KR101664043B1 - 교통정보 제공시스템 및 그 방법 - Google Patents
교통정보 제공시스템 및 그 방법 Download PDFInfo
- Publication number
- KR101664043B1 KR101664043B1 KR1020140179662A KR20140179662A KR101664043B1 KR 101664043 B1 KR101664043 B1 KR 101664043B1 KR 1020140179662 A KR1020140179662 A KR 1020140179662A KR 20140179662 A KR20140179662 A KR 20140179662A KR 101664043 B1 KR101664043 B1 KR 101664043B1
- Authority
- KR
- South Korea
- Prior art keywords
- traffic information
- target speed
- vehicle
- traffic
- section
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 28
- 230000001133 acceleration Effects 0.000 claims abstract description 35
- 230000002093 peripheral effect Effects 0.000 claims description 3
- 239000000446 fuel Substances 0.000 description 12
- 230000005540 biological transmission Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 239000000470 constituent Substances 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000000593 degrading effect Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 239000000523 sample Substances 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096708—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control
- G08G1/096725—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control where the received information generates an automatic action on the vehicle control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K31/0058—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator responsive to externally generated signalling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/143—Speed control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/40—Business processes related to the transportation industry
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0112—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from the vehicle, e.g. floating car data [FCD]
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/012—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from other sources than vehicle or roadside beacons, e.g. mobile networks
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0129—Traffic data processing for creating historical data or processing based on historical data
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0133—Traffic data processing for classifying traffic situation
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G08G1/0141—Measuring and analyzing of parameters relative to traffic conditions for specific applications for traffic information dissemination
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G08G1/0145—Measuring and analyzing of parameters relative to traffic conditions for specific applications for active traffic flow control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/091—Traffic information broadcasting
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096733—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place
- G08G1/096741—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place where the source of the transmitted information selects which information to transmit to each vehicle
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096766—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission
- G08G1/096775—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission where the origin of the information is a central station
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/003—Maps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0638—Engine speed
- B60W2510/0647—Coasting condition
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/55—External transmission of data to or from the vehicle using telemetry
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Life Sciences & Earth Sciences (AREA)
- Atmospheric Sciences (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Theoretical Computer Science (AREA)
- Business, Economics & Management (AREA)
- Combustion & Propulsion (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Multimedia (AREA)
- Mathematical Physics (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Health & Medical Sciences (AREA)
- Economics (AREA)
- General Health & Medical Sciences (AREA)
- Human Resources & Organizations (AREA)
- Marketing (AREA)
- Primary Health Care (AREA)
- Strategic Management (AREA)
- Tourism & Hospitality (AREA)
- General Business, Economics & Management (AREA)
- Traffic Control Systems (AREA)
Abstract
교통정보 제공시스템 및 그 방법에 관한 것이다.
교통정보 제공시스템은, 교통흐름과 관련된 정보를 수집하는 교통정보 수집부, 상기 교통흐름과 관련된 정보를 토대로 도로에서 평균 주행 속도가 변하는 변속점을 검출하고, 상기 변속점의 위치정보와 상기 변속점을 통과한 후의 목표속도를 포함하는 교통정보를 생성하는 교통정보 생성부, 그리고 상기 목표속도를 토대로 차량의 가감속이 자동 제어되도록, 상기 교통정보를 상기 차량의 제어기로 전송하는 교통정보 제공부를 포함할 수 있다.
교통정보 제공시스템은, 교통흐름과 관련된 정보를 수집하는 교통정보 수집부, 상기 교통흐름과 관련된 정보를 토대로 도로에서 평균 주행 속도가 변하는 변속점을 검출하고, 상기 변속점의 위치정보와 상기 변속점을 통과한 후의 목표속도를 포함하는 교통정보를 생성하는 교통정보 생성부, 그리고 상기 목표속도를 토대로 차량의 가감속이 자동 제어되도록, 상기 교통정보를 상기 차량의 제어기로 전송하는 교통정보 제공부를 포함할 수 있다.
Description
본 발명은 교통정보 제공시스템 및 그 방법에 관한 것이다.
최근 차량의 상품성을 판단하는 기준으로 안전 주행과 연비의 중요성이 강조되고 있다.
한편, 차량의 급가감속은 차량의 연비를 떨어뜨릴 뿐만 아니라 안전 운전을 저해하는 요소로도 작용한다.
최근 차량에 거리 센서 등을 장착하여, 전방 차량과 충분한 거리를 확보하도록 지원함으로써, 차량의 급가감속 상황이 발생하는 것을 방지하기 위한 기술들의 연구가 활발하다. 그러나, 차량에 장착되는 센서는 근거리 인지만 가능하여, 전방 20m 이상의 교통 상황을 인지하는 것이 어려우며, 이로 인해 전방에 교통 상황을 인식하여 차량의 가감속을 지원하는데 한계가 있다.
본 발명의 실시 예를 통해 해결하려는 과제는, 차량의 연비 개선과 안전 운전을 지원하는 교통정보 제공시스템 및 그 방법을 제공하는 것이다.
상기 과제를 해결하기 위한 본 발명의 일 실시 예에 따른 교통정보 제공시스템은, 교통흐름과 관련된 정보를 수집하는 교통정보 수집부, 상기 교통흐름과 관련된 정보를 토대로 도로에서 평균 주행 속도가 변하는 변속점을 검출하고, 상기 변속점의 위치정보와 상기 변속점을 통과한 후의 목표속도를 포함하는 교통정보를 생성하는 교통정보 생성부, 그리고 상기 목표속도를 토대로 차량의 가감속이 자동 제어되도록, 상기 교통정보를 상기 차량의 제어기로 전송하는 교통정보 제공부를 포함할 수 있다.
또한, 본 발명의 일 실시 예에 따른 교통정보 제공시스템의 교통정보 제공방법은, 교통흐름과 관련된 정보를 수집하는 단계, 상기 교통흐름과 관련된 정보를 토대로 도로에서 평균 주행 속도가 변하는 변속점을 검출하는 단계, 상기 변속점의 위치정보와 상기 변속점을 통과한 후의 목표속도를 포함하는 교통정보를 생성하는 단계, 그리고 상기 목표속도를 토대로 차량의 가감속이 자동 제어되도록, 상기 교통정보를 상기 차량의 제어기로 전송하는 단계를 포함할 수 있다.
본 발명의 실시 예들에 따르면, 교통정보 제공시스템은 차량 주변 도로의 각 구간에 대해 목표속도와, 목표속도에 도달하기까지의 최적 시간을 차량에 제공함으로써, 차량의 연비 개선과 안전운전을 지원할 수 있다.
도 1은 본 발명의 일 실시 예에 따른 교통정보 제공 서비스 망을 개략적으로 도시한 것이다.
도 2는 본 발명의 일 실시 예에 따른 교통정보 제공시스템을 개략적으로 도시한 구조도이다.
도 3은 본 발명의 일 실시 예에 따른 교통정보 데이터구조의 일 예를 도시한 것이다.
도 4는 본 발명의 일 실시 예에 따른 교통정보의 일 예를 도시한 것이다.
도 5는 본 발명의 일 실시 예에 따른 교통정보 제공시스템에서 변속점을 검출하는 일 예를 설명하기 위한 도면이다.
도 6은 본 발명의 일 실시 예에 따른 교통정보 제공방법을 도시한 흐름도이다.
도 7은 본 발명의 일 실시 예에 따른 교통정보 제공방법의 효과를 설명하기 위한 도면이다.
도 2는 본 발명의 일 실시 예에 따른 교통정보 제공시스템을 개략적으로 도시한 구조도이다.
도 3은 본 발명의 일 실시 예에 따른 교통정보 데이터구조의 일 예를 도시한 것이다.
도 4는 본 발명의 일 실시 예에 따른 교통정보의 일 예를 도시한 것이다.
도 5는 본 발명의 일 실시 예에 따른 교통정보 제공시스템에서 변속점을 검출하는 일 예를 설명하기 위한 도면이다.
도 6은 본 발명의 일 실시 예에 따른 교통정보 제공방법을 도시한 흐름도이다.
도 7은 본 발명의 일 실시 예에 따른 교통정보 제공방법의 효과를 설명하기 위한 도면이다.
이하, 첨부한 도면을 참고로 하여 본 발명의 실시 예들에 대하여 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자가 용이하게 실시할 수 있도록 상세히 설명한다. 본 발명은 여러 가지 상이한 형태로 구현될 수 있으며 여기에서 설명하는 실시 예들에 한정되지 않는다.
본 발명의 실시 예를 명확하게 설명하기 위해서 설명과 관계없는 부분은 생략하였으며, 명세서 전체를 통하여 동일 또는 유사한 구성요소에 대해서는 동일한 참조 부호를 붙이도록 한다.
명세서 전체에서, 어떤 부분이 다른 부분과 "연결"되어 있다고 할 때, 이는 "직접적으로 연결"되어 있는 경우뿐 아니라, 그 중간에 다른 소자를 사이에 두고 "전기적으로 연결"되어 있는 경우도 포함한다. 또한 어떤 부분이 어떤 구성요소를 "포함"한다고 할 때, 이는 특별히 반대되는 기재가 없는 한 다른 구성요소를 제외하는 것이 아니라 다른 구성요소를 더 포함할 수 있는 것을 의미한다.
이하, 필요한 도면들을 참조하여 본 발명의 일 실시 예에 따른 교통정보 제공시스템 및 그 방법에 대해 설명하기로 한다.
도 1은 본 발명의 일 실시 예에 따른 교통정보 제공 서비스 망을 개략적으로 도시한 것이다. 도 2는 본 발명의 일 실시 예에 따른 교통정보 제공시스템을 개략적으로 도시한 구조도이다. 도 3은 본 발명의 일 실시 예에 따른 교통정보 데이터구조의 일 예를 도시한 것이다. 도 4는 본 발명의 일 실시 예에 따른 교통정보의 일 예를 도시한 것이다. 도 5는 본 발명의 일 실시 예에 따른 교통정보 제공시스템에서 변속점을 검출하는 일 예를 설명하기 위한 도면이다.
도 1을 참조하면, 교통정보 제공시스템(10)은 교통정보 수집단말(20)을 통해 각 도로의 교통흐름과 관련된 정보를 수집한다.
각 도로의 교통흐름과 관련된 정보는, 각 도로를 주행 중인 차량들의 위치정보를 포함할 수 있다.
교통정보 수집단말(20)은 GPS(Global Positioning System) 정보 등 도로를 주행 중인 차량의 위치정보를 획득하며, 무선 통신망을 통해 이를 교통정보 제공시스템(10)으로 제공한다. 교통정보 수집단말(20)은, 교통정보를 수집하는 프로브 차량에 탑재된 단말이거나, 내비게이션, 스마트폰 등 차량에 위치하는 이동 단말을 포함할 수 있다.
교통정보 제공시스템(10)은 무선 통신망을 통해 연결되는 교통정보 수집단말(20)들로부터 각 도로의 교통흐름과 관련된 정보를 수집한다. 또한, 각 교통정보 수집단말(20)로부터 수집한 정보와 각 도로의 지도 데이터를 토대로 교통정보를 생성하고, 이를 차량 제어기(30)으로 제공한다.
도 2를 참조하면, 교통정보 제공시스템(10)은 교통정보 수집부(110), 교통정보 필터링부(130), 교통정보 제공부(130), 저장소(140) 등을 포함할 수 있다.
교통정보 수집부(110)는 무선 통신망을 통해 교통정보 수집단말(20)들과 연결하며, 교통정보 수집단말(20)들로부터 각 도로의 교통흐름과 관련된 정보를 주기적으로 수집할 수 있다. 즉, 교통정보 수집단말(20)로부터 각 도로 위를 주행 중인 차량들의 위치정보를 주기적으로 수집할 수 있다.
교통정보 생성부(120)는, 교통정보 수집부(110)를 통해 수집되는 정보들과, 지도데이터를 분석하여 교통정보를 생성할 수 있다.
교통정보는, 단위 도로 별로 구분되어 생성되며, 각 단위 도로의 평균 주행속도와 차량 제어를 위한 참조데이터를 포함할 수 있다.
도 3 및 도 4를 예로 들면, 교통정보 생성부(120)에서 생성되는 교통정보는, 각 도로를 식별하기 위한 도로 아이디(ID), 각 도로에서의 평균 주행 속도를 포함할 수 있다. 또한, 각 도로에서의 차량 제어를 위한 참조 데이터로, 각 도로에서의 변속점 정보, 각 주행 구간의 목표속도 및 목표속도까지의 도달시간, 타력 주행이 가능한 구간의 위치정보를 포함하는 타력 주행 정보 등을 포함할 수 있다.
변속점은, 도 5에 도시된 바와 같이, 도로에서 평균 주행 속도가 임계치 이상 변하는 지점(v1, v2) 또는 평균 가속도가 변화하는 지점(v1, v2)을 나타낸다.
교통정보 생성부(120)는 교통정보 수집단말(20)을 통해 수신되는 차량들의 위치정보를 토대로, 각 차량의 이동 궤적을 분석하고, 분석 결과를 토대로 각 도로에서의 변속점을 검출할 수 있다. 한편, 변속점을 검출하는 과정에서, 교통정보 생성부(120)는 각 구간의 평균 주행 속도를 기 설정된 값 이상 벗어나는 과속 차량의 정보를 제거하는 필터링 과정을 수행함으로써, 불필요한 과속 정보를 제거할 수 있다.
교통정보 생성부(120)는 각 도로에서 변속점이 검출되면, 검출된 변속점의 변속점 정보를 생성할 수 있다.
변속점 정보는, 변속점 시퀀스, 변속점 위치정보 등을 포함할 수 있다. 즉, 변속점 정보는, 각 도로 위에서의 변속점이 몇 번째 변속점인지를 나타내는 변속점 시퀀스와, 각 변속점의 위치정보를 포함할 수 있다. 여기서, 각 변속점의 위치정보는, 각 변속점에 대응하는 GPS 정보, 각 도로의 시작점으로부터 해당 변속점까지의 거리 등으로 나타낼 수 있다. 도 4를 예로 들면, 도로 ID가 '10111'인 도로의 1번째 변속점이 도로 시작점으로부터 200m 이후에 위치할 수 있다.
교통정보 생성부(120)는 변속점이 검출되면, 교통정보 수집단말로부터 수집한 정보를 토대로, 단위 도로를 변속점이 기준이 되는 복수의 주행 구간으로 구분할 수 있다.
주행 구간은, 해당 구간을 주행 중인 차량들의 주행 패턴(속도 또는 가속도 패턴)에 따라서 구분되며, 연속되는 두 개의 변속점을 각각 시작점과 끝점으로 할 수 있다. 주행 구간은, 해당 구간에서의 주행 패턴에 따라서 가속 주행 구간, 정속 주행 구간, 감속 주행 구간, 정체 구간, 정차 구간 등으로 구분될 수 있다. 도 5를 예로 들면, 가속 주행 구간은 속도가 점차적으로 증가하는 주행 구간, 정속 주행 구간은 등속으로 주행하는 구간, 감속 주행 구간은 속도를 점차적으로 감속하는 주행 구간을 나타낸다.
교통정보 생성부(120)는 변속점을 토대로 주행 구간이 결정되면, 각 주행 구간에 대해 목표속도와 목표속도까지의 도달시간을 생성할 수 있다.
각 주행 구간에서의 목표속도는, 변속점(각 주행 구간의 시작점)을 통과한 이후 도달하게 되는 속도로서, 변속점 통과 후 정속 주행을 하기 위해 도달하는 속도에 대응될 수 있다. 또한, 목표속도까지의 도달시간은, 목표속도에 도달하기까지의 최적의 시간을 나타낼 수 있다.
가속 주행 구간의 경우, 목표속도는 가속이 완료된 후의 정속 주행 속도일 수 있다. 예를 들어, 가속 주행 구간 이후에 이어지는 정속 주행 구간에서의 평균 주행 속도가 100km/h인 경우, 가속 주행 구간에서의 목표속도는 이어지는 정속 주행 구간에서의 평균 주행 속도, 즉 100km/h일 수 있다.
가속 주행 구간의 경우, 목표속도까지의 도달시간은 목표속도에 도달하기까지의 최적 시간으로, 연비 소모를 최소화하면서 목표속도에 도달하기 위한 시간일 수 있다. 일반적으로, 차량이 어느 정도의 힘을 어느 정도의 시간 동안 제공하는지가 연료 소모량을 결정하며, 급가속 및 급감속은 상대적으로 많은 연료 소모를 초래하게 된다. 따라서, 교통정보 생성부(120)는 변속점을 통과한 후의 구간이 가속 주행 구간인 경우, 가속도가 임계치 이상인 급가속 대신 점차적인 가속을 통해 목표속도에 도달하기 위한 가속시간을 목표속도까지의 도달시간으로 산출할 수 있다.
정속 주행 구간의 경우, 목표속도는 정속 주행 구간에서의 평균 주행 속도일 수 있다.
감속 주행 구간의 경우, 목표속도는 감속이 완료된 후의 정속 주행 속도이거나, 정체/정차 구간에서의 주행 속도일 수 있다. 예를 들어, 30km/h인 정체 구간으로 진입하기 위한 감속 주행 구간의 경우, 이어지는 정체 구간에서의 주행 속도, 즉 30km/h가 목표속도일 수 있다.
감속 주행 구간의 경우, 목표속도까지의 도달시간은, 점차적인 감속 또는 타력 주행을 통해 목표속도에 도달하기까지의 시간을 나타낸다. 감속 주행 구간의 경우, 차량의 안전 주행을 위해 뒤에 이어지는 정속 주행 구간 또는 정체/정차 구간의 시작 지점에 도달하기 이전에 목표속도에 도달할 필요가 있다. 따라서, 감속 주행 구간의 경우, 점차적인 감속 또는 타력 주행을 통해 목표속도에 도달하기 위한 감속 거리를 충분히 확보하도록 도달시간이 설정될 필요가 있다. 예를 들어, 100km/h에서 30km/h로 감속하는 감속 주행 구간의 경우, 30km/h의 속도로 주행하는 정체 구간이 시작되기 이전에 주행 속도를 100km/h에서 30km/h로 70km/h를 줄일 필요가 있으며, 70km/h를 줄이는데 필요한 감속 거리 확보에 필요한 시간이 목표속도까지의 도달시간이 될 수 있다.
한편, 주행 속도 기반 안전거리를 법규에서 지정하고 있는 경우, 감속 주행 구간에서의 목표속도까지의 도달시간은, 목표속도에 대응하는 안전 거리를 만족시키도록 설정될 수 있다.
타력 주행 정보는, 연료 컷(fuel cut)을 통해 연료를 공급하지 않은 상태에서 주행이 가능한 구간의 위치정보를 포함할 수 있다.
교통정보 생성부(120)는 평균 주행 속도 및 지도 데이터를 토대로, 타력 주행이 가능한 구간을 검출할 수 있다. 예를 들어, 지도 데이터 상에서 내리막에 해당하는 구간이 정속 주행 구간인 경우, 교통정보 생성부(120)는 해당 구간을 타력 주행 구간으로 검출할 수 있다. 또한, 예를 들어, 감속 주행 구간을 타력 주행 구간으로 검출할 수도 있다.
교통정보 생성부(120)는 전술한 바와 같이 교통정보가 생성되면, 생성된 교통정보를 단위도로 또는 주행 구간별로 구분하여 저장소(140)에 저장할 수 있다.
교통정보 제공부(130)는, 차량 제어기(30)로부터 교통정보 제공이 요청되면, 차량 제어기(30)가 탑재된 차량의 현재 위치를 토대로, 주변 교통정보를 제공할 수 있다.
이를 위해, 교통정보 제공부(130)는 차량 제어기(30)로부터 자신의 현재 위치를 주기적으로 수신한다. 또한, 교통정보 제공부(130)는 차량 제어기(30)로부터 수신된 차량 제어기(30)의 현재 위치를 토대로, 저장소(140)에 저장된 교통정보들 중 차량 제어기(30)가 탑재된 차량의 주변 도로 또는 주변 주행 구간에 대응되는 주변 교통정보를 읽어온다. 그리고, 이를 무선 통신망을 통해 차량 제어기(30)로 전송한다. 예를 들어, 교통정보 제공부(130)는 차량 제어기(30)의 현재 위치가 수신되면, 수신된 위치로부터 반경 2km에 포함되는 도로 또는 주행 구간의 교통정보를 저장소(140)로부터 읽어와 차량 제어기(30)로 전달할 수 있다.
차량 제어기(30)는 교통정보 수신을 위해 자신의 현재 위치에 대응하는 위치정보를 교통정보 제공시스템(10)으로 주기적으로 전송한다. 그리고, 교통정보 제공시스템(10)으로부터 자신 주변 도로의 교통정보를 수신하면, 이를 토대로 차량의 파워트레인을 자동 제어할 수 있다.
예를 들어, 차량 제어기(30)는, 교통정보 제공시스템(10)으로부터 전방의 가속 주행 구간에 대한 교통정보를 수신하면, 차량의 가감속 특성을 토대로 차량의 현재 속도에서 교통정보에 포함된 목표속도까지 교통정보에 포함된 도달시간 내에 도달하기 위한 가속도를 산출한다. 또한, 산출한 가속도로 가속이 이루어지도록 차량의 파워트레인을 제어할 수 있다.
또한, 예를 들어, 차량 제어기(30)는 교통정보 제공시스템(10)으로부터 전방의 정속 주행 구간에 대한 교통정보를 수신하면, 교통정보에 포함된 목표속도로 정속 주행이 이루어지도록 차량의 파워트레인을 제어할 수 있다.
또한, 예를 들어, 차량 제어기(30)는 교통정보 제공시스템(10)으로부터 전방의 감속 주행 구간에 대한 교통정보를 수신하면, 차량의 가감속 특성을 토대로 차량의 현재 속도에서 교통정보에 포함된 목표속도까지 교통정보에 포함된 도달시간 내에 도달하기 위한 가속도를 산출한다. 또한, 산출한 가속도로 감속이 이루어지도록 차량의 파워트레인을 제어할 수 있다.
또한, 예를 들어, 차량 제어기(30)는 교통정보 제공시스템(10)으로부터 전방 도로의 타력 주행 구간에 대한 정보를 포함하는 교통정보를 수신하면, 해당 구간에서 연료컷(fuel cut)을 통해 타력 주행이 이루어지도록 차량의 파워트레인을 제어할 수 있다.
도 6은 본 발명의 일 실시 예에 따른 교통정보 제공방법을 도시한 흐름도이다. 도 7은 본 발명의 일 실시 예에 따른 교통정보 제공방법의 효과를 설명하기 위한 도면이다.
도 6을 참조하면, 교통정보 수집단말(20)은 각 도로의 교통흐름과 관련된 정보를 수집하여 주기적으로 교통정보 제공시스템(10)으로 전송한다(S100).
상기 S100 단계에서, 교통흐름과 관련된 정보는 교통정보 수집단말(20)의 현재 위치 즉, 교통정보 수집단말(20)이 탑재된 차량의 현재 위치에 대응하는 위치정보를 포함할 수 있다.
교통정보 제공시스템(10)은 교통정보 수집단말(20)들로부터 각 도로의 교통흐름과 관련된 정보를 주기적으로 수신하며, 수신된 정보들을 이용하여 교통정보를 생성한다(S110).
상기 S110 단계에서, 교통정보는, 단위 도로 별로 구분되어 생성되며, 각 단위 도로의 식별정보(도로 아이디(ID)), 각 도로에서의 평균 주행 속도, 각 도로에서의 변속점 정보, 각 주행 구간의 목표속도 및 목표속도까지의 도달시간, 타력 주행이 가능한 구간의 위치정보를 포함하는 타력 주행 정보 등을 포함할 수 있다.
교통정보 제공시스템(10)은 차량 제어기(30)로부터 주기적으로 차량의 현재위치를 포함하는 위치정보를 수신한다(S120). 또한, 상기 S120 단계를 통해 수신되는 위치정보를 토대로, 차량 제어기(30)가 탑재된 차량의 주변 교통정보를 차량 제어기(30)로 전달한다(S130).
상기 S130 단계에서, 교통정보 제공시스템(10)은 전송 데이터 용량을 최소화하기 위해 차량 제어기(30)로부터 수신된 차량 제어기(30)의 현재 위치를 토대로, 기 생성된 교통정보들 중 차량 제어기(30)가 탑재된 차량의 주변 도로 또는 주변 주행 구간에 대응되는 교통정보만을 선택하여 차량 제어기(30)로 전송할 수 있다.
교통정보 제공시스템(10)으로부터 주변 교통정보를 수신한 차량 제어기(30)는, 이를 토대로 차량의 파워트레인을 제어한다(S140).
전술한 바에 따르면, 교통정보 제공시스템(10)은 도로의 교통흐름을 반영하여 각 주행 구간에서의 목표속도와 목표속도까지의 도달시간을 설정하고, 이를 포함하는 교통정보를 차량 제어기(30)로 전달한다. 이에 따라, 차량 제어기(30)는 전방 도로의 교통흐름에 따라서 미리 적절한 가속 또는 감속을 수행할 수 있어, 급가속 및 급감속을 피할 수 있으므로, 연비가 개선될 뿐만 아니라 안전 운전이 가능한 효과가 있다.
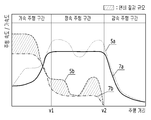
도 7은 종래 운전자의 판단에 의존하여 차량의 파워트레인을 제어하는 경우의 주행속도(5a) 및 이에 따른 차량 구동력(5b)과, 본 발명의 실시 예에 따른 교통정보 제공시스템(10)에서 제공하는 교통정보를 토대로 차량의 파워트레인을 제어하는 경우의 주행속도(7a) 및 이에 따른 차량 구동력(7b)를 비교하여 도시한 것이다.
도 7을 참조하면, 교통정보 제공시스템(10)에서 제공하는 교통정보를 토대로 차량의 파워트레인을 제어하는 경우, 차량은 전방 도로에서의 목표 속도를 미리 파악하고, 이를 토대로 차량의 가감속을 적절하게 제어함으로써 불필요한 가속 또는 감속이 발생하지 않게 된다. 따라서, 불필요한 연료 소비 또한 개선되어 연비가 개선되는 효과가 있다.
본 발명의 실시 예에 의한 교통정보 제공방법은 소프트웨어를 통해 실행될 수 있다. 소프트웨어로 실행될 때, 본 발명의 구성 수단들은 필요한 작업을 실행하는 코드 세그먼트들이다. 프로그램 또는 코드 세그먼트들은 프로세서 판독 기능 매체에 저장되거나 전송 매체 또는 통신망에서 반송파와 결합된 컴퓨터 데이터 신호에 의하여 전송될 수 있다.
컴퓨터가 읽을 수 있는 기록매체는 컴퓨터 시스템에 의하여 읽혀질 수 있는 데이터가 저장되는 모든 종류의 기록 장치를 포함한다. 컴퓨터가 읽을 수 있는 기록 장치의 예로는, ROM, RAM, CD-ROM, DVD_ROM, DVD_RAM, 자기 테이프, 플로피 디스크, 하드 디스크, 광 데이터 저장장치 등이 있다. 또한, 컴퓨터로 읽을 수 있는 기록매체는 네트워크로 연결된 컴퓨터 장치에 분산되어 분산방식으로 컴퓨터가 읽을 수 있는 코드가 저장되고 실행될 수 있다.
지금까지 참조한 도면과 기재된 발명의 상세한 설명은 단지 본 발명의 예시적인 것으로서, 이는 단지 본 발명을 설명하기 위한 목적에서 사용된 것이지 의미 한정이나 특허청구범위에 기재된 본 발명의 범위를 제한하기 위하여 사용된 것은 아니다. 그러므로 본 기술 분야의 통상의 지식을 가진 자라면 이로부터 용이하게 선택하여 대체할 수 있다. 또한 당업자는 본 명세서에서 설명된 구성요소 중 일부를 성능의 열화 없이 생략하거나 성능을 개선하기 위해 구성요소를 추가할 수 있다. 뿐만 아니라, 당업자는 공정 환경이나 장비에 따라 본 명세서에서 설명한 방법 단계의 순서를 변경할 수도 있다. 따라서 본 발명의 범위는 설명된 실시형태가 아니라 특허청구범위 및 그 균등물에 의해 결정되어야 한다.
Claims (15)
- 교통흐름과 관련된 정보를 수집하는 교통정보 수집부,
상기 교통흐름과 관련된 정보를 토대로 도로에서 평균 주행 속도가 변하는 변속점을 검출하고, 상기 변속점을 기준으로 상기 도로를 복수의 주행 구간으로 구분하며, 각 주행 구간에 대해 상기 변속점의 위치정보, 상기 변속점을 통과한 후의 목표속도 및 상기 목표속도까지의 도달시간을 포함하는 교통정보를 생성하는 교통정보 생성부, 그리고
상기 목표속도 및 상기 목표속도까지의 도달시간을 토대로 차량의 가감속이 자동 제어되도록, 상기 교통정보를 상기 차량의 제어기로 전송하는 교통정보 제공부를 포함하며,
상기 교통정보 생성부는 상기 복수의 주행 구간 중 감속 주행 구간에 대해서는, 기 설정된 주행 속도 기반 안전거리를 토대로 상기 목표속도에 대응하는 안전거리를 산출하고, 상기 목표속도에 대응하는 안전거리를 만족시키도록 상기 목표속도까지의 도달시간을 산출하는 교통정보 제공시스템.
- 제1항에 있어서,
상기 교통정보 생성부는,
상기 변속점을 통과한 후의 정속 주행 구간에서의 평균 주행 속도를 토대로 상기 목표속도를 산출하는 교통정보 제공시스템.
- 삭제
- 제1항에 있어서,
상기 교통정보 생성부는,
상기 복수의 주행 구간 중 가속 주행 구간에 대해, 급가속 없이 상기 목표속도에 도달하기 위한 가속시간을 상기 도달시간으로 산출하는 교통정보 제공시스템.
- 삭제
- 제1항에 있어서,
상기 교통정보 생성부는,
상기 교통흐름과 관련된 정보와 지도데이터를 토대로 타력 주행이 가능한 구간을 검출하며, 상기 타력 주행이 가능한 구간의 위치정보를 포함하도록 상기 교통정보를 생성하는 교통정보 제공시스템.
- 제1항에 있어서,
상기 교통정보 제공부는,
상기 제어기로부터 상기 차량의 현재 위치를 수신하며,
상기 차량의 현재 위치를 토대로 선택된 주변 도로에 대해, 상기 교통정보를 상기 제어기로 전송하는 교통정보 제공시스템.
- 교통정보 제공시스템의 교통정보 제공방법에 있어서,
교통흐름과 관련된 정보를 수집하는 단계,
상기 교통흐름과 관련된 정보를 토대로 도로에서 평균 주행 속도가 변하는 변속점을 검출하는 단계,
상기 변속점을 기준으로 상기 도로를 복수의 주행 구간으로 구분하는 단계,
각 주행 구간에 대해 상기 변속점의 위치정보, 상기 변속점을 통과한 후의 목표속도 및 상기 목표속도까지의 도달시간을 포함하는 교통정보를 생성하는 단계, 그리고
상기 목표속도 및 상기 목표속도까지의 도달시간을 토대로 차량의 가감속이 자동 제어되도록, 상기 교통정보를 상기 차량의 제어기로 전송하는 단계를 포함하며,
상기 교통정보를 생성하는 단계는,
상기 복수의 주행 구간 중 감속 주행 구간에 대해서는, 기 설정된 주행 속도 기반 안전거리를 토대로 상기 목표속도에 대응하는 안전거리를 산출하는 단계, 그리고
상기 감속 주행 구간에 대해서는, 상기 목표속도에 대응하는 안전거리를 만족시키도록 상기 목표속도까지의 도달시간을 산출하는 단계
를 포함하는 교통정보 제공방법.
- 제8항에 있어서,
상기 변속점을 통과한 후의 정속 주행 구간에서의 평균 주행 속도를 토대로 상기 목표속도를 산출하는 단계를 더 포함하는 교통정보 제공방법.
- 삭제
- 제8항에 있어서,
상기 교통정보를 생성하는 단계는,
상기 복수의 주행 구간 중 가속 주행 구간에 대해서는, 급가속 없이 상기 목표속도에 도달하기 위한 가속시간을 상기 도달시간으로 산출하는 단계를 더 포함하는 교통정보 제공방법.
- 삭제
- 제8항에 있어서,
상기 교통흐름과 관련된 정보와 지도데이터를 토대로 타력 주행이 가능한 구간을 검출하는 단계를 더 포함하며,
상기 교통정보는, 상기 타력 주행이 가능한 구간의 위치정보를 더 포함하는 교통정보 제공방법.
- 제8항에 있어서,
상기 제어기로부터 상기 차량의 현재 위치를 수신하는 단계를 더 포함하며,
상기 전송하는 단계는,
상기 차량의 현재 위치를 토대로 선택된 주변 도로에 대해, 상기 교통정보를 상기 제어기로 전송하는 단계인 교통정보 제공방법.
- 제8항, 제9항, 제11항, 제13항 및 제14항 중 어느 한 항의 방법을 실행시키기 위해 기록매체에 저장된 프로그램.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140179662A KR101664043B1 (ko) | 2014-12-12 | 2014-12-12 | 교통정보 제공시스템 및 그 방법 |
| US14/810,133 US9679483B2 (en) | 2014-12-12 | 2015-07-27 | System and method for providing traffic information |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140179662A KR101664043B1 (ko) | 2014-12-12 | 2014-12-12 | 교통정보 제공시스템 및 그 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20160071903A KR20160071903A (ko) | 2016-06-22 |
| KR101664043B1 true KR101664043B1 (ko) | 2016-10-10 |
Family
ID=56111733
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020140179662A KR101664043B1 (ko) | 2014-12-12 | 2014-12-12 | 교통정보 제공시스템 및 그 방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9679483B2 (ko) |
| KR (1) | KR101664043B1 (ko) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10303176B2 (en) * | 2015-10-15 | 2019-05-28 | Ford Global Technologies, Llc | Determining variance factors for complex road segments |
| DE102016009763A1 (de) * | 2016-08-11 | 2018-02-15 | Trw Automotive Gmbh | Steuerungssystem und Steuerungsverfahren zum Bestimmen einer Trajektorie und zum Erzeugen von zugehörigen Signalen oder Steuerbefehlen |
| CN109270927B (zh) * | 2017-07-17 | 2022-03-11 | 阿里巴巴(中国)有限公司 | 道路数据的生成方法及装置 |
| EP4090566B1 (en) | 2020-01-16 | 2024-01-17 | C.R.F. Società Consortile per Azioni | Automatic recognition of anomalous situations along roads travelled by motor-vehicles for intelligent motor-vehicle driving speed control along the roads |
| CN111261012B (zh) * | 2020-01-19 | 2022-01-28 | 佛山科学技术学院 | 一种气动教学小车 |
| KR20220062940A (ko) * | 2020-11-09 | 2022-05-17 | 현대자동차주식회사 | 차량의 주행 제어 장치 및 방법 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011036855A1 (ja) * | 2009-09-24 | 2011-03-31 | 三菱電機株式会社 | 走行パターン生成装置 |
| WO2011074096A1 (ja) * | 2009-12-17 | 2011-06-23 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2014189083A (ja) * | 2013-03-26 | 2014-10-06 | Aisin Aw Co Ltd | 車両制御システム、車両制御方法及びコンピュータプログラム |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19847849A1 (de) * | 1998-10-16 | 2000-04-27 | Nokia Mobile Phones Ltd | Verfahren und Vorrichtung zur Selektion von Verkehrsinformation für ein Kraftfahrzeug |
| US7355528B2 (en) * | 2003-10-16 | 2008-04-08 | Hitachi, Ltd. | Traffic information providing system and car navigation system |
| JP4346472B2 (ja) * | 2004-02-27 | 2009-10-21 | 株式会社ザナヴィ・インフォマティクス | 交通情報予測装置 |
| KR101053583B1 (ko) * | 2004-04-07 | 2011-08-03 | 엘지전자 주식회사 | 이동통신단말기 |
| KR100711866B1 (ko) * | 2005-05-18 | 2007-04-25 | 엘지전자 주식회사 | 소통상태에 대한 예측정보를 제공하고 이를 이용하는 방법및 장치 |
| ATE410761T1 (de) * | 2006-11-10 | 2008-10-15 | Engine Srl | System und verfahren zur detektion der durchschnittsgeschwindigkeit von fahrzeugen zur kontrolle des verkehrs |
| KR100822010B1 (ko) * | 2006-11-30 | 2008-04-15 | 에스케이에너지 주식회사 | 교통정보 수집용 수치지도를 이용한 교통정보 제공 시스템및 방법 |
| JP4646990B2 (ja) | 2008-01-23 | 2011-03-09 | 本田技研工業株式会社 | 車両制御装置 |
| KR20110073233A (ko) * | 2009-12-22 | 2011-06-29 | 한국과학기술원 | 차간 거리 유지가 가능한 차량용 순항 제어 장치 및 방법 |
| JP5625603B2 (ja) * | 2010-08-09 | 2014-11-19 | トヨタ自動車株式会社 | 車両制御装置、車両制御システムおよび管制装置 |
| KR101393683B1 (ko) | 2012-06-29 | 2014-05-13 | 서울대학교산학협력단 | 차량의 주행속도 예측 시스템 및 방법 |
| KR101428184B1 (ko) | 2012-08-29 | 2014-08-07 | 현대자동차주식회사 | 전기자동차의 타행 주행 제어 방법 |
-
2014
- 2014-12-12 KR KR1020140179662A patent/KR101664043B1/ko active IP Right Grant
-
2015
- 2015-07-27 US US14/810,133 patent/US9679483B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011036855A1 (ja) * | 2009-09-24 | 2011-03-31 | 三菱電機株式会社 | 走行パターン生成装置 |
| WO2011074096A1 (ja) * | 2009-12-17 | 2011-06-23 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2014189083A (ja) * | 2013-03-26 | 2014-10-06 | Aisin Aw Co Ltd | 車両制御システム、車両制御方法及びコンピュータプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160171889A1 (en) | 2016-06-16 |
| KR20160071903A (ko) | 2016-06-22 |
| US9679483B2 (en) | 2017-06-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101664043B1 (ko) | 교통정보 제공시스템 및 그 방법 | |
| KR101428184B1 (ko) | 전기자동차의 타행 주행 제어 방법 | |
| JP6222137B2 (ja) | 車両制御装置 | |
| US9272711B1 (en) | Congestion-friendly adaptive cruise control | |
| CN106710307A (zh) | 一种车辆辅助驾驶方法和装置 | |
| US20150057914A1 (en) | Unexpectedness prediction sensitivity determination apparatus | |
| JP7081423B2 (ja) | 情報処理システム | |
| JP2011170555A (ja) | 車群走行制御装置 | |
| US9412212B2 (en) | Unexpectedness prediction sensitivity determination apparatus | |
| JP2016149044A (ja) | 隊列走行管理装置、及び隊列走行管理プログラム | |
| CN110576856A (zh) | 一种自适应巡航状态下的速度确定方法、装置及汽车 | |
| JP6988637B2 (ja) | 自動運転進路決定装置 | |
| CN111301412A (zh) | 队列行驶系统 | |
| JP6326968B2 (ja) | 運転支援システム及び運転支援方法 | |
| JP2019109700A (ja) | 車両制御装置 | |
| CN103129556A (zh) | 行驶辅助系统 | |
| CN114056346B (zh) | 一种自动驾驶行车控制方法及装置 | |
| US8676468B2 (en) | Vehicle control device | |
| JP5146420B2 (ja) | 走行支援装置 | |
| WO2019235056A1 (ja) | 車両用制御装置 | |
| JP6326983B2 (ja) | 運転支援システム及び運転支援方法 | |
| CN112896183A (zh) | 车辆故障判断设备和方法 | |
| KR102558561B1 (ko) | 경로 구간별 최적 속도 제공 방법 및 시스템 | |
| KR20200116390A (ko) | 데이터 검출 시스템을 이용한 예측적 자동차 변속기 제어 방법 | |
| JP2019061362A (ja) | 情報処理装置、車載制御装置、情報処理システム、情報処理方法、制御方法、およびコンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |