JP2009192261A - 直線変位検出装置 - Google Patents
直線変位検出装置 Download PDFInfo
- Publication number
- JP2009192261A JP2009192261A JP2008030827A JP2008030827A JP2009192261A JP 2009192261 A JP2009192261 A JP 2009192261A JP 2008030827 A JP2008030827 A JP 2008030827A JP 2008030827 A JP2008030827 A JP 2008030827A JP 2009192261 A JP2009192261 A JP 2009192261A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- magnetic
- magnet material
- pole
- detection means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
【課題】低廉で且つ高精度な直線変位検出装置を提供する。
【解決手段】直線変位検出装置30が、表面20aにN極及びS極の磁極領域21,22,23,24,25を直線状に交互に並べて配列した磁石材料20と、磁場を検出する感磁面を有し、当該感磁面が磁石材料20の表面20aと対面して配置される磁場検出手段10とを備え、磁石材料20と磁場検出手段10とは、磁石材料20のN極の磁極領域21,24,25及びS極の磁極領域22,23の配列方向に沿って平行に相対移動可能である。
【選択図】図1
【解決手段】直線変位検出装置30が、表面20aにN極及びS極の磁極領域21,22,23,24,25を直線状に交互に並べて配列した磁石材料20と、磁場を検出する感磁面を有し、当該感磁面が磁石材料20の表面20aと対面して配置される磁場検出手段10とを備え、磁石材料20と磁場検出手段10とは、磁石材料20のN極の磁極領域21,24,25及びS極の磁極領域22,23の配列方向に沿って平行に相対移動可能である。
【選択図】図1
Description
本発明は、物体の直線変位を検出可能な直線変位検出装置に関する。
物体の直線変位を検出する装置として、例えば、非特許文献1に記載の直線変位検出装置がある。非特許文献1に記載の直線変位検出装置は、表面にN極領域及びS極領域を直線状に交互に並べて配列した磁石材料と、磁石材料により形成される磁場を検出する磁場検出手段とを備え、その磁石材料と磁場検出手段とが、磁石材料のN極領域及びS極領域の配列方向に沿って平行に相対移動可能に構成されたものである。具体的には、非特許文献1に記載の直線変位検出装置で用いられている磁場検出手段は、メレキシス社のMLX90316である。
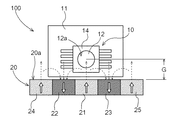
図18は、非特許文献1に記載の直線変位検出装置100が備える磁石材料と磁場検出手段との具体的な位置関係を説明する図である。この磁場検出手段10は、基板11上に搭載されたホールICによって実現できる。図2は磁場検出手段10の構成を説明する図である。磁場検出手段10には、感磁面12aを有する軟磁性プレート12と、軟磁性プレート12の端部近傍に配置される複数のホール素子13とが設けられている。磁場検出手段10は、N極領域21,24,25及びS極領域22,23が配列された磁石材料20の表面20aに対して、磁場検出手段10の感磁面12aが直交するように配置されている。つまり、非特許文献1に記載の磁気検出手段10は、感磁面12aに平行(図2のX−Y平面に平行)な磁場を検出する。そして、磁気検出手段10は、ホール素子13において感磁面12a内の2方向の磁場成分を検出し、それらからホール素子に印加されている磁場の方向を算出して磁場角度に応じた信号を出力する。検出できる磁場角度の範囲は360°(未満)である。
発明協会公開技報公技番号2006−503396号
ところが、磁場検出手段10と磁石材料20との位置関係が図18に示したようなものである場合、磁石材料20とホール素子13との間のギャップGは少なくとも磁場検出手段10のパッケージ寸法の1/2以上は必要である。基板11上の配線のレイアウトなども考慮すると、少なくとも4mm程度のギャップGが必要となってしまう。磁石材料20から、4mm程度のギャップGを隔てて設けられたホール素子13に十分な磁界を印加するには、NdFeBなどの磁力の強い高価な磁石が必要であり、結果として直線変位検出装置100のコストが高くなるという課題がある。
また、小ストローク(数mm程度)の相対移動を検出可能な程度の高い分解能を有する直線変位検出装置を実現する場合、N極領域及びS極領域の幅を検出ストロークに合わせて狭く配置する方がよい(検出ストローク内での検出磁場角度範囲を広くすることができるため)。しかし、N極領域及びS極領域の幅を狭くすると、ホール素子で検出可能な磁場が小さくなるため、検出精度が低くなる可能性がある。
また、小ストローク(数mm程度)の相対移動を検出可能な程度の高い分解能を有する直線変位検出装置を実現する場合、N極領域及びS極領域の幅を検出ストロークに合わせて狭く配置する方がよい(検出ストローク内での検出磁場角度範囲を広くすることができるため)。しかし、N極領域及びS極領域の幅を狭くすると、ホール素子で検出可能な磁場が小さくなるため、検出精度が低くなる可能性がある。
本発明は、上記の課題に鑑みてなされたものであり、その目的は、低廉で且つ高精度な直線変位検出装置を提供する点にある。
上記目的を達成するための本発明に係る直線変位検出装置の特徴構成は、表面にN極及びS極の磁極領域を直線状に交互に並べて配列した磁石材料と、
磁場を検出する感磁面を有し、当該感磁面が前記磁石材料の前記表面と対面して配置される磁場検出手段とを備え、
前記磁石材料と前記磁場検出手段とは、前記磁石材料の前記N極の磁極領域及び前記S極の磁極領域の配列方向に沿って平行に相対移動可能である点にある。
磁場を検出する感磁面を有し、当該感磁面が前記磁石材料の前記表面と対面して配置される磁場検出手段とを備え、
前記磁石材料と前記磁場検出手段とは、前記磁石材料の前記N極の磁極領域及び前記S極の磁極領域の配列方向に沿って平行に相対移動可能である点にある。
上記特徴構成によれば、磁場検出手段の感磁面が磁石材料の上記表面と対面して配置されるので、磁場検出手段の感磁面と磁石材料の上記表面とのギャップを自在に調節できる。特に、従来に比べて上記ギャップを小さくできる。よって、磁石材料の磁力が小さくても、上記ギャップを調節することで、磁石材料によって形成される磁場分布を磁場検出手段で良好に検出できる。つまり、磁石材料の磁力は小さくても構わないので、例えば、NdFeBなどの磁力の強い高価な磁石が必要になることもない。
従って、低廉で且つ高精度な直線変位検出装置を提供できる。
従って、低廉で且つ高精度な直線変位検出装置を提供できる。
本発明に係る直線変位検出装置の別の特徴構成は、前記N極の磁極領域及び前記S極の磁極領域の配列方向に沿った方向の前記磁石材料の磁化の強さの分布は正弦波状である点にある。
上記特徴構成によれば、磁石材料における磁化の強さの分布は正弦波状であるので、つまり、各磁極領域の中心が最も磁化の強度が強く、周辺部へいくにつれて徐々に磁化が弱くなるように着磁されているので、磁石材料の外部に形成される磁場の強さの分布も、相対移動方向に沿って正弦波分布となる。よって、磁場の強さが磁石材料と磁場検出手段との相対移動量に応じて急激に変化しないので、その磁場を検出した磁場検出手段が導出する磁場角度の精度が高くなり、導出した磁場角度の値に基づいて、両者がどの相対位置にあるのかを正確に導出できる。
本発明に係る直線変位検出装置の別の特徴構成は、前記磁石材料は、前記N極の磁極領域と前記S極の磁極領域との間に無磁化領域を有する点にある。
上記特徴構成によれば、N極の磁極領域とS極の磁極領域との間に無磁化領域を設けたことで、N極の磁極領域とS極の磁極領域との間の無磁化領域の近傍での磁場の変化が比較的緩やかになる。よって、磁場の強さが磁石材料と磁場検出手段との相対移動量に応じて急激に変化しないので、その磁場を検出した磁場検出手段が導出する磁場角度の精度が高くなり、導出した磁場角度の値に基づいて、両者がどの相対位置にあるのかを正確に導出できる。
本発明に係る直線変位検出装置の別の特徴構成は、前記磁石材料の端部以外に配列された前記磁極領域の前記配列方向に沿った方向の幅は互いに同じであり、
前記磁石材料の前記端部に配列された前記磁極領域の前記配列方向に沿った方向の幅は、前記磁石材料の端部以外に配列された前記磁極領域の前記配列方向に沿った方向の幅の1/2〜2/3である点にある。
前記磁石材料の前記端部に配列された前記磁極領域の前記配列方向に沿った方向の幅は、前記磁石材料の端部以外に配列された前記磁極領域の前記配列方向に沿った方向の幅の1/2〜2/3である点にある。
上記特徴構成によれば、端部に設けられた磁極領域による磁場が優勢となることが抑制される。つまり、磁石材料の外部に形成される磁場分布が不均一になることを抑制できる。
<第1実施形態>
以下に図面を参照して第1実施形態の直線変位検出装置30について説明する。
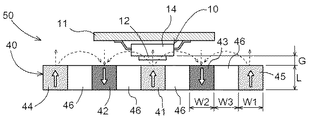
図1は、第1実施形態の直線変位検出装置30が備える磁石材料20と磁場検出手段10との具体的な位置関係を説明する図である。図2は、磁場検出手段10の構成を説明する図である。直線変位検出装置30は、磁石材料20と磁場検出手段10とを備える。本実施形態において、磁場検出手段10は、基板11上に搭載されたホールICによって実現できる。例えば、Melexis社のMLX90333等のホールICを用いることができる。磁石材料20は、フェライト磁石などを用いて形成されたものであり、表面20aにN極及びS極の磁極領域21,22,23,24,25を直線状に交互に並べて配列してある。図1では、5個の磁極領域で構成される磁石材料20を例示する。各磁極領域に描いている矢印の先端側がN極である。よって、図1に示す例では、3個のN極領域(N極の磁極領域)21,24,25と2個のS極領域(S極の磁極領域)22,23とを交互に並べて配列した磁石材料20の表面20aが、磁場検出手段10に対面している。各磁極領域は、異方性磁石に着磁して得られる。
以下に図面を参照して第1実施形態の直線変位検出装置30について説明する。
図1は、第1実施形態の直線変位検出装置30が備える磁石材料20と磁場検出手段10との具体的な位置関係を説明する図である。図2は、磁場検出手段10の構成を説明する図である。直線変位検出装置30は、磁石材料20と磁場検出手段10とを備える。本実施形態において、磁場検出手段10は、基板11上に搭載されたホールICによって実現できる。例えば、Melexis社のMLX90333等のホールICを用いることができる。磁石材料20は、フェライト磁石などを用いて形成されたものであり、表面20aにN極及びS極の磁極領域21,22,23,24,25を直線状に交互に並べて配列してある。図1では、5個の磁極領域で構成される磁石材料20を例示する。各磁極領域に描いている矢印の先端側がN極である。よって、図1に示す例では、3個のN極領域(N極の磁極領域)21,24,25と2個のS極領域(S極の磁極領域)22,23とを交互に並べて配列した磁石材料20の表面20aが、磁場検出手段10に対面している。各磁極領域は、異方性磁石に着磁して得られる。
磁場検出手段10は、磁場を検出する感磁面12aを有する。具体的には、磁場検出手段10は、円形の軟磁性材料で構成された、上記感磁面12aを構成する軟磁性プレート12と、その軟磁性プレート12の端部近傍に配置される複数のホール素子13(13a,13b,13c,13d)とを有する。本実施形態では、4個のホール素子13が、軟磁性プレート12の端部の直下に位置するような形態でチップ14上に設けられている。軟磁性プレート12は、各ホール素子13の一部を上方から覆う形態でチップ14上に設けられている。図示するように、4個のホール素子13は、円形の軟磁性プレート12の周囲において、90°間隔で配置されている。一対のホール素子13a,13bがX軸に沿って配置され、別の一対のホール素子13c,13dがY軸に沿って配置されている。軟磁性プレート12の感磁面12aは、XY平面と平行である。
本実施形態では、磁場検出手段10は、感磁面12aが磁石材料20の表面20aと対面して配置されている。また、磁石材料20と磁場検出手段10とは、磁石材料20のN極領域21,24,25及びS極領域22,23の配列方向に沿って平行に相対移動可能である。図1及び図2を参照すると、磁石材料20と磁場検出手段10とは、図2に示したX軸方向に平行に相対移動可能である。よって、磁場検出手段10は、ホール素子13a,13bで検出する相対移動方向に平行な方向(X軸方向)の磁場成分の強さと、ホール素子13a,13bで検出する相対移動方向に垂直な方向(Z軸方向)の磁場成分の強さとから、磁場の方向(磁場角度)を導出して、その磁場方向での磁石材料20と磁場検出手段10との相対位置を検出する。
具体的には、磁石材料20によって、その周囲には磁場分布が形成される。磁石材料20は、N極領域21,24,25とS極領域22,23とを直線状に交互に並べて配列されたものであるので、形成される磁場分布もN極領域21,24,25及びS極領域22,23の配列状態と対応して周期的に変化する。よって、磁場検出手段10で検出される磁束密度は、相対移動方向において、N極領域21,24,25の幅W1とS極領域22,23の幅W2との和(W1+W2)で表される変位量を一周期として変化する。よって、磁場検出手段10は、磁石材料20と磁場検出手段10との相対位置とその相対位置での磁場角度との関係を記憶しておけば、導出した磁場角度の値に基づいて、両者がどの相対位置にあるのかを導出できる。
次に、磁場検出手段10による、互いに直交するX軸・Y軸・Z軸の3方向の磁場検出の原理について説明する。本実施形態では、そのうちのX軸方向の磁場検出とZ軸方向の磁場検出とを行っている。図3は、磁場検出手段10の断面図であり、印加された磁場に応じた磁束の状態を実線で示す。
Y軸方向の磁場成分は以下のように検出される。つまり、図3(b)に示すように、Y軸方向の磁場成分が印加されると、軟磁性プレート12により磁束が曲げられて、Y軸方向に沿って配置した一対のホール素子13c,13dには、軟磁性プレート12に垂直なZ軸方向の磁場成分が発生する。このとき、Z軸方向の磁場成分の大きさは、外部磁場の大きさに比例したものとなり、ホール素子13cとホール素子13dとでは、発生する磁場成分の方向が逆方向となる。したがって、一対のホール素子13c,13dの出力電圧の差分を算出することにより、Y軸方向の外部磁場の大きさに比例した磁場成分を検出できる。
Y軸方向の磁場成分は以下のように検出される。つまり、図3(b)に示すように、Y軸方向の磁場成分が印加されると、軟磁性プレート12により磁束が曲げられて、Y軸方向に沿って配置した一対のホール素子13c,13dには、軟磁性プレート12に垂直なZ軸方向の磁場成分が発生する。このとき、Z軸方向の磁場成分の大きさは、外部磁場の大きさに比例したものとなり、ホール素子13cとホール素子13dとでは、発生する磁場成分の方向が逆方向となる。したがって、一対のホール素子13c,13dの出力電圧の差分を算出することにより、Y軸方向の外部磁場の大きさに比例した磁場成分を検出できる。
X軸方向の磁場成分が印加されたときも、Y軸方向の磁場成分が印加されたときと同様に、軟磁性プレート12に垂直なZ軸方向の磁場成分が発生する。したがって、磁場検出手段10は、X軸方向に沿って配置した一対のホール素子13a,13bの出力電圧の差分を算出することにより、X軸方向の磁場成分の大きさを検出できる。
Y軸方向の磁場成分を検出する際、Z軸方向の磁場成分については以下のとおり除去される。図3(a)に示すように、Z軸方向の磁場成分が印加されたときには、Y軸方向に沿って配置した一対のホール素子13c,13dには、軟磁性プレート12に垂直なZ軸方向の磁場成分が発生する。このときには、ホール素子13cとホール素子13dとでは、発生する磁場成分の方向が同じ方向となる。したがって、一対のホール素子13c,13dの出力電圧の差分を算出することにより、Z軸方向の磁場成分を除去できる。
X軸方向の磁場成分を検出する際も、同様に、一対のホール素子13a,13bの出力電圧の差分を算出することにより、Z軸方向の磁場成分を除去できる。
X軸方向の磁場成分を検出する際も、同様に、一対のホール素子13a,13bの出力電圧の差分を算出することにより、Z軸方向の磁場成分を除去できる。
一方、Z軸方向の磁場成分は、以下のように検出される。つまり、上述のように、Z軸方向の磁場成分が印加されたときには、Y軸方向に沿って配置した一対のホール素子13c,13dに発生する磁場成分の方向が同じ方向となる。したがって、磁場検出手段10は、Y軸方向に沿って配置した一対のホール素子13c,13dの出力電圧の和を算出することにより、Z軸方向の磁場成分の大きさを検出できる。
Z軸方向の磁場成分を検出する際、Y軸方向の磁場成分については、以下の通り除去される。つまり、上述の通り、Y軸方向の磁場成分が印加されたときには、Y軸方向に沿って配置された一対のホール素子13cとホール素子13dとでは、発生する磁場成分の方向が反対方向となる。従って、一対のホール素子13c,13dの出力電圧の和を算出することにより、Y軸方向の磁場成分を除去することができる。X軸方向の磁場成分を除去する場合も同様に可能である。
以上のように、磁場検出手段10は、X軸方向の磁場成分、Y軸方向の磁場成分及びZ軸方向の磁場成分を各別に検出できるので、XY平面、XZ平面及びYZ平面における磁場検出が各別に可能となる。
以下に、第1実施形態の直線変位検出装置30を用いた直線変位の検出結果を説明する。
図1に示したように、磁石材料20は、3個のN極領域21,24,25と2個のS極領域22,23とを交互に有している。本実施形態では、磁石材料20が有する各磁極領域の配列方向に沿った方向の幅は互いに同じにした。つまり、N極領域21,24,25の幅W1及びS極領域22,23の幅W2は互いに等しく、何れも6mmとした。また、各磁極領域の高さLは3mmであり、奥行きは5mmである。よって、この直線変位検出装置30では、12mmの範囲内での直線変位(即ち、磁石材料20と磁場検出手段10との相対移動)を検出できる。
図4は、このような磁石材料20を用いて、磁石材料20と磁場検出手段10とを相対移動させながら磁場検出手段10によって検出する磁束密度のグラフ(シミュレーション結果)である。この測定は、磁石材料20の表面20aと磁場検出手段10のホール素子13とのギャップGを変化させて行ったので、その結果も併せて示す。図4の横軸には、磁石材料20と磁場検出手段10との相対移動方向の変位量を示す。尚、軟磁性プレート12の中心と磁石材料20のN極領域21の中心とが互いに正面に相対する状態を原点(変位量=0)とする。図4の縦軸には、磁場検出手段10によって検出される磁束密度を示す。
図1に示したように、磁石材料20は、3個のN極領域21,24,25と2個のS極領域22,23とを交互に有している。本実施形態では、磁石材料20が有する各磁極領域の配列方向に沿った方向の幅は互いに同じにした。つまり、N極領域21,24,25の幅W1及びS極領域22,23の幅W2は互いに等しく、何れも6mmとした。また、各磁極領域の高さLは3mmであり、奥行きは5mmである。よって、この直線変位検出装置30では、12mmの範囲内での直線変位(即ち、磁石材料20と磁場検出手段10との相対移動)を検出できる。
図4は、このような磁石材料20を用いて、磁石材料20と磁場検出手段10とを相対移動させながら磁場検出手段10によって検出する磁束密度のグラフ(シミュレーション結果)である。この測定は、磁石材料20の表面20aと磁場検出手段10のホール素子13とのギャップGを変化させて行ったので、その結果も併せて示す。図4の横軸には、磁石材料20と磁場検出手段10との相対移動方向の変位量を示す。尚、軟磁性プレート12の中心と磁石材料20のN極領域21の中心とが互いに正面に相対する状態を原点(変位量=0)とする。図4の縦軸には、磁場検出手段10によって検出される磁束密度を示す。
図4に示すように、ギャップGを1.5mm〜7mmの間で変化させると、ギャップGが大きくなるにつれて磁場検出手段10で検出可能な磁束密度が小さくなっている。本実施形態で用いる磁場検出手段10にとって検出に望ましい磁束密度範囲は約0.02T〜約0.07Tである。図4のグラフから明らかであるように、直線変位検出装置30の直線変位の検出対象範囲である12mm(図中の−6mm〜+6mm)の範囲内で、磁束密度はほぼ均一である。よって、第1実施形態の磁場検出手段10を用いた場合、ギャップGが2mm〜3.5mmの範囲で上記検出に望ましい磁束密度範囲内の磁束密度を検出できる。
図5(a)は、磁石材料20と磁場検出手段10との相対移動方向の変位量と、磁場検出手段10の検出結果(シミュレーション)から算出される磁場角度(deg:°)との関係を示すグラフである。図5(a)から明らかであるように、変位と磁場角度との関係は比較的線形に近い形となっており、磁場検出手段10が導出した磁場角度から、磁石材料20と磁場検出手段10との相対位置を導出できることが分かる。この結果は、ギャップGが1.5mm〜2.5mmに共通して得られる。また、図5(b)は、磁石材料20と磁場検出手段10との相対移動方向の変位量と、任意の基準直線からの上記磁場角度の揺らぎ、即ち、磁場角度の非直線性(deg:°)との関係を示すグラフである。変位と磁場角度との関係が完全な線形である場合には、図5(b)に示した非直線性は0を示すが、図5(b)に示す例ではある程度の非直線性が存在していることが分かる。
以上のように、第1実施形態の直線変位検出装置30を用いることで、磁場検出手段10の感磁面12aが磁石材料20の上記表面20aと対面して配置できるので、磁場検出手段10の感磁面12aと磁石材料20の上記表面20aとのギャップを自在に調節できる。特に、従来に比べて上記ギャップを小さくできる。よって、磁石材料20の磁力が小さくても、上記ギャップを調節することで、磁石材料20によって形成される磁場分布を磁場検出手段10で良好に検出できる。つまり、磁石材料20の磁力は小さくても構わないので、例えば、NdFeBなどの磁力の強い高価な磁石が必要になることもない。
<第2実施形態>
第2実施形態の直線変位検出装置50は、磁石材料の構成が第1実施形態の直線変位検出装置と異なっている。以下に第2実施形態の直線変位検出装置50の構成について説明するが、第1実施形態と同様の構成については説明を省略する。
第2実施形態の直線変位検出装置50は、磁石材料の構成が第1実施形態の直線変位検出装置と異なっている。以下に第2実施形態の直線変位検出装置50の構成について説明するが、第1実施形態と同様の構成については説明を省略する。
図6は、第2実施形態の直線変位検出装置50が備える磁石材料40と磁場検出手段10との具体的な位置関係を説明する図である。尚、磁場検出手段10の構成は第1実施形態で説明したのと同様である。磁石材料40は、異方性磁石を用いて形成され、表面40aにN極及びS極の磁極領域41,42,43,44,45を直線状に交互に並べて配列しつつ、N極領域41,44,45とS極領域42,43との間に無磁化領域46を有する。具体的には、N極領域41,44,45の幅W1及びS極領域42,43の幅W2は互いに等しく、何れも3mmとした。また、無磁化領域46の幅W3は3mmとした。各領域の高さLは3mmであり、奥行きは5mmである。
図7(a)は、磁石材料40と磁場検出手段10との相対移動方向の変位量と、磁場検出手段10の検出結果(シミュレーション)から算出される磁場角度(deg:°)との関係を示すグラフである。また、図7(b)は、磁石材料40と磁場検出手段10との相対移動方向の変位量と、任意の基準直線からの上記磁場角度の揺らぎ、即ち、磁場角度の非直線性(deg:°)との関係を示すグラフである。
本実施形態のようにN極領域41,44,45とS極領域42,43との間に無磁化領域46を設けたことで、N極領域41,44,45とS極領域42,43との間の無磁化領域46の近傍において、磁場方向が急激に変化しないようになる。その結果、図7(a)及び図7(b)から明らかであるように、変位と磁場角度との関係は第1実施形態に比べて更に線形に近い形となっており、磁場検出手段10が導出した磁場角度から、磁石材料40と磁場検出手段10との相対位置を適切に導出できることが分かる。この結果は、ギャップGが1.5mm〜2.5mmである場合の何れでも共通して得られる。
以上のように、N極領域41,44,45とS極領域42,43との間に無磁化領域46を設けたことで、N極領域41,44,45とS極領域42,43との間の無磁化領域46の近傍での磁場方向の変化が比較的緩やかになる。よって、磁場検出手段10が導出する磁場角度の精度が高くなる。従って、磁場検出手段10は、導出した磁場角度の値に基づいて、両者がどの相対位置にあるのかを正確に導出できる。
<第3実施形態>
第3実施形態の直線変位検出装置は、N極の磁極領域及びS極の磁極領域の配列方向に沿った方向の磁石材料の磁化の強さの分布が正弦波状であることを特徴としている。具体的には、等方性磁石を用い、磁石材料20の内部での磁化の強度分布が相対移動方向に沿って正弦波分布となるように着磁を行っている。例えば、各磁極領域の中心が最も磁化の強度が強く、周辺部へいくにつれて徐々に磁化が弱くなるように着磁している。その結果、後述するように、磁石材料20の外部に形成される磁場の強さの分布も、相対移動方向に沿って正弦波状となる。
磁石材料20以外の装置構成は、第1実施形態の直線変位検出装置と同様である。
第3実施形態の直線変位検出装置は、N極の磁極領域及びS極の磁極領域の配列方向に沿った方向の磁石材料の磁化の強さの分布が正弦波状であることを特徴としている。具体的には、等方性磁石を用い、磁石材料20の内部での磁化の強度分布が相対移動方向に沿って正弦波分布となるように着磁を行っている。例えば、各磁極領域の中心が最も磁化の強度が強く、周辺部へいくにつれて徐々に磁化が弱くなるように着磁している。その結果、後述するように、磁石材料20の外部に形成される磁場の強さの分布も、相対移動方向に沿って正弦波状となる。
磁石材料20以外の装置構成は、第1実施形態の直線変位検出装置と同様である。
図8は、磁石材料20と磁場検出手段10との相対移動方向の位置と、磁石材料20から磁場検出手段10へ向かう方向の磁場成分の強度(シミュレーション結果)との関係を示すグラフである。具体的には、図8(a)は第1実施形態で説明した異方性磁石を用いた場合のシミュレーション結果であり、図8(b)は本実施形態の等方性磁石を用いた場合のシミュレーション結果である。尚、S極領域22とN極領域21とS極領域23との部分による磁場成分のみを例示する。
異方性磁石及び等方性磁石の何れを用いた場合でも、位置が約−3mm〜約+3mmの間、即ち、N極領域(幅W1=6mm)に対応する部分で磁場成分の強度は正となり、位置が約−9mm〜約−3mmの間、及び、約+3mm〜約+9mmの間、即ち、S極領域(幅W2=6mm)に対応する部分で磁場成分の強度は負となる。
磁石材料20が異方性磁石を用いて形成されている場合、図8(a)に示すように、N極領域21,24,25とS極領域22,23との境界付近(位置が−3mm、+3mmの付近)で磁場成分の強度が急激に変化する。他方で、N極領域21,24,25の中央周辺(位置が0mmの周辺)及びS極領域22,23の中央周辺(位置が−6mm、+6mmの周辺)では、位置が変化しても磁場成分の強度が大きく変化していない。つまり、異方性磁石を用いて磁石材料20を形成した場合、磁石材料20から磁場検出手段10へ向かう方向の磁場成分の強度は、位置の変化に応じて一様に変化しない。具体的には、位置の変化に応じて上記磁場成分の強度が大きく変化する領域(N極領域とS極領域との境界付近)と位置の変化に応じて上記磁場成分の強度が大きく変化しない領域(N極領域の中央部分及びS極領域の中央部分)とが存在する。
一方で、磁石材料20が等方性磁石を用いて形成されている場合、図8(b)に示すように、磁場成分の強度の変化の様子は正弦波状になっている。磁石材料20から磁場検出手段10へ向かう方向の磁場成分の強度は、位置の変化に応じて比較的一様に変化している。更に、ギャップGが小さくなっても、位置が変化すると磁場成分の強度が比較的明確に変化する。
よって、等方性磁石を用いて磁石材料20を形成した場合、磁場検出手段10が導出する磁場角度の精度が高くなるので、導出した磁場角度の値に基づいて、両者がどの相対位置にあるのかを正確に導出できる。尚、異方性磁石を用いて磁石材料を形成した場合のように、磁石材料20から磁場検出手段10へ向かう方向の磁場成分の強度が、位置の変化に応じて一様に変化しない場合であっても、補正を行えば磁場角度の導出精度を高めることができる。
また、本実施形態では、等方性磁石を用いて磁石材料20を形成する例について説明したが、磁化の強さの分布が正弦波分布となるように、磁粉を配向させて磁石材料20を形成する手法もあり、得られる効果は等方性磁石を用いた場合と同様である。更に、上記第2実施形態の直線変位検出装置の磁石材料40においても、N極の磁極領域及びS極の磁極領域の配列方向に沿った方向の磁石材料の磁化の強さの分布が正弦波状となるようにしてもよい。
よって、等方性磁石を用いて磁石材料20を形成した場合、磁場検出手段10が導出する磁場角度の精度が高くなるので、導出した磁場角度の値に基づいて、両者がどの相対位置にあるのかを正確に導出できる。尚、異方性磁石を用いて磁石材料を形成した場合のように、磁石材料20から磁場検出手段10へ向かう方向の磁場成分の強度が、位置の変化に応じて一様に変化しない場合であっても、補正を行えば磁場角度の導出精度を高めることができる。
また、本実施形態では、等方性磁石を用いて磁石材料20を形成する例について説明したが、磁化の強さの分布が正弦波分布となるように、磁粉を配向させて磁石材料20を形成する手法もあり、得られる効果は等方性磁石を用いた場合と同様である。更に、上記第2実施形態の直線変位検出装置の磁石材料40においても、N極の磁極領域及びS極の磁極領域の配列方向に沿った方向の磁石材料の磁化の強さの分布が正弦波状となるようにしてもよい。
<第4実施形態>
第4実施形態で説明するのは、図1に示した磁石材料20のN極領域21,24,25の幅W1及びS極領域22,23の幅W2を第1実施形態で説明した場合よりも狭くした直線変位検出装置の例である。具体的には、N極領域21,24,25の幅W1を2mmとし、S極領域22,23の幅W2を2mmとした。よって、この直線変位検出装置では、4mmの範囲内での直線変位(即ち、磁石材料20と磁場検出手段10との相対移動)を検出できるという高精度なものである。但し、各磁極領域が小さくなる分、磁極領域の外部に形成される磁場も小さくなるので、その小さい磁場を磁場検出手段10で正確に検出する必要がある。
第4実施形態で説明するのは、図1に示した磁石材料20のN極領域21,24,25の幅W1及びS極領域22,23の幅W2を第1実施形態で説明した場合よりも狭くした直線変位検出装置の例である。具体的には、N極領域21,24,25の幅W1を2mmとし、S極領域22,23の幅W2を2mmとした。よって、この直線変位検出装置では、4mmの範囲内での直線変位(即ち、磁石材料20と磁場検出手段10との相対移動)を検出できるという高精度なものである。但し、各磁極領域が小さくなる分、磁極領域の外部に形成される磁場も小さくなるので、その小さい磁場を磁場検出手段10で正確に検出する必要がある。
図9は、このような磁石材料20を用いて、磁石材料20と磁場検出手段10とを相対移動させながら磁場検出手段10によって検出する磁束密度のグラフ(シミュレーション結果)である。この測定は、磁石材料20の表面20aと磁場検出手段10のホール素子13とのギャップGを変化させて行ったので、その結果も併せて示す。図9の横軸には、磁石材料20と磁場検出手段10との相対移動方向の変位量を示す。尚、軟磁性プレート12の中心と磁石材料20のN極領域21の中心とが互いに正面に相対する状態を原点(変位量=0)とする。図9の縦軸には、磁場検出手段10によって検出される磁束密度を示す。
磁場検出手段10にとって検出に望ましい磁束密度範囲は約0.02T〜約0.07Tである。図9のグラフから明らかであるように、直線変位検出装置の直線変位の検出対象範囲である4mm(図中の−2mm〜+2mm)の範囲内で、磁束密度はほぼ均一である。よって、図9から明らかであるように、第4実施形態の磁場検出手段10を用いた場合、ギャップGが1.6mm〜2.0mmの範囲であれば上記検出に望ましい磁束密度範囲内の磁束密度を検出できる。従って、直線変位を高精度に検出可能な直線変位検出装置が得られた。
<第5実施形態>
第5実施形態で説明するのは、磁石材料の端部以外に配列された磁極領域の配列方向に沿った方向の幅が互いに同じであり、磁石材料の端部に配列された磁極領域の配列方向に沿った方向の幅が、端部以外に配列された磁極領域の配列方向に沿った方向の幅よりも小さくされた直線変位検出装置の例である。
以下の説明では、異方性磁石を用いて磁石材料が形成される場合について説明するが、上記第3実施形態で説明したような、N極の磁極領域及びS極の磁極領域の配列方向に沿った方向の磁石材料の磁化の強さの分布が正弦波状である磁石材料においても、磁石材料の端部以外に配列された磁極領域の配列方向に沿った方向の幅が互いに同じであり、磁石材料の端部に配列された磁極領域の配列方向に沿った方向の幅が、端部以外に配列された磁極領域の配列方向に沿った方向の幅よりも小さくなるようにしてもよい。
第5実施形態で説明するのは、磁石材料の端部以外に配列された磁極領域の配列方向に沿った方向の幅が互いに同じであり、磁石材料の端部に配列された磁極領域の配列方向に沿った方向の幅が、端部以外に配列された磁極領域の配列方向に沿った方向の幅よりも小さくされた直線変位検出装置の例である。
以下の説明では、異方性磁石を用いて磁石材料が形成される場合について説明するが、上記第3実施形態で説明したような、N極の磁極領域及びS極の磁極領域の配列方向に沿った方向の磁石材料の磁化の強さの分布が正弦波状である磁石材料においても、磁石材料の端部以外に配列された磁極領域の配列方向に沿った方向の幅が互いに同じであり、磁石材料の端部に配列された磁極領域の配列方向に沿った方向の幅が、端部以外に配列された磁極領域の配列方向に沿った方向の幅よりも小さくなるようにしてもよい。
〔磁極領域が3個の場合〕
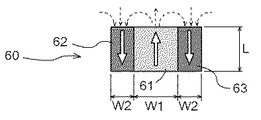
図10は、3個の磁極領域を有する磁石材料60を説明する図である。図示するように、磁石材料60の端部にはS極領域(S極の磁極領域)62,63(幅W2)が配列され、端部以外にはN極領域(N極の磁極領域)61(幅W1)が配列されている。磁場検出手段10などの他の装置構成は上記実施形態と同様である。
図10は、3個の磁極領域を有する磁石材料60を説明する図である。図示するように、磁石材料60の端部にはS極領域(S極の磁極領域)62,63(幅W2)が配列され、端部以外にはN極領域(N極の磁極領域)61(幅W1)が配列されている。磁場検出手段10などの他の装置構成は上記実施形態と同様である。
以下に、図10の磁石材料60において、端部のS極領域62,63の幅:W2=1/2×W1の場合について説明する。
図11(a)は、図10の磁石材料60において、端部のS極領域62,63の幅:W2=1/2×W1であるような磁石材料60を用いて、磁石材料60と磁場検出手段10とを相対移動させながら磁場検出手段10によって検出する磁束密度のグラフ(シミュレーション結果)である。但し、W1=2mm、W2=1mmである。また、各磁極領域の高さLは3mmであり、奥行きは5mmである。よって、この直線変位検出装置は、4mmの範囲内(図中の−2mm〜+2mmの範囲内)での直線変位を検出可能に構成されている。また、この測定は、磁石材料60の表面60aと磁場検出手段10のホール素子13とのギャップGを変化させて行ったので、その結果も併せて示す。図11(a)の横軸には、磁石材料60と磁場検出手段10との相対移動方向の変位量を示す。尚、軟磁性プレート12の中心と磁石材料60のN極領域61の中心とが互いに正面に相対する状態を原点(変位量=0)とする。図11(a)の縦軸には、磁場検出手段10によって検出される磁束密度を示す。
図11(a)は、図10の磁石材料60において、端部のS極領域62,63の幅:W2=1/2×W1であるような磁石材料60を用いて、磁石材料60と磁場検出手段10とを相対移動させながら磁場検出手段10によって検出する磁束密度のグラフ(シミュレーション結果)である。但し、W1=2mm、W2=1mmである。また、各磁極領域の高さLは3mmであり、奥行きは5mmである。よって、この直線変位検出装置は、4mmの範囲内(図中の−2mm〜+2mmの範囲内)での直線変位を検出可能に構成されている。また、この測定は、磁石材料60の表面60aと磁場検出手段10のホール素子13とのギャップGを変化させて行ったので、その結果も併せて示す。図11(a)の横軸には、磁石材料60と磁場検出手段10との相対移動方向の変位量を示す。尚、軟磁性プレート12の中心と磁石材料60のN極領域61の中心とが互いに正面に相対する状態を原点(変位量=0)とする。図11(a)の縦軸には、磁場検出手段10によって検出される磁束密度を示す。
図11(a)に示すように、ギャップGを0.8mm〜2.4mmの間で変化させると、ギャップGが大きくなるにつれて磁場検出手段10で検出可能な磁束密度が小さくなっている。本実施形態で用いる磁場検出手段10にとって検出に望ましい磁束密度範囲は約0.02T〜約0.07Tである。図11(a)のグラフから明らかであるように、ギャップGが小さくなると、直線変位検出装置の直線変位の検出対象範囲である4mm(図中の−2mm〜+2mm)の範囲内で、磁束密度はほぼ均一である。よって、この場合、ギャップGが1.8mm〜2.2mmの範囲で上記検出に望ましい磁束密度範囲内の磁束密度を検出できる。
図11(b)は、磁石材料60と磁場検出手段10との相対移動方向の変位量と、磁場検出手段10の検出結果(シミュレーション)から算出される磁場角度(deg:°)との関係を示すグラフである。図11(b)から明らかであるように、変位と磁場角度との関係はほぼ線形となっており、磁場検出手段10が導出した磁場角度から、磁石材料60と磁場検出手段10との相対位置を適切に導出できることが分かる。
次に、図10の磁石材料60において、端部のS極領域62,63の幅:W2=2/3×W1の場合について説明する。
図12(a)は、図10の磁石材料60において、端部のS極領域62,63の幅:W2=2/3×W1であるような磁石材料60を用いて、磁石材料60と磁場検出手段10とを相対移動させながら磁場検出手段10によって検出する磁束密度のグラフ(シミュレーション結果)である。但し、W1=2mm、W2=1.33である。よって、この直線変位検出装置は、4mmの範囲内(図中の−2mm〜+2mmの範囲内)での直線変位を検出可能に構成されている。また、この測定は、磁石材料60の表面60aと磁場検出手段10のホール素子13とのギャップGを変化させて行ったので、その結果も併せて示す。図12(a)の横軸には、磁石材料60と磁場検出手段10との相対移動方向の変位量を示す。尚、軟磁性プレート12の中心と磁石材料60のN極領域61の中心とが互いに正面に相対する状態を原点(変位量=0)とする。図12(a)の縦軸には、磁場検出手段10によって検出される磁束密度を示す。
図12(a)は、図10の磁石材料60において、端部のS極領域62,63の幅:W2=2/3×W1であるような磁石材料60を用いて、磁石材料60と磁場検出手段10とを相対移動させながら磁場検出手段10によって検出する磁束密度のグラフ(シミュレーション結果)である。但し、W1=2mm、W2=1.33である。よって、この直線変位検出装置は、4mmの範囲内(図中の−2mm〜+2mmの範囲内)での直線変位を検出可能に構成されている。また、この測定は、磁石材料60の表面60aと磁場検出手段10のホール素子13とのギャップGを変化させて行ったので、その結果も併せて示す。図12(a)の横軸には、磁石材料60と磁場検出手段10との相対移動方向の変位量を示す。尚、軟磁性プレート12の中心と磁石材料60のN極領域61の中心とが互いに正面に相対する状態を原点(変位量=0)とする。図12(a)の縦軸には、磁場検出手段10によって検出される磁束密度を示す。
図12(a)に示すように、ギャップGを0.8mm〜2.4mmの間で変化させると、ギャップGが大きくなるにつれて磁場検出手段10で検出可能な磁束密度が小さくなっている。本実施形態で用いる磁場検出手段10にとって検出に望ましい磁束密度範囲は約0.02T〜約0.07Tである。図12(a)のグラフから明らかであるように、ギャップGが小さくなると、直線変位検出装置の直線変位の検出対象範囲である4mm(図中の−2mm〜+2mm)の範囲内で、磁束密度はほぼ均一である。よって、この場合、ギャップGが1.6mm〜2.4mmの範囲で上記検出に望ましい磁束密度範囲内の磁束密度を検出できる。
図12(b)は、磁石材料60と磁場検出手段10との相対移動方向の変位量と、磁場検出手段10の検出結果(シミュレーション)から算出される磁場角度(deg:°)との関係を示すグラフである。図12(b)から明らかであるように、変位と磁場角度との関係はほぼ線形となっており、磁場検出手段10が導出した磁場角度から、磁石材料60と磁場検出手段10との相対位置を適切に導出できることが分かる。
一方で、図10の磁石材料60において端部のS極領域62,63の幅:W2=W1の場合、端部のS極領域62,63による磁場が優勢となるため、磁石材料60の外部に形成される磁場の分布が各磁極領域の周辺で不均一になる。図13(a)は、図10の磁石材料60において、端部のS極領域62,63の幅:W2=W1であるような磁石材料60を用いて、磁石材料60と磁場検出手段10とを相対移動させながら磁場検出手段10によって検出する磁束密度のグラフ(シミュレーション結果)である。但し、W1=W2=2mmである。
本実施形態で用いる磁場検出手段10にとって検出に望ましい磁束密度範囲は約0.02T〜約0.07Tである。図13(a)のグラフから明らかであるように、直線変位検出装置の直線変位の検出対象範囲である4mm(図中の−2mm〜+2mm)の範囲内で、磁束密度は大きく変動して、均一となっていない。よって、この場合、ギャップGが2.0mmである場合のみが、上記検出に望ましい磁束密度範囲内の磁束密度を検出できることになる。
図13(b)は、磁石材料60と磁場検出手段10との相対移動方向の変位量と、磁場検出手段10の検出結果(シミュレーション)から算出される磁場角度(deg:°)との関係を示すグラフである。図13(b)から明らかであるように、変位と磁場角度との関係は線形とは言えない。
以上のように、図10の磁石材料60において、端部のS極領域62,63の幅:W2=1/2×W1の場合と端部のS極領域62,63の幅:W2=2/3×W1の場合とでは、直線変位検出装置の直線変位の検出対象範囲である4mm(図中の−2mm〜+2mm)の範囲内で、磁束密度はほぼ均一となる。つまり、端部に設けられたS極領域62,63の大きさを小さくすることで、そのS極領域62,63による磁場が優勢となることが抑制される。よって、磁石材料60の端部以外に配列された磁極領域の配列方向に沿った方向の幅は互いに同じであり、磁石材料60の端部に配列された磁極領域の配列方向に沿った方向の幅は、磁石材料60の端部以外に配列された磁極領域の配列方向に沿った方向の幅の1/2〜2/3であるようにすれば、磁石材料60の外部に形成される磁場分布が不均一になることを抑制できる。
〔磁極領域が4個の場合〕
図14は、4個の磁極領域を有する磁石材料80を説明する図である。図示するように、磁石部材の端部にはN極領域(N極の磁極領域)83(幅W5)及びS極領域(S極の磁極領域)84(幅W4)が配列され、端部以外にはN極領域81(幅W1)及びS極領域82(幅W2)が配列されている。磁場検出手段10などの他の装置構成は上記実施形態と同様である。
図14は、4個の磁極領域を有する磁石材料80を説明する図である。図示するように、磁石部材の端部にはN極領域(N極の磁極領域)83(幅W5)及びS極領域(S極の磁極領域)84(幅W4)が配列され、端部以外にはN極領域81(幅W1)及びS極領域82(幅W2)が配列されている。磁場検出手段10などの他の装置構成は上記実施形態と同様である。
以下に、図14の磁石材料80において、W4=2/3×W1(又はW2)、W5=2/3×W1(又はW2)の場合について説明する。
図15(a)は、図14の磁石材料80用いて、磁石材料80と磁場検出手段10とを相対移動させながら磁場検出手段10によって検出する磁束密度のグラフ(シミュレーション結果)である。但し、W1=2mm、W2=2mm、W4=1.33mm、W5=1.33mmである。また、各磁極領域の高さLは3mmであり、奥行きは5mmである。よって、この直線変位検出装置は、4mmの範囲内(図中の−2mm〜+2mmの範囲内)での直線変位を検出可能に構成されている。また、この測定は、磁石材料80の表面80aと磁場検出手段10のホール素子13とのギャップGを変化させて行ったので、その結果も併せて示す。図15(a)の横軸には、磁石材料80と磁場検出手段10との相対移動方向の変位量を示す。尚、軟磁性プレート12の中心と磁石材料80のN極領域81とS極領域82との境界部分が互いに正面に相対する状態を原点(変位量=0)とする。図15(a)の縦軸には、磁場検出手段10によって検出される磁束密度を示す。
図15(a)は、図14の磁石材料80用いて、磁石材料80と磁場検出手段10とを相対移動させながら磁場検出手段10によって検出する磁束密度のグラフ(シミュレーション結果)である。但し、W1=2mm、W2=2mm、W4=1.33mm、W5=1.33mmである。また、各磁極領域の高さLは3mmであり、奥行きは5mmである。よって、この直線変位検出装置は、4mmの範囲内(図中の−2mm〜+2mmの範囲内)での直線変位を検出可能に構成されている。また、この測定は、磁石材料80の表面80aと磁場検出手段10のホール素子13とのギャップGを変化させて行ったので、その結果も併せて示す。図15(a)の横軸には、磁石材料80と磁場検出手段10との相対移動方向の変位量を示す。尚、軟磁性プレート12の中心と磁石材料80のN極領域81とS極領域82との境界部分が互いに正面に相対する状態を原点(変位量=0)とする。図15(a)の縦軸には、磁場検出手段10によって検出される磁束密度を示す。
図15(a)に示すように、ギャップGを0.8mm〜2.4mmの間で変化させると、ギャップGが大きくなるにつれて磁場検出手段10で検出可能な磁束密度が小さくなっている。本実施形態で用いる磁場検出手段10にとって検出に望ましい磁束密度範囲は約0.02T〜約0.07Tである。図15(a)のグラフから明らかであるように、直線変位検出装置の直線変位の検出対象範囲である4mm(図中の−2mm〜+2mm)の範囲内で、磁束密度はほぼ均一である。よって、この場合、ギャップGが1.6mm〜2.0mmの範囲で上記検出に望ましい磁束密度範囲内の磁束密度を検出できる。
図15(b)は、磁石材料80と磁場検出手段10との相対移動方向の変位量と、磁場検出手段10の検出結果(シミュレーション)から算出される磁場角度(deg:°)との関係を示すグラフである。図15(b)から明らかであるように、変位と磁場角度との関係はほぼ線形となっており、磁場検出手段10が導出した磁場角度から、磁石材料80と磁場検出手段10との相対位置を適切に導出できることが分かる。
〔磁極領域が5個の場合〕
図16は、5個の磁極領域を有する磁石材料20を説明する図である。図示するように、磁石材料20の端部にはN極領域24,25(幅W5)が配列され、端部以外にはN極領域21(幅W1)及びS極領域22,23(幅W2)が配列されている。磁場検出手段10などの他の装置構成は上記実施形態と同様である。
図16は、5個の磁極領域を有する磁石材料20を説明する図である。図示するように、磁石材料20の端部にはN極領域24,25(幅W5)が配列され、端部以外にはN極領域21(幅W1)及びS極領域22,23(幅W2)が配列されている。磁場検出手段10などの他の装置構成は上記実施形態と同様である。
以下に、図16の磁石材料20において、W5=2/3×W1(又はW2)の場合について説明する。
図17(a)は、図16の磁石材料20を用いて、磁石材料20と磁場検出手段10とを相対移動させながら磁場検出手段10によって検出する磁束密度のグラフ(シミュレーション結果)である。但し、W1=2mm、W2=2mm、W5=1.33mmである。また、各磁極領域の高さLは3mmであり、奥行きは5mmである。よって、この直線変位検出装置は、4mmの範囲内(図中の−2mm〜+2mmの範囲内)での直線変位を検出可能に構成されている。また、この測定は、磁石材料20の表面20aと磁場検出手段10のホール素子13とのギャップGを変化させて行ったので、その結果も併せて示す。図17(a)の横軸には、磁石材料20と磁場検出手段10との相対移動方向の変位量を示す。尚、軟磁性プレート12の中心と磁石材料20のN極領域21の中心が互いに正面に相対する状態を原点(変位量=0)とする。図17(a)の縦軸には、磁場検出手段10によって検出される磁束密度を示す。
図17(a)は、図16の磁石材料20を用いて、磁石材料20と磁場検出手段10とを相対移動させながら磁場検出手段10によって検出する磁束密度のグラフ(シミュレーション結果)である。但し、W1=2mm、W2=2mm、W5=1.33mmである。また、各磁極領域の高さLは3mmであり、奥行きは5mmである。よって、この直線変位検出装置は、4mmの範囲内(図中の−2mm〜+2mmの範囲内)での直線変位を検出可能に構成されている。また、この測定は、磁石材料20の表面20aと磁場検出手段10のホール素子13とのギャップGを変化させて行ったので、その結果も併せて示す。図17(a)の横軸には、磁石材料20と磁場検出手段10との相対移動方向の変位量を示す。尚、軟磁性プレート12の中心と磁石材料20のN極領域21の中心が互いに正面に相対する状態を原点(変位量=0)とする。図17(a)の縦軸には、磁場検出手段10によって検出される磁束密度を示す。
図17(a)に示すように、ギャップGを0.8mm〜2.4mmの間で変化させると、ギャップGが大きくなるにつれて磁場検出手段10で検出可能な磁束密度が小さくなっている。本実施形態で用いる磁場検出手段10にとって検出に望ましい磁束密度範囲は約0.02T〜約0.07Tである。図17(a)のグラフから明らかであるように、直線変位検出装置の直線変位の検出対象範囲である4mm(図中の−2mm〜+2mm)の範囲内で、磁束密度はほぼ均一である。よって、この場合、ギャップGが1.6mm〜2.2mmの範囲で上記検出に望ましい磁束密度範囲内の磁束密度を検出できる。
図17(b)は、磁石材料20と磁場検出手段10との相対移動方向の変位量と、磁場検出手段10の検出結果(シミュレーション)から算出される磁場角度(deg:°)との関係を示すグラフである。図17(b)から明らかであるように、変位と磁場角度との関係はほぼ線形となっており、磁場検出手段10が導出した磁場角度から、磁石材料20と磁場検出手段10との相対位置を適切に導出できることが分かる。
以上のように、磁石材料を構成する磁極領域の数に拘わらず、磁石材料の端部以外に配列された磁極領域の配列方向に沿った方向の幅は互いに同じであり、磁石材料の端部に配列された磁極領域の配列方向に沿った方向の幅は、磁石材料の端部以外に配列された磁極領域の配列方向に沿った方向の幅の1/2〜2/3であるようにすれば、磁石材料の外部に形成される磁場分布が不均一になることを抑制できる。
<別実施形態>
<1>
上記実施形態では、磁石材料を構成する磁極領域の具体的な寸法を挙げて説明を行ったが、各磁石材料の寸法は、要求される直線変位の検出対象範囲、磁力の強さなどの様々な条件に応じて適宜変更可能である。
<1>
上記実施形態では、磁石材料を構成する磁極領域の具体的な寸法を挙げて説明を行ったが、各磁石材料の寸法は、要求される直線変位の検出対象範囲、磁力の強さなどの様々な条件に応じて適宜変更可能である。
<2>
上記実施形態では、一次元方向に延びた磁石材料を用いて、磁石材料と磁場検出手段との一次元方向の相対位置を検出する例について説明したが、二次元方向(例えば、十字型)に延びた磁石材料を用いて、磁石材料と磁場検出手段との二次元方向の相対位置を検出するようにも変更可能である。
上記実施形態では、一次元方向に延びた磁石材料を用いて、磁石材料と磁場検出手段との一次元方向の相対位置を検出する例について説明したが、二次元方向(例えば、十字型)に延びた磁石材料を用いて、磁石材料と磁場検出手段との二次元方向の相対位置を検出するようにも変更可能である。
10 磁場検出手段
11 基板
12 軟磁性プレート
12a 感磁面
13 ホール素子
14 チップ
20 磁石材料
20a 表面
21,24,25 N極領域(N極の磁極領域)
22,23 S極領域(S極の磁極領域)
30 直線変位検出装置
40 磁石材料
41,44,45 N極領域(N極の磁極領域)
42,43 S極領域(S極の磁極領域)
46 無磁化領域
50 直線変位検出装置
60 磁石材料
61 N極領域(N極の磁極領域)
62,63 S極領域(S極の磁極領域)
80 磁石材料
81,83 N極領域(N極の磁極領域)
82,84 S極領域(S極の磁極領域)
11 基板
12 軟磁性プレート
12a 感磁面
13 ホール素子
14 チップ
20 磁石材料
20a 表面
21,24,25 N極領域(N極の磁極領域)
22,23 S極領域(S極の磁極領域)
30 直線変位検出装置
40 磁石材料
41,44,45 N極領域(N極の磁極領域)
42,43 S極領域(S極の磁極領域)
46 無磁化領域
50 直線変位検出装置
60 磁石材料
61 N極領域(N極の磁極領域)
62,63 S極領域(S極の磁極領域)
80 磁石材料
81,83 N極領域(N極の磁極領域)
82,84 S極領域(S極の磁極領域)
Claims (4)
- 表面にN極及びS極の磁極領域を直線状に交互に並べて配列した磁石材料と、
磁場を検出する感磁面を有し、当該感磁面が前記磁石材料の前記表面と対面して配置される磁場検出手段とを備え、
前記磁石材料と前記磁場検出手段とは、前記磁石材料の前記N極の磁極領域及び前記S極の磁極領域の配列方向に沿って平行に相対移動可能である直線変位検出装置。 - 前記N極の磁極領域及び前記S極の磁極領域の配列方向に沿った方向の前記磁石材料の磁化の強さの分布は正弦波状である請求項1記載の直線変位検出装置。
- 前記磁石材料は、前記N極の磁極領域と前記S極の磁極領域との間に無磁化領域を有する請求項1又は2記載の直線変位検出装置。
- 前記磁石材料の端部以外に配列された前記磁極領域の前記配列方向に沿った方向の幅は互いに同じであり、
前記磁石材料の前記端部に配列された前記磁極領域の前記配列方向に沿った方向の幅は、前記磁石材料の端部以外に配列された前記磁極領域の前記配列方向に沿った方向の幅の1/2〜2/3である請求項1又は2記載の直線変位検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008030827A JP2009192261A (ja) | 2008-02-12 | 2008-02-12 | 直線変位検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008030827A JP2009192261A (ja) | 2008-02-12 | 2008-02-12 | 直線変位検出装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009192261A true JP2009192261A (ja) | 2009-08-27 |
Family
ID=41074423
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008030827A Pending JP2009192261A (ja) | 2008-02-12 | 2008-02-12 | 直線変位検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009192261A (ja) |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011232060A (ja) * | 2010-04-23 | 2011-11-17 | Tdk Corp | 磁気式位置検出装置 |
| JP2012098190A (ja) * | 2010-11-03 | 2012-05-24 | Aisin Seiki Co Ltd | 直線変位検出装置 |
| JP2012208112A (ja) * | 2011-03-11 | 2012-10-25 | Alps Electric Co Ltd | 位置センサ、磁石部材及び磁石部材の製造方法 |
| JP2014163816A (ja) * | 2013-02-26 | 2014-09-08 | Seiko Epson Corp | 磁気式エンコーダー、ロボット及び移動体 |
| JP5629007B2 (ja) * | 2011-07-29 | 2014-11-19 | 旭化成エレクトロニクス株式会社 | 磁場計測装置 |
| WO2015136690A1 (ja) * | 2014-03-14 | 2015-09-17 | 三菱電機株式会社 | 磁気式位置検出装置、磁気式位置検出方法 |
| EP2496914B1 (fr) | 2009-11-06 | 2016-08-03 | Moving Magnet Technologies | Capteur de position magnetique bidirectionnel à rotation de champ |
| JP2018013461A (ja) * | 2016-07-23 | 2018-01-25 | メレキシス テクノロジーズ エス エー | 変位検出装置及び無段変速装置 |
| JP2019143991A (ja) * | 2018-02-16 | 2019-08-29 | Tdk株式会社 | 磁気センサシステムおよび磁気スケール |
| CN114577099A (zh) * | 2020-11-16 | 2022-06-03 | 深圳市万普拉斯科技有限公司 | 位置检测系统、镜头、变焦方法及终端 |
| CN115210536A (zh) * | 2020-03-10 | 2022-10-18 | 三菱电机株式会社 | 磁式线性位置检测器 |
| JP2023001656A (ja) * | 2021-06-21 | 2023-01-06 | Tdk株式会社 | 磁気センサと磁気センサを用いたブレーキシステム及びステアリングシステム |
| US11555714B2 (en) | 2018-10-15 | 2023-01-17 | Electricfil Automotive | Method and sensor system for determining a relative angular position between two parts, and method for manufacturing a magnetic body |
| US11668587B2 (en) | 2018-06-15 | 2023-06-06 | Electricfil Automotive | Method for determining a relative angular position between two parts |
| TWI836917B (zh) * | 2022-03-07 | 2024-03-21 | 日商三菱電機股份有限公司 | 磁性編碼器 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0396809A (ja) * | 1989-09-08 | 1991-04-22 | Shinko Electric Co Ltd | リニアエンコーダ |
| JPH08275500A (ja) * | 1995-03-31 | 1996-10-18 | Minolta Co Ltd | リニアモータ |
| JPH116744A (ja) * | 1997-06-16 | 1999-01-12 | Sankyo Seiki Mfg Co Ltd | エンコーダ装置 |
-
2008
- 2008-02-12 JP JP2008030827A patent/JP2009192261A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0396809A (ja) * | 1989-09-08 | 1991-04-22 | Shinko Electric Co Ltd | リニアエンコーダ |
| JPH08275500A (ja) * | 1995-03-31 | 1996-10-18 | Minolta Co Ltd | リニアモータ |
| JPH116744A (ja) * | 1997-06-16 | 1999-01-12 | Sankyo Seiki Mfg Co Ltd | エンコーダ装置 |
Cited By (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2496914B1 (fr) | 2009-11-06 | 2016-08-03 | Moving Magnet Technologies | Capteur de position magnetique bidirectionnel à rotation de champ |
| JP2011232060A (ja) * | 2010-04-23 | 2011-11-17 | Tdk Corp | 磁気式位置検出装置 |
| JP2012098190A (ja) * | 2010-11-03 | 2012-05-24 | Aisin Seiki Co Ltd | 直線変位検出装置 |
| JP2012208112A (ja) * | 2011-03-11 | 2012-10-25 | Alps Electric Co Ltd | 位置センサ、磁石部材及び磁石部材の製造方法 |
| JP5629007B2 (ja) * | 2011-07-29 | 2014-11-19 | 旭化成エレクトロニクス株式会社 | 磁場計測装置 |
| JP2014163816A (ja) * | 2013-02-26 | 2014-09-08 | Seiko Epson Corp | 磁気式エンコーダー、ロボット及び移動体 |
| CN106104211B (zh) * | 2014-03-14 | 2018-11-13 | 三菱电机株式会社 | 磁力式位置检测装置、磁力式位置检测方法 |
| CN106104211A (zh) * | 2014-03-14 | 2016-11-09 | 三菱电机株式会社 | 磁力式位置检测装置、磁力式位置检测方法 |
| US20160334243A1 (en) * | 2014-03-14 | 2016-11-17 | Mitsubishi Electric Corporation | Magnetic position detection device and magnetic position detection method |
| JPWO2015136690A1 (ja) * | 2014-03-14 | 2017-04-06 | 三菱電機株式会社 | 磁気式位置検出装置、磁気式位置検出方法 |
| US10066966B2 (en) | 2014-03-14 | 2018-09-04 | Mitsubishi Electric Corporation | Magnetic position detection device and magnetic position detection method |
| WO2015136690A1 (ja) * | 2014-03-14 | 2015-09-17 | 三菱電機株式会社 | 磁気式位置検出装置、磁気式位置検出方法 |
| DE112014006465B4 (de) | 2014-03-14 | 2022-03-03 | Mitsubishi Electric Corporation | Magnetische Vorrichtung zur Positionserfassung und Verfahren zur magnetischen Positionserfassung |
| JP2018013461A (ja) * | 2016-07-23 | 2018-01-25 | メレキシス テクノロジーズ エス エー | 変位検出装置及び無段変速装置 |
| JP2019143991A (ja) * | 2018-02-16 | 2019-08-29 | Tdk株式会社 | 磁気センサシステムおよび磁気スケール |
| US11668587B2 (en) | 2018-06-15 | 2023-06-06 | Electricfil Automotive | Method for determining a relative angular position between two parts |
| US11555714B2 (en) | 2018-10-15 | 2023-01-17 | Electricfil Automotive | Method and sensor system for determining a relative angular position between two parts, and method for manufacturing a magnetic body |
| CN115210536A (zh) * | 2020-03-10 | 2022-10-18 | 三菱电机株式会社 | 磁式线性位置检测器 |
| CN114577099A (zh) * | 2020-11-16 | 2022-06-03 | 深圳市万普拉斯科技有限公司 | 位置检测系统、镜头、变焦方法及终端 |
| CN114577099B (zh) * | 2020-11-16 | 2023-11-28 | 深圳市万普拉斯科技有限公司 | 位置检测系统、镜头、变焦方法及终端 |
| JP2023001656A (ja) * | 2021-06-21 | 2023-01-06 | Tdk株式会社 | 磁気センサと磁気センサを用いたブレーキシステム及びステアリングシステム |
| JP7507729B2 (ja) | 2021-06-21 | 2024-06-28 | Tdk株式会社 | 磁気センサと磁気センサを用いたブレーキシステム及びステアリングシステム |
| US12043306B2 (en) | 2021-06-21 | 2024-07-23 | Tdk Corporation | Magnetic sensor, brake system using the same, and steering system using the same |
| TWI836917B (zh) * | 2022-03-07 | 2024-03-21 | 日商三菱電機股份有限公司 | 磁性編碼器 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009192261A (ja) | 直線変位検出装置 | |
| JP6463789B2 (ja) | 磁気角度位置センサ | |
| JP5245114B2 (ja) | 位置検出装置 | |
| US9279866B2 (en) | Magnetic sensor | |
| US8102172B2 (en) | Position detector including magnetoresistive elements | |
| WO2010098190A1 (ja) | 回転検出装置 | |
| US10215550B2 (en) | Methods and apparatus for magnetic sensors having highly uniform magnetic fields | |
| KR20180056712A (ko) | 위치 검지 장치 | |
| US7969145B2 (en) | Position detecting device with a magnetoresistive element | |
| JP2012098190A (ja) | 直線変位検出装置 | |
| US8203406B2 (en) | Magnetic having linear magnetic flux density | |
| US20150145506A1 (en) | Magnetic sensor | |
| KR20120135028A (ko) | 자석 및 상기 자석을 사용한 자기 검출 장치 | |
| US10215588B2 (en) | Position detecting device and structure for using position detecting device | |
| JP2008039632A (ja) | 回転センサ装置および回転センサ装置の調整方法 | |
| JP6213536B2 (ja) | 磁場検出装置及び回転検出装置 | |
| US7800356B2 (en) | Position detection apparatus using magnetoresistive effect element | |
| JP4863167B2 (ja) | 磁石構造体及びこれを用いた位置検出装置 | |
| JP5012130B2 (ja) | 角度センサ | |
| JP2008170273A (ja) | 磁気抵抗効果素子を用いた位置検知装置 | |
| JP4863166B2 (ja) | 磁石構造体及びこれを用いた位置検出装置 | |
| JP2011169715A (ja) | 位置検出機構 | |
| WO2016047044A1 (ja) | 位置検出装置及び手ぶれ補正装置 | |
| JP2024132867A (ja) | 永久磁石を備えた位置測定装置 | |
| JP2020165940A (ja) | 磁性体検出センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120514 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120607 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121011 |