KR20180089625A - 라이다 스캐닝 장치 - Google Patents
라이다 스캐닝 장치 Download PDFInfo
- Publication number
- KR20180089625A KR20180089625A KR1020170014209A KR20170014209A KR20180089625A KR 20180089625 A KR20180089625 A KR 20180089625A KR 1020170014209 A KR1020170014209 A KR 1020170014209A KR 20170014209 A KR20170014209 A KR 20170014209A KR 20180089625 A KR20180089625 A KR 20180089625A
- Authority
- KR
- South Korea
- Prior art keywords
- mirror
- laser beam
- transmission
- receiving
- reception
- Prior art date
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4816—Constructional features, e.g. arrangements of optical elements of receivers alone
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4814—Constructional features, e.g. arrangements of optical elements of transmitters alone
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4817—Constructional features, e.g. arrangements of optical elements relating to scanning
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/18—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors
- G02B7/182—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors for mirrors
- G02B7/1821—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors for mirrors for rotating or oscillating mirrors
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Optics & Photonics (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
본 발명은 레이저 빔를 대상체에 조사하여 대상체에 의해 반사되어 돌아오는 레이저 빔을 분석해서 대상체까지의 거리, 방향, 속도 등을 측정하는 라이다 스캐닝 장치에 관한 것으로,
본 발명의 실시예에 따른 라이다 스캐닝 장치는,
레이저 빔을 조사하는 송신부; 상기 송신부로부터 조사되는 레이저 빔을 반사시키는 반사 미러; 상기 반사 미러로부터 반사된 레이저 빔을 전방위로 방사시키며, 다각뿔 형상으로 형성되며 각 면의 기울기가 상이한 송신 미러; 상기 송신 미러에서 방사된 후, 대상체에서 반사된 레이저 빔을 수신하며, 각 면의 곡률이 상이한 다면으로 형성된 수신 미러; 상기 수신 미러에서 반사된 레이저 빔을 수신하는 수신부; 상기 송신 미러와 수신 미러를 회전시키는 회전 모터;를 포함한다.
본 발명의 실시예에 따른 라이다 스캐닝 장치는,
레이저 빔을 조사하는 송신부; 상기 송신부로부터 조사되는 레이저 빔을 반사시키는 반사 미러; 상기 반사 미러로부터 반사된 레이저 빔을 전방위로 방사시키며, 다각뿔 형상으로 형성되며 각 면의 기울기가 상이한 송신 미러; 상기 송신 미러에서 방사된 후, 대상체에서 반사된 레이저 빔을 수신하며, 각 면의 곡률이 상이한 다면으로 형성된 수신 미러; 상기 수신 미러에서 반사된 레이저 빔을 수신하는 수신부; 상기 송신 미러와 수신 미러를 회전시키는 회전 모터;를 포함한다.
Description
본 발명은 레이저 빔를 대상체에 조사하여 대상체에 의해 반사되어 돌아오는 레이저 빔을 분석해서 대상체까지의 거리, 방향, 속도 등을 측정하는 라이다 스캐닝 장치에 관한 것이다.
일반적으로, 라이다 시스템(LIDAR system; Light Detection And Ranging system)은 레이저를 대상체에 조사하고, 대상체에 의해 반사되어 돌아오는 레이저 빔을 분석해서 대상체까지의 거리, 방향, 속도 등을 측정 감지할 수 있는 시스템이다.
이러한 라이다 시스템은 기상 관측이나, 거리 측정 등의 용도를 위해 활용되다가, 최근에는 자율 주행 차량, 위성을 이용한 기상 관측, 무인 로봇 센서 및 3차원 영상 모델링을 위한 기술 등에 사용되고 있다.
레이저 빔은 측정방법에 따라 사인파, 펄스파 등으로 조사될 수 있고, 2D 맵핑이나 3D 형상 측정시 레이저 빔의 측정점을 옮기기 위해서는 모터나 미러 등으로 구성된 라이다 스캐닝 장치가 필요하다.
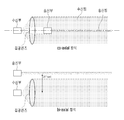
라이다 스캐닝 장치는 송신빔과 수신빔 간의 배열 방식에 따라 co-axial 방식, bi-axial 방식 등이 있다.
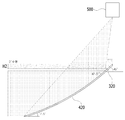
도 1은 송신빔과 수신빔간 배열 방식에 따른 라이다 스캐닝 장치가 도시된 도면이다.
도 1에 도시된 바와 같이, co-axial 방식의 라이다 스캐닝 장치는 송신빔과 수신빔의 축이 일치하도록 배열되고, bi-axial 방식의 라이다 스캐닝 장치는 송신빔과 수신빔의 축이 일치하지 않고 평행하도록 배열된다.
co-axial 방식은 송신부의 일부가 수광빔을 가리는 구조이나, bi-axial은 가리지 않는 구조이다. 측정 거리면에서 bi-axial이 유리하나, bi-axial 방식은 근거리 측정일수록 집광 위치가 변해서 측정이 안될 수 있는 단점이 있다.
도 3 내지 도 5는 종래 기술에 따른 라이다 스캐닝 장치가 도시된 도면이다.
도 3은 SICK사의 대표적인 스캐닝 방식을 도시하고 있다. 도 3의 스캐닝 방식은 단일 송신부와 단일 수신부로 이루어지며, 송신빔과 수신빔간 배열은 co-axial 방식이다. 하나의 단면 미러 사용하며, 미러의 회전축이 송신부 및 수신부 축과 일치하는 것이 특징이다.
도 3의 스캐닝 방식은 송신부가 집광렌즈로 들어오는 수신빔의 일부를 가리므로 수광 측면에서 손실이 발생하고, 이에 따라 최대 측정 거리가 짧아지게 되는 문제점이 있다.
도 4는 Hokuyo 사의 대표적인 스캐닝 방식이다. 도 4의 스캐닝 방식은 단일 송신부와 단일 수신부로 이루어지며, 송신빔과 수신빔간 배열은 bi-axial 방식이다. dual shaft 모터를 사용하여 두 개의 미러를 동시에 회전시키며, 미러의 회전축은 송신부 및 수신부 축과 일치하는 것이 특징이다.
도 4의 스캐닝 방식은 특수모터를 사용해야 하고, 단면 미러를 사용하므로 고속 스캐닝에 불리하며 3D 측정이 어렵다는 문제점이 있다.
본 발명은 상기한 종래의 스캐닝 방식의 문제점을 해결할 수 있는 라이다 스캐닝 장치를 제공하는 것을 목적으로 한다.
본 발명의 실시예에 따른 라이다 스캐닝 장치는,
레이저 빔을 조사하는 송신부; 상기 송신부로부터 조사되는 레이저 빔을 반사시키는 반사 미러; 상기 반사 미러로부터 반사된 레이저 빔을 전방위로 방사시키며, 다각뿔 형상으로 형성되며 각 면의 기울기가 상이한 송신 미러; 상기 송신 미러에서 방사된 후, 대상체에서 반사된 레이저 빔을 수신하며, 각 면의 곡률이 상이한 다면으로 형성된 수신 미러; 상기 수신 미러에서 반사된 레이저 빔을 수신하는 수신부; 상기 송신 미러와 수신 미러를 회전시키는 회전 모터;를 포함한다.
본 발명의 일 양상에 의하면, 상기 수신 미러의 각 면은, 상기 송신 미러의 각 면이 하방향으로 연장되어 형성된 것을 특징으로 한다.
본 발명의 일 양상에 의하면, 상기 수신부는 상기 반사 미러 상부에 이격되어 형성된 것을 특징으로 한다.
본 발명의 일 양상에 의하면, 상기 송신부와 상기 수신부는 상기 송신 미러의 위치를 기준으로 상측의 동일한 공간에 형성된 것을 특징으로 한다.
본 발명의 일 양상에 의하면, 상기 송신 미러와 이격되어 형성되며, 일 방향이 개방된 링 형상으로 형성된 빔 차단부를 포함하는 것을 특징으로 한다.
기타 본 발명의 다양한 측면에 따른 구현예들의 구체적인 사항은 이하의 상세한 설명에 포함되어 있다.
본 발명의 실시 형태에 따른 라이다 스캐닝 장치는,
bi-axial 방식으로 구성되어, 송신부가 수신빔의 일부를 가리지 않으므로 수광 측면에서 손실이 발생하지 않는 효과가 있다.
또한, dual shaft 모터와 같은 특수모터를 사용하지 않고, 면마다 측정 고도가 다른 다면 미러로 구성되어, 고속 스캐닝 및 3D 측정이 가능한 효과가 있다.
또한, 반사 미러와 수신부의 축은 회전 모터의 회전축을 연장한 가상의 회전축과 일치하도록 형성함으로써, 모든 방위각에 대하여 대상체에서 반사된 레이저 빔(수신빔)은 수신부에 집광될 수 있게 되고, 이에 따라, 수신부가 단일채널로 구성된 경우에도 3D 측정이 가능해지는 효과가 있다.
도 1은 송신빔과 수신빔간 배열 방식에 따른 라이다 스캐닝 장치가 도시된 도면이다.
도 2는 SICK사의 대표적인 라이다 스캐닝 장치가 도시된 단면도이고, 도 3은 도 2의 사시도이다.
도 4는 Hokuyo사의 대표적인 라이다 스캐닝 장치가 도시된 단면도이고, 도 5은 도 4의 사시도이다.
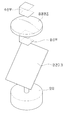
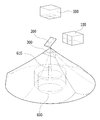
도 6은 본 발명의 일 실시예에 따른 라이다 스캐닝 장치가 도시된 사시도이다.
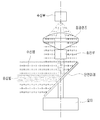
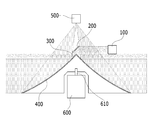
도 7은 본 발명의 일 실시예에 따른 라이다 스캐닝 장치가 도시된 단면도이다.
도 8은 송신 미러 및 수신 미러가 도시된 평면도이다.
도 9는 송신 미러에서 방사된 레이저 빔 방향이 예시된 평면도이다.
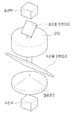
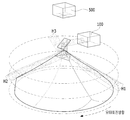
도 10은 송신 미러 및 수신 미러가 도시된 사시도이다.
도 11은 송신 미러에서 방사된 레이저 빔 방향이 예시된 사시도이다.
도 12 내지 도 14는 송신 미러에서 방사된 레이저 빔이 다른 측정고도로 방사되는 것을 예시하는 도면이다.
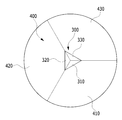
도 15는 수신 미러 주변에 형성된 빔 차단부가 도시된 평면도이다.
도 16은 수신 미러 주변에 형성된 빔 차단부가 도시된 측면도이다.
도 17은 빔 차단부가 형성된 라이다 스캐닝 장치의 동작 상태가 도시된 도면이다.
도 18은 송신 미러 및 수신 미러가 하나의 면으로 구성된 경우의 라이다 스캐닝 장치가 도시된 단면도이다.
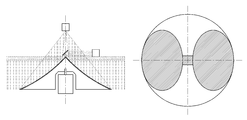
도 19는 송신 미러 및 수신 미러가 2개의 면으로 구성된 경우의 라이다 스캐닝 장치가 도시된 단면도이다.
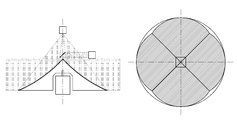
도 20은 송신 미러 및 수신 미러가 4개의 면으로 구성된 경우의 라이다 스캐닝 장치가 도시된 단면도이다.
도 2는 SICK사의 대표적인 라이다 스캐닝 장치가 도시된 단면도이고, 도 3은 도 2의 사시도이다.
도 4는 Hokuyo사의 대표적인 라이다 스캐닝 장치가 도시된 단면도이고, 도 5은 도 4의 사시도이다.
도 6은 본 발명의 일 실시예에 따른 라이다 스캐닝 장치가 도시된 사시도이다.
도 7은 본 발명의 일 실시예에 따른 라이다 스캐닝 장치가 도시된 단면도이다.
도 8은 송신 미러 및 수신 미러가 도시된 평면도이다.
도 9는 송신 미러에서 방사된 레이저 빔 방향이 예시된 평면도이다.
도 10은 송신 미러 및 수신 미러가 도시된 사시도이다.
도 11은 송신 미러에서 방사된 레이저 빔 방향이 예시된 사시도이다.
도 12 내지 도 14는 송신 미러에서 방사된 레이저 빔이 다른 측정고도로 방사되는 것을 예시하는 도면이다.
도 15는 수신 미러 주변에 형성된 빔 차단부가 도시된 평면도이다.
도 16은 수신 미러 주변에 형성된 빔 차단부가 도시된 측면도이다.
도 17은 빔 차단부가 형성된 라이다 스캐닝 장치의 동작 상태가 도시된 도면이다.
도 18은 송신 미러 및 수신 미러가 하나의 면으로 구성된 경우의 라이다 스캐닝 장치가 도시된 단면도이다.
도 19는 송신 미러 및 수신 미러가 2개의 면으로 구성된 경우의 라이다 스캐닝 장치가 도시된 단면도이다.
도 20은 송신 미러 및 수신 미러가 4개의 면으로 구성된 경우의 라이다 스캐닝 장치가 도시된 단면도이다.
본 발명은 다양한 변환을 가할 수 있고 여러 가지 실시예를 가질 수 있는 바, 특정 실시예를 예시하고 상세한 설명에 상세하게 설명하고자 한다. 그러나, 이는 본 발명을 특정한 실시 형태에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변환, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다.
본 발명에서 사용한 용어는 단지 특정한 실시예를 설명하기 위해 사용된 것으로, 본 발명을 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 발명에서, '포함하다' 또는 '가지다' 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다. 이하, 도면을 참조하여 본 발명의 실시예에 따른 라이다 스캐닝 장치를 설명한다.
도 6은 본 발명의 일 실시예에 따른 라이다 스캐닝 장치가 도시된 사시도이고, 도 7은 본 발명의 일 실시예에 따른 라이다 스캐닝 장치가 도시된 단면도이다.
도 6 및 도 7에 도시된 바와 같이, 본 발명의 일 실시예에 따른 라이다 스캐닝 장치는, 송신부(100), 반사 미러(200), 송신 미러(300), 수신 미러(400), 수신부(500), 회전 모터(600)를 포함한다.
송신부(100)는 반사 미러(200)와 수평 방향으로 일정 거리 이격되어 형성되며, 반사 미러(200)에 레이저 빔을 조사한다. 송신부(100)는, 예를 들어 레이저 다이오드(LD)가 사용될 수 있으며, 단일로 이루어질 수 있다.
반사 미러(200)는 레이저 빔을 조사하는 송신부(100)와 일정 거리 이격 형서되며, 송신부(100)로부터 조사되는 레이저 빔을 송신 미러(300) 방향으로 반사시킨다.
송신 미러(300)는 반사 미러(200) 하부에 일정 거리 이격 형성되며, 반사 미러(200)로부터 반사된 레이저 빔(송신빔)을 전방위로 방사시킨다.
도 8 및 도 9에 도시된 바와 같이, 송신 미러(300)는 다각뿔 형상으로 형성되며, 다각뿔의 옆면을 형성하는 각 면(310, 320, 330)은 각각 다른 기울기로 형성된다. 송신 미러(300)의 각 면(310, 320, 330)들이 각각 다른 기울기로 형성됨으로써, 반사 미러(200)로부터 입사하는 레이저 빔은 각각 다른 기울기의 면에서 반사되어 각각 다른 고도로 방사된다.
즉, 도 11에 도시된 바와 같이, 송신 미러(300)의 제1면(310)에서 반사된 레이저 빔은 제1면(310)의 기울기에 의해 제1 측정고도(H1)로 방사되고, 제2면(320)에서 반사된 레이저 빔은 제2면(320)의 기울기에 의해 제2 측정고도(H2)로 방사되고, 제3면(330)에서 반사된 레이저 빔은 제3면(330)의 기울기에 의해 제3 측정고도(H3)로 방사된다.
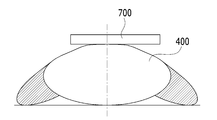
수신 미러(400)는 송신 미러(300)에서 방사된 후, 대상체에서 반사된 레이저 빔을 수신한다. 수신 미러(400)는 다각뿔대 형상으로 형성되며, 다각뿔대의 옆면을 형성하는 각 면(410, 420, 430)은 각각 다른 곡률을 가진 곡선 기울기로 형성된다.
수신 미러(400)의 각 면(410, 420, 430)은 송신 미러(300)를 이루는 다각뿔 형상의 각 면이 하방향으로 연장되어 형성된다. 따라서, 수신 미러(400)의 면 수는 송신 미러(300)의 면수와 동일한 면수로 이루어질 수 있으며, 제조시에 송신 미러(300)와 수신 미러(400)가 일체로 형성되어 다각뿔 형상으로 형성될 수 있다. 물론, 이에 한정되지 않고, 수신 미러(400)의 면 수는 송신 미러(300)의 면 수와 다르게 형성될 수도 있다.
도 10에 도시된 바와 같이,송신 미러(300) 부분의 각 면은 직선 기울기(G1)를 갖도록 형성되고, 수신 미러(400) 부분의 각 면은 각각 다른 곡률을 가진 곡선 기울기(G2)를 갖도록 형성되어, 각 면마다 측정고도가 다르므로 입체적인 3D 측정이 가능하다.
송신 미러(300)에서 방사된 레이저 빔이 다른 측정고도(H1, H2, H3)로 방사되는 것과 관련하여 도 12 내지 도 14를 참조하여 보다 상세히 설명한다.
도 12는 송신 미러(300)의 제1면(310)에서 반사된 레이저 빔의 방향이 도시되어 있다. 제1면(310)는 수평선을 기준으로 47.5도의 기울기로 형성되며, 제1면(310)에서 반사된 레이저 빔은 수평선을 기준으로 5도 하강하여 제1 측정고도(H1)로 방사된다. 이때, 수신 미러(400) 제1면(410)의 상측은 수평선을 기준으로 45도의 기울기로 형성될 수 있으며, 하측은 수평선을 기준으로 20도의 기울기로 형성될 수 있다. 상측과 하측 사이의 곡면은 기설정된 제1 곡률로 곡선 기울기를 이룬다.
도 13은 송신 미러(300)의 제2면(320)에서 반사된 레이저 빔의 방향이 도시되어 있다. 제2면(320)는 수평선을 기준으로 45도의 기울기로 형성되며, 제2면(320)에서 반사된 레이저 빔은 수평선과 나란한 방향인 제2 측정고도(H2)로 방사된다. 이때, 수신 미러(400) 제2면(420)의 상측은 수평선을 기준으로 42.5도의 기울기로 형성될 수 있으며, 하측은 수평선을 기준으로 17.5도의 기울기로 형성될 수 있다. 상측과 하측 사이의 곡면은 기설정된 제2 곡률로 곡선 기울기를 이룬다.
도 14는 송신 미러(300)의 제3면(330)에서 반사된 레이저 빔의 방향이 도시되어 있다. 제3면(330)는 수평선을 기준으로 42.5도의 기울기로 형성되며, 제3면(330)에서 반사된 레이저 빔은 수평선을 기준으로 5도 상승하여 제3 측정고도(H3)로 방사된다. 이때, 수신 미러(400) 제3면(430)의 상측은 수평선을 기준으로 42.5도의 기울기로 형성될 수 있으며, 하측은 수평선을 기준으로 15도의 기울기로 형성될 수 있다. 상측과 하측 사이의 곡면은 기설정된 제3 곡률로 곡선 기울기를 이룬다.
수신부(500)는 수신 미러(400)에서 반사된 레이저 빔을 수신하며, 레이저빔을 수광하는 이미지센서(미도시)를 포함할 수 있다. 수신부(500)는 반사 미러(200) 상부에 일정 거리 이격되어 형성된다. 송신부(100)와 수신부(500)는 송신 미러(300)와 수신 미러(400)의 위치를 기준으로 상측의 동일한 공간에 형성된다.
수신 미러(400)는 소정 곡률을 가진 곡면으로 형성되므로, 수신 미러(400)로 입사되는 레이저 빔은 곡면에 의해 반사되면서 동시에 집광되어 수신부(500)에 의해 수광된다. 따라서, 본 발명의 수신부(500)는 별도로 집광렌즈를 구비할 필요가 없어서, 구조가 간소화되고 제조 단가를 절감할 수 있게 된다.
한편, 수신부(500)는 수신 픽셀이 하나의 세트로 구성되어 단일 방향에서 입사되는 레이저 빔을 수신하는 단일채널 수신부 또는 수신 픽셀이 복수의 세트로 구성되어 복수의 방향에서 입사되는 레이저 빔을 구별하여 수신하는 다채널 수신부일 수 있다.
단일채널 수신부인 경우, 여러 방위각에서 동시에 입사하는 레이저 빔을 구별할 수 없는 반면, 그만큼 제조 비용을 절감할 수 있다.
다채널 수신부인 경우, 여러 방위각에서 동시에 입사하는 레이저 빔을 구별할 수 있지만, 그만큼 제조 비용을 상승하는 문제가 있다.
회전 모터(600)는 수신 미러(400) 내부 공간에 형성된다. 수신 미러(400), 송신 미러(300)는 회전 모터(600)의 회전축(610)에 의해 동축 회전하고, 송신 미러(300) 상부에 이격 형성된 반사 미러(200)와 수신부(500)의 축은 회전 모터(600)의 회전축(610)을 연장한 가상의 회전축과 일치하도록 형성된다.
이에 따라, 모든 방위각에 대하여 대상체에서 반사된 레이저 빔(수신빔)은 수신부(500)에 집광될 수 있다. 또한, 이에 따라, 수신부(500)가 단일채널로 구성된 경우에도 3D 측정이 가능해진다. 한편, 다채널 수신부를 사용하면 단일채널 수신부 사용시보다 신속하게 전방위(360도) 3D 측정이 가능하다.
한편, 수신부(500)가 단일채널로 구성된 경우, 여러 방위각에서 동시에 입사하는 레이저 빔을 구별할 수 없으므로, 정확한 측정을 하기 어렵게 된다.
이에 본 발명에서는, 도 15 및 도 16에 도시된 바와 같이, 수신부(500)가 단일채널로 구성된 경우라도 정확한 측정이 가능해지도록 한 방향의 레이저 빔을 제외한 나머지 레이저 빔의 경로를 차단하는 빔 차단부(700)를 더 포함할 수 있다.
빔 차단부(700)는 송신 미러(300) 주위에 송신 미러(300)와 이격되어 형성되며, 일 방향이 개방된 링 형상으로 형성된다. 도 15에서는 좌측이 개방된 원형링 형상의 빔 차단부(700)가 예시되어 있으나, 링 형상은 원형에 한정되지 않고, 타원 또는 각형 링일 수 있고, 개방된 방향도 우측 또는 상측 또는 하측 또는 대각 방향일 수 있다.
송신 미러(300) 주위에 빔 차단부(700)가 형성된 경우, 반사 미러(200)에서 반사된 레이저 빔은 송신 미러(300)에서 전방위로 방사되나, 빔 차단부(700)에 의해 어느 한 방향의 레이저 빔만 송신된다. 어느 한 방향으로 송신된 레이저 빔은 대상체에서 반사되어 수신 미러(400)를 통해 수신부(500)로 입사된다.
이때, 수신 미러(400)에 의해 수신부(500)로 입사되는 레이저 빔도 하나이므로, 단일채널 수신부라도 그 방향을 구별할 수 있으므로 정확한 측정이 가능하다. 또한, 송신 미러(300)가 회전 모터(600)에 의해 회전되므로, 일 방향으로만 송신되는 레이저 빔이라도 송신 미러(300)의 각 면(310, 320, 330)에 의해 방사되므로 다양한 측정고도로 방사될 수 있고, 수신 미러(400)의 각 면(410, 420, 430)에 의해 수신되므로, 3D 측정이 가능해진다.
상기의 설명에서 송신 미러(300) 및 수신 미러(400)의 면 수는 3개인 경우를 예로 설명하였으나, 송신 미러(300) 및 수신 미러(400)의 면 수는 이에 한정되지 않고 다양하게 설정될 수 있다.
예를 들어, 도 18에 도시된 바와 같이, 송신 미러(300) 및 수신 미러(400)가 하나의 면으로 구성될 수 있다. 이 경우, 회전 모터(600)의 회전에 의해 송신 미러(300) 및 수신 미러(400)가 있는 쪽이 편심되어 회전축(610)의 내구성에 악영향을 줄 수 있으므로, 송신 미러(300) 및 수신 미러(400)가 있는 쪽의 반대편에 무게 보상부(800)를 형성하여 회전축(610)이 편심되지 않도록 하는 것이 바람직하다.
도 18의 경우, 송신 미러(300) 및 수신 미러(400)의 면 수가 하나이므로, 다양한 측정고도를 측정할 수는 없으나, 동일 평면 상의 전방위 물체에 대해 감지할 수 있다.
도 19는 송신 미러(300) 및 수신 미러(400)의 면 수가 2개인 경우이고, 도 20은 송신 미러(300) 및 수신 미러(400)의 면 수가 4개인 경우이다.
다음으로, 상기와 같이 구성되는 본 발명의 실시예에 따른 라이다 스캐닝 장치의 동작 과정을 설명한다.
송신부(100)로부터 반사 미러(200) 방향으로 레이저 빔이 조사되면, 반사 미러(200)는 입사되는 레이저 빔을 반사시켜서 송신 미러(300)로 입사되도록 한다.
송신 미러(300)는 반사 미러(200)에서 반사된 레이저 빔을 전방위로 방사시킨다. 이때, 송신 미러(300)는 회전 모터(600)에 의해 회전되고, 송신 미러(300)의 각 면은 각각 다른 직선 기울기를 가지므로, 여러 측정고도로 레이저 빔을 방사시킬 수 있다. 한편, 수신부(500)가 단일채널인 경우, 송신 미러(300) 주위에는 빔 차단부(700)가 형성되고, 빔 차단부(700)에 의해 어느 한 방향으로만 레이저 빔이 방사된다.
방사된 레이저 빔은 대상체에서 반사되어 수신 미러(400)로 입사된다. 이때, 수신 미러(400)는 회전 모터(600)에 의해 회전되고, 수신 미러(400)의 각 면은 곡면으로 형성되어, 수신 미러(400)에 의해 반사된 레이저 빔은 수신부(500)로 집광된다. 이때, 수신 미러(400)의 각 면은 각각 다른 곡선 기울기를 가지므로, 여러 측정고도에서 입사되는 레이저 빔을 반사시켜서 수신부(500)로 집광시킬 수 있다.
이상, 본 발명의 일 실시예에 대하여 설명하였으나, 해당 기술 분야에서 통상의 지식을 가진 자라면 특허청구범위에 기재된 본 발명의 사상으로부터 벗어나지 않는 범위 내에서, 구성 요소의 부가, 변경, 삭제 또는 추가 등에 의해 본 발명을 다양하게 수정 및 변경시킬 수 있을 것이며, 이 또한 본 발명의 권리범위 내에 포함된다고 할 것이다.
100 : 송신부
200 : 반사 미러
300 : 송신 미러 400 : 수신 미러
500 : 수신부 600 : 회전 모터
700 : 빔 차단부 800 : 무게 보상부
300 : 송신 미러 400 : 수신 미러
500 : 수신부 600 : 회전 모터
700 : 빔 차단부 800 : 무게 보상부
Claims (5)
- 레이저 빔을 조사하는 송신부;
상기 송신부로부터 조사되는 레이저 빔을 반사시키는 반사 미러;
상기 반사 미러로부터 반사된 레이저 빔을 전방위로 방사시키며, 다각뿔 형상으로 형성되며 각 면의 기울기가 상이한 송신 미러;
상기 송신 미러에서 방사된 후, 대상체에서 반사된 레이저 빔을 수신하며, 각 면의 곡률이 상이한 다면으로 형성된 수신 미러;
상기 수신 미러에서 반사된 레이저 빔을 수신하는 수신부;
상기 송신 미러와 수신 미러를 회전시키는 회전 모터;
를 포함하는 라이다 스캐닝 장치.
- 청구항 1에 있어서,
상기 수신 미러의 각 면은, 상기 송신 미러의 각 면이 하방향으로 연장되어 형성된 것을 특징으로 하는 라이다 스캐닝 장치.
- 청구항 1에 있어서,
상기 수신부는 상기 반사 미러 상부에 이격되어 형성된 것을 특징으로 하는 라이다 스캐닝 장치.
- 청구항 1에 있어서,
상기 송신부와 상기 수신부는 상기 송신 미러의 위치를 기준으로 상측의 동일한 공간에 형성된 것을 특징으로 하는 라이다 스캐닝 장치.
- 청구항 1에 있어서,
상기 송신 미러와 이격되어 형성되며, 일 방향이 개방된 링 형상으로 형성된 빔 차단부를 포함하는 것을 특징으로 하는 라이다 스캐닝 장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170014209A KR101918683B1 (ko) | 2017-02-01 | 2017-02-01 | 라이다 스캐닝 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170014209A KR101918683B1 (ko) | 2017-02-01 | 2017-02-01 | 라이다 스캐닝 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20180089625A true KR20180089625A (ko) | 2018-08-09 |
| KR101918683B1 KR101918683B1 (ko) | 2019-02-08 |
Family
ID=63251294
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020170014209A KR101918683B1 (ko) | 2017-02-01 | 2017-02-01 | 라이다 스캐닝 장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101918683B1 (ko) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020092058A1 (en) * | 2018-11-01 | 2020-05-07 | Waymo Llc | Lidar with tilted and offset optical cavity |
| KR20200131491A (ko) * | 2019-05-14 | 2020-11-24 | 현대모비스 주식회사 | 라이다 장치 |
| KR20210025777A (ko) * | 2019-08-28 | 2021-03-10 | (주)카네비컴 | 라이다 장치 및 이의 동작 방법 |
| EP3792653A1 (de) * | 2019-09-12 | 2021-03-17 | Riegl Laser Measurement Systems GmbH | Laserscanner |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101687994B1 (ko) | 2016-04-29 | 2016-12-20 | (주) 위키옵틱스 | 라이다 발광 시스템 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3810045B2 (ja) * | 1998-12-01 | 2006-08-16 | 本田技研工業株式会社 | レーダ装置 |
| JP5402772B2 (ja) * | 2010-03-25 | 2014-01-29 | 株式会社日本自動車部品総合研究所 | 光レーダ装置 |
| JP5729358B2 (ja) * | 2011-09-22 | 2015-06-03 | 株式会社リコー | 光ビームスキャナ及びレーザレーダユニット |
| JP6123163B2 (ja) * | 2012-03-21 | 2017-05-10 | 株式会社豊田中央研究所 | 距離測定装置 |
-
2017
- 2017-02-01 KR KR1020170014209A patent/KR101918683B1/ko active IP Right Grant
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101687994B1 (ko) | 2016-04-29 | 2016-12-20 | (주) 위키옵틱스 | 라이다 발광 시스템 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020092058A1 (en) * | 2018-11-01 | 2020-05-07 | Waymo Llc | Lidar with tilted and offset optical cavity |
| US11662465B2 (en) | 2018-11-01 | 2023-05-30 | Waymo Llc | LIDAR with tilted and offset optical cavity |
| KR20200131491A (ko) * | 2019-05-14 | 2020-11-24 | 현대모비스 주식회사 | 라이다 장치 |
| KR20210025777A (ko) * | 2019-08-28 | 2021-03-10 | (주)카네비컴 | 라이다 장치 및 이의 동작 방법 |
| EP3792653A1 (de) * | 2019-09-12 | 2021-03-17 | Riegl Laser Measurement Systems GmbH | Laserscanner |
| WO2021047846A1 (de) * | 2019-09-12 | 2021-03-18 | Riegl Laser Measurement Systems Gmbh | Laserscanner |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101918683B1 (ko) | 2019-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11774557B2 (en) | Distance measurement instrument with scanning function | |
| US20210215825A1 (en) | Distance detection device | |
| JP2021131539A (ja) | センサーシステム及びその方法 | |
| EP3273267A1 (en) | Lidar device | |
| US10788574B2 (en) | LIDAR device and LIDAR system including the same | |
| KR101785253B1 (ko) | 라이다 장치 | |
| KR101918683B1 (ko) | 라이다 스캐닝 장치 | |
| US10073165B2 (en) | Distance measurement instrument with scanning function | |
| US10775485B2 (en) | LIDAR device and system comprising the same | |
| CN210142187U (zh) | 一种距离探测装置 | |
| US11662463B2 (en) | Lidar apparatus and method | |
| KR102350621B1 (ko) | 라이다 장치 | |
| US11237255B2 (en) | LiDAR system | |
| CN111352125A (zh) | 同轴宏扫描仪系统 | |
| KR102350613B1 (ko) | 비회전형 전방향 라이다 장치 | |
| CN110531369A (zh) | 一种固态激光雷达 | |
| CN111263898A (zh) | 一种光束扫描系统、距离探测装置及电子设备 | |
| KR102178376B1 (ko) | 전방위 무회전 스캐닝 라이다 시스템 | |
| US20210025986A1 (en) | Scanning device and measuring device | |
| US20220082665A1 (en) | Ranging apparatus and method for controlling scanning field of view thereof | |
| JP2023020552A (ja) | 測量装置 | |
| JP2017125765A (ja) | 対象物検出装置 | |
| US11372109B1 (en) | Lidar with non-circular spatial filtering | |
| CN117355765A (zh) | 一种检测方法及装置 | |
| JP6812776B2 (ja) | 測距センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| AMND | Amendment | ||
| X701 | Decision to grant (after re-examination) | ||
| GRNT | Written decision to grant |