KR102711309B1 - 접합 시스템 및 접합 방법 - Google Patents
접합 시스템 및 접합 방법 Download PDFInfo
- Publication number
- KR102711309B1 KR102711309B1 KR1020207023886A KR20207023886A KR102711309B1 KR 102711309 B1 KR102711309 B1 KR 102711309B1 KR 1020207023886 A KR1020207023886 A KR 1020207023886A KR 20207023886 A KR20207023886 A KR 20207023886A KR 102711309 B1 KR102711309 B1 KR 102711309B1
- Authority
- KR
- South Korea
- Prior art keywords
- substrate
- wafer
- bonding
- unit
- holding
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 12
- 239000000758 substrate Substances 0.000 claims abstract description 99
- 238000003825 pressing Methods 0.000 claims abstract description 15
- 238000001179 sorption measurement Methods 0.000 claims description 57
- 238000009826 distribution Methods 0.000 claims description 39
- 238000005304 joining Methods 0.000 claims description 36
- 230000004048 modification Effects 0.000 claims description 13
- 238000012986 modification Methods 0.000 claims description 13
- 238000007619 statistical method Methods 0.000 claims description 9
- 235000012431 wafers Nutrition 0.000 description 363
- 238000012545 processing Methods 0.000 description 71
- 238000006116 polymerization reaction Methods 0.000 description 38
- 238000003384 imaging method Methods 0.000 description 35
- 238000005259 measurement Methods 0.000 description 28
- 230000007246 mechanism Effects 0.000 description 26
- 238000013519 translation Methods 0.000 description 21
- 230000005489 elastic deformation Effects 0.000 description 17
- 238000007405 data analysis Methods 0.000 description 13
- 238000012937 correction Methods 0.000 description 11
- 238000010586 diagram Methods 0.000 description 10
- 238000010438 heat treatment Methods 0.000 description 10
- 238000003331 infrared imaging Methods 0.000 description 10
- 230000007704 transition Effects 0.000 description 10
- 238000004364 calculation method Methods 0.000 description 7
- 238000001816 cooling Methods 0.000 description 7
- 230000008676 import Effects 0.000 description 7
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 7
- 238000012546 transfer Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 5
- 238000003860 storage Methods 0.000 description 5
- 238000012423 maintenance Methods 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 238000010521 absorption reaction Methods 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 239000002826 coolant Substances 0.000 description 3
- -1 oxygen ions Chemical class 0.000 description 3
- PNEYBMLMFCGWSK-UHFFFAOYSA-N Alumina Chemical compound [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 2
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 2
- MYMOFIZGZYHOMD-UHFFFAOYSA-N Dioxygen Chemical compound O=O MYMOFIZGZYHOMD-UHFFFAOYSA-N 0.000 description 2
- 229910010293 ceramic material Inorganic materials 0.000 description 2
- 230000002950 deficient Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 229910001882 dioxygen Inorganic materials 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 239000007789 gas Substances 0.000 description 2
- 230000014759 maintenance of location Effects 0.000 description 2
- 239000001301 oxygen Substances 0.000 description 2
- 229910052760 oxygen Inorganic materials 0.000 description 2
- 238000009832 plasma treatment Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 229910004298 SiO 2 Inorganic materials 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 238000000692 Student's t-test Methods 0.000 description 1
- 238000005411 Van der Waals force Methods 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 239000000498 cooling water Substances 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 229910001873 dinitrogen Inorganic materials 0.000 description 1
- 230000003028 elevating effect Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000001257 hydrogen Substances 0.000 description 1
- 229910052739 hydrogen Inorganic materials 0.000 description 1
- 125000002887 hydroxy group Chemical group [H]O* 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 229910052757 nitrogen Inorganic materials 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 125000005372 silanol group Chemical group 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 238000012353 t test Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K20/00—Non-electric welding by applying impact or other pressure, with or without the application of heat, e.g. cladding or plating
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/02002—Preparing wafers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67092—Apparatus for mechanical treatment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67098—Apparatus for thermal treatment
- H01L21/67103—Apparatus for thermal treatment mainly by conduction
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67259—Position monitoring, e.g. misposition detection or presence detection
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67288—Monitoring of warpage, curvature, damage, defects or the like
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
- H01L21/681—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment using optical controlling means
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/6838—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping with gripping and holding devices using a vacuum; Bernoulli devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L24/00—Arrangements for connecting or disconnecting semiconductor or solid-state bodies; Methods or apparatus related thereto
- H01L24/80—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K20/00—Non-electric welding by applying impact or other pressure, with or without the application of heat, e.g. cladding or plating
- B23K20/24—Preliminary treatment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/80—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected
- H01L2224/80001—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected by connecting a bonding area directly to another bonding area, i.e. connectorless bonding, e.g. bumpless bonding
- H01L2224/80009—Pre-treatment of the bonding area
- H01L2224/8001—Cleaning the bonding area, e.g. oxide removal step, desmearing
- H01L2224/80011—Chemical cleaning, e.g. etching, flux
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/80—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected
- H01L2224/80001—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected by connecting a bonding area directly to another bonding area, i.e. connectorless bonding, e.g. bumpless bonding
- H01L2224/8012—Aligning
- H01L2224/80121—Active alignment, i.e. by apparatus steering, e.g. optical alignment using marks or sensors
- H01L2224/8013—Active alignment, i.e. by apparatus steering, e.g. optical alignment using marks or sensors using marks formed on the semiconductor or solid-state body
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/80—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected
- H01L2224/80001—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected by connecting a bonding area directly to another bonding area, i.e. connectorless bonding, e.g. bumpless bonding
- H01L2224/808—Bonding techniques
- H01L2224/80894—Direct bonding, i.e. joining surfaces by means of intermolecular attracting interactions at their interfaces, e.g. covalent bonds, van der Waals forces
- H01L2224/80896—Direct bonding, i.e. joining surfaces by means of intermolecular attracting interactions at their interfaces, e.g. covalent bonds, van der Waals forces between electrically insulating surfaces, e.g. oxide or nitride layers
Landscapes
- Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Power Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Mechanical Engineering (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Pressure Welding/Diffusion-Bonding (AREA)
- Combinations Of Printed Boards (AREA)
- Liquid Crystal (AREA)
- Body Structure For Vehicles (AREA)
- Joining Of Building Structures In Genera (AREA)
Abstract
연직 방향으로 이간하여 배치되는 제 1 유지부 및 제 2 유지부를 구비하고, 상기 제 1 유지부와 상기 제 2 유지부를 상대적으로 이동시킴으로써, 상기 제 1 유지부에 유지되어 있는 제 1 기판과, 상기 제 2 유지부에 유지되어 있는 제 2 기판과의 수평 방향 위치 조정을 행하는 위치 조정부와, 상기 제 1 유지부에 유지되어 있는 상기 제 1 기판과, 상기 제 2 유지부에 유지되어 있는 상기 제 2 기판을 맞누르는 누름부와, 상기 누름부에 의해 접합된 상기 제 1 기판의 얼라이먼트 마크와 상기 제 2 기판의 얼라이먼트 마크와의 위치 어긋남을 측정하는 측정부와, 과거의 접합에 있어서 생긴 상기 위치 어긋남에 기초하여, 금회의 접합에 있어서의 상기 수평 방향 위치 조정을 제어하는 위치 조정 제어부를 구비하는, 접합 시스템을 제공한다.
Description
본 개시는 접합 시스템 및 접합 방법에 관한 것이다.
특허 문헌 1에 기재된 접합 장치는, 상측의 기판을 상방으로부터 흡착하는 상 척과, 하측의 기판을 하방으로부터 흡착하는 하 척을 구비하고, 2 매의 기판을 마주보게 한 다음 접합한다. 구체적으로, 접합 장치는, 먼저 상 척에 흡착되어 있는 기판의 중심부를 눌러, 하 척에 흡착되어 있는 기판의 중심부와 접촉시킨다. 이에 의해, 2 매의 기판의 중심부끼리가 분자간력 등에 의해 접합된다. 이어서, 접합 장치는, 2 매의 기판의 접합된 접합 영역을 중심부로부터 외주부로 확장한다.
접합 장치는, 상 척에 대하여 고정되는 상부 촬상부와, 하 척에 대하여 고정되는 하부 촬상부와, 상 척과 하 척을 상대적으로 이동시키는 이동부를 가진다. 상부 촬상부는 하 척에 흡착되어 있는 하측의 기판에 형성된 얼라이먼트 마크를 촬상한다. 한편, 하부 촬상부는 상 척에 흡착되어 있는 상측의 기판에 형성된 얼라이먼트 마크를 촬상한다.
접합 장치는, 상부 촬상부로 촬상한 화상 및 하부 촬상부로 촬상한 화상에 기초하여, 상측의 기판과 하측의 기판과의 상대적인 수평 방향 위치를 계측한다. 접합 장치는 연직 방향에서 봤을 때에 상측의 기판의 얼라이먼트 마크와 하측의 기판의 얼라이먼트 마크가 겹치도록 상 척과 하 척을 상대적으로 이동시킨 다음, 상측의 기판과 하측의 기판을 접합시킨다.
본 개시의 일태양은, 접합 전에 행해지는 상측의 기판과 하측의 기판과의 수평 방향 위치 조정의 정밀도를 향상시킬 수 있는 기술을 제공한다.
본 개시의 일태양의 접합 시스템은,
연직 방향으로 이간하여 배치되는 제 1 유지부 및 제 2 유지부를 구비하고, 상기 제 1 유지부는 제 1 기판을 흡착 유지하는 흡착면을 상기 제 2 유지부에 대향하는 면에 가지고, 상기 제 2 유지부는 제 2 기판을 흡착 유지하는 흡착면을 상기 제 1 유지부에 대향하는 면에 가지고,
상기 제 1 유지부와 상기 제 2 유지부를 상대적으로 이동시킴으로써, 상기 제 1 유지부에 유지되어 있는 상기 제 1 기판과, 상기 제 2 유지부에 유지되어 있는 상기 제 2 기판과의 수평 방향 위치 조정을 행하는 위치 조정부와,
상기 제 1 유지부에 유지되어 있는 상기 제 1 기판과, 상기 제 2 유지부에 유지되어 있는 상기 제 2 기판을 맞누르는 누름부와,
상기 누름부에 의해 접합된 상기 제 1 기판의 얼라이먼트 마크와 상기 제 2 기판의 얼라이먼트 마크와의 위치 어긋남을 측정하는 측정부와,
과거의 접합에 있어서 생긴 상기 위치 어긋남에 기초하여, 금회의 접합에 있어서의 상기 수평 방향 위치 조정을 제어하는 위치 조정 제어부를 구비한다.
본 개시의 일태양에 따르면, 접합 전에 행해지는 상측의 기판과 하측의 기판과의 수평 방향 위치 조정의 정밀도를 향상시킬 수 있다.
도 1은 일실시 형태에 따른 접합 시스템을 나타내는 평면도이다.
도 2는 일실시 형태에 따른 접합 시스템을 나타내는 측면도이다.
도 3은 일실시 형태에 따른 제 1 기판 및 제 2 기판의 접합 전의 상태를 나타내는 측면도이다.
도 4는 일실시 형태에 따른 접합 장치를 나타내는 평면도이다.
도 5는 일실시 형태에 따른 접합 장치를 나타내는 측면도이다.
도 6은 일실시 형태에 따른 상 척 및 하 척을 나타내는 단면도로, 상 웨이퍼와 하 웨이퍼의 위치 조정 후, 접합 전의 상태를 나타내는 단면도이다.
도 7은 일실시 형태에 따른 상 웨이퍼와 하 웨이퍼를 중심부로부터 외주부를 향해 서서히 접합하는 동작을 나타내는 단면도이다.
도 8은 일실시 형태에 따른 접합 시스템이 실행하는 처리의 일부를 나타내는 순서도이다.
도 9는 일실시 형태에 따른 상 웨이퍼와 하 웨이퍼와의 수평 방향 위치 조정의 동작을 나타내는 설명도이다.
도 10은 일실시 형태에 따른 얼라이먼트 측정 장치를 나타내는 단면도이다.
도 11은 일실시 형태에 따른 제어 장치의 구성 요소를 기능 블록으로 나타내는 도이다.
도 12는 일실시 형태에 따른 측정 데이터 해석부에 의한 처리를 나타내는 설명도이다.
도 13은 일실시 형태에 따른 얼라이먼트 측정 장치의 측정 데이터에 기초하여 접합 장치의 설정을 구하는 처리를 나타내는 순서도이다.
도 14는 일실시 형태에 따른 얼라이먼트 측정 장치의 측정 데이터에 기초하는 접합 장치의 동작 처리를 나타내는 순서도이다.
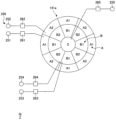
도 15는 일실시 형태에 따른 하 척의 흡착면을 나타내는 평면도이다.
도 16은 일실시 형태에 따른 상 척, 하 척 및 온도 분포 조절부를 나타내는 측면도이다.
도 17은 일실시 형태에 따른 온도 분포 조절부의 본체부를 나타내는 측면 단면도이다.
도 18은 변형예에 따른 하 척을 나타내는 측면 단면도이다.
도 2는 일실시 형태에 따른 접합 시스템을 나타내는 측면도이다.
도 3은 일실시 형태에 따른 제 1 기판 및 제 2 기판의 접합 전의 상태를 나타내는 측면도이다.
도 4는 일실시 형태에 따른 접합 장치를 나타내는 평면도이다.
도 5는 일실시 형태에 따른 접합 장치를 나타내는 측면도이다.
도 6은 일실시 형태에 따른 상 척 및 하 척을 나타내는 단면도로, 상 웨이퍼와 하 웨이퍼의 위치 조정 후, 접합 전의 상태를 나타내는 단면도이다.
도 7은 일실시 형태에 따른 상 웨이퍼와 하 웨이퍼를 중심부로부터 외주부를 향해 서서히 접합하는 동작을 나타내는 단면도이다.
도 8은 일실시 형태에 따른 접합 시스템이 실행하는 처리의 일부를 나타내는 순서도이다.
도 9는 일실시 형태에 따른 상 웨이퍼와 하 웨이퍼와의 수평 방향 위치 조정의 동작을 나타내는 설명도이다.
도 10은 일실시 형태에 따른 얼라이먼트 측정 장치를 나타내는 단면도이다.
도 11은 일실시 형태에 따른 제어 장치의 구성 요소를 기능 블록으로 나타내는 도이다.
도 12는 일실시 형태에 따른 측정 데이터 해석부에 의한 처리를 나타내는 설명도이다.
도 13은 일실시 형태에 따른 얼라이먼트 측정 장치의 측정 데이터에 기초하여 접합 장치의 설정을 구하는 처리를 나타내는 순서도이다.
도 14는 일실시 형태에 따른 얼라이먼트 측정 장치의 측정 데이터에 기초하는 접합 장치의 동작 처리를 나타내는 순서도이다.
도 15는 일실시 형태에 따른 하 척의 흡착면을 나타내는 평면도이다.
도 16은 일실시 형태에 따른 상 척, 하 척 및 온도 분포 조절부를 나타내는 측면도이다.
도 17은 일실시 형태에 따른 온도 분포 조절부의 본체부를 나타내는 측면 단면도이다.
도 18은 변형예에 따른 하 척을 나타내는 측면 단면도이다.
이하, 본 개시된 실시 형태에 대하여 도면을 참조하여 설명한다. 각 도면에서, 동일한 또는 대응하는 구성에는, 동일한 또는 대응하는 부호를 부여하여 설명을 생략한다. 이하의 설명에 있어서, X축 방향, Y축 방향, Z축 방향은 서로 수직인 방향이며, X축 방향 및 Y축 방향은 수평 방향, Z축 방향은 연직 방향이다. 연직축을 회전 중심으로 하는 회전 방향을 θ 방향이라고도 부른다. 본 명세서에 있어서, 하방이란 연직 하방을 의미하고, 상방이란 연직 상방을 의미한다.
<접합 시스템>
도 1은 일실시 형태에 따른 접합 시스템을 나타내는 평면도이다. 도 2는 일실시 형태에 따른 접합 시스템을 나타내는 측면도이다. 도 3은 일실시 형태에 따른 제 1 기판 및 제 2 기판의 접합 전의 상태를 나타내는 측면도이다. 도 1에 나타내는 접합 시스템(1)은, 제 1 기판(W1)과 제 2 기판(W2)을 접합함으로써 중합 기판(T)(도 7의 (b) 참조)을 형성한다.
제 1 기판(W1)은, 예를 들면 실리콘 웨이퍼 또는 화합물 반도체 웨이퍼 등의 반도체 기판에 복수의 전자 회로가 형성된 기판이다. 또한 제 2 기판(W2)은, 예를 들면 전자 회로가 형성되어 있지 않은 베어 웨이퍼이다. 제 1 기판(W1)과 제 2 기판(W2)은 대략 동일 직경을 가진다. 또한, 제 2 기판(W2)에 전자 회로가 형성되어 있어도 된다.
이하에서는, 제 1 기판(W1)을 '상 웨이퍼(W1)'라 기재하고, 제 2 기판(W2)을 '하 웨이퍼(W2)', 중합 기판(T)을 '중합 웨이퍼(T)'라 기재하는 경우가 있다. 또한 이하에서는, 도 3에 나타내는 바와 같이, 상 웨이퍼(W1)의 판면 중, 하 웨이퍼(W2)와 접합되는 측의 판면을 '접합면(W1j)'이라 기재하고, 접합면(W1j)과는 반대측의 판면을 '비접합면(W1n)'이라 기재한다. 또한, 하 웨이퍼(W2)의 판면 중, 상 웨이퍼(W1)와 접합되는 측의 판면을 '접합면(W2j)'이라 기재하고, 접합면(W2j)과는 반대측의 판면을 '비접합면(W2n)'이라 기재한다.
도 1에 나타내는 바와 같이, 접합 시스템(1)은, 반입반출 스테이션(2)과, 처리 스테이션(3)을 구비한다. 반입반출 스테이션(2) 및 처리 스테이션(3)은 X축 정방향을 따라, 반입반출 스테이션(2) 및 처리 스테이션(3)의 순서로 배열되어 배치된다. 또한, 반입반출 스테이션(2) 및 처리 스테이션(3)은 일체적으로 접속된다.
반입반출 스테이션(2)은 배치대(10)와, 반송 영역(20)을 구비한다. 배치대(10)는 복수의 배치판(11)을 구비한다. 각 배치판(11)에는 복수 매(예를 들면, 25 매)의 기판을 수평 상태로 수용하는 카세트(C1, C2, C3)가 각각 배치된다. 예를 들면, 카세트(C1)는 상 웨이퍼(W1)를 수용하는 카세트이며, 카세트(C2)는 하 웨이퍼(W2)를 수용하는 카세트이며, 카세트(C3)는 중합 웨이퍼(T)를 수용하는 카세트이다.
반송 영역(20)은 배치대(10)의 X축 정방향측에 인접하여 배치된다. 이러한 반송 영역(20)에는, Y축 방향으로 연장되는 반송로(21)와, 이 반송로(21)를 따라 이동 가능한 반송 장치(22)가 마련된다. 반송 장치(22)는 Y축 방향뿐 아니라, X축 방향으로도 이동 가능 또한 Z축 둘레로 선회 가능하며, 배치판(11)에 배치된 카세트(C1 ~ C3)와, 후술하는 처리 스테이션(3)의 제 3 처리 블록(G3) 및 제 4 처리 블록(G4)의 사이에서, 상 웨이퍼(W1), 하 웨이퍼(W2) 및 중합 웨이퍼(T)의 반송을 행한다.
또한, 배치판(11)에 배치되는 카세트(C1 ~ C3)의 개수는, 도시한 것에 한정되지 않는다. 또한, 배치판(11)에는 카세트(C1, C2, C3) 이외에, 문제가 생긴 기판을 회수하기 위한 카세트 등이 배치되어도 된다.
처리 스테이션(3)에는 각종 장치를 구비한 복수의 처리 블록, 예를 들면 4 개의 처리 블록(G1, G2, G3, G4)이 마련된다. 예를 들면 처리 스테이션(3)의 정면측(도 1의 Y축 부방향측)에는 제 1 처리 블록(G1)이 마련되고, 처리 스테이션(3)의 배면측(도 1의 Y축 정방향측)에는 제 2 처리 블록(G2)이 마련된다. 또한, 처리 스테이션(3)의 반입반출 스테이션(2)측(도 1의 X축 부방향측)에는 제 3 처리 블록(G3)이 마련된다. 처리 스테이션(3)의 반입반출 스테이션(2)과는 반대측(도 1의 X축 정방향측)에는 제 4 처리 블록(G4)이 마련된다.
제 1 처리 블록(G1)에는 상 웨이퍼(W1) 및 하 웨이퍼(W2)의 접합면(W1j, W2j)을 개질하는 표면 개질 장치(30)가 배치된다. 표면 개질 장치(30)는 상 웨이퍼(W1) 및 하 웨이퍼(W2)의 접합면(W1j, W2j)에 있어서의 SiO2의 결합을 절단하여 단결합의 SiO로 함으로써, 그 후 친수화되기 쉽게 하도록 당해 접합면(W1j, W2j)을 개질한다.
또한 표면 개질 장치(30)에서는, 예를 들면 감압 분위기 하에서 처리 가스인 산소 가스 또는 질소 가스가 여기되어 플라즈마화되고, 이온화된다. 그리고, 이러한 산소 이온 또는 질소 이온이, 상 웨이퍼(W1) 및 하 웨이퍼(W2)의 접합면(W1j, W2j)에 조사됨으로써, 접합면(W1j, W2j)이 플라즈마 처리되어 개질된다.
제 2 처리 블록(G2)에는 표면 친수화 장치(40)와, 접합 장치(41)가 배치된다. 표면 친수화 장치(40)는, 예를 들면 순수에 의해 상 웨이퍼(W1) 및 하 웨이퍼(W2)의 접합면(W1j, W2j)을 친수화하고, 또한 접합면(W1j, W2j)을 세정한다. 표면 친수화 장치(40)에서는, 예를 들면 스핀 척에 유지된 상 웨이퍼(W1) 또는 하 웨이퍼(W2)를 회전시키면서, 당해 상 웨이퍼(W1) 또는 하 웨이퍼(W2) 상에 순수를 공급한다. 이에 의해, 상 웨이퍼(W1) 또는 하 웨이퍼(W2) 상에 공급된 순수가 상 웨이퍼(W1) 또는 하 웨이퍼(W2)의 접합면(W1j, W2j) 상을 확산되어, 접합면(W1j, W2j)이 친수화된다.
접합 장치(41)는, 친수화된 상 웨이퍼(W1)와 하 웨이퍼(W2)를 분자간력에 의해 접합한다. 이러한 접합 장치(41)의 구성에 대해서는 후술한다.
제 3 처리 블록(G3)에는, 도 2에 나타내는 바와 같이 상 웨이퍼(W1), 하 웨이퍼(W2) 및 중합 웨이퍼(T)의 트랜지션(TRS) 장치(50, 51)가 아래로부터 차례로 2 단으로 마련된다.
제 4 처리 블록(G4)에는 얼라이먼트 측정 장치(55)가 배치된다. 얼라이먼트 측정 장치(55)는 접합 장치(41)에 의해 접합된 상 웨이퍼(W1)와 하 웨이퍼(W2)와의 상대적인 위치 어긋남을 측정한다. 얼라이먼트 측정 장치(55)는 측정 데이터를 후술의 제어 장치(70)로 송신한다.
또한, 얼라이먼트 측정 장치(55)는 측정 데이터를 제어 장치(70)로 송신할 수 있으면 되며, 처리 스테이션(3)의 외부에 배치되어도 된다. 예를 들면, 중합 웨이퍼(T)는 처리 스테이션(3)으로부터 반입반출 스테이션(2)을 경유하여 외부로 반출된 후, 얼라이먼트 측정 장치(55)에 의한 측정을 받아도 된다.
또한 도 1에 나타내는 바와 같이, 제 1 처리 블록(G1), 제 2 처리 블록(G2), 제 3 처리 블록(G3) 및 제 4 처리 블록(G4)으로 둘러싸인 영역에는 반송 영역(60)이 형성된다. 반송 영역(60)에는 반송 장치(61)가 배치된다. 반송 장치(61)는 예를 들면 연직 방향, 수평 방향 및 연직축 둘레로 이동 가능한 반송 암을 가진다. 이러한 반송 장치(61)는 반송 영역(60) 내를 이동하여, 반송 영역(60)에 인접하는 제 1 처리 블록(G1), 제 2 처리 블록(G2), 제 3 처리 블록(G3) 및 제 4 처리 블록(G4) 내의 정해진 장치로 상 웨이퍼(W1), 하 웨이퍼(W2) 및 중합 웨이퍼(T)를 반송한다.
또한 도 1에 나타내는 바와 같이, 접합 시스템(1)은 제어 장치(70)를 구비한다. 제어 장치(70)는 접합 시스템(1)의 동작을 제어한다. 제어 장치(70)는 예를 들면 컴퓨터로 구성되고, 도 1에 나타내는 바와 같이 CPU(Central Processing Unit)(71)와, 메모리 등의 기억 매체(72)와, 입력 인터페이스(73)와, 출력 인터페이스(74)를 가진다. 제어 장치(70)는, 기억 매체(72)에 기억된 프로그램을 CPU(71)에 실행시킴으로써, 각종의 제어를 행한다. 또한 제어 장치(70)는, 입력 인터페이스(73)에서 외부로부터의 신호를 수신하고, 출력 인터페이스(74)에서 외부로 신호를 송신한다.
제어 장치(70)의 프로그램은 정보 기억 매체에 기억되어, 정보 기억 매체로부터 인스톨된다. 정보 기억 매체로서는, 예를 들면 하드 디스크(HD), 플렉시블 디스크(FD), 콤팩트 디스크(CD), 마그넷 옵티컬 디스크(MO), 메모리 카드 등을 들 수 있다. 또한, 프로그램은 인터넷을 개재하여 서버로부터 다운로드되어, 인스톨되어도 된다.
<접합 장치>
도 4는 일실시 형태에 따른 접합 장치를 나타내는 평면도이다. 도 5는 일실시 형태에 따른 접합 장치를 나타내는 측면도이다.
도 4에 나타내는 바와 같이, 접합 장치(41)는 내부를 밀폐 가능한 처리 용기(100)를 가진다. 처리 용기(100)의 반송 영역(60)측의 측면에는, 상 웨이퍼(W1), 하 웨이퍼(W2) 및 중합 웨이퍼(T)의 반입반출구(101)가 형성되고, 당해 반입반출구(101)에는 개폐 셔터(102)가 마련되어 있다.
처리 용기(100)의 내부는 내벽(103)에 의해 반송 영역(T1)과 처리 영역(T2)으로 구획된다. 상술한 반입반출구(101)는 반송 영역(T1)에 있어서의 처리 용기(100)의 측면에 형성된다. 또한, 내벽(103)에도 상 웨이퍼(W1), 하 웨이퍼(W2) 및 중합 웨이퍼(T)의 반입반출구(104)가 형성된다.
반송 영역(T1)에는 트랜지션(110), 웨이퍼 반송 기구(111), 반전 기구(130) 및 위치 조절 기구(120)가, 예를 들면 반입반출구(101)측으로부터 이 순서로 나란히 배치된다.
트랜지션(110)은 상 웨이퍼(W1), 하 웨이퍼(W2) 및 중합 웨이퍼(T)를 일시적으로 배치한다. 트랜지션(110)은 예를 들면 2 단으로 형성되고, 상 웨이퍼(W1), 하 웨이퍼(W2) 및 중합 웨이퍼(T) 중 어느 2 개를 동시에 배치할 수 있다.
웨이퍼 반송 기구(111)는, 도 4 및 도 5에 나타내는 바와 같이, 예를 들면 연직 방향(Z축 방향), 수평 방향(Y축 방향, X축 방향) 및 연직축 둘레로 이동 가능한 반송 암을 가진다. 웨이퍼 반송 기구(111)는 반송 영역(T1) 내, 또는 반송 영역(T1)과 처리 영역(T2)과의 사이에서 상 웨이퍼(W1), 하 웨이퍼(W2) 및 중합 웨이퍼(T)를 반송하는 것이 가능하다.
위치 조절 기구(120)는 상 웨이퍼(W1) 및 하 웨이퍼(W2)의 수평 방향의 방향을 조절한다. 구체적으로, 위치 조절 기구(120)는 상 웨이퍼(W1) 및 하 웨이퍼(W2)를 유지하여 회전시키는 도시하지 않은 유지부를 구비한 기대(121)와, 상 웨이퍼(W1) 및 하 웨이퍼(W2)의 노치부의 위치를 검출하는 검출부(122)를 가진다. 위치 조절 기구(120)는 기대(121)에 유지된 상 웨이퍼(W1) 및 하 웨이퍼(W2)를 회전시키면서 검출부(122)를 이용하여 상 웨이퍼(W1) 및 하 웨이퍼(W2)의 노치부의 위치를 검출함으로써, 노치부의 위치를 조절한다. 이에 의해, 상 웨이퍼(W1) 및 하 웨이퍼(W2)의 수평 방향의 방향이 조절된다.
반전 기구(130)는 상 웨이퍼(W1)의 표리면을 반전시킨다. 구체적으로, 반전 기구(130)는 상 웨이퍼(W1)를 유지하는 유지 암(131)을 가진다. 유지 암(131)은 수평 방향(X축 방향)으로 연신한다. 또한 유지 암(131)에는, 상 웨이퍼(W1)를 유지하는 유지 부재(132)가 예를 들면 4 개소에 마련되어 있다.
유지 암(131)은 예를 들면 모터 등을 구비한 구동부(133)에 지지된다. 유지 암(131)은 이러한 구동부(133)에 의해 수평축 둘레로 회동 가능하다. 또한, 유지 암(131)은 구동부(133)를 중심으로 회동 가능하고, 또한 수평 방향(X축 방향)으로 이동 가능하다. 구동부(133)의 하방에는, 예를 들면 모터 등을 구비한 다른 구동부(도시하지 않음)가 마련된다. 이 다른 구동부에 의해, 구동부(133)는 연직 방향으로 연신하는 지지 기둥(134)을 따라 연직 방향으로 이동할 수 있다.
이와 같이, 유지 부재(132)에 유지된 상 웨이퍼(W1)는, 구동부(133)에 의해 수평축 둘레로 회동할 수 있고 또한 연직 방향 및 수평 방향으로 이동할 수 있다. 또한, 유지 부재(132)에 유지된 상 웨이퍼(W1)는, 구동부(133)를 중심으로 회동하여, 위치 조절 기구(120)와 후술하는 상 척(140)과의 사이를 이동할 수 있다.
처리 영역(T2)에는, 상 웨이퍼(W1)의 상면(비접합면(W1n))을 상방으로부터 흡착 유지하는 상 척(140)과, 하 웨이퍼(W2)를 배치하여 하 웨이퍼(W2)의 하면(비접합면(W2n))을 하방으로부터 흡착 유지하는 하 척(141)이 마련된다. 하 척(141)은 상 척(140)의 하방에 마련되고, 상 척(140)과 대향 배치 가능하게 구성된다. 상 척(140)과 하 척(141)은 연직 방향으로 이간하여 배치된다.
도 5에 나타내는 바와 같이, 상 척(140)은 상 척(140)의 상방에 마련된 상 척 유지부(150)에 유지된다. 상 척 유지부(150)는 처리 용기(100)의 천장면에 마련된다. 상 척(140)은 상 척 유지부(150)를 개재하여 처리 용기(100)에 고정된다.
상 척 유지부(150)에는, 하 척(141)에 유지된 하 웨이퍼(W2)의 상면(접합면(W2j))을 촬상하는 상부 촬상부(151)가 마련되어 있다. 상부 촬상부(151)에는 예를 들면 CCD 카메라가 이용된다.
하 척(141)은 하 척(141)의 하방에 마련된 제 1 하 척 이동부(160)에 지지된다. 제 1 하 척 이동부(160)는, 후술하는 바와 같이 하 척(141)을 수평 방향(X축 방향)으로 이동시킨다. 또한, 제 1 하 척 이동부(160)는 하 척(141)을 연직 방향으로 이동 가능, 또한 연직축 둘레로 회전 가능하게 구성된다.
제 1 하 척 이동부(160)에는, 상 척(140)에 유지된 상 웨이퍼(W1)의 하면(접합면(W1j))을 촬상하는 하부 촬상부(161)가 마련되어 있다(도 5 참조). 하부 촬상부(161)에는 예를 들면 CCD 카메라가 이용된다.
제 1 하 척 이동부(160)는 제 1 하 척 이동부(160)의 하면측에 마련되고, 수평 방향(X축 방향)으로 연신하는 한 쌍의 레일(162, 162)에 장착되어 있다. 제 1 하 척 이동부(160)는 레일(162)을 따라 이동 가능하게 구성되어 있다.
한 쌍의 레일(162, 162)은 제 2 하 척 이동부(163)에 배치되어 있다. 제 2 하 척 이동부(163)는 당해 제 2 하 척 이동부(163)의 하면측에 마련되고, 수평 방향(Y축 방향)으로 연신하는 한 쌍의 레일(164, 164)에 장착되어 있다. 그리고, 제 2 하 척 이동부(163)는 레일(164)을 따라 수평 방향(Y축 방향)으로 이동 가능하게 구성된다. 또한, 한 쌍의 레일(164, 164)은 처리 용기(100)의 저면에 마련된 배치대(165) 상에 배치되어 있다.
제 1 하 척 이동부(160) 및 제 2 하 척 이동부(163) 등에 의해, 위치 조정부(166)가 구성된다. 위치 조정부(166)는, 하 척(141)을 X축 방향, Y축 방향 및 θ 방향으로 이동시킴으로써, 상 척(140)에 유지되어 있는 상 웨이퍼(W1)와, 하 척(141)에 유지되어 있는 하 웨이퍼(W2)와의 수평 방향 위치 조정을 행한다. 또한, 위치 조정부(166)는 하 척(141)을 Z축 방향으로 이동시킴으로써, 상 척(140)에 유지되어 있는 상 웨이퍼(W1)와, 하 척(141)에 유지되어 있는 하 웨이퍼(W2)와의 연직 방향 위치 조정을 행한다.
또한, 본 실시 형태의 위치 조정부(166)는 하 척(141)을 X축 방향, Y축 방향 및 θ 방향으로 이동시킴으로써, 상 웨이퍼(W1)와 하 웨이퍼(W2)와의 수평 방향 위치 조정을 행하지만, 본 개시의 기술은 이에 한정되지 않는다. 위치 조정부(166)는, 상 척(140)과 하 척(141)을 상대적으로 X축 방향, Y축 방향 및 θ 방향으로 이동시킬 수 있으면 된다. 예를 들면, 위치 조정부(166)는 하 척(141)을 X축 방향 및 Y축 방향으로 이동시키고, 또한 상 척(140)을 θ 방향으로 이동시킴으로써, 상 웨이퍼(W1)와 하 웨이퍼(W2)와의 수평 방향 위치 조정을 행해도 된다.
또한, 본 실시 형태의 위치 조정부(166)는 하 척(141)을 Z축 방향으로 이동시킴으로써, 상 웨이퍼(W1)와 하 웨이퍼(W2)와의 연직 방향 위치 조정을 행하지만, 본 개시의 기술은 이에 한정되지 않는다. 위치 조정부(166)는 상 척(140)과 하 척(141)을 상대적으로 Z축 방향으로 이동할 수 있으면 된다. 예를 들면, 위치 조정부(166)는 상 척(140)을 Z축 방향으로 이동시킴으로써, 상 웨이퍼(W1)와 하 웨이퍼(W2)와의 연직 방향 위치 조정을 행해도 된다.
도 6은 일실시 형태에 따른 상 척 및 하 척을 나타내는 단면도로서, 상 웨이퍼와 하 웨이퍼의 접합 직전의 상태를 나타내는 단면도이다. 도 7의 (a)는 일실시 형태에 따른 상 웨이퍼와 하 웨이퍼와의 접합 도중의 상태를 나타내는 단면도이다. 도 7의 (b)는 일실시 형태에 따른 상 웨이퍼와 하 웨이퍼와의 접합 완료 시의 상태를 나타내는 단면도이다. 도 6, 도 7의 (a) 및 도 7의 (b)에 있어서 실선으로 나타내는 화살표는 진공 펌프에 의한 공기의 흡인 방향을 나타낸다.
상 척(140) 및 하 척(141)은 예를 들면 진공 척이다. 본 실시 형태에서는, 상 척(140)이 특허 청구의 범위에 기재된 제 1 유지부에 대응하고, 하 척(141)이 특허 청구의 범위에 기재된 제 2 유지부에 대응한다. 상 척(140)은 상 웨이퍼(W1)를 흡착하는 흡착면(140a)을, 하 척(141)에 대향하는 면(하면)에 가진다. 한편, 하 척(141)은 하 웨이퍼(W2)를 흡착하는 흡착면(141a)을, 상 척(140)에 대향하는 면(상면)에 가진다.
상 척(140)은 척 베이스(170)를 가진다. 척 베이스(170)는 상 웨이퍼(W1)와 동일 직경 혹은 상 웨이퍼(W1)보다 큰 직경을 가진다. 척 베이스(170)는 지지 부재(180)에 의해 지지된다. 지지 부재(180)는 평면으로 봤을 때 적어도 척 베이스(170)를 덮도록 마련되고, 척 베이스(170)에 대하여 예를 들면 나사 고정에 의해 고정되어 있다. 지지 부재(180)는 처리 용기(100)의 천장면에 마련된 복수의 지지 기둥(181)(도 5 참조)에 지지된다. 지지 부재(180) 및 복수의 지지 기둥(181)으로 상 척 유지부(150)가 구성된다.
지지 부재(180) 및 척 베이스(170)에는 지지 부재(180) 및 척 베이스(170)를 연직 방향으로 관통하는 관통홀(176)이 형성된다. 관통홀(176)의 위치는 상 척(140)에 흡착 유지되는 상 웨이퍼(W1)의 중심부에 대응하고 있다. 이러한 관통홀(176)에는 스트라이커(190)의 누름 핀(191)이 삽입 관통된다.
스트라이커(190)는 지지 부재(180)의 상면에 배치되고, 누름 핀(191)과, 액츄에이터부(192)와, 직동 기구(193)를 구비한다. 누름 핀(191)은 연직 방향을 따라 연장되는 원주(圓柱) 형상의 부재이며, 액츄에이터부(192)에 의해 지지된다.
액츄에이터부(192)는, 예를 들면 전공 레귤레이터(도시하지 않음)로부터 공급되는 공기에 의해 일정 방향(여기서는 연직 하방)으로 일정한 압력을 발생시킨다. 액츄에이터부(192)는 전공 레귤레이터로부터 공급되는 공기에 의해, 상 웨이퍼(W1)의 중심부와 접촉하여 당해 상 웨이퍼(W1)의 중심부에 걸리는 누름 하중을 제어할 수 있다. 또한, 누름 핀(191)의 선단부는, 전공 레귤레이터로부터의 공기에 의해, 관통홀(176)을 삽입 관통하여 연직 방향으로 승강 가능하게 되어 있다.
액츄에이터부(192)는 직동 기구(193)에 지지된다. 직동 기구(193)는 예를 들면 모터를 내장한 구동부에 의해 액츄에이터부(192)를 연직 방향으로 이동시킨다.
스트라이커(190)는 이상과 같이 구성되어 있고, 직동 기구(193)에 의해 액츄에이터부(192)의 이동을 제어하고, 액츄에이터부(192)에 의해 누름 핀(191)에 의한 상 웨이퍼(W1)의 누름 하중을 제어한다.
스트라이커(190)는, 상 척(140)에 흡착 유지되어 있는 상 웨이퍼(W1)와, 하 척(141)에 흡착 유지되어 있는 하 웨이퍼(W2)를 눌러 맞춘다. 구체적으로, 스트라이커(190)는 상 척(140)에 흡착 유지되어 있는 상 웨이퍼(W1)를 변형시킴으로써, 하 웨이퍼(W2)에 눌러 맞춘다. 스트라이커(190)가, 특허 청구의 범위에 기재된 누름부에 상당한다.
척 베이스(170)의 하면에는 상 웨이퍼(W1)의 비접합면(W1n)에 접촉하는 복수의 핀(171)이 마련되어 있다. 척 베이스(170), 복수의 핀(171) 등으로 상 척(140)이 구성된다. 상 척(140)의 상 웨이퍼(W1)를 흡착 유지하는 흡착면(140a)은 직경 방향에 복수의 영역으로 구획되고, 구획된 영역마다 흡착 압력의 발생과 흡착 압력의 해제가 이루어진다.
또한, 하 척(141)은 상 척(140)과 마찬가지로 구성되어도 된다. 하 척(141)은 하 웨이퍼(W2)의 비접합면(W2n)에 접촉하는 복수의 핀을 가진다. 하 척(141)의 하 웨이퍼(W2)를 흡착 유지하는 흡착면(141a)은 직경 방향에 복수의 영역으로 구획되고, 구획된 영역마다 흡착 압력의 발생과 흡착 압력의 해제가 이루어진다.
<접합 방법>
도 8은 일실시 형태에 따른 접합 시스템이 실행하는 처리의 일부를 나타내는 순서도이다. 또한, 도 8에 나타내는 각종 처리는 제어 장치(70)에 의한 제어 하에서 실행된다.
먼저, 복수 매의 상 웨이퍼(W1)를 수용한 카세트(C1), 복수 매의 하 웨이퍼(W2)를 수용한 카세트(C2), 및 빈 카세트(C3)가, 반입반출 스테이션(2)의 정해진 배치판(11)에 배치된다. 이 후, 반송 장치(22)에 의해 카세트(C1) 내의 상 웨이퍼(W1)가 취출되고, 처리 스테이션(3)의 제 3 처리 블록(G3)의 트랜지션 장치(50)로 반송된다.
이어서, 상 웨이퍼(W1)는 반송 장치(61)에 의해 제 1 처리 블록(G1)의 표면 개질 장치(30)로 반송된다. 표면 개질 장치(30)에서는, 정해진 감압 분위기 하에 있어서, 처리 가스인 산소 가스가 여기되어 플라즈마화되고, 이온화된다. 이 산소 이온이 상 웨이퍼(W1)의 접합면(W1j)에 조사되어, 당해 접합면(W1j)이 플라즈마 처리된다. 이에 의해, 상 웨이퍼(W1)의 접합면(W1j)이 개질된다(단계(S101)).
이어서, 상 웨이퍼(W1)는, 반송 장치(61)에 의해 제 2 처리 블록(G2)의 표면 친수화 장치(40)로 반송된다. 표면 친수화 장치(40)에서는, 스핀 척에 유지된 상 웨이퍼(W1)를 회전시키면서, 당해 상 웨이퍼(W1) 상에 순수를 공급한다. 그러면, 공급된 순수는 상 웨이퍼(W1)의 접합면(W1j) 상을 확산되고, 표면 개질 장치(30)에 있어서 개질된 상 웨이퍼(W1)의 접합면(W1j)에 수산기(실라놀기)가 부착하여 당해 접합면(W1j)이 친수화된다(단계(S102)). 또한, 접합면(W1j)의 친수화에 이용하는 순수에 의해, 상 웨이퍼(W1)의 접합면(W1j)이 세정된다.
이어서, 상 웨이퍼(W1)는 반송 장치(61)에 의해 제 2 처리 블록(G2)의 접합 장치(41)로 반송된다. 접합 장치(41)로 반입된 상 웨이퍼(W1)는, 트랜지션(110)을 개재하여 웨이퍼 반송 기구(111)에 의해 위치 조절 기구(120)로 반송된다. 그리고 위치 조절 기구(120)에 의해, 상 웨이퍼(W1)의 수평 방향의 방향이 조절된다(단계(S103)).
이 후, 위치 조절 기구(120)로부터 반전 기구(130)의 유지 암(131)에 상 웨이퍼(W1)가 전달된다. 이어서 반송 영역(T1)에 있어서, 유지 암(131)을 반전시킴으로써, 상 웨이퍼(W1)의 표리면이 반전된다(단계(S104)). 즉, 상 웨이퍼(W1)의 접합면(W1j)이 하방을 향해진다.
이 후, 반전 기구(130)의 유지 암(131)이 회동하여 상 척(140)의 하방으로 이동한다. 그리고, 반전 기구(130)로부터 상 척(140)으로 상 웨이퍼(W1)가 전달된다. 상 웨이퍼(W1)는 노치부를 미리 결정된 방향을 향한 상태로, 상 척(140)에 그 비접합면(W1n)이 흡착 유지된다(단계(S105)).
상 웨이퍼(W1)에 상술한 단계(S101 ~ S105)의 처리가 행해지고 있는 동안, 하 웨이퍼(W2)의 처리가 행해진다. 먼저, 반송 장치(22)에 의해 카세트(C2) 내의 하 웨이퍼(W2)가 취출되고, 처리 스테이션(3)의 트랜지션 장치(50)로 반송된다.
이어서, 하 웨이퍼(W2)는, 반송 장치(61)에 의해 표면 개질 장치(30)로 반송되고, 하 웨이퍼(W2)의 접합면(W2j)이 개질된다(단계(S106)). 또한, 단계(S106)에 있어서의 하 웨이퍼(W2)의 접합면(W2j)의 개질은, 상술한 단계(S101)와 동일하다.
이 후, 하 웨이퍼(W2)는, 반송 장치(61)에 의해 표면 친수화 장치(40)로 반송되고, 하 웨이퍼(W2)의 접합면(W2j)이 친수화된다(단계(S107)). 또한, 접합면(W2j)의 친수화에 이용하는 순수에 의해, 접합면(W2j)이 세정된다. 또한, 단계(S107)에 있어서의 하 웨이퍼(W2)의 접합면(W2j)의 친수화는, 상기 단계(S102)에 있어서의 상 웨이퍼(W1)의 접합면(W1j)의 친수화와 동일하다.
이 후, 하 웨이퍼(W2)는 반송 장치(61)에 의해 접합 장치(41)로 반송된다. 접합 장치(41)로 반입된 하 웨이퍼(W2)는, 트랜지션(110)을 개재하여 웨이퍼 반송 기구(111)에 의해 위치 조절 기구(120)로 반송된다. 그리고 위치 조절 기구(120)에 의해, 하 웨이퍼(W2)의 수평 방향의 방향이 조절된다(단계(S108)).
이 후, 하 웨이퍼(W2)는 웨이퍼 반송 기구(111)에 의해 하 척(141)으로 반송되어, 하 척(141)에 흡착 유지된다(단계(S109)). 하 웨이퍼(W2)는 노치부를 미리 정해진 방향, 즉, 상 웨이퍼(W1)의 노치부와 동일한 방향을 향한 상태로, 하 척(141)에 그 비접합면(W2n)이 흡착 유지된다.
이어서, 상 척(140)에 유지된 상 웨이퍼(W1)와 하 척(141)에 유지된 하 웨이퍼(W2)와의 수평 방향의 위치 조절이 행해진다(단계(S110)). 이 위치 조정에는, 상 웨이퍼(W1)의 접합면(W1j)에 미리 형성된 얼라이먼트 마크(W1a, W1b, W1c)(도 9 참조) 및 하 웨이퍼(W2)의 접합면(W2j)에 미리 형성된 얼라이먼트 마크(W2a, W2b, W2c)(도 9 참조)가 이용된다.
상 웨이퍼(W1)와 하 웨이퍼(W2)와의 수평 방향 위치 조정의 동작에 대하여 도 9를 참조하여 설명한다. 도 9의 (a)는 일실시 형태에 따른 상부 촬상부와 하부 촬상부와의 위치 조정 동작을 설명하는 도이다. 도 9의 (b)는 일실시 형태에 따른 상부 촬상부에 의한 하 웨이퍼의 촬상 동작 및 하부 촬상부에 의한 상 웨이퍼의 촬상 동작을 설명하는 도이다. 도 9의 (c)는 일실시 형태에 따른 상 웨이퍼와 하 웨이퍼와의 위치 조정 동작을 설명하는 도이다.
먼저 도 9의 (a)에 나타내는 바와 같이, 상부 촬상부(151) 및 하부 촬상부(161)의 수평 방향 위치의 조절을 행한다. 구체적으로, 하부 촬상부(161)가 상부 촬상부(151)의 대략 하방에 위치하도록, 위치 조정부(166)에 의해 하 척(141)을 수평 방향으로 이동시킨다. 그리고, 상부 촬상부(151)와 하부 촬상부(161)에서 공통의 타겟(149)을 확인하고, 상부 촬상부(151)와 하부 촬상부(161)의 수평 방향 위치가 일치하도록, 하부 촬상부(161)의 수평 방향 위치가 미세 조절된다.
이어서 도 9의 (b)에 나타내는 바와 같이, 위치 조정부(166)에 의해 하 척(141)을 연직 상방으로 이동시킨다. 이 후, 위치 조정부(166)에 의해 하 척(141)을 수평 방향으로 이동시키면서, 상부 촬상부(151)를 이용하여 하 웨이퍼(W2)의 접합면(W2j)의 얼라이먼트 마크(W2c, W2b, W2a)를 순차 촬상한다. 동시에, 하 척(141)을 수평 방향으로 이동시키면서, 하부 촬상부(161)를 이용하여 상 웨이퍼(W1)의 접합면(W1j)의 얼라이먼트 마크(W1a, W1b, W1c)를 순차 촬상한다. 또한, 도 9의 (b)는 상부 촬상부(151)에 의해 하 웨이퍼(W2)의 얼라이먼트 마크(W2c)를 촬상하고, 또한 하부 촬상부(161)에 의해 상 웨이퍼(W1)의 얼라이먼트 마크(W1a)를 촬상하는 모습을 나타내고 있다.
촬상된 화상 데이터는 제어 장치(70)에 출력된다. 제어 장치(70)는 상부 촬상부(151)로 촬상된 화상 데이터와 하부 촬상부(161)로 촬상된 화상 데이터에 기초하여, 위치 조정부(166)에 의해 하 척(141)의 수평 방향 위치를 조절시킨다. 이 수평 방향 위치 조정은, 연직 방향에서 봤을 때 상 웨이퍼(W1)의 얼라이먼트 마크(W1a, W1b, W1c)와 하 웨이퍼(W2)의 얼라이먼트 마크(W2a, W2b, W2c)가 겹치도록 행해진다. 이렇게 하여, 상 척(140)과 하 척(141)의 수평 방향 위치가 조절되고, 상 웨이퍼(W1)와 하 웨이퍼(W2)의 수평 방향 위치(예를 들면 X축 방향 위치, Y축 방향 위치 및 θ 방향 위치를 포함함)가 조절된다.
이어서, 도 9의 (c)에 실선으로 나타내는 바와 같이 상 척(140)에 유지된 상 웨이퍼(W1)와 하 척(141)에 유지된 하 웨이퍼(W2)와의 연직 방향 위치의 조절을 행한다(단계(S111)). 구체적으로, 위치 조정부(166)가 하 척(141)을 연직 상방으로 이동시킴으로써, 하 웨이퍼(W2)를 상 웨이퍼(W1)에 접근시킨다. 이에 의해, 도 6에 나타내는 바와 같이, 하 웨이퍼(W2)의 접합면(W2j)과 상 웨이퍼(W1)의 접합면(W1j)과의 간격(S)은 정해진 거리, 예를 들면 50 μm ~ 200 μm로 조정된다.
이어서, 상 척(140)에 의한 상 웨이퍼(W1)의 중앙부의 흡착 유지를 해제한 후(단계(S112)), 도 7의 (a)에 나타내는 바와 같이, 스트라이커(190)의 누름 핀(191)을 하강시킴으로써, 상 웨이퍼(W1)의 중심부를 눌러 내린다(단계(S113)). 상 웨이퍼(W1)의 중심부가 하 웨이퍼(W2)의 중심부에 접촉하고, 상 웨이퍼(W1)의 중심부와 하 웨이퍼(W2)의 중심부가 정해진 힘으로 눌리면, 눌린 상 웨이퍼(W1)의 중심부와 하 웨이퍼(W2)의 중심부와의 사이에 접합이 개시된다. 이 후, 상 웨이퍼(W1)와 하 웨이퍼(W2)를 중심부로부터 외주부를 향해 서서히 접합하는 본딩 웨이브가 발생한다.
여기서, 상 웨이퍼(W1)의 접합면(W1j)과 하 웨이퍼(W2)의 접합면(W2j)은 각각 단계(S101, S106)에서 개질되고 있기 때문에, 먼저, 접합면(W1j, W2j) 간에 반데르발스력(분자간력)이 생겨, 당해 접합면(W1j, W2j)끼리가 접합된다. 또한, 상 웨이퍼(W1)의 접합면(W1j)과 하 웨이퍼(W2)의 접합면(W2j)은 각각 단계(S102, S107)에서 친수화되고 있기 때문에, 접합면(W1j, W2j) 간의 친수기가 수소 결합하여, 접합면(W1j, W2j)끼리가 강고하게 접합된다.
이 후, 누름 핀(191)에 의해 상 웨이퍼(W1)의 중심부와 하 웨이퍼(W2)의 중심부를 누른 상태로, 상 척(140)에 의한 상 웨이퍼(W1)의 전체의 흡착 유지를 해제한다(단계(S114)). 이에 의해, 도 7의 (b)에 나타내는 바와 같이, 상 웨이퍼(W1)의 접합면(W1j)과 하 웨이퍼(W2)의 접합면(W2j)이 전면에서 접촉하고, 상 웨이퍼(W1)와 하 웨이퍼(W2)가 접합된다. 이 후, 누름 핀(191)을 상 척(140)까지 상승시켜, 하 척(141)에 의한 하 웨이퍼(W2)의 흡착 유지를 해제한다.
이어서, 중합 웨이퍼(T)는, 반송 장치(61)에 의해 제 4 처리 블록(G4)의 얼라이먼트 측정 장치(55)로 반송된다. 얼라이먼트 측정 장치(55)에서는, 상세하게는 후술하지만, 상 웨이퍼(W1)에 형성된 복수의 얼라이먼트 마크(W1a, W1b, W1c)와, 하 웨이퍼(W2)에 형성된 복수의 얼라이먼트 마크(W2a, W2b, W2c)와의 상대적인 위치 어긋남을 측정한다(단계(S115)).
이 후, 중합 웨이퍼(T)는, 반송 장치(61)에 의해 제 3 처리 블록(G3)의 트랜지션 장치(51)로 반송되고, 이 후, 반입반출 스테이션(2)의 반송 장치(22)에 의해 카세트(C3)로 반송된다. 이렇게 하여, 일련의 접합 처리가 종료된다.
<얼라이먼트 측정 및 그 측정 데이터의 이용>
도 10은 일실시 형태에 따른 얼라이먼트 측정 장치를 나타내는 단면도이다. 얼라이먼트 측정 장치(55)는, 상 웨이퍼(W1)에 형성된 복수의 얼라이먼트 마크(W1a, W1b, W1c)(도 9 참조)와, 하 웨이퍼(W2)에 형성된 복수의 얼라이먼트 마크(W2a, W2b, W2c)(도 9 참조)와의 상대적인 위치 어긋남(이하, 단순히 '위치 어긋남'이라고도 함)을 측정한다. 본 명세서에서 위치 어긋남이란, 상 웨이퍼(W1)와 하 웨이퍼(W2)의 접합면(W1j, W2j)에 대하여 수직인 방향에서 봤을 때의 위치 어긋남을 의미한다. 얼라이먼트 측정 장치(55)가 특허 청구의 범위에 기재된 측정부에 대응한다.
얼라이먼트 측정 장치(55)는, 예를 들면 중합 웨이퍼(T)를 수평으로 유지하는 중합 웨이퍼 유지부(901)와, 중합 웨이퍼 유지부(901)에 유지되어 있는 중합 웨이퍼(T)의 적외선 화상을 취득하는 적외선 촬상부(902)와, 중합 웨이퍼(T)의 적외선 화상을 취득하는 영역에 적외선을 조사하는 적외선 조사부(903)를 구비한다.
적외선 촬상부(902)와 적외선 조사부(903)는, 중합 웨이퍼 유지부(901)를 사이에 두고 반대측에 마련된다. 예를 들면, 중합 웨이퍼 유지부(901)의 상방에 적외선 촬상부(902)가 마련되고, 중합 웨이퍼 유지부(901)의 하방에 적외선 조사부(903)가 마련된다.
적외선 촬상부(902)와 적외선 조사부(903)는 동일 축에 배치된다. 적외선 조사부(903)로부터 출사된 적외선은, 링 형상으로 형성된 중합 웨이퍼 유지부(901)의 개구부를 통과하고, 중합 웨이퍼 유지부(901)에 유지되어 있는 중합 웨이퍼(T)에 대하여 수직으로 입사한다. 중합 웨이퍼(T)를 투과한 적외선은 적외선 촬상부(902)에 의해 수광된다.
적외선 촬상부(902)에 의해 취득되는 각 적외선 화상은, 상 웨이퍼(W1)의 얼라이먼트 마크와, 하 웨이퍼(W2)의 얼라이먼트 마크의 양방을 적어도 1 개씩 포함한다. 이 때문에, 각 적외선 화상에 있어서 상 웨이퍼(W1)의 얼라이먼트 마크와 하 웨이퍼(W2)의 얼라이먼트 마크와의 상대적인 위치 어긋남을 측정할 수 있다.
얼라이먼트 측정 장치(55)는, 중합 웨이퍼 유지부(901)를 X축 방향, Y축 방향 및 θ 방향으로 이동시키는 이동부(미도시)를 구비한다. 중합 웨이퍼 유지부(901)를 이동시킴으로써, 중합 웨이퍼(T)의 적외선 화상을 취득하는 영역을 변경할 수 있어, 중합 웨이퍼(T)의 복수 개소에서 위치 어긋남을 측정할 수 있다.
또한, 본 실시 형태의 이동부는 중합 웨이퍼 유지부(901)를 이동시키지만, 중합 웨이퍼 유지부(901)와 적외선 촬상부(902)를 상대적으로 이동시키면 된다. 중합 웨이퍼 유지부(901)를 이동시켜도 적외선 촬상부(902)를 이동시켜도, 중합 웨이퍼(T)의 적외선 화상을 취득하는 영역을 변경할 수 있어, 중합 웨이퍼(T)의 복수 개소에서 위치 어긋남을 측정할 수 있다.
도 11은 일실시 형태에 따른 제어 장치의 구성 요소를 기능 블록으로 나타내는 도이다. 도 11에 도시되는 각 기능 블록은 개념적인 것이며, 반드시 물리적으로 도시와 같이 구성되어 있는 것을 요하지 않는다. 각 기능 블록의 전부 또는 일부를, 임의의 단위로 기능적 또는 물리적으로 분산·통합하여 구성하는 것이 가능하다. 각 기능 블록에서 행해지는 각 처리 기능은, 그 전부 또는 임의의 일부가, CPU로 실행되는 프로그램으로 실현되고, 혹은 와이어드 로직에 의한 하드웨어로서 실현될 수 있다.
도 11에 나타내는 바와 같이, 제어 장치(70)는 측정 데이터 해석부(701), 위치 조정 제어부(702), 뒤틀림 제어부(703), 판정부(704) 등을 가진다. 측정 데이터 해석부(701)는 얼라이먼트 측정 장치(55)에 의해 측정한 측정 데이터를 해석한다. 위치 조정 제어부(702)는 과거의 접합에 있어서 생긴 위치 어긋남에 기초하여, 금회의 접합에 있어서의 상 척(140)에 유지되어 있는 상 웨이퍼(W1)와, 하 척(141)에 유지되어 있는 하 웨이퍼(W2)와의 수평면 내에 있어서의 위치 조정을 제어한다. 뒤틀림 제어부(703)는 과거의 접합에 있어서 생긴 위치 어긋남에 기초하여, 금회의 접합에 있어서 하 척(141)에 유지되는 하 웨이퍼(W2)의 뒤틀림을 제어한다. 판정부(704)는 과거의 접합에 있어서 생긴 위치 어긋남과, 금회의 접합에 있어서 생긴 위치 어긋남에 유의 차가 있는지 여부를 통계 해석에 의해 판정한다. 예를 들면 통계값이 미리 설정된 범위 외인 경우에, 유의 차가 있다고 판정된다. 또한, 통계값이 미리 설정된 범위 내인 경우에, 유의 차가 없다고 판정된다.
도 12는 일실시 형태에 따른 측정 데이터 해석부에 의한 처리를 나타내는 설명도이다. 도 12의 (a)는 일실시 형태에 따른 중합 웨이퍼에 고정된 xy 좌표계에 있어서의 복수 개소에서의 위치 어긋남을 나타내는 도이다. 도 12의 (a)에서 x축 및 y축은 서로 수직인 축으로서, 상 웨이퍼(W1)의 접합면(W1j) 및 하 웨이퍼(W2)의 접합면(W2j)에 대하여 평행인 축이다. 도 12의 (a)에 있어서, 상 웨이퍼(W1)에 고정되는 x축과 하 웨이퍼(W2)에 고정되는 x축은 중첩되어 있고, 상 웨이퍼(W1)에 고정되는 y축과 하 웨이퍼(W2)에 고정되는 y축은 중첩되어 있다. 도 12의 (b)는 도 12의 (a)에 나타내는 위치 어긋남의 크기 및 불균일을 최소화하기 위한 평행 이동 및 회전 이동을 실시한 후에 남는 각 개소에서의 위치 어긋남을 나타내는 설명도이다. 도 12의 (b)에서 실선으로 나타내는 x축 및 y축은 상 웨이퍼(W1)에 고정된 것이며, 파선으로 나타내는 x축 및 y축은 하 웨이퍼(W2)에 고정된 것이다.
먼저, 측정 데이터 해석부(701)는, 도 12의 (a)에 나타내는 바와 같이, 중합 웨이퍼(T)에 고정된 xy 좌표계에 있어서의 복수 개소에서의 위치 어긋남을 산출한다. 이 산출에는, 적외선 촬상부(902)에 의해 촬상한 화상에 있어서의 상 웨이퍼(W1)의 얼라이먼트 마크(W1a, W1b, W1c)와 하 웨이퍼(W2)의 얼라이먼트 마크(W2a, W2b, W2c)와의 상대적인 위치 어긋남과, 그 화상을 촬상했을 시의 적외선 촬상부(902)에 대한 중합 웨이퍼 유지부(901)의 수평 방향 위치(X축 방향 위치, Y축 방향 위치 및 θ 방향 위치를 포함함)가 이용된다.
또한, 위치 어긋남을 측정하는 측정 개소는 3 개소에는 한정되지 않고, 4 개소 이상이어도 된다. 또한, 위치 어긋남을 측정하기 위한 얼라이먼트 마크의 형상은 십자 형상으로 한정되지는 않는다.
이어서 측정 데이터 해석부(701)는, 도 12의 (b)에 나타내는 바와 같이 위치 어긋남의 크기 및 불균일을 최소화하기 위한, 상 웨이퍼(W1)에 대한 하 웨이퍼(W2)의 평행 이동(Δx, Δy) 및 회전 이동(Δθ)을 산출한다. 평행 이동 및 회전 이동은, 예를 들면 위치 어긋남의 최대값이 가능한 한 작아지도록, 또한 위치 어긋남의 표준 편차가 가능한 한 작아지도록 행해진다. 또한, 불균일은 표준 편차 대신에, 최대값과 최소값과의 차 등으로 나타내져도 된다.
이 때, 측정 데이터 해석부(701)는, 평행 이동 및 회전 이동을 실시한 후에 남는, 각 개소에서의 위치 어긋남도 산출한다. 최적인 평행 이동 및 회전 이동의 산출과, 그 최적인 평행 이동 및 회전 이동을 실시한 후에 남는 각 개소에서의 위치 어긋남의 산출은 실질적으로 동시에 행해진다.
또한, 본 실시 형태에서는 하 웨이퍼(W2)를 평행 이동 및 회전 이동시키지만, 하 웨이퍼(W2)를 평행 이동시키고 또한 상 웨이퍼(W1)를 회전 이동시켜도 되고, 상 웨이퍼(W1)를 평행 이동 및 회전 이동시켜도 된다.
도 13은 일실시 형태에 따른 얼라이먼트 측정 장치의 측정 데이터에 기초하여 접합 장치의 설정을 구하는 처리를 나타내는 순서도이다. 도 13의 단계(S201) 이후의 처리는, 제어 장치(70)에 의한 제어 하에서 행해지고, 예를 들면 위치 조정의 보정 지령을 받았을 때에 실행된다. 위치 조정의 보정 지령은, 예를 들면 상 웨이퍼(W1) 또는 하 웨이퍼(W2)의 제조 조건(제조 로트를 포함함)이 변경되었을 때에 작성된다.
먼저, 접합 시스템(1)은 도 8의 단계(S101 ~ S114)를 실시하고, 상 웨이퍼(W1)와 하 웨이퍼(W2)를 접합한다(단계(S201)). 이어서, 얼라이먼트 측정 장치(55)가, 도 8의 단계(S115)와 마찬가지로, 상 웨이퍼(W1)와 하 웨이퍼(W2)와의 상대적인 위치 어긋남을 복수 개소에서 측정한다(단계(S202)).
이어서, 측정 데이터 해석부(701)가, 위치 어긋남의 크기 및 불균일을 최소화하기 위한, 평행 이동(Δx, Δy) 및 회전 이동(Δθ)을 산출한다(단계(S203)). 또한, 측정 데이터 해석부(701)는 단계(S203)에서 산출한 평행 이동 및 회전 이동을 실시한 후에 남는 각 개소에서의 위치 어긋남을 산출한다(단계(S204)).
또한, 평행 이동 및 회전 이동의 산출(단계(S203))과, 그 평행 이동 및 회전 이동을 실시한 후에 남는 각 개소에서의 위치 어긋남의 산출(단계(S204))은 실질적으로 동시에 행해진다.
이어서, 측정 데이터 해석부(701)는 산출 데이터의 축적수가 정해진 수 이상인지 여부를 체크한다(단계(S205)). 산출 데이터란, 평행 이동(Δx, Δy) 및 회전 이동(Δθ), 그리고 평행 이동 및 회전 이동을 실시한 후에 남는 각 개소에서의 위치 어긋남에 관한 데이터이다. 정해진 수는, 예를 들면 산출 데이터의 분포가 정규 분포가 된다고 기대되는 수(예를 들면 20) 이상으로 설정된다.
산출 데이터의 축적수가 정해진 수 미만인 경우(단계(S205), No), 산출 데이터의 축적수가 통계 해석에 충분한 수에 달하고 있지 않기 때문에, 우연히 생긴 외란에 의해 산출 데이터의 분포에 편향이 생겨 있을 우려가 있다. 따라서 이 경우, 제어 장치(70)는 단계(S201)로 돌아와, 단계(S201) 이후의 처리를 반복한다. 즉, 중합 웨이퍼(T)의 매수가 정해진 수에 달할 때까지, 단계(S201) ~ 단계(S204)가 반복하여 행해진다.
한편, 산출 데이터의 축적수가 정해진 수 이상인 경우(단계(S205), Yes), 축적수가 통계 해석에 충분한 수에 달하고 있다. 이 때문에, 제어 장치(70)는 단계(S206)로 진행되어, 단계(S206) 이후의 처리를 행한다.
단계(S206)에서는, 측정 데이터 해석부(701)가, 산출 데이터를 통계 해석함으로써, 접합 전에 행해지는 상 웨이퍼(W1)와 하 웨이퍼(W2)와의 수평 방향 위치 조정에 사용하는 보정 데이터(ΔX, ΔY, ΔΘ)를 설정한다. 보정 데이터(ΔX, ΔY, ΔΘ)로서는, 예를 들면 산출 데이터(Δx, Δy, Δθ)의 평균값이 채용된다.
또한, 산출 데이터의 축적수가 정해진 수에 달해도 산출 데이터의 분포가 정규 분포가 되지 않는 경우, 보정 데이터(ΔX, ΔY, ΔΘ)로서는 산출 데이터(Δx, Δy, Δθ)의 중앙값이 채용되어도 된다.
이어서, 측정 데이터 해석부(701)는 보정 데이터를 사용하여 수평 방향 위치 조정을 행하는 경우에 남는 위치 어긋남을 예측한다(단계(S207)). 이 위치 어긋남은, 예를 들면 산출 데이터의 평균값(또는 중앙값)이 채용된다.
이어서, 측정 데이터 해석부(701)는 예측한 위치 어긋남을 저감하기 위하여 하 웨이퍼(W2)에 뒤틀림을 발생시키는 파라미터를 설정한다(단계(S208)). 하 웨이퍼(W2)에 뒤틀림을 발생시키는 파라미터로서는, (1) 하 척(141)의 하 웨이퍼(W2)를 흡착하는 흡착면(141a)에 있어서의 흡착 압력 외에, (2) 하 웨이퍼(W2)의 온도, (3) 하 척(141)의 흡착면(141a)의 형상 등을 들 수 있다.
(1) 하 척(141)의 흡착면(141a)에 있어서의 흡착 압력의 분포가 바뀌면, 하 웨이퍼(W2)에 작용하는 응력의 분포가 바뀌기 때문에, 하 웨이퍼(W2)의 형상이 바뀐다. 이 때문에, 하 척(141)의 흡착면(141a)에 있어서의 흡착 압력의 분포를 제어함으로써, 하 웨이퍼(W2)의 뒤틀림을 제어할 수 있다. 하 척(141)의 흡착면(141a)은 복수의 영역으로 구획되고, 구획된 영역마다 흡착 압력의 설정이 이루어진다. 하 척(141)의 흡착면(141a)으로 하 웨이퍼(W2)를 흡착할 때에, 하 척(141)의 흡착면(141a)의 전체에 흡착 압력을 발생시켜도 되고, 하 척(141)의 흡착면(141a)의 일부에만 흡착 압력을 발생시켜도 된다. 하 웨이퍼(W2)의 온도를 일정하게 유지하면서, 하 웨이퍼(W2)의 뒤틀림을 제어할 수 있다.
(2) 하 웨이퍼(W2)의 온도의 분포가 바뀌면, 하 웨이퍼(W2)가 국소적으로 늘어나거나 줄어들기 때문에, 하 웨이퍼(W2)의 형상이 바뀐다. 이 때문에, 하 웨이퍼(W2)의 온도 분포를 제어함으로써, 뒤틀림을 제어할 수 있다. 하 웨이퍼(W2)의 온도 분포의 제어는, 예를 들면 하 척(141)에 의한 하 웨이퍼(W2)의 흡착을 해제한 상태에서 행해진다. 이어서, 하 웨이퍼(W2)의 온도 분포에 불균일이 생겨 있는 상태에서, 하 척(141)이 하 웨이퍼(W2)를 흡착한다. 이 후, 하 웨이퍼(W2)의 흡착이 다시 해제될 때까지, 하 웨이퍼(W2)의 형상이 고정된다. 하 웨이퍼(W2)의 흡착이 다시 해제될 때까지, 하 웨이퍼(W2)의 온도 분포가 균일하게 되어도, 하 웨이퍼(W2)의 온도 분포에 불균일이 생겨 있었을 때의 형상이 유지된다.
(3) 하 척(141)의 흡착면(141a)에 하 웨이퍼(W2)를 흡착한 후, 하 척(141)의 흡착면(141a)의 형상이 바뀌면, 그 변화에 추종하도록 하 웨이퍼(W2)의 형상이 바뀐다. 이 때문에, 하 척(141)의 흡착면(141a)의 형상을 제어함으로써, 하 웨이퍼(W2)의 뒤틀림을 제어할 수 있다. 하 척(141)의 흡착면(141a)은, 예를 들면 평탄면과 만곡면과의 사이에서 변형되어도 된다. 만곡면은, 예를 들면 위로 볼록한 돔 형상을 가진다. 하 척(141)의 흡착면(141a)에 하 웨이퍼(W2)를 흡착한 후, 하 척(141)의 흡착면(141a)을 평탄면으로부터 만곡면으로 변화시키면, 하 웨이퍼(W2)의 형상이 위로 볼록한 돔 형상이 된다. 이에 의해, 하 웨이퍼(W2)를 직경 방향으로 확대할 수 있어, 하 웨이퍼(W2)의 크기와 상 웨이퍼(W1)의 크기를 일치시킬 수 있다. 상 웨이퍼(W1)는 스트라이커(190)에 의해 아래로 볼록한 돔 형상으로 휘어, 직경 방향으로 확대된다.
상기 (1) ~ (3)의 파라미터 중, 1 개의 파라미터를 제어함으로써 하 웨이퍼(W2)의 뒤틀림을 제어해도 되고, 복수의 파라미터를 제어함으로써 하 웨이퍼(W2)의 뒤틀림을 제어해도 된다. 복수의 파라미터를 제어하는 경우에, 파라미터의 조합은 특별히 한정되지 않는다.
또한, 하 웨이퍼(W2)에 뒤틀림을 발생시키는 파라미터의 설정에 따라, 접합 전에 행해지는 상 웨이퍼(W1)와 하 웨이퍼(W2)와의 수평 방향 위치 조정에 사용하는 보정 데이터(ΔX, ΔY, ΔΘ)의 재설정이 행해져도 된다.
이와 같이 하여, 얼라이먼트 측정 장치(55)에 의해 측정된 측정 데이터에 기초하는, 접합 장치(41)에서 사용되는 설정을 구하는 처리가 종료된다.
도 14는 일실시 형태에 따른 얼라이먼트 측정 장치의 측정 데이터에 기초하는 접합 장치의 동작 처리를 나타내는 순서도이다. 도 14의 단계(S301) 이후의 처리는, 제어 장치(70)에 의한 제어 하에서 행해지고, 예를 들면 도 13에 나타내는 일련의 처리의 종료 이후에, 상 웨이퍼(W1)와 하 웨이퍼(W2)를 접합하는 지령을 받았을 때에 실행된다.
먼저, 접합 시스템(1)은, 도 13의 단계(S206 및 S208)에서 구한 설정에 따라, 도 8의 단계(S101 ~ S114)를 실시하고, 상 웨이퍼(W1)와 하 웨이퍼(W2)를 접합한다(단계(S301)).
예를 들면, 뒤틀림 제어부(703)는, 도 13의 단계(S208)에서 구한 흡착 압력의 설정에 따라, 도 8의 단계(S109)에서 하 웨이퍼(W2)의 흡착 유지를 실시한다. 또한 상술한 바와 같이, 하 웨이퍼(W2)의 뒤틀림은 흡착 압력 외에, 흡착면 형상, 온도 등으로 제어해도 된다.
또한, 위치 조정 제어부(702)는 도 13의 단계(S206)에서 구한 보정 데이터(ΔX, ΔY, ΔΘ)의 설정에 기초하여, 도 8의 단계(S110)에서 수평 방향 위치 조정을 실시한다. 구체적으로, 위치 조정 제어부(702)는 상부 촬상부(151)로 촬상된 화상 데이터 및 하부 촬상부(161)로 촬상된 화상 데이터와 보정 데이터에 기초하여, 수평 방향 위치 조정을 행한다. 양 화상 데이터와 보정 데이터에 기초하여 구해지는 수평 방향 위치 조정 후의 하 척(141)의 위치와, 양 화상 데이터에만 기초하여 구해지는 수평 방향 위치 조정 후의 하 척(141)의 위치와의 차분은, 예를 들면 보정 데이터와 동일하다. 또한, 수평 방향 위치 조정은 본 실시 형태에서는 하 척(141)의 이동에 의해 실시하지만, 상술한 바와 같이 상 척(140)의 이동에 의해 실시해도 되고, 양방의 이동에 의해 실시해도 된다.
이어서, 얼라이먼트 측정 장치(55)가, 도 13의 단계(S202)와 마찬가지로, 상 웨이퍼(W1)와 하 웨이퍼(W2)와의 상대적인 위치 어긋남을 복수 개소에서 측정한다(단계(S302)).
이어서, 측정 데이터 해석부(701)가, 도 13의 단계(S203)와 마찬가지로, 위치 어긋남의 크기 및 불균일을 최소화하기 위한, 평행 이동(Δx, Δy) 및 회전 이동(Δθ)을 산출한다(단계(S303)). 또한, 측정 데이터 해석부(701)는 단계(S303)에서 산출한 평행 이동 및 회전 이동을 실시한 후에 남는 각 개소에서의 위치 어긋남을 산출한다(단계(S304)).
또한, 평행 이동 및 회전 이동의 산출(단계(S303))과, 그 평행 이동 및 회전 이동을 실시한 후에 남는 각 개소에서의 위치 어긋남의 산출(단계(S304))은 실질적으로 동시에 행해진다.
이어서, 판정부(704)는 과거의 접합에 있어서 생긴 위치 어긋남과, 금회의 접합에 있어서 생긴 위치 어긋남에 유의 차가 있는지 여부를 통계 해석에 의해 판정한다(단계(S305)). 과거 복수 회의 접합에 있어서 생긴 위치 어긋남과, 가장 최근의 복수 회(금회를 포함함)의 접합에 있어서 생긴 위치 어긋남에 유의 차가 있는지 여부를 통계 해석에 의해 판정해도 된다. 통계 해석에는, 예를 들면 t 검정(Student's t-test) 또는 F 검정(F test) 등이 이용된다.
이 판정에서는, 과거의 접합에 있어서 생긴 위치 어긋남으로서, 예를 들면 도 13의 단계(S203)에서 산출되는 평행 이동(Δx, Δy) 및 회전 이동(Δθ), 그리고 도 13의 단계(S204)에서 산출되는 각 개소에서의 위치 어긋남으로부터 선택되는 적어도 1 개가 이용된다. Δx만 또는 Δy만이 이용되어도 된다.
또한 이 판정에서는, 금회의 접합에 있어서 생긴 위치 어긋남으로서, 예를 들면 도 14의 단계(S303)에서 산출되는 평행 이동(Δx, Δy) 및 회전 이동(Δθ), 그리고 도 14의 단계(S304)에서 산출되는 각 개소에서의 위치 어긋남으로부터 선택되는 적어도 1 개가 이용된다. Δx만 또는 Δy만이 이용되어도 된다.
과거의 접합에 있어서 생긴 위치 어긋남과, 금회의 접합에 있어서 생긴 위치 어긋남에 유의 차가 있는 경우(단계(S305), Yes), 중합 웨이퍼(T)의 품질이 허용 범위로부터 일탈하고 있어, 흡착 불량 등의 문제가 생겨 있을 가능성이 있다. 따라서 이 경우, 판정부(704)는 이상이라 판정하고(단계(S306)), 금회의 처리를 종료한다.
또한, 판정부(704)가 이상이라 판정한 경우, 제어 장치(70)는 접합 시스템(1)의 사용자에게 경보를 통지해도 된다. 경보는 화상, 음성, 버저 등의 형태로 출력된다. 사용자가 접합 시스템(1)을 수리한 후, 단계(S301) 이후의 처리가 재개된다. 이와 같이 흡착 불량 등의 문제가 생겨 있는 경우에 접합을 중단함으로써, 낭비되는 불량품의 생산을 억제할 수 있다.
한편, 과거의 접합에 있어서 생긴 위치 어긋남과, 금회의 접합에 있어서 생긴 위치 어긋남에 유의 차가 없는 경우(단계(S305), No), 중합 웨이퍼(T)의 품질이 허용 범위에 들어가 있다. 따라서 이 경우, 판정부(704)는 정상이라 판정하고(단계(S307)), 그대로 금회의 처리를 종료한다.
이상 설명한 바와 같이, 본 실시 형태에 따르면, 과거의 접합에 있어서 생긴 얼라이먼트 마크끼리의 위치 어긋남에 기초하여, 금회의 접합에 있어서의 수평 방향 위치 조정을 제어한다. 상부 촬상부(151) 또는 하부 촬상부(161)의 화상 데이터에만 기초하는 수평 방향 위치 조정에서는 다 해소되지 못한 얼라이먼트 마크끼리의 위치 어긋남을, 저감할 수 있다.
또한 본 실시 형태에 따르면, 과거의 접합에 있어서 생긴 얼라이먼트 마크끼리의 위치 어긋남에 기초하여, 금회의 접합에 있어서의 하 웨이퍼(W2)의 뒤틀림을 제어한다. 이에 의해, 상 웨이퍼(W1)와 하 웨이퍼(W2)와의 상대적인 평행 이동 또는 회전 이동에서는 해소할 수 없는 얼라이먼트 마크끼리의 위치 어긋남을 저감할 수 있다.
또한 본 실시 형태에 따르면, 과거의 접합에 있어서 생긴 얼라이먼트 마크끼리의 위치 어긋남과, 금회의 접합에 있어서 생긴 얼라이먼트 마크끼리의 위치 어긋남에 유의 차가 있는지 여부를 통계 해석에 의해 판정한다. 이에 의해, 중합 웨이퍼(T)의 품질이 허용 범위로부터 일탈하고 있는지 여부를 판정할 수 있어, 흡착 불량 등의 문제가 생겨 있는지 여부를 판정할 수 있다. 또한, 흡착 불량 등의 문제가 생겨 있는 경우에, 접합을 중단함으로써, 낭비되는 불량품의 생산을 억제할 수 있다.
<하 웨이퍼의 뒤틀림의 제어>
도 15는 일실시 형태에 따른 하 척의 흡착면을 나타내는 평면도이다. 도 15에 나타내는 하 척(141)은, 하 웨이퍼(W2)를 흡착하는 흡착면(141a)에, 하 웨이퍼(W2)를 흡착하는 흡착 압력(예를 들면 진공 압력)이 독립으로 제어되는 복수의 영역(예를 들면 원호 영역(A1), 원호 영역(A2), 원호 영역(B1), 원호 영역(B2), 원 영역(C))을 가진다. 원호 영역(A1) 및 원호 영역(A2)은 둘레 방향으로 교호로 배열되고, 링 영역(A)을 형성한다. 이 링 영역(A)의 직경 방향 내측에는, 원호 영역(B1) 및 원호 영역(B2)이 둘레 방향으로 교호로 배열되어, 링 영역(B)을 형성한다. 링 영역(B)의 내측에는 원 영역(C)이 형성된다. 즉, 흡착면(141a)은 직경 방향 외측으로부터 직경 방향 내측을 향해, 링 영역(A), 링 영역(B) 및 원 영역(C)으로 구획된다. 링 영역(A)은 둘레 방향에, 복수의 원호 영역(A1, A2)으로 구획된다. 마찬가지로 링 영역(B)은 둘레 방향에, 복수의 원호 영역(B1, B2)으로 구획된다.
1 개의 진공 펌프(251)는 1 개의 진공 레귤레이터(261)가 도중에 마련되는 배관을 개재하여 복수의 원호 영역(A1)과 접속된다(도 15에서는 1 개의 원호 영역(A1)과 접속되는 배관만 도시함). 마찬가지로 1 개의 진공 펌프(252)는, 1 개의 진공 레귤레이터(262)가 도중에 마련되는 배관을 개재하여 복수의 원호 영역(A2)과 접속된다(도 15에서는 1 개의 원호 영역(A2)과 접속되는 배관만 도시함). 또한, 1 개의 진공 펌프(253)는, 1 개의 진공 레귤레이터(263)가 도중에 마련되는 배관을 개재하여 복수의 원호 영역(B1)과 접속된다(도 15에서는 1 개의 원호 영역(B1)과 접속되는 배관만 도시함). 마찬가지로 1 개의 진공 펌프(254)는, 1 개의 진공 레귤레이터(264)가 도중에 마련되는 배관을 개재하여 복수의 원호 영역(B2)과 접속된다(도 15에서는 1 개의 원호 영역(B2)과 접속되는 배관만 도시함). 또한 1 개의 진공 펌프(255)는, 1 개의 진공 레귤레이터(265)가 도중에 마련되는 배관을 개재하여 1 개의 원 영역(C)과 접속된다.
제어 장치(70)가 진공 펌프(251)를 작동시키면, 진공 펌프(251)가 각 원호 영역(A1)에 진공 압력을 발생시키고, 그 진공 압력이 진공 레귤레이터(261)에 있어서 미리 설정된 설정값으로 유지되어, 그 설정값에 대응하는 흡착 압력이 각 원호 영역(A1)에 발생한다. 제어 장치(70)가 진공 펌프(251)의 작동을 정지시키면, 각 원호 영역(A1)이 대기압으로 돌아와, 각 원호 영역(A1)에 있어서의 흡착 압력의 발생이 해제된다. 그 외의 원호 영역(A2), 원호 영역(B1), 원호 영역(B2), 원 영역(C)에 있어서의 흡착 압력의 발생 및 해제는, 원호 영역(A1)에 있어서의 흡착 압력의 발생 및 해제와 동일하므로, 설명을 생략한다.
진공 펌프(251 ~ 255) 및 진공 레귤레이터(261 ~ 265) 등에 의해, 흡착 압력 분포 조절부(250)가 구성된다. 흡착 압력 분포 조절부(250)는 하 척(141)의 하 웨이퍼(W2)를 흡착하는 흡착 압력의 분포를 조절함으로써, 하 웨이퍼(W2)에 뒤틀림을 발생시킨다. 복수의 진공 펌프(251 ~ 255) 중 작동시키는 진공 펌프의 변경, 진공 레귤레이터(261 ~ 265)의 설정값의 변경 등에 의해 흡착 압력의 분포를 변경할 수 있다. 이들 설정 변경은 뒤틀림 제어부(703)에 의해 이루어진다. 또한, 흡착 압력이 독립으로 제어되는 영역의 배치는, 도 15에 나타내는 배치에는 한정되지 않는다.
또한 하 척(141)은, 본 실시 형태에서는 하 웨이퍼(W2)를 진공 흡착하지만, 하 웨이퍼(W2)를 정전 흡착해도 된다. 이 경우, 하 척(141)의 내부에 매설되는 복수의 내부 전극, 및 복수의 내부 전극에 독립으로 전력을 공급하는 전력 공급부 등으로, 흡착 압력 분포 조절부(250)가 구성된다. 전력 공급부는 예를 들면 강압형 DC/DC 컨버터 또는 승압형 DC/DC 컨버터 등으로 구성된다. 복수의 내부 전극 중 전력을 공급하는 내부 전극의 변경, 공급 전력의 변경 등에 의해 흡착 압력의 분포를 변경할 수 있다.
도 16은 일실시 형태에 따른 상 척, 하 척 및 온도 분포 조절부를 나타내는 측면도이다. 상 척(140)과 온도 분포 조절부(500)는 공통의 수평 프레임(590)에 고정되고, 하 척(141)은 상 척(140) 및 온도 분포 조절부(500)보다 하방에 배치된다.
온도 분포 조절부(500)는 하 척(141)에 유지되는 하 웨이퍼(W2)의 온도 분포를 조절함으로써, 하 웨이퍼(W2)에 뒤틀림을 발생시킨다. 온도 분포 조절부(500)는 하 웨이퍼(W2)보다 큰 직경의 하면을 가지는 본체부(510)와, 본체부(510)를 상방으로부터 지지하는 지지부(520)와, 지지부(520)를 연직 방향으로 이동시키는 승강부(530)를 구비한다.
본체부(510)는 수평 프레임(590)의 하방에 있어서, 승강 가능하게 이루어진다. 승강부(530)는 수평 프레임(590)에 고정되고, 수평 프레임(590)에 대하여 본체부(510)를 승강시킨다. 이에 의해, 본체부(510)와 하 척(141)과의 거리를 조절할 수 있다.
도 17은 일실시 형태에 따른 온도 분포 조절부의 본체부를 나타내는 측면 단면도이다. 본체부(510)는, 도 17에 나타내는 바와 같이 냉각부(550)와 가열부(560)를 구비한다.
냉각부(550)는 예를 들면 본체부(510)의 내부에 형성된 유로이며, 냉각수 등의 냉매를 냉각부(550)에 유입시키는 유입관(551)과, 냉각부(550)로부터 냉매를 유출시키는 유출관(552)에 접속된다. 이러한 냉각부(550)는 온도 조절된 냉매를 유통시킴으로써, 하 웨이퍼(W2)를 전면적 또한 균일하게 냉각한다.
한편, 가열부(560)는 하 웨이퍼(W2)를 국소적으로 가열하는 것이 가능하다. 구체적으로, 가열부(560)는 복수의 독립한 발열 영역(561a)을 가지고 있고, 이들 복수의 발열 영역(561a)을 선택적으로 발열시킴으로써, 하 웨이퍼(W2)의 일부 또는 전체를 가열할 수 있다. 발열 영역(561a)의 선택은 뒤틀림 제어부(703)에 의해 이루어진다.
본 실시 형태에 따르면, 가열부(560)에 의한 하 웨이퍼(W2)의 국소적인 가열과 냉각부(550)에 의한 하 웨이퍼(W2)의 온도 조절을 동시에 실시할 수 있다. 또한, 본 실시 형태에서는 하 웨이퍼(W2)의 국소적인 가열이 행해지지만, 하 웨이퍼(W2)의 국소적인 냉각이 행해져도 된다. 하 웨이퍼(W2)의 온도 분포에 불균일이 생기면 된다.
하 웨이퍼(W2)의 온도 분포의 조절은, 예를 들면 하 척(141)에 의한 하 웨이퍼(W2)의 흡착을 해제한 상태로 행해진다. 이어서, 하 웨이퍼(W2)의 온도 분포에 불균일이 생겨 있는 상태에서, 하 척(141)이 하 웨이퍼(W2)를 흡착한다. 이 후, 하 웨이퍼(W2)와 상 웨이퍼(W1)와의 접합이 이루어지고, 하 웨이퍼(W2)의 흡착이 다시 해제될 때까지, 하 웨이퍼(W2)의 형상이 고정된다.
도 18은 변형예에 따른 하 척을 나타내는 측면 단면도이다. 도 18의 (a)는 하 척(141)의 흡착면(141a)이 평탄면일 때의 상태를 나타내고, 도 18의 (b)는 하 척(141)의 흡착면(141a)이 위로 볼록한 돔 형상의 만곡면일 때의 상태를 나타낸다. 본 변형예의 하 척(141)은, 하 웨이퍼(W2)를 흡착하는 흡착면(141a)을 가지는 탄성 변형부(610)와, 당해 탄성 변형부(610)를 지지하는 기대부(620)를 가진다.
탄성 변형부(610)는 하 웨이퍼(W2)를 흡착하는 흡착면(141a)에 흡인 홈(601)을 가진다. 흡인 홈(601)의 레이아웃은 임의로 설정할 수 있다. 흡인 홈(601)은 흡인관(602)을 개재하여 진공 펌프(603)와 접속된다. 진공 펌프(603)를 작동시키면, 탄성 변형부(610)의 상면에 하 웨이퍼(W2)가 진공 흡착된다. 한편, 진공 펌프(603)의 작동을 정지시키면, 하 웨이퍼(W2)의 진공 흡착이 해제된다.
탄성 변형부(610)는 예를 들면 알루미나 세라믹 또는 SiC 등의 세라믹 재료로 형성된다. 또한, 기대부(620)도 탄성 변형부(610)와 마찬가지로, 알루미나 세라믹 또는 SiC 등의 세라믹 재료로 형성된다.
기대부(620)는 탄성 변형부(610)의 하방에 마련되고, 탄성 변형부(610)의 주위에는 고정 링(630)이 마련된다. 탄성 변형부(610)의 외주부가 고정 링(630)에 의해 기대부(620)에 고정된다.
탄성 변형부(610)의 하면과 기대부(620)의 상면과의 사이에는, 밀폐된 압력 가변 공간(640)이 형성된다. 흡착면 변형부(650)는 압력 가변 공간(640)의 기압을 조절함으로써, 탄성 변형부(610)의 흡착면(141a)의 형상을 조절한다.
흡착면 변형부(650)는 급배기관(651)을 가지고, 급배기관(651)은 기대부(620)의 상면에 형성된 급배기구(621)와 접속된다. 급배기관(651)에는 전환 밸브(652)를 거쳐, 압력 가변 공간(640)으로 공기를 공급하는 전공 레귤레이터(653)와, 압력 가변 공간(640)의 공기를 배출하기 위한 진공 펌프(654)가 접속된다. 전환 밸브(652)는 하기 (A)의 상태와, 하기 (B)의 상태로 전환된다. (A) 전환 밸브(652)와 진공 펌프(654)를 연결하는 유로가 급배기구(621)에 대하여 개방되고, 또한 전환 밸브(652)와 전공 레귤레이터(653)를 연결하는 유로가 급배기구(621)에 대하여 폐색된다. (B) 전환 밸브(652)와 진공 펌프(654)를 연결하는 유로가 급배기구(621)에 대하여 폐색되고, 또한 전환 밸브(652)와 전공 레귤레이터(653)를 연결하는 유로가 급배기구(621)에 대하여 개방된다.
도 18의 (a)에 나타내는 바와 같이, 진공 펌프(654)에 의해 압력 가변 공간(640)의 내부를 진공 배기하여 감압하면(예를 들면 -10 kPa), 기대부(620)에 탄성 변형부(610)가 흡착된다. 이 상태에서, 탄성 변형부(610)의 상면이 평탄면이 된다.
한편, 도 18의 (b)에 나타내는 바와 같이, 전공 레귤레이터(653)에 의해 압력 가변 공간(640)의 내부로 공기를 공급하여 가압하면(예를 들면 0 kPa ~ 100 kPa), 탄성 변형부(610)가 하방으로부터 눌린다. 탄성 변형부(610)의 외주부는 고정 링(630)에 의해 기대부(620)에 고정되어 있기 때문에, 탄성 변형부(610)는 그 중심부가 외주부보다 돌출되고, 탄성 변형부(610)의 상면이 만곡면이 된다. 이 만곡면은 위로 볼록한 돔 형상이다. 만곡면의 곡률 반경은 압력 가변 공간(640)의 기압으로 제어할 수 있다. 압력 가변 공간(640)의 기압의 설정 변경은 뒤틀림 제어부(703)에 의해 이루어진다.
하 척(141)의 흡착면(141a)에 하 웨이퍼(W2)를 흡착한 후, 하 척(141)의 흡착면(141a)의 형상이 바뀌면, 그 변화에 추종하도록 하 웨이퍼(W2)의 형상이 바뀐다. 이 때문에, 하 척(141)의 흡착면(141a)의 형상을 제어함으로써, 하 웨이퍼(W2)의 뒤틀림을 제어할 수 있다.
<변형, 개량>
이상, 본 개시의 접합 시스템 및 접합 방법 등의 실시 형태에 대하여 설명했지만, 본 개시는 상기 실시 형태 등에 한정되지 않는다. 특허 청구의 범위에 기재된 범주 내에서 각종의 변경, 수정, 치환, 부가, 삭제 및 조합이 가능하다. 그들에 대해서도 당연히 본 개시의 기술적 범위에 속한다.
상기 실시 형태 및 상기 변형예에서는 흡착 압력 분포 조절부(250), 온도 분포 조절부(500) 또는 흡착면 변형부(650)가, 뒤틀림 발생부로서 이용된다. 뒤틀림 발생부는 뒤틀림 제어부(703)에 의한 제어 하에서, 하 척(141)에 흡착되는 하 웨이퍼(W2)에 뒤틀림을 발생시킨다. 흡착 압력 분포 조절부(250), 온도 분포 조절부(500), 및 흡착면 변형부(650)는 단독으로 이용되어도 되고, 조합하여 이용되어도 된다. 조합은 특별히 한정되지 않는다.
상기 실시 형태 및 상기 변형예의 뒤틀림 제어부(703)는 하 척(141)에 흡착되는 하 웨이퍼(W2)의 뒤틀림을 제어하지만, 상 척(140)에 흡착되는 상 웨이퍼(W1)의 뒤틀림을 제어해도 된다. 즉, 상기 실시 형태 및 상기 변형예에서는, 상 웨이퍼(W1)가 제 1 기판에, 상 척(140)이 제 1 유지부에, 하 웨이퍼(W2)가 제 2 기판에, 하 척(141)이 제 2 유지부에 대응하지만, 상 웨이퍼(W1)가 제 2 기판에, 상 척(140)이 제 2 유지부에, 하 웨이퍼(W2)가 제 1 기판에, 하 척(141)이 제 1 유지부에 대응해도 된다. 또한, 뒤틀림 제어부(703)는 하 웨이퍼(W2)의 뒤틀림 및 상 웨이퍼(W1)의 뒤틀림의 양방을 제어해도 된다.
본 출원은 2018년 1월 23일에 일본 특허청에 출원된 특허출원 2018-008892호에 기초하는 우선권을 주장하는 것이며, 특허출원 2018-008892호의 모든 내용을 본 출원에 원용한다.
삭제
Claims (10)
- 연직 방향으로 이간하여 배치되는 제 1 유지부 및 제 2 유지부를 구비하고, 상기 제 1 유지부는 제 1 기판을 흡착 유지하는 흡착면을 상기 제 2 유지부에 대향하는 면에 가지고, 상기 제 2 유지부는 제 2 기판을 흡착 유지하는 흡착면을 상기 제 1 유지부에 대향하는 면에 가지고,
상기 제 1 유지부와 상기 제 2 유지부를 상대적으로 이동시킴으로써, 상기 제 1 유지부에 유지되어 있는 상기 제 1 기판과, 상기 제 2 유지부에 유지되어 있는 상기 제 2 기판과의 수평 방향 위치 조정을 행하는 위치 조정부와,
상기 제 1 유지부에 유지되어 있는 상기 제 1 기판과, 상기 제 2 유지부에 유지되어 있는 상기 제 2 기판을 맞누르는 누름부와,
상기 누름부에 의해 상기 제 1 기판과 상기 제 2 기판을 눌러 맞추고, 또한 상기 제 1 기판과 상기 제 2 기판의 접합을 완료시킨 후, 접합 완료 시에 생긴 상기 제 1 기판의 얼라이먼트 마크와 상기 제 2 기판의 얼라이먼트 마크와의 위치 어긋남을 측정하는 측정부와,
과거의 접합 완료 시에 생긴 상기 위치 어긋남에 기초하여, 금회의 접합에 있어서의 상기 수평 방향 위치 조정을 제어하는 위치 조정 제어부와,
상기 제 2 유지부에 유지되는 상기 제 2 기판에 뒤틀림을 발생시키는 뒤틀림 발생부와,
과거의 접합 완료 시에 생긴 상기 위치 어긋남에 기초하여, 금회의 접합에 있어서의 상기 뒤틀림을 제어하는 뒤틀림 제어부를 구비하는, 접합 시스템. - 삭제
- 제 1 항에 있어서,
상기 뒤틀림 발생부는, 상기 제 2 유지부의 상기 제 2 기판을 흡착하는 흡착 압력의 분포를 조절함으로써, 상기 제 2 기판에 상기 뒤틀림을 발생시키는 흡착 압력 분포 조절부를 가지는, 접합 시스템. - 제 1 항 또는 제 3 항에 있어서,
상기 뒤틀림 발생부는, 상기 제 2 기판의 온도 분포를 조절함으로써, 상기 제 2 기판에 상기 뒤틀림을 발생시키는 온도 분포 조절부를 가지는, 접합 시스템. - 제 1 항 또는 제 3 항에 있어서,
상기 뒤틀림 발생부는, 상기 제 2 유지부의 상기 제 2 기판을 흡착하는 흡착면을 변형함으로써, 상기 흡착면에 미리 흡착된 상기 제 2 기판에 상기 뒤틀림을 발생시키는 흡착면 변형부를 가지는, 접합 시스템. - 제 1 항 또는 제 3 항에 있어서,
과거의 접합에 있어서 생긴 상기 위치 어긋남과, 금회의 접합에 있어서 생긴 상기 위치 어긋남에 유의 차가 있는지 여부를 통계 해석에 의해 판정하는 판정부를 가지는, 접합 시스템. - 제 1 항 또는 제 3 항에 있어서,
상기 제 1 기판의 상기 제 2 기판과 접합되는 접합면, 및 상기 제 2 기판의 상기 제 1 기판과 접합되는 접합면을 개질하는 표면 개질 장치와,
상기 표면 개질 장치로 개질된, 상기 제 1 기판의 상기 접합면 및 상기 제 2 기판의 상기 접합면을 친수화하는 표면 친수화 장치와,
상기 제 1 유지부, 상기 제 2 유지부, 상기 위치 조정부 및 상기 누름부를 가지고, 상기 표면 친수화 장치로 친수화된, 상기 제 1 기판의 상기 접합면과 상기 제 2 기판의 상기 접합면을 마주보게 하여 접합하는 접합 장치와,
상기 측정부를 가지고, 상기 접합 장치로 접합된 상기 제 1 기판의 얼라이먼트 마크와 상기 제 2 기판의 얼라이먼트 마크의 상기 위치 어긋남을 측정하는 얼라이먼트 측정 장치를 구비하는, 접합 시스템. - 연직 방향으로 이간하여 배치되는 제 1 유지부 및 제 2 유지부 중, 상기 제 1 유지부의 상기 제 2 유지부에 대향하는 흡착면으로 제 1 기판을 흡착 유지하고, 또한 상기 제 2 유지부의 상기 제 1 유지부에 대향하는 흡착면으로 제 2 기판을 흡착 유지하고,
상기 제 1 유지부와 상기 제 2 유지부를 상대적으로 이동시킴으로써, 상기 제 1 유지부에 흡착 유지되어 있는 상기 제 1 기판과 상기 제 2 유지부에 흡착 유지되어 있는 상기 제 2 기판과의 수평 방향 위치 조정을 행하고,
상기 제 1 유지부에 흡착 유지되어 있는 상기 제 1 기판과, 상기 제 2 유지부에 흡착 유지되어 있는 상기 제 2 기판을 맞누름으로써 접합시키고,
상기 제 1 기판과 상기 제 2 기판을 눌러 맞추고, 또한 상기 제 1 기판과 상기 제 2 기판의 접합을 완료시킨 후, 접합 완료 시에 생긴 상기 제 1 기판의 얼라이먼트 마크와 상기 제 2 기판의 얼라이먼트 마크와의 위치 어긋남을 측정하고,
과거의 접합 완료 시에 생긴 상기 위치 어긋남에 기초하여, 금회의 접합에 있어서의 상기 수평 방향 위치 조정을 제어하고,
상기 제 2 유지부에 유지되는 상기 제 2 기판에 뒤틀림을 발생시키고,
과거의 접합 완료 시에 생긴 상기 위치 어긋남에 기초하여, 금회의 접합에 있어서의 상기 뒤틀림을 제어하는, 접합 방법. - 삭제
- 제 8 항에 있어서,
과거의 접합에 있어서 생긴 상기 위치 어긋남과, 금회의 접합에 있어서 생긴 상기 위치 어긋남에 유의 차가 있는지 여부를 통계 해석에 의해 판정하는, 접합 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020247031875A KR20240144492A (ko) | 2018-01-23 | 2019-01-11 | 접합 시스템 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPJP-P-2018-008892 | 2018-01-23 | ||
| JP2018008892 | 2018-01-23 | ||
| PCT/JP2019/000637 WO2019146427A1 (ja) | 2018-01-23 | 2019-01-11 | 接合システム、および接合方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020247031875A Division KR20240144492A (ko) | 2018-01-23 | 2019-01-11 | 접합 시스템 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200108892A KR20200108892A (ko) | 2020-09-21 |
| KR102711309B1 true KR102711309B1 (ko) | 2024-09-27 |
Family
ID=67395390
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020247031875A KR20240144492A (ko) | 2018-01-23 | 2019-01-11 | 접합 시스템 |
| KR1020207023886A KR102711309B1 (ko) | 2018-01-23 | 2019-01-11 | 접합 시스템 및 접합 방법 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020247031875A KR20240144492A (ko) | 2018-01-23 | 2019-01-11 | 접합 시스템 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US11817338B2 (ko) |
| EP (2) | EP3742474B1 (ko) |
| JP (3) | JP6764040B2 (ko) |
| KR (2) | KR20240144492A (ko) |
| CN (2) | CN118762983A (ko) |
| TW (2) | TWI782169B (ko) |
| WO (1) | WO2019146427A1 (ko) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10840205B2 (en) | 2017-09-24 | 2020-11-17 | Invensas Bonding Technologies, Inc. | Chemical mechanical polishing for hybrid bonding |
| US11056348B2 (en) | 2018-04-05 | 2021-07-06 | Invensas Bonding Technologies, Inc. | Bonding surfaces for microelectronics |
| WO2019241417A1 (en) | 2018-06-13 | 2019-12-19 | Invensas Bonding Technologies, Inc. | Tsv as pad |
| US11393779B2 (en) | 2018-06-13 | 2022-07-19 | Invensas Bonding Technologies, Inc. | Large metal pads over TSV |
| US11011494B2 (en) | 2018-08-31 | 2021-05-18 | Invensas Bonding Technologies, Inc. | Layer structures for making direct metal-to-metal bonds at low temperatures in microelectronics |
| US11158573B2 (en) | 2018-10-22 | 2021-10-26 | Invensas Bonding Technologies, Inc. | Interconnect structures |
| JP7446714B2 (ja) * | 2019-02-01 | 2024-03-11 | 株式会社荏原製作所 | 基板処理装置、および基板処理方法 |
| WO2020226093A1 (ja) * | 2019-05-08 | 2020-11-12 | 東京エレクトロン株式会社 | 接合装置、接合システム及び接合方法 |
| WO2020234850A1 (en) * | 2019-05-22 | 2020-11-26 | Vuereal Inc. | An alignment process for the transfer setup |
| JP7221413B2 (ja) * | 2019-10-10 | 2023-02-13 | 東京エレクトロン株式会社 | 接合システムおよび重合基板の検査方法 |
| US11136202B2 (en) * | 2020-01-06 | 2021-10-05 | Asm Technology Singapore Pte Ltd | Direct transfer apparatus for electronic components |
| TWI801797B (zh) * | 2020-01-21 | 2023-05-11 | 美商粒子監測系統有限公司 | 撞擊器及用於對來自一流體流之生物顆粒取樣之方法 |
| US11545474B2 (en) * | 2020-05-11 | 2023-01-03 | Semileds Corporation | Method and system for transferring alignment marks between substrate systems |
| CN112038220B (zh) * | 2020-08-31 | 2023-02-03 | 上海华力集成电路制造有限公司 | 晶圆键合工艺中改善晶圆边缘形变的方法 |
| US11264357B1 (en) | 2020-10-20 | 2022-03-01 | Invensas Corporation | Mixed exposure for large die |
| US11829077B2 (en) | 2020-12-11 | 2023-11-28 | Kla Corporation | System and method for determining post bonding overlay |
| US11594431B2 (en) | 2021-04-21 | 2023-02-28 | Tokyo Electron Limited | Wafer bonding apparatus and methods to reduce post-bond wafer distortion |
| US11782411B2 (en) * | 2021-07-28 | 2023-10-10 | Kla Corporation | System and method for mitigating overlay distortion patterns caused by a wafer bonding tool |
| US20240063022A1 (en) * | 2022-08-16 | 2024-02-22 | Tokyo Electron Limited | Wafer bonding process with reduced overlay distortion |
| WO2024156345A1 (de) * | 2023-01-25 | 2024-08-02 | Ev Group E. Thallner Gmbh | Verfahren zum bestimmen von verschiebungskarten, verfahren zum einstellen von parametern für einen bondprozess, und verbundsubstrat hergestellt mit solchen parametern und anlage zum herstellen eines verbundsubstrats |
| JP2024126670A (ja) * | 2023-03-08 | 2024-09-20 | 東レエンジニアリング株式会社 | 基板保持装置 |
| WO2024195190A1 (ja) * | 2023-03-23 | 2024-09-26 | 株式会社Screenホールディングス | 基板接合装置および基板接合方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015038982A (ja) * | 2013-07-18 | 2015-02-26 | Nskテクノロジー株式会社 | 基板の保持装置及び密着露光装置並びに近接露光装置 |
| WO2017155002A1 (ja) | 2016-03-11 | 2017-09-14 | ボンドテック株式会社 | 基板接合方法 |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4598641B2 (ja) * | 2000-11-30 | 2010-12-15 | 富士通株式会社 | 貼り合せ基板製造システム |
| JP3892703B2 (ja) * | 2001-10-19 | 2007-03-14 | 富士通株式会社 | 半導体基板用治具及びこれを用いた半導体装置の製造方法 |
| JP4565804B2 (ja) * | 2002-06-03 | 2010-10-20 | スリーエム イノベイティブ プロパティズ カンパニー | 被研削基材を含む積層体、その製造方法並びに積層体を用いた極薄基材の製造方法及びそのための装置 |
| JP4216263B2 (ja) * | 2005-03-09 | 2009-01-28 | シャープ株式会社 | 製造検査解析システム、および製造検査解析方法 |
| JP4720469B2 (ja) * | 2005-12-08 | 2011-07-13 | 株式会社ニコン | 貼り合わせ半導体装置製造用の露光方法 |
| JP5342210B2 (ja) * | 2008-10-30 | 2013-11-13 | 三菱重工業株式会社 | アライメント装置制御装置およびアライメント方法 |
| JP5549344B2 (ja) * | 2010-03-18 | 2014-07-16 | 株式会社ニコン | 基板接合装置、基板ホルダ、基板接合方法、デバイス製造方法および位置合わせ装置 |
| FR2965974B1 (fr) * | 2010-10-12 | 2013-11-29 | Soitec Silicon On Insulator | Procédé de collage moléculaire de substrats en silicium et en verre |
| EP2463892B1 (de) * | 2010-12-13 | 2013-04-03 | EV Group E. Thallner GmbH | Einrichtung, Vorrichtung und Verfahren zur Ermittlung von Ausrichtungsfehlern |
| CN104658950B (zh) * | 2010-12-20 | 2018-01-19 | Ev 集团 E·索尔纳有限责任公司 | 用于保持晶片的容纳装置及用于将晶片对齐的装置和方法 |
| KR102077351B1 (ko) * | 2011-12-14 | 2020-02-13 | 가부시키가이샤 니콘 | 기판 홀더 및 한 쌍의 기판 홀더 |
| KR101945684B1 (ko) * | 2012-05-23 | 2019-02-07 | 가부시키가이샤 니콘 | 절단 기구, 접합 기구, 기판 처리 시스템, 기판 처리 장치, 및 기판 처리 방법 |
| JP6344240B2 (ja) * | 2012-10-26 | 2018-06-20 | 株式会社ニコン | 基板位置合わせ装置、基板貼り合わせ装置、基板位置合わせ方法、及び基板貼り合わせ方法 |
| JP5521066B1 (ja) * | 2013-01-25 | 2014-06-11 | 東京エレクトロン株式会社 | 接合装置及び接合システム |
| JP5575934B2 (ja) * | 2013-01-25 | 2014-08-20 | 東京エレクトロン株式会社 | 接合装置及び接合システム |
| JP2014229677A (ja) * | 2013-05-21 | 2014-12-08 | 東京エレクトロン株式会社 | 接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体 |
| JP2015015269A (ja) * | 2013-07-03 | 2015-01-22 | 東京エレクトロン株式会社 | 接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体 |
| JP2015018920A (ja) * | 2013-07-10 | 2015-01-29 | 東京エレクトロン株式会社 | 接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体 |
| US9646860B2 (en) * | 2013-08-09 | 2017-05-09 | Taiwan Semiconductor Manufacturing Company, Ltd. | Alignment systems and wafer bonding systems and methods |
| JP5538613B1 (ja) | 2013-11-13 | 2014-07-02 | 東京エレクトロン株式会社 | 接合装置及び接合システム |
| JP6283573B2 (ja) * | 2014-06-03 | 2018-02-21 | 東京エレクトロン株式会社 | 剥離装置、剥離システム、剥離方法、プログラム及びコンピュータ記憶媒体 |
| JP6353373B2 (ja) * | 2015-01-16 | 2018-07-04 | 東京エレクトロン株式会社 | 接合装置、接合システムおよび接合方法 |
| JP6470088B2 (ja) * | 2015-04-02 | 2019-02-13 | ファスフォードテクノロジ株式会社 | ボンディング装置及びボンディング方法 |
| JP6643834B2 (ja) * | 2015-09-02 | 2020-02-12 | キヤノン株式会社 | ディストーション検出方法、露光装置、露光方法、およびデバイス製造方法 |
| US9466538B1 (en) * | 2015-11-25 | 2016-10-11 | Globalfoundries Inc. | Method to achieve ultra-high chip-to-chip alignment accuracy for wafer-to-wafer bonding process |
| TWI581454B (zh) * | 2016-01-04 | 2017-05-01 | 錼創科技股份有限公司 | 半導體發光元件 |
| WO2017168531A1 (ja) * | 2016-03-28 | 2017-10-05 | 株式会社ニコン | 基板貼り合わせ装置および基板貼り合わせ方法 |
| JP6731805B2 (ja) * | 2016-07-12 | 2020-07-29 | 東京エレクトロン株式会社 | 接合システム |
| JP6727048B2 (ja) * | 2016-07-12 | 2020-07-22 | 東京エレクトロン株式会社 | 基板搬送装置および接合システム |
| JP6835345B2 (ja) | 2016-07-13 | 2021-02-24 | 大協薬品工業株式会社 | プラスター製剤及びその製造法 |
-
2019
- 2019-01-09 TW TW108100795A patent/TWI782169B/zh active
- 2019-01-09 TW TW111137781A patent/TWI823598B/zh active
- 2019-01-11 WO PCT/JP2019/000637 patent/WO2019146427A1/ja unknown
- 2019-01-11 CN CN202411030514.1A patent/CN118762983A/zh active Pending
- 2019-01-11 JP JP2019566995A patent/JP6764040B2/ja active Active
- 2019-01-11 KR KR1020247031875A patent/KR20240144492A/ko active Application Filing
- 2019-01-11 KR KR1020207023886A patent/KR102711309B1/ko active IP Right Grant
- 2019-01-11 US US16/964,070 patent/US11817338B2/en active Active
- 2019-01-11 EP EP19743451.7A patent/EP3742474B1/en active Active
- 2019-01-11 CN CN201980008859.8A patent/CN111630627B/zh active Active
- 2019-01-11 EP EP23191583.6A patent/EP4250342A3/en active Pending
-
2020
- 2020-09-10 JP JP2020151893A patent/JP6952853B2/ja active Active
-
2021
- 2021-09-28 JP JP2021157455A patent/JP7150118B2/ja active Active
-
2023
- 2023-10-04 US US18/480,745 patent/US20240047257A1/en active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015038982A (ja) * | 2013-07-18 | 2015-02-26 | Nskテクノロジー株式会社 | 基板の保持装置及び密着露光装置並びに近接露光装置 |
| WO2017155002A1 (ja) | 2016-03-11 | 2017-09-14 | ボンドテック株式会社 | 基板接合方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6952853B2 (ja) | 2021-10-27 |
| TWI823598B (zh) | 2023-11-21 |
| EP3742474A1 (en) | 2020-11-25 |
| CN111630627A (zh) | 2020-09-04 |
| EP3742474B1 (en) | 2024-01-03 |
| US11817338B2 (en) | 2023-11-14 |
| JP6764040B2 (ja) | 2020-09-30 |
| JP7150118B2 (ja) | 2022-10-07 |
| KR20200108892A (ko) | 2020-09-21 |
| US20210050243A1 (en) | 2021-02-18 |
| JPWO2019146427A1 (ja) | 2020-07-30 |
| TW201933427A (zh) | 2019-08-16 |
| US20240047257A1 (en) | 2024-02-08 |
| EP3742474A4 (en) | 2021-10-13 |
| EP3742474C0 (en) | 2024-01-03 |
| EP4250342A3 (en) | 2024-01-17 |
| KR20240144492A (ko) | 2024-10-02 |
| TWI782169B (zh) | 2022-11-01 |
| TW202303695A (zh) | 2023-01-16 |
| WO2019146427A1 (ja) | 2019-08-01 |
| JP2022000919A (ja) | 2022-01-04 |
| CN111630627B (zh) | 2024-08-16 |
| CN118762983A (zh) | 2024-10-11 |
| EP4250342A2 (en) | 2023-09-27 |
| JP2020202398A (ja) | 2020-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102711309B1 (ko) | 접합 시스템 및 접합 방법 | |
| JP6082453B2 (ja) | プローブカードのプリヒート方法 | |
| US8899289B2 (en) | Joint method, joint apparatus and joint system | |
| CN108807193B (zh) | 接合装置以及接合方法 | |
| US20130153116A1 (en) | Joint system, substrate processing system, and joint method | |
| US20130062013A1 (en) | Joint apparatus, joint system, and joint method | |
| US8819923B2 (en) | Joint apparatus | |
| JP2016134459A (ja) | 接合装置、接合システムおよび接合方法 | |
| JP6345605B2 (ja) | 接合装置、接合システムおよび接合方法 | |
| JP2014027118A (ja) | 接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体 | |
| JP5781988B2 (ja) | 接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体 | |
| KR20160086271A (ko) | 접합 장치, 접합 시스템, 접합 방법, 및 컴퓨터 기억 매체 | |
| JP7105956B2 (ja) | 接合装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AMND | Amendment | ||
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application | ||
| X091 | Application refused [patent] | ||
| A107 | Divisional application of patent | ||
| GRNT | Written decision to grant |