tとは、第t施設内に構築されたネットワーク(施設内LAN等)や、広域ネットワーク(インターネット等)や、近距離通信技術を利用して通信を行えるように構成されてよい。 The ophthalmology imaging device 2000- it and the terminal 3000-t communicate using a network built within the t-facility (in-facility LAN, etc.), a wide area network (the Internet, etc.), or short-range communication technology. It may be configured so that it can be performed.
眼科撮影装置2000-itは、サーバ等の通信機器としての機能を備えていてよい。この場合、眼科撮影装置2000-itと端末3000-tとが直接に通信を行うように構成することができる。これにより、サーバ4000と端末3000-tとの間の通信を眼科撮影装置2000-itを介して行うことができるので、端末3000-tとサーバ4000との間で通信を行う機能を設ける必要がなくなる。
The ophthalmologic imaging apparatus 2000 -it may have a function as a communication device such as a server. In this case, the ophthalmologic imaging apparatus 2000- it and the terminal 3000-t can be configured to communicate directly. As a result, communication between the
サーバ4000は、典型的には、第1~第T施設のいずれとも異なる施設に設置され、例えば管理センタに設置されている。サーバ4000は、ネットワーク(LAN、広域ネットワーク等)を介して、遠隔端末5000m(m=1~M、Mは1以上の整数)と通信が可能である。更に、サーバ4000は、第1~第T施設に設置された眼科撮影装置2000-itの少なくとも一部との間で、広域ネットワークを介して通信が可能である。
The
サーバ4000は、例えば、眼科撮影装置2000-itと遠隔端末5000mとの間の通信を中継する機能と、この通信の内容を記録する機能と、眼科撮影装置2000-itにより取得されたデータや情報を記憶する機能と、遠隔端末5000mにより取得されたデータや情報を記憶する機能とを備える。サーバ4000は、データ処理機能を備えてもよい。
The
遠隔端末5000mは、眼科撮影装置2000-itによって取得された被検眼の画像(複数の前眼部画像、又は、これらに基づく3次元画像のレンダリング画像)の読影と、レポート作成とに使用可能なコンピュータを含む。遠隔端末5000mは、データ処理機能を備えてもよい。
The
サーバ4000について説明する。図31に例示されたサーバ4000は、制御部4010と、通信確立部4100と、通信部4200とを備える。
The
制御部4010は、サーバ4000の各部の制御を実行する。制御部4010は、その他の演算処理を実行可能であってよい。制御部4010はプロセッサを含む。制御部4010は、更に、RAM、ROM、ハードディスクドライブ、ソリッドステートドライブなどを含んでいてよい。
A
制御部4010は、通信制御部4011と転送制御部4012とを含む。
The
通信制御部4011は、複数の眼科撮影装置2000-itと複数の端末3000-tと複数の遠隔端末5000mとを含む複数の装置の間における通信の確立に関する制御を実行する。例えば、通信制御部4011は、眼科システム1000に含まれる複数の装置のうちから後述の選択部4120によって選択された2以上の装置のそれぞれに向けて、通信を確立するための制御信号を送る。
The
転送制御部4012は、通信確立部4100(及び通信制御部4011)により通信が確立された2以上の装置の間における情報のやりとりに関する制御を行う。例えば、転送制御部4012は、通信確立部4100(及び通信制御部4011)により通信が確立された少なくとも2つの装置のうちの一方の装置から送信された情報を他の装置に転送するように機能する。
具体例として、眼科撮影装置2000-itと遠隔端末5000mとの間の通信が確立された場合、転送制御部4012は、眼科撮影装置2000-itから送信された情報(例えば、スリット光を用いた前眼部スキャンで得られた複数の前眼部画像、又は、これら前眼部画像に基づき構築された3次元画像)を遠隔端末5000mに転送することができる。逆に、転送制御部4012は、遠隔端末5000mから送信された情報(例えば、眼科撮影装置2000-itへの指示、読影レポートなど)を眼科撮影装置2000-itに転送することができる。
As a specific example, when communication is established between the ophthalmological imaging apparatus 2000- it and the
転送制御部4012は、送信元の装置から受信した情報を加工する機能を有していてもよい。この場合、転送制御部4012は、受信した情報と、加工処理により得られた情報との少なくとも一方を転送先の装置に送信することができる。
The
例えば、転送制御部4012は、眼科撮影装置2000-it等から送信された情報の一部を抽出して遠隔端末5000m等に送信することができる。また、眼科撮影装置2000-it等から送信された情報(例えば、前眼部画像又は3次元画像)をサーバ4000又は他の装置によって解析し、その解析結果(及び元の情報)を遠隔端末5000m等に送信するようにしてもよい。
For example, the
眼科撮影装置2000-itから複数の前眼部画像が送信された場合、サーバ4000又は他の装置が、これら前眼部画像から3次元画像(例えば、スタックデータ又はボリュームデータ)を構築し、転送制御部4012が、構築された3次元画像を遠隔端末5000mに送信するように構成することが可能である。
When a plurality of anterior segment images are transmitted from the ophthalmological imaging device 2000- it , the
眼科撮影装置2000-itからスタックデータが送信された場合、サーバ4000又は他の装置が、このスタックデータからボリュームデータを構築し、転送制御部4012が、構築されたボリュームデータを遠隔端末5000mに送信するように構成することが可能である。
When stack data is transmitted from the ophthalmological imaging device 2000- it , the
サーバ4000又は他の装置により実行可能なデータ加工処理は、上記した例には限定されず、任意のデータ処理を含んでいてよい。例えば、サーバ4000又は他の装置は、3次元画像のレンダリング、アーティファクト除去、歪み補正、計測など、第1~第11実施形態で説明した任意の処理を実行可能であってよい。
The data processing processing that can be executed by the
通信確立部4100は、複数の眼科撮影装置2000-itと複数の端末3000-tと複数の遠隔端末5000mとを含む複数の装置のうちから選択された少なくとも2つの装置の間における通信を確立するための処理を実行する。本実施形態において「通信の確立」とは、例えば、(1)通信が切断された状態から一方向通信を確立すること、(2)通信が切断された状態から双方向通信を確立すること、(3)受信のみが可能な状態から送信も可能な状態に切り替えること、(4)送信のみが可能な状態から受信も可能な状態に切り替えること、のうちの少なくとも1つを含む概念である。
The
更に、通信確立部4100は、確立されている通信を切断する処理を実行可能である。本実施形態において「通信の切断」とは、例えば、(1)一方向通信が確立された状態から通信を切断すること、(2)双方向通信が確立された状態から通信を切断すること、(3)双方向通信が確立された状態から一方向通信に切り替えること、(4)送信及び受信が可能な状態から受信のみが可能な状態に切り替えること、(5)送信及び受信が可能な状態から送信のみが可能な状態に切り替えること、のうちの少なくとも1つを含む概念である。
Further, the
眼科撮影装置2000-it、端末3000-t、及び遠隔端末5000mのそれぞれは、他の装置(そのユーザー)を呼び出すための通信要求(呼び出し要求)と、他の2つの装置の間の通信に割り込むための通信要求(割り込み要求)とのうちの少なくとも一方をサーバ4000に送信することができる。呼び出し要求及び割り込み要求は、手動又は自動で発信される。サーバ4000(通信部4200)は、眼科撮影装置2000-it、端末3000-t、又は遠隔端末5000mから送信された通信要求を受信する。
Each of the ophthalmological imaging device 2000- it , the terminal 3000-t, and the
本実施形態において、通信確立部4100は選択部4120を含んでいてよい。選択部4120は、例えば、眼科撮影装置2000-it、端末3000-t、又は遠隔端末5000mから送信された通信要求に基づいて、眼科撮影装置2000-it、端末3000-t、及び遠隔端末5000mのうちから、当該通信要求を送信した装置以外の1以上の装置を選択する。
In this embodiment, the
選択部4120が実行する処理の具体例を説明する。眼科撮影装置2000-it又は端末3000-tからの通信要求(例えば、眼科撮影装置2000-itにより取得された画像の読影の要求)を受けた場合、選択部4120は、例えば、複数の遠隔端末5000mのうちのいずれかを選択する。通信確立部4100は、選択された遠隔端末5000mと、眼科撮影装置2000-it及び端末3000-tの少なくとも一方との間の通信を確立する。
A specific example of the process executed by the
通信要求に応じた装置の選択は、例えば、予め設定された属性に基づいて実行される。この属性の例として、検査の種別(例えば、撮影モダリティの種別、画像の種別、疾患の種別、候補疾患の種別など)や、要求される専門度・熟練度や、言語の種別などがある。本例に係る処理を実現するために、通信確立部4100は、予め作成された属性情報が記憶された記憶部4110を含んでいてよい。属性情報には、遠隔端末5000m及び/又はそのユーザー(医師、オプトメトリスト等)の属性が記録されている。
Selection of a device in response to a communication request is performed, for example, based on preset attributes. Examples of these attributes include the type of examination (for example, the type of imaging modality, the type of image, the type of disease, the type of candidate disease, etc.), the level of expertise/skill required, and the type of language. In order to implement the processing according to this example, the
ユーザーの識別は、事前に割り当てられたユーザーIDによって行われる。また、遠隔端末5000mの識別は、例えば、事前に割り当てられた装置IDやネットワークアドレスによって行われる。典型的な例において、属性情報は、各ユーザーの属性として、専門分野(例えば、診療科、専門とする疾患など)、専門度・熟練度、使用可能な言語の種別などを含む。
User identification is performed by a pre-assigned user ID. Further, the
選択部4120が属性情報を参照する場合、眼科撮影装置2000-it、端末3000-t、又は遠隔端末5000mから送信される通信要求は、属性に関する情報を含んでいてよい。例えば、眼科撮影装置2000-itから送信される読影要求(つまり、診断要求)は、次のいずれかの情報を含んでいてよい:(1)撮影モダリティの種別を示す情報;(2)画像の種別を示す情報;(3)疾患名や候補疾患名を示す情報;(4)読影の難易度を示す情報;(5)眼科撮影装置2000-it及び/又は端末3000-tのユーザーの使用言語を示す情報。
When the
このような読影要求を受信した場合、選択部4120は、この読影要求と記憶部4110に記憶された属性情報とに基づいて、いずれかの遠隔端末5000mを選択することができる。このとき、選択部4120は、読影要求に含まれる属性に関する情報と、記憶部4110に記憶された属性情報に記録された情報とを照合する。それにより、選択部4120は、例えば、次のいずれかの属性に該当する医師(又はオプトメトリスト)に対応する遠隔端末5000mを選択する:(1)当該撮影モダリティを専門とする医師;(2)当該画像種別を専門とする医師;(3)当該疾患(当該候補疾患)を専門とする医師;(4)当該難易度の読影が可能な医師;(5)当該言語を使用可能な医師。
When such an image interpretation request is received, the
なお、医師やオプトメトリストと、遠隔端末5000mとの間の対応付けは、例えば、遠隔端末5000m(又は眼科システム1000)へのログイン時に入力されたユーザーIDによってなされる。
Note that the correspondence between the doctor or optometrist and the
通信部4200は、他の装置(例えば、眼科撮影装置2000-it、端末3000-t、及び遠隔端末5000mのいずれか)との間でデータ通信を行う。データ通信の方式や暗号化については、眼科撮影装置2000-itに設けられた通信部(第1実施形態の通信部9)と同様であってよい。
The
サーバ4000は、データ処理部4300を含む。データ処理部4300は、各種のデータ処理を実行する。データ処理部4300は、眼科撮影装置2000-it(特に、スリットランプ顕微鏡)により取得された複数の前眼部画像又は3次元画像を処理することができる。データ処理部4300は、プロセッサ、主記憶装置、補助記憶装置などを含む。補助記憶装置には、データ処理プログラム等が記憶されている。データ処理部4300の機能は、データ処理プログラム等のソフトウェアと、プロセッサ等のハードウェアとの協働によって実現される。
データ処理部4300は、データ処理部8、データ処理部8A(画像選択部81、3次元画像構築部82)、データ処理部8B(アーティファクト除去部83、3次元画像構築部84)、データ処理部8C(3次元画像構築部85)、データ処理部8D(3次元画像構築部86、画像位置決定部87)、3次元画像構築部88(画像領域抽出部89、画像合成部90)、データ処理部8E(3次元画像構築部91、レンダリング部92)、データ処理部8F(歪み補正部93)、及び、データ処理部8G(計測部94)のうちのいずれか1つ以上を含んでいてよい。
The
サーバ4000は、データ処理部4300により得られたデータを他の装置に提供することができる。例えば、データ処理部4300が、眼科撮影装置2000-itにより取得された複数の前眼部画像から3次元画像を構築した場合、サーバ4000は、通信部4200により、この3次元画像を遠隔端末5000mに送信することができる。データ処理部4300が、眼科撮影装置2000-it又はデータ処理部4300により構築された3次元画像をレンダリングした場合、サーバ4000は、通信部4200により、構築されたレンダリング画像を遠隔端末5000mに送信することができる。データ処理部4300が、1以上の前眼部画像又は3次元画像に計測処理を適用した場合、サーバ4000は、通信部4200により、得られた計測データを遠隔端末5000mに送信することができる。データ処理部4300が、1以上の前眼部画像又は3次元画像に歪み補正を適用した場合、サーバ4000は、通信部4200により、補正された画像を遠隔端末5000mに送信することができる。
The
続いて、遠隔端末5000mについて説明する。図32に例示された遠隔端末5000mは、制御部5010と、データ処理部5100と、通信部5200と、操作部5300とを備える。
Next, the
制御部5010は、遠隔端末5000mの各部の制御を実行する。制御部5010は、その他の演算処理を実行可能であってよい。制御部5010は、プロセッサ、RAM、ROM、ハードディスクドライブ、ソリッドステートドライブなどを含む。
The
制御部5010は表示制御部5011を含む。表示制御部5011は、表示装置6000mを制御する。表示装置6000mは、遠隔端末5000mに含まれてもよいし、遠隔端末5000mに接続された周辺機器であってもよい。表示制御部5011は、被検眼Eの前眼部の画像を表示装置6000mに表示させる。前眼部の画像の例として、スリット撮影画像、シャインプルーフ撮影画像、3次元画像のレンダリング画像、正面画像、他のモダリティの画像(OCT画像等)、計測結果を表す画像、解析結果を表す画像などがある。
The
制御部5010はレポート作成制御部5012を含む。レポート作成制御部5012は、表示制御部5011により表示された情報に関するレポートを作成するための各種の制御を実行する。例えば、レポート作成制御部5012は、レポートを作成するための画面やグラフィカルユーザーインターフェイス(GUI)を表示装置6000mに表示させる。また、レポート作成制御部5012は、ユーザーが入力した情報や、前眼部の画像や、計測データや、解析データなどを、所定のレポートテンプレートに入力する。
The
〈データ処理部5100〉
データ処理部5100は、各種のデータ処理を実行する。データ処理部5100は、眼科撮影装置2000-it(特に、スリットランプ顕微鏡)により取得された複数の前眼部画像又は3次元画像を処理することができる。また、データ処理部5100は、サーバ4000等の他の情報処理装置により構築された3次元画像又はレンダリング画像を処理することができる。データ処理部5100は、プロセッサ、主記憶装置、補助記憶装置などを含む。補助記憶装置には、データ処理プログラム等が記憶されている。データ処理部5100の機能は、データ処理プログラム等のソフトウェアと、プロセッサ等のハードウェアとの協働によって実現される。
<
The
データ処理部5100は、データ処理部8、データ処理部8A(画像選択部81、3次元画像構築部82)、データ処理部8B(アーティファクト除去部83、3次元画像構築部84)、データ処理部8C(3次元画像構築部85)、データ処理部8D(3次元画像構築部86、画像位置決定部87)、3次元画像構築部88(画像領域抽出部89、画像合成部90)、データ処理部8E(3次元画像構築部91、レンダリング部92)、データ処理部8F(歪み補正部93)、及び、データ処理部8G(計測部94)のうちのいずれか1つ以上を含んでいてよい。
The
通信部5200は、他の装置(例えば、眼科撮影装置2000-it、端末3000-t、及びサーバ4000のいずれか)との間でデータ通信を行う。データ通信の方式や暗号化については、眼科撮影装置2000-itの通信部と同様であってよい。
The
操作部5300は、遠隔端末5000mの操作、遠隔端末5000mへの情報入力などに使用される。本実施形態では、操作部5300はレポートの作成に使用される。操作部5300は、操作デバイスや入力デバイスを含む。操作部5300は、例えば、マウス、キーボード、トラックボール、操作パネル、スイッチ、ボタン、ダイアルなどを含む。操作部5300は、タッチスクリーンを含んでもよい。
The
本実施形態により奏される効果を説明する。 The effects achieved by this embodiment will be explained.
眼科システム1000は、1以上のスリットランプ顕微鏡(眼科撮影装置2000-it)と1以上の情報処理装置(サーバ4000及び/又は遠隔端末5000m)とを含む。情報処理装置は、通信回線を介してスリットランプ顕微鏡に接続されており、スリットランプ顕微鏡により取得された被検眼の前眼部の画像を処理する。
The
スリットランプ顕微鏡(眼科撮影装置2000-it)は、照明系と、撮影系と、移動機構とを含む。照明系は、被検眼の前眼部にスリット光を照射する。撮影系は、スリット光が照射されている前眼部からの光を導く光学系と、光学系により導かれた光を撮像面で受光する撮像素子とを含む。移動機構は、照明系及び撮影系を移動する移動機構とを含む。照明系の光軸に沿う物面と光学系と撮像面とは、シャインプルーフの条件を満足する。撮影系は、移動機構による照明系及び撮影系の移動と並行して繰り返し撮影を行うことにより前眼部の複数の画像を取得する。 The slit lamp microscope (ophthalmologic imaging device 2000-i t ) includes an illumination system, an imaging system, and a moving mechanism. The illumination system irradiates the anterior segment of the subject's eye with slit light. The imaging system includes an optical system that guides light from the anterior segment of the eye that is irradiated with the slit light, and an image sensor that receives the light guided by the optical system on an imaging surface. The moving mechanism includes a moving mechanism that moves the illumination system and the imaging system. The object surface, optical system, and imaging surface along the optical axis of the illumination system satisfy the Scheimpflug condition. The imaging system acquires a plurality of images of the anterior segment of the eye by repeatedly performing imaging in parallel with the movement of the illumination system and imaging system by the moving mechanism.
スリットランプ顕微鏡(眼科撮影装置2000-it)の照明系及び撮影系は、少なくとも角膜前面及び水晶体後面により画成される部位に撮影系のピントが合うように構成されていてもよい。 The illumination system and imaging system of the slit lamp microscope (ophthalmology imaging device 2000-i t ) may be configured so that the imaging system focuses on a region defined by at least the anterior surface of the cornea and the posterior surface of the crystalline lens.
照明系は、被検者の体軸方向を長手方向とするスリット光を前眼部に照射するように構成されていてよい。この場合、移動機構は、体軸方向に直交する方向に照明系及び撮影系を移動するように構成されていてよい。 The illumination system may be configured to irradiate the anterior segment of the eye with slit light whose longitudinal direction is along the body axis of the subject. In this case, the moving mechanism may be configured to move the illumination system and the imaging system in a direction perpendicular to the body axis direction.
スリット光の長さは、体軸方向における角膜径以上に設定されていてよい。加えて、移動機構による照明系及び撮影系の移動距離は、体軸方向に直交する方向における角膜径以上に設定されていてよい。 The length of the slit light may be set to be longer than the corneal diameter in the body axis direction. In addition, the movement distance of the illumination system and the imaging system by the movement mechanism may be set to be greater than or equal to the corneal diameter in the direction perpendicular to the body axis direction.
このような構成を有する本実施形態によれば、少なくとも、第1実施形態と同様の効果が奏される。また、第1実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。 According to this embodiment having such a configuration, at least the same effects as in the first embodiment can be achieved. Moreover, any matters such as the configuration, elements, functions, actions, and effects described in the first embodiment can be applied to the present embodiment.
本実施形態において、スリットランプ顕微鏡(眼科撮影装置2000-it)の撮影系は、第1撮影系と第2撮影系とを含んでいてよい。第1撮影系は、スリット光が照射されている前眼部からの光を導く第1光学系と、第1光学系により導かれた光を第1撮像面で受光する第1撮像素子とを含む。更に、第1撮影系は、照明系及び撮影系の移動と並行して繰り返し撮影を行うことにより第1画像群を取得する。第2撮影系は、スリット光が照射されている前眼部からの光を導く第2光学系と、第2光学系により導かれた光を第2撮像面で受光する第2撮像素子とを含む。更に、第2撮影系は、照明系及び撮影系の移動と並行して繰り返し撮影を行うことにより第2画像群を取得する。また、第1光学系の光軸と第2光学系の光軸とは、互いに異なる向きに配置されている。加えて、物面と第1光学系と第1撮像面とがシャインプルーフの条件を満足し、且つ、物面と第2光学系と第2撮像面とがシャインプルーフの条件を満足する。 In this embodiment, the imaging system of the slit lamp microscope (ophthalmology imaging device 2000- it ) may include a first imaging system and a second imaging system. The first imaging system includes a first optical system that guides light from the anterior segment of the eye that is irradiated with the slit light, and a first image sensor that receives the light guided by the first optical system on a first imaging surface. include. Furthermore, the first imaging system acquires the first image group by repeatedly performing imaging in parallel with the movement of the illumination system and the imaging system. The second imaging system includes a second optical system that guides light from the anterior segment of the eye that is irradiated with the slit light, and a second image sensor that receives the light guided by the second optical system on a second imaging surface. include. Further, the second imaging system acquires a second image group by repeatedly performing imaging in parallel with the movement of the illumination system and the imaging system. Furthermore, the optical axis of the first optical system and the optical axis of the second optical system are arranged in different directions. In addition, the object surface, the first optical system, and the first imaging surface satisfy the Scheimpflug condition, and the object surface, the second optical system, and the second imaging surface satisfy the Scheimpflug condition.
撮影系に含まれる光学系は、反射器と、1以上のレンズとを含んでいてよい。反射器は、スリット光が照射されている前眼部からの光であって、照明系の光軸から離れる方向に進行する光を、照明系の光軸に近づく方向に反射するように構成及び配置される。1以上のレンズは、反射器により反射された光を撮像面に結像させるように構成及び配置される。 The optical system included in the imaging system may include a reflector and one or more lenses. The reflector is configured and configured to reflect light from the anterior segment of the eye irradiated with the slit light, which travels in a direction away from the optical axis of the illumination system, in a direction approaching the optical axis of the illumination system. Placed. The one or more lenses are constructed and arranged to image the light reflected by the reflector onto the imaging surface.
このような構成を有する本実施形態によれば、少なくとも、第2実施形態と同様の効果が奏される。また、第2実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。 According to this embodiment having such a configuration, at least the same effects as in the second embodiment can be achieved. Moreover, any matters such as the configuration, elements, functions, actions, and effects described in the second embodiment can be applied to the present embodiment.
本実施形態において、第1光学系の光軸と第2光学系の光軸とは、照明系の光軸に対して互いに反対の方向に傾斜して配置されていてよい。更に、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、第1撮影系及び第2撮影系により実質的に同時に取得された2つの画像のいずれかにアーティファクトが含まれるか判定し、これら2つの画像のうちの一方の画像にアーティファクトが含まれると判定されたときに他方の画像を選択する画像選択部を含んでいてよい。
In this embodiment, the optical axis of the first optical system and the optical axis of the second optical system may be inclined in opposite directions with respect to the optical axis of the illumination system. Further, the information processing device (
また、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、画像選択部により第1画像群及び第2画像群から選択された画像を含む画像群に基づいて3次元画像を構築する3次元画像構築部を含んでいてよい。
The information processing device (
このような構成を有する本実施形態によれば、少なくとも、第3実施形態と同様の効果が奏される。また、第3実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。 According to this embodiment having such a configuration, at least the same effects as in the third embodiment can be achieved. Moreover, any matters such as the configuration, elements, functions, actions, and effects described in the third embodiment can be applied to this embodiment.
本実施形態において、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、第1撮影系及び第2撮影系により実質的に同時に取得された2つの画像を比較することによりこれら2つの画像のいずれかにアーティファクトが含まれるか判定し、これら2つの画像のいずれかにアーティファクトが含まれると判定されたときに当該アーティファクトを除去するアーティファクト除去部を含んでいてよい。
In this embodiment, the information processing device (
また、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、アーティファクト除去部によりアーティファクトが除去された画像を含む画像群に基づいて3次元画像を構築する3次元画像構築部を含んでいてよい。
Further, the information processing device (
このような構成を有する本実施形態によれば、少なくとも、第4実施形態と同様の効果が奏される。また、第4実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。 According to this embodiment having such a configuration, at least the same effects as the fourth embodiment can be achieved. Moreover, any matters such as the configuration, elements, functions, actions, and effects described in the fourth embodiment can be applied to this embodiment.
本実施形態において、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、スリットランプ顕微鏡(眼科撮影装置2000-it)により取得された複数の画像に基づいて3次元画像を構築する3次元画像構築部を含んでいてよい。
In this embodiment, the information processing device (
このような構成を有する本実施形態によれば、少なくとも、第5実施形態と同様の効果が奏される。また、第5実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。 According to this embodiment having such a configuration, at least the same effects as in the fifth embodiment can be achieved. Furthermore, any of the configurations, elements, functions, actions, effects, etc. described in the fifth embodiment can be applied to this embodiment.
本実施形態において、移動機構は、照明系の光軸を回転軸として照明系及び撮影系を一体的に回転する回転機構を含んでいてよい。更に、照明系及び撮影系が第1回転位置に配置されているときに撮影系は複数の画像を取得し、且つ、第1回転位置と異なる第2回転位置に照明系及び撮影系が配置されているときに撮影系は照明系によりスリット光が照射されている前眼部の画像を取得することができる。加えて、3次元画像構築部は、第2回転位置において取得された画像に基づいて複数の画像の相対位置を決定する画像位置決定部を含んでいてよい。 In this embodiment, the moving mechanism may include a rotation mechanism that rotates the illumination system and the imaging system integrally with the optical axis of the illumination system as the rotation axis. Furthermore, the imaging system acquires a plurality of images when the illumination system and the imaging system are arranged at the first rotational position, and the lighting system and the imaging system are arranged at a second rotational position different from the first rotational position. The imaging system can acquire an image of the anterior segment of the eye illuminated with slit light by the illumination system. In addition, the three-dimensional image construction unit may include an image position determination unit that determines relative positions of the plurality of images based on images acquired at the second rotational position.
このような構成を有する本実施形態によれば、少なくとも、第6実施形態と同様の効果が奏される。また、第6実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。 According to this embodiment having such a configuration, at least the same effects as in the sixth embodiment can be achieved. Moreover, any matters such as the configuration, elements, functions, actions, and effects described in the sixth embodiment can be applied to this embodiment.
本実施形態において、3次元画像構築部は、スリットランプ顕微鏡(眼科撮影装置2000-it)により取得された複数の画像のそれぞれから、スリット光の照射領域に対応する画像領域を抽出する画像領域抽出部と、画像領域抽出部により複数の画像からそれぞれ抽出された複数の画像領域を合成して3次元画像を構築する画像合成部とを含んでいてよい。 In the present embodiment, the three-dimensional image construction unit extracts an image region corresponding to the slit light irradiation region from each of a plurality of images acquired by a slit lamp microscope (ophthalmology imaging device 2000- it ). The image forming apparatus may include an extracting section and an image synthesizing section that synthesizes a plurality of image regions respectively extracted from a plurality of images by the image region extracting section to construct a three-dimensional image.
画像領域抽出部は、スリットランプ顕微鏡(眼科撮影装置2000-it)により取得された複数の画像のそれぞれから、スリット光の照射領域及び前眼部の所定部位の双方に対応する画像領域を抽出するように構成されていてよい。 The image region extraction unit extracts an image region corresponding to both the slit light irradiation region and a predetermined region of the anterior segment from each of the plurality of images acquired by the slit lamp microscope (ophthalmology imaging device 2000- it ). It may be configured to do so.
所定部位は、角膜前面及び水晶体後面により画成される部位であってよい。 The predetermined region may be a region defined by the anterior surface of the cornea and the posterior surface of the crystalline lens.
このような構成を有する本実施形態によれば、少なくとも、第7実施形態と同様の効果が奏される。また、第7実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。 According to this embodiment having such a configuration, at least the same effects as in the seventh embodiment can be achieved. Moreover, any matters such as the configuration, elements, functions, actions, and effects described in the seventh embodiment can be applied to this embodiment.
本実施形態において、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、3次元画像をレンダリングしてレンダリング画像を構築するレンダリング部を含んでいてよい。
In this embodiment, the information processing device (
3次元画像に対して断面が指定されたとき、レンダリング部は、3次元画像を当該断面で切断して3次元部分画像を構築することができる。 When a cross-section is specified for a three-dimensional image, the rendering unit can construct a three-dimensional partial image by cutting the three-dimensional image at the cross-section.
3次元画像に対して断面が指定されたとき、レンダリング部は、当該断面を表す2次元断面画像を構築することができる。 When a cross section is specified for a three-dimensional image, the rendering unit can construct a two-dimensional cross-sectional image representing the cross section.
3次元画像に対してスライスが指定されたとき、レンダリング部は、当該スライスに対応する3次元スライス画像を構築することができる。 When a slice is specified for a three-dimensional image, the rendering unit can construct a three-dimensional slice image corresponding to the slice.
このような構成を有する本実施形態によれば、少なくとも、第8実施形態と同様の効果が奏される。また、第8実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。 According to this embodiment having such a configuration, at least the same effects as in the eighth embodiment can be achieved. Moreover, any matters such as the configuration, elements, functions, actions, and effects described in the eighth embodiment can be applied to this embodiment.
本実施形態において、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、照明系の光軸と撮影系の光軸とがなす角度である光軸角度に起因する歪みを補正するための処理を、スリットランプ顕微鏡(眼科撮影装置2000-it)により取得された複数の画像のうちの少なくとも1つに適用する歪み補正部を含んでいてよい。
In this embodiment, the information processing device (
撮影系に含まれる光学系の光軸は、照明系の光軸に対して、照明系の光軸に沿う第1方向及びスリット光の長手方向に沿う第2方向の双方に直交する第3方向に傾斜して配置されていてよい。この場合、歪み補正部は、第1方向及び第2方向の双方を含む平面における歪みを補正するための処理を実行することができる。 The optical axis of the optical system included in the imaging system is in a third direction perpendicular to both the first direction along the optical axis of the illumination system and the second direction along the longitudinal direction of the slit light, with respect to the optical axis of the illumination system. It may be arranged at an angle. In this case, the distortion correction unit can perform processing for correcting distortion in a plane including both the first direction and the second direction.
歪み補正部は、所定の基準角度と光軸角度とに基づき設定された補正係数を予め記憶しており、当該補正係数に基づいて歪みを補正するための処理を実行するように構成されていてよい。 The distortion correction unit stores in advance a correction coefficient set based on a predetermined reference angle and an optical axis angle, and is configured to execute processing for correcting distortion based on the correction coefficient. good.
このような構成を有する本実施形態によれば、少なくとも、第9実施形態と同様の効果が奏される。また、第9実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。 According to this embodiment having such a configuration, at least the same effects as the ninth embodiment can be achieved. Furthermore, any of the configurations, elements, functions, actions, effects, etc. described in the ninth embodiment can be applied to this embodiment.
本実施形態において、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、スリットランプ顕微鏡(眼科撮影装置2000-it)により取得された複数の画像のうちの少なくとも1つを解析することにより所定の計測値を求める第1計測部を含んでいてよい。
In this embodiment, the information processing device (
また、本実施形態において、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、3次元画像構築部により構築された3次元画像を解析することにより所定の計測値を求める第2計測部を含んでいてよい。
In this embodiment, the information processing device (
このような構成を有する本実施形態によれば、少なくとも、第10実施形態と同様の効果が奏される。また、第10実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。 According to this embodiment having such a configuration, at least the same effects as in the tenth embodiment can be achieved. Furthermore, any of the configurations, elements, functions, actions, effects, etc. described in the tenth embodiment can be applied to this embodiment.
本実施形態において、スリットランプ顕微鏡(眼科撮影装置2000-it)は、撮影系による複数の画像の取得と並行して前眼部を固定位置から動画撮影する動画撮影系を含んでいてよい。 In this embodiment, the slit lamp microscope (ophthalmological imaging device 2000-i t ) may include a video imaging system that photographs a video of the anterior segment of the eye from a fixed position in parallel with the acquisition of a plurality of images by the imaging system.
更に、スリットランプ顕微鏡(眼科撮影装置2000-it)は、動画撮影系により取得される動画像を解析して被検眼の運動を検出する運動検出部を含んでいてよい。 Furthermore, the slit lamp microscope (ophthalmology imaging device 2000-i t ) may include a motion detection unit that analyzes a moving image acquired by a moving image capturing system to detect the movement of the subject's eye.
加えて、スリットランプ顕微鏡(眼科撮影装置2000-it)は、運動検出部からの出力に基づいて移動機構を制御する移動制御部を含んでいてよい。 In addition, the slit lamp microscope (ophthalmologic imaging device 2000-i t ) may include a movement control unit that controls the movement mechanism based on the output from the movement detection unit.
このような構成を有する本実施形態によれば、少なくとも、第11実施形態と同様の効果が奏される。また、第11実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。 According to this embodiment having such a configuration, at least the same effects as in the eleventh embodiment can be achieved. Moreover, any matters such as the configuration, elements, functions, actions, and effects described in the eleventh embodiment can be applied to this embodiment.
〈その他の事項〉
以上に説明した実施形態は本発明の典型的な例示に過ぎない。よって、本発明の要旨の範囲内における任意の変形(省略、置換、付加等)を適宜に施すことが可能である。
<Other matters>
The embodiments described above are merely typical illustrations of the present invention. Therefore, any modification (omission, substitution, addition, etc.) can be made as appropriate within the scope of the gist of the present invention.
第1~第12実施形態のいずれか1つ又はいずれか2以上の組み合わせに係る処理をコンピュータに実行させるプログラムを構成することが可能である。また、第1~第12実施形態のいずれか1つ又はいずれか2以上の組み合わせに対して本発明の要旨の範囲内における任意の変形を適用することによって実現される処理をコンピュータに実行させるプログラムを構成することが可能である。 It is possible to configure a program that causes a computer to execute processing related to any one of the first to twelfth embodiments or a combination of any two or more. Further, a program that causes a computer to execute a process realized by applying any modification within the scope of the gist of the present invention to any one or a combination of any two or more of the first to twelfth embodiments. It is possible to configure
更に、このようなプログラムを記録したコンピュータ可読な非一時的記録媒体を作成することが可能である。この非一時的記録媒体は任意の形態であってよく、その例として、磁気ディスク、光ディスク、光磁気ディスク、半導体メモリなどがある。 Furthermore, it is possible to create a computer-readable non-transitory recording medium recording such a program. This non-transitory recording medium may be in any form, examples of which include magnetic disks, optical disks, magneto-optical disks, and semiconductor memory.
本発明は、第1~第12実施形態のいずれか1つ又はいずれか2以上の組み合わせにより実現される方法を含む。また、第1~第12実施形態のいずれか1つ又はいずれか2以上の組み合わせに対して本発明の要旨の範囲内における任意の変形を適用することによって実現される方法も、本発明に含まれる。 The present invention includes a method realized by any one of the first to twelfth embodiments or a combination of any two or more. The present invention also includes a method realized by applying any modification within the scope of the gist of the present invention to any one or a combination of any two or more of the first to twelfth embodiments. It will be done.
1 スリットランプ顕微鏡
2 照明系
3 撮影系
4 光学系
5 撮像素子
6 移動機構
7 制御系
8 データ処理部
9 通信部
1
Claims (3)
前記スリット光が照射されている前記前眼部からの光を導く光学系と、前記光学系により導かれた前記光を撮像面で受光する撮像素子とを含む撮影系と、
前記前眼部を正面から動画撮影することによって、前記前眼部の所定部位が描出されたフレームを逐次に取得する動画撮影系と、
前記動画撮影系を移動することなく前記照明系及び前記撮影系を移動する移動機構と、
制御部と
を含み、
前記照明系の光軸に沿う物面と前記光学系と前記撮像面とがシャインプルーフの条件を満足し、
前記動画撮影系による前記正面且つ固定位置からの前記前眼部の動画撮影と並行して、前記制御部は、前記照明系及び前記撮影系を移動するための前記移動機構の制御と前記前眼部を繰り返し撮影して複数の画像を取得するための前記撮影系の制御とを並行して実行する
ことを特徴とするスリットランプ顕微鏡。 an illumination system that irradiates the anterior segment of the eye to be examined with slit light;
an imaging system that includes an optical system that guides light from the anterior eye segment that is irradiated with the slit light; and an imaging device that receives the light guided by the optical system on an imaging surface;
a video imaging system that sequentially obtains frames in which predetermined parts of the anterior eye segment are depicted by photographing the anterior eye segment from the front;
a moving mechanism that moves the illumination system and the imaging system without moving the video imaging system;
including a control unit and
the object surface along the optical axis of the illumination system, the optical system, and the imaging surface satisfy Scheimpflug conditions;
In parallel with the video capturing of the anterior eye segment from the front and fixed position by the video capturing system, the control unit controls the moving mechanism for moving the illumination system and the imaging system, and controls the moving mechanism for moving the illumination system and the imaging system. A slit lamp microscope characterized in that control of the photographing system for repeatedly photographing a part of the body and acquiring a plurality of images is executed in parallel.
ことを特徴とする請求項1に記載のスリットランプ顕微鏡。 In parallel with the control of the moving mechanism and the control of the imaging system, frames sequentially acquired by the video imaging system are analyzed to identify feature points corresponding to the predetermined region, and The slit lamp microscope according to claim 1, further comprising a movement detection unit that detects movement of the eye to be examined based on a change in the position of a feature point over time.
ことを特徴とする請求項2に記載のスリットランプ顕微鏡。
The slit lamp microscope according to claim 2, wherein the control unit executes the control of the moving mechanism based on an output from the movement detection unit.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024002303A JP2024028448A (en) | 2018-06-13 | 2024-01-11 | slit lamp microscope |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018112936A JP7228342B2 (en) | 2018-06-13 | 2018-06-13 | slit lamp microscope and ophthalmic system |
| JP2022164555A JP7466607B2 (en) | 2018-06-13 | 2022-10-13 | Slit Lamp Microscope |
| JP2024002303A JP2024028448A (en) | 2018-06-13 | 2024-01-11 | slit lamp microscope |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022164555A Division JP7466607B2 (en) | 2018-06-13 | 2022-10-13 | Slit Lamp Microscope |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2024028448A true JP2024028448A (en) | 2024-03-04 |
Family
ID=68842005
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018112936A Active JP7228342B2 (en) | 2018-06-13 | 2018-06-13 | slit lamp microscope and ophthalmic system |
| JP2022164555A Active JP7466607B2 (en) | 2018-06-13 | 2022-10-13 | Slit Lamp Microscope |
| JP2024002303A Pending JP2024028448A (en) | 2018-06-13 | 2024-01-11 | slit lamp microscope |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018112936A Active JP7228342B2 (en) | 2018-06-13 | 2018-06-13 | slit lamp microscope and ophthalmic system |
| JP2022164555A Active JP7466607B2 (en) | 2018-06-13 | 2022-10-13 | Slit Lamp Microscope |
Country Status (2)
| Country | Link |
|---|---|
| JP (3) | JP7228342B2 (en) |
| WO (1) | WO2019240151A1 (en) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7481705B2 (en) | 2020-04-30 | 2024-05-13 | 国立研究開発法人理化学研究所 | Healthcare System |
| JP2021176056A (en) | 2020-05-01 | 2021-11-04 | 国立研究開発法人理化学研究所 | Medical system and medical information processing device |
| JP7543002B2 (en) | 2020-06-17 | 2024-09-02 | 株式会社トプコン | Slit lamp microscope |
| JP2022028197A (en) * | 2020-08-03 | 2022-02-16 | 株式会社トプコン | Slit lamp microscope |
| JP2022054784A (en) | 2020-09-28 | 2022-04-07 | 株式会社トプコン | Medical system and medical information processing device |
| WO2023181779A1 (en) * | 2022-03-22 | 2023-09-28 | ソニーグループ株式会社 | Inspection system |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2003057023A1 (en) * | 2002-01-10 | 2003-07-17 | Carl Zeiss Meditec Ag | Arrangement and method for illuminating the lens of the human eye |
| JP3878164B2 (en) * | 2003-04-16 | 2007-02-07 | 賢治 柏木 | Ophthalmic examination equipment |
| JP5083758B2 (en) * | 2007-05-21 | 2012-11-28 | 国立大学法人山梨大学 | Ophthalmic remote diagnosis system |
| US20090096987A1 (en) * | 2007-10-10 | 2009-04-16 | Ming Lai | Eye Measurement Apparatus and a Method of Using Same |
| EP2242418B1 (en) * | 2007-12-21 | 2011-08-03 | SIFI MEDTECH S.r.l. | Dual scheimpflug system for three- dimensional analysis of an eye |
| JP5578560B2 (en) * | 2010-09-03 | 2014-08-27 | 株式会社ニデック | Anterior segment measurement device |
| JP2017185367A (en) * | 2017-07-20 | 2017-10-12 | 株式会社トプコン | Slit lamp microscope |
-
2018
- 2018-06-13 JP JP2018112936A patent/JP7228342B2/en active Active
-
2019
- 2019-06-12 WO PCT/JP2019/023204 patent/WO2019240151A1/en active Application Filing
-
2022
- 2022-10-13 JP JP2022164555A patent/JP7466607B2/en active Active
-
2024
- 2024-01-11 JP JP2024002303A patent/JP2024028448A/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| JP7466607B2 (en) | 2024-04-12 |
| JP2022179731A (en) | 2022-12-02 |
| JP2019213734A (en) | 2019-12-19 |
| JP7228342B2 (en) | 2023-02-24 |
| WO2019240151A1 (en) | 2019-12-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7466607B2 (en) | Slit Lamp Microscope | |
| JP7154044B2 (en) | slit lamp microscope and ophthalmic system | |
| JP7321678B2 (en) | slit lamp microscope and ophthalmic system | |
| WO2021049341A1 (en) | Slit lamp microscope, ophthalmic information processing device, ophthalmic system, method for controlling slit lamp microscope, program, and recording medium | |
| WO2021256130A1 (en) | Slit lamp microscope | |
| JP7133950B2 (en) | Ophthalmic system, ophthalmic information processing device, program, and recording medium | |
| JP2024152821A (en) | Slit Lamp Microscope | |
| JP7560303B2 (en) | Slit Lamp Microscope System | |
| JP7345610B2 (en) | slit lamp microscope | |
| JP7517903B2 (en) | Slit Lamp Microscope System | |
| JP7237219B2 (en) | Ophthalmic system, ophthalmic information processing device, program, and recording medium | |
| JP7560300B2 (en) | Slit Lamp Microscope System | |
| WO2023037658A1 (en) | Ophthalmological device, method for controlling ophthalmological device, method for processing eye image, program, and recording medium | |
| JP2024159832A (en) | Slit Lamp Microscope | |
| CN116034306A (en) | Slit lamp microscope | |
| JP2020157041A (en) | Slit lamp microscope |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240116 |