JP2024028448A - スリットランプ顕微鏡 - Google Patents
スリットランプ顕微鏡 Download PDFInfo
- Publication number
- JP2024028448A JP2024028448A JP2024002303A JP2024002303A JP2024028448A JP 2024028448 A JP2024028448 A JP 2024028448A JP 2024002303 A JP2024002303 A JP 2024002303A JP 2024002303 A JP2024002303 A JP 2024002303A JP 2024028448 A JP2024028448 A JP 2024028448A
- Authority
- JP
- Japan
- Prior art keywords
- image
- imaging
- imaging system
- images
- slit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000003384 imaging method Methods 0.000 claims abstract description 522
- 238000005286 illumination Methods 0.000 claims abstract description 269
- 230000003287 optical effect Effects 0.000 claims abstract description 267
- 230000033001 locomotion Effects 0.000 claims abstract description 91
- 230000007246 mechanism Effects 0.000 claims abstract description 91
- 210000002294 anterior eye segment Anatomy 0.000 claims description 34
- 238000001514 detection method Methods 0.000 claims description 21
- 230000008859 change Effects 0.000 claims description 3
- 238000012545 processing Methods 0.000 description 157
- 238000004891 communication Methods 0.000 description 99
- 210000000695 crystalline len Anatomy 0.000 description 90
- 238000012937 correction Methods 0.000 description 78
- 238000010276 construction Methods 0.000 description 68
- 238000009877 rendering Methods 0.000 description 65
- 238000000034 method Methods 0.000 description 53
- 210000004087 cornea Anatomy 0.000 description 45
- 238000005259 measurement Methods 0.000 description 44
- 230000006870 function Effects 0.000 description 40
- 230000010365 information processing Effects 0.000 description 38
- 230000000694 effects Effects 0.000 description 35
- 238000010586 diagram Methods 0.000 description 34
- 230000008569 process Effects 0.000 description 25
- 238000000605 extraction Methods 0.000 description 20
- 239000000284 extract Substances 0.000 description 16
- 238000003745 diagnosis Methods 0.000 description 14
- 238000012546 transfer Methods 0.000 description 13
- 230000009471 action Effects 0.000 description 11
- 201000010099 disease Diseases 0.000 description 10
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 10
- 210000001747 pupil Anatomy 0.000 description 9
- 230000015572 biosynthetic process Effects 0.000 description 8
- 238000005516 engineering process Methods 0.000 description 7
- 238000000386 microscopy Methods 0.000 description 7
- 238000003786 synthesis reaction Methods 0.000 description 7
- 230000005540 biological transmission Effects 0.000 description 6
- 238000010191 image analysis Methods 0.000 description 6
- 230000011218 segmentation Effects 0.000 description 6
- 238000012014 optical coherence tomography Methods 0.000 description 5
- 210000001519 tissue Anatomy 0.000 description 5
- 238000004458 analytical method Methods 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000013473 artificial intelligence Methods 0.000 description 3
- 210000001061 forehead Anatomy 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 238000007689 inspection Methods 0.000 description 3
- 238000012216 screening Methods 0.000 description 3
- 230000002123 temporal effect Effects 0.000 description 3
- 206010047571 Visual impairment Diseases 0.000 description 2
- 238000007792 addition Methods 0.000 description 2
- 230000002411 adverse Effects 0.000 description 2
- 210000002159 anterior chamber Anatomy 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 230000001149 cognitive effect Effects 0.000 description 2
- 210000000399 corneal endothelial cell Anatomy 0.000 description 2
- 238000003708 edge detection Methods 0.000 description 2
- 230000004410 intraocular pressure Effects 0.000 description 2
- 230000001678 irradiating effect Effects 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 238000006467 substitution reaction Methods 0.000 description 2
- 230000004304 visual acuity Effects 0.000 description 2
- 241000699666 Mus <mouse, genus> Species 0.000 description 1
- 241000699670 Mus sp. Species 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 238000009530 blood pressure measurement Methods 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 208000030533 eye disease Diseases 0.000 description 1
- 230000004438 eyesight Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 210000004175 meibomian gland Anatomy 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000003909 pattern recognition Methods 0.000 description 1
- 230000000649 photocoagulation Effects 0.000 description 1
- 238000002428 photodynamic therapy Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000007639 printing Methods 0.000 description 1
- 230000002250 progressing effect Effects 0.000 description 1
- 238000012797 qualification Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000012827 research and development Methods 0.000 description 1
- 230000002207 retinal effect Effects 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 230000002194 synthesizing effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images





























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/13—Ophthalmic microscopes
- A61B3/135—Slit-lamp microscopes
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Biophysics (AREA)
- Ophthalmology & Optometry (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Eye Examination Apparatus (AREA)
Abstract
【課題】高品質なスリットランプ顕微鏡検査を広く提供する。【解決手段】実施形態のスリットランプ顕微鏡の照明系は、被検眼の前眼部にスリット光を照射する。撮影系は、スリット光が照射されている前眼部からの光を導く光学系と、光学系により導かれた光を撮像面で受光する撮像素子とを含む。照明系の光軸に沿う物面と光学系と撮像面とはシャインプルーフの条件を満足する。動画撮影系は、前眼部を正面から動画撮影することによって、前眼部の所定部位が描出されたフレームを逐次に取得する。移動機構は、動画撮影系を移動することなく照明系及び撮影系を移動する。動画撮影系による正面且つ固定位置からの前眼部の動画撮影と並行して、制御部は、照明系及び撮影系を移動するための移動機構の制御と前眼部を繰り返し撮影して複数の画像を取得するための撮影系の制御とを並行して実行する。【選択図】図5
Description
本発明は、スリットランプ顕微鏡に関する。
眼科分野において画像診断は重要な位置を占める。画像診断では、各種の眼科撮影装置が用いられる。眼科撮影装置には、スリットランプ顕微鏡、眼底カメラ、走査型レーザー検眼鏡(SLO)、光干渉断層計(OCT)などがある。また、レフラクトメータ、ケラトメータ、眼圧計、スペキュラーマイクロスコープ、ウェーブフロントアナライザ、マイクロペリメータなどの各種の検査装置や測定装置にも、前眼部や眼底を撮影する機能が搭載されている。
これら様々な眼科装置のうち最も広く且つ頻繁に使用される装置の一つがスリットランプ顕微鏡である。スリットランプ顕微鏡は、スリット光で被検眼を照明し、照明された断面を側方から顕微鏡で観察したり撮影したりするための眼科装置である(例えば、特許文献1、2を参照)。
角膜や水晶体など前眼部の観察や診断には、一般的にスリットランプ顕微鏡が用いられる。例えば、医師は、スリット光による照明野やフォーカス位置を移動させつつ診断部位全体を観察して異常の有無を判断する。また、コンタクトレンズのフィッティング状態の確認など、視力補正器具の処方において、スリットランプ顕微鏡が用いられることもある。更に、オプトメトリストのように医師以外の資格を持つ者や、眼鏡店の店員などが、眼疾患のスクリーニング等の目的でスリットランプ顕微鏡を用いることもある。
ところで、近年の情報通信技術の進歩を受けて、遠隔医療技術に関する研究開発が発展を見せている。遠隔医療とは、インターネット等の情報技術を利用して、遠隔地に居る患者に対して診療を行う行為である。特許文献3、4にはスリットランプ顕微鏡を遠隔地から操作するための技術が開示されている。
しかしながら、スリットランプを用いて良好な画像を得るには、照明角度や撮影角度の調整など、微細で煩雑な操作が必要とされる。特許文献3、4に開示された技術では、目の前に居る被検者の眼を観察する場合でも難しい操作を、遠隔地に居る検者が実施しなければならないため、検査時間が長くなったり、良好な画像が得られなかったりといった問題が生じる。
また、上記のようにスリットランプ顕微鏡はスクリーニング等の検査に有効であるが、同装置に関する専門技術の保持者が不足しており、高品質な検査を多くの人に提供することができないという現状がある。
本発明の目的は、高品質なスリットランプ顕微鏡検査を広く提供することを可能にすることにある。
例示的な実施形態の第1の態様は、被検眼の前眼部にスリット光を照射する照明系と、前記スリット光が照射されている前記前眼部からの光を導く光学系と前記光学系により導かれた前記光を撮像面で受光する撮像素子とを含む撮影系と、前記照明系及び前記撮影系を移動する移動機構とを含み、前記照明系の光軸に沿う物面と前記光学系と前記撮像面とがシャインプルーフの条件を満足し、前記撮影系は、前記移動機構による前記照明系及び前記撮影系の移動と並行して繰り返し撮影を行うことにより前記前眼部の複数の画像を取得することを特徴とするスリットランプ顕微鏡である。
例示的な実施形態の第2の態様は、第1の態様のスリットランプ顕微鏡であって、前記撮影系は、前記スリット光が照射されている前記前眼部からの光を導く第1光学系と、前記第1光学系により導かれた前記光を第1撮像面で受光する第1撮像素子とを含み、前記移動と並行して繰り返し撮影を行うことにより第1画像群を取得する第1撮影系と、前記スリット光が照射されている前記前眼部からの光を導く第2光学系と、前記第2光学系により導かれた前記光を第2撮像面で受光する第2撮像素子とを含み、前記移動と並行して繰り返し撮影を行うことにより第2画像群を取得する第2撮影系とを含み、前記第1光学系の光軸と前記第2光学系の光軸とは、互いに異なる向きに配置されており、前記物面と前記第1光学系と前記第1撮像面とがシャインプルーフの条件を満足し、且つ、前記物面と前記第2光学系と前記第2撮像面とがシャインプルーフの条件を満足することを特徴とする。
例示的な実施形態の第3の態様は、第2の態様のスリットランプ顕微鏡であって、前記第1光学系の光軸と前記第2光学系の光軸とは、前記照明系の光軸に対して互いに反対の方向に傾斜して配置されており、前記第1撮影系及び前記第2撮影系により実質的に同時に取得された2つの画像のいずれかにアーティファクトが含まれるか判定し、前記2つの画像のうちの一方の画像にアーティファクトが含まれると判定されたときに他方の画像を選択する画像選択部を更に含むことを特徴とする。
例示的な実施形態の第4の態様は、第3の態様のスリットランプ顕微鏡であって、前記画像選択部により前記第1画像群及び前記第2画像群から選択された画像を含む画像群に基づいて3次元画像を構築する3次元画像構築部を更に含むことを特徴とする。
例示的な実施形態の第5の態様は、第2の態様のスリットランプ顕微鏡であって、前記第1撮影系及び前記第2撮影系により実質的に同時に取得された2つの画像を比較することにより前記2つの画像のいずれかにアーティファクトが含まれるか判定し、前記2つの画像のいずれかにアーティファクトが含まれると判定されたときに当該アーティファクトを除去するアーティファクト除去部を更に含むことを特徴とする。
例示的な実施形態の第6の態様は、第5の態様のスリットランプ顕微鏡であって、前記アーティファクト除去部によりアーティファクトが除去された画像を含む画像群に基づいて3次元画像を構築する3次元画像構築部を更に含むことを特徴とする。
例示的な実施形態の第7の態様は、第1の態様のスリットランプ顕微鏡であって、前記撮影系により取得された前記複数の画像に基づいて3次元画像を構築する3次元画像構築部を更に含むことを特徴とする。
例示的な実施形態の第8の態様は、第4、6及び7の態様のいずれかのスリットランプ顕微鏡であって、前記移動機構は、前記照明系の光軸を回転軸として前記照明系及び前記撮影系を一体的に回転する回転機構を含み、前記照明系及び前記撮影系が第1回転位置に配置されているときに、前記撮影系は、前記複数の画像を取得し、前記第1回転位置と異なる第2回転位置に前記照明系及び前記撮影系が配置されているときに、前記撮影系は、前記照明系によりスリット光が照射されている前記前眼部の画像を取得し、前記3次元画像構築部は、前記第2回転位置において取得された前記画像に基づいて前記複数の画像の相対位置を決定する画像位置決定部を含むことを特徴とする。
例示的な実施形態の第9の態様は、第4、6~8の態様のいずれかのスリットランプ顕微鏡であって、前記3次元画像構築部は、前記複数の画像のそれぞれから、前記スリット光の照射領域に対応する画像領域を抽出する画像領域抽出部と、前記画像領域抽出部により前記複数の画像からそれぞれ抽出された複数の画像領域を合成して3次元画像を構築する画像合成部とを含むことを特徴とする。
例示的な実施形態の第10の態様は、第9の態様のスリットランプ顕微鏡であって、前記画像領域抽出部は、前記複数の画像のそれぞれから、前記スリット光の照射領域及び前記前眼部の所定部位の双方に対応する画像領域を抽出することを特徴とする。
例示的な実施形態の第11の態様は、第10の態様のスリットランプ顕微鏡であって、前記所定部位は、角膜前面及び水晶体後面により画成される部位であることを特徴とする。
例示的な実施形態の第12の態様は、第4、6~11の態様のいずれかのスリットランプ顕微鏡であって、前記3次元画像をレンダリングしてレンダリング画像を構築するレンダリング部を更に含むことを特徴とする。
例示的な実施形態の第13の態様は、第12の態様のスリットランプ顕微鏡であって、前記3次元画像に対して断面が指定されたとき、前記レンダリング部は、前記3次元画像を当該断面で切断して3次元部分画像を構築することを特徴とする。
例示的な実施形態の第14の態様は、第12の態様のスリットランプ顕微鏡であって、前記3次元画像に対して断面が指定されたとき、前記レンダリング部は、当該断面を表す2次元断面画像を構築することを特徴とする。
例示的な実施形態の第15の態様は、第12の態様のスリットランプ顕微鏡であって、前記3次元画像に対してスライスが指定されたとき、前記レンダリング部は、当該スライスに対応する3次元スライス画像を構築することを特徴とする。
例示的な実施形態の第16の態様は、第1~15の態様のいずれかのスリットランプ顕微鏡であって、前記照明系の光軸と前記撮影系の光軸とがなす角度である光軸角度に起因する歪みを補正するための処理を、前記複数の画像のうちの少なくとも1つに適用する歪み補正部を更に含むことを特徴とする。
例示的な実施形態の第17の態様は、第16の態様のスリットランプ顕微鏡であって、前記撮影系に含まれる前記光学系の光軸は、前記照明系の光軸に対して、前記照明系の光軸に沿う第1方向及び前記スリット光の長手方向に沿う第2方向の双方に直交する第3方向に傾斜して配置されており、前記歪み補正部は、前記第1方向及び前記第2方向の双方を含む平面における歪みを補正するための処理を実行することを特徴とする。
例示的な実施形態の第18の態様は、第16又は17の態様のスリットランプ顕微鏡であって、前記歪み補正部は、所定の基準角度と前記光軸角度とに基づき設定された補正係数を予め記憶しており、当該補正係数に基づいて前記歪みを補正するための処理を実行することを特徴とする。
例示的な実施形態の第19の態様は、第1~18の態様のいずれかのスリットランプ顕微鏡であって、前記撮影系により取得された前記複数の画像のうちの少なくとも1つを解析することにより所定の計測値を求める第1計測部を更に含むことを特徴とする。
例示的な実施形態の第20の態様は、第4、6~15の態様のいずれかのスリットランプ顕微鏡であって、前記3次元画像構築部により構築された前記3次元画像を解析することにより所定の計測値を求める第2計測部を更に含むことを特徴とする。
例示的な実施形態の第21の態様は、第1~20の態様のいずれかのスリットランプ顕微鏡であって、前記照明系及び前記撮影系は、少なくとも角膜前面及び水晶体後面により画成される部位に前記撮影系のピントが合うように構成されていることを特徴とする。
例示的な実施形態の第22の態様は、第1~21の態様のいずれかのスリットランプ顕微鏡であって、前記照明系は、被検者の体軸方向を長手方向とするスリット光を前記前眼部に照射し、前記移動機構は、前記体軸方向に直交する方向に前記照明系及び前記撮影系を移動することを特徴とする。
例示的な実施形態の第23の態様は、第22の態様のスリットランプ顕微鏡であって、前記スリット光の長さは、前記体軸方向における角膜径以上であり、前記移動機構による前記照明系及び前記撮影系の移動距離は、前記体軸方向に直交する方向における角膜径以上であることを特徴とする。
例示的な実施形態の第24の態様は、第1~23の態様のいずれかのスリットランプ顕微鏡であって、前記撮影系に含まれる前記光学系は、前記スリット光が照射されている前記前眼部からの光であって、前記照明系の光軸から離れる方向に進行する光を、前記照明系の光軸に近づく方向に反射する反射器と、前記反射器により反射された前記光を前記撮像面に結像させる1以上のレンズとを含むことを特徴とする。
例示的な実施形態の第25の態様は、第1~24の態様のいずれかのスリットランプ顕微鏡であって、撮影系による前記複数の画像の取得と並行して前記前眼部を固定位置から動画撮影する動画撮影系を更に含むことを特徴とする。
例示的な実施形態の第26の態様は、第25の態様のスリットランプ顕微鏡であって、前記動画撮影系により取得される動画像を解析して前記被検眼の運動を検出する運動検出部を更に含むことを特徴とする。
例示的な実施形態の第27の態様は、第26の態様のスリットランプ顕微鏡であって、前記運動検出部からの出力に基づいて前記移動機構を制御する移動制御部を更に含むことを特徴とする。
例示的な実施形態の第28の態様は、第1~27の態様のいずれかのスリットランプ顕微鏡であって、前記前眼部について取得された画像を情報処理装置に向けて送信する通信部を更に含むことを特徴とする。
例示的な実施形態の第29の態様は、スリットランプ顕微鏡と、通信回線を介して前記スリットランプ顕微鏡に接続されており、前記スリットランプ顕微鏡により取得された被検眼の前眼部の画像を処理する情報処理装置とを含む眼科システムである。前記スリットランプ顕微鏡は、被検眼の前眼部にスリット光を照射する照明系と、前記スリット光が照射されている前記前眼部からの光を導く光学系と前記光学系により導かれた前記光を撮像面で受光する撮像素子とを含む撮影系と、前記照明系及び前記撮影系を移動する移動機構とを含む。前記照明系の光軸に沿う物面と前記光学系と前記撮像面とは、シャインプルーフの条件を満足する。前記撮影系は、前記移動機構による前記照明系及び前記撮影系の移動と並行して繰り返し撮影を行うことにより前記前眼部の複数の画像を取得する。
例示的な実施形態の第30の態様は、第29の態様の眼科システムであって、前記スリットランプ顕微鏡の前記撮影系は、前記スリット光が照射されている前記前眼部からの光を導く第1光学系と、前記第1光学系により導かれた前記光を第1撮像面で受光する第1撮像素子とを含み、前記移動と並行して繰り返し撮影を行うことにより第1画像群を取得する第1撮影系と、前記スリット光が照射されている前記前眼部からの光を導く第2光学系と、前記第2光学系により導かれた前記光を第2撮像面で受光する第2撮像素子とを含み、前記移動と並行して繰り返し撮影を行うことにより第2画像群を取得する第2撮影系とを含み、前記第1光学系の光軸と前記第2光学系の光軸とは、互いに異なる向きに配置されており、前記物面と前記第1光学系と前記第1撮像面とがシャインプルーフの条件を満足し、且つ、前記物面と前記第2光学系と前記第2撮像面とがシャインプルーフの条件を満足することを特徴とする。
例示的な実施形態の第31の態様は、第30の態様の眼科システムであって、前記第1光学系の光軸と前記第2光学系の光軸とは、前記照明系の光軸に対して互いに反対の方向に傾斜して配置されており、前記情報処理装置は、前記第1撮影系及び前記第2撮影系により実質的に同時に取得された2つの画像のいずれかにアーティファクトが含まれるか判定し、前記2つの画像のうちの一方の画像にアーティファクトが含まれると判定されたときに他方の画像を選択する画像選択部を含むことを特徴とする。
例示的な実施形態の第32の態様は、第31の態様の眼科システムであって、前記情報処理装置は、前記画像選択部により前記第1画像群及び前記第2画像群から選択された画像を含む画像群に基づいて3次元画像を構築する3次元画像構築部を含むことを特徴とする。
例示的な実施形態の第33の態様は、第30の態様の眼科システムであって、前記情報処理装置は、前記第1撮影系及び前記第2撮影系により実質的に同時に取得された2つの画像を比較することにより前記2つの画像のいずれかにアーティファクトが含まれるか判定し、前記2つの画像のいずれかにアーティファクトが含まれると判定されたときに当該アーティファクトを除去するアーティファクト除去部を含むことを特徴とする。
例示的な実施形態の第34の態様は、第33の態様の眼科システムであって、前記情報処理装置は、前記アーティファクト除去部によりアーティファクトが除去された画像を含む画像群に基づいて3次元画像を構築する3次元画像構築部を含むことを特徴とする。
例示的な実施形態の第35の態様は、第29の態様の眼科システムであって、前記情報処理装置は、前記撮影系により取得された前記複数の画像に基づいて3次元画像を構築する3次元画像構築部を含むことを特徴とする。
例示的な実施形態の第36の態様は、第32、34及び35の態様のいずれかの眼科システムであって、前記移動機構は、前記照明系の光軸を回転軸として前記照明系及び前記撮影系を一体的に回転する回転機構を含み、前記照明系及び前記撮影系が第1回転位置に配置されているときに、前記撮影系は、前記複数の画像を取得し、前記第1回転位置と異なる第2回転位置に前記照明系及び前記撮影系が配置されているときに、前記撮影系は、前記照明系によりスリット光が照射されている前記前眼部の画像を取得し、前記3次元画像構築部は、前記第2回転位置において取得された前記画像に基づいて前記複数の画像の相対位置を決定する画像位置決定部を含むことを特徴とする。
例示的な実施形態の第37の態様は、第32、34~36の態様のいずれかの眼科システムであって、前記3次元画像構築部は、前記複数の画像のそれぞれから、前記スリット光の照射領域に対応する画像領域を抽出する画像領域抽出部と、前記画像領域抽出部により前記複数の画像からそれぞれ抽出された複数の画像領域を合成して3次元画像を構築する画像合成部とを含むことを特徴とする。
例示的な実施形態の第38の態様は、第37の態様の眼科システムであって、前記画像領域抽出部は、前記複数の画像のそれぞれから、前記スリット光の照射領域及び前記前眼部の所定部位の双方に対応する画像領域を抽出することを特徴とする。
例示的な実施形態の第39の態様は、第38の態様の眼科システムであって、前記所定部位は、角膜前面及び水晶体後面により画成される部位であることを特徴とする。
例示的な実施形態の第40の態様は、第32、34~39の態様のいずれかの眼科システムであって、前記情報処理装置は、前記3次元画像をレンダリングしてレンダリング画像を構築するレンダリング部を含むことを特徴とする。
例示的な実施形態の第41の態様は、第40の態様の眼科システムであって、前記3次元画像に対して断面が指定されたとき、前記レンダリング部は、前記3次元画像を当該断面で切断して3次元部分画像を構築することを特徴とする。
例示的な実施形態の第42の態様は、第40の態様の眼科システムであって、前記3次元画像に対して断面が指定されたとき、前記レンダリング部は、当該断面を表す2次元断面画像を構築することを特徴とする。
例示的な実施形態の第43の態様は、第40の態様の眼科システムであって、前記3次元画像に対してスライスが指定されたとき、前記レンダリング部は、当該スライスに対応する3次元スライス画像を構築することを特徴とする。
例示的な実施形態の第44の態様は、第29~43の態様のいずれかの眼科システムであって、前記情報処理装置は、前記照明系の光軸と前記撮影系の光軸とがなす角度である光軸角度に起因する歪みを補正するための処理を、前記複数の画像のうちの少なくとも1つに適用する歪み補正部を含むことを特徴とする。
例示的な実施形態の第45の態様は、第44の態様の眼科システムであって、前記撮影系に含まれる前記光学系の光軸は、前記照明系の光軸に対して、前記照明系の光軸に沿う第1方向及び前記スリット光の長手方向に沿う第2方向の双方に直交する第3方向に傾斜して配置されており、前記歪み補正部は、前記第1方向及び前記第2方向の双方を含む平面における歪みを補正するための処理を実行することを特徴とする。
例示的な実施形態の第46の態様は、第44又は45の態様の眼科システムであって、前記歪み補正部は、所定の基準角度と前記光軸角度とに基づき設定された補正係数を予め記憶しており、当該補正係数に基づいて前記歪みを補正するための処理を実行することを特徴とする。
例示的な実施形態の第47の態様は、第29~46の態様のいずれかの眼科システムであって、前記情報処理装置は、前記撮影系により取得された前記複数の画像のうちの少なくとも1つを解析することにより所定の計測値を求める第1計測部を含むことを特徴とする。
例示的な実施形態の第48の態様は、第32、34~43の態様のいずれかの眼科システムであって、前記情報処理装置は、前記3次元画像構築部により構築された前記3次元画像を解析することにより所定の計測値を求める第2計測部を含むことを特徴とする。
例示的な実施形態の第49の態様は、第29~48の態様のいずれかの眼科システムであって、前記照明系及び前記撮影系は、少なくとも角膜前面及び水晶体後面により画成される部位に前記撮影系のピントが合うように構成されていることを特徴とする。
例示的な実施形態の第50の態様は、第29~49の態様のいずれかの眼科システムであって、前記照明系は、被検者の体軸方向を長手方向とするスリット光を前記前眼部に照射し、前記移動機構は、前記体軸方向に直交する方向に前記照明系及び前記撮影系を移動することを特徴とする。
例示的な実施形態の第51の態様は、第50の態様の眼科システムであって、前記スリット光の長さは、前記体軸方向における角膜径以上であり、前記移動機構による前記照明系及び前記撮影系の移動距離は、前記体軸方向に直交する方向における角膜径以上であることを特徴とする。
例示的な実施形態の第52の態様は、第29~51の態様のいずれかの眼科システムであって、前記撮影系に含まれる前記光学系は、前記スリット光が照射されている前記前眼部からの光であって、前記照明系の光軸から離れる方向に進行する光を、前記照明系の光軸に近づく方向に反射する反射器と、前記反射器により反射された前記光を前記撮像面に結像させる1以上のレンズとを含むことを特徴とする。
例示的な実施形態の第53の態様は、第29~52の態様のいずれかの眼科システムであって、前記スリットランプ顕微鏡は、撮影系による前記複数の画像の取得と並行して前記前眼部を固定位置から動画撮影する動画撮影系を含むことを特徴とする。
例示的な実施形態の第54の態様は、第53の態様の眼科システムであって、前記スリットランプ顕微鏡は、前記動画撮影系により取得される動画像を解析して前記被検眼の運動を検出する運動検出部を含むことを特徴とする。
例示的な実施形態の第55の態様は、第54の態様の眼科システムであって、前記スリットランプ顕微鏡は、前記運動検出部からの出力に基づいて前記移動機構を制御する移動制御部を含むことを特徴とする。
例示的な実施形態によれば、高品質なスリットランプ顕微鏡検査を広く提供することが可能になる。
例示的な実施形態について、図面を参照しながら詳細に説明する。なお、本明細書にて引用した文献に開示された事項などの任意の公知技術を実施形態に組み合わせることができる。
実施形態に係るスリットランプ顕微鏡は、例えば、眼鏡店や医療施設に設置されてもよいし、可搬型であってもよい。実施形態に係るスリットランプ顕微鏡は、典型的には、同装置に関する専門技術保持者が側にいない状況や環境で使用される。なお、実施形態に係るスリットランプ顕微鏡は、専門技術保持者が側にいる状況や環境で使用されてもよいし、専門技術保持者が遠隔地から監視、指示、操作することが可能な状況や環境で使用されてもよい。
実施形態に係る眼科システムは、1以上のスリットランプ顕微鏡と、1以上の情報処理装置とを含み、例えば遠隔医療に使用可能である。情報処理装置は、スリットランプ顕微鏡により取得された画像を受けてこれを処理する。情報処理装置は、スリットランプ顕微鏡や他の情報処理装置にデータを送信可能であってよい。情報処理装置の用途は、例えば、画像解析、画像処理、読影などであってよい。
実施形態の眼科システムが遠隔医療に用いられる場合、スリットランプ顕微鏡により取得された画像の読影を、このスリットランプ顕微鏡が設置された施設から離れた遠隔地にいる者が行う。読影者は、典型的には医師であり、スリットランプ顕微鏡に関する専門技術の保持者である。また、情報処理技術(例えば、人工知能、画像解析、画像処理)を利用したコンピュータによる読影支援を採用することも可能である。
スリットランプ顕微鏡が設置される施設の例として、眼鏡店、オプトメトリスト、医療機関、健康診断会場、検診会場、患者の自宅、福祉施設、公共施設、検診車などがある。
実施形態に係るスリットランプ顕微鏡は、少なくともスリットランプ顕微鏡としての機能を有する眼科撮影装置であり、他の撮影機能(モダリティ)を更に備えていてもよい。他のモダリティの例として、眼底カメラ、SLO、OCTなどがある。実施形態に係るスリットランプ顕微鏡は、被検眼の特性を測定する機能を更に備えていてもよい。測定機能の例として、視力測定、屈折測定、眼圧測定、角膜内皮細胞測定、収差測定、視野測定などがある。実施形態に係るスリットランプ顕微鏡は、撮影画像や測定データを解析するためのアプリケーションを更に備えていてもよい。実施形態に係るスリットランプ顕微鏡は、治療や手術のための機能を更に備えていてもよい。その例として光凝固治療や光線力学的療法がある。
以下、様々な例示的な実施形態について説明する。これら実施形態のうちのいずれか2つ又はそれ以上を組み合わせることが可能である。また、これら実施形態のそれぞれ又は2以上の組み合わせに任意の公知技術に基づく変形(付加、置換等)を施すことが可能である。
以下に例示する実施形態において、「プロセッサ」は、例えば、CPU(Central Processing Unit)、GPU(Graphics Processing Unit)、ASIC(Application Specific Integrated Circuit)、プログラマブル論理デバイス(例えば、SPLD(Simple Programmable Logic Device)、CPLD(Complex Programmable Logic Device)、FPGA(Field Programmable Gate Array))等の回路を意味する。プロセッサは、例えば、記憶回路や記憶装置に格納されているプログラムやデータを読み出し実行することで、その実施形態に係る機能を実現する。
〈第1実施形態〉
第1実施形態に係るスリットランプ顕微鏡の例を図1に示す。
第1実施形態に係るスリットランプ顕微鏡の例を図1に示す。
スリットランプ顕微鏡1は、被検眼Eの前眼部撮影に用いられ、照明系2と、撮影系3と、移動機構6と、制御部7と、データ処理部8と、通信部9とを含む。なお、符号Cは角膜を示し、符号CLは水晶体を示す。
スリットランプ顕微鏡1は、単一の装置であってもよいし、2以上の装置を含むシステムであってもよい。後者の例として、スリットランプ顕微鏡1は、照明系2、撮影系3、及び移動機構6を含む本体装置と、制御部7、データ処理部8、及び通信部9を含むコンピュータと、本体装置とコンピュータとの間の通信を担う通信デバイスとを含む。コンピュータは、例えば、本体装置とともに設置されてもよいし、ネットワーク上に設置されていてもよい。
[照明系2]
照明系2は、被検眼Eの前眼部にスリット光を照射する。符号2aは、照明系2の光軸(照明光軸)を示す。照明系2は、従来のスリットランプ顕微鏡の照明系と同様の構成を備えていてよい。例えば、図示は省略するが、照明系2は、被検眼Eから遠い側から順に、照明光源と、正レンズと、スリット形成部と、対物レンズとを含む。
照明系2は、被検眼Eの前眼部にスリット光を照射する。符号2aは、照明系2の光軸(照明光軸)を示す。照明系2は、従来のスリットランプ顕微鏡の照明系と同様の構成を備えていてよい。例えば、図示は省略するが、照明系2は、被検眼Eから遠い側から順に、照明光源と、正レンズと、スリット形成部と、対物レンズとを含む。
照明光源は照明光を出力する。照明系2は複数の照明光源を備えていてよい。例えば、照明系2は、連続光を出力する照明光源と、フラッシュ光を出力する照明光源とを含んでいてよい。また、照明系2は、前眼部用照明光源と後眼部用照明光源とを含んでいてよい。また、照明系2は、出力波長が異なる2以上の照明光源を含んでいてよい。典型的な照明系2は、照明光源として可視光源を含む。照明系2は、赤外光源を含んでいてもよい。照明光源から出力された照明光は、正レンズを通過してスリット形成部に投射される。
スリット形成部は、照明光の一部を通過させてスリット光を生成する。典型的なスリット形成部は、一対のスリット刃を有する。これらスリット刃の間隔(スリット幅)を変更することで照明光が通過する領域(スリット)の幅を変更し、これによりスリット光の幅が変更される。また、スリット形成部は、スリット光の長さを変更可能に構成されてもよい。スリット光の長さとは、スリット幅に対応するスリット光の断面幅方向に直交する方向におけるスリット光の断面寸法である。スリット光の幅やスリット光の長さは、典型的には、スリット光の前眼部への投影像の寸法として表現される。
スリット形成部により生成されたスリット光は、対物レンズにより屈折されて被検眼Eの前眼部に照射される。
照明系2は、スリット光のフォーカス位置を変更するための合焦機構を更に含んでいてもよい。合焦機構は、例えば、対物レンズを照明光軸2aに沿って移動させる。対物レンズの移動は、自動及び/又は手動で実行可能である。なお、対物レンズとスリット形成部との間の照明光軸2a上の位置に合焦レンズを配置し、この合焦レンズを照明光軸2aに沿って移動させることによってスリット光のフォーカス位置を変更可能としてもよい。
なお、図1は上面図であり、同図に示すように、本実施形態では、被検眼Eの軸に沿う方向をZ方向とし、これに直交する方向のうち被検者にとって左右の方向をX方向とし、X方向及びZ方向の双方に直交する方向をY方向とする。典型的には、X方向は左眼と右眼との配列方向であり、Y方向は被検者の体軸に沿う方向(体軸方向)である。また、本実施形態では、照明光軸2aが被検眼Eの軸に一致するように、より広義には、照明光軸2aが被検眼Eの軸に平行に配置されるようにスリットランプ顕微鏡1のアライメントが実行される。アライメントについては後述する。
[撮影系3]
撮影系3は、照明系2からのスリット光が照射されている前眼部を撮影する。符号3aは、撮影系3の光軸(撮影光軸)を示す。本実施形態の撮影系3は、光学系4と、撮像素子5とを含む。
撮影系3は、照明系2からのスリット光が照射されている前眼部を撮影する。符号3aは、撮影系3の光軸(撮影光軸)を示す。本実施形態の撮影系3は、光学系4と、撮像素子5とを含む。
光学系4は、スリット光が照射されている被検眼Eの前眼部からの光を撮像素子5に導く。撮像素子5は、光学系4により導かれた光を撮像面にて受光する。
光学系4により導かれる光(つまり、被検眼Eの前眼部からの光)は、前眼部に照射されているスリット光の戻り光を含み、他の光を更に含んでいてよい。戻り光の例として、反射光、散乱光、蛍光がある。他の光の例として、スリットランプ顕微鏡1の設置環境からの光(室内光、太陽光など)がある。前眼部全体を照明するための前眼部照明系が照明系2とは別に設けられている場合、この前眼部照明光の戻り光が、光学系4により導かれる光に含まれてもよい。
撮像素子5は、2次元の撮像エリアを有するエリアセンサであり、例えば、電荷結合素子(CCD)イメージセンサや相補型金属酸化膜半導体(CMOS)イメージセンサであってよい。
光学系4は、例えば、従来のスリットランプ顕微鏡の撮影系と同様の構成を備えていてよい。例えば、光学系4は、被検眼Eに近い側から順に、対物レンズと、変倍光学系と、結像レンズとを含む。スリット光が照射されている被検眼Eの前眼部からの光は、対物レンズ及び変倍光学系を通過し、結像レンズにより撮像素子5の撮像面に結像される。
撮影系3は、例えば、第1撮影系と第2撮影系とを含んでいてよい。典型的には、第1撮影系と第2撮影系とは同じ構成を有する。撮影系3が第1撮影系と第2撮影系とを含む場合については他の実施形態において説明する。
撮影系3は、そのフォーカス位置を変更するための合焦機構を更に含んでいてもよい。合焦機構は、例えば、対物レンズを撮影光軸3aに沿って移動させる。対物レンズの移動は、自動及び/又は手動で実行可能である。なお、対物レンズと結像レンズとの間の撮影光軸3a上の位置に合焦レンズを配置し、この合焦レンズを撮影光軸3aに沿って移動させることによってフォーカス位置を変更可能としてもよい。
照明系2及び撮影系3は、シャインプルーフカメラとして機能する。すなわち、照明光軸2aに沿う物面と、光学系4と、撮像素子5の撮像面とが、いわゆるシャインプルーフの条件を満足するように、照明系2及び撮影系3が構成される。より具体的には、照明光軸2aを通るYZ面(物面を含む)と、光学系4の主面と、撮像素子5の撮像面とが、同一の直線上にて交差する。これにより、物面内の全ての位置(照明光軸2aに沿う方向における全ての位置)にピントを合わせて撮影を行うことができる。
本実施形態では、少なくとも角膜Cの前面及び水晶体CLの後面により画成される部位に撮影系3のピントが合うように、照明系2及び撮影系3が構成される。つまり、図1に示す角膜Cの前面の頂点(Z=Z1)から水晶体CLの後面の頂点(Z=Z2)までの範囲全体に撮影系3のピントが合っている状態で、撮影を行うことが可能である。なお、Z=Z0は、照明光軸2aと撮影光軸3aとの交点のZ座標を示す。
このような条件は、典型的には、照明系2に含まれる要素の構成及び配置、撮影系3に含まれる要素の構成及び配置、並びに、照明系2と撮影系3との相対位置によって実現される。照明系2と撮影系3との相対位置を示すパラメータは、例えば、照明光軸2aと撮影光軸3aとがなす角度θを含む。角度θは、例えば、17.5度、30度、又は45度に設定される。なお、角度θは可変であってもよい。
[移動機構6]
移動機構6は、照明系2及び撮影系3を移動する。本実施形態において、移動機構6は、照明系2及び撮影系3を一体的にX方向に移動する。
移動機構6は、照明系2及び撮影系3を移動する。本実施形態において、移動機構6は、照明系2及び撮影系3を一体的にX方向に移動する。
例えば、移動機構6は、照明系2及び撮影系3が搭載された可動ステージと、制御部7から入力される制御信号にしたがって動作するアクチュエータと、このアクチュエータにより発生された駆動力に基づき可動ステージを移動する機構とを含む。他の例において、移動機構6は、照明系2及び撮影系3が搭載された可動ステージと、図示しない操作デバイスに印加された力に基づき可動ステージを移動する機構とを含む。操作デバイスは、例えばレバーである。可動ステージは、少なくともX方向に移動可能であり、更にY方向及び/又はZ方向に移動可能であってよい。
[制御部7]
制御部7は、スリットランプ顕微鏡1の各部を制御する。例えば、制御部7は、照明系2の要素(照明光源、スリット形成部、合焦機構など)、撮影系3の要素(合焦機構、撮像素子など)、移動機構6、データ処理部8、通信部9などを制御する。また、制御部7は、照明系2と撮影系3との相対位置を変更するための制御を実行可能であってもよい。
制御部7は、スリットランプ顕微鏡1の各部を制御する。例えば、制御部7は、照明系2の要素(照明光源、スリット形成部、合焦機構など)、撮影系3の要素(合焦機構、撮像素子など)、移動機構6、データ処理部8、通信部9などを制御する。また、制御部7は、照明系2と撮影系3との相対位置を変更するための制御を実行可能であってもよい。
制御部7は、プロセッサ、主記憶装置、補助記憶装置などを含む。補助記憶装置には、制御プログラム等が記憶されている。制御プログラム等は、スリットランプ顕微鏡1がアクセス可能なコンピュータや記憶装置に記憶されていてもよい。制御部7の機能は、制御プログラム等のソフトウェアと、プロセッサ等のハードウェアとの協働によって実現される。
制御部7は、被検眼Eの前眼部の3次元領域をスリット光でスキャンするために、照明系2、撮影系3及び移動機構6に対して次のような制御を適用することができる。
まず、制御部7は、照明系2及び撮影系3を所定のスキャン開始位置に配置するように移動機構6を制御する(アライメント制御)。スキャン開始位置は、例えば、X方向における角膜Cの端部(第1端部)に相当する位置、又は、それよりも被検眼Eの軸から離れた位置である。図2Aにおける符号X0は、X方向における角膜Cの第1端部に相当するスキャン開始位置を示している。また、図2Bの符号X0’は、X方向における角膜Cの第1端部に相当する位置よりも被検眼Eの軸EAから離れたスキャン開始位置を示している。
制御部7は、照明系2を制御して、被検眼Eの前眼部に対するスリット光の照射を開始させる(スリット光照射制御)。なお、アライメント制御の実行前に、又は、アライメント制御の実行中に、スリット光照射制御を行ってもよい。照明系2は、典型的には連続光をスリット光として照射するが、断続光(パルス光)をスリット光として照射してもよい。また、照明系2は、典型的には可視光をスリット光として照射するが、赤外光をスリット光として照射してもよい。
制御部7は、撮影系3を制御して、被検眼Eの前眼部の動画撮影を開始させる(撮影制御)。なお、アライメント制御の実行前に、又は、アライメント制御の実行中に、撮影制御を行ってもよい。典型的には、スリット光照射制御と同時に、又は、スリット光照射制御よりも後に、撮影制御が実行される。
アライメント制御、スリット光照射制御、及び撮影制御の実行後、制御部7は、移動機構6を制御して、照明系2及び撮影系3の移動を開始する(移動制御)。移動制御により、照明系2及び撮影系3が一体的に移動される。つまり、照明系2と撮影系3との相対位置(角度θなど)を維持しつつ照明系2及び撮影系3が移動される。照明系2及び撮影系3の移動は、前述したスキャン開始位置から所定のスキャン終了位置まで行われる。スキャン終了位置は、例えば、スキャン開始位置と同様に、X方向において第1端部の反対側の角膜Cの端部(第2端部)に相当する位置、又は、それよりも被検眼Eの軸から離れた位置である。このような場合、スキャン開始位置からスキャン終了位置までの範囲がスキャン範囲となる。
典型的には、X方向を幅方向とし且つY方向を長手方向とするスリット光を前眼部に照射しつつ、且つ、照明系2及び撮影系3をX方向に移動しつつ、撮影系3による動画撮影が実行される。
ここで、スリット光の長さ(つまり、Y方向におけるスリット光の寸法)は、例えば、被検眼Eの表面において角膜Cの径以上に設定されている。すなわち、スリット光の長さは、Y方向における角膜径以上に設定されている。また、前述のように、移動機構6による照明系2及び撮影系3の移動距離(つまり、スキャン範囲)は、X方向における角膜径以上に設定されている。これにより、少なくとも角膜C全体をスリット光でスキャンすることができる。
このようなスキャンにより、スリット光の照射位置が異なる複数の前眼部画像が得られる。換言すると、スリット光の照射位置がX方向に移動する様が描写された動画像が得られる。このような複数の前眼部画像(つまり、動画像を構成するフレーム群)の例を図3に示す。
図3は、複数の前眼部画像(フレーム群)F1、F2、F3、・・・、FNを示す。これら前眼部画像Fn(n=1、2、・・・、N)の添字nは、時系列順序を表している。つまり、第n番目に取得された前眼部画像が符号Fnで表される。前眼部画像Fnには、スリット光照射領域Anが含まれている。図3に示すように、スリット光照射領域A1、A2、A3、・・・、ANは、時系列に沿って右方向に移動している。図3に示す例では、スキャン開始位置及びスキャン終了位置は、X方向における角膜Cの両端に対応する。なお、スキャン開始位置及び/又はスキャン終了位置は本例に限定されず、例えば、角膜端部よりも被検眼Eの軸から離れた位置であってよい。また、スキャンの向きや回数についても任意に設定することが可能である。
[データ処理部8]
データ処理部8は、各種のデータ処理を実行する。処理されるデータは、スリットランプ顕微鏡1により取得されたデータ、及び、外部から入力されたデータのいずれでもよい。例えば、データ処理部8は、照明系2及び撮影系3によって取得された画像を処理することができる。なお、データ処理部8の構成や機能については他の実施形態において説明する。
データ処理部8は、各種のデータ処理を実行する。処理されるデータは、スリットランプ顕微鏡1により取得されたデータ、及び、外部から入力されたデータのいずれでもよい。例えば、データ処理部8は、照明系2及び撮影系3によって取得された画像を処理することができる。なお、データ処理部8の構成や機能については他の実施形態において説明する。
データ処理部8は、プロセッサ、主記憶装置、補助記憶装置などを含む。補助記憶装置には、データ処理プログラム等が記憶されている。データ処理プログラム等は、スリットランプ顕微鏡1がアクセス可能なコンピュータや記憶装置に記憶されていてもよい。データ処理部8の機能は、データ処理プログラム等のソフトウェアと、プロセッサ等のハードウェアとの協働によって実現される。
[通信部9]
通信部9は、スリットランプ顕微鏡1と他の装置との間におけるデータ通信を行う。すなわち、通信部9は、他の装置へのデータの送信と、他の装置から送信されたデータの受信とを行う。
通信部9は、スリットランプ顕微鏡1と他の装置との間におけるデータ通信を行う。すなわち、通信部9は、他の装置へのデータの送信と、他の装置から送信されたデータの受信とを行う。
通信部9が実行するデータ通信の方式は任意である。例えば、通信部9は、インターネットに準拠した通信インターフェイス、専用線に準拠した通信インターフェイス、LANに準拠した通信インターフェイス、近距離通信に準拠した通信インターフェイスなど、各種の通信インターフェイスのうちの1以上を含む。データ通信は有線通信でも無線通信でもよい。
通信部9により送受信されるデータは暗号化されていてよい。その場合、例えば、制御部7及び/又はデータ処理部8は、通信部9により送信されるデータを暗号化する暗号化処理部、及び、通信部9により受信されたデータを復号化する復号化処理部の少なくとも一方を含む。
[他の要素]
図1に示す要素に加え、スリットランプ顕微鏡1は、表示デバイスや操作デバイスを備えていてよい。或いは、表示デバイスや操作デバイスは、スリットランプ顕微鏡1の周辺機器であってもよい。
図1に示す要素に加え、スリットランプ顕微鏡1は、表示デバイスや操作デバイスを備えていてよい。或いは、表示デバイスや操作デバイスは、スリットランプ顕微鏡1の周辺機器であってもよい。
表示デバイスは、制御部7の制御を受けて各種の情報を表示する。表示デバイスは、液晶ディスプレイ(LCD)などのフラットパネルディスプレイを含んでいてよい。
操作デバイスは、スリットランプ顕微鏡1を操作するためのデバイスや、情報を入力するためのデバイスを含む。操作デバイスは、例えば、ボタン、スイッチ、レバー、ダイアル、ハンドル、ノブ、マウス、キーボード、トラックボール、操作パネルなどを含む。
タッチスクリーンのように、表示デバイスと操作デバイスとが一体化したデバイスを用いてもよい。
被検者や補助者は、表示デバイス及び操作デバイスを用いることで、スリットランプ顕微鏡1の操作を行うことができる。
[アライメント]
被検眼Eに対するスリットランプ顕微鏡1のアライメントについて説明する。一般に、アライメントは、被検眼Eの撮影や測定のために好適な位置に装置光学系を配置させる動作である。本実施形態のアライメントは、図3に示すような動画像を取得するために好適な位置に照明系2及び撮影系3を配置させる動作である。
被検眼Eに対するスリットランプ顕微鏡1のアライメントについて説明する。一般に、アライメントは、被検眼Eの撮影や測定のために好適な位置に装置光学系を配置させる動作である。本実施形態のアライメントは、図3に示すような動画像を取得するために好適な位置に照明系2及び撮影系3を配置させる動作である。
眼科装置のアライメントには様々な手法がある。以下、幾つかのアライメント手法を例示するが、本実施形態に適用可能な手法はこれらに限定されない。
本実施形態に適用可能なアライメント手法としてステレオアライメントがある。ステレオアライメントは、2以上の異なる方向から前眼部を撮影可能な眼科装置において適用可能であり、その具体的な手法は、本出願人による特開2013-248376号公報などに開示されている。ステレオアライメントは、例えば次の工程を含む:2以上の前眼部カメラが前眼部を異なる方向から撮影して2以上の撮影画像を取得する工程;プロセッサがこれら撮影画像を解析して被検眼の3次元位置を求める工程;求められた3次元位置に基づいてプロセッサが光学系の移動制御を行う工程。これにより、光学系(本例では照明系2及び撮影系3)が、被検眼に対して好適な位置に配置される。典型的なステレオアライメントでは、被検眼の瞳孔(瞳孔の中心又は重心)の位置が基準とされる。
このようなステレオアライメントの他にも、アライメント光により得られるプルキンエ像を利用した手法や、光テコを利用した手法など、任意の公知のアライメント手法を採用することが可能である。プルキンエ像を利用した手法や光テコを利用した手法では、被検眼の角膜頂点の位置が基準とされる。
なお、以上の例示を含む従来の典型的なアライメント手法は、被検眼の軸と光学系の光軸とを一致させることを目的として行われるが、本実施形態では、スキャン開始位置に対応する位置に照明系2及び撮影系3を配置させるようにアライメントを実行することが可能である。
本実施形態におけるアライメントの第1の例として、上記したアライメント手法のいずれかを適用して被検眼Eの瞳孔又は角膜頂点を基準としたアライメントを行った後、予め設定された角膜半径の標準値に相当する距離だけ照明系2及び撮影系3を(X方向に)移動することができる。なお、標準値を用いる代わりに、被検眼Eの角膜半径の測定値を用いてもよい。
第2の例として、上記したアライメント手法のいずれかを適用して被検眼Eの瞳孔又は角膜頂点を基準としたアライメントを行った後、被検眼Eの前眼部の画像を解析して角膜半径を測定し、この測定値に相当する距離だけ照明系2及び撮影系3を(X方向に)移動することができる。本例で解析される前眼部の画像は、例えば、撮影系3により得られた前眼部画像、又は、他の画像である。他の画像は、前眼部カメラにより得られた画像、前眼部OCTにより得られた画像など、任意の画像であってよい。
第3の例として、ステレオアライメント用の前眼部カメラ又は撮影系3により得られた前眼部の画像を解析して角膜の第1端部を求め、ステレオアライメントを適用してこの第1端部に対応する位置に照明系2及び撮影系3を移動することができる。
なお、上記したアライメント手法のいずれかを適用して被検眼Eの瞳孔又は角膜頂点を基準としたアライメントを実行し、これにより決定された位置からスリット光による前眼部スキャンを開始するようにしてもよい。この場合においても、角膜Cの全体をスキャンするようにスキャンシーケンスを設定することができる。例えば、当該アライメントにより決定された位置から左方にスキャンを行った後、右方にスキャンを行うように、スキャンシーケンスが設定される。
[その他の事項]
スリットランプ顕微鏡1は、被検眼Eを固視させるための光(固視光)を出力する固視系を備えていてよい。固視系は、典型的には、少なくとも1つの可視光源(固視光源)、又は、風景チャートや固視標等の画像を表示する表示デバイスを含む。固視系は、例えば、照明系2又は撮影系3と同軸又は非同軸に配置される。
スリットランプ顕微鏡1は、被検眼Eを固視させるための光(固視光)を出力する固視系を備えていてよい。固視系は、典型的には、少なくとも1つの可視光源(固視光源)、又は、風景チャートや固視標等の画像を表示する表示デバイスを含む。固視系は、例えば、照明系2又は撮影系3と同軸又は非同軸に配置される。
スリットランプ顕微鏡1により取得可能な画像の種別は、前述した前眼部の動画像(複数の前眼部画像)に限定されない。例えば、スリットランプ顕微鏡1は、この動画像に基づく3次元画像、この3次元画像に基づくレンダリング画像、徹照像、被検眼に装用されたコンタクトレンズの動きを表す動画像、蛍光剤適用によるコンタクトレンズと角膜表面との隙間を表す画像などがある。レンダリング画像については他の実施形態において説明する。徹照像は、照明光の網膜反射を利用して眼内の混濁や異物を描出する徹照法により得られる画像である。なお、眼底撮影、角膜内皮細胞撮影、マイボーム腺撮影などが可能であってもよい。
[使用形態]
スリットランプ顕微鏡1(これを含むシステム)の使用形態を説明する。図4は使用形態の例を示す。
スリットランプ顕微鏡1(これを含むシステム)の使用形態を説明する。図4は使用形態の例を示す。
図示は省略するが、任意の段階で、被検者又は補助者は、スリットランプ顕微鏡1に被検者情報を入力する。入力された被検者情報は、制御部7に保存される。被検者情報は、典型的には、被検者の識別情報(被検者ID)を含む。
更に、背景情報の入力を行うことができる。背景情報は、被検者に関する任意の情報であって、その例として、被検者の問診情報、所定のシートに被検者が記入した情報、被検者の電子カルテに記録された情報などがある。典型的には、背景情報は、性別、年齢、身長、体重、疾患名、候補疾患名、検査結果(視力値、眼屈折力値、眼圧値など)、屈折矯正具(眼鏡、コンタクトレンズなど)の装用歴や度数、検査歴、治療歴などがある。これらは例示であって、背景情報はこれらに限定されない。
(S1:テーブル、イス、顎受け台を調整)
まず、スリットランプ顕微鏡1が設置されているテーブル、被検者が座るイス、スリットランプ顕微鏡1の顎受け台の調整が行われる(いずれも図示を省略する)。例えば、テーブル、イス、顎受け台の高さ調整が行われる。これらの調整は、例えば、被検者自身によって行われる。或いは、補助者がこれら調整のいずれかを行ってもよい。なお、顎受け台には、被検者の顔を安定配置させるための顎受け部及び額当てが設けられている。
まず、スリットランプ顕微鏡1が設置されているテーブル、被検者が座るイス、スリットランプ顕微鏡1の顎受け台の調整が行われる(いずれも図示を省略する)。例えば、テーブル、イス、顎受け台の高さ調整が行われる。これらの調整は、例えば、被検者自身によって行われる。或いは、補助者がこれら調整のいずれかを行ってもよい。なお、顎受け台には、被検者の顔を安定配置させるための顎受け部及び額当てが設けられている。
(S2:撮影開始を指示)
ステップS1の調整が完了したら、被検者は、イスに腰掛け、顎受けに顎を載せ、額当てに額を当接させる。これらの動作の前又は後に、被検者又は補助者は、被検眼の撮影開始の指示操作を行う。この操作は、例えば、図示しない撮影開始トリガーボタンの押下である。
ステップS1の調整が完了したら、被検者は、イスに腰掛け、顎受けに顎を載せ、額当てに額を当接させる。これらの動作の前又は後に、被検者又は補助者は、被検眼の撮影開始の指示操作を行う。この操作は、例えば、図示しない撮影開始トリガーボタンの押下である。
(S3:アライメント)
ステップS2の指示を受けて、スリットランプ顕微鏡1は、前述した要領で、被検眼Eに対するアライメントを行う。アライメントの完了後にフォーカス調整を行うようにしてもよい。
ステップS2の指示を受けて、スリットランプ顕微鏡1は、前述した要領で、被検眼Eに対するアライメントを行う。アライメントの完了後にフォーカス調整を行うようにしてもよい。
(S4:前眼部をスキャン)
スリットランプ顕微鏡1は、前述した要領で、照明系2によるスリット光の照射と、撮影系3による動画撮影と、移動機構6による照明系2及び撮影系3の移動とを組み合わせることで、被検眼Eの前眼部をスキャンする。これにより、例えば、図3に示す複数の前眼部画像F1~FNが得られる。
スリットランプ顕微鏡1は、前述した要領で、照明系2によるスリット光の照射と、撮影系3による動画撮影と、移動機構6による照明系2及び撮影系3の移動とを組み合わせることで、被検眼Eの前眼部をスキャンする。これにより、例えば、図3に示す複数の前眼部画像F1~FNが得られる。
データ処理部8は、前眼部画像F1~FNの少なくともいずれかを処理することができる。例えば、他の実施形態で説明するように、データ処理部8は、前眼部画像F1~FNに基づいて3次元画像を構築することができる。また、所定の画像処理や所定の画像解析を行うことも可能である。
(S5:画像を送信)
制御部7は、通信部9を制御して、スリットランプ顕微鏡1により取得された前眼部の画像(前眼部画像F1~FN、前眼部画像F1~FNの一部、前眼部画像F1~FNに基づく3次元画像など)を他の装置に送信する。
制御部7は、通信部9を制御して、スリットランプ顕微鏡1により取得された前眼部の画像(前眼部画像F1~FN、前眼部画像F1~FNの一部、前眼部画像F1~FNに基づく3次元画像など)を他の装置に送信する。
他の装置の例として情報処理装置や記憶装置がある。情報処理装置は、例えば、広域回線上のサーバ、LAN上のサーバ、コンピュータ端末などである。記憶装置は、広域回線上に設けられた記憶装置、LAN上に設けられた記憶装置などである。
前眼部の画像とともに背景情報を送信することができる。また、前眼部の画像とともに被検者の識別情報が送信される。この識別情報は、スリットランプ顕微鏡1に入力された被検者ID(前述)でもよいし、被検者IDに基づき生成された識別情報でもよい。後者の例として、スリットランプ顕微鏡1が設置されている施設内での個人識別に用いられる被検者ID(内部識別情報)を、当該施設外にて用いられる外部識別情報に変換することができる。これにより、前眼部の画像や背景情報などの個人情報に関する情報セキュリティの向上を図ることが可能である。
(S6:観察及び診断)
ステップS5でスリットランプ顕微鏡1から送信された被検眼Eの前眼部の画像(及び、被検者の識別情報、背景情報など)は、直接的又は間接的に、例えば医師(又はオプトメトリスト)が使用する情報処理装置に送られる。
ステップS5でスリットランプ顕微鏡1から送信された被検眼Eの前眼部の画像(及び、被検者の識別情報、背景情報など)は、直接的又は間接的に、例えば医師(又はオプトメトリスト)が使用する情報処理装置に送られる。
医師(又はオプトメトリスト)は、被検眼Eの前眼部の画像を観察することができる。このとき、例えば、前眼部画像F1~FNを所定数枚ずつ表示させることや、前眼部画像F1~FNを一覧表示することや、前眼部画像F1~FNをスライドショー表示することや、前眼部画像F1~FNから3次元画像を構築することや、3次元画像のレンダリング画像を表示することが可能である。
医師(又はオプトメトリスト)は、被検眼Eの前眼部の画像を観察することで画像診断(読影)を行うことができる。医師(又はオプトメトリスト)は、読影で得た情報が記録されたレポートを作成することができる。レポートは、例えば、スリットランプ顕微鏡1が設置されている施設に送信される。或いは、被検者が登録したアドレス情報(電子メールアドレス、住所など)にレポートを送信してもよい。以上で、本例に係る処理は終了となる。
[効果]
本実施形態により奏される効果を説明する。
本実施形態により奏される効果を説明する。
スリットランプ顕微鏡1は、照明系2と、撮影系3と、移動機構6とを含む。照明系2は、被検眼Eの前眼部にスリット光を照射する。撮影系3は、スリット光が照射されている前眼部からの光を導く光学系4と、光学系4により導かれた光を撮像面で受光する撮像素子5とを含む。移動機構6は、照明系2及び撮影系3を移動する。
照明系2の光軸(照明光軸)2aに沿う物面と、光学系4と、撮像素子5の撮像面とが、シャインプルーフの条件を満足するように、照明系2及び撮影系3が構成されている。
撮影系3は、移動機構6による照明系2及び撮影系3の移動と並行して繰り返し撮影を行うことにより、被検眼Eの前眼部の複数の画像を取得する。典型的には、この繰り返し撮影は動画撮影であり、それにより、複数の前眼部画像からなる動画像が取得される。
このようなスリットランプ顕微鏡1によれば、照明系2及び撮影系3を移動することにより、被検眼Eの前眼部の3次元領域をスリット光でスキャンすることができ、当該3次元領域を表す画像を取得することができる。したがって、医師やオプトメトリストは、スリットランプ顕微鏡1によって取得された画像を観察して前眼部の所望の部位の状態を把握することが可能である。
また、スリットランプ顕微鏡1により取得された画像を、遠隔地にいる医師やオプトメトリストに提供することができる。典型的には、スリットランプ顕微鏡1は、通信部9により、被検眼Eの前眼部について取得された画像を、医師やオプトメトリストが使用する情報処理装置に向けて送信することができる。なお、通信部9を設けることは任意的である。スリットランプ顕微鏡1により取得された画像の提供方法は、このようなデータ通信に限定されず、画像が記録された記録媒体や印刷媒体を提供するなどの方法であってもよい。記録媒体への記録は当該記録媒体に準拠した記録デバイス(データライタ)により行われ、印刷媒体への記録は印刷装置により行われる。
また、スリットランプ顕微鏡1は、照明光軸2aに沿う物面と光学系4と撮像素子5の撮像面とがシャインプルーフの条件を満足するように構成されているので、深さ方向(Z方向)の広い範囲にピントを合わせることが可能である。例えば、照明系2及び撮影系3は、少なくとも角膜前面及び水晶体後面により画成される部位に撮影系3のピントが合うように構成される。これにより、スリットランプ顕微鏡検査の対象となる前眼部の主要な部位の全体を高精細に画像化することが可能になる。なお、ピントが合う範囲は、角膜前面及び水晶体後面により画成される領域に限定されず、任意に設定可能である。
シャインプルーフの条件を満足しない構成が適用される場合において、深さ方向の広い範囲にピントを合わせて3次元領域を撮影するには、前眼部の各箇所にピントを合わせつつ、角膜前面の形状に応じた曲線状の経路に沿って照明系及び撮影系を移動させる必要があるが、このような操作や制御は煩雑であり、実用的とは言えない。
また、照明系2は、被検者の体軸方向(Y方向)を長手方向とするスリット光を前眼部に照射されていてよい。更に、移動機構6は、被検者の体軸方向に直交する方向(X方向)に照明系2及び撮影系3を移動可能に構成されていてよい。なお、スリット光の向きや移動方向はこれらに限定されず、任意に設定可能であるが、典型的には移動方向はスリット光の幅方向に設定される。
体軸方向を長手方向とするスリット光が照射され、且つ、体軸方向に直交する方向に照明系2及び撮影系3が移動される場合において、スリット光の長さ(体軸方向におけるスリット光の寸法)が体軸方向における角膜径以上になるように、照明系2を構成することができる。加えて、移動機構6による照明系2及び撮影系3の移動距離が、体軸方向に直交する方向(X方向)における角膜径以上であるように、移動機構6を構成することができる。この角膜径は、被検眼Eの角膜径でもよいし、標準的な角膜径でもよい。なお、スリット光の長さや移動距離はこれらに限定されず、任意に設定可能である。
このような構成によれば、角膜全体について画像を取得することができる。更に、シャインプルーフの条件を満足する構成と組み合わせることで、角膜全体を表すとともに十分な深さ範囲を表す画像を取得することが可能になる。
以上のように、スリットランプ顕微鏡1によれば、専門技術の保持者が微細で煩雑な操作を行わなくとも、前眼部の広い範囲(3次元領域)を表す高品質の画像を自動で取得することができる。読影者は、スリットランプ顕微鏡1により取得された画像の提供を受けて観察や診断を行うことが可能である。
したがって、専門技術保持者が不足しているという問題の解消を図ることができ、高品質なスリットランプ顕微鏡検査を広く提供することが可能となる。例えば、このようなスリットランプ顕微鏡1は、前眼部疾患などのスクリーニングにおいて有効と言える。
以下、スリットランプ顕微鏡1に組み合わせることが可能な例示的機能及び例示的構成について説明する。以下の実施形態において、第1実施形態と同様の要素を同じ符号で示すことがある。また、以下の実施形態において示す図において、第1実施形態と同様の要素を省略することがある。
〈第2実施形態〉
本実施形態では、第1実施形態のスリットランプ顕微鏡1に適用可能な光学系の構成について説明する。その一例を図5に示す。なお、図5に示す要素群に加えて、他の実施形態に示す要素が設けられていてよい。例えば、第1の実施形態の制御部7、データ処理部8、通信部9などが設けられていてよい。
本実施形態では、第1実施形態のスリットランプ顕微鏡1に適用可能な光学系の構成について説明する。その一例を図5に示す。なお、図5に示す要素群に加えて、他の実施形態に示す要素が設けられていてよい。例えば、第1の実施形態の制御部7、データ処理部8、通信部9などが設けられていてよい。
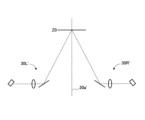
図5に示す照明系20は第1実施形態の照明系2の例であり、左撮影系30L及び右撮影系30Rは撮影系3の例である。符号20aは照明系20の光軸(照明光軸)を示し、符号30Laは左撮影系30Lの光軸(左撮影光軸)を示し、符号30Raは右撮影系30Rの光軸(右撮影光軸)を示す。左撮影光軸30Laと右撮影光軸30Raとは、互いに異なる向きに配置されている。照明光軸20aと左撮影光軸30Laとがなす角度をθLで示し、照明光軸20aと右撮影光軸30Raとがなす角度をθRで示す。角度θLと角度θRとは、互いに等しくてもよいし異なってもよい。照明光軸20aと左撮影光軸30Laと右撮影光軸30Raとは、一点で交差する。図1と同様に、この交点のZ座標をZ0で示す。
移動機構6は、照明系20、左撮影系30L及び右撮影系30Rを、矢印49で示す方向(X方向)に移動可能である。典型的には、照明系20、左撮影系30L及び右撮影系30Rは、少なくともX方向に移動可能なステージ上に載置されており、且つ、移動機構6は、制御部7からの制御信号にしたがって、この可動ステージを移動させる。
照明系20は、被検眼Eの前眼部にスリット光を照射する。照明系20は、従来のスリットランプ顕微鏡の照明系と同様に、被検眼Eから遠い側から順に、照明光源21と、正レンズ22と、スリット形成部23と、対物レンズ群24及び25とを含む。
照明光源21から出力された照明光(典型的には可視光)は、正レンズ22により屈折されてスリット形成部23に投射される。投射された照明光の一部は、スリット形成部23が形成するスリットを通過してスリット光となる。生成されたスリット光は、対物レンズ群24及び25により屈折された後、ビームスプリッタ47により反射され、被検眼Eの前眼部に照射される。
左撮影系30Lは、反射器31Lと、結像レンズ32Lと、撮像素子33Lとを含む。反射器31L及び結像レンズ32Lは、照明系20によりスリット光が照射されている前眼部からの光(左撮影系30Lの方向に進行する光)を撮像素子33Lに導く。
前眼部から左撮影系30Lの方向に進行する光は、スリット光が照射されている前眼部からの光であって、照明光軸20aから離れる方向に進行する光である。反射器31Lは、当該光を照明光軸20aに近づく方向に反射する。結像レンズ32Lは、反射器31Lにより反射された光を屈折して撮像素子33Lの撮像面34Lに結像する。撮像素子33Lは、当該光を撮像面34Lにて受光する。
第1実施形態と同様に、左撮影系30Lは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行う。これにより複数の前眼部画像が得られる。
第1実施形態と同様に、照明光軸20aに沿う物面と、反射器31L及び結像レンズ32Lを含む光学系と、撮像面34Lとは、シャインプルーフの条件を満足する。より具体的には、反射器31Lによる撮影系30Lの光路の偏向を考慮すると、照明光軸20aを通るYZ面(物面を含む)と、結像レンズ32Lの主面と、撮像面34Lとが、同一の直線上にて交差する。これにより、左撮影系30Lは、物面内の全ての位置(例えば、角膜前面から水晶体後面までの範囲)にピントを合わせて撮影を行うことができる。
右撮影系30Rは、反射器31Rと、結像レンズ32Rと、撮像素子33Rとを含む。左撮影系30Lと同様に、右撮影系30Rは、照明系20によりスリット光が照射されている前眼部からの光を、反射器31R及び結像レンズ32Rによって、撮像素子33Rの撮像面34Rに導く。更に、左撮影系30Lと同様に、右撮影系30Rは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことで、複数の前眼部画像を取得する。左撮影系30Lと同様に、照明光軸20aに沿う物面と、反射器31R及び結像レンズ32Rを含む光学系と、撮像面34Rとは、シャインプルーフの条件を満足する。
制御部7は、左撮影系30Lによる繰り返し撮影と、右撮影系30Rによる繰り返し撮影とを同期させることができる。これにより、左撮影系30Lにより得られた複数の前眼部画像と、右撮影系30Rにより得られた複数の前眼部画像との間の対応関係が得られる。この対応関係は、時間的な対応関係であり、より具体的には、実質的に同時に取得された画像同士をペアリングするものである。
或いは、制御部7又はデータ処理部8は、左撮影系30Lにより得られた複数の前眼部画像と、右撮影系30Rにより得られた複数の前眼部画像との間の対応関係を求める処理を実行することができる。例えば、制御部7又はデータ処理部8は、左撮影系30Lから逐次に入力される前眼部画像と、右撮影系30Rから逐次に入力される前眼部画像とを、それらの入力タイミングによってペアリングすることができる。
本実施形態は、動画撮影系40を更に含む。動画撮影系40は、左撮影系30L及び右撮影系30Rによる撮影と並行して、被検眼Eの前眼部を固定位置から動画撮影する。「固定位置から動画撮影」とは、照明系20、左撮影系30L及び右撮影系30Rと異なり、動画撮影系40が移動機構6により移動されないことを表す。
本実施形態の動画撮影系40は、照明系20と同軸に配置されているが、その配置はこれに限定されない。例えば、照明系20と非同軸に動画撮影系を配置することができる。また、動画撮影系40が感度を有する帯域の照明光で前眼部を照明する光学系が設けられていてもよい。
ビームスプリッタ47を透過した光は、反射器48により反射されて動画撮影系40に入射する。動画撮影系40に入射した光は、対物レンズ41により屈折された後、結像レンズ42によって撮像素子43の撮像面に結像される。撮像素子43はエリアセンサである。
動画撮影系40が設けられている場合、被検眼Eの動きをモニタすることや、トラッキングを行うことができる。トラッキングは、被検眼Eの動きに光学系を追従させるための処理である。このような処理については他の実施形態で説明する。
照明系20の出力波長及び動画撮影系40の検出波長に応じ、ビームスプリッタ47は、例えばダイクロイックミラー又はハーフミラーである。
本実施形態により奏される効果を説明する。
本実施形態は、第1実施形態の撮影系3の例であり、左撮影系30Lと右撮影系30Rとを含む。左撮影系30Lと右撮影系30Rとの組み合わせは、第1撮影系と第2撮影系との組み合わせの例である。
左撮影系30Lは、スリット光が照射されている前眼部からの光を導く反射器31L及び結像レンズ32L(第1光学系)と、導かれた光を撮像面34L(第1撮像面)で受光する撮像素子33L(第1撮像素子)とを含む。同様に、右撮影系30Rは、スリット光が照射されている前眼部からの光を導く反射器31R及び結像レンズ32R(第2光学系)と、導かれた光を撮像面34R(第2撮像面)で受光する撮像素子33R(第2撮像素子)とを含む。
左撮影系30Lの光軸(左撮影光軸30La)と右撮影系30Rの光軸(右撮影光軸30Ra)とは、互いに異なる向きに配置されている。更に、照明系20の光軸(照明光軸20a)に沿う物面と、反射器31L及び結像レンズ32Lと、撮像面34Lとは、シャインプルーフの条件を満足する。同様に、当該物面と、反射器31L及び結像レンズ32Lと、撮像面34Lとは、シャインプルーフの条件を満足する。
左撮影系30Lは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第1画像群を取得する。同様に、右撮影系30Rは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第2画像群を取得する。
このような構成によれば、スリット光が照射されている前眼部を、互いに異なる方向からそれぞれ動画撮影することができる。一方の撮影系により取得された画像にアーティファクトが含まれる場合であっても、他方の撮影系により当該画像と実質的に同時に取得された画像にはアーティファクトが含まれない場合がある。また、双方の撮影系により実質的に同時に取得された一対の画像の双方にアーティファクトが含まれる場合であって、一方の画像中のアーティファクトが注目領域(例えばスリット光照射領域)に重なっている場合でも、他方の画像中のアーティファクトが注目領域に重なっていない場合がある。したがって、好適な画像を取得できる可能性が高まる。実質的に同時に取得された一対の画像から好適な画像を取得する処理については後述する。
なお、撮影系3は、第1撮影系及び第2撮影系に加え、同様の構成の第3撮影系、・・・、第K撮影系(Kは3以上の整数)を含んでいてもよい。
本実施形態の左撮影系30Lは、反射器31Lと結像レンズ32Lとを含む。反射器31Lは、スリット光が照射されている前眼部からの光であって、照明光軸20aから離れる方向に進行する光を、照明光軸20aに近づく方向に反射する。更に、結像レンズ32Lは、反射器31Lにより反射された光を撮像面34Lに結像させる。ここで、結像レンズ32Lは、1以上のレンズを含む。
同様に、右撮影系30Rは、反射器31Rと結像レンズ32Rとを含む。反射器31Rは、スリット光が照射されている前眼部からの光であって、照明光軸20aから離れる方向に進行する光を、照明光軸20aに近づく方向に反射する。更に、結像レンズ32Rは、反射器31Rにより反射された光を撮像面34Rに結像させる。ここで、結像レンズ32Rは、1以上のレンズを含む。
このような構成によれば、装置の小型化を図ることが可能である。すなわち、撮像素子33L(33R)により取得された画像は、撮像面34L(34R)の反対側の面から延びるケーブルを通じて出力されるが、本構成によれば、照明光軸20aに比較的近接して位置する撮像素子33L(33R)の背面から被検眼Eとは反対方向に向かって、ケーブルを配置することができる。したがって、ケーブルの引き回しを好適に行うことができ、装置の小型化を図ることが可能になる。
また、本構成によれば、角度θL及び角度θRを大きく設定することが可能となるため、一方の撮影系により取得された画像にアーティファクトが含まれる場合において、他方の撮影系により当該画像と実質的に同時に取得された画像にアーティファクトが含まれない可能性を高めることができる。また、双方の撮影系により実質的に同時に取得された一対の画像の双方にアーティファクトが含まれる場合であって、一方の画像中のアーティファクトが注目領域(例えばスリット光照射領域)に重なっている場合において、他方の画像中のアーティファクトが注目領域に重なっている可能性を低減することができる。
本実施形態は、動画撮影系40を含む。左撮影系30L及び右撮影系30Rは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して、前眼部を繰り返し撮影する。この繰り返し撮影と並行して、動画撮影系40は、前眼部を固定位置から動画撮影する。
このような構成によれば、スリット光による前眼部のスキャンと並行して固定位置(例えば正面)から動画撮影を行うことで、スキャン中における被検眼Eの状態を把握することや、被検眼Eの状態に応じた制御を行うことが可能である。その例については他の実施形態にて説明する。
図5に示す構成の代わりに適用可能な光学系の例を図6に示す。なお、要素毎の符号は省略する。本例に係る光学系の左撮影系30L’において、反射器は、スリット光が照射されている前眼部からの光であって、照明光軸20a’から離れる方向に進行する光を、照明光軸20aから更に離れる方向に反射する。更に、結像レンズは、反射器により反射された光を撮像素子の撮像面に結像させる。
このような構成を採用することも可能であるが、照明光軸20a’から比較的遠くに位置する撮像素子の背面から側方(又は被検眼Eに向かう方向)にケーブルが配置されるため、ケーブルの引き回しを好適に行えないという問題が伴う。
〈第3実施形態〉
本実施形態では、第1実施形態のスリットランプ顕微鏡1に適用可能な処理系の構成について説明する。なお、本実施形態の撮影系3においては、例えば第2実施形態で説明した図5のように、左撮影光軸30Laと右撮影光軸30Raとが照明光軸20aに対して互いに反対の方向に傾斜して配置されている。本実施形態の処理系は、次のようなアーティファクトに係る処理を実行する。
本実施形態では、第1実施形態のスリットランプ顕微鏡1に適用可能な処理系の構成について説明する。なお、本実施形態の撮影系3においては、例えば第2実施形態で説明した図5のように、左撮影光軸30Laと右撮影光軸30Raとが照明光軸20aに対して互いに反対の方向に傾斜して配置されている。本実施形態の処理系は、次のようなアーティファクトに係る処理を実行する。
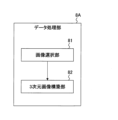
図7に示すデータ処理部8Aは、第1実施形態のデータ処理部8の例である。データ処理部8Aは画像選択部81を含む。
画像選択部81は、左撮影系30L及び右撮影系30Rにより実質的に同時に取得された2つの画像のいずれかにアーティファクトが含まれるか判定する。アーティファクト判定は、所定の画像解析を含み、典型的には、画素に割り当てられた輝度情報に関する閾値処理を含む。
この閾値処理では、例えば、予め設定された閾値を超える輝度値が割り当てられた画素が特定される。典型的には、閾値は、画像中のスリット光照射領域の輝度値よりも高く設定される。この場合、画像選択部81は、スリット光の照射領域をアーティファクトとして判定せず、且つ、それよりも明るい像(例えば正反射像)をアーティファクトとして判定する。
画像選択部81は、アーティファクト判定のために、例えば、パターン認識、セグメンテーション、エッジ検出など、閾値処理以外の任意の画像解析を実行してもよい。一般に、画像解析、画像処理、人工知能、コグニティブ・コンピューティングなど、任意の情報処理技術を、アーティファクト判定に適用することが可能である。
アーティファクト判定の結果、左撮影系30L及び右撮影系30Rにより実質的に同時に取得された2つの画像の一方の画像にアーティファクトが含まれると判定されたとき、画像選択部81は、他方の画像を選択する。つまり、画像選択部81は、これら2つの画像のうち、アーティファクトが含まれると判定された画像ではない方の画像を選択する。
双方の画像にアーティファクトが含まれる場合、画像選択部81は、例えば、アーティファクトが観察や診断に与える悪影響を評価し、悪影響が小さい側の画像を選択することができる。この評価は、例えば、アーティファクトの大きさ及び/又は位置に基づき行われる。典型的には、含まれるアーティファクトが大きい画像は悪影響が大きいと評価され、スリット光照射領域などの注目領域やその近傍にアーティファクトが位置している画像は悪影響が大きいと評価される。
なお、双方の画像にアーティファクトが含まれる場合、第4実施形態で説明するアーティファクト除去を適用してもよい。
第2実施形態で説明したように、左撮影系30Lは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第1画像群を取得する。同様に、右撮影系30Rは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第2画像群を取得する。繰り返し撮影は典型的には動画撮影であり、第1画像群及び第2画像群のそれぞれは、動画像を構成するフレーム群である。また、前述したように、第1画像群及び第2画像群のうち実質的に同時に取得された画像同士がペアリングされている。
画像選択部81は、ペアリングされた2つの画像(第1画像群からの画像と第2画像群からの画像との組み合わせ)のうちの1つを選択する。これにより、例えば、複数の画像ペアのそれぞれから1つの画像が選択され、実質的にアーティファクトを含まない複数の画像が選択される。
データ処理部8Aは、3次元画像構築部82を更に含む。3次元画像構築部82は、画像選択部81により第1画像群及び第2画像群から選択された画像を含む画像群に基づいて3次元画像を構築する。この画像群は、画像選択部81により第1画像群及び第2画像群から選択された複数の画像のいずれかのみを含んでいてもよいし、これら以外の画像を更に含んでいてもよい。
なお、3次元画像は、3次元座標系によって画素の位置が定義された画像(画像データ)である。3次元画像の例として、スタックデータやボリュームデータがある。スタックデータは、複数の2次元画像をそれらの位置関係に応じて単一の3次元座標系に埋め込むことで構築される。ボリュームデータは、ボクセルデータとも呼ばれ、例えば、スタックデータにボクセル化を適用することで構築される。
3次元画像を構築する処理の例を説明する。3次元画像構築が適用される画像群は、図3に示す複数の前眼部画像(フレーム群)F1、F2、F3、・・・、FNであるとする。前眼部画像Fnにはスリット光照射領域Anが含まれている(n=1、2、・・・、N)。
3次元画像構築部82は、前眼部画像Fnを解析してスリット光照射領域Anを抽出する。スリット光照射領域Anの抽出は、画素に割り当てられた輝度情報を参照して行われ、典型的には閾値処理を含む。これにより、スリット光照射領域An(のみ)が描出されたスリット光照射領域画像Gnが得られる(n=1、2、・・・、N)。図8は、複数の前眼部画像F1~FNから構築された複数のスリット光照射領域画像G1~GNの例を示す。
スリット光照射領域画像Gnにアーティファクトが含まれている場合、例えば公知の画像処理又は他の実施形態に係る画像処理によって、スリット光照射領域画像Gnからアーティファクトを除去することができる。また、他の実施形態で説明する歪み補正を前眼部画像Fn又はスリット光照射領域画像Gnに適用することができる。
3次元画像構築部82は、複数のスリット光照射領域画像G1~GNの少なくとも一部に基づいて3次元画像を構築する。3次元画像やその構築の詳細については、他の実施形態で説明する。
本実施形態により奏される効果を説明する。
本実施形態では、例えば図5に示すように、左撮影光軸30Laと右撮影光軸30Raとが、照明光軸20aに対して互いに反対の方向に傾斜して配置されている。本実施形態のデータ処理部8Aは画像選択部81を含む。画像選択部81は、左撮影系30L及び右撮影系30Rにより実質的に同時に取得された2つの画像のいずれかにアーティファクトが含まれるか判定する。2つの画像のうちの一方の画像にアーティファクトが含まれると判定された場合、画像選択部81は、2つの画像のうちの他方の画像、つまりアーティファクトが含まれていない画像、を選択する。
このような構成によれば、観察や診断の妨げになるアーティファクト(正反射像など)を含まない画像を選択することが可能である。
更に、本実施形態のデータ処理部8Aは3次元画像構築部82を含む。3次元画像構築部82は、左撮影系30Lにより取得された複数の画像及び右撮影系30Rにより取得された複数の画像のうちから画像選択部81によって選択された画像を含む画像群に基づいて、被検眼Eの前眼部を表す3次元画像を構築する。
このような構成によれば、観察や診断の妨げになるアーティファクトを含まない画像群に基づいて、前眼部の3次元画像を構築することが可能である。
〈第4実施形態〉
本実施形態では、第1実施形態のスリットランプ顕微鏡1に適用可能な処理系の構成について説明する。
本実施形態では、第1実施形態のスリットランプ顕微鏡1に適用可能な処理系の構成について説明する。
本実施形態の撮影系3においては、第2実施形態で説明した図5のように、左撮影光軸30Laと右撮影光軸30Raとが照明光軸20aに対して互いに反対の方向に傾斜して配置されていてもよいし、或いは、2つの撮影光軸が照明光軸に対して同じ方向に配置されていてもよい。後者の場合、2つの撮影光軸のうちの一方の撮影光軸と照明光軸とがなす角度と、他方の撮影光軸と照明光軸とがなす角度とは、互いに異なる。また、いずれの場合においても、照明光軸に対する一方の撮影光軸の位置と、照明光軸に対する他方の撮影光軸の位置とは、互いに異なる。本実施形態の処理系は、次のようなアーティファクトに係る処理を実行する。
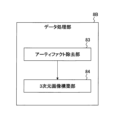
図9に示すデータ処理部8Bは、第1実施形態のデータ処理部8の例である。データ処理部8Bはアーティファクト除去部83を含む。
アーティファクト除去部83は、左撮影系30L及び右撮影系30Rにより実質的に同時に取得された2つの画像を比較することにより、これら2つの画像のいずれかにアーティファクトが含まれるか判定する。ここで、左撮影系30L及び右撮影系30Rにより実質的に同時に取得された2つの画像は、例えば、前述した画像のペアリングによって互いに対応付けられたものである。
前述したように、本実施形態では、照明光軸に対する一方の撮影光軸の位置と、照明光軸に対する他方の撮影光軸の位置とが、互いに異なっている。したがって、一方の撮影系(例えば左撮影系30L)により取得された画像におけるアーティファクトの位置と、他方の撮影系(例えば右撮影系30R)により取得された画像におけるアーティファクトの位置とが、互いに異なる。或いは、比較される2つの画像のうち一方の画像にのみアーティファクトが含まれる。
アーティファクト除去部83は、これら2つの画像のそれぞれを解析してアーティファクトを含むか判定する。アーティファクト判定は、例えば第3実施形態の画像選択部81と同じ要領で実行される。
2つの画像の一方にのみアーティファクトが含まれている場合、アーティファクト除去部83がこのアーティファクトを除去するか、或いは第3実施形態のようにアーティファクトが含まれない画像を選択することができる。なお、2つの画像の一方にアーティファクトが含まれ、且つ、他方にアーティファクトが含まれないと判定することは、2つの画像の比較に相当する。
2つの画像の双方にアーティファクトが含まれている場合、アーティファクト除去部83は、2つの画像の一方又は双方を処理してアーティファクトを除去する。
アーティファクト除去部83は、アーティファクトが除去された画像領域に、他の画像の部分領域を貼り付けることができる。前述したように、比較される2つの画像におけるアーティファクトの位置が異なるか、或いは、これら2つの画像の一方にしかアーティファクトは含まれないので、一方の画像からアーティファクトが除去された場合、他方の画像における対応領域はアーティファクトではない。アーティファクト除去部83は、この対応領域を他方の画像から抽出し、これをアーティファクトが除去された箇所に貼り付ける。
或いは、第2実施形態の動画撮影系40のように他の撮影系が設けられている場合、それにより取得された前眼部の画像における対応領域を抽出し、これをアーティファクトが除去された箇所に貼り付けることが可能である。
第2実施形態で説明したように、左撮影系30Lは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第1画像群を取得する。同様に、右撮影系30Rは、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第2画像群を取得する。繰り返し撮影は典型的には動画撮影であり、第1画像群及び第2画像群のそれぞれは、動画像を構成するフレーム群である。また、前述したように、第1画像群及び第2画像群のうち実質的に同時に取得された画像同士がペアリングされている。アーティファクト除去部83は、複数の画像ペアのそれぞれについて、上記のようなアライメント除去を適用する。
データ処理部8Bは、3次元画像構築部84を更に含む。3次元画像構築部84は、アーティファクト除去部83によりアーティファクトが除去された画像を含む画像群に基づいて3次元画像を構築する。この画像群は、アーティファクト除去部83により処理された複数の画像のいずれかのみを含んでいてもよいし、これら以外の画像を更に含んでいてもよい。3次元画像やその構築の詳細については、他の実施形態で説明する。
本実施形態により奏される効果を説明する。
本実施形態のデータ処理部8Bはアーティファクト除去部83を含む。アーティファクト除去部83は、左撮影系30L及び右撮影系30Rにより実質的に同時に取得された2つの画像を比較することにより、これら2つの画像のいずれかにアーティファクトが含まれるか判定する。いずれかの画像にアーティファクトが含まれると判定された場合、アーティファクト除去部83は、このアーティファクトの除去を実行する。
このような構成によれば、観察や診断の妨げになるアーティファクト(正反射像など)を含まない画像を構築することが可能である。
更に、本実施形態のデータ処理部8Bは3次元画像構築部84を含む。3次元画像構築部84は、アーティファクト除去部83によりアーティファクトが除去された画像を含む画像群に基づいて、被検眼Eの前眼部を表す3次元画像を構築する。
このような構成によれば、観察や診断の妨げになるアーティファクトを含まない画像群に基づいて、前眼部の3次元画像を構築することが可能である。
〈第5実施形態〉
本実施形態では、第1実施形態のスリットランプ顕微鏡1に適用可能な処理系の構成について説明する。第3実施形態及び第4実施形態では、典型的には、第1撮影系及び第2撮影系により実質的に同時に取得された2つの画像に対してアーティファクトに関する処理を適用し、アーティファクトを含まない画像群に基づいて3次元画像を構築している。一方、アーティファクトに関する処理を経ることなく3次元画像を構築することも可能である。本実施形態は、このような場合に適用可能である。
本実施形態では、第1実施形態のスリットランプ顕微鏡1に適用可能な処理系の構成について説明する。第3実施形態及び第4実施形態では、典型的には、第1撮影系及び第2撮影系により実質的に同時に取得された2つの画像に対してアーティファクトに関する処理を適用し、アーティファクトを含まない画像群に基づいて3次元画像を構築している。一方、アーティファクトに関する処理を経ることなく3次元画像を構築することも可能である。本実施形態は、このような場合に適用可能である。
図10に示すデータ処理部8Cは、第1実施形態のデータ処理部8の例である。データ処理部8Cは3次元画像構築部85を含む。
本実施形態の第1の例では、第1実施形態で説明したように、撮影系3が、移動機構6による照明系2及び撮影系3の移動と並行して繰り返し撮影を行うことにより、被検眼Eの前眼部の複数の画像を取得する。
3次元画像構築部85は、撮影系3により取得された複数の画像に基づいて3次元画像を構築することができる。3次元画像構築に用いられる画像群は、撮影系3により取得された複数の画像のいずれかのみを含んでいてもよいし、これら以外の画像を更に含んでいてもよい。3次元画像やその構築の詳細については、他の実施形態で説明する。
本実施形態の第2の例では、第2実施形態で説明したように、左撮影系30Lが、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第1画像群を取得する。同様に、右撮影系30Rが、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して繰り返し撮影を行うことにより第2画像群を取得する。第1画像群及び第2画像群のうち実質的に同時に取得された画像同士はペアリングされている。
3次元画像構築部85は、左撮影系30Lにより取得された第1画像群に基づいて3次元画像を構築することができる。この3次元画像の構築に用いられる画像群は、第1画像群のいずれかのみを含んでいてもよいし、これら以外の画像を更に含んでいてもよい。同様に、3次元画像構築部85は、右撮影系30Rにより取得された第2画像群に基づいて3次元画像を構築することができる。この3次元画像の構築に用いられる画像群は、第2画像群のいずれかのみを含んでいてもよいし、これら以外の画像を更に含んでいてもよい。3次元画像やその構築の詳細については、他の実施形態で説明する。
本実施形態により奏される効果を説明する。
本実施形態のデータ処理部8Cは3次元画像構築部85を含む。3次元画像構築部85は、撮影系3により取得された複数の画像に基づいて3次元画像を構築する。撮影系3は、左撮影系30L及び右撮影系30Rの双方を含んでいてもよいし、これらの一方に対応する単一の撮影系のみを含んでいてもよい。
このような構成によれば、被検眼Eの前眼部における3次元領域を表す3次元画像を構築することが可能である。3次元画像は観察や診断に有用である。
〈第6実施形態〉
本実施形態は、第3~第5実施形態のように前眼部の3次元画像を構築可能である場合に適用可能である。
本実施形態は、第3~第5実施形態のように前眼部の3次元画像を構築可能である場合に適用可能である。
前述したように、3次元画像は、スリット光のスキャンによって逐次に得られた複数の画像から構築される。複数の画像から3次元画像を構築するには複数の画像を配列する必要があるが、複数の画像は異なるタイミングで得られたものであるため、高い確度、高い精度で複数の画像を配列することは困難である。本実施形態は、このような問題を解決すべく考案されたものである。
図11に示す制御部7は第1実施形態のそれと同様である。移動機構6Aは、第1実施形態の移動機構6の例であり、平行移動機構61と回転機構62とを含む。データ処理部8Dは3次元画像構築部86を含む。3次元画像構築部86は、第3実施形態の3次元画像構築部82の例であり、第4実施形態の3次元画像構築部84の例であり、且つ、第5実施形態の3次元画像構築部85の例である。3次元画像構築部86は画像位置決定部87を含む。
第1実施形態の図1に示す構成が適用される場合、平行移動機構61は、スリット光で前眼部をスキャンするために、照明系2及び撮影系3を一体的にX方向に移動する。
第2実施形態の図5に示す構成が適用される場合、平行移動機構61は、スリット光で前眼部をスキャンするために、照明系20、左撮影系30L及び右撮影系30Rを一体的にX方向に移動する。
第1実施形態の図1に示す構成が適用される場合、回転機構62は、照明光軸2aを回転軸として照明系2及び撮影系3を一体的に回転する。
第2実施形態の図5に示す構成が適用される場合、回転機構62は、照明光軸20aを回転軸として照明系20、左撮影系30L及び右撮影系30Rを一体的に回転する。
これにより、被検眼Eの前眼部に照射されるスリット光の向きを回転することができ、且つ、スリット光の向きの回転と同じ角度だけ撮影方向も回転する。
第1実施形態の図1に示す構成が適用される場合、照明系2及び撮影系3が第1回転位置に配置されているときにスリット光による前眼部スキャンが実行されて撮影系3により複数の画像が取得される。
第2実施形態の図5に示す構成が適用される場合、照明系20、左撮影系30L及び右撮影系30Rが第1回転位置に配置されているときにスリット光による前眼部スキャンが実行され、左撮影系30Lにより第1画像群が取得され、且つ、右撮影系30Rにより第2画像群が取得される。
第1回転位置は、例えば、前眼部に投射されるスリット光の長手方向が被検者の体軸方向(Y方向)に一致するような回転位置である。
第1実施形態の図1に示す構成が適用される場合、第1回転位置と異なる第2回転位置に照明系2及び撮影系3が配置されているときに、撮影系3は、照明系20によりスリット光が照射されている前眼部の画像を取得する。
第2実施形態の図5に示す構成が適用される場合、第1回転位置と異なる第2回転位置に照明系20、左撮影系30L及び右撮影系30Rが配置されているときに、左撮影系30L及び右撮影系30Rのそれぞれは、照明系20によりスリット光が照射されている前眼部の画像を取得する。
第2回転位置は、例えば、前眼部に投射されるスリット光の長手方向が左右方向(X方向)に一致するような回転位置である。これにより、第1回転位置にて行われる前眼部スキャンとは別に、1回以上の撮影が行われる。この付加的な撮影において、スリット光の向きは、前眼部スキャン時のそれと異なる。典型的には、前眼部スキャンにおける全てのスリット光照射領域を通過するように、スリット光の向きを設定することができる。
画像位置決定部87は、第2回転位置において取得された前眼部の画像に基づいて、第1回転位置において取得された前眼部の複数の画像の相対位置を決定する。この画像位置決定は、第2回転位置にて得られた画像を参照して、第1回転位置にて得られた複数の画像の配列を調整するものである。
画像位置決定部87は、例えば、第1回転位置にて得られた各画像と、第2回転位置にて得られた画像とを解析して両者の共通領域を特定する。更に、画像位置決定部87は、特定された共通領域を基準として、第1回転位置にて得られた各画像と、第2回転位置にて得られた画像との相対位置を決定する。
第1回転位置にて得られた全ての画像に対してこのような処理を適用することにより、第2回転位置にて得られた画像を基準として、第1回転位置にて得られた全ての画像が配列される。すなわち、第2回転位置にて得られた画像を媒介して、第1回転位置にて得られた全ての画像の相対位置が決定される。
画像位置決定部87が実行する処理は、例えば、画像相関処理、セグメンテーション、パターンマッチング、人工知能を利用した処理、コグニティブ・コンピューティングを利用した処理など、任意の情報処理を含んでいてよい。
3次元画像構築部86は、画像位置決定部87により決定された相対位置に基づいて、第1回転位置にて得られた複数の画像を単一の3次元座標系に配列し、3次元画像を形成する。
図12は、本実施形態におけるスリット光の照射位置の例を示す。図12は、前眼部を正面から見た状態を表している。照明系2及び撮影系3が第1回転位置に配置されているとき、前眼部スキャンにおける複数のスリット光照射領域は、Y方向を長手方向とし且つX方向に配列された複数のストリップ状領域に相当する。本例の前眼部スキャンでは、これらストリップ状領域に対し、矢印11により示された順序で、順次にスリット光が照射される。各ストリップ状領域にスリット光が照射されているときに、少なくとも1回の撮影が行われる。
一方、符号12は、照明系2及び撮影系3が第2回転位置に配置されているときに前眼部に照射されるスリット光の位置を示す。第2回転位置に対応するスリット光照射領域12は、X方向を長手方向とするストリップ状領域である。つまり、本例では、第1回転位置にて前眼部に照射されるスリット光の向きと、第2回転位置にて前眼部に照射されるスリット光の向きとが互いに直交している。なお、第1回転位置にて前眼部に照射されるスリット光の向きと、第2回転位置にて前眼部に照射されるスリット光の向きとの関係は、これに限定されず、双方の向きが異なっていれば十分である。
ここでは、照明系2及び撮影系3が適用される場合について説明したが、照明系20、左撮影系30L及び右撮影系30Rが適用される場合などにおいても同様である。
本例では、第1回転位置での前眼部スキャンと、第2回転位置での撮影との双方が実行されるが、これらを実施するタイミングは任意であってよい。例えば、第2回転位置での撮影を行った後に第1回転位置での前眼部スキャンを行うことや、第1回転位置での前眼部スキャンの後に第2回転位置での撮影を行うことや、第1回転位置での前眼部スキャンの途中段階で第2回転位置での撮影を行うことが可能である。
本実施形態により奏される効果を説明する。
本実施形態の移動機構6Aは、照明光軸2a(20a)を回転軸として照明系2(20)及び撮影系3(30L、30R)を一体的に回転する回転機構62を含む。照明系2(20)及び撮影系3(30L、30R)が第1回転位置に配置されているときに、撮影系3(30L、30R)は、スリット光が照射されている前眼部の複数の画像を取得する。更に、第1回転位置と異なる第2回転位置に照明系2(20)及び撮影系3(30L、30R)が配置されているときに、撮影系3(30L、30R)は、照明系2(20)によりスリット光が照射されている前眼部の画像を取得する。画像位置決定部87は、第2回転位置において取得された画像に基づいて、第1回転位置において取得された複数の画像の相対位置を決定する。3次元画像構築部86は、決定された相対位置に基づき複数の画像の間の位置合わせを行って3次元画像を構築する。
このような構成によれば、第1回転位置において取得された複数の画像の間の位置合わせを、第2回転位置において取得された画像を参照して行うことができるので、3次元画像構築の確度や精度の向上を図ることが可能である。
なお、「第1回転位置において取得された複数の画像の相対位置を決定する」は、当該複数の画像自体の相対位置を決定することだけでなく、当該複数の画像からそれぞれ抽出された複数のスリット光照射領域の相対位置を決定することも含む。よって、本実施形態は、当該複数の画像の相対位置を決定した後にスリット光照射領域を抽出する場合と、当該複数の画像からスリット光照射領域を抽出した後にそれらの相対位置を決定する場合との双方を含む。
また、本実施形態は、第3実施形態が適用される場合のように、第1回転位置において取得された複数の画像から選択された画像群の相対位置を決定することを含む。更に、本実施形態は、第4実施形態が適用される場合のように、第1回転位置において取得された複数の画像を加工して得られた画像群の相対位置を決定することを含む。よって、本実施形態は、当該複数の画像の相対位置を決定した後に画像の選択又は加工を行う場合と、画像の選択又は加工を行った後に選択画像又は加工画像の相対位置を決定する場合との双方を含む。
〈第7実施形態〉
本実施形態では、第3~第6実施形態などにおいて説明した3次元画像構築について説明する。
本実施形態では、第3~第6実施形態などにおいて説明した3次元画像構築について説明する。
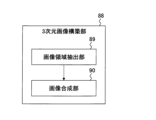
図13に示す3次元画像構築部88は、画像領域抽出部89と、画像合成部90とを含む。
第1実施形態の図1に示す構成が適用される場合、画像領域抽出部89は、照明系2及び撮影系3の移動と並行して撮影系3により取得された複数の画像のそれぞれから、照明系2からのスリット光の照射領域に対応する画像領域を抽出する。抽出される画像領域は、2次元画像領域又は3次元画像領域である。
第2実施形態の図5に示す構成が適用される場合、画像領域抽出部89は、照明系20、左撮影系30L及び右撮影系30Rの移動と並行して左撮影系30Lにより取得された複数の画像のそれぞれから、照明系20からのスリット光の照射領域に対応する画像領域を抽出することができる。また、画像領域抽出部89は、照明系20、左撮影系30L及び右撮影系30Rの移動と並行して右撮影系30Rにより取得された複数の画像のそれぞれから、照明系20からのスリット光の照射領域に対応する画像領域を抽出することができる。本例においても、抽出される画像領域は、2次元画像領域又は3次元画像領域である。
画像領域抽出部89が実行する処理は、例えば、第3実施形態において図3及び図8を参照しつつ説明した、前眼部画像Fnからスリット光照射領域Anを抽出してスリット光照射領域画像Gnを構築する処理と同じ要領で実行される。
画像合成部90は、画像領域抽出部89により複数の画像からそれぞれ抽出された複数の画像領域(複数のスリット光照射領域)を合成して3次元画像を構築する。画像合成部90は、例えば、複数のスリット光照射領域を単一の3次元座標系に埋め込む処理を含み、埋め込まれた複数のスリット光照射領域を加工する処理を更に含んでもよい。複数のスリット光照射領域の加工としては、例えば、ノイズ除去、ノイズ低減、ボクセル化などを実行することが可能である。
複数のスリット光照射領域を合成する前に、第6実施形態に係る処理を適用して複数のスリット光照射領域の相対位置を決定してもよい。
画像領域抽出部89は、複数の画像のそれぞれから、スリット光照射領域及び前眼部の所定部位の双方に対応する画像領域を抽出するように構成されていてよい。前眼部の所定領域は、例えば、角膜前面及び水晶体後面により画成される部位であってよい。
例えば、画像領域抽出部89は、まず、輝度情報の閾値処理によってスリット光照射領域を特定し、且つ、セグメンテーションによって角膜前面に相当する画像領域と水晶体後面に相当する画像領域とを特定する。
次に、画像領域抽出部89は、角膜前面に相当する画像領域と水晶体後面に相当する画像領域とに基づき、角膜前面及び水晶体後面により画成される部位に対応する画像領域(対象画像領域)を特定する。
続いて、画像領域抽出部89は、スリット光照射領域と対象画像領域との間の共通領域、つまりスリット光照射領域及び対象画像領域の双方に含まれる画像領域、を特定する。これにより、例えば、角膜前面から水晶体後面までの範囲においてスリット光照射領域に相当する、対象画像中の2次元画像領域(断面)又は3次元画像領域(スライス)が特定される。
本例では、スリット光照射領域の抽出の後に画像合成を行っているが、この逆に、画像合成の後にスリット光照射領域の抽出を行ってもよい。また、抽出される画像領域はスリット光照射領域に限定されず、所定領域は角膜前面から水晶体後面までの部位に限定されない。
このような構成によれば、スリット光を用いた前眼部スキャンで得られた複数の画像から、前眼部の所望の部位の3次元画像を取得することができる。特に、スリットランプ顕微鏡検査での主要な観察対象であるスリット光照射領域を表す3次元画像を構築することができ、更に、前眼部の主要な観察対象である角膜前面から水晶体後面までの部位を表す3次元画像を構築することができる。
〈第8実施形態〉
本実施形態では、第3~第7実施形態などにおいて構築された3次元画像のレンダリングについて説明する。
本実施形態では、第3~第7実施形態などにおいて構築された3次元画像のレンダリングについて説明する。
図14に示すデータ処理部8Eは、3次元画像構築部91と、レンダリング部92とを含む。3次元画像構築部91は、例えば、第3実施形態の3次元画像構築部82、第4実施形態の3次元画像構築部84、第5実施形態の3次元画像構築部85、第6実施形態の3次元画像構築部86、及び、第7実施形態の3次元画像構築部88のいずれかであってよい。
レンダリング部92は、3次元画像構築部91により構築された3次元画像をレンダリングすることで新たな画像(レンダリング画像)を構築する。
レンダリングは任意の処理であってよく、例えば3次元コンピュータグラフィクスを含む。3次元コンピュータグラフィクスは、3次元座標系により定義された3次元空間内の仮想的な立体物(スタックデータ、ボリュームデータなどの3次元画像)を2次元情報に変換することにより立体感のある画像を作成する演算手法である。
レンダリングの例として、ボリュームレンダリング、最大値投影(MIP)、最小値投影(MinIP)、サーフェスレンダリング、多断面再構成(MPR)、プロジェクション画像構築、シャドウグラム構築などがある。レンダリングの更なる例として、スリットランプ顕微鏡で得られた断面画像の再現、シャインプルーフ画像の形成などがある。また、レンダリング部92は、このようなレンダリングとともに適用される任意の処理を実行可能であってよい。
レンダリング部92は、前眼部の3次元画像において所定の部位に相当する領域を特定することができる。例えば、レンダリング部92は、角膜前面に相当する領域、角膜後面に相当する領域、水晶体前面に相当する領域、水晶体後面に相当する領域などを特定することができる。このような画像領域特定には、例えば、セグメンテーション、エッジ検出、閾値処理など、公知の画像処理が適用される。
なお、3次元画像は、典型的にはスタックデータ又はボリュームデータである。3次元画像に対する断面の指定は、手動又は自動で行われる。
3次元画像の断面を手動で指定する場合、レンダリング部92は、3次元画像をレンダリングして、手動断面指定のための表示画像を構築する。表示画像は、典型的には観察対象となる部位の全体を表す画像であり、例えば、角膜前面から水晶体後面までの部位を表す。表示画像を構築するためのレンダリングは、典型的には、ボリュームレンダリング又はサーフェスレンダリングである。
制御部7は、レンダリング部92により構築された表示画像を、図示しない表示デバイスに表示させる。ユーザーは、ポインティングデバイスなどの操作デバイスを用いて、表示画像に対して所望の断面を指定する。表示画像に指定された断面の位置情報がレンダリング部92に入力される。
表示画像は3次元画像のレンダリング画像であるから、表示画像と3次元画像との間には自明な位置の対応関係がある。この対応関係に基づき、レンダリング部92は、表示画像に指定された断面の位置に対応する、3次元画像における断面の位置を特定する。つまり、レンダリング部92は、3次元画像に対して断面を指定する。
更に、レンダリング部92は、3次元画像を当該断面で切断して3次元部分画像を構築することができる。レンダリング部92は、この3次元部分画像をレンダリングして表示用の画像を構築することができる。このようなレンダリングの例、3次元部分画像の例、3次元部分画像に基づく表示用画像の例などについては、後述する。
3次元画像の断面を自動で指定する場合、例えば、データ処理部8E(例えばレンダリング部92)は、3次元画像を解析して、前眼部の所定部位に相当する位置又は領域を特定することができる。例えば、角膜前面を特定することや、角膜前面の頂点位置を特定することや、水晶体後面を特定することや、水晶体後面の頂点位置を特定することが可能である。
また、データ処理部8E(例えばレンダリング部92)は、3次元画像にセグメンテーションを適用して、所定部位に相当する画像領域を特定することができる。例えば、角膜前面に相当する2次元領域、角膜に相当する3次元領域、水晶体に相当する3次元領域、水晶体後面に相当する3次元領域、前房に相当する3次元領域などを特定することが可能である。
データ処理部8E(例えばレンダリング部92)は、このようにして特定された位置や領域に基づいて、3次元画像に対して断面を指定することができる。例えば、角膜前面の頂点位置と水晶体後面の頂点位置とを通過する平面を断面として指定することや、水晶体前面に相当する曲面を断面として指定することが可能である。
3次元画像に対して断面が指定されたときにレンダリング部92が構築できる画像は3次元部分画像に限定されない。例えば、3次元画像に対して断面が指定されたとき、レンダリング部92は、当該断面を表す2次元断面画像を構築することができる。このようなレンダリングの例、2次元断面画像の例、2次元断面画像に基づく表示用画像の例などについては、後述する。
3次元画像に対して指定可能な位置情報は、平面状又は曲面状の2次元領域である断面に限定されない。3次元領域に指定可能な位置情報の他の例として、スライスがある。スライスは、所定の厚みを有する3次元領域であり、典型的には、一様な厚みを有する薄片である。
3次元画像に対してスライスが指定されたとき、レンダリング部92は、当該スライスに対応する3次元スライス画像を構築することができる。レンダリング部92は、この3次元スライス画像をレンダリングして表示用の画像を構築することができる。このようなレンダリングの例、3次元スライス画像の例、3次元スライス画像に基づく表示用画像の例などについては、後述する。
本実施形態により奏される効果を説明する。
本実施形態は、3次元画像構築部91により構築された3次元画像をレンダリングしてレンダリング画像を構築するレンダリング部92を含む。これにより、3次元画像構築部91により構築された3次元画像に基づくレンダリング画像を表示することができ、前眼部の所望の部位を観察することが可能になる。
レンダリングの手法は任意である。例えば、3次元画像に対して断面が指定されたとき、レンダリング部92は、この断面で3次元画像を切断して3次元部分画像を構築することができる。これにより、前眼部の所望の断面を観察できるとともに、前眼部の3次元形態を把握することも可能である。
他の例において、3次元画像に対して断面が指定されたとき、レンダリング部92は、当該断面を表す2次元断面画像を構築することができる。これにより、前眼部の所望の断面を観察することが可能である。
更に他の例において、3次元画像に対してスライスが指定されたとき、レンダリング部92は、当該スライスに対応する3次元スライス画像を構築することができる。これにより、前眼部の所望のスライスを観察することが可能である。
〈第9実施形態〉
第1~第8実施形態に係るスリットランプ顕微鏡では、照明光軸と撮影光軸とが所定の角度をなしており、照明系及び撮影系はシャインプルーフカメラとして機能する。このようなスリットランプ顕微鏡により得られる画像は歪みを伴う。この歪みは、典型的には台形歪みである。
第1~第8実施形態に係るスリットランプ顕微鏡では、照明光軸と撮影光軸とが所定の角度をなしており、照明系及び撮影系はシャインプルーフカメラとして機能する。このようなスリットランプ顕微鏡により得られる画像は歪みを伴う。この歪みは、典型的には台形歪みである。
本実施形態では歪み補正について説明する。この歪み補正は、典型的には台形補正(キーストーン補正)である。台形補正は周知技術であり、例えば特開2017-163465号公報(米国特許出願公開第2017/0262163号明細書)に開示されている。
前述したように、前眼部において(つまり実空間において)、スリット光照射領域はZ方向に広がりを有し、スリット幅を無視すると、典型的にはYZ平面において定義される。一方、撮影系の光軸は、スリット光を照射する照明系の光軸に対してX方向に傾斜している。したがって、前眼部の撮影対象領域は、被検眼の表面に近づくほど大きく描出され、眼底に近づくほど小さく描出される。したがって、(少なくとも)Z方向における台形歪みが生じる。
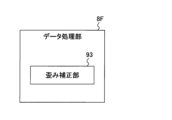
図15に示すデータ処理部8Fは歪み補正部93を含む。歪み補正部93は、第1~第8実施形態のいずれにも組み合わせ可能である。歪み補正部93は、撮影系3(左撮影系30L、右撮影系30R)により取得された前眼部画像に対して歪み補正を適用する。
より具体的には、歪み補正部93は、照明光軸2a(20a)と撮影光軸3a(30La、30Ra)とがなす角度である光軸角度θ(θL、θR)に起因する歪みを補正するための処理(台形補正)を、照明系2(20)及び撮影系3(30L、30R)の移動と並行して撮影系3(30L、30R)により取得された複数の画像のうちの少なくとも1つに適用する。
歪み補正が適用される画像は、撮影系3(30L、30R)により取得された前眼部画像自体には限定されず、撮影系3(30L、30R)により取得された前眼部画像から抽出されたスリット光照射領域などであってもよい。よって、前眼部画像の歪みを補正した後にスリット光照射領域を抽出してもよいし、逆に、前眼部画像からスリット光照射領域を抽出した後に、このスリット光照射領域の歪みを補正してもよい。
また、第3実施形態や第4実施形態における「画像群」のように、撮影系3(30L、30R)により取得された前眼部画像のうちから選択された前眼部画像の歪みを補正することや、撮影系3(30L、30R)により取得された前眼部画像を加工して得られた画像の歪みを補正することも含む。よって、前眼部画像の歪みを補正した後に前眼部画像の選択・加工を行ってもよいし、前眼部画像の選択又は加工を行った後に選択画像又は加工画像の歪みを補正してもよい。
典型的な実施形態において、スリットランプ顕微鏡は、図1又は図5に示す光学系を備え、歪み補正部93によってYZ平面における歪みが補正される。
図1に示す例において、撮影光軸3aは、照明光軸2aに対して、照明光軸2aに沿う第1方向(Z方向)及びスリット光の長手方向に沿う第2方向(Y方向)の双方に直交する第3方向(X方向)に傾斜して配置されている。ここで、照明光軸2aと撮影光軸3aとがなす光軸角度は、図1に示す角度θである。歪み補正部93は、第1方向(Z方向)及び第2方向(Y方向)の双方を含む平面(YZ平面)における歪みを補正するための処理を、撮影系3により取得された前眼部画像に適用することができる。
図5に示す例において、左撮影光軸30Laは、照明光軸20aに対して、照明光軸20aに沿う第1方向(Z方向)及びスリット光の長手方向に沿う第2方向(Y方向)の双方に直交する第3方向(X方向)に傾斜して配置されている。ここで、照明光軸20aと左撮影光軸30Laとがなす光軸角度は、図5に示す角度θLである。歪み補正部93は、第1方向(Z方向)及び第2方向(Y方向)の双方を含む平面(YZ平面)における歪みを補正するための処理を、左撮影光軸30Laにより取得された前眼部画像に適用することができる。
同様に、右撮影光軸30Raは、照明光軸20aに対して、照明光軸20aに沿う第1方向(Z方向)及びスリット光の長手方向に沿う第2方向(Y方向)の双方に直交する第3方向(X方向)に傾斜して配置されている。ここで、照明光軸20aと右撮影光軸30Raとがなす光軸角度は、図5に示す角度θRである。歪み補正部93は、第1方向(Z方向)及び第2方向(Y方向)の双方を含む平面(YZ平面)における歪みを補正するための処理を、右撮影光軸30Raにより取得された前眼部画像に適用することができる。
一般的な台形補正は、矩形を歪ませて台形化した形状を元の矩形に戻すように行われる。本実施形態では、このような標準的な台形補正を適用することも可能であるが、以下に説明するように、他の台形補正を適用することが有効な場合もある。
一般に、スリットランプ顕微鏡を用いて前眼部の光切片(つまりスリット光照射領域)を観察する際には、照明系の光軸(照明光軸)に対して観察系の光軸(観察光軸)が傾斜される。よって、ユーザーは、Z方向に延びる光切片を斜めから観察する。このとき、照明光軸と観察光軸とがなす角度(観察角度)は、典型的には既定の値である(例えば、17.5度、30度、又は45度)。この既定値を基準角度(α)と呼ぶ。
基準角度αと光軸角度β(θ、θL、θR)とに基づいて、歪み補正(台形補正)の補正係数を設定することができる。少なくとも1つの基準角度αと、少なくとも1つの光軸角度β(θ、θL、θR)とについて、補正係数が設定される。2つ以上の基準角度と1つの光軸角度との組み合わせのそれぞれについて補正係数を設定することや、1つの基準角度と2つ以上の光軸角度との組み合わせのそれぞれについて補正係数を設定することや、2つ以上の基準角度と2つ以上の光軸角度との組み合わせのそれぞれについて補正係数を設定することも可能である。一般に、基準角度α及び光軸角度βの一方又は双方を変数とする離散的又は連続的な補正係数C(α、β)を設定することが可能である。
このようにして設定された1以上の補正係数C(α、β)は歪み補正部93に格納される。歪み補正部93は、補正係数C(α、β)に基づいて歪みを補正するための処理を実行することができる。
補正係数C(α、β)が複数の値を提供する場合、歪み補正部93又はユーザーは、基準角度α及び光軸角度βの一方又は双方を指定する。歪み補正部93は、この指定の結果に応じた補正係数を適用する。このような構成は、例えば、光軸角度βが可変なスリットランプ顕微鏡が適用される場合に適用され、光軸角度ベータの可変範囲における複数の補正係数を示すテーブルやグラフが準備される。
補正係数を示す情報を準備する代わりに、次の構成を適用することが可能である。すなわち、本例の歪み補正部は、補正係数を算出するための所定の演算式を予め記憶する。更に、本例の歪み補正部は、基準角度α及び/又は光軸角度βの入力を受け、この入力値を演算式に代入して補正係数を算出する。本例の歪み補正部は、算出された補正係数を用いて歪み補正を実行する。
本実施形態により奏される効果を説明する。
本実施形態は、歪み補正部93を含む。図1に示す構成において、歪み補正部93は、移動機構6による照明系2及び撮影系3の移動と並行して撮影系3が繰り返し撮影を行うことにより取得した複数の画像のうちの少なくとも1つに対し、照明系2の光軸2aと撮影系3の光軸3aとがなす角度である光軸角度θに起因する歪みを補正するための処理を適用することができる。なお、図5に示す構成や他の構成が採用される場合においても同様である。
このような構成によれば、光軸角度θに起因する歪みが補正された好適な画像を提供することが可能になる。
図1に示す構成において、撮影系3に含まれる光学系4の光軸3aは、照明系2の光軸2aに対して、照明系2の光軸2aに沿う第1方向(Z方向)及びスリット光の長手方向に沿う第2方向(Y方向)の双方に直交する第3方向(X方向)に傾斜して配置されている。歪み補正部93は、第1方向及び第2方向の双方を含む平面(YZ平面)における歪みを補正するための処理を実行することができる。図5に示す構成や他の構成が採用される場合においても同様である。
このような構成によれば、第1方向及び第2方向の双方を含む平面に台形歪みが発生すが、これを補正することが可能である。
図1に示す構成において、歪み補正部93は、所定の基準角度αと光軸角度θとに基づき設定された補正係数Cを予め記憶している。歪み補正部93は、この補正係数Cに基づいて、光軸角度θに起因する歪みを補正するための処理を画像に適用することができる。図5に示す構成や他の構成が採用される場合においても同様である。
〈第10実施形態〉
スリットランプ顕微鏡検査において、組織のサイズや形状、組織間の位置関係などを参照することがある。本実施形態では、そのための計測について説明する。
スリットランプ顕微鏡検査において、組織のサイズや形状、組織間の位置関係などを参照することがある。本実施形態では、そのための計測について説明する。
図16に示すデータ処理部8Gは計測部94を含む。計測部94は、第1~第9実施形態のいずれかに組み合わせ可能である。
第1~第9実施形態に係るスリットランプ顕微鏡に計測部94を組み合わせた場合、計測部94は、スリット光を用いた前眼部スキャンにより取得された前眼部画像を解析することで、所定の計測値を求めることができる。
3次元画像を構築可能なスリットランプ顕微鏡に計測部94を組み合わせた場合、計測部94は、3次元画像構築部82(84、85、86、88、91)により構築された3次元画像を解析することにより、所定の計測値を求めることができる。
計測は、例えば、組織の形態を示すパラメータ(厚み、径、面積、体積、角度、形状など)、組織間の関係を示すパラメータ(距離、方向など)に関して実行される。計測のための解析は、例えば、組織又はその輪郭を特定するためのセグメンテーションを含む。
このような本実施形態によれば、前眼部の観察や診断に有効なパラメータについて計測を行うことが可能である。
歪み補正を実行可能な第9実施形態に計測部94を組み合わせることで、歪み補正が適用された画像に基づき計測を行うことができる。これにより、計測確度の向上や計測精度の向上を図ることが可能となる。
〈第11実施形態〉
第2実施形態の動画撮影系40のように、スリット光を用いた前眼部スキャンと並行して前眼部を固定位置から動画撮影する機能をスリットランプ顕微鏡が備える場合、本実施形態に係る機能を更に付加することができる。
第2実施形態の動画撮影系40のように、スリット光を用いた前眼部スキャンと並行して前眼部を固定位置から動画撮影する機能をスリットランプ顕微鏡が備える場合、本実施形態に係る機能を更に付加することができる。
本実施形態の制御部7Aは移動制御部71を含み、データ処理部8Hは運動検出部95を含む。また、本実施形態は、動画撮影系40を含む。動画撮影系40は、スリット光を用いた前眼部スキャンと並行して前眼部を固定位置から動画撮影する。
運動検出部95は、動画撮影系40により取得される動画像を解析して被検眼Eの運動を検出する。この運動検出は、動画撮影系40と並行して実行される。
例えば、運動検出部95は、まず、動画撮影系40から逐次に入力されるフレームを解析して所定部位に相当する画像領域を特定する。所定部位は、典型的には、瞳孔の中心、重心、輪郭などであってよい。画像領域特定は、画素に割り当てられた輝度情報に基づき行われる。運動検出部95は、前眼部の画像における低輝度の画像領域を瞳孔領域として特定し、この瞳孔領域の重心又は輪郭を特定することができる。或いは、運動検出部95は、瞳孔領域の近似円又は近似楕円を求め、その中心又は輪郭を特定することが可能である。
このように、運動検出部95は、動画撮影系40から入力されるフレーム中の特徴点を逐次に求める。更に、運動検出部95は、逐次に特定される特徴点の位置の時間変化を求める。動画撮影系40は固定配置されているので、このような処理により運動検出部95は被検眼Eの運動を(リアルタイムで)検出することが可能である。
移動制御部71は、運動検出部95からの出力に基づいて移動機構6を制御することができる。より具体的に説明すると、運動検出部95は、動画撮影系40から逐次に入力されるフレーム中の特徴点の位置の時間変化を示す情報を、移動制御部71に逐次に入力する。移動制御部71は、運動検出部95から逐次に入力される情報にしたがって移動機構6を制御する。この移動制御は、被検眼Eの運動に起因するアライメント状態の変化を打ち消すように実行される。このような動作はトラッキングを呼ばれる。
このような本実施形態によれば、スリット光を用いた前眼部スキャン中に被検眼Eが動いたとき、この動きに応じてアライメント状態が自動で補正される。これにより、被検眼の運動の影響を受けることなく、スリット光を用いた前眼部スキャンを行うことが可能である。
〈使用形態〉
実施形態に係るスリットランプ顕微鏡の例示的な使用形態を説明する。ここでは、図5に示す光学系が適用される。テーブル、イス、顎受け台の調整、撮影開始の指示、アライメントなどは、前述した要領で行われる。
実施形態に係るスリットランプ顕微鏡の例示的な使用形態を説明する。ここでは、図5に示す光学系が適用される。テーブル、イス、顎受け台の調整、撮影開始の指示、アライメントなどは、前述した要領で行われる。
まず、第6実施形態で説明したように、前眼部に照射されるスリット光の長手方向が左右方向(X方向)に一致するように、制御部7が回転機構62を制御する。左撮影系30L又は右撮影系30Rは、当該向きのスリット光が照射されている前眼部を撮影する。
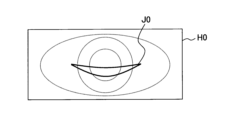
これにより、図18に示す前眼部画像H0が取得される。前眼部画像H0には、左右方向(X方向)を長手方向とするスリット光が照射されている領域であるスリット光照射領域J0が含まれている。
なお、左撮影系30L及び右撮影系30Rの双方が前眼部を撮影してもよい。この場合、スリット光照射領域を斜め上方から撮影した画像と、斜め下方から撮影した画像とが得られる。
次に、前眼部に照射されるスリット光の長手方向が上下方向(Y方向)に一致するように、制御部7が回転機構62を制御する。制御部7は、スリット光を用いた前眼部スキャンを実行するように、照明系20、左撮影系30L、右撮影系30R、及び移動機構6を制御する。すなわち、左撮影系30L及び右撮影系30Rのそれぞれが、移動機構6による照明系20、左撮影系30L及び右撮影系30Rの移動と並行して、被検眼Eの前眼部を繰り返し撮影する。
これにより、左撮影系30Lは、図19Aに示すN枚の前眼部画像HL1~HLNを含む第1画像群を取得し、右撮影系30Rは、図19Bに示すN枚の前眼部画像HR1~HRNを含む第2画像群を取得する。左撮影系30Lにより取得された前眼部画像HLnには、斜め左方から撮影されたスリット光照射領域JLnが描出されている(n=1、2、・・・、N)。右撮影系30Rにより取得された前眼部画像HRnには、斜め右方から撮影されたスリット光照射領域JRnが描出されている(n=1、2、・・・、N)。
ここで、前述した画像ペアリングにより、前眼部画像HLnと前眼部画像HRnとが互いに対応付けられているものとする(n=1、2、・・・、N)。実際の前眼部スキャンでは、後に構築される3次元画像の解像度を考慮し、左右それぞれの前眼部画像の枚数Nは200以上に設定される。なお、枚数Nは任意である。
図20は、実際に行われた前眼部スキャンで取得された前眼部画像を示す。これら前眼部画像のそれぞれには、高輝度で提示されたスリット光照射領域が含まれている。
続いて、第7実施形態(図13)の画像領域抽出部89が、前眼部画像HLnからスリット光照射領域JLnを抽出し、且つ、前眼部画像HRnからスリット光照射領域JRnを抽出する。図21Aは、複数の前眼部画像HL1~HLNからそれぞれ構築された複数のスリット光照射領域画像KL1~KLNを示す。図21Bは、複数の前眼部画像HR1~HRNからそれぞれ構築された複数のスリット光照射領域画像KR1~KRNを示す。
次に、第3実施形態又は第4実施形態に係る処理を、スリット光照射領域画像KLn及びスリット光照射領域画像KRnに適用することで、アーティファクトを含まない複数のスリット光照射領域画像が得られる。図22に例示する複数のスリット光照射領域画像K1~KNは、いずれもアーティファクトを含まない。スリット光照射領域画像K1~KNは、それぞれ、スリット光照射領域J1~JNを含む。
続いて、スリット光照射領域画像K1~KNのそれぞれに対し、第9実施形態で説明した歪み補正(台形補正)を適用する。これにより、アーティファクトを含まず、且つ、歪みが補正された、複数のスリット光照射領域画像が得られる。図23に例示する複数のスリット光照射領域画像P1~PNは、いずれもアーティファクトを含まない。更に、スリット光照射領域画像P1~PNは、それぞれ、スリット光照射領域Q1~QNを含む。
次に、第6実施形態の画像位置決定部87が、図18に示す前眼部画像H0に基づいて、複数のスリット光照射領域画像P1~PNの相対位置を決定する。例えば、画像位置決定部87は、前眼部画像H0に描出された角膜前面に相当する画像領域(スリット光照射領域J0における曲率半径が小さい方のカーブ)に基づいて、スリット光照射領域画像P1~PNを配列する。これにより、角膜前面のカーブに合わせてスリット光照射領域画像P1~PNが配列される。
第6実施形態の3次元画像構築部86は、角膜前面のカーブに合わせて配列された複数のスリット光照射領域画像P1~PNに基づいて3次元画像を構築する。この3次元画像は、アーティファクトを含まず、且つ、その歪みが補正されている。
続いて、データ処理部8は、前眼部スキャン時に前眼部に投影されたスリット光の長さ(Y方向の寸法)と、移動機構6によるスリット光の移動距離(X方向の寸法)とに基づいて、3次元画像の縦横比を補正する。これにより、3次元画像のX方向の寸法とY方向の寸法との比率が補正される。
次に、第10実施形態の計測部94が、3次元画像を解析して所定の計測値を求める。計測パラメータの例として、角膜前面曲率、角膜前面曲率半径、角膜後面曲率、角膜後面曲率半径、角膜径、角膜厚、角膜トポグラフィ、前房深度、隅角、水晶体前面曲率、水晶体前面曲率半径、水晶体後面曲率、水晶体後面曲率半径、水晶体厚などがある。
図24は、実際に取得された3次元画像をボリュームレンダリングして得られた表示画像R0を示す。レンダリングは、第8実施形態のレンダリング部92により実行される。制御部7は、表示画像R0を図示しない表示デバイスに表示させる。表示画像R0は、角膜前面及び水晶体後面により画成された部位を描出している。
ユーザーは、表示デバイスに表示された表示画像R0を観察し、図示しない操作デバイスを用いて所望の断面を指定することができる。図25に示す点線は、ユーザーが表示画像R0に対して指定した断面の位置を示す。
レンダリング部92は、ユーザーにより指定された断面で3次元画像を切断することにより3次元部分画像を構築することができる。図26に示す画像R1は、図25に示す断面で3次元画像を切断して得られた3次元部分画像をレンダリングして得られた表示画像である。この表示画像のことも3次元部分画像R1と呼ぶ。3次元部分画像R1は、図25に示す断面を外面の一部とする、前眼部の3次元領域を表す画像である。
また、レンダリング部92は、ユーザーにより指定された断面を表す2次元断面画像を構築することができる。図27に示す画像R2は、図25に示す断面で3次元画像を切断して得られた2次元断面画像である。
ユーザーは、表示デバイスに表示された表示画像R0を観察し、図示しない操作デバイスを用いて所望のスライスを指定することができる。図28に示す2つの点線は、ユーザーが表示画像R0に対して指定したスライスを画成する2つの断面の位置を示す。つまり、これら2つの断面で挟まれた領域が、ユーザーが表示画像R0に対して指定したスライスである。
レンダリング部92は、ユーザーにより指定されたスライスに対応する3次元スライス画像を構築することができる。図29に示す画像R3は、図28に示す断面で3次元画像を切断して得られた3次元スライス画像をレンダリングして得られた表示画像である。この表示画像のことも3次元スライス画像R3と呼ぶ。3次元スライス画像R3は、図28に示す2つの断面を外面の一部とする、前眼部の3次元領域を表す画像である。
ユーザーは、3次元画像をレンダリングして前眼部の外面や所望の断面を観察したり、第10実施形態の計測を行ったりすることにより、前眼部の状態を把握することができる。そして、読影レポートを作成することができる。
〈第12実施形態〉
本実施形態では、眼科撮影装置と情報処理装置とを含む眼科システムについて説明する。眼科撮影装置は、少なくともスリットランプ顕微鏡としての機能を有する。眼科撮影装置に含まれるスリットランプ顕微鏡は、第1~第11実施形態のいずれかのスリットランプ顕微鏡であってよい。以下、第1~第11実施形態で説明した要素や構成や符号を適宜に準用する。
本実施形態では、眼科撮影装置と情報処理装置とを含む眼科システムについて説明する。眼科撮影装置は、少なくともスリットランプ顕微鏡としての機能を有する。眼科撮影装置に含まれるスリットランプ顕微鏡は、第1~第11実施形態のいずれかのスリットランプ顕微鏡であってよい。以下、第1~第11実施形態で説明した要素や構成や符号を適宜に準用する。
図30に例示された眼科システム1000は、眼科撮影が行われるT個の施設(第1施設~第T施設)のそれぞれと、サーバ4000と、遠隔端末5000mとを結ぶ通信路(通信回線)1100を利用して構築されている。
ここで、眼科撮影は、スリットランプ顕微鏡を用いた前眼部撮影を少なくとも含む。この前眼部撮影は、少なくとも、第1~第11実施形態で説明した、スリット光を用いた前眼部スキャンを含む。
各施設(第t施設:t=1~T、Tは1以上の整数)には、眼科撮影装置2000-it(it=1~Kt、Ktは1以上の整数)が設置されている。つまり、各施設(第t施設)には、1以上の眼科撮影装置2000-itが設置されている。眼科撮影装置2000-itは、眼科システム1000の一部を構成する。なお、眼科以外の検査を実施可能な検査装置が眼科システム1000に含まれていてもよい。
本例の眼科撮影装置2000-itは、被検眼の撮影を実施する「撮影装置」としての機能と、各種データ処理や外部装置との通信を行う「コンピュータ」としての機能の双方を備えている。他の例において、撮影装置とコンピュータとを別々に設けることが可能である。この場合、撮影装置とコンピュータとは互いに通信可能に構成されてよい。更に、撮影装置の数とコンピュータの数とはそれぞれ任意であり、例えば単一のコンピュータと複数の撮影装置とを設けることができる。
眼科撮影装置2000-itにおける「撮影装置」は、少なくともスリットランプ顕微鏡を含む。このスリットランプ顕微鏡は、第1~第11実施形態のいずれかのスリットランプ顕微鏡であってよく、第1実施形態の構成(図1)又は第2実施形態の構成(図5)を少なくとも含む。
更に、各施設(第t施設)には、補助者や被検者により使用可能な情報処理装置(端末3000-t)が設置されている。端末3000-tは、当該施設において使用されるコンピュータであり、例えば、タブレット端末やスマートフォン等のモバイル端末、当該施設に設置されたサーバなどであってよい。更に、端末3000-tは、無線型イヤフォン等のウェアラブルデバイスを含んでいてもよい。なお、端末3000-tは、当該施設においてその機能を使用可能なコンピュータであれば十分であり、例えば、当該施設の外に設置されたコンピュータ(クラウドサーバ等)であってもよい。
眼科撮影装置2000-itと端末3000-tとは、第t施設内に構築されたネットワーク(施設内LAN等)や、広域ネットワーク(インターネット等)や、近距離通信技術を利用して通信を行えるように構成されてよい。
眼科撮影装置2000-itは、サーバ等の通信機器としての機能を備えていてよい。この場合、眼科撮影装置2000-itと端末3000-tとが直接に通信を行うように構成することができる。これにより、サーバ4000と端末3000-tとの間の通信を眼科撮影装置2000-itを介して行うことができるので、端末3000-tとサーバ4000との間で通信を行う機能を設ける必要がなくなる。
サーバ4000は、典型的には、第1~第T施設のいずれとも異なる施設に設置され、例えば管理センタに設置されている。サーバ4000は、ネットワーク(LAN、広域ネットワーク等)を介して、遠隔端末5000m(m=1~M、Mは1以上の整数)と通信が可能である。更に、サーバ4000は、第1~第T施設に設置された眼科撮影装置2000-itの少なくとも一部との間で、広域ネットワークを介して通信が可能である。
サーバ4000は、例えば、眼科撮影装置2000-itと遠隔端末5000mとの間の通信を中継する機能と、この通信の内容を記録する機能と、眼科撮影装置2000-itにより取得されたデータや情報を記憶する機能と、遠隔端末5000mにより取得されたデータや情報を記憶する機能とを備える。サーバ4000は、データ処理機能を備えてもよい。
遠隔端末5000mは、眼科撮影装置2000-itによって取得された被検眼の画像(複数の前眼部画像、又は、これらに基づく3次元画像のレンダリング画像)の読影と、レポート作成とに使用可能なコンピュータを含む。遠隔端末5000mは、データ処理機能を備えてもよい。
サーバ4000について説明する。図31に例示されたサーバ4000は、制御部4010と、通信確立部4100と、通信部4200とを備える。
制御部4010は、サーバ4000の各部の制御を実行する。制御部4010は、その他の演算処理を実行可能であってよい。制御部4010はプロセッサを含む。制御部4010は、更に、RAM、ROM、ハードディスクドライブ、ソリッドステートドライブなどを含んでいてよい。
制御部4010は、通信制御部4011と転送制御部4012とを含む。
通信制御部4011は、複数の眼科撮影装置2000-itと複数の端末3000-tと複数の遠隔端末5000mとを含む複数の装置の間における通信の確立に関する制御を実行する。例えば、通信制御部4011は、眼科システム1000に含まれる複数の装置のうちから後述の選択部4120によって選択された2以上の装置のそれぞれに向けて、通信を確立するための制御信号を送る。
転送制御部4012は、通信確立部4100(及び通信制御部4011)により通信が確立された2以上の装置の間における情報のやりとりに関する制御を行う。例えば、転送制御部4012は、通信確立部4100(及び通信制御部4011)により通信が確立された少なくとも2つの装置のうちの一方の装置から送信された情報を他の装置に転送するように機能する。
具体例として、眼科撮影装置2000-itと遠隔端末5000mとの間の通信が確立された場合、転送制御部4012は、眼科撮影装置2000-itから送信された情報(例えば、スリット光を用いた前眼部スキャンで得られた複数の前眼部画像、又は、これら前眼部画像に基づき構築された3次元画像)を遠隔端末5000mに転送することができる。逆に、転送制御部4012は、遠隔端末5000mから送信された情報(例えば、眼科撮影装置2000-itへの指示、読影レポートなど)を眼科撮影装置2000-itに転送することができる。
転送制御部4012は、送信元の装置から受信した情報を加工する機能を有していてもよい。この場合、転送制御部4012は、受信した情報と、加工処理により得られた情報との少なくとも一方を転送先の装置に送信することができる。
例えば、転送制御部4012は、眼科撮影装置2000-it等から送信された情報の一部を抽出して遠隔端末5000m等に送信することができる。また、眼科撮影装置2000-it等から送信された情報(例えば、前眼部画像又は3次元画像)をサーバ4000又は他の装置によって解析し、その解析結果(及び元の情報)を遠隔端末5000m等に送信するようにしてもよい。
眼科撮影装置2000-itから複数の前眼部画像が送信された場合、サーバ4000又は他の装置が、これら前眼部画像から3次元画像(例えば、スタックデータ又はボリュームデータ)を構築し、転送制御部4012が、構築された3次元画像を遠隔端末5000mに送信するように構成することが可能である。
眼科撮影装置2000-itからスタックデータが送信された場合、サーバ4000又は他の装置が、このスタックデータからボリュームデータを構築し、転送制御部4012が、構築されたボリュームデータを遠隔端末5000mに送信するように構成することが可能である。
サーバ4000又は他の装置により実行可能なデータ加工処理は、上記した例には限定されず、任意のデータ処理を含んでいてよい。例えば、サーバ4000又は他の装置は、3次元画像のレンダリング、アーティファクト除去、歪み補正、計測など、第1~第11実施形態で説明した任意の処理を実行可能であってよい。
通信確立部4100は、複数の眼科撮影装置2000-itと複数の端末3000-tと複数の遠隔端末5000mとを含む複数の装置のうちから選択された少なくとも2つの装置の間における通信を確立するための処理を実行する。本実施形態において「通信の確立」とは、例えば、(1)通信が切断された状態から一方向通信を確立すること、(2)通信が切断された状態から双方向通信を確立すること、(3)受信のみが可能な状態から送信も可能な状態に切り替えること、(4)送信のみが可能な状態から受信も可能な状態に切り替えること、のうちの少なくとも1つを含む概念である。
更に、通信確立部4100は、確立されている通信を切断する処理を実行可能である。本実施形態において「通信の切断」とは、例えば、(1)一方向通信が確立された状態から通信を切断すること、(2)双方向通信が確立された状態から通信を切断すること、(3)双方向通信が確立された状態から一方向通信に切り替えること、(4)送信及び受信が可能な状態から受信のみが可能な状態に切り替えること、(5)送信及び受信が可能な状態から送信のみが可能な状態に切り替えること、のうちの少なくとも1つを含む概念である。
眼科撮影装置2000-it、端末3000-t、及び遠隔端末5000mのそれぞれは、他の装置(そのユーザー)を呼び出すための通信要求(呼び出し要求)と、他の2つの装置の間の通信に割り込むための通信要求(割り込み要求)とのうちの少なくとも一方をサーバ4000に送信することができる。呼び出し要求及び割り込み要求は、手動又は自動で発信される。サーバ4000(通信部4200)は、眼科撮影装置2000-it、端末3000-t、又は遠隔端末5000mから送信された通信要求を受信する。
本実施形態において、通信確立部4100は選択部4120を含んでいてよい。選択部4120は、例えば、眼科撮影装置2000-it、端末3000-t、又は遠隔端末5000mから送信された通信要求に基づいて、眼科撮影装置2000-it、端末3000-t、及び遠隔端末5000mのうちから、当該通信要求を送信した装置以外の1以上の装置を選択する。
選択部4120が実行する処理の具体例を説明する。眼科撮影装置2000-it又は端末3000-tからの通信要求(例えば、眼科撮影装置2000-itにより取得された画像の読影の要求)を受けた場合、選択部4120は、例えば、複数の遠隔端末5000mのうちのいずれかを選択する。通信確立部4100は、選択された遠隔端末5000mと、眼科撮影装置2000-it及び端末3000-tの少なくとも一方との間の通信を確立する。
通信要求に応じた装置の選択は、例えば、予め設定された属性に基づいて実行される。この属性の例として、検査の種別(例えば、撮影モダリティの種別、画像の種別、疾患の種別、候補疾患の種別など)や、要求される専門度・熟練度や、言語の種別などがある。本例に係る処理を実現するために、通信確立部4100は、予め作成された属性情報が記憶された記憶部4110を含んでいてよい。属性情報には、遠隔端末5000m及び/又はそのユーザー(医師、オプトメトリスト等)の属性が記録されている。
ユーザーの識別は、事前に割り当てられたユーザーIDによって行われる。また、遠隔端末5000mの識別は、例えば、事前に割り当てられた装置IDやネットワークアドレスによって行われる。典型的な例において、属性情報は、各ユーザーの属性として、専門分野(例えば、診療科、専門とする疾患など)、専門度・熟練度、使用可能な言語の種別などを含む。
選択部4120が属性情報を参照する場合、眼科撮影装置2000-it、端末3000-t、又は遠隔端末5000mから送信される通信要求は、属性に関する情報を含んでいてよい。例えば、眼科撮影装置2000-itから送信される読影要求(つまり、診断要求)は、次のいずれかの情報を含んでいてよい:(1)撮影モダリティの種別を示す情報;(2)画像の種別を示す情報;(3)疾患名や候補疾患名を示す情報;(4)読影の難易度を示す情報;(5)眼科撮影装置2000-it及び/又は端末3000-tのユーザーの使用言語を示す情報。
このような読影要求を受信した場合、選択部4120は、この読影要求と記憶部4110に記憶された属性情報とに基づいて、いずれかの遠隔端末5000mを選択することができる。このとき、選択部4120は、読影要求に含まれる属性に関する情報と、記憶部4110に記憶された属性情報に記録された情報とを照合する。それにより、選択部4120は、例えば、次のいずれかの属性に該当する医師(又はオプトメトリスト)に対応する遠隔端末5000mを選択する:(1)当該撮影モダリティを専門とする医師;(2)当該画像種別を専門とする医師;(3)当該疾患(当該候補疾患)を専門とする医師;(4)当該難易度の読影が可能な医師;(5)当該言語を使用可能な医師。
なお、医師やオプトメトリストと、遠隔端末5000mとの間の対応付けは、例えば、遠隔端末5000m(又は眼科システム1000)へのログイン時に入力されたユーザーIDによってなされる。
通信部4200は、他の装置(例えば、眼科撮影装置2000-it、端末3000-t、及び遠隔端末5000mのいずれか)との間でデータ通信を行う。データ通信の方式や暗号化については、眼科撮影装置2000-itに設けられた通信部(第1実施形態の通信部9)と同様であってよい。
サーバ4000は、データ処理部4300を含む。データ処理部4300は、各種のデータ処理を実行する。データ処理部4300は、眼科撮影装置2000-it(特に、スリットランプ顕微鏡)により取得された複数の前眼部画像又は3次元画像を処理することができる。データ処理部4300は、プロセッサ、主記憶装置、補助記憶装置などを含む。補助記憶装置には、データ処理プログラム等が記憶されている。データ処理部4300の機能は、データ処理プログラム等のソフトウェアと、プロセッサ等のハードウェアとの協働によって実現される。
データ処理部4300は、データ処理部8、データ処理部8A(画像選択部81、3次元画像構築部82)、データ処理部8B(アーティファクト除去部83、3次元画像構築部84)、データ処理部8C(3次元画像構築部85)、データ処理部8D(3次元画像構築部86、画像位置決定部87)、3次元画像構築部88(画像領域抽出部89、画像合成部90)、データ処理部8E(3次元画像構築部91、レンダリング部92)、データ処理部8F(歪み補正部93)、及び、データ処理部8G(計測部94)のうちのいずれか1つ以上を含んでいてよい。
サーバ4000は、データ処理部4300により得られたデータを他の装置に提供することができる。例えば、データ処理部4300が、眼科撮影装置2000-itにより取得された複数の前眼部画像から3次元画像を構築した場合、サーバ4000は、通信部4200により、この3次元画像を遠隔端末5000mに送信することができる。データ処理部4300が、眼科撮影装置2000-it又はデータ処理部4300により構築された3次元画像をレンダリングした場合、サーバ4000は、通信部4200により、構築されたレンダリング画像を遠隔端末5000mに送信することができる。データ処理部4300が、1以上の前眼部画像又は3次元画像に計測処理を適用した場合、サーバ4000は、通信部4200により、得られた計測データを遠隔端末5000mに送信することができる。データ処理部4300が、1以上の前眼部画像又は3次元画像に歪み補正を適用した場合、サーバ4000は、通信部4200により、補正された画像を遠隔端末5000mに送信することができる。
続いて、遠隔端末5000mについて説明する。図32に例示された遠隔端末5000mは、制御部5010と、データ処理部5100と、通信部5200と、操作部5300とを備える。
制御部5010は、遠隔端末5000mの各部の制御を実行する。制御部5010は、その他の演算処理を実行可能であってよい。制御部5010は、プロセッサ、RAM、ROM、ハードディスクドライブ、ソリッドステートドライブなどを含む。
制御部5010は表示制御部5011を含む。表示制御部5011は、表示装置6000mを制御する。表示装置6000mは、遠隔端末5000mに含まれてもよいし、遠隔端末5000mに接続された周辺機器であってもよい。表示制御部5011は、被検眼Eの前眼部の画像を表示装置6000mに表示させる。前眼部の画像の例として、スリット撮影画像、シャインプルーフ撮影画像、3次元画像のレンダリング画像、正面画像、他のモダリティの画像(OCT画像等)、計測結果を表す画像、解析結果を表す画像などがある。
制御部5010はレポート作成制御部5012を含む。レポート作成制御部5012は、表示制御部5011により表示された情報に関するレポートを作成するための各種の制御を実行する。例えば、レポート作成制御部5012は、レポートを作成するための画面やグラフィカルユーザーインターフェイス(GUI)を表示装置6000mに表示させる。また、レポート作成制御部5012は、ユーザーが入力した情報や、前眼部の画像や、計測データや、解析データなどを、所定のレポートテンプレートに入力する。
〈データ処理部5100〉
データ処理部5100は、各種のデータ処理を実行する。データ処理部5100は、眼科撮影装置2000-it(特に、スリットランプ顕微鏡)により取得された複数の前眼部画像又は3次元画像を処理することができる。また、データ処理部5100は、サーバ4000等の他の情報処理装置により構築された3次元画像又はレンダリング画像を処理することができる。データ処理部5100は、プロセッサ、主記憶装置、補助記憶装置などを含む。補助記憶装置には、データ処理プログラム等が記憶されている。データ処理部5100の機能は、データ処理プログラム等のソフトウェアと、プロセッサ等のハードウェアとの協働によって実現される。
データ処理部5100は、各種のデータ処理を実行する。データ処理部5100は、眼科撮影装置2000-it(特に、スリットランプ顕微鏡)により取得された複数の前眼部画像又は3次元画像を処理することができる。また、データ処理部5100は、サーバ4000等の他の情報処理装置により構築された3次元画像又はレンダリング画像を処理することができる。データ処理部5100は、プロセッサ、主記憶装置、補助記憶装置などを含む。補助記憶装置には、データ処理プログラム等が記憶されている。データ処理部5100の機能は、データ処理プログラム等のソフトウェアと、プロセッサ等のハードウェアとの協働によって実現される。
データ処理部5100は、データ処理部8、データ処理部8A(画像選択部81、3次元画像構築部82)、データ処理部8B(アーティファクト除去部83、3次元画像構築部84)、データ処理部8C(3次元画像構築部85)、データ処理部8D(3次元画像構築部86、画像位置決定部87)、3次元画像構築部88(画像領域抽出部89、画像合成部90)、データ処理部8E(3次元画像構築部91、レンダリング部92)、データ処理部8F(歪み補正部93)、及び、データ処理部8G(計測部94)のうちのいずれか1つ以上を含んでいてよい。
通信部5200は、他の装置(例えば、眼科撮影装置2000-it、端末3000-t、及びサーバ4000のいずれか)との間でデータ通信を行う。データ通信の方式や暗号化については、眼科撮影装置2000-itの通信部と同様であってよい。
操作部5300は、遠隔端末5000mの操作、遠隔端末5000mへの情報入力などに使用される。本実施形態では、操作部5300はレポートの作成に使用される。操作部5300は、操作デバイスや入力デバイスを含む。操作部5300は、例えば、マウス、キーボード、トラックボール、操作パネル、スイッチ、ボタン、ダイアルなどを含む。操作部5300は、タッチスクリーンを含んでもよい。
本実施形態により奏される効果を説明する。
眼科システム1000は、1以上のスリットランプ顕微鏡(眼科撮影装置2000-it)と1以上の情報処理装置(サーバ4000及び/又は遠隔端末5000m)とを含む。情報処理装置は、通信回線を介してスリットランプ顕微鏡に接続されており、スリットランプ顕微鏡により取得された被検眼の前眼部の画像を処理する。
スリットランプ顕微鏡(眼科撮影装置2000-it)は、照明系と、撮影系と、移動機構とを含む。照明系は、被検眼の前眼部にスリット光を照射する。撮影系は、スリット光が照射されている前眼部からの光を導く光学系と、光学系により導かれた光を撮像面で受光する撮像素子とを含む。移動機構は、照明系及び撮影系を移動する移動機構とを含む。照明系の光軸に沿う物面と光学系と撮像面とは、シャインプルーフの条件を満足する。撮影系は、移動機構による照明系及び撮影系の移動と並行して繰り返し撮影を行うことにより前眼部の複数の画像を取得する。
スリットランプ顕微鏡(眼科撮影装置2000-it)の照明系及び撮影系は、少なくとも角膜前面及び水晶体後面により画成される部位に撮影系のピントが合うように構成されていてもよい。
照明系は、被検者の体軸方向を長手方向とするスリット光を前眼部に照射するように構成されていてよい。この場合、移動機構は、体軸方向に直交する方向に照明系及び撮影系を移動するように構成されていてよい。
スリット光の長さは、体軸方向における角膜径以上に設定されていてよい。加えて、移動機構による照明系及び撮影系の移動距離は、体軸方向に直交する方向における角膜径以上に設定されていてよい。
このような構成を有する本実施形態によれば、少なくとも、第1実施形態と同様の効果が奏される。また、第1実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。
本実施形態において、スリットランプ顕微鏡(眼科撮影装置2000-it)の撮影系は、第1撮影系と第2撮影系とを含んでいてよい。第1撮影系は、スリット光が照射されている前眼部からの光を導く第1光学系と、第1光学系により導かれた光を第1撮像面で受光する第1撮像素子とを含む。更に、第1撮影系は、照明系及び撮影系の移動と並行して繰り返し撮影を行うことにより第1画像群を取得する。第2撮影系は、スリット光が照射されている前眼部からの光を導く第2光学系と、第2光学系により導かれた光を第2撮像面で受光する第2撮像素子とを含む。更に、第2撮影系は、照明系及び撮影系の移動と並行して繰り返し撮影を行うことにより第2画像群を取得する。また、第1光学系の光軸と第2光学系の光軸とは、互いに異なる向きに配置されている。加えて、物面と第1光学系と第1撮像面とがシャインプルーフの条件を満足し、且つ、物面と第2光学系と第2撮像面とがシャインプルーフの条件を満足する。
撮影系に含まれる光学系は、反射器と、1以上のレンズとを含んでいてよい。反射器は、スリット光が照射されている前眼部からの光であって、照明系の光軸から離れる方向に進行する光を、照明系の光軸に近づく方向に反射するように構成及び配置される。1以上のレンズは、反射器により反射された光を撮像面に結像させるように構成及び配置される。
このような構成を有する本実施形態によれば、少なくとも、第2実施形態と同様の効果が奏される。また、第2実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。
本実施形態において、第1光学系の光軸と第2光学系の光軸とは、照明系の光軸に対して互いに反対の方向に傾斜して配置されていてよい。更に、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、第1撮影系及び第2撮影系により実質的に同時に取得された2つの画像のいずれかにアーティファクトが含まれるか判定し、これら2つの画像のうちの一方の画像にアーティファクトが含まれると判定されたときに他方の画像を選択する画像選択部を含んでいてよい。
また、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、画像選択部により第1画像群及び第2画像群から選択された画像を含む画像群に基づいて3次元画像を構築する3次元画像構築部を含んでいてよい。
このような構成を有する本実施形態によれば、少なくとも、第3実施形態と同様の効果が奏される。また、第3実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。
本実施形態において、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、第1撮影系及び第2撮影系により実質的に同時に取得された2つの画像を比較することによりこれら2つの画像のいずれかにアーティファクトが含まれるか判定し、これら2つの画像のいずれかにアーティファクトが含まれると判定されたときに当該アーティファクトを除去するアーティファクト除去部を含んでいてよい。
また、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、アーティファクト除去部によりアーティファクトが除去された画像を含む画像群に基づいて3次元画像を構築する3次元画像構築部を含んでいてよい。
このような構成を有する本実施形態によれば、少なくとも、第4実施形態と同様の効果が奏される。また、第4実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。
本実施形態において、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、スリットランプ顕微鏡(眼科撮影装置2000-it)により取得された複数の画像に基づいて3次元画像を構築する3次元画像構築部を含んでいてよい。
このような構成を有する本実施形態によれば、少なくとも、第5実施形態と同様の効果が奏される。また、第5実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。
本実施形態において、移動機構は、照明系の光軸を回転軸として照明系及び撮影系を一体的に回転する回転機構を含んでいてよい。更に、照明系及び撮影系が第1回転位置に配置されているときに撮影系は複数の画像を取得し、且つ、第1回転位置と異なる第2回転位置に照明系及び撮影系が配置されているときに撮影系は照明系によりスリット光が照射されている前眼部の画像を取得することができる。加えて、3次元画像構築部は、第2回転位置において取得された画像に基づいて複数の画像の相対位置を決定する画像位置決定部を含んでいてよい。
このような構成を有する本実施形態によれば、少なくとも、第6実施形態と同様の効果が奏される。また、第6実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。
本実施形態において、3次元画像構築部は、スリットランプ顕微鏡(眼科撮影装置2000-it)により取得された複数の画像のそれぞれから、スリット光の照射領域に対応する画像領域を抽出する画像領域抽出部と、画像領域抽出部により複数の画像からそれぞれ抽出された複数の画像領域を合成して3次元画像を構築する画像合成部とを含んでいてよい。
画像領域抽出部は、スリットランプ顕微鏡(眼科撮影装置2000-it)により取得された複数の画像のそれぞれから、スリット光の照射領域及び前眼部の所定部位の双方に対応する画像領域を抽出するように構成されていてよい。
所定部位は、角膜前面及び水晶体後面により画成される部位であってよい。
このような構成を有する本実施形態によれば、少なくとも、第7実施形態と同様の効果が奏される。また、第7実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。
本実施形態において、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、3次元画像をレンダリングしてレンダリング画像を構築するレンダリング部を含んでいてよい。
3次元画像に対して断面が指定されたとき、レンダリング部は、3次元画像を当該断面で切断して3次元部分画像を構築することができる。
3次元画像に対して断面が指定されたとき、レンダリング部は、当該断面を表す2次元断面画像を構築することができる。
3次元画像に対してスライスが指定されたとき、レンダリング部は、当該スライスに対応する3次元スライス画像を構築することができる。
このような構成を有する本実施形態によれば、少なくとも、第8実施形態と同様の効果が奏される。また、第8実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。
本実施形態において、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、照明系の光軸と撮影系の光軸とがなす角度である光軸角度に起因する歪みを補正するための処理を、スリットランプ顕微鏡(眼科撮影装置2000-it)により取得された複数の画像のうちの少なくとも1つに適用する歪み補正部を含んでいてよい。
撮影系に含まれる光学系の光軸は、照明系の光軸に対して、照明系の光軸に沿う第1方向及びスリット光の長手方向に沿う第2方向の双方に直交する第3方向に傾斜して配置されていてよい。この場合、歪み補正部は、第1方向及び第2方向の双方を含む平面における歪みを補正するための処理を実行することができる。
歪み補正部は、所定の基準角度と光軸角度とに基づき設定された補正係数を予め記憶しており、当該補正係数に基づいて歪みを補正するための処理を実行するように構成されていてよい。
このような構成を有する本実施形態によれば、少なくとも、第9実施形態と同様の効果が奏される。また、第9実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。
本実施形態において、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、スリットランプ顕微鏡(眼科撮影装置2000-it)により取得された複数の画像のうちの少なくとも1つを解析することにより所定の計測値を求める第1計測部を含んでいてよい。
また、本実施形態において、情報処理装置(サーバ4000及び/又は遠隔端末5000m)は、3次元画像構築部により構築された3次元画像を解析することにより所定の計測値を求める第2計測部を含んでいてよい。
このような構成を有する本実施形態によれば、少なくとも、第10実施形態と同様の効果が奏される。また、第10実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。
本実施形態において、スリットランプ顕微鏡(眼科撮影装置2000-it)は、撮影系による複数の画像の取得と並行して前眼部を固定位置から動画撮影する動画撮影系を含んでいてよい。
更に、スリットランプ顕微鏡(眼科撮影装置2000-it)は、動画撮影系により取得される動画像を解析して被検眼の運動を検出する運動検出部を含んでいてよい。
加えて、スリットランプ顕微鏡(眼科撮影装置2000-it)は、運動検出部からの出力に基づいて移動機構を制御する移動制御部を含んでいてよい。
このような構成を有する本実施形態によれば、少なくとも、第11実施形態と同様の効果が奏される。また、第11実施形態で説明した構成、要素、機能、作用、効果などの任意の事項を、本実施形態に適用することが可能である。
〈その他の事項〉
以上に説明した実施形態は本発明の典型的な例示に過ぎない。よって、本発明の要旨の範囲内における任意の変形(省略、置換、付加等)を適宜に施すことが可能である。
以上に説明した実施形態は本発明の典型的な例示に過ぎない。よって、本発明の要旨の範囲内における任意の変形(省略、置換、付加等)を適宜に施すことが可能である。
第1~第12実施形態のいずれか1つ又はいずれか2以上の組み合わせに係る処理をコンピュータに実行させるプログラムを構成することが可能である。また、第1~第12実施形態のいずれか1つ又はいずれか2以上の組み合わせに対して本発明の要旨の範囲内における任意の変形を適用することによって実現される処理をコンピュータに実行させるプログラムを構成することが可能である。
更に、このようなプログラムを記録したコンピュータ可読な非一時的記録媒体を作成することが可能である。この非一時的記録媒体は任意の形態であってよく、その例として、磁気ディスク、光ディスク、光磁気ディスク、半導体メモリなどがある。
本発明は、第1~第12実施形態のいずれか1つ又はいずれか2以上の組み合わせにより実現される方法を含む。また、第1~第12実施形態のいずれか1つ又はいずれか2以上の組み合わせに対して本発明の要旨の範囲内における任意の変形を適用することによって実現される方法も、本発明に含まれる。
1 スリットランプ顕微鏡
2 照明系
3 撮影系
4 光学系
5 撮像素子
6 移動機構
7 制御系
8 データ処理部
9 通信部
2 照明系
3 撮影系
4 光学系
5 撮像素子
6 移動機構
7 制御系
8 データ処理部
9 通信部
Claims (3)
- 被検眼の前眼部にスリット光を照射する照明系と、
前記スリット光が照射されている前記前眼部からの光を導く光学系と、前記光学系により導かれた前記光を撮像面で受光する撮像素子とを含む撮影系と、
前記前眼部を正面から動画撮影することによって、前記前眼部の所定部位が描出されたフレームを逐次に取得する動画撮影系と、
前記動画撮影系を移動することなく前記照明系及び前記撮影系を移動する移動機構と、
制御部と
を含み、
前記照明系の光軸に沿う物面と前記光学系と前記撮像面とがシャインプルーフの条件を満足し、
前記動画撮影系による前記正面且つ固定位置からの前記前眼部の動画撮影と並行して、前記制御部は、前記照明系及び前記撮影系を移動するための前記移動機構の制御と前記前眼部を繰り返し撮影して複数の画像を取得するための前記撮影系の制御とを並行して実行する
ことを特徴とするスリットランプ顕微鏡。 - 前記移動機構の前記制御及び前記撮影系の前記制御と並行して前記動画撮影系により逐次に取得されるフレームを解析して前記所定部位に相当する特徴点を特定し、逐次に特定された前記特徴点の位置の時間変化に基づき前記被検眼の運動を検出する運動検出部を更に含む
ことを特徴とする請求項1に記載のスリットランプ顕微鏡。 - 前記制御部は、前記運動検出部からの出力に基づいて前記移動機構の前記制御を実行する
ことを特徴とする請求項2に記載のスリットランプ顕微鏡。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024002303A JP2024028448A (ja) | 2018-06-13 | 2024-01-11 | スリットランプ顕微鏡 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018112936A JP7228342B2 (ja) | 2018-06-13 | 2018-06-13 | スリットランプ顕微鏡及び眼科システム |
| JP2022164555A JP7466607B2 (ja) | 2018-06-13 | 2022-10-13 | スリットランプ顕微鏡 |
| JP2024002303A JP2024028448A (ja) | 2018-06-13 | 2024-01-11 | スリットランプ顕微鏡 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022164555A Division JP7466607B2 (ja) | 2018-06-13 | 2022-10-13 | スリットランプ顕微鏡 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2024028448A true JP2024028448A (ja) | 2024-03-04 |
Family
ID=68842005
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018112936A Active JP7228342B2 (ja) | 2018-06-13 | 2018-06-13 | スリットランプ顕微鏡及び眼科システム |
| JP2022164555A Active JP7466607B2 (ja) | 2018-06-13 | 2022-10-13 | スリットランプ顕微鏡 |
| JP2024002303A Pending JP2024028448A (ja) | 2018-06-13 | 2024-01-11 | スリットランプ顕微鏡 |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018112936A Active JP7228342B2 (ja) | 2018-06-13 | 2018-06-13 | スリットランプ顕微鏡及び眼科システム |
| JP2022164555A Active JP7466607B2 (ja) | 2018-06-13 | 2022-10-13 | スリットランプ顕微鏡 |
Country Status (2)
| Country | Link |
|---|---|
| JP (3) | JP7228342B2 (ja) |
| WO (1) | WO2019240151A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7481705B2 (ja) | 2020-04-30 | 2024-05-13 | 国立研究開発法人理化学研究所 | 医療システム |
| JP2021176056A (ja) | 2020-05-01 | 2021-11-04 | 国立研究開発法人理化学研究所 | 医療システム及び医療情報処理装置 |
| JP7543002B2 (ja) | 2020-06-17 | 2024-09-02 | 株式会社トプコン | スリットランプ顕微鏡 |
| JP2022028197A (ja) * | 2020-08-03 | 2022-02-16 | 株式会社トプコン | スリットランプ顕微鏡 |
| JP2022054784A (ja) | 2020-09-28 | 2022-04-07 | 株式会社トプコン | 医療システム及び医療情報処理装置 |
| WO2023181779A1 (ja) * | 2022-03-22 | 2023-09-28 | ソニーグループ株式会社 | 検査システム |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4387195B2 (ja) | 2002-01-10 | 2009-12-16 | カール ツアイス メディテック アクチエンゲゼルシャフト | 人間の眼の水晶体を照明するための装置および方法 |
| JP3878164B2 (ja) | 2003-04-16 | 2007-02-07 | 賢治 柏木 | 眼科用検査装置 |
| JP5083758B2 (ja) | 2007-05-21 | 2012-11-28 | 国立大学法人山梨大学 | 眼科遠隔診断システム |
| US20090096987A1 (en) * | 2007-10-10 | 2009-04-16 | Ming Lai | Eye Measurement Apparatus and a Method of Using Same |
| EP2242418B1 (en) | 2007-12-21 | 2011-08-03 | SIFI MEDTECH S.r.l. | Dual scheimpflug system for three- dimensional analysis of an eye |
| JP5578560B2 (ja) * | 2010-09-03 | 2014-08-27 | 株式会社ニデック | 前眼部測定装置 |
| JP2017185367A (ja) | 2017-07-20 | 2017-10-12 | 株式会社トプコン | 細隙灯顕微鏡 |
-
2018
- 2018-06-13 JP JP2018112936A patent/JP7228342B2/ja active Active
-
2019
- 2019-06-12 WO PCT/JP2019/023204 patent/WO2019240151A1/ja active Application Filing
-
2022
- 2022-10-13 JP JP2022164555A patent/JP7466607B2/ja active Active
-
2024
- 2024-01-11 JP JP2024002303A patent/JP2024028448A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022179731A (ja) | 2022-12-02 |
| JP7466607B2 (ja) | 2024-04-12 |
| JP2019213734A (ja) | 2019-12-19 |
| WO2019240151A1 (ja) | 2019-12-19 |
| JP7228342B2 (ja) | 2023-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7466607B2 (ja) | スリットランプ顕微鏡 | |
| JP7154044B2 (ja) | スリットランプ顕微鏡及び眼科システム | |
| JP7321678B2 (ja) | スリットランプ顕微鏡及び眼科システム | |
| WO2021049341A1 (ja) | スリットランプ顕微鏡、眼科情報処理装置、眼科システム、スリットランプ顕微鏡の制御方法、プログラム、及び記録媒体 | |
| WO2021256130A1 (ja) | スリットランプ顕微鏡 | |
| JP7133950B2 (ja) | 眼科システム、眼科情報処理装置、プログラム、及び記録媒体 | |
| JP2024152821A (ja) | スリットランプ顕微鏡 | |
| JP7560303B2 (ja) | スリットランプ顕微鏡システム | |
| JP7345610B2 (ja) | スリットランプ顕微鏡 | |
| JP7517903B2 (ja) | スリットランプ顕微鏡システム | |
| JP7237219B2 (ja) | 眼科システム、眼科情報処理装置、プログラム、及び記録媒体 | |
| JP7560300B2 (ja) | スリットランプ顕微鏡システム | |
| WO2023037658A1 (ja) | 眼科装置、眼科装置を制御する方法、眼画像を処理する方法、プログラム、及び記録媒体 | |
| JP2024159832A (ja) | スリットランプ顕微鏡 | |
| CN116034306A (zh) | 裂隙灯显微镜 | |
| JP2020157041A (ja) | スリットランプ顕微鏡 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240116 |