USRE49258E1 - Vehicle control - Google Patents
Vehicle control Download PDFInfo
- Publication number
- USRE49258E1 USRE49258E1 US15/949,385 US201815949385A USRE49258E US RE49258 E1 USRE49258 E1 US RE49258E1 US 201815949385 A US201815949385 A US 201815949385A US RE49258 E USRE49258 E US RE49258E
- Authority
- US
- United States
- Prior art keywords
- vehicle
- driving
- mode
- modes
- subsystem
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime, expires
Links
- 239000000725 suspension Substances 0.000 claims abstract description 65
- 230000005540 biological transmission Effects 0.000 claims abstract description 59
- 230000006870 function Effects 0.000 claims abstract description 39
- 239000004576 sand Substances 0.000 claims description 31
- 230000004044 response Effects 0.000 claims description 26
- 239000011435 rock Substances 0.000 claims description 24
- 244000025254 Cannabis sativa Species 0.000 claims description 22
- 238000000034 method Methods 0.000 claims description 7
- 238000001514 detection method Methods 0.000 claims description 3
- 230000004043 responsiveness Effects 0.000 claims description 3
- 238000004590 computer program Methods 0.000 claims 1
- 239000011499 joint compound Substances 0.000 claims 1
- 230000008859 change Effects 0.000 description 12
- 230000035945 sensitivity Effects 0.000 description 9
- 238000004132 cross linking Methods 0.000 description 8
- 238000013016 damping Methods 0.000 description 8
- 230000001133 acceleration Effects 0.000 description 6
- 230000036316 preload Effects 0.000 description 6
- 238000009987 spinning Methods 0.000 description 6
- 238000006073 displacement reaction Methods 0.000 description 5
- 230000002829 reductive effect Effects 0.000 description 5
- 208000012661 Dyskinesia Diseases 0.000 description 4
- 230000003247 decreasing effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 239000012530 fluid Substances 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 2
- 230000000881 depressing effect Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000000750 progressive effect Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000009194 climbing Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000002401 inhibitory effect Effects 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/182—Selecting between different operative modes, e.g. comfort and performance modes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/0195—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the regulation being combined with other vehicle control systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K28/00—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions
- B60K28/10—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the vehicle
- B60K28/16—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the vehicle responsive to, or preventing, skidding of wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K28/00—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions
- B60K28/10—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the vehicle
- B60K28/16—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the vehicle responsive to, or preventing, skidding of wheels
- B60K28/165—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the vehicle responsive to, or preventing, skidding of wheels acting on elements of the vehicle drive train other than the propulsion unit and brakes, e.g. transmission, clutch, differential
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/58—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration responsive to speed and another condition or to plural speed conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/11—Stepped gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/22—Conjoint control of vehicle sub-units of different type or different function including control of suspension systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/082—Selecting or switching between different modes of propelling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/085—Changing the parameters of the control units, e.g. changing limit values, working points by control input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/20—Manual control or setting means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/85—System Prioritisation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/90—System Controller type
- B60G2800/91—Suspension Control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/90—System Controller type
- B60G2800/92—ABS - Brake Control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/90—System Controller type
- B60G2800/96—ASC - Assisted or power Steering control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/90—System Controller type
- B60G2800/97—Engine Management System [EMS]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K17/00—Arrangement or mounting of transmissions in vehicles
- B60K17/34—Arrangement or mounting of transmissions in vehicles for driving both front and rear wheels, e.g. four wheel drive vehicles
- B60K17/344—Arrangement or mounting of transmissions in vehicles for driving both front and rear wheels, e.g. four wheel drive vehicles having a transfer gear
- B60K17/346—Arrangement or mounting of transmissions in vehicles for driving both front and rear wheels, e.g. four wheel drive vehicles having a transfer gear the transfer gear being a differential gear
- B60K17/3462—Arrangement or mounting of transmissions in vehicles for driving both front and rear wheels, e.g. four wheel drive vehicles having a transfer gear the transfer gear being a differential gear with means for changing distribution of torque between front and rear wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K17/00—Arrangement or mounting of transmissions in vehicles
- B60K17/34—Arrangement or mounting of transmissions in vehicles for driving both front and rear wheels, e.g. four wheel drive vehicles
- B60K17/348—Arrangement or mounting of transmissions in vehicles for driving both front and rear wheels, e.g. four wheel drive vehicles having differential means for driving one set of wheels, e.g. the front, at one speed and the other set, e.g. the rear, at a different speed
- B60K17/35—Arrangement or mounting of transmissions in vehicles for driving both front and rear wheels, e.g. four wheel drive vehicles having differential means for driving one set of wheels, e.g. the front, at one speed and the other set, e.g. the rear, at a different speed including arrangements for suppressing or influencing the power transfer, e.g. viscous clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K23/00—Arrangement or mounting of control devices for vehicle transmissions, or parts thereof, not otherwise provided for
- B60K23/08—Arrangement or mounting of control devices for vehicle transmissions, or parts thereof, not otherwise provided for for changing number of driven wheels, for switching from driving one axle to driving two or more axles
- B60K23/0808—Arrangement or mounting of control devices for vehicle transmissions, or parts thereof, not otherwise provided for for changing number of driven wheels, for switching from driving one axle to driving two or more axles for varying torque distribution between driven axles, e.g. by transfer clutch
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/04—Hill descent control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2220/00—Monitoring, detecting driver behaviour; Signalling thereof; Counteracting thereof
- B60T2220/02—Driver type; Driving style; Driver adaptive features
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2260/00—Interaction of vehicle brake system with other systems
- B60T2260/08—Coordination of integrated systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/0063—Manual parameter input, manual setting means, manual initialising or calibrating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/215—Selection or confirmation of options
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/30—Driving style
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/05—Type of road, e.g. motorways, local streets, paved or unpaved roads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/15—Road slope, i.e. the inclination of a road segment in the longitudinal direction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/35—Road bumpiness, e.g. potholes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2300/00—Determining of new ratio
- F16H2300/14—Selecting a state of operation, e.g. depending on two wheel or four wheel drive mode
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/80—Technologies aiming to reduce greenhouse gasses emissions common to all road transportation technologies
- Y02T10/84—Data processing systems or methods, management, administration
Definitions
- the present invention relates to the control of vehicles, in particular to the coordinated control of a number of subsystems of a vehicle.
- GB2273580 teaches an integrated control system to control and configure vehicle operating subsystems in response to control signals
- drivers often encounter a broad range of surfaces and terrains in both on-road and off-road settings.
- the operating characteristics of such an integrated control system does not provide the driver with the ability to provide direct input regarding the surface terrain in an attempt to better select the appropriate subsystem configuration modes.
- This deficiency results in the less than optimal stability, handling, and safety performance of the vehicle. Therefore, to further expand the performance of motor vehicles including integrated control systems as noted above, there is a need for an integrated control system which will provide improved control of the vehicle on a broad range of surfaces.
- the present invention aims to provide a vehicle control system which can be operated so as to provide improved control of the vehicle on a broader range of surfaces, and in particular in a plurality of different off-road surfaces and terrains such as might be encountered when driving off-road.
- the present invention provides a vehicle control system arranged to control a plurality of vehicle subsystems each of which is operable in a plurality of subsystem configuration modes, wherein the vehicle control system is operable in a plurality of driving modes in each of which it is arranged to select the subsystem configuration modes in a manner suitable for a respective driving surface.
- each of the subsystems is operable in a plurality of subsystem configuration modes and in each of the driving modes the subsystem configuration modes are selected in a manner suitable for driving on the respective surface.
- one of the subsystems comprises a suspension system and said plurality of subsystem configuration modes comprises a plurality of ride heights.
- one of the subsystems comprises a fluid suspension system in which fluid interconnection can be made between suspensions for wheels on opposite sides of the vehicle, and said plurality of subsystem configuration modes provide different levels of said interconnection.
- one of the subsystems comprises a steering system which can provide steering assistance, and said plurality of subsystem configuration modes provides different levels of said steering assistance.
- one of the subsystems comprises a braking system which can provide braking assistance, and said plurality of subsystem configuration modes provides different levels of said braking assistance.
- one of the subsystems comprises a brake control system which can provide an anti-lock function to control wheel slip, and said plurality of subsystem configuration modes allow different levels of said wheel slip.
- one of the subsystems comprises a traction control system which is arranged to control wheel spin, and said plurality of subsystem configuration modes allow different levels of said wheel spin.
- one of the subsystems comprises a yaw control system which is arranged to control vehicle yaw, and said plurality of subsystem configuration modes allow different levels of divergence of said vehicle yaw from an expected yaw.
- one of the subsystems comprises a range change transmission and said subsystem configuration modes include a high range mode and a low range mode of said transmission.
- one of the subsystems comprises a powertrain system which includes a powertrain control means and a throttle pedal, the subsystem configuration modes providing different levels of responsiveness of the powertrain control means to movement of the throttle pedal.
- one of the subsystems comprises a transmission system operable in a plurality of transmission ratios and including a transmission control means arranged to monitor at least one parameter of the vehicle and to select the transmission ratios in response, and wherein the subsystem modes include a plurality of transmission configuration modes in which the transmission ratios are selected differently in response to said at least one parameter.
- one of the subsystems comprises a differential system operable to provide a plurality of levels of differential lock, and the subsystem configuration modes are arranged to provide different levels of said lock.
- the differential system is arranged to control the level of differential lock on the basis of a plurality of inputs, and to respond differently to said inputs in each of the modes.
- the differential may be a center differential, a front differential, or a rear differential.
- one of the subsystems comprises a roll control system arranged to provide roll correction to reduce vehicle roll and the subsystem configuration modes provide different levels of roll correction of the vehicle, at least under some driving conditions.
- one of the subsystems is a speed control system arranged to control the speed of the vehicle when descending a hill.
- the speed control system may be arranged to control the vehicle to different speeds in the different configuration modes.
- the driving modes include an off-road mode in which the subsystems are controlled in a manner suitable for driving on rough terrain and an on-road mode in which the subsystems are controlled in a manner suitable for driving on-road.
- the suspension system is arranged to provide a higher ride height in the off road mode than in the on-road mode.
- a higher level of said interconnection is provided than in the on-road mode.
- the traction control system is arranged to allow less wheel spin in the off-road mode than in the on-road mode.
- the yaw control system is arranged to allow a higher degree of said divergence in the off-road mode than in the on-road mode.
- the range change transmission is operated in the low range.
- the powertrain control means is arranged to provide lower levels of drive torque, for a given throttle pedal position, at least at low levels of throttle pedal depression, than in the on-road mode.
- the differential system is arranged to provide higher levels of differential lock in the off-road mode than in the on-road mode.
- the roll control system is arranged to provide a higher roll stiffness in the on-road mode than in the off-road mode.
- the speed control system is arranged to be switched on in the off-road mode and switched off in the on-road mode.
- the driving modes include at least one low friction mode in which the subsystems are controlled in a manner suitable for driving on low friction surfaces and a high friction mode in which the subsystems are controlled in a manner suitable for driving on high friction surfaces.
- the brake control system allows higher levels of slip in the high friction mode than in the low friction mode.
- the traction control system allows higher levels of wheel spin in the high friction mode than in the low friction mode.
- the braking control system provides a greater level of braking assistance in the high friction mode than in the low friction mode.
- the powertrain control means is arranged to provide lower levels of drive torque, for a given throttle pedal position, at least at low levels of throttle pedal depression, in the low friction mode than in the high friction mode.
- the transmission system is arranged to operate in higher gears for a given value of said at least one parameter in the high friction mode than in the low friction mode.
- the differential system is arranged to provide higher levels of differential lock in the low friction mode than in the high friction mode.
- the high friction mode may comprise a standard or default mode in which the vehicle will operate normally and which is suitable for on-road driving.
- the suspension system is arranged to provide a higher ride height in one of the low friction modes than in the other.
- the suspension system is arranged to provide a higher level of said cross linking in one of the low friction modes than in the other.
- the two low friction modes may comprise a mud mode suitable for traveling through deep mud, and another low friction mode suitable for driving in snow, on grass, or on gravel.
- a plurality of low friction modes one of which may be a grass mode in which the subsystems are controlled in a manner suitable for driving on grass, one of which may be an ice mode in which the subsystems are controlled in a manner suitable for driving in ice, and one of which may be a mud mode in which the subsystems are controlled in a manner suitable for driving on mud.
- one of the modes is a sand mode in which the subsystems are controlled in a manner suitable for driving on sand.
- at least one of the subsystems is arranged, in the sand mode, to allow only relatively low levels of wheel spin when the vehicle is traveling at low speeds so as to avoid the vehicle wheels becoming submerged in sand, but to allow relatively high levels of wheel spin when the vehicle is traveling at higher speeds.
- the powertrain control system is arranged to provide relatively low levels of drive torque for a given throttle pedal position at low vehicle speeds and to provide relatively high levels of drive torque for a given throttle pedal position at higher vehicle speeds.
- the off-road mode may be a rock crawl mode in which the subsystems are controlled in a manner suitable for driving over rocks. Alternatively it may be set up for more general off-road use.
- One of the modes may be a rough-road mode in which the subsystems are controlled in a manner suitable for driving on rough roads, for example for driving at relatively high speeds over rough surfaces.
- At least one of the modes may be a plough surface mode in which the brake control subsystem is arranged to allow a relatively high degree of wheel slip under braking. This is useful, for example on snow or sand, where the build up of matter in front of the wheels under braking can improve braking performance.
- At least one of the modes is an on-road mode in which the subsystems are controlled in a manner suitable for driving on-road.
- one of the modes may be a motorway mode in which the subsystems are controlled in a manner suitable for driving at high speed on a flat road surface, or one of the modes may be a country road mode in which the subsystems are controlled in a manner suitable for driving on country roads.
- the driving modes may be selectable by means of two inputs, one of which is a terrain selection input arranged to influence the mode selected on the basis of the terrain selected, and the other which is a mode of use input arranged to influence the mode selected on the basis of a selected mode of use of the vehicle.
- Each of these inputs may be user-controlled inputs, or may be derived from one or more sensors.
- the mode of use input may be arranged to allow selection between a plurality of driving styles, which may include, for example, a normal style, a sport style, and an economy style.
- the mode of use input may be arranged to allow selection between a plurality of states of the vehicle, for example including a towing state or a loaded state.
- the present invention further provides a vehicle comprising a system according to the invention and said plurality of subsystems.
- FIG. 1 is a diagrammatic representation of a powertrain subsystem of a vehicle according to an embodiment of the invention
- FIG. 2 is a diagrammatic representation of steering and brakes subsystems of the vehicle of FIG. 1 ;
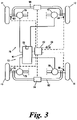
- FIG. 3 is a diagrammatic representation of a suspension subsystem of the vehicle of FIG. 1 ;
- FIG. 4 is a diagrammatic representation of a vehicle mode controller controlling the subsystems of FIGS. 1 to 3 ;
- FIGS. 5 and 6 make up a table showing operation of the vehicle mode controller of FIG. 4 ;
- FIG. 7 is a graph showing throttle characteristics in a second embodiment of the invention.
- FIGS. 8 and 9 are graphs showing control of differentials forming part of the second embodiment
- FIG. 10 is a graph showing traction control characteristics in the second embodiment
- FIG. 11 is a graph showing yaw control characteristics in the second embodiment
- FIG. 12 is a graph showing control of the differentials of the second embodiment
- FIG. 13 shows user inputs forming part of a third embodiment of the invention.
- FIG. 14 is a diagrammatic representation of a powertrain subsystem of a vehicle according to a fourth embodiment of the invention.
- FIG. 15 is a diagrammatic representation of part of a suspension subsystem of the vehicle according to the fourth embodiment of the invention.
- a vehicle 10 has four wheels 11 , 12 , 13 , 14 and a powertrain 16 for providing driving torque to the wheels.
- the powertrain 16 comprises an engine 18 , an automatic transmission 20 which transmits drive torque at any of a number of transmission ratios, via a transfer box 21 to the input side of a center differential 22 .
- Front and rear differentials 24 , 26 receive torque from the center differential 22 and transmit it to the front wheels 11 , 12 and rear wheels 13 , 14 respectively.
- An engine controller 28 in the form of an engine management system controls operation of the engine 18 so as to control its speed and output power and torque in response to inputs from the driver from a throttle pedal 27 , the position of which is measured with a throttle pedal position sensor 29 .
- a transmission controller 30 controls the transmission ratio of the automatic transmission 20 , and the selection of high or low range in the transfer box 21 . It also controls the center differential 22 so as to control the distribution of drive torque between the front and rear axles, and the rear differential 26 so as to control the distribution of drive torque between the two rear wheels 13 , 14 .
- the transmission controller 30 could also control the distribution of drive torque between the front two wheels 13 , 14 .
- the vehicle further comprises a steering system 40 for steering the front wheels 11 , 12 , and a brake system 50 for braking all four wheels 11 , 12 , 13 , and 14 .
- the steering system 40 comprises a steering wheel 41 , a steering column 42 for transmitting steering input torque input by the driver to the steering wheel to pinion 43 of a rack and pinion steering system.
- the pinion 43 transmits the steering torque to a rack 44 , which is connected to steering arms 45 by means of which it applies a steering force to the steering knuckles 46 of the front wheels to steer them.
- a PAS (power assisted steering) motor 47 applies steering forces to the rack 44 to assist the driver in steering the vehicle, under the control of a steering controller 48 which receives inputs from a steering angle sensor 49 , which measures the steering angle of the steering wheel 41 .
- the brake system 50 comprises a brake disk 51 , 52 , 53 , 54 , and a brake caliper 55 , 56 , 57 , 58 for each of the wheels each of which is actuated hydraulically from a hydraulic brake control block 60 .
- the hydraulic control block 60 controls the hydraulic pressure and hence the braking torque at each wheel under the control of a brake controller 62 which receives wheel speed signals from wheels speed sensors 63 , 64 , 65 , 66 at each of the wheels.
- a driver operated brake pedal 67 provides via a master cylinder the driver input to the brake system 50 and creates hydraulic pressure to operate the brakes at a first inlet port 60 a to the control block 60 , with the assistance of a brake booster 68 .
- the booster 68 is also controlled by the controller 62 so as to vary the amount of assistance provided by the brake booster 68 and therefore the level of braking effort required from the driver to produce any particular level of braking torque at the wheels.
- a pump 60 b is also provided which can provide hydraulic pressure to actuate the brakes independently of the brake pedal.
- the pump 60 b is also controlled by the controller 62 .
- Brake fluid is returned to a reservoir 60 c on return from the brake calipers 55 , 56 , 57 , and 58 from where it is supplied to the pump 60 b or the master cylinder operated by the brake pedal 67 .
- the brake controller 62 also receives an input from a yaw sensor 69 which measures the yaw rate of the vehicle.
- the vehicle further comprises a suspension system 70 which includes an active air suspension system 72 and an active roll control system 74 .
- the active air suspension system 72 comprises an air spring 76 , 77 , 78 , 79 at each wheel, and a valve block 80 which controls the ride height of each of the wheels 11 , 12 , 13 , 14 and the spring rates of the air springs 76 , 77 , 78 , 79 by controlling the air pressure in each of the air springs, the supply of air under pressure to each of the air springs and the release of air from the air springs.
- the valve block 80 further controls the degree to which the two front air springs 76 , 77 are interconnected, the degree to which the rear air springs 78 , 79 are interconnected, and the degree to which the front air springs 76 , 77 are interconnected to the rear air springs 78 , 79 .
- the valve block 80 is controlled by an air suspension controller 82 which receives ride height signals from ride height sensors 83 , 84 , 85 , 86 arranged to measure the ride height of each of the wheels 11 , 12 , 13 , 14 .
- the suspension controller 82 can also measure the air pressure in each of the air springs 76 , 77 , 78 , 79 using a pressure sensor 88 in the valve block 80 , as well as the lateral acceleration of the vehicle using a lateral accelerometer 89 .
- the active roll control system 74 comprises a front anti-roll bar 90 which is connected between the two front wheels 11 , 12 and acts to resist roll of the front of the vehicle, and a rear anti-roll bar 92 which is connected between the two rear wheels 13 , 14 and acts to resist roll of the rear of the vehicle.
- Each of the anti-roll bars 90 , 92 is in two halves with a rotary actuator 94 , 96 acting between the two halves.
- These roll control actuators can actively increase (or decrease) the resistance to roll provided by the anti-roll bars by applying a roll correction torque under the control of the suspension controller 82 . They can therefore control the roll stiffness of the vehicle.
- the suspension system 70 is adjustable between a plurality of ride heights.
- ride heights there are three possible ride heights: “high” which is suitable for off-road driving; “low” which is suitable for high speed driving, for example on motorways, where a low wind resistance is required; and “standard” which is between the “high” and “low” settings and is suitable for most normal on-road driving.
- the interconnection between air springs of the active air suspension system 72 on opposite sides of the vehicle is variable between an “open” condition where there is interconnection between the two sides of the vehicle, and “closed” where there is no interconnection.
- the roll stiffness of the vehicle In the “closed” condition the roll stiffness of the vehicle is increased, and so is the overall spring rate of the suspension. This therefore makes the vehicle more suitable for driving on smooth surfaces at higher speeds.
- the roll stiffness In the “open” condition the roll stiffness is decreased, but the suspension can articulate more easily, making it more suitable for driving on rougher surfaces and at lower speeds.
- the interconnection valves are normally kept in the closed condition to provide high roll stiffness and stabilize the vehicle. Under certain conditions when there is a lot of vertical wheel travel the interconnection valves are opened to reduce resistance to this travel.
- the system also needs to close the interconnection at high vehicle speeds to stabilize the vehicle because opening the interconnection reduces resistance to roll as well as resistance to articulation.
- the system can be varied to vary the amount of wheel travel that is required to cause opening of the interconnection valves, so that the interconnection will open more or less easily, and to vary the vehicle speed above which the interconnection will be kept closed.
- the system has three settings: standard, medium and maximum. In the standard setting the interconnection will happen up to quite high speeds, of about 50 kph but only at quite high levels of articulation. In the medium setting the interconnection will occur only at lower speeds, but also at lower levels of articulation. In the maximum setting interconnection will occur only up to low speeds, of about 15 kph, but at even lower levels of articulation.
- the brake pedal effort is controllable according to a plurality of, in this case two, basic characteristics. These are “high” and “low” requiring relatively high and low levels of braking effort from the driver.
- further brake control functions can also be added to these basic characteristics under certain circumstances. For example a “panic assist” function detects very rapid brake pedal depression indicative of emergency braking and provides an increased level of braking assistance in response.
- the brake controller 62 provides an ABS (anti-lock) function which is also operable in a number of different configuration modes. There is a “high mu” mode for use on surfaces with a high coefficient of friction. In this mode a relatively high level of slip is allowed to maximize deceleration rates. There is also a “low mu” mode in which only much lower levels of slip are allowed so as to ensure that good control over the vehicle will be maintained at all times. Finally there is also a “plough” mode which is designed for surfaces, such as sand and snow, in which a barrier of matter will build up in front of a wheel which is slipping under braking. In this mode higher levels of slip are allowed even than in the “high mu” mode to take advantage of the braking effect of the build up of material in front of the wheels.
- the brake controller 62 and the engine management system 28 also provide an E.T.C. (electronic traction control) function in which the brakes are applied using the pump 60 b to counteract wheel spin caused by the powertrain 16 applying more torque to one or more of the wheels than can be transmitted through the tires to the ground.
- the detection of wheel spin is carried out using the wheel speed sensors 63 , 64 , 65 , 66 . If just one of the wheels is spinning, then that wheel is braked under the control of the brake controller 62 . If enough of the wheels are spinning to indicate that the overall drive torque is too high for the surface on which the vehicle is traveling, the engine management system 28 intervenes to reduce the overall power output of the engine 18 , thereby reducing wheel spin and maintaining traction.
- E.T.C. electronic traction control
- the E.T.C. function has “high mu” and “low mu” modes which, in similar manner to the A.B.S. function, allow higher and lower degrees of wheel spin, or slip, to allow more aggressive driving on higher friction surfaces, but maintain control on lower friction surfaces.
- the E.T.C. function also has a sand mode which keeps wheel spin low at low speeds, following the “low mu” mode, to prevent the wheels from digging into the sand, but allows more spin at higher speeds, following the “high mu” mode because at higher speeds on sand higher levels of wheel spin are less of a problem and can even improve traction.
- the brake controller 62 also provides a D.S.C. (dynamic stability control) function.
- This function monitors the vehicle speed and the steering angle using the wheel speed sensors 63 , 64 , 65 , 66 and the steering angle sensor 49 and determines the expected yaw rate of the vehicle. This is compared with the actual yaw rate as measured by the yaw sensor 69 , and the brakes are applied at individual wheels to control the vehicle yaw if it starts to deviate in an undesirable way from the expected yaw. Braking one or more of the outside wheels on a corner helps to neutralize oversteer, and braking one or more of the inside wheels on a corner helps to neutralize understeer.
- This function also has “high mu” and “low mu” modes in which the level of yaw deviation allowed is relatively high and relatively low respectively.
- the throttle pedal characteristic which relates the amount of torque provided by the engine 18 to the position of the throttle pedal 27 , can take a number of different forms. These include “quick” characteristic which is highly progressive, causing the torque to increase rapidly at low degrees of pedal displacement and then to increase more slowly at higher degrees of pedal displacement, and a “slow” characteristic in which the torque increases more slowly at lower levels of pedal displacement and more quickly at higher levels of pedal displacement.
- the throttle pedal characteristic may relate the vehicle speed directly to the throttle pedal position. In this case the rate at which vehicle speed varies with throttle pedal position can be varied between more and less progressive characteristics.
- the transfer box 21 can be shifted between a “high range” and a “low range” to select the range of gear ratios most suitable to the prevailing conditions in known manner.
- the automatic transmission 20 has a number of configuration modes each of which defines when shifts between gears will take place, in response to changes in throttle pedal position, vehicle speed, engine speed, engine torque and throttle pedal position, and some other factors which are occasionally relevant such as gearbox temperature and ambient temperature.
- the center differential 22 and the rear differential 26 each include a clutch pack and are controllable to vary the degree of locking between a “fully open” and a “fully locked” state.
- the actual degree of locking at any one time is controlled on the basis of a number of factors in a known manner, but the control can be adjusted so that the differentials are “more open” or “more locked”.
- the pre-load on the clutch pack can be varied which in turn controls the locking torque, i.e. the torque across the differential that will cause the clutch, and hence the differential, to slip.
- the front differential could also be controlled in the same way.
- all of the subsystem controllers that is the engine management system 28 , the transmission controller 30 , the steering controller 48 , the brakes controller 62 and the suspension controller 82 are all connected to a vehicle mode controller 98 which controls the configuration modes of operation of each of the subsystem controllers.
- the vehicle mode controller 98 stores input regarding driving conditions in its memory and provides the appropriate control commands to each subsystem controller.
- the subsystems, and each of the functions described above, are controlled so as to provide a number of driving modes for the vehicle.
- Each of the driving modes corresponds to a particular driving condition or set of driving conditions, and in each driving mode each of the functions is set to the function mode most appropriate to those conditions.
- the driving modes are selected by means of a driver input 99 which takes the form of a rotary knob which can be rotated by the driver to select any of the driving modes displayed as being available.
- a driver input 99 which takes the form of a rotary knob which can be rotated by the driver to select any of the driving modes displayed as being available.
- a touch screen, or a number of push buttons, one for each driving mode, could be used.
- the driving modes include three on-road modes, namely a motorway mode, a country road mode and a city driving mode, four off-road modes, namely a grass mode, a sand mode, a boulder or rock crawl mode and a mud mode, and also a rough road mode, a towing mode, which in this case is arranged for towing on-road and can therefore also be considered one of the on-road modes, and an ice mode.
- the function modes that these vehicle driving modes include are as follows.
- the vehicle mode controller 98 When the vehicle mode controller 98 is in “motorway” mode the vehicle functions and subsystem configurations are optimized for traveling at high speeds on flat surfaces with good levels of friction.
- the suspension ride height is set at “low” for low wind resistance and good stability.
- the air suspension interconnection is set at “standard” for good stability.
- the steering assistance is set so that it will be low at high speeds to give a firm steering feel, but will be speed dependent and increase at low vehicle speeds.
- the brake pedal effort is set at “high” to avoid rapid deceleration at high speed, but with “panic assist” to ensure that the vehicle can be slowed rapidly in an emergency.
- the A.B.S, E.T.C and D.S.C are all set to “high mu”.
- the throttle progression is set to the “slow” characteristic because this is actually more responsive to changes in throttle pedal position at higher levels of pedal displacement which will generally be used on a motorway.
- the transfer box 21 is set to “high range”, the transmission is set to “normal mode” and the center and rear differentials are both “more open”.
- the vehicle mode controller 98 When the vehicle mode controller 98 is in “country road” mode the function settings are the same as for the “motorway” mode, except for the suspension ride height and the transmission.
- the suspension ride height is set to “standard” because reduced wind resistance is less important and the road may be rougher requiring more ground clearance and more suspension bump travel.
- the transmission is set to “performance” mode, but the driver has the option of selecting “manual” mode.
- the throttle progression is set to “quick” and the brake effort set to “low” so as to assist the driver with rapid acceleration and braking.
- the function settings are again the same as for the “motorway” mode except the suspension ride height and the brake pedal effort.
- the ride height is set to standard and the brake pedal effort is set to low to assist the driver with the rapid and frequent starting and stopping associated with city driving.
- the transmission is set to use relatively high gears such as by using the “ice” mode so as to reduce the jerkiness of driving, and can even be set to start in second gear rather than first for the same reason.
- the throttle is set to the “slow” mode, again to reduce jerkiness.
- the throttle pedal characteristic is also set to high degree of damping, which uses a low-pass filter on the throttle pedal position signal so that if the pedal is moved quickly, the engine torque does not change as quickly. This also helps to reduce jerkiness. In some cases it might be preferred to use the “quick” mode characteristic with a high degree of damping so as to reduce the amount of pedal movement required from the driver, but still minimize jerkiness.
- the vehicle mode controller 98 When the vehicle mode controller 98 is in “towing” mode, this is assumed to be on-road towing and therefore many of the functions are again similar to the other on-road modes. Specifically all of the functions are at the same settings as in “motorway” mode, except the suspension ride height, the D.S.C., and the transfer box. The ride height is again set to “standard”. The D.S.C. is operated in a special “towing” mode which is designed to counteract instability brought about by the trailer. The transfer box 21 is in “high range” since towing will generally be carried out on-road. As an alternative to the selection of “high range” the transmission could be operated in a different configuration mode to help the vehicle to manage heavy towed loads. This could be using the “performance” mode which would tend to keep the transmission in lower gears than normal to help with pulling away under heavy loads. In an alternative towing mode the throttle pedal progression is set to “quick” so as to help avoid stalling on pull-away from rest.
- the vehicle mode controller 98 When the vehicle mode controller 98 is in “dirt track” mode many of the vehicle functions will need to be in different configuration modes from the on-road modes described above to take account of the fact that the surface is rough, although the vehicle might still be traveling at quite high speeds, so stability is still important.
- the ride height is set to “standard”. This is a compromise between being higher to give more suspension travel to accommodate the rough surface, and being lower for better stability.
- the air suspension interconnection is set to “medium” for good stability. However, if it is assumed that the dirt track will be very rough the interconnection could be set to “maximum” to accommodate the rough surface.
- the steering assistance is set to be speed dependent as in the motorway driving mode.
- the brake pedal effort is set to “high” to avoid sudden braking resulting from the jolting of the vehicle due to the rough surface.
- the A.B.S., E.T.C. and D.S.C. are all set to “low mu” because dirt tracks generally have a relatively high amount of loose material on them, and the friction is therefore generally quite low.
- the throttle progression is set to “slow” to avoid the jolting of the vehicle, and the resulting bouncing of the driver's foot on the accelerator pedal from producing undesired changes in the demanded level of torque.
- the transfer box 21 is in “high range” because speeds will generally be reasonably high.
- the transmission is in “normal” configuration mode for the same reason.
- the differential locks are both set to “more open”.
- the functions are set up to provide maximum stability on a slippery surface.
- the ride height setting is not critical to this requirement, but is set to “standard” configuration mode for the same reasons as in “dirt track” driving mode.
- the air suspension interconnection is set to “standard” to give good stability.
- the steering assistance is set to a low level of assistance because steering tends to become very “light” on ice and reducing the assistance will reduce the tendency of the driver to change the steering angle too much and too quickly.
- the brake pedal effort is set to “high” to avoid sudden braking which might reduce stability.
- the A.B.S., E.T.C. and D.S.C. are all set to “low mu” to maintain stability.
- the throttle progression is set to “slow” to avoid too rapid changes in torque demand which could cause wheel spin.
- the transfer box 21 is set to high range because speeds might still be relatively high, particularly if the vehicle is being driven on snowy roads.
- the automatic transmission 20 is set to “ice” mode configuration mode described above. Both of the differentials are set to “more open” for maximum stability.
- ‘Grass’ driving mode is similar to ‘ice’ driving mode because both are reasonably flat surfaces with low friction. Therefore many of the functions are in similar configuration modes to the “ice” mode. The differences are that the air suspension interconnection is set to “medium” or “maximum” to give better articulation which helps to improve traction, the transfer box 21 is in “low range” because driving speeds will generally be low on grass, and the center differential 22 is set to “more locked” to improve traction, in particular when climbing and descending hills.
- the rear differential 26 could be closed to improve traction, but this would adversely affect stability under some circumstances. It can therefore be closed at low speeds, but open increasingly as speed increases, for example above a threshold of 15 or 20 kph, to increase stability.
- “sand” driving mode the functions are the same as for “grass” mode configuration modes except the A.B.S., throttle progression and transmission.
- the A.B.S. is in the “plough surface” mode described above.
- the throttle progression is set to “quick” and the transmission is in the specifically designed “sand” mode described above.
- the E.T.C. is also set to the “sand” mode.
- the differentials are set to a standard setting.
- the suspension is set to “high” to give good ground clearance.
- the air suspension interconnection is set to “maximum” to give good articulation.
- the steering assistance is set to high because required steering torques can be high.
- the A.B.S. is set to “high mu”, although another possibility is to operate the A.B.S. in a de-sensitized mode. In this mode, at least at low speed and when the steering angle is low, i.e. the driver is steering straight, very high levels of slip, or even total wheel lock are allowed.
- the E.T.C. is set to “low mu” because wheel spin is very likely to occur.
- Another option is to provide a special E.T.C. mode in which the brakes are pre-pressurized either permanently or when high degrees of wheel articulation are detected, to pre-empt the occurrence of wheel spin.
- the D.S.C. is set to “high mu” because it is unlikely that it will be used.
- another option here is to disable the D.S.C. function altogether, at least below a relatively low threshold speed of, for example, 10 or 15 kph.
- the throttle progression is set to “slow” to give the driver the best possible control at low speeds.
- the transfer box 21 is set to “low range”.
- the automatic transmission 20 is set to “manual mode” because it is unlikely that the driver will want to change gear at all, and any undesired change of gear might affect the stability of the vehicle.
- the center and rear differentials are both set to “more locked” to give good traction.
- the functions are set to the same settings as in “grass” driving mode, except for the suspension ride height which is set to “high” to give better clearance over deep mud, and the rear differential 26 which is set to “more locked” to give better traction.
- the air suspension interlock can also be set to “maximum” in order to maximize traction.
- a second embodiment of the invention will now be described.
- all of the subsystem configurations are substantially the same as in the first embodiment, the second embodiment differing only in the manner in which the subsystems configurations are controlled.
- Some of the controlled functions described above are not altered by the driving mode selected, and one further function, a hill descent function, is included in the brake controller 62 , as will be described in more detail below.
- the second embodiment will therefore also be described with reference to FIGS. 1 to 4 .
- the functions which are controlled by the vehicle mode controller 98 are the throttle pedal characteristic, the gear changes in the transmission 20 , the locking torque of the center and rear differentials 22 , 26 , the traction control function, the yaw control function provided by the D.S.C. system, the air suspension ride height, the suspension cross linking, and the hill descent control function.
- the hill descent control defines a target speed and uses the brakes to control the vehicle speed to the target speed as the vehicle descends a hill.
- the target speed has a default value which is nominally 6 kph, but can be increased by depressing the accelerator pedal 27 and decreased by depressing the brake pedal down to a minimum value of 3 kph.
- the default target speed can be varied depending on the mode selected.
- the differential controller 30 is also arranged to receive inputs from the steering angle sensor 49 and the ride height sensors 83 , 84 , 85 , 86 , and to vary the locking torque of each of the center and rear differentials 22 , 26 in response to those inputs.
- the locking torque in particular of the rear differential 26 26 , is reduced so as to allow the wheels to rotate at different speeds as is required under cornering.
- the locking torque is generally increased as there is an increased likelihood of wheels slipping.
- the driving modes which are selectable in the second embodiment are: a standard mode, a grass/gravel/snow mode, a mud/ruts mode, a sand mode, a rock crawl (boulder) mode, and a dynamic mode.
- a standard mode a grass/gravel/snow mode
- a mud/ruts mode a sand mode
- a rock crawl (boulder) mode a dynamic mode.
- the configuration modes for the various systems are designed to be a compromise that will be suitable for all conditions.
- the throttle characteristic, gearbox control, traction control and DSC are set to be suitable for normal on-road driving.
- the throttle characteristic which relates engine drive torque to throttle pedal depression, is indicated by curve A which provides a steady increase in torque with increasing throttle depression.
- the differentials are also controlled in a manner suitable for normal on-road driving.
- the differential locking torque is arranged to start at a pre-load level and increase gradually with slip across the differential as shown in curve A.
- the locking torque is also arranged to increase gradually with suspension articulation as indicated by curve A.
- the differential controller are also arranged to give a degree of yaw control via the rear differential 26 .
- the HDC system is switched off, the suspension ride height is set to standard ride height and the suspension cross linking is set to its minimum.
- the traction control is arranged to provide a braking torque to any wheel which is detected as spinning, the torque starting when the spinning reaches a predetermined threshold level, and increasing gradually with increasing wheel spin as indicated by curve A.
- the D.S.C. system is arranged to provide a steering torque by applying a differential in braking torque between the two sides of the vehicle. This brake steering torque starts when the yaw error rate, which is the difference between the expected yaw rate and the measured yaw rate, reaches a predetermined level and increases with increasing yaw error rate as shown by curve A.
- the grass/gravel/snow driving mode is intended for use on grass, gravel and snow and other low friction surfaces into which the wheels of the vehicle will not sink to a significant depth.
- the throttle characteristic is set to provide a gentle response, that is a low increase in drive torque for any change in throttle pedal position over most of the range of throttle pedal position, as shown by curve B.
- the torque increases at a more rapid rate so that the maximum torque can be achieved at full throttled pedal depression.
- This characteristic is arranged to avoid wheel spin by giving a gentle response within the normal range of throttle pedal positions.
- the gearbox control is also arranged to avoid wheel spin, and is therefore arranged to change up gears relatively early, i.e.
- the differentials are arranged to have an increased locking torque generally, compared to the standard driving mode, as shown by curve B in FIG. 8 , so as to reduce the amount of wheel spin which is more likely to occur on low friction surfaces.
- the differential controller 30 is also arranged to respond more rapidly to detected slipping of the differentials, increasing the locking torque more rapidly in response to detected slip of the differentials than in the standard mode.
- the response of the differentials to suspension articulation is the same as in standard mode.
- the traction control is arranged to respond more quickly to wheel spin, as shown by curve B in FIG. 10 , by braking spinning wheels more rapidly and therefore allowing less spin than in the standard mode.
- the braking starts at lower levels of spin and increases more rapidly with increasing spin, compared to the standard mode.
- the engine intervention within the traction control is switched on so as to further reduce the likelihood of wheel spin.
- the D.S.C. system is set up as for the standard mode.
- the hill descent control function is switched on with a low default target speed of, for example, 3 or 4 kph to improve control of the vehicle when descending hills in slippery conditions.
- the suspension ride height is set to standard, and the suspension cross linking is set to standard since on these surfaces high degrees of articulation are not expected. Alternatively the cross linking could be set to medium or even maximum to improve traction, provided the cut-out speed at which the interconnection is closed is low to avoid loss of stability.
- the throttle characteristic, gearbox control, differential control and stability control are the same is in grass/gravel/snow driving mode.
- the traction control is also the same except that the engine intervention is switched off, or at least minimized.
- the differential control is the same as for grass/gravel/sand driving mode, but the sensitivity of the control to changes in steering angle is reduced since the relatively small amount of wheel slip that will result from cornering is less likely to cause a loss of traction than is the spinning of one of the wheels due to a loss of grip.
- the differential control includes a turning factor which starts to decrease the locking torque when the steering angle increases above 120° and reduces the locking torque to zero when the steering angle reaches 200°.
- the D.S.C. system is de-sensitized as shown by curve B in FIG. 11 .
- the hill descent control is switched on with the standard default target speed of 6 kph to provide maximum control on hills, the suspension ride height is set to the high setting so as to increase ground clearance, which is desirable in deep mud and ruts, and the suspension cross linking is set to the maximum setting to maximize traction.
- the subsystem configuration modes are set up for driving on sand, and in particular to provide the best traction on sand.
- the throttle characteristic is as shown by curve C in FIG. 7 , and is arranged to be relatively gentle at low degrees of throttle pedal depression so as to reduce the chances of wheel spin at low speeds. Therefore at low degrees of pedal depression the torque produced is lower, for any given pedal position, than in the standard mode.
- the transmission control operates in the sand mode described above in the first embodiment.
- the differential control is the same as in the mud/ruts mode, again having a low sensitivity to steering angle for the same reason.
- the traction control system is set up to allow higher levels of wheel spin than in the standard mode as shown by curve C in FIG. 10 .
- the traction control may use a special sand mode configuration as described above for the first embodiment in which wheel spin is kept very low at low vehicle speeds, but is allowed to increase to relatively high levels at higher vehicle speeds.
- the engine intervention is switched off to prevent undesirable reductions in drive torque.
- the D.S.C. system is set to a low sensitivity as shown by curve C in FIG. 11 , brake steer torque being introduced only at high levels of yaw rate error and increasing slowly with increasing yaw rate error.
- the D.S.C. system can be turned off altogether in sand mode.
- the hill descent control is switched off because sand generally provides a high degree of drag and the vehicle either needs to be driven positively down a hill rather than braked, or, if braking is required, engine braking is generally sufficient.
- the suspension ride height is set to standard height and the suspension cross linking is set to minimum.
- the throttle characteristic is set, as in grass/gravel/snow and mud/ruts driving modes, to follow curve B in FIG. 7 , i.e. to be relatively insensitive to changes in throttle pedal position over the range of positions usually used.
- Gearbox control is also set up as for grass/gravel/snow and mud/ruts driving modes.
- the differentials are set up to follow curve B in FIG. 8 , i.e. to have a higher starting locking torque than in grass/gravel/snow and mud/ruts driving modes, and to increase the locking torque more rapidly in response to differences in wheel speeds between the vehicles wheels, as measured by slip across the differentials.
- the response of the differential control to suspension articulation is also increased as shown by curve B in FIG.
- the traction control and D.S.C. are set up as in the mud/ruts mode, the traction control following curve B in FIG. 10 to provide an increased sensitivity to wheel spin, and the D.S.C. following curve B in FIG. 11 to provide a decreased sensitivity to yaw rate error.
- the hill descent control is switched on with a low default target speed of, for example 3 kph, the suspension ride height is set to high to give best ground clearance and the suspension cross linking is set to maximum to allow maximum suspension articulation.
- an improved rock crawl driving mode may be included in which the subsystem configuration modes are selected to achieve and maintain the requested vehicle speed.
- the engine controller 28 in the form of an engine management system controls operation of the engine 18 so as to control its speed and output power and torque in response to driver inputs.
- the driver inputs may be in the form of the traditional cruise control switches, or preferably via the accelerator pedal.
- the engine controller 28 will operate as a torque controller and will determine the error between actual road speed and the requested road speed demanded by the driver. This error will then be managed by the engine controller 28 .
- One alternative for managing the error would consist of a proportional, integral and differential term strategy.
- the engine controller 28 will be optimized to enable the requested road speed to be achieved and maintained, using up to maximum available torque while providing comfort and predictability to the driver.
- the accelerator pedal will allow large throttle movement resulting in small requested changes in road speed. This will help to alleviate the movement of the driver's foot caused by the sometimes-violent movement of the vehicle over rough terrain.
- the accelerator pedal may transfer from a vehicle speed controller to a torque controller, to enable the driver to accelerate at a higher rate.
- the road speed request will be zero to provide maximum engine braking and idle.
- the improved rock crawl mode may also include an improved Hill Descent control system.
- the hill descent control would control to a specific road speed or zero road speed if the throttle were closed.
- a dynamic driving mode is included which is intended for more sporty driving.
- the throttle pedal characteristic follows curve D in FIG. 7 , being arranged to produce the most engine torque for any given throttle pedal position, and the most rapid increase in engine torque in response to throttle pedal depression, over the lower range of throttle pedal depressions.
- the gearbox control is also arranged to keep the gearbox in lower gear then in the standard mode, with the changes up being delayed when the vehicle is accelerating and changes down being made early when the vehicle is slowing, so as to give the best acceleration and the most engine braking on deceleration.
- the traction control and D.S.C and differentials are set to the same settings as in standard driving mode, the suspension is set to its lowest ride height, and the hill descent control is turned off.
- the driving mode in which the vehicle operates is determined by two separate inputs.
- One input a rotary terrain knob 100
- a rotary “mode of use” knob 102 allows the user to input the mode in which the vehicle is to be used.
- This can include vehicle modes relating to the manner in which the vehicle is to respond to the driver's inputs, such as a sport mode or an economy mode, as well as modes relating to the state of the vehicle, such as a towing mode suitable for towing a trailer, and a laden mode for when the vehicle is carrying a particularly heavy load.
- the vehicle “mode of use” knob allows selection of normal, sport, and towing vehicle driving modes.
- the sport driving mode is adapted for use when the vehicle is being driven in a “sporty” manner, characterized for example by one or more of: rapid acceleration and braking, high cornering speeds, high engine speeds and relatively low gears for any given vehicle speed.
- the terrain selection input allows the selection of standard, grass/gravel/snow, mud/ruts, sand, and rocks driving modes as in the second embodiment.
- the “mode of use” input is set to normal the operating modes of the vehicle correspond to the driving modes in the second embodiment.
- the mode-of-use input is turned to towing mode, then each of the terrain modes selected is modified to make the vehicle more effective at towing.
- the suspension ride height is locked, or changes in height restricted, so as to avoid tilting the trailer, and the throttle map and gear change map are modified so as to provide a high level of torque when pulling away from rest.
- the sport mode-of-use is selected, the subsystem configuration modes are controlled so as to provide a sporty driving feel: the suspension is lowered, the throttle map and gear change maps are modified to provide rapid acceleration and high levels of engine braking.
- one or more of the mode-of-use selections may be inappropriate and selection of those modes-of-use may not result in modification of the vehicle control when those terrains are selected.
- the sport mode-of-use may not be selectable, or may have no effect on the vehicle, of selected in combination with rock crawl, mud/ruts or grass/gravel/snow. Towing is, however, selectable with all terrain selections.
- a vehicle according to a fourth embodiment of the invention has a powertrain similar to that of the first embodiment and shown in FIG. 1 , and corresponding parts are indicated by the same reference numeral increased by 100 .
- the difference between this embodiment and the first is that the center differential is replaced by a power take off system 122 which includes a direct coupling 122 a between the transfer box 121 and the front differential 124 , and a clutch mechanism 122 b which can be controlled by the powertrain controller 130 to redirect drive torque to the rear differential 126 and hence to the rear wheels 113 114 .
- the clutch mechanism 122 b allows substantially all of the driving torque to be transmitted directly to the front wheels via the front differential 124 .
- the clutch mechanism 122 b is operated to direct drive torque to the rear wheels 113 , 114 via the rear differential 126 .
- the proportion of the drive torque which is re-directed to the rear differential 126 is controlled so as to reduce the amount of slip at the front wheels to an acceptable level.
- the clutch 122 b is set to a pre-load which is variable, and the clutch load is then increased in response to detected slip of the front wheels 111 , 112 . In situations where good traction is required, a high pre-load and high sensitivity to slip are desirable. For good dynamic performance a low re-load is desirable and sensitivity to slip is less important.
- the degree of slip is set to be low at low speeds and higher at higher speeds in a similar manner to the traction control system.
- the fourth embodiment also includes, as well as springs 176 in its suspension system, dampers 177 arranged to damp vertical movement of the wheels 111 relative to the vehicle's body 115 .
- the dampers 177 are electrically controlled, having a variable damping rate, which is variable between a high level, where relatively high resistance is provided to vertical wheel travel, and a lower rate at which less resistance is provided.
- the damping of each of the dampers 177 is controlled by the suspension controller 182 .
- the damping can be controlled in response to a number of parameters such as vehicle speed and steering angle to improve ride and handling.
- the amount of damping is also varied depending on which mode is selected. In on-road modes a high degree of damping is generally provided to give good handling, and in off-road modes lower damping is provided to give good traction.
- the vehicle mode controller 98 uses information passed on from the various subsystem controllers relating to the nature of the surface over which the vehicle is traveling, the manner in which the vehicle is being driven, and the way in which the vehicle is being used, to select an appropriate mode automatically.
- the wheel speed sensors and ride height sensor are used to classify the nature of the surface as on-road or off-road, high friction or low friction, etc.
- the powertrain controller 130 and steering angle sensor 49 are used to classify the driving style as normal or sporty. It is also possible to determine from the various sensors whether the vehicle is heavily laden.
- the automatic mode selection can either be the sole means of selecting modes, giving the driver no input to the mode selection process. Alternatively it may be advisory, with the driving having the option to override the automatic selection of mode. In a further alternative the driver may have the primary control over the selection of the driving mode, with the vehicle mode controller 98 over-riding the driver's selection if the driving conditions or driving style of the driver make the driver's selection unsafe.
- the number of available modes can be varied depending on the requirements for a particular vehicle. For example in the simplest case, it might be that only two modes were required, which might be the standard mode which would be suitable for “on-road” driving and the rock crawl mode which would be suitable for “off-road driving”. Alternatively, there could be one on-road mode and two off-road modes, for example the rock crawl mode and the grass/gravel/snow mode.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Vehicle Body Suspensions (AREA)
Abstract
A vehicle control system has a plurality of subsystem controllers including an engine management system 28, a transmission controller 30, a steering controller 48, a brakes controller 62 and a suspension controller 82. These subsystem controllers are each operable in a plurality of subsystem modes, and are all connected to a vehicle mode controller 98 which controls the modes of operation of each of the subsystem controllers so as to provide a number of driving modes for the vehicle. Each of the modes corresponds to a particular driving condition or set of driving conditions, and in each mode each of the functions is set to the function in mode most appropriate to those conditions.
Description
More than one reissue application has been filed for the reissue of U.S. Pat. No. 7,349,776. The reissue application numbers are Ser. Nos. 15/277,516 and 15/949,385 (the present application), which is a continuation reissue application of application Ser. No. 15/277,516.
1. Field of the Invention
The present invention relates to the control of vehicles, in particular to the coordinated control of a number of subsystems of a vehicle.
2. Background Art
Various systems are known in which operation of various subsystems of a vehicle can operate in different configuration modes so as to suit different conditions. For example, automatic transmissions can be controlled in sport, winter, economy and manual configuration modes in which the changes between gear ratios and other subsystem control parameters are modified so as to suit the prevailing conditions or the taste of the driver. Air suspensions are known with on-road and off-road configuration modes. Stability control systems can be operated at reduced activity so as to give the driver more direct control over the operation of the vehicle. Power steering systems can be operated in different configurations modes where the level of assistance is at different levels or varies in different ways. Vehicle transmissions can be switched to provide drive to different numbers of wheels. Also the locking or partial locking of differentials can be controlled to suit the prevailing driving conditions.
As the number of controllable systems increases, the driver will become faced with an increasing number of choices as to which configuration modes to select for each of the systems. Unless the driver is very experienced, this can become complicated and confusing.
Therefore, systems have been proposed in which the control of a number of the vehicle subsystems is coordinated by a central vehicle controller, which can be switched between a number of modes thereby controlling all of the subsystems in a coordinated way which is simple for the driver to control. Such a system is disclosed in GB2273580.
While GB2273580 teaches an integrated control system to control and configure vehicle operating subsystems in response to control signals, drivers often encounter a broad range of surfaces and terrains in both on-road and off-road settings. Unfortunately, the operating characteristics of such an integrated control system does not provide the driver with the ability to provide direct input regarding the surface terrain in an attempt to better select the appropriate subsystem configuration modes. This deficiency results in the less than optimal stability, handling, and safety performance of the vehicle. Therefore, to further expand the performance of motor vehicles including integrated control systems as noted above, there is a need for an integrated control system which will provide improved control of the vehicle on a broad range of surfaces.
The present invention aims to provide a vehicle control system which can be operated so as to provide improved control of the vehicle on a broader range of surfaces, and in particular in a plurality of different off-road surfaces and terrains such as might be encountered when driving off-road.
Accordingly the present invention provides a vehicle control system arranged to control a plurality of vehicle subsystems each of which is operable in a plurality of subsystem configuration modes, wherein the vehicle control system is operable in a plurality of driving modes in each of which it is arranged to select the subsystem configuration modes in a manner suitable for a respective driving surface.
Preferably each of the subsystems is operable in a plurality of subsystem configuration modes and in each of the driving modes the subsystem configuration modes are selected in a manner suitable for driving on the respective surface.
Preferably one of the subsystems comprises a suspension system and said plurality of subsystem configuration modes comprises a plurality of ride heights.
Preferably one of the subsystems comprises a fluid suspension system in which fluid interconnection can be made between suspensions for wheels on opposite sides of the vehicle, and said plurality of subsystem configuration modes provide different levels of said interconnection.
Preferably one of the subsystems comprises a steering system which can provide steering assistance, and said plurality of subsystem configuration modes provides different levels of said steering assistance.
Preferably one of the subsystems comprises a braking system which can provide braking assistance, and said plurality of subsystem configuration modes provides different levels of said braking assistance.
Preferably one of the subsystems comprises a brake control system which can provide an anti-lock function to control wheel slip, and said plurality of subsystem configuration modes allow different levels of said wheel slip.
Preferably one of the subsystems comprises a traction control system which is arranged to control wheel spin, and said plurality of subsystem configuration modes allow different levels of said wheel spin.
Preferably one of the subsystems comprises a yaw control system which is arranged to control vehicle yaw, and said plurality of subsystem configuration modes allow different levels of divergence of said vehicle yaw from an expected yaw.
Preferably one of the subsystems comprises a range change transmission and said subsystem configuration modes include a high range mode and a low range mode of said transmission.
Preferably one of the subsystems comprises a powertrain system which includes a powertrain control means and a throttle pedal, the subsystem configuration modes providing different levels of responsiveness of the powertrain control means to movement of the throttle pedal.
Preferably one of the subsystems comprises a transmission system operable in a plurality of transmission ratios and including a transmission control means arranged to monitor at least one parameter of the vehicle and to select the transmission ratios in response, and wherein the subsystem modes include a plurality of transmission configuration modes in which the transmission ratios are selected differently in response to said at least one parameter.
Preferably one of the subsystems comprises a differential system operable to provide a plurality of levels of differential lock, and the subsystem configuration modes are arranged to provide different levels of said lock.
Preferably the differential system is arranged to control the level of differential lock on the basis of a plurality of inputs, and to respond differently to said inputs in each of the modes.
The differential may be a center differential, a front differential, or a rear differential.
Preferably one of the subsystems comprises a roll control system arranged to provide roll correction to reduce vehicle roll and the subsystem configuration modes provide different levels of roll correction of the vehicle, at least under some driving conditions.
Preferably one of the subsystems is a speed control system arranged to control the speed of the vehicle when descending a hill. The speed control system may be arranged to control the vehicle to different speeds in the different configuration modes.
Preferably the driving modes include an off-road mode in which the subsystems are controlled in a manner suitable for driving on rough terrain and an on-road mode in which the subsystems are controlled in a manner suitable for driving on-road.
Preferably the suspension system is arranged to provide a higher ride height in the off road mode than in the on-road mode.
Preferably in the off-road mode a higher level of said interconnection is provided than in the on-road mode.
Preferably the traction control system is arranged to allow less wheel spin in the off-road mode than in the on-road mode.
Preferably the yaw control system is arranged to allow a higher degree of said divergence in the off-road mode than in the on-road mode.
Preferably in the off-road mode the range change transmission is operated in the low range.
Preferably in the off-road mode the powertrain control means is arranged to provide lower levels of drive torque, for a given throttle pedal position, at least at low levels of throttle pedal depression, than in the on-road mode.
Preferably the differential system is arranged to provide higher levels of differential lock in the off-road mode than in the on-road mode.
Preferably the roll control system is arranged to provide a higher roll stiffness in the on-road mode than in the off-road mode.
Preferably the speed control system is arranged to be switched on in the off-road mode and switched off in the on-road mode.
Preferably the driving modes include at least one low friction mode in which the subsystems are controlled in a manner suitable for driving on low friction surfaces and a high friction mode in which the subsystems are controlled in a manner suitable for driving on high friction surfaces.
Preferably the brake control system allows higher levels of slip in the high friction mode than in the low friction mode.
Preferably the traction control system allows higher levels of wheel spin in the high friction mode than in the low friction mode.
Preferably the braking control system provides a greater level of braking assistance in the high friction mode than in the low friction mode.
Preferably the powertrain control means is arranged to provide lower levels of drive torque, for a given throttle pedal position, at least at low levels of throttle pedal depression, in the low friction mode than in the high friction mode.
Preferably the transmission system is arranged to operate in higher gears for a given value of said at least one parameter in the high friction mode than in the low friction mode.
Preferably the differential system is arranged to provide higher levels of differential lock in the low friction mode than in the high friction mode.
The high friction mode may comprise a standard or default mode in which the vehicle will operate normally and which is suitable for on-road driving.
Preferably there are two such low friction modes and the suspension system is arranged to provide a higher ride height in one of the low friction modes than in the other.
Preferably there are two such low friction modes and the suspension system is arranged to provide a higher level of said cross linking in one of the low friction modes than in the other.
For example the two low friction modes may comprise a mud mode suitable for traveling through deep mud, and another low friction mode suitable for driving in snow, on grass, or on gravel.
Alternatively there may be a plurality of low friction modes, one of which may be a grass mode in which the subsystems are controlled in a manner suitable for driving on grass, one of which may be an ice mode in which the subsystems are controlled in a manner suitable for driving in ice, and one of which may be a mud mode in which the subsystems are controlled in a manner suitable for driving on mud.
Preferably one of the modes is a sand mode in which the subsystems are controlled in a manner suitable for driving on sand. Preferably at least one of the subsystems is arranged, in the sand mode, to allow only relatively low levels of wheel spin when the vehicle is traveling at low speeds so as to avoid the vehicle wheels becoming submerged in sand, but to allow relatively high levels of wheel spin when the vehicle is traveling at higher speeds.
Preferably the powertrain control system is arranged to provide relatively low levels of drive torque for a given throttle pedal position at low vehicle speeds and to provide relatively high levels of drive torque for a given throttle pedal position at higher vehicle speeds.
The off-road mode may be a rock crawl mode in which the subsystems are controlled in a manner suitable for driving over rocks. Alternatively it may be set up for more general off-road use.
One of the modes may be a rough-road mode in which the subsystems are controlled in a manner suitable for driving on rough roads, for example for driving at relatively high speeds over rough surfaces.
At least one of the modes may be a plough surface mode in which the brake control subsystem is arranged to allow a relatively high degree of wheel slip under braking. This is useful, for example on snow or sand, where the build up of matter in front of the wheels under braking can improve braking performance.
Preferably at least one of the modes is an on-road mode in which the subsystems are controlled in a manner suitable for driving on-road. For example, one of the modes may be a motorway mode in which the subsystems are controlled in a manner suitable for driving at high speed on a flat road surface, or one of the modes may be a country road mode in which the subsystems are controlled in a manner suitable for driving on country roads.
The driving modes may be selectable by means of two inputs, one of which is a terrain selection input arranged to influence the mode selected on the basis of the terrain selected, and the other which is a mode of use input arranged to influence the mode selected on the basis of a selected mode of use of the vehicle. Each of these inputs may be user-controlled inputs, or may be derived from one or more sensors.
The mode of use input may be arranged to allow selection between a plurality of driving styles, which may include, for example, a normal style, a sport style, and an economy style.
Alternatively, or in addition, the mode of use input may be arranged to allow selection between a plurality of states of the vehicle, for example including a towing state or a loaded state.
The present invention further provides a vehicle comprising a system according to the invention and said plurality of subsystems. Preferred embodiments of the present invention will now be described by way of example only with reference to the accompanying drawings and the appended claims.
Referring to FIG. 1 , according to a first embodiment of the invention a vehicle 10 has four wheels 11, 12, 13, 14 and a powertrain 16 for providing driving torque to the wheels. The powertrain 16 comprises an engine 18, an automatic transmission 20 which transmits drive torque at any of a number of transmission ratios, via a transfer box 21 to the input side of a center differential 22. Front and rear differentials 24, 26 receive torque from the center differential 22 and transmit it to the front wheels 11, 12 and rear wheels 13, 14 respectively. An engine controller 28 in the form of an engine management system controls operation of the engine 18 so as to control its speed and output power and torque in response to inputs from the driver from a throttle pedal 27, the position of which is measured with a throttle pedal position sensor 29. A transmission controller 30 controls the transmission ratio of the automatic transmission 20, and the selection of high or low range in the transfer box 21. It also controls the center differential 22 so as to control the distribution of drive torque between the front and rear axles, and the rear differential 26 so as to control the distribution of drive torque between the two rear wheels 13, 14. The transmission controller 30 could also control the distribution of drive torque between the front two wheels 13, 14.
Referring to FIG. 2 , the vehicle further comprises a steering system 40 for steering the front wheels 11, 12, and a brake system 50 for braking all four wheels 11, 12, 13, and 14. The steering system 40 comprises a steering wheel 41, a steering column 42 for transmitting steering input torque input by the driver to the steering wheel to pinion 43 of a rack and pinion steering system. The pinion 43 transmits the steering torque to a rack 44, which is connected to steering arms 45 by means of which it applies a steering force to the steering knuckles 46 of the front wheels to steer them. A PAS (power assisted steering) motor 47 applies steering forces to the rack 44 to assist the driver in steering the vehicle, under the control of a steering controller 48 which receives inputs from a steering angle sensor 49, which measures the steering angle of the steering wheel 41.
The brake system 50 comprises a brake disk 51, 52, 53, 54, and a brake caliper 55, 56, 57, 58 for each of the wheels each of which is actuated hydraulically from a hydraulic brake control block 60. The hydraulic control block 60 controls the hydraulic pressure and hence the braking torque at each wheel under the control of a brake controller 62 which receives wheel speed signals from wheels speed sensors 63, 64, 65, 66 at each of the wheels. A driver operated brake pedal 67 provides via a master cylinder the driver input to the brake system 50 and creates hydraulic pressure to operate the brakes at a first inlet port 60a to the control block 60, with the assistance of a brake booster 68. The booster 68 is also controlled by the controller 62 so as to vary the amount of assistance provided by the brake booster 68 and therefore the level of braking effort required from the driver to produce any particular level of braking torque at the wheels. A pump 60b is also provided which can provide hydraulic pressure to actuate the brakes independently of the brake pedal. The pump 60b is also controlled by the controller 62. Brake fluid is returned to a reservoir 60c on return from the brake calipers 55, 56, 57, and 58 from where it is supplied to the pump 60b or the master cylinder operated by the brake pedal 67. The brake controller 62 also receives an input from a yaw sensor 69 which measures the yaw rate of the vehicle.
Referring to FIG. 3 , the vehicle further comprises a suspension system 70 which includes an active air suspension system 72 and an active roll control system 74. The active air suspension system 72 comprises an air spring 76, 77, 78, 79 at each wheel, and a valve block 80 which controls the ride height of each of the wheels 11, 12, 13, 14 and the spring rates of the air springs 76, 77, 78, 79 by controlling the air pressure in each of the air springs, the supply of air under pressure to each of the air springs and the release of air from the air springs. The valve block 80 further controls the degree to which the two front air springs 76, 77 are interconnected, the degree to which the rear air springs 78, 79 are interconnected, and the degree to which the front air springs 76, 77 are interconnected to the rear air springs 78, 79. The valve block 80 is controlled by an air suspension controller 82 which receives ride height signals from ride height sensors 83, 84, 85, 86 arranged to measure the ride height of each of the wheels 11, 12, 13, 14. The suspension controller 82 can also measure the air pressure in each of the air springs 76, 77, 78, 79 using a pressure sensor 88 in the valve block 80, as well as the lateral acceleration of the vehicle using a lateral accelerometer 89.
The active roll control system 74 comprises a front anti-roll bar 90 which is connected between the two front wheels 11, 12 and acts to resist roll of the front of the vehicle, and a rear anti-roll bar 92 which is connected between the two rear wheels 13, 14 and acts to resist roll of the rear of the vehicle. Each of the anti-roll bars 90, 92 is in two halves with a rotary actuator 94, 96 acting between the two halves. These roll control actuators can actively increase (or decrease) the resistance to roll provided by the anti-roll bars by applying a roll correction torque under the control of the suspension controller 82. They can therefore control the roll stiffness of the vehicle.
Within the systems described above there are various functions which can be controlled in different ways depending on the prevailing driving conditions. These functions will now be described.
The suspension system 70 is adjustable between a plurality of ride heights. In this case there are three possible ride heights: “high” which is suitable for off-road driving; “low” which is suitable for high speed driving, for example on motorways, where a low wind resistance is required; and “standard” which is between the “high” and “low” settings and is suitable for most normal on-road driving.
The interconnection between air springs of the active air suspension system 72 on opposite sides of the vehicle is variable between an “open” condition where there is interconnection between the two sides of the vehicle, and “closed” where there is no interconnection. In the “closed” condition the roll stiffness of the vehicle is increased, and so is the overall spring rate of the suspension. This therefore makes the vehicle more suitable for driving on smooth surfaces at higher speeds. In the “open” condition the roll stiffness is decreased, but the suspension can articulate more easily, making it more suitable for driving on rougher surfaces and at lower speeds. The interconnection valves are normally kept in the closed condition to provide high roll stiffness and stabilize the vehicle. Under certain conditions when there is a lot of vertical wheel travel the interconnection valves are opened to reduce resistance to this travel. However the system also needs to close the interconnection at high vehicle speeds to stabilize the vehicle because opening the interconnection reduces resistance to roll as well as resistance to articulation. The system can be varied to vary the amount of wheel travel that is required to cause opening of the interconnection valves, so that the interconnection will open more or less easily, and to vary the vehicle speed above which the interconnection will be kept closed. The system has three settings: standard, medium and maximum. In the standard setting the interconnection will happen up to quite high speeds, of about 50 kph but only at quite high levels of articulation. In the medium setting the interconnection will occur only at lower speeds, but also at lower levels of articulation. In the maximum setting interconnection will occur only up to low speeds, of about 15 kph, but at even lower levels of articulation.
The brake pedal effort is controllable according to a plurality of, in this case two, basic characteristics. These are “high” and “low” requiring relatively high and low levels of braking effort from the driver. However further brake control functions can also be added to these basic characteristics under certain circumstances. For example a “panic assist” function detects very rapid brake pedal depression indicative of emergency braking and provides an increased level of braking assistance in response.
The brake controller 62 provides an ABS (anti-lock) function which is also operable in a number of different configuration modes. There is a “high mu” mode for use on surfaces with a high coefficient of friction. In this mode a relatively high level of slip is allowed to maximize deceleration rates. There is also a “low mu” mode in which only much lower levels of slip are allowed so as to ensure that good control over the vehicle will be maintained at all times. Finally there is also a “plough” mode which is designed for surfaces, such as sand and snow, in which a barrier of matter will build up in front of a wheel which is slipping under braking. In this mode higher levels of slip are allowed even than in the “high mu” mode to take advantage of the braking effect of the build up of material in front of the wheels.
The brake controller 62 and the engine management system 28 also provide an E.T.C. (electronic traction control) function in which the brakes are applied using the pump 60b to counteract wheel spin caused by the powertrain 16 applying more torque to one or more of the wheels than can be transmitted through the tires to the ground. The detection of wheel spin is carried out using the wheel speed sensors 63, 64, 65, 66. If just one of the wheels is spinning, then that wheel is braked under the control of the brake controller 62. If enough of the wheels are spinning to indicate that the overall drive torque is too high for the surface on which the vehicle is traveling, the engine management system 28 intervenes to reduce the overall power output of the engine 18, thereby reducing wheel spin and maintaining traction. The E.T.C. function has “high mu” and “low mu” modes which, in similar manner to the A.B.S. function, allow higher and lower degrees of wheel spin, or slip, to allow more aggressive driving on higher friction surfaces, but maintain control on lower friction surfaces.
The E.T.C. function also has a sand mode which keeps wheel spin low at low speeds, following the “low mu” mode, to prevent the wheels from digging into the sand, but allows more spin at higher speeds, following the “high mu” mode because at higher speeds on sand higher levels of wheel spin are less of a problem and can even improve traction.
The brake controller 62 also provides a D.S.C. (dynamic stability control) function. This function monitors the vehicle speed and the steering angle using the wheel speed sensors 63, 64, 65, 66 and the steering angle sensor 49 and determines the expected yaw rate of the vehicle. This is compared with the actual yaw rate as measured by the yaw sensor 69, and the brakes are applied at individual wheels to control the vehicle yaw if it starts to deviate in an undesirable way from the expected yaw. Braking one or more of the outside wheels on a corner helps to neutralize oversteer, and braking one or more of the inside wheels on a corner helps to neutralize understeer. This function also has “high mu” and “low mu” modes in which the level of yaw deviation allowed is relatively high and relatively low respectively.
The throttle pedal characteristic, which relates the amount of torque provided by the engine 18 to the position of the throttle pedal 27, can take a number of different forms. These include “quick” characteristic which is highly progressive, causing the torque to increase rapidly at low degrees of pedal displacement and then to increase more slowly at higher degrees of pedal displacement, and a “slow” characteristic in which the torque increases more slowly at lower levels of pedal displacement and more quickly at higher levels of pedal displacement. In an alternative to this type of arrangement the throttle pedal characteristic may relate the vehicle speed directly to the throttle pedal position. In this case the rate at which vehicle speed varies with throttle pedal position can be varied between more and less progressive characteristics.
The transfer box 21 can be shifted between a “high range” and a “low range” to select the range of gear ratios most suitable to the prevailing conditions in known manner.
The automatic transmission 20 has a number of configuration modes each of which defines when shifts between gears will take place, in response to changes in throttle pedal position, vehicle speed, engine speed, engine torque and throttle pedal position, and some other factors which are occasionally relevant such as gearbox temperature and ambient temperature. There is a “normal” mode which provides a reasonable compromise between fuel economy and driving performance, a “performance” which generally keeps the transmission in lower gears than in the normal mode, particularly when the driver is requesting a high level of driving torque to accelerate the vehicle, and a “manual” mode in which the control of gear changes is given completely to the driver. There is also an “ice” mode which generally keeps the transmission in higher gears than the normal mode, in particular under acceleration from rest, to avoid loss of traction due to wheel spin, and a “sand” mode which keeps the transmission in relatively high gears at low speed to avoid excessive wheel spin which can result in the wheels digging themselves into the sand, but uses relatively low gears at higher speeds where a relatively high degree of wheel slip can be desirable to provide maximum traction, and lower gearing helps the engine 18 to remain in an operating region where the engine speed is high and the power output is high, thereby helping to avoid the vehicle becoming “bogged down” by a lack of power.
The center differential 22 and the rear differential 26 each include a clutch pack and are controllable to vary the degree of locking between a “fully open” and a “fully locked” state. The actual degree of locking at any one time is controlled on the basis of a number of factors in a known manner, but the control can be adjusted so that the differentials are “more open” or “more locked”. Specifically the pre-load on the clutch pack can be varied which in turn controls the locking torque, i.e. the torque across the differential that will cause the clutch, and hence the differential, to slip. The front differential could also be controlled in the same way.
Referring to FIG. 4 , all of the subsystem controllers, that is the engine management system 28, the transmission controller 30, the steering controller 48, the brakes controller 62 and the suspension controller 82 are all connected to a vehicle mode controller 98 which controls the configuration modes of operation of each of the subsystem controllers. In one example, the vehicle mode controller 98 stores input regarding driving conditions in its memory and provides the appropriate control commands to each subsystem controller. The subsystems, and each of the functions described above, are controlled so as to provide a number of driving modes for the vehicle. Each of the driving modes corresponds to a particular driving condition or set of driving conditions, and in each driving mode each of the functions is set to the function mode most appropriate to those conditions.
The driving modes are selected by means of a driver input 99 which takes the form of a rotary knob which can be rotated by the driver to select any of the driving modes displayed as being available. As an alternative to this rotary knob a touch screen, or a number of push buttons, one for each driving mode, could be used.
Referring to FIGS. 5 and 6 , the driving modes include three on-road modes, namely a motorway mode, a country road mode and a city driving mode, four off-road modes, namely a grass mode, a sand mode, a boulder or rock crawl mode and a mud mode, and also a rough road mode, a towing mode, which in this case is arranged for towing on-road and can therefore also be considered one of the on-road modes, and an ice mode. The function modes that these vehicle driving modes include are as follows.
When the vehicle mode controller 98 is in “motorway” mode the vehicle functions and subsystem configurations are optimized for traveling at high speeds on flat surfaces with good levels of friction. The suspension ride height is set at “low” for low wind resistance and good stability. The air suspension interconnection is set at “standard” for good stability. The steering assistance is set so that it will be low at high speeds to give a firm steering feel, but will be speed dependent and increase at low vehicle speeds. The brake pedal effort is set at “high” to avoid rapid deceleration at high speed, but with “panic assist” to ensure that the vehicle can be slowed rapidly in an emergency. The A.B.S, E.T.C and D.S.C are all set to “high mu”. The throttle progression is set to the “slow” characteristic because this is actually more responsive to changes in throttle pedal position at higher levels of pedal displacement which will generally be used on a motorway. The transfer box 21 is set to “high range”, the transmission is set to “normal mode” and the center and rear differentials are both “more open”.
When the vehicle mode controller 98 is in “country road” mode the function settings are the same as for the “motorway” mode, except for the suspension ride height and the transmission. The suspension ride height is set to “standard” because reduced wind resistance is less important and the road may be rougher requiring more ground clearance and more suspension bump travel. The transmission is set to “performance” mode, but the driver has the option of selecting “manual” mode. In an alternative in the country road mode, the throttle progression is set to “quick” and the brake effort set to “low” so as to assist the driver with rapid acceleration and braking.
When the vehicle mode controller 98 is in “city driving” mode, the function settings are again the same as for the “motorway” mode except the suspension ride height and the brake pedal effort. The ride height is set to standard and the brake pedal effort is set to low to assist the driver with the rapid and frequent starting and stopping associated with city driving. The transmission is set to use relatively high gears such as by using the “ice” mode so as to reduce the jerkiness of driving, and can even be set to start in second gear rather than first for the same reason. The throttle is set to the “slow” mode, again to reduce jerkiness. The throttle pedal characteristic is also set to high degree of damping, which uses a low-pass filter on the throttle pedal position signal so that if the pedal is moved quickly, the engine torque does not change as quickly. This also helps to reduce jerkiness. In some cases it might be preferred to use the “quick” mode characteristic with a high degree of damping so as to reduce the amount of pedal movement required from the driver, but still minimize jerkiness.
When the vehicle mode controller 98 is in “towing” mode, this is assumed to be on-road towing and therefore many of the functions are again similar to the other on-road modes. Specifically all of the functions are at the same settings as in “motorway” mode, except the suspension ride height, the D.S.C., and the transfer box. The ride height is again set to “standard”. The D.S.C. is operated in a special “towing” mode which is designed to counteract instability brought about by the trailer. The transfer box 21 is in “high range” since towing will generally be carried out on-road. As an alternative to the selection of “high range” the transmission could be operated in a different configuration mode to help the vehicle to manage heavy towed loads. This could be using the “performance” mode which would tend to keep the transmission in lower gears than normal to help with pulling away under heavy loads. In an alternative towing mode the throttle pedal progression is set to “quick” so as to help avoid stalling on pull-away from rest.
When the vehicle mode controller 98 is in “dirt track” mode many of the vehicle functions will need to be in different configuration modes from the on-road modes described above to take account of the fact that the surface is rough, although the vehicle might still be traveling at quite high speeds, so stability is still important. The ride height is set to “standard”. This is a compromise between being higher to give more suspension travel to accommodate the rough surface, and being lower for better stability. The air suspension interconnection is set to “medium” for good stability. However, if it is assumed that the dirt track will be very rough the interconnection could be set to “maximum” to accommodate the rough surface. The steering assistance is set to be speed dependent as in the motorway driving mode. The brake pedal effort is set to “high” to avoid sudden braking resulting from the jolting of the vehicle due to the rough surface. The A.B.S., E.T.C. and D.S.C. are all set to “low mu” because dirt tracks generally have a relatively high amount of loose material on them, and the friction is therefore generally quite low. The throttle progression is set to “slow” to avoid the jolting of the vehicle, and the resulting bouncing of the driver's foot on the accelerator pedal from producing undesired changes in the demanded level of torque. The transfer box 21 is in “high range” because speeds will generally be reasonably high. The transmission is in “normal” configuration mode for the same reason. The differential locks are both set to “more open”.
When the vehicle mode controller 98 is in “ice” mode, the functions are set up to provide maximum stability on a slippery surface. The ride height setting is not critical to this requirement, but is set to “standard” configuration mode for the same reasons as in “dirt track” driving mode. The air suspension interconnection is set to “standard” to give good stability. The steering assistance is set to a low level of assistance because steering tends to become very “light” on ice and reducing the assistance will reduce the tendency of the driver to change the steering angle too much and too quickly. The brake pedal effort is set to “high” to avoid sudden braking which might reduce stability. The A.B.S., E.T.C. and D.S.C. are all set to “low mu” to maintain stability. The throttle progression is set to “slow” to avoid too rapid changes in torque demand which could cause wheel spin. The transfer box 21 is set to high range because speeds might still be relatively high, particularly if the vehicle is being driven on snowy roads. The automatic transmission 20 is set to “ice” mode configuration mode described above. Both of the differentials are set to “more open” for maximum stability.
‘Grass’ driving mode is similar to ‘ice’ driving mode because both are reasonably flat surfaces with low friction. Therefore many of the functions are in similar configuration modes to the “ice” mode. The differences are that the air suspension interconnection is set to “medium” or “maximum” to give better articulation which helps to improve traction, the transfer box 21 is in “low range” because driving speeds will generally be low on grass, and the center differential 22 is set to “more locked” to improve traction, in particular when climbing and descending hills. The rear differential 26 could be closed to improve traction, but this would adversely affect stability under some circumstances. It can therefore be closed at low speeds, but open increasingly as speed increases, for example above a threshold of 15 or 20 kph, to increase stability.
In “sand” driving mode the functions are the same as for “grass” mode configuration modes except the A.B.S., throttle progression and transmission. The A.B.S. is in the “plough surface” mode described above. The throttle progression is set to “quick” and the transmission is in the specifically designed “sand” mode described above. The E.T.C. is also set to the “sand” mode. The differentials are set to a standard setting.
In “boulder” driving mode the vehicle will generally be traveling at very low speeds and the chances of complete loss of traction at one or more wheels is quite high. The suspension is set to “high” to give good ground clearance. The air suspension interconnection is set to “maximum” to give good articulation. The steering assistance is set to high because required steering torques can be high. The A.B.S. is set to “high mu”, although another possibility is to operate the A.B.S. in a de-sensitized mode. In this mode, at least at low speed and when the steering angle is low, i.e. the driver is steering straight, very high levels of slip, or even total wheel lock are allowed. However, as the steering angle increases above a set limit indicating that steering is required, wheel lock is again prevented to improve steering control. The E.T.C. is set to “low mu” because wheel spin is very likely to occur. Another option is to provide a special E.T.C. mode in which the brakes are pre-pressurized either permanently or when high degrees of wheel articulation are detected, to pre-empt the occurrence of wheel spin. The D.S.C. is set to “high mu” because it is unlikely that it will be used. Again, another option here is to disable the D.S.C. function altogether, at least below a relatively low threshold speed of, for example, 10 or 15 kph. The throttle progression is set to “slow” to give the driver the best possible control at low speeds. The transfer box 21 is set to “low range”. The automatic transmission 20 is set to “manual mode” because it is unlikely that the driver will want to change gear at all, and any undesired change of gear might affect the stability of the vehicle. The center and rear differentials are both set to “more locked” to give good traction.
Finally, in “mud” driving mode the functions are set to the same settings as in “grass” driving mode, except for the suspension ride height which is set to “high” to give better clearance over deep mud, and the rear differential 26 which is set to “more locked” to give better traction. The air suspension interlock can also be set to “maximum” in order to maximize traction.
A second embodiment of the invention will now be described. In this embodiment all of the subsystem configurations are substantially the same as in the first embodiment, the second embodiment differing only in the manner in which the subsystems configurations are controlled. Some of the controlled functions described above are not altered by the driving mode selected, and one further function, a hill descent function, is included in the brake controller 62, as will be described in more detail below. The second embodiment will therefore also be described with reference to FIGS. 1 to 4 .
In the second embodiment the functions which are controlled by the vehicle mode controller 98 are the throttle pedal characteristic, the gear changes in the transmission 20, the locking torque of the center and rear differentials 22, 26, the traction control function, the yaw control function provided by the D.S.C. system, the air suspension ride height, the suspension cross linking, and the hill descent control function. The hill descent control defines a target speed and uses the brakes to control the vehicle speed to the target speed as the vehicle descends a hill. The target speed has a default value which is nominally 6 kph, but can be increased by depressing the accelerator pedal 27 and decreased by depressing the brake pedal down to a minimum value of 3 kph. The default target speed can be varied depending on the mode selected. The differential controller 30 is also arranged to receive inputs from the steering angle sensor 49 and the ride height sensors 83, 84, 85, 86, and to vary the locking torque of each of the center and rear differentials 22, 26 in response to those inputs. When high steering angles are detected the locking torque, in particular of the rear differential 26 26, is reduced so as to allow the wheels to rotate at different speeds as is required under cornering. When high levels of suspension articulation, indicated by large differences is ride heights between the wheels, is detected, the locking torque is generally increased as there is an increased likelihood of wheels slipping.
The driving modes which are selectable in the second embodiment are: a standard mode, a grass/gravel/snow mode, a mud/ruts mode, a sand mode, a rock crawl (boulder) mode, and a dynamic mode. The control of the vehicle in each of these modes will now be described.
In the standard driving mode, the configuration modes for the various systems are designed to be a compromise that will be suitable for all conditions. The throttle characteristic, gearbox control, traction control and DSC are set to be suitable for normal on-road driving. Referring to FIG. 7 the throttle characteristic, which relates engine drive torque to throttle pedal depression, is indicated by curve A which provides a steady increase in torque with increasing throttle depression. The differentials are also controlled in a manner suitable for normal on-road driving. Referring to FIG. 8 the differential locking torque is arranged to start at a pre-load level and increase gradually with slip across the differential as shown in curve A. Referring to FIG. 9 , the locking torque is also arranged to increase gradually with suspension articulation as indicated by curve A. The differential controller are also arranged to give a degree of yaw control via the rear differential 26. The HDC system is switched off, the suspension ride height is set to standard ride height and the suspension cross linking is set to its minimum. Referring to FIG. 10 , the traction control is arranged to provide a braking torque to any wheel which is detected as spinning, the torque starting when the spinning reaches a predetermined threshold level, and increasing gradually with increasing wheel spin as indicated by curve A. Referring to FIG. 11 , the D.S.C. system is arranged to provide a steering torque by applying a differential in braking torque between the two sides of the vehicle. This brake steering torque starts when the yaw error rate, which is the difference between the expected yaw rate and the measured yaw rate, reaches a predetermined level and increases with increasing yaw error rate as shown by curve A.
The grass/gravel/snow driving mode is intended for use on grass, gravel and snow and other low friction surfaces into which the wheels of the vehicle will not sink to a significant depth. In this driving mode the throttle characteristic is set to provide a gentle response, that is a low increase in drive torque for any change in throttle pedal position over most of the range of throttle pedal position, as shown by curve B. At high levels of pedal depression the torque increases at a more rapid rate so that the maximum torque can be achieved at full throttled pedal depression. This characteristic is arranged to avoid wheel spin by giving a gentle response within the normal range of throttle pedal positions. The gearbox control is also arranged to avoid wheel spin, and is therefore arranged to change up gears relatively early, i.e. at relatively low throttle pedal depressions and engine speeds, and to change down gears relatively late, i.e. at relatively low engine speeds. The differentials are arranged to have an increased locking torque generally, compared to the standard driving mode, as shown by curve B in FIG. 8 , so as to reduce the amount of wheel spin which is more likely to occur on low friction surfaces. The differential controller 30 is also arranged to respond more rapidly to detected slipping of the differentials, increasing the locking torque more rapidly in response to detected slip of the differentials than in the standard mode. The response of the differentials to suspension articulation is the same as in standard mode. The traction control is arranged to respond more quickly to wheel spin, as shown by curve B in FIG. 10 , by braking spinning wheels more rapidly and therefore allowing less spin than in the standard mode. The braking starts at lower levels of spin and increases more rapidly with increasing spin, compared to the standard mode. The engine intervention within the traction control is switched on so as to further reduce the likelihood of wheel spin. The D.S.C. system is set up as for the standard mode. The hill descent control function is switched on with a low default target speed of, for example, 3 or 4 kph to improve control of the vehicle when descending hills in slippery conditions. The suspension ride height is set to standard, and the suspension cross linking is set to standard since on these surfaces high degrees of articulation are not expected. Alternatively the cross linking could be set to medium or even maximum to improve traction, provided the cut-out speed at which the interconnection is closed is low to avoid loss of stability.
In the mud/ruts driving mode, the throttle characteristic, gearbox control, differential control and stability control are the same is in grass/gravel/snow driving mode. The traction control is also the same except that the engine intervention is switched off, or at least minimized. The differential control is the same as for grass/gravel/sand driving mode, but the sensitivity of the control to changes in steering angle is reduced since the relatively small amount of wheel slip that will result from cornering is less likely to cause a loss of traction than is the spinning of one of the wheels due to a loss of grip. Specifically referring to FIG. 12 , the differential control includes a turning factor which starts to decrease the locking torque when the steering angle increases above 120° and reduces the locking torque to zero when the steering angle reaches 200°. This is to prevent the differentials from inhibiting cornering. In the mud/ruts driving mode the reduction in locking torque in response to turning is reduced because maintaining traction takes a higher priority than accurate steering under those conditions. The D.S.C. system is de-sensitized as shown by curve B in FIG. 11 . The hill descent control is switched on with the standard default target speed of 6 kph to provide maximum control on hills, the suspension ride height is set to the high setting so as to increase ground clearance, which is desirable in deep mud and ruts, and the suspension cross linking is set to the maximum setting to maximize traction.
In the sand driving mode, the subsystem configuration modes are set up for driving on sand, and in particular to provide the best traction on sand. The throttle characteristic is as shown by curve C in FIG. 7 , and is arranged to be relatively gentle at low degrees of throttle pedal depression so as to reduce the chances of wheel spin at low speeds. Therefore at low degrees of pedal depression the torque produced is lower, for any given pedal position, than in the standard mode. However at high degrees of throttle pedal progression the drive torque demand increase more rapidly with throttle pedal depression so as to produce more power more quickly than in the standard mode. Therefore at high degrees of throttle pedal depression the torque produced for any given pedal position is higher than in the standard mode. Similarly the transmission control operates in the sand mode described above in the first embodiment. The differential control is the same as in the mud/ruts mode, again having a low sensitivity to steering angle for the same reason. The traction control system is set up to allow higher levels of wheel spin than in the standard mode as shown by curve C in FIG. 10 . As an alternative to this the traction control may use a special sand mode configuration as described above for the first embodiment in which wheel spin is kept very low at low vehicle speeds, but is allowed to increase to relatively high levels at higher vehicle speeds. The engine intervention is switched off to prevent undesirable reductions in drive torque. The D.S.C. system is set to a low sensitivity as shown by curve C in FIG. 11 , brake steer torque being introduced only at high levels of yaw rate error and increasing slowly with increasing yaw rate error. As an alternative the D.S.C. system can be turned off altogether in sand mode. The hill descent control is switched off because sand generally provides a high degree of drag and the vehicle either needs to be driven positively down a hill rather than braked, or, if braking is required, engine braking is generally sufficient. The suspension ride height is set to standard height and the suspension cross linking is set to minimum.
In the rock crawl driving mode the throttle characteristic is set, as in grass/gravel/snow and mud/ruts driving modes, to follow curve B in FIG. 7 , i.e. to be relatively insensitive to changes in throttle pedal position over the range of positions usually used. Gearbox control is also set up as for grass/gravel/snow and mud/ruts driving modes. The differentials are set up to follow curve B in FIG. 8 , i.e. to have a higher starting locking torque than in grass/gravel/snow and mud/ruts driving modes, and to increase the locking torque more rapidly in response to differences in wheel speeds between the vehicles wheels, as measured by slip across the differentials. The response of the differential control to suspension articulation is also increased as shown by curve B in FIG. 9 , with the rate of change of locking torque with increasing articulation being higher than in the standard mode. The traction control and D.S.C. are set up as in the mud/ruts mode, the traction control following curve B in FIG. 10 to provide an increased sensitivity to wheel spin, and the D.S.C. following curve B in FIG. 11 to provide a decreased sensitivity to yaw rate error. The hill descent control is switched on with a low default target speed of, for example 3 kph, the suspension ride height is set to high to give best ground clearance and the suspension cross linking is set to maximum to allow maximum suspension articulation.
As an alternative, an improved rock crawl driving mode may be included in which the subsystem configuration modes are selected to achieve and maintain the requested vehicle speed. The engine controller 28 in the form of an engine management system controls operation of the engine 18 so as to control its speed and output power and torque in response to driver inputs. The driver inputs may be in the form of the traditional cruise control switches, or preferably via the accelerator pedal. The engine controller 28 will operate as a torque controller and will determine the error between actual road speed and the requested road speed demanded by the driver. This error will then be managed by the engine controller 28. One alternative for managing the error would consist of a proportional, integral and differential term strategy. The engine controller 28 will be optimized to enable the requested road speed to be achieved and maintained, using up to maximum available torque while providing comfort and predictability to the driver. As shown in FIG. 7 , the accelerator pedal will allow large throttle movement resulting in small requested changes in road speed. This will help to alleviate the movement of the driver's foot caused by the sometimes-violent movement of the vehicle over rough terrain. As the accelerator pedal moves toward full travel, it may transfer from a vehicle speed controller to a torque controller, to enable the driver to accelerate at a higher rate. AT zero pedal position, the road speed request will be zero to provide maximum engine braking and idle.
The improved rock crawl mode may also include an improved Hill Descent control system. In the event in which the brakes are used to control road speed where maximum engine braking has been reached but the road speed is still higher than the requested driver input speed, the hill descent control would control to a specific road speed or zero road speed if the throttle were closed.
Finally, a dynamic driving mode is included which is intended for more sporty driving. In this mode the throttle pedal characteristic follows curve D in FIG. 7 , being arranged to produce the most engine torque for any given throttle pedal position, and the most rapid increase in engine torque in response to throttle pedal depression, over the lower range of throttle pedal depressions. The gearbox control is also arranged to keep the gearbox in lower gear then in the standard mode, with the changes up being delayed when the vehicle is accelerating and changes down being made early when the vehicle is slowing, so as to give the best acceleration and the most engine braking on deceleration. The traction control and D.S.C and differentials are set to the same settings as in standard driving mode, the suspension is set to its lowest ride height, and the hill descent control is turned off.
Referring to FIG. 13 , in a third embodiment of the invention the driving mode in which the vehicle operates is determined by two separate inputs. One input, a rotary terrain knob 100, allows the user to input the type of terrain over which the vehicle is being driven. The other input, a rotary “mode of use” knob 102 allows the user to input the mode in which the vehicle is to be used. This can include vehicle modes relating to the manner in which the vehicle is to respond to the driver's inputs, such as a sport mode or an economy mode, as well as modes relating to the state of the vehicle, such as a towing mode suitable for towing a trailer, and a laden mode for when the vehicle is carrying a particularly heavy load. In this example the vehicle “mode of use” knob allows selection of normal, sport, and towing vehicle driving modes. The sport driving mode is adapted for use when the vehicle is being driven in a “sporty” manner, characterized for example by one or more of: rapid acceleration and braking, high cornering speeds, high engine speeds and relatively low gears for any given vehicle speed.
The terrain selection input allows the selection of standard, grass/gravel/snow, mud/ruts, sand, and rocks driving modes as in the second embodiment. When the “mode of use” input is set to normal the operating modes of the vehicle correspond to the driving modes in the second embodiment. If the mode-of-use input is turned to towing mode, then each of the terrain modes selected is modified to make the vehicle more effective at towing. For example, the suspension ride height is locked, or changes in height restricted, so as to avoid tilting the trailer, and the throttle map and gear change map are modified so as to provide a high level of torque when pulling away from rest. When the sport mode-of-use is selected, the subsystem configuration modes are controlled so as to provide a sporty driving feel: the suspension is lowered, the throttle map and gear change maps are modified to provide rapid acceleration and high levels of engine braking.
In some terrains, one or more of the mode-of-use selections may be inappropriate and selection of those modes-of-use may not result in modification of the vehicle control when those terrains are selected. For example the sport mode-of-use may not be selectable, or may have no effect on the vehicle, of selected in combination with rock crawl, mud/ruts or grass/gravel/snow. Towing is, however, selectable with all terrain selections.
Referring to FIG. 14 a vehicle according to a fourth embodiment of the invention has a powertrain similar to that of the first embodiment and shown in FIG. 1 , and corresponding parts are indicated by the same reference numeral increased by 100. The difference between this embodiment and the first is that the center differential is replaced by a power take off system 122 which includes a direct coupling 122a between the transfer box 121 and the front differential 124, and a clutch mechanism 122b which can be controlled by the powertrain controller 130 to redirect drive torque to the rear differential 126 and hence to the rear wheels 113 114. Under normal driving conditions the clutch mechanism 122b allows substantially all of the driving torque to be transmitted directly to the front wheels via the front differential 124. However, if the front wheels start to slip, as detected for example by wheel speed sensors, then the clutch mechanism 122b is operated to direct drive torque to the rear wheels 113, 114 via the rear differential 126. The proportion of the drive torque which is re-directed to the rear differential 126 is controlled so as to reduce the amount of slip at the front wheels to an acceptable level. The clutch 122b is set to a pre-load which is variable, and the clutch load is then increased in response to detected slip of the front wheels 111, 112. In situations where good traction is required, a high pre-load and high sensitivity to slip are desirable. For good dynamic performance a low re-load is desirable and sensitivity to slip is less important. For on-road driving, low pre-load and sensitivity are provided, and for off-road driving a higher pre-load and higher sensitivity are provided. If a sand mode is provided the degree of slip is set to be low at low speeds and higher at higher speeds in a similar manner to the traction control system.
Referring to FIG. 15 , the fourth embodiment also includes, as well as springs 176 in its suspension system, dampers 177 arranged to damp vertical movement of the wheels 111 relative to the vehicle's body 115. The dampers 177, only one of which is shown, are electrically controlled, having a variable damping rate, which is variable between a high level, where relatively high resistance is provided to vertical wheel travel, and a lower rate at which less resistance is provided. The damping of each of the dampers 177 is controlled by the suspension controller 182. The damping can be controlled in response to a number of parameters such as vehicle speed and steering angle to improve ride and handling. The amount of damping is also varied depending on which mode is selected. In on-road modes a high degree of damping is generally provided to give good handling, and in off-road modes lower damping is provided to give good traction.
In this fourth embodiment, the vehicle mode controller 98 uses information passed on from the various subsystem controllers relating to the nature of the surface over which the vehicle is traveling, the manner in which the vehicle is being driven, and the way in which the vehicle is being used, to select an appropriate mode automatically. For example, the wheel speed sensors and ride height sensor are used to classify the nature of the surface as on-road or off-road, high friction or low friction, etc. The powertrain controller 130 and steering angle sensor 49 are used to classify the driving style as normal or sporty. It is also possible to determine from the various sensors whether the vehicle is heavily laden.
The automatic mode selection can either be the sole means of selecting modes, giving the driver no input to the mode selection process. Alternatively it may be advisory, with the driving having the option to override the automatic selection of mode. In a further alternative the driver may have the primary control over the selection of the driving mode, with the vehicle mode controller 98 over-riding the driver's selection if the driving conditions or driving style of the driver make the driver's selection unsafe.
It will be appreciated that the number of available modes can be varied depending on the requirements for a particular vehicle. For example in the simplest case, it might be that only two modes were required, which might be the standard mode which would be suitable for “on-road” driving and the rock crawl mode which would be suitable for “off-road driving”. Alternatively, there could be one on-road mode and two off-road modes, for example the rock crawl mode and the grass/gravel/snow mode.
Having thus described the invention of the present application in detail and by reference to preferred embodiments thereof, it will be apparent that modifications and variations are possible without departing from the scope of the invention defined in the appended claims.
Claims (58)
1. A vehicle control system having a driver input for selecting a driving surface, the vehicle control system arranged to control a plurality of vehicle subsystems each of which is operable in a plurality of subsystem configuration modes, wherein the vehicle control system is operable in a plurality of driving modes in each of which it is arranged to select the subsystem configuration modes in a manner suitable for a respective driving surface.
2. A vehicle control system according to claim 1 , wherein the driving modes comprise a plurality of different driving modes suitable for different conditions of the vehicle.
3. A vehicle control system according to claim 1 wherein the driving modes include an off-road mode in which the subsystem configurations are controlled in a manner suitable for driving on rough terrain and an on-road mode in which the subsystem configurations are controlled in a manner suitable for driving on-road.
4. A vehicle control system according to claim 1 wherein the driving modes include at least one low friction mode in which the subsystem configurations are controlled in a manner suitable for driving on low friction surfaces and a high friction mode in which the subsystem configurations are controlled in a manner suitable for driving on high friction surfaces.
5. A vehicle control system according to claim 4 wherein the low friction mode is arranged to be suitable for driving on grass, gravel and snow.
6. A vehicle control system according to claim 1 wherein the driving modes are selectable by a driver of the vehicle.
7. A vehicle control system according to claim 6 wherein the driving modes are selectable by means of two inputs, one of which is a terrain selection input arranged to influence the configuration mode selected on the basis of the terrain selected, and the other which is a mode of use input arranged to influence the configuration mode selected on the basis of a selected mode of use of the vehicle.
8. A vehicle control system according to claim 6 wherein the mode of use input is arranged to allow selection between a plurality of driving styles.
9. A vehicle control system according to claim 8 wherein the driving style includes a sport style.
10. A vehicle control system according to claim 1 further comprising sensing means arranged to sense at least one parameter wherein the control system is arranged to select said driving modes on the basis of said parameter.
11. A vehicle control system according to claim 10 wherein the parameter varies with the manner in which the vehicle is being used.
12. A vehicle control system according to any one of claims 1 -11 in which the vehicle control system is further included in a motor vehicle.
13. A vehicle control system according to claim 1 further comprising a driver input for selecting a mode of use.
14. A method of controlling a plurality of subsystems within a motor vehicle in a manner suitable for a respective driving surface, the subsystems each being operable in a plurality of subsystem configuration modes, the method comprising the steps of:
connecting a vehicle mode controller to the vehicle subsystems, the vehicle mode controller having a plurality of driving modes and a driver input for selecting a driving surface;
storing a set of control commands from the plurality of driving modes in a memory of the vehicle mode controller in response to the driver input of a driving surface;
transmitting the set of stored control commands to each of the plurality of vehicle subsystems; and
selecting of a set of subsystem control parameters by each of the plurality of vehicle subsystems so as to provide the appropriate operation of each of the vehicle subsystems.
15. The method claimed in claim 14 , wherein at least one of the driving modes is a rock crawl mode.
16. A method of controlling a plurality of subsystems within a motor vehicle in a manner suitable for a respective driving surface, the subsystems each being operable in a plurality of subsystem configuration modes, the method comprising the steps of:
connecting a vehicle mode controller to the vehicle subsystems, the vehicle mode controller having a plurality of driving modes, a driver input for selecting a driving surface, and a plurality of subsystem sensor information;
storing a set of control commands from the plurality of driving modes in a memory of the vehicle mode controller in response to the plurality of subsystem sensor information and the driver input of the driving surface;
transmitting the set of stored control commands to each of the plurality of vehicle subsystems; and
selecting of a set of subsystem control parameters by each of the plurality of vehicle subsystems so as to provide the appropriate operation of each of the vehicle subsystems.
17. A computer program product comprising a medium on which or in which, when executed in a computer system, will perform the method as in any one of claims 14 -16 .
18. A vehicle control system having a driver input for selecting a surface terrain, the vehicle control system arranged to control a plurality of vehicle subsystems each of which is operable in a plurality of subsystem configuration modes, wherein the vehicle control system is operable in a plurality of driving modes in each of which it is arranged to select the subsystem configuration modes in a manner suitable for a respective surface terrain.
19. A vehicle control system according to claim 18 , wherein one of the plurality of vehicle subsystems is a suspension subsystem.
20. A vehicle control system according to claim 19 , wherein the plurality of vehicle subsystems further comprise a steering subsystem, a brake subsystem, an engine management subsystem, and a transmission subsystem.
21. A vehicle comprising a vehicle control system having a driver input device for selecting a driving surface, the vehicle control system arranged to control a plurality of vehicle subsystems each of which is operable in a plurality of subsystem configuration modes, wherein the vehicle control system is operable in a plurality of driving modes in each of which it is arranged to select the subsystem configuration modes in a manner suitable for a respective driving surface, and further wherein the plurality of driving modes includes at least two off-road modes in which the subsystem configurations are controlled in a manner suitable for driving on respective off-road driving surfaces, and still further wherein one of the off-road modes is a mode in which the subsystems are controlled in a manner suitable for driving on rocks and/or boulders.
22. A vehicle as claimed in claim 21, wherein one of the vehicle subsystems is a brake subsystem and wherein, in the mode suitable for driving on rocks and/or boulders, the subsystem configuration modes are arranged such that when the steering angle is below a predetermined threshold, higher levels of wheel slip are permitted than when the steering angle is above the predetermined threshold and/or total wheel lock is permitted.
23. A vehicle as claimed in claim 21, wherein one of the vehicle subsystems is a brake subsystem and wherein, in the mode suitable for driving on rocks and/or boulders, the subsystem configuration modes are arranged such that the brakes are pre-pressurized either permanently or in dependence on detection of wheel articulation.
24. A vehicle control system having a driver input device for selecting a driving surface, the vehicle control system arranged to control a plurality of vehicle subsystems each of which is operable in a plurality of subsystem configuration modes, wherein the vehicle control system is operable in a plurality of driving modes in each of which it is arranged to select the subsystem configuration modes in a manner suitable for a respective driving surface, wherein one of the plurality of vehicle subsystems is a suspension subsystem and said plurality of subsystem configuration modes comprises a plurality of ride heights;
wherein one of the plurality of vehicle subsystems is a powertrain system which includes a powertrain control means and a throttle pedal, the subsystem configuration modes providing different levels of responsiveness of the powertrain control means to movement of the throttle pedal;
wherein one of the plurality of vehicle subsystems is a steering system which can provide steering assistance, and said plurality of subsystem configuration modes provides different levels of steering assistance; and
wherein one of the plurality of vehicle subsystems is a transmission system operable in a plurality of transmission ratios and including a transmission control means arranged to monitor at least one parameter of the vehicle and to select the transmission ratios in response, and wherein the subsystem configuration modes include a plurality of transmission configuration modes in which the transmission ratios are selected differently in response to said at least one parameter.
25. A vehicle comprising a vehicle control system having a driver input device for selecting a driving surface, the vehicle control system arranged to control a plurality of vehicle subsystems each of which is operable in a plurality of subsystem configuration modes, wherein the vehicle control system is operable in a plurality of driving modes in each of which it is arranged to select the subsystem configuration modes in a manner suitable for a respective driving surface, and further wherein the plurality of driving modes includes at least two off-road modes in which the subsystem configurations are controlled in a manner suitable for driving on respective off-road driving surfaces, and an on-road mode in which the subsystem configurations are controlled in a manner suitable for driving on-road, and still further wherein the subsystem configuration modes are arranged such that the vehicle adopts a higher ride height in dependence on selection of the second off-road mode than for the first off-road mode, and yet still further wherein one of the plurality of vehicle subsystems is a transmission system operable in a plurality of transmission ratios and including a transmission control means arranged to monitor at least one parameter of the vehicle and to select the transmission ratios in response, and wherein the subsystem configuration modes include a plurality of transmission configuration modes in which the transmission ratios are selected differently in response to said at least one parameter.
26. A vehicle as claimed in claim 25, wherein the subsystem configuration modes are arranged such that in the second off-road mode, the transmission is kept in a higher gear than in the on-road mode at low vehicle speeds but uses lower gears than in the on-road mode at higher vehicle speeds.
27. A vehicle as claimed in claim 21, wherein one of the vehicle subsystems is a steering subsystem which can provide steering assistance, and wherein, in the mode suitable for driving on rocks and/or boulders, the steering subsystem is set to provide a high level of steering assistance relative to the on-road mode and/or the other off-road mode.
28. A vehicle as claimed in claim 21, wherein one of the vehicle subsystems is a brake subsystem, and wherein, in the mode suitable for driving on rocks and/or boulders, the brake subsystem is arranged to require low brake pedal effort relative to the on-road mode and/or the other off-road mode.
29. A vehicle as claimed in claim 21, wherein one of the vehicle subsystems is a transfer box, and wherein, in the mode suitable for driving on rocks and/or boulders, the transfer box is set to low range.
30. A vehicle as claimed in claim 29, wherein one of the vehicle subsystems is an automatic transmission, and wherein, in the mode suitable for driving on rocks and/or boulders, the automatic transmission is set to a manual mode.
31. A vehicle as claimed in claim 30, wherein one of the vehicle subsystems is an air suspension system, and wherein, in the mode suitable for driving on rocks and/or boulders, the suspension is set to a high ride height relative to the on-road mode and/or other off-road mode.
32. A vehicle as claimed in claim 21, wherein one of the vehicle subsystems is an electronic traction control system, and wherein, in the mode suitable for driving on rocks and/or boulders, the electronic traction control subsystem is set to low mu.
33. A vehicle as claimed in claim 21, wherein one of the vehicle subsystems is an electronic traction control system and another one of the vehicle subsystems is a brake subsystem, and wherein, in the mode suitable for driving on rocks and/or boulders, the brakes are pre-pressurized in dependence on detection of wheel articulation.
34. A vehicle control system having a driver input device for selecting a driving surface, the vehicle control system arranged to control a plurality of vehicle subsystems each of which is operable in a plurality of subsystem configuration modes, wherein the vehicle control system is operable in a plurality of driving modes in each of which it is arranged to select the subsystem configuration modes in a manner suitable for a respective driving surface, and further wherein the plurality of driving modes includes at least two off-road modes in which the subsystem configurations are controlled in a manner suitable for driving on respective off-road driving surfaces, and an on-road mode in which the subsystem configurations are controlled in a manner suitable for driving on-road, and still further wherein one of the off-road modes is a sand mode in which the vehicle subsystems are controlled in a manner suitable for driving on sand, wherein one of the vehicle subsystems is a brake subsystem and wherein, in the sand mode, the brake subsystem is arranged to allow a high degree of wheel slip under braking relative to the on-road mode and/or a second off-road mode.
35. A vehicle control system having a driver input device for selecting a driving surface, the vehicle control system arranged to control a plurality of vehicle subsystems each of which is operable in a plurality of subsystem configuration modes, wherein the vehicle control system is operable in a plurality of driving modes in each of which it is arranged to select the subsystem configuration modes in a manner suitable for a respective driving surface, wherein the system comprises a plurality of subsystem sensors and wherein the system is operable in an automatic selection mode in which one of the plurality of driving modes is selected automatically in dependence on subsystem sensor information.
36. A vehicle control system according to claim 35, wherein the plurality of subsystem sensors comprises one or more of a wheel speed sensor, a ride height sensor and a steering angle sensor.
37. A vehicle control system having a driver input device for selecting a driving surface, the vehicle control system arranged to control a plurality of vehicle subsystems each of which is operable in a plurality of subsystem configuration modes, wherein the vehicle control system is operable in a plurality of driving modes in each of which it is arranged to select the subsystem configuration modes in a manner suitable for a respective driving surface, wherein the system comprises a plurality of subsystem sensors and wherein the system is operable to determine an appropriate driving mode from the plurality of driving modes for the current driving conditions and to output advice to the driver relating to the determined driving mode.
38. A vehicle control system having a driver input device for selecting a driving mode, the vehicle control system arranged to control a plurality of vehicle subsystems each of which is operable in a plurality of subsystem configuration modes, wherein the vehicle control system is operable in a plurality of driving modes in each of which it is arranged to select the subsystem configuration modes in a manner suitable for a respective driving surface, wherein one of the plurality of vehicle subsystems is a suspension subsystem and said plurality of subsystem configuration modes comprises a plurality of ride heights; and
wherein one of the plurality of vehicle subsystems is a powertrain system which includes a powertrain control means and a throttle pedal, the subsystem configuration modes providing different levels of responsiveness of the powertrain control means to movement of the throttle pedal.
39. A vehicle control system according to claim 38, wherein one of the subsystems comprises a traction control system which is arranged to control wheel spin, and said plurality of subsystem configuration modes allow different levels of said wheel spin.
40. A vehicle control system according to claim 38, wherein one of the plurality of vehicle subsystems is a steering system which can provide steering assistance, and said plurality of subsystem configuration modes provides different levels of steering assistance.
41. A vehicle control system according to claim 38, wherein one of the plurality of vehicle subsystems is a transmission system operable in a plurality of transmission ratios and including a transmission control means arranged to monitor at least one parameter of the vehicle and to select the transmission ratios in response, and wherein the subsystem configuration modes include a plurality of transmission configuration modes in which the transmission ratios are selected differently in response to said at least one parameter.
42. A vehicle control system according to claim 38, wherein one of the subsystems is a brake system which can provide an anti-lock function to control wheel slip, and said plurality of subsystem configuration modes allow different levels of said wheel slip.
43. A vehicle control system according to claim 38, wherein the plurality of driving modes includes at least two on-road modes in which the subsystem configurations are controlled in a manner suitable for driving on-road.
44. A vehicle control system according to claim 43, wherein one of the on-road modes is a dynamic mode or a sport mode.
45. A vehicle control system according to claim 44 where one of the on-road modes is a standard mode or a default mode.
46. A vehicle control system according to claim 44 where one of the on-road modes is an economy mode.
47. A vehicle control system according to claim 44 wherein one of the on-road modes is a motorway mode or a country road mode.
48. A vehicle control system according to claim 38 wherein the plurality of driving modes includes an off-road mode in which the subsystem configurations are controlled in a manner suitable for driving on grass, or an off-road mode in which the subsystem configurations are controlled in a manner suitable for driving on gravel, or an off-road mode in which the subsystem configurations are controlled in a manner suitable for driving on snow, or an off-road mode in which the subsystem configurations are controlled in a manner suitable for driving on rocks, or an off-road mode in which the subsystem configurations are controlled in a manner suitable for driving on sand or an off-road mode in which the subsystem configurations are controlled in a manner suitable for driving on mud.
49. A vehicle control system according to claim 43, wherein the plurality of driving modes includes an off-road mode in which the subsystem configurations are controlled in a manner suitable for driving on gravel and wherein, in the off-road mode suitable for driving on gravel, the powertrain system is arranged to provide lower levels of drive torque, for a given throttle pedal position, than in at least one of the on-road modes.
50. A vehicle control system according to claim 43, wherein the plurality of driving modes includes an off-road mode in which the subsystem configurations are controlled in a manner suitable for driving on gravel and wherein, in the off-road mode suitable for driving on gravel, the suspension system is arranged to provide a higher ride height than in at least one of the on-road modes.
51. A vehicle control system according to claim 50, wherein, in the off-road mode suitable for driving on gravel, the powertrain system is arranged to provide lower levels of drive torque, for a given throttle pedal position, than in at least one of the on-road modes.
52. A vehicle control system according to claim 38, wherein the driving modes are selectable by means of two separate driver input devices.
53. A vehicle control system according to claim 52, wherein one of the driver input devices is a terrain selection input arranged to select the driving mode on the basis of the terrain selected and the other driver input device is a mode of use input.
54. A vehicle control system according to claim 53, wherein the plurality of driving modes includes at least two on-road modes in which the subsystem configurations are controlled in a manner suitable for driving on-road, wherein at least one of the on-road modes is a sport mode or an economy mode selectable by the mode of use input.
55. A vehicle control system according to claim 53, wherein the plurality of driving modes includes at least one off-road mode in which the subsystem configurations are controlled in a manner suitable for driving on at least one of grass, gravel, snow, rocks, sand or mud, wherein the at least one off-road mode is selectable by the terrain selection input.
56. A vehicle control system according to claim 55, wherein the plurality of driving modes includes at least two on-road modes in which the subsystem configurations are controlled in a manner suitable for driving on-road, wherein at least one of the on-road modes is a sport mode or an economy mode selectable by the mode of use input.
57. A vehicle control system having a driver input device for selecting a driving mode, the vehicle control system arranged to control a plurality of vehicle subsystems each of which is operable in a plurality of subsystem configuration modes, wherein the vehicle control system is operable in a plurality of driving modes in each of which it is arranged to select the subsystem configuration modes in a manner suitable for a respective driving surface, wherein one of the plurality of vehicle subsystems is a suspension subsystem and said plurality of subsystem configuration modes comprises a plurality of ride heights; and
wherein one of the plurality of vehicle subsystems is a powertrain system which includes an engine and a throttle pedal, the subsystem configuration modes providing different amounts of torque from the engine for a given throttle pedal position.
58. A vehicle comprising a vehicle control system according to any one of claims 24, 34, 35, 37, 38 and 57.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/949,385 USRE49258E1 (en) | 2002-04-18 | 2018-04-10 | Vehicle control |
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GBGB0208877.1A GB0208877D0 (en) | 2002-04-18 | 2002-04-18 | Behicle control |
| GB0208877 | 2002-04-18 | ||
| GBGB0229951.9A GB0229951D0 (en) | 2002-04-18 | 2002-12-20 | Vehicle control |
| GB0229951 | 2002-12-20 | ||
| US10/249,551 US7349776B2 (en) | 2002-04-18 | 2003-04-17 | Vehicle control |
| US15/277,516 USRE46828E1 (en) | 2002-04-18 | 2016-09-27 | Vehicle control |
| US15/949,385 USRE49258E1 (en) | 2002-04-18 | 2018-04-10 | Vehicle control |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US10/249,551 Reissue US7349776B2 (en) | 2002-04-18 | 2003-04-17 | Vehicle control |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| USRE49258E1 true USRE49258E1 (en) | 2022-10-25 |
Family
ID=28676507
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US10/249,551 Ceased US7349776B2 (en) | 2002-04-18 | 2003-04-17 | Vehicle control |
| US15/949,385 Expired - Lifetime USRE49258E1 (en) | 2002-04-18 | 2018-04-10 | Vehicle control |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US10/249,551 Ceased US7349776B2 (en) | 2002-04-18 | 2003-04-17 | Vehicle control |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US7349776B2 (en) |
| EP (1) | EP1355209A1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220340136A1 (en) * | 2021-04-26 | 2022-10-27 | Mazda Motor Corporation | Travel mode switching device for vehicle and display unit of the same |
| US20230382409A1 (en) * | 2022-05-27 | 2023-11-30 | Hyundai Motor Company | System for enabling a vehicle to perform a circuit mode |
Families Citing this family (255)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6879898B2 (en) * | 2003-01-03 | 2005-04-12 | General Motors Corporation | Method and apparatus for vehicle integrated chassis control system |
| US7765043B2 (en) * | 2003-05-12 | 2010-07-27 | Toyota Jidosha Kabushiki Kaisha | Power supply control apparatus and method |
| GB0314236D0 (en) | 2003-06-19 | 2003-07-23 | Ford Global Tech Llc | Improved method of vehicle control |
| US6874383B2 (en) * | 2003-06-23 | 2005-04-05 | Zf Meritor, Llc | Adaptive shift sequencing |
| JP4145741B2 (en) * | 2003-07-03 | 2008-09-03 | 三菱電機株式会社 | Vehicle rollover discrimination device and vehicle rollover discrimination method |
| US7004870B2 (en) * | 2004-02-25 | 2006-02-28 | Dana Corporation | Integrated torque and roll control system |
| JP4161923B2 (en) * | 2004-03-09 | 2008-10-08 | 株式会社デンソー | Vehicle stabilization control system |
| US7207409B2 (en) | 2004-03-10 | 2007-04-24 | American Axle & Manufacturing, Inc. | Two speed all wheel drive system |
| US8380416B2 (en) * | 2004-03-18 | 2013-02-19 | Ford Global Technologies | Method and apparatus for controlling brake-steer in an automotive vehicle in reverse |
| GB2412448B (en) * | 2004-03-22 | 2008-05-28 | Ford Global Tech Llc | Powertrain control systems |
| DE102004015311B4 (en) * | 2004-03-30 | 2024-04-25 | Robert Bosch Gmbh | Adaptation of a vehicle stabilization system to the road surface |
| JP2005297622A (en) | 2004-04-07 | 2005-10-27 | Toyoda Mach Works Ltd | Steering system |
| US7021723B1 (en) * | 2004-04-23 | 2006-04-04 | Thomas Neil Kaufman | Operating system for towed vehicle electric brakes |
| JP4549738B2 (en) * | 2004-05-27 | 2010-09-22 | 株式会社日立製作所 | Vehicle control system, control system, and control method |
| DE112005001350A5 (en) * | 2004-06-25 | 2008-07-03 | Continental Teves Ag & Co. Ohg | Method and device for stabilizing a vehicle |
| DE102004040829B4 (en) * | 2004-08-24 | 2013-09-12 | Daimler Ag | Operating device for motor vehicles |
| US7743606B2 (en) | 2004-11-18 | 2010-06-29 | Honeywell International Inc. | Exhaust catalyst system |
| US7467614B2 (en) | 2004-12-29 | 2008-12-23 | Honeywell International Inc. | Pedal position and/or pedal change rate for use in control of an engine |
| US20060212205A1 (en) * | 2005-03-15 | 2006-09-21 | Continental Teves, Inc. | Method for detecting when a vehicle is in a downhill situation |
| US7752840B2 (en) | 2005-03-24 | 2010-07-13 | Honeywell International Inc. | Engine exhaust heat exchanger |
| JP4797426B2 (en) * | 2005-04-14 | 2011-10-19 | トヨタ自動車株式会社 | Four-wheel drive vehicle |
| SE0501432L (en) * | 2005-06-17 | 2006-12-18 | Volvo Lastvagnar Ab | Height control system for a vehicle |
| DE102006023575A1 (en) * | 2005-07-18 | 2007-02-01 | Daimlerchrysler Ag | Device for internal combustion engine / powertrain control for a motor vehicle |
| DE102005036924A1 (en) * | 2005-08-05 | 2007-02-08 | Bayerische Motoren Werke Ag | Driver assistance system for a motor vehicle |
| US7389773B2 (en) | 2005-08-18 | 2008-06-24 | Honeywell International Inc. | Emissions sensors for fuel control in engines |
| US7765792B2 (en) | 2005-10-21 | 2010-08-03 | Honeywell International Inc. | System for particulate matter sensor signal processing |
| US7533322B2 (en) * | 2005-11-03 | 2009-05-12 | Gm Global Technology Operations, Inc. | Method and system for performing function-specific memory checks within a vehicle-based control system |
| US7445079B2 (en) * | 2005-11-21 | 2008-11-04 | Gm Global Technology Operations, Inc. | Automatic calibration of vehicle transmission using load sensing |
| JP2009530166A (en) | 2006-03-22 | 2009-08-27 | ジーエム グローバル テクノロジー オペレーションズ,インク. | Driving style sensitive vehicle subsystem control method and apparatus |
| EP2015945A4 (en) * | 2006-05-09 | 2010-02-24 | Lockheed Corp | Mobility traction control system and method |
| US7577508B2 (en) | 2006-05-09 | 2009-08-18 | Lockheed Martin Corporation | Mobility traction control system and method |
| DE102006022692B4 (en) * | 2006-05-16 | 2008-07-10 | Volkswagen Ag | Device and method for activating and deactivating functions of a vehicle |
| DE102006054703A1 (en) * | 2006-06-27 | 2008-01-03 | Robert Bosch Gmbh | Method and control unit for detecting trailer operation in a towing vehicle |
| US7287760B1 (en) | 2006-08-21 | 2007-10-30 | Bfs Diversified Products, Llc | Vehicle suspension system and method |
| DE102006049727A1 (en) | 2006-10-21 | 2008-04-24 | Bayerische Motoren Werke Ag | Operating concept for setting different driving dynamics characteristics on a motor vehicle |
| FR2909065B1 (en) * | 2006-11-27 | 2009-07-10 | Peugeot Citroen Automobiles Sa | STEERING DEVICE FOR IMPROVING THE POWER OF A VEHICLE. |
| WO2008092003A2 (en) * | 2007-01-25 | 2008-07-31 | Honda Motor Co., Ltd. | Vehicle systems control for improving stability |
| DE102007032969A1 (en) * | 2007-07-16 | 2009-01-29 | Knorr-Bremse Systeme für Nutzfahrzeuge GmbH | Apparatus for anticipating coasting phases of a vehicle |
| DE102007036402A1 (en) * | 2007-07-27 | 2009-02-19 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Method for operating an electric machine, control unit and vehicle |
| US8900086B2 (en) * | 2007-08-02 | 2014-12-02 | Honda Motor Co., Ltd. | Hydraulic vehicle clutch system, drivetrain for a vehicle including same, and method |
| JP4281830B2 (en) * | 2007-09-13 | 2009-06-17 | トヨタ自動車株式会社 | Vehicle control apparatus, control method, and program for realizing the method |
| DE102008052134B4 (en) * | 2007-10-22 | 2020-08-06 | Continental Teves Ag & Co. Ohg | Method and device for improving the driving behavior of a motor vehicle |
| US7853389B2 (en) * | 2007-10-29 | 2010-12-14 | Ford Global Technologies, Llc | Traction control for performance and demonstration spin |
| US8589049B2 (en) | 2007-12-03 | 2013-11-19 | Lockheed Martin Corporation | GPS-based system and method for controlling vehicle characteristics based on terrain |
| US20090143937A1 (en) * | 2007-12-04 | 2009-06-04 | Lockheed Martin Corporation | GPS-based traction control system using wirelessly received weather data |
| US8145402B2 (en) | 2007-12-05 | 2012-03-27 | Lockheed Martin Corporation | GPS-based traction control system and method using data transmitted between vehicles |
| US8055425B2 (en) * | 2008-03-14 | 2011-11-08 | Ford Global Technologies, Llc | Increased capability modular vehicle-dynamics control architecture |
| US9452654B2 (en) | 2009-01-07 | 2016-09-27 | Fox Factory, Inc. | Method and apparatus for an adjustable damper |
| US10060499B2 (en) | 2009-01-07 | 2018-08-28 | Fox Factory, Inc. | Method and apparatus for an adjustable damper |
| US8627932B2 (en) | 2009-01-07 | 2014-01-14 | Fox Factory, Inc. | Bypass for a suspension damper |
| US20100170760A1 (en) | 2009-01-07 | 2010-07-08 | John Marking | Remotely Operated Bypass for a Suspension Damper |
| US8857580B2 (en) | 2009-01-07 | 2014-10-14 | Fox Factory, Inc. | Remotely operated bypass for a suspension damper |
| US10047817B2 (en) | 2009-01-07 | 2018-08-14 | Fox Factory, Inc. | Method and apparatus for an adjustable damper |
| US11306798B2 (en) | 2008-05-09 | 2022-04-19 | Fox Factory, Inc. | Position sensitive suspension damping with an active valve |
| US9033122B2 (en) | 2009-01-07 | 2015-05-19 | Fox Factory, Inc. | Method and apparatus for an adjustable damper |
| DE102008028424A1 (en) * | 2008-06-17 | 2009-12-24 | Continental Automotive Gmbh | Method for operating a control device of a motor vehicle and control device of a motor vehicle for carrying out the method |
| US8060290B2 (en) | 2008-07-17 | 2011-11-15 | Honeywell International Inc. | Configurable automotive controller |
| US8393446B2 (en) | 2008-08-25 | 2013-03-12 | David M Haugen | Methods and apparatus for suspension lock out and signal generation |
| CN105711596B (en) | 2008-10-21 | 2018-06-29 | 大陆-特韦斯贸易合伙股份公司及两合公司 | For controlling the method for motor vehicle and its equipment |
| EP3666347B1 (en) | 2008-11-25 | 2021-10-20 | Fox Factory, Inc. | Computer usable storage medium for virtual competition |
| US20100276906A1 (en) * | 2009-05-04 | 2010-11-04 | Mario Galasso | Suspension system for a vehicle |
| US9422018B2 (en) | 2008-11-25 | 2016-08-23 | Fox Factory, Inc. | Seat post |
| US10036443B2 (en) | 2009-03-19 | 2018-07-31 | Fox Factory, Inc. | Methods and apparatus for suspension adjustment |
| US9140325B2 (en) | 2009-03-19 | 2015-09-22 | Fox Factory, Inc. | Methods and apparatus for selective spring pre-load adjustment |
| US8175785B2 (en) * | 2008-12-22 | 2012-05-08 | GM Global Technology Operations LLC | System and method for performance launch control of a vehicle |
| US8200408B2 (en) * | 2008-12-22 | 2012-06-12 | GM Global Technology Operations LLC | System and method for active traction control of a vehicle |
| US12122205B2 (en) | 2009-01-07 | 2024-10-22 | Fox Factory, Inc. | Active valve for an internal bypass |
| US9038791B2 (en) | 2009-01-07 | 2015-05-26 | Fox Factory, Inc. | Compression isolator for a suspension damper |
| US10821795B2 (en) | 2009-01-07 | 2020-11-03 | Fox Factory, Inc. | Method and apparatus for an adjustable damper |
| US11299233B2 (en) | 2009-01-07 | 2022-04-12 | Fox Factory, Inc. | Method and apparatus for an adjustable damper |
| US8244442B2 (en) | 2009-02-17 | 2012-08-14 | Lockheed Martin Corporation | System and method for stability control of vehicle and trailer |
| JP4741012B2 (en) * | 2009-02-17 | 2011-08-03 | 本田技研工業株式会社 | Travel mode switching device |
| US8229639B2 (en) | 2009-02-17 | 2012-07-24 | Lockheed Martin Corporation | System and method for stability control |
| US8352120B2 (en) | 2009-02-17 | 2013-01-08 | Lockheed Martin Corporation | System and method for stability control using GPS data |
| US8290666B2 (en) | 2009-02-23 | 2012-10-16 | GM Global Technology Operations LLC | Method and system for controlling a vehicle engine during performance driving events |
| US8936139B2 (en) | 2009-03-19 | 2015-01-20 | Fox Factory, Inc. | Methods and apparatus for suspension adjustment |
| AT508044A1 (en) * | 2009-04-07 | 2010-10-15 | Siemens Ag Oesterreich | METHOD FOR CONTROLLING AN AIR SPRING ARRANGEMENT OF A VEHICLE |
| GB2470192A (en) * | 2009-05-12 | 2010-11-17 | Gm Global Tech Operations Inc | Controlling an active vehicle subsystem |
| US8113521B2 (en) * | 2009-06-19 | 2012-02-14 | Pin Hsiu Rubber Co., Ltd. | Intelligent electronic air suspension system that automatically adjusts its air pressure |
| US8620461B2 (en) | 2009-09-24 | 2013-12-31 | Honeywell International, Inc. | Method and system for updating tuning parameters of a controller |
| US8955653B2 (en) | 2009-10-13 | 2015-02-17 | Fox Factory, Incorporated | Methods and apparatus for controlling a fluid damper |
| US8672106B2 (en) | 2009-10-13 | 2014-03-18 | Fox Factory, Inc. | Self-regulating suspension |
| US8099226B2 (en) * | 2009-11-06 | 2012-01-17 | Toyota Motor Engineering & Manufacturing North America, Inc. | Throttle compensation for second gear starts in manual transmission vehicles |
| EP2514953B1 (en) * | 2009-12-17 | 2019-08-14 | Toyota Jidosha Kabushiki Kaisha | Vehicle control apparatus |
| WO2011075014A1 (en) * | 2009-12-18 | 2011-06-23 | Volvo Lastvagnar Ab | Anti-slip support system and method for improving traction of a truck |
| US10697514B2 (en) | 2010-01-20 | 2020-06-30 | Fox Factory, Inc. | Remotely operated bypass for a suspension damper |
| US8527160B2 (en) * | 2010-02-05 | 2013-09-03 | Honda Motor Co., Ltd. | Control system and method for automatic selection of a low range gear ratio for a vehicle drivetrain |
| US8449430B2 (en) * | 2010-02-05 | 2013-05-28 | Honda Motor Co., Ltd. | Transversely mounted transaxle having a low range gear assembly and powertrain for a vehicle including same |
| US8655569B2 (en) * | 2010-03-02 | 2014-02-18 | Toyota Motor Engineering & Manufacturing North America, Inc. | Method and system for varying an output of a driveforce unit based on load data |
| DE102010003251A1 (en) * | 2010-03-25 | 2011-09-29 | Bayerische Motoren Werke Aktiengesellschaft | Method for adjusting e.g. driver assistance function, of motor car, involves setting regulation for function to adjust manipulated variable depending on input variable based on received values, and controlling function based on regulation |
| US20110307130A1 (en) * | 2010-05-13 | 2011-12-15 | Coda Automotive, Inc. | Selectable driving modes |
| US8504175B2 (en) | 2010-06-02 | 2013-08-06 | Honeywell International Inc. | Using model predictive control to optimize variable trajectories and system control |
| AT508066B1 (en) | 2010-07-01 | 2014-04-15 | Avl List Gmbh | METHOD FOR CONTROLLING A HYBRID VEHICLE |
| EP2402239B1 (en) | 2010-07-02 | 2020-09-02 | Fox Factory, Inc. | Adjustable seat post |
| EP2407356A1 (en) * | 2010-07-17 | 2012-01-18 | Valeo Schalter und Sensoren GmbH | Method for autonoumously braking a motor vehicle and autonomous braking system for a motor vehicle |
| US8452504B2 (en) | 2010-07-30 | 2013-05-28 | Honda Motor Co., Ltd. | Control system and method for automatic control of selection of on-demand all-wheel drive assembly for a vehicle drivetrain |
| US8364369B2 (en) | 2010-07-30 | 2013-01-29 | Honda Motor Co., Ltd. | Low range drive ratio transfer changeover anti-rollback system and method |
| US8534409B2 (en) | 2010-07-30 | 2013-09-17 | Honda Motor Co., Ltd. | Drivetrain for a vehicle and method of controlling same |
| US9205869B2 (en) | 2010-08-16 | 2015-12-08 | Honda Motor Co., Ltd. | System and method for determining a steering angle for a vehicle and system and method for controlling a vehicle based on same |
| JP5126320B2 (en) * | 2010-08-30 | 2013-01-23 | トヨタ自動車株式会社 | Vehicle control device |
| JP2012076472A (en) * | 2010-09-30 | 2012-04-19 | Toyota Motor Corp | Vehicle running control apparatus |
| US9333975B2 (en) | 2011-02-05 | 2016-05-10 | Ford Global Technologies, Llc | Method and system to detect and mitigate customer dissatisfaction with performance of automatic mode selection system |
| US8600614B2 (en) | 2011-02-05 | 2013-12-03 | Ford Global Technologies, Llc | System and method for integrated control of vehicle control systems |
| DE102011010714A1 (en) | 2011-02-09 | 2012-08-09 | GM Global Technology Operations LLC (n. d. Gesetzen des Staates Delaware) | Motor vehicle with adaptive chassis |
| GB2489211B (en) * | 2011-03-15 | 2013-11-20 | Jaguar Land Rover Ltd | Vehicle and method of control thereof |
| WO2012127503A2 (en) * | 2011-03-18 | 2012-09-27 | Indian Institute Of Technology Bombay | Yaw rate control in motor vehicles |
| GB201107102D0 (en) * | 2011-04-28 | 2011-06-08 | Land Rover Uk Ltd | Hybrid electric vehicle and method of control thereof |
| EP3636953B1 (en) | 2011-05-31 | 2023-09-27 | Fox Factory, Inc. | Apparatus for position sensitive and/or adjustable suspension damping |
| GB2492748B (en) | 2011-07-04 | 2014-05-07 | Jaguar Land Rover Ltd | Vehicle control system and method for controlling a vehicle |
| GB2492953A (en) * | 2011-07-13 | 2013-01-23 | Land Rover Uk Ltd | Vehicle control system and method employing output from an imaging device |
| EP3929459A1 (en) | 2011-09-12 | 2021-12-29 | Fox Factory, Inc. | Methods and apparatus for suspension set up |
| GB2490751B (en) | 2011-09-13 | 2013-04-24 | Land Rover Uk Ltd | Powertrain control system |
| US8561749B2 (en) | 2011-09-19 | 2013-10-22 | Hb Performance Systems, Inc. | ATV or UTV differential with integrated sensors |
| US9677493B2 (en) | 2011-09-19 | 2017-06-13 | Honeywell Spol, S.R.O. | Coordinated engine and emissions control system |
| US9031754B2 (en) * | 2011-10-04 | 2015-05-12 | Bendix Commercial Vehicle Systems Llc | Towing vehicle controller providing brake control to a towed vehicle and method |
| DE102011085140A1 (en) | 2011-10-25 | 2013-04-25 | Robert Bosch Gmbh | Method and control unit for operating a vehicle dynamics control of a vehicle and control system for vehicle dynamics control of a vehicle using environmental sensing data |
| US20130111905A1 (en) | 2011-11-04 | 2013-05-09 | Honeywell Spol. S.R.O. | Integrated optimization and control of an engine and aftertreatment system |
| US9650934B2 (en) | 2011-11-04 | 2017-05-16 | Honeywell spol.s.r.o. | Engine and aftertreatment optimization system |
| DE102012010490A1 (en) | 2011-12-17 | 2013-06-20 | Volkswagen Aktiengesellschaft | Method and operating device for setting vehicle functions |
| GB201200279D0 (en) | 2012-01-09 | 2012-02-22 | Land Rover Uk Ltd | Vehicle rollback control apparatus and method |
| GB2498729B (en) | 2012-01-25 | 2014-04-09 | Jaguar Land Rover Ltd | Adaptive control of internal combustion engine |
| GB2498731B (en) | 2012-01-25 | 2014-04-09 | Jaguar Land Rover Ltd | Adaptive control of internal combustion engine |
| US11279199B2 (en) | 2012-01-25 | 2022-03-22 | Fox Factory, Inc. | Suspension damper with by-pass valves |
| GB2498929B (en) * | 2012-01-25 | 2014-05-07 | Jaguar Land Rover Ltd | Adaptive control of internal combustion engine |
| GB2498730B (en) | 2012-01-25 | 2014-04-09 | Jaguar Land Rover Ltd | Adaptive control of internal combustion engine |
| GB2499252A (en) | 2012-02-13 | 2013-08-14 | Jaguar Cars | Driver advice system for a vehicle |
| GB2499461B (en) | 2012-02-20 | 2014-08-13 | Jaguar Land Rover Ltd | Improvements in vehicle cruise control |
| GB201204419D0 (en) * | 2012-03-13 | 2012-04-25 | Jaguar Cars | Regeneration of diesel particle filter |
| JP5639611B2 (en) * | 2012-03-21 | 2014-12-10 | 富士重工業株式会社 | Vehicle control device |
| US10330171B2 (en) | 2012-05-10 | 2019-06-25 | Fox Factory, Inc. | Method and apparatus for an adjustable damper |
| US9376108B2 (en) | 2012-06-07 | 2016-06-28 | Jaguar Land Rover Limited | Vehicle steering |
| US9221340B2 (en) * | 2012-06-29 | 2015-12-29 | Caterpillar Inc. | Machine control system |
| CN104718114B (en) | 2012-08-16 | 2017-06-13 | 捷豹路虎有限公司 | Vehicle speed control system |
| GB2505023B (en) | 2012-08-16 | 2015-01-14 | Jaguar Land Rover Ltd | System and method for controlling the speed of a vehicle using vehicle configuration |
| GB2508459B (en) * | 2012-08-16 | 2015-01-21 | Jaguar Land Rover Ltd | System and method for controlling vehicle speed to enhance occupant comfort |
| GB2505021B (en) | 2012-08-16 | 2015-09-09 | Jaguar Land Rover Ltd | Vehicle speed control system |
| GB2525102B (en) * | 2012-08-16 | 2016-03-02 | Jaguar Land Rover Ltd | Vehicle speed control system |
| GB2505020B (en) | 2012-08-16 | 2015-09-09 | Jaguar Land Rover Ltd | Vehicle speed control system |
| GB201215968D0 (en) * | 2012-09-06 | 2012-10-24 | Jaguar Cars | Vehicle control system and method |
| GB201215963D0 (en) * | 2012-09-06 | 2012-10-24 | Jaguar Cars | Vehicle control system and method |
| GB2505679B (en) | 2012-09-06 | 2015-02-18 | Jaguar Land Rover Ltd | Vehicle control system and method |
| GB201215967D0 (en) * | 2012-09-06 | 2012-10-24 | Jaguar Cars | Vehicle control system and method |
| GB2506116B (en) * | 2012-09-19 | 2015-10-21 | Jaguar Land Rover Ltd | Powertrain control system |
| EP2712782B1 (en) * | 2012-09-28 | 2018-01-31 | Hitachi, Ltd. | Method and apparatus for performing driving assistance |
| MX358548B (en) * | 2012-11-07 | 2018-08-24 | Polaris Inc | Vehicle having suspension with continuous damping control. |
| US9205717B2 (en) | 2012-11-07 | 2015-12-08 | Polaris Industries Inc. | Vehicle having suspension with continuous damping control |
| US8874346B2 (en) | 2012-11-15 | 2014-10-28 | Caterpillar Inc. | System with blended anti-lock and stability control |
| US9914454B2 (en) * | 2012-12-07 | 2018-03-13 | Kelsey-Hayes Company | Vehicle speed control system |
| DE102012023969A1 (en) * | 2012-12-07 | 2014-06-12 | Volkswagen Aktiengesellschaft | Method for controlling a reduction gear of a motor vehicle |
| SE537860C2 (en) * | 2012-12-17 | 2015-11-03 | Scania Cv Ab | Procedure and system for controlling the performance of a vehicle |
| US9007199B2 (en) | 2013-01-29 | 2015-04-14 | Honda Motor Co., Ltd. | Drive mode selector |
| GB2511830B (en) * | 2013-03-14 | 2015-12-30 | Jaguar Land Rover Ltd | Ride height control unit and method |
| US8843288B1 (en) * | 2013-03-14 | 2014-09-23 | Chrysler Group Llc | Vehicle speed control system and method |
| GB201304781D0 (en) * | 2013-03-15 | 2013-05-01 | Jaguar Land Rover Ltd | Vehicle speed control system and method |
| GB2511867B (en) | 2013-03-15 | 2016-07-13 | Jaguar Land Rover Ltd | Vehicle speed control system and method |
| GB2514162B (en) * | 2013-05-16 | 2015-08-05 | Jaguar Land Rover Ltd | Vehicle speed control system |
| GB2516497A (en) * | 2013-07-25 | 2015-01-28 | Jaguar Land Rover Ltd | Vehicle speed control system and method |
| GB2545791B (en) | 2013-07-25 | 2018-04-04 | Jaguar Land Rover Ltd | Vehicle control system and method |
| GB2546920B (en) * | 2013-08-07 | 2018-03-07 | Jaguar Land Rover Ltd | Vehicle speed control system and method |
| GB201314152D0 (en) | 2013-08-07 | 2013-09-18 | Jaguar Land Rover Ltd | Vehicle speed control system and method |
| DE102013217870B4 (en) * | 2013-09-06 | 2022-10-06 | Volkswagen Aktiengesellschaft | Method and device for operating a damping system for a motor vehicle |
| GB2517995B (en) * | 2013-09-09 | 2018-04-11 | Jaguar Land Rover Ltd | Vehicle control system and method |
| GB201316039D0 (en) * | 2013-09-09 | 2013-10-23 | Jaguar Land Rover Ltd | Vehicle control system and method |
| GB2519533B (en) | 2013-10-23 | 2018-04-04 | Jaguar Land Rover Ltd | Vehicle speed control system |
| GB201318706D0 (en) | 2013-10-23 | 2013-12-04 | Jaguar Land Rover Ltd | Improvements in vehicle speed control |
| JP6288417B2 (en) | 2013-11-29 | 2018-03-07 | 三菱自動車工業株式会社 | Vehicle control device |
| JP5949735B2 (en) * | 2013-11-29 | 2016-07-13 | トヨタ自動車株式会社 | Vehicle vibration control device for vehicle |
| EP3093197B1 (en) * | 2014-01-09 | 2022-08-03 | Kawasaki Motors, Ltd. | Vehicle, and method of assisting driving of same |
| US20150226134A1 (en) * | 2014-02-11 | 2015-08-13 | Pao Shan AN | Apparatus for increasing vehicle drive power output |
| US9623879B2 (en) | 2014-02-18 | 2017-04-18 | Honda Motor Co., Ltd. | System for operating vehicle in different driving modes and methods for same |
| GB2523323B (en) | 2014-02-19 | 2016-06-01 | Jaguar Land Rover Ltd | Motor vehicle controller and method |
| US9199640B2 (en) * | 2014-02-28 | 2015-12-01 | Ford Global Technologies, Llc | Control of electronic limited slip differential while towing |
| GB2524060B (en) * | 2014-03-13 | 2016-12-14 | Jaguar Land Rover Ltd | Controller and method |
| GB201406563D0 (en) * | 2014-04-11 | 2014-05-28 | Jaguar Land Rover Ltd | System and method for driving scenario configuration |
| GB2527089B (en) | 2014-06-11 | 2018-08-01 | Jaguar Land Rover Ltd | Vehicle control system and method |
| DE102014215258A1 (en) | 2014-08-04 | 2016-02-04 | Bayerische Motoren Werke Aktiengesellschaft | Method and apparatus for automatically selecting driving modes |
| DE102014215259B4 (en) | 2014-08-04 | 2017-03-02 | Bayerische Motoren Werke Aktiengesellschaft | Method and device for automatically selecting a driving mode on a motor vehicle |
| GB2531327B (en) * | 2014-10-17 | 2017-08-23 | Jaguar Land Rover Ltd | Traction control system modified by vehicle pitch and/or heave |
| GB2531777B (en) * | 2014-10-30 | 2018-02-14 | Jaguar Land Rover Ltd | Controlling the braking of a vehicle descending a slope |
| MX2017005022A (en) | 2014-10-31 | 2017-06-29 | Polaris Inc | System and method for controlling a vehicle. |
| GB2534117B (en) * | 2014-11-19 | 2018-09-12 | Jaguar Land Rover Ltd | Control system and method of controlling a driveline |
| US20160167646A1 (en) * | 2014-12-12 | 2016-06-16 | GM Global Technology Operations LLC | Automated preparation methods and systems |
| GB2534571B (en) | 2015-01-27 | 2018-06-13 | Jaguar Land Rover Ltd | Vehicle speed control having constraining drive torque in dependence on a target speed and the mean speed of the driven wheels |
| EP3051367B1 (en) | 2015-01-28 | 2020-11-25 | Honeywell spol s.r.o. | An approach and system for handling constraints for measured disturbances with uncertain preview |
| EP3056706A1 (en) | 2015-02-16 | 2016-08-17 | Honeywell International Inc. | An approach for aftertreatment system modeling and model identification |
| JP6476982B2 (en) * | 2015-02-20 | 2019-03-06 | 三菱自動車工業株式会社 | Four-wheel drive vehicle control system |
| USD971088S1 (en) | 2015-04-03 | 2022-11-29 | Warn Automotive, Llc | Motorized disconnect assembly |
| WO2016170557A1 (en) * | 2015-04-21 | 2016-10-27 | Nec Corporation | Optimization system |
| GB2537884A (en) * | 2015-04-29 | 2016-11-02 | Jaguar Land Rover Ltd | Improvements in vehicle speed control |
| GB2537952B (en) * | 2015-04-29 | 2019-07-03 | Jaguar Land Rover Ltd | Vehicle speed control for low speed progress |
| EP3091212A1 (en) | 2015-05-06 | 2016-11-09 | Honeywell International Inc. | An identification approach for internal combustion engine mean value models |
| MX2017014403A (en) | 2015-05-15 | 2018-04-11 | Polaris Inc | Utility vehicle. |
| GB2548731B (en) | 2015-05-26 | 2018-02-14 | Jaguar Land Rover Ltd | Control system and method of controlling a driveline |
| EP3125052B1 (en) | 2015-07-31 | 2020-09-02 | Garrett Transportation I Inc. | Quadratic program solver for mpc using variable ordering |
| US10272779B2 (en) | 2015-08-05 | 2019-04-30 | Garrett Transportation I Inc. | System and approach for dynamic vehicle speed optimization |
| US9828044B2 (en) * | 2015-09-25 | 2017-11-28 | GM Global Technology Operations LLC | Feedback control of vehicle aerodynamics |
| GB2545261A (en) | 2015-12-11 | 2017-06-14 | Jaguar Land Rover Ltd | Control system and method of controlling a driveline |
| GB2545714B (en) | 2015-12-23 | 2018-10-24 | Jaguar Land Rover Ltd | Control system for a vehicle and method |
| GB2545715B (en) * | 2015-12-23 | 2019-04-10 | Jaguar Land Rover Ltd | Control system for a vehicle and method |
| US10415492B2 (en) | 2016-01-29 | 2019-09-17 | Garrett Transportation I Inc. | Engine system with inferential sensor |
| GB2546980B (en) | 2016-02-01 | 2019-10-09 | Jaguar Land Rover Ltd | Control system for a vehicle and method |
| GB201602440D0 (en) | 2016-02-11 | 2016-03-30 | Jaguar Land Rover Ltd | Improvements in vehicle speed control |
| GB201604555D0 (en) | 2016-03-17 | 2016-05-04 | Jaguar Land Rover Ltd | Apparatus and method for noise cancellation |
| GB2549106B (en) | 2016-04-05 | 2019-11-20 | Jaguar Land Rover Ltd | Improvements in vehicle speed control |
| GB2549105B (en) | 2016-04-05 | 2019-12-25 | Jaguar Land Rover Ltd | Improvements in vehicle speed control |
| GB2549108B (en) | 2016-04-05 | 2020-01-01 | Jaguar Land Rover Ltd | Improvements in vehicle speed control |
| US10737546B2 (en) | 2016-04-08 | 2020-08-11 | Fox Factory, Inc. | Electronic compression and rebound control |
| US10036338B2 (en) | 2016-04-26 | 2018-07-31 | Honeywell International Inc. | Condition-based powertrain control system |
| US10124750B2 (en) | 2016-04-26 | 2018-11-13 | Honeywell International Inc. | Vehicle security module system |
| GB2550556A (en) | 2016-05-16 | 2017-11-29 | Jaguar Land Rover Ltd | Hybrid electric vehicle control system and method |
| US10035510B2 (en) | 2016-05-27 | 2018-07-31 | Ford Global Technologies, Llc | Adaptive drive control low-traction detection and mode selection |
| WO2017220705A1 (en) | 2016-06-24 | 2017-12-28 | Jaguar Land Rover Limited | Control system for a vehicle |
| GB2552021B (en) | 2016-07-08 | 2019-08-28 | Jaguar Land Rover Ltd | Improvements in vehicle speed control |
| US10124802B2 (en) * | 2016-08-20 | 2018-11-13 | Toyota Motor Engineering & Manufacturing North America, Inc. | Controlled vehicle deceleration based on a selected vehicle driving mode |
| AT519071B1 (en) | 2016-09-13 | 2021-09-15 | Rosenbauer Int Ag | Operating procedure for an emergency vehicle |
| DE102016220313B3 (en) * | 2016-10-18 | 2018-03-29 | Audi Ag | Method for operating a motor vehicle with a plurality of driver assistance systems and motor vehicle |
| GB201618139D0 (en) | 2016-10-27 | 2016-12-14 | Jaguar Land Rover Ltd | Control system for a vehicle and method |
| US10232841B2 (en) * | 2016-11-18 | 2019-03-19 | Ford Global Technologies, Llc | Methods and system for improving response of a hybrid vehicle |
| WO2018094212A2 (en) | 2016-11-18 | 2018-05-24 | Polaris Industries Inc. | Vehicle having adjustable suspension |
| EP3548729B1 (en) | 2016-11-29 | 2023-02-22 | Garrett Transportation I Inc. | An inferential flow sensor |
| US10358180B2 (en) | 2017-01-05 | 2019-07-23 | Sram, Llc | Adjustable seatpost |
| JPWO2018131695A1 (en) * | 2017-01-12 | 2019-11-07 | 玲於奈 望月 | Operating device |
| GB2563198B (en) | 2017-03-15 | 2021-05-26 | Jaguar Land Rover Ltd | A system for identifying water ahead of a vehicle |
| GB2560575B (en) | 2017-03-17 | 2019-06-05 | Jaguar Land Rover Ltd | Vehicle driving aid and method |
| US20180281797A1 (en) * | 2017-04-04 | 2018-10-04 | Ford Global Technologies, Llc | Settings adjustments of off-road vehicles |
| US10319225B2 (en) * | 2017-05-24 | 2019-06-11 | Toyota Motor Engineering & Manufacturing North America, Inc. | System, method, and computer-readable storage medium for determining road type |
| US10406884B2 (en) | 2017-06-09 | 2019-09-10 | Polaris Industries Inc. | Adjustable vehicle suspension system |
| GB2565547B (en) | 2017-08-14 | 2022-03-02 | Jaguar Land Rover Ltd | Estimating terrain roughness |
| GB2565819B (en) | 2017-08-24 | 2020-03-04 | Jaguar Land Rover Ltd | Vehicle controller and method |
| US11057213B2 (en) | 2017-10-13 | 2021-07-06 | Garrett Transportation I, Inc. | Authentication system for electronic control unit on a bus |
| DE102017126639A1 (en) | 2017-11-13 | 2019-05-16 | Volkswagen Aktiengesellschaft | A method for collecting personal information and for creating a user profile for a driver and an input device |
| US20190161089A1 (en) * | 2017-11-28 | 2019-05-30 | GM Global Technology Operations LLC | Control of chassis systems in relation to aerodynamic loads |
| JP2019127095A (en) * | 2018-01-23 | 2019-08-01 | マツダ株式会社 | Control device of vehicle |
| DE102018202737A1 (en) * | 2018-02-23 | 2019-08-29 | Bayerische Motoren Werke Aktiengesellschaft | Brake system with adjustable brake pedal characteristic |
| DE102018208213B4 (en) * | 2018-05-24 | 2021-10-14 | Bayerische Motoren Werke Aktiengesellschaft | Speed controlled adaptive mode |
| US10946736B2 (en) | 2018-06-05 | 2021-03-16 | Polaris Industries Inc. | All-terrain vehicle |
| JP7190492B2 (en) * | 2018-08-09 | 2022-12-15 | 株式会社ユニバンス | power transmission device |
| US10987987B2 (en) | 2018-11-21 | 2021-04-27 | Polaris Industries Inc. | Vehicle having adjustable compression and rebound damping |
| US20200207174A1 (en) * | 2018-12-27 | 2020-07-02 | Continental Automotive Systems Inc. | Steady state attitude control using suspension with variable volume air springs |
| US11247561B2 (en) * | 2019-04-10 | 2022-02-15 | Akrus Inc. | Systems and methods for controlling driving dynamics in a vehicle |
| CN112208282B (en) * | 2019-07-10 | 2022-06-14 | 广州汽车集团股份有限公司 | Control method, control device, computer equipment and storage medium |
| US11639162B2 (en) | 2019-11-26 | 2023-05-02 | Robert Bosch Gmbh | Reducing braking torque instead of engine torque to accelerate vehicle during vehicle hill descent control |
| CN115003578A (en) | 2020-01-17 | 2022-09-02 | 沃尔沃卡车集团 | Cruise control system and method for controlling a powertrain |
| US11904648B2 (en) | 2020-07-17 | 2024-02-20 | Polaris Industries Inc. | Adjustable suspensions and vehicle operation for off-road recreational vehicles |
| CN114248831B (en) * | 2020-09-25 | 2024-06-07 | 本田技研工业株式会社 | Electric power steering apparatus |
| CN112622929A (en) * | 2020-12-12 | 2021-04-09 | 王伟伟 | Scram formula autopilot system with speed regulation and control knob |
| US20220266690A1 (en) * | 2021-02-19 | 2022-08-25 | Ford Global Technologies, Llc | Powertrain situational calibration |
| US20220306119A1 (en) * | 2021-03-25 | 2022-09-29 | Ford Global Technologies, Llc | Location-based vehicle operation |
| DE102021112941A1 (en) | 2021-05-19 | 2022-11-24 | Audi Aktiengesellschaft | Determining driving characteristics of a vehicle |
| CN113291312B (en) * | 2021-06-18 | 2022-09-06 | 重庆长安汽车股份有限公司 | Intelligent power assembly control method |
| US11970154B2 (en) * | 2021-09-03 | 2024-04-30 | GM Global Technology Operations LLC | Transmission output speed based wheel flare control system for electrified vehicle applications |
| FR3129128A1 (en) * | 2021-11-16 | 2023-05-19 | Renault S.A.S | Method and system for managing a multi-mode system of a motor vehicle |
| CN114987489B (en) * | 2022-06-07 | 2024-07-12 | 东风汽车集团股份有限公司 | Omnibearing vehicle driving multimode system and vehicle |
| EP4385845A1 (en) * | 2022-12-14 | 2024-06-19 | Bugatti Rimac D.o.o. | Vehicle with driving modes control and management system |
| US11850948B1 (en) * | 2023-06-28 | 2023-12-26 | Rivian Ip Holdings, Llc | Drag detection by electrical parameters |
Citations (177)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3580354A (en) * | 1967-09-01 | 1971-05-25 | Harlan Douglas Hewitt | Vehicle tilt compensator |
| US3645315A (en) * | 1969-10-31 | 1972-02-29 | Goodrich Co B F | All terrain vehicle tires |
| US3982793A (en) * | 1972-06-27 | 1976-09-28 | Texas Instruments Incorporated | Vehicle skid control system |
| US4060285A (en) * | 1972-06-27 | 1977-11-29 | Texas Instruments Incorporated | Brake control logic circuit for vehicle skid control brake system |
| US4085697A (en) * | 1976-02-24 | 1978-04-25 | Johannes Leonardus Gaasenbeek | All-terrain vehicle |
| US4172588A (en) * | 1978-03-15 | 1979-10-30 | James K. Gilman | Damping system for vehicular suspension |
| US4196940A (en) * | 1972-06-27 | 1980-04-08 | Texas Instruments Incorporated | Differentiator and variable threshold gate circuit for vehicle skid control brake system |
| US4215593A (en) * | 1976-10-25 | 1980-08-05 | Nissan Motor Company, Limited | Transfer case for automotive vehicles |
| US4372407A (en) | 1978-08-17 | 1983-02-08 | Owens-Illinois, Inc. | Independent steering and propulsion system for off road vehicle |
| US4418737A (en) | 1981-07-31 | 1983-12-06 | Am General Corporation | Automatic tire inflation system |
| GB2154763A (en) | 1984-02-07 | 1985-09-11 | Nissan Motor | Output torque dependent throttle control system for internal combustion engine |
| US4569255A (en) | 1984-09-12 | 1986-02-11 | Eaton Corporation | Automatic transmission controls with off-highway mode |
| US4576065A (en) | 1984-09-12 | 1986-03-18 | Eaton Corporation | Automatic transmission controls with multiple downshift off-highway mode |
| US4592442A (en) * | 1984-11-29 | 1986-06-03 | International Harvester Company | Control system for a vehicle with two speed rear axle and single speed front axle drive |
| US4602696A (en) | 1984-06-12 | 1986-07-29 | Toyota Jidosha Kabushiki Kaisha | Control system for selectively switchable two/four wheel drive automatic transmission system providing shifting characteristic matched to driving condition |
| US4619303A (en) | 1984-06-04 | 1986-10-28 | Eaton Corporation | Vehicle air system including central tire inflation system |
| US4640331A (en) | 1984-06-04 | 1987-02-03 | Eaton Corporation | Central tire inflation system |
| US4651290A (en) | 1983-06-16 | 1987-03-17 | Nippondenso Co., Ltd. | Road condition discriminating system |
| US4719819A (en) * | 1985-02-18 | 1988-01-19 | Suzuki Motor Company Limited | Power transmission system for a vehicle |
| US4760893A (en) | 1985-10-22 | 1988-08-02 | Robert Bosch Gmbh | Method of controlling slipping or spinning of a vehicle wheel |
| US4829434A (en) * | 1987-04-29 | 1989-05-09 | General Motors Corporation | Adaptive vehicle |
| US4856477A (en) | 1987-07-24 | 1989-08-15 | Nissan Motor Company, Limited | Throttle control system for automotive internal combustion engine with fail-safe mechanism |
| DE3817495A1 (en) | 1988-05-21 | 1989-11-30 | Bayerische Motoren Werke Ag | Motor vehicle with user-specific, adjustable, electronically controllable functions |
| US4898216A (en) | 1988-05-25 | 1990-02-06 | Eaton Corporation | CTIS control system and method for sensing and indication of inadequate rate of change of tire inflation pressurization |
| US4922427A (en) | 1986-11-28 | 1990-05-01 | Nissan Motor Company, Limited | Combined power steering and variable suspension control arrangement |
| US4924926A (en) | 1988-08-15 | 1990-05-15 | Eaton Corporation | Central tire inflation system |
| US4936404A (en) | 1987-12-22 | 1990-06-26 | Fuji Jukogyo Kabushiki Kaisha | Vehicle traction control system providing two or more different drive modes at the driver's option |
| US4987937A (en) | 1989-07-03 | 1991-01-29 | Eaton Corporation | In-tire filter assembly for central tire inflation system |
| US5046009A (en) * | 1987-11-05 | 1991-09-03 | Nissan Motor Company, Limited | Slip suppressive drive control system for automotive vehicle with reduction of power output of internal combustion engine |
| US5067778A (en) | 1990-11-19 | 1991-11-26 | Testardi David A | High performance anti-lock brake system for original equipment and after-market applications |
| US5121774A (en) | 1988-05-25 | 1992-06-16 | Eaton Corporation | Fault detection method |
| JPH04257759A (en) | 1991-02-12 | 1992-09-11 | Nissan Motor Co Ltd | Brake control device for vehicle |
| JPH054529A (en) | 1991-06-27 | 1993-01-14 | Mazda Motor Corp | Differential limit device for vehicle |
| JPH054531A (en) | 1991-06-27 | 1993-01-14 | Mazda Motor Corp | Control device for vehicle |
| JPH054530A (en) | 1991-06-27 | 1993-01-14 | Mazda Motor Corp | Differential limit device for vehicle |
| JPH0571375A (en) | 1991-09-09 | 1993-03-23 | Mazda Motor Corp | Device and method for controlling power train of vehicle |
| JPH05213084A (en) | 1992-02-06 | 1993-08-24 | Mazda Motor Corp | Limited slip differential for vehicle |
| US5247831A (en) * | 1988-11-18 | 1993-09-28 | Fioravanti S.R.L. | Method and system for monitoring the tire footprints of a motor vehicle, particularly for automatically optimizing the behavior of the motor vehicle |
| US5249609A (en) | 1988-07-25 | 1993-10-05 | Eaton Corporation | Deflation control system and method |
| US5253931A (en) | 1990-09-03 | 1993-10-19 | Wabco Westinghouse Fahrzeugbremsen Gmbh | Control logic for an anti-lock vehicle brake system |
| US5263524A (en) | 1992-12-28 | 1993-11-23 | Eaton Corporation | Trailer detection control for vehicle central tire inflation system |
| EP0352921B1 (en) | 1988-07-25 | 1993-11-24 | Eaton Corporation | Deflation control system and method |
| US5278761A (en) | 1992-11-12 | 1994-01-11 | Ford Motor Company | Method for vehicular wheel spin control that adapts to different road traction characteristics |
| US5289895A (en) | 1991-06-27 | 1994-03-01 | Mazda Motor Corporation | Control system for vehicle with differential restricting device |
| US5303794A (en) | 1991-12-17 | 1994-04-19 | Ford Motor Company | Wheel spin control using electronically controlled clutches and engine controls |
| US5309969A (en) | 1991-12-17 | 1994-05-10 | Chander Mittal | Apparatus for repeatable adjustment of tire pressure |
| US5313995A (en) | 1987-06-29 | 1994-05-24 | Eaton Corporation | Central tire inflation system |
| GB2273580A (en) | 1992-12-17 | 1994-06-22 | Ford Motor Co | Methods and apparatus for controlling operating subsystems of a motor vehicle |
| US5327346A (en) | 1991-08-23 | 1994-07-05 | Harsco Corporation | Automatic control for central tire inflation system |
| JPH06286436A (en) | 1993-03-30 | 1994-10-11 | Mazda Motor Corp | Vehicle controller |
| US5355748A (en) | 1991-05-31 | 1994-10-18 | Ntn Corporation | Rotation transmitting device for an interaxle gearless differential |
| JPH06297975A (en) | 1993-02-17 | 1994-10-25 | Mazda Motor Corp | Control device for vehicle with differential limiting device and anti-skid brake |
| JPH06321026A (en) | 1993-05-17 | 1994-11-22 | Mazda Motor Corp | Vehicular controller, vehicular control gain changing device and control gain changing method |
| US5373447A (en) | 1992-01-10 | 1994-12-13 | Lucas Industries | Method of and apparatus for vehicle traction control by detecting wheel spin |
| JPH079976A (en) | 1993-06-29 | 1995-01-13 | Mazda Motor Corp | Controller for vehicle |
| JPH079978A (en) | 1993-06-29 | 1995-01-13 | Mazda Motor Corp | Controller for vehicle |
| JPH079977A (en) | 1993-06-29 | 1995-01-13 | Mazda Motor Corp | Controller for vehicle |
| US5390117A (en) | 1992-06-30 | 1995-02-14 | Siemens Aktiengesellschaft | Transmission control with a fuzzy logic controller |
| US5406861A (en) | 1993-09-22 | 1995-04-18 | Eaton Corporation | Manual modification of automatic mode shift points |
| US5410477A (en) | 1991-03-22 | 1995-04-25 | Hitachi, Ltd. | Control system for an automotive vehicle having apparatus for predicting the driving environment of the vehicle |
| US5410447A (en) | 1990-04-27 | 1995-04-25 | Kabushiki Kaisha Toshiba | Portable computer comprising keyboard and coordinate input tablet connected by two perpendicularly arranged hinges |
| US5436835A (en) * | 1994-03-04 | 1995-07-25 | Emry; Lewis D. | Motor vehicle collision avoidance method and means |
| US5471386A (en) | 1994-10-03 | 1995-11-28 | Ford Motor Company | Vehicle traction controller with torque and slip control |
| US5487002A (en) * | 1992-12-31 | 1996-01-23 | Amerigon, Inc. | Energy management system for vehicles having limited energy storage |
| US5487596A (en) | 1994-09-09 | 1996-01-30 | Kelsey-Hayes Company | Method and system for controlling rear wheel anti-lock brake control on four-wheel drive vehicles braking on high mu surfaces |
| KR960011082A (en) | 1994-09-02 | 1996-04-20 | 가나이 쯔도무 | Power Train Control Device and Control Method |
| US5524481A (en) | 1994-10-27 | 1996-06-11 | Eaton Corporation | Measure wet tank routine comparing its pressure to that of associated tire(s) |
| US5546308A (en) | 1993-02-19 | 1996-08-13 | Toyota Jidosha Kabushiki Kaisha | Apparatus for controlling vehicle speed in response to a road holding ability change |
| US5566582A (en) * | 1993-11-05 | 1996-10-22 | Rover Group Limited | Selector mechanism for a vehicle transmission |
| US5586028A (en) | 1993-12-07 | 1996-12-17 | Honda Giken Kogyo Kabushiki Kaisha | Road surface condition-detecting system and anti-lock brake system employing same |
| US5593176A (en) | 1994-12-16 | 1997-01-14 | Ford Motor Company | Ride height setting based on transfer case setting |
| JPH0932899A (en) | 1995-07-17 | 1997-02-04 | Nissan Motor Co Ltd | Speed change control device for variable speed change gear |
| GB2304835A (en) | 1995-09-07 | 1997-03-26 | Rover Group | Control of gearshifting in an automatic transmission in series with a manual range gearbox |
| US5629874A (en) | 1995-03-08 | 1997-05-13 | Cm Automotive Systems Inc. | Vehicular tire air pressurization system and method |
| US5629873A (en) | 1995-03-08 | 1997-05-13 | Cm Automotive Systems Inc | Distributed intelligence vehicular tire air pressurization system and method |
| US5652655A (en) | 1993-06-29 | 1997-07-29 | Omron Corporation | Road surface discriminator and apparatus applying same |
| KR970070422A (en) | 1996-04-12 | 1997-11-07 | 김영귀 | Valve seat fastening structure |
| US5701247A (en) | 1994-06-17 | 1997-12-23 | Nissan Motor Co., Ltd. | Integrated control system for 4WD vehicles for controlling driving torque distribution |
| US5796344A (en) * | 1995-03-21 | 1998-08-18 | Sprague Controls, Inc. | Imminent icing condition enunciator |
| US5803197A (en) | 1995-08-11 | 1998-09-08 | Nissan Motor Co., Ltd. | Torque-split control system for four-wheel-drive vehicles |
| JPH10272955A (en) | 1997-03-31 | 1998-10-13 | Mitsubishi Motors Corp | Four-wheel drive vehicle |
| US5839084A (en) * | 1994-09-21 | 1998-11-17 | Nissan Motor Co., Ltd. | Driving-torque control system for four-wheel-drive vehicle |
| KR0172685B1 (en) | 1995-12-29 | 1999-02-18 | 김태구 | Suspension system for a vehicle |
| US5886650A (en) | 1996-10-31 | 1999-03-23 | Mitsumi Electric Co., Ltd. | Car navigation system with FM multi-broadcast signal receiving function |
| US5890078A (en) | 1995-11-30 | 1999-03-30 | Mitsubishi Denki Kabushiki Kaisha | Synthetic control system for automobile |
| GB2329731A (en) | 1996-11-19 | 1999-03-31 | Nissan Motor | Vehicle drive force controller |
| US5906645A (en) | 1995-12-04 | 1999-05-25 | Toyota Jidosha Kabushiki Kaisha | Auto-drive control unit for vehicles |
| US5911771A (en) | 1995-09-29 | 1999-06-15 | Bayerische Motoren Werke Aktiengesellschaft | Gear shift control for automatic transmissions in motor vehicles having an electronic control unit |
| US5941614A (en) | 1994-10-12 | 1999-08-24 | Rover Group Limited | Wheeled vehicle |
| GB2334700A (en) | 1998-01-26 | 1999-09-01 | Racelogic Ltd | A vehicle speed controller |
| US5983154A (en) | 1996-03-22 | 1999-11-09 | Toyota Jidosha Kabushiki Kaisha | Control system for automatic transmission having plural running modes |
| US5980415A (en) | 1995-12-11 | 1999-11-09 | Borg-Warner Automotive, Inc. | Adaptive transfer case with EM clutch and dog clutch for 4WD lock up |
| US5979584A (en) * | 1997-07-25 | 1999-11-09 | Ford Global Technologies, Inc. | Four-wheel drive transfer case controller |
| JPH11311332A (en) | 1998-04-24 | 1999-11-09 | Fuji Heavy Ind Ltd | Shift step position display unit for automatic transmission |
| US5984034A (en) * | 1996-05-02 | 1999-11-16 | Toyota Jidosha Kabushiki Kaisha | Hybrid vehicle |
| US5991682A (en) * | 1996-02-21 | 1999-11-23 | Nissan Motor Co., Ltd. | Apparatus and method for controlling driving force derived from internal combustion engine to road wheel of automotive vehicle |
| JPH11325234A (en) | 1998-05-19 | 1999-11-26 | Toyota Motor Corp | Control device for vehicle |
| US5997108A (en) | 1996-11-23 | 1999-12-07 | Wabco Gmbh | Process for controlling the speed of a vehicle travelling on a slope |
| US6002979A (en) * | 1996-02-16 | 1999-12-14 | Nissan Motor Co., Ltd. | Traction control system for automotive vehicles |
| US6009355A (en) | 1997-01-28 | 1999-12-28 | American Calcar Inc. | Multimedia information and control system for automobiles |
| US6007454A (en) * | 1997-11-05 | 1999-12-28 | Toyota Jidosha Kabushiki Kaisha | Traction control device of automobile automatically adapted for high and low gear driving |
| US6016457A (en) | 1996-11-19 | 2000-01-18 | Nissan Motor Co., Ltd. | Vehicle drive force controller |
| EP0976629A2 (en) | 1998-07-29 | 2000-02-02 | Volkswagen Aktiengesellschaft | Procedure and device for brake performance adaptation at momentary wheel - road -adhesion conditions |
| EP0983894A2 (en) | 1998-09-02 | 2000-03-08 | Rover Group Limited | Vehicle speed control using engine and brake systems to achieve target acceleration |
| US6035734A (en) | 1995-04-03 | 2000-03-14 | Magneti Marelli France | Control system imposing automatic mode absent driver manual shift request |
| US6044318A (en) * | 1996-01-25 | 2000-03-28 | Rover Group Limited | Powertrain control system |
| US6070118A (en) | 1996-03-15 | 2000-05-30 | Toyota Jidosha Kabushiki Kaisha | Transmission control system using road data to control the transmission |
| US6076898A (en) | 1997-04-18 | 2000-06-20 | Aisin Seiki Kabushiki Kaisha | Braking control system for a four-wheel drive vehicle |
| US6085137A (en) | 1996-10-25 | 2000-07-04 | Kabushikikaisha Equos Research | Vehicle control device |
| US6086071A (en) * | 1998-01-02 | 2000-07-11 | Chrysler Corporation | Adjustable suspension system for a motor vehicle |
| US6094614A (en) * | 1997-08-26 | 2000-07-25 | Fuji Jukogyo Kabushiki Kaisha | Driving force distribution control system and road friction coefficient estimating apparatus |
| US6095945A (en) | 1997-01-24 | 2000-08-01 | Siemens Aktiengesellschaft | Combined engine and transmission control for a motor vehicle |
| US6098994A (en) | 1996-09-25 | 2000-08-08 | Toyota Jidosha Kabushiki Kaisha | Vehicle height control apparatus |
| EP1028011A2 (en) | 1999-02-13 | 2000-08-16 | Rover Group Limited | A user interface unit for a vehicle |
| US6116105A (en) | 1999-01-14 | 2000-09-12 | Eaton Corporation | Method/system for controlling upshifting after resetting the value of a control parameter indicative of gross combined weight of vehicles |
| US6125314A (en) | 1996-11-20 | 2000-09-26 | Siemens Aktiengesellschaft | Drive train controller for a motor vehicle |
| US6144295A (en) | 1998-12-11 | 2000-11-07 | Case Corporation | Automatic central tire inflation system |
| JP2000344083A (en) | 1999-06-07 | 2000-12-12 | Toyota Motor Corp | Traction control device for vehicle |
| US6161643A (en) * | 1997-12-10 | 2000-12-19 | Daimlerchrysler Corporation | System of controlling torque transfer in a motor vehicle and related method |
| US6166657A (en) * | 1995-03-21 | 2000-12-26 | Commercial Vehicle Systems, Inc. | Imminent icing condition enunciator |
| US6173226B1 (en) * | 1994-06-06 | 2001-01-09 | Hitachi, Ltd. | Control apparatus and method for powertrain of a vehicle |
| US6182002B1 (en) | 1998-10-26 | 2001-01-30 | General Motors Corporation | Vehicle acceleration based traction control |
| FR2796893A1 (en) | 1999-07-30 | 2001-02-02 | Renault | Autoadaptive control system for propulsion unit of motor vehicle to provide adaptation of control of engine and transmission to different driving styles |
| US6188945B1 (en) | 1996-09-12 | 2001-02-13 | Siemens Aktiengesellschaft | Drive train control for a motor vehicle |
| GB2353872A (en) | 1999-08-28 | 2001-03-07 | Roke Manor Research | Vehicle drive control, speed warning and navigation apparatus |
| US6202020B1 (en) * | 1999-08-20 | 2001-03-13 | Meritor Heavy Vehicle Systems, Llc | Method and system for determining condition of road |
| US6205389B1 (en) | 1999-09-16 | 2001-03-20 | Eaton Corporation | Method/system for resetting the value of a control parameter indicative of gross combine weight of vehicles to a default value thereof |
| US6205374B1 (en) | 1993-07-01 | 2001-03-20 | Mazda Motor Corporation | Vehicle characteristic change system and method |
| US6213242B1 (en) | 1998-08-31 | 2001-04-10 | Ashok Rodrigues | Four wheel drive system having torque distribution control responsive to throttle position, speed and selected range |
| US6233514B1 (en) | 1998-08-08 | 2001-05-15 | Wabco Gmbh | Method for controlling the downhill speed of an off-the-road vehicle |
| US6231480B1 (en) * | 1997-05-12 | 2001-05-15 | Mazda Motor Corporation | Lockup control system for fluid coupling of automatic transmission |
| GB2357159A (en) | 1999-12-07 | 2001-06-13 | Rover Group | Terrain responsive control system for land vehicle |
| US6250327B1 (en) | 1999-02-25 | 2001-06-26 | Dana Corporation | Fluid flow valve with variable flow rate |
| US6255963B1 (en) | 1997-02-04 | 2001-07-03 | Mannesmann Ag | Method for transmitting traffic information and devices for implementing said method |
| US6263262B1 (en) | 1998-08-24 | 2001-07-17 | Robert Bosch Gmbh | Vehicle control system |
| US6263282B1 (en) * | 1998-08-27 | 2001-07-17 | Lucent Technologies, Inc. | System and method for warning of dangerous driving conditions |
| US6266602B1 (en) | 1999-02-18 | 2001-07-24 | Unisia Jecs Corporation | Road surface condition determination system for automotive vehicles and anti-skid braking system having the same |
| US6266603B1 (en) * | 1997-12-22 | 2001-07-24 | Renault | Method for detecting slippery surfaces and blocked vehicle wheels, automatic transmission implementing the method and vehicle equipped with same |
| US6268825B1 (en) | 1996-11-25 | 2001-07-31 | Toyota Jidosha Kabushiki Kaisha | Navigation device for vehicle and preparation of road shape data used therefor |
| US6278928B1 (en) | 1996-04-12 | 2001-08-21 | Kabushikikaisha Equos Research | Transmission control device responsive to road information |
| US6293632B1 (en) | 1999-06-11 | 2001-09-25 | John F. Grote | Vehicular brake-by-wire system |
| US6312066B1 (en) * | 1996-01-17 | 2001-11-06 | Itt Manufacturing Enterprises, Inc. | Method for improving the regulation behavior of an ABS system in off-the-road driving |
| US6324461B1 (en) * | 1997-06-27 | 2001-11-27 | Kabushiki Kaisha Toyota Chuo Kenkyusho | Road surface condition estimating apparatus and variation reduction processing apparatus |
| WO2002025291A2 (en) | 2000-09-21 | 2002-03-28 | American Calcar Inc. | Technique for operating a vehicle effectively and safely |
| WO2002026519A2 (en) | 2000-09-28 | 2002-04-04 | Luk Lamellen Und Kupplungsbau Beteiligungs Kg | Method for altering the shift characteristics of an automated shifting gearbox and corresponding device |
| US6409287B1 (en) * | 1999-08-24 | 2002-06-25 | Mazda Motor Corporation | Yaw controlling apparatus for an automobile |
| US6421593B1 (en) | 1999-07-30 | 2002-07-16 | Pierce Manufacturing Inc. | Military vehicle having cooperative control network with distributed I/O interfacing |
| US6428024B1 (en) | 1997-02-18 | 2002-08-06 | Kinetic Limited | Control arrangement for vehicle suspension system |
| US20020143455A1 (en) | 2001-02-01 | 2002-10-03 | Bidner David Karl | Vehicle drive control for 4X4 mode |
| US20020147540A1 (en) | 2001-01-08 | 2002-10-10 | Vild Chris T. | Braking system for increased control and braking effectiveness on slippery or icy surfaces |
| US20020189841A1 (en) | 2001-06-14 | 2002-12-19 | Patterson Jack D. | Connectionless data link assembly |
| US6499552B2 (en) | 2001-06-01 | 2002-12-31 | Meritor Heavy Vehicle Technology, L.L.C. | Drive axle control system |
| US6503170B1 (en) * | 1999-08-20 | 2003-01-07 | Toyota Jidosha Kabushiki Kaisha | Control device for an automatic transmission |
| US6519517B1 (en) | 1999-04-12 | 2003-02-11 | Kinetic Pty. Ltd. | Active ride control for a vehicle suspension system |
| US6532841B2 (en) * | 2000-08-01 | 2003-03-18 | Magneti Marelli Powertrain S.P.A. | Gear selector device for automatic transmission |
| US6556909B2 (en) * | 2000-04-25 | 2003-04-29 | Nissan Motor Co., Ltd. | Lane keep control for vehicle |
| US6564140B2 (en) | 2000-08-03 | 2003-05-13 | Fuji Jukogyo Kabushiki Kaisha | Vehicle dynamics control system and vehicle having the vehicle dynamics control system |
| US6561017B1 (en) | 2001-12-04 | 2003-05-13 | Dana Corporation | Tire inflation method |
| US6571162B2 (en) | 2000-02-23 | 2003-05-27 | Aisin Aw Co., Ltd. | Controller for automatic transmission |
| US6577334B1 (en) * | 1998-02-18 | 2003-06-10 | Kabushikikaisha Equos Research | Vehicle control |
| US6584385B1 (en) * | 1999-10-01 | 2003-06-24 | Innovative Design Solutions, Inc. | Vehicle leveling assembly |
| US6591937B2 (en) * | 2001-12-05 | 2003-07-15 | Delphi Technologies, Inc. | Adaptive variable effort power steering system |
| SE521017C2 (en) | 2002-01-11 | 2003-09-23 | Saab Automobile | Vehicle control system and method for controlling the same and driver interface with dashboard |
| US6636787B2 (en) * | 2001-03-30 | 2003-10-21 | Aisin Aw Co., Ltd. | Apparatus, method, and program for drivingly controlling hybrid vehicles |
| US6654671B2 (en) * | 2002-02-15 | 2003-11-25 | Delphi Technologies, Inc. | Vehicle rollover detection having variable sensitivity |
| US6665597B1 (en) * | 2003-02-27 | 2003-12-16 | Hwh Corporation | Automatic suspension control system for motor vehicles |
| US6722669B1 (en) * | 2000-05-18 | 2004-04-20 | John C. Stammreich | Adjustable suspension system for a vehicle |
| US6843159B2 (en) * | 2001-03-14 | 2005-01-18 | Ordnance Development And Engineering Company Of Singapore | Mobile artillery system |
| US6850830B2 (en) | 2000-03-30 | 2005-02-01 | Honda Giken Kogyo Kabushiki Kaisha | Driving force control system for four-wheel drive vehicles |
| US6868719B1 (en) | 2001-12-04 | 2005-03-22 | Dana Corporation | Tire pressure monitoring method |
| US6873898B1 (en) | 2000-06-15 | 2005-03-29 | Continental Teves, Inc. | Vehicle control system utilizing gps data |
| US6873891B2 (en) | 2000-05-23 | 2005-03-29 | Daimlerchrysler Ag | Method and device for co-ordinating multiple driving system devices of a vehicle |
| US6880856B2 (en) * | 2001-08-23 | 2005-04-19 | General Motors Corporation | Vehicle body configurations |
| US6885920B2 (en) | 1999-07-30 | 2005-04-26 | Oshkosh Truck Corporation | Control system and method for electric vehicle |
| US6894607B1 (en) | 2001-12-03 | 2005-05-17 | Dana Corporation | Tire pressure management system valve integrity verification method |
| US6898513B2 (en) * | 2003-03-15 | 2005-05-24 | Alpine Electronics, Inc. | Navigation method and system for dynamic access to different degrees of navigation function |
| US7070019B2 (en) * | 2001-06-21 | 2006-07-04 | Yamaha Motor Corporation Usa | Power assisted steering for all terrain vehicle |
-
2003
- 2003-03-29 EP EP03252006A patent/EP1355209A1/en not_active Withdrawn
- 2003-04-17 US US10/249,551 patent/US7349776B2/en not_active Ceased
-
2018
- 2018-04-10 US US15/949,385 patent/USRE49258E1/en not_active Expired - Lifetime
Patent Citations (195)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3580354A (en) * | 1967-09-01 | 1971-05-25 | Harlan Douglas Hewitt | Vehicle tilt compensator |
| US3645315A (en) * | 1969-10-31 | 1972-02-29 | Goodrich Co B F | All terrain vehicle tires |
| US4196940A (en) * | 1972-06-27 | 1980-04-08 | Texas Instruments Incorporated | Differentiator and variable threshold gate circuit for vehicle skid control brake system |
| US4060285A (en) * | 1972-06-27 | 1977-11-29 | Texas Instruments Incorporated | Brake control logic circuit for vehicle skid control brake system |
| US3982793A (en) * | 1972-06-27 | 1976-09-28 | Texas Instruments Incorporated | Vehicle skid control system |
| US4085697A (en) * | 1976-02-24 | 1978-04-25 | Johannes Leonardus Gaasenbeek | All-terrain vehicle |
| US4215593A (en) * | 1976-10-25 | 1980-08-05 | Nissan Motor Company, Limited | Transfer case for automotive vehicles |
| US4172588A (en) * | 1978-03-15 | 1979-10-30 | James K. Gilman | Damping system for vehicular suspension |
| US4372407A (en) | 1978-08-17 | 1983-02-08 | Owens-Illinois, Inc. | Independent steering and propulsion system for off road vehicle |
| US4418737A (en) | 1981-07-31 | 1983-12-06 | Am General Corporation | Automatic tire inflation system |
| US4651290A (en) | 1983-06-16 | 1987-03-17 | Nippondenso Co., Ltd. | Road condition discriminating system |
| GB2154763A (en) | 1984-02-07 | 1985-09-11 | Nissan Motor | Output torque dependent throttle control system for internal combustion engine |
| US4619303A (en) | 1984-06-04 | 1986-10-28 | Eaton Corporation | Vehicle air system including central tire inflation system |
| US4640331A (en) | 1984-06-04 | 1987-02-03 | Eaton Corporation | Central tire inflation system |
| US4602696A (en) | 1984-06-12 | 1986-07-29 | Toyota Jidosha Kabushiki Kaisha | Control system for selectively switchable two/four wheel drive automatic transmission system providing shifting characteristic matched to driving condition |
| US4576065A (en) | 1984-09-12 | 1986-03-18 | Eaton Corporation | Automatic transmission controls with multiple downshift off-highway mode |
| US4569255A (en) | 1984-09-12 | 1986-02-11 | Eaton Corporation | Automatic transmission controls with off-highway mode |
| US4592442A (en) * | 1984-11-29 | 1986-06-03 | International Harvester Company | Control system for a vehicle with two speed rear axle and single speed front axle drive |
| US4719819A (en) * | 1985-02-18 | 1988-01-19 | Suzuki Motor Company Limited | Power transmission system for a vehicle |
| US4760893A (en) | 1985-10-22 | 1988-08-02 | Robert Bosch Gmbh | Method of controlling slipping or spinning of a vehicle wheel |
| US4922427A (en) | 1986-11-28 | 1990-05-01 | Nissan Motor Company, Limited | Combined power steering and variable suspension control arrangement |
| US4829434A (en) * | 1987-04-29 | 1989-05-09 | General Motors Corporation | Adaptive vehicle |
| US5313995A (en) | 1987-06-29 | 1994-05-24 | Eaton Corporation | Central tire inflation system |
| US4856477A (en) | 1987-07-24 | 1989-08-15 | Nissan Motor Company, Limited | Throttle control system for automotive internal combustion engine with fail-safe mechanism |
| US5046009A (en) * | 1987-11-05 | 1991-09-03 | Nissan Motor Company, Limited | Slip suppressive drive control system for automotive vehicle with reduction of power output of internal combustion engine |
| US4936404A (en) | 1987-12-22 | 1990-06-26 | Fuji Jukogyo Kabushiki Kaisha | Vehicle traction control system providing two or more different drive modes at the driver's option |
| DE3817495A1 (en) | 1988-05-21 | 1989-11-30 | Bayerische Motoren Werke Ag | Motor vehicle with user-specific, adjustable, electronically controllable functions |
| US4898216A (en) | 1988-05-25 | 1990-02-06 | Eaton Corporation | CTIS control system and method for sensing and indication of inadequate rate of change of tire inflation pressurization |
| US5121774A (en) | 1988-05-25 | 1992-06-16 | Eaton Corporation | Fault detection method |
| US5409045A (en) | 1988-07-25 | 1995-04-25 | Eaton Corporation | Deflating control system and method |
| US5249609A (en) | 1988-07-25 | 1993-10-05 | Eaton Corporation | Deflation control system and method |
| EP0352921B1 (en) | 1988-07-25 | 1993-11-24 | Eaton Corporation | Deflation control system and method |
| US4924926A (en) | 1988-08-15 | 1990-05-15 | Eaton Corporation | Central tire inflation system |
| US5247831A (en) * | 1988-11-18 | 1993-09-28 | Fioravanti S.R.L. | Method and system for monitoring the tire footprints of a motor vehicle, particularly for automatically optimizing the behavior of the motor vehicle |
| US4987937A (en) | 1989-07-03 | 1991-01-29 | Eaton Corporation | In-tire filter assembly for central tire inflation system |
| US5410447A (en) | 1990-04-27 | 1995-04-25 | Kabushiki Kaisha Toshiba | Portable computer comprising keyboard and coordinate input tablet connected by two perpendicularly arranged hinges |
| US5253931A (en) | 1990-09-03 | 1993-10-19 | Wabco Westinghouse Fahrzeugbremsen Gmbh | Control logic for an anti-lock vehicle brake system |
| US5067778A (en) | 1990-11-19 | 1991-11-26 | Testardi David A | High performance anti-lock brake system for original equipment and after-market applications |
| JPH04257759A (en) | 1991-02-12 | 1992-09-11 | Nissan Motor Co Ltd | Brake control device for vehicle |
| US5410477A (en) | 1991-03-22 | 1995-04-25 | Hitachi, Ltd. | Control system for an automotive vehicle having apparatus for predicting the driving environment of the vehicle |
| US5355748A (en) | 1991-05-31 | 1994-10-18 | Ntn Corporation | Rotation transmitting device for an interaxle gearless differential |
| JPH054529A (en) | 1991-06-27 | 1993-01-14 | Mazda Motor Corp | Differential limit device for vehicle |
| US5275254A (en) | 1991-06-27 | 1994-01-04 | Mazda Motor Corporation | Control system for four-wheel drive vehicle |
| JPH054530A (en) | 1991-06-27 | 1993-01-14 | Mazda Motor Corp | Differential limit device for vehicle |
| US5289895A (en) | 1991-06-27 | 1994-03-01 | Mazda Motor Corporation | Control system for vehicle with differential restricting device |
| US5366041A (en) * | 1991-06-27 | 1994-11-22 | Mazda Motor Corporation | Vehicle control system |
| JPH054531A (en) | 1991-06-27 | 1993-01-14 | Mazda Motor Corp | Control device for vehicle |
| US5327346A (en) | 1991-08-23 | 1994-07-05 | Harsco Corporation | Automatic control for central tire inflation system |
| JPH0571375A (en) | 1991-09-09 | 1993-03-23 | Mazda Motor Corp | Device and method for controlling power train of vehicle |
| US5309969A (en) | 1991-12-17 | 1994-05-10 | Chander Mittal | Apparatus for repeatable adjustment of tire pressure |
| US5540268A (en) | 1991-12-17 | 1996-07-30 | Mittal; Chander | Apparatus for repeatable adjustment of tire pressure |
| US5303794A (en) | 1991-12-17 | 1994-04-19 | Ford Motor Company | Wheel spin control using electronically controlled clutches and engine controls |
| US5373447A (en) | 1992-01-10 | 1994-12-13 | Lucas Industries | Method of and apparatus for vehicle traction control by detecting wheel spin |
| JPH05213084A (en) | 1992-02-06 | 1993-08-24 | Mazda Motor Corp | Limited slip differential for vehicle |
| US5373912A (en) | 1992-02-06 | 1994-12-20 | Mazda Motor Corporation | Control system for restrictively controlling electromagnetically controlled differential |
| US5390117A (en) | 1992-06-30 | 1995-02-14 | Siemens Aktiengesellschaft | Transmission control with a fuzzy logic controller |
| US5278761A (en) | 1992-11-12 | 1994-01-11 | Ford Motor Company | Method for vehicular wheel spin control that adapts to different road traction characteristics |
| GB2273580A (en) | 1992-12-17 | 1994-06-22 | Ford Motor Co | Methods and apparatus for controlling operating subsystems of a motor vehicle |
| US5513107A (en) | 1992-12-17 | 1996-04-30 | Ford Motor Company | Methods and apparatus for controlling operating subsystems of a motor vehicle |
| US5263524A (en) | 1992-12-28 | 1993-11-23 | Eaton Corporation | Trailer detection control for vehicle central tire inflation system |
| US5487002A (en) * | 1992-12-31 | 1996-01-23 | Amerigon, Inc. | Energy management system for vehicles having limited energy storage |
| US5651593A (en) | 1993-02-17 | 1997-07-29 | Shitani; Yuji | Control device for an automotive vehicle having an antiskid brake system and differentials |
| US5470135A (en) | 1993-02-17 | 1995-11-28 | Mazda Motor Corporation | Control device for an automotive vehicle having an antiskid brake system and differentials |
| JPH06297975A (en) | 1993-02-17 | 1994-10-25 | Mazda Motor Corp | Control device for vehicle with differential limiting device and anti-skid brake |
| US5546308A (en) | 1993-02-19 | 1996-08-13 | Toyota Jidosha Kabushiki Kaisha | Apparatus for controlling vehicle speed in response to a road holding ability change |
| JPH06286436A (en) | 1993-03-30 | 1994-10-11 | Mazda Motor Corp | Vehicle controller |
| JPH06321026A (en) | 1993-05-17 | 1994-11-22 | Mazda Motor Corp | Vehicular controller, vehicular control gain changing device and control gain changing method |
| JPH079977A (en) | 1993-06-29 | 1995-01-13 | Mazda Motor Corp | Controller for vehicle |
| JPH079978A (en) | 1993-06-29 | 1995-01-13 | Mazda Motor Corp | Controller for vehicle |
| JPH079976A (en) | 1993-06-29 | 1995-01-13 | Mazda Motor Corp | Controller for vehicle |
| US5652655A (en) | 1993-06-29 | 1997-07-29 | Omron Corporation | Road surface discriminator and apparatus applying same |
| US6205374B1 (en) | 1993-07-01 | 2001-03-20 | Mazda Motor Corporation | Vehicle characteristic change system and method |
| US5406861A (en) | 1993-09-22 | 1995-04-18 | Eaton Corporation | Manual modification of automatic mode shift points |
| US5566582A (en) * | 1993-11-05 | 1996-10-22 | Rover Group Limited | Selector mechanism for a vehicle transmission |
| US5586028A (en) | 1993-12-07 | 1996-12-17 | Honda Giken Kogyo Kabushiki Kaisha | Road surface condition-detecting system and anti-lock brake system employing same |
| US5436835A (en) * | 1994-03-04 | 1995-07-25 | Emry; Lewis D. | Motor vehicle collision avoidance method and means |
| US6173226B1 (en) * | 1994-06-06 | 2001-01-09 | Hitachi, Ltd. | Control apparatus and method for powertrain of a vehicle |
| US5701247A (en) | 1994-06-17 | 1997-12-23 | Nissan Motor Co., Ltd. | Integrated control system for 4WD vehicles for controlling driving torque distribution |
| KR960011082A (en) | 1994-09-02 | 1996-04-20 | 가나이 쯔도무 | Power Train Control Device and Control Method |
| US5776031A (en) | 1994-09-02 | 1998-07-07 | Hitachi, Ltd. | Power train controller and control method |
| US5906560A (en) | 1994-09-02 | 1999-05-25 | Hitachi, Ltd. | Power train controller and control method |
| US5620393A (en) | 1994-09-02 | 1997-04-15 | Hitachi, Ltd. | Power train controller and control method |
| US5487596A (en) | 1994-09-09 | 1996-01-30 | Kelsey-Hayes Company | Method and system for controlling rear wheel anti-lock brake control on four-wheel drive vehicles braking on high mu surfaces |
| US5839084A (en) * | 1994-09-21 | 1998-11-17 | Nissan Motor Co., Ltd. | Driving-torque control system for four-wheel-drive vehicle |
| US5471386A (en) | 1994-10-03 | 1995-11-28 | Ford Motor Company | Vehicle traction controller with torque and slip control |
| US5941614A (en) | 1994-10-12 | 1999-08-24 | Rover Group Limited | Wheeled vehicle |
| US5524481A (en) | 1994-10-27 | 1996-06-11 | Eaton Corporation | Measure wet tank routine comparing its pressure to that of associated tire(s) |
| US5593176A (en) | 1994-12-16 | 1997-01-14 | Ford Motor Company | Ride height setting based on transfer case setting |
| US5629873A (en) | 1995-03-08 | 1997-05-13 | Cm Automotive Systems Inc | Distributed intelligence vehicular tire air pressurization system and method |
| US5629874A (en) | 1995-03-08 | 1997-05-13 | Cm Automotive Systems Inc. | Vehicular tire air pressurization system and method |
| US5796344A (en) * | 1995-03-21 | 1998-08-18 | Sprague Controls, Inc. | Imminent icing condition enunciator |
| US6166657A (en) * | 1995-03-21 | 2000-12-26 | Commercial Vehicle Systems, Inc. | Imminent icing condition enunciator |
| US6035734A (en) | 1995-04-03 | 2000-03-14 | Magneti Marelli France | Control system imposing automatic mode absent driver manual shift request |
| JPH0932899A (en) | 1995-07-17 | 1997-02-04 | Nissan Motor Co Ltd | Speed change control device for variable speed change gear |
| US5803197A (en) | 1995-08-11 | 1998-09-08 | Nissan Motor Co., Ltd. | Torque-split control system for four-wheel-drive vehicles |
| GB2304835A (en) | 1995-09-07 | 1997-03-26 | Rover Group | Control of gearshifting in an automatic transmission in series with a manual range gearbox |
| US5911771A (en) | 1995-09-29 | 1999-06-15 | Bayerische Motoren Werke Aktiengesellschaft | Gear shift control for automatic transmissions in motor vehicles having an electronic control unit |
| US5890078A (en) | 1995-11-30 | 1999-03-30 | Mitsubishi Denki Kabushiki Kaisha | Synthetic control system for automobile |
| US5906645A (en) | 1995-12-04 | 1999-05-25 | Toyota Jidosha Kabushiki Kaisha | Auto-drive control unit for vehicles |
| US5980415A (en) | 1995-12-11 | 1999-11-09 | Borg-Warner Automotive, Inc. | Adaptive transfer case with EM clutch and dog clutch for 4WD lock up |
| KR0172685B1 (en) | 1995-12-29 | 1999-02-18 | 김태구 | Suspension system for a vehicle |
| US6312066B1 (en) * | 1996-01-17 | 2001-11-06 | Itt Manufacturing Enterprises, Inc. | Method for improving the regulation behavior of an ABS system in off-the-road driving |
| US6044318A (en) * | 1996-01-25 | 2000-03-28 | Rover Group Limited | Powertrain control system |
| US6002979A (en) * | 1996-02-16 | 1999-12-14 | Nissan Motor Co., Ltd. | Traction control system for automotive vehicles |
| US5991682A (en) * | 1996-02-21 | 1999-11-23 | Nissan Motor Co., Ltd. | Apparatus and method for controlling driving force derived from internal combustion engine to road wheel of automotive vehicle |
| US6070118A (en) | 1996-03-15 | 2000-05-30 | Toyota Jidosha Kabushiki Kaisha | Transmission control system using road data to control the transmission |
| US5983154A (en) | 1996-03-22 | 1999-11-09 | Toyota Jidosha Kabushiki Kaisha | Control system for automatic transmission having plural running modes |
| US6278928B1 (en) | 1996-04-12 | 2001-08-21 | Kabushikikaisha Equos Research | Transmission control device responsive to road information |
| KR970070422A (en) | 1996-04-12 | 1997-11-07 | 김영귀 | Valve seat fastening structure |
| US5984034A (en) * | 1996-05-02 | 1999-11-16 | Toyota Jidosha Kabushiki Kaisha | Hybrid vehicle |
| US6188945B1 (en) | 1996-09-12 | 2001-02-13 | Siemens Aktiengesellschaft | Drive train control for a motor vehicle |
| US6098994A (en) | 1996-09-25 | 2000-08-08 | Toyota Jidosha Kabushiki Kaisha | Vehicle height control apparatus |
| US6085137A (en) | 1996-10-25 | 2000-07-04 | Kabushikikaisha Equos Research | Vehicle control device |
| US5886650A (en) | 1996-10-31 | 1999-03-23 | Mitsumi Electric Co., Ltd. | Car navigation system with FM multi-broadcast signal receiving function |
| GB2329731A (en) | 1996-11-19 | 1999-03-31 | Nissan Motor | Vehicle drive force controller |
| US6016457A (en) | 1996-11-19 | 2000-01-18 | Nissan Motor Co., Ltd. | Vehicle drive force controller |
| US6125314A (en) | 1996-11-20 | 2000-09-26 | Siemens Aktiengesellschaft | Drive train controller for a motor vehicle |
| US5997108A (en) | 1996-11-23 | 1999-12-07 | Wabco Gmbh | Process for controlling the speed of a vehicle travelling on a slope |
| US6268825B1 (en) | 1996-11-25 | 2001-07-31 | Toyota Jidosha Kabushiki Kaisha | Navigation device for vehicle and preparation of road shape data used therefor |
| US6095945A (en) | 1997-01-24 | 2000-08-01 | Siemens Aktiengesellschaft | Combined engine and transmission control for a motor vehicle |
| US6009355A (en) | 1997-01-28 | 1999-12-28 | American Calcar Inc. | Multimedia information and control system for automobiles |
| US6255963B1 (en) | 1997-02-04 | 2001-07-03 | Mannesmann Ag | Method for transmitting traffic information and devices for implementing said method |
| US6428024B1 (en) | 1997-02-18 | 2002-08-06 | Kinetic Limited | Control arrangement for vehicle suspension system |
| JPH10272955A (en) | 1997-03-31 | 1998-10-13 | Mitsubishi Motors Corp | Four-wheel drive vehicle |
| US6076898A (en) | 1997-04-18 | 2000-06-20 | Aisin Seiki Kabushiki Kaisha | Braking control system for a four-wheel drive vehicle |
| US6231480B1 (en) * | 1997-05-12 | 2001-05-15 | Mazda Motor Corporation | Lockup control system for fluid coupling of automatic transmission |
| US6324461B1 (en) * | 1997-06-27 | 2001-11-27 | Kabushiki Kaisha Toyota Chuo Kenkyusho | Road surface condition estimating apparatus and variation reduction processing apparatus |
| US5979584A (en) * | 1997-07-25 | 1999-11-09 | Ford Global Technologies, Inc. | Four-wheel drive transfer case controller |
| US6094614A (en) * | 1997-08-26 | 2000-07-25 | Fuji Jukogyo Kabushiki Kaisha | Driving force distribution control system and road friction coefficient estimating apparatus |
| US6007454A (en) * | 1997-11-05 | 1999-12-28 | Toyota Jidosha Kabushiki Kaisha | Traction control device of automobile automatically adapted for high and low gear driving |
| US6161643A (en) * | 1997-12-10 | 2000-12-19 | Daimlerchrysler Corporation | System of controlling torque transfer in a motor vehicle and related method |
| US6266603B1 (en) * | 1997-12-22 | 2001-07-24 | Renault | Method for detecting slippery surfaces and blocked vehicle wheels, automatic transmission implementing the method and vehicle equipped with same |
| US6086071A (en) * | 1998-01-02 | 2000-07-11 | Chrysler Corporation | Adjustable suspension system for a motor vehicle |
| GB2334700A (en) | 1998-01-26 | 1999-09-01 | Racelogic Ltd | A vehicle speed controller |
| US6577334B1 (en) * | 1998-02-18 | 2003-06-10 | Kabushikikaisha Equos Research | Vehicle control |
| JPH11311332A (en) | 1998-04-24 | 1999-11-09 | Fuji Heavy Ind Ltd | Shift step position display unit for automatic transmission |
| JPH11325234A (en) | 1998-05-19 | 1999-11-26 | Toyota Motor Corp | Control device for vehicle |
| DE19834167A1 (en) | 1998-07-29 | 2000-02-03 | Volkswagen Ag | Method and device for adapting the braking power to current wheel-road-traction conditions |
| EP0976629A2 (en) | 1998-07-29 | 2000-02-02 | Volkswagen Aktiengesellschaft | Procedure and device for brake performance adaptation at momentary wheel - road -adhesion conditions |
| US6233514B1 (en) | 1998-08-08 | 2001-05-15 | Wabco Gmbh | Method for controlling the downhill speed of an off-the-road vehicle |
| US6263262B1 (en) | 1998-08-24 | 2001-07-17 | Robert Bosch Gmbh | Vehicle control system |
| US6263282B1 (en) * | 1998-08-27 | 2001-07-17 | Lucent Technologies, Inc. | System and method for warning of dangerous driving conditions |
| US6213242B1 (en) | 1998-08-31 | 2001-04-10 | Ashok Rodrigues | Four wheel drive system having torque distribution control responsive to throttle position, speed and selected range |
| EP0983894A2 (en) | 1998-09-02 | 2000-03-08 | Rover Group Limited | Vehicle speed control using engine and brake systems to achieve target acceleration |
| US6182002B1 (en) | 1998-10-26 | 2001-01-30 | General Motors Corporation | Vehicle acceleration based traction control |
| US6144295A (en) | 1998-12-11 | 2000-11-07 | Case Corporation | Automatic central tire inflation system |
| US6116105A (en) | 1999-01-14 | 2000-09-12 | Eaton Corporation | Method/system for controlling upshifting after resetting the value of a control parameter indicative of gross combined weight of vehicles |
| EP1028011A2 (en) | 1999-02-13 | 2000-08-16 | Rover Group Limited | A user interface unit for a vehicle |
| US6260859B1 (en) | 1999-02-13 | 2001-07-17 | Rover Group Limited | User interface unit for a vehicle |
| US6266602B1 (en) | 1999-02-18 | 2001-07-24 | Unisia Jecs Corporation | Road surface condition determination system for automotive vehicles and anti-skid braking system having the same |
| US6250327B1 (en) | 1999-02-25 | 2001-06-26 | Dana Corporation | Fluid flow valve with variable flow rate |
| US6427714B2 (en) | 1999-02-25 | 2002-08-06 | Dana Corporation | Fluid flow valve with variable flow rate |
| US6519517B1 (en) | 1999-04-12 | 2003-02-11 | Kinetic Pty. Ltd. | Active ride control for a vehicle suspension system |
| JP2000344083A (en) | 1999-06-07 | 2000-12-12 | Toyota Motor Corp | Traction control device for vehicle |
| US6293632B1 (en) | 1999-06-11 | 2001-09-25 | John F. Grote | Vehicular brake-by-wire system |
| US6885920B2 (en) | 1999-07-30 | 2005-04-26 | Oshkosh Truck Corporation | Control system and method for electric vehicle |
| FR2796893A1 (en) | 1999-07-30 | 2001-02-02 | Renault | Autoadaptive control system for propulsion unit of motor vehicle to provide adaptation of control of engine and transmission to different driving styles |
| US6421593B1 (en) | 1999-07-30 | 2002-07-16 | Pierce Manufacturing Inc. | Military vehicle having cooperative control network with distributed I/O interfacing |
| US6202020B1 (en) * | 1999-08-20 | 2001-03-13 | Meritor Heavy Vehicle Systems, Llc | Method and system for determining condition of road |
| US6503170B1 (en) * | 1999-08-20 | 2003-01-07 | Toyota Jidosha Kabushiki Kaisha | Control device for an automatic transmission |
| US6409287B1 (en) * | 1999-08-24 | 2002-06-25 | Mazda Motor Corporation | Yaw controlling apparatus for an automobile |
| GB2353872A (en) | 1999-08-28 | 2001-03-07 | Roke Manor Research | Vehicle drive control, speed warning and navigation apparatus |
| US6205389B1 (en) | 1999-09-16 | 2001-03-20 | Eaton Corporation | Method/system for resetting the value of a control parameter indicative of gross combine weight of vehicles to a default value thereof |
| US6584385B1 (en) * | 1999-10-01 | 2003-06-24 | Innovative Design Solutions, Inc. | Vehicle leveling assembly |
| GB2357159A (en) | 1999-12-07 | 2001-06-13 | Rover Group | Terrain responsive control system for land vehicle |
| US6571162B2 (en) | 2000-02-23 | 2003-05-27 | Aisin Aw Co., Ltd. | Controller for automatic transmission |
| US6850830B2 (en) | 2000-03-30 | 2005-02-01 | Honda Giken Kogyo Kabushiki Kaisha | Driving force control system for four-wheel drive vehicles |
| US6556909B2 (en) * | 2000-04-25 | 2003-04-29 | Nissan Motor Co., Ltd. | Lane keep control for vehicle |
| US6722669B1 (en) * | 2000-05-18 | 2004-04-20 | John C. Stammreich | Adjustable suspension system for a vehicle |
| US6873891B2 (en) | 2000-05-23 | 2005-03-29 | Daimlerchrysler Ag | Method and device for co-ordinating multiple driving system devices of a vehicle |
| US6873898B1 (en) | 2000-06-15 | 2005-03-29 | Continental Teves, Inc. | Vehicle control system utilizing gps data |
| US6532841B2 (en) * | 2000-08-01 | 2003-03-18 | Magneti Marelli Powertrain S.P.A. | Gear selector device for automatic transmission |
| US6564140B2 (en) | 2000-08-03 | 2003-05-13 | Fuji Jukogyo Kabushiki Kaisha | Vehicle dynamics control system and vehicle having the vehicle dynamics control system |
| US20040036601A1 (en) | 2000-09-21 | 2004-02-26 | Obradovich Michael L | Technique for operating a vehicle effectively and safely |
| WO2002025291A2 (en) | 2000-09-21 | 2002-03-28 | American Calcar Inc. | Technique for operating a vehicle effectively and safely |
| WO2002026519A2 (en) | 2000-09-28 | 2002-04-04 | Luk Lamellen Und Kupplungsbau Beteiligungs Kg | Method for altering the shift characteristics of an automated shifting gearbox and corresponding device |
| US20020147540A1 (en) | 2001-01-08 | 2002-10-10 | Vild Chris T. | Braking system for increased control and braking effectiveness on slippery or icy surfaces |
| US20020143455A1 (en) | 2001-02-01 | 2002-10-03 | Bidner David Karl | Vehicle drive control for 4X4 mode |
| US6843159B2 (en) * | 2001-03-14 | 2005-01-18 | Ordnance Development And Engineering Company Of Singapore | Mobile artillery system |
| US6636787B2 (en) * | 2001-03-30 | 2003-10-21 | Aisin Aw Co., Ltd. | Apparatus, method, and program for drivingly controlling hybrid vehicles |
| US6578648B2 (en) | 2001-06-01 | 2003-06-17 | Meritor Heavy Vehicle Technology, Llc | Drive axle control system |
| US6499552B2 (en) | 2001-06-01 | 2002-12-31 | Meritor Heavy Vehicle Technology, L.L.C. | Drive axle control system |
| US20020189841A1 (en) | 2001-06-14 | 2002-12-19 | Patterson Jack D. | Connectionless data link assembly |
| US7070019B2 (en) * | 2001-06-21 | 2006-07-04 | Yamaha Motor Corporation Usa | Power assisted steering for all terrain vehicle |
| US6880856B2 (en) * | 2001-08-23 | 2005-04-19 | General Motors Corporation | Vehicle body configurations |
| US6894607B1 (en) | 2001-12-03 | 2005-05-17 | Dana Corporation | Tire pressure management system valve integrity verification method |
| US6561017B1 (en) | 2001-12-04 | 2003-05-13 | Dana Corporation | Tire inflation method |
| US6868719B1 (en) | 2001-12-04 | 2005-03-22 | Dana Corporation | Tire pressure monitoring method |
| US6591937B2 (en) * | 2001-12-05 | 2003-07-15 | Delphi Technologies, Inc. | Adaptive variable effort power steering system |
| SE521017C2 (en) | 2002-01-11 | 2003-09-23 | Saab Automobile | Vehicle control system and method for controlling the same and driver interface with dashboard |
| US20050203684A1 (en) | 2002-01-11 | 2005-09-15 | Goran Borgesson | Vehicle control system and method of controlling such |
| US20090228175A1 (en) | 2002-01-11 | 2009-09-10 | Goran Borgesson | Vehicle control system and method of controlling such |
| US6654671B2 (en) * | 2002-02-15 | 2003-11-25 | Delphi Technologies, Inc. | Vehicle rollover detection having variable sensitivity |
| US6665597B1 (en) * | 2003-02-27 | 2003-12-16 | Hwh Corporation | Automatic suspension control system for motor vehicles |
| US6898513B2 (en) * | 2003-03-15 | 2005-05-24 | Alpine Electronics, Inc. | Navigation method and system for dynamic access to different degrees of navigation function |
Non-Patent Citations (329)
| Title |
|---|
| "Idolwild: BMW M3 v Evo VII," Car Magazine, EMAP Automotive Ltd, Jun. 2001, 15 pages. |
| "Lancer Evolution vol. II," Rippu Best Mook LEVOLANT Perfect Guide by Car Model 30, May 13, 2001, 16 pages. |
| "Lancer Evolution/Impreza 4WD Turbo", Oct. 27, 2001, 16 pages. (Translation included). |
| "Mental Oriental," Autocar Magazine, vol. 228, No. 11 (5438), Jun. 13, 2001, 11 pages. |
| "Mitsubishi Evo Extreme," Autocar Magazine, vol. 229, No. 7 (5447), Aug. 15, 2001, 9 pages. |
| "Quick Test: BMW 740i Sport;" Motor Trend Magazine, Peterson Publishing Company, LLC, Jun. 1999, 4 pages. |
| "Respondents ▮ Response to the Complaint and Notice of Investigation"—Part A, Dr. Ing. H.C. F. Porsche AG, Porsche Cars North America, Inc., Volkswagen AG, Volkswagen Group Of America, Inc., Automobili Lamborghini S.P.A, Automobili Lamborghini America, LLC, Audi AG, and Audi Of America, LLC, In the Matter of Certain Vehicle Controls Systems, Vehicles Containing The Same, And Components Thereof, Investigation No. 337-TA-1235, dated Jan. 27, 2021, 227 pages. |
| "Respondents ▮ Response to the Complaint and Notice of Investigation"—Part B, Dr. Ing. H.C. F. Porsche AG, Porsche Cars North America, Inc., Volkswagen AG, Volkswagen Group Of America, Inc., Automobili Lamborghini S.P.A, Automobili Lamborghini America, LLC, Audi AG, and Audi Of America, LLC, In the Matter of Certain Vehicle Controls Systems, Vehicles Containing The Same, And Components Thereof, Investigation No. 337-TA-1235, dated Jan. 27, 2021, 190 pages. |
| "Respondents ▮ Response to the Complaint and Notice of Investigation"—Part C, Dr. Ing. H.C. F. Porsche AG, Porsche Cars North America, Inc., Volkswagen AG, Volkswagen Group Of America, Inc., Automobili Lamborghini S.P.A, Automobili Lamborghini America, LLC, Audi AG, and Audi Of America, LLC, In the Matter of Certain Vehicle Controls Systems, Vehicles Containing The Same, And Components Thereof, Investigation No. 337-TA-1235, dated Jan. 27, 2021, 110 pages. |
| "Seven Samurai," Car Magazine, Apr. 2001, 12 pages. |
| "Seventh Heaven," Autocar Magazine, vol. 227, No. 7 (5421), Feb. 14, 2001, 6 pages. |
| "Survival of the fastest," Autocar Magazine, vol. 227, No. 10 (5424), Mar. 7, 2001, 10 pages. |
| 1999 Expedition Owner's Guide, Ford Motor Company, 1998, 216 pages. |
| 2000 Cadillac Escalade Owner's Manual, 1999, 339 pages. |
| 2000 Expedition Owner's Guide, Ford Motor Company, 1999, 256 pages. |
| 2000 Range Rover Owner's Handbook, Land Rover Group Limited, Publication No. LRL 0314ENG—3rd Edition, 210 pages. |
| 2000 Range Rover Owner's Manual, Land Rover Group Limited, 2000, 208 pages. |
| 2001 Chevrolet Silverado Owner's Manual, 2000, 468 pages. |
| 2001 Chevrolet Tahoe/Suburban Owner's Manual, 2000, 419 pages. |
| 2001 Expedition Owner's Guide, Ford Motor Company, 1999, 280 pages. |
| 2001 Freelander Owner's Manual, Rover Group Limited, 2000, 154 pages. |
| 2001 Mercedes-Benz M-Class Operator's Manual, Oct. 31, 2000, 317 pages. |
| 2002 BMW 745Li (E65) Owner's Manual, BMW, Oct. 2001, 208 pages. |
| 2002 Expedition Owner's Guide, Ford Motor Company, 2001, 280 pages. |
| 2002 Mercedes-Benz G-Class Operator's Manual, Sep. 21, 2001, 382 pages. |
| AAI Corporation, Final Report for the Concept Development of the Logistics Vehicle System Replacement, 1997, 133 pages. |
| Alan Freigang, SAE International, Application of the Eaton® Tire Pressure Control System to the Commercial Truck, Nov. 1994, 8 pages. |
| Andrews, Scott, "Opening Expert Report of Scott Andrews", redacted, The United States District Court For The Eastern District Of Virginia Norfolk Division, Case No. 2:18-cv-320-MSD-LRL, Aug. 13, 2020, 338 pages. |
| Andrews, Scott, "Reply Expert Report of Scott Andrews", redacted, The United States District Court For The Eastern District Of Virginia Norfolk Division, Case No. 2:18-cv-320-MSD-LRL, Sep. 24, 2020, 152 pages. |
| Appendix 21-A, "Porsche 959 Art Alone and in View of the Hummer H2 Art", dated Nov. 5, 2019, 27 pages. |
| Appendix 21-B, "GB2273580 in View of the Lancer Art Alone or in Combination with the Hummer H2 Art", dated Nov. 5, 2019, 34 pages. |
| Appendix 21-C, "Lancer Art, Alone or in Combination with GB '580, in View of the Active TracArt", dated Nov. 5, 2019, 30 pages. |
| Appendix 30-A, "Porsche 959 Art Alone and in View of Hummer H2 Art", dated Nov. 5, 2019, 11 pages. |
| Appendix 30-B, "GB '580 in View of the Lancer Art Alone or in Combination with Hummer H2 Art", dated Nov. 5, 2019, 10 pages. |
| Appendix 41-A, "Porsche 959 Art and Porsche 959 Art in View of the Ford Expedition, Range Rover, or GB '580", dated Nov. 5, 2019, 23 pages. |
| Appendix 41-B, "GB2273580 in View of the Lancer Art and U.S. Pat. No. 6,260,859", dated Nov. 5, 2019, 10 pages. |
| Appendix 43, "Porsche 959 Art and/or GB '580 in View of the Lancer Art Alone or in Combination with Hummer H2 Art and the Active Trac Art", dated Nov. 5, 2019, 11 pages. |
| Appendix 46, "Porsche 959 Art and/or GB '580 in View of the Lancer Art Alone or in Combination with U.S. Pat. No. 5,941,614, EP 0983894, or Rover Freelander", dated Nov. 5, 2019, 5 pages. |
| Auto.com, Auto123—Hummer H2 Concept Review, 2000, 6 pages. |
| AutoCar Magazine, Lancer Autocar Magazine Article, Jun. 13, 2001, 11 pages. |
| Autointell.com, Automotive Intelligence—General Motors Hummer H2, 2002, 5 pages (split into two parts: A, B). |
| AutoMobile Magazine, Lancer Automobile Magazine Article, May 2001, 8 pages. |
| AutoWeek Magazine, H2 Heavy Duty Concept Vehicle, May 2000, 7 pages. |
| Bentley Motors Limited and Bentley Motors, Inc., "Bentley's Memorandum in Opposition to JLR's Motion to Strike", The United States District Court For The Eastern District Of Virginia Norfolk Division, Case No. 2:18-cv-320, Aug. 14, 2020, 20 pages. |
| Bentley Motors Limited and Bentley Motors, Inc., "Defendants' Second Amended Preliminary Invalidity Contentions", The United States District Court For The Eastern District Of Virginia Norfolk Division, Case No. 2:18-cv-320-MSD-LRL, Jul. 30, 2020, 80 pages. |
| Bevly, David M., "Expert Declaration of David Bevly", Jan. 14, 2020, 47 pages. |
| Bevly, David M., "Expert Report of David Bevly", redacted, The United States District Court For The Eastern District Of Virginia Norfolk Division, Case No. 2:18-cv-320-MSD-LRL, Aug. 12, 2020, 19 pages. |
| Bevly, David M., "Reply Expert Report of David Bevly", redacted, The United States District Court For The Eastern District Of Virginia Norfolk Division, Case No. 2:18-cv-320-MSD-LRL, Sep. 24, 2020, 11 pages. |
| BMW Manual, BMW AG, Munich, Germany, 2000, 217 pages. |
| BMW, 2002 BMW X5 Owner's Manual, 2002, 183 pages. |
| BMW, BMW X5 Owner's Manual, 2002, 185 pages. |
| BMW, Press Kit Model Year 2002: X5, 2002, 7 pages. |
| BMW, Press Kit MY 2001. X5 FOR 2001: BMW's Sports Activity Vehicle Now Available in 6- and 8-Cylinder Models, 2001, 4 pages. |
| BMW, Supplementary Owner's Manual Suspension Level Control Advanced technology, 2001, 13 pages. |
| Brad DeLong, 4 Wheel Freedom: The Art of Off-Road Driving, 1996, 145 pages. |
| Brent Romans, Will the Real Trucks Please Stand Up?, 2001, 4 pages. |
| Car and Driver, Mitsubishi Lancer, Apr. 1, 2001, 5 pages. |
| Car Magazine, Lancer Car Magazine, Apr. 2001, 13 pages. |
| Center for Seabees and Facilities Engineering, Medium Tactical Vehicle Replacement (MTVR) Operators Course Trainee Guide, Mar. 2007, 202 pages. |
| Chassis, Lancer Best Car, 2001, 5 pages. |
| Christopher Jensen, Car and Driver Test—2003 Hummer H2, 2002, 10 pages. |
| Clive A McKenzie et al., SAE International, Ford Explorer Control Trac 4×4 System, 1995, 7 pages. |
| CM Automotive Systems Inc. CTI Controller, Model 102, 2 pages. |
| CMAutomotive Systems, Inc., The New Generation All Terrain Mobility, 2001, 2 pages. |
| Cranfield University, Whel and Track Study , Mar. 2000, 134 pages. |
| CTIS Eaton RoadRanger Link , 2003, 2 pages, available at https://web.archive.org/web/20030507005344/https://truck.eaton.com/na/dana_pdfs/axsl-0016.pdf, received on. |
| CTIS Eaton RoadRanger Link , 2003, 2 pages. |
| CTIS Overview, The New Generation All Terrain Mobility, 2001, 2 pages. |
| D. Mckay et al., "Delphi Electronic Throttle Control Systems for Model Year 2000; Driver Features, System Security, and OEM Benefits. ETC for the Mass Market", SAE The Engineering Society for Advancing Mobility Land Sea Air and Space, Mar. 2000, 13 pages. |
| D.A. Weeks et al., Electromechanical Active Suspension Demonstration for Off-Road Vehicles, 2000, 12 pages. |
| DaimlerChrysler, Jeep Compass, 2002, 33 pages. |
| Dana Corporation, 2000 Global Trade Show Schedule (Road Ranger), 2000, 7 pages, available at https://web.archive.org/web/20010217183949/https://www.dana.com/news/trade_shows/2000_global_trade_show_schedule.htm. |
| Dana Corporation, 2000 Global Trade Show Schedule (Road Ranger), Mar. 2000, 7 pages. |
| DANA Corporation, Dana Spicer Central Tire Inflation Systems Specifications, 2000, 2 pages. |
| Der Porsche Typ 959, Gruppe B-ein besondered Automobil, Teil 1, vol. 88, No. 5, Jun. 16, 1986, 24 pages. (Translation included). |
| Der Porsche Typ 959, Gruppe B-ein besondered Automobil, Teil 2, vol. 88, No. 6, Jun. 14, 1986, 16 pages. (Translation included). |
| Der Porsche Typ 959, Gruppe B-ein besondered Automobil, Teil 3, vol. 88, No. 7/8, Aug. 12, 1986, 22 pages. (Translation included). |
| Der Porsche Typ 959, Gruppe B-ein besondered Automobil, Teil 4, vol. 88, No. 9, Sep. 30, 1986, 18 pages. (Translation included). |
| Eaton Vorad, EVT-300 Collision Warning System with SmartCruise, 2000, 2 pages. |
| Edmunds.com, Inc., Edmunds 2000 North American International Auto Show—Concept Cars, 2000, 3 pages, available at https://web.archive.org/web/20010418091424/https://www.edmunds.com/news/autoshows/articles/42918/page008.html, accessed on Feb. 21, 2021. |
| Edmunds.com, Inc., Edmunds 2002 LA Auto Show—New Models, 2002, 2 pages (split into two parts: A, B). |
| Edmunds.com, Inc., Edmunds 2002 North American International Auto Show—New Models, 2002, 3 pages. |
| Edmunds.com, Inc., Edmunds 2003 Annual New Cars and Trucks Buyers Guide, 2003, 5 pages. |
| Edmunds.com, Inc., Edmunds 2003 Ford Expedition at 2002 North American International Auto Show, 2003, 4 pages. |
| Edmunds.com, Inc., Edmunds 2003 Ford Expedition Consumer Ratings and Reviews, 2003, 13 pages. |
| Edmunds.com, Inc., Edmunds 2003 Ford Expedition Dash , 2003, 1 pages. |
| Edmunds.com, Inc., Edmunds 2003 Hummer H2 at 2002 LA Auto Show , 2003, 3 pages. |
| Edmunds.com, Inc., Edmunds 2003 Hummer H2 Consumer Ratings and Reviews: All Reviews, 2003, 8 pages. |
| Edmunds.com, Inc., Edmunds 2003 Hummer H2 Dash , 2003, 1 page. |
| Edmunds.com, Inc., Edmunds First Drive Review 2003 Ford Expedition , 2003, 4 pages. |
| Expert Report of Carla S. Mulhern, United States International Trade Commission, Investigation 337-TA-1235, Washington, D.C., dated Jun. 24, 2021, 82 pages. |
| Expert Report of Gary Schmiedel Regarding the Oshkosh MTVR MK23 Reference, United States International Trade Commission, Investigation 337-TA-1235, Washington, D C., dated Jun. 23, 2021, 31 pages. |
| Expert Report of Greg Shaver, Ph. D. Regarding Invalidity, United States International Trade Commission, Investigation 337-TA-1235, Washington, D.C., dated Jun. 24, 2021, 1755 pages, submitted in three parts of 585 pages each. |
| Expert Report of Stephen G. Kunin Regarding the Expiration Date of RE46,828, United States International Trade Commission, Investigation 337-TA-1235, Washington, D.C., dated Jun. 24, 2021, 49 pages. |
| Flavio Franceschini, SAE International, Automotive Suspension Calibration, 2002, 10 pages. |
| Forbes, The Best Of The New York Auto Show, Apr. 15, 2001, 27 pages. |
| Ford Expedition Manual, 1997, 224 pages. |
| Ford Motor Company, 11997 Expedition Workshop Manual vol. II, 1997, 1307 pages (split into eight parts: A, B, C, D, E, F, G, H). |
| Ford Motor Company, 1996 Ford Explorer Owner's Manual, 1996, 444 pages. |
| Ford Motor Company, 1997 Expedition Electrical and Vacuum Troubleshooting Manual, 1997, 338 pages (split into two parts: A, B). |
| Ford Motor Company, 1997 Expedition Workshop Manual vol. 1, 1997, 2832 pages (split into eighteen parts: A, B, C, D, E, F, G, H, I, J, K, L, M, N, O, P, Q, R). |
| Ford Motor Company, 1997 Expedition Workshop Manual vol. 2, 1997, 1307 pages (split into eight parts: A, B, C, D, E, F, G, H). |
| Ford Motor Company, 1997 Expedition Workshop Manual vol. I, 1997, 2832 pages (split into eighteen parts: A, B, C, D, E, F, G, H, I, J, K, L, M, N, O, P, Q, R). |
| Ford Motor Company, 1997 Ford 4 Wheeling Supplement., 1997, 20 pages. |
| Ford Motor Company, 1997 Ford Expedition Electrical and Vacuum Troubleshooting Manual, 1997, 338 pages (split into two parts: A, B). |
| Ford Motor Company, 1997 Ford Expedition Owner's Guide, 1997, 119 pages. |
| Ford Motor Company, 1997 Ford Powertrain Control/Emissions Diagnosis 1997 Service Manual, 1997, 2413 pages (split into six parts: A, B, C, D, E, F). |
| Ford Motor Company, 2001 Ford Powertrain Manual, 2001, 1047 pages (split into five parts: A, B, C, D, E). |
| Ford Motor Company, 2003 Ford Expedition eSourcebook, 2003, 38 pages. |
| Ford Motor Company, 2003 Ford Expedition FordTraining Website, 2003, 3 pages. |
| Ford Motor Company, 2003 Ford Expedition Frontline Magazine, 2003, 11 pages. |
| Ford Motor Company, 2003 Ford Expedition Owner's Guide (Printing 1), 2003, 320 pages (split into two parts: A, B). |
| Ford Motor Company, 2003 Ford Expedition User Owner's Guide (Printing 5), 2003, 344 pages (split into two parts: A, B). |
| Ford Motor Company, 2003 Ford Expedition Wiring Diagrams, 2003, 585 pages (split into four parts: A, B, C, D). |
| Ford Motor Company, 2003 Ford Expedition Workshop Manual V1, 2003, 1632 pages (split into nine parts: A, B, C, D, E, F, G, H, I). |
| Ford Motor Company, 2003 Ford Expedition Workshop Manual V2, 2003, 1818 pages (split into thirteen parts: A, B, C, D, E, F, G, H, I, J, K, L, M). |
| Ford Motor Company, Expedition Quick Reference Guide CD-ROM, 2003, 7 pages. |
| Ford Motor Company, Ford 4 Wheeling Supplement Owner's Guide Supplement, 1997, 23 pages. |
| Ford Motor Company, Ford F-350 Tonka, 2002, 29 pages. |
| Ford Motor Company, Ford Vehicle Tag—Using Your 4×4 System, 2003, 344 pages (split into two parts: A, B). |
| Ford Motor Company, Using Your 4×4 System Tag, 2 pages. |
| Ford, 2003 Expedition Owners Guide (2nd Printing), 2003, 346 pages (split into two parts: A, B). |
| Ford, 2003 Expedition Quick Reference Guide, 2003, 12 pages. |
| Fred L. Goodell, SAE International, Central Tire Inflation: "A Giant Step Towards Soft Soil Mobility", Nov. 1988, 12 pages. |
| G. Forkenbrock et al., "A Comprehensive Light Vehicle Antilock Brake System Test Track Performance Evaluation", SAE The Engineering Society for Advancing Mobility Land Sea Air and Space, Mar. 1999, 13 pages. |
| General Motors Corporation, 2002 GMC Terra4, 2002, 8 pages. |
| General Motors Corporation, GMC Terradyne, 35 pages. |
| General Motors Corporation, Hummer H2 Concept Vehicle—Dealership Materials, 2000, 41 pages. |
| General Motors, GM Corporate Information CD-ROM , 2003, 3 pages. |
| General Motors, GM Powertrain Information CD-ROM, 2003, 3 pages. |
| Global Mobility Database, All-Wheel and Four-Wheel-Drive Vehicle Systems, Nov. 1995, 75 pages. |
| GM Press Release, 2003 Hummer H2—New Sheriff in Town, 2003, 3 pages. |
| GM Press Release, General Motors' Hummer H2 Vision Vehicle: a New Chapter in the Hummer Legend, 2000, 3 pages, available at https://web.archive.org/web/20010212094351/https://media.gm.com/news/releases/g000109a.html, accessed on Feb. 12, 2021. |
| GM Press Release, GM Announces Strong June Sales, Jul. 2, 2002, 8 pages. |
| GM Press Release, GM Debuts Hummer at LA Auto Show, 2003, 2 pages. |
| GM Press Release, Hummer Announces 2003 H2 Pricing, 2003, 2 pages. |
| GM Press Release, Hummer Begins A "Brand" New Era With H2, Dec. 11, 2001, 4 pages. |
| GM Press Release, Hummer H2 Brings Bold Styling, Superior Off-Road Performance to Production, Jan. 6, 2001, 1 page. |
| GM Press Release, Hummer Takes Manhattan, Nov. 9, 2001, 2 pages. |
| GM Press Release, Hummer's First Television Campaign Showcases The H2's Off-Road Capability And Prestige, 2002, 2 pages. |
| GM Press Release, Society Of Automotive Analysts Lunch, Jan. 8, 2002, 4 pages. |
| GM Press Release, Take A Virtual Tour Of The 2002 North American International Auto Show, Courtesy Of General Motors, 2002, 2 pages. |
| GM Press Release, The Legend Of Hummer Continues, 2001, 2 pages. |
| GM Webpage, General Motors' Hummer H2 Vision Vehicle: A New Chapter in the Hummer Legend, 2002, 4 pages. |
| GM Webpage, GM Experience Live, 2002, 1 page. |
| GM Webpage, Hummer H2 Concept SUV, 2001, 2 pages. |
| GM Webpage, Hummer H2 Vision Vehicle Specifications, 2001, 2 pages. |
| Gregory, Davis, "Responsive Expert Report on Validity of Dr. Gregory Davis (Sep. 10, 2020)", redacted, The United States District Court For The Eastern District Of Virginia Norfolk Division, Case No. 2:18cv320, Sep. 10, 2020, 352 pages. |
| H.M. Streib et al., "Electronic Throttle Control (ETC): A Cost Effective System for Improved Emissions, Fuel Economy, and Driveability", SAE The Engineering Society for Advancing Mobility Land Sea Air and Space, Feb. 1996, 6 pages. |
| H2 Chassis, "Tuned to Optimal Blend of On-Road Comfort and Off-Road Prowess" (H2 Hummer Press Kit A), Dec. 2001, 6 pages. |
| H2 Exterior Design, "Building on a Legend" (H2 Hummer Press Kit B), Dec. 2001, 4 pages. |
| H2 Interior, "Refinement and Civility Find a Happy Home Among Rugged Surroundings" (H2 Hummer Press Kit C), Dec. 2001, 4 pages. |
| H2's Premium Powertrain, "Anchored by Vortec Power and Sophisticated Four-Wheel Drive" (H2 Hummer Press Kit E), Dec. 2001, 4 pages. |
| Hassan E. Awatif, An All Terrain Vehicle Equipped with CTIS, 1984, 18 pages. |
| Headquarters Department of The Army, Army AL and T May-Jun. 2001 Issue (Combatt), 2001, 64 pages. |
| Headquarters, Department of the Army and Air Force, Technical Manual Extended Service Program (ESP) Operator's Manual for 2½-Ton, 6×6, M44A3 Series Trucks (Diesel), Jan. 1996, 239 pages. |
| Headquarters, Department of the Army, Training Program for the Palletized Load System, 1994, 283 pages. |
| Heart-Beat Motors Mitsubishi Motors; Lancer Evolution VII; Press Information Jan. 2001, 32 pages. |
| Hummer H2 Media Page, https://media.gm.com/hummer/, Dec. 1, 2001, 1 page. |
| Hummer H2 Owner's Manual, General Motors of Canada Limited, 2003, 440 pages. |
| Hummer H2, "Preliminary Specifications" (H2 Hummer Press Kit G), Dec. 2001, 4 pages. |
| Hummer, "Begins a ‘Brand’ New Era with H2" (H2 Hummer Press Kit D), Dec. 2001, 6 pages. |
| Hummer, Hmmer Product Information CD-ROM , 2003, 11 pages. |
| Hummer, Hummer Brochure, 2000, 31 pages. |
| Hummer, Hummer, 2001, 16 pages. |
| IEEE/ASME Transactions on Mechatronics, The Role of Electronic Controls for Future Automotive Mechatronic Systems, Mar. 1996, 9 pages. |
| Information Disclosure Statement, dated Oct. 15, 2018, 2 pages. |
| Information Disclosure Statement, dated Sep. 19, 2016, 3 pages. |
| Internet Archive, 2003 Hummer H2 Chassis, 2003, 5 pages. |
| Internet Archive, 2003 Hummer H2 Chassis—Internet Archive, 2003, 5 pages. |
| Internet Archive, 2003 Hummer H2 Dealership Brochure, 2003, 44 pages. |
| Internet Archive, 2003 Hummer H2 Exterior Design—Archive, 2003, 4 pages. |
| Internet Archive, 2003 Hummer H2 Exterior, 2003, 4 pages. |
| Internet Archive, 2003 Hummer H2 H2 Powertrain, 2003, 4 pages. |
| Internet Archive, 2003 Hummer H2 Information Brochure, 2003, 108 pages. |
| Internet Archive, 2003 Hummer H2 Interior, 2003, 3 pages. |
| Internet Archive, 2003 Hummer H2 Interior—Internet Archive, 2003, 4 pages. |
| Internet Archive, 2003 Hummer H2 Overview, 2003, 5 pages. |
| Internet Archive, 2003 Hummer H2 Owner's Manual, 2003, 440 pages (split into two parts: A, B). |
| Internet Archive, 2003 Hummer H2 Powertrain—Internet Archive, 2003, 4 pages. |
| Internet Archive, 2003 Hummer H2 Preliminary Specs, 2003, 4 pages. |
| Internet Archive, 2003 Hummer H2 Preliminary Specs—Internet Archive, 2003, 2 pages. |
| Internet Archive, 2003 Hummer H2 Press Kit Exterior, 2003, 5 pages. |
| Internet Archive, 2003 Hummer H2 Press Kit, 2003, 86 pages. |
| Internet Archive, 2003 Hummer H2 Product Features—Internet Archive, 2003, 3 pages. |
| Internet Archive, 2003 Hummer H2 Safety and Security, 2003, 5 pages. |
| Internet Archive, 2003 Hummer H2 Safety and Security—Internet Archive, 2003, 5 pages. |
| Internet Archive, 2003 Hummer H2 Service Manual V1, 2003, 1921 pages (split into fourteen parts: A, B, C, D, E, F, G, H, I, J, K, L, M, N). |
| Internet Archive, 2003 Hummer H2 Service Manual V2, 2003, 1865 pages (split into thirteen parts: A, B, C, D, E, F, G, H, I, J, K, L, M). |
| Internet Archive, 2003 Hummer H2 SUV—Internet Archive, 2003, 2 pages. |
| Internet Archive, 2003 Hummer H2 Unit Repair Manual V1, 2003, 1605 pages (split into twelve parts: A, B, C, D, E, F, G, H, I, J, K, L). |
| Internet Archive, 2003 Hummer H2 Unit Repair Manual V2, 2003, 1371 pages (split into eight parts: A, B, C, D, E, F, G, H). |
| Internet Archive, 2003 Hummer H2—H2 Tailored to Expand Hummer Audience—Internet Archive, 2003, 2 pages. |
| Internet Archive, 2003 Hummer H2—Hummer Begins Brand New Era—Internet Archive, 2003, 2 pages. |
| J. Gerstenmeier, "Traction Control (ASR)—An Extension of the Anti-Lock Braking System (ABS)", Robert Bosch GmbH, date unknown, 6 pages. |
| J. Lamm & M. DeLorenzo, "Hummer H2," Motorbooks International, 2002, 61 pages. |
| Jack Jackson, The Off-Road 4-Wheel Drive Book 4th Edition.pdf, 1999, 202 pages (split into three parts: A, B, C). |
| Jack Keebler, 1998 Lincoln Navigator—First Test, 1997, 6 pages, available at https://www.motortrend.com/cars/lincoln/navigator/1998/1998-lincoln-navigator/, accessed on Feb. 25, 2021. |
| Jaguar Land Rover Limited, "Memorandum in Support of Jaguar Land Rover Limited's Motion to Strike", redacted, The United States District Court For The Eastern District Of Virginia Norfolk Division, Case No. 2:18-cv-320, Aug. 5, 2020, 16 pages. |
| Jaguar Land Rover Limited, "Reply in Support of Jaguar Land Rover Limited's Motion to Strike", The United States District Court For The Eastern District Of Virginia Norfolk Division, Case No. 2:18-cv-320, Aug. 19, 2020, 12 pages. |
| James A. Beverly, SAE International, Future Development of Central Tire Inflation Systems and Integration with Vehicles, Nov. 1994, 6 pages. |
| James M. Flammang, Preview Drive: 1997 Ford Expedition, 1997, 3 pages, available at https://web.archive.org/web/19961221092244/https://www.edmunds.com/edweb/tirekick/expedit.html, accessed on Feb. 12, 2021. |
| Jeffrey W. Hodgson et al., Design of a low production cost hybrid HMMWV, Jun. 2005, 8 pages. |
| John C. Dixon, Tires, Suspension and Handling, 1996, 642 pages (split into five parts: A, B, C, D, E). |
| K. Hosomi et al., "Development of Active-Traction Control System", SAE The Engineering Society for Advancing Mobility Land Sea Air and Space, May 2000, 8 pages. |
| Karl Brauer, Why Drive-by-Wire?, Jan. 2000, 2 pages. |
| Lancer Evolution VII Close-Up, Best Car Magazine Special Edition, 9 pages. |
| Lancer Evolution-VII Press Information Geneva MotorShow, Mitsubishi Motors Corp., Feb./Mar. 2001, 29 pages. |
| Leonard, Lawrence R., US Magistrate Judge of The United States District Court For The Eastern District Of Virginia Norfolk Division, "Order", The United States District Court For The Eastern District Of Virginia Norfolk Division, Case No. 2:18-cv-320, Aug. 27, 2020, 8 pages. |
| Levolant, Lancer Evolution vol. 2 Article, 2002, 15 pages. |
| Lexus User Manual, undated, pp. 222-260. |
| Lexus, 2002 Lexus LS430 Owner's Manual, 2002, 424 pages (split into two parts: A, B). |
| Lexus, 2003 Lexus GX470 Owner's Manual, 2003, 483 pages (split into two parts: A, B). |
| Lincoln, 1998 Lincoln Navigator Owner's Manual, 1998, 186 pages (split into two parts: A, B). |
| Lincoln, 1998 Lincoln Navigator Workshop Manual V1, 1998, 1750 pages (split into five parts: A, B, C, D, E). |
| Lincoln, 1998 Lincoln Navigator Workshop Manual V2, 1998, 1873 pages (split into six parts: A, B, C, D, E, F). |
| Lincoln, 1998 Navigator Electrical Manual, 1998, 331 pages (split into two parts: A, B). |
| Lincoln, 2001 Navigator Electrical Manual, 2001, 499 pages (split into three parts: A, B, C). |
| Lincoln, 2001 Navigator Owners Manual, 2001, 256 pages (split into two parts: A, B). |
| Lincoln, 2001 Navigator Workshop Manual vol. 1 of 2, 2001, 2392 pages (split into sixteen parts: A, B, C, D, E, F, G, H, I, J, K, L, M, N, O, P). |
| Lincoln, 2001 Navigator Workshop Manual vol. 2 of 2, 2001, 2649 pages (split into fifty one parts: AA, AB, AC, AD, AE, AF, AG, AH, AI, AJ, AK, AL, AM, AN, AO, AP, AQ, AR, AS, AT, AU, AV, AW, AX, AY, AZ, BA, BB, BC, BD, BE, BF, BG, BH, BI, BJ, BK, BL, BM, BN, BO, BP, BQ, BR, BS, BT, BU, BV, BW, BX, BY). |
| Lincoln, 2002 Lincoln Navigator Owner's Manual, 2002, 272 pages (split into two parts: A, B). |
| Lincoln, 2003 Lincoln Navigator Owner's Manual, 2003, 352 pages (split into two parts: A, B). |
| Lincoln, 98 Navigator 4WD Supplement, 1998, 20 pages. |
| Lincoln, 98 Navigator Owner's Manual, 1998, 186 pages (split into two parts: A, B). |
| Lynch Hummer, 2002 Hummer H2 Concept, 2002, 4 pages. |
| Lynch Hummer, H2's Premium Powertrain, 2002, 6 pages. |
| Mary Iacoponi, 1997 Ford Expedition XLT—The newest 4×4 people-mover, 1997, 3 pages. |
| Masaaki Mizuguchi et al., Electronic-Controlled Suspension (ECS), Society of Automotive Engineers, 1984, 9 pages. |
| Mercedes-Benz C-Class Operator's Manual, Daimler Chrysler AG, 2001, 381 pages. |
| Mercedes-Benz, CL 500 Operator's Manual (short), dated "Press time Oct. 31, 2000", 8 pages. |
| Mercedes-Benz, G Class Component Locations, 14 pages. |
| Mercedes-Benz, G Class Differential Locks, 2003, 24 pages. |
| Mercedes-Benz, G Class Electrical Systems, 2003, 36 pages (split into two parts: A, B). |
| Mercedes-Benz, G Class Transfer Case, 2003, 25 pages. |
| Mercedes-Benz, G-Class Operator's Manual, 2002, 385 pages (split into two parts: A, B). |
| Mercedes-Benz, M Class Operator's Manual, 2002, 342 pages. |
| Mercedes-Benz, Mercedes M Class Operator's Manual, 2001, 317 pages. |
| Mike Weinberg, Understanding the Mitsubishi Montero Acive Trac 4wd, Nov. 1997, 7 pages. |
| Mike Weinberg, Understanding The Mitsubishi Montero Active Trac 4WD System, Transmission Digest, dated Nov. 1997, pp. 44-57. |
| Mitsubishi Motors, Geneva Motor Show, 2001, 29 pages. |
| Mitsubishi Motors, Lancer Evo 7 Technical Infomation Manual, Apr. 2001, 171 pages. |
| Mitsubishi Motors, Lancer Evolution VII Press Information, 2001, 32 pages. |
| Mitsubishi Motors, Mitsubishi Motors Press Information, 2001, 17 pages. |
| Motor Trend Group, LLC., 98 Lincoln Navigator—long-Term Wrap-up, Feb. 2, 2000, 9 pages. |
| New Lexus LS400 Improves on Excellence, dated Sep. 1998, 22 pages. |
| Nick Dimbleby, Off Road Driving Techniques, 1997, 162 pages (split into two parts: A, B). |
| Nissan Manual, Nissan Motor Co., Ltd. Tokyo, Japan, 2002, 288 pages. |
| Oshkosh Defense, Oshkosh Fields First MTVR in Ceremony at Blount Island , Aug. 8, 2001, 3 pages. |
| Oshkosh Defense, Oshkosh Truck Corporation, Oshkosh Truck Extends Line of U.S. Marine Corps Tactical Vehicles with New Tow Truck Model, Jun. 2001, 3 pages. |
| Oshkosh Defense, Oshkosh Truck Extends Line of U.S. Marine Corps Tactical Vehicles with New Tow Truck Model, Jun. 7, 2001, 3 pages. |
| Oshkosh PLS, Palletized Load System Specifications, 6 pages. |
| Oshkosh Truck Corporation, Advanced Technology Allows New Military Truck to Run as Fast as a Tank Off-Road, 2000, 1 page, available at https://web.archive.org/web/20000603104243/https://www.oshkoshtruck.com:80/pr/nr011900.html, received on. |
| Oshkosh Truck Corporation, Advanced Technology Allows New Military Truck to Run as Fast as a Tank Off-Road, 2000, 2 pages, available at https://web.archive.org/web/20000303065725/https://www.oshkoshtruck.com/pr/nr011900.html, received on. |
| Oshkosh Truck Corporation, Advanced Technology Allows New Military Truck to Run as Fast as a Tank Off-Road, Jun. 3, 2000, 1 page. |
| Oshkosh Truck Corporation, Advanced Technology Allows New Military Truck to Run as Fast as a Tank Off-Road, Mar. 3, 2000, 2 pages. |
| Oshkosh Truck Corporation, Medium Tactical Vehicle Replacement, 2000, 6 pages. |
| Oshkosh Truck Corporation, Oshkosh Truck Corporation News MTVR , Jun. 2000, 2 pages. |
| Oshkosh Truck Corporation, Oshkosh Truck Debuts New Medium Tactical Vehicle to the U.S. Armed Services, 2000, 1 page, available at https://web.archive.org/web/20000929033747/https://www.oshkoshtruck.com:80/pr/pr100199.html, received on. |
| Oshkosh Truck Corporation, Oshkosh Truck Debuts New Medium Tactical Vehicle to the U.S. Armed Services, May 26, 2000, 1 page. |
| Oshkosh Truck Corporation, PLS Vehicle, 2000, 2 pages, available at https://web.archive.org/web/20000618041510/https://www.oshkoshtruck.com/pls.html, received on. |
| Oshkosh Truck Corporation, PLS Vehicle, 2000, 2 pages. |
| Oshkosh Truck Corporation, Severe-duty trucks for defense, airport, municipal and concrete industries (Mentions the new MTVR), Jun. 2000, 2 pages. |
| P. G. Wright et al., The Case for an Irreversible Active Suspension System, SAE International, 1989, 8 pages. |
| Paul W. Claar II, SAE International, A Review of Active Suspension Control for On and Off-Highway Vehicles, Nov. 1989, 15 pages. |
| Philip Reed, Hummer's New H2: The Testosterone Package, 2002, 3 pages. |
| Porsche 959 Driver's Manual, 1987, 116 pages. |
| Porsche 959 Technical Details,in German, undated, 3 pages. |
| Porsche 959 User Manual, Jun. 1987, 5 pages. |
| Porsche 959 Workshop Manual, Supplement 2, Dr. Ing. h. c. F. Porsche Aktiengesellschaft, printed in Germany, Dec. 1989, 36 pages. |
| Porsche 959, Dr. Ing. h. c. F. Porsche Aktiengesellschaft, printed in Germany, 13 pages. |
| Porsche, Porsche 959 Driver's Manual, 1987, 116 pages. |
| Porsche, Porsche 959 Workshop Manual, Nov. 1988, 588 pages (split into three parts: A, B, C). |
| Porsche, Porsche ATZ Article Part 1 , May 1986, 21 pages. |
| Porsche, Porsche ATZ Article Part 2, Jun. 1986, 16 pages. |
| Porsche, Porsche ATZ Article Part 3, Jul. 1986, 22 pages. |
| Porsche, Porsche ATZ Article Part 4, Sep. 1986, 18 pages. |
| R. Colletti, "Defendants' Preliminary Invalidity Contentions", Attorneys for Defendants, Bentley Motors Limited and Bentley Motors, Inc., dated Nov. 5, 2019, 70 pages. |
| Roadranger Electronic Support Network, Roadranger Electronic Support Network , Oct. 1999, 2 pages. |
| Roadranger Electronic Support Network, Roadranger Electronic Support Network, 1999, 2 pages, available at https://web.archive.org/web/19991006064457/https://truck.eaton.com/na/index htm. |
| Roadranger Electronic Support Network, Tire Management System , Sep. 2000, 1 page. |
| Roadranger Electronic Support Network, Tire Management System September, Sep. 2000, 1 page. |
| Roadranger Electronic Support Network, Tire Management System, Apr. 2001, 1 page. |
| Robert W. Kaczmarek, CTIS Article , Aug. 1984, 18 pages. |
| Roger D Fruechte et al., General Motors Research Labs, Integrated Vehicle Control, 1988, 10 pages. |
| SAE International, Advanced Hybrid Electric Drive Technology Demonstrator, 2001, 8 pages. |
| SAE International, Automotive Engineering International, 2002, 134 pages (split into two parts: A, B). |
| SAE International, Automotive Engineering International, Aug. 2000, 170 pages (split into two parts: A, B). |
| SAE International, Automotive Engineering International, Dec. 2000, 86 pages. |
| SAE International, Automotive Engineering International, Feb. 2000, 272 pages. |
| SAE International, Automotive Engineering International, Feb. 2002, 224 pages (split into three parts: A, B, C). |
| SAE International, Automotive Engineering International, Jan. 2000, 172 pages (split into three parts: A, B, C). |
| SAE International, Automotive Engineering International, Jan. 2000, 172 pages (split into two parts: A, B). |
| SAE International, Automotive Engineering International, Jan. 2001, 142 pages (split into two parts: A, B). |
| SAE International, Automotive Engineering International, Jan. 2002, 106 pages. |
| SAE International, Automotive Engineering International, Jul. 2000, 234 pages (split into two parts: A, B). |
| SAE International, Automotive Engineering International, Mar. 2000, 206 pages (split into two parts: A, B). |
| SAE International, Automotive Engineering International, Mar. 2001, 164 pages (split into two parts: A, B). |
| SAE International, Automotive Engineering International, Mar. 2002, 106 pages. |
| SAE International, Automotive Engineering International, May 2002, 223 pages (split into two parts: A, B). |
| SAE International, Automotive Engineering International, Nov. 2000, 174 pages (split into two parts: A, B). |
| SAE International, Automotive Engineering International, Oct. 2000, 204 pages (split into two parts: A, B). |
| SAE International, Automotive Engineering International, Sep. 2001, 136 pages (split into two parts: A, B). |
| SAE International, Central Tire Inflation Systems (CTIS) Technology, Development, and Application, Nov. 1994, 13 pages. |
| SAE International, Central Tire Inflation Systems: The Basics of How the Systems Function and Installation/Operational Issues, Nov. 1994, 11 pages. |
| SAE International, Commercial Vehicle Suspensions, Steering Systems, and Traction, Nov. 1991, 2 pages. |
| SAE International, Design of an Advanced Heavy Tactical Trucks: A Target Cascading Case Study , Jan. 2001, 14 pages. |
| SAE International, Development of an Integrated System of 4WS and 4WD by H Control, Mar. 1993, 10 pages. |
| SAE International, Electromechanical Suspension Performance Testing, 2001, 14 pages. |
| SAE International, Future Heavy Tactical Truck, Mar. 2001, 7 pages. |
| SAE International, Hybrid Propulsion Truck Platform Dually Developed by the U.S. Army and DaimlerChrysler, 2001, 9 pages. |
| SAE International, Improved Army Vehicle Brakes/Safety Through Partnering, Jan. 1999, 7 pages. |
| SAE International, Semiactive Suspension: A Field Test Case Study, Feb. 1998, 10 pages. |
| SAE International, Semiactive Suspension: A Mobility Case Study, Feb. 1997, 9 pages. |
| SAE International, Telematics for "SmarTruck", Nov. 2001, 8 pages. |
| Safety and Security, "Top of Mind in Hummer H2 Development, Engineering and Design" (H2 Hummer Press Kit F), Dec. 2001, 6 pages. |
| Technical Information Manual for Lancer Evolution-VII, Mitsubishi Motors Corp., Apr. 2001, 171 pages. |
| The University of Michigan, Automotive Electronics Delphi, Aug. 1989, 142 pages. |
| The Washington Post, Auto Maker Seeks Breakthrough , Jun. 1, 1985, 4 pages. |
| Thomas Merker, Active Body Control (ABC) The DaimlerChrysler Active Suspension and Damping System, 2002, 7 pages. |
| Toyota, 2002 Toyota 4Runner Owner's Manual, 2002, 308 pages. |
| Turbo, Lancer 4WD Turbo Article, 2002, 15 pages. |
| U.S. Department of Transportation, NHTSA Light Vehicle Antilock Brake System Research Program Task 4: A Test Track Study of Light Vehicle ABS Performance Over a Broad Range of Surfaces and Maneuvers, Jan. 1999, 67 pages. |
| United States Patent and Trademark Office, Declaration of Karl-Hubert Schlichtenmayer, Aug. 14, 2019, 2 pages. |
| USPTO, Canepa Declaration, Aug. 2019, 4 pages. |
| Volkswagen, Hybrid Power An Enabling Technology For Future Combat Systems, Mar. 28, 2017, 1 page. |
| Volkswagen, VW Magellan, 2002, 25 pages. |
| W. Huber et al., "New Approaches to Electronic Throttle Control", SAE The Engineering Society for Advancing Mobility Land Sea Air and Space, Feb./Mar. 1991, 11 pages. |
| Ziaad Khan, British Library Declaration, Aug. 2019, 15 pages. |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220340136A1 (en) * | 2021-04-26 | 2022-10-27 | Mazda Motor Corporation | Travel mode switching device for vehicle and display unit of the same |
| US11767017B2 (en) * | 2021-04-26 | 2023-09-26 | Mazda Motor Corporation | Travel mode switching device for vehicle and display unit of the same |
| US20230382409A1 (en) * | 2022-05-27 | 2023-11-30 | Hyundai Motor Company | System for enabling a vehicle to perform a circuit mode |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1355209A1 (en) | 2003-10-22 |
| US7349776B2 (en) | 2008-03-25 |
| US20030200016A1 (en) | 2003-10-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| USRE49258E1 (en) | Vehicle control | |
| USRE46828E1 (en) | Vehicle control | |
| US7162346B2 (en) | Vehicle control method and apparatus | |
| JP6159804B2 (en) | Vehicle control system and method | |
| US9919738B2 (en) | Vehicle control system and method | |
| EP2106353B1 (en) | Vehicle systems control for improving stability | |
| CN102470863B (en) | Vehicle control device | |
| US20180257649A1 (en) | Vehicle Speed Control System | |
| US8655565B2 (en) | Three-wheel vehicle electronic stability system and control strategy therefor | |
| US10583834B2 (en) | Vehicle speed control system and method | |
| JP6377162B2 (en) | Vehicle control system and method | |
| US20160185350A1 (en) | Vehicle speed control system and method | |
| EP1059186B1 (en) | Vehicle-behavior control apparatus and method | |
| GB2412099A (en) | Controlling brake-steer when a vehicle is moving in a reverse direction | |
| US20170001645A1 (en) | Vehicle speed control system and method | |
| WO2011075014A1 (en) | Anti-slip support system and method for improving traction of a truck | |
| WO2018134153A1 (en) | Control system for a vehicle and method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| FEPP | Fee payment procedure |
Free format text: ENTITY STATUS SET TO UNDISCOUNTED (ORIGINAL EVENT CODE: BIG.); ENTITY STATUS OF PATENT OWNER: LARGE ENTITY |
|
| AS | Assignment |
Owner name: JAGUAR LAND ROVER LIMITED, UNITED KINGDOM Free format text: ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNOR:LAND ROVER;REEL/FRAME:052758/0031 Effective date: 20121217 |