JP2007126258A - 物品移載装置及び物品収納設備 - Google Patents
物品移載装置及び物品収納設備 Download PDFInfo
- Publication number
- JP2007126258A JP2007126258A JP2005320961A JP2005320961A JP2007126258A JP 2007126258 A JP2007126258 A JP 2007126258A JP 2005320961 A JP2005320961 A JP 2005320961A JP 2005320961 A JP2005320961 A JP 2005320961A JP 2007126258 A JP2007126258 A JP 2007126258A
- Authority
- JP
- Japan
- Prior art keywords
- article
- pair
- bodies
- state
- holding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Landscapes
- Warehouses Or Storage Devices (AREA)
Abstract
【課題】物品移載にかかる時間の短縮化を図ることができる物品移載装置の提供。
【解決手段】本体載置部23から移載対象箇所4,8に物品Bを移載するときには、挟持状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させたのち、挟持状態から解除状態に切り換え、その後解除状態に維持して一対の挟持体を突出位置から引退位置に引退作動させるべく、挟持状態切換手段の作動及び出退駆動手段の作動を制御し、且つ、一対の挟持体24の接近離間方向での位置を検出する位置検出手段の位置情報、及び、本体載置部23から移載対象箇所4,8に移載する物品B1,B2の一対の挟持体24の接近離間方向における幅情報に基づいて、一対の挟持体24をその物品B1,B2から設定距離G離れた位置に離間させる形態で挟持状態から解除状態に切り換えるべく、挟持状態切換手段の作動を制御するように構成されている。
【選択図】図10
【解決手段】本体載置部23から移載対象箇所4,8に物品Bを移載するときには、挟持状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させたのち、挟持状態から解除状態に切り換え、その後解除状態に維持して一対の挟持体を突出位置から引退位置に引退作動させるべく、挟持状態切換手段の作動及び出退駆動手段の作動を制御し、且つ、一対の挟持体24の接近離間方向での位置を検出する位置検出手段の位置情報、及び、本体載置部23から移載対象箇所4,8に移載する物品B1,B2の一対の挟持体24の接近離間方向における幅情報に基づいて、一対の挟持体24をその物品B1,B2から設定距離G離れた位置に離間させる形態で挟持状態から解除状態に切り換えるべく、挟持状態切換手段の作動を制御するように構成されている。
【選択図】図10
Description
本発明は、水平方向に接近離間自在で且つ物品を載置支持する本体載置部側に引退させた引退位置と外部の移載対象箇所側に突出させた突出位置とに出退自在な一対の挟持体と、前記一対の挟持体を接近作動させて物品を両横から挟持する挟持状態と前記一対の挟持体を離間作動させて物品に対する挟持を解除する解除状態とに切換自在な挟持状態切換手段と、前記一対の挟持体を引退位置と突出位置とに出退駆動させる出退駆動手段と、前記挟持状態切換手段の作動及び前記出退駆動手段の作動を制御する制御手段とが設けられ、前記制御手段が、移載対象箇所から前記本体載置部に物品を移載するときには、前記解除状態に維持して前記一対の挟持体を引退位置から突出位置に突出作動させたのち、前記解除状態から前記挟持状態に切り換え、その後前記挟持状態に維持して前記一対の挟持体を突出位置から引退位置に引退作動させるべく、前記挟持状態切換手段の作動及び前記出退駆動手段の作動を制御するように構成され、且つ、前記本体載置部から移載対象箇所に物品を移載するときには、前記挟持状態に維持して前記一対の挟持体を引退位置から突出位置に突出作動させたのち、前記挟持状態から前記解除状態に切り換え、その後前記解除状態に維持して前記一対の挟持体を突出位置から引退位置に引退作動させるべく、前記挟持状態切換手段の作動及び前記出退駆動手段の作動を制御するように構成されている物品移載装置に関する。
上記のような物品移載装置は、一対の挟持体にて物品を両横から挟持してその一対の挟持体を出退させることにより、移載対象箇所と本体載置部との間で物品の移載を行うものであり、例えば、複数の物品移載箇所の間で物品を搬送する物品搬送車に装備される。
そして、移載対象箇所と本体載置部との間で移載する物品は、一対の挟持体の接近離間方向における幅が大きいものや小さいものがあり、一対の挟持体の接近離間方向における幅が一定ではないことがある。
そこで、従来の物品移載装置では、制御手段が、移載対象箇所から本体載置部に物品を移載するときには、物品の一対の挟持体の接近離間方向における幅情報に基づいて、一対の挟持体を物品よりも外側に離間させる形態で解除状態に維持して一対の挟持体を引退位置から突出位置に突出作動させるべく、挟持状態切換手段の作動及び出退駆動手段の作動を制御している(例えば、特許文献1参照。)。
また、従来の物品移載装置では、本体載置部から移載対象箇所に物品を移載するときには、一対の挟持体を物品よりも外側に離間させる一定の位置を設定位置と設定して、制御手段が、一対の挟持体をその設定位置に位置させる形態で挟持状態から解除状態に切り換えるべく、挟持状態切換手段の作動を制御している。
そして、移載対象箇所と本体載置部との間で移載する物品は、一対の挟持体の接近離間方向における幅が大きいものや小さいものがあり、一対の挟持体の接近離間方向における幅が一定ではないことがある。
そこで、従来の物品移載装置では、制御手段が、移載対象箇所から本体載置部に物品を移載するときには、物品の一対の挟持体の接近離間方向における幅情報に基づいて、一対の挟持体を物品よりも外側に離間させる形態で解除状態に維持して一対の挟持体を引退位置から突出位置に突出作動させるべく、挟持状態切換手段の作動及び出退駆動手段の作動を制御している(例えば、特許文献1参照。)。
また、従来の物品移載装置では、本体載置部から移載対象箇所に物品を移載するときには、一対の挟持体を物品よりも外側に離間させる一定の位置を設定位置と設定して、制御手段が、一対の挟持体をその設定位置に位置させる形態で挟持状態から解除状態に切り換えるべく、挟持状態切換手段の作動を制御している。
上記従来の物品移載装置では、本体載置部から移載対象箇所に物品を移載するときに、一対の挟持体を一定の位置である設定位置に位置させる形態で挟持状態から解除状態に切り換えるため、物品の一対の挟持体の接近離間方向における幅によっては、一対の挟持体を移動させる距離が長くなり、物品移載にかかる時間が長くなる虞がある。
説明すると、一対の挟持体を設定位置まで離間する側に移動させることにより、挟持状態から解除状態に切り換えるわけであるが、挟持状態から解除状態に切り換わるときの一対の挟持体の位置は、一定の位置ではなく、一対の挟持体の接近離間方向における幅が大きい物品のときの方が一対の挟持体の接近離間方向における幅が小さい物品のときよりも一対の挟持体を離間させる側に位置する。
そして、設定位置は、一対の挟持体の接近離間方向における幅が小さい物品でも大きい物品でも、設定位置まで一対の挟持体を移動させることによって、挟持状態から解除状態に切り換わるように設定することが必要である。
したがって、挟持状態から解除状態に切り換わるときの一対の挟持体の位置が、一対の挟持体の接近離間方向における幅が小さい物品よりも一対の挟持体を離間させる側に位置する一対の挟持体の接近離間方向における幅が大きい物品に対応させて、例えば、その物品から設定距離離れた位置を設定位置として設定することになる。
しかしながら、このように設定位置を設定すると、一対の挟持体の接近離間方向における幅が小さい物品であるときには、解除状態に切り換えたあとも、さらに一対の挟持体の移動を継続することになり、一対の挟持体を移動させる距離が長くなる。
そして、設定位置は、一対の挟持体の接近離間方向における幅が小さい物品でも大きい物品でも、設定位置まで一対の挟持体を移動させることによって、挟持状態から解除状態に切り換わるように設定することが必要である。
したがって、挟持状態から解除状態に切り換わるときの一対の挟持体の位置が、一対の挟持体の接近離間方向における幅が小さい物品よりも一対の挟持体を離間させる側に位置する一対の挟持体の接近離間方向における幅が大きい物品に対応させて、例えば、その物品から設定距離離れた位置を設定位置として設定することになる。
しかしながら、このように設定位置を設定すると、一対の挟持体の接近離間方向における幅が小さい物品であるときには、解除状態に切り換えたあとも、さらに一対の挟持体の移動を継続することになり、一対の挟持体を移動させる距離が長くなる。
本発明は、かかる点に着目してなされたものであり、その目的は、物品移載にかかる時間の短縮化を図ることができる物品移載装置及び物品収納設備を提供する点にある。
この目的を達成するために、本発明にかかる物品移載装置の第1特徴構成は、水平方向に接近離間自在で且つ物品を載置支持する本体載置部側に引退させた引退位置と外部の移載対象箇所側に突出させた突出位置とに出退自在な一対の挟持体と、前記一対の挟持体を接近作動させて物品を両横から挟持する挟持状態と前記一対の挟持体を離間作動させて物品に対する挟持を解除する解除状態とに切換自在な挟持状態切換手段と、前記一対の挟持体を引退位置と突出位置とに出退駆動させる出退駆動手段と、前記挟持状態切換手段の作動及び前記出退駆動手段の作動を制御する制御手段とが設けられ、前記制御手段が、移載対象箇所から前記本体載置部に物品を移載するときには、前記解除状態に維持して前記一対の挟持体を引退位置から突出位置に突出作動させたのち、前記解除状態から前記挟持状態に切り換え、その後前記挟持状態に維持して前記一対の挟持体を突出位置から引退位置に引退作動させるべく、前記挟持状態切換手段の作動及び前記出退駆動手段の作動を制御するように構成され、且つ、前記本体載置部から移載対象箇所に物品を移載するときには、前記挟持状態に維持して前記一対の挟持体を引退位置から突出位置に突出作動させたのち、前記挟持状態から前記解除状態に切り換え、その後前記解除状態に維持して前記一対の挟持体を突出位置から引退位置に引退作動させるべく、前記挟持状態切換手段の作動及び前記出退駆動手段の作動を制御するように構成されている物品移載装置において、
前記制御手段が、前記本体載置部から移載対象箇所に物品を移載するときには、前記一対の挟持体の接近離間方向での位置を検出する位置検出手段の位置情報、及び、前記本体載置部から移載対象箇所に移載する物品の前記一対の挟持体の接近離間方向における幅情報に基づいて、前記一対の挟持体をその物品から設定距離離れた位置に離間させる形態で前記挟持状態から前記解除状態に切り換えるべく、前記挟持状態切換手段の作動を制御するように構成されている。
前記制御手段が、前記本体載置部から移載対象箇所に物品を移載するときには、前記一対の挟持体の接近離間方向での位置を検出する位置検出手段の位置情報、及び、前記本体載置部から移載対象箇所に移載する物品の前記一対の挟持体の接近離間方向における幅情報に基づいて、前記一対の挟持体をその物品から設定距離離れた位置に離間させる形態で前記挟持状態から前記解除状態に切り換えるべく、前記挟持状態切換手段の作動を制御するように構成されている。
すなわち、制御手段が、本体載置部から移載対象箇所に物品を移載するときには、位置検出手段の位置情報、及び、物品の一対の挟持体の接近離間方向における幅情報に基づいて、一対の挟持体をその物品から設定距離離れた位置まで離間する側に移動させて、挟持状態から解除状態に切り換えるべく、挟持状態切換手段の作動を制御することになる。
このように一対の挟持体を物品から設定距離離れた位置まで移動させると、一対の挟持体の接近離間方向における幅が小さい物品でも大きい物品でも、挟持状態から解除状態に切り換えることができることになる。このとき、一対の挟持体の移動は、一対の挟持体の接近離間方向における幅が小さい物品でも大きい物品でも、挟持状態から解除状態に切り換える物品から設定距離離れた位置までとなる。
したがって、挟持状態から解除状態に切り換えるときに一対の挟持体を移動させる距離を短くできることとなって、物品移載にかかる時間の短縮化を図ることができる物品移載装置を提供できるに至った。
このように一対の挟持体を物品から設定距離離れた位置まで移動させると、一対の挟持体の接近離間方向における幅が小さい物品でも大きい物品でも、挟持状態から解除状態に切り換えることができることになる。このとき、一対の挟持体の移動は、一対の挟持体の接近離間方向における幅が小さい物品でも大きい物品でも、挟持状態から解除状態に切り換える物品から設定距離離れた位置までとなる。
したがって、挟持状態から解除状態に切り換えるときに一対の挟持体を移動させる距離を短くできることとなって、物品移載にかかる時間の短縮化を図ることができる物品移載装置を提供できるに至った。
本発明にかかる物品移載装置の第2特徴構成は、前記制御手段が、前記本体載置部から移載対象箇所に移載する物品の前記一対の挟持体の接近離間方向における幅情報として、前記本体載置部から移載対象箇所に移載する物品に対して前記一対の挟持体を接近作動させて前記挟持状態に切り換えたときの前記一対の挟持体の位置情報を用いるように構成されている点にある。
すなわち、本体載置部から移載対象箇所に移載する物品に対して一対の挟持体を接近作動させて挟持状態に切り換えたときには、一対の挟持体がその物品の一対の挟持体の接近離間方向における幅に対応して間隔を隔てて位置することになるので、物品に対して一対の挟持体を接近作動させて挟持状態に切り換えたときの一対の挟持体の位置情報を、その物品の一対の挟持体の接近離間方向における幅情報として用いることができる。したがって、物品の一対の挟持体の接近離間方向における幅情報を計測する特別な装置を設けることもなく、本体載置部から移載対象箇所に移載する物品に対して一対の挟持体を接近作動させて挟持状態に切り換えるという動作を行うだけで、本体載置部から移載対象箇所に移載する物品の一対の挟持体の接近離間方向における幅情報を取得することができることとなって、構成の簡素化を図ることができることになる。
また、制御手段は、移載対象箇所から本体載置部に物品を移載するときに、その物品に対して一対の挟持体を接近作動させて挟持状態に切り換えるので、このときに、その物品の一対の挟持体の接近離間方向における幅情報を取得できることになる。そして、本体載置部から移載対象箇所に移載する物品が、その前に、移載対象箇所から本体載置部に移載した物品であると、移載対象箇所から本体載置部に物品を移載するときに、挟持状態に切り換えたときの一対の挟持体の位置情報を取得できることになる。したがって、本体載置部から移載対象箇所に移載する物品の一対の挟持体の接近離間方向における幅情報を取得するためだけに、その物品に対して一対の挟持体を接近作動させて挟持状態に切り換えるという動作も不要となり、より一層の構成の簡素化を図ることができることになる。
また、制御手段は、移載対象箇所から本体載置部に物品を移載するときに、その物品に対して一対の挟持体を接近作動させて挟持状態に切り換えるので、このときに、その物品の一対の挟持体の接近離間方向における幅情報を取得できることになる。そして、本体載置部から移載対象箇所に移載する物品が、その前に、移載対象箇所から本体載置部に移載した物品であると、移載対象箇所から本体載置部に物品を移載するときに、挟持状態に切り換えたときの一対の挟持体の位置情報を取得できることになる。したがって、本体載置部から移載対象箇所に移載する物品の一対の挟持体の接近離間方向における幅情報を取得するためだけに、その物品に対して一対の挟持体を接近作動させて挟持状態に切り換えるという動作も不要となり、より一層の構成の簡素化を図ることができることになる。
本発明にかかる物品移載装置の第3特徴構成は、前記挟持状態切換手段が、前記一対の挟持体を接近作動及び離間作動させる電動モータを備えて構成され、前記制御手段は、前記電動モータの作動を制御することにより、前記挟持状態切換手段の作動を制御するように構成され、且つ、前記一対の挟持体を接近作動させたときに前記電動モータのトルク値が設定トルク値以上となると、前記挟持状態に切り換えたと判別するように構成されている。
すなわち、解除状態から挟持状態に切り換えるために一対の挟持体を接近作動させるときには、制御手段が、電動モータのトルク値に基づいて、電動モータの作動を制御し、そのトルク値が設定トルク値以上となることにより、挟持状態に切り換えたと判別して、電動モータの作動を停止させることになる。
そして、一対の挟持体にて物品を両横から挟持すると、一対の挟持体の接近作動が物品にて規制されて電動モータのトルクが上昇して、そのトルク値が設定トルク値以上となるので、挟持状態であることを検出する特別なセンサを設けなくても、制御手段が電動モータのトルクを検出するだけで、挟持状態に切り換えたことを判別できることとなって、構成の簡素化を図ることができることになる。
そして、一対の挟持体にて物品を両横から挟持すると、一対の挟持体の接近作動が物品にて規制されて電動モータのトルクが上昇して、そのトルク値が設定トルク値以上となるので、挟持状態であることを検出する特別なセンサを設けなくても、制御手段が電動モータのトルクを検出するだけで、挟持状態に切り換えたことを判別できることとなって、構成の簡素化を図ることができることになる。
本発明にかかる物品収納設備の特徴構成は、走行台車とその走行台車から立設された昇降マストに沿って昇降駆動される昇降台を備えた物品搬送車における前記昇降台に、上記本発明にかかる物品移載装置の第1〜第3特徴構成のいずれか一つに記載の物品移載装置が装備され、物品収納棚の棚横幅方向並びに上下幅方向に並ぶ収納部、入庫用荷受部、及び、出庫用荷受部の夫々を移載対象箇所として前記物品搬送車を運転する運転制御手段が設けられている点にある。
すなわち、運転制御手段が、収納部と物品移載装置の本体載置部との間で物品を移載するときには、収納部を移載対象として、物品搬送車を運転し、且つ、入庫用荷受部から物品移載装置の本体載置部に物品を移載するときには、入庫用荷受部を移載対象箇所として、物品搬送車を運転し、且つ、物品移載装置の本体載置部から出庫用荷受部に物品を移載するときには、出庫用荷受部を移載対象箇所として、物品搬送車を運転することになる。
そして、運転制御手段は、走行台車を走行させ及び昇降台を昇降駆動させて、移載対象箇所に対応する位置に昇降台を位置させた状態において、移載対象箇所と物品移載装置の本体載置部との間で物品を移載すべく、物品移載装置の作動を制御することになる。
そして、運転制御手段は、走行台車を走行させ及び昇降台を昇降駆動させて、移載対象箇所に対応する位置に昇降台を位置させた状態において、移載対象箇所と物品移載装置の本体載置部との間で物品を移載すべく、物品移載装置の作動を制御することになる。
そして、入庫用荷受部から物品移載装置の本体載置部に物品を移載したのち、その物品を本体載置部から収納部に移載することにより、物品収納棚の収納部に物品を入庫する入庫作業を行えることになる。また、収納部から物品移載装置の本体載置部に物品を移載したのち、その物品を本体載置部から出庫用荷受部に移載することにより、物品収納棚の収納部から物品を出庫する出庫作業を行えることになる。
入庫作業において本体載置部から収納部に物品を移載するとき、及び、出庫作業において本体載置部から出庫用荷受部に物品を移載するときには、運転制御手段が、一対の挟持体の接近離間方向での位置を検出する位置検出手段の位置情報、及び、本体載置部から収納部に移載する物品及び本体載置部から出庫用荷受部に移載する物品の一対の挟持体の接近離間方向における幅情報に基づいて、一対の挟持体をその物品から設定距離離れた位置に離間させる形態で挟持状態から解除状態に切り換えるべく、挟持状態切換手段の作動を制御することになる。
したがって、入庫作業における本体載置部から収納部への物品の移載、及び、出庫作業における本体載置部から出庫用荷受部への物品の移載を迅速に行うことができることとなって、入庫作業及び出庫作業を迅速に行うことができる物品収納設備を提供できることになる。
本発明にかかる物品移載装置を装備した物品収納設備の実施形態について図面に基づいて説明する。
この物品収納設備は、図1に示すように、物品を出し入れする前面が互いに対向するように間隔を隔てて設置した二つの物品収納棚1と、それらの物品収納棚1どうしの間に形成した走行通路2を自動走行する物品搬送車としてのスタッカークレーン3とを設けて構成されている。
この物品収納設備は、図1に示すように、物品を出し入れする前面が互いに対向するように間隔を隔てて設置した二つの物品収納棚1と、それらの物品収納棚1どうしの間に形成した走行通路2を自動走行する物品搬送車としてのスタッカークレーン3とを設けて構成されている。
各物品収納棚1は、棚横幅方向(水平方向)に間隔を隔てて立設した複数の支柱1aと、棚横幅方向に並ぶ複数の支柱1aにわたって設けられた物品載置板1bとを備えて構成されている。そして、物品収納棚1は、物品載置板1bにて物品Bを載置支持する形態で物品Bを収納するように構成され、各物品Bを収納する収納部4が棚横幅方向並びに棚上下方向に複数並ぶように設けられている。
前記物品収納棚1に対する物品Bの収納については、図2に示すように、棚横幅方向に隣接する支柱1a間の物品載置板1b上に複数の物品Bを並べる形態で物品Bを収納するように構成されている。そして、棚横幅方向における幅が同じ又はほぼ同じ物品Bを同一の物品載置板1bには載置支持させる形態で、棚横幅方向における幅が異なる複数の物品Bを収納するように構成されている。
前記物品収納棚1に対する物品Bの収納については、図2に示すように、棚横幅方向に隣接する支柱1a間の物品載置板1b上に複数の物品Bを並べる形態で物品Bを収納するように構成されている。そして、棚横幅方向における幅が同じ又はほぼ同じ物品Bを同一の物品載置板1bには載置支持させる形態で、棚横幅方向における幅が異なる複数の物品Bを収納するように構成されている。
前記走行通路2には、その床側にレールとしての走行レール5が走行通路2の長手方向に沿って設置され、その天井側にガイドレール6が走行通路2の長手方向に沿って設置されている。
そして、走行レール5の一端側には、スタッカークレーン3の運転を管理する地上側コントローラ7と、走行レール5を挟んで一対の荷載置台8とが設けられている。この荷載置台8は、物品収納棚1に入庫する物品B及び物品収納棚1から出庫する物品Bを載置支持するものであり、入庫用荷受部及び出庫用荷受部として構成されている。
そして、走行レール5の一端側には、スタッカークレーン3の運転を管理する地上側コントローラ7と、走行レール5を挟んで一対の荷載置台8とが設けられている。この荷載置台8は、物品収納棚1に入庫する物品B及び物品収納棚1から出庫する物品Bを載置支持するものであり、入庫用荷受部及び出庫用荷受部として構成されている。
前記スタッカークレーン3は、図3に示すように、走行レール5に沿って走行自在な走行台車9と、その走行台車9に立設された昇降マスト10に沿って昇降自在な昇降台11と、その昇降台11に装備された物品移載装置12とを備えて構成されている。
前記昇降マスト10は、走行台車9の前端部と後端部の夫々に一つずつ前後一対設けられている。そして、昇降マスト10の上端部には、前後一対の昇降マスト10の上端部どうしを連結し且つガイドレール6に案内される上部フレーム13が設けられている。
前記昇降台12は、走行台車10に立設した前後一対の昇降マスト11にて昇降自在に案内支持されており、その左右両側に連結した昇降用ワイヤ14にて吊下げ支持されている。
前記昇降用ワイヤ14は、上部フレーム13に設けた案内プーリ15と一方の昇降マスト10に設けた案内プーリ16とに巻き掛けられて、走行台車10の一端に装備した巻き取りドラム17に連結されている。
そして、巻き取りドラム17をインバータ式モータである昇降用電動モータ18にて正逆に駆動回転させて、昇降用ワイヤ14の繰り出し操作や巻き取り操作により昇降台11を昇降させるように構成されている。
前記昇降用ワイヤ14は、上部フレーム13に設けた案内プーリ15と一方の昇降マスト10に設けた案内プーリ16とに巻き掛けられて、走行台車10の一端に装備した巻き取りドラム17に連結されている。
そして、巻き取りドラム17をインバータ式モータである昇降用電動モータ18にて正逆に駆動回転させて、昇降用ワイヤ14の繰り出し操作や巻き取り操作により昇降台11を昇降させるように構成されている。
前記昇降台11には、上下方向での昇降台11の昇降位置を検出する昇降用ロータリエンコーダ19が設けられている。図示は省略するが、昇降用ロータリエンコーダ19の回転軸には、昇降マスト10の長手方向に沿って設けられたチェーンに歯合するスプロケットが設けられている。そして、昇降用ロータリエンコーダ19は、昇降台11の昇降距離から上下方向での昇降台11の昇降位置を検出する。
また、走行台車9には、走行レール5上を走行自在な前後二つの車輪20が設けられ、二つの車輪20のうちの車体前後方向の一端側の車輪が、インバータ式モータである走行用電動モータ21にて駆動される推進用の駆動輪20aとして構成され、車体前後方向の他端側の車輪が、遊転自在な従動輪20bとして構成されている。
そして、走行台車9は、走行用電動モータ21の作動により駆動輪20aを回転駆動させて走行レール5に沿って走行するように構成されている。
そして、走行台車9は、走行用電動モータ21の作動により駆動輪20aを回転駆動させて走行レール5に沿って走行するように構成されている。
前記走行台車9には、水平方向での走行台車9の走行位置を検出する走行用ロータリエンコーダ22が設けられている。図示は省略するが、走行用ロータリエンコーダ22の回転軸には、走行レール5の長手方向に沿って設けられたチェーンに歯合するスプロケットが設けられている。そして、走行用ロータリエンコーダ22は、走行台車9の走行距離から水平方向での走行台車9の走行位置を検出する。
図4〜図6に基づいて、物品移載装置12の構成について説明する。図4は、物品移載装置12の平面図を示しており、図5は、走行台車9の走行方向に対して直交する移載方向視での物品移載装置12の側面図を示しており、図6は、移載方向に直交する方向視での物品移載装置12の側面図を示している。
前記物品移載装置12は、物品Bを載置支持した状態で移載方向に搬送する本体載置部としてのコンベヤ23と、移載方向と直交する方向に接近離間自在で且つコンベヤ23側に引退させた引退位置と外部の移載対象箇所側に突出させた突出位置とに出退自在な一対の挟持体24と、一対の挟持体24を接近作動させて物品Bを両横から挟持する挟持状態と一対の挟持体24を離間作動させて物品Bに対する挟持を解除する解除状態とに切換自在な挟持状態切換手段25と、一対の挟持体24を引退位置と突出位置とに出退駆動させる出退駆動手段26とを備えて構成されている。
そして、この物品移載装置12は、一対の挟持体24にて物品Bを両横から挟持して出退することにより、コンベヤ23と移載対象箇所との間で物品Bを移載するサイドクランプ式にて構成されている。
前記物品移載装置12は、物品Bを載置支持した状態で移載方向に搬送する本体載置部としてのコンベヤ23と、移載方向と直交する方向に接近離間自在で且つコンベヤ23側に引退させた引退位置と外部の移載対象箇所側に突出させた突出位置とに出退自在な一対の挟持体24と、一対の挟持体24を接近作動させて物品Bを両横から挟持する挟持状態と一対の挟持体24を離間作動させて物品Bに対する挟持を解除する解除状態とに切換自在な挟持状態切換手段25と、一対の挟持体24を引退位置と突出位置とに出退駆動させる出退駆動手段26とを備えて構成されている。
そして、この物品移載装置12は、一対の挟持体24にて物品Bを両横から挟持して出退することにより、コンベヤ23と移載対象箇所との間で物品Bを移載するサイドクランプ式にて構成されている。
前記コンベヤ23は、移載方向に対して左右両側に振り分けて配設した一対のフレーム27に回転自在に支持された複数のローラ28を備えたローラコンベヤにて構成されている。図6に示すように、各ローラ28の一端部には受動歯輪29が一体的に設けられ、コンベヤ用電動モータ30の出力軸には駆動歯輪31が設けられている。そして、駆動歯輪31、各受動歯輪29、及び、案内歯輪32にわたって伝動チェーン33が掛けられている。
前記コンベヤ用電動モータ30を回転駆動させると、伝動チェーン33が回転駆動されて複数のローラ28を回転駆動させ、物品Bを移載方向に搬送するように構成されている。そして、コンベヤ用電動モータ30を正逆に回転駆動させることによって、物品Bを移載方向に往復搬送可能に構成されている。
前記コンベヤ用電動モータ30を回転駆動させると、伝動チェーン33が回転駆動されて複数のローラ28を回転駆動させ、物品Bを移載方向に搬送するように構成されている。そして、コンベヤ用電動モータ30を正逆に回転駆動させることによって、物品Bを移載方向に往復搬送可能に構成されている。
前記一対の挟持体24は、互いに対向する内面にて物品Bの横側面を挟持する板状に形成されており、移載方向に対して左右両側に振り分けて配設された一対の可動体34に支持されている。そして、可動体34は、図6に示すように、挟持体24の被ガイド部を案内支持するガイド部34aを備えて、挟持体24を移載方向に出退自在に支持している。
また、可動体34を支持する一対の支持台35が左右両側に振り分けられており、この一対の支持台35が、接近離間自在に設けられている。
また、可動体34を支持する一対の支持台35が左右両側に振り分けられており、この一対の支持台35が、接近離間自在に設けられている。
前記挟持状態切換手段25は、一対の挟持体24を接近作動及び離間作動させるべく、一対の支持台35を接近移動及び離間移動させる電動モータとしての接近離間用電動モータ36を備え、一対の支持台35を接近移動させることにより可動体34と一体的に一対の挟持体24を接近作動させて物品Bを両横から挟持する挟持状態と、一対の支持台35を離間移動させることにより可動体34と一体的に一対の挟持体24を離間作動させて物品Bに対する挟持を解除する解除状態とに切り換えるように構成されている。
前記支持台35は、移載方向の中央部分において移載方向と直交する方向に沿って配設されたガイドレール37にスライド移動自在に設けられている。図4に示すように、一対の支持台35の一方側には、接近離間用電動モータ36の出力軸に設けられた駆動輪体38が配設され、一対の支持台35の他方側には、受動輪体39が遊転自在に配設されている。そして、駆動輪体38と受動輪体39とにわたって無端伝導体40が掛けられており、この無端伝導体40の途中経路部分が、一対の支持台35の夫々に振り分けて連結されている。
前記接近離間用電動モータ36を回転駆動させることによって、無端伝動体40を回転駆動させ、ガイドレール37にて支持案内して一対の支持台35を接近移動させる。このように一対の支持台35を接近移動させることによって、一対の挟持体24と一対の可動体34とを一体的に接近作動させて挟持状態に切り換える。
また、接近離間用電動モータ36を逆方向に回転駆動させることによって、無端伝動体40を逆方向に回転駆動させ、ガイドレール37にて支持案内して一対の支持台35を離間移動させる。このように支持台35を離間移動させることによって、一対の挟持体24と一対の可動体34とを一体的に離間作動させて解除状態に切り換える。
前記接近離間用電動モータ36を回転駆動させることによって、無端伝動体40を回転駆動させ、ガイドレール37にて支持案内して一対の支持台35を接近移動させる。このように一対の支持台35を接近移動させることによって、一対の挟持体24と一対の可動体34とを一体的に接近作動させて挟持状態に切り換える。
また、接近離間用電動モータ36を逆方向に回転駆動させることによって、無端伝動体40を逆方向に回転駆動させ、ガイドレール37にて支持案内して一対の支持台35を離間移動させる。このように支持台35を離間移動させることによって、一対の挟持体24と一対の可動体34とを一体的に離間作動させて解除状態に切り換える。
前記出退駆動手段26は、挟持体24を可動体34に対して突出移動及び引退移動させる出退用電動モータ41を備えて構成されている。
前記出退用電動モータ41の出力軸には、図4及び図6に示すように、巻き掛け連動装置42を介して出退駆動軸43が連動連結されており、出退駆動軸43は、移載方向の中央部分において、移載方向と直交する方向に沿って一対の支持台35を貫通する状態で配設されている。
前記出退駆動軸43は、支持台35の接近離間移動範囲に相当する部分がスプライン軸部にて構成され、一対の支持台35の夫々には、出退駆動軸43におけるスプライン軸部にスプライン嵌合された駆動歯輪44が回転自在に設けられている。一対の可動体34の夫々には、図6に示すように、その長手方向の両端部に受動歯輪45が遊転自在に設けられている。そして、駆動歯輪44、受動歯輪45、及び、案内歯輪46にわたって無端チェーン47が掛けられており、この無端チェーン47の途中経路部分が、挟持体24に連結されている。
前記出退用電動モータ41を回転駆動させることによって、巻き掛け連動装置42及び出退駆動軸43を介して無端チェーン47を回転駆動させ、可動体34のガイド部34aにて案内支持して挟持体24を引退位置から突出位置に突出作動させる。
また、出退用電動モータ41を逆方向に回転駆動させることによって、巻き掛け連動装置42及び出退駆動軸43を介して無端チェーン47を逆方向に回転駆動させ、可動体34のガイド部34aにて案内支持して挟持体24を突出位置から引退位置に引退作動させる。
前記出退用電動モータ41の出力軸には、図4及び図6に示すように、巻き掛け連動装置42を介して出退駆動軸43が連動連結されており、出退駆動軸43は、移載方向の中央部分において、移載方向と直交する方向に沿って一対の支持台35を貫通する状態で配設されている。
前記出退駆動軸43は、支持台35の接近離間移動範囲に相当する部分がスプライン軸部にて構成され、一対の支持台35の夫々には、出退駆動軸43におけるスプライン軸部にスプライン嵌合された駆動歯輪44が回転自在に設けられている。一対の可動体34の夫々には、図6に示すように、その長手方向の両端部に受動歯輪45が遊転自在に設けられている。そして、駆動歯輪44、受動歯輪45、及び、案内歯輪46にわたって無端チェーン47が掛けられており、この無端チェーン47の途中経路部分が、挟持体24に連結されている。
前記出退用電動モータ41を回転駆動させることによって、巻き掛け連動装置42及び出退駆動軸43を介して無端チェーン47を回転駆動させ、可動体34のガイド部34aにて案内支持して挟持体24を引退位置から突出位置に突出作動させる。
また、出退用電動モータ41を逆方向に回転駆動させることによって、巻き掛け連動装置42及び出退駆動軸43を介して無端チェーン47を逆方向に回転駆動させ、可動体34のガイド部34aにて案内支持して挟持体24を突出位置から引退位置に引退作動させる。
前記物品移載装置12には、移載方向において、その中央部に物品Bが存在するか否かを検出する光電式の第1在荷センサ48a,48bが移載方向に間隔を隔てて一対設けられ、その第1在荷センサ48a,48bよりも外側の設定位置に物品Bが存在するか否かを検出する光電式の第2在荷センサ49a,49bが移載方向に間隔を隔てて一対設けられている。
また、コンベヤ23に載置支持される物品Bがコンベヤ23からはみ出しているか否かを検出する光電式のはみ出しセンサ50a,50bが移載方向の両端部に設けられている。
また、コンベヤ23に載置支持される物品Bがコンベヤ23からはみ出しているか否かを検出する光電式のはみ出しセンサ50a,50bが移載方向の両端部に設けられている。
このスタッカークレーン3には、図7に示すように、地上側コントローラ7からの指令に基づいて、スタッカークレーン3の運転を制御する運転制御手段としてのクレーン制御装置51が設けられている。
そして、このクレーン制御装置51に対して、昇降用ロータリエンコーダ19の検出情報、走行用ロータリエンコーダ22の検出情報、第1在荷センサ48a,48bの検出情報、第2在荷センサ49a,49bの検出情報、及び、はみ出しセンサ50a,50bの検出情報が入力されるように構成されている。
また、接近離間用電動モータ36のトルクを検出するトルク検出センサ52の検出情報、及び、接近離間用電動モータ36の回転数に基づいて一対の挟持体24の接近離間方向での位置を検出する位置検出手段としての位置検出センサ53の検出情報も、クレーン制御装置51に入力されるように構成されている。
そして、このクレーン制御装置51に対して、昇降用ロータリエンコーダ19の検出情報、走行用ロータリエンコーダ22の検出情報、第1在荷センサ48a,48bの検出情報、第2在荷センサ49a,49bの検出情報、及び、はみ出しセンサ50a,50bの検出情報が入力されるように構成されている。
また、接近離間用電動モータ36のトルクを検出するトルク検出センサ52の検出情報、及び、接近離間用電動モータ36の回転数に基づいて一対の挟持体24の接近離間方向での位置を検出する位置検出手段としての位置検出センサ53の検出情報も、クレーン制御装置51に入力されるように構成されている。
前記クレーン制御装置51は、荷載置台8に載置支持された物品Bを物品収納棚1に入庫する、及び、物品収納棚1に収納されている物品Bを荷載置台8に出庫するように、物品収納棚1の収納部4、及び、荷載置台8の夫々を移載対象箇所としてスタッカークレーン3を運転するように構成されている。
そして、クレーン制御装置51は、走行用ロータリエンコーダ22の検出情報に基づいて、指令された位置に昇降台11を位置させるように走行台車9を走行させるべく、走行用電動モータ21の作動を制御する走行制御部51a、昇降用ロータリエンコーダ19の検出情報に基づいて、指令された位置に昇降台11を位置させるように昇降台11を昇降させるべく、昇降用電動モータ18の作動を制御する昇降制御部51b、第1在荷センサ48a,48bの検出情報、第2在荷センサ49a,49bの検出情報、トルク検出センサ52の検出情報、及び、位置検出センサ53の位置情報に基づいて、移載対象箇所とコンベヤ23との間で物品Bを移載すべく、コンベヤ用電動モータ30、接近離間用電動モータ36の作動、及び、出退用電動モータ41の作動を制御する制御手段としての移載制御部51cを備えて構成されている。
そして、クレーン制御装置51は、走行用ロータリエンコーダ22の検出情報に基づいて、指令された位置に昇降台11を位置させるように走行台車9を走行させるべく、走行用電動モータ21の作動を制御する走行制御部51a、昇降用ロータリエンコーダ19の検出情報に基づいて、指令された位置に昇降台11を位置させるように昇降台11を昇降させるべく、昇降用電動モータ18の作動を制御する昇降制御部51b、第1在荷センサ48a,48bの検出情報、第2在荷センサ49a,49bの検出情報、トルク検出センサ52の検出情報、及び、位置検出センサ53の位置情報に基づいて、移載対象箇所とコンベヤ23との間で物品Bを移載すべく、コンベヤ用電動モータ30、接近離間用電動モータ36の作動、及び、出退用電動モータ41の作動を制御する制御手段としての移載制御部51cを備えて構成されている。
荷載置台8に載置支持された物品Bを物品収納棚1に入庫するときには、地上側コントローラ7が、入庫する物品Bが載置支持された荷載置台8を掬い用の移載対象箇所としてその荷載置台8に対応する物品移載用の目標位置と、複数の収納部4のいずれか一つを卸し用の移載対象箇所としてその収納部4に対応する物品移載用の目標位置とを指令する形態で、入庫指令をクレーン制御装置51に与えるように構成されている。
また、物品収納棚1に収納されている物品Bを荷載置台8に出庫するときには、地上側コントローラ7が、出庫する物品Bが収納された収納部4を掬い用の移載対象箇所としてその収納部4に対応する物品移載用の目標位置と、出庫する物品Bを載置支持するに荷載置台8を卸し用の移載対象箇所としてその荷載置台8に対応する物品移載用の目標位置とを指令する形態で、出庫指令をクレーン制御装置51に与えるように構成されている。
また、物品収納棚1に収納されている物品Bを荷載置台8に出庫するときには、地上側コントローラ7が、出庫する物品Bが収納された収納部4を掬い用の移載対象箇所としてその収納部4に対応する物品移載用の目標位置と、出庫する物品Bを載置支持するに荷載置台8を卸し用の移載対象箇所としてその荷載置台8に対応する物品移載用の目標位置とを指令する形態で、出庫指令をクレーン制御装置51に与えるように構成されている。
前記物品移載用の目標位置は、物品移載装置12がコンベヤ23と移載対象箇所との間で物品Bを移載するときに昇降台11を位置させるための位置である。前記地上側コントローラ7は、物品収納棚1の複数の収納部4の全てに対応する物品移載用の目標位置及び荷載置台8に対応する物品移載用の目標位置を記憶しており、物品収納棚1の複数の収納部4にどの物品Bが収納されているかなどの収納状況についても記憶している。そして、地上側コントローラ7は、複数の収納部4から移載対象箇所とする収納部4を選択して、その収納部4に対応する物品移載用の目標位置を指令する、又は、一対の荷載置台8から移載対象箇所とする荷載置台8を選択して、その荷載置台8に対応する物品移載用の目標位置を指令する。
前記クレーン制御装置51は、地上側コントローラ7から入庫指令が指令されると、まず、掬い用の移載対象箇所である荷載置台8から物品Bを掬い取る掬い処理を行い、次に、卸し用の移載対象箇所である収納部4に物品Bを卸す卸し処理を行うように構成されている。
また、クレーン制御装置51は、地上側コントローラ7から出庫指令が指令されると、まず、掬い用の移載対象箇所である収納部4から物品Bを掬い取る掬い処理を行い、次に、卸し用の移載対象箇所である荷載置台8に物品Bを卸す卸し処理を行うように構成されている。
また、クレーン制御装置51は、地上側コントローラ7から出庫指令が指令されると、まず、掬い用の移載対象箇所である収納部4から物品Bを掬い取る掬い処理を行い、次に、卸し用の移載対象箇所である荷載置台8に物品Bを卸す卸し処理を行うように構成されている。
前記掬い処理について説明する。
前記走行制御部51aが、走行用ロータリエンコーダ22の検出情報に基づいて、掬い用の物品移載箇所である荷載置台8又は収納部4に対応する物品移載用の目標位置に昇降台11を位置させるべく、走行用電動モータ21の作動を制御する。
前記昇降制御部51bが、昇降用ロータリエンコーダ19の検出情報に基づいて、掬い用の物品移載箇所である荷載置台8又は収納部4に対応する物品移載用の目標位置に昇降台11を位置させるべく、昇降用電動モータ18の作動を制御する。
そして、昇降台11を目標位置に位置させた状態において、移載制御部51cが、一対の挟持体24を離間作動させて物品Bに対する挟持を解除する解除状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させたのち、解除状態から一対の挟持体24を接近作動させて物品Bを両横から挟持する挟持状態に切り換え、その後挟持状態に維持して一対の挟持体24を突出位置から引退位置に引退作動させるべく、接近離間用電動モータ36の作動、及び、出退用電動モータ41の作動を制御し、且つ、挟持状態に維持して一対の挟持体24を突出位置から引退位置に引退作動させるときに、コンベヤ23を搬送作動させるべく、コンベヤ用電動モータ30の作動を制御する。
前記走行制御部51aが、走行用ロータリエンコーダ22の検出情報に基づいて、掬い用の物品移載箇所である荷載置台8又は収納部4に対応する物品移載用の目標位置に昇降台11を位置させるべく、走行用電動モータ21の作動を制御する。
前記昇降制御部51bが、昇降用ロータリエンコーダ19の検出情報に基づいて、掬い用の物品移載箇所である荷載置台8又は収納部4に対応する物品移載用の目標位置に昇降台11を位置させるべく、昇降用電動モータ18の作動を制御する。
そして、昇降台11を目標位置に位置させた状態において、移載制御部51cが、一対の挟持体24を離間作動させて物品Bに対する挟持を解除する解除状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させたのち、解除状態から一対の挟持体24を接近作動させて物品Bを両横から挟持する挟持状態に切り換え、その後挟持状態に維持して一対の挟持体24を突出位置から引退位置に引退作動させるべく、接近離間用電動モータ36の作動、及び、出退用電動モータ41の作動を制御し、且つ、挟持状態に維持して一対の挟持体24を突出位置から引退位置に引退作動させるときに、コンベヤ23を搬送作動させるべく、コンベヤ用電動モータ30の作動を制御する。
前記卸し処理について説明する。
前記走行制御部51aが、走行用ロータリエンコーダ22の検出情報に基づいて、卸し用の物品移載箇所である荷載置台8又は収納部4に対応する物品移載用の目標位置に昇降台11を位置させるべく、走行用電動モータ21の作動を制御する。
前記昇降制御部51bが、昇降用ロータリエンコーダ19の検出情報に基づいて、卸し用の物品移載箇所である荷載置台8又は収納部4に対応する物品移載用の目標位置に昇降台11を位置させるべく、昇降用電動モータ18の作動を制御する。
そして、昇降台11を目標位置に位置させた状態において、移載制御部51cが、挟持状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させたのち、挟持状態から解除状態に切り換え、その後解除状態に維持して一対の挟持体24を突出位置から引退位置に引退作動させるべく、接近離間用電動モータ36の作動、及び、出退用電動モータ41の作動を制御し、且つ、挟持状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させるときに、コンベヤ23を搬送作動させるべく、コンベヤ用電動モータ30の作動を制御する。
前記走行制御部51aが、走行用ロータリエンコーダ22の検出情報に基づいて、卸し用の物品移載箇所である荷載置台8又は収納部4に対応する物品移載用の目標位置に昇降台11を位置させるべく、走行用電動モータ21の作動を制御する。
前記昇降制御部51bが、昇降用ロータリエンコーダ19の検出情報に基づいて、卸し用の物品移載箇所である荷載置台8又は収納部4に対応する物品移載用の目標位置に昇降台11を位置させるべく、昇降用電動モータ18の作動を制御する。
そして、昇降台11を目標位置に位置させた状態において、移載制御部51cが、挟持状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させたのち、挟持状態から解除状態に切り換え、その後解除状態に維持して一対の挟持体24を突出位置から引退位置に引退作動させるべく、接近離間用電動モータ36の作動、及び、出退用電動モータ41の作動を制御し、且つ、挟持状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させるときに、コンベヤ23を搬送作動させるべく、コンベヤ用電動モータ30の作動を制御する。
図8に基づいて、掬い処理及び卸し処理における移載制御部51cによる動作について説明する。
まず、掬い処理における移載制御部51cによる動作について説明する。
前記移載制御部51cは、図8(イ)に示すように、位置検出センサ53の検出情報に基づいて、一対の挟持体24を物品Bから外側に離間させる設定位置に一対の挟持体24を離間させるべく、接近離間用電動モータ36を作動させて解除状態とする。このとき、移載制御部51cが、物品Bの一対の挟持体24の接近離間方向における幅情報を取得していれば、その物品Bから設定距離離れた位置を設定位置として、その設定位置に一対の挟持体24を離間させるべく、接近離間用電動モータ36を作動させる。
このように解除状態とすると、移載制御部51cは、図8(ロ)に示すように、その解除状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させるべく、出退用電動モータ36を作動させる。
図外の突出位置検出センサにより一対の挟持体24が突出位置に位置したことが検出されると、移載制御部51cは、図8(ハ)に示すように、解除状態から挟持状態に切り換えるべく、接近離間用電動モータ36を作動させる。
そして、移載制御部51cは、トルク検出センサ52にて検出されたトルク値が設定トルク値以上となると、挟持状態に切り換えたと判別して、図8(ニ)に示すように、挟持状態に維持して一対の挟持体24を突出位置から引退位置に引退作動させるべく、出退用電動モータ36を作動させ、且つ、コンベヤ23を搬送作動させるべく、コンベヤ用電動モータ30を作動させる。
その後、移載制御部51cは、物品Bを移載する側に近い方の第1在荷センサ48aにて物品Bの先端を検出してから設定時間経過すると、図8(ホ)に示すように、挟持状態から解除状態に切り換えるべく、接近離間用電動モータ36を作動させる。
また、移載制御部35cは、図8(へ)に示すように、物品Bを移載する側に遠い方の第2在荷センサ49bにて物品Bの先端を検出してから設定時間経過すると、コンベヤ23の搬送作動を停止させるべく、コンベヤ用電動モータ30の作動を停止させる。
まず、掬い処理における移載制御部51cによる動作について説明する。
前記移載制御部51cは、図8(イ)に示すように、位置検出センサ53の検出情報に基づいて、一対の挟持体24を物品Bから外側に離間させる設定位置に一対の挟持体24を離間させるべく、接近離間用電動モータ36を作動させて解除状態とする。このとき、移載制御部51cが、物品Bの一対の挟持体24の接近離間方向における幅情報を取得していれば、その物品Bから設定距離離れた位置を設定位置として、その設定位置に一対の挟持体24を離間させるべく、接近離間用電動モータ36を作動させる。
このように解除状態とすると、移載制御部51cは、図8(ロ)に示すように、その解除状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させるべく、出退用電動モータ36を作動させる。
図外の突出位置検出センサにより一対の挟持体24が突出位置に位置したことが検出されると、移載制御部51cは、図8(ハ)に示すように、解除状態から挟持状態に切り換えるべく、接近離間用電動モータ36を作動させる。
そして、移載制御部51cは、トルク検出センサ52にて検出されたトルク値が設定トルク値以上となると、挟持状態に切り換えたと判別して、図8(ニ)に示すように、挟持状態に維持して一対の挟持体24を突出位置から引退位置に引退作動させるべく、出退用電動モータ36を作動させ、且つ、コンベヤ23を搬送作動させるべく、コンベヤ用電動モータ30を作動させる。
その後、移載制御部51cは、物品Bを移載する側に近い方の第1在荷センサ48aにて物品Bの先端を検出してから設定時間経過すると、図8(ホ)に示すように、挟持状態から解除状態に切り換えるべく、接近離間用電動モータ36を作動させる。
また、移載制御部35cは、図8(へ)に示すように、物品Bを移載する側に遠い方の第2在荷センサ49bにて物品Bの先端を検出してから設定時間経過すると、コンベヤ23の搬送作動を停止させるべく、コンベヤ用電動モータ30の作動を停止させる。
次に、卸し処理における移載制御部51cによる動作について説明する。この場合には、上述した掬い処理における移載制御部51cによる動作とは逆の動作を行うことになるので、簡単に説明する。
前記移載制御部51cは、コンベヤ23を搬送作動させるべく、コンベヤ用電動モータ30を作動させ、図8(ホ)に示すように、物品Bを移載する側に遠い方の第1在荷センサ48bにて物品Bの後端を検出してから設定時間経過すると、解除状態から挟持状態に切り換えるべく、接近離間用電動モータ36を作動させる。
そして、移載制御部51cは、図8(ニ)(ハ)に示すように、挟持状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させるべく、出退用電動モータ36を作動させる。
突出位置検出センサにより一対の挟持体24が突出位置に位置したことが検出されると、移載制御部51cは、図8(ロ)に示すように、挟持状態から解除状態に切り換えるべく、接近離間用電動モータ36を作動させ、且つ、コンベヤ23の搬送作動を停止させるべく、コンベヤ用電動モータ30の作動を停止させる。
その後、移載制御部51cは、図8(イ)に示すように、解除状態に維持して一対の挟持体24を突出位置から引退位置に引退作動させるべく、出退用電動モータ36を作動させる。
前記移載制御部51cは、コンベヤ23を搬送作動させるべく、コンベヤ用電動モータ30を作動させ、図8(ホ)に示すように、物品Bを移載する側に遠い方の第1在荷センサ48bにて物品Bの後端を検出してから設定時間経過すると、解除状態から挟持状態に切り換えるべく、接近離間用電動モータ36を作動させる。
そして、移載制御部51cは、図8(ニ)(ハ)に示すように、挟持状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させるべく、出退用電動モータ36を作動させる。
突出位置検出センサにより一対の挟持体24が突出位置に位置したことが検出されると、移載制御部51cは、図8(ロ)に示すように、挟持状態から解除状態に切り換えるべく、接近離間用電動モータ36を作動させ、且つ、コンベヤ23の搬送作動を停止させるべく、コンベヤ用電動モータ30の作動を停止させる。
その後、移載制御部51cは、図8(イ)に示すように、解除状態に維持して一対の挟持体24を突出位置から引退位置に引退作動させるべく、出退用電動モータ36を作動させる。
前記移載制御部51cは、卸し処理において、コンベヤ23から収納部4及び荷載置台8に物品Bを移載するときに、挟持状態から解除状態に切り換えるわけであるが、このとき、位置検出センサ53の位置情報、及び、コンベヤ23から移載対象箇所としての収納部4及び荷載置台8に移載する物品Bの一対の挟持体24の接近離間方向における幅情報に基づいて、一対の挟持体24をその物品から設定距離離れた位置に離間させる形態で挟持状態から解除状態に切り換えるべく、接近離間用電動モータ36の作動を制御するように構成されている。
そして、移載制御部51cは、コンベヤ23から収納部4及び荷載置台8に移載する物品Bの一対の挟持体24の接近離間方向における幅情報として、コンベヤ23から収納部4及び荷載置台8に移載する物品Bに対して一対の挟持体24を接近作動させて挟持状態に切り換えたときの一対の挟持体24の位置情報を用いるように構成されている。
そして、移載制御部51cは、コンベヤ23から収納部4及び荷載置台8に移載する物品Bの一対の挟持体24の接近離間方向における幅情報として、コンベヤ23から収納部4及び荷載置台8に移載する物品Bに対して一対の挟持体24を接近作動させて挟持状態に切り換えたときの一対の挟持体24の位置情報を用いるように構成されている。
説明を加えると、移載制御部51cが、トルク検出センサ52にて検出されたトルク値が設定トルク値以上となると、挟持状態に切り換えたと判別するので、トルク検出センサ52にて検出されたトルク値が設定トルク値以上となったときの位置検出センサ53の位置情報を、その物品Bの一対の挟持体24の接近離間方向における幅情報として記憶する。
そして、移載制御部51cが、コンベヤ23から収納部4及び荷載置台8に物品Bを移載する際に挟持状態から解除状態に切り換えるときには、その物品Bの一対の挟持体24の接近離間方向における幅情報として、記憶しているその物品Bに対して一対の挟持体24を接近作動させて挟持状態に切り換えたときの一対の挟持体24の位置情報を用い、位置検出センサ53の検出情報に基づいて、一対の挟持体24をその物品Bから設定距離G離れた位置に離間させるべく、接近離間用電動モータ36を作動させる。
そして、移載制御部51cが、コンベヤ23から収納部4及び荷載置台8に物品Bを移載する際に挟持状態から解除状態に切り換えるときには、その物品Bの一対の挟持体24の接近離間方向における幅情報として、記憶しているその物品Bに対して一対の挟持体24を接近作動させて挟持状態に切り換えたときの一対の挟持体24の位置情報を用い、位置検出センサ53の検出情報に基づいて、一対の挟持体24をその物品Bから設定距離G離れた位置に離間させるべく、接近離間用電動モータ36を作動させる。
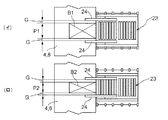
一対の挟持体24の接近離間方向における幅が大きな物品B1であるときには、図9(イ)に示すように、移載制御部51cが、その物品B1に対して一対の挟持体24を接近作動させて挟持状態に切り換えたときの一対の挟持体24の位置情報を、その物品B1の一対の挟持体24の接近離間方向における幅情報P1として記憶する。
そして、図10(イ)に示すように、移載制御部51cが、物品B1の一対の挟持体24の接近離間方向における幅情報P1から設定距離G離れた位置に一対の挟持体24を離間させることにより、挟持状態から解除状態に切り換える。
そして、図10(イ)に示すように、移載制御部51cが、物品B1の一対の挟持体24の接近離間方向における幅情報P1から設定距離G離れた位置に一対の挟持体24を離間させることにより、挟持状態から解除状態に切り換える。
一対の挟持体24の接近離間方向における幅が小さな物品B2であるとときには、図9(ロ)に示すように、移載制御部51cが、その物品B2に対して一対の挟持体24を接近作動させて挟持状態に切り換えたときの一対の挟持体24の位置情報を、その物品B2の一対の挟持体24の接近離間方向における幅情報P2として記憶する。
そして、図10(ロ)に示すように、移載制御部51cが、物品B2の一対の挟持体24の接近離間方向における幅情報P2から設定距離G離れた位置に一対の挟持体24を離間させることにより、挟持状態から解除状態に切り換える。
そして、図10(ロ)に示すように、移載制御部51cが、物品B2の一対の挟持体24の接近離間方向における幅情報P2から設定距離G離れた位置に一対の挟持体24を離間させることにより、挟持状態から解除状態に切り換える。
前記移載制御部51cは、収納部4及び荷載置台8からコンベヤ23に物品Bを移載するときに、その物品Bに対して一対の挟持体24を接近作動させて挟持状態に切り換えるので、このときに、その物品Bに対して一対の挟持体24を接近作動させて挟持状態に切り換えたときの一対の挟持体24の位置情報を、その物品Bの一対の挟持体24の接近離間方向における幅情報として記憶する。
具体的には、移載制御部51cが、トルク検出センサ52にて検出されたトルク値が設定トルク値以上となると、挟持状態に切り換えたと判別するので、トルク検出センサ52にて検出されたトルク値が設定トルク値以上となったときの位置検出センサ53の位置情報を、その物品Bの一対の挟持体24の接近離間方向における幅情報として記憶する。
具体的には、移載制御部51cが、トルク検出センサ52にて検出されたトルク値が設定トルク値以上となると、挟持状態に切り換えたと判別するので、トルク検出センサ52にて検出されたトルク値が設定トルク値以上となったときの位置検出センサ53の位置情報を、その物品Bの一対の挟持体24の接近離間方向における幅情報として記憶する。
荷載置台8に載置支持された物品Bを物品収納棚1に入庫するときには、まず、荷載置台8からコンベヤ23に物品Bを移載し、次に、その物品Bをコンベヤ23から収納部4に移載する。
したがって、移載制御部51cは、荷載置台8からコンベヤ23に物品Bを移載するときに、その物品Bの一対の挟持体24の接近離間方向における幅情報を記憶し、且つ、コンベヤ23から収納部4に物品Bを移載するときに、位置検出センサ53の位置情報、及び、記憶した物品Bの一対の挟持体24の接近離間方向における幅情報に基づいて、一対の挟持体24をその物品から設定距離離れた位置に離間させる形態で挟持状態から解除状態に切り換えるべく、接近離間用電動モータ36の作動を制御する。
したがって、移載制御部51cは、荷載置台8からコンベヤ23に物品Bを移載するときに、その物品Bの一対の挟持体24の接近離間方向における幅情報を記憶し、且つ、コンベヤ23から収納部4に物品Bを移載するときに、位置検出センサ53の位置情報、及び、記憶した物品Bの一対の挟持体24の接近離間方向における幅情報に基づいて、一対の挟持体24をその物品から設定距離離れた位置に離間させる形態で挟持状態から解除状態に切り換えるべく、接近離間用電動モータ36の作動を制御する。
また、物品収納棚1に収納されている物品Bを荷載置台8に出庫するときには、まず、収納部4からコンベヤ23に物品Bを移載し、次に、その物品Bをコンベヤ23から荷載置台8に移載する。
したがって、移載制御部51cは、収納部4からコンベヤ23に物品Bを移載するときに、その物品Bの一対の挟持体24の接近離間方向における幅情報を記憶し、且つ、コンベヤ23から荷載置台8に物品Bを移載するときに、位置検出センサ53の位置情報、及び、記憶した物品Bの一対の挟持体24の接近離間方向における幅情報に基づいて、一対の挟持体24をその物品から設定距離離れた位置に離間させる形態で挟持状態から解除状態に切り換えるべく、接近離間用電動モータ36の作動を制御する。
したがって、移載制御部51cは、収納部4からコンベヤ23に物品Bを移載するときに、その物品Bの一対の挟持体24の接近離間方向における幅情報を記憶し、且つ、コンベヤ23から荷載置台8に物品Bを移載するときに、位置検出センサ53の位置情報、及び、記憶した物品Bの一対の挟持体24の接近離間方向における幅情報に基づいて、一対の挟持体24をその物品から設定距離離れた位置に離間させる形態で挟持状態から解除状態に切り換えるべく、接近離間用電動モータ36の作動を制御する。
このように、荷載置台8に載置支持された物品Bを物品収納棚1に入庫するとき、及び、物品収納棚1に収納されている物品Bを荷載置台8に出庫するときには、収納部4及び荷載置台8からコンベヤ23に物品Bを移載するときに、その物品Bの一対の挟持体24の接近離間方向における幅情報を取得し、その物品Bをコンベヤ23から収納部4及び荷載置台8に移載するときに、取得した物品Bの一対の挟持体24の接近離間方向における幅情報をそのまま用いることができることになる。
したがって、物品Bの一対の挟持体24の接近離間方向における幅情報を取得するために、物品Bの幅を計測するための特別な動作を行う必要もなく、構成の簡素化を図ることができることになる。
したがって、物品Bの一対の挟持体24の接近離間方向における幅情報を取得するために、物品Bの幅を計測するための特別な動作を行う必要もなく、構成の簡素化を図ることができることになる。
前記掬い処理及び卸し処理における移載制御部51cによる動作について、図11及び図12のフローチャートに基づいて説明する。
まず、図11に基づいて掬い処理における動作について説明する。
前記移載制御部51cは、一対の挟持体24を物品Bから外側に離間させるように一対の挟持体24を離間させるべく、接近離間用電動モータ36を作動させて解除状態とする(ステップ1)。次に、移載制御部51cは、その解除状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させるべく、出退用電動モータ36を作動させる(ステップ2)。
そして、突出位置検出センサにより一対の挟持体24が突出位置に位置したことが検出されて突出作動が完了すると、移載制御部51cは、解除状態から挟持状態に切り換えるべく、接近離間用電動モータ36を作動させる(ステップ3,4)。
そして、移載制御部51cは、トルク検出センサ52にて検出されたトルク値が設定トルク値以上となると、位置検出センサ53の位置情報を、物品Bの一対の挟持体24の接近離間方向における幅情報として記憶し、挟持状態に維持して一対の挟持体24を突出位置から引退位置に引退作動させるべく、出退用電動モータ36を作動させ、且つ、コンベヤ23を搬送作動させるべく、コンベヤ用電動モータ30を作動させる(ステップ5〜7)。
その後、移載制御部51cは、物品Bを移載する側に近い方の第1在荷センサ48aにて物品Bの先端を検出してから設定時間経過して引退作動が完了すると、挟持状態から解除状態に切り換えるべく、接近離間用電動モータ36を作動させる(ステップ8,9)。
また、移載制御部35cは、物品Bを移載する側に遠い方の第2在荷センサ49bにて物品Bの先端を検出してから設定時間経過して移載が完了すると、コンベヤ23の搬送作動を停止させるべく、コンベヤ用電動モータ30の作動を停止させる(ステップ10,11)。
まず、図11に基づいて掬い処理における動作について説明する。
前記移載制御部51cは、一対の挟持体24を物品Bから外側に離間させるように一対の挟持体24を離間させるべく、接近離間用電動モータ36を作動させて解除状態とする(ステップ1)。次に、移載制御部51cは、その解除状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させるべく、出退用電動モータ36を作動させる(ステップ2)。
そして、突出位置検出センサにより一対の挟持体24が突出位置に位置したことが検出されて突出作動が完了すると、移載制御部51cは、解除状態から挟持状態に切り換えるべく、接近離間用電動モータ36を作動させる(ステップ3,4)。
そして、移載制御部51cは、トルク検出センサ52にて検出されたトルク値が設定トルク値以上となると、位置検出センサ53の位置情報を、物品Bの一対の挟持体24の接近離間方向における幅情報として記憶し、挟持状態に維持して一対の挟持体24を突出位置から引退位置に引退作動させるべく、出退用電動モータ36を作動させ、且つ、コンベヤ23を搬送作動させるべく、コンベヤ用電動モータ30を作動させる(ステップ5〜7)。
その後、移載制御部51cは、物品Bを移載する側に近い方の第1在荷センサ48aにて物品Bの先端を検出してから設定時間経過して引退作動が完了すると、挟持状態から解除状態に切り換えるべく、接近離間用電動モータ36を作動させる(ステップ8,9)。
また、移載制御部35cは、物品Bを移載する側に遠い方の第2在荷センサ49bにて物品Bの先端を検出してから設定時間経過して移載が完了すると、コンベヤ23の搬送作動を停止させるべく、コンベヤ用電動モータ30の作動を停止させる(ステップ10,11)。
次に、図12に基づいて卸し処理における動作について説明する。
前記移載制御部51cは、コンベヤ23を搬送作動させるべく、コンベヤ用電動モータ30を作動させ、物品Bを移載する側に遠い方の第1在荷センサ48bにて物品Bの後端を検出してから設定時間経過して挟持タイミングになると、解除状態から挟持状態に切り換えるべく、接近離間用電動モータ36を作動させる(ステップ21〜23)。
そして、移載制御部51cは、トルク検出センサ52にて検出されたトルク値が設定トルク値以上となると、挟持状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させるべく、出退用電動モータ36を作動させる(ステップ24,25)。
前記移載制御部51cは、突出位置検出センサにより一対の挟持体24が突出位置に位置したことが検出されて突出作動が完了すると、コンベヤ23の搬送作動を停止させるべく、コンベヤ用電動モータ30の作動を停止させる(ステップ27)。
そして、移載制御部51cは、挟持状態から解除状態に切り換えるべく、接近離間用電動モータ36を作動させるわけであるが、このとき、一対の挟持体24が物品Bから設定距離離れた位置に位置させるように、接近離間用電動モータ36を作動させる(ステップ28)。
前記移載制御部51cは、位置検出センサ53の位置情報に基づいて、一対の挟持体24が物品Bから設定距離離れた位置に位置して挟持状態から解除状態への作動が完了すると、接近離間用電動モータ36の作動を停止させる(ステップ29,30)。
その後、移載制御部51cは、解除状態に維持して一対の挟持体24を突出位置から引退位置に引退作動させるべく、出退用電動モータ36を作動させる(ステップ31)。
前記移載制御部51cは、コンベヤ23を搬送作動させるべく、コンベヤ用電動モータ30を作動させ、物品Bを移載する側に遠い方の第1在荷センサ48bにて物品Bの後端を検出してから設定時間経過して挟持タイミングになると、解除状態から挟持状態に切り換えるべく、接近離間用電動モータ36を作動させる(ステップ21〜23)。
そして、移載制御部51cは、トルク検出センサ52にて検出されたトルク値が設定トルク値以上となると、挟持状態に維持して一対の挟持体24を引退位置から突出位置に突出作動させるべく、出退用電動モータ36を作動させる(ステップ24,25)。
前記移載制御部51cは、突出位置検出センサにより一対の挟持体24が突出位置に位置したことが検出されて突出作動が完了すると、コンベヤ23の搬送作動を停止させるべく、コンベヤ用電動モータ30の作動を停止させる(ステップ27)。
そして、移載制御部51cは、挟持状態から解除状態に切り換えるべく、接近離間用電動モータ36を作動させるわけであるが、このとき、一対の挟持体24が物品Bから設定距離離れた位置に位置させるように、接近離間用電動モータ36を作動させる(ステップ28)。
前記移載制御部51cは、位置検出センサ53の位置情報に基づいて、一対の挟持体24が物品Bから設定距離離れた位置に位置して挟持状態から解除状態への作動が完了すると、接近離間用電動モータ36の作動を停止させる(ステップ29,30)。
その後、移載制御部51cは、解除状態に維持して一対の挟持体24を突出位置から引退位置に引退作動させるべく、出退用電動モータ36を作動させる(ステップ31)。
〔別実施形態〕
(1)上記実施形態では、物品移載装置12として、サイドクランプ式の物品移載装置を例示したが、例えば、サイドベルト式の物品移載装置など、その他各種の物品移載装置を適応することが可能である。
(1)上記実施形態では、物品移載装置12として、サイドクランプ式の物品移載装置を例示したが、例えば、サイドベルト式の物品移載装置など、その他各種の物品移載装置を適応することが可能である。
前記サイドベルト式の物品移載装置について説明すると、この物品移載装置は、図13に示すように、水平方向に接近離間自在で且つ物品を載置支持する載置板55側に引退させた引退位置と外部の移載対象箇所側に突出させた突出位置とに出退自在な一対の搬送用ベルト54を備えている。
そして、一対の搬送用ベルト54を接近作動させて物品を両横から挟持する挟持状態と一対の搬送用ベルト54を離間作動させて物品に対する挟持を解除する解除状態とに切り換え、一対の搬送用ベルト54を引退位置と突出位置とに出退駆動させ、及び、搬送用ベルト54を搬送作動させることによって、載置板55と移載対象箇所との間で物品を移載する。
そして、一対の搬送用ベルト54を接近作動させて物品を両横から挟持する挟持状態と一対の搬送用ベルト54を離間作動させて物品に対する挟持を解除する解除状態とに切り換え、一対の搬送用ベルト54を引退位置と突出位置とに出退駆動させ、及び、搬送用ベルト54を搬送作動させることによって、載置板55と移載対象箇所との間で物品を移載する。
説明を加えると、この物品移載装置は、物品を載置支持する載置板55と、物品を両横から挟持しながら搬送する一対の搬送用ベルト54とを備えている。そして、一対の搬送用ベルト54の接近離間方向と直交する移載方向に沿う案内レール56にて案内移動されるスライド台57が設けられ、そのスライド台57に、搬送用ベルト54を支持する一対の基枠58が接近離間移動自在に設けられている。
そして、スライド台57は、出退駆動手段が備える出退駆動用モータの駆動によって、移載方向に突出作動及び引退作動されるように構成され、基枠41は、挟持状態切換手段が備える挟持駆動用モータ59の駆動によって、接近作動及び離間作動されるように構成され、搬送用ベルト54が、搬送用モータ60の駆動によって、搬送作動されるように構成されている。
そして、スライド台57は、出退駆動手段が備える出退駆動用モータの駆動によって、移載方向に突出作動及び引退作動されるように構成され、基枠41は、挟持状態切換手段が備える挟持駆動用モータ59の駆動によって、接近作動及び離間作動されるように構成され、搬送用ベルト54が、搬送用モータ60の駆動によって、搬送作動されるように構成されている。
(2)上記実施形態では、移載制御部51cが、コンベヤ23から移載対象箇所に移載する物品Bの一対の挟持体24の接近離間方向における幅情報として、その物品Bに対して一対の挟持体24を接近作動させて挟持状態に切り換えたときの一対の挟持体24の位置情報を用いるようにしているが、例えば、荷載置台8に物品Bを搬入する際に、その物品Bの一対の挟持体24の接近離間方向における幅情報を計測して地上側コントローラ7に記憶させておき、地上側コントローラ7から物品Bの一対の挟持体24の接近離間方向における幅情報を通信することにより、移載制御部51cが物品Bの一対の挟持体24の接近離間方向における幅情報を取得するようにしてもよい。
すなわち、移載制御部51cが、物品Bの一対の挟持体24の接近離間方向における幅情報をどのようにして取得するかについては適宜変更が可能である。
すなわち、移載制御部51cが、物品Bの一対の挟持体24の接近離間方向における幅情報をどのようにして取得するかについては適宜変更が可能である。
(3)上記実施形態では、移載制御部51cが、接近離間用電動モータ22のトルク値が設定トルク値以上となると、挟持状態に切り換えたと判別しているが、例えば、一対の挟持体24の夫々に圧力センサを設けて、その圧力センサにて検出する圧力値が設定圧力値以上となると、挟持状態に切り換えたと判別することもでき、どのようにして挟持状態に切り換えたと判別するかは適宜変更が可能である。
(4)上記実施形態では、可動体34に対して挟持体24を出退する構成として、可動体34に対して挟持体24を一段だけ出退させる構成としているが、例えば、可動体34に対して出退自在な中間可動体を設け、その中間可動体に対して挟持体24を出退するように構成して、可動体34に対して挟持体24を多段階で出退できるようにすることもできる。
(5)上記実施形態では、搬送作動するコンベヤ23を設けているが、このコンベヤ23を設けることなく実施することも可能であり、この場合には、上記別実施形態(4)にて述べた如く、可動体34に対して挟持体24を多段階で出退できるようにして、挟持体24にてその出退方向の全幅にわたって物品Bを両横から挟持するように構成するのが好ましい。
(6)上記実施形態では、走行台車9の走行位置を検出する走行用ロータリエンコーダ22を設けているが、例えば、走行レール5の端部に設置された反射体に対して測定用光を投光することにより、走行レール5の端部から走行台車9までの距離を検出するレーザ測距計を走行台車9に設けて、このレーザ測距計にて走行台車9の走行位置を検出することもできる。
また、昇降台11の昇降位置を検出する昇降用ロータリエンコーダ19についても、これに代えて、上述の如く、レーザ測距計を用いることもできる。
また、昇降台11の昇降位置を検出する昇降用ロータリエンコーダ19についても、これに代えて、上述の如く、レーザ測距計を用いることもできる。
(7)上記実施形態では、昇降用電動モータ18や走行用電動モータ21などの各電動モータの作動を制御して、スタッカークレーン3の運転を制御するクレーン制御装置51をスタッカークレーン3に装備しているが、例えば、各電動モータの作動を制御するコントローラをスタッカークレーン3に装備せず、地上側コントローラ7、各電動モータにおけるインバータの間で通信ネットワークを構成し、地上側コントローラ7が、各電動モータにおけるインバータに対して、作動開始、速度指令、作動停止などの各種情報を通信ネットワークを介して指令することにより、スタッカークレーン3の運転を制御することもできる。
(8)上記実施形態では、物品収納棚1に対する物品Bの収納について、棚横幅方向における幅が同じ又はほぼ同じ物品Bを同一の物品載置板1bには載置支持させる形態で収納しているが、同一の物品載置板1bに棚横幅方向における幅が異なる複数の物品Bを載置支持させる形態で収納することも可能であり、物品収納棚1の物品載置板1bに対してどのように物品Bを収納させるかは適宜変更が可能である。
(9)上記実施形態では、本発明にかかる物品移載装置を装備した物品搬送装置として、スタッカークレーン3に適応した例を示したが、物品移載装置を装備して、複数の物品移載箇所にわたる走行経路を走行する走行車体を設けている物品搬送車に適応することも可能であり、各種の物品搬送装置に適応することが可能である。
1 物品収納棚
3 物品搬送車
4 収納部
8 入庫用荷受部及び出庫用荷受部
9 走行台車
10 昇降マスト
11 昇降台
23 本体載置部
24 挟持体
25 挟持状態切換手段
26 出退駆動手段
36 電動モータ
51 運転制御手段
51c 制御手段
3 物品搬送車
4 収納部
8 入庫用荷受部及び出庫用荷受部
9 走行台車
10 昇降マスト
11 昇降台
23 本体載置部
24 挟持体
25 挟持状態切換手段
26 出退駆動手段
36 電動モータ
51 運転制御手段
51c 制御手段
Claims (4)
- 水平方向に接近離間自在で且つ物品を載置支持する本体載置部側に引退させた引退位置と外部の移載対象箇所側に突出させた突出位置とに出退自在な一対の挟持体と、
前記一対の挟持体を接近作動させて物品を両横から挟持する挟持状態と前記一対の挟持体を離間作動させて物品に対する挟持を解除する解除状態とに切換自在な挟持状態切換手段と、
前記一対の挟持体を引退位置と突出位置とに出退駆動させる出退駆動手段と、
前記挟持状態切換手段の作動及び前記出退駆動手段の作動を制御する制御手段とが設けられ、
前記制御手段が、移載対象箇所から前記本体載置部に物品を移載するときには、前記解除状態に維持して前記一対の挟持体を引退位置から突出位置に突出作動させたのち、前記解除状態から前記挟持状態に切り換え、その後前記挟持状態に維持して前記一対の挟持体を突出位置から引退位置に引退作動させるべく、前記挟持状態切換手段の作動及び前記出退駆動手段の作動を制御するように構成され、且つ、
前記本体載置部から移載対象箇所に物品を移載するときには、前記挟持状態に維持して前記一対の挟持体を引退位置から突出位置に突出作動させたのち、前記挟持状態から前記解除状態に切り換え、その後前記解除状態に維持して前記一対の挟持体を突出位置から引退位置に引退作動させるべく、前記挟持状態切換手段の作動及び前記出退駆動手段の作動を制御するように構成されている物品移載装置であって、
前記制御手段が、前記本体載置部から移載対象箇所に物品を移載するときには、前記一対の挟持体の接近離間方向での位置を検出する位置検出手段の位置情報、及び、前記本体載置部から移載対象箇所に移載する物品の前記一対の挟持体の接近離間方向における幅情報に基づいて、前記一対の挟持体をその物品から設定距離離れた位置に離間させる形態で前記挟持状態から前記解除状態に切り換えるべく、前記挟持状態切換手段の作動を制御するように構成されている物品移載装置。 - 前記制御手段は、前記本体載置部から移載対象箇所に移載する物品の前記一対の挟持体の接近離間方向における幅情報として、前記本体載置部から移載対象箇所に移載する物品に対して前記一対の挟持体を接近作動させて前記挟持状態に切り換えたときの前記一対の挟持体の位置情報を用いるように構成されている請求項1に記載の物品移載装置。
- 前記挟持状態切換手段が、前記一対の挟持体を接近作動及び離間作動させる電動モータを備えて構成され、
前記制御手段は、前記電動モータの作動を制御することにより、前記挟持状態切換手段の作動を制御するように構成され、且つ、前記一対の挟持体を接近作動させたときに前記電動モータのトルク値が設定トルク値以上となると、前記挟持状態に切り換えたと判別するように構成されている請求項1または2に記載の物品移載装置。 - 走行台車とその走行台車から立設された昇降マストに沿って昇降駆動される昇降台を備えた物品搬送車における前記昇降台に、請求項1〜3のいずれか一項に記載の物品移載装置が装備され、
物品収納棚の棚横幅方向並びに上下幅方向に並ぶ収納部、入庫用荷受部、及び、出庫用荷受部の夫々を移載対象箇所として前記物品搬送車を運転する運転制御手段が設けられている物品収納設備。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005320961A JP2007126258A (ja) | 2005-11-04 | 2005-11-04 | 物品移載装置及び物品収納設備 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005320961A JP2007126258A (ja) | 2005-11-04 | 2005-11-04 | 物品移載装置及び物品収納設備 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007126258A true JP2007126258A (ja) | 2007-05-24 |
Family
ID=38149225
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005320961A Pending JP2007126258A (ja) | 2005-11-04 | 2005-11-04 | 物品移載装置及び物品収納設備 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007126258A (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009113965A (ja) * | 2007-11-08 | 2009-05-28 | Toyota Industries Corp | 移載装置及びその制御方法 |
| JP2011098800A (ja) * | 2009-11-04 | 2011-05-19 | Daifuku Co Ltd | 物品移載装置及び物品収納設備 |
| JP2011225373A (ja) * | 2010-03-29 | 2011-11-10 | Daifuku Co Ltd | 物品移載装置 |
| JP2012046300A (ja) * | 2010-08-26 | 2012-03-08 | Murata Machinery Ltd | 移載装置 |
| JP2012071932A (ja) * | 2010-09-28 | 2012-04-12 | Murata Machinery Ltd | 移載装置 |
| US8162585B2 (en) | 2007-07-26 | 2012-04-24 | Daifuku Co., Ltd. | Article storage facility |
| US9221604B2 (en) | 2008-09-05 | 2015-12-29 | Daifuku Co., Ltd. | Article storage facility and method of operation therefor |
| JP2020152566A (ja) * | 2019-03-22 | 2020-09-24 | 株式会社ダイフク | 物品搬送車 |
| CN113614005A (zh) * | 2019-03-29 | 2021-11-05 | 株式会社大福 | 移载装置 |
| CN115214446A (zh) * | 2022-09-13 | 2022-10-21 | 张家港极客嘉智能科技研发有限公司 | 一种基于智能化自动引导小车的可变式装夹装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06271013A (ja) * | 1993-03-24 | 1994-09-27 | Toyota Autom Loom Works Ltd | 自動倉庫のスタッカクレーン |
| JP2005219833A (ja) * | 2004-02-03 | 2005-08-18 | Toyota Industries Corp | 自動倉庫の制御装置 |
-
2005
- 2005-11-04 JP JP2005320961A patent/JP2007126258A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06271013A (ja) * | 1993-03-24 | 1994-09-27 | Toyota Autom Loom Works Ltd | 自動倉庫のスタッカクレーン |
| JP2005219833A (ja) * | 2004-02-03 | 2005-08-18 | Toyota Industries Corp | 自動倉庫の制御装置 |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8162585B2 (en) | 2007-07-26 | 2012-04-24 | Daifuku Co., Ltd. | Article storage facility |
| US8690509B2 (en) | 2007-07-26 | 2014-04-08 | Daifuku Co., Ltd. | Article storage facility |
| JP2009113965A (ja) * | 2007-11-08 | 2009-05-28 | Toyota Industries Corp | 移載装置及びその制御方法 |
| US9221604B2 (en) | 2008-09-05 | 2015-12-29 | Daifuku Co., Ltd. | Article storage facility and method of operation therefor |
| JP2011098800A (ja) * | 2009-11-04 | 2011-05-19 | Daifuku Co Ltd | 物品移載装置及び物品収納設備 |
| JP2011225373A (ja) * | 2010-03-29 | 2011-11-10 | Daifuku Co Ltd | 物品移載装置 |
| JP2012046300A (ja) * | 2010-08-26 | 2012-03-08 | Murata Machinery Ltd | 移載装置 |
| JP2012071932A (ja) * | 2010-09-28 | 2012-04-12 | Murata Machinery Ltd | 移載装置 |
| JP2020152566A (ja) * | 2019-03-22 | 2020-09-24 | 株式会社ダイフク | 物品搬送車 |
| WO2020196144A1 (ja) * | 2019-03-22 | 2020-10-01 | 株式会社ダイフク | 物品搬送車(article transport vehicle) |
| CN113544068A (zh) * | 2019-03-22 | 2021-10-22 | 株式会社大福 | 物品搬运车 |
| JP7063295B2 (ja) | 2019-03-22 | 2022-05-09 | 株式会社ダイフク | 物品搬送車 |
| EP3943415A4 (en) * | 2019-03-22 | 2023-01-04 | Daifuku Co., Ltd. | ARTICLE TRANSPORT VEHICLE |
| TWI822977B (zh) * | 2019-03-22 | 2023-11-21 | 日商大福股份有限公司 | 物品搬送車 |
| CN113614005A (zh) * | 2019-03-29 | 2021-11-05 | 株式会社大福 | 移载装置 |
| CN113614005B (zh) * | 2019-03-29 | 2023-06-30 | 株式会社大福 | 移载装置 |
| CN115214446A (zh) * | 2022-09-13 | 2022-10-21 | 张家港极客嘉智能科技研发有限公司 | 一种基于智能化自动引导小车的可变式装夹装置 |
| CN115214446B (zh) * | 2022-09-13 | 2022-11-29 | 张家港极客嘉智能科技研发有限公司 | 一种基于智能化自动引导小车的可变式装夹装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI435836B (zh) | 物品收納設備 | |
| EP1741644B1 (en) | Article storage facility | |
| JP6597061B2 (ja) | 物品搬送設備 | |
| JP4844824B2 (ja) | 物品保管設備 | |
| TWI491543B (zh) | 物品移載裝置及具有該裝置之堆高式起重機 | |
| JP2016052947A5 (ja) | ||
| JP2007126258A (ja) | 物品移載装置及び物品収納設備 | |
| JP2009214987A (ja) | 物品処理設備 | |
| JP4314521B2 (ja) | 物品搬送装置 | |
| JP2006182510A (ja) | スタッカクレーン | |
| JP3864803B2 (ja) | 格納設備 | |
| JP4618505B2 (ja) | 物品搬送装置 | |
| JP5435271B2 (ja) | 物品移載装置及び物品収納設備 | |
| JP5267856B2 (ja) | スタッカークレーン及び物品収納設備 | |
| JP4986047B2 (ja) | 物品収納設備 | |
| JP4666224B2 (ja) | 物品搬送設備 | |
| JP5316844B2 (ja) | 物品収納設備 | |
| JP4277204B2 (ja) | 物品搬送装置 | |
| JP5305080B2 (ja) | 物品収納設備 | |
| JPH11246005A (ja) | 物品移載装置 | |
| JP2000211705A (ja) | 物品移載装置 | |
| JP2006213442A (ja) | 物品搬送設備 | |
| JP2005075501A (ja) | 物品収納設備 | |
| JP2000191104A (ja) | 物品保管設備 | |
| JPH11199009A (ja) | 物品移載装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Effective date: 20071221 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A977 | Report on retrieval |
Effective date: 20100921 Free format text: JAPANESE INTERMEDIATE CODE: A971007 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100930 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110210 |