JP5454880B2 - 物品搬送設備 - Google Patents
物品搬送設備 Download PDFInfo
- Publication number
- JP5454880B2 JP5454880B2 JP2009190408A JP2009190408A JP5454880B2 JP 5454880 B2 JP5454880 B2 JP 5454880B2 JP 2009190408 A JP2009190408 A JP 2009190408A JP 2009190408 A JP2009190408 A JP 2009190408A JP 5454880 B2 JP5454880 B2 JP 5454880B2
- Authority
- JP
- Japan
- Prior art keywords
- article
- longitudinal direction
- closing
- opening
- closed position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000002265 prevention Effects 0.000 claims description 59
- 230000032258 transport Effects 0.000 claims description 28
- 238000003780 insertion Methods 0.000 claims description 11
- 230000037431 insertion Effects 0.000 claims description 11
- 238000000638 solvent extraction Methods 0.000 claims description 2
- 238000012544 monitoring process Methods 0.000 description 51
- 238000005192 partition Methods 0.000 description 17
- 230000033001 locomotion Effects 0.000 description 11
- 238000001514 detection method Methods 0.000 description 4
- 238000009434 installation Methods 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 2
- 240000006829 Ficus sundaica Species 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000009545 invasion Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 238000009420 retrofitting Methods 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
Images






Landscapes
- Warehouses Or Storage Devices (AREA)
Description
そして、このような物品搬送設備の従来例として、閉鎖体が上下方向に移動自在に構成され、閉鎖体を移動操作する移動操作手段が閉鎖体の上端部を吊り下げ支持しており、移動操作手段が門型の支持用枠体に支持されているものがある(例えば、特許文献1参照。)。
また、門型の支持用枠体を荷受台と走行経路を走行する物品搬送体との間に設けるために、物品搬送体と荷受台との間に支持用枠体が介在することになり、その分だけ走行経路の横幅方向で荷受台は走行経路から離れた位置に設置されていた。これにより、物品搬送体にフォーク式の移載装置を設けた場合ではその移載装置のフォークリーチを長くする必要があり、耐荷重性を確保するために移載装置の剛性を高くしなければならず、この点でもコスト高となっていた。特に、門型の支持用枠体は、移動操作手段及びこれにて吊り下げ支持される閉鎖体を支持可能に強固に構成するために支持用枠体を構成する枠部材が太くなる場合があり、このように枠部材が太い支持用枠体を物品搬送体と荷受台との間に設けた場合は、走行経路の横幅方向に荷受台を走行経路から大きく離して設けなければならない。
前記閉鎖体が、前記走行経路の長手方向に沿って移動自在に構成され、前記移動操作手段が、前記閉鎖体の下端部を支持して前記閉鎖体を前記閉鎖位置と前記開放位置とに移動操作するべく床面上に設けられ、
前記荷受台が、前記走行経路の長手方向に沿って間隔を隔てた状態で一対並設され、前記侵入防止体が、前記物品出し入れ口を前記一対の荷受台の夫々に対応して前記走行経路の長手方向に間隔を隔てた状態で一対備えて構成され、前記一対の物品出し入れ口のうちの前記長手方向の一方側の前記物品出し入れ口に対して設けられた閉鎖体が、前記物品出し入れ口の全体を閉じる全閉鎖位置とこの全閉鎖位置より前記長手方向の一方側の全開放位置とに移動自在な1枚の板状体にて片開き式に構成され、前記一対の物品出し入れ口のうちの前記長手方向の他方側の物品出し入れ口に対して設けられた閉鎖体が、当該物品出し入れ口における前記長手方向の一方側の部分を閉じる部分閉鎖位置とこの部分閉鎖位置より前記長手方向で一方側に位置する部分開放位置とに移動自在な一方側板状体、及び、当該物品出し入れ口における前記長手方向の他方側の部分を閉じる部分閉鎖位置とこの部分閉鎖位置より前記長手方向で他方側に位置する部分開放位置とに移動自在な他方側板状体の2枚の板状体にて両開き式に構成されている点にある。
従って、閉鎖体の設置コストを抑えることができながら閉鎖体を設置しても荷受台を物品搬送体の近くに設置できる物品搬送設備を提供することができるに至った。
また、板状体を横幅方向の一方側に移動させて一方側の物品出し入れ口を開放し、一方側板状体を横幅方向の一方側に移動させ且つ他方側板状体を横幅方向の他方側に移動させて他方側の物品出し入れ口を開放する。つまり、一対の物品出し入れ口を開放する場合は、板状体を、他方側の物品出し入れ口が位置しない一方側に移動させ、他方側板状体を、一方側の物品出し入れ口が位置しない他方側に移動させるため、一方側の物品出し入れ口と他方側の物品出し入れ口との間に移動させるのは一方側板状体のみである。よって、一対の物品出し入れ口の双方を開放させたとしても板状体同士が重ならないため、一方側の物品出し入れ口を閉鎖する閉鎖体と他方側の物品出し入れ口を閉鎖する閉鎖体とを厚み方向にずらして設ける必要がなく、走行経路の横幅方向での厚みを薄くすることができる。
そして、他方側の物品出し入れ口は、一方側板状体と他方側板状体とで閉鎖しているため、一枚の板状体にて物品出し入れ口の全体を閉鎖した場合に比べて短時間で物品出し入れ口を開閉することができる。
図1に示すように、物品搬送設備には、直線状に設定された走行経路Sに沿って走行して物品を搬送する物品搬送体としてのスタッカークレーン1と、物品収納用の収納部2aが縦横に並設された物品収納棚2と、ピッキング作業を行う物品を載置支持するための複数の固定台3と、固定台3の物品に対してピッキング作業を行う作業装置としてのピッキング装置4と、物品搬出入用の搬出入用台車5とが設けられている。
図1に示すように、侵入防止体14は、監視領域Eと走行経路Sとを仕切る部分に、スタッカークレーン1と固定台3との間で物品を移載するための物品出し入れ口15が備えられている。侵入防止体14における監視領域Eと走行経路Sとを仕切る部分は、走行経路Sの長手方向に沿って設置されており、物品出し入れ口15は走行経路Sの横幅方向に向けて開口している。そして、侵入防止体14の物品出し入れ口15に入り込む状態で固定台3が設けられている。ちなみに、物品出し入れ口15は、物品収納棚2の収納部2aや搬出入用台車5に対しては設けられておらず、複数の荷受台Dの一部である固定台3に対してのみ設けられている。
図2及び図3に示すように、侵入防止用開閉扉16は、物品出し入れ口15を閉鎖する閉鎖位置(図4(b)参照)と物品出し入れ口15を開放する開放位置(図4(a)参照)とに走行経路Sの長手方向に沿って移動自在な閉鎖体としての扉本体23と、扉本体23を閉鎖位置と開放位置とに移動操作する移動操作手段24とを備えて、移動操作手段24にて扉本体23がスライド操作されるスライド式の扉に構成されている。この侵入防止用開閉扉16は、侵入防止体14の走行経路S側に隣接して位置しており、走行経路Sに設置されている。
そして、これら一対の物品出し入れ口15のうちの走行経路Sの長手方向の一方側(物品収納棚2が位置する側)の物品出し入れ口15に対して設けられた侵入防止用開閉扉16の扉本体23が片開き式に構成され、走行経路の長手方向の他方側(物品収納棚2が位置する側とは反対側)の物品出し入れ口15に対して設けられた侵入防止用開閉扉16の扉本体23が両開き式に構成されている。
図1に示すように、仕切り体17は、非監視領域Nと監視領域Eとを仕切るように監視領域Eの周囲に部分的に設置されている。つまり、監視領域Eの周囲における走行経路Sと隣接する箇所には仕切り体17が設置されておらず、平面視で矩形状の監視領域Eに対してコ字状の仕切り体17が設置されている。そして、物品出し入れ口15から離れた箇所から監視領域Eに進入するように、仕切り体17における走行経路Sから離れる側の端部に作業者出入口18が形成されている。
進入用開閉扉19は、作業者の操作にて作業者出入口18を閉鎖する閉鎖位置(図4(a)参照)と作業者出入口18を開放する開放位置(図4(b)参照)とに揺動操作可能に構成されており、作業者にて揺動操作される揺動式の扉に構成されている。
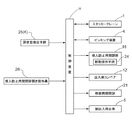
図6に示すように、制御手段Hは、固定台3に載置された物品に対してピッキング装置4がピッキング作業を行う間は侵入防止用開閉扉16を閉鎖状態とし、固定台3に載置された物品に対してピッキング装置4がピッキング作業を行わない間は侵入防止用開閉扉16を開放状態とするように、侵入防止用開閉扉16の開閉作動を制御するように構成されている。
つまり、固定台3に載置された物品に対してピッキング装置4にてピッキング作業を行う場合は、その固定台3に対して設けられている侵入防止用開閉扉16(具体的には、例えば、図1における左側の監視領域Eの左側に設置された固定台3であれば、左側の監視領域Eの左側の物品出し入れ口15を閉鎖する侵入防止用開閉扉16)を閉鎖状態として、ピッキング作業中に物品や品物が走行経路Sに落下することを侵入防止用開閉扉16で防止し、固定台3に載置された物品に対してピッキング装置4にてピッキング作業を行わない場合は、その固定台3に対して設けられている侵入防止用開閉扉16を開放状態として、スタッカークレーン1による物品収納棚2と固定台3との間での物品の搬送を可能とするようになっている。
ちなみに、このピッキング作業に基づく侵入防止用開閉扉16の開放状態から閉鎖状態への切り換えは、対応して設けられた固定台3に対するピッキング作業が開始するに伴って行われ、侵入防止用開閉扉16の閉鎖状態から開放状態への切り換えは、対応して設けられた固定台3に対するピッキング作業が終了するに伴って行われる。
つまり、作業者がピッキング装置4のメンテナンス作業等のために非監視領域Nから監視領域Eに進入した場合は、その作業者が進入した監視領域Eに対して設けられている侵入防止用開閉扉16(具体的には、例えば、図1における左側の監視領域Eであれば、左側の監視領域Eの一対の物品出し入れ口15を閉鎖する一対の侵入防止用開閉扉16)を閉鎖状態として、作業者が物品出し入れ口15を通って走行経路Sに侵入することを防止し、ピッキング装置4のメンテナンス作業等を終えた作業者が監視領域Eから非監視領域Nに退出した場合は、進入用開閉扉19を閉鎖状態とし且つ進入防止用開閉扉開き操作具26を操作し、その作業者が退出した監視領域Eに対して設けられている侵入防止用開閉扉16を開放状態として、スタッカークレーン1による物品収納棚2と固定台3との間での物品の搬送を可能とするようになっている。
また、上位コントローラからのピッキング指令に基づいて、収納棚2bと侵入防止用開閉扉16が開放状態の固定台3との間で物品を搬送するピッキング用搬送制御を実行するべく、スタッカークレーン1の作動を制御するように構成されている。つまり、ピッキング用搬送制御では、複数の固定台3のうち、載置された物品に対してピッキング装置4にてピッキング作業が行われている固定台3に対するスタッカークレーン1による物品の移載を禁止し且つピッキング対象の当該固定台3以外の固定台3に対するスタッカークレーン1による物品の移載を許容するように、スタッカークレーン1の作動を制御するように構成されている。
(1) 上記実施形態では、移動操作手段24を、扉本体23が移動操作手段24の横幅内に収まるように閉鎖体23を載置支持するように構成したが、図7に示すように、移動操作手段24を、移動体24aにおける走行経路の横幅方向での外方側の部分にて閉鎖体23を支持して、閉鎖体23を横幅方向の外方側に突出する片持ち状態で支持するように構成してもよい。このように移動操作手段24にて閉鎖体23を支持することにより、荷受台Dを閉鎖体23により近づけた状態で設置することができる。
14 侵入防止体
15 物品出し入れ口
23 閉鎖体
23a 板状体
23b 一方側板状体
23c 他方側板状体
24 移動操作手段
D 荷受台
S 走行経路
Claims (3)
- 走行経路に沿って走行して複数の荷受台の間で物品を搬送する物品搬送体と、
前記走行経路とその外部とを仕切る状態で設置され、且つ、前記物品搬送体にて前記荷受台との間で物品を移載するための物品出し入れ口を備えた侵入防止体と、
前記物品出し入れ口を閉鎖する閉鎖位置と前記物品出し入れ口を開放する開放位置とに移動自在な閉鎖体と、
前記閉鎖体を前記閉鎖位置と前記開放位置とに移動操作する移動操作手段とを備えて構成されている物品搬送設備であって、
前記閉鎖体が、前記走行経路の長手方向に沿って移動自在に構成され、
前記移動操作手段が、前記閉鎖体の下端部を支持して前記閉鎖体を前記閉鎖位置と前記開放位置とに移動操作するべく床面上に設けられ、
前記荷受台が、前記走行経路の長手方向に沿って間隔を隔てた状態で一対並設され、
前記侵入防止体が、前記物品出し入れ口を前記一対の荷受台の夫々に対応して前記走行経路の長手方向に間隔を隔てた状態で一対備えて構成され、
前記一対の物品出し入れ口のうちの前記長手方向の一方側の前記物品出し入れ口に対して設けられた閉鎖体が、前記物品出し入れ口の全体を閉じる全閉鎖位置とこの全閉鎖位置より前記長手方向の一方側の全開放位置とに移動自在な1枚の板状体にて片開き式に構成
され、
前記一対の物品出し入れ口のうちの前記長手方向の他方側の物品出し入れ口に対して設けられた閉鎖体が、当該物品出し入れ口における前記長手方向の一方側の部分を閉じる部分閉鎖位置とこの部分閉鎖位置より前記長手方向で一方側に位置する部分開放位置とに移動自在な一方側板状体、及び、当該物品出し入れ口における前記長手方向の他方側の部分を閉じる部分閉鎖位置とこの部分閉鎖位置より前記長手方向で他方側に位置する部分開放位置とに移動自在な他方側板状体の2枚の板状体にて両開き式に構成されている物品搬送設備。 - 前記移動操作手段が、前記閉鎖体を載置支持するように構成されている請求項1記載の物品搬送設備。
- 前記移動操作手段が、前記走行経路の長手方向に沿って設けられたエアー式のロッドレスシリンダにて構成されている請求項1又は2記載の物品搬送設備。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009190408A JP5454880B2 (ja) | 2009-08-19 | 2009-08-19 | 物品搬送設備 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009190408A JP5454880B2 (ja) | 2009-08-19 | 2009-08-19 | 物品搬送設備 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011042437A JP2011042437A (ja) | 2011-03-03 |
| JP5454880B2 true JP5454880B2 (ja) | 2014-03-26 |
Family
ID=43830174
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009190408A Active JP5454880B2 (ja) | 2009-08-19 | 2009-08-19 | 物品搬送設備 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5454880B2 (ja) |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4827432B1 (ja) * | 1967-05-02 | 1973-08-22 | ||
| JPH0234683U (ja) * | 1988-08-29 | 1990-03-06 | ||
| JP4451544B2 (ja) * | 2000-06-06 | 2010-04-14 | 平田機工株式会社 | 扉開閉装置 |
| JP2009120382A (ja) * | 2007-11-19 | 2009-06-04 | Murata Mach Ltd | 搬送システム |
-
2009
- 2009-08-19 JP JP2009190408A patent/JP5454880B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011042437A (ja) | 2011-03-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110891882B (zh) | 运送车以及运送设备 | |
| KR102276842B1 (ko) | 층간 반송 설비 | |
| KR101329120B1 (ko) | 자동 창고 | |
| KR102409577B1 (ko) | 물품 반송 설비 | |
| JP6304045B2 (ja) | 物品保管設備 | |
| KR20190040086A (ko) | 고층 입체 창고에서 컨테이너의 입고 및 출고 또는 이동 방법 및 그 장치 | |
| JP4123383B2 (ja) | 天井走行車システム | |
| RU2007130147A (ru) | Автоматический парковочный гараж | |
| JP7568514B2 (ja) | 遠隔操作車両をロックするためのロックデバイスを備えた容器アクセスステーションを備えた格納グリッド | |
| US12071304B2 (en) | Automated shuttle systems for multi-depth storage racks | |
| TWI408092B (zh) | Processing equipment | |
| JP5447937B2 (ja) | 物品搬送設備 | |
| TW201808752A (zh) | 具有用於將倉儲貨物儲存及出倉或轉倉而設置的儲存及出倉單元的高架儲存設備 | |
| JPS63242809A (ja) | 物品収納庫 | |
| KR101398929B1 (ko) | 반송차 시스템 | |
| KR102500718B1 (ko) | 물품 보관 설비 | |
| JP5454880B2 (ja) | 物品搬送設備 | |
| JP5656053B2 (ja) | 装置搬入方法 | |
| WO2012001973A1 (ja) | 処理設備 | |
| JP3568014B2 (ja) | 物品保管設備 | |
| JP6809612B2 (ja) | 自動倉庫システム、及び自動倉庫システムの制御方法 | |
| JP2015009952A (ja) | 自動倉庫及びその運転方法 | |
| JP5467764B2 (ja) | 処理設備 | |
| KR20180047234A (ko) | 전자파 흡수체 유닛의 보관 장치 | |
| JP5490398B2 (ja) | 処理設備 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130410 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130418 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130614 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130919 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131225 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5454880 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |