JP2005260357A - Image recorder/reproducer, recording/reproducing method and program - Google Patents
Image recorder/reproducer, recording/reproducing method and program Download PDFInfo
- Publication number
- JP2005260357A JP2005260357A JP2004066050A JP2004066050A JP2005260357A JP 2005260357 A JP2005260357 A JP 2005260357A JP 2004066050 A JP2004066050 A JP 2004066050A JP 2004066050 A JP2004066050 A JP 2004066050A JP 2005260357 A JP2005260357 A JP 2005260357A
- Authority
- JP
- Japan
- Prior art keywords
- image
- field
- shooting
- correction
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





















Landscapes
- Television Signal Processing For Recording (AREA)
- Studio Devices (AREA)
Abstract
Description
本発明は、画像記録再生装置、画像記録再生方法、及びプログラムに関し、特に、インタレース走査ビデオ信号を非インタレースに変換して記録及び再生する画像記録再生装置、該画像記録再生装置に適用される画像記録再生方法、及び該画像記録再生方法をコンピュータに実行させるためのプログラムに関する。 The present invention relates to an image recording / reproducing apparatus, an image recording / reproducing method, and a program, and more particularly to an image recording / reproducing apparatus that converts an interlaced scanning video signal into non-interlaced recording and reproduction, and the image recording / reproducing apparatus. The present invention relates to an image recording / reproducing method and a program for causing a computer to execute the image recording / reproducing method.
主要な放送基準に従ってフォーマットされたテレビ信号は、インタレース走査ビデオ信号となっている。インタレース走査ビデオ信号では、画像フレームが2つのインタリーブされたフィールドとして表示される。第1のフィールドは画像フレームの奇数ラインを含み、第2のフィールドは画像フレームの偶数ラインを含む。NTSC基準に従ってフォーマットされたビデオ信号は、連続的なフィールドの間で1/60秒のフィールド間隔を有する。 Television signals formatted according to major broadcast standards are interlaced scanning video signals. In an interlaced scanning video signal, an image frame is displayed as two interleaved fields. The first field contains the odd lines of the image frame and the second field contains the even lines of the image frame. A video signal formatted according to the NTSC standard has a 1/60 second field interval between consecutive fields.
これに対して、非インタレース走査ビデオ信号であるプログレッシブ走査ビデオ信号は、水平走査を1本おきに行なうことなく、画像全体を左から右への水平走査と、上から下への垂直走査を順次に行なうことによって得られる信号であり、画像全体を1回の走査で信号化できるために、静止画撮影用のデジタルスチルカメラにおける撮像素子CCDの読み取り信号として用いられる。 On the other hand, a progressive scan video signal, which is a non-interlaced scan video signal, performs horizontal scan from left to right and vertical scan from top to bottom without performing horizontal scan every other line. This is a signal obtained by performing sequentially, and can be converted into a signal by scanning once, so that it is used as a read signal of the image sensor CCD in a digital still camera for still image shooting.
ところで、インタレース走査ビデオ信号をプログレッシブ走査ビデオ信号に変換するシステムが存在するが、こうした変換システムでは、2つのフィールドが表示されたとき、現在のフィールドからの現在のラインを、現在のラインの真上にある前のフィールドのラインと現在のラインの真下にある前のフィールドのラインとに連続的に平均化することによって、プログレッシブフレームに対する画像ラインを補間することが行われている(例えば、特許文献1参照)。 By the way, there are systems that convert interlaced scanning video signals to progressive scanning video signals. In such conversion systems, when two fields are displayed, the current line from the current field is converted to the true of the current line. Interpolating image lines for progressive frames has been done by continuously averaging the previous field line above and the previous field line directly below the current line (e.g., patents). Reference 1).
また、時間的に前後のインタレース画像を再生装置に要求して取り込み、これらのインタレース画像を用いて、動き補償プログレッシブ変換を行なうようにした動き補償予測符号化装置が存在する(例えば、特許文献2参照)。
しかしながら、特許文献1に示されるような従来システムでは、時間的に1フィールド前で、空間的に上下隣接のラインを遅延したラインと現在のラインとを合計回路で合計してライン補間しているので、1ライン以上ずれる動きのある映像では補間ができないという問題があった。 However, in the conventional system as shown in Patent Document 1, the line which interpolated the spatially delayed upper and lower adjacent lines and the current line is summed by a summing circuit one line before in time, and line interpolation is performed. As a result, there is a problem that interpolation cannot be performed for an image that moves by more than one line.
また、特許文献2に示されるような従来の動き補償予測符号化装置では、動き補償プログレッシブ変換が動きベクトルを検出してフィードバックするため、遅れが残ってしまい、動きのある被写体映像をプログレッシブ再生すると、被写体部分でフィールド間にギザギザが発生してしまうという問題点があった。 Further, in the conventional motion compensation predictive coding apparatus as shown in Patent Document 2, since motion compensation progressive conversion detects and feeds back a motion vector, there is a delay, and when a subject image with motion is progressively reproduced. There is a problem that the object portion has jaggedness between the fields.
本発明はこのような問題点に鑑みてなされたものであって、動きのある被写体映像を非インタレース再生しても、被写体部分でフィールド間にギザギザが発生しないようにした画像記録再生装置、画像記録再生方法、及びプログラムを提供することを目的とする。 The present invention has been made in view of such problems, and an image recording / reproducing apparatus that prevents jaggedness between fields in a subject portion even when non-interlaced reproduction of a moving subject image is performed, An object of the present invention is to provide an image recording / reproducing method and a program.
上記目的を達成するために、請求項1記載の発明によれば、インタレース走査によって第1及び第2のフィールドの画像信号を生成する撮像手段と、自装置の振れを検出して検出信号を出力する振れ検出手段と、前記撮像手段によって生成された画像信号と前記振れ検出手段によって出力された検出信号とに基づき、所定の撮影手法による撮影中であるか否かを判断する判断手段と、前記判断手段によって前記所定の撮影手法による撮影中であると判断されたとき、前記振れ検出手段によって出力された検出信号と、前記撮像手段における被写体焦点情報とから、第1フィールド撮影時点と第2フィールド撮影時点との間に発生した自装置の被写体に対する振れを相殺するためのフィールド振れ補正量を算出するフィールド揺量算出手段とを有することを特徴とする画像記録装置が提供される。 In order to achieve the above object, according to the first aspect of the present invention, the image pickup means for generating the image signals of the first and second fields by interlace scanning and the detection signal by detecting the shake of the own apparatus. A shake detection unit that outputs, a determination unit that determines whether or not shooting is performed by a predetermined shooting method based on the image signal generated by the imaging unit and the detection signal output by the shake detection unit; When it is determined by the determining means that the image is being shot by the predetermined shooting method, the first field shooting time point and the second field shooting time are obtained from the detection signal output by the shake detecting means and the subject focus information in the image pickup means. A field fluctuation amount calculating means for calculating a field shake correction amount for canceling out the shake of the subject apparatus that occurred between the time of field shooting and the subject. Image recording apparatus is provided which is characterized in that.
また、請求項6記載の発明によれば、インタレース走査によって第1及び第2のフィールドの画像信号を生成する撮像手段と、画角変更指令信号に従い画角を変更する変倍撮影手段と、前記撮像手段によって生成された画像信号と前記変倍撮影手段へ入力される画角変更指令信号とに基づき、所定の撮影手法による撮影中であるか否かを判断する判断手段と、前記判断手段によって前記所定の撮影手法による撮影中であると判断されたとき、前記変倍撮影手段の変倍速度から、第1フィールド撮影時点と第2フィールド撮影時点との間に発生した前記変倍撮像手段による画角の変更量を相殺するためのフィールド変倍補正量を算出するフィールド変倍量算出手段とを有することを特徴とする画像記録装置が提供される。 According to the invention described in claim 6, the imaging means for generating the image signals of the first and second fields by interlace scanning, the variable magnification imaging means for changing the angle of view according to the angle of view change command signal, A determination unit that determines whether or not an image is being shot by a predetermined shooting method based on an image signal generated by the image pickup unit and an angle-of-view change command signal input to the variable magnification shooting unit; and the determination unit When it is determined that the image is being shot by the predetermined shooting method, the zoom imaging means generated between the first field shooting time and the second field shooting time is determined from the zoom speed of the zoom shooting means. There is provided an image recording apparatus comprising: a field scaling amount calculating unit that calculates a field scaling correction amount for canceling out the change amount of the angle of view.
また、請求項7記載の発明によれば、インタレース走査によって画像信号を生成する撮像手段と、変倍撮影光学系の画角を制御する画角制御手段と、前記撮像手段によって生成された画像信号と前記画角制御手段による画角制御状態とに基づき、所定の撮影手法による撮影中であるか否かを判断する判断手段とを有し、前記画角制御手段は、前記判断手段によって前記所定の撮影手法による撮影中であると判断されたとき、1フレーム単位で画角制御を行なうことを特徴とする画像記録装置が提供される。 According to the seventh aspect of the present invention, the imaging means for generating an image signal by interlace scanning, the angle of view control means for controlling the angle of view of the variable magnification optical system, and the image generated by the imaging means Based on the signal and the angle-of-view control state by the angle-of-view control means, determining means for determining whether or not shooting is being performed by a predetermined shooting method, and the angle-of-view control means is There is provided an image recording apparatus characterized by performing angle-of-view control in units of one frame when it is determined that shooting is being performed by a predetermined shooting method.
また、請求項11記載の発明によれば、インタレース走査による第1及び第2のフィールドの画像データを取得するとともに、前記第1のフィールドの撮影時点と前記第2のフィールドの撮影時点との間に画像記録装置が被写体に対して揺れた量を相殺するためのフィールド振れ補正量を副データとして取得する補正データ取得手段と、インタレース表示向けの手ぶれ画像抽出範囲に、前記補正データ取得手段によって取得されたフィールド振れ補正量を加算して画像抽出範囲を決定する非インタレース補正手段と、前記補正データ取得手段によって取得された画像データから、前記非インタレース補正手段によって決定された画像抽出範囲に位置する画像データを抽出して、前記画像記録装置が被写体に対して揺れた量が相殺された再生信号を生成する再生信号生成手段とを有することを特徴とする画像再生装置が提供される。 According to the invention of claim 11, the image data of the first and second fields are acquired by interlace scanning, and the shooting time of the first field and the shooting time of the second field are obtained. A correction data acquisition unit that acquires, as sub-data, a field shake correction amount for canceling out the amount of shaking of the image recording apparatus with respect to the subject, and the correction data acquisition unit in a camera shake image extraction range for interlaced display A non-interlace correction unit that determines an image extraction range by adding the field shake correction amount acquired by the image extraction method, and an image extraction determined by the non-interlace correction unit from the image data acquired by the correction data acquisition unit. Image data located in a range is extracted, and a reproduction signal in which the amount of shaking of the image recording apparatus with respect to the subject is canceled Image reproducing apparatus is provided which is characterized by having a reproduction signal generating means for generating a.
また、請求項12記載の発明によれば、インタレース走査による第1及び第2のフィールドの画像データを取得するとともに、前記第1のフィールドの撮影時点と前記第2のフィールドの撮影時点との間に画像記録装置が被写体に対して変倍した画角量を相殺するためのフィールド変倍補正量を副データとして取得する補正データ取得手段と、前記補正データ取得手段によって取得されたフィールド振れ補正量に基づき、前記第1及び第2のフィールドでの画角量が同じなるように画像抽出範囲を決定する非インタレース補正手段と、前記補正データ取得手段によって取得された画像データから、前記非インタレース補正手段によって決定された画像抽出範囲に位置する画像データを抽出して、前記画像記録装置が被写体に対して変倍した画角量が相殺された再生信号を生成する再生信号生成手段とを有することを特徴とする画像再生装置が提供される。 According to the twelfth aspect of the present invention, the image data of the first and second fields is acquired by interlace scanning, and the shooting time of the first field and the shooting time of the second field are obtained. A correction data acquisition unit that acquires, as sub-data, a field scaling correction amount for offsetting the angle of view that the image recording apparatus has zoomed with respect to the subject, and a field shake correction acquired by the correction data acquisition unit A non-interlace correction unit that determines an image extraction range based on the amount so that the field angle amounts in the first and second fields are the same, and the image data acquired by the correction data acquisition unit. The image data located in the image extraction range determined by the interlace correction means is extracted, and the image recording apparatus scales the subject. Image reproducing apparatus is provided which is characterized by having a reproduction signal generating means for generating a reproduction signal amount is canceled.
さらに、上記画像記録装置または画像再生装置にそれぞれ適用される画像記録方法または画像再生方法、及び該画像記録方法または画像再生方法をコンピュータに実行させるためのプログラムが提供される。 Furthermore, an image recording method or an image reproduction method applied to the image recording apparatus or the image reproduction apparatus, respectively, and a program for causing a computer to execute the image recording method or the image reproduction method are provided.
本発明の請求項1記載の画像記録装置によれば、インタレース走査によって得たパンニング撮影中の被写体映像を非インタレース再生しても被写体部分でフィールド間のギザギザが発生しないという効果がある。 According to the image recording apparatus of the first aspect of the present invention, there is an effect that the jaggedness between fields does not occur in the subject portion even if the subject video during panning photographing obtained by interlace scanning is reproduced non-interlaced.
本発明の請求項6、7記載の画像記録装置によれば、インタレース走査によって得たズーミング撮影中の被写体映像を非インタレース再生しても被写体部分でフィールド間の二重画が発生しないという効果がある。 According to the image recording apparatus of the sixth and seventh aspects of the present invention, even if the subject video image during zooming shooting obtained by interlace scanning is reproduced in a non-interlace manner, a double image between fields is not generated in the subject portion. effective.
本発明の請求項11記載の画像再生装置によれば、パンニング撮影されたインタレース走査記録の被写体映像であっても、非インタレース再生する時は被写体部分でフィールド間のギザギザが発生しないという効果がある。 According to the image reproducing device of the present invention, even when the subject image is recorded by interlaced scanning that is panned, the non-interlaced reproduction does not cause jaggedness between fields in the subject portion. There is.
本発明の請求項12記載の画像再生装置によれば、ズーミング撮影されたインタレース走査記録の被写体映像であっても、非インタレース再生する時は被写体部分でフィールド間の二重画が発生しないという効果がある。 According to the image reproducing device of the present invention, even if the subject image is recorded by interlaced scanning that has been zoomed, a double image between fields does not occur in the subject portion during non-interlaced reproduction. There is an effect.
以下、本発明を実施するための最良の形態について、図面を参照して説明する。 The best mode for carrying out the present invention will be described below with reference to the drawings.
〔第1の実施の形態〕
図1は、本発明の第1の実施の形態に係る画像記録再生装置の構成を示すブロック図である。この画像記録再生装置は、インタレース走査によってビデオ信号を作成し、該ビデオ信号を非インタレース再生(プログレッシブ再生)することが可能な装置である。
[First Embodiment]
FIG. 1 is a block diagram showing a configuration of an image recording / reproducing apparatus according to the first embodiment of the present invention. This image recording / reproducing apparatus is an apparatus capable of generating a video signal by interlace scanning and performing non-interlaced reproduction (progressive reproduction) of the video signal.
図1において100は撮像部であり、図示しないズームレンズ装置、フォーカスレンズ装置および光学式手ぶれ補正装置と撮像素子とからなる。101は、撮像部100のズーム状態やフォーカス状態を検出する焦点検出部、102は、振動ジャイロからなり、撮像部100の揺れを検出する振れ検出部、103は、撮像部100の揺れがパンニングやチルティングによるものであるか否かを判断するパンニング判断部、104は、画像取得範囲を制御する振れ補正制御部、105はフィールド揺量算出部であり、フィールド揺量算出部105は、振れ検出部102の出力と焦点検出部101の出力とから振れ補正制御量を算出する。
In FIG. 1,
106は、ズーム状態や画像取得範囲によって画角を制御する画角制御部、107は、画角制御部106による画角制御がズームインやズームアウトであるか否かを判断するズーミング判断部、108は、焦点検出部101の出力からフィールド変倍量を算出するフィールド変倍量算出部である。
106 is an angle-of-view control unit that controls the angle of view according to the zoom state and image acquisition range, and 107 is a zooming determination unit that determines whether the angle-of-view control by the angle-of-
109は補正メタデータ付加取得部であり、記録時には、フィールド揺れ量算出部105の出力やフィールド変倍量算出部108の出力を画像情報とともに補正メタデータとして付加し、再生時には、再び画像情報とともに取得する。110は記録再生部、111は非インタレース補正部であり、非インタレース補正部111は、記録再生部110から出力されたインタレース信号を、補正メタデータ付加取得部109から得られた補正データに基づき画像切出しを行い、非インタレース信号に補正する。112は非インタレース表示器、113はインタレース表示器である。
なお、図1に示す画像記録再生装置は、例えば中央演算装置(CPU)、CPUが実行するプログラムを記憶するROM(Read Only Memory)、CPUが演算に使用するRAM(Random Access Memory)、入出力装置等から構成され、図1に示す撮像部100、焦点検出部101、振れ検出部102、非インタレース表示器112、インタレース表示器113、及び記録再生部110の一部を除く各部は、CPUがプログラムを実行することによって実現される各機能を示すものである。
1 includes, for example, a central processing unit (CPU), a ROM (Read Only Memory) storing a program executed by the CPU, a RAM (Random Access Memory) used by the CPU for calculation, an input / output The components other than the
図2は、画像記録再生装置で実行される、撮像部100に含まれる光学式手ぶれ補正装置に対する振れ補正制御処理の手順を示すフローチャートである。
FIG. 2 is a flowchart illustrating a procedure of shake correction control processing performed by the image recording / playback apparatus for the optical camera shake correction apparatus included in the
なお、光学式手ぶれ補正装置は、例えば特開平2−173625号公報(特許第2801013号)や特開平6−82889号公報で開示される構成が知られており、本実施の形態では、光学式手ぶれ補正装置自体の構成や制御についての説明は省略し、本実施の形態の主眼たる光軸制御目標生成について説明する。 In addition, the optical camera shake correction device has a configuration disclosed in, for example, Japanese Patent Laid-Open No. 2-173625 (Japanese Patent No. 2801013) and Japanese Patent Laid-Open No. 6-82889, and in this embodiment, an optical type is described. Description of the configuration and control of the camera shake correction device itself will be omitted, and generation of the optical axis control target that is the main focus of the present embodiment will be described.
図2におけるステップS200にて、パンニング判断部103に振れ検出部102から、撮像部100の揺れを示すジャイロ信号が入力されているか否か、つまり撮像部100が揺れているか否かを、パンニング判断部103が判断する。ジャイロ信号の入力が無ければステップS202へ処理を移す。例えば画像記録再生装置を三脚に固定している場合などはステップS202へ処理が移される。ジャイロ信号の入力がある場合はステップS201へ処理を移す。
In step S200 in FIG. 2, it is determined whether the panning determination unit 103 receives a gyro signal indicating the shaking of the
ステップS202では、撮像部100は揺れていないと判断されたので、現在のフィールド揺れ量を変えず、画像取得範囲を制御する振れ補正制御部104は現状の光軸を維持し、光学式手ぶれ補正装置の制御目標を変えないようにする。
In step S202, since it is determined that the
ステップS201では、パンニング判断部103が、振れ検出部102から入力されたジャイロ信号の信号変動を所定範囲と比較し、信号変動が所定範囲内に収まっているか否か、つまり撮像部100が一定速度で振られている状態(パンニングやチルティングの場合)か、または撮像部100が不規則に揺れている状態(手ぶれ状態)かを判断する。信号変動が所定範囲内に収まっていなければステップS214へ処理を移す。信号変動が所定範囲内に収まっていればステップS203へ処理を移す。
In step S201, the panning determination unit 103 compares the signal variation of the gyro signal input from the
ステップS203では、パンニング判断部103が、撮像部100から入力された画像の動きベクトルを所定レベルと比較し、動きベクトルが所定レベルより大きいか否かを判断する。動きベクトルが所定レベル以下であれば、すなわち、被写体を追尾撮影していて画面に対して被写体位置があまり変わらず、動きベクトルが小さい場合には、ステップS214へ処理を移す。動きベクトルが所定レベルより大きいならばステップS204へ処理を移す。
In step S203, the panning determination unit 103 compares the motion vector of the image input from the
ステップS204では、フィールド揺れ量算出部105が、現在得られているフィールドがBフィールドであるか否かを判断する。なお、本画像記録再生装置は、インタレース走査を行なって1画面に対して2つのフィールドを得るようにし、その2つのフィールドのうちの前半のフィールドをAフィールド、後半のフィールドをBフィールドとする。上記判断の結果、BフィールドでなければステップS214へ処理を移し、Bフィールドであった場合ステップS205へ処理を移す。
In step S204, the field fluctuation
ステップS205では、フィールド揺れ量算出部105が、現在のタイミングがBフィールドの先頭であるか否かを判断する。Bフィールド先頭でない場合ステップS211へ処理を移し、Bフィールド先頭であった場合ステップS206へ処理を移す。
In step S205, the field fluctuation
ステップS206では、フィールド揺れ量算出部105が焦点検出部101からズームレンズ位置情報を取得して、ステップS207へ処理を移す。
In step S206, the field fluctuation
ステップS207では、フィールド揺れ量算出部105が焦点検出部101からフォーカスレンズ位置情報を取得して、ステップS208へ処理を移す。
In step S207, the field fluctuation
ステップS208では、フィールド揺れ量算出部105が、ズームレンズ位置情報とフォーカスレンズ位置情報とから被写体焦点情報を算出して、ステップS209へ処理を移す。
In step S208, the field fluctuation
ステップS209では、フィールド揺れ量算出部105が、振れ検出部102から得たジャイロ信号を基にパンニング速度を算出して、ステップS210へ処理を移す。
In step S209, the field shake
ステップS210では、フィールド揺れ量算出部105が、被写体焦点情報とパンニング速度とからフィールドぶれ光軸補正値を算出して、ステップS211へ処理を移す。このフィールドぶれ光軸補正値は、フィールド間の画像ぶれを補正するために行われる光軸偏向の偏向量を示す。なお、レンズの画角仕様によって、パンニング速度を1フィールド当たりの光軸偏向量に換算することができる。これを、図3を参照して説明する。
In step S210, the field fluctuation
図3は、被写体とレンズと撮像素子との相互位置関係を示す図であり、レンズの画角とパンニング速度と光軸との関係を説明するための図である。 FIG. 3 is a diagram illustrating a mutual positional relationship among the subject, the lens, and the image sensor, and is a diagram for explaining a relationship among the angle of view of the lens, the panning speed, and the optical axis.
光学式手ぶれ補正装置では、手ぶれ補正を、光軸を偏向することによって行なうので、図3に示すように、レンズ位置PLに対して被写体位置がPOであり、広角側撮影では焦点距離がDW、撮像素子の位置がPWであり、一方、望遠側撮影では焦点距離がDT、撮像素子の位置がPTであるものとする。広角側撮影では画角がWA、光学画角がθWになる。広角側撮影において、パンニング速度を1フィールドの光軸偏向量に換算して、補正角度がΔθ1であった場合、画角はWAからWBに補正される。但しWA=WBである。なお、ズーム率が大きくなるほど焦点距離が長くなる。 In the optical camera shake correction device, camera shake correction is performed by deflecting the optical axis. Therefore, as shown in FIG. 3, the subject position is PO with respect to the lens position P L , and the focal length is wide-angle shooting. It is assumed that D W and the position of the image sensor are P W , while the focal length is D T and the position of the image sensor is P T in telephoto shooting. In wide-angle shooting, the field angle is W A and the optical field angle is θ W. The wide-angle side imaging, the panning speed in terms of the optical axis deflection amount of one field, if the correction angle is a [Delta] [theta] 1, the angle of view is corrected from W A to W B. However, W A = W B. Note that the focal length increases as the zoom ratio increases.
一方、望遠側撮影では画角がTA、光学画角がθTになる。撮像素子のサイズSは同一なので、焦点距離が望遠側になるほど光学画角θが狭くなる。そこで望遠側撮影において、パンニング速度を1フィールドの光軸偏向量に換算して、補正角度がΔθ2であった場合、補正角度Δθ2は下記式(1)に基づき算出できる。 On the other hand, in telephoto shooting, the field angle is T A and the optical field angle is θ T. Since the image sensors have the same size S, the optical field angle θ becomes narrower as the focal length becomes telephoto. Therefore, in the telephoto side photographing, when the panning speed is converted into the optical axis deflection amount of one field and the correction angle is Δθ 2 , the correction angle Δθ 2 can be calculated based on the following formula (1).
Δθ2=Δθ1×(DW/DT) ・・・(1)
望遠側撮影では画角がTAからTBに補正される。但しTA=TBである。
Δθ 2 = Δθ 1 × (D W / D T ) (1)
In telephoto shooting, the angle of view is corrected from T A to T B. However, T A = T B.
図2に戻ってステップS211では、振れ補正制御部104が、振れ検出部102から出力されたジャイロ信号を基に、フィールドぶれ光軸補正を行なわないインタレース表示向けの手ぶれ光軸補正値を算出して、ステップS212へ処理を移す。
Returning to FIG. 2, in step S <b> 211, the shake
ステップS212では、振れ補正制御部104が、インタレース表示向けの手ぶれ光軸補正値に、ステップS210で算出されたフィールドぶれ光軸補正値を加算して、ステップS213へ処理を移す。
In step S212, the shake
ステップS214では、振れ補正制御部104が、振れ検出部102から出力されたジャイロ信号を基に、フィールドぶれ光軸補正を行なわない手ぶれ光軸補正値を算出して、ステップS213へ処理を移す。
In step S214, the shake
ステップS213では、振れ補正制御部104が、ステップS212で算出された加算値またはステップS214で算出された手ぶれ光軸補正値を用いて、撮像部100に含まれる光学式手ぶれ補正装置の光軸目標値を更新する。撮像部100の光学式手ぶれ補正装置は、更新された光軸目標値にサーボ制御をかける。
In step S213, the shake
以上のように、撮像部100に含まれる光学式手ぶれ補正装置に対して振れ補正制御を行なうことにより、次のような効果を得られる。
As described above, by performing the shake correction control on the optical camera shake correction device included in the
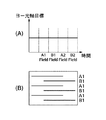
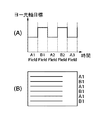
図4(A)は、1つの画面に対する2つのフィールド(A,B)における従来のヨー方向の光軸目標値を示す図、図4(B)は、2つのフィールドによる従来のフィールドぶれを示す図である。また、図5(A)は、2つのフィールド(A,B)における本実施の形態でのヨー方向の光軸目標値を示す図、図5(B)は、2つのフィールドによる本実施の形態でのフィールドぶれを示す図である。 4A shows a conventional optical axis target value in the yaw direction in two fields (A, B) for one screen, and FIG. 4B shows a conventional field blur due to two fields. FIG. FIG. 5A is a diagram showing the optical axis target value in the yaw direction in the present embodiment in two fields (A, B), and FIG. 5B is the present embodiment with two fields. It is a figure which shows the field blurring in.
すなわち、従来のインタレース表示向け手ぶれ補正では、図4(A)に示すように、パンニング撮影した時に、ヨー方向の光軸目標値が一定であって、したがって、図4(B)に示すように、AフィールドとBフィールドとの間にフィールドぶれが発生する。これに対して本実施の形態では、図5(A)に示すように、Bフィールドのずれ量を焦点情報、パンニング速度から算出して、インタレース表示向けの手ぶれ補正値に加算して光軸補正する。これにより、図5(B)に示すように、AフィールドとBフィールドとの間でフィールドぶれを打ち消すことができ、このように動きのある被写体映像をプログレッシブ再生しても、被写体部分でフィールド間のギザギザが発生しないという効果がある。 That is, in the conventional camera shake correction for interlaced display, as shown in FIG. 4A, when panning photographing is performed, the optical axis target value in the yaw direction is constant, and therefore, as shown in FIG. In addition, field blur occurs between the A field and the B field. On the other hand, in the present embodiment, as shown in FIG. 5A, the amount of deviation of the B field is calculated from the focus information and the panning speed, and is added to the camera shake correction value for interlaced display. to correct. As a result, as shown in FIG. 5B, field blur can be canceled between the A field and the B field, and even if the subject video with movement is progressively reproduced as described above, There is an effect that no jaggedness is generated.
なお、本実施の形態では、ヨー方向の光軸補正を説明したが、ピッチ方向の光軸補正機構を備えるようにすれば、ピッチ方向に対しても同様に光軸補正を行うことができる。ヨー方向とピッチ方向とを同時に光軸補正すれば、360度のどの方向のフィールドぶれにも対応できる。 In the present embodiment, the optical axis correction in the yaw direction has been described. However, if an optical axis correction mechanism in the pitch direction is provided, the optical axis correction can be similarly performed in the pitch direction. If the optical axis is corrected at the same time in the yaw direction and the pitch direction, it is possible to deal with field blur in any direction of 360 degrees.
〔第2の実施の形態〕
次に、本発明の第2の実施の形態を説明する。
[Second Embodiment]
Next, a second embodiment of the present invention will be described.
第2の実施の形態の構成は、基本的に第1の実施の形態の構成と同じであるので、第2の実施の形態の説明においては、第1の実施の形態の構成と同一部分には同一の参照符号を付して、第1の実施の形態の説明を流用し、異なる部分だけを説明する。 Since the configuration of the second embodiment is basically the same as the configuration of the first embodiment, in the description of the second embodiment, the same parts as the configuration of the first embodiment are used. Are denoted by the same reference numerals, and the description of the first embodiment is used, and only different portions will be described.
第2の実施の形態では、撮像部100が電子補正式手ぶれ補正装置を内蔵しているものとする。電子補正式手ぶれ補正装置については、例えば特開平11−266390号公報にその構成が開示されており、本実施の形態では、電子補正式手ぶれ補正装置自体の構成や制御についての説明は省略し、本実施の形態の主眼たる電子補正式手ぶれ補正装置の制御目標生成について説明する。
In the second embodiment, it is assumed that the
図6は、第2の実施の形態における画像記録再生装置で実行される、撮像部100に含まれる電子補正式手ぶれ補正装置に対する振れ補正制御処理の手順を示すフローチャートである。
FIG. 6 is a flowchart illustrating a procedure of shake correction control processing for the electronic correction type image stabilization device included in the
ステップS400にて、パンニング判断部103に振れ検出部102から、撮像部100の揺れを示すジャイロ信号が入力されているか否か、つまり撮像部100が揺れているか否かを、パンニング判断部103が判断する。ジャイロ信号の入力が無ければステップS402へ処理を移す。例えば画像記録再生装置を三脚に固定している場合などはステップS402へ処理が移される。ジャイロ信号の入力がある場合はステップS401へ処理を移す。
In step S400, the panning determination unit 103 determines whether or not the gyro signal indicating the shaking of the
ステップS402では、撮像部100は揺れていないと判断されたので、現在のフィールド揺れ量を変えず、画像取得範囲を制御する振れ補正制御部104は現状の画像抽出位置を維持し、画像抽出方式である電子補正式手ぶれ補正装置の制御目標を変えないようにする。
In step S402, since it is determined that the
ステップS401では、パンニング判断部103が、振れ検出部102から入力されたジャイロ信号の信号変動を所定範囲と比較し、信号変動が所定範囲内に収まっているか否か、つまり撮像部100が一定速度で振られている状態(パンニングやチルティングの場合)か、または撮像部100が不規則に揺れている状態(手ぶれ状態)かを判断する。信号変動が所定範囲内に収まっていなければステップS414へ処理を移す。信号変動が所定範囲内に収まっていればステップS403へ処理を移す。
In step S401, the panning determination unit 103 compares the signal variation of the gyro signal input from the
ステップS403では、パンニング判断部103が、撮像部100から入力された画像の動きベクトルを所定レベルと比較し、動きベクトルが所定レベルより大きいか否かを判断する。動きベクトルが所定レベル以下であれば、すなわち、被写体を追尾撮影していて画面に対して被写体位置があまり変わらず、動きベクトルが小さい場合には、ステップS414へ処理を移す。動きベクトルが所定レベルより大きいならばステップS404へ処理を移す。
In step S403, the panning determination unit 103 compares the motion vector of the image input from the
ステップS404では、フィールド揺れ量算出部105が、現在のタイミングがBフィールド(後半フィールド)の先頭であるか否かを判断する。Bフィールド先頭でない場合ステップS405へ処理を移し、Bフィールド先頭であった場合ステップS406へ処理を移す。
In step S404, the field fluctuation
ステップS406では、フィールド揺れ量算出部105が焦点検出部101からズームレンズ位置情報を取得して、ステップS407へ処理を移す。
In step S406, the field fluctuation
ステップS407では、フィールド揺れ量算出部105が焦点検出部101からフォーカスレンズ位置情報を取得して、ステップS408へ処理を移す。
In step S407, the field fluctuation
ステップS408では、フィールド揺れ量算出部105が、ズームレンズ位置情報とフォーカスレンズ位置情報とから被写体焦点情報を算出して、ステップS409へ処理を移す。
In step S408, the field shake
ステップS409では、フィールド揺れ量算出部105が、振れ検出部102から得たジャイロ信号を基にパンニング速度を算出して、ステップS410へ処理を移す。
In step S409, the field shake
ステップS410では、フィールド揺れ量算出部105が、被写体焦点情報とパンニング速度とからフィールドぶれ画像抽出補正値を算出して、ステップS411へ処理を移す。このフィールドぶれ画像抽出補正値は、フィールド間の画像ぶれを補正するために行われる画像抽出位置移動の移動量を示す。なお、レンズの画角仕様と撮像素子のサイズによって、パンニング速度を1フィールド当たりの画像抽出位置変化量に換算することができる。これを、図7を参照して説明する。
In step S410, the field shake
図7は、被写体とレンズと撮像素子との相互位置関係を示す図であり、レンズの画角とパンニング速度と画像抽出範囲との関係を説明するための図である。 FIG. 7 is a diagram illustrating a mutual positional relationship among a subject, a lens, and an image sensor, and is a diagram for explaining a relationship among a field angle of the lens, a panning speed, and an image extraction range.
すなわち、電子補正式手ぶれ補正装置では、手ぶれ補正を、撮影素子上の画像抽出位置を移動することによって行なうので、図7に示すように、レンズ位置PLに対して被写体位置がPO、撮像素子の位置がP1であり、被写体距離がDであるとする。広範囲抽出撮影では、画角がWAであり、撮像素子サイズSに対して撮像素子抽出範囲がAWになる。広範囲抽出撮影において、パンニング速度を1フィールドの画像抽出位置変化量に換算して、位置補正量がΔL1であった場合、画角はWAからWBに補正される。但しWA=WBである。なお電子ズーム率が大きくなるほど画角が狭くなる。 That is, in the electronic correction image stabilization apparatus, a camera shake correction, since carried out by moving the image extracting position on the imaging element, as shown in FIG. 7, the object position P O to the lens position P L, imaging Assume that the element position is P 1 and the subject distance is D. In wide-range extraction shooting, the angle of view is W A , and the imaging element extraction range is A W with respect to the imaging element size S. In extensive extraction shooting, the panning speed in terms of the image extraction position change amount of one field, when the position correction amount was .DELTA.L1, the angle of view is corrected from W A to W B. However, W A = W B. Note that the angle of view becomes narrower as the electronic zoom ratio increases.
一方、狭範囲抽出撮影では、画角がTAであり、撮像素子抽出範囲がATになる。撮像素子サイズSは広範囲抽出撮影でも狭範囲抽出撮影でも同一なので、電子ズーム率が大きく望遠側になるほど抽出範囲Aが狭くなる。そこで狭範囲抽出撮影において、パンニング速度を1フィールドの画像抽出位置変化量に換算して、位置補正量がΔL2であった場合、位置補正量ΔL2は下記式(2)に基づき算出できる。 On the other hand, in narrow range extraction shooting, the angle of view is T A and the image sensor extraction range is AT . Since the imaging element size S is the same for both wide-range extraction photography and narrow-range extraction photography, the extraction range A becomes narrower as the electronic zoom ratio becomes larger and the telephoto side becomes larger. Therefore, in the narrow range extraction photographing, when the panning speed is converted into the image extraction position change amount of one field and the position correction amount is ΔL 2 , the position correction amount ΔL 2 can be calculated based on the following equation (2).
ΔL2=ΔL1×(AT/Aw) ・・・(2)
狭範囲抽出撮影では、画角はTAからTBに補正される。但しTA=TBである。
ΔL 2 = ΔL 1 × (A T / A w ) (2)
In narrow range extraction photography, the angle of view is corrected from T A to T B. However, T A = T B.
図6に戻ってステップS411では、フィールド揺れ量算出部105が、振れ検出部102から出力されたジャイロ信号を基に、フィールドぶれ画像抽出補正を行なわないインタレース表示向けの手ぶれ画像抽出範囲を算出して、ステップS412へ処理を移す。
Returning to FIG. 6, in step S <b> 411, the field shake
ステップS412では、フィールド揺れ量算出部105が、インタレース表示向けの手ぶれ画像抽出範囲に、ステップS410で算出されたフィールドぶれ画像抽出補正値を加算して、ステップS413へ処理を移す。
In step S412, the field shake
ステップS405では、フィールド揺れ量算出部105が、現在のタイミングがAフィールド(前半フィールド)の先頭であるか否かを判断する。Aフィールド先頭でない場合、振れ補正制御処理を終了し、Aフィールド先頭であった場合ステップS414へ処理を移す。
In step S405, the field fluctuation
ステップS414では、フィールド揺れ量算出部105が、振れ検出部102から出力されたジャイロ信号を基に、フィールドぶれ画像抽出補正を行なわない手ぶれ画像抽出範囲を算出して、ステップS413へ処理を移す。
In step S414, the field shake
ステップS413では、振れ補正制御部104が、ステップS412で算出された加算値またはステップS414で算出された手ぶれ画像抽出範囲を用いて、撮像部100に含まれる画像抽出方式である電子補正式手ぶれ補正装置の画像抽出目標値を更新する。撮像部100の電子補正式手ぶれ補正装置は、更新された画像抽出目標値における画像を抽出する。
In step S413, the shake
以上のように、撮像部100に含まれる電子補正式手ぶれ補正装置に対して振れ補正制御を行なうことにより、次のような効果を得られる。
As described above, by performing shake correction control on the electronic correction type image stabilization device included in the
図8(A)は、1つの画面に対する2つのフィールド(A,B)における従来のヨー(Y)方向及びピッチ(P)方向の画像抽出位置を示す図、図8(B)は、2つのフィールドにおける従来の画像抽出範囲を示す図、図8(C)は、2つのフィールドによる従来のフィールドぶれを示す図である。また、図9(A)は、2つのフィールド(A,B)における本実施の形態でのヨー(Y)方向及びピッチ(P)方向の画像抽出位置を示す図、図9(B)は、2つのフィールドにおける本実施の形態での画像抽出範囲を示す図、図9(C)は、2つのフィールドによる本実施の形態でのフィールドぶれを示す図である。 FIG. 8A shows a conventional image extraction position in the yaw (Y) direction and pitch (P) direction in two fields (A, B) for one screen, and FIG. FIG. 8C is a diagram showing a conventional image extraction range in a field, and FIG. 8C is a diagram showing conventional field blur due to two fields. FIG. 9A is a diagram showing image extraction positions in the yaw (Y) direction and pitch (P) direction in the present embodiment in two fields (A, B), and FIG. The figure which shows the image extraction range in this Embodiment in two fields, FIG.9 (C) is a figure which shows the field blurring in this Embodiment by two fields.
従来のインタレース表示向け手ぶれ補正では、図8(A),(B)に示すように、パンニング撮影した時に、ヨー(Y)方向及びピッチ(P)方向の画像抽出位置が一定であって、したがって、図8(C)に示すように、AフィールドとBフィールドとの間にフィールドぶれが発生する。これに対して本実施の形態では、図9(A)に示すように、Bフィールドのずれ量を焦点情報、パンニング速度から算出して、図9(B)に示すように、インタレース表示向けの手ぶれ補正値に加算して画像抽出位置を補正する。これにより、図9(C)に示すように、AフィールドとBフィールドとの間でフィールドぶれを打ち消すことができ、このように動きのある被写体映像をプログレッシブ再生しても、被写体部分でフィールド間のギザギザが発生しないという効果がある。 In the conventional camera shake correction for interlaced display, as shown in FIGS. 8A and 8B, when panning shooting is performed, the image extraction positions in the yaw (Y) direction and the pitch (P) direction are constant, and Therefore, as shown in FIG. 8C, field blur occurs between the A field and the B field. On the other hand, in the present embodiment, as shown in FIG. 9A, the deviation amount of the B field is calculated from the focus information and the panning speed, and as shown in FIG. The image extraction position is corrected by adding to the camera shake correction value. As a result, as shown in FIG. 9C, field blur can be canceled between the A field and the B field, and even if the subject image with such movement is progressively reproduced, There is an effect that no jaggedness is generated.
〔第3の実施の形態〕
次に、本発明の第3の実施の形態を説明する。
[Third Embodiment]
Next, a third embodiment of the present invention will be described.
第3の実施の形態の構成は、基本的に第1の実施の形態の構成と同じであるので、第3の実施の形態の説明においては、第1の実施の形態の構成と同一部分には同一の参照符号を付して、第1の実施の形態の説明を流用し、異なる部分だけを説明する。 Since the configuration of the third embodiment is basically the same as the configuration of the first embodiment, in the description of the third embodiment, the same parts as the configuration of the first embodiment are used. Are denoted by the same reference numerals, and the description of the first embodiment is used, and only different portions will be described.
図10は、第3の実施の形態における画像記録再生装置で実行される、撮像部100に含まれるズームレンズに対する画角制御処理の手順を示すフローチャートである。
FIG. 10 is a flowchart illustrating the procedure of the angle-of-view control process for the zoom lens included in the
ステップS600において、ズーミング判断部107が、ズームレンズを駆動するためのズームキー(不図示)からキー入力があったか否かを判断する。キー入力が無ければステップS602へ処理を移す。キー入力があった場合はステップS601へ処理を移す。
In step S600, the zooming
ステップS602では、キー入力が無いので、ズームレンズ位置を固定のまま、画角制御部106が、現在のズームレンズ駆動目標を維持して、現在の画角を維持する。
In step S602, since there is no key input, the angle-of-
ステップS601では、ズーミング判断部107が、撮像部100から入力された画像の動きベクトルを所定レベルと比較し、該動きベクトルが所定レベルより大きいか否かを判断する。動きベクトルが所定レベル以下であるならば、すなわち、遠のく被写体をズームイン撮影している場合や、近づく被写体をズームアウト撮影している場合であって、画面に対して被写体倍率があまり変化しない場合には、ステップS604へ処理を移す。一方、動きベクトルが所定レベルより大きいならば、ステップS603へ処理を移す。
In step S601, the zooming
ステップS603では、フィールド変倍量算出部108が、現在のタイミングがAフィールド(前半フィールド)の先頭であるか否かを判断する。Aフィールド先頭でない場合はステップS606へ処理を移す。Aフィールド先頭である場合はステップS605へ処理を移す。
In step S603, the field scaling
ステップS604では、従来のズーム撮影時と同様に、画角制御部106が、図11(A)に示すように、毎フィールド先頭において、ズーム速度に応じてズーム倍率目標値を切り替えて、画角制御処理を終える。
In step S604, similarly to the conventional zoom shooting, the view
ステップS605では、フィールド変倍量算出部108が、画角制御部106からズーム速度を取得して、前回Aフィールドからの1フレーム経過分に相当するAフィールドの目標倍率に、ズームレンズ駆動目標を切替えて、画角制御処理を終える。
In step S605, the field scaling
ステップS606では、フィールド変倍量算出部108が、現在のタイミングがBフィールド(後半フィールド)の先頭であるか否かを判断する。Bフィールド先頭でない場合は画角制御処理を終える。Bフィールド先頭である場合はステップS607へ処理を移す。
In step S606, the field scaling
ステップS607では、フィールド変倍量算出部108がズームレンズ位置を固定して、画角制御部106が、現在のズームレンズ駆動目標を維持して、現在の画角を維持し、画角制御処理を終える。
In step S607, the field scaling
以上のように、撮像部100に含まれるズームレンズに対して画角制御を行なうことにより、次のような効果を得られる。
As described above, by performing the angle of view control on the zoom lens included in the
図11(A)は、1つの画面に対する2つのフィールド(A,B)における従来のズーム倍率目標値を示す図、図11(B)は、2つのフィールドにおける従来の画像ずれを示す図である。また、図12(A)は、2つのフィールド(A,B)における本実施の形態でのズーム倍率目標値を示す図、図12(B)は、2つのフィールドにおける本実施の形態での画像ずれを示す図である。 11A shows a conventional zoom magnification target value in two fields (A, B) for one screen, and FIG. 11B shows a conventional image shift in two fields. . FIG. 12A shows the zoom magnification target value in the present embodiment in two fields (A, B), and FIG. 12B shows the image in the present embodiment in two fields. It is a figure which shows deviation | shift.
従来のインタレース表示向けズーム駆動では、図11(A)に示すように、ズーミング撮影した時に、ズーム倍率目標値が設定され、したがって、図11(B)に示すように、AフィールドとBフィールドとの間に画像ずれが発生する。これに対して本実施の形態では、図12(A)に示すように、Bフィールドのズーム倍率目標値をAフィールドに合わせるように補正する。これにより、図12(B)に示すように、AフィールドとBフィールドとの間での画像ずれが解消でき、このようにズーミング中の被写体映像をプログレッシブ再生しても、被写体部分でフィールド間の画像ずれが発生しないという効果がある。 In the conventional interlaced display zoom drive, as shown in FIG. 11A, the zoom magnification target value is set when zooming is performed. Therefore, as shown in FIG. 11B, the A field and the B field are set. An image shift occurs between On the other hand, in this embodiment, as shown in FIG. 12A, the zoom magnification target value of the B field is corrected to match the A field. As a result, as shown in FIG. 12B, the image shift between the A field and the B field can be eliminated, and even if the subject image being zoomed is progressively reproduced in this manner, There is an effect that image shift does not occur.
なお、本実施の形態には、図11及び図12において、広角側から望遠側方向のズームインを例に挙げているが、望遠側から広角側方向のズームアウトに対しても、同様に画角制御処理を実行することができる。 In this embodiment, zooming in from the wide-angle side to the telephoto side direction is taken as an example in FIGS. 11 and 12, but the angle of view is similarly applied to zoom-out from the telephoto side to the wide-angle side direction. Control processing can be executed.
〔第4の実施の形態〕
次に、本発明の第4の実施の形態を説明する。
[Fourth Embodiment]
Next, a fourth embodiment of the present invention will be described.
第4の実施の形態の構成は、基本的に第1の実施の形態の構成と同じであるので、第4の実施の形態の説明においては、第1の実施の形態の構成と同一部分には同一の参照符号を付して、第1の実施の形態の説明を流用し、異なる部分だけを説明する。 Since the configuration of the fourth embodiment is basically the same as the configuration of the first embodiment, in the description of the fourth embodiment, the same parts as the configuration of the first embodiment are used. Are denoted by the same reference numerals, and the description of the first embodiment is used, and only different portions will be described.
図13は、第4の実施の形態における画像記録再生装置で実行される、撮像部100に含まれる撮像素子に対する画像切出面積の制御処理の手順を示すフローチャートである。なお、第4の実施の形態では、撮像部100に光学式のズームレンズが備えられる他に、電子ズーム機能も備えられるものとする。
FIG. 13 is a flowchart illustrating a procedure of an image cut-out area control process performed on the image sensor included in the
ステップS800において、ズーミング判断部107が、ズームレンズを駆動するためのズームキー(不図示)からキー入力があったか否かを判断する。キー入力が無ければステップS802へ処理を移す。キー入力があった場合はステップS801へ処理を移す。
In step S800, the zooming
ステップS802では、キー入力が無いので、ズーム倍率を固定のまま、画角制御部106が、現在の画像切出面積の制御目標を維持して、現在の画角を維持する。
In step S802, since there is no key input, the angle-of-
ステップS801では、ズーミング判断部107が、撮像部100から入力された画像の動きベクトルを所定レベルと比較し、該動きベクトルが所定レベルより大きいか否かを判断する。動きベクトルが所定レベル以下であるならば、すなわち、遠のく被写体をズームイン撮影している場合や、近づく被写体をズームアウト撮影している場合であって、画面に対して被写体倍率があまり変化しない場合には、ステップS804へ処理を移す。一方、動きベクトルが所定レベルより大きいならば、ステップS803へ処理を移す。
In step S801, the zooming
ステップS803では、フィールド変倍量算出部108が、現在のタイミングがAフィールド(前半フィールド)の先頭であるか否かを判断する。Aフィールド先頭でない場合はステップS806へ処理を移す。Aフィールド先頭である場合はステップS805へ処理を移す。
In step S803, the field scaling
ステップS804では、従来のズーム撮影時と同様に、画角制御部106が、図14(A)に示すように、毎フィールド先頭において、ズーム速度に応じて画像切出し面積目標値を切り替えて、画像切出面積の制御処理を終える。
In step S804, as in the conventional zoom shooting, the angle-of-
ステップS805では、フィールド変倍量算出部108が、画角制御部106からズーム速度を取得して、前回Aフィールドからの1フレーム経過分に相当するAフィールドの画像切出面積に、目標値を切替えて、画像切出面積の制御処理を終える。
In step S805, the field scaling
ステップS806では、フィールド変倍量算出部108が、現在のタイミングがBフィールド(後半フィールド)の先頭であるか否かを判断する。Bフィールド先頭でない場合は画像切出面積の制御処理を終える。Bフィールド先頭である場合はステップS807へ処理を移す。
In step S806, the field scaling
ステップS807では、フィールド変倍量算出部108がズーム倍率を固定して、画角制御部106が、現在の画像切出面積を維持するようにするズームレンズ制御目標に切り替えて、画像切出面積の制御処理を終える。
In step S807, the field scaling
以上のように、撮像部100に含まれる撮像素子に対する画像切出面積制御を行なうことにより、次のような効果を得られる。
As described above, the following effects can be obtained by performing the image cut-out area control for the image pickup device included in the
図14(A)は、1つの画面に対する2つのフィールド(A,B)におけるズームイン方向での従来のズーム倍率目標値を示す図、図14(B)は、2つのフィールドにおける従来の画像切出面積を示す図、図14(C)は、2つのフィールドにおける従来の画像ずれを示す図、図14(D)は、2つのフィールドにおけるズームアウト方向での従来のズーム倍率目標値を示す図である。また、図15(A)は、2つのフィールド(A,B)におけるズームイン方向での本実施の形態でのズーム倍率目標値を示す図、図15(B)は、2つのフィールドにおける本実施の形態での画像画像切出面積を示す図、図15(C)は、2つのフィールドにおける本実施の形態での画像ずれを示す図、図15(D)は、2つのフィールドにおけるズームアウト方向での本実施の形態でのズーム倍率目標値を示す図である。 FIG. 14A shows a conventional zoom magnification target value in the zoom-in direction in two fields (A, B) for one screen, and FIG. 14B shows conventional image cropping in two fields. FIG. 14C is a diagram showing an area, FIG. 14C is a diagram showing a conventional image shift in two fields, and FIG. 14D is a diagram showing a conventional zoom magnification target value in the zoom-out direction in two fields. is there. FIG. 15A shows the zoom magnification target value in the present embodiment in the zoom-in direction in two fields (A, B), and FIG. 15B shows the present embodiment in two fields. FIG. 15C is a diagram showing an image image cut-out area in the form, FIG. 15C is a diagram showing image shift in the present embodiment in two fields, and FIG. 15D is a zoom-out direction in two fields. It is a figure which shows the zoom magnification target value in this Embodiment.
従来のインタレース表示向けズーム駆動では、図14(A)に示すように、ズームイン方向にズーミング撮影した時に、ズーム倍率目標値が設定され、したがって、図14(B)に示すように、フィールドごとに順次、画像切出面積が変化してズーム率が変化するので、図14(C)に示すように、AフィールドとBフィールドとの間に画像ずれが発生する。なお、図14(D)に示すように、ズームアウト方向にズーミング撮影した時でも、同じ現象が発生する。 In the conventional interlaced display zoom drive, as shown in FIG. 14A, when zooming is performed in the zoom-in direction, the zoom magnification target value is set. Therefore, as shown in FIG. Since the image cut-out area sequentially changes and the zoom ratio changes, an image shift occurs between the A field and the B field as shown in FIG. Note that, as shown in FIG. 14D, the same phenomenon occurs even when zooming shooting is performed in the zoom-out direction.
これに対して本実施の形態では、図15(A)に示すように、Bフィールドのズーム倍率目標値をAフィールドに合わせるように補正する。すなわち、図15(B)に示すように、Aフィールドでの画像切出面積とBフィールドでの画像切出面積とを同じなるようにする。これにより、図15(C)に示すように、AフィールドとBフィールドとの間での画像ずれが解消でき、このようにズーミング中の被写体映像をプログレッシブ再生しても、被写体部分でフィールド間の画像ずれが発生しないという効果がある。 On the other hand, in this embodiment, as shown in FIG. 15A, the zoom magnification target value in the B field is corrected so as to match the A field. That is, as shown in FIG. 15B, the image cut-out area in the A field and the image cut-out area in the B field are made the same. As a result, as shown in FIG. 15C, the image shift between the A field and the B field can be eliminated, and even if the subject image being zoomed is progressively reproduced as described above, There is an effect that image shift does not occur.
なお、図15(D)に示すように、ズームアウト方向にズーミング撮影した時でも、Bフィールドのズーム倍率目標値をAフィールドに合わせるように補正することによって、同じように、AフィールドとBフィールドとの間での画像ずれを解消できる。 As shown in FIG. 15D, even when zooming is performed in the zoom-out direction, the A field and the B field are similarly corrected by correcting the zoom field target value of the B field to match the A field. Can be eliminated.
〔第5の実施の形態〕
次に、本発明の第5の実施の形態を説明する。
[Fifth Embodiment]
Next, a fifth embodiment of the present invention will be described.
第5の実施の形態の構成は、基本的に第1の実施の形態の構成と同じであるので、第5の実施の形態の説明においては、第1の実施の形態の構成と同一部分には同一の参照符号を付して、第1の実施の形態の説明を流用し、異なる部分だけを説明する。 Since the configuration of the fifth embodiment is basically the same as the configuration of the first embodiment, the description of the fifth embodiment is the same as the configuration of the first embodiment. Are denoted by the same reference numerals, and the description of the first embodiment is used, and only different portions will be described.
第5の実施の形態では、パンニング撮影した画像を記録するときに、Aフィールド(前半フィールド)に対するBフィールド(後半フィールド)のずれをメタデータとして記録し、再生時にインタレース表示向けの画像抽出範囲を位置補正するようにして、AフィールドとBフィールドとのフィールドぶれを打ち消すようにしている。 In the fifth embodiment, when a panned image is recorded, a deviation of the B field (second half field) with respect to the A field (first half field) is recorded as metadata, and an image extraction range for interlaced display during reproduction is recorded. Is corrected so that field blur between the A field and the B field is canceled out.
図16は、第5の実施の形態における画像記録再生装置で実行される、画像情報とともにフィールド揺れ量を記録する記録処理の手順を示すフローチャートである。 FIG. 16 is a flowchart showing a recording process procedure for recording the field fluctuation amount together with the image information, which is executed by the image recording / reproducing apparatus according to the fifth embodiment.
ステップS900にて、パンニング判断部103に振れ検出部102から、撮像部100の揺れを示すジャイロ信号が入力されているか否か、つまり撮像部100が揺れているか否かを、パンニング判断部103が判断する。ジャイロ信号の入力が無ければ記録処理を終える。ジャイロ信号の入力がある場合はステップS901へ処理を移す。
In step S900, the panning determination unit 103 determines whether or not the gyro signal indicating the shaking of the
ステップS901では、パンニング判断部103が、振れ検出部102から入力されたジャイロ信号の信号変動を所定範囲と比較し、信号変動が所定範囲内に収まっているか否か、つまり撮像部100が一定速度で振られている状態(パンニングやチルティングの場合)か、または撮像部100が不規則に揺れている状態かを判断する。信号変動が所定範囲内に収まっていなければ記録処理を終える。信号変動が所定範囲内に収まっていればステップS902へ処理を移す。
In step S901, the panning determination unit 103 compares the signal variation of the gyro signal input from the
ステップS902では、パンニング判断部103が、撮像部100から入力された画像の動きベクトルを所定レベルと比較し、動きベクトルが所定レベルより大きいか否かを判断する。動きベクトルが所定レベル以下であれば、すなわち、被写体を追尾撮影していて画面に対して被写体位置があまり変わらず、動きベクトルが小さい場合には、記録処理を終える。動きベクトルが所定レベルより大きいならばステップS903へ処理を移す。
In step S902, the panning determination unit 103 compares the motion vector of the image input from the
ステップS903では、フィールド揺れ量算出部105が、現在のタイミングがBフィールド(後半フィールド)の先頭であるか否かを判断する。Bフィールド先頭でない場合ステップS905へ処理を移し、Bフィールド先頭であった場合ステップS904へ処理を移す。
In step S903, the field fluctuation
ステップS904では、フィールド揺れ量算出部105が焦点検出部101からズームレンズ位置情報を取得して、ステップS906へ処理を移す。
In step S904, the field fluctuation
ステップS906では、フィールド揺れ量算出部105が焦点検出部101からフォーカスレンズ位置情報を取得して、ステップS907へ処理を移す。
In step S906, the field fluctuation
ステップS907では、フィールド揺れ量算出部105が、ズームレンズ位置情報とフォーカスレンズ位置情報とから被写体焦点情報を算出して、ステップS908へ処理を移す。
In step S907, the field fluctuation
ステップS908では、フィールド揺れ量算出部105が、振れ検出部102から得たジャイロ信号を基にパンニング速度を算出して、ステップS909へ処理を移す。
In step S908, the field shake
ステップS909では、フィールド揺れ量算出部105が、被写体焦点情報とパンニング速度とからフィールドぶれ画像抽出補正値を算出し、補正メタデータ付加取得部109がフィールドぶれ画像抽出補正メタデータを作成して、ステップS910へ処理を移す。このフィールドぶれ画像抽出補正値は、再生時に画像抽出位置を動かすことによってフィールド間の画像ぶれを補正するための画像抽出位置移動量を示す。
In step S909, the field fluctuation
ステップS910では、フィールド揺れ量算出部105が、振れ検出部102から得たジャイロ信号を基に、フィールドぶれ画像抽出補正を行なわないインタレース表示向けの手ぶれ画像抽出範囲を算出し、補正メタデータ付加取得部109が、手ぶれ画像抽出範囲メタデータを作成して、ステップS911へ処理を移す。
In step S910, based on the gyro signal obtained from the
ステップS911では、補正メタデータ付加取得部109が、フィールドぶれ画像抽出補正メタデータを更新して、ステップS912へ処理を移す。
In step S911, the correction metadata
ステップS905では、フィールド揺れ量算出部105が、現在のタイミングがAフィールド(前半フィールド)の先頭であるか否かを判断する。Aフィールド先頭でない場合、ステップS914へ処理を移し、Aフィールド先頭であった場合ステップS913へ処理を移す。
In step S905, the field fluctuation
ステップS913では、フィールド揺れ量算出部105が、振れ検出部102から出力されたジャイロ信号を基に、フィールドぶれ画像抽出補正を行なわないインタレース表示向けの手ぶれ画像抽出範囲を算出し、補正メタデータ付加取得部109が、手ぶれ画像抽出範囲メタデータを更新してステップS912へ処理を移す。
In step S913, the field shake
ステップS912では、補正メタデータ付加取得部109が、フィールドぶれ画像抽出補正を行なわないインタレース表示向けの手ぶれ画像抽出範囲メタデータを更新して、ステップS914へ処理を移す。
In step S912, the correction metadata
ステップS914では、記録再生部110が、画像情報とともに、手ぶれ画像抽出範囲メタデータ及びフィールドぶれ画像抽出補正メタデータを記録する。
In step S914, the recording / reproducing
図17は、第5の実施の形態における画像記録再生装置で実行される、画像情報とともにフィールド揺れ量を再生してフィールドぶれを補正する再生補正処理の手順を示すフローチャートである。 FIG. 17 is a flowchart showing the procedure of a reproduction correction process that is performed by the image recording / reproducing apparatus according to the fifth embodiment and reproduces the field fluctuation amount together with the image information to correct the field blur.
ステップS1000では、非インタレース補正部111が、記録再生部110の出力として非インタレース出力が選択されているか否かを判断する。インタレース出力が選択されていれば再生補正処理を終える。非インタレース出力が選択されている場合、ステップS1001へ処理を移す。
In step S1000, the non-interlace correction unit 111 determines whether non-interlace output is selected as the output of the recording /
ステップS1001では、非インタレース補正部111が、再生画像の現在のタイミングが、Bフィールドの先頭であるか否かを判断する。Bフィールド先頭で無い場合ステップS1003へ処理を移す。Bフィールド先頭である場合ステップS1002へ処理を移す。 In step S1001, the non-interlace correction unit 111 determines whether or not the current timing of the reproduced image is the head of the B field. If it is not at the head of the B field, the process proceeds to step S1003. If it is at the head of the B field, the process proceeds to step S1002.
ステップS1002では、補正メタデータ付加取得部109が、記録再生部110から手ぶれ画像抽出範囲メタデータを取得して、ステップS1004へ処理を移す。
In step S1002, the correction metadata
ステップS1004では、補正メタデータ付加取得部109が、手ぶれ画像抽出範囲メタデータにデータが書かれているか否かを判断する。書かれていない場合、再生補正処理を終える。書かれている場合ステップS1005へ処理を移す。
In step S1004, the corrected metadata
ステップS1005では、補正メタデータ付加取得部109が、記録再生部110からフィールドぶれ画像抽出補正メタデータを取得して、ステップS1006へ処理を移す。
In step S1005, the correction metadata
ステップS1006では、補正メタデータ付加取得部109が、フィールドぶれ画像抽出補正メタデータにデータが書かれているか否かを判断する。書かれていない場合、ステップS1008へ処理を移す。書かれている場合ステップS1007へ処理を移す。
In step S1006, the correction metadata
ステップS1007では、非インタレース補正部111が、インタレース表示向けの手ぶれ画像抽出範囲にフィールドぶれ画像抽出補正値を加算して得られた範囲を画像抽出範囲に設定して、ステップS1009へ処理を移す。 In step S1007, the non-interlace correction unit 111 sets the range obtained by adding the field blur image extraction correction value to the camera shake image extraction range for interlaced display as the image extraction range, and the process proceeds to step S1009. Transfer.
ステップS1008では、非インタレース補正部111が、インタレース表示向けの手ぶれ画像抽出範囲を画像抽出範囲に設定して、ステップS1009へ処理を移す。 In step S1008, the non-interlace correction unit 111 sets the camera shake image extraction range for interlaced display as the image extraction range, and moves the process to step S1009.
ステップS1003では、非インタレース補正部111が、再生画像の現在のタイミングがAフィールドの先頭であるか否かを判断する。Aフィールド先頭で無い場合、再生補正処理を終える。Aフィールド先頭であった場合ステップS1010へ処理を移す。 In step S1003, the non-interlace correction unit 111 determines whether or not the current timing of the reproduced image is the head of the A field. If it is not at the head of the A field, the reproduction correction process is terminated. If it is at the top of the A field, the process proceeds to step S1010.
ステップS1010では、補正メタデータ付加取得部109が、記録再生部110から手ぶれ画像抽出範囲メタデータを取得して、ステップS1011へ処理を移す。
In step S1010, the correction metadata
ステップS1011では、補正メタデータ付加取得部109が、手ぶれ画像抽出範囲メタデータにデータが書かれているか否かを判断する。書かれていない場合、再生補正処理を終える。書かれている場合ステップS1012へ処理を移す。
In step S1011, the corrected metadata
ステップS1012では、非インタレース補正部111が、インタレース表示向けの手ぶれ画像抽出範囲を画像抽出範囲に設定して、ステップS1009へ処理を移す。 In step S1012, the non-interlace correction unit 111 sets the camera shake image extraction range for interlaced display as the image extraction range, and the process proceeds to step S1009.
ステップS1009では、非インタレース補正部111が、再生すべき画像抽出範囲を、ステップS1007,S1008,S1012のいずれかで設定された画像抽出範囲に更新する。 In step S1009, the non-interlace correction unit 111 updates the image extraction range to be reproduced to the image extraction range set in any of steps S1007, S1008, and S1012.
以上説明した第5の実施の形態における記録処理及び再生補正処理の実行によって、下記の効果が得られる。なお、以下の説明では、第2の実施の形態で参照した図8及び図9を流用する。 The following effects can be obtained by executing the recording process and the reproduction correction process in the fifth embodiment described above. In the following description, FIGS. 8 and 9 referred to in the second embodiment are used.
従来のインタレース表示向け画像抽出補正では、図8(A),(B)に示すように、パンニング撮影した画像を再生する時に、画像抽出位置が一定であって、したがって、図8(C)に示すように、AフィールドとBフィールドとの間にフィールドぶれが発生する。これに対して本実施の形態では、図9(A)に示すようなBフィールドのずれ量を、記録時にメタデータとして記録し、再生時に、図9(B)に示すように、インタレース表示向けの画像抽出範囲を更に位置補正する。これにより、図9(C)に示すように、非インタレース表示器112において、AフィールドとBフィールドとの間でフィールドぶれを打ち消すことができ、このように動きのある被写体映像をインタレース記録して、再生時にインタレース再生する画像記録再生装置で、プログレッシブ再生を選択しても、被写体部分でフィールド間のギザギザが発生しないという効果がある。
In the conventional image extraction correction for interlaced display, as shown in FIGS. 8A and 8B, the image extraction position is constant when the panned image is reproduced, and therefore FIG. As shown in FIG. 4, field blur occurs between the A field and the B field. On the other hand, in the present embodiment, the deviation amount of the B field as shown in FIG. 9A is recorded as metadata at the time of recording and is displayed as interlaced as shown in FIG. 9B at the time of reproduction. The position of the image extraction range is further corrected. As a result, as shown in FIG. 9 (C), the
〔第6の実施の形態〕
次に、本発明の第6の実施の形態を説明する。
[Sixth Embodiment]
Next, a sixth embodiment of the present invention will be described.
第6の実施の形態の構成は、基本的に第1の実施の形態の構成と同じであるので、第6の実施の形態の説明においては、第1の実施の形態の構成と同一部分には同一の参照符号を付して、第1の実施の形態の説明を流用し、異なる部分だけを説明する。 Since the configuration of the sixth embodiment is basically the same as the configuration of the first embodiment, in the description of the sixth embodiment, the same parts as the configuration of the first embodiment are used. Are denoted by the same reference numerals, and the description of the first embodiment is used, and only different portions will be described.
第6の実施の形態では、ズーミング撮影した画像を記録するときに、フィールド変倍量をメタデータとして記録し、再生時にフィールド変倍量を用いてフィールドぶれを補正するようにしている。 In the sixth embodiment, when recording a zoomed image, the field magnification is recorded as metadata, and field blur is corrected using the field magnification during reproduction.
図18は、第6の実施の形態における画像記録再生装置で実行される、画像情報とともにフィールド変倍量を記録する記録処理の手順を示すフローチャートである。 FIG. 18 is a flowchart showing a procedure of a recording process for recording the field scaling amount together with the image information, which is executed by the image recording / reproducing apparatus in the sixth embodiment.
ステップS1100では、ズーミング判断部107が、ズームキー(不図示)からキー入力があったか否かを判断する。キー入力が無ければ記録処理を終える。キー入力があった場合はステップS1101へ処理を移す。
In step S1100, the zooming
ステップS1101では、フィールド変倍量算出部108が、現在のタイミングがAフィールド(前半フィールド)の先頭であるか否かを判断する。Aフィールド先頭で無い場合ステップS1105へ処理を移す。Aフィールド先頭であった場合ステップS1102へ処理を移す。
In step S1101, the field scaling
ステップS1102では、フィールド変倍量算出部108が画角制御部106からズーム倍率を取得して、補正メタデータ付加取得部109がAフィールドのズーム倍率メタデータを作成して、ステップS1103に処理を移す。
In step S1102, the field scaling
ステップS1103では、フィールド変倍量算出部108が画角制御部106からズーム倍率を取得して、補正メタデータ付加取得部109はBフィールドのズーム倍率メタデータを作成して、ステップS1104に処理を移す。
In step S1103, the field scaling
ステップS1104では、補正メタデータ付加取得部109がズーム倍率メタデータを更新して、ステップS1105へ処理を移す。
In step S1104, the correction metadata
ステップS1105では、記録再生部110が、画像情報とともにAフィールドズーム倍率メタデータ及びBフィールドズーム倍率メタデータを記録する。
In step S1105, the recording / reproducing
図19は、第6の実施の形態における画像記録再生装置で実行される、画像情報とともにフィールド変倍量を再生してフィールドぶれを補正する再生補正処理の手順を示すフローチャートである。 FIG. 19 is a flowchart showing the procedure of a reproduction correction process that is performed by the image recording / reproducing apparatus according to the sixth embodiment to reproduce the field scaling amount together with the image information to correct the field blur.
ステップS1200では、非インタレース補正部111が、記録再生部110の出力として非インタレース出力が選択されているか否かを判断する。インタレース出力が選択されていれば再生補正処理を終える。非インタレース出力が選択されている場合ステップS1201へ処理を移す。
In step S1200, the non-interlace correction unit 111 determines whether a non-interlace output is selected as the output of the recording /
ステップS1201では、非インタレース補正部111が、再生画像の現在のタイミングがAフィールドの先頭であるか否かを判断する。Aフィールド先頭で無い場合ステップS1205へ処理を移す。Aフィールド先頭であった場合ステップS1202へ処理を移す。 In step S1201, the non-interlace correction unit 111 determines whether or not the current timing of the reproduced image is the head of the A field. If it is not the head of the A field, the process proceeds to step S1205. If it is at the top of the A field, the process proceeds to step S1202.
ステップS1202では、補正メタデータ付加取得部109が、記録再生部110からAフィールドズーム倍率メタデータを取得して、ステップS1203へ処理を移す。
In step S1202, the correction metadata
ステップS1203では、補正メタデータ付加取得部109が、記録再生部110からBフィールドズーム倍率メタデータを取得して、ステップS1204へ処理を移す。
In step S1203, the correction metadata
ステップS1204では、補正メタデータ付加取得部109が、AフィールドとBフィールドとでズーム率が異なっているか否かを判断する。ズーム率が同じ場合、再生補正処理を終える。ズーム率が異なる場合ステップS1205へ処理を移す。
In step S1204, the corrected metadata
ステップS1205では、非インタレース補正部111が、ズームが広角側から望遠側へのズームインであるか、逆のズームアウトであるかを判断する。広角側から望遠側へのズームインである場合、ステップS1206へ処理を移し、そうでない場合はステップS1207へ処理を移す。 In step S1205, the non-interlace correction unit 111 determines whether the zoom is zoom-in from the wide-angle side to the telephoto side or the reverse zoom-out. If the zoom-in is from the wide-angle side to the telephoto side, the process proceeds to step S1206. If not, the process proceeds to step S1207.
ステップS1206では、非インタレース補正部111が、再生画像の現在のタイミングがAフィールドの先頭であるか否かを判断する。Aフィールド先頭で無い場合、ステップS1029へ処理を移す。フィールド先頭であった場合ステップS1208へ処理を移す。 In step S1206, the non-interlace correction unit 111 determines whether or not the current timing of the reproduced image is the head of the A field. If it is not at the head of the A field, the process proceeds to step S1029. If it is at the head of the field, the process proceeds to step S1208.
ステップS1208では、非インタレース補正部111が、Aフィールド画像のズーム倍率が後のBフィールド画像のズーム倍率と同じになるように画像抽出範囲を変更する。 In step S1208, the non-interlace correction unit 111 changes the image extraction range so that the zoom magnification of the A field image becomes the same as the zoom magnification of the subsequent B field image.
ステップS1209では、非インタレース補正部111が、再生画像の現在のタイミングがBフィールドの先頭であるか否かを判断する。Bフィールド先頭で無い場合、再生補正処理を終える。Bフィールド先頭であった場合ステップS1210へ処理を移す。 In step S1209, the non-interlace correction unit 111 determines whether or not the current timing of the reproduced image is the head of the B field. If it is not at the head of the B field, the reproduction correction process is terminated. If it is at the head of the B field, the process proceeds to step S1210.
ステップS1210では、非インタレース補正部111が、Bフィールド画像のズーム倍率で画像抽出範囲を固定する。 In step S1210, the non-interlace correction unit 111 fixes the image extraction range with the zoom magnification of the B field image.
ステップS1207では、非インタレース補正部111が、再生画像の現在のタイミングがAフィールドの先頭であるか否かを判断する。Aフィールド先頭で無い場合、ステップS1212へ処理を移す。Aフィールド先頭であった場合ステップS1211へ処理を移す。 In step S1207, the non-interlace correction unit 111 determines whether or not the current timing of the reproduced image is the head of the A field. If it is not the head of the A field, the process proceeds to step S1212. If it is at the top of the A field, the process proceeds to step S1211.
ステップS1211では、非インタレース補正部111が、Aフィールド画像のズーム倍率で画像抽出範囲を固定する。 In step S1211, the non-interlace correction unit 111 fixes the image extraction range at the zoom magnification of the A field image.
ステップS1212では、非インタレース補正部111が、再生画像の現在のタイミングがBフィールドの先頭であるか否かを判断する。Bフィールド先頭で無い場合、再生補正処理を終える。Bフィールド先頭であった場合ステップS1213へ処理を移す。 In step S <b> 1212, the non-interlace correction unit 111 determines whether the current timing of the reproduced image is the head of the B field. If it is not at the head of the B field, the reproduction correction process is terminated. If it is at the head of the B field, the process proceeds to step S1213.
ステップS1213では、非インタレース補正部111が、Bフィールド画像のズーム倍率が前のAフィールド画像のズーム倍率と同じになるように画像抽出範囲を変更する。 In step S1213, the non-interlace correction unit 111 changes the image extraction range so that the zoom magnification of the B field image is the same as the zoom magnification of the previous A field image.
以上説明した第6の実施の形態における記録処理及び再生補正処理の実行によって、下記の効果が得られる。 The following effects are obtained by executing the recording process and the reproduction correction process in the sixth embodiment described above.
図20(A)は、1つの画面に対する2つのフィールド(A,B)におけるズームイン方向での従来のインタレース記録時のズーム倍率目標値を示す図、図20(B)は、2つのフィールドにおけるズームイン方向での従来のインタレース記録時の画像抽出面積を示す図、図20(C)は、2つのフィールドにおける従来のインタレース記録時の画像ずれを示す図である。図21(A)は、2つのフィールドにおけるズームアウト方向での従来のインタレース記録時のズーム倍率目標値を示す図、図21(B)は、2つのフィールドにおけるズームアウト方向での従来のインタレース記録時の画像抽出面積を示す図である。 FIG. 20A is a diagram showing a zoom magnification target value at the time of conventional interlace recording in the zoom-in direction in two fields (A, B) for one screen, and FIG. 20B is a diagram in two fields. FIG. 20C is a diagram showing an image extraction area at the time of conventional interlace recording in the zoom-in direction, and FIG. 20C is a diagram showing an image shift at the time of conventional interlace recording in two fields. FIG. 21A is a diagram showing a zoom magnification target value at the time of conventional interlace recording in the zoom-out direction in two fields, and FIG. 21B is a diagram showing a conventional interface in the zoom-out direction in two fields. It is a figure which shows the image extraction area at the time of a race recording.
一方、図22(A)は、2つのフィールド(A,B)におけるズームイン方向での本実施の形態における非インタレース再生時のズーム倍率目標値を示す図、図22(B)は、2つのフィールドにおけるズームイン方向での本実施の形態における非インタレース再生時の画像抽出面積を示す図、図22(C)は、2つのフィールドにおける本実施の形態での非インタレース再生時の画像ずれを示す図である。図23(A)は、2つのフィールドにおけるズームアウト方向での本実施の形態における非インタレース再生時のズーム倍率目標値を示す図、図23(B)は、2つのフィールドにおけるズームアウト方向での本実施の形態における非インタレース再生時の画像抽出面積を示す図である。 On the other hand, FIG. 22A shows a zoom magnification target value at the time of non-interlaced reproduction in the present embodiment in the zoom-in direction in two fields (A, B), and FIG. FIG. 22C is a diagram showing an image extraction area at the time of non-interlaced reproduction in the present embodiment in the zoom-in direction in the field, and FIG. FIG. FIG. 23A is a diagram showing a zoom magnification target value at the time of non-interlaced reproduction in this embodiment in the zoom-out direction in two fields, and FIG. 23B is a zoom-out direction in two fields. It is a figure which shows the image extraction area at the time of the non-interlace reproduction | regeneration in this Embodiment.
従来のインタレース表示向けズーム駆動で、ズームイン方向にズーミング撮影した時に、図20(A)に示すようにズーム倍率を変えて、図20(B)に示すように画像を記録すると、図20(C)に示すように、AフィールドとBフィールドとの間に画像ずれが発生した画像がインタレース表示器113に再生されることになる。なお、図21(A),(B)に示すように、ズームアウト方向にズーミング撮影した時でも、同じ現象が発生する。
When zooming is performed in the zoom-in direction with the conventional zoom drive for interlaced display, if the zoom magnification is changed as shown in FIG. 20A and an image is recorded as shown in FIG. As shown in C), an image in which an image shift has occurred between the A field and the B field is reproduced on the
これに対して本実施の形態では、図22(A)に示すように、AフィールドとBフィールドのズーム倍率を揃えるように補正する。すなわち、図22(B)に示すように、Aフィールド側で画像抽出拡大を行なうようにし、これにより、図22(C)に示すように、AフィールドとBフィールドとの間での画像ずれが解消した画像が非インタレース表示器112に再生される。このように画角変化のある被写体映像をインタレース記録して、再生時にインタレース再生する画像記録再生装置において、プログレッシブ再生を選択しても、被写体部分でフィールド間の画像ずれが発生しないという効果がある。
On the other hand, in this embodiment, as shown in FIG. 22A, correction is performed so that the zoom magnifications of the A field and the B field are equal. That is, as shown in FIG. 22 (B), image extraction enlargement is performed on the A field side, and as a result, as shown in FIG. 22 (C), an image shift between the A field and the B field occurs. The canceled image is reproduced on the
なお、図23(A),(B)に示すように、ズームアウト方向にズーミング撮影した時でも、AフィールドとBフィールドのズーム倍率を揃えるように補正して、Bフィールド側で画像抽出拡大を行なうことによって、同じように、AフィールドとBフィールドとの間での画像ずれを解消できる。 As shown in FIGS. 23A and 23B, even when zooming is performed in the zoom-out direction, correction is performed so that the zoom magnifications of the A field and the B field are equalized, and the image extraction is enlarged on the B field side. By doing so, the image shift between the A field and the B field can be similarly eliminated.
〔他の実施の形態〕
なお、本発明の目的は、前述した各実施の形態の機能を実現するソフトウェアのプログラムコードを記録した記憶媒体を、システムまたは装置に供給し、そのシステムまたは装置のコンピュータ(またはCPU、MPU等)が記憶媒体に格納されたプログラムコードを読み出して実行することによっても達成される。
[Other Embodiments]
The object of the present invention is to supply a storage medium storing software program codes for realizing the functions of the above-described embodiments to a system or apparatus, and a computer (or CPU, MPU, etc.) of the system or apparatus. Is also achieved by reading and executing the program code stored in the storage medium.
この場合、記憶媒体から読み出されたプログラムコード自体が本発明の新規な機能を実現することになり、そのプログラムコードを記憶した記憶媒体およびプログラムは本発明を構成することになる。 In this case, the program code itself read from the storage medium realizes the novel function of the present invention, and the storage medium and program storing the program code constitute the present invention.
また、プログラムコードを供給するための記憶媒体としては、例えば、フレキシブルディスク、ハードディスク、光ディスク、光磁気ディスク、CD−ROM、CD−R、CD−RW、DVD−ROM、DVD−RAM、DVD−RW、DVD+RW、磁気テープ、不揮発性のメモリカード、ROM等を用いることができる。 The storage medium for supplying the program code is, for example, a flexible disk, hard disk, optical disk, magneto-optical disk, CD-ROM, CD-R, CD-RW, DVD-ROM, DVD-RAM, DVD-RW. DVD + RW, magnetic tape, nonvolatile memory card, ROM, etc. can be used.
また、コンピュータが読み出したプログラムコードを実行することにより、前述した各実施の形態の機能が実現されるだけでなく、そのプログラムコードの指示に基づき、コンピュータ上で稼動しているOS(オペレーティングシステム)等が実際の処理の一部または全部を行い、その処理によって前述した各実施の形態の機能が実現される場合も含まれる。 Further, by executing the program code read by the computer, not only the functions of the above-described embodiments are realized, but also an OS (Operating System) running on the computer based on the instruction of the program code. Includes a case where the functions of the above-described embodiments are realized by performing part or all of the actual processing.
更に、記憶媒体から読み出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書き込まれた後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPU等が実際の処理の一部または全部を行い、その処理によって前述した各実施の形態の機能が実現される場合も含まれる。 Further, after the program code read from the storage medium is written in a memory provided in a function expansion board inserted into the computer or a function expansion unit connected to the computer, the function expansion is performed based on the instruction of the program code. This includes the case where the CPU or the like provided in the board or the function expansion unit performs part or all of the actual processing, and the functions of the above-described embodiments are realized by the processing.
100 撮像部(撮像手段、変倍撮影手段)
101 焦点検出部
102 振れ検出部(振れ検出手段)
103 パンニング判断部(判断手段)
104 振れ補正制御部
105 フィールド揺量算出部(フィールド揺量算出手段)
106 画角制御部
107 ズーミング判断部(判断手段)
108 フィールド変倍量算出部(フィールド変倍量算出手段)
109 補正メタデータ付加取得部(補正データ取得手段)
110 記録再生部
111 非インタレース補正部(非インタレース補正手段)
112 非インタレース表示器(再生信号生成手段)
113 インタレース表示器
100 Imaging unit (imaging means, variable magnification imaging means)
101
103 Panning determination unit (determination means)
104 shake
106 View
108 Field scaling amount calculation unit (Field scaling amount calculation means)
109 Correction metadata addition acquisition unit (correction data acquisition means)
110 Recording / playback unit 111 Non-interlace correction unit (non-interlace correction means)
112 Non-interlaced display (reproduction signal generating means)
113 Interlace display
Claims (22)
自装置の振れを検出して検出信号を出力する振れ検出手段と、
前記撮像手段によって生成された画像信号と前記振れ検出手段によって出力された検出信号とに基づき、所定の撮影手法による撮影中であるか否かを判断する判断手段と、
前記判断手段によって前記所定の撮影手法による撮影中であると判断されたとき、前記振れ検出手段によって出力された検出信号と、前記撮像手段における被写体焦点情報とから、第1フィールド撮影時点と第2フィールド撮影時点との間に発生した自装置の被写体に対する振れを相殺するためのフィールド振れ補正量を算出するフィールド揺量算出手段と
を有することを特徴とする画像記録装置。 Imaging means for generating first and second field image signals by interlace scanning;
Shake detection means for detecting the shake of the device itself and outputting a detection signal;
A determination unit that determines whether or not shooting is performed by a predetermined shooting method based on the image signal generated by the imaging unit and the detection signal output by the shake detection unit;
When it is determined by the determining means that the image is being shot by the predetermined shooting method, the first field shooting time point and the second field shooting time are obtained from the detection signal output by the shake detecting means and the subject focus information in the image pickup means. An image recording apparatus comprising: field fluctuation amount calculating means for calculating a field shake correction amount for canceling out a shake of the subject apparatus with respect to a subject that occurs between the time of field shooting.
インタレース表示向けの手ぶれ補正値に、前記フィールド揺量算出手段によって算出されたフィールド振れ補正量を加算して得られた値を用いて前記光学振れ補正手段を駆動する駆動手段と、
前記駆動手段によって駆動されている前記光学振れ補正手段が動作しているときに前記撮像手段で生成された画像信号を記録する記録手段と
を更に有することを特徴とする請求項1記載の画像記録装置。 An optical shake correction unit that corrects a shake of a captured image due to a shake of the own device by deflecting an optical axis of the imaging unit;
Driving means for driving the optical shake correction means using a value obtained by adding the field shake correction amount calculated by the field shake amount calculation means to the camera shake correction value for interlaced display;
2. The image recording according to claim 1, further comprising recording means for recording an image signal generated by the imaging means when the optical shake correction means driven by the driving means is operating. apparatus.
インタレース表示向けの手ぶれ画像抽出範囲に、前記フィールド揺量算出手段によって算出されたフィールド振れ補正量を加算して得られた範囲を用いて前記電子振れ補正手段に補正を行わせる駆動手段と、
前記駆動手段によって駆動されている前記電子振れ補正手段が動作しているときに前記撮像手段で生成された画像信号を記録する記録手段と
を更に有することを特徴とする請求項1記載の画像記録装置。 An electronic shake correction unit that corrects a shake of a captured image due to a shake of the own device by selecting a range in which an image is to be output from an imaging area of the imaging unit;
A drive unit that causes the electronic shake correction unit to perform correction using a range obtained by adding a field shake correction amount calculated by the field shake amount calculation unit to a camera shake image extraction range for interlaced display;
The image recording according to claim 1, further comprising: a recording unit that records an image signal generated by the imaging unit when the electronic shake correcting unit driven by the driving unit is operating. apparatus.
画角変更指令信号に従い画角を変更する変倍撮影手段と、
前記撮像手段によって生成された画像信号と前記変倍撮影手段へ入力される画角変更指令信号とに基づき、所定の撮影手法による撮影中であるか否かを判断する判断手段と、
前記判断手段によって前記所定の撮影手法による撮影中であると判断されたとき、前記変倍撮影手段の変倍速度から、第1フィールド撮影時点と第2フィールド撮影時点との間に発生した前記変倍撮像手段による画角の変更量を相殺するためのフィールド変倍補正量を算出するフィールド変倍量算出手段と
を有することを特徴とする画像記録装置。 Imaging means for generating first and second field image signals by interlace scanning;
Zooming means for changing the angle of view according to the angle-of-view change command signal;
A determination unit that determines whether or not shooting is being performed by a predetermined shooting method based on an image signal generated by the imaging unit and an angle-of-view change command signal input to the variable magnification shooting unit;
When it is determined by the determining means that the image is being shot by the predetermined shooting method, the change occurring between the first field shooting time and the second field shooting time is determined from the zoom speed of the zoom shooting means. An image recording apparatus comprising: a field scaling amount calculation unit that calculates a field scaling correction amount for canceling a change amount of the angle of view by the magnification imaging unit.
変倍撮影光学系の画角を制御する画角制御手段と、
前記撮像手段によって生成された画像信号と前記画角制御手段による画角制御状態とに基づき、所定の撮影手法による撮影中であるか否かを判断する判断手段とを有し、
前記画角制御手段は、前記判断手段によって前記所定の撮影手法による撮影中であると判断されたとき、1フレーム単位で画角制御を行なうことを特徴とする画像記録装置。 Imaging means for generating an image signal by interlace scanning;
An angle-of-view control means for controlling the angle of view of the variable magnification optical system;
Determination means for determining whether or not photographing by a predetermined photographing technique is performed based on the image signal generated by the imaging means and the angle of view control state by the angle of view control means;
The image recording apparatus according to claim 1, wherein the angle-of-view control means performs angle-of-view control in units of one frame when it is determined by the determining means that the predetermined photographing technique is being performed.
前記フィールド変倍量算出手段によって算出されたフィールド変倍補正量を用いて前記画角制御手段を動作させる駆動手段と、
前記駆動手段によって駆動されている前記画角制御手段が動作しているときに前記撮像手段で生成された画像信号を記録する記録手段と
を更に有することを特徴とする請求項6記載の画像記録装置。 An angle-of-view control means for changing a magnification by selecting a range to output an image from an imaging area of the imaging means;
Driving means for operating the angle-of-view control means using the field magnification correction amount calculated by the field magnification amount calculating means;
The image recording apparatus according to claim 6, further comprising: a recording unit that records an image signal generated by the imaging unit when the angle of view control unit driven by the driving unit is operating. apparatus.
インタレース表示向けの手ぶれ画像抽出範囲に、前記補正データ取得手段によって取得されたフィールド振れ補正量を加算して画像抽出範囲を決定する非インタレース補正手段と、
前記補正データ取得手段によって取得された画像データから、前記非インタレース補正手段によって決定された画像抽出範囲に位置する画像データを抽出して、前記画像記録装置が被写体に対して揺れた量が相殺された再生信号を生成する再生信号生成手段と
を有することを特徴とする画像再生装置。 Image data of the first and second fields is acquired by interlace scanning, and the image recording apparatus shakes with respect to the subject between the shooting time of the first field and the shooting time of the second field. Correction data acquisition means for acquiring a field shake correction amount for offsetting the amount as sub data;
A non-interlace correction unit that determines an image extraction range by adding a field shake correction amount acquired by the correction data acquisition unit to a camera shake image extraction range for interlaced display;
Image data located in the image extraction range determined by the non-interlace correction means is extracted from the image data acquired by the correction data acquisition means, and the amount of shaking of the image recording apparatus with respect to the subject cancels out. And a reproduction signal generating means for generating the reproduced signal.
前記補正データ取得手段によって取得されたフィールド振れ補正量に基づき、前記第1及び第2のフィールドでの画角量が同じなるように画像抽出範囲を決定する非インタレース補正手段と、
前記補正データ取得手段によって取得された画像データから、前記非インタレース補正手段によって決定された画像抽出範囲に位置する画像データを抽出して、前記画像記録装置が被写体に対して変倍した画角量が相殺された再生信号を生成する再生信号生成手段と
を有することを特徴とする画像再生装置。 Image data of the first and second fields is acquired by interlace scanning, and the image recording device scales the subject between the shooting time of the first field and the shooting time of the second field. Correction data acquisition means for acquiring, as sub-data, a field scaling correction amount for offsetting the angle of view
Non-interlace correction means for determining an image extraction range based on the field shake correction amount acquired by the correction data acquisition means so that the field angle amounts in the first and second fields are the same;
An image angle obtained by extracting image data located in an image extraction range determined by the non-interlace correction unit from the image data acquired by the correction data acquisition unit, and the image recording apparatus scaling the object. And a reproduction signal generating means for generating a reproduction signal in which the amount is canceled out.
自装置の振れを検出して検出信号を出力する振れ検出ステップと、
前記撮像ステップによって生成された画像信号と前記振れ検出ステップによって出力された検出信号とに基づき、所定の撮影手法による撮影中であるか否かを判断する判断ステップと、
前記判断ステップによって前記所定の撮影手法による撮影中であると判断されたとき、前記振れ検出ステップによって出力された検出信号と、前記撮像ステップにおける被写体焦点情報とから、第1フィールド撮影時点と第2フィールド撮影時点との間に発生した自装置の被写体に対する振れを相殺するためのフィールド振れ補正量を算出するフィールド揺量算出ステップと
を有することを特徴とする画像記録方法。 An imaging step of generating image signals of the first and second fields by interlace scanning;
A shake detection step of detecting a shake of the device itself and outputting a detection signal;
A determination step of determining whether or not shooting by a predetermined shooting technique is performed based on the image signal generated by the shooting step and the detection signal output by the shake detection step;
When it is determined by the determination step that the image is being shot by the predetermined shooting method, the first field shooting time point and the second field shooting time are obtained from the detection signal output by the shake detection step and the subject focus information in the shooting step. An image recording method comprising: a field fluctuation amount calculating step for calculating a field shake correction amount for canceling out a shake of the subject apparatus with respect to a subject generated between the time of field shooting.
画角変更指令信号に従い画角を変更する変倍撮影ステップと、
前記撮像ステップによって生成された画像信号と前記変倍撮影ステップで使用した画角変更指令信号とに基づき、所定の撮影手法による撮影中であるか否かを判断する判断ステップと、
前記判断ステップによって前記所定の撮影手法による撮影中であると判断されたとき、前記変倍撮影ステップによる画角変更速度から、第1フィールド撮影時点と第2フィールド撮影時点との間に発生した前記変倍撮像ステップによる画角の変更量を相殺するためのフィールド変倍補正量を算出するフィールド変倍量算出ステップと
を有することを特徴とする画像記録方法。 An imaging step of generating image signals of the first and second fields by interlace scanning;
A variable magnification shooting step for changing the angle of view in accordance with the angle-of-view change command signal;
A determination step of determining whether or not shooting by a predetermined shooting method is performed based on the image signal generated in the shooting step and the view angle change command signal used in the zoom shooting step;
When it is determined by the determination step that the image is being shot by the predetermined shooting method, the angle generated between the first field shooting time point and the second field shooting time point is determined from the view angle changing speed by the variable magnification shooting step. An image recording method comprising: a field scaling amount calculation step for calculating a field scaling correction amount for canceling a change amount of the angle of view in the scaling imaging step.
変倍撮影光学系の画角を制御する画角制御ステップと、
前記撮像ステップによって生成された画像信号と前記画角制御ステップによる画角制御状態とに基づき、所定の撮影手法による撮影中であるか否かを判断する判断ステップとを有し、
前記画角制御ステップは、前記判断ステップによって前記所定の撮影手法による撮影中であると判断されたとき、1フレーム単位で画角制御を行なうことを特徴とする画像記録方法。 An imaging step of generating an image signal by interlace scanning;
An angle-of-view control step for controlling the angle of view of the variable magnification optical system;
A determination step of determining whether or not shooting by a predetermined shooting method is performed based on the image signal generated by the shooting step and the view angle control state by the view angle control step;
The image recording method according to claim 1, wherein the angle-of-view control step performs angle-of-view control for each frame when it is determined by the determining step that the image is being shot by the predetermined shooting method.
インタレース表示向けの手ぶれ画像抽出範囲に、前記補正データ取得ステップによって取得されたフィールド振れ補正量を加算して画像抽出範囲を決定する非インタレース補正ステップと、
前記補正データ取得ステップによって取得された画像データから、前記非インタレース補正ステップによって決定された画像抽出範囲に位置する画像データを抽出して、前記画像記録装置が被写体に対して揺れた量が相殺された再生信号を生成する再生信号生成ステップと
を有することを特徴とする画像再生方法。 Image data of the first and second fields is acquired by interlace scanning, and the image recording apparatus shakes with respect to the subject between the shooting time of the first field and the shooting time of the second field. A correction data acquisition step of acquiring, as sub data, a field shake correction amount for offsetting the amount;
A non-interlace correction step of determining an image extraction range by adding the field shake correction amount acquired by the correction data acquisition step to a camera shake image extraction range for interlaced display;
Image data located in the image extraction range determined by the non-interlace correction step is extracted from the image data acquired by the correction data acquisition step, and the amount of shaking of the image recording apparatus with respect to the subject cancels out. And a reproduction signal generation step of generating the reproduced signal.
前記補正データ取得ステップによって取得されたフィールド振れ補正量に基づき、前記第1及び第2のフィールドでの画角量が同じなるように画像抽出範囲を決定する非インタレース補正ステップと、
前記補正データ取得ステップによって取得された画像データから、前記非インタレース補正ステップによって決定された画像抽出範囲に位置する画像データを抽出して、前記画像記録装置が被写体に対して変倍した画角量が相殺された再生信号を生成する再生信号生成ステップと
を有することを特徴とする画像再生方法。 Image data of the first and second fields is acquired by interlace scanning, and the image recording device scales the subject between the shooting time of the first field and the shooting time of the second field. A correction data acquisition step for acquiring, as sub data, a field scaling correction amount for canceling the angle of view that has been made,
A non-interlace correction step of determining an image extraction range based on the field shake correction amount acquired in the correction data acquisition step so that the angle of view in the first and second fields is the same;
An image angle obtained by extracting image data located in the image extraction range determined by the non-interlace correction step from the image data acquired by the correction data acquisition step, and the image recording apparatus scaling the object. And a reproduction signal generation step of generating a reproduction signal in which the amount is canceled out.
自装置の振れを検出して検出信号を出力する振れ検出ステップと、
前記撮像ステップによって生成された画像信号と前記振れ検出ステップによって出力された検出信号とに基づき、所定の撮影手法による撮影中であるか否かを判断する判断ステップと、
前記判断ステップによって前記所定の撮影手法による撮影中であると判断されたとき、前記振れ検出ステップによって出力された検出信号と、前記撮像ステップにおける被写体焦点情報とから、第1フィールド撮影時点と第2フィールド撮影時点との間に発生した自装置の被写体に対する振れを相殺するためのフィールド振れ補正量を算出するフィールド揺量算出ステップと
を有することを特徴とするコンピュータで実行可能なプログラム。 An imaging step of generating image signals of the first and second fields by interlace scanning;
A shake detection step of detecting a shake of the device itself and outputting a detection signal;
A determination step of determining whether or not shooting by a predetermined shooting technique is performed based on the image signal generated by the shooting step and the detection signal output by the shake detection step;
When it is determined by the determination step that the image is being shot by the predetermined shooting method, the first field shooting time point and the second field shooting time are obtained from the detection signal output by the shake detection step and the subject focus information in the shooting step. A computer-executable program, comprising: a field fluctuation amount calculating step for calculating a field shake correction amount for canceling out a shake of the subject apparatus with respect to a subject generated between the time of field shooting.
画角変更指令信号に従い画角を変更する変倍撮影ステップと、
前記撮像ステップによって生成された画像信号と前記変倍撮影ステップで使用した画角変更指令信号とに基づき、所定の撮影手法による撮影中であるか否かを判断する判断ステップと、
前記判断ステップによって前記所定の撮影手法による撮影中であると判断されたとき、前記変倍撮影ステップによる画角変更速度から、第1フィールド撮影時点と第2フィールド撮影時点との間に発生した前記変倍撮像ステップによる画角の変更量を相殺するためのフィールド変倍補正量を算出するフィールド変倍量算出ステップと
を有することを特徴とするコンピュータで実行可能なプログラム。 An imaging step of generating image signals of the first and second fields by interlace scanning;
A variable magnification shooting step for changing the angle of view in accordance with the angle-of-view change command signal;
A determination step of determining whether or not shooting by a predetermined shooting method is performed based on the image signal generated in the shooting step and the view angle change command signal used in the zoom shooting step;
When it is determined by the determination step that the image is being shot by the predetermined shooting method, the angle generated between the first field shooting time point and the second field shooting time point is determined from the view angle changing speed by the variable magnification shooting step. A computer-executable program comprising: a field scaling amount calculation step for calculating a field scaling correction amount for canceling a change amount of a field angle due to a scaling imaging step.
変倍撮影光学系の画角を制御する画角制御ステップと、
前記撮像ステップによって生成された画像信号と前記画角制御ステップによる画角制御状態とに基づき、所定の撮影手法による撮影中であるか否かを判断する判断ステップとを有し、
前記画角制御ステップは、前記判断ステップによって前記所定の撮影手法による撮影中であると判断されたとき、1フレーム単位で画角制御を行なうことを特徴とするコンピュータで実行可能なプログラム。 An imaging step of generating an image signal by interlace scanning;
An angle-of-view control step for controlling the angle of view of the variable magnification optical system;
A determination step of determining whether or not shooting by a predetermined shooting method is performed based on the image signal generated by the shooting step and the view angle control state by the view angle control step;
The computer-executable program characterized in that the angle-of-view control step performs angle-of-view control in units of one frame when it is determined in the determining step that shooting is being performed by the predetermined shooting method.
インタレース表示向けの手ぶれ画像抽出範囲に、前記補正データ取得ステップによって取得されたフィールド振れ補正量を加算して画像抽出範囲を決定する非インタレース補正ステップと、
前記補正データ取得ステップによって取得された画像データから、前記非インタレース補正ステップによって決定された画像抽出範囲に位置する画像データを抽出して、前記画像記録装置が被写体に対して揺れた量が相殺された再生信号を生成する再生信号生成ステップと
を有することを特徴とするコンピュータで実行可能なプログラム。 Image data of the first and second fields is acquired by interlace scanning, and the image recording apparatus shakes with respect to the subject between the shooting time of the first field and the shooting time of the second field. A correction data acquisition step of acquiring, as sub data, a field shake correction amount for offsetting the amount;
A non-interlace correction step of determining an image extraction range by adding the field shake correction amount acquired by the correction data acquisition step to a camera shake image extraction range for interlaced display;
Image data located in the image extraction range determined by the non-interlace correction step is extracted from the image data acquired by the correction data acquisition step, and the amount of shaking of the image recording apparatus with respect to the subject cancels out. A computer-executable program comprising: a reproduction signal generation step for generating a reproduced signal.
前記補正データ取得ステップによって取得されたフィールド振れ補正量に基づき、前記第1及び第2のフィールドでの画角量が同じなるように画像抽出範囲を決定する非インタレース補正ステップと、
前記補正データ取得ステップによって取得された画像データから、前記非インタレース補正ステップによって決定された画像抽出範囲に位置する画像データを抽出して、前記画像記録装置が被写体に対して変倍した画角量が相殺された再生信号を生成する再生信号生成ステップと
を有することを特徴とするコンピュータで実行可能なプログラム。 Image data of the first and second fields is acquired by interlace scanning, and the image recording device scales the subject between the shooting time of the first field and the shooting time of the second field. A correction data acquisition step for acquiring, as sub data, a field scaling correction amount for canceling the angle of view that has been made,
A non-interlace correction step of determining an image extraction range based on the field shake correction amount acquired in the correction data acquisition step so that the angle of view in the first and second fields is the same;
An image angle obtained by extracting image data located in the image extraction range determined by the non-interlace correction step from the image data acquired by the correction data acquisition step, and the image recording apparatus scaling the object. A computer-executable program comprising: a reproduction signal generation step for generating a reproduction signal in which the amount is canceled out.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004066050A JP4886172B2 (en) | 2004-03-09 | 2004-03-09 | Image recording apparatus, image recording method, and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004066050A JP4886172B2 (en) | 2004-03-09 | 2004-03-09 | Image recording apparatus, image recording method, and program |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005260357A true JP2005260357A (en) | 2005-09-22 |
| JP2005260357A5 JP2005260357A5 (en) | 2009-06-18 |
| JP4886172B2 JP4886172B2 (en) | 2012-02-29 |
Family
ID=35085698
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004066050A Expired - Fee Related JP4886172B2 (en) | 2004-03-09 | 2004-03-09 | Image recording apparatus, image recording method, and program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4886172B2 (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007132646A1 (en) * | 2006-05-12 | 2007-11-22 | Opt Corporation | Dynamic image display method, dynamic image display system, and wide-angle dynamic image capturing device |
| JP2008048069A (en) * | 2006-08-11 | 2008-02-28 | Olympus Imaging Corp | Image photographing device, control method of image photographing device and control program of image photographing device |
| JP2010219693A (en) * | 2009-03-13 | 2010-09-30 | Canon Inc | Imaging device and imaging method |
| JP2011103550A (en) * | 2009-11-10 | 2011-05-26 | Olympus Imaging Corp | Device and method for sensing image |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6278979A (en) * | 1985-10-02 | 1987-04-11 | Toshiba Corp | Picture processor |
| JPH0275284A (en) * | 1988-09-09 | 1990-03-14 | Canon Inc | Image pickup device |
| JPH0393369A (en) * | 1989-09-05 | 1991-04-18 | Toshiba Corp | Pattern blur correction device for video camera |
| JPH0481079A (en) * | 1990-07-20 | 1992-03-13 | Kawaju Gifu Eng Kk | Picture stablizer for video camera |
| JPH04268885A (en) * | 1991-02-22 | 1992-09-24 | Matsushita Electric Ind Co Ltd | High picture quality image swing correction method, and device with image swing correction device |
| JPH066669A (en) * | 1992-06-22 | 1994-01-14 | Hitachi Ltd | Camcorder |
| JP2000106661A (en) * | 1998-07-10 | 2000-04-11 | Canon Inc | Image processing method and system and device |
| JP2000106664A (en) * | 1998-09-29 | 2000-04-11 | Canon Inc | Image processor, image processing method, recording and reproducing device and computer-readable storage medium |
| JP2002142189A (en) * | 2000-11-06 | 2002-05-17 | Canon Inc | Image processor, image processing method, and storage medium |
-
2004
- 2004-03-09 JP JP2004066050A patent/JP4886172B2/en not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6278979A (en) * | 1985-10-02 | 1987-04-11 | Toshiba Corp | Picture processor |
| JPH0275284A (en) * | 1988-09-09 | 1990-03-14 | Canon Inc | Image pickup device |
| JPH0393369A (en) * | 1989-09-05 | 1991-04-18 | Toshiba Corp | Pattern blur correction device for video camera |
| JPH0481079A (en) * | 1990-07-20 | 1992-03-13 | Kawaju Gifu Eng Kk | Picture stablizer for video camera |
| JPH04268885A (en) * | 1991-02-22 | 1992-09-24 | Matsushita Electric Ind Co Ltd | High picture quality image swing correction method, and device with image swing correction device |
| JPH066669A (en) * | 1992-06-22 | 1994-01-14 | Hitachi Ltd | Camcorder |
| JP2000106661A (en) * | 1998-07-10 | 2000-04-11 | Canon Inc | Image processing method and system and device |
| JP2000106664A (en) * | 1998-09-29 | 2000-04-11 | Canon Inc | Image processor, image processing method, recording and reproducing device and computer-readable storage medium |
| JP2002142189A (en) * | 2000-11-06 | 2002-05-17 | Canon Inc | Image processor, image processing method, and storage medium |
Non-Patent Citations (5)
| Title |
|---|
| 古賀良男: "カメラ一体型VTRの手ブレ補正機能,圧電振動ジャイロを使って誤動作を減らす", 日経エレクトロニクス, vol. 541, JPN6009001700, 25 November 1991 (1991-11-25), pages 217 - 226, ISSN: 0001584079 * |
| 河村尚登: "画像・映像コンテンツとメタデータの技術動向 —特にDIG35,MPEG7動向について—", アドバンスト・データベース・シンポジウム'98:情報処理学会シンポジウム論文集, vol. 99, no. 12, JPN6009047771, 6 December 1999 (1999-12-06), pages 89 - 97, ISSN: 0001418357 * |
| 河村正行;長谷川教通: "デジタルビデオカメラ緊急発進!", ビデオサロン, vol. 30, no. 3, JPN6010018000, 1 September 1995 (1995-09-01), pages 19 - 33, ISSN: 0001584078 * |
| 馬場信幸: "民生用デジタルビデオ規格DVフォーマット", ビデオΑ, vol. 11, no. 11, JPN6010017997, 1 November 1995 (1995-11-01), pages 31 - 37, ISSN: 0001584077 * |
| 高柳健次郎,高橋重雄: ""1.7 再びテレビジョンとは"", 解説テレビジョン, vol. 初版, JPN6009027957, 15 November 1943 (1943-11-15), pages 18 - 21, ISSN: 0001340512 * |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007132646A1 (en) * | 2006-05-12 | 2007-11-22 | Opt Corporation | Dynamic image display method, dynamic image display system, and wide-angle dynamic image capturing device |
| JP2008048069A (en) * | 2006-08-11 | 2008-02-28 | Olympus Imaging Corp | Image photographing device, control method of image photographing device and control program of image photographing device |
| JP2010219693A (en) * | 2009-03-13 | 2010-09-30 | Canon Inc | Imaging device and imaging method |
| JP2011103550A (en) * | 2009-11-10 | 2011-05-26 | Olympus Imaging Corp | Device and method for sensing image |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4886172B2 (en) | 2012-02-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2219364B1 (en) | Imaging device and image reproduction device | |
| US5506912A (en) | Imaging device capable of tracking an object | |
| US6122004A (en) | Image stabilizing circuit for a camcorder | |
| KR100325491B1 (en) | Panorama image creation method and device | |
| JP3168492B2 (en) | Imaging device | |
| JP3103894B2 (en) | Apparatus and method for correcting camera shake of video data | |
| US7783128B2 (en) | Method and apparatus for correcting motion distortion and lens distortion of image-taking video signals | |
| JP5548552B2 (en) | Imaging device | |
| JP4674620B2 (en) | Image processing apparatus, image processing method, and program | |
| KR20100063829A (en) | Image processing device and method | |
| JP2007219289A (en) | Imaging apparatus | |
| JP4390068B2 (en) | Method for correcting distortion of captured image signal and distortion correction apparatus for captured image signal | |
| JP4924228B2 (en) | Image processing apparatus, image processing method, and program | |
| JP4900939B2 (en) | Method for controlling imaging apparatus | |
| JP4876066B2 (en) | Video processing apparatus, video processing system, video processing method, and program | |
| JP6031670B2 (en) | Imaging device | |
| JP4886172B2 (en) | Image recording apparatus, image recording method, and program | |
| US5493333A (en) | Vibration compensator which corrects for vibration errors based on servocontrol unit errors | |
| JP2009044329A (en) | Program, image processing method, and image processor | |
| JPH066666A (en) | Image pickup device | |
| JPH06133211A (en) | Optical device with picture fluctuation correction function | |
| JP2007259197A (en) | Moving picture decoding and reproducing device with camera shake compensation function, and method | |
| JP2007201570A (en) | Image processor, photography apparatus, image processing method and control program | |
| JP2001111879A (en) | Iimage pickup device | |
| JP2010010798A (en) | Moving picture processing unit, image recording device integrated with camera, moving picture reproducing unit, remote operation system, moving picture processing method, moving picture processing program, storage medium, and moving picture processing system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20060418 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070226 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070226 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20070626 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090428 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090609 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090805 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090915 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091214 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20100106 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20100402 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111209 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141216 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4886172 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141216 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |