JP6442036B1 - 掘削装置及び掘削方法 - Google Patents
掘削装置及び掘削方法 Download PDFInfo
- Publication number
- JP6442036B1 JP6442036B1 JP2017244147A JP2017244147A JP6442036B1 JP 6442036 B1 JP6442036 B1 JP 6442036B1 JP 2017244147 A JP2017244147 A JP 2017244147A JP 2017244147 A JP2017244147 A JP 2017244147A JP 6442036 B1 JP6442036 B1 JP 6442036B1
- Authority
- JP
- Japan
- Prior art keywords
- unit
- excavation
- power
- sensor
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Percussive Tools And Related Accessories (AREA)
- Earth Drilling (AREA)
- Drilling And Boring (AREA)
- Processing Of Stones Or Stones Resemblance Materials (AREA)
Abstract
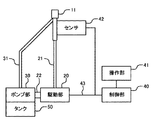
【解決手段】本発明の一実施形態に係る掘削装置1は、動力を発生させる駆動部20と、駆動部20からの動力を用いて掘削を行う掘削部11を取り付け可能な筐体10と、駆動部20からの動力を用いて掘削部11に液体を供給するポンプ部30と、を有する。筐体10には、掘削部11へ供給される液体を保持する容器であるタンク50が設けられている。また、掘削装置1は、掘削部11による掘削の情報を測定するセンサと、センサによる測定内容に基づいて駆動部20を制御する制御部40を有する。
【選択図】図1
Description
[掘削装置1の概要]
図1は、本実施形態に係る掘削装置1の外観図である。図1において、部材の内部の構造は破線で表されている。掘削装置1は、コンクリート、金属材、木材等の対象物の掘削(穿孔、切断、切削を含む)を行うことができる電動の工具であり、例えば振動ドリル又はハンマードリルである。掘削装置1は、筐体10と、駆動部20と、ポンプ部30と、制御部40と、タンク50と、を有する。
図2は、本実施形態に係る掘削装置1の模式図である。駆動部20は、電力の供給を受けて駆動すると、第1動力伝達部21を介して掘削部11に動力を与えるとともに、第2動力伝達部22を介してポンプ部30に動力を与える。
図3は、本実施形態に係る掘削装置1のブロック図である。図3において、矢印は主な情報の流れを示しており、図3に示したもの以外の情報の流れがあってよい。図3において、各ブロックはハードウェア(装置)単位の構成ではなく、機能単位の構成を示している。そのため、図3に示すブロックは単一の装置内に実装されてよく、あるいは複数の装置内に別れて実装されてよい。
図4は、本実施形態に係る掘削装置1による掘削方法のフローチャートを示す図である。図4のフローチャートは、例えば掘削装置1の電源が入れられた場合に開始される。
本実施形態に係る掘削装置1は、駆動部20から第1動力伝達部21を介して掘削部11に動力を伝達させるとともに、第2動力伝達部22を介してポンプ部30に動力を伝達させる。このような構成によれば、単一の駆動部20によって掘削部11及びポンプ部30が作動するため、複数の駆動部を備える構成よりも掘削装置1を軽量化できる。また、複数の駆動部を備える構成では少なくとも1つの駆動部が故障すると作業の続行ができなくなるのに対して、本実施形態に係る掘削装置1は単一の駆動部20を備えるため全体として故障が発生する確率を低くすることができる。
第1の実施形態に係る掘削装置1は掘削部11と共通の駆動部20を用いてポンプ部30による液体の供給を行うのに対して、本実施形態に係る掘削装置1はタンク50内の液体の自重によって液体の供給を行う。このような構成によっても、追加の駆動部を必要とせずに、掘削部11へ液体の供給を行うことができる。
本実施形態によれば、筐体10の上方に設けられたタンク50から掘削部11へ液体を自重で供給できるため、複数の駆動部を備える構成よりも掘削装置1を軽量化できる。また、複数の駆動部を備える構成では少なくとも1つの駆動部が故障すると作業の続行ができなくなるのに対して、本実施形態に係る掘削装置1は単一の駆動部20を備えるため全体として故障が発生する確率を低くすることができる。また、タンク50から掘削部11へ液体を自重で供給する際には、電力を消費しない。
10 筐体
20 駆動部
21 第1動力伝達部
22 第2動力伝達部
30 ポンプ部
31 供給管
40 制御部
42 センサ
44 記憶部
50 タンク
Claims (9)
- 動力を発生させる駆動部と、
前記駆動部からの動力を用いて掘削を行う掘削部を取り付け可能な筐体と、
前記駆動部からの動力を用いて前記掘削部に液体を供給するポンプ部と、
前記駆動部からの動力を前記掘削部に伝達する第1動力伝達部と、
前記駆動部からの動力を前記ポンプ部に伝達する第2動力伝達部と、
を有し、
前記第1動力伝達部及び前記第2動力伝達部は、それぞれ動力を伝達する状態と動力を伝達しない状態との間で切り替え可能である、掘削装置。 - 前記掘削部による掘削の情報を測定するセンサと、
前記センサによる測定内容に基づいて前記駆動部を制御する制御部と、
をさらに有する、請求項1に記載の掘削装置。 - 前記センサは、前記掘削部が前記掘削の対象物に押し付けられる力又は前記掘削の対象物の硬さを前記掘削の情報として測定し、
前記制御部は、前記センサが測定した前記掘削部が前記掘削の対象物に押し付けられる力又は前記掘削の対象物の硬さに応じて前記ポンプ部から前記掘削部へ供給する前記液体の量を調整するように前記駆動部を制御する、請求項2に記載の掘削装置。 - 前記センサによる測定内容と前記駆動部の駆動の制御との関係を示す制御情報を記憶する記憶部をさらに有し、
前記制御部は、前記記憶部から読み出した前記制御情報に従って、前記センサによる測定内容に応じて前記駆動部を制御する、請求項2又は3に記載の掘削装置。 - 前記筐体に対して重力方向に沿って上方に設けられた、前記液体を保持する容器と、
前記容器から重力方向に沿って下方に延在し、前記掘削部に前記液体を供給する管と、をさらに有する、請求項1から4のいずれか一項に記載の掘削装置。 - 駆動部と、掘削部を取り付け可能な筐体と、ポンプ部と、前記駆動部からの動力を前記掘削部に伝達する第1動力伝達部と、前記駆動部からの動力を前記ポンプ部に伝達する第2動力伝達部と、を備える掘削装置が実行する、
前記駆動部に動力を発生させるステップと、
前記掘削部に前記駆動部からの動力を用いて掘削を行わせるステップと、
前記掘削を行わせるステップと同時に、前記ポンプ部に前記駆動部からの動力を用いて前記掘削部に液体を供給させるステップと、
前記第1動力伝達部及び前記第2動力伝達部を、それぞれ動力を伝達する状態と動力を伝達しない状態との間で切り替えるステップと、
を有する掘削方法。 - 制御部が掘削の情報を測定するセンサからの測定内容を取得するステップをさらに有し、
前記動力を発生させるステップにおいて、前記制御部は、前記センサによる測定内容に基づいて、前記駆動部を制御する、請求項6に記載の掘削方法。 - 前記測定内容を取得するステップにおいて、前記制御部は、前記センサが前記掘削の情報として測定した前記掘削部が前記掘削の対象物に押し付けられる力又は前記掘削の対象物の硬さを取得し、
前記動力を発生させるステップにおいて、前記制御部は、前記センサが測定した前記掘削部が前記掘削の対象物に押し付けられる力又は前記掘削の対象物の硬さに応じて、前記液体を供給するステップで前記ポンプ部から前記掘削部へ供給する前記液体の量を調整するように前記駆動部を制御する、請求項7に記載の掘削方法。 - 前記制御部が前記センサによる測定内容と前記駆動部の駆動の制御との関係を示す制御情報を記憶部から読み出すステップをさらに有し、
前記動力を発生させるステップにおいて、前記制御部は、前記記憶部から読み出した前記制御情報に従って、前記センサによる測定内容に応じて前記駆動部を制御する、請求項7又は8に記載の掘削方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017244147A JP6442036B1 (ja) | 2017-12-20 | 2017-12-20 | 掘削装置及び掘削方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017244147A JP6442036B1 (ja) | 2017-12-20 | 2017-12-20 | 掘削装置及び掘削方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018218966A Division JP7231194B2 (ja) | 2018-11-22 | 2018-11-22 | 掘削装置及び掘削方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6442036B1 true JP6442036B1 (ja) | 2018-12-19 |
| JP2019107754A JP2019107754A (ja) | 2019-07-04 |
Family
ID=64668509
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017244147A Active JP6442036B1 (ja) | 2017-12-20 | 2017-12-20 | 掘削装置及び掘削方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6442036B1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019111642A (ja) * | 2018-11-22 | 2019-07-11 | 株式会社神名テックス | 掘削装置及び掘削方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021199791A1 (ja) * | 2020-03-31 | 2021-10-07 | 株式会社ミヤナガ | 穿孔装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58107807U (ja) * | 1982-01-13 | 1983-07-22 | 石原 将光 | コンクリ−ト穿孔機 |
| JPH04217411A (ja) * | 1990-12-20 | 1992-08-07 | Miyanaga:Kk | 穿孔用給水装置 |
| JPH0639377U (ja) * | 1992-11-02 | 1994-05-24 | 剛 小貫 | 破砕機用補助装置 |
| JP2010173053A (ja) * | 2009-02-02 | 2010-08-12 | Hitachi Koki Co Ltd | 電動穿孔工具 |
| CN205915531U (zh) * | 2016-08-28 | 2017-02-01 | 赵夫超 | 一种小型无尘瓷砖切割机 |
-
2017
- 2017-12-20 JP JP2017244147A patent/JP6442036B1/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58107807U (ja) * | 1982-01-13 | 1983-07-22 | 石原 将光 | コンクリ−ト穿孔機 |
| JPH04217411A (ja) * | 1990-12-20 | 1992-08-07 | Miyanaga:Kk | 穿孔用給水装置 |
| JPH0639377U (ja) * | 1992-11-02 | 1994-05-24 | 剛 小貫 | 破砕機用補助装置 |
| JP2010173053A (ja) * | 2009-02-02 | 2010-08-12 | Hitachi Koki Co Ltd | 電動穿孔工具 |
| CN205915531U (zh) * | 2016-08-28 | 2017-02-01 | 赵夫超 | 一种小型无尘瓷砖切割机 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019111642A (ja) * | 2018-11-22 | 2019-07-11 | 株式会社神名テックス | 掘削装置及び掘削方法 |
| JP7231194B2 (ja) | 2018-11-22 | 2023-03-01 | 株式会社神名テックス | 掘削装置及び掘削方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019107754A (ja) | 2019-07-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6442036B1 (ja) | 掘削装置及び掘削方法 | |
| JP6380560B2 (ja) | 打撃工具 | |
| US9553542B2 (en) | Power tool | |
| US9457462B2 (en) | Power tool having a speed selector switch | |
| CN101733735B (zh) | 手持式工具机装置 | |
| EP2085755A1 (en) | Power Tool having Motor Speed Monitor | |
| JP7231194B2 (ja) | 掘削装置及び掘削方法 | |
| CN105689815A (zh) | 电动工具以及控制器 | |
| JP4742613B2 (ja) | ドリル工具 | |
| JP2022168014A (ja) | 動力工具 | |
| JP2007229888A (ja) | ハンドドリル装置 | |
| CN109563694A (zh) | 摆动的闭环控制 | |
| CN105940183B (zh) | 钻机以及自动油门控制方法 | |
| JPWO2016121459A1 (ja) | 打撃工具 | |
| JP2014213295A (ja) | 高圧洗浄機 | |
| US20090148806A1 (en) | Control Device for the Drive of a Dental Handpiece | |
| JP2017205014A (ja) | 電動機械器具 | |
| JP2015009361A (ja) | 手持工作機械 | |
| US20160107302A1 (en) | Charging system for hydraulic hammer | |
| US9347305B2 (en) | Method and system for controlling a power source at a rock drilling apparatus and rock drilling apparatus | |
| JP2023140521A (ja) | 液圧回転機械および液圧ポンプ | |
| JP2005344776A (ja) | 建設機械のシリンダ駆動装置 | |
| CN112392088A (zh) | 一种破碎锤控制方法和装置 | |
| CN105269532A (zh) | 手持式工具机能量转换器 | |
| JP2018123733A (ja) | 電動油圧ポンプ及び安定化埋込材の載荷試験装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180125 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180726 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20180813 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180821 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181019 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181106 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181122 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6442036 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |