JPWO2018100604A1 - Elevator malfunction remote recovery system - Google Patents
Elevator malfunction remote recovery system Download PDFInfo
- Publication number
- JPWO2018100604A1 JPWO2018100604A1 JP2018545389A JP2018545389A JPWO2018100604A1 JP WO2018100604 A1 JPWO2018100604 A1 JP WO2018100604A1 JP 2018545389 A JP2018545389 A JP 2018545389A JP 2018545389 A JP2018545389 A JP 2018545389A JP WO2018100604 A1 JPWO2018100604 A1 JP WO2018100604A1
- Authority
- JP
- Japan
- Prior art keywords
- recovery
- failure
- elevator
- remote
- command
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000011084 recovery Methods 0.000 title claims abstract description 375
- 230000007257 malfunction Effects 0.000 title 1
- 238000003745 diagnosis Methods 0.000 claims abstract description 195
- 230000010365 information processing Effects 0.000 description 80
- 238000004891 communication Methods 0.000 description 50
- 238000007689 inspection Methods 0.000 description 43
- 238000012423 maintenance Methods 0.000 description 34
- 230000008439 repair process Effects 0.000 description 14
- 230000005856 abnormality Effects 0.000 description 12
- 238000000034 method Methods 0.000 description 8
- 238000012544 monitoring process Methods 0.000 description 6
- 108010076282 Factor IX Proteins 0.000 description 4
- 108010054218 Factor VIII Proteins 0.000 description 4
- 102000001690 Factor VIII Human genes 0.000 description 4
- 230000002159 abnormal effect Effects 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 108010023321 Factor VII Proteins 0.000 description 3
- 238000004140 cleaning Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000010187 selection method Methods 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/0087—Devices facilitating maintenance, repair or inspection tasks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/0006—Monitoring devices or performance analysers
- B66B5/0018—Devices monitoring the operating condition of the elevator system
- B66B5/0025—Devices monitoring the operating condition of the elevator system for maintenance or repair
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04Q—SELECTING
- H04Q9/00—Arrangements in telecontrol or telemetry systems for selectively calling a substation from a main station, in which substation desired apparatus is selected for applying a control signal thereto or for obtaining measured values therefrom
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Quality & Reliability (AREA)
- Strategic Management (AREA)
- Entrepreneurship & Innovation (AREA)
- Human Resources & Organizations (AREA)
- Marketing (AREA)
- Operations Research (AREA)
- Computer Networks & Wireless Communication (AREA)
- Economics (AREA)
- Tourism & Hospitality (AREA)
- Physics & Mathematics (AREA)
- General Business, Economics & Management (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
- Indicating And Signalling Devices For Elevators (AREA)
Abstract
エレベーター(20)の駆動制御を行うエレベーター制御装置(200)と、エレベーター制御装置(200)と通信し、エレベーター(20)に故障の復旧動作を行わせる遠隔復旧装置(300)と、を備え、エレベーター制御装置(200)は、エレベーター(20)の故障を検出した際にエレベーター(20)の故障コードを含む故障信号を発信し、遠隔復旧装置(300)は、故障信号を受信した際に、故障信号に含まれる故障コードに対応する復旧指令と復旧診断指令とをエレベーター制御装置(200)に発信し、エレベーター制御装置(200)にエレベーター(20)の復旧動作と復旧診断動作とを実行させる。これにより、エレベーターの運行サービス向上を図る。 An elevator control device (200) that controls the drive of the elevator (20), and a remote recovery device (300) that communicates with the elevator control device (200) and causes the elevator (20) to perform a failure recovery operation, When the elevator control device (200) detects a failure of the elevator (20), the elevator control device (200) transmits a failure signal including a failure code of the elevator (20), and when the remote recovery device (300) receives the failure signal, A restoration command and a restoration diagnosis command corresponding to the failure code included in the failure signal are transmitted to the elevator control device (200), and the elevator control device (200) executes the restoration operation and the restoration diagnosis operation of the elevator (20). . This will improve the elevator service.
Description
本発明は、エレベーターで故障が発生した際に遠隔復旧を行うシステムに関する。 The present invention relates to a system for performing remote recovery when a failure occurs in an elevator.
従来から、エレベーターの駆動制御を行う制御盤に接続され、エレベーターが故障した際にエラーコードを含む故障信号を発信する通信端末と、通信端末から発信された故障信号を受信してエラーコードに該当する故障履歴データを検索して保守員の持つ携帯端末に送信する監視センターとを備え、保守員の持つ携帯端末が監視センターから受信したエラーコードを解析して故障原因毎の復旧内容として表示するエレベーターの故障復旧支援システムが知られている(例えば、特許文献1参照)。特許文献1に記載された故障復旧支援システムは、保守員が故障の発生したエレベーターに到着する前に、エレベーターの故障内容を知ることができ、建物に到着後すぐに復旧作業を進めることができ復旧作業を効率的に行うことを可能とする。
Conventionally connected to the control panel that controls the drive of the elevator, and when the elevator breaks down, a communication terminal that transmits a failure signal including an error code, and a failure signal transmitted from the communication terminal is received and corresponds to the error code A monitoring center that searches for failure history data to be transmitted and sends it to the mobile terminal held by maintenance personnel, analyzes the error code received by the mobile terminal owned by the maintenance personnel from the monitoring center, and displays it as recovery contents for each cause of failure An elevator failure recovery support system is known (see, for example, Patent Document 1). The failure recovery support system described in
しかし、特許文献1に記載されたシステムでは、エレベーターが故障した場合には、保守員あるいは技術者が現場に出動してエレベーターを復旧する必要があるため復旧までに時間がかかり、エレベーターの運行サービスが低下してしまうという問題がある。一方で、近年、エレベーターの運行サービス向上の要求は益々高くなってきている。
However, in the system described in
そこで、本発明は、エレベーターの運行サービス向上を図ることを目的とする。 Accordingly, an object of the present invention is to improve an elevator service.
本発明のエレベーター故障の遠隔復旧システムは、エレベーターの駆動制御を行うエレベーター制御装置と、前記エレベーター制御装置と通信し、前記エレベーターに故障の復旧動作を行わせる遠隔復旧装置と、を備え、前記エレベーター制御装置は、前記エレベーターの故障を検出した際に前記エレベーターの故障コードを含む故障信号を発信し、前記遠隔復旧装置は、前記故障信号を受信した際に、前記故障信号に含まれる故障コードに対応する復旧指令と復旧診断指令とを前記エレベーター制御装置に発信し、前記エレベーター制御装置に前記エレベーターの復旧動作と復旧診断動作とを実行させることを特徴とする。 An elevator failure remote recovery system according to the present invention includes an elevator control device that performs drive control of an elevator, and a remote recovery device that communicates with the elevator control device and causes the elevator to perform a failure recovery operation. The control device transmits a failure signal including the failure code of the elevator when the failure of the elevator is detected, and the remote recovery device outputs a failure code included in the failure signal when the failure signal is received. A corresponding restoration command and restoration diagnosis command are transmitted to the elevator control device, and the elevator control device is caused to execute the restoration operation and the restoration diagnosis operation of the elevator.
本発明のエレベーター故障の遠隔復旧システムにおいて、前記遠隔復旧装置の発信する前記復旧指令は、前記故障コードに対応する複数の故障要因の内で件数の多い故障要因に応じた指令、または、前記故障コードに対応する複数の復旧指令の内で、その復旧指令によって前記エレベーターが復旧した割合である復旧率が高い指令であり、前記復旧診断指令は、前記復旧指令に対応する指令としてもよい。 In the remote recovery system for an elevator failure according to the present invention, the recovery command transmitted by the remote recovery device is a command corresponding to a large number of failure factors among a plurality of failure factors corresponding to the failure code, or the failure Of the plurality of recovery commands corresponding to the code, the recovery command is a command having a high recovery rate, which is the rate at which the elevator is recovered by the recovery command, and the recovery diagnosis command may be a command corresponding to the recovery command.
本発明のエレベーター故障の遠隔復旧システムにおいて、前記復旧指令は、前記故障コードに対応する複数の故障要因の内で件数が最も多い故障要因に応じた指令、または、前記故障コードに対応する複数の復旧指令の内で、その復旧指令によって前記エレベーターが復旧した割合である復旧率が最も高い指令としてもよい。 In the elevator failure remote recovery system according to the present invention, the recovery command may be a command corresponding to a failure factor having the largest number of failures among a plurality of failure factors corresponding to the failure code, or a plurality of failures corresponding to the failure code. Of the recovery commands, the command may have the highest recovery rate, which is the rate at which the elevator is recovered by the recovery command.
本発明のエレベーター故障の遠隔復旧システムにおいて、前記エレベーター制御装置は、前記復旧指令に応じて実行した復旧動作の後、前記復旧診断動作によって前記エレベーターが復旧したかどうかを判定し、判定結果を前記遠隔復旧装置に送信してもよい。 In the elevator fault remote recovery system of the present invention, the elevator control device determines whether the elevator has been recovered by the recovery diagnosis operation after the recovery operation executed in response to the recovery command, and the determination result is It may be sent to the remote recovery device.
本発明のエレベーター故障の遠隔復旧システムにおいて、前記遠隔復旧装置は、前記故障コードと、前記故障コードに対応する前記故障要因の件数と、前記復旧指令と、前記復旧診断指令と、を対応づけた復旧診断データベースを備え、前記エレベーター制御装置が送信した前記エレベーターが復旧したかどうかの前記判定結果に基づいて、前記故障コードに対応する前記故障要因の件数を更新してもよい。 In the remote recovery system for an elevator failure according to the present invention, the remote recovery device associates the failure code with the number of failure factors corresponding to the failure code, the recovery command, and the recovery diagnosis command. A restoration diagnosis database may be provided, and the number of failure factors corresponding to the failure code may be updated based on the determination result of whether or not the elevator has been transmitted transmitted by the elevator control device.
本発明のエレベーター故障の遠隔復旧システムにおいて、前記復旧診断データベースは、前記故障コードと、前記故障コードに対応する前記故障要因の件数と、前記復旧指令と、前記復旧診断指令と、前記復旧率とを対応づけたものであり、前記エレベーター制御装置が送信した前記エレベーターが復旧したかどうかの前記判定結果に基づいて、前記故障コードに対応する前記故障要因の件数および前記復旧率を更新してもよい。 In the elevator failure remote recovery system of the present invention, the recovery diagnosis database includes the failure code, the number of failure factors corresponding to the failure code, the recovery command, the recovery diagnostic command, and the recovery rate. And the number of failure factors corresponding to the failure code and the recovery rate may be updated based on the determination result of whether or not the elevator transmitted from the elevator control device has been recovered. Good.
本発明は、エレベーターの運行サービス向上を図ることができる。 The present invention can improve an elevator service.
以下、図面を参照しながら本実施形態のエレベーター故障の遠隔復旧システム100について説明する。図1に示すように、遠隔復旧システム100は、ビル10の昇降路11の中に配置されたエレベーター20の駆動制御を行うエレベーター制御装置200と、エレベーター制御装置200と通信し、エレベーター20に故障の復旧動作を行わせる遠隔復旧装置300とを備えている。遠隔復旧装置300が復旧動作を行わせるエレベーター20は、1台でもよいし複数台であってもよい。また、エレベーター20が複数の場合には、各エレベーター20は同一のビル10に設置されていてもよいし、異なるビル10に設置されていてもよい。
Hereinafter, an elevator failure
エレベーター制御装置200は、エレベーター20の駆動制御を行う制御盤210と通信装置250とを含んでいる。制御盤210は内部にCPUとメモリとを含むコンピュータである。また、遠隔復旧装置300は、通信装置320と監視盤330を含む遠隔監視センター310と、情報処理装置360と、保守データベース370と、復旧診断データベース380とを含んでいる。遠隔監視センター310と情報処理装置360と保守データベース370と復旧診断データベース380とは同じ場所に設置されていてもよいし、別々の場所に設置されてお互いをインターネット回線等によって接続するようにしてもよい。
The
通信装置250は、制御盤210に接続され、制御盤210からの出力を通信ネットワーク30に発信する。また、通信装置250は、情報処理装置360が復旧診断データベース380を参照して選択した制御盤210に対する指令を通信装置320、通信ネットワーク30を介して受信し、制御盤210に出力する。通信装置320は、制御盤210からの信号を通信装置250、通信ネットワーク30を介して受信し、情報処理装置360に出力する。また、通信装置320は、情報処理装置360が選択した制御盤210に対する指令を通信ネットワーク30に発信する。通信装置250、320は無線通信を行う機器であってもよいし有線通信を行う機器であってもよい。また、通信ネットワーク30は、インターネット通信網であってもよいし、電話回線網であってもよい。
The
遠隔監視センター310は、情報処理装置360とデータの授受を行い、エレベーター20の運行状況、故障状況を監視する監視盤330が配置されている。監視盤330には、エレベーター20の運行状況、故障状況、情報処理装置360からの通知等が表示されるディスプレイ331と、ディスプレイ331の表示を操作するスイッチ332とが設けられている。また、監視盤330には通信ネットワーク35を介してサービスセンター340との通信を行う電話333が備えられている。
The
保守データベース370は、エレベーター20の仕様や検査、保守、修理等の履歴データが格納されている。復旧診断データベース380は、エレベーター20の制御盤210から出力された故障コードに対応する複数の故障要因とその件数および復旧率等のデータが格納されている。
The
情報処理装置360は、内部にCPUとメモリとを含むコンピュータである。情報処理装置360には、エレベーター20に故障が発生した際に制御盤210が出力する故障信号が通信装置250、320、通信ネットワーク30を介して入力される。情報処理装置360は、故障信号が入力されると復旧診断データベース380のデータを参照して故障信号に含まれる故障コードに対応する復旧指令と復旧診断指令を選択する。選択された復旧指令と復旧診断指令とは、通信装置250、320と通信ネットワーク30を介して制御盤210に入力され、エレベーター20に復旧動作、復旧診断動作を実行させる。
The
図2に示すように、保守データベース370には、エレベーター仕様データ371、検査履歴データ372、保守作業履歴データ373、遠隔点検履歴データ374、変調履歴データ375、修理工事履歴データ376、故障履歴データ377、故障要因別データ378が格納されている。
As shown in FIG. 2, the
以下、図3を参照しながら、エレベーター仕様データ371、検査履歴データ372、保守作業履歴データ373、遠隔点検履歴データ374、変調履歴データ375、修理工事履歴データ376、故障履歴データ377、故障要因別データ378のデータ構造について説明する。
Hereinafter, with reference to FIG. 3,
エレベーター仕様データ371は、エレベーター20の管理番号、機種、製造日、製造番号、設置ビルの名称、設置ビルの用途のデータを格納するデータ構造を有している。設置ビルの用途とは、例えば、事務所、一般居住用、飲食店、学校等である。
The
検査履歴データ372は、エレベーター20の管理番号、技術者350が現地で行った検査の日時、検査項目、検査結果のデータを格納するデータ構造を有している。検査とは、例えば、図1に示すエレベーター20のドア13、26の開閉状態の検査、各階の停止位置の検査(階床12とカゴ22の床27との高さずれ量の点検)、ワイヤ23の検査、走行速度の検査等である。また、検査結果には、検査の結果、異常が発見されたかどうかや、異常は発見されなかったが清掃等の保守作業が必要、あるいは、近々部品交換が必要である等が入力されている。なお、図1において符号25は錘を示す。
The
保守作業履歴データ373は、エレベーター20の管理番号、技術者350が現場で行ったエレベーター20の保守作業日時、保守作業項目、保守作業結果を格納するデータベース構造を有している。保守作業項目とは、例えば、エレベーター20の運転状態の点検、エレベーター20のドアレールの清掃、図1に示す駆動装置24への給油、エレベーター20のブレーキの調整等である。保守作業結果には、点検、清掃、給油、調整等を実施した実績が入力されている。
The maintenance
遠隔点検履歴データ374は、エレベーター20の管理番号、遠隔点検日時、遠隔点検項目、遠隔点検結果を格納するデータ構造を有している。エレベーター20の遠隔点検は、例えば、一か月に1回等予め設定されたスケジュールに従って、エレベーター20の制御盤210によって実施される。エレベーター20の制御盤210は、図1に示すエレベーター20のカゴ22を所定の階に移動させる。この移動の際にエレベーター20に取り付けられた各種のセンサによって運転性能(加速度、異常音の有無)、ドア開閉、ブレーキ、非常用バッテリ、外部連絡装置等に異常がないかを点検する。その点検結果を通信装置250、320、通信ネットワーク30を介して情報処理装置360から遠隔点検履歴データ374に格納するものである。なお、遠隔点検は、遠隔監視センター310からの指示によって行うようにしてもよい。
The remote
変調履歴データ375は、エレベーター20の管理番号、変調発生日時、変調項目、変調対応結果を格納するデータ構造を有している。エレベーター20の変調とは、技術者350による検査、点検、保守作業、あるいは遠隔点検の結果が異常値には達しないが、そのエレベーター20の通常の値よりも変化しているような場合をいう。例えば、走行速度の検査を行った結果、許容値内に入っているが、前回点検の際、あるいはそのエレベーター20の今までの検査結果の値からのずれが大きいような場合に、変調項目の中に「走行速度」と記録される。
The
修理工事履歴データ376は、エレベーター20の管理番号、修理工事日時、修理工事項目、修理工事結果を格納するデータ構造を有している。修理工事とは、ワイヤ23の交換、ハンガローラ交換、ブレーキパッド交換、制御基板交換、リレー交換等の部品交換による復旧工事である。従って、修理工事項目には、「ワイヤ交換」、「ハンガローラ交換」、「ブレーキパッド交換」等の交換部品の名称が入力され、修理工事結果の欄には、「修理工事終了」、「再修理必要」等の事項が入力される。
The repair
故障履歴データ377は、エレベーター20の管理番号、故障発生日時、故障コード、復旧方法、復旧判定結果を格納するデータ構造を有している。故障コードとは、エレベーター20に故障が発生した際に制御盤210から出力される数字あるいは数字と英文字とを組み合わせたコードである。故障コードの種類は、例えば、1000種類程度である。復旧方法の項目には、例えば、技術者350が出動して検査、点検、復旧を行った場合には「技術者出動」のように入力される。また、復旧方法の項目には、例えば、遠隔復旧システム100によって復旧した場合には「遠隔復旧」のように入力される。復旧判定結果の項目には、エレベーター20が復旧して運行再開した場合には、「復旧」のように入力される。また、復旧判定結果の項目には、エレベーター20が復旧に失敗した場合には、「失敗」のように入力される。
The
故障要因別データ378は、ある故障コードが制御盤210から出力された際に、技術者350が現場に出動して検査、点検した結果によるその故障コードに対応する故障要因の件数、および、遠隔復旧システム100で復旧した場合のその故障コードに対応する故障要因の件数の合計件数が格納されている。例えば、故障コードがドア13、26に関する故障を示す0001の場合、技術者350が現地で点検した結果、その故障コード「0001」の出力された要因がドア敷居のゴミ詰まり(故障要因1)であったり、ドア開閉装置のスイッチの接触不良(故障要因2)であったり、その他の故障要因3であったりする。そこで、故障要因別データは、故障コード「0001」が出力された場合、ドア敷居のゴミ詰まり要因(故障要因1)の場合が100件、ドア開閉装置のスイッチの接触不良が要因(故障要因2)の場合が50件、その他の故障要因3の場合が10件というようなデータ構造で、その件数が多い順にデータが並べられるように構成されている。遠隔復旧システム100による復旧の場合、復旧指令によってエレベーター20の復旧に成功した場合にその復旧指令の基礎となった故障コードに対応する故障要因の件数が全体の故障要因の件数に追加される。
The failure factor-
図4に示すように、復旧診断データベース380は、故障要因別データ378の故障要因の件数の多い順に、復旧指令と復旧診断指令のセットである復旧診断指令セットと、その復旧指令の実行によってエレベーター20の故障が復旧した割合である復旧率(%)が格納されている。復旧診断データベース380は、先に説明した故障要因別データ378に復旧診断指令セットと復旧率とをリンクさせたデータベースである。
As shown in FIG. 4, the
以下、故障コードがドア13、26に関する故障を示す「0001」の場合の復旧診断データベース380のデータ構成について説明する。ドア敷居のゴミ詰まりが要因(故障要因1)の場合、復旧診断データは、故障要因1の件数データに復旧指令として「ドア回路リセット+ドア高トルク開閉」、復旧診断指令として「ドア開閉診断」、の2つの指令のセットである復旧診断指令セットAと、この復旧指令による復旧動作による復旧率x%とをリンクさせたデータ構成となっている。同様に、ドア開閉装置のスイッチの接触不良が要因(故障要因2)の場合には、復旧診断データは、故障要因2の件数データに復旧指令として「ドア回路リセット+ドア開閉リトライ」、復旧診断指令として「ドア開閉診断」の2つの指令のセットである復旧診断指令セットBと、この復旧指令による復旧動作の復旧率y%とをリンクさせたデータ構成となっている。同様に、故障要因3の場合には、復旧診断データは、故障要因3の件数データに復旧診断指令セットCと復旧率z%とをリンクさせたデータ構成となっている。このように、復旧診断データベース380は、故障コードと、その故障コードに対応する故障要因と、その故障要因の件数と、復旧指令と復旧診断のセットである復旧診断指令セットと、復旧率とを対応づけてデータベースに格納したものである。なお、本実施形態では、復旧率y%は復旧率x%、z%よりも大きな数値であり、復旧診断指令セットBは復旧診断指令セットA、復旧診断指令セットCよりも復旧率が高くなっている。
Hereinafter, the data configuration of the
以下、図2および図5、図6を参照して、エレベーター20から故障信号が発信された場合の遠隔復旧システム100の動作について説明する。以下の説明では、最初にドア13、26に関する故障コード信号「0001」が発信された場合の遠隔復旧動作について説明する。次に、制御盤210の中に組み込まれている制御回路に関する故障コード「0002」が発信された場合の遠隔復旧動作について説明する。その次に、駆動装置24の中のブレーキに関する故障コード「0003」が発信された場合の遠隔復旧動作について説明する。なお、遠隔復旧システム100は、上記以外の部分に関する故障コードが発信された場合にも対応可能である。
Hereinafter, the operation of the
図2および図5のステップS101に示すように、エレベーター20の制御盤210は、エレベーター20に故障が発生した否かの判断を行う。エレベーター20のドア13、26に関する故障、例えば、ドア開閉不良等の故障が発生した場合、制御盤210は、故障発生日時と故障がドアに関する故障であることを示す故障コード「0001」を通信装置250に出力する。エレベーター20に故障が発生しない場合には、制御盤210は、ステップS101の最初に戻ってエレベーター20の監視を継続する。
As shown in step S <b> 101 of FIGS. 2 and 5, the
通信装置250は制御盤210から故障コード「0001」が入力されると、図2および図5のステップS102に示すように、故障コード「0001」およびエレベーター20の管理番号および故障発生日時を含む故障信号を通信ネットワーク30に発信する。図2および図5のステップS103に示すように、遠隔監視センター310の通信装置320は、通信ネットワーク30を介して通信装置250が発信した故障信号を受信する。通信装置320は、故障信号を受信すると、故障信号に含まれる故障コード「0001」とエレベーター20の管理番号、および、故障発生日時を情報処理装置360に出力する。情報処理装置360は、入力された故障コード「0001」とエレベーター20の管理番号、故障発生日時を保守データベース370の故障履歴データ377に格納する。
When the failure code “0001” is input from the
そして、情報処理装置360は、図5のステップS104に示すように、故障の発生したエレベーター20が遠隔復旧可能かどうかを判断する。情報処理装置360は、図2および図3に示すように、エレベーター20の管理番号を用いてエレベーター仕様データ371からエレベーター20の機種、製造日、製造番号を取得する。情報処理装置360は、取得した仕様データに基づいて、そのエレベーター20が遠隔復旧装置300からの復旧指令、復旧診断指令によって復旧動作、復旧診断動作が可能な仕様であるかどうか確認する。情報処理装置360は、エレベーター20が遠隔復旧動作の不可能な機種である場合には、図2および図5のステップS124に示すように、遠隔監視センター310に遠隔復旧不可を通知する信号を出力する。
Then, the
また、情報処理装置360は、図2に示すように、検査履歴データ372、保守作業履歴データ373、遠隔点検履歴データ374、変調履歴データ375、修理工事履歴データ376、故障履歴データ377を参照して、以下の(a)〜(f)について確認する。
(a)エレベーター20が最近の検査で調整手直し指示があったものである。
(b)エレベーター20が最近、あるいは、当日に保守計画があり調整ミスの可能性が予測されるものである。
(c)遠隔点検でエレベーター20に異常の診断結果があった。
(d)最近、エレベーター20に変調の発生があった。
(e)エレベーター20が、最近、修理工事が実施されているものである。
(f)エレベーター20が、最近、同様の故障コード「0001」による故障信号を発信している。Further, as shown in FIG. 2, the
(A) The
(B) The
(C) There was an abnormality diagnosis result in the
(D) Recently, the
(E) The
(F) The
そして、上記(a)〜(f)のいずれか1つまたは複数に該当する場合には、情報処理装置360は、遠隔復旧システム100による復旧よりも技術者350をビル10に派遣した方が良いと判断し、図5のステップS104でNOと判断する。そして、図2および図5のステップS124に示すように、情報処理装置360は、遠隔監視センター310に遠隔復旧不可の通知を出力する。
If any one or more of the above (a) to (f) is applicable, the
更に、情報処理装置360は、エレベーター20の管理番号を用いてエレベーター仕様データ371と故障履歴データ377から、ビル10が故障信号の誤発信の多い建物であるかを確認する。このような場合には、情報処理装置360は、故障信号の誤発信の可能性が大きいので、遠隔復旧システム100による復旧よりも技術者350をビル10に派遣した方が良いと判断し、図5のステップS104でNOと判断する。そして、情報処理装置360は、図2および図5のステップS124に示すように、遠隔監視センター310に遠隔復旧不可の通知を出力する。
Furthermore, the
情報処理装置360から遠隔監視センター310に出力された遠隔復旧不可の通知は、図2に示すように、遠隔監視センター310のディスプレイ331に表示される。監視者334は、この表示を確認したら、図2および図6のステップS125に示すように、エレベーター20の運行休止の指示、および、アナウンス動作を行わせる。そして、監視者334は、電話333によって図2および図6のステップS126に示すように、ビル10近隣のサービスセンター340に技術者350をビル10に派遣するように指示する。
The notification that remote recovery is not possible, which is output from the
図5のステップS104でエレベーター20が遠隔復旧不可との判断をした場合は、情報処理装置360はステップS103において、入力された故障コード「0001」とエレベーター20の管理番号、故障発生日時を保守データベース370の故障履歴データ377に格納する。そして、情報処理装置360は、保守データベース370の他のデータの更新、並びに、復旧診断データベース380の更新は行わずに遠隔復旧動作を終了する。
When it is determined in step S104 in FIG. 5 that the
一方、図5に示すステップS104において、情報処理装置360は、図2に示すように、検査履歴データ372、保守作業履歴データ373、遠隔点検履歴データ374、変調履歴データ375、修理工事履歴データ376、故障履歴データ377を参照して以下の(g)〜(n)について確認する。
(g)エレベーター20が遠隔復旧装置300からの復旧指令、復旧診断指令によって復旧動作、復旧診断動作が可能な仕様である。
(h)エレベーター20が最近の検査で調整手直し指示があったものではない。
(i)エレベーター20が、最近、あるいは、当日に保守計画がなく調整ミスの可能性が予測されるものではない。
(j)遠隔点検でエレベーター20に異常の診断結果がない。
(k)最近、エレベーター20に変調の発生がない。
(l)エレベーター20が、最近、修理工事が実施されているものではない。
(m)エレベーター20が、最近、同様の故障コード「0001」による故障信号を発信していない。
(n)ビル10が故障信号の誤発信の多い建物ではない。On the other hand, in step S104 shown in FIG. 5, the
(G) It is a specification that allows the
(H) The
(I) The
(J) There is no abnormality diagnosis result in the
(K) Recently, there is no modulation in the
(L) The
(M) The
(N) The
そして、上記(g)〜(n)の全ての要件を満たす場合には、情報処理装置360は、図5に示すステップS104でYESと判断し、ステップS105で遠隔監視センター310に遠隔復旧開始を通知する。この信号は、遠隔監視センター310のディスプレイ331に表示される。これにより遠隔監視センター310の監視者334にエレベーター20の遠隔復旧が開始されることが通知される。
If all the requirements (g) to (n) are satisfied, the
情報処理装置360は、ステップS105で遠隔監視センター310に遠隔復旧開始を通知したら、図5に示すステップS106に進み、故障コード「0001」に対応する復旧指令と復旧診断指令を選択する。先に、図4を参照して説明したように、復旧診断データベース380は、故障要因別データ378に復旧診断指令セットと復旧率とをリンクさせたデータベースである。以下、故障コードがドア13、26に関する故障を示す「0001」の場合の復旧診断データベース380のデータ構成について再度簡単に説明しておく。ドア敷居のゴミ詰まりが要因(故障要因1)の場合には、復旧診断データは、故障要因1の件数データに復旧指令として「ドア回路リセット+ドア高トルク開閉」、復旧診断指令として「ドア開閉診断」、の2つの指令のセットである復旧診断指令セットAと、この復旧指令による復旧動作による復旧率x%とをリンクさせたデータ構成となっている。同様に、ドア開閉装置のスイッチの接触不良が要因(故障要因2)の場合には、復旧診断データは、故障要因2の件数データに復旧指令として「ドア回路リセット+ドア開閉リトライ」、復旧診断指令として「ドア開閉診断」の2つの指令のセットである復旧診断指令セットBと、この復旧指令による復旧動作の復旧率y%とをリンクさせたデータ構成となっている。同様に故障要因3の場合には、復旧診断データは、故障要因3の件数データに復旧診断指令セットCと復旧率z%とをリンクさせたデータ構成となっている。また、先に説明したように、復旧率y%は復旧率x%、z%よりも大きな数値であり、復旧診断指令セットBは復旧診断指令セットA、復旧診断指令セットCよりも復旧率が高くなっている。
When the
情報処理装置360は、故障コード「0001」に対応する複数の故障要因の内の件数が最も多い故障要因に応じた指令を復旧指令として選択してもよい。また、情報処理装置360は、故障コード「0001」に対応する複数の指令の内の復旧率が最も高い指令を復旧指令として選択してもよい。そして情報処理装置360は、選択した復旧指令に対応する復旧診断指令が選択した復旧指令とセットとなっている復旧診断指令セットを選択する。
The
まず、情報処理装置360が、故障コード「0001」に対応する複数の故障要因の内で件数が最も多い故障要因に応じた指令を復旧指令として選択する場合について説明する。情報処理装置360は、復旧診断データベース380を参照して、復旧指令として故障コード「0001」の場合に最も件数の多い故障要因を確認する。そして、情報処理装置360は、最も件数の多い故障要因であるドア敷居のゴミ詰まり(故障要因1)に対応する復旧動作を実行させる復旧指令である「ドア回路リセット+ドア高トルク開閉」と、この復旧動作の結果に対応する復旧診断動作を実行させる復旧診断指令である「ドア開閉診断」の2つからなる復旧診断指令セットAを選択する。
First, a case will be described in which the
次に、情報処理装置360が、故障コード「0001」に対応する複数の指令の内の復旧率が最も高い指令を復旧指令として選択する場合について説明する。情報処理装置360は、復旧診断データベース380を参照して、復旧指令として故障コード「0001」に対応する復旧率が最も高い復旧率を確認する。そして、情報処理装置360は、最も高い復旧率y%であるスイッチの接触不良が要因(故障要因2)に対応する復旧動作を実行させる復旧指令である「ドア回路リセット+ドア開閉リトライ」と、この復旧動作の結果に対応する復旧診断動作を実行させる復旧診断指令である「ドア開閉診断」の2つからなる復旧診断指令セットBを選択する。
Next, a case where the
復旧診断指令セットを選択する場合、故障コード「0001」に対応する最も件数の多い故障要因に基づくか、故障コード「0001」に対応する復旧診断指令セットの復旧率に基づくかの選択は次のように行ってもよい。例えば、最大件数と次の件数との比率(件数比率)と最大復旧率と次の復旧率の比率(復旧率比率)のうち、比率が大きくなっている方、つまり、次の数値に対して最大値が突出している方を選択してもよい。また、例えば、前回の遠隔復旧で失敗した場合には、前回と異なる選択方法をとるようにしてもよい。また、復旧診断指令セットの選択は、例えば、エレベーター20の機種、仕様等によって決定してもよい。
When selecting a recovery diagnosis command set, the selection of whether to be based on the most frequent failure factor corresponding to the failure code “0001” or based on the recovery rate of the recovery diagnosis command set corresponding to the failure code “0001” is as follows: You may do as follows. For example, of the ratio of the maximum number of cases to the next number of cases (number of cases ratio) and the ratio of the maximum recovery rate and the next recovery rate (recovery rate ratio), You may select the one where the maximum value protrudes. Further, for example, if the previous remote recovery has failed, a different selection method may be used. Further, the selection of the restoration diagnosis command set may be determined by, for example, the model and specification of the
以下の説明では、情報処理装置360が故障コード「0001」に対応する最も件数の多い故障要因1に基づいて復旧診断指令セットAを選択した場合について説明する。
In the following description, a case will be described in which the
図5のステップS106で復旧診断指令セットAを選択したら、情報処理装置360は、図2および図5のステップS107に示すように、選択した復旧診断指令セットAを通信装置320から発信する。図2および図5のステップS108に示すように、通信装置250は、通信装置320から復旧診断指令セットAを受信したら、復旧指令と復旧診断指令とを制御盤210に出力する。
When the restoration diagnosis command set A is selected in step S106 in FIG. 5, the
制御盤210は、まず、図5のステップS109に示すように、エレベーター20が停止していること、カゴ22の重量センサ、カゴ22内のカメラ、カゴ22内の人物センサ等の出力からカゴ22の中に乗客がいないことを確認する。そして、制御盤210は、エレベーター20が停止していること、カゴ22の中に乗客がいないことを確認したら、カゴ22の中に設置された通話装置のスピーカーから「これから遠隔復旧を開始します。エレベーターのドアが開閉します。」等のアナウンスを行う。
First, as shown in step S109 of FIG. 5, the
制御盤210は、アナウンスが終了したら、図5のステップS110に進み、復旧指令に従って復旧動作を実行する。いま、受信している復旧指令は、ドア敷居のゴミ詰まり(故障要因1)に対応する復旧動作を実行させる復旧指令である「ドア回路リセット+ドア高トルク開閉」であるから、制御盤210は、まず、制御盤210のドア回路をリセットする。この動作は、ドア回路がドア13またはドア26が開閉不能で、開(または閉)状態、あるいは半開(または半閉)状態を検知している状態をリセットし、ドア13またはドア26を開閉動作可能とする動作である。次に、制御盤210は、ドア13およびドア26の駆動モータのトルクを通常よりも20〜30%高くして通常よりも大きな力でドア13およびドア26を開閉動作させる。この動作は、ドアの敷居に詰まっていたゴミを敷居から移動させ、ドア13、26の開閉動作を通常状態に復旧する動作である。上記動作によってドア13、26の敷居に詰まっていたゴミが移動し、ドア13、26の開閉が復旧したかどうかを確認するため、制御盤210は、図5のステップS111に示すように、復旧診断指令である「ドア開閉診断」を実行する。制御盤210は、通常のトルクでドア13およびドア26の開閉を行い、所定の開閉時間で開閉動作ができているか、ドア13およびドア26の駆動モータの電流が通常よりも大きくなっていないかを確認する。次に制御盤210は、駆動モータのトルクを通常よりも20%程度低くしてドア13およびドア26を開閉し、開閉時間に異常がないかを確認する。
When the announcement ends, the
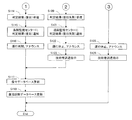
そして、制御盤210は、図5のステップS112に示すように、復旧診断動作によってドア13、26が通常状態に復旧したと判断した場合には、図5のステップS113に進む。ステップS113において、制御盤210は、エレベーター20が復旧したという判定結果信号を出力する。この信号は、通信装置250から通信ネットワーク30に発信される。発信された判定結果信号は、図6のステップS114に示すように通信装置320で受信され、判定結果は情報処理装置360に入力される。また、判定結果は、図6のステップS115に示すように、情報処理装置360から遠隔監視センター310に通知され、その結果が遠隔監視センター310のディスプレイ331に表示される。遠隔監視センター310の監視者334は、この表示を確認したら、図6のステップS116に示すように、エレベーター20の運行再開、および、アナウンス動作を行わせる。また、情報処理装置360は、図6のステップS117、ステップS118に示すように、保守データベース370と、復旧診断データベース380とを更新する。
When the
一方、制御盤210は、復旧診断動作の結果、図5のステップS112でNOと判断した場合には、図5のステップS119に進む。ステップS119において制御盤210は、エレベーター20の復旧に失敗したという判定結果信号を出力する。この信号は、通信装置250から通信ネットワーク30に発信される。発信された判定結果信号は、図6のステップS120に示すように通信装置320で受信され、判定結果は情報処理装置360に入力される。また、判定結果は、図6のステップS121に示すように、情報処理装置360から遠隔監視センター310に通知され、その結果が遠隔監視センター310のディスプレイ331に表示される。監視者334は、この表示を確認したら、図6のステップS122に示すように、エレベーター20の運行休止の指示、および、アナウンス動作を行わせる。また、監視者334は、電話333によって図2および図6のステップS123に示すように、ビル10近隣のサービスセンター340に技術者350をビル10に派遣するように指示する。また、情報処理装置360は、図6のステップS117、ステップS118に示すように、保守データベース370と、復旧診断データベース380とを更新する。
On the other hand, if the result of the recovery diagnosis operation is NO in step S112 of FIG. 5, the
情報処理装置360は、図5のステップS113に示すようなエレベーター20が復旧したという判定信号が入力された場合、次のように、保守データベース370を更新する。
When the determination signal that the
図5のステップS113に示すようなエレベーター20が復旧したという判定信号が入力された場合には、情報処理装置360は、故障履歴データ377の復旧方法の項目に「遠隔復旧」、復旧判定結果の項目に「復旧」を格納する。先に、説明したように、通信装置320が故障信号を受信した際に、情報処理装置360は、通信装置320から入力された故障コード「0001」とエレベーター20の管理番号、故障発生日時を保守データベース370の故障履歴データ377に格納している。従って、今回の復旧方法、復旧判定結果の格納により、故障履歴データ377の全ての項目が更新されることになる。
When a determination signal indicating that the
また、今回の遠隔復旧において情報処理装置360は、復旧診断データベース380を参照して、復旧指令として故障コード「0001」の場合に最も件数の多い故障要因であるドア敷居のゴミ詰まり(故障要因1)に対応する復旧動作を実行させる復旧指令である「ドア回路リセット+ドア開閉リトライ」と、この復旧動作の結果に対応する復旧診断動作を実行させる復旧診断指令である「ドア開閉診断」の2つからなる復旧診断指令セットAを選択して復旧動作および復旧診断動作を実行させている。従って、エレベーター20の復旧に成功した場合には、復旧診断データベース380の故障コード「0001」、故障要因1(ドア敷居のゴミ詰まり)の件数を1件多くし、復旧に成功した分だけ復旧率を高くする。また、情報処理装置360は、故障要因別データ378の故障コード「0001」の故障要因1の件数を1件多くする。
Further, in this remote recovery, the
一方、情報処理装置360は、図5のステップS119に示すようなエレベーター20の復旧に失敗したという判定信号が入力された場合、次のように、保守データベース370と復旧診断データベース380を更新する。図5のステップS119に示すようなエレベーター20の復旧に失敗したという判定信号が入力された場合には、情報処理装置360は、故障履歴データ377の復旧方法の項目に「遠隔復旧」、復旧判定結果の項目に「失敗」を格納する。また、復旧診断データベース380の故障コード「0001」、故障要因1(ドア敷居のゴミ詰まり)の件数はそのままとし、復旧に失敗した分だけ復旧率を低下させる。なお、復旧に失敗した場合には、故障要因別データ378の故障コード「0001」の故障要因1の件数は変更されない。
On the other hand, the
以上の説明では、情報処理装置360が故障コード「0001」に対応する最も件数の多い故障要因に基づいて復旧診断指令セットAを選択した場合について説明した。情報処理装置360が故障コード「0001」に対応する復旧診断指令セットの復旧率に基づいて復旧診断指令セットBを選択した場合には、「ドア高トルク開閉」の復旧動作に代えて、通常のトルクでドア13、26の開閉動作を再度行う「ドア開閉リトライ」の復旧動作を行う点が異なる。その他の動作は復旧診断指令セットAを選択した場合と同様である。
In the above description, a case has been described in which the
エレベーター20の遠隔復旧に成功すると、それまで、故障コード「0001」の場合に最も件数の多い故障要因であったドア敷居のゴミ詰まり(故障要因1)の件数が多くなる。このため、遠隔復旧システム100が故障コード「0001」に対応する最も件数の多い故障要因に基づいて復旧診断指令セットを選択する場合、次の遠隔復旧の際に故障コード「0001」が入力された際に、情報処理装置360は、再度、復旧診断指令セットAを選択する。また、復旧診断指令セットAの復旧率が復旧診断指令セットBの復旧率よりも高くなった場合には、情報処理装置360が故障コード「0001」に対応する複数の指令の内で復旧率が最も高い指令を復帰指令として選択する場合でも、復旧診断指令セットAを選択する。
If the remote recovery of the
一方、エレベーター20の遠隔復旧に失敗すると、故障要因別データ378の故障コード「0001」の故障要因1の件数は変更されないが、復旧診断指令セットAの復旧率が低下する。これにより、復旧診断指令セットBの復旧率が相対的に高くなる。つまり、復旧診断指令セットBの復旧診断指令セットAに対する復旧率比率が高くなる。この復旧率比率が故障要因2の件数に対する故障要因1の件数の比率として計算される件数比率よりも大きくなると、情報処理装置360は、故障コード「0001」に対応する複数の指令の内で復旧率が最も高い指令を復帰指令として選択するようになる。このため、情報処理装置360は、次の遠隔復旧の際に故障コード「0001」が入力された場合には、復旧率が最も高い復旧診断指令セットBを選択する。また、情報処理装置360が前回の遠隔復旧で復旧に失敗した復旧診断指令セットAを選択しない場合には、故障要因1の次に故障コード「0001」に対応する件数の多い故障要因2にリンクした復旧診断指令セットBを選択する。
On the other hand, when the remote recovery of the
また、情報処理装置360が故障コード「0001」に対応する複数の指令の内で復旧率が最も高い復旧診断指令セットBを選択してエレベーター20の復旧に成功した場合には、復旧診断指令セットBの復旧率が高くなる。従って、情報処理装置360は、次の遠隔復旧では、前回と同様、復旧診断指令セットBを選択する。一方、復旧診断指令セットBでエレベーター20の復旧に失敗した場合には復旧診断指令セットBの復旧率が低くなる。そして、復旧診断指令セットBの復旧率が復旧診断指令セットAの復旧率よりも低くなったら、情報処理装置360は、復旧診断指令セットAを選択する。なお、情報処理装置360が前回の遠隔復旧で復旧に失敗した復旧診断指令セットBを選択しない場合には、復旧診断指令セットBの次に故障コード「0001」に対応する復旧率の高い復旧診断指令セットAを選択する。
Further, when the
このように、遠隔復旧システム100は、遠隔復旧に成功すると故障要因の件数、選択した復旧診断指令セットの復旧率を増加させる。また、遠隔復旧システム100は、遠隔復旧に失敗すると故障要因の件数はそのままで、選択した復旧診断指令セットの復旧率を低下させる。このため、遠隔復旧に成功すると、その遠隔復旧で選択した復旧診断指令セットが次の遠隔復旧の際に選択される可能性が高くなる。また、遠隔復旧に失敗するとその遠隔復旧で選択した復旧診断指令セットが次の遠隔復旧の際に選択される可能性が低くなる。このため、遠隔復旧の回数が多くなるに従って、情報処理装置360は、復旧診断データベース380から故障コードに対応した復旧可能性の高い復旧診断指令セットを選択できるようになり、エレベーター20の復旧の確実性を向上させていくことができる。
Thus, when the remote recovery is successful, the
以上説明した実施形態では、制御盤210からドア13、26に関する故障であることを示す故障コード「0001」が出力された場合の遠隔復旧システム100の動作について説明した。次に、制御盤210から、制御回路に関する故障であることを示す故障コード「0002」が出力された場合について説明する。なお、故障コード「0001」が出力された場合と同様の動作については、説明は省略する。
In the above-described embodiment, the operation of the
故障コードが制御回路に関する故障を示す「0002」の場合、技術者350が現地で点検した結果、その故障コード「0002」の出力された要因が制御盤210に取り付けられているリレーに不具合のある場合(故障要因4)であったり、リレーを駆動するリレー駆動回路に不具合がある場合(故障要因5)であったり、その他の故障要因6であったりする。故障要因別データ378は、故障コード「0002」の場合、リレーに不具合が要因(故障要因4)の場合が100件、リレー駆動回路の不具合が要因(故障要因5)の場合が50件、その他の故障要因6の場合が10件というようなデータ構造で、その件数が多い順にデータが並べられるように構成されている。先に説明したと同様、遠隔復旧システム100による復旧の場合、復旧指令によってエレベーター20の復旧に成功した場合にその復旧指令の基礎となった故障コードに対応する故障要因の件数が全体の故障要因の件数に追加される。
If the failure code is “0002” indicating a failure related to the control circuit, the
図7に示すように、復旧診断データベース380は、故障要因別データ378に復旧診断指令セットと復旧率とをリンクさせたデータベースである。以下、故障コードが制御回路に関する故障を示す「0002」の場合の復旧診断データベース380のデータ構成について説明する。リレーに不具合のある場合(故障要因4)には、復旧診断データは、故障要因4の件数データに復旧指令として「制御回路リセット+低速アップ、ダウン運転」、復旧診断指令として「各階運転、高速運転診断」、の2つの指令のセットである復旧診断指令セットDと、この復旧診断指令による復旧動作による復旧率a%とをリンクさせたデータ構成となっている。リレー駆動回路に不具合がある場合(故障要因5)には、復旧診断データは、故障要因5の件数データに復旧指令として「制御回路リセット+最上階、最下階間運転」、復旧指令として「各階運転、高速運転診断」、の2つの指令のセットである復旧診断指令セットEと、この復旧診断指令による復旧動作による復旧率b%とをリンクさせたデータ構成となっている。同様に故障要因6の場合には、復旧診断データは、故障要因6の件数データに復旧診断指令セットFと復旧率c%とをリンクさせたデータ構成となっている。このように、復旧診断データベース380は、故障コードと、その故障コードに対応する故障要因と、その故障要因の件数と、復旧指令と復旧診断のセットである復旧診断指令セットと、復旧率とを対応づけてデータベースに格納したものである。なお、復旧率は、復旧診断指令セットEのb%が最も高くなっている。
As shown in FIG. 7, the
故障コードが「0002」の場合、情報処理装置360が、情報処理装置360が故障コード「0002」に対応する最も件数の多い故障要因に基づいて復旧診断指令セットDを選択した場合、情報処理装置360は、復旧診断指令セットDを制御盤210に送信する。制御盤210は、制御回路リセット動作を実行した後、エレベーター20のカゴ22を低速で上昇、下降させる低速アップ、ダウン運転を実行する。その後、制御盤210は、ドア13、26の開閉を行わずに各階に停止する各階運転、複数の階間を高速で運転する高速運転を実行し、各階に停止する運転、および、高速での走行運転に異常がないかを確認する。制御盤210は、各階運転、高速運転で異常のない場合には、エレベーター20の復旧に成功した判定結果を出力する。また、各階運転、高速運転で異常が検出された場合には、制御盤210は、エレベーター20の復旧に失敗した判定結果を出力する。この判定結果は、制御盤210から通信装置250、320を介して情報処理装置360に入力される。情報処理装置360は、先に説明したと同様、判定結果に基づいてより復旧可能性の高い復旧診断指令セットを選択することができるように、故障履歴データ377、故障要因別データ378、復旧診断データベース380を更新する。
When the failure code is “0002”, the
また、情報処理装置360が故障コード「0002」に対応する復旧率が最も高い復旧診断指令セットEを選択した場合、情報処理装置360は、復旧診断指令セットEを制御盤210に送信する。制御盤210は、制御回路リセット動作を実行した後、エレベーター20のカゴ22を最下階と最上階との間で移動させる最下階、最上階間運転を実行する。次に、制御盤210は、先に説明した各階運転、高速運転を実行し、エレベーター20の復旧診断を行い、エレベーター20の復旧に成功したか失敗したかの判定結果を出力する。先に説明したと同様、この判定結果は、制御盤210から通信装置250、320を介して情報処理装置360に入力される。情報処理装置360は、判定結果に基づいてより復旧可能性の高い復旧診断指令セットを選択することができるように、故障履歴データ377、故障要因別データ378、復旧診断データベース380を更新する。
Further, when the
次に、故障コードがブレーキに関する故障であることを示す「0003」の場合について説明する。 Next, a case where the failure code is “0003” indicating that the failure is related to the brake will be described.
故障コードがブレーキに関する故障を示す0003の場合、技術者350が現地で点検した結果、その故障コード「0003」の出力された要因が制御盤210のブレーキ回路の異常が要因(故障要因7)であったり、その他の故障要因8、故障要因9であったりする。そこで、故障要因別データ378は、故障コード「0003」の場合、ブレーキ回路の異常が要因(故障要因7)の場合が100件、故障要因8の場合が50件、その他の故障要因9の場合が10件というようなデータ構造で、その件数が多い順にデータが並べられるように構成されている。先に説明したと同様、遠隔復旧システム100による復旧の場合、復旧指令によってエレベーター20の復旧に成功した場合にその復旧指令の基礎となった故障コードに対応する故障要因の件数が全体の故障要因の件数に追加される。
In the case where the failure code is 0003 indicating a failure related to the brake, the
図8に示すように、復旧診断データベース380は、故障要因別データ378に復旧診断指令セットと復旧率とをリンクさせたデータベースである。以下、故障コードがブレーキに関する故障を示す「0003」の場合の復旧診断データベース380のデータ構成について説明する。ブレーキ回路の異常が要因(故障要因7)の場合には、復旧診断データは、故障要因7の件数データに復旧指令として「制御回路リセット」、復旧診断指令として「ブレーキトルク診断」、の2つの指令のセットである復旧診断指令セットGと、この復旧診断指令による復旧動作による復旧率d%とをリンクさせたデータ構成となっている。故障要因8、故障要因9の場合には、復旧診断データは、故障要因8および故障要因9の各件数データに復旧診断指令セットHと復旧率e%、復旧診断指令セットIと復旧率f%をそれぞれリンクさせたデータ構成となっている。このように、復旧診断データベース380は、故障コードと、その故障コードに対応する故障要因と、その故障要因の件数と、復旧指令と復旧診断のセットである復旧診断指令セットと、復旧率とを対応づけてデータベースに格納したものである。なお、復旧率は、復旧診断指令セットHのe%が最も高くなっている。
As shown in FIG. 8, the
次に制御盤210がブレーキに関する故障発生を検出した場合の遠隔復旧システム100の動作について説明する。
Next, the operation of the
故障コードが「0003」の場合、情報処理装置360が、図5のステップS106で情報処理装置360が故障コード「0003」に対応する最も件数の多い故障要因に基づいて復旧診断指令セットGを選択した場合、情報処理装置360は、復旧診断指令セットGを制御盤210に送信する。
When the failure code is “0003”, the
故障コードが「0003」の場合、この復旧診断指令セットGを受信したら、制御盤210は、図5のステップS109に示す現場確認において、ブレーキトルク診断動作を実行する。ブレーキトルク診断動作は、機械的なブレーキで駆動装置24の中の巻上機が回転しない状態とし、巻上機に駆動力を与えてブレーキの保持力で巻上機が回転しないことを確認する動作である。この動作で異常がなければ、制御盤210は、図5のステップS109でエレベーター20の現場確認ができたとして遠隔復旧のアナウンスを行う。その後、図5のステップS110に進んで、制御盤210は、制御回路リセット動作を実行する。
When the failure code is “0003”, when receiving the restoration diagnosis command set G, the
その後、制御盤210はブレーキトルク診断動作を実行する。制御盤210は、この動作により巻上機の回転がない場合には、エレベーター20の復旧に成功した判定結果を出力する。また、巻上機が回転した場合には、制御盤210は、エレベーター20の復旧に失敗した判定結果を出力する。この判定結果は、制御盤210から通信装置250、320を介して情報処理装置360に入力される。情報処理装置360は、判定結果に基づいて復旧可能性の高い復旧診断指令セットを選択することができるように、故障履歴データ377、故障要因別データ378、復旧診断データベース380を更新する。
Thereafter, the
また、先に説明したと同様、情報処理装置360が故障コード「0003」に対応する復旧率が最も高い復旧診断指令セットHを選択して制御盤210に復旧動作および復旧診断動作を実行させることもできる。
Further, as described above, the
なお、制御盤210は、ブレーキトルク診断動作で異常があった場合には、遠隔復旧を開始できないと判断し、遠隔復旧動作を実行せず、遠隔監視センター310に遠隔復旧不可を通知する。
Note that if there is an abnormality in the brake torque diagnosis operation, the
以上説明したように、遠隔復旧システム100は、エレベーター20でいろいろな故障が発生した場合に、エレベーター20から離れた場所に配置された遠隔復旧装置300からの指令でエレベーター20に復旧動作、復旧診断動作を実行させてエレベーター20の復旧を行うことができる。このため、エレベーター20に故障が発生した際に技術者350を現地に出動させることなくエレベーター20を短時間で復旧することができ、エレベーター20の運行サービス向上を図ることができる。
As described above, when various failures occur in the
また、遠隔復旧システム100は、復旧判定結果に基づいて次回の遠隔復旧の際により復旧可能性が高い復旧診断指令セットを選択することができるように、故障履歴データ377、故障要因別データ378、復旧診断データベース380を更新する。このため、遠隔復旧の回数が多くなるに従って、情報処理装置360は、復旧診断データベース380から故障コードに対応したより適切な復旧診断指令セットを選択できるようになる。これにより、更に、エレベーター20の復旧を確実に行うことができ、復旧にかかる時間を短縮してエレベーター20の運行サービス向上を図ることができる。
In addition, the
なお、本発明は以上説明した実施形態に限定されるものではなく、請求の範囲により規定されている本発明の技術的範囲ないし本質から逸脱することない全ての変更および修正を包含するものである。 The present invention is not limited to the embodiments described above, but includes all changes and modifications that do not depart from the technical scope or essence of the present invention defined by the claims. .
10 ビル、11 昇降路、12 階床、13,26 ドア、20 エレベーター、22 カゴ、23 ワイヤ、24 駆動装置、27 床、30,35 通信ネットワーク、100 遠隔復旧システム、200 エレベーター制御装置、210 制御盤、250,320 通信装置、300 遠隔復旧装置、310 遠隔監視センター、330 監視盤、331 ディスプレイ、332 スイッチ、333 電話、334 監視者、340 サービスセンター、350 技術者、360 情報処理装置、370 保守データベース、371 エレベーター仕様データ、372 検査履歴データ、373 保守作業履歴データ、374 遠隔点検履歴データ、375 変調履歴データ、376 修理工事履歴データ、377 故障履歴データ、378 故障要因別データ、380 復旧診断データベース。 10 building, 11 hoistway, 12 floor, 13, 26 door, 20 elevator, 22 basket, 23 wire, 24 drive device, 27 floor, 30, 35 communication network, 100 remote recovery system, 200 elevator control device, 210 control Panel, 250, 320 Communication device, 300 Remote recovery device, 310 Remote monitoring center, 330 Monitoring panel, 331 Display, 332 Switch, 333 Telephone, 334 Monitor, 340 Service center, 350 Engineer, 360 Information processing device, 370 Maintenance Database, 371 Elevator specification data, 372 Inspection history data, 373 Maintenance history data, 374 Remote inspection history data, 375 Modulation history data, 376 Repair history data, 377 Failure history data, 378 Data, 380 recovery diagnostic database.
本発明のエレベーター故障の遠隔復旧システムは、エレベーターの駆動制御を行うエレベーター制御装置と、前記エレベーター制御装置と通信し、前記エレベーターに故障の復旧動作を行わせる遠隔復旧装置と、を備え、前記エレベーター制御装置は、前記エレベーターの故障を検出した際に前記エレベーターの故障コードを含む故障信号を発信し、前記遠隔復旧装置は、前記故障信号を受信した際に、前記故障信号に含まれる故障コードに対応する復旧指令と復旧診断指令とを前記エレベーター制御装置に発信し、前記エレベーター制御装置に前記エレベーターの復旧動作と復旧診断動作とを実行させ、前記復旧診断指令は、前記復旧指令に対応する指令であることを特徴とする。 An elevator failure remote recovery system according to the present invention includes an elevator control device that performs drive control of an elevator, and a remote recovery device that communicates with the elevator control device and causes the elevator to perform a failure recovery operation. The control device transmits a failure signal including the failure code of the elevator when the failure of the elevator is detected, and the remote recovery device outputs a failure code included in the failure signal when the failure signal is received. A corresponding restoration command and a restoration diagnosis command are transmitted to the elevator control device, and the elevator control device executes a restoration operation and a restoration diagnosis operation of the elevator. The restoration diagnosis command is a command corresponding to the restoration command. and wherein the der Rukoto.
本発明のエレベーター故障の遠隔復旧システムにおいて、前記遠隔復旧装置の発信する前記復旧指令は、前記故障コードに対応する複数の故障要因の内で件数の多い故障要因に応じた指令、または、前記故障コードに対応する複数の復旧指令の内で、その復旧指令によって前記エレベーターが復旧した割合である復旧率が高い指令としてもよい。 In the remote recovery system for an elevator failure according to the present invention, the recovery command transmitted by the remote recovery device is a command corresponding to a large number of failure factors among a plurality of failure factors corresponding to the failure code, or the failure among a plurality of recovery command corresponding to the code, it may be its recovery command by the recovery rate is the rate at which the elevator is restored high directive.
Claims (6)
エレベーターの駆動制御を行うエレベーター制御装置と、
前記エレベーター制御装置と通信し、前記エレベーターに故障の復旧動作を行わせる遠隔復旧装置と、を備え、
前記エレベーター制御装置は、前記エレベーターの故障を検出した際に前記エレベーターの故障コードを含む故障信号を発信し、
前記遠隔復旧装置は、前記故障信号を受信した際に、前記故障信号に含まれる故障コードに対応する復旧指令と復旧診断指令とを前記エレベーター制御装置に発信し、前記エレベーター制御装置に前記エレベーターの復旧動作と復旧診断動作とを実行させるエレベーター故障の遠隔復旧システム。A remote recovery system for elevator failure,
An elevator control device for controlling the drive of the elevator;
A remote recovery device that communicates with the elevator control device and causes the elevator to perform a failure recovery operation, and
The elevator control device transmits a failure signal including a failure code of the elevator when a failure of the elevator is detected,
When the remote recovery device receives the failure signal, the remote recovery device transmits a recovery command and a recovery diagnosis command corresponding to the failure code included in the failure signal to the elevator control device, and sends the elevator control device to the elevator control device. Elevator failure remote recovery system that performs recovery operation and recovery diagnosis operation.
前記遠隔復旧装置の発信する前記復旧指令は、
前記故障コードに対応する複数の故障要因の内で件数の多い故障要因に応じた指令、または、前記故障コードに対応する複数の復旧指令の内で、その復旧指令によって前記エレベーターが復旧した割合である復旧率が高い指令であり、
前記復旧診断指令は、前記復旧指令に対応する指令であるエレベーター故障の遠隔復旧システム。A remote recovery system for an elevator failure according to claim 1,
The recovery command transmitted by the remote recovery device is:
A command corresponding to a large number of failure factors among a plurality of failure factors corresponding to the failure code, or a rate at which the elevator is restored by the recovery command among a plurality of recovery commands corresponding to the failure code A certain restoration rate is high,
The restoration diagnosis command is an elevator failure remote restoration system which is a command corresponding to the restoration command.
前記復旧指令は、前記故障コードに対応する複数の故障要因の内で件数が最も多い故障要因に応じた指令、または、前記故障コードに対応する複数の復旧指令の内で、その復旧指令によって前記エレベーターが復旧した割合である復旧率が最も高い指令であるエレベーター故障の遠隔復旧システム。A remote recovery system for an elevator failure according to claim 2,
The recovery command is a command corresponding to a failure factor having the largest number of cases among a plurality of failure factors corresponding to the failure code, or a plurality of recovery commands corresponding to the failure code, and the recovery command Elevator failure remote recovery system, which is the command with the highest recovery rate, which is the rate at which the elevator is restored.
前記エレベーター制御装置は、前記復旧指令に応じて実行した復旧動作の後、前記復旧診断動作によって前記エレベーターが復旧したかどうかを判定し、判定結果を前記遠隔復旧装置に送信するエレベーター故障の遠隔復旧システム。The elevator recovery remote recovery system according to claim 2 or 3,
The elevator control device determines whether the elevator has been recovered by the recovery diagnosis operation after the recovery operation executed according to the recovery command, and transmits the determination result to the remote recovery device. system.
前記遠隔復旧装置は、前記故障コードと、前記故障コードに対応する前記故障要因の件数と、前記復旧指令と、前記復旧診断指令と、を対応づけた復旧診断データベースを備え、
前記エレベーター制御装置が送信した前記エレベーターが復旧したかどうかの前記判定結果に基づいて、前記故障コードに対応する前記故障要因の件数を更新するエレベーター故障の遠隔復旧システム。A remote recovery system for an elevator failure according to claim 4,
The remote recovery device includes a recovery diagnosis database in which the failure code, the number of the failure factors corresponding to the failure code, the recovery instruction, and the recovery diagnosis instruction are associated with each other.
An elevator failure remote recovery system that updates the number of failure factors corresponding to the failure code based on the determination result of whether or not the elevator has been transmitted transmitted from the elevator control device.
前記復旧診断データベースは、前記故障コードと、前記故障コードに対応する前記故障要因の件数と、前記復旧指令と、前記復旧診断指令と、前記復旧率とを対応づけたものであり、
前記エレベーター制御装置が送信した前記エレベーターが復旧したかどうかの前記判定結果に基づいて、前記故障コードに対応する前記故障要因の件数および前記復旧率を更新するエレベーター故障の遠隔復旧システム。It is the remote recovery system of the elevator failure of Claim 5,
The recovery diagnosis database is a correspondence between the failure code, the number of the failure factors corresponding to the failure code, the recovery command, the recovery diagnostic command, and the recovery rate,
An elevator failure remote recovery system that updates the number of failure factors corresponding to the failure code and the recovery rate based on the determination result of whether or not the elevator has been transmitted transmitted from the elevator control device.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/085308 WO2018100604A1 (en) | 2016-11-29 | 2016-11-29 | Remote recovery system for elevator failures |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2018100604A1 true JPWO2018100604A1 (en) | 2018-11-29 |
| JP6522256B2 JP6522256B2 (en) | 2019-05-29 |
Family
ID=62242390
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018545389A Active JP6522256B2 (en) | 2016-11-29 | 2016-11-29 | Elevator failure remote recovery system |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6522256B2 (en) |
| KR (1) | KR102162669B1 (en) |
| CN (1) | CN110035968B (en) |
| WO (1) | WO2018100604A1 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113205485B (en) * | 2021-04-08 | 2024-08-06 | 惠州市惠发电梯工程有限公司 | Elevator fault self-diagnosis image display method, device, computer and storage medium |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07196268A (en) * | 1994-01-10 | 1995-08-01 | Hitachi Building Syst Eng & Service Co Ltd | Abnormal state judging device for elevator |
| JP2003104644A (en) * | 2001-10-01 | 2003-04-09 | Toshiba Elevator Co Ltd | Restoration support system for broken down elevator and monitor center |
| JP2003256367A (en) * | 2002-03-06 | 2003-09-12 | Seiko Epson Corp | Information providing system concerning electronic equipment error and server for managing past error results of electric equipment |
| JP2005275631A (en) * | 2004-03-23 | 2005-10-06 | Mitsubishi Electric Information Systems Corp | Monitoring center server and monitoring device |
| JP2011195283A (en) * | 2010-03-19 | 2011-10-06 | Toshiba Elevator Co Ltd | Automatic diagnostic device of elevator |
| US20120051449A1 (en) * | 2009-04-24 | 2012-03-01 | Inventio Ag | Communication with an elevator system |
-
2016
- 2016-11-29 WO PCT/JP2016/085308 patent/WO2018100604A1/en active Application Filing
- 2016-11-29 CN CN201680091145.4A patent/CN110035968B/en active Active
- 2016-11-29 KR KR1020197018142A patent/KR102162669B1/en active IP Right Grant
- 2016-11-29 JP JP2018545389A patent/JP6522256B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07196268A (en) * | 1994-01-10 | 1995-08-01 | Hitachi Building Syst Eng & Service Co Ltd | Abnormal state judging device for elevator |
| JP2003104644A (en) * | 2001-10-01 | 2003-04-09 | Toshiba Elevator Co Ltd | Restoration support system for broken down elevator and monitor center |
| JP2003256367A (en) * | 2002-03-06 | 2003-09-12 | Seiko Epson Corp | Information providing system concerning electronic equipment error and server for managing past error results of electric equipment |
| JP2005275631A (en) * | 2004-03-23 | 2005-10-06 | Mitsubishi Electric Information Systems Corp | Monitoring center server and monitoring device |
| US20120051449A1 (en) * | 2009-04-24 | 2012-03-01 | Inventio Ag | Communication with an elevator system |
| JP2011195283A (en) * | 2010-03-19 | 2011-10-06 | Toshiba Elevator Co Ltd | Automatic diagnostic device of elevator |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018100604A1 (en) | 2018-06-07 |
| KR20190083668A (en) | 2019-07-12 |
| CN110035968A (en) | 2019-07-19 |
| CN110035968B (en) | 2020-10-27 |
| KR102162669B1 (en) | 2020-10-07 |
| JP6522256B2 (en) | 2019-05-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6615386B2 (en) | Elevator remote monitoring device | |
| JP6437176B2 (en) | Elevator malfunction remote recovery system | |
| WO2018100606A1 (en) | Remote recovery system for elevator failures | |
| JP6479284B2 (en) | Elevator malfunction remote recovery system | |
| JP6479285B2 (en) | Elevator malfunction remote recovery system | |
| WO2018100604A1 (en) | Remote recovery system for elevator failures | |
| JP6419360B1 (en) | Elevator system | |
| JP6605758B2 (en) | Elevator malfunction remote recovery system | |
| JP6580276B2 (en) | Elevator malfunction remote recovery system | |
| WO2018123026A1 (en) | Remote monitoring system for elevator | |
| JPWO2018122999A1 (en) | Elevator remote operation resumption system | |
| JP6564147B2 (en) | Elevator malfunction remote recovery system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180828 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180828 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180828 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20180921 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181002 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181105 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190307 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190326 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190423 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6522256 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |