CN114764072A - Vehicle inspection system - Google Patents
Vehicle inspection system Download PDFInfo
- Publication number
- CN114764072A CN114764072A CN202011641915.2A CN202011641915A CN114764072A CN 114764072 A CN114764072 A CN 114764072A CN 202011641915 A CN202011641915 A CN 202011641915A CN 114764072 A CN114764072 A CN 114764072A
- Authority
- CN
- China
- Prior art keywords
- vehicle
- inspection
- inspected
- radiation
- area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000007689 inspection Methods 0.000 title claims abstract description 305
- 230000005855 radiation Effects 0.000 claims abstract description 98
- 238000012544 monitoring process Methods 0.000 claims description 24
- 238000012423 maintenance Methods 0.000 claims description 18
- 230000003993 interaction Effects 0.000 claims description 6
- 230000009286 beneficial effect Effects 0.000 abstract description 4
- 230000032258 transport Effects 0.000 description 38
- 238000000034 method Methods 0.000 description 15
- 230000008569 process Effects 0.000 description 11
- 230000008901 benefit Effects 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 239000003638 chemical reducing agent Substances 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000002955 isolation Methods 0.000 description 3
- 230000033001 locomotion Effects 0.000 description 3
- 230000004224 protection Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 241000283070 Equus zebra Species 0.000 description 1
- 206010063385 Intellectualisation Diseases 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000002594 fluoroscopy Methods 0.000 description 1
- 230000014509 gene expression Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012806 monitoring device Methods 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 230000033764 rhythmic process Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N23/00—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00
- G01N23/02—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by transmitting the radiation through the material
- G01N23/04—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by transmitting the radiation through the material and forming images of the material
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V5/00—Prospecting or detecting by the use of ionising radiation, e.g. of natural or induced radioactivity
- G01V5/20—Detecting prohibited goods, e.g. weapons, explosives, hazardous substances, contraband or smuggled objects
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- Chemical & Material Sciences (AREA)
- Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- High Energy & Nuclear Physics (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geophysics (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
Abstract
The present disclosure provides a vehicle inspection system, comprising: the system comprises a vehicle inspection field, a vehicle inspection system and a vehicle inspection system, wherein the vehicle inspection field comprises a vehicle entrance, a radiation inspection area, a manual inspection area and a vehicle exit; the radiation inspection device is arranged in the radiation inspection area and is configured to perform radiation inspection on the vehicle to be inspected entering the radiation inspection area; the on-site transportation device is used for receiving the vehicle to be inspected from the vehicle inlet, conveying the vehicle to be inspected to the radiation inspection device, and carrying the vehicle to be inspected to a target position after radiation inspection; and the control device is in signal connection with the in-field transportation device and is configured to schedule the in-field transportation device to bear the detected vehicle subjected to radiation inspection to reach the target position according to the scanning result of the radiation inspection device, wherein the vehicle outlet is taken as the target position when the scanning result shows that the vehicle to be inspected has no security suspicion, and the manual inspection area is taken as the target position when the scanning result shows that the vehicle to be inspected has security suspicion. The vehicle inspection system is beneficial to improving the security inspection passing rate of the vehicle inspection system.
Description
Technical Field
The present disclosure relates to the field of safety inspection technology, and more particularly, to a vehicle inspection system.
Background
When the vehicle is subjected to safety inspection, the vehicle is carried and parked, which is one of the main factors influencing the working efficiency of the vehicle inspection system. In addition, in the related art, the vehicle inspection system generally only considers the radiation inspection part, and does not consider the manual inspection of the suspected vehicle after the radiation inspection, which affects the final inspection efficiency of the vehicle.
Disclosure of Invention
The present disclosure provides a vehicle inspection system, comprising:
the vehicle inspection field comprises a vehicle entrance, a radiation inspection area, a manual inspection area and a vehicle exit;
the radiation inspection device is arranged in the radiation inspection area and is configured to perform radiation inspection on a vehicle to be inspected entering the radiation inspection area;
the on-site transportation device is used for receiving a vehicle to be inspected from the vehicle inlet, conveying the vehicle to be inspected to the radiation inspection device and carrying the vehicle to be inspected to a target position after radiation inspection;
and the control device is in signal connection with the in-field transportation device and is configured to schedule the in-field transportation device to carry the inspected vehicle subjected to radiation inspection to reach the target position according to the scanning result of the radiation inspection device, wherein the vehicle outlet is taken as the target position when the scanning result shows that the vehicle to be inspected is not in a security suspicion, and the manual inspection area is taken as the target position when the scanning result shows that the vehicle to be inspected is in a security suspicion.
In some embodiments, the radiation inspection apparatus comprises a plurality of scanning devices.
In some embodiments, the on-site transport device includes a plurality of automated guided vehicles.
In some embodiments, a pedestrian passageway is included, the pedestrian passageway being disposed outside the vehicle inspection yard, communicating the vehicle entrance and the vehicle exit.
In some embodiments, the vehicle inspection system further comprises a bag inspection device and/or a personnel inspection device disposed on the pedestrian walkway configured to inspect personnel and bags passing through the pedestrian walkway.
In some embodiments, the vehicle inspection field further includes a manual inspection waiting area, when the scanning result indicates that the vehicle to be inspected is suspected of being safe, the control device is further configured to, in the case that the manual inspection area is full of vehicles to be inspected, schedule the vehicle to be inspected after the vehicle to be inspected, which is carried by the intra-field transportation device after the radiation inspection, to enter the manual inspection waiting area for waiting before the vehicle to be inspected, which is carried by the intra-field transportation device after the radiation inspection, is scheduled to reach the target position.
In some embodiments, the artificial interrogation waiting area is located between the radiation inspection area and the artificial interrogation area.
In some embodiments, a charging device is also included, the charging device being disposed within the vehicle inspection yard and configured to charge the yard transportation device.
In some embodiments, the vehicle inspection system further comprises a power distribution control room disposed within the vehicle inspection field and configured to provision power to the electrical devices of the vehicle inspection system.
In some embodiments, the vehicle inspection system further comprises a monitoring room, wherein the monitoring room is arranged in the vehicle inspection field, and a display for displaying a scanned image of the vehicle to be inspected and a human-computer interaction device in signal connection with the control device are arranged in the monitoring room.
In some embodiments, the vehicle inspection yard further comprises an equipment service area for servicing the radiation inspection device and/or the in-yard transportation device.
In some embodiments, the vehicle inspection yard includes a plurality of side-by-side arranged vehicle entrances and a plurality of side-by-side arranged vehicle exits.
In some embodiments, the vehicle entrance and the vehicle exit are disposed at opposite ends of the vehicle inspection field, respectively, and the radiation inspection zone is located between the vehicle entrance and the vehicle exit.
In some embodiments, the vehicle inspection yard further comprises an entrance parking interchange area disposed inboard of the vehicle entrance and an exit pick-up interchange area disposed inboard of the vehicle exit.
Based on this open vehicle inspection system utilizes conveyer in the field as supplementary handling tool, vehicle inspection system passes through conveyer in the field and realizes people's car reposition of redundant personnel, and the vehicle of waiting to examine is sent into the radiation inspection device automatically and is accepted the radiation inspection, and the suspect vehicle that detects through the radiation inspection is sent to the manual inspection district automatically and is carried out the manual inspection, and vehicle safety inspection is whole need not the driver and participates in, does benefit to the security inspection throughput of promotion vehicle inspection system.
Other features of the present disclosure and advantages thereof will become apparent from the following detailed description of exemplary embodiments thereof, which proceeds with reference to the accompanying drawings.
Drawings
The accompanying drawings, which are included to provide a further understanding of the disclosure and are incorporated in and constitute a part of this application, illustrate embodiment(s) of the disclosure and together with the description serve to explain the disclosure and not to limit the disclosure. In the drawings:
fig. 1 is a schematic overall arrangement diagram of a vehicle inspection system of an embodiment of the present disclosure.
Fig. 2 is a block diagram of a vehicle safety inspection process using the vehicle inspection system according to the embodiment of the present disclosure.
Fig. 3 is a schematic view illustrating a scanning flow of the automated guided vehicle and the scanning device in the vehicle inspection system to perform the radiation inspection on the vehicle to be inspected;
FIG. 4 is a schematic diagram of an automated guided vehicle and scanning equipment combination in a vehicle inspection system according to an embodiment of the present disclosure;
FIG. 5 is a schematic view of a plate link conveyor of a scanning apparatus in a vehicle inspection system according to an embodiment of the present disclosure;
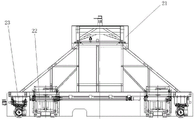
FIG. 6 is a front view of an automated guided vehicle of the vehicle inspection system of an embodiment of the present disclosure;
FIG. 7 is a left side view of an automated guided vehicle of the vehicle inspection system of an embodiment of the present disclosure;
fig. 8 is a top view of an automated guided vehicle of a vehicle inspection system according to an embodiment of the present disclosure.
Detailed Description
The technical solutions in the embodiments of the present disclosure will be clearly and completely described below with reference to the drawings in the embodiments of the present disclosure, and it is obvious that the described embodiments are only a part of the embodiments of the present disclosure, and not all of the embodiments. The following description of at least one exemplary embodiment is merely illustrative in nature and is in no way intended to limit the disclosure, its application, or uses. All other embodiments, which can be derived by a person skilled in the art from the embodiments disclosed herein without making any creative effort, shall fall within the protection scope of the present disclosure.
The relative arrangement of the components and steps, the numerical expressions, and numerical values set forth in these embodiments do not limit the scope of the present disclosure unless specifically stated otherwise. Meanwhile, it should be understood that the sizes of the respective portions shown in the drawings are not drawn in an actual proportional relationship for the convenience of description. Techniques, methods, and apparatus known to those of ordinary skill in the relevant art may not be discussed in detail but are intended to be part of the specification where appropriate. In all examples shown and discussed herein, any particular value should be construed as exemplary only and not as limiting. Thus, other examples of the exemplary embodiments may have different values. It should be noted that: like reference numbers and letters refer to like items in the following figures, and thus, once an item is defined in one figure, it need not be discussed further in subsequent figures.
In the description of the present disclosure, it should be understood that the terms "first", "second", etc. are used to define the components, and are used only for convenience of distinguishing the corresponding components, and if not otherwise stated, the terms have no special meaning, and thus, should not be construed as limiting the scope of the present disclosure.
In the description of the present disclosure, it is to be understood that the directions or positional relationships indicated by the directional terms such as "front, rear, upper, lower, left, right", "lateral, vertical, horizontal" and "top, bottom", etc., are generally based on the directions or positional relationships shown in the drawings, and are provided only for convenience of description and for simplicity of description, and in the case of not making a reverse description, these directional terms do not indicate and imply that the device or element referred to must have a particular orientation or be constructed and operated in a particular orientation, and therefore, should not be considered as limiting the scope of the present disclosure; the terms "inner and outer" refer to the inner and outer relative to the profile of the respective component itself.
As shown in fig. 1, the vehicle inspection system of the embodiment of the present disclosure mainly includes a vehicle inspection field 110, a radiation inspection apparatus 131, a field transportation apparatus 141, and a control apparatus 174.
As shown in fig. 1, the vehicle inspection area 110 includes a vehicle entrance 111, a radiation inspection area 113, a human examination area 114, and a vehicle exit 112.
The radiation inspection device 131 is provided in the radiation inspection zone 113, and is configured to perform radiation inspection on a vehicle to be inspected that enters the radiation inspection zone 113.
The on-site transportation device 141 is used for receiving the vehicle to be inspected from the vehicle entrance 111 and transporting the vehicle to be inspected to the radiation inspection device 131 so that the vehicle to be inspected is subjected to radiation inspection, and after the vehicle to be inspected is subjected to radiation inspection, the vehicle to be inspected carrying radiation reaches its target position. The control device 174 is in signal connection with the on-site transportation device 141, and is configured to schedule the on-site transportation device 141 to carry the inspected vehicle after the radiation inspection to the target position according to the scanning result of the radiation inspection device 131. The scanning result of the radiation inspection apparatus 131 indicates that the vehicle exit 112 is the target position if the vehicle to be inspected is not suspected, and the scanning result indicates that the vehicle to be inspected is suspected to be the target position if the manual inspection area 114 is the target position.
The vehicle inspection system of the embodiment of the present disclosure utilizes the in-field transportation device 141 as an auxiliary carrying tool, the vehicle inspection system realizes people and vehicle shunting through the in-field transportation device 141, the vehicle to be inspected is automatically sent into the radiation inspection device 131 to receive radiation inspection, the suspected vehicle detected through the radiation inspection is automatically sent to the manual inspection area 114 to be manually inspected, no driver is required to participate in the whole process of the vehicle safety inspection, the security inspection passing rate of the vehicle inspection system is favorably improved, and therefore, the whole security inspection scheme that the vehicle efficiently passes is provided. The vehicle inspection system is suitable for small vehicle safety inspection, but can also be suitable for medium-sized or large vehicle inspection.
As shown in fig. 1, in some embodiments, the radiation inspection apparatus 131 may include multiple scanning devices. The radiation inspection apparatus 131 shown in fig. 1 includes three scanning devices. The number of scanning devices can be set appropriately based on the flow rate of the vehicle to be inspected.
As shown in FIG. 1, in some embodiments, the on-site transport 141 includes a plurality of Automated Guided Vehicles (AGVs). The radiation inspection apparatus 131 shown in fig. 1 includes six automated guided vehicles. The automatic guide transport vechicle need not the track restriction, and the transfer route is more nimble. The number of automated guided vehicles may be configured according to the number of scanning devices, for example, two automated guided vehicles per scanning device. In addition, more automated guided vehicles may be provided as spare or transition automated guided vehicles.
Additionally, as shown in fig. 1, in some embodiments, the vehicle inspection system may further include a pedestrian passageway 121, the pedestrian passageway 121 being disposed outside the vehicle inspection yard 110, communicating the vehicle entrance 111 and the vehicle exit 112. The pedestrian passage 121 is arranged to facilitate the diversion of pedestrians and vehicles and to ensure the safety of drivers and passengers.
As shown in fig. 1, in some embodiments, the vehicle inspection system may further include a bag inspection device 181 and/or a personnel inspection device 182, the bag inspection device 181 and/or the personnel inspection device 182 disposed on the pedestrian walkway 121 and configured to inspect personnel and bags passing through the pedestrian walkway 121. The device can realize the simultaneous checking of vehicles, people, certificates and bags, and improve the safety.
In addition, as shown in fig. 1, the vehicle inspection yard 110 further includes a manual inspection waiting area 115, and when the scanning result indicates that the vehicle to be inspected is suspected of being safe, the control device 174 is further configured to dispatch the vehicle to be inspected, which is carried by the on-site transportation device 141 after the radiation inspection, to enter the manual inspection waiting area 115 to wait before the vehicle to be inspected, which is carried by the on-site transportation device 141 after the radiation inspection, reaches the target position in the case that the manual inspection area 114 is full of vehicles to be inspected.
As shown in fig. 1, the manual inspection waiting area 115 is located between the radiation inspection area 113 and the manual inspection area 114. In fig. 1, the vehicle inspection field 110 is a square inspection field including a first side (upper side in fig. 1) and a second side (lower side in fig. 1) that are oppositely disposed, and a third side (left side in fig. 1) and a fourth side (right side in fig. 1) that are oppositely disposed. The radiation inspection zone 113 is located in the middle of a first side of the vehicle inspection field 110. The artificial interrogation zone 114 is located in the middle of a second side opposite the radiation inspection zone 113. The inspection waiting area 115 is located in the middle of the vehicle inspection lot 110. This arrangement allows the radiation inspection area and the manual inspection area to be separated from each other, and the inspection personnel is far from the radiation inspection device 131 and does not interfere with the movement of the on-site transportation device 141, which is beneficial to ensuring personnel safety and the on-site transportation device 141 moves smoothly.
In some embodiments, as shown in FIG. 1, the vehicle inspection system further includes a charging device 191, the charging device 191 disposed within the vehicle inspection yard 110 configured to charge the in-yard transportation device 141. In the embodiment shown in fig. 1, the charging device 191 includes a total of three charging posts. The number of charging poles can be configured according to the needs of the on-site transportation device 141. In this embodiment, fill electric pile and dispose respectively in the outside of each scanning device roughly with bundle of rays corresponding position, this configuration position does benefit to the automated guidance transport vechicle and charges nearby, improves the work efficiency of automated guidance transport vechicle to improve vehicle inspection system's whole work efficiency.
In some embodiments, as shown in fig. 1, the vehicle inspection system further includes a power distribution control room 161, the power distribution control room 161 being disposed within the vehicle inspection yard 110 and configured to provide power to the electrical devices of the vehicle inspection system. In fig. 1, the power distribution control room 161 is disposed at one corner of the vehicle inspection site 110 at one end of the manual inspection area 114, and this configuration facilitates isolation of operations and maintenance personnel from the radiation inspection work, thereby facilitating smooth vehicle inspection work and ensuring personnel safety.
In some embodiments, as shown in fig. 1, the vehicle inspection system further comprises a monitoring room 171, the monitoring room 171 is disposed in the vehicle inspection field 110, and a display 172 for displaying a scanned image of a vehicle to be inspected and a human-machine interaction device 173 in signal connection with a control device 174 are disposed in the monitoring room 171. In fig. 1, the monitoring room 171 is disposed at one corner of the vehicle inspection site 110 at the other end of the manual inspection area 114 opposite to the power distribution control room 161, and this configuration facilitates isolation of activities of inspection, operation and maintenance personnel from the radiation inspection work, thereby facilitating smooth performance of the vehicle inspection work and ensuring safety of personnel.
In addition, the vehicle inspection system may further include a monitoring system for monitoring whether a person enters the vehicle inspection lot 110, the monitoring system including a monitoring camera, a CCTV monitoring device 175, and an alarm. CCTV monitoring equipment 175 is disposed within monitoring room 171.
In some embodiments, as shown in fig. 1, vehicle inspection yard 110 further includes an equipment servicing area 151 for servicing the radiation inspection device 131 and/or the on-board transport device 141. The equipment maintenance area 151 is provided to facilitate timely maintenance of the radiation inspection device 131 or the on-site transportation device 141, which requires maintenance or is problematic, and also to facilitate smooth performance of the vehicle inspection operation by the normal radiation inspection device 131 or the on-site transportation device 141. The equipment maintenance area 151 includes two maintenance sites provided on the third side and the fourth side of the vehicle inspection site, respectively. Two maintenance sites are respectively adjacent to the power distribution control room 161 and the monitoring room 171 and are relatively separated from the radiation inspection area 113, the manual inspection area 114, the manual inspection waiting area 115 and the activity area of the in-site transportation device 141.
In addition, a standby scanning device and an automated guided vehicle may be placed in the device repair area 151, and the standby scanning device and the automated guided vehicle may be activated to participate in vehicle inspection work when the operating scanning device or the automated guided vehicle malfunctions or needs maintenance.
In some embodiments, as shown in FIG. 1, vehicle inspection lot 110 includes a plurality of vehicle entrances 111 arranged side-by-side and a plurality of vehicle exits 112 arranged side-by-side. The arrangement is beneficial to improving the passing rate of the inspected vehicle and improving the inspection efficiency of the vehicle inspection system.
In some embodiments, as shown in FIG. 1, a vehicle entrance 111 and a vehicle exit 112 are disposed at opposite ends of the vehicle inspection field 110, respectively, and a radiation inspection zone 113 is located between the vehicle entrance 111 and the vehicle exit 112. This configuration facilitates improving the inspection efficiency of radiation inspection, thereby improving the inspection efficiency of the vehicle inspection system.
In some embodiments, as shown in FIG. 1, the vehicle inspection yard 110 further includes an entrance parking interchange area 116 located inboard of the vehicle entrance 111 and an exit pickup interchange area 117 located inboard of the vehicle exit 112. The arrangement of the entrance parking exchange area 116 and the exit vehicle taking exchange area 117 is beneficial to uniformly allocating vehicle inspection resources and improving the inspection efficiency of the vehicle inspection system.
A vehicle inspection system according to an embodiment of the present disclosure is described in more detail below with reference to fig. 1.
In the embodiment shown in fig. 1, the vehicle inspection system integrates the parking intelligent exchange station, the radiation inspection device 131, the in-field transportation device 141, the suspected vehicle manual inspection and the people and certificate luggage inspection equipment, and realizes a full-aperture large-area safety inspection system for people, objects, certificates and vehicles.
The radiation inspection apparatus 131 comprises three scanning devices, each comprising a radiation source and a detector and a plate chain conveyor device. The on-site transport device 141 includes six automated guided vehicles, and one scanning apparatus is equipped with two automated guided vehicles for auxiliary transport when performing radiation inspection.
In the embodiment shown in fig. 1, the vehicle inspection yard 110 is a square inspection yard, and zebra crossings are arranged around the inspection yard and can be used as sidewalks. In fig. 1, a plurality of vehicle entrances 111 of the vehicle inspection yard 110 are provided corresponding to a plurality of parking spaces a to J provided in the entrance parking interchange area 116, and a plurality of vehicle exits 112 of the vehicle inspection yard 110 are provided corresponding to a plurality of parking spaces a to J provided in the exit pick-up and interchange area 117.
In fig. 1, S to S2 are device inlet ports of three scanning devices, respectively, and R to R2 are device outlet ports of three scanning devices, respectively. The scanning device may comprise a top view or multi-view scanning device. The scanning device may be a fluoroscopy device or a backscatter scanning device. The inspection area 114 is provided with a plurality of inspection stations C1-C6. The manual checking station is configured with a worker to complete manual hand checking of the suspected vehicle, and the manual hand checking result can be interconnected with information of monitoring equipment of the monitoring room 171, such as the display 172, the human-computer interaction device 173, the control device 174, and the like. Fill electric pile and set up near scanning equipment, fill electric pile and provide electric power for the automated guidance transport vechicle, the automated guidance transport vechicle is according to control system's instruction motion to filling the electric pile side and charging.
The manual inspection waiting area 115 is provided with a plurality of parking spaces C20 to C27 and C30 to C37, and the manual inspection waiting area 115 can be used as a suspected vehicle inspection area when the manual inspection area 114 is full of vehicles. In addition, the manual inspection waiting area 115 may temporarily stop the vehicle to be inspected at the transit in the case where the vehicle being inspected is full at the exit pick-up and exchange area 117 or the radiation inspection device 131.
In fig. 1, the equipment maintenance area 151 includes two maintenance yards RP1 and RP2, and the equipment maintenance area 151 can be used as a maintenance place for an automated guided vehicle and a scanning apparatus. An isolation device is provided between the equipment maintenance area 151 and the movement area of the automated guided transport vehicle. When the automated guided vehicle and the scanning device cannot work normally, they are transported to the device maintenance area 151, and maintenance work can be performed while the remaining automated guided vehicles and the scanning device continue to work normally.
The distribution control room 161 is located at one end of the inspection area 114, and has a distribution control device 162 therein for uniformly distributing power to the electric devices of the vehicle inspection system, such as the scanning device, the charging pile, the display device 172, and the control device 174.
The monitoring room 171 is provided in the vehicle inspection area 110 at the other end of the artificial inspection area 114. A display 172 for displaying a scanned image of the vehicle to be inspected and a human-machine interaction device 173 in signal connection with a control device 174 are provided in the monitoring room 171. A monitoring person may be configured to manually monitor the scanned image displayed on the display 172, determine a suspected vehicle according to the monitoring result, and send information related to the suspected vehicle to the control device 174 through the human-computer interaction device 173, so that the control device 174 controls the target position of the corresponding automated guided vehicle carrying the suspected vehicle.
The automated guided vehicle can integrate various navigation modes, such as laser, video, differential GPS, magnetic navigation and the like, so as to realize automatic navigation. The specific deployment quantity and the main working area of the automatic guided transporting vehicle can be specifically deployed according to actual needs, and the control device can send instructions to the automatic guided transporting vehicle according to actual field needs.
In some embodiments, the control device 174 may also control the scanning apparatus, such as controlling the radiation source to turn on or off according to the relative position of the automated guided vehicle and the scanning apparatus, so as to orchestrate the operation of the various devices of the vehicle scanning system. Of course, the scanning device may also be controlled separately by a controller separate from the control means 174.
In the above embodiments, the control device may be implemented as a general-purpose Processor, a Programmable Logic Controller (PLC), a Digital Signal Processor (DSP), an Application Specific Integrated Circuit (ASIC), a Field Programmable Gate Array (FPGA) or other Programmable Logic device, a discrete Gate or transistor Logic device, a discrete hardware component, or any suitable combination thereof for performing the functions described in the present disclosure.
The operation of the vehicle inspection system will be described with reference to fig. 1 and 2. As shown in fig. 1 and 2, after the entrance parking interchange 116 is ready, the driver merely stops the vehicle to be inspected to the parking space of the entrance parking interchange 116 at the vehicle entrance 111 as in the smart parking lot and performs information guidance confirmation, and then the driver enters the pedestrian passageway 121 (security inspection passageway) to perform the verification of the witness pack. The intelligent guiding unit may push the ping information to the driver. The driver then drives his vehicle away at an exit pick-up area 117 at a designated location near the vehicle exit 112 of the vehicle inspection station 110. In the vehicle inspection yard 110, the control device 174 is used as an automatic guided vehicle dispatching unit to receive tasks, a vehicle to be inspected, such as a passenger vehicle, is transported to an idle scanning device by the automatic guided vehicle for radiation inspection, whether the vehicle to be inspected is suspected or not is determined according to an image result of the scanning device, if the vehicle to be inspected is not suspected, the automatic guided vehicle is dispatched by the control device 174 to transport the vehicle to be inspected after radiation inspection to the exit vehicle taking exchange area 117 and the vehicle exit 112, and if the vehicle to be inspected is suspected, the automatic guided vehicle is dispatched to transport the vehicle to be inspected to the manual inspection area 114 for continuous manual inspection. If the manual inspection result indicates that the vehicle to be inspected has no problem, the automated guided vehicle sends it to the exit pick-up exchange area 117 and the vehicle exit 112, and if the manual inspection result indicates that the vehicle to be inspected has a problem, it waits for further processing. Besides manual inspection and monitoring, the whole inspection process is free of manual participation, the process is more intelligent and automatic, and the inspection passing rate is improved.
Wherein the artificial inspection area 114 may be divided into a plurality of inspection spaces independent from each other by a partition means to ensure the privacy of the vehicle to be inspected.
The following describes, with reference to fig. 3 to 8, the structure, the operating principle, and the scanning flow of the radiation inspection performed on the vehicle to be inspected when the automated guided vehicle and the scanning device are cooperated in the vehicle inspection system according to an embodiment of the present disclosure. The automated guided vehicle and scanning apparatus of the vehicle inspection system of the embodiment of the present disclosure will be described therein by taking an X-ray radiation inspection of a small passenger vehicle to be inspected as an example. It should be understood by those skilled in the art that the following description is merely exemplary, and the automated guided vehicle and scanning apparatus of the vehicle inspection system of the present disclosure is not limited thereto.
The scanning device comprises a scanning device 5 and a plate link conveyor 3. The scanning device 5 comprises a radiation source and a detector. The area scanned by the radiation beam emitted by the radiation source is the scanning area. Rays of the radiation beam after being transmitted through the vehicle to be inspected and/or reflected by the vehicle to be inspected are received by the detector, and a scanning image of the vehicle to be inspected can be formed according to optical signals of the rays received by the detector. The plate link conveyor 3 serves as a vehicle conveyor of the scanning device for conveying the vehicle to be examined through a scanning zone 4 of a scanning device 5. At least one automated guided vehicle 2 is used to transport the vehicle 1 to be examined from an initial position onto the plate link conveyor 3 or from the plate link conveyor 3 to a pick-up position. In some embodiments, the automated guided vehicle is a portal automated guided vehicle. The number of the automated guided vehicles used in cooperation with one scanning apparatus may be one or more, and the scanning process shown in fig. 3 is described by taking an example in which one plate link conveyor 3 and two automated guided vehicles 2 are used in cooperation. The automated guided vehicle 2 is equipped with an electromagnetic or optical automated guiding device, can travel along a predetermined guide path, and has various transfer functions as safety protection.
As shown in fig. 3, each flow is described as follows:
in procedure one, the vehicle 1 to be examined is parked in an initial position, for example a parking space of the entrance parking interchange area 116, which is remote from the scanning area 4 of the scanning device, so that, for example, X-rays or the like in the scanning area 4 do not pose a safety threat to the driver.
In the second flow, the automated guided vehicle 2 (first automated guided vehicle) travels to the parking position of the vehicle 1 to be inspected, raises the position of the vehicle 1 to be inspected, lifts the vehicle 1 to be inspected, and travels toward the plate link conveyor 3.
In the third flow, the automated guided vehicle 2 transports the vehicle 1 to be inspected onto the plate link conveyor 3, lowers the position of the vehicle 1 to be inspected, and places the vehicle 1 to be inspected on the plate link conveyor 3.
In the fourth process, the transport carriage 2 is automatically guided away from the plate link conveyor 3, while the plate link conveyor 3 conveys the vehicle 1 to be examined through the scanning zone 4.
In the fifth process, the automated guided transport vehicle 2 travels to another vehicle to be inspected, and the vehicle to be inspected, on which the radiation inspection has been completed, is conveyed to the exit end of the plate link conveyor 3.
In the sixth process, the vehicle 1 to be inspected, on which the radiation inspection has been completed, is lifted by another automated guided vehicle 2 (second automated guided vehicle).
In the seventh flow, the vehicle 1 to be inspected, on which the radiation inspection has been completed, is transported to the target position by the second automated guided transporting carriage 2.
The eighth and ninth processes sequentially carry out the conveyance and inspection of the other vehicles 1 to be inspected.
According to the exemplary embodiment shown in fig. 3, a plate link conveyor 3 is used to transport the vehicle 1 to be examined through a scanning zone 4 of a scanning device 5, and an automatic guided vehicle 2 is used to transport the vehicle 1 to be examined from an initial position onto the plate link conveyor 3 or from the plate link conveyor 3 to a pick-up position, the transport of the vehicle to be examined being carried out during the examination process by the plate link conveyor 3 and the automatic guided vehicle 2.
In some embodiments, the automated guided vehicle 2 is a portal automated guided vehicle, which can ensure the stability of the vehicle to be inspected during transportation.
As shown in fig. 4, the automatic guided vehicle 2 on the left side of the plate link conveyor 3, after lifting up and advancing the vehicle to be inspected to the plate link conveyor 3, the automatic guided vehicle 2 straddles the plate link conveyor 3, and then the vehicle to be inspected is placed on the plate link conveyor 3 and then is driven off the plate link conveyor 3. After the inspection of the vehicle to be inspected is completed, the automated guided vehicle 2 on the right side of the plate link conveyor 3 lifts the vehicle to be inspected from the plate link conveyor 3 and then conveys the vehicle to be inspected away from the plate link conveyor 3. According to an embodiment of the disclosure, a positioning module may be provided for positioning the automated guided transport vehicle 2 relative to the plate link conveyor 3. The positioning module may be provided on the scanning device 5, the plate link conveyor 3, the automated guided vehicle 2 and/or the ground.
As shown in fig. 5, the plate link conveyor 3 includes an input portion, a detection section, and an output portion, which are sequentially connected, the detection section being located between the input portion and the output portion, the input portion being located on the left side of fig. 5, and the output portion being located on the right side of fig. 5. Wherein the inspection section employs an unpowered roller, the input section is used to input the vehicle 1 to be inspected onto the inspection section, the vehicle to be inspected proceeds forward through the unpowered roller of the inspection section, and the output section is used to output the vehicle 1 to be inspected from the inspection section. The input part comprises two sub-conveyors arranged in parallel, each sub-conveyor comprises a motor 31, a speed reducer 32, a transmission shaft 33, a chain wheel 34 and a chain plate 35, the motor 31 provides power for the sub-conveyors, and the rotation of the motor 31 is transmitted to the transmission shaft 33 through the speed reducer 32 to drive the chain plate 35 to move along a conveying path. Illustratively, the number of right or left motors may be 1 or two. Likewise, the output section comprises two sub-conveyors arranged in parallel, each sub-conveyor comprising a motor, a reducer, a transmission shaft, a sprocket and a link plate.
As shown in fig. 6, the automated guided transporting carriage 2 includes a door frame 21, an actuating portion 22, traveling wheels 23, and a yoke bracket 24, wherein the door frame 21 is configured to cover the vehicle 1 to be inspected from above, including a horizontal portion above the vehicle 1 to be inspected and two side portions on the sides of the vehicle 1 to be inspected. The two side portions are each substantially triangular as viewed from the side of the vehicle 1 to be inspected. Wherein the yoke bracket 24 is used to lift the vehicle 1 to be inspected off the ground, the actuating part 22 is used to actuate the yoke bracket 24, and the travelling wheels 23 are used to travel or steer the automated guided transporting vehicle 2 along the ground.
Wherein the control device is used for controlling the operation of the automated guided vehicle 2. The automated guided vehicle 2 may further include a distance sensor and an image acquisition device, wherein data measured by the distance sensor and an image acquired by the image acquisition device are transmitted to the control device, and the control device determines the position of the automated guided vehicle 2 according to the data measured by the distance sensor and the image acquired by the image acquisition device, and plans the traveling route of the automated guided vehicle 2.
According to an embodiment of the present disclosure, the automated guided vehicle 2 further includes a weight sensor for measuring the weight of the vehicle 1 to be inspected, and the control device may determine whether the automated guided vehicle is empty according to the measurement result of the weight sensor.
According to an embodiment of the present disclosure, the automated guided vehicle 2 includes an anti-collision module that stops the automated guided vehicle 2 and issues an alarm when an obstacle is detected on a walking route of the automated guided vehicle 2.
The vehicle inspection system of the embodiment of the disclosure adopts a portal frame type automatic guide transport vehicle and a plate link chain conveying device to combine to convey a vehicle to be inspected, and the basic operation modes are as follows: the driver only needs to park the vehicle to be inspected in the parking space of the entrance parking exchange area and leave after locking the vehicle, the vehicle inspection system can automatically identify the vehicle to be inspected and the vehicle type, the portal frame type automatic guide transport vehicle receives the vehicle in the parking entrance exchange area according to the operation instruction given by the control device, the transportation of the vehicle to be inspected is automatically and flexibly completed, when the vehicle is transported to the uploading point of the plate chain transport device of the scanning device, the portal frame type automatic guide transport vehicle drives away to carry out the next transportation process, the plate chain transport device starts to operate and transport the vehicle to be inspected to move forward to complete the scanning of the vehicle to be inspected, after the inspection of the vehicle to be inspected is completed, the portal frame type automatic guide transport vehicle extracts the vehicle to be inspected from the downloading point of the plate chain transport device and transports the vehicle to the target position, such as the parking space of the exit vehicle taking exchange area or the parking space of the manual inspection area 114, for the vehicle without suspicion, the driver removes the vehicle to be inspected at the exit pick-up exchange area 117. For suspect vehicles, the gantry type automated guided vehicle extracts the vehicle to be inspected from the plate chain conveyor drop-off point and transports the vehicle to the manual inspection area 114 for further manual inspection.
The conveying mode combining the automatic guide transport vehicle and the plate chain conveying device has the characteristics of intellectualization, automation, flexibility and the like, is flexible to apply, and is suitable for safety inspection of small-sized passenger vehicles to be inspected in places with large vehicle flow, such as land ports, roll-on ferrys, public security inspection stations, large parking lots and the like.
In addition, the combined conveying mode has high technical content, is applied to a wider occasion of a safety inspection system, expands the conveying form of the vehicle to be inspected, improves the detection efficiency, has quick action of the automatic guided transport vehicle and quick and accurate positioning, and reduces the waiting time of multiple automatic continuous operations; safety accidents are reduced, no random errors of manual operation exist, and the automatic guided vehicle has multiple safety protections; the labor cost is reduced, the operation and command of personnel are not needed, and the automatic guided transport vehicle can automatically run according to a program; the on-site order is standardized, the automatic guided transport vehicles sequentially run along the designated path, and the automatic guided transport vehicles are tidy and unified, have clear rhythm and are free from messiness; the whole operation is automatic, intelligent and informationized, and the technological degree is high.
The operation principle and operation of the radiation inspection system are described in the above embodiments only by way of example in which the on-site handling equipment includes a plurality of automated guided vehicles, and in some embodiments not shown, the on-site transport apparatus may also include other types of handling equipment, such as RGVs, conveyor belts, and the like.
In summary, the vehicle inspection system of the embodiment of the present disclosure has at least one of the following advantages: the function is comprehensive, and suspect vehicle handles and does not occupy the parking stall of getting the car of suspect vehicle, and the percent of pass is high, can carry out nimble design according to actual place size and percent of pass needs. Each scanning device can be provided with a plurality of automatic guide transport vehicles to work cooperatively through the control device, and the scanning devices are fully utilized to realize efficient inspection. The centralized parking, manual inspection/maintenance, power distribution and pedestrian passage of the vehicle are increased reasonably, the influence of radiation on drivers, passengers and workers is reduced, and the safety and reliability of the system are improved. The method can be applied to roll-on ferry, port, intelligent parking lot, highway inspection station and the like.
Finally, it should be noted that: the above examples are intended only to illustrate the technical solutions of the present disclosure and not to limit them; although the present disclosure has been described in detail with reference to preferred embodiments, those of ordinary skill in the art will understand that: modifications to the embodiments of the present disclosure or equivalent substitutions for parts of the technical features can be made, which are intended to be covered by the technical scope of the present disclosure.
Claims (14)
1. A vehicle inspection system, comprising:
a vehicle inspection area (110) comprising a vehicle entrance (111), a radiation inspection area (113), a manual inspection area (114) and a vehicle exit (112);
a radiation inspection device (131) arranged in the radiation inspection area (113) and configured to perform radiation inspection on a vehicle to be inspected entering the radiation inspection area (113);
an on-site transport device (141) for receiving a vehicle to be inspected from the vehicle entrance (111) and transporting the vehicle to be inspected to the radiation inspection device (131), and carrying the vehicle to be inspected after radiation inspection to a target position;
and the control device (174) is in signal connection with the in-field transportation device (141) and is configured to schedule the vehicle to be inspected, which carries the radiation inspection, of the in-field transportation device (141) to reach the target position according to the scanning result of the radiation inspection device (131), wherein the vehicle outlet (112) is used as the target position when the vehicle to be inspected is not in a safety suspicion, and the manual inspection area (114) is used as the target position when the vehicle to be inspected is in a safety suspicion.
2. The vehicle inspection system of claim 1, wherein the radiation inspection apparatus (131) comprises a plurality of scanning devices.
3. The vehicle inspection system of claim 1, wherein the on-board transport device (141) comprises a plurality of automated guided vehicles.
4. The vehicle inspection system of claim 1, comprising a pedestrian passageway (121), the pedestrian passageway (121) being disposed outside the vehicle inspection yard (110) communicating the vehicle entrance (111) and the vehicle exit (112).
5. A vehicle inspection system according to claim 4, further comprising a bag inspection device (181) and/or a personnel inspection device (182), the bag inspection device (181) and/or personnel inspection device (182) being arranged on the pedestrian walkway (121) configured to inspect personnel and bags passing through the pedestrian walkway (121).
6. The vehicle inspection system of claim 1, wherein the vehicle inspection yard (110) further comprises a manual inspection waiting area (115), and when the scanning result indicates that the vehicle to be inspected is suspected of being safe, the control device (174) is further configured to schedule the vehicle to be inspected, which is subjected to the radiation inspection, carried by the on-site transportation device (141) to enter the manual inspection waiting area (115) to wait before the vehicle to be inspected, which is subjected to the radiation inspection, carried by the on-site transportation device (141) reaches the target position in the case that the manual inspection area (114) is full of vehicles to be inspected.
7. The vehicle inspection system of claim 6, wherein the artificial ping wait area (115) is located between the radiation inspection area (113) and the artificial ping area (114).
8. The vehicle inspection system of claim 1, further comprising a charging device (191), the charging device (191) disposed within the vehicle inspection yard (110) configured to charge the in-yard transportation device (141).
9. The vehicle inspection system of claim 1, further comprising a power distribution control room (161), the power distribution control room (161) disposed within the vehicle inspection yard (110) configured to provision power to electrical devices of the vehicle inspection system.
10. The vehicle inspection system of claim 1, further comprising a monitoring room (171), wherein the monitoring room (171) is disposed in the vehicle inspection yard (110), and a display (172) for displaying a scanned image of the vehicle to be inspected and a human-machine interaction device (173) in signal connection with the control device (174) are disposed in the monitoring room (171).
11. The vehicle inspection system of claim 1, wherein the vehicle inspection yard (110) further comprises an equipment maintenance area (151) for servicing the radiation inspection device (131) and/or the on-board transport device (141).
12. The vehicle inspection system of claim 1, wherein the vehicle inspection yard (110) includes a plurality of side-by-side vehicle entrances (111) and a plurality of side-by-side vehicle exits (112).
13. The vehicle inspection system of claim 1, wherein the vehicle entrance (111) and the vehicle exit (112) are disposed at opposite ends of the vehicle inspection field (110), respectively, and the radiation inspection zone (113) is located between the vehicle entrance (111) and the vehicle exit (112).
14. The vehicle inspection system of claim 1, wherein the vehicle inspection yard (110) further includes an entrance parking interchange area (116) disposed inboard of the vehicle entrance (111) and an exit pick-up interchange area (117) disposed inboard of the vehicle exit (112).
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011641915.2A CN114764072A (en) | 2020-12-31 | 2020-12-31 | Vehicle inspection system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011641915.2A CN114764072A (en) | 2020-12-31 | 2020-12-31 | Vehicle inspection system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114764072A true CN114764072A (en) | 2022-07-19 |
Family
ID=82362881
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011641915.2A Pending CN114764072A (en) | 2020-12-31 | 2020-12-31 | Vehicle inspection system |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114764072A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117852991A (en) * | 2024-03-07 | 2024-04-09 | 江苏五城星耀网络科技有限公司 | Chemical intelligent logistics data processing method and system |
Citations (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060170768A1 (en) * | 2005-01-31 | 2006-08-03 | Riley Larry E | Mobile under vehicle inspection system |
| CN200990716Y (en) * | 2006-10-13 | 2007-12-12 | 清华同方威视技术股份有限公司 | Control unit and radiation inspection system for radiation source |
| CN101231253A (en) * | 2007-01-22 | 2008-07-30 | 同方威视技术股份有限公司 | Active and passive combination scanning method and device |
| CN102147486A (en) * | 2006-10-13 | 2011-08-10 | 同方威视技术股份有限公司 | Control unit for radiation source, control method, radiation checking system and radiation checking method |
| CN105809655A (en) * | 2014-12-30 | 2016-07-27 | 清华大学 | Vehicle checking method and system |
| CN206020304U (en) * | 2016-08-31 | 2017-03-15 | 同方威视技术股份有限公司 | Packaged type commodity inspection system |
| CN106950232A (en) * | 2017-04-12 | 2017-07-14 | 北京君和信达科技有限公司 | Radiation testing method and radiation checking system |
| CN206468073U (en) * | 2016-12-29 | 2017-09-05 | 同方威视技术股份有限公司 | Automotive vehicle inspection system and intelligent garage |
| CN108398444A (en) * | 2018-05-09 | 2018-08-14 | 清华大学 | Radiation checking system and radiation testing method |
| CN108761555A (en) * | 2018-05-25 | 2018-11-06 | 清华大学 | Container vehicle checks system and container vehicle inspection method |
| CN208283313U (en) * | 2018-05-09 | 2018-12-25 | 清华大学 | Radiation checking system |
| CN109407163A (en) * | 2019-01-04 | 2019-03-01 | 清华大学 | Radiation checking system and radiation testing method |
| CN109580675A (en) * | 2018-12-07 | 2019-04-05 | 苏州曼德克光电有限公司 | It is a kind of for preventing vehicle image checking from causing the device and method of traffic congestion |
| CN110282384A (en) * | 2019-06-27 | 2019-09-27 | 北京埃索特核电子机械有限公司 | A kind of passenger car based on vehicle conveying robot fast and safely checks system |
| CN209496150U (en) * | 2018-12-28 | 2019-10-15 | 中国原子能科学研究院 | Wrap up detection device |
| WO2020156438A1 (en) * | 2019-02-03 | 2020-08-06 | 同方威视技术股份有限公司 | Vehicle safety inspection system and inspection method |
-
2020
- 2020-12-31 CN CN202011641915.2A patent/CN114764072A/en active Pending
Patent Citations (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060170768A1 (en) * | 2005-01-31 | 2006-08-03 | Riley Larry E | Mobile under vehicle inspection system |
| CN200990716Y (en) * | 2006-10-13 | 2007-12-12 | 清华同方威视技术股份有限公司 | Control unit and radiation inspection system for radiation source |
| CN102147486A (en) * | 2006-10-13 | 2011-08-10 | 同方威视技术股份有限公司 | Control unit for radiation source, control method, radiation checking system and radiation checking method |
| CN101231253A (en) * | 2007-01-22 | 2008-07-30 | 同方威视技术股份有限公司 | Active and passive combination scanning method and device |
| CN105809655A (en) * | 2014-12-30 | 2016-07-27 | 清华大学 | Vehicle checking method and system |
| US20170017667A1 (en) * | 2014-12-30 | 2017-01-19 | Tsinghua University | Vehicle inspection methods and systems |
| CN206020304U (en) * | 2016-08-31 | 2017-03-15 | 同方威视技术股份有限公司 | Packaged type commodity inspection system |
| CN206468073U (en) * | 2016-12-29 | 2017-09-05 | 同方威视技术股份有限公司 | Automotive vehicle inspection system and intelligent garage |
| CN106950232A (en) * | 2017-04-12 | 2017-07-14 | 北京君和信达科技有限公司 | Radiation testing method and radiation checking system |
| CN108398444A (en) * | 2018-05-09 | 2018-08-14 | 清华大学 | Radiation checking system and radiation testing method |
| CN208283313U (en) * | 2018-05-09 | 2018-12-25 | 清华大学 | Radiation checking system |
| CN108761555A (en) * | 2018-05-25 | 2018-11-06 | 清华大学 | Container vehicle checks system and container vehicle inspection method |
| CN109580675A (en) * | 2018-12-07 | 2019-04-05 | 苏州曼德克光电有限公司 | It is a kind of for preventing vehicle image checking from causing the device and method of traffic congestion |
| CN209496150U (en) * | 2018-12-28 | 2019-10-15 | 中国原子能科学研究院 | Wrap up detection device |
| CN109407163A (en) * | 2019-01-04 | 2019-03-01 | 清华大学 | Radiation checking system and radiation testing method |
| WO2020156438A1 (en) * | 2019-02-03 | 2020-08-06 | 同方威视技术股份有限公司 | Vehicle safety inspection system and inspection method |
| CN110282384A (en) * | 2019-06-27 | 2019-09-27 | 北京埃索特核电子机械有限公司 | A kind of passenger car based on vehicle conveying robot fast and safely checks system |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117852991A (en) * | 2024-03-07 | 2024-04-09 | 江苏五城星耀网络科技有限公司 | Chemical intelligent logistics data processing method and system |
| CN117852991B (en) * | 2024-03-07 | 2024-05-03 | 江苏五城星耀网络科技有限公司 | Chemical intelligent logistics data processing method and system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106541880A (en) | A kind of Intelligent transportation device | |
| CN104331077B (en) | Automatical pilot transportation vehicle | |
| CN109146361A (en) | A kind of unmanned goods stock of wisdom formula, shared system and business model | |
| US20220024603A1 (en) | Self-Propelled Airside Dolly, Baggage Handling System, Baggage Handling Facility, and Related Apparatus and Methods | |
| CN109131925A (en) | A kind of unmanned plane place duty luggage traffic vehicle and business model | |
| CN110282384A (en) | A kind of passenger car based on vehicle conveying robot fast and safely checks system | |
| AU2021233979A1 (en) | Baggage and parcel handling system | |
| CN106586439A (en) | Intelligent aerial rail loading car transmission system | |
| CN107480932A (en) | A kind of intercity intelligent logistics system | |
| CN107491926A (en) | A kind of Urban Logistics System based on pipe network | |
| CN114648434A (en) | Transportation control method, system, device, electronic apparatus, transportation vehicle, and medium | |
| CN110852670A (en) | Terminal intelligent co-distribution system combined with urban underground loop | |
| CN114764072A (en) | Vehicle inspection system | |
| CN206975700U (en) | A kind of system and building of automatic transceiving parcel | |
| CN107578209A (en) | A kind of intercity logistics transportation method | |
| CN107555109A (en) | A kind of tree-shaped track for tubular type logistics system | |
| CN207216680U (en) | A kind of intercity intelligent logistics system | |
| CN108016528B (en) | Automatic guiding vehicle | |
| CN110758407B (en) | Station inbound system based on transfer island | |
| KR102183377B1 (en) | Vertical conveyor for agv, vertical conveyor system for agv, vertical conveyor for pallet and vertical conveyor system for pallet | |
| CN114684541A (en) | Vehicle transport system for safety check | |
| CN110203214A (en) | A kind of intelligent transport system and its working method | |
| JP6788760B1 (en) | Transportation method | |
| CN114764073B (en) | Vehicle radiation inspection device and vehicle radiation inspection system | |
| CN206049662U (en) | A kind of rail traffic platform |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |