JP6867015B2 - 自動加工装置 - Google Patents
自動加工装置 Download PDFInfo
- Publication number
- JP6867015B2 JP6867015B2 JP2017060902A JP2017060902A JP6867015B2 JP 6867015 B2 JP6867015 B2 JP 6867015B2 JP 2017060902 A JP2017060902 A JP 2017060902A JP 2017060902 A JP2017060902 A JP 2017060902A JP 6867015 B2 JP6867015 B2 JP 6867015B2
- Authority
- JP
- Japan
- Prior art keywords
- sample
- processing
- end position
- repeating structure
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012545 processing Methods 0.000 title claims description 131
- 239000002245 particle Substances 0.000 claims description 24
- 238000003754 machining Methods 0.000 claims description 21
- 238000000034 method Methods 0.000 claims description 12
- 230000001678 irradiating effect Effects 0.000 claims description 4
- 238000010884 ion-beam technique Methods 0.000 description 24
- 238000010586 diagram Methods 0.000 description 10
- 238000013461 design Methods 0.000 description 7
- 238000003384 imaging method Methods 0.000 description 6
- 238000012986 modification Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 150000002500 ions Chemical class 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
Images








Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/30—Electron-beam or ion-beam tubes for localised treatment of objects
- H01J37/305—Electron-beam or ion-beam tubes for localised treatment of objects for casting, melting, evaporating, or etching
- H01J37/3053—Electron-beam or ion-beam tubes for localised treatment of objects for casting, melting, evaporating, or etching for evaporating or etching
- H01J37/3056—Electron-beam or ion-beam tubes for localised treatment of objects for casting, melting, evaporating, or etching for evaporating or etching for microworking, e. g. etching of gratings or trimming of electrical components
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/30—Electron-beam or ion-beam tubes for localised treatment of objects
- H01J37/304—Controlling tubes by information coming from the objects or from the beam, e.g. correction signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/28—Preparing specimens for investigation including physical details of (bio-)chemical methods covered elsewhere, e.g. G01N33/50, C12Q
- G01N1/32—Polishing; Etching
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/28—Preparing specimens for investigation including physical details of (bio-)chemical methods covered elsewhere, e.g. G01N33/50, C12Q
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N23/00—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00
- G01N23/22—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by measuring secondary emission from the material
- G01N23/2202—Preparing specimens therefor
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/02—Details
- H01J37/20—Means for supporting or positioning the object or the material; Means for adjusting diaphragms or lenses associated with the support
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/26—Electron or ion microscopes; Electron or ion diffraction tubes
- H01J37/28—Electron or ion microscopes; Electron or ion diffraction tubes with scanning beams
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/30—Electron-beam or ion-beam tubes for localised treatment of objects
- H01J37/317—Electron-beam or ion-beam tubes for localised treatment of objects for changing properties of the objects or for applying thin layers thereon, e.g. for ion implantation
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/30—Electron or ion beam tubes for processing objects
- H01J2237/304—Controlling tubes
- H01J2237/30466—Detecting endpoint of process
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/30—Electron or ion beam tubes for processing objects
- H01J2237/317—Processing objects on a microscale
- H01J2237/3174—Etching microareas
- H01J2237/31745—Etching microareas for preparing specimen to be viewed in microscopes or analyzed in microanalysers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/30—Electron or ion beam tubes for processing objects
- H01J2237/317—Processing objects on a microscale
- H01J2237/31749—Focused ion beam
Landscapes
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Plasma & Fusion (AREA)
- Engineering & Computer Science (AREA)
- Sampling And Sample Adjustment (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
- Electrical Discharge Machining, Electrochemical Machining, And Combined Machining (AREA)
Description
例えばメモリーデバイスなどの同じ構造物が並んで繰り返し構造を有している試料を荷電粒子ビームで加工する場合において、例えば任意の構造物一つを残してTEM解析用試料(TEM試料)を作製する場合がある。このように細長い構造物の長手方向に対して試料を作製する場合や列を成している構造物の列に沿って試料を作製する場合、構造物や列に対して水平に加工できるよう荷電粒子ビームの走査方向を補正する。これは、TEM試料作製に限らず断面を作製する場合は全て同様である。
(1)本発明の一態様に係る自動加工装置は、荷電粒子ビームを、繰り返し構造を有する試料に照射することにより当該試料から試料片を作製する自動加工装置であって、加工前の試料の構造を示す情報であって、加工前の前記試料の前記繰り返し構造が撮像された画像である構造情報を取得する構造情報取得部と、前記試料の前記繰り返し構造の繰り返し数を示す情報であって、加工の終了位置を指定する終了位置指定情報を取得する加工終了位置取得部と、荷電粒子ビームが前記試料に照射された位置に現れる加工面が撮像された加工面画像を取得する画像取得部と、前記構造情報取得部が取得する加工前の前記試料が撮像された画像が示す前記繰り返し構造の繰り返し数と、前記画像取得部が取得する前記加工面画像が示す前記繰り返し構造の繰り返し数との比較に基づいて、荷電粒子ビームによる加工位置が前記終了位置に到達したか否かを判定する判定部と、を備える。
像された画像が示す前記繰り返し構造の繰り返し数と、前記加工面画像が示す前記繰り返
し構造の残数との比較に基づいて、荷電粒子ビームによる加工位置が前記終了位置に到達
したか否かを判定する。
像された画像が示す前記繰り返し構造の繰り返し数と、加工過程において前記加工面画像
に順次現れる前記繰り返し構造の変化数との比較に基づいて、荷電粒子ビームによる加工
位置が前記終了位置に到達したか否かを判定する。
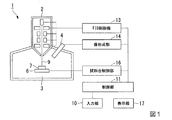
図1は、本発明の実施形態に係る自動加工装置1の構成図である。
本実施形態の自動加工装置1は、図1に示すように、FIB鏡筒2と、試料室3と、二次電子検出器4と、試料台6とを備えている。
FIB鏡筒2は、試料室3内に収容された試料7に集束イオンビーム(FIB)を照射する。以下の説明において集束イオンビームを単にイオンビーム9とも記載する。
二次電子検出器4は、荷電粒子検出器であって、イオンビーム9の照射により試料7から発生した二次電子を検出する。
試料台6には、試料7が載置される。試料台6は、傾斜させることにより試料7へのイオンビーム9の入射角度を変更する。
試料台制御部16は、試料台6に傾斜角制御信号を出力することにより、試料台6の傾斜を制御する。
FIB制御部13は、FIB鏡筒2に照射制御信号を出力することにより、FIB鏡筒2からイオンビーム9を照射させる。
像形成部14は、FIB制御部13のイオンビーム9を走査させる信号と、二次電子検出器4で検出した二次電子の信号とからSIM像のデータを生成する。
表示部17は、像形成部14が生成したSIM像のデータに基づいてSIM像を表示する。
入力部10は、オペレータの操作を検出し、検出した操作を示す情報を制御部11に供給する。オペレータが入力部10に対して加工の開始の操作を行うと、入力部10は加工開始の指示を制御部11に送信する。
制御部11は、自動断面加工観察のアルゴリズムを実行する。
次に図2を参照して、本実施形態の試料7の構造の一例について説明する。
図2は、本実施形態の試料7の構造の一例を示す図である。なお、以下において必要な場合にはxyz直交座標系を用いて説明する。このxyz直交座標系のx軸及びy軸は、試料7が試料台6に載置されている平面を示す。z軸は、試料7が試料台6に載置されている平面の法線を示す。この一例の場合、試料7は、x軸方向に同一の構造が繰り返し現れる繰り返し構造RSを有する。この具体例では、試料7は、繰り返し構造RS1から繰り返し構造RS7までの7個の繰り返し構造RSを有する。
本実施形態では、試料7を加工することにより、繰り返し構造RSのうち繰り返し構造RS4を解析対象の試料片として試料7から切り出す場合を一例にして説明する。
図3は、本実施形態の制御部11の機能構成の一例を示す図である。制御部11は、例えばCPUを備えており、画像取得部110と、構造情報取得部111と、終了位置取得部112と、判定部113と、加工制御部114とをその機能部として備える。
終了位置取得部112は、終了位置指定情報PSを取得する。この終了位置指定情報PSとは、試料7の構造に対応する加工の終了位置PSTOPを指定する情報である。この加工の終了位置PSTOPの指定は、加工開始前にオペレータによって行われる。具体的には、オペレータは、試料7の繰り返し構造RSのうちから解析対象の試料片にする部分を決定する。この一例では、オペレータは、試料7の繰り返し構造RS4を解析対象の試料片として決定する。オペレータは、入力部10に対して繰り返し構造RS4を解析対象の試料片として決定する操作を行う。入力部10は、オペレータによるこの操作を検出すると、試料7を加工した際に繰り返し構造RS4が残される位置を加工の終了位置とする終了位置指定情報PSを、終了位置取得部112に対して出力する。終了位置取得部112は、この終了位置指定情報PSを取得する。
次に、図4から図7を参照して制御部11の動作の一例について説明する。なお、本実施形態では、自動加工装置1が、図2に示した試料7に対してイオンビーム9を照射することにより試料7から試料片である繰り返し構造RS4を作成する場合を一例にして説明する。
次に、図6を参照して、自動加工装置1が、図4に示した加工前の試料7を図5に示した加工後の試料7に加工する手順について、図6を参照して説明する。
(ステップS10)構造情報取得部111は、構造情報STを取得する。構造情報取得部111が取得する構造情報STとは、加工前の試料7の構造を示す情報である。この具体例では、構造情報STが、図4に示す加工前の試料7の画像であるとして説明する。この場合、構造情報STには、試料7のxz断面に現れている繰り返し構造RSの画像が含まれている。つまり構造情報STは、試料7に含まれる繰り返し構造RSの数を示している。
ここで、自動加工装置1のオペレータは、試料片として切り出す対象を、試料7の座標ではなく繰り返し構造RSの数によって指定したい場合がある。例えば、オペレータは「試料7の位置x0からカウントして4個目の繰り返し構造RS(つまり繰り返し構造RS4)を試料片として切り出す」と指定したい場合がある。この場合、オペレータは「4個目を試料片として切り出す」と指定する操作を行う。終了位置取得部112は、このオペレータによる操作を終了位置指定情報PSとして取得する。
上述した具体例の場合、試料7の位置x0からカウントして4個目の繰り返し構造RS(つまり、繰り返し構造RS4)を試料片として切り出す。この場合、判定部113は、波形W1の山の数を位置x0から第1加工の進行方向D1方向(+x方向)にカウントする。判定部113は、図7(C)に示すように、波形W1の山の数のカウント結果が“4”になる位置xs1を第1加工の終了位置PSTOPと判定する。
(ステップS30)加工制御部114は、試料7に対する加工を開始する。
(ステップS40)加工制御部114は、FIB制御部13にFIB制御指示ICFを、試料台制御部16に試料台制御指示ICSをそれぞれ出力することにより、試料7に対するスライス加工を実施する。
本実施形態における具体例の場合、加工面画像SFとは、試料7がx方向視によって撮像された画像である。加工面画像SFには、試料7のyz断面、つまり加工面の状態が示されている。加工制御部114によってスライス加工がx方向に順次進められると、加工面に繰り返し構造RSが現れる場合と、加工面に繰り返し構造RSが現れない場合とが生じる。したがって、加工面画像SFを加工の時間軸にそって順次取得して、加工面に繰り返し構造RSが現れる回数をカウントすれば、加工の進捗度を判定することができる。
具体的には、判定部113は、ステップS50において取得された加工面画像SFに繰り返し構造RSが現れていない状態から、繰り返し構造RSが現れた状態への変化の回数をカウントする(図7(C)を参照。)。判定部113は、このカウント結果と、加工開始位置である位置x0から終了位置PSTOPまでの繰り返し構造RSの数(この一例では“4”)とを比較する。
判定部113は、比較の結果、このカウント結果と位置x0から終了位置PSTOPまでの繰り返し構造RSの数とが一致した場合には、加工位置が終了位置PSTOPに到達したと判定し(ステップS70;YES)、加工を終了して(ステップS80)一連の処理を終了する。
以上説明したように、本実施形態の自動加工装置1は、構造情報STと終了位置指定情報PSとに基づいて、試料7から試料片を作成する際の加工を人手によらず自動的に終了させる。つまり、本実施形態の自動加工装置1は、荷電粒子ビームによる加工位置が終了位置に到達したか否かを自動的に判定する。したがって、自動加工装置1によれば、オペレータのスキルレベルに左右されない試料作製が可能となる。また、自動加工装置1によれば、無人動作が可能となり業務効率の改善や装置稼働率の底上げも可能となる。
これまで、構造情報STが、加工前の試料7が撮像された画像である場合を一例にして説明した。ここで、加工前の試料7の表面に繰り返し構造RSが現れていない場合には、この試料7が有する繰り返し構造RSの数をカウントすることができない場合がある。このような場合には、加工前の試料7の一部を予めスライス加工することにより繰り返し構造RSを露出させた状態で撮像された画像を、構造情報STとしてもよい。この場合、例えば図2に示すxz平面を加工面にしてスライス加工することにより、繰り返し構造RSを露出させる。
ここで判定部113が、試料7の設計情報と加工面画像SFとの比較に基づいて加工位置が終了位置PSTOPに到達したか否かを判定する場合の具体例について説明する。
また、試料7の加工面の画像化を行う検出器が、二次電子検出器4(荷電粒子検出器)である場合を一例にして説明したが、試料7の断面から試料7の構造が把握できる検出器であればよく、これに限られない。
Claims (3)
- 荷電粒子ビームを、繰り返し構造を有する試料に照射することにより当該試料から試料片を作製する自動加工装置であって、
加工前の試料の構造を示す情報であって、加工前の前記試料の前記繰り返し構造が撮像された画像である構造情報を取得する構造情報取得部と、
前記試料の前記繰り返し構造の繰り返し数を示す情報であって、加工の終了位置を指定する終了位置指定情報を取得する加工終了位置取得部と、
荷電粒子ビームが前記試料に照射された位置に現れる加工面が撮像された加工面画像を取得する画像取得部と、
前記構造情報取得部が取得する加工前の前記試料が撮像された画像が示す前記繰り返し構造の繰り返し数と、前記画像取得部が取得する前記加工面画像が示す前記繰り返し構造の繰り返し数との比較に基づいて、荷電粒子ビームによる加工位置が前記終了位置に到達したか否かを判定する判定部と、
を備える自動加工装置。 - 前記判定部は、加工前の前記試料が撮像された画像が示す前記繰り返し構造の繰り返し数と、前記加工面画像が示す前記繰り返し構造の残数との比較に基づいて、荷電粒子ビームによる加工位置が前記終了位置に到達したか否かを判定する
請求項1に記載の自動加工装置。 - 前記判定部は、加工前の前記試料が撮像された画像が示す前記繰り返し構造の繰り返し数と、加工過程において前記加工面画像に順次現れる前記繰り返し構造の変化数との比較に基づいて、荷電粒子ビームによる加工位置が前記終了位置に到達したか否かを判定する
請求項1に記載の自動加工装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017060902A JP6867015B2 (ja) | 2017-03-27 | 2017-03-27 | 自動加工装置 |
| TW107107255A TWI776861B (zh) | 2017-03-27 | 2018-03-05 | 自動加工裝置 |
| KR1020197024366A KR102490980B1 (ko) | 2017-03-27 | 2018-03-27 | 자동 가공 장치 |
| US16/496,275 US10971330B2 (en) | 2017-03-27 | 2018-03-27 | Automatic processing device |
| CN201880020177.4A CN110494733B (zh) | 2017-03-27 | 2018-03-27 | 自动加工装置 |
| PCT/JP2018/012608 WO2018181408A1 (ja) | 2017-03-27 | 2018-03-27 | 自動加工装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017060902A JP6867015B2 (ja) | 2017-03-27 | 2017-03-27 | 自動加工装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018163067A JP2018163067A (ja) | 2018-10-18 |
| JP6867015B2 true JP6867015B2 (ja) | 2021-04-28 |
Family
ID=63678198
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017060902A Active JP6867015B2 (ja) | 2017-03-27 | 2017-03-27 | 自動加工装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10971330B2 (ja) |
| JP (1) | JP6867015B2 (ja) |
| KR (1) | KR102490980B1 (ja) |
| CN (1) | CN110494733B (ja) |
| TW (1) | TWI776861B (ja) |
| WO (1) | WO2018181408A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7173937B2 (ja) | 2019-08-08 | 2022-11-16 | 株式会社日立ハイテク | 荷電粒子線装置 |
| JP7159128B2 (ja) | 2019-08-08 | 2022-10-24 | 株式会社日立ハイテク | 荷電粒子線装置 |
| JP7189103B2 (ja) * | 2019-08-30 | 2022-12-13 | 株式会社日立ハイテク | 荷電粒子線装置 |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU655677B2 (en) * | 1991-10-08 | 1995-01-05 | Canon Kabushiki Kaisha | Electron-emitting device, and electron beam-generating apparatus and image-forming apparatus employing the device |
| US6172363B1 (en) * | 1996-03-05 | 2001-01-09 | Hitachi, Ltd. | Method and apparatus for inspecting integrated circuit pattern |
| US20060060781A1 (en) * | 1997-08-11 | 2006-03-23 | Masahiro Watanabe | Charged-particle beam apparatus and method for automatically correcting astigmatism and for height detection |
| EP0973069A3 (en) * | 1998-07-14 | 2006-10-04 | Nova Measuring Instruments Limited | Monitoring apparatus and method particularly useful in photolithographically processing substrates |
| US6649919B2 (en) * | 2000-09-20 | 2003-11-18 | Fei Company | Real time monitoring simultaneous imaging and exposure in charged particle beam systems |
| US20040262515A1 (en) * | 2001-10-05 | 2004-12-30 | Taiko Motoi | Information acquisition apparatus, cross section evaluating apparatus, and cross section evaluating method |
| JP4183492B2 (ja) * | 2002-11-27 | 2008-11-19 | 株式会社日立製作所 | 欠陥検査装置および欠陥検査方法 |
| US7361865B2 (en) * | 2003-08-27 | 2008-04-22 | Kyocera Corporation | Heater for heating a wafer and method for fabricating the same |
| JP4220358B2 (ja) * | 2003-11-27 | 2009-02-04 | 株式会社日立ハイテクノロジーズ | 半導体パターン計測方法 |
| JP4474337B2 (ja) * | 2005-07-08 | 2010-06-02 | 株式会社日立ハイテクノロジーズ | 試料作製・観察方法及び荷電粒子ビーム装置 |
| JP5127148B2 (ja) * | 2006-03-16 | 2013-01-23 | 株式会社日立ハイテクノロジーズ | イオンビーム加工装置 |
| WO2008140585A1 (en) * | 2006-11-22 | 2008-11-20 | Nexgen Semi Holding, Inc. | Apparatus and method for conformal mask manufacturing |
| DE102008064781B3 (de) * | 2007-04-23 | 2016-01-07 | Hitachi High-Technologies Corporation | lonenstrahlbearbeitungs-/Betrachtungsvorrichtung |
| JP5028159B2 (ja) * | 2007-06-29 | 2012-09-19 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置 |
| JP4965481B2 (ja) * | 2008-02-15 | 2012-07-04 | エスアイアイ・ナノテクノロジー株式会社 | 複合荷電粒子ビーム装置、それを用いた試料加工方法及び透過電子顕微鏡用試料作製方法 |
| JP5296413B2 (ja) * | 2008-05-15 | 2013-09-25 | 株式会社日立ハイテクサイエンス | 複合荷電粒子ビーム装置を用いた断面画像取得方法および複合荷電粒子ビーム装置 |
| EP2233907A1 (en) | 2009-03-27 | 2010-09-29 | FEI Company | Forming an image while milling a work piece |
| WO2011016254A1 (ja) * | 2009-08-07 | 2011-02-10 | 株式会社ニコン | 移動体装置、露光装置及び露光方法、並びにデバイス製造方法 |
| JP2011054497A (ja) * | 2009-09-03 | 2011-03-17 | Sii Nanotechnology Inc | 断面加工観察方法および装置 |
| DE102010003056B9 (de) * | 2010-03-19 | 2014-07-31 | Carl Zeiss Microscopy Gmbh | Verfahren zur Erzeugung von Bildern einer Probe |
| JP5292348B2 (ja) * | 2010-03-26 | 2013-09-18 | 株式会社日立ハイテクノロジーズ | 複合荷電粒子線装置 |
| US8350237B2 (en) * | 2010-03-31 | 2013-01-08 | Fei Company | Automated slice milling for viewing a feature |
| JP5596141B2 (ja) * | 2010-05-27 | 2014-09-24 | 株式会社日立ハイテクノロジーズ | 画像処理装置、荷電粒子線装置、荷電粒子線装置調整用試料、およびその製造方法 |
| EP2756282A4 (en) * | 2011-09-12 | 2015-01-21 | Fei Co | SHINE ANGLE TILLER |
| JP5872922B2 (ja) | 2012-02-21 | 2016-03-01 | 株式会社日立ハイテクサイエンス | 試料作製方法及び装置 |
| JP5852474B2 (ja) * | 2012-03-01 | 2016-02-03 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置 |
| JP5990016B2 (ja) | 2012-03-23 | 2016-09-07 | 株式会社日立ハイテクサイエンス | 断面加工観察装置 |
| JP6002489B2 (ja) * | 2012-07-23 | 2016-10-05 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置及び試料作製方法 |
| JP6250331B2 (ja) * | 2012-08-30 | 2017-12-20 | 株式会社日立ハイテクサイエンス | 複合荷電粒子ビーム装置及び薄片試料加工方法 |
| CA2907483C (en) * | 2013-03-22 | 2020-07-21 | Eth Zurich | Laser ablation cell |
| JP6112929B2 (ja) * | 2013-03-25 | 2017-04-12 | 株式会社日立ハイテクサイエンス | 集束イオンビーム装置、それを用いた試料の加工方法、及び集束イオンビームを用いた試料の加工コンピュータプログラム |
| JP6226781B2 (ja) * | 2013-03-27 | 2017-11-08 | 株式会社日立ハイテクサイエンス | 集束イオンビーム装置、それを用いた試料の加工方法、及び集束イオンビーム加工用コンピュータプログラム |
| JP6327617B2 (ja) * | 2013-10-30 | 2018-05-23 | 株式会社日立ハイテクサイエンス | 荷電粒子ビーム装置 |
| US9620333B2 (en) * | 2014-08-29 | 2017-04-11 | Hitachi High-Tech Science Corporation | Charged particle beam apparatus |
| JP6423222B2 (ja) * | 2014-09-26 | 2018-11-14 | 株式会社日立ハイテクサイエンス | 荷電粒子ビーム装置 |
| US10469777B2 (en) * | 2015-03-23 | 2019-11-05 | Techinsights Inc. | Methods, systems and devices relating to distortion correction in imaging devices |
| JP6885576B2 (ja) * | 2017-01-19 | 2021-06-16 | 株式会社日立ハイテクサイエンス | 荷電粒子ビーム装置 |
| JP6900027B2 (ja) * | 2017-03-28 | 2021-07-07 | 株式会社日立ハイテクサイエンス | 試料トレンチ埋込方法 |
| US10546719B2 (en) * | 2017-06-02 | 2020-01-28 | Fei Company | Face-on, gas-assisted etching for plan-view lamellae preparation |
| JP6541161B2 (ja) * | 2017-11-17 | 2019-07-10 | 株式会社日立ハイテクサイエンス | 荷電粒子ビーム装置 |
| JP7031859B2 (ja) * | 2018-02-20 | 2022-03-08 | 株式会社日立ハイテクサイエンス | 荷電粒子ビーム装置、試料加工観察方法 |
-
2017
- 2017-03-27 JP JP2017060902A patent/JP6867015B2/ja active Active
-
2018
- 2018-03-05 TW TW107107255A patent/TWI776861B/zh active
- 2018-03-27 US US16/496,275 patent/US10971330B2/en active Active
- 2018-03-27 KR KR1020197024366A patent/KR102490980B1/ko active IP Right Grant
- 2018-03-27 WO PCT/JP2018/012608 patent/WO2018181408A1/ja active Application Filing
- 2018-03-27 CN CN201880020177.4A patent/CN110494733B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018181408A1 (ja) | 2018-10-04 |
| US20200035453A1 (en) | 2020-01-30 |
| KR20190132991A (ko) | 2019-11-29 |
| US10971330B2 (en) | 2021-04-06 |
| TW201837958A (zh) | 2018-10-16 |
| TWI776861B (zh) | 2022-09-11 |
| KR102490980B1 (ko) | 2023-01-19 |
| CN110494733B (zh) | 2022-07-08 |
| JP2018163067A (ja) | 2018-10-18 |
| CN110494733A (zh) | 2019-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102207472B (zh) | 用于观察特征的自动化片状铣削 | |
| JP6867015B2 (ja) | 自動加工装置 | |
| JP6002489B2 (ja) | 荷電粒子線装置及び試料作製方法 | |
| JP6355318B2 (ja) | 断面加工観察方法及び装置 | |
| US9934938B2 (en) | Focused ion beam apparatus, method for observing cross-section of sample by using the same, and storage medium | |
| EP3223298A3 (en) | Method for 3d-imaging from cross-section processing and observation, and fib-sem apparatus therefor | |
| JP5990016B2 (ja) | 断面加工観察装置 | |
| JP2008256541A (ja) | 荷電粒子システム | |
| TW201350788A (zh) | X射線檢查方法及x射線檢查裝置 | |
| CN109841534A (zh) | 截面加工观察方法、带电粒子束装置 | |
| DE112015006181B4 (de) | Ladungsträgerstrahlvorrichtung, Ausrichtungsverfahren für die Ladungsträgerstrahlvorrichtung, Ausrichtungsprogramm und Speichermedium | |
| CN208420756U (zh) | 一种成像系统 | |
| US10373881B2 (en) | Defect analysis | |
| CN114509326A (zh) | 用于用体积样本来制备微样本的方法和显微镜系统 | |
| JP2011080944A (ja) | X線ct装置 | |
| EP3227670B1 (en) | A method of x-ray nano-radiography and nanotomography and a device for executing this method | |
| CN110243318A (zh) | 截面加工观察装置及其方法、程序以及形状测定方法 | |
| JP2014013227A (ja) | 鋳造粗形材検査装置および鋳造粗形材検査方法 | |
| JP2015052472A (ja) | 欠陥検査装置および欠陥検査方法 | |
| JP2022116546A (ja) | 形状計測装置及び観察システム | |
| JP5934521B2 (ja) | 試料解析装置 | |
| JP2010257675A (ja) | 線分析機能を備える電子線装置 | |
| JP2014185940A (ja) | Epmaによる金属表面の金属濃度の評価方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181102 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200205 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201117 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20201225 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210309 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210401 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6867015 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |