KR100552691B1 - 이동로봇의 자기위치 및 방위각 추정방법 및 장치 - Google Patents
이동로봇의 자기위치 및 방위각 추정방법 및 장치 Download PDFInfo
- Publication number
- KR100552691B1 KR100552691B1 KR1020030064242A KR20030064242A KR100552691B1 KR 100552691 B1 KR100552691 B1 KR 100552691B1 KR 1020030064242 A KR1020030064242 A KR 1020030064242A KR 20030064242 A KR20030064242 A KR 20030064242A KR 100552691 B1 KR100552691 B1 KR 100552691B1
- Authority
- KR
- South Korea
- Prior art keywords
- marker
- mobile robot
- image
- artificial
- ceiling image
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 43
- 230000004807 localization Effects 0.000 title description 2
- 239000003550 marker Substances 0.000 claims abstract description 75
- 238000001514 detection method Methods 0.000 claims abstract description 20
- 238000007781 pre-processing Methods 0.000 claims description 14
- 230000003667 anti-reflective effect Effects 0.000 claims description 5
- 238000005286 illumination Methods 0.000 claims description 4
- 239000000284 extract Substances 0.000 claims 2
- 230000003287 optical effect Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 238000003909 pattern recognition Methods 0.000 description 2
- 238000003672 processing method Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000002203 pretreatment Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images




















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F17/00—Digital computing or data processing equipment or methods, specially adapted for specific functions
- G06F17/10—Complex mathematical operations
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
- G05D1/0253—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means extracting relative motion information from a plurality of images taken successively, e.g. visual odometry, optical flow
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0234—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using optical markers or beacons
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Electromagnetism (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Data Mining & Analysis (AREA)
- Mathematical Physics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Mathematical Analysis (AREA)
- Mathematical Optimization (AREA)
- Computational Mathematics (AREA)
- Pure & Applied Mathematics (AREA)
- Databases & Information Systems (AREA)
- Software Systems (AREA)
- General Engineering & Computer Science (AREA)
- Algebra (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Manipulator (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
Description



Claims (19)
- (a) 이동로봇이 주행하는 장소의 천정영상을 획득하는 단계;(b) 재귀반사형이며 각각 무반사부분과 적외선반사부분으로 이루어지는 제1 및 제2 표식으로 구성되는 인공표식을 상기 천정영상으로부터 검출하는 단계; 및(c) 상기 인공표식이 검출되었는지 여부에 따라서 상기 인공표식의 위치 또는 엔코더 정보를 이용하여 상기 이동로봇의 위치 및 방위각을 추정하는 단계를 포함하는 것을 특징으로 하는 이동로봇의 자기 위치 및 방위각 추정방법.
- 제1 항에 있어서, 상기 제1 및 제2 표식은 소정거리 이격된 원형으로 이루어지며, 제1 표식의 바깥쪽 부분과 제2 표식의 안쪽 부분은 무반사부분이고, 제1 표식의 안쪽 부분과 제2 표식의 바깥쪽 부분은 적외선반사부분으로 이루어지는 것을 특징으로 하는 이동로봇의 자기 위치 및 방위각 추정방법.
- 제1 항에 있어서, 상기 (b) 단계 이전에(d) 상기 획득된 천정영상으로부터 현재 환경을 판별하고, 판별된 환경에 따라서 소정의 영상처리를 수행하는 단계를 더 포함하는 것을 특징으로 하는 이동로봇의 자기 위치 및 방위각 추정방법.
- 제3 항에 있어서, 상기 (d) 단계는(d1) 상기 획득된 천정영상의 평균밝기를 산출하는 단계;(d2) 상기 산출된 평균밝기를 소정의 기준치와 비교하여, 현재 환경이 조명이 밝은 상태인지 어두운 상태인지를 판단하는 단계;(d3) 현재 환경이 조명이 밝은 상태인 것으로 판단된 경우, 상기 천정영상에 대하여 왜곡보상처리 및 전처리를 수행하는 단계; 및(d4) 현재 환경이 조명이 어두운 상태인 것으로 판단된 경우, 상기 천정영상을 반전시킨 다음 왜곡보상처리 및 전처리를 수행하는 단계를 구비하는 것을 특징으로 하는 이동로봇의 자기 위치 및 방위각 추정방법.
- 제1 항에 있어서, 상기 (b) 단계는(b1) 상기 천정영상에 대하여 상기 인공표식과의 윤곽선 정합 수행결과와 상기 인공표식의 기하학적 정보를 이용하여 상기 천정영상에 대하여 적어도 하나 이상의 후보영역을 추출하는 단계;(b2) 상기 검출된 각 후보영역에 대하여 템플릿 매칭을 수행하고, 템플릿 매칭 수행 결과 가장 큰 신뢰값을 선택하여 소정의 기준치와 비교하는 단계; 및(b3) 상기 (b2) 단계에서의 비교결과, 상기 선택된 신뢰값이 기준치보다 큰 경우 인공표식 검출에 성공한 것으로 판단하고, 작은 경우 인공표식 검출에 실패한 것으로 판단하는 단계를 구비하는 것을 특징으로 하는 이동로봇의 자기 위치 및 방위각 추정방법.
- 제5 항에 있어서, 상기 (b1) 단계에서 이용되는 천정영상은 왜곡보상처리, 전처리 및 이진화처리가 순차적으로 미리 수행된 것을 특징으로 하는 이동로봇의 자기 위치 및 방위각 추정방법.
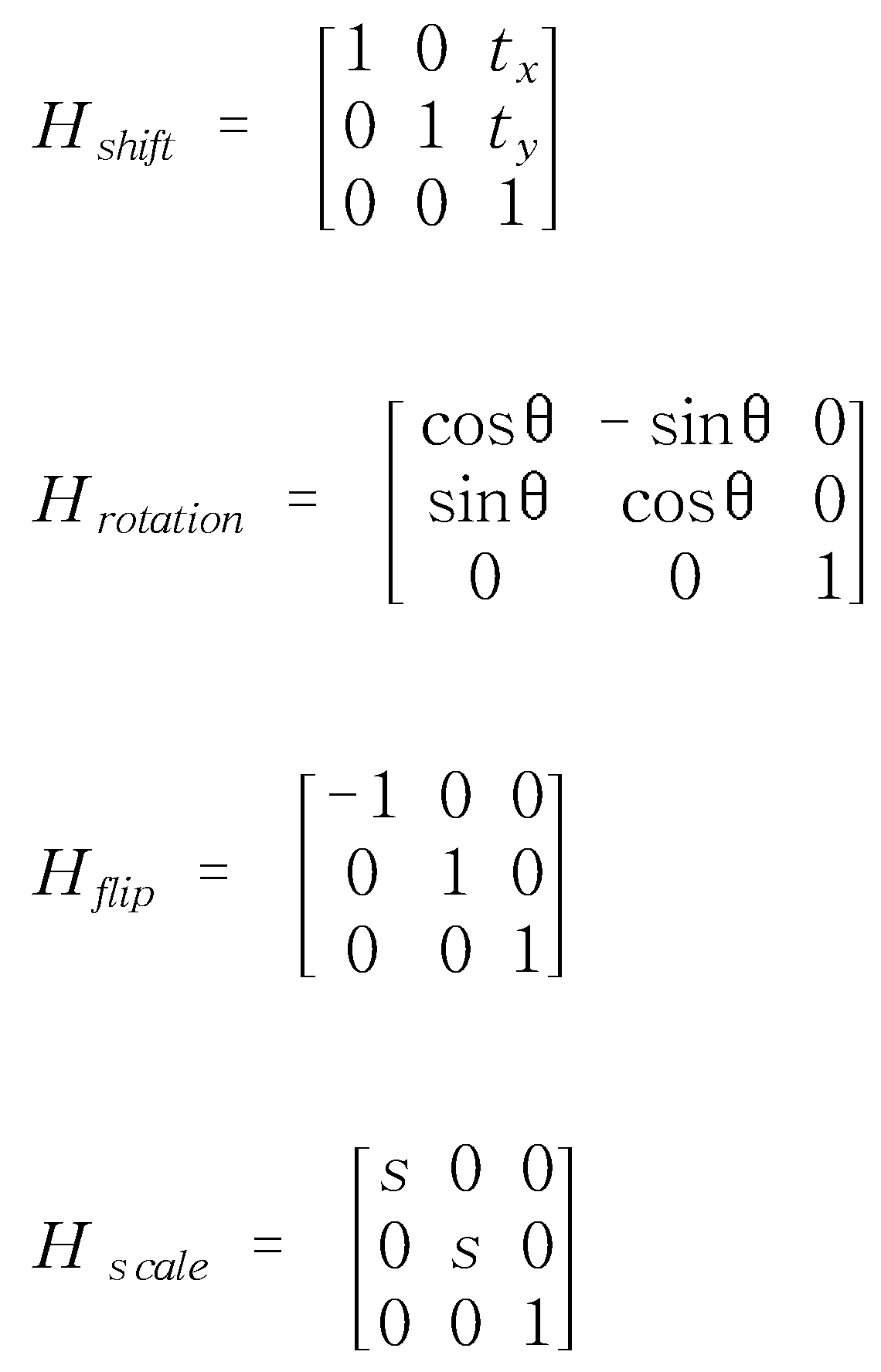
- 제1 항에 있어서, 상기 (c) 단계에서는 검출된 인공표식을 이용하는 경우, 상기 인공표식으로부터 상기 이동로봇의 상대적인 위치 및 방위각을 쉬프트, 로테이션 및 플립과정을 순차적으로 거쳐 추정하는 것을 특징으로 하는 이동로봇의 자기 위치 및 방위각 추정방법.
- 이동로봇이 주행하는 장소의 천정영상을 획득하는 천정영상 획득부;재귀반사형이며 각각 무반사부분과 적외선반사부분으로 이루어지는 제1 및 제2 표식으로 구성되는 인공표식을 상기 천정영상으로부터 검출하는 표식검출부; 및상기 인공표식이 검출되었는지 여부에 따라서 상기 인공표식의 위치 또는 엔코더 정보를 이용하여 상기 이동로봇의 위치 및 방위각을 추정하는 위치 및 방위각 추정부를 포함하는 것을 특징으로 하는 이동로봇의 자기 위치 및 방위각 추정장치.
- 제8 항에 있어서, 상기 제1 및 제2 표식은 소정거리 이격된 원형으로 이루어지며, 제1 표식의 바깥쪽 부분과 제2 표식의 안쪽 부분은 무반사부분이고, 제1 표식의 안쪽 부분과 제2 표식의 바깥쪽 부분은 적외선반사부분으로 이루어지는 것을 특징으로 하는 이동로봇의 자기 위치 및 방위각 추정장치.
- 제8 항에 있어서, 상기 장치는 상기 획득된 천정영상으로부터 현재 환경을 판별하고, 판별된 환경에 따라서 소정의 영상처리를 수행하는 영상처리부를 더 포함하는 것을 특징으로 하는 이동로봇의 자기 위치 및 방위각 추정장치.
- 제10 항에 있어서, 상기 영상처리부는 상기 획득된 천정영상의 평균밝기를 산출하고, 상기 산출된 평균밝기를 소정의 기준치와 비교하여, 현재 환경이 조명이 밝은 상태인지 어두운 상태인지를 판단하고, 현재 환경이 조명이 어두운 상태인 것으로 판단된 경우, 상기 천정영상을 반전시킨 다음 왜곡보상처리 및 전처리를 수행하는 것을 특징으로 하는 이동로봇의 자기 위치 및 방위각 추정장치.
- 제1 항에 있어서, 상기 표식검출부는 상기 천정영상에 대하여 상기 인공표식과의 윤곽선 정합 수행결과와 상기 인공표식의 기하학적 정보를 이용하여 상기 천정영상에 대하여 적어도 하나 이상의 후보영역을 추출하고, 상기 검출된 각 후보영역에 대하여 템플릿 매칭을 수행하고, 템플릿 매칭 수행 결과 가장 큰 신뢰값을 선택하여 소정의 기준치와 비교하여 상기 선택된 신뢰값이 기준치보다 큰 경우 인공표식 검출에 성공한 것으로 판단하고, 작은 경우 인공표식 검출에 실패한 것으로 판단하는 것을 특징으로 하는 이동로봇의 자기 위치 및 방위각 추정장치.
- 이동로봇이 주행하는 장소의 천정영상을 획득하는 천정영상 획득부;재귀반사형이며 무반사부분과 적외선반사부분으로 이루어지는 제1 및 제2 표식으로 구성되는 인공표식을 상기 천정영상으로부터 검출하는 표식검출부;상기 인공표식 검출 성공여부에 따라서 상기 인공표식의 위치 또는 엔코더 정보를 이용하여 상기 이동로봇의 위치 및 방위각을 추정하는 위치 및 방위각 추정부; 및상기 위치 및 방위각 추정부에서 추정된 위치 및 방위각에 따라서 상기 이동로봇의 주행을 제어하는 주행제어부를 포함하는 것을 특징으로 하는 이동로봇.
- 제13 항에 있어서, 상기 제1 및 제2 표식은 소정거리 이격된 원형으로 이루어지며, 제1 표식의 바깥쪽 부분과 제2 표식의 안쪽 부분은 무반사부분이고, 제1 표식의 안쪽 부분과 제2 표식의 바깥쪽 부분은 적외선반사부분으로 이루어지는 것을 특징으로 하는 이동로봇.
- 제13 항에 있어서, 상기 획득된 천정영상으로부터 현재 환경을 판별하고, 판별된 환경에 따라서 소정의 영상처리를 수행하는 영상처리부를 더 포함하는 것을 특징으로 하는 이동로봇.
- 제15 항에 있어서, 상기 영상처리부는 상기 획득된 천정영상의 평균밝기를 산출하고, 상기 산출된 평균밝기를 소정의 기준치와 비교하여, 현재 환경이 조명이 밝은 상태인지 어두운 상태인지를 판단하고, 현재 환경이 조명이 어두운 상태로 판 단된 경우, 상기 천정영상을 반전시킨 다음 왜곡보상처리 및 전처리를 수행하는 것을 특징으로 하는 이동로봇.
- 제13 항에 있어서, 상기 표식검출부는 상기 천정영상에 대하여 상기 인공표식과의 윤곽선 정합 수행결과와 상기 인공표식의 기하학적 정보를 이용하여 상기 천정영상에 대하여 적어도 하나 이상의 후보영역을 추출하고, 상기 검출된 각 후보영역에 대하여 템플릿 매칭을 수행하고, 템플릿 매칭 수행 결과 가장 큰 신뢰값을 선택하여 소정의 기준치와 비교하여 상기 선택된 신뢰값이 기준치보다 큰 경우 인공표식 검출에 성공한 것으로 판단하고, 작은 경우 인공표식 검출에 실패한 것으로 판단하는 것을 특징으로 하는 이동로봇.
- 제1 항 내지 제7 항중 어느 한 항에 기재된 방법을 실행할 수 있는 프로그램을 기록한 컴퓨터로 읽을 수 있는 기록매체.
- 제13 항에 있어서, 상기 장치는상기 천정영상의 평균밝기를 산출하고, 상기 산출된 평균밝기를 이용하여 현재 환경이 조명이 밝은 상태인지 어두운 상태인지를 판단하는 영상밝기 비교부;상기 영상밝기 비교부의 판단결과에 따라서 상기 이동로봇에 부착된 조명장치를 제어하는 조명제어부를 더 포함하는 것을 특징으로 하는 이동로봇.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020030064242A KR100552691B1 (ko) | 2003-09-16 | 2003-09-16 | 이동로봇의 자기위치 및 방위각 추정방법 및 장치 |
| EP04255550.8A EP1517210B1 (en) | 2003-09-16 | 2004-09-14 | Apparatus and method for estimating position and orientation of mobile robot |
| CN2004100789589A CN1598610B (zh) | 2003-09-16 | 2004-09-16 | 用于估计移动式机器人的位置和方位的装置和方法 |
| US10/941,846 US7765027B2 (en) | 2003-09-16 | 2004-09-16 | Apparatus and method for estimating a position and an orientation of a mobile robot |
| JP2004270092A JP4533065B2 (ja) | 2003-09-16 | 2004-09-16 | 人工標識生成方法、移動ロボットの自己位置及び方位角の推定方法、移動ロボットの自己位置及び方位角の推定装置、移動ロボット及び推定プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020030064242A KR100552691B1 (ko) | 2003-09-16 | 2003-09-16 | 이동로봇의 자기위치 및 방위각 추정방법 및 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20050027858A KR20050027858A (ko) | 2005-03-21 |
| KR100552691B1 true KR100552691B1 (ko) | 2006-02-20 |
Family
ID=34192235
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020030064242A KR100552691B1 (ko) | 2003-09-16 | 2003-09-16 | 이동로봇의 자기위치 및 방위각 추정방법 및 장치 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7765027B2 (ko) |
| EP (1) | EP1517210B1 (ko) |
| JP (1) | JP4533065B2 (ko) |
| KR (1) | KR100552691B1 (ko) |
| CN (1) | CN1598610B (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101037971B1 (ko) | 2009-06-22 | 2011-05-30 | (주)로봇에버 | 영상기반 위치인식 방법 및 시스템 |
Families Citing this family (75)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100569181B1 (ko) * | 2004-01-06 | 2006-04-07 | 김진오 | 실내 항법을 위한 좌표확인 시스템 |
| KR100669250B1 (ko) * | 2005-10-31 | 2007-01-16 | 한국전자통신연구원 | 인공표식 기반의 실시간 위치산출 시스템 및 방법 |
| TW200736870A (en) * | 2005-11-04 | 2007-10-01 | Murata Machinery Ltd | Control device for movable body |
| JP4438736B2 (ja) * | 2005-11-04 | 2010-03-24 | 村田機械株式会社 | 搬送装置 |
| US7681796B2 (en) * | 2006-01-05 | 2010-03-23 | International Business Machines Corporation | Mobile device tracking |
| JP4448497B2 (ja) * | 2006-03-23 | 2010-04-07 | 本田技研工業株式会社 | 移動体の自己位置検出装置および位置検出システム |
| KR100785784B1 (ko) * | 2006-07-27 | 2007-12-13 | 한국전자통신연구원 | 인공표식과 오도메트리를 결합한 실시간 위치산출 시스템및 방법 |
| KR100966875B1 (ko) * | 2006-09-26 | 2010-06-29 | 삼성전자주식회사 | 전방위 영상을 이용한 로봇의 위치 결정방법 |
| KR100773271B1 (ko) * | 2006-10-25 | 2007-11-05 | 전자부품연구원 | 단일 카메라를 이용한 이동 로봇의 위치 측정 방법 |
| JP4825980B2 (ja) * | 2007-03-06 | 2011-11-30 | 国立大学法人岩手大学 | 魚眼カメラの校正方法。 |
| US8368759B2 (en) * | 2007-03-13 | 2013-02-05 | Research Institute Of Industrial Science & Technology | Landmark for position determination of mobile robot and apparatus and method using it |
| KR100960650B1 (ko) * | 2007-04-03 | 2010-06-07 | 엘지전자 주식회사 | 이동로봇 및 그 동작방법 |
| KR100922494B1 (ko) * | 2007-07-19 | 2009-10-20 | 삼성전자주식회사 | 이동 로봇의 자세 측정 방법 및 상기 방법을 이용한 위치측정 방법 및 장치 |
| KR101337534B1 (ko) * | 2007-07-24 | 2013-12-06 | 삼성전자주식회사 | 이동 로봇의 위치 인식 장치 및 방법 |
| KR101461185B1 (ko) * | 2007-11-09 | 2014-11-14 | 삼성전자 주식회사 | 스트럭쳐드 라이트를 이용한 3차원 맵 생성 장치 및 방법 |
| KR20090066776A (ko) * | 2007-12-20 | 2009-06-24 | 한국전자통신연구원 | 로봇 위치 추정을 위한 위치결정서비스 프레임 워크 장치및 그 방법 |
| TWI384407B (zh) * | 2008-02-29 | 2013-02-01 | Ind Tech Res Inst | 利用盲文編碼圖案之區域識別系統 |
| CN102084391A (zh) | 2008-03-05 | 2011-06-01 | 电子湾有限公司 | 用于图像识别服务的方法和设备 |
| US9495386B2 (en) | 2008-03-05 | 2016-11-15 | Ebay Inc. | Identification of items depicted in images |
| KR101007045B1 (ko) * | 2008-03-12 | 2011-01-12 | 주식회사 애트랩 | 접촉센서 장치 및 이 장치의 포인팅 좌표 결정 방법 |
| KR101503904B1 (ko) * | 2008-07-07 | 2015-03-19 | 삼성전자 주식회사 | 이동 로봇의 지도 구성 장치 및 방법 |
| CN102596517B (zh) * | 2009-07-28 | 2015-06-17 | 悠进机器人股份公司 | 移动机器人定位和导航控制方法及使用该方法的移动机器人 |
| US9164577B2 (en) * | 2009-12-22 | 2015-10-20 | Ebay Inc. | Augmented reality system, method, and apparatus for displaying an item image in a contextual environment |
| US10127606B2 (en) | 2010-10-13 | 2018-11-13 | Ebay Inc. | Augmented reality system and method for visualizing an item |
| KR101906329B1 (ko) * | 2010-12-15 | 2018-12-07 | 한국전자통신연구원 | 카메라 기반의 실내 위치 인식 장치 및 방법 |
| US8737685B2 (en) | 2011-04-25 | 2014-05-27 | Honeywell International Inc. | Systems and methods for detecting the movement of an object |
| US8908923B2 (en) * | 2011-05-13 | 2014-12-09 | International Business Machines Corporation | Interior location identification |
| US20150153181A1 (en) * | 2011-07-27 | 2015-06-04 | Google Inc. | System and method for providing indoor navigation services |
| US9449342B2 (en) | 2011-10-27 | 2016-09-20 | Ebay Inc. | System and method for visualization of items in an environment using augmented reality |
| JP5601332B2 (ja) * | 2012-02-08 | 2014-10-08 | 村田機械株式会社 | 搬送車 |
| US10846766B2 (en) | 2012-06-29 | 2020-11-24 | Ebay Inc. | Contextual menus based on image recognition |
| CN103970133A (zh) * | 2013-01-31 | 2014-08-06 | 鸿富锦精密工业(武汉)有限公司 | 利用图像分析技术实现物体移动的方法及系统 |
| US10612939B2 (en) | 2014-01-02 | 2020-04-07 | Microsoft Technology Licensing, Llc | Ground truth estimation for autonomous navigation |
| CN103728589B (zh) * | 2014-01-09 | 2016-05-11 | 上海京颐科技股份有限公司 | 一种室内定位方法 |
| US10708550B2 (en) | 2014-04-08 | 2020-07-07 | Udisense Inc. | Monitoring camera and mount |
| JP6539958B2 (ja) | 2014-08-28 | 2019-07-10 | 村田機械株式会社 | 搬送車 |
| GB2529846B (en) | 2014-09-03 | 2019-02-20 | Dyson Technology Ltd | Illumination Control of a Vision System for a Mobile Robot |
| GB2529847B (en) | 2014-09-03 | 2018-12-19 | Dyson Technology Ltd | A mobile Robot with Independently Adjustable Light Sources |
| JP2017531259A (ja) * | 2014-10-31 | 2017-10-19 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | 位置に基づく制御方法、装置、移動可能な機器及びロボット |
| CN104950892B (zh) * | 2015-06-29 | 2017-10-31 | 厦门狄耐克物联智慧科技有限公司 | 一种机器人的行走控制系统及方法 |
| USD854074S1 (en) | 2016-05-10 | 2019-07-16 | Udisense Inc. | Wall-assisted floor-mount for a monitoring camera |
| CN106370188A (zh) * | 2016-09-21 | 2017-02-01 | 旗瀚科技有限公司 | 一种基于3d摄像机的机器人室内定位与导航方法 |
| US10803420B2 (en) | 2016-09-30 | 2020-10-13 | Staples, Inc. | Hybrid modular storage fetching system |
| US10683171B2 (en) | 2016-09-30 | 2020-06-16 | Staples, Inc. | Hybrid modular storage fetching system |
| US10589931B2 (en) | 2016-09-30 | 2020-03-17 | Staples, Inc. | Hybrid modular storage fetching system |
| CN106527434A (zh) * | 2016-11-07 | 2017-03-22 | 北京京东尚科信息技术有限公司 | 自动传送系统及方法 |
| EP3421936A1 (en) | 2017-06-30 | 2019-01-02 | Panasonic Automotive & Industrial Systems Europe GmbH | Optical marker element for geo location information |
| USD855684S1 (en) | 2017-08-06 | 2019-08-06 | Udisense Inc. | Wall mount for a monitoring camera |
| CN107843251B (zh) * | 2017-10-18 | 2020-01-31 | 广东宝乐机器人股份有限公司 | 移动机器人的位姿估计方法 |
| WO2019104108A1 (en) | 2017-11-22 | 2019-05-31 | Udisense Inc. | Respiration monitor |
| KR102024094B1 (ko) | 2017-12-21 | 2019-09-23 | 엘지전자 주식회사 | 인공지능을 이용한 이동 로봇 및 그 제어방법 |
| CN108181610B (zh) * | 2017-12-22 | 2021-11-19 | 鲁东大学 | 室内机器人定位方法和系统 |
| CN116509280A (zh) * | 2018-07-19 | 2023-08-01 | 科沃斯机器人股份有限公司 | 机器人控制方法、机器人及存储介质 |
| US11590997B1 (en) | 2018-08-07 | 2023-02-28 | Staples, Inc. | Autonomous shopping cart |
| US11084410B1 (en) | 2018-08-07 | 2021-08-10 | Staples, Inc. | Automated guided vehicle for transporting shelving units |
| US11630447B1 (en) | 2018-08-10 | 2023-04-18 | Staples, Inc. | Automated guided vehicle for transporting objects |
| JP6684531B2 (ja) * | 2018-08-23 | 2020-04-22 | 三菱ロジスネクスト株式会社 | 無人搬送システム |
| AU2019392447A1 (en) | 2018-12-03 | 2021-06-24 | Sharkninja Operating Llc | Optical indicium for communicating information to autonomous devices |
| US11119487B2 (en) | 2018-12-31 | 2021-09-14 | Staples, Inc. | Automated preparation of deliveries in delivery vehicles using automated guided vehicles |
| US11180069B2 (en) | 2018-12-31 | 2021-11-23 | Staples, Inc. | Automated loading of delivery vehicles using automated guided vehicles |
| USD900431S1 (en) | 2019-01-28 | 2020-11-03 | Udisense Inc. | Swaddle blanket with decorative pattern |
| USD900428S1 (en) | 2019-01-28 | 2020-11-03 | Udisense Inc. | Swaddle band |
| USD900430S1 (en) | 2019-01-28 | 2020-11-03 | Udisense Inc. | Swaddle blanket |
| USD900429S1 (en) | 2019-01-28 | 2020-11-03 | Udisense Inc. | Swaddle band with decorative pattern |
| US10399227B1 (en) * | 2019-03-29 | 2019-09-03 | Mujin, Inc. | Method and control system for verifying and updating camera calibration for robot control |
| US10906184B2 (en) | 2019-03-29 | 2021-02-02 | Mujin, Inc. | Method and control system for verifying and updating camera calibration for robot control |
| US11124401B1 (en) | 2019-03-31 | 2021-09-21 | Staples, Inc. | Automated loading of delivery vehicles |
| CA3144544A1 (en) * | 2019-06-28 | 2020-12-30 | Advanced Intelligent Systems Inc. | System and method for optical localization |
| CN110530399B (zh) * | 2019-09-06 | 2023-03-24 | 苏州寻迹智行机器人技术有限公司 | 双轮差速移动机器人里程计标定的轮间距修正方法 |
| CN110597266A (zh) * | 2019-09-26 | 2019-12-20 | 青岛蚂蚁机器人有限责任公司 | 基于二维码的机器人路径动态规划方法 |
| CN113110408B (zh) * | 2019-12-25 | 2023-09-29 | 北京极智嘉科技股份有限公司 | 机器人定位系统及方法、机器人、计算机可读存储介质 |
| CN112880689A (zh) * | 2021-01-29 | 2021-06-01 | 北京百度网讯科技有限公司 | 一种领位方法、装置、电子设备及存储介质 |
| CN113075647A (zh) * | 2021-02-20 | 2021-07-06 | 上海擎朗智能科技有限公司 | 机器人定位方法、装置、设备和介质 |
| CN114355933A (zh) * | 2021-12-31 | 2022-04-15 | 山东新一代信息产业技术研究院有限公司 | 机器人对接充电桩的运动控制方法 |
| KR20240051654A (ko) | 2022-10-13 | 2024-04-22 | 장영익 | 고압가스를 이용한 감압 밸브 |
Family Cites Families (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2018422B (en) * | 1978-03-29 | 1983-01-19 | Hitachi Ltd | Mark detecting system |
| GB8313339D0 (en) * | 1983-05-14 | 1983-06-22 | Gen Electric Co Plc | Vehicle guidance |
| US4817000A (en) * | 1986-03-10 | 1989-03-28 | Si Handling Systems, Inc. | Automatic guided vehicle system |
| US5208750A (en) * | 1987-06-17 | 1993-05-04 | Nissan Motor Co., Ltd. | Control system for unmanned automotive vehicle |
| US4947094A (en) * | 1987-07-23 | 1990-08-07 | Battelle Memorial Institute | Optical guidance system for industrial vehicles |
| US4846297A (en) * | 1987-09-28 | 1989-07-11 | Tennant Company | Automated guided vehicle |
| US4790402A (en) * | 1987-09-28 | 1988-12-13 | Tennant Company | Automated guided vehicle |
| US4996468A (en) * | 1987-09-28 | 1991-02-26 | Tennant Company | Automated guided vehicle |
| JPH01274214A (ja) | 1988-04-26 | 1989-11-02 | Mazda Motor Corp | 移動車の画像処理装置 |
| DE68927746T2 (de) | 1988-05-09 | 1997-07-03 | Int Paper Co | Sauerstoffundurchlässiger leckagefreier Behälter |
| US5040116A (en) * | 1988-09-06 | 1991-08-13 | Transitions Research Corporation | Visual navigation and obstacle avoidance structured light system |
| US4933864A (en) * | 1988-10-04 | 1990-06-12 | Transitions Research Corporation | Mobile robot navigation employing ceiling light fixtures |
| US5051906A (en) * | 1989-06-07 | 1991-09-24 | Transitions Research Corporation | Mobile robot navigation employing retroreflective ceiling features |
| US5187662A (en) * | 1990-01-24 | 1993-02-16 | Honda Giken Kogyo Kabushiki Kaisha | Steering control system for moving vehicle |
| JPH0684522B2 (ja) | 1990-06-05 | 1994-10-26 | ハリマセラミック株式会社 | 真空脱ガス装置スノーケル部の補修方法 |
| DE4023952A1 (de) * | 1990-07-27 | 1992-02-06 | Bayerische Motoren Werke Ag | Bildverarbeitungsverfahren und bildverarbeitungssystem fuer fahrzeuge, insbesondere fuer kraftfahrzeuge |
| JP2521156Y2 (ja) * | 1990-08-08 | 1996-12-25 | アニマ株式会社 | 位置計測用ターゲット |
| US5390118A (en) * | 1990-10-03 | 1995-02-14 | Aisin Seiki Kabushiki Kaisha | Automatic lateral guidance control system |
| DE69130147T2 (de) * | 1990-10-03 | 1999-04-01 | Aisin Seiki K.K., Kariya, Aichi | Automatisches Steuersystem für Seitenführung |
| JPH064127A (ja) | 1992-06-16 | 1994-01-14 | Ishikawajima Harima Heavy Ind Co Ltd | 屋内移動体の自己位置測定装置 |
| US5567919A (en) | 1993-12-22 | 1996-10-22 | Combustion Engineering, Inc. | Gravimetric feeding system for boiler fuel and sorbent |
| US5530330A (en) * | 1994-03-30 | 1996-06-25 | Inco Limited | Automated guidance system for a vehicle |
| US5525883A (en) * | 1994-07-08 | 1996-06-11 | Sara Avitzour | Mobile robot location determination employing error-correcting distributed landmarks |
| JPH08313215A (ja) * | 1995-05-23 | 1996-11-29 | Olympus Optical Co Ltd | 2次元距離センサ |
| US5675489A (en) * | 1995-07-06 | 1997-10-07 | Carnegie Mellon University | System and method for estimating lateral position |
| US5875408A (en) * | 1995-07-17 | 1999-02-23 | Imra America, Inc. | Automated vehicle guidance system and method for automatically guiding a vehicle |
| KR19980042190A (ko) * | 1996-11-07 | 1998-08-17 | 요시다쇼이치로 | 위치검출용 마크, 마크 검출방법 및 그 장치, 및 노광장치 |
| US6163745A (en) * | 1997-04-15 | 2000-12-19 | Ainsworth Inc. | Guidance system for automated vehicles, and guidance strip for use therewith |
| US6194486B1 (en) * | 1997-05-28 | 2001-02-27 | Trw Inc. | Enhanced paint for microwave/millimeter wave radiometric detection applications and method of road marker detection |
| JP2000111344A (ja) | 1998-10-08 | 2000-04-18 | Asahi Optical Co Ltd | 写真測量用ターゲット |
| US6629028B2 (en) * | 2000-06-29 | 2003-09-30 | Riken | Method and system of optical guidance of mobile body |
| US6496754B2 (en) * | 2000-11-17 | 2002-12-17 | Samsung Kwangju Electronics Co., Ltd. | Mobile robot and course adjusting method thereof |
| RU2220643C2 (ru) * | 2001-04-18 | 2004-01-10 | Самсунг Гванджу Электроникс Ко., Лтд. | Автоматическое чистящее устройство, автоматическая чистящая система и способ управления этой системой (варианты) |
| US6577764B2 (en) * | 2001-08-01 | 2003-06-10 | Teranex, Inc. | Method for measuring and analyzing digital video quality |
| US6807478B2 (en) * | 2001-12-27 | 2004-10-19 | Koninklijke Philips Electronics N.V. | In-building navigation system |
| EP1502896A4 (en) * | 2002-01-23 | 2009-11-18 | Toyota Jidoshokki Kk | POSITION CONTROL DEVICE AND POSITION CONTROL PROCESS FOR LOADING DEVICE IN INDUSTRIAL VEHICLE |
| KR100483548B1 (ko) * | 2002-07-26 | 2005-04-15 | 삼성광주전자 주식회사 | 로봇 청소기와 그 시스템 및 제어 방법 |
| US7231063B2 (en) * | 2002-08-09 | 2007-06-12 | Intersense, Inc. | Fiducial detection system |
| US7089099B2 (en) * | 2004-07-30 | 2006-08-08 | Automotive Technologies International, Inc. | Sensor assemblies |
-
2003
- 2003-09-16 KR KR1020030064242A patent/KR100552691B1/ko active IP Right Grant
-
2004
- 2004-09-14 EP EP04255550.8A patent/EP1517210B1/en not_active Expired - Lifetime
- 2004-09-16 CN CN2004100789589A patent/CN1598610B/zh not_active Expired - Fee Related
- 2004-09-16 JP JP2004270092A patent/JP4533065B2/ja not_active Expired - Fee Related
- 2004-09-16 US US10/941,846 patent/US7765027B2/en not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101037971B1 (ko) | 2009-06-22 | 2011-05-30 | (주)로봇에버 | 영상기반 위치인식 방법 및 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1517210A3 (en) | 2006-10-04 |
| US20050065655A1 (en) | 2005-03-24 |
| CN1598610A (zh) | 2005-03-23 |
| JP4533065B2 (ja) | 2010-08-25 |
| JP2005121641A (ja) | 2005-05-12 |
| CN1598610B (zh) | 2010-10-27 |
| KR20050027858A (ko) | 2005-03-21 |
| EP1517210A2 (en) | 2005-03-23 |
| EP1517210B1 (en) | 2015-04-08 |
| US7765027B2 (en) | 2010-07-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100552691B1 (ko) | 이동로봇의 자기위치 및 방위각 추정방법 및 장치 | |
| JP4450532B2 (ja) | 相対位置計測装置 | |
| US7321386B2 (en) | Robust stereo-driven video-based surveillance | |
| US8699754B2 (en) | Clear path detection through road modeling | |
| CN111856491B (zh) | 用于确定车辆的地理位置和朝向的方法和设备 | |
| CN111089590B (zh) | 一种视觉和激光融合的移动机器人跟踪人腿方法 | |
| CN111611853B (zh) | 一种传感信息融合方法、装置及存储介质 | |
| JP5747549B2 (ja) | 信号機検出装置及びプログラム | |
| Zhang et al. | Robust appearance based visual route following for navigation in large-scale outdoor environments | |
| KR101569919B1 (ko) | 차량의 위치 추정 장치 및 방법 | |
| CN111989544A (zh) | 基于光学目标的室内车辆导航的系统和方法 | |
| KR20110011424A (ko) | 이동 로봇의 위치 인식 및 주행 제어 방법과 이를 이용한 이동 로봇 | |
| US20100104137A1 (en) | Clear path detection using patch approach | |
| US20090268948A1 (en) | Pixel-based texture-rich clear path detection | |
| US11371851B2 (en) | Method and system for determining landmarks in an environment of a vehicle | |
| CN111652896B (zh) | 惯导辅助陨石坑由粗到精检测方法 | |
| JP2002197444A (ja) | 車両の走行路認識装置 | |
| CN107421540B (zh) | 一种基于视觉的移动机器人导航方法及系统 | |
| WO2008013355A1 (en) | System and method for calculating location using a combination of odometry and landmarks | |
| JP6758160B2 (ja) | 車両位置検出装置、車両位置検出方法及び車両位置検出用コンピュータプログラム | |
| JP5281867B2 (ja) | 車両走行速度制御装置および方法 | |
| Do et al. | Context-based parking slot detection with a realistic dataset | |
| CN115014338A (zh) | 一种基于二维码视觉和激光slam的移动机器人定位系统及方法 | |
| KR101944497B1 (ko) | 지능형 cctv를 활용한 무인주행차량의 제어시스템 및 방법 | |
| JP3589293B2 (ja) | 道路の白線検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20130115 Year of fee payment: 8 |
|
| FPAY | Annual fee payment |
Payment date: 20140124 Year of fee payment: 9 |
|
| FPAY | Annual fee payment |
Payment date: 20150116 Year of fee payment: 10 |
|
| FPAY | Annual fee payment |
Payment date: 20160118 Year of fee payment: 11 |
|
| FPAY | Annual fee payment |
Payment date: 20170117 Year of fee payment: 12 |
|
| FPAY | Annual fee payment |
Payment date: 20180117 Year of fee payment: 13 |
|
| FPAY | Annual fee payment |
Payment date: 20200120 Year of fee payment: 15 |