KR20170127430A - 센서 오차를 검출, 분류 및/또는 완화하는 방법 및 시스템 - Google Patents
센서 오차를 검출, 분류 및/또는 완화하는 방법 및 시스템 Download PDFInfo
- Publication number
- KR20170127430A KR20170127430A KR1020177024265A KR20177024265A KR20170127430A KR 20170127430 A KR20170127430 A KR 20170127430A KR 1020177024265 A KR1020177024265 A KR 1020177024265A KR 20177024265 A KR20177024265 A KR 20177024265A KR 20170127430 A KR20170127430 A KR 20170127430A
- Authority
- KR
- South Korea
- Prior art keywords
- sensor
- error
- equation
- confidence level
- outputs
- Prior art date
Links
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/28—Testing of electronic circuits, e.g. by signal tracer
- G01R31/282—Testing of electronic circuits specially adapted for particular applications not provided for elsewhere
- G01R31/2829—Testing of circuits in sensor or actuator systems
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B23/00—Testing or monitoring of control systems or parts thereof
- G05B23/02—Electric testing or monitoring
- G05B23/0205—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults
- G05B23/0218—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults characterised by the fault detection method dealing with either existing or incipient faults
- G05B23/0221—Preprocessing measurements, e.g. data collection rate adjustment; Standardization of measurements; Time series or signal analysis, e.g. frequency analysis or wavelets; Trustworthiness of measurements; Indexes therefor; Measurements using easily measured parameters to estimate parameters difficult to measure; Virtual sensor creation; De-noising; Sensor fusion; Unconventional preprocessing inherently present in specific fault detection methods like PCA-based methods
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B23/00—Testing or monitoring of control systems or parts thereof
- G05B23/02—Electric testing or monitoring
- G05B23/0205—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults
- G05B23/0218—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults characterised by the fault detection method dealing with either existing or incipient faults
- G05B23/0224—Process history based detection method, e.g. whereby history implies the availability of large amounts of data
- G05B23/0227—Qualitative history assessment, whereby the type of data acted upon, e.g. waveforms, images or patterns, is not relevant, e.g. rule based assessment; if-then decisions
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B9/00—Safety arrangements
- G05B9/02—Safety arrangements electric
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B23/00—Testing or monitoring of control systems or parts thereof
- G05B23/02—Electric testing or monitoring
- G05B23/0205—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults
- G05B23/0218—Electric testing or monitoring by means of a monitoring system capable of detecting and responding to faults characterised by the fault detection method dealing with either existing or incipient faults
- G05B23/0224—Process history based detection method, e.g. whereby history implies the availability of large amounts of data
- G05B23/024—Quantitative history assessment, e.g. mathematical relationships between available data; Functions therefor; Principal component analysis [PCA]; Partial least square [PLS]; Statistical classifiers, e.g. Bayesian networks, linear regression or correlation analysis; Neural networks
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Electromagnetism (AREA)
- General Engineering & Computer Science (AREA)
- Testing Or Calibration Of Command Recording Devices (AREA)
- Testing And Monitoring For Control Systems (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
본 개시물은 서브시스템의 부분적인 정성적이고 정량적인 지식을 사용하여 센서 오차를 자동적으로 검출, 분류 및/또는 완화하기 위한 방법 및 시스템을 제공한다. 다양한 예들에서, 센서 고장 검출은 인과관계, 상관관계, 등식 및 부등식의 시스템, 및 연관된 로직을 커버하는 맞춤 설계된 표현 기법을 이용하여 수행된다. 이러한 로직은 센서의 신뢰도 레벨을 반복적으로 지정하기 위한 알고리즘적인 단계들의 세트에 의해 기술된다. 센서 고장 분류는 바이어스, 드리프트, 곱셈 캘리브레이션 오차, 정밀도 열화 및 스파이크 오차를 드러내도록 이용될 수 있는 수학적 기법 및 통계적 기법을 결합함으로써 수행된다. 또한, 센서 고장 완화도 식별된 바이어스, 드리프트, 곱셈 캘리브레이션 오차, 정밀도 열화 및 스파이크 오차에 수행된다.
Description
본 발명은 센서 오차를 검출, 분류 및/또는 완화하는 방법 및 시스템에 관한 것이다. 특히, 본 발명은 정확하고 광범위한 전 시스템에 걸친 계산적 또는 수학적 모델이 이용가능하지 않은 복잡한 시스템에서의 오차 검출, 분류 및 완화와 관련되지만 이것으로 한정되는 것은 아니다.
현존하는 센서 고장 검출 프로세스는 통상적으로 하드웨어 리던던시 원리 및/또는 분석적 리던던시 원리에 기초하여 동작한다. 하드웨어 리던던시 방식은 신호(들)의 모사거나 상관된 판독치를 가진 다수의 센서를 이용하는 반면에, 분석적 리던던시 방식은 측정되는 시스템의 수학적 모델에 의존하여 기대된 값 또는 형상을 생성한다.
하드웨어 리던던시에 기초한 기법에서, 센서 고장은 다수의 지정된 센서들 사이의 기대된 상관관계 및/또는 일치가 존재하지 않을 경우 진단된다. 특히, 상관된/모사된 센서들의 세트 내의 센서가 주된 컴포넌트 분석(Principal Component Analysis), 독립적 컴포넌트 분석(Independent Component Analysis), 인자 분석(factor analysis) 또는 최소화된 평균 제곱 오차(Minimized Mean Squared Error)와 같은 기법을 사용하여 고장났는지를 체크하기 위하여 측정 모델 및 센서 네트워크 모델이 채용된다.
분석적 리던던시에 기초한 기법에서, 측정되는 신호의 기대값은 시스템의 계산적 모델에 의해 계산된다. 절대 값이거나 신호의 형상의 관점에서의 기준치로부터의 측정된 신호의 편차가 센서 고장을 진단하기 위해서 채용된다. 소프트웨어-기초 시스템 모델은 측정되는 변수의 합리적으로 정확한 추정을 생성할 필요가 있고, 시스템의 물리-기초 기술로부터, 인공지능 구조로 표현된 경험칙(heuristics)/경험 법칙(예를 들어 퍼지 로직 또는 규칙 기초 시스템)으로부터 개발되거나, 통계적 학습 기법을 완전하게 사용하여 작동하도록 알려진 센서 네트워크의 과거 데이터로부터 추론될 수 있다.
특허 문헌과 학술 문헌에서의 센서 고장 검출의 두 개의 클래스의 특정한 예들이 이하 후술된다.
US 6,016,465 은 분석적 리던던시에 기초한 방법을 기술하는데, 여기에서 센서 고장은 실제 값 대신에 기대된 기준으로부터의 측정된 신호 형상의 편차로써 검출된다. 이러한 방법에서, 변경된 측정된 신호와 대응하는 변경된 기준 신호의 유한 시간 윈도우에 걸친 아웃라인들이 상관 계수를 이용하여 비교된다. 기준 신호는 측정되는 시스템의 소프트웨어 모델에 의해 생성되고, 승산(multiplication) 인자, 평균 레벨의 감산 및 변경된 기준 신호로부터의 값들의 임의의 조합에 의해 수정된다. 측정된 신호에 대한 변경이 유사한 방식으로 수행된다. 양자의 시리즈, 즉 기준 및 측정된 시리즈는 미리 규정된 편차 임계 내에서 최근 값 및 비교되는 그들의 형상으로 연속적으로 업데이트된다.
US 7,286,917 은 차량 속도 센서 고장을 검출하기 위한, 분석적 리던던시 원리에 기초한 방법을 기술한다. 후술되는 흐름도에서 설명되는 바와 같이, 이러한 시스템 모델은 측정된 속도가 센서 고장을 표시하는지 여부를 결정하는 경험칙들의 세트에 의해 제공된다. 측정된 속도가 임계 아래이고, 연료 공급률이 임계보다 크며, 엔진 속도가 최소 임계보다 크면, 기어는 중립에 있지 않고 컨버터 모드에 있지 않으며 고장이 로깅되는 것보다 적어도 수 배 높다.
US 8,521,354 는 내연 기관 내의 공기 흐름량, O2 흡입, 연료 분사의 센서에 있는 고장을 진단하기 위한 방법을 기술한다. 이러한 방법은 하드웨어 리던던시 원리(즉 다수의 센서가 중요한 양의 측정을 모사함), 및 분석적 리던던시(즉 추정 모델이 측정되는 양의 기대값을 계산함)를 결합한다(이러한 특허의 도 3 및 도 8 을 참조한다). 예를 들어, EGR 값은 상이한 측정들로부터 두 개의 상이한 방법으로 계산되고, EGR 맵으로부터의 이론값과 비교된다. 연료 주입 및 공기흐름량 센서 고장은 기대값의 실시간 계산과의 더 간단한 비교에서 진단된다.
US 5,636,137 은 특히 파워 지원 스티어링 시스템을 위한 것이지만 이들로 한정되는 것은 아닌 센서 고장 검출 기능을 포함하는 피드백 제어를 기술한다. 이러한 방법은 하드웨어 리던던시에 의존하는데, 두 개의 광검출기 유닛이 입력 및 출력 사이의 각도 변위 또는 인가된 토크를 나타내는 LED 광을 독립적으로 측정한다. 광검출기에 의해 생성된 신호들의 합산이 변하면 센서 고장(들)이 있음이 표시된다.
US 6,598,195 는 센서 고장 검출을 위한 하드웨어 리던던시 접근법을 기술한다. 각각의 센서의 모델링된 센서 값은 다른 센서 값들의 세트의 함수로서 주어지고(이러한 특허의 도 1 에 있는 센서 일관성 모델), 및 기대값으로부터의 임의의 편차가 임계를 벗어나면 센서들의 네트워크에 고장이 발생하였음을 표시한다. 가설 테스팅 및 최대 윈스(maximum wins) 전략은 네트워크 내에 고장이 진단되면 고장난 센서를 격리시킨다. 그러면 실제 측정된 값을 모델링된 값으로 치환함으로써 센서 고장 수용(accommodation)이 수행된다.
US 5,554,969 는 경험 법칙에 의해 제공된 시스템 모델로 휠 조향 각도 센서 고장을 검출하기 위한 분석적 리던던시 접근법을 기술한다. 후방 휠 조향 각도 센서에 있는 고장의 검출은 후방 휠 조향 각도 센서 값과 타겟 후방 휠 스티어링 각도 사이의 타겟 편차가 미리 결정된 편차 값을 초과하는지 여부 및 타겟 편차가 미리 결정된 편차 값을 초과하는 생성 시간 지속기간이 미리 결정된 시간 기간에 걸쳐 연속되는지 여부에 기초하여 수행된다. 또한, 후방 휠 조향 각도 센서에 있는 고장의 검출은, 4-륜 조향 시스템에 있는 모터에 인가되는 서보 전류 내의 단조 변화, 후방 휠 스티어링 각도의 추정된 편차에 있는 단조 변화, 및 서보 전류와 후방 휠 조향 각도의 추정된 편차에 있는 동일 방향성 단조 변화와 같은 조건이 만족될 경우, 후방 휠 스티어링 각도의 추정된 편차의 축적된 값이 미리 결정된 임계 값 a를 초과하는지 여부에 기초하여 수행된다.
Silva, JC 등 "A knowledge based system approach for sensor fault modelling, detection and mitigation". Expert Systems with Applications, 2012, pp 10977-10989 는 공통 센서 고장(바이어스, 드리프트, 스케일링)을 검출하기 위한, 고장 검출 및 명확화를 위한 인공 신경망(Artificial Neural Network; ANN)으로부터 유래된 의미 네트워크, 객체 배향 모델 및 규칙의 조합을 기술한다. ANN은 데이터로부터 고장을 정확하게 검출하고 명확화하도록 학습하는 머신 학습 기법이다. 센서 고장 검출은 분석적 리던던시로 수행되고, 고장 완화는 부분적인 센서 리던던시 및 센서 정정을 이용하여 수행된다.
Xu, X. 등 "Online sensor calibration monitoring and fault detection for chemical processes". Maintenance and Reliability Conference, 1998 은 다음 도면에서 주어지는 기구 감시 및 캘리브레이션 검증 시스템을 위한 인공 신경망을 기술한다. ANN은 본질적으로 시스템을 모델링하고 (정정된) 측정된 신호와 비교되기 위한 추정치를 생성한다. 둘 사이의 차이가 고장을 진단하는 통계적 결정 모듈로 공급되고, 그렇지 않으면 잔차의 분산 및 평균의 프로파일에 기초한다.
Rajagopal, R. 등 "Distributed online simultaneous fault detection for multiple sensors". Information Processing in Sensor Networks, 2008 은 시변 잡음 환경에 대하여 센서 네트워크 내의 다수의 고장을 검출하기 위한 분산형, 온라인, 순차 알고리즘을 제공한다. 이러한 알고리즘은 이웃만이 정보를 교환하도록 요구하면서, 이웃하는 센서의 상관관계 통계에서의 변화 포인트를 검출함으로써 작동한다. 이러한 알고리즘은 검출 지연 및 잘못된 알람 확률에 대한 보장을 제공한다. 이러한 방법은 하드웨어 리던던시를 이용하고, 작동하는 이웃 센서들이 상관된 변수를 측정할 것, 결함이 있는 센서와 이웃하는 동작 센서의 측정들이 상관되지 않을 것, 및 연속적인 고장들 사이의 평균 시간이 환경에 있는 큰 변화들 사이의 시간보다 길지 않을 것을 요구한다.
Kulla, J. "Detection, identification and quantification of sensor fault". Mechanical Systems and Signal Processing, October 2013, vol. 40(1), pp. 208-221 은 네트워크 내의 다른 센서가 있으면 각각의 센서를 조건부 확률 밀도 함수로서 모델링함으로써 바이어스, 이득, 드리프트, 정밀도 열화, 노이즈 및 완전한 고장을 검출하기 위한 하드웨어 리던던시 접근법을 기계적. 네트워크 내의 각각의 센서는, 일반화된 확률 비율을 가진 다수의 가정적인 테스트를 사용하여 식별된 최소 평균 제곱 오차 추정 및 센서 고장 비율을 사용하여 모델링된다.
하드웨어 리던던시 기법은 일반적으로 실무상 유효성을 유지하는 모사(replication) 및/또는 센서 모델을 요구한다. 센서 모델이 만족되지 않으면, 이러한 방법은 실패할 것이다. 하드웨어 리던던시는 또한 고가이다(일반적으로 모사 때문에).
분석적 리던던시 기법은 측정된 변수의 추정된 값/형상에 의존하기 때문에 일반적으로 합리적으로 정확한 시스템 모델을 요구한다. 기본적인 물리학으로부터 매우 복잡한 시스템을 위해서 이러한 모델을 발전시키는 것은 높은 계산 비용을 수반할 수 있고, 해양 선박과 같이 부분적으로 관찰가능한 시변 환경에서 동작하는 일부 복잡한 시스템을 위해서는 아예 가능하지 않을 수도 있다. 전체 시스템 거동의 경험칙 또는 경험 법칙은 시스템이 동작하는지에 대한 합리적으로 견실한 모델로 발전될 수 있지만, 일반적으로 애플리케이션 특정성이 매우 높고 오랜 관찰 기간이 필요하다. 또한, 관찰 노이즈 및 시변 환경은 흔히 분석적 리던던시 접근법에서 잘못된 긍정적 결과나 참된 부정적 결과를 초래할 수 있다. 데이터로부터 모델을 학습하는 것은 매력적인 옵션이지만, 역시 많은 양의 데이터가 필요하고, 당장의 환경이 훈련 데이터 분포와 크게 다른 경우에는 잘 작동하지 않을 것이다.
통상적으로, 종래 기술은 작동하기 위해서 양호한 시스템 모델 및/또는 센서 모델 및/또는 견실한 경험 법칙 및/또는 광범위한 고품질 동작 데이터를 필요로 한다.
가장 넓은 의미에서, 다양한 예들은 센서 오차를 자동적으로 검출, 분류 및/또는 완화하는 방법 및 시스템을 제공한다.
제 1 양태에 따르면, 복수 개의 서브시스템 및 상기 서브시스템과 연관된 다수의 센서를 가지는 시스템 내의 센서 오차를 검출하는 방법으로서, 각 센서는 적어도 하나의 각각의 센서 출력을 생성하고, 상기 방법은, 상기 센서들 중 두 개 이상의 기대된 센서 출력을 서로 연관시키는, 상기 서브시스템들의 복수 개의 원리를 식별하는 단계; 계산하기 적합한 시스템 방정식들(system equations)의 세트에 의해 상기 원리들을 표현하는 단계; 상기 센서 출력을 수반하는 각각의 시스템 방정식이 만족되는지 여부 및 상기 시스템 방정식 내의 다른 센서 출력들의 알려진 신뢰성(reliability)의 정도에 기초하여, 상기 센서 출력들 각각의 신뢰성의 정도를 추론하는 단계; 및 상기 추론에 기초하여, 상기 센서 출력들 각각에 신뢰도 레벨(trustworthiness level)을 지정하는 단계를 포함하는, 센서 오차 검출 방법이 제공된다.
식별된 서브시스템의 원리는 제 1 원리로부터, 즉 언더라잉 엔지니어링 또는 물리적 관련성으로부터 유도될 수 있지만, 시간이 지남에 따른 시스템 또는 서브시스템의 동작의 경험으로부터 유도되는 경험적인 "경험 법칙"도 역시 포함할 수 있다.
이러한 양태의 방법은, 부분적인 정성적이거나 정량적 지식이 전체 시스템을 이루는 컴포넌트/서브시스템에 대해서 이용가능한 복잡한 시스템에서 사용되도록 설계된다. 그러나, 바람직하게는 포괄적인 시스템 모델은 요구되지 않는다. 이러한 양태의 방법의 적용가능 분야도 특정 시스템으로 한정되지 않는데, 그 이유는 이러한 방법이 경험칙 기초 분석적 리던던시 기법과 달리 시스템의 임의의 서브세트에 대한 범용 물리학 기초 규칙에서 동작할 수 있기 때문이다.
이러한 양태의 방법은, 비록 하드웨어 리던던시가 완전한 센서 고장의 경우에는 완화하는 것을 개선할 수 있지만, 이러한 리던던시에 대한 필요성을 제거할 수 있다.
이러한 방법은 센서 신호들 사이의 상호관련성 및 내부 일관성에 의존하기 때문에, 이러한 양태의 방법은 동작 환경이 변하거나 시스템이 드리프트되는 경우에도 유효성을 유지할 수 있다.
바람직하게는, 이러한 양태의 방법은 시스템 및 센서의 부분적인 정성적이고 정량적인 지식을 사용한다. 센서 고장 검출은, 다양한 센서 출력들 사이에 인과관계, 상관관계, 등식 및 부등식을 포함할 수 있는 맞춤 설계된 표현 기법, 및 연관된 로직으로 수행될 수 있다. 이러한 로직은 신뢰도 레벨을 센서로 반복적으로 지정하기 위한 알고리즘적인 단계들의 세트일 수 있다.
그러므로 이러한 방법은 종합적이고 정확한 시스템 모델이 없이 센서 고장을 자동적으로 검출할 수 있을 수 있다. 이것은 센서 고장 검출을 위하여, 시스템/서브시스템의 이용가능한 부분적이며 정성적이고 정량적인 지식을 캡쳐하고 이용할 수 있다.
특정 실시예들에서, 상기 방법은, 상기 추론하는 단계 이전에, 상기 센서(들)에 대한 선험적 정보에 기초하여 상기 센서들 중 하나 이상에 신뢰도 레벨을 지정하는 단계를 포함할 수 있다. 그러면 특히 신뢰가능하다고 알려진 센서들이 그렇다고 사전 분류될 수 있게 하거나, 시스템 방정식들에 기초한 추론을 수행하기 전에 특정 센서의 신뢰도에 대한 지식을 유사하게 통합하는 것을 가능하게 할 수 있다.
추론하는 단계는, 상기 시스템 방정식들을 수반된 신호들의 개수 및 그러한 신호들의 신뢰도에 기초하여 정렬하고, 가장 많은 신호 및 가장 높은 신뢰성의 정도를 가지는 방정식으로부터 시작하여 정렬된 순서로 상기 방정식들에 걸쳐 수행될 수 있다. 이러한 접근법은 신호의 신뢰성 또는 신뢰도가, 어떤 센서가 신뢰가능한지 여부에 대해 시스템이 가장 낮은 불확정성을 가지는 상황으로부터 시작해서 추론될 수 있게 한다.
특정 실시예들에서, 상기 신뢰도 레벨을 지정하는 단계는, a) 독립적으로 검증될 수 있는 임의의 센서 출력을 식별하고 이러한 출력에 매우 높은 신뢰도를 지정하며; 모든 다른 신호에 중간 신뢰도를 지정하는 서브-단계; b) 각각의 방정식에 수반된 센서 출력들의 개수에 기초하여 상기 시스템 방정식들을 정렬하는 서브-단계; c) 각각의 신뢰도 레벨에 지정된 출력들의 개수를 카운트하는 서브-단계; d) 시스템 방정식들 중 센서 출력들의 가장 적은 개수를 수반하는 것을 선택하는 서브-단계; e) 상기 방정식 내의 출력들에: i) 상기 방정식이 인과관계, 상관관계, 또는 등식이고 상기 방정식이 수반된 센서 출력에 의해 만족되면, 상기 방정식 내의 모든 출력들에 매우 높은 신뢰도를 지정하고; ii) 상기 방정식이 인과관계, 상관관계, 또는 등식이고 상기 방정식이 수반된 센서 출력에 의해 만족되지 않으면, 매우 높거나 매우 낮은 신뢰도 레벨이 지정되지 않은 두 개 이상의 센서 출력이 상기 방정식 내에 포함되는지 여부를 결정하여: 이러한 출력들이 두 개 이상 존재하면, 낮은 신뢰도 레벨을 그러한 출력들에 지정하고; 그리고 이러한 출력이 오직 하나 존재하면, 매우 낮은 신뢰도 레벨을 해당 출력에 지정하며; iii) 상기 방정식이 부등식이고 상기 부등식이 만족되면, 이전에 매우 높거나 매우 낮은 신뢰도 레벨이 지정된 바 없는 상기 방정식 내의 임의의 신호에 높은 신뢰도 레벨을 지정하고; iv) 상기 방정식이 부등식이고 상기 부등식이 만족되지 않으면, 이전에 매우 높거나 매우 낮은 신뢰도 레벨이 지정된 바 없는 상기 방정식 내의 임의의 신호에 낮은 신뢰도 레벨을 지정하여, 신뢰도를 지정하는 서브-단계; e) 가장 많은 개수의 센서 출력을 이전에 처리된 표현식들과 공유하는 상기 시스템 방정식들 중 추가적인 시스템 방정식을 선택하고 모든 표현식들이 처리될 때까지 상기 서브-단계 d)를 반복하는 서브-단계; f) 각각의 센서에, 상기 센서의 센서 출력에 지정된 신뢰도 레벨에 따라서 신뢰도 레벨을 지정하는 서브-단계; g) 관련이 있으면, 임의의 모사된(replicated) 센서 출력들을 그러한 모사된 센서 출력들 내의 최고 신뢰도 레벨을 가지는 센서 출력만을 이용하여 병합하는 서브-단계; h) 각각의 신뢰도 레벨에 지정된 출력들의 개수를 카운트하고, 이전의 카운트의 결과와 비교하며; 변화되었으면 상기 서브-단계 d)부터 반복하고; 변화되지 않았으면 신뢰도 레벨의 지정을 완료하는 서브-단계를 수반한다.
이러한 양태의 방법은 전술된 바람직한 및 선택적인 피쳐들의 일부 또는 전부를 임의의 조합으로 포함하거나 포함하지 않을 수 있다.
제 2 양태에 따르면, 센서 오차 분류 방법으로서, 전술된 제 1 양태에 따른 방법을 사용하여, 센서가 센서 오차를 가지는 것으로 결정하는 단계; 상기 오차가 스파이크 오차, 바이어스 오차, 드리프트, 곱셈 캘리브레이션 오차 또는 정밀도 열화 오차를 수반하는지를 결정하도록, 시스템 방정식 및 상기 센서로부터의 이력(historic) 센서 출력 데이터를 처리하고, 이러한 결정을 고려하여 상기 오차를 분류하는 단계; 및 상기 오차가 상기 오차들 중 임의의 것을 수반하지 않으면, 상기 오차를 미지(unknown)로 분류하는 단계를 포함하는, 센서 오차 분류 방법이 제공된다.
센서 고장 분류는 바이어스, 드리프트, 곱셈 캘리브레이션 오차, 정밀도 열화 및 스파이크 오차를 드러내도록 이용될 수 있는 수학적 기법 및 통계적 기법을 결합함으로써 수행될 수 있다. 그러면 센서 고장은 적용가능한 경우 바이어스, 캘리브레이션 오차(곱셈), 단일 스파이크, 드리프트, 및 정밀도 열화로 분류될 수 있다. 다른 오차, 예를 들어 총 고장 또는 랜덤 고장은 미지(unknown)로 분류될 수 있다.
특정 실시예들에서, 센서 오차가 스파이크 오차를 수반하는지 여부를 검출하기 위하여, 상기 방법은, 상기 이력 센서 출력 데이터로부터 극고 및 극저 데이터를 제거하는 서브-단계; 상기 센서 출력을 포함하는 시스템 방정식을 재평가하고, 신뢰도에 변화가 있는지 여부를 결정하는 서브-단계; 및
신뢰도에 변화가 있으면, 상기 센서가 스파이크 오차를 겪은 것으로 분류하는 서브-단계를 수반한다.
특정 실시예들에서 상기 이력 센서 출력 데이터를 처리하고, 이러한 결정을 고려하여 상기 오차를 분류하는 단계는, 인자 x(t), t 및 1 을 사용하여 최대 일치(agreement)를 얻기 위해서, 등식을 수반하는 임의의 시스템 방정식들에 단계적 회귀분석을 수행하는 단계로서, 상기 인자들은 각각, 등식들과의 일치를 최대화하는 이러한 인자들 각각의 곱셈 인자(multiplicative factor)를 획득하기 위한 신호, 시간 인덱스 및 바이어스인, 단계를 포함할 수 있다. 예를 들어 이러한 인자들을 사용한 선형 회귀분석에 의해 최대 일치(agreement)가 획득될 수 있다.
이러한 처리 이후에, 오차의 타입은 이제 i) x(t)의 곱셈 인자가 1 보다 크면, 곱셈 캘리브레이션 오차가 결정되고; ii) t의 곱셈 인자가 10-3보다 크면, 드리프트 오차가 결정되며; 또는 iii) 바이어스 항의 승산 인자(multiplication factor)가 10-3보다 크면, 바이어스 오차가 결정되는 바와 같이 결정될 수 있다.
특정 실시예들에서, 상기 이력 센서 출력 데이터를 처리하고, 이러한 결정을 고려하여 상기 오차를 분류하는 단계는, 일차 고역 통과 필터로 상기 신호를 필터링하는 단계; 푸리에 변환된 필터링된 신호의 에너지를 계산하는 단계; 및 증가된 에너지 레벨이 계산되면, 정밀도 열화 오차가 결정되는 단계를 수반한다.
바람직하게는, 오차가 미지로 분류되면, 이러한 방법은 시스템의 운영자에게 경고하는 추가적인 단계를 포함한다.
이러한 양태의 방법은 전술된 바람직한 및 선택적인 피쳐들의 일부 또는 전부를 임의의 조합으로 포함하거나 포함하지 않을 수 있다.
제 3 양태에 따르면, 센서 오차를 검출, 분류 및 완화하기 위한 방법으로서, 해당 양태의 바람직하고 선택적인 피쳐의 일부, 전부를 포함하거나 아무것도 포함하지 않으면서, 전술된 제 2 양태에 따른 방법을 사용하여 센서 오차를 검출 및 분류하는 단계; 및 검출된 오차를 완화시키는 단계를 포함하는 방법이 제공된다.
바람직하게는, 상기 완화시키는 단계는, 검출된 오차가 스파이크 오차면, 상기 센서로부터 미래 출력 데이터에 있는 값을 제거하고, 이들을 이웃하는 시간 포인트의 평균값으로 대체하는 단계를 포함한다.
바람직하게는 상기 완화시키는 단계는, 검출된 오차가 바이어스 오차, 드리프트 또는 곱셈 캘리브레이션 오차면, 상기 센서로부터의 미래 출력 데이터를 대수적으로 처리하여 상기 오차를 제거하는 단계를 포함한다.
바람직하게는 상기 완화시키는 단계는, 검출된 오차가 정밀도 열화 오차면, 상기 센서로부터의 미래 출력 데이터를 이차 이상의 필터로 필터링하여 더 부드러운 효과를 생성하는 단계를 포함한다.
이러한 양태의 방법은 전술된 바람직한 및 선택적인 피쳐들의 일부 또는 전부를 임의의 조합으로 포함하거나 포함하지 않을 수 있다.
추가적인 양태들은: 컴퓨터에서 실행되면 컴퓨터가 제 1, 제 2 또는 제 3 양태 중 임의의 하나의 방법을 수행하게 하는 코드를 포함하는 컴퓨터 프로그램; 컴퓨터에서 실행되면, 컴퓨터가 제 1, 제 2 또는 제 3 양태 중 임의의 하나의 방법을 수행하게 하는 코드를 포함하는 컴퓨터 프로그램을 저장하는 컴퓨터 판독가능 매체; 및 제 1, 제 2 또는 제 3 양태 중 임의의 하나의 방법을 수행하도록 프로그램된 컴퓨터 시스템을 제공할 수 있다.
제 4 양태에 따르면, 복수 개의 서브시스템 및 상기 서브시스템과 연관된 다수의 센서를 가지는 시스템 내의 센서 오차를 검출하는 시스템으로서, 각 센서는 적어도 하나의 각각의 센서 출력을 생성하고, 상기 시스템은, 프로세서로서, 상기 센서들 중 두 개 이상의 기대된 센서 출력을 서로 연관시키는, 상기 서브시스템들의 복수 개의 원리를 식별하고; 상기 원리들을 표현하는, 계산하기 적합한 시스템 방정식들의 세트를 결정하며; 상기 센서 출력을 수반하는 각각의 시스템 방정식이 만족되는지 여부 및 상기 시스템 방정식 내의 다른 센서 출력들의 알려진 신뢰성(reliability)의 정도에 기초하여, 상기 센서 출력들 각각의 신뢰성의 정도를 추론하고; 그리고 상기 추론에 기초하여, 상기 센서 출력들 각각에 신뢰도 레벨(trustworthiness level)을 지정하도록 구성되는, 프로세서를 포함하는, 센서 오차 검출 시스템이 제공된다.
식별된 서브시스템의 원리는 제 1 원리로부터, 즉 언더라잉 엔지니어링 또는 물리적 관련성으로부터 유도될 수 있지만, 시간이 지남에 따른 시스템 또는 서브시스템의 동작의 경험으로부터 유도되는 경험적인 "경험 법칙"도 역시 포함할 수 있다.
이러한 양태의 시스템은, 부분적인 정성적이거나 정량적 지식이 전체 시스템을 이루는 컴포넌트/서브시스템에 대해서 이용가능한 복잡한 시스템에서 사용되도록 설계된다. 그러나, 바람직하게는 포괄적인 시스템 모델은 요구되지 않는다. 경험칙 기초 분석적 리던던시 기법과 달리, 이러한 양태의 시스템의 적용가능성도 특정한 시스템으로 한정되지 않는다.
이러한 양태의 시스템은, 비록 하드웨어 리던던시가 완전한 센서 고장의 경우에는 완화하는 것을 개선할 수 있지만, 이러한 리던던시에 대한 필요성을 제거할 수 있다.
이러한 시스템이 센서 신호들 사이의 상호관련성 및 내부 일관성에 의존하기 때문에, 이러한 양태의 시스템은 동작 환경이 변하거나 시스템이 드리프트되는 경우에도 유효한 결과를 여전히 생성할 수 있다.
바람직하게는, 이러한 양태의 시스템은 시스템 및 센서의 부분적인 정성적이고 정량적인 지식을 사용한다. 센서 고장 검출은, 다양한 센서 출력들 사이에 인과관계, 상관관계, 등식 및 부등식을 포함할 수 있는 맞춤 설계된 표현 기법, 및 연관된 로직으로 수행될 수 있다. 이러한 로직은 신뢰도 레벨을 센서로 반복적으로 지정하기 위한 알고리즘적인 단계들의 세트일 수 있다.
그러므로 이러한 시스템은 종합적이고 정확한 시스템 모델이 없이 센서 고장을 자동적으로 검출할 수 있을 수 있다. 이것은 센서 고장 검출을 위하여, 시스템/서브시스템의 이용가능한 부분적이며 정성적이고 정량적인 지식을 캡쳐하고 이용할 수 있다.
특정 실시예들에서, 프로세서는 상기 추론을 수행하기 전에, 상기 센서(들)에 대한 선험적 정보(a priori information)에 기초하여, 신뢰도 레벨을 센서 중 하나 이상에게 지정하도록 더욱 구현될 수 있다. 그러면 특히 신뢰가능하다고 알려진 센서들이 그렇다고 사전 분류될 수 있게 하거나, 시스템 방정식들에 기초한 추론을 수행하기 전에 특정 센서의 신뢰도에 대한 지식을 유사하게 통합하는 것을 가능하게 할 수 있다.
프로세서는, 시스템 방정식들을 수반된 신호들의 개수 및 그러한 신호들의 신뢰도에 기초하여 정렬하고, 가장 많은 신호 및 가장 높은 신뢰성의 정도를 가지는 방정식으로부터 시작하여 정렬된 순서로 상기 방정식들에 걸쳐 작동하도록 더욱 구현될 수 있다. 이러한 접근법은 신호의 신뢰성 또는 신뢰도가, 어떤 센서가 신뢰가능한지 여부에 대해 시스템이 가장 낮은 불확정성을 가지는 상황으로부터 시작해서 추론될 수 있게 한다.
특정 실시예들에서, 프로세서는, a) 독립적으로 검증될 수 있는 임의의 센서 출력을 식별하고 이러한 출력에 매우 높은 신뢰도를 지정하며; 모든 다른 신호에 중간 신뢰도를 지정하는 서브-단계; b) 각각의 방정식에 수반된 센서 출력들의 개수에 기초하여 상기 시스템 방정식들을 정렬하는 서브-단계; c) 각각의 신뢰도 레벨에 지정된 출력들의 개수를 카운트하는 서브-단계; d) 시스템 방정식들 중 센서 출력들의 가장 적은 개수를 수반하는 것을 선택하는 서브-단계; e) 상기 방정식 내의 출력들에: i) 상기 방정식이 인과관계, 상관관계, 또는 등식이고 상기 방정식이 수반된 센서 출력에 의해 만족되면, 상기 방정식 내의 모든 출력들에 매우 높은 신뢰도를 지정하고; ii) 상기 방정식이 인과관계, 상관관계, 또는 등식이고 상기 방정식이 수반된 센서 출력에 의해 만족되지 않으면, 매우 높거나 매우 낮은 신뢰도 레벨이 지정되지 않은 두 개 이상의 센서 출력이 상기 방정식 내에 포함되는지 여부를 결정하여: 이러한 출력들이 두 개 이상 존재하면, 낮은 신뢰도 레벨을 그러한 출력들에 지정하고; 그리고 이러한 출력이 오직 하나 존재하면, 매우 낮은 신뢰도 레벨을 해당 출력에 지정하며; iii) 상기 방정식이 부등식이고 상기 부등식이 만족되면, 이전에 매우 높거나 매우 낮은 신뢰도 레벨이 지정된 바 없는 상기 방정식 내의 임의의 신호에 높은 신뢰도 레벨을 지정하고; iv) 상기 방정식이 부등식이고 상기 부등식이 만족되지 않으면, 이전에 매우 높거나 매우 낮은 신뢰도 레벨이 지정된 바 없는 상기 방정식 내의 임의의 신호에 낮은 신뢰도 레벨을 지정하여, 신뢰도를 지정하는 서브-단계; e) 가장 많은 개수의 센서 출력을 이전에 처리된 표현식들과 공유하는 상기 시스템 방정식들 중 추가적인 시스템 방정식을 선택하고 모든 표현식들이 처리될 때까지 상기 서브-단계 d)를 반복하는 서브-단계; f) 각각의 센서에, 상기 센서의 센서 출력에 지정된 신뢰도 레벨에 따라서 신뢰도 레벨을 지정하는 서브-단계; g) 관련이 있으면, 임의의 모사된(replicated) 센서 출력들을 그러한 모사된 센서 출력들 내의 최고 신뢰도 레벨을 가지는 센서 출력만을 이용하여 병합하는 서브-단계; h) 각각의 신뢰도 레벨에 지정된 출력들의 개수를 카운트하고, 이전의 카운트의 결과와 비교하며; 변화되었으면 상기 서브-단계 d)부터 반복하고; 변화되지 않았으면 신뢰도 레벨의 지정을 완료하는 서브-단계에 의하여 신뢰도 레벨을 지정하도록 구현될 수 있다.
이러한 양태의 시스템은 전술된 바람직한 및 선택적인 피쳐들의 일부 또는 전부를 임의의 조합으로 포함하거나 포함하지 않을 수 있다.
제 5 양태에 따르면, 센서 오차를 검출 및 분류하는 시스템으로서, 전술된 제 4 양태에 기술되는 바와 같은 센서 오차를 검출하기 위한 시스템; 시스템 방정식 및 상기 센서로부터의 이력(historic) 센서 출력 데이터를 처리하여 상기 오차가 스파이크 오차, 바이어스 오차, 드리프트, 곱셈 캘리브레이션 오차 또는 정밀도 열화 오차를 수반하는지 결정하고, 결정을 고려하여 상기 오차를 분류하며, 오차가 상기 오차 중 임의의 것을 수반하지 않으면 상기 오차를 미지로 분류하도록 구성되는 오차 분류기를 포함하는, 센서 오차 검출 및 분류 시스템이 제공된다.
센서 고장 분류는 바이어스, 드리프트, 곱셈 캘리브레이션 오차, 정밀도 열화 및 스파이크 오차를 드러내도록 이용될 수 있는 수학적 기법 및 통계적 기법을 결합함으로써 수행될 수 있다. 그러면 센서 고장은 적용가능한 경우 바이어스, 캘리브레이션 오차(곱셈), 단일 스파이크, 드리프트, 및 정밀도 열화로 분류될 수 있다. 다른 오차, 예를 들어 총 고장 또는 랜덤 고장은 미지(unknown)로 분류될 수 있다.
특정 실시예들에서, 상기 오차 분류기는, 상기 이력 센서 출력 데이터로부터 극고 및 극저 데이터를 제거하는 서브-단계; 상기 센서 출력을 포함하는 시스템 방정식을 재평가하고, 신뢰도에 변화가 있는지 여부를 결정하는 서브-단계; 그리고 신뢰도에 변화가 있으면, 상기 센서가 스파이크 오차를 겪은 것으로 분류하는 서브-단계에 의하여 스파이크 오차를 검출하도록 구성된다.
특정 실시예들에서 상기 오차 분류기는, 인자 x(t), t 및 1 을 사용하여 최대 일치를 얻기 위해서, 등식을 수반하는 임의의 시스템 방정식들에 단계적 회귀분석을 수행하는 단계로서, 상기 인자들은 각각, 등식들과의 일치를 최대화하는 이러한 인자들 각각의 곱셈 인자(multiplicative factor)를 획득하기 위한 신호, 시간 인덱스 및 바이어스인, 단계에 의하여 상기 시스템 방정식 및 이력 센서 출력 데이터를 처리하도록 구성된다.
그러면, 상기 오차 분류기는 상기 단계적 회귀분석에 기초하여, i) x(t)의 곱셈 인자가 1 보다 크면 오차를 곱셈 캘리브레이션 오차로서; ii) t의 곱셈 인자가 10-3보다 크면 오차를 드리프트 오차로서; 또는 iii) 바이어스 항의 곱셈 인자가 10-3보다 크면 오차를 바이어스 오차로서 분류하도록 구성될 수 있다.
특정 실시예들에서 상기 오차 분류기는, 일차 고역 통과 필터로 상기 신호를 필터링하고; 푸리에 변환된 필터링된 신호의 에너지를 계산하며; 그리고 증가된 에너지 레벨이 계산되면, 정밀도 열화 오차를 결정하도록 구성된다.
바람직하게는, 상기 시스템은, 시스템의 운영자로 디렉팅되는 가시 또는 가청 알람을 더 포함하고,
상기 오차 분류기는 오차가 미지로 분류되면 상기 알람을 사용하여 운영자에게 경고하도록 더욱 구성된다.
제 6 양태에 따르면, 센서 오차를 검출, 분류 및 완화하기 위한 시스템으로서, 해당 양태의 선택적이고 바람직한 피쳐의 일부, 전부를 포함하거나 아무것도 포함하지 않으면서, 전술된 제 5 양태에 기술된 바와 같이 센서 오차를 검출 및 분류하기 위한 시스템; 및 검출된 오차를 완화시키기 위한 신호 정정 디바이스를 포함하는 시스템이 제공된다.
바람직하게는, 상기 신호 정정 디바이스는, 검출된 오차가 스파이크 오차면, 상기 센서로부터 미래 출력 데이터에 있는 값을 제거하고, 이들을 이웃하는 시간 포인트의 평균값으로 대체하도록 구성된다.
바람직하게는, 상기 신호 정정 디바이스는, 검출된 오차가 바이어스 오차, 드리프트 또는 곱셈 캘리브레이션 오차면, 상기 센서로부터의 미래 출력 데이터를 대수적으로 처리하여 상기 오차를 제거하도록 구성된다.
바람직하게는, 상기 신호 정정 디바이스는, 검출된 오차가 정밀도 열화 오차면, 상기 센서로부터의 미래 출력 데이터를 이차 이상의 필터로 필터링하여 더 부드러운 효과를 생성하도록 구성된다.
바람직하게는, 전술된 제 4, 제 5 및 제 6 실시예의 시스템들은 전술된 제 1, 제 2 및 제 3 양태 각각의 방법을 수행하도록 구현되지만, 그와 같이 구성될 필요는 없다.
실시예들은 첨부 도면을 참조하여 예시를 통하여 이제 설명될 것이다:
도 1 은 다양한 실시예에 따르는 시스템의 개략도를 도시한다;
도 2 는 다양한 실시예에 따르는, 센서 고장 검출, 분류 및 완화 방법에 있는 단계들을 예시한다; 그리고
도 3a 내지 도 3d 는 다양한 실시예에 따른 방법의 센서 고장 검출에서 사용되는 추론 방법에 포함되는 단계들을 보여주는 흐름도를 도시한다.
도 1 은 다양한 실시예에 따르는 시스템의 개략도를 도시한다;
도 2 는 다양한 실시예에 따르는, 센서 고장 검출, 분류 및 완화 방법에 있는 단계들을 예시한다; 그리고
도 3a 내지 도 3d 는 다양한 실시예에 따른 방법의 센서 고장 검출에서 사용되는 추론 방법에 포함되는 단계들을 보여주는 흐름도를 도시한다.
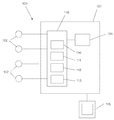
도 1 은 센서 오차를 검출하고 해당 센서 오차를 분류 및 완화하기 위한 다양한 실시예에 따른 시스템(100)의 개략적인 개관을 도시한다. 시스템(100)은 메모리(104) 및 프로세서(103)를 가지는 컴퓨터(101)를 포함한다. 프로세서(103)에는 복수 개의 센서(102)가 연결된다(예시를 위하여 이러한 센서는 오직 4 개만 도시되었지만, 이러한 센서는 임의의 개수가 있을 수 있고 거의 모든 실제 시스템에스 그 개수는 훨씬 더 많을 수 있다는 것이 이해될 것이다).
프로세서는 이러한 실시예들의 방법에 대하여 더 상세히 후술될 다수의 태스크를 수행한다. 이러한 프로세스는 메모리(104) 내에 저장되거나 단말기(105) 또는 다른 데이터 입력 디바이스를 통해 사용자에 의해 입력되는 정보에 기초하여 시스템 방정식들의 세트를 결정하는 것을 포함한다. 시스템 방정식은 센서(102)에 의해 모니터링되는 프로세스, 장치 또는 시스템의 서브시스템에 대한 원리에 기초하고, 상기 센서들 중 두 개 이상의 기대된 센서 출력을 서로 관련시킨다. 프로세서(103)는 메모리(104)에 시스템 방정식을 저장한다.
시스템 방정식이 결정되면, 프로세서(103)는 모니터링되는 시스템의 진행중인 상태에 대한 데이터를 센서(102)로부터 수신한다. 저장된 시스템 방정식은 프로세서(103)에서 실행되고 있는 센서 고장 검출 모듈(110)에 의해 사용된다. 검출된 오차는 역시 프로세서(103)에서 실행되고 있는 센서 고장 분류 모듈(120)에서 분류되고 센서 고장 완화 모듈(130)에 의해 완화될 수 있다. 이러한 모듈들은 후술되는 방법을 실행한다.
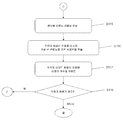
도 2 는 다양한 실시예에 따른 센서 고장 검출, 분류 및 완화 방법에 있는 단계들을 도시하는데, 이들은 전술된 시스템(100)의 프로세서에 의해 실행될 수 있다. 이러한 방법은 센서 고장 검출(10), 센서 고장 분류(20) 및 센서 고장 완화(30) 기능을 제공한다.
이러한 방법은:
a) 센서들의 네트워크 내의 결함 센서(들)를 검출하고
b) 적용가능한 경우 센서 고장을: 바이어스, 캘리브레이션 오차(곱셈), 단일 스파이크, 드리프트, 및 정밀도 열화로 분류하되, 다른 오차, 예를 들어 총 고장 또는 랜덤 고장은 "기타(others)"로 그룹화하고,
c)(b)에서 규정된 고장 타입을 "기타"를 제외하고 완화시키도록 구성된다.
이러한 단계 각각은 적합한 경우, 해양 선박 동작으로부터의 예들에 기초하여 더 상세히 후술될 것이다. 그러나, 당업자는 이러한 방법의 적용가능성이 해양 선박 동작으로 한정되지 않으며 전술된 선행 기술 문서들에서 식별된 분야들 모두를 포함하는, 센서 고장 검출을 사용하는 임의의 분야에도 적용될 수 있다는 것을 이해할 것이다.
센서 고장 검출
센서 고장 검출 방법(10)은 복수 개의 센서 신호(1)를 수신한다.
센서 고장 검출 방법(10)은 컴포넌트 또는 서브시스템의 부분적인, 정성적/정량적 지식을 이용하여 센서가 고장인지 여부를 추론한다. 해양 선박 동작에서의 서브시스템의 예들은: 전력 배전 및 생성 서브시스템, 추진 서브시스템, 선박 선체(hull), 등이다. 여기에서 전력 배전 및 생성 서브시스템이 일 예로서 사용된다.
일 실시예에 따르면, 센서 고장 검출 방법(10)은 정성적이고 정량적인 서브시스템 거동을 표현하고 평가하기 위한 계산 프레임워크 및 센서 기능에 대한 추론을 수행하기 위한 추론 방법으로 이루어진다.
표현 프레임워크는 4 개의 타입의 관련성(2)으로 이루어지고, 이들은 사전에: 인과관계(정성적), 상관관계(정성적), 등식(정량적) 및 부등식(정량적)으로 설정된다.
예를 들어, 디젤 전력 발전기에서, 연료 주입률 및 생성된 전력량은 언제나 참이어야 하는 인과관계에 의해 연결된다. 생성된 전력과 발생된 열은 언제나 참이어야 하는 상관관계를 형성한다(손실이 비선형이기 때문임). 전력 시스템 내의 다양한 지점에서의 전력 평형은 언제나 참이어야 하는 방정식들의 일 예이다. 서브시스템, 예를 들어 디젤 엔진의 제어기에 내재적인 동작 한계는 언제나 참이어야 하는 부등식의 예들이다. 연산자는 조합형(combinatorial)일 수 있고, 즉 방정식은 부등식, 등의 원인일 수 있다.
인과관계, 상관, 방정식 및 부등식은: 시간 지연된 상관 계수, 상관 계수, 및 등식 및 부등식 계산 각각으로 평가된다. 이러한 평가는 시간 상에서 연속적으로 수행된다.
추론 방법은, 도 3a 내지 도 3d 의 흐름도에 역시 도시되는 후속하는 알고리즘 흐름도를 적용함으로써 그 측정이 수반되는 평가된 거동에 기초하여, 센서 고장의 확률을 식별한다:
i. 신뢰성이 있다고 독립적으로 검증된 신호가 존재한다면 그것을 식별한다. "5"(매우 높음)의 신뢰도 레벨을 이러한 신호에 지정한다. "3"(중간)의 신뢰도 레벨을 다른 신호에 지정한다(S100).
ii. 평가된 표현식들(즉 인과관계, 상관관계, 방정식 또는 부등식)을 해당 표현식에 수반된 측정된 신호들의 개수에 기초하여 정렬한다(S101).
iii. 각각의 신뢰도 레벨 "1", "2", "3", "4", "5"로 지정된 신호들의 카운트를 관리한다(S102).
iv. 최소 개수의 신호를 수반하는 표현식으로부터 시작한다(S103). 신호 품질 또는 신뢰도의 레벨을 다음과 같이 지정한다:
a. 인과관계, 상관관계, 또는 등식 표현식이 만족되면(S104, S108), 수반된 모든 신호가 신뢰성이 있다고 간주되고 "5"의 신뢰도 레벨을 가지도록 마킹될 수 있다(S109). 신뢰도 레벨 "5"를 지정하는 것은 이러한 신호를 수반하는 모든 표현식들 내의 신호들에 대해 유효하다.
b. 인과관계, 상관관계, 또는 등식 표현식이 만족되지 않고, 신뢰도 스케일 상에서 "1"(매우 낮음) 또는 "5"가 지정되지 않은 두 개 이상의 신호가 존재하면(S110), 이러한 신호는 "2"(낮음)로 마킹된다(S111). 이러한 신호가 오직 하나 뿐이라면, 이것은 "1"로 마킹된다(S112). "1"(매우 낮음)을 임의의 신호로 지정하는 것은 이러한 신호를 수반하는 모든 표현식들 내의 신호에 대해 유효하다.
c. 부등식 표현식이 만족되면(S105), 그 안에 수반되고 "5" 또는 "1"로 마킹된 바 없는 임의의 신호는 다른 표현식의 처리를 통해 "4"(높음)로 지정되어야 한다(S107).
d. 부등식 표현식이 만족되지 않으면, 해당 표현식 안에 수반되고 "5" 또는 "1"로 마킹된 바 없는 임의의 신호는 다른 표현식들의 처리를 통해 레벨 "2"로 지정된다(S106).
v. 처리된 표현식들과 가장 많은 개수의 신호를 공유하는 다음 표현식으로 진행하고, 모든 표현식들이 처리될 때까지 단계 (iv)를 반복한다(S113, S114).
vi. 센서들을 연관된 신호의 신뢰도 레벨로 마킹한다(S115).
vii. 모사된 신호의 임의의 그룹(적용가능한 경우에는 하드웨어 리던던시)을 병합하여 신호들의 목록을 필요한 최소로 간결화한다(prune). 각각의 투플(tuple) 내에서, 가장 강한 신뢰도 레벨을 가지는 복제본(duplicate)을 추출하고, 이것을 다음 라운드에서 이용한다(S116).
viii. "1", "2", "3", "4", 및 "5"가 지정된 신호들의 개수를 카운트한다(S117). 이전의 라운드에서 얻어진 카운트로부터 변하지 않았으면 중단하고, 그렇지 않으면 단계 (iv)로 진행한다(S118).
이러한 스케일에서 신뢰도 레벨은 다음의 암시적 의미를 가진다: 5 는 명백히 정확함; 4 는 아마도 정확함; 3 은 아마도 부정확하지 않음; 하지만 2 및 1 은 후속하는 임의의 계산적 방법에 대해서 명백하게 좋지 않다. 신뢰도 값 4 가 지정된 신호가 임의의 공지된 오차에 속하지 않으면(이것은 더 일반적이며, 미지의 오차는 예견되지 않고 매우 드문 것으로 간주됨), 이것은 임의의 오차를 가지지 않고, 정상 요동만을 가진다. 값 3 을 가지는 신호의 경우에도 비슷하다. 2 및 1 의 신뢰도 레벨에서, 센서 신호는 고장 검출에 있어서 일부 방정식과 크게 상충되고 있으며(즉 이러한 신호가 신뢰성을 가지기 위해서는, 알려지거나 신뢰성이 있다고 논리적으로 추론된 관련성 내의 일부 다른 신호가 사실상 신뢰성이 없어야 함), 따라서 이것이 알려진 고장에 속하지 않더라도, 이것은 센서를 정정 또는 교체하기 위해서 반드시 체크되어야 할 고장이다.
센서 고장 분류
실시예의 다음 단계는 센서 고장을 바이어스, 드리프트, 곱셈 캘리브레이션 오차, 스파이크 오차 및 정밀도 열화로 분류하도록 설계되는 방법(20)이다.
일반적으로 말하면, 바이어스란 센서 값에 대한 상수 오프셋을 암시한다. 드리프트는 시간 의존적 바이어스이다. 곱셈 캘리브레이션 오차(multiplicative calibration error)란 실제 신호 레벨을 얻기 위해서 센서 판독치가 미지의 인자로 나누어져야 한다는 것을 암시한다. 정밀도 열화는 센서 내의 노이즈 레벨이 증가되었다는 것을 암시한다. 스파이크 오차는 극히 큰 양의 또는 음의 값으로의 갑작스런 천이를 나타낸다.
센서 고장을 분류하기 위한 방법은, "5"보다 적은 신뢰도 레벨이 지정된 센서들의 세트의 콜렉션을 수반하고, 이들을 다음 모듈들 각각으로 공급한다:
i. 스파이크 오차 검출기 모듈(21). 이러한 모듈은 데이터의 1% 최대 및 최소 값을 정리하고 센서의 측정된 신호가 수반된 표현식들을 재평가하도록 구현된다. 신뢰도 레벨이 변하는 임의의 센서는 스파이크 오차를 겪은 바 있는 것으로 로깅된다(logged).
ii. 바이어스, 드리프트 및 곱셈 캘리브레이션 오차 검출기 모듈(22). 이러한 모듈은 인자: x(t)인 신호, t인 시간 인덱스 및 1인 바이어스가 있는 최대 일치를 얻어서 일치를 최대화하는 x(t), t에 대한 곱셈 인자를 획득하기 위해서, 등식 표현식들에 단계적 회귀분석을 수행하도록 구성된다. 예를 들어 선형 회귀분석은 측정된 데이터와의 맞춤을 최대화하기 위해서 x(t), t 및 1 에 수행될 수 있다(예를 들어 a. x(t) + b. t + c가 측정된 데이터와 잘 맞춤되도록 하는 a, b 및 c를 찾음). x(t)에 대해서 1 보다 큰 곱셈 인자는 곱셈 캘리브레이션 오차를 나타낸다. 바이어스 항(상수)에 대한, 제로에 가까운 매우 작은 값(1E-3)보다 큰 곱셈 인자는 바이어스 오차를 나타내고, 시간 인덱스 상에서는 센서 드리프트를 나타낸다.
iii. 정밀도 열화 검출기 모듈(23). 이러한 모듈은 일차 고역 통과 필터로 신호를 필터링하고, 푸리에 변환된 필터링된 신호의 에너지를 계산하도록 구성된다. 필터링된 신호에 비교할 때 에너지 레벨이 증가하는 것은, 노이즈 레벨이 증가되었고 센서가 정밀도 열화 오차를 겪는다는 것을 나타낸다.
위의 오차 중 하나를 가지는 것으로 식별되지 않는 고장 센서(신뢰도 스케일에서 "1" 및 "2"의 레벨이 지정됨)는 미지의 오차를 가지고 있는 것으로 분류되고, 운영자가 이러한 센서를 점검하거나 교체하도록 경고(24)가 운영자에게 발생된다.
센서 고장 완화
실시예의 다음 단계는 센서 오차를 완화하도록 설계된 방법(30)이다. 식별된 오차(미지의 오차 제외) 각각에 대해서, 다음의 정정 조치가 적용된다:
스파이크 오차: 매우 높은 레벨로 증가하는 절대 값을 이웃하는 시간 포인트의 평균값으로 제거한다.
바이어스, 드리프트 및 곱셈 캘리브레이션 오차: 제거 바이어스, 드리프트 및 곱셈 오차를 제거하도록 대수 연산을 수행한다. 바이어스는 계산된 바이어스의 가산(또는 감산)에 의해 제거될 수 있고, 드리프트는 가산/감산으로 유사하게 제거되는 시간 의존적 바이어스이며(바이어스에 의해 시간 승산됨 - 따라서 시간에 따라 감소하지 않는 것으로 알려짐), 곱셈 캘리브레이션은 식별된 인자에 의해 나눔으로써 제거된다.
정밀도 열화: 증가된 필터 차수로 신호를 필터링, 즉 센서로부터의 신호를 이용하지 않고 저역 통과 필터링된 신호를 사용함.
다른 실시예는, 센서 오동작 및 열악한 데이터를 검출하기 위한 동반되는 로직에 기초함으로써 임의의 오동작이 이러한 로직을 적용함으로써 식별될 수 있게 하는, 모니터링될 시스템 내의의 디자인(즉 다양한 가격 대 정확도/강건성 트레이드오프의 센서들을 조합함)을 제공한다. 디자인 프로세스는, 임의의 센서 오동작이 증명가능하게 검출될 수 있도록 보장하면서 센서들의 총가격을 최소화하도록 실행될 수 있다. 후자의 성능은, 결정이 센서 판독치만에 기초하여 이루어지는 임무 임계(mission critical) 자동/원격 제어된 차량의 일부로서 중요할 수 있다. 신호 내의 임의의 "낯선(strange)" 레벨은 오동작하는 시스템 또는 고장이 발생한 센서 중 어느 하나에 의해 야기될 수 있다. 이러한 센서 조합 및 로직은 낯선 판독치가 관찰될 경우 두 원인들을 분리할 수 있을 것이다.
시스템 및 방법이 전술된 예시적인 실시예와 함께 기술되었지만, 본 명세서가 있으면 많은 균등한 변형 및 변경이 당업자에게 명백해질 것이다. 따라서, 전술된 예시적인 실시예들은 예시적이고 비한정적인 것으로 간주된다. 본 발명의 사상 및 범위에서 벗어나지 않으면서, 다양한 변형이 설명된 실시예에 이루어질 수도 있다.
또한, 실시예들은 플로차트, 흐름도, 데이터 흐름도, 구조도, 또는 블록도로서 묘사되는 프로세서로서 설명될 수도 있다는 점에 주의한다. 흐름도가 순차적인 프로세스로서 동작들을 설명할 수도 있지만, 많은 동작들은 병행하여 또는 동시에 수행될 수 있다. 덧붙여서, 동작들의 순서는 재배열될 수도 있다. 프로세스는 자신의 동작이 완료되면 종단되는데, 도면에 포함되지 않는 추가적 단계들을 가질 수 있다. 프로세스는 방법, 기능, 프로시저, 서브루틴, 서브프로그램 등에 대응할 수도 있다. 프로세스가 함수에 해당하는 경우, 그것의 종료는 호출 함수 또는 메인 함수로의 기능의 반환에 해당한다.
본 명세서에서 개시될 때, "컴퓨터 판독가능 매체"라는 용어는, 판독 전용 메모리(ROM), 랜덤 액세스 메모리(RAM), 자기적 RAM, 코어 메모리, 자기적 디스크 스토리지 매체, 광학적 스토리지 매체, 플래시 메모리 디바이스 및/또는 정보를 저장하기 위한 다른 머신 판독가능 매체를 포함하는, 데이터를 저장하기 위한 하나 이상의 디바이스를 나타낼 수 있다. 하지만, "컴퓨터-판독가능 매체"라는 용어는 휴대용 또는 고정식 저장 디바이스, 광학적 저장 디바이스, 무선 채널 및 명령(들) 및/또는 데이터를 저장, 보유 또는 운반할 수 있는 다양한 다른 매체로 한정되지 않는다.
더욱이, 실시예들은 하드웨어, 소프트웨어, 펌웨어, 미들웨어, 마이크로코드, 하드웨어 기술 언어, 또는 이들의 임의의 조합에 의하여 구현될 수도 있다. 소프트웨어, 펌웨어, 미들웨어 또는 마이크로코드로 구현될 때, 필요한 태스크들을 수행하는 프로그램 코드 또는 코드 세그먼트들은 저장 매체와 같은 머신 판독가능 매체에 저장될 수도 있다. 프로세서(들)가 필요한 태스크들을 수행할 수도 있다. 코드 세그먼트는 프로시저, 함수, 서브프로그램, 프로그램, 루틴, 서브루틴, 모듈, 소프트웨어 패키지, 클래스, 또는 명령들, 데이터 구조들, 또는 프로그램문들(program statements)의 임의의 조합을 나타낼 수도 있다. 코드 세그먼트는, 정보, 데이터, 독립변수들(arguments), 매개변수들, 또는 메모리 콘텐츠들을 전달하고 및/또는 수신하는 것에 의해 다른 코드 세그먼트 또는 하드웨어 회로에 결합될 수도 있다. 정보, 독립변수들, 매개변수들, 데이터 등은, 메모리 공유, 메시지 패싱, 토큰 패싱, 네트워크 전송 등을 포함하는 임의의 적합한 수단을 경유하여 전달되거나, 포워딩되거나, 또는 송신될 수도 있다.
앞서 언급된 모든 참조 문헌들은 본 명세서에 원용에 의하여 통합된다.
Claims (32)
- 복수 개의 서브시스템 및 상기 서브시스템과 연관된 다수의 센서를 가지는 시스템 내의 센서 오차를 검출하는 방법으로서,
각 센서는 적어도 하나의 각각의 센서 출력을 생성하고,
상기 방법은,
상기 센서들 중 두 개 이상의 기대된 센서 출력을 서로 연관시키는, 상기 서브시스템들의 복수 개의 원리를 식별하는 단계;
계산하기 적합한 시스템 방정식들(system equations)의 세트에 의해 상기 원리들을 표현하는 단계;
상기 센서 출력을 수반하는 각각의 시스템 방정식이 만족되는지 여부 및 상기 시스템 방정식 내의 다른 센서 출력들의 알려진 신뢰성(reliability)의 정도에 기초하여, 상기 센서 출력들 각각의 신뢰성의 정도를 추론하는 단계; 및
상기 추론에 기초하여, 상기 센서 출력들 각각에 신뢰도 레벨(trustworthiness level)을 지정하는 단계를 포함하는, 센서 오차 검출 방법. - 제 1 항에 있어서,
상기 방법은,
상기 추론하는 단계 이전에, 상기 센서(들)에 대한 선험적 정보(a priori information)에 기초하여 상기 센서들 중 하나 이상에 신뢰도 레벨을 지정하는 단계를 더 포함하는, 센서 오차 검출 방법. - 제 1 항 또는 제 2 항에 있어서,
상기 추론하는 단계는, 상기 시스템 방정식들을 수반된 신호들의 개수 및 그러한 신호들의 신뢰도에 기초하여 정렬하고, 가장 많은 신호 및 가장 높은 신뢰성의 정도를 가지는 방정식으로부터 시작하여 정렬된 순서로 상기 방정식들에 걸쳐 수행되는, 센서 오차 검출 방법. - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 시스템 방정식들의 세트는 등식, 부등식, 상관관계(correlation) 및/또는 인과관계(causation)를 포함하는, 센서 오차 검출 방법. - 제 4 항에 있어서,
상기 신뢰도 레벨을 지정하는 단계는,
a) 독립적으로 검증될 수 있는 임의의 센서 출력을 식별하고 이러한 출력에 매우 높은 신뢰도를 지정하며; 모든 다른 신호에 중간 신뢰도를 지정하는 서브-단계;
b) 각각의 방정식에 수반된 센서 출력들의 개수에 기초하여 상기 시스템 방정식들을 정렬하는 서브-단계;
c) 각각의 신뢰도 레벨에 지정된 출력들의 개수를 카운트하는 서브-단계;
d) 시스템 방정식들 중 센서 출력들의 가장 적은 개수를 수반하는 것을 선택하는 서브-단계;
e) 상기 방정식 내의 출력들에:
i) 상기 방정식이 인과관계, 상관관계, 또는 등식이고 상기 방정식이 수반된 센서 출력에 의해 만족되면, 상기 방정식 내의 모든 출력들에 매우 높은 신뢰도를 지정하고;
ii) 상기 방정식이 인과관계, 상관관계, 또는 등식이고 상기 방정식이 수반된 센서 출력에 의해 만족되지 않으면, 매우 높거나 매우 낮은 신뢰도 레벨이 지정되지 않은 두 개 이상의 센서 출력이 상기 방정식 내에 포함되는지 여부를 결정하여:
이러한 출력들이 두 개 이상 존재하면, 낮은 신뢰도 레벨을 그러한 출력들에 지정하고; 그리고
이러한 출력이 오직 하나 존재하면, 매우 낮은 신뢰도 레벨을 해당 출력에 지정하며;
iii) 상기 방정식이 부등식이고 상기 부등식이 만족되면, 이전에 매우 높거나 매우 낮은 신뢰도 레벨이 지정된 바 없는 상기 방정식 내의 임의의 신호에 높은 신뢰도 레벨을 지정하고;
iv) 상기 방정식이 부등식이고 상기 부등식이 만족되지 않으면, 이전에 매우 높거나 매우 낮은 신뢰도 레벨이 지정된 바 없는 상기 방정식 내의 임의의 신호에 낮은 신뢰도 레벨을 지정하여, 신뢰도를 지정하는 서브-단계;
e) 가장 많은 개수의 센서 출력을 이전에 처리된 표현식들과 공유하는 상기 시스템 방정식들 중 추가적인 시스템 방정식을 선택하고 모든 표현식들이 처리될 때까지 상기 서브-단계 d)를 반복하는 서브-단계;
f) 각각의 센서에, 상기 센서의 센서 출력에 지정된 신뢰도 레벨에 따라서 신뢰도 레벨을 지정하는 서브-단계;
g) 관련이 있으면, 임의의 모사된(replicated) 센서 출력들을 그러한 모사된 센서 출력들 내의 최고 신뢰도 레벨을 가지는 센서 출력만을 이용하여 병합하는 서브-단계;
h) 각각의 신뢰도 레벨에 지정된 출력들의 개수를 카운트하고, 이전의 카운트의 결과와 비교하며; 변화되었으면 상기 서브-단계 d)부터 반복하고; 변화되지 않았으면 신뢰도 레벨의 지정을 완료하는 서브-단계를 수반하는, 센서 오차 검출 방법. - 센서 오차 분류 방법으로서,
제 1 항 내지 제 5 항 중 어느 한 항에 따른 방법을 사용하여, 센서가 센서 오차를 가지는 것으로 결정하는 단계;
상기 오차가 스파이크 오차, 바이어스 오차, 드리프트, 곱셈 캘리브레이션 오차 또는 정밀도 열화 오차를 수반하는지를 결정하도록, 시스템 방정식 및 상기 센서로부터의 이력(historic) 센서 출력 데이터를 처리하고, 이러한 결정을 고려하여 상기 오차를 분류하는 단계; 및
상기 오차가 상기 오차들 중 임의의 것을 수반하지 않으면, 상기 오차를 미지(unknown)로 분류하는 단계를 포함하는, 센서 오차 분류 방법. - 제 6 항에 있어서,
센서 오차가 스파이크 오차를 수반하는지 여부를 검출하기 위하여, 상기 방법은,
상기 이력 센서 출력 데이터로부터 극고 및 극저 데이터를 제거하는 서브-단계;
상기 센서 출력을 포함하는 시스템 방정식을 재평가하고, 신뢰도에 변화가 있는지 여부를 결정하는 서브-단계;
신뢰도에 변화가 있으면, 상기 센서가 스파이크 오차를 겪은 것으로 분류하는 서브-단계를 수반하는, 센서 오차 분류 방법. - 제 6 항 또는 제 7 항에 있어서,
상기 이력 센서 출력 데이터를 처리하고, 이러한 결정을 고려하여 상기 오차를 분류하는 단계는,
인자 x(t), t 및 1 을 사용하여 최대 일치(agreement)를 얻기 위해서, 등식을 수반하는 임의의 시스템 방정식들에 단계적 회귀분석을 수행하는 단계로서, 상기 인자들은 각각, 등식들과의 일치를 최대화하는 이러한 인자들 각각의 곱셈 인자(multiplicative factor)를 획득하기 위한 신호, 시간 인덱스 및 바이어스인, 단계를 포함하는, 센서 오차 분류 방법. - 제 8 항에 있어서,
i) x(t)의 곱셈 인자가 1 보다 크면, 곱셈 캘리브레이션 오차가 결정되고;
ii) t의 곱셈 인자가 10-3보다 크면, 드리프트 오차가 결정되며; 또는
iii) 바이어스 항의 승산 인자(multiplication factor)가 10-3보다 크면, 바이어스 오차가 결정되는, 센서 오차 분류 방법. - 제 6 항 내지 제 8 항 중 어느 한 항에 있어서,
상기 이력 센서 출력 데이터를 처리하고, 이러한 결정을 고려하여 상기 오차를 분류하는 단계는,
일차 고역 통과 필터로 상기 신호를 필터링하는 단계;
푸리에 변환된 필터링된 신호의 에너지를 계산하는 단계; 및
증가된 에너지 레벨이 계산되면, 정밀도 열화 오차가 결정되는 단계를 수반하는, 센서 오차 분류 방법. - 제 6 항 내지 제 10 항 중 어느 한 항에 있어서,
상기 방법은, 오차가 미지인 것으로 분류되면, 상기 시스템의 운영자에게 경고하는 단계를 더 포함하는, 센서 오차 분류 방법. - 센서 오차를 검출, 분류 및 완화하는 방법으로서,
제 6 항 내지 제 10 항 중 어느 한 항에 따라 센서 오차를 검출하고 분류하는 단계; 및
검출된 오차를 완화시키는 단계를 포함하는, 센서 오차 검출, 분류 및 완화 방법. - 제 12 항에 있어서,
상기 완화시키는 단계는,
검출된 오차가 스파이크 오차면, 상기 센서로부터 미래 출력 데이터에 있는 값을 제거하고, 이들을 이웃하는 시간 포인트의 평균값으로 대체하는 단계를 포함하는, 센서 오차 검출, 분류 및 완화 방법. - 제 12 항 또는 제 13 항에 있어서,
상기 완화시키는 단계는,
검출된 오차가 바이어스 오차, 드리프트 또는 곱셈 캘리브레이션 오차면, 상기 센서로부터의 미래 출력 데이터를 대수적으로 처리하여 상기 오차를 제거하는 단계를 포함하는, 센서 오차 검출, 분류 및 완화 방법. - 제 12 항 내지 제 14 항 중 어느 한 항에 있어서,
상기 완화시키는 단계는,
검출된 오차가 정밀도 열화 오차면, 상기 센서로부터의 미래 출력 데이터를 이차 이상의 필터로 필터링하는 단계를 포함하는, 센서 오차 검출, 분류 및 완화 방법. - 컴퓨터에서 실행되면 상기 컴퓨터가 제 1 항 내지 제 15 항 중 어느 한 항의 방법을 수행하게 하는 코드를 포함하는 컴퓨터 프로그램.
- 제 16 항에 따르는 컴퓨터 프로그램을 저장하는 컴퓨터 판독가능 매체.
- 복수 개의 서브시스템 및 상기 서브시스템과 연관된 다수의 센서를 가지는 시스템 내의 센서 오차를 검출하는 시스템으로서,
각 센서는 적어도 하나의 각각의 센서 출력을 생성하고,
상기 시스템은,
프로세서로서,
상기 센서들 중 두 개 이상의 기대된 센서 출력을 서로 연관시키는, 상기 서브시스템들의 복수 개의 원리를 식별하고;
상기 원리들을 표현하는, 계산하기 적합한 시스템 방정식들의 세트를 결정하며;
상기 센서 출력을 수반하는 각각의 시스템 방정식이 만족되는지 여부 및 상기 시스템 방정식 내의 다른 센서 출력들의 알려진 신뢰성(reliability)의 정도에 기초하여, 상기 센서 출력들 각각의 신뢰성의 정도를 추론하고; 그리고
상기 추론에 기초하여, 상기 센서 출력들 각각에 신뢰도 레벨(trustworthiness level)을 지정하도록 구성되는, 프로세서를 포함하는, 센서 오차 검출 시스템. - 제 18 항에 있어서,
상기 프로세서는,
상기 추론을 수행하기 이전에, 상기 센서(들)에 대한 선험적 정보에 기초하여 상기 센서들 중 하나 이상에 신뢰도 레벨을 지정하도록 더욱 구성되는, 센서 오차 검출 시스템. - 제 18 항 또는 제 19 항에 있어서,
상기 신뢰성의 정도를 추록할 때에, 상기 프로세서는,
상기 시스템 방정식들을 수반된 신호들의 개수 및 그러한 신호들의 신뢰도에 기초하여 정렬하고, 가장 많은 신호 및 가장 높은 신뢰성의 정도를 가지는 방정식으로부터 시작하여 정렬된 순서로 상기 방정식들을 처리하도록 구성되는, 센서 오차 검출 시스템. - 제 18 항 내지 제 20 항 중 어느 한 항에 있어서,
상기 시스템 방정식들의 세트는 등식(equalities), 부등식(inequalities), 상관관계(correlations) 및/또는 인과관계(causations)를 포함하는, 센서 오차 검출 시스템. - 제 21 항에 있어서,
상기 프로세서는,
a) 독립적으로 검증될 수 있는 임의의 센서 출력을 식별하고 이러한 출력에 매우 높은 신뢰도를 지정하며; 모든 다른 신호에 중간 신뢰도를 지정하는 서브-단계;
b) 각각의 방정식에 수반된 센서 출력들의 개수에 기초하여 상기 시스템 방정식들을 정렬하는 서브-단계;
c) 각각의 신뢰도 레벨에 지정된 출력들의 개수를 카운트하는 서브-단계;
d) 시스템 방정식들 중 센서 출력들의 가장 적은 개수를 수반하는 것을 선택하는 서브-단계;
e) 상기 방정식 내의 출력들에:
i) 상기 방정식이 인과관계, 상관관계, 또는 등식이고 상기 방정식이 수반된 센서 출력에 의해 만족되면, 상기 방정식 내의 모든 출력들에 매우 높은 신뢰도를 지정하고;
ii) 상기 방정식이 인과관계, 상관관계, 또는 등식이고 상기 방정식이 수반된 센서 출력에 의해 만족되지 않으면, 매우 높거나 매우 낮은 신뢰도 레벨이 지정되지 않은 두 개 이상의 센서 출력이 상기 방정식 내에 포함되는지 여부를 결정하여:
이러한 출력들이 두 개 이상 존재하면, 낮은 신뢰도 레벨을 그러한 출력들에 지정하고; 그리고
이러한 출력이 오직 하나 존재하면, 매우 낮은 신뢰도 레벨을 해당 출력에 지정하며;
iii) 상기 방정식이 부등식이고 상기 부등식이 만족되면, 이전에 매우 높거나 매우 낮은 신뢰도 레벨이 지정된 바 없는 상기 방정식 내의 임의의 신호에 높은 신뢰도 레벨을 지정하고;
iv) 상기 방정식이 부등식이고 상기 부등식이 만족되지 않으면, 이전에 매우 높거나 매우 낮은 신뢰도 레벨이 지정된 바 없는 상기 방정식 내의 임의의 신호에 낮은 신뢰도 레벨을 지정하여, 신뢰도를 지정하는 서브-단계;
e) 가장 많은 개수의 센서 출력을 이전에 처리된 표현식들과 공유하는 상기 시스템 방정식들 중 추가적인 시스템 방정식을 선택하고 모든 표현식들이 처리될 때까지 상기 서브-단계 d)를 반복하는 서브-단계;
f) 각각의 센서에, 상기 센서의 센서 출력에 지정된 신뢰도 레벨에 따라서 신뢰도 레벨을 지정하는 서브-단계;
g) 관련이 있으면, 임의의 모사된(replicated) 센서 출력들을 그러한 모사된 센서 출력들 내의 최고 신뢰도 레벨을 가지는 센서 출력만을 이용하여 병합하는 서브-단계;
h) 각각의 신뢰도 레벨에 지정된 출력들의 개수를 카운트하고, 이전의 카운트의 결과와 비교하며; 변화되었으면 상기 서브-단계 d)부터 반복하고; 변화되지 않았으면 신뢰도 레벨의 지정을 완료하는 서브-단계에 의하여 신뢰도 레벨을 지정하도록 구성되는, 센서 오차 검출 시스템. - 센서 오차를 검출 및 분류하는 시스템으로서,
제 18 항 내지 제 22 항 중 어느 한 항에 따라 센서 오차를 검출하기 위한 시스템;
시스템 방정식 및 상기 센서로부터의 이력(historic) 센서 출력 데이터를 처리하여 상기 오차가 스파이크 오차, 바이어스 오차, 드리프트, 곱셈 캘리브레이션 오차 또는 정밀도 열화 오차를 수반하는지 결정하고, 결정을 고려하여 상기 오차를 분류하며, 오차가 상기 오차 중 임의의 것을 수반하지 않으면 상기 오차를 미지로 분류하도록 구성되는 오차 분류기를 포함하는, 센서 오차 검출 및 분류 시스템. - 제 23 항에 있어서,
상기 오차 분류기는,
상기 이력 센서 출력 데이터로부터 극고 및 극저 데이터를 제거하는 서브-단계;
상기 센서 출력을 포함하는 시스템 방정식을 재평가하고, 신뢰도에 변화가 있는지 여부를 결정하는 서브-단계;
신뢰도에 변화가 있으면, 상기 센서가 스파이크 오차를 겪은 것으로 분류하는 서브-단계에 의하여 스파이크 오차를 검출하도록 구성되는, 센서 오차 검출 및 분류 시스템. - 제 23 항 또는 제 24 항에 있어서,
상기 오차 분류기는,
인자 x(t), t 및 1 을 사용하여 최대 일치를 얻기 위해서, 등식을 수반하는 임의의 시스템 방정식들에 단계적 회귀분석을 수행하는 단계로서, 상기 인자들은 각각, 등식들과의 일치를 최대화하는 이러한 인자들 각각의 곱셈 인자(multiplicative factor)를 획득하기 위한 신호, 시간 인덱스 및 바이어스인, 단계에 의하여 상기 시스템 방정식 및 이력 센서 출력 데이터를 처리하도록 구성되는, 센서 오차 검출 및 분류 시스템. - 제 25 항에 있어서,
상기 오차 분류기는 상기 단계적 회귀분석에 기초하여,
i) x(t)의 곱셈 인자가 1 보다 크면 오차를 곱셈 캘리브레이션 오차로서;
ii) t의 곱셈 인자가 10-3보다 크면 오차를 드리프트 오차로서; 또는
iii) 바이어스 항의 곱셈 인자가 10-3보다 크면 오차를 바이어스 오차로서 분류하도록 구성되는, 센서 오차 검출 및 분류 시스템. - 제 23 항 내지 제 25 항 중 어느 한 항에 있어서,
상기 오차 분류기는,
일차 고역 통과 필터로 상기 신호를 필터링하고;
푸리에 변환된 필터링된 신호의 에너지를 계산하며; 그리고
증가된 에너지 레벨이 계산되면, 정밀도 열화 오차를 결정하도록 구성되는, 센서 오차 검출 및 분류 시스템. - 제 23 항 내지 제 27 항 중 어느 한 항에 있어서,
상기 시스템은, 시스템의 운영자로 디렉팅되는 가시 또는 가청 알람을 더 포함하고,
상기 오차 분류기는 오차가 미지로 분류되면 상기 알람을 사용하여 운영자에게 경고하도록 더욱 구성되는, 센서 오차 검출 및 분류 시스템. - 센서 오차를 검출, 분류 및 완화하는 시스템으로서,
제 23 항 내지 제 28 항 중 어느 한 항에 따른, 센서 오차 검출 및 분류 시스템; 및
검출된 오차를 완화시키도록 구성되는 신호 정정 디바이스를 포함하는, 센서 오차 검출, 분류, 및 완화 시스템. - 제 29 항에 있어서,
상기 신호 정정 디바이스는,
검출된 오차가 스파이크 오차면, 상기 센서로부터 미래 출력 데이터에 있는 값을 제거하고, 이들을 이웃하는 시간 포인트의 평균값으로 대체하도록 구성되는, 센서 오차 검출, 분류, 및 완화 시스템. - 제 29 항 또는 제 30 항에 있어서,
상기 신호 정정 디바이스는,
검출된 오차가 바이어스 오차, 드리프트 또는 곱셈 캘리브레이션 오차면, 상기 센서로부터의 미래 출력 데이터를 대수적으로 처리하여 상기 오차를 제거하도록 구성되는, 센서 오차 검출, 분류, 및 완화 시스템. - 제 29 항 내지 제 31 항 중 어느 한 항에 있어서,
상기 신호 정정 디바이스는,
검출된 오차가 정밀도 열화 오차면, 상기 센서로부터의 미래 출력 데이터를 이차 이상의 필터로 필터링하도록 구성되는, 센서 오차 검출, 분류, 및 완화 시스템.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GBGB1501534.0A GB201501534D0 (en) | 2015-01-30 | 2015-01-30 | Methods and systems for detecting, classifying and/or mitigating sensor error |
| GB1501534.0 | 2015-01-30 | ||
| PCT/EP2016/050907 WO2016120112A1 (en) | 2015-01-30 | 2016-01-18 | Methods and systems for detecting, classifying and/or mitigating sensor error |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170127430A true KR20170127430A (ko) | 2017-11-21 |
Family
ID=52705485
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177024265A KR20170127430A (ko) | 2015-01-30 | 2016-01-18 | 센서 오차를 검출, 분류 및/또는 완화하는 방법 및 시스템 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10578667B2 (ko) |
| EP (1) | EP3250965B1 (ko) |
| KR (1) | KR20170127430A (ko) |
| GB (1) | GB201501534D0 (ko) |
| SG (1) | SG11201706031TA (ko) |
| WO (1) | WO2016120112A1 (ko) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11048249B2 (en) * | 2017-07-28 | 2021-06-29 | Siemens Aktiengesellschaft | Controlling and maintaining operational status during component failures |
| KR102435945B1 (ko) * | 2021-12-09 | 2022-08-24 | 주식회사테크블루 | 선박 설비 요소의 위험 발생에 따른 직접 및 간접 요소의 위험도 분석 방법 |
| US12111922B2 (en) | 2020-02-28 | 2024-10-08 | Nanotronics Imaging, Inc. | Method, systems and apparatus for intelligently emulating factory control systems and simulating response data |
| US12111923B2 (en) | 2019-10-08 | 2024-10-08 | Nanotronics Imaging, Inc. | Dynamic monitoring and securing of factory processes, equipment and automated systems |
| US12140926B2 (en) | 2023-07-17 | 2024-11-12 | Nanotronics Imaging, Inc. | Assembly error correction for assembly lines |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101967339B1 (ko) * | 2018-03-06 | 2019-04-09 | 단국대학교 산학협력단 | 심층학습 기반의 adas 센서 고장 진단 및 백업을 위한 장치 및 방법 |
| US10875531B2 (en) * | 2018-08-08 | 2020-12-29 | Ford Global Technologies, Llc | Vehicle lateral motion control |
| CN109506676A (zh) * | 2018-11-16 | 2019-03-22 | 中国西安卫星测控中心 | 基于回归建模的地球敏感器故障诊断方法 |
| WO2020223751A1 (en) * | 2019-05-07 | 2020-11-12 | Kontrol Gmbh | Formal verification for the development and real-time application of autonomous systems |
| CN111947702B (zh) * | 2020-07-16 | 2022-03-18 | 中广核核电运营有限公司 | 传感器交叉验证故障诊断方法、装置、计算机设备 |
| CN114637645B (zh) * | 2022-02-24 | 2022-10-14 | 深圳市双合电气股份有限公司 | 一种传感器量测数据的校验方法 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0711435B2 (ja) | 1985-07-23 | 1995-02-08 | トヨタ自動車株式会社 | 内燃機関のセンサ異常判定方法 |
| US4788398A (en) | 1987-09-30 | 1988-11-29 | General Electric Company | Temperature sensor failure detection arrangement using a heater energy counter |
| US5414645A (en) | 1991-10-25 | 1995-05-09 | Mazda Motor Corporation | Method of fault diagnosis in an apparatus having sensors |
| GB9316841D0 (en) | 1993-08-13 | 1993-09-29 | Lucas Ind Plc | Optical torque sensor incorporating sensor failure diagnostics |
| JP3216388B2 (ja) | 1994-02-02 | 2001-10-09 | 日産自動車株式会社 | 電動モータ駆動式四輪操舵装置 |
| GB9514008D0 (en) * | 1995-07-10 | 1995-09-06 | Secr Defence | Sensor fault detection system |
| JP4067062B2 (ja) | 1997-02-20 | 2008-03-26 | 株式会社デンソー | 内燃機関の電子スロットル制御装置 |
| US6594620B1 (en) | 1998-08-17 | 2003-07-15 | Aspen Technology, Inc. | Sensor validation apparatus and method |
| US6598195B1 (en) | 2000-08-21 | 2003-07-22 | General Electric Company | Sensor fault detection, isolation and accommodation |
| US7953577B2 (en) | 2004-08-25 | 2011-05-31 | Siemens Corporation | Method and apparatus for improved fault detection in power generation equipment |
| US7346469B2 (en) * | 2005-03-31 | 2008-03-18 | General Electric Company | System and method for sensor data validation |
| US7286917B2 (en) | 2005-05-04 | 2007-10-23 | Detroit Diesel Corporation | Method of detecting vehicle speed sensor failure |
| US7787969B2 (en) | 2007-06-15 | 2010-08-31 | Caterpillar Inc | Virtual sensor system and method |
| US8521354B2 (en) | 2008-08-12 | 2013-08-27 | Southwest Research Institute | Diagnosis of sensor failure in airflow-based engine control system |
| US8521468B2 (en) * | 2010-08-25 | 2013-08-27 | GM Global Technology Operations LLC | Diagnostic method for use with a vehicle dynamic control system (VDCS) |
| US9534924B2 (en) * | 2011-11-11 | 2017-01-03 | Qualcomm Incorporated | Sensor auto-calibration |
-
2015
- 2015-01-30 GB GBGB1501534.0A patent/GB201501534D0/en not_active Ceased
-
2016
- 2016-01-18 EP EP16701735.9A patent/EP3250965B1/en active Active
- 2016-01-18 US US15/544,224 patent/US10578667B2/en active Active
- 2016-01-18 WO PCT/EP2016/050907 patent/WO2016120112A1/en active Application Filing
- 2016-01-18 SG SG11201706031TA patent/SG11201706031TA/en unknown
- 2016-01-18 KR KR1020177024265A patent/KR20170127430A/ko unknown
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11048249B2 (en) * | 2017-07-28 | 2021-06-29 | Siemens Aktiengesellschaft | Controlling and maintaining operational status during component failures |
| US12111923B2 (en) | 2019-10-08 | 2024-10-08 | Nanotronics Imaging, Inc. | Dynamic monitoring and securing of factory processes, equipment and automated systems |
| US12111922B2 (en) | 2020-02-28 | 2024-10-08 | Nanotronics Imaging, Inc. | Method, systems and apparatus for intelligently emulating factory control systems and simulating response data |
| KR102435945B1 (ko) * | 2021-12-09 | 2022-08-24 | 주식회사테크블루 | 선박 설비 요소의 위험 발생에 따른 직접 및 간접 요소의 위험도 분석 방법 |
| US12140926B2 (en) | 2023-07-17 | 2024-11-12 | Nanotronics Imaging, Inc. | Assembly error correction for assembly lines |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170370985A1 (en) | 2017-12-28 |
| EP3250965B1 (en) | 2020-08-12 |
| EP3250965A1 (en) | 2017-12-06 |
| SG11201706031TA (en) | 2017-08-30 |
| GB201501534D0 (en) | 2015-03-18 |
| US10578667B2 (en) | 2020-03-03 |
| WO2016120112A1 (en) | 2016-08-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170127430A (ko) | 센서 오차를 검출, 분류 및/또는 완화하는 방법 및 시스템 | |
| US11921566B2 (en) | Abnormality detection system, abnormality detection method, abnormality detection program, and method for generating learned model | |
| US11314242B2 (en) | Methods and systems for fault detection and identification | |
| Li et al. | Particle filtering based likelihood ratio approach to fault diagnosis in nonlinear stochastic systems | |
| US6917839B2 (en) | Surveillance system and method having an operating mode partitioned fault classification model | |
| Simani | Identification and fault diagnosis of a simulated model of an industrial gas turbine | |
| US20110202488A1 (en) | Method And Apparatus For Creating State Estimation Models In Machine Condition Monitoring | |
| CN104598984A (zh) | 一种基于模糊神经网络的故障预测方法 | |
| CA2766560A1 (en) | Method of determining the influence of a variable in a phenomenon | |
| CN112416662A (zh) | 多时间序列数据异常检测方法与装置 | |
| CN113360304A (zh) | 用于对机器的异常状态进行原因分析的方法和计算单元 | |
| CN115979310B (zh) | 一种惯导系统性能退化评估方法、系统、电子设备及介质 | |
| Goebel et al. | Correcting sensor drift and intermittency faults with data fusion and automated learning | |
| Lee et al. | An enhanced prediction model for the on-line monitoring of the sensors using the Gaussian process regression | |
| CN109643484B (zh) | 在预警系统中考虑外部影响来学习最新数据的方法以及用于该方法的系统 | |
| CN114139589A (zh) | 故障诊断方法、装置、设备与计算机可读存储介质 | |
| CN117330963B (zh) | 储能电站故障检测方法、系统及设备 | |
| CN109990803A (zh) | 检测系统异常的方法、装置及传感器处理的方法、装置 | |
| CN116907772A (zh) | 桥梁结构监测传感器的自诊断与故障源鉴别方法及系统 | |
| Zhou et al. | Overview of fault detection and identification for non-linear dynamic systems | |
| Bilski | Data set preprocessing methods for the artificial intelligence-based diagnostic module | |
| Yin et al. | Sensor selection and location scheme for prognostic and health management | |
| RU2648413C1 (ru) | Способ управления режимами на основе нейросетевого диагностирования неисправностей и технического состояния электроприводного газоперекачивающего агрегата | |
| US12123749B2 (en) | Method for determining a fault for a set of sensors | |
| Rostek | Influence of multi-valued diagnostic signals on optimal sensor placement |