JP7179891B2 - 走行領域特定システム、走行領域特定方法 - Google Patents
走行領域特定システム、走行領域特定方法 Download PDFInfo
- Publication number
- JP7179891B2 JP7179891B2 JP2021037831A JP2021037831A JP7179891B2 JP 7179891 B2 JP7179891 B2 JP 7179891B2 JP 2021037831 A JP2021037831 A JP 2021037831A JP 2021037831 A JP2021037831 A JP 2021037831A JP 7179891 B2 JP7179891 B2 JP 7179891B2
- Authority
- JP
- Japan
- Prior art keywords
- travel
- area
- vehicle body
- locus
- field
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title description 14
- 238000012937 correction Methods 0.000 claims description 8
- 230000005540 biological transmission Effects 0.000 description 12
- 238000001514 detection method Methods 0.000 description 10
- 238000004891 communication Methods 0.000 description 9
- 238000012546 transfer Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 6
- 239000000446 fuel Substances 0.000 description 6
- 238000012790 confirmation Methods 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 230000003028 elevating effect Effects 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 238000003971 tillage Methods 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000010899 nucleation Methods 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000003337 fertilizer Substances 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 239000002828 fuel tank Substances 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images










Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
域を特定する装置である走行領域特定システムの技術に関する。
もの(自律走行作業車両)が知られており、例えば、特許文献1に示されたものがある。
特許文献1に示された作業車両は、当該作業車両により作業を行う作業領域(作業現場の
中央部)と作業領域を除く領域(周辺部)のそれぞれにおいて経路を定める制御プログラ
ムを備えており、当該制御プログラムによって、経路に沿って作業車両を自律走行させる
ことによって、所定の作業を自動化することを可能にしている。
を備えており、オペレータが自律走行作業車両で圃場の外周を走行し、取得した走行軌跡
から頂点(角部)を指定することで、圃場形状の登録を行っている。
った場合には、走行領域たる圃場の形状を誤って設定してしまう場合があり、ユーザーの
意図に反して、誤った走行領域で経路が設定される場合があった。
の設定において、走行領域たる圃場の形状が誤って設定された場合には、走行領域の設定
に誤りがあることを報知し、または、走行領域の設定に補正して、誤った走行領域で経路
が設定されることを防止できる走行領域特定システムを提供することを目的としている。
段を説明する。
部と、前記位置情報を用いて特定される前記車体部の走行軌跡に基づいて前記車体部の走
行軌跡領域を特定可能な走行軌跡領域特定部と、前記走行軌跡から選択される複数の選択
点に基づいて前記車体部を走行させる走行領域を特定可能な走行領域特定部と、所定の報
知を実行可能な報知部と、を備え、前記所定の報知は、前記走行領域が予め取得される領
域データと一部重複するときに、前記走行領域に誤りがあることを示唆する報知である。
部と、前記位置情報を用いて特定される前記車体部の走行軌跡に基づいて前記車体部の走
行軌跡領域を特定可能な走行軌跡領域特定部と、前記走行軌跡から選択される複数の選択
点に基づいて前記車体部を走行させる走行領域を特定可能な走行領域特定部と、前記走行
領域を補正可能な補正部と、を備え、前記補正部は、前記走行領域が予め取得される領域
データと一部重複するときに、前記走行領域と前記領域データとが整合するように前記走
行領域を補正する。
、走行領域が予め取得される領域データと一部重複するときに、走行領域に誤りがあるこ
とを報知することにより、または、走行領域と領域データとが整合するように走行領域を
補正することにより、誤った走行領域で経路が設定されることを防止できる。
5を参照しつつ説明する。図1に示すように、無人で自動走行可能な自律走行作業車両1
、及び、この自律走行作業車両1に随伴して作業者が操向操作する有人の作業車両100
をトラクタとし、自律走行作業車両1及び作業車両100には作業機としてロータリ耕耘
装置がそれぞれ装着されている実施例について説明する。但し、作業車両はトラクタに限
定するものではなく、コンバイン等でもよく、また、作業機はロータリ耕耘装置に限定す
るものではなく、畝立て機や草刈機やレーキや播種機や施肥機等であってもよい。
タが備える走行に関する構成が制御されて予め定められた経路に沿ってトラクタが走行す
ることを意味する。単一の圃場における農作業を、無人車両及び有人車両で実行すること
を、農作業の協調作業、追従作業、随伴作業などと称することがある。なお、農作業の協
調作業としては、「単一圃場における農作業を、無人車両及び有人車両で実行すること」
に加え、「隣接する圃場等の異なる圃場における農作業を同時期に無人車両及び有人車両
で実行すること」が含まれてもよい。
する。トラクタの車体部2は、ボンネット3内にエンジン4が内設され、該ボンネット3
の後部のキャビン12内にダッシュボード14が設けられ、ダッシュボード14上に操向
操作手段となるステアリングハンドル5が設けられている。該ステアリングハンドル5の
回動により操舵装置を介して前輪10・10の向きが回動される。操舵装置を作動させる
操舵アクチュエータ40は制御部30を構成するステアリングコントローラ301と接続
される。自律走行作業車両1の操舵方向は操向センサ20により検知される。操向センサ
20はロータリエンコーダ等の角度センサからなり、前輪10の回動基部に配置される。
但し、操向センサ20の検知構成は限定するものではなく操舵方向が認識されるものであ
ればよく、ステアリングハンドル5の回動を検知したり、パワーステアリングの作動量を
検知してもよい。操向センサ20により得られた検出値は制御部30のステアリングコン
トローラ301に入力される。
制御コントローラ303、水平制御コントローラ304、作業制御コントローラ305、
測位制御ユニット306、自律走行制御コントローラ307等を備え、それぞれCPU(
中央演算処理装置)やRAMやROM等の記憶装置やインターフェース等を備え、記憶装
置には動作させるためのプログラムやデータ等が記憶され、CAN通信によりそれぞれ情
報やデータ等を送受信できるように通信可能としている。また、自律走行制御コントロー
ラ307は、プログラムやデータ等が記憶される記憶部たるメモリ309を備えている。
ケース7が配置される。ミッションケース7の左右両側にリアアクスルケース9・9が連
設され、該リアアクスルケース9・9には車軸を介して後輪11・11が支承される。エ
ンジン4からの動力はミッションケース7内の変速装置(主変速装置や副変速装置)によ
り変速されて、後輪11・11を駆動可能としている。変速装置は例えば油圧式無段変速
装置で構成して、可変容量型の油圧ポンプの可動斜板をモータ等の変速手段44により作
動させて変速可能としている。変速手段44は制御部30の変速制御コントローラ303
と接続されている。後輪11の回転数は車速センサ27により検知され、走行速度として
変速制御コントローラ303に入力される。但し、車速の検知方法や車速センサ27の配
置位置は限定するものではない。
チはPTO入切手段45により入り切りされ、PTO入切手段45は表示手段49を介し
て制御部30の自律走行制御コントローラ307と接続され、PTO軸への動力の断接を
制御可能としている。また、作業機として播種機や畦塗機等を装着した場合、作業機独自
の制御ができるように作業機コントローラ308が備えられ、該作業機コントローラ30
8は情報通信配線(所謂、ISOBUS)を介して作業制御コントローラ305と接続さ
れる。
され、該フロントアクスルケース8の両側に前輪10・10が支承され、前記ミッション
ケース7からの動力を前輪10・10に伝達可能に構成している。前記前輪10・10は
操舵輪となっており、ステアリングハンドル5の回動操作により回動可能とするとともに
、操舵装置の駆動手段となるパワステシリンダからなる操舵アクチュエータ40により前
輪10・10が左右操舵回動可能となっている。操舵アクチュエータ40は制御部30の
ステアリングコントローラ301と接続されて制御される。
1や水温センサや油圧センサ等が接続され、エンジン4の状態を検知できるようにしてい
る。エンジンコントローラ302では設定回転数と実回転数から負荷を検出し、過負荷と
ならないように制御するとともに、後述する遠隔操作装置112にエンジン4の状態を送
信して表示装置113で表示できるようにしている。
29が配置されて表示手段49と接続され、表示手段49は自律走行作業車両1のダッシ
ュボード14に設けられ、燃料の残量を表示する。そして、燃料の残量は自律走行制御コ
ントローラ307で作業可能時間が演算され、通信装置110を介して遠隔操作装置11
2に情報が送信されて、遠隔操作装置112の表示装置113に燃料残量と作業可能時間
が表示可能とされる。なお、回転計、燃料計、油圧、異常を表示する表示手段と、現在位
置等を表示可能な表示手段とは別構成でもよい。
タや設定値等を表示する表示手段49が配置されている。表示手段49は遠隔操作装置1
12と同様にタッチパネル式として、データの入力や選択やスイッチ操作やボタン操作等
も可能としている。
に装設させている。本実施形態では、作業機24としてロータリ耕耘装置を採用しており
、前記ミッションケース7上に昇降シリンダ26が設けられ、該昇降シリンダ26を伸縮
させることにより、作業機装着装置23を構成する昇降アームを回動させて作業機24を
昇降できるようにしている。昇降シリンダ26は昇降アクチュエータ25の作動により伸
縮され、昇降アクチュエータ25は制御部30の水平制御コントローラ304と接続され
ている。また、前記作業機装着装置23の左右一側のリフトリンクには傾斜シリンダが設
けられ、該傾斜シリンダを作動させる傾斜アクチュエータ47は水平制御コントローラ3
04と接続されている。
PSアンテナ34とデータ受信アンテナ38が接続され、移動GPSアンテナ34とデー
タ受信アンテナ38は前記キャビン12上に設けられる。測位制御ユニット306には、
位置算出手段を備えて緯度と経度を算出し、現在位置を表示手段49や遠隔操作装置11
2の表示装置113で表示できるようにしている。なお、GPS(米国)に加えて準天頂
衛星(日本)やグロナス衛星(ロシア)等の衛星測位システム(GNSS)を利用するこ
とで精度の高い測位ができるが、本実施形態ではGPSを用いて説明する。
よび進行方向を検知するために方位角検出部32を具備し制御部30と接続されている。
但し、GPSの位置計測から進行方向を算出できるので、方位角検出部32を省くことが
できる。ジャイロセンサ31は、車体部2の前後方向の傾斜(ピッチ)の角速度、車体部
2の左右方向の傾斜(ロール)の角速度、および旋回(ヨー)の角速度、を検出するもの
である。該三つの角速度を積分計算することにより、車体部2の前後方向および左右方向
への傾斜角度、および旋回角度を求めることが可能である。ジャイロセンサ31の具体例
としては、機械式ジャイロセンサ、光学式ジャイロセンサ、流体式ジャイロセンサ、振動
式ジャイロセンサ等が挙げられる。ジャイロセンサ31は制御部30に接続され、当該三
つの角速度に係る情報を制御部30に入力する。
位角検出部32の具体例としては磁気方位センサ等が挙げられる。方位角検出部32はC
AN通信手段を介して自律走行制御コントローラ307に情報が入力される。
32から取得した信号を姿勢・方位演算手段により演算し、自律走行作業車両1の姿勢(
向き、車体部2の前後方向及び左右方向の傾斜、旋回方向)を求める。
を用いて取得する。GPSを用いた測位方法としては、単独測位、相対測位、DGPS(
ディファレンシャルGPS)測位、RTK-GPS(リアルタイムキネマティック-GP
S)測位など種々の方法が挙げられ、これらいずれの方法を用いることも可能であるが、
本実施形態では測定精度の高いRTK-GPS測位方式を採用する。
準局と、位置を求めようとする移動局とで同時にGPS観測を行い、基準局で観測したデ
ータを無線等の方法で移動局にリアルタイムで送信し、基準局の位置成果に基づいて移動
局の位置をリアルタイムに求める方法である。
移動GPSアンテナ34とデータ受信アンテナ38が配置され、基準局となる固定通信機
35と固定GPSアンテナ36とデータ送信アンテナ39が所定位置に配設される。本実
施形態のRTK-GPS(リアルタイムキネマティック-GPS)測位は、基準局および
移動局の両方で位相の測定(相対測位)を行い、基準局の固定通信機35で測位したデー
タをデータ送信アンテナ39からデータ受信アンテナ38に送信する。
・からの信号を受信する。この信号は移動通信機33に送信され測位される。そして、同
時に基準局となる固定GPSアンテナ36でGPS衛星37・37・・・からの信号を受
信し、固定通信機35で測位し測位制御ユニット306に送信し、観測されたデータを解
析して移動局の位置を決定する。
律走行手段として備えられる。つまり、自律走行制御コントローラ307と接続された各
種情報取得ユニットによって、自律走行作業車両1の走行状態を各種情報として取得し、
自律走行制御コントローラ307と接続された各種制御ユニットによって、自律走行作業
車両1の自律走行を制御する。具体的には、GPS衛星37・37・・・から送信される
電波を受信して測位制御ユニット306において設定時間間隔で車体部2の位置情報を求
め、ジャイロセンサ31及び方位角検出部32から車体部2の変位情報および方位情報を
求め、これら位置情報と変位情報と方位情報に基づいて車体部2が予め設定した経路(作
業経路Raと走行経路Rb)に沿って走行するように、操舵アクチュエータ40、変速手
段44、昇降アクチュエータ25、PTO入切手段45、エンジンコントローラ302等
を制御して自律走行し、自動で作業できるようにしている。
障害物に当接しないようにしている。例えば、障害物センサ41はレーザセンサや超音波
センサやカメラで構成して車体部2の前部や側部や後部に配置して制御部30と接続し、
制御部30によって車体部2の前方や側方や後方に障害物があるかどうかを検出し、障害
物が設定距離以内に近づくと走行を停止させるように制御する。
圃場状態を撮影するカメラ42Rが搭載され制御部30と接続されている。カメラ42F
・42Rは本実施形態ではキャビン12のルーフの前部上と後部上に配置しているが、配
置位置は限定するものではなく、キャビン12内の前部上と後部上や一つのカメラ42を
車体部2の中心に配置して鉛直軸を中心に回転させて周囲を撮影しても、複数のカメラ4
2を車体部2の四隅に配置して車体部2の周囲を撮影する構成であってもよい。カメラ4
2F・42Rで撮影された映像は作業車両100に備えられた遠隔操作装置112の表示
装置113に表示される。
Rbからなる経路Rを設定したり、自律走行作業車両1を遠隔操作したり、自律走行作業
車両1の走行状態や作業機の作動状態を監視したり、作業データを記憶したりするもので
あり、制御装置(CPUやメモリ)や通信装置111や表示装置113等を備える。
両100に遠隔操作装置112を搭載して自律走行作業車両1を操作可能としている。作
業車両100の基本構成は自律走行作業車両1と略同じ構成であるので詳細な説明は省略
する。なお、作業車両100(または遠隔操作装置112)にGPS用の制御ユニットを
備える構成とすることも可能である。
操作部に着脱可能としている。遠隔操作装置112は作業車両100のダッシュボードに
取り付けたまま操作することも、作業車両100の外に持ち出して携帯して操作すること
も、自律走行作業車両1のダッシュボード14に取り付けても操作可能としている。遠隔
操作装置112は、例えばノート型やタブレット型のパーソナルコンピュータで構成する
ことができる。本実施形態ではタブレット型のパーソナルコンピュータで構成している。
おり、自律走行作業車両1と遠隔操作装置112には通信するための通信装置110・1
11がそれぞれ設けられている。通信装置111は遠隔操作装置112に一体的に構成さ
れている。通信手段は、例えば無線LAN等で相互に通信可能に構成されている。遠隔操
作装置112は画面に触れることで操作可能なタッチパネル式の操作画面とした表示装置
113を筐体表面に設け、筐体内に通信装置111やCPUや記憶装置114やバッテリ
等を収納している。
る手順について説明する。遠隔操作装置112の表示装置113はタッチパネル式として
おり、電源をオンして遠隔操作装置112を起動させると初期画面が現れるようにしてい
る。初期画面では、図3に示すように、トラクタ設定ボタン201、圃場設定ボタン20
2、経路生成設定ボタン203、データ転送ボタン204、作業開始ボタン205、終了
ボタン206が表示される。
去にこの遠隔操作装置112によりトラクタを用いて作業行った場合、つまり、過去に設
定したトラクタが存在する場合、そのトラクタ名(機種)が表示される。複数のトラクタ
名が表示されると今回使用するトラクタ名をタッチして選択し、その後初期画面に戻る。
新規にトラクタ設定を行う場合には、トラクタの機種を特定する。この場合、機種名を直
接入力する。或いは、複数のトラクタの機種を表示装置113に一覧表示させて所望の機
種を選択できるようにしている。
る。移動GPSアンテナ34の取付位置は、トラクタによって異なり、取り付ける技術者
によっても異なる場合もあるので、トラクタの平面図を表示させて取付位置を設定する。
イズ、形状、作業機の位置の設定画面が現れる。作業機の位置は前部か、前輪と後輪の間
か、後部か、オフセットか、を選択する。作業機の設定が終了すると、作業中の車速、作
業中のエンジン回転数、旋回時の車速、旋回時のエンジン回転数の設定画面が現れる。作
業中の車速は往路と復路で異なる車速とすることも可能である。車速、及び、エンジン回
転数の設定が終了すると、初期画面に戻る。
の遠隔操作装置112によりトラクタを用いて作業行った場合、つまり、過去に設定した
圃場が存在する場合、設定されている圃場の名前が表示される。表示された複数の圃場名
から今回作業を行う圃場名をタッチして選択すると、その後、後述する経路生成設定に進
み、或いは、初期画面に戻ることが可能である。なお、設定された圃場を編集又は新規に
設定することも可能である。
、図4に示すように、トラクタ(自律走行作業車両1)を圃場H内の四隅のうちの一つの
隅Aに位置させ、「測定開始」のボタンをタッチする。その後、トラクタを圃場Hの外周
に沿って走行させて圃場形状を登録する。次に、作業者は、登録された圃場形状から、角
位置A・B・C・Dや変曲点を登録して圃場形状を特定する。
終了位置Gwを設定する。この圃場H内に障害物が存在する場合には、障害物の位置まで
トラクタを移動させ、障害物設定ボタン(図示せず)をタッチして、障害物の周囲を走行
して、障害物設定を行う。なお、障害物が圃場Hの周囲近辺に存在したり、障害物が最小
旋回半径よりも小さく、その外周を走行すると大きくなり過ぎる場合には、表示される圃
場の地図から登録してもよい。上記作業が終了すると、または、過去に登録した圃場を選
択すると、確認画面となり、OK(確認)ボタンと「編集/追加」ボタンが表示される。
過去に登録した圃場に変更がある場合には、「編集/追加」ボタンをタッチする。
は初期画面で経路生成設定ボタン203をタッチすることによっても設定が可能となる。
経路生成設定モードに移ると、自律走行作業車両1に対して作業車両100がどの位置で
走行するかの選択画面が表示される。つまり、自律走行作業車両1と作業車両100の位
置関係を設定する。具体的には、(1)作業車両100が自律走行作業車両1の左後方に
位置する。(2)作業車両100が自律走行作業車両1の右後方に位置する。(3)作業
車両100が自律走行作業車両1の真後ろに位置する。(4)作業車両100は併走しな
い(自律走行作業車両1のみで作業を行う)。の4種類が表示され、タッチすることによ
り選択できる。
。次に、スキップ数を設定する。つまり、自律走行作業車両1が圃場端(枕地)に至り第
1の作業路R1から第2の作業路R2に移動する時に、経路を何本飛ばすかを設定する。
具体的には、(1)スキップしない。(2)1列スキップ。(3)2列スキップ。のいず
れかを選択する。次に、オーバーラップの設定を行う。つまり、作業路R1と隣接する作
業路R2における作業幅の重複量の設定を行う。具体的には、(1)オーバーラップしな
い。(2)オーバーラップする。を選択する。なお、「オーバーラップする」を選択する
と、数値入力画面が表示され、数値を入力しないと次に進むことができない。
両100とにより、または、自律走行作業車両1により作業を行う作業領域HAの外側の
領域が設定される。言い換えれば、圃場端で非作業状態として旋回走行する枕地HBと、
枕地HBと枕地HBとの間の左右両側の圃場外周に接する非作業領域とする側部余裕地H
Cが設定される。よって、圃場H=作業領域HA+枕地HB+枕地HB+側部余裕地HC
+側部余裕地HCとなる。通常、枕地HBの幅Wbと側部余裕地HCの幅Wcは、作業車
両100が装着した作業機の幅の二倍以下の長さとして、自律走行作業車両1と作業車両
100とによる併走作業が終了した後に、作業者が作業車両100に乗り込み、手動操作
で外周を二周することで、仕上げることができるようにしている。但し、自律走行作業車
両1で外周を作業することも可能である。
業経路Raと走行経路Rbからなる経路Rが生成される。作業経路Raは作業領域HA内
で生成される経路で、作業を行いながら走行する経路であり、直線の経路となる。但し、
作業領域HAが矩形でない場合にははみ出すこともある。走行経路Rbは作業領域HA以
外の領域(枕地HBと側部余裕地HC)で生成される経路で、作業を行わずに走行する経
路であり、直線と曲線を組み合わせた経路となり、主に、枕地HBにおいて旋回するため
の経路となる。
れの作業経路Raと走行経路Rbが生成される。経路生成後にその経路を見たい場合は、
経路生成設定ボタン203をタッチすることでシミユレーション画像が表示され、確認す
ることができる。なお、経路生成設定ボタン203をタッチしなくても作業経路Raと走
行経路Rbは生成されている。自動で作業経路Raと走行経路Rbが生成される際に、作
業開始位置Sw、作業終了位置Gwは、圃場設定で登録した開始位置、終了位置から最も
近い対応する位置とされる。
定ボタン」「データ転送する」「ホームへ戻る」が選択可能に表示される。
ッチすることで転送できる。この転送は遠隔操作装置112で行われるため、これら設定
した情報を自律走行作業車両1の制御装置に転送する必要がある。この転送は、(1)端
子を用いて転送する方法と、(2)無線で転送する方法があり、本実施形態では、端子を
用いる場合には、USBケーブルを用いて遠隔操作装置112と自律走行作業車両1の制
御装置を直接つなぐ、あるいは、USBメモリに一旦記憶させてから、自律走行作業車両
1のUSB端子に接続して転送する。また、無線で転送する場合は、無線LANを用いて
転送する。
に示すように、自律走行作業車両1は、車体部2の位置情報である現在位置Nを取得可能
な位置情報取得部たる移動GPSアンテナ34を備えている。また、自律走行作業車両1
は、移動GPSアンテナ34で検出した現在位置Nを用いて車体部2の走行軌跡Kを特定
し、走行軌跡Kに基づいて車体部2の走行軌跡領域KAを特定することが可能な走行軌跡
領域特定部たる遠隔操作装置112を備えている。なお、自律走行作業車両1においては
、制御部30によって、走行軌跡Kに基づいて車体部2の走行軌跡領域KAを特定するこ
とも可能であり、遠隔操作装置112の代わりに、制御部30によって、車体部2の走行
軌跡領域KAを特定する構成としてもよい。
選択点たる角部P~Uに基づいて車体部2を走行させる走行領域たる圃場Hの形状(以下
、圃場形状HKと呼ぶ)を特定することが可能な走行領域特定部たる機能を兼ね備えてい
る。なお、自律走行作業車両1においては、制御部30によって、走行軌跡Kから選択さ
れる複数の選択点たる角部P~Uに基づいて圃場形状HKを特定することも可能であり、
遠隔操作装置112の代わりに、制御部30によって、圃場形状HKを特定する構成とし
てもよい。
能な補正部たる機能を兼ね備えている。なお、自律走行作業車両1においては、制御部3
0によって、圃場形状HKを補正する構成とすることも可能であり、遠隔操作装置112
の代わりに、制御部30によって、圃場形状HKを補正する構成としてもよい。
知部たる表示装置113を備えている。
る現在位置Nを取得可能な位置情報取得部たる移動GPSアンテナ34および現在位置N
を用いて特定される車体部2の走行軌跡Kに基づいて車体部2の走行軌跡領域KAを特定
可能な走行軌跡領域特定部であり、また、走行軌跡Kから選択される複数の選択点P~U
に基づいて車体部2を走行させる走行領域たる圃場Hの形状(圃場形状HK)を特定可能
な走行領域特定部であり、さらに、圃場形状HKを補正可能な補正部である遠隔操作装置
112および制御部30と、を備えるものである。
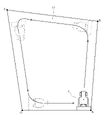
る。ここでは、図6に示すような凹凸形状を有する圃場Hを登録する場合を例示して説明
する。自律走行作業車両1では、図6に示すような圃場Hを圃場登録する場合、圃場Hの
外周に沿って、オペレータの運転によって自律走行作業車両1を走行させて、走行軌跡K
を取得する。図6に示すように、走行軌跡Kの形状は、圃場Hの外周形状に略一致してい
る。なお、自律走行作業車両1は、曲がる際には所定の旋回半径を要するため、走行軌跡
Kの角部は、実際の圃場Hの形状とは異なり円弧状となる。
示すように、本実施形態に示す走行軌跡Kには、P、Q、R、S、T、Uの6個の角部が
存在しており、図7に示すようなP、Q、R、S、T、Uの角部を有する走行軌跡Kが、
表示装置113上に表示される。
択し、圃場Hの形状(圃場形状HK)を設定する。例えば、図7に示すように、オペレー
タが、走行軌跡K上のP、Q、R、S、T、Uの6個の角部を選択した場合、図7に示す
ような圃場形状HKが設定される。オペレータが全ての角部を間違いなく選択すれば、図
7に示すように、圃場Hの形状に略一致した圃場形状HKを精度良く設定することができ
る。
択しなかった場合(即ち、角部Sを選択し忘れた場合)、図8に示すような五角形状の圃
場形状HKが設定される。この場合、圃場形状HKのうち三角形RSTに相当する部分は
、本来は圃場Hの外部の領域であるにも関わらず、圃場Hの一部(内部の領域)として設
定されてしまうこととなる。このような場合には、誤った圃場形状HKが設定されてしま
い、圃場H外に自律走行作業車両1の作業経路Raおよび走行経路Rbが設定されてしま
うおそれがある。
律走行作業車両1の作業経路Raや走行経路Rbが設定されてしまうことを防止するため
に、以下に説明する構成を採用している。
走行軌跡Kで囲まれた閉領域(以下、走行軌跡領域KAと呼ぶ)を、遠隔操作装置112
によって自動的に特定し、設定した圃場形状HK上の特定の点が、特定した走行軌跡領域
KAの外部に位置することを検出した場合には、遠隔操作装置112によって、圃場形状
HKの設定が誤っている(即ち、圃場形状HKが実際の圃場Hから食み出している)旨の
判断をする構成とすることができる。そして、遠隔操作装置112は、圃場形状HKが誤
っていると判断した場合には、遠隔操作装置112の表示装置113上に警報を発するよ
うに構成している。
、走行軌跡領域KA外に位置している場合に、圃場Hが走行軌跡領域KA外の領域を含む
と判定する判定部である遠隔操作装置112を備えるものである。そして、このような構
成の走行領域特定装置150によれば、圃場Hの外側に誤って経路R(作業経路Raおよ
び走行経路Rb)が設定されることをより確実に防止できる。
よって走行軌跡領域KAを自動的に特定するとともに、設定した圃場形状HKの面積と、
走行軌跡領域KAの面積とを比較して、圃場形状HKの面積が走行軌跡領域KAの面積を
超えている場合には、遠隔操作装置112によって、圃場形状HKの設定が誤っている(
即ち、圃場形状HKが実際の圃場Hから食み出している)旨の判断をする構成とすること
ができる。
軌跡領域KAの面積よりも大きい場合に、圃場形状HKが走行軌跡領域KA外の領域を含
むと判定する判定部たる遠隔操作装置112を備えるものである。そして、このような走
行領域特定装置150によれば、圃場Hの外側に誤って経路R(作業経路Raおよび走行
経路Rb)が設定されることをより確実に防止できる。
てもよく、食み出す部分の面積が所定の閾値を超えた場合に、食み出している旨の判断を
する構成とすることができる。
HKを、既知のマップ情報と比較する構成とすることも可能である。図9に示す如く、走
行領域特定装置150では、遠隔操作装置112に、予め圃場Hのマップ情報HMが記憶
されており、遠隔操作装置112によって、設定された圃場形状HKを、マップ情報HM
と比較する構成としている。マップ情報HMには、圃場Hの位置情報(端点の緯度経度)
、面積、形状等の情報が含まれている。そして、遠隔操作装置112は、圃場形状HKに
おいて、マップ情報HMと一致しない部分(例えば、図9に示す三角形RST)がある場
合には、遠隔操作装置112の表示装置113上に警報を発するように構成している。
場Hが走行軌跡領域KA外の領域を含むことを示唆するような報知内容としている。表示
装置113上に表示させる具体的な報知内容としては、例えば、「角部の選択が間違って
いないか確認が必要です」のように、オペレータに確認を促す文章を表示したり、あるい
は、「このまま経路生成を行うと圃場H外で経路生成が行われるおそれがあります」のよ
うな、警告文を表示したりする。
域外の領域を含むことを報知するのではなく、遠隔操作装置112によって、圃場Hが走
行軌跡Kの領域外の領域を含まないように、圃場形状HKを補正する構成としてもよい。
この場合には、表示装置113に、「圃場形状HKを補正するか否か」を確認する表示を
行い、オペレータが「補正する」ことを選択したときに、遠隔操作装置112による補正
を実行するように構成することができる。
タッチペンによる画面への指示でオペレータが修正することができるように構成されてお
り、例えば、オペレータが角部Sを追加で選択する操作を行うことで、圃場形状HKを補
正する構成とすることができる。
いて、遠隔操作装置112によって、食み出した部分を特定するとともに、特定した食み
出し部分を遠隔操作装置112によって削除するように圃場形状HKを補正する構成とす
ることができる。
る方法には限定されない。例えば、取得した走行軌跡Kを表示装置113に表示しておき
、オペレータがタッチペンによる画面への指示で、角部と辺部を指定することで圃場形状
HKを特定する構成としてもよく、このような特定方法によれば、角部を選択し忘れた場
合であっても、圃場形状HKを精度よく特定することができる。
た走行軌跡Kから、遠隔操作装置112によって自動的に圃場形状HKを生成する構成と
してもよく、さらに、自動的に生成された圃場形状HKをオペレータが確認し、実情に沿
うようにオペレータが適宜修正することで、より適切な圃場形状HKを取得する構成とし
てもよい。
を取得可能な位置情報取得部たる移動GPSアンテナ34と、現在位置Nを用いて特定さ
れる車体部2の走行軌跡Kに基づいて車体部2の走行軌跡領域KAを特定可能な走行軌跡
領域特定部であり、また、走行軌跡Kから選択される複数の選択点である角部P~Uに基
づいて車体部2を走行させる走行領域たる圃場形状HKを特定可能な走行領域特定部であ
る遠隔操作装置112と、所定の報知を実行可能な報知部たる表示装置113と、を備え
、所定の報知は、設定した圃場形状HKが走行軌跡領域KA外の領域を含むことを示唆す
る報知である。
を取得可能な位置情報取得部たる移動GPSアンテナ34と、現在位置Nを用いて特定さ
れる車体部2の走行軌跡Kに基づいて車体部2の走行軌跡領域KAを特定可能な走行軌跡
領域特定部であり、また、走行軌跡Kから選択される複数の選択点である角部P~Uに基
づいて車体部2を走行させる走行領域たる圃場形状HKを特定可能な走行領域特定部であ
り、さらに、圃場形状HKを補正可能な補正部である遠隔操作装置112と、を備え、遠
隔操作装置112は、設定した圃場形状HKが走行軌跡領域KA外の領域を含む場合に、
圃場形状HKを、走行軌跡領域KA外の領域を含まない領域に補正するものである。
路R(作業経路Raおよび走行経路Rb)の設定において、走行領域たる圃場Hの外側に
誤って経路Rが設定されることを防止することができる。
0に示すような圃場Hにおいて、2種類の作物(作物Xと作物Y)について、作物ごとに
領域を設定する場合を例示して説明する。ここでは、図10(A)に示すような略長方形
の圃場Hを二つの領域に分けて、一の領域で作物Xを栽培し、他の領域で作物Yを栽培す
る場合を例示して説明する。
場Hの外周形状を検出し、圃場H全体の圃場形状HKを特定する。ここでは、図10(B
)に示すように、角部PQRSを選択することで、圃場H全体の圃場形状HKが特定され
る。
で選択し、点PTUSで規定される矩形部分を、作物Xのための圃場形状HK1として特
定し、点QRUTで規定される矩形部分を、作物Yのための圃場形状HK2として特定す
る。
すように、作物Yの領域の一部を作物Xの領域として誤って圃場登録してしまうことが懸
念される。
の領域データDX・DYを予め取得しておき、この領域データDX・DYを各圃場形状H
K1・HK2と比較することによって、誤った圃場登録がなされることを防止する構成と
することができる。なお、作物X・Yの領域データDX・DYとしては、各領域の面積、
各領域における端点の位置情報、各領域の地図データ(形状、面積、位置情報を含む)等
を用いることができる。
き、遠隔操作装置112によって、特定した圃場形状HK1・HK2を領域データDX・
DYと比較することで、誤った圃場登録を防止することができる。
隔操作装置112によって、圃場形状HK1・HK2に誤りがある(重複部分がある)と
判断された場合には、表示装置113により報知する。あるいは、圃場形状HK1・HK
2に誤りがあると判断された場合には、遠隔操作装置112によって、特定した圃場形状
HK1・HK2が領域データDX・DYに整合するように点T・Uの配置を補正して、各
圃場形状HK1・HK2を補正する構成としてもよい。
34 移動GPSアンテナ(位置検出部)
30 制御部
112 遠隔操作装置
113 表示装置
150 走行領域特定装置
H 圃場(走行領域)
HK 圃場形状
K 走行軌跡
KA 走行軌跡領域
Claims (4)
- 車体部の走行を制御する走行制御部と、
前記車体部の位置情報を取得可能な位置情報取得部と、
前記位置情報を用いて特定される前記車体部の走行軌跡に基づいて前記車体部の走行軌跡領域を特定可能な走行軌跡領域特定部と、
前記走行軌跡から選択される複数の選択点について前記走行軌跡上で隣り合う選択点同士を連続する直線で結ぶことによって、前記走行制御部により前記車体部を走行させる走行領域を特定可能な走行領域特定部と、
所定の報知を実行可能な報知部と、を備え、
前記所定の報知は、前記走行領域が前記走行軌跡領域外の領域を含むことを報知することを特徴とする走行領域特定システム。 - 車体部の走行を制御する走行制御部と、
前記車体部の位置情報を取得可能な位置情報取得部と、
前記位置情報を用いて特定される前記車体部の走行軌跡に基づいて前記車体部の走行軌跡領域を特定可能な走行軌跡領域特定部と、
前記走行軌跡から選択される複数の選択点について前記走行軌跡上で隣り合う選択点同士を連続する直線で結ぶことによって、前記走行制御部により前記車体部を走行させる走行領域を特定可能な走行領域特定部と、
前記走行領域を補正可能な補正部と、を備え、
前記補正部は、前記走行領域が前記走行軌跡領域外の領域を含む場合に、前記走行領域を、前記走行軌跡領域外の領域を含まない領域に補正することを特徴とする走行領域特定システム。 - 車体部の走行を制御する走行制御部によって車体部を走行させる工程と、
前記車体部の位置情報を用いて前記車体部の走行軌跡を特定する工程と、
前記車体部の走行軌跡に基づいて前記車体部の走行軌跡領域をプロセッサにより特定する工程と、
前記走行軌跡から選択される複数の選択点について前記走行軌跡上で隣り合う選択点同士を連続する直線で結ぶことによって、前記車体部を走行させる走行領域をプロセッサにより特定する工程と、
特定された前記走行領域が前記走行軌跡領域外の領域を含む場合に所定の報知を実行する工程と、を含む走行領域特定方法。 - 車体部の走行を制御する走行制御部によって車体部を走行させる工程と、
前記車体部の位置情報を用いて前記車体部の走行軌跡を特定する工程と、
前記車体部の走行軌跡に基づいて前記車体部の走行軌跡領域をプロセッサにより特定する工程と、
前記走行軌跡から選択される複数の選択点について前記走行軌跡上で隣り合う選択点同士を連続する直線で結ぶことによって、前記車体部を走行させる走行領域をプロセッサにより特定する工程と、
特定された前記走行領域が前記走行軌跡領域外の領域を含む場合において、前記走行領域を前記走行軌跡領域外の領域を含まない領域へ補正する工程と、を含む走行領域特定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021037831A JP7179891B2 (ja) | 2021-03-09 | 2021-03-09 | 走行領域特定システム、走行領域特定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021037831A JP7179891B2 (ja) | 2021-03-09 | 2021-03-09 | 走行領域特定システム、走行領域特定方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019049088A Division JP6854312B2 (ja) | 2019-03-15 | 2019-03-15 | 走行領域特定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021089776A JP2021089776A (ja) | 2021-06-10 |
| JP7179891B2 true JP7179891B2 (ja) | 2022-11-29 |
Family
ID=76220381
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021037831A Active JP7179891B2 (ja) | 2021-03-09 | 2021-03-09 | 走行領域特定システム、走行領域特定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7179891B2 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008278840A (ja) | 2007-05-14 | 2008-11-20 | Kubota Corp | 作業車 |
| JP2009245003A (ja) | 2008-03-28 | 2009-10-22 | Kubota Corp | 作業車の走行制御装置 |
| JP2015167562A (ja) | 2014-11-21 | 2015-09-28 | ジオサーフ株式会社 | 圃場ガイダンスシステム及び圃場ガイダンス方法並びにソフトウェア及びソフトウェアを格納した記憶媒体 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2802525B2 (ja) * | 1989-11-29 | 1998-09-24 | 本田技研工業株式会社 | 自走車の走行コース設定装置 |
| JP2651662B2 (ja) * | 1994-10-28 | 1997-09-10 | 川崎重工業株式会社 | 軌道生成方法および軌道生成装置 |
-
2021
- 2021-03-09 JP JP2021037831A patent/JP7179891B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008278840A (ja) | 2007-05-14 | 2008-11-20 | Kubota Corp | 作業車 |
| JP2009245003A (ja) | 2008-03-28 | 2009-10-22 | Kubota Corp | 作業車の走行制御装置 |
| JP2015167562A (ja) | 2014-11-21 | 2015-09-28 | ジオサーフ株式会社 | 圃場ガイダンスシステム及び圃場ガイダンス方法並びにソフトウェア及びソフトウェアを格納した記憶媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021089776A (ja) | 2021-06-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6507109B2 (ja) | 作業車両の走行領域形状登録システム | |
| JP6594805B2 (ja) | 作業車両 | |
| EP3427562B1 (en) | Travel region specification device | |
| KR102144244B1 (ko) | 경로 생성 장치 | |
| JP7142597B2 (ja) | 走行領域形状登録システム | |
| JP6675135B2 (ja) | 経路生成装置 | |
| JP6531055B2 (ja) | 経路生成装置 | |
| JP6854312B2 (ja) | 走行領域特定装置 | |
| JP6499605B2 (ja) | 走行領域特定装置 | |
| AU2015347785B2 (en) | Field state detection system | |
| WO2017159801A1 (ja) | 自律走行システム | |
| JP2024096396A (ja) | 作業車両の自動走行方法および自動走行システム | |
| JP7179891B2 (ja) | 走行領域特定システム、走行領域特定方法 | |
| JP7140858B2 (ja) | 走行経路生成方法、走行経路生成システム | |
| JP7397919B2 (ja) | 経路生成装置 | |
| US20240324488A1 (en) | Agricultural work assistance system, agricultural machine, and agricultural work assistance device | |
| JP2021083343A (ja) | 領域登録システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210315 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220415 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20220415 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220823 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221012 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221108 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221116 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7179891 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |