JP4772815B2 - Correction pattern image generation apparatus, pattern inspection apparatus, and correction pattern image generation method - Google Patents
Correction pattern image generation apparatus, pattern inspection apparatus, and correction pattern image generation method Download PDFInfo
- Publication number
- JP4772815B2 JP4772815B2 JP2008071959A JP2008071959A JP4772815B2 JP 4772815 B2 JP4772815 B2 JP 4772815B2 JP 2008071959 A JP2008071959 A JP 2008071959A JP 2008071959 A JP2008071959 A JP 2008071959A JP 4772815 B2 JP4772815 B2 JP 4772815B2
- Authority
- JP
- Japan
- Prior art keywords
- pattern image
- inspection
- linear prediction
- correction
- prediction model
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Preparing Plates And Mask In Photomechanical Process (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Description
本発明は、補正パターン画像生成装置、パターン検査装置および補正パターン画像生成方法に関し、例えば、半導体リソグラフィ用マスクの欠陥検査に適用される補正パターン画像生成装置、パターン検査装置および補正パターン画像生成方法に関する。 The present invention relates to a correction pattern image generation device, a pattern inspection device, and a correction pattern image generation method. For example, the present invention relates to a correction pattern image generation device, a pattern inspection device, and a correction pattern image generation method applied to defect inspection of a semiconductor lithography mask. .
近年、大規模集積回路(LSI)の高集積化及び大容量化に伴い、半導体素子に要求される回路線幅はますます狭くなってきている。これらの半導体素子は、回路パターンが形成された原画パターン(マスク或いはレチクルともいう。以下、マスクと総称する)を用いて、いわゆるステッパと呼ばれる縮小投影露光装置でウェハ上にパターンを露光転写して回路形成することにより製造される。 In recent years, the circuit line width required for a semiconductor element has been increasingly narrowed as a large scale integrated circuit (LSI) is highly integrated and has a large capacity. These semiconductor elements use an original pattern pattern (also referred to as a mask or a reticle, hereinafter referred to as a mask) on which a circuit pattern is formed, and the pattern is exposed and transferred onto a wafer by a reduction projection exposure apparatus called a stepper. It is manufactured by forming a circuit.
そして、多大な製造コストのかかるLSIの製造にとって、歩留まりの向上は欠かせない。歩留まりを低下させる大きな要因の一つとして、半導体ウェハ上に超微細パターンを露光、転写する際に使用されるマスクのパターン欠陥があげられる。近年、半導体ウェハ上に形成されるLSIパターン寸法の微細化に伴って、パターン欠陥として検出しなければならない寸法も極めて小さいものとなっている。そのため、LSI製造に使用される転写用マスクの欠陥を検査するパターン検査装置の高精度化が必要とされている。 In addition, improvement in yield is indispensable for manufacturing an LSI that requires a large amount of manufacturing cost. One of the major factors that reduce the yield is a pattern defect of a mask used when an ultrafine pattern is exposed and transferred onto a semiconductor wafer. In recent years, with the miniaturization of LSI pattern dimensions formed on semiconductor wafers, the dimensions that must be detected as pattern defects have become extremely small. Therefore, it is necessary to improve the accuracy of a pattern inspection apparatus that inspects defects in a transfer mask used in LSI manufacturing.
パターン欠陥を検査する方法には、大きく分けて、ダイとダイとの比較(Die to Die比較:DD比較)検査と、ダイとデータベースとの比較(Die to Database比較:DB比較)検査がある。DD比較検査は、レチクル上の2つのダイの測定データ(検査基準パターン画像のデータと被検査パターン画像のデータ)を比較して欠陥を検出する方法である。また、DB比較検査は、ダイの測定データ(被検査パターン画像のデータ)とLSI設計用CADデータから発生させたダイの設計データ(検査基準パターン画像のデータ)を比較して欠陥を検出する方法である。 Methods for inspecting pattern defects are roughly classified into die-to-die comparison (Die to Die comparison: DD comparison) inspection and die-to-database comparison (Die to Database comparison: DB comparison) inspection. The DD comparison inspection is a method for detecting a defect by comparing measurement data (inspection reference pattern image data and inspection pattern image data) of two dies on a reticle. The DB comparison inspection is a method for detecting defects by comparing die measurement data (inspected pattern image data) and die design data (inspection reference pattern image data) generated from LSI design CAD data. It is.
DB比較検査では、試料はパターン検査装置のステージ上に載置され、ステージが動くことによって光束が試料上を走査し、検査が行われる。試料には、光源及び照明光学系によって光束が照射される。試料を透過あるいは反射した光は光学系を介して、センサ上に結像される。センサで撮像された画像は測定データとして比較回路へ送られる。比較回路では、画像同士の位置合わせの後、測定データと設計データとを適切なアルゴリズムに従って比較し、一致しない場合には、パターン欠陥有りと判定する。 In the DB comparison inspection, the sample is placed on the stage of the pattern inspection apparatus, and the stage is moved so that the light beam scans on the sample and the inspection is performed. The sample is irradiated with a light beam by a light source and an illumination optical system. The light transmitted or reflected by the sample is imaged on the sensor via the optical system. The image picked up by the sensor is sent to the comparison circuit as measurement data. The comparison circuit compares the measured data and the design data after aligning the images according to an appropriate algorithm, and determines that there is a pattern defect if they do not match.
ここで、近年、リソグラフィ用マスク上のパターンの微細化に伴い、比較対象画像同士の画像位置ずれや画像の伸縮、うねり、センシングノイズなどに埋もれるような微小な欠陥を検出する必要が生じている。そのために、検査基準パターン画像と被検査パターン画像との高精度な位置合わせが必要となる。さらに、これらの欠陥を検出するためにも画像補正が重要となる。このため、従来、検査基準パターン画像と被検査パターン画像の2つの画像を比較検査する前段では、両画像のアライメントを行った後、画像の伸縮の補正(例えば、特許文献1参照)や画像のうねり補正、リサイズ補正、ノイズ平均化処理などの画像補正を順に行っていた。 Here, in recent years, with the miniaturization of the pattern on the lithography mask, it has become necessary to detect minute defects that are buried in the image misalignment of images to be compared, image expansion / contraction, undulation, sensing noise, and the like. . Therefore, it is necessary to align the inspection reference pattern image and the inspection pattern image with high accuracy. Furthermore, image correction is important for detecting these defects. For this reason, conventionally, in the first stage of comparing and inspecting two images of the inspection reference pattern image and the pattern image to be inspected, after the alignment of both images, the correction of the expansion / contraction of the image (for example, see Patent Document 1) and the image Image correction such as swell correction, resizing correction, and noise averaging processing was sequentially performed.
しかしながら、このような補正を繰り返すことは累積誤差を生じさせ、画像が劣化する大きな要因になっている。さらに、補正しすぎて検査基準パターン画像と被検査パターン画像とが近似しすぎると今度は欠陥の検出が困難になってしまう。すなわち、過剰な補正は逆効果になってしまう。 However, repeating such corrections causes a cumulative error, which is a major factor for image deterioration. Furthermore, if the inspection reference pattern image and the pattern image to be inspected are too close to each other after correction, it becomes difficult to detect the defect. That is, excessive correction is counterproductive.
また、特許文献2には、サブ画素レベルからの最終的な微調整のアライメントと画像補正を統合化し、画像劣化が少なく、効果的な画像補正である入出力予測モデルを用いた画像補正について開示されている。この画像補正は、例えば、検査基準パターン画像を入力データ、被検査パターン画像を出力データとして線形予測モデルを用いて、サブ画素単位のアライメントと画像補正を同時に実現するものである。この場合、画像データから行列の関係式を作り、連立方程式を解くことによってモデルパラメータ(係数)を同定する。そして同定されたモデルパラメータを適用した線形予測モデルに基づいて検査基準パターン画像を補正し補正パターン画像を生成する。
本発明は、上述した問題点を克服し、検査対象試料の被検査パターン画像を適切に検査するために、検査基準パターンの画像を適切に補正した補正パターン画像を生成する装置及びその方法を提供することを目的とする。 The present invention provides an apparatus and a method for generating a correction pattern image in which an image of an inspection reference pattern is appropriately corrected in order to overcome the above-described problems and appropriately inspect an inspection pattern image of a sample to be inspected. The purpose is to do.
本発明の一態様の補正パターン画像生成装置は、試料のパターン検査に用いる検査基準パターン画像の補正を行う補正パターン画像生成装置であって、被検査パターン画像と前記検査基準パターン画像の位置合わせを行い、サブ画素単位の相対シフト量を算出する相対シフト量算出部と、前記検査基準パターン画像を、前記相対シフト量に基づいて垂直または水平方向のいずれか一方のシフト方向にシフトする画像シフト部と、前記被検査パターン画像およびシフトした前記検査基準パターン画像に対して、第1の線形予測モデルを用いた入出力関係を記述する第1の連立方程式を生成する第1の方程式生成部と、前記第1の連立方程式のパラメータを求める第1のパラメータ推定部と、前記第1の連立方程式のパラメータが代入された前記第1の線形予測モデルを用いて、前記検査基準パターン画像を、前記シフト方向に対し垂直な方向に補正した第1の補正パターン画像を生成する第1の補正パターン画像生成部と、前記被検査パターン画像および前記第1の補正パターン画像に対して、第2の線形予測モデルを用いた入出力関係を記述する第2の連立方程式を生成する第2の方程式生成部と、前記第2の連立方程式のパラメータを求める第2のパラメータ推定部と、前記第2の連立方程式のパラメータが代入された前記第2の線形予測モデルを用いて、前記第1の補正パターン画像を、前記シフト方向と同一の方向に補正した第2の補正パターン画像を生成する第2の補正パターン画像生成部と、を備え、前記第1の線形予測モデルが1×n(nは3以上の整数)画素の領域を入力とする1×n次のモデルであり、かつ、前記第2の線形予測モデルがn×1画素の領域を入力とするn×1次のモデルであること、または、前記第1の線形予測モデルがn×1画素の領域を入力とするn×1次のモデルであり、かつ、前記第2の線形予測モデルが1×n画素の領域を入力とする1×n次のモデルであることを特徴とする。
A correction pattern image generation device according to one aspect of the present invention is a correction pattern image generation device that corrects an inspection reference pattern image used for pattern inspection of a sample, and aligns an inspection pattern image with the inspection reference pattern image. A relative shift amount calculation unit that calculates a relative shift amount in units of subpixels, and an image shift unit that shifts the inspection reference pattern image in one of the vertical and horizontal shift directions based on the relative shift amount. And a first equation generation unit that generates a first simultaneous equation describing an input / output relationship using a first linear prediction model for the inspection pattern image and the shifted inspection reference pattern image, A first parameter estimating unit for obtaining a parameter of the first simultaneous equation, and the parameter of the first simultaneous equation being substituted A first correction pattern image generation unit that generates a first correction pattern image obtained by correcting the inspection reference pattern image in a direction perpendicular to the shift direction using a linear prediction model of 1; A second equation generation unit that generates a second simultaneous equation describing an input / output relationship using a second linear prediction model for the image and the first correction pattern image; and the second simultaneous equation The first correction pattern image is the same as the shift direction by using a second parameter estimation unit for obtaining the parameters of the second linear prediction model in which the parameters of the second simultaneous equations are substituted. A second correction pattern image generation unit that generates a second correction pattern image corrected in the direction , wherein the first linear prediction model has an area of 1 × n (n is an integer of 3 or more) pixels. The input is a 1 × n-order model, and the second linear prediction model is an n × first-order model having an input of an n × 1 pixel area, or the first linear prediction model is n × 1-order model that receives the region of the n × 1 pixel, and said second linear prediction model Ru Ah at 1 × n following model that receives the region of 1 × n pixels It is characterized by that.
本発明の一態様のパターン検査装置は、上記補正パターン画像生成装置を有することを特徴とする。 A pattern inspection apparatus according to an aspect of the present invention includes the correction pattern image generation apparatus.
本発明の一態様の補正パターン画像生成方法は、試料のパターン検査に用いる検査基準パターン画像の補正を行う補正パターン画像生成方法であって、被検査パターン画像と前記検査基準パターン画像の位置合わせを行い、サブ画素単位の相対シフト量を算出する相対シフト量算出ステップと、前記検査基準パターン画像を、前記相対シフト量に基づいて垂直または水平方向のいずれか一方のシフトする画像シフトステップと、前記被検査パターン画像およびシフトした前記検査基準パターン画像に対して、第1の線形予測モデルを用いた入出力関係を記述する第1の連立方程式を生成する第1の方程式生成ステップと、前記第1の連立方程式のパラメータを求める第1のパラメータ推定ステップと、前記第1の連立方程式のパラメータが代入された前記第1の線形予測モデルを用いて、前記検査基準パターン画像を、前記シフト方向に対し垂直な方向に補正した第1の補正パターン画像を生成する第1の補正パターン画像生成ステップと、前記被検査パターン画像および前記第1の補正パターン画像に対して、第2の線形予測モデルを用いた入出力関係を記述する第2の連立方程式を生成する第2の方程式生成ステップと、前記第2の連立方程式のパラメータを求める第2のパラメータ推定ステップと、前記第2の連立方程式のパラメータが代入された前記第2の線形予測モデルを用いて、前記第1の補正パターン画像を、前記シフト方向と同一の方向に補正した第2の補正パターン画像を生成する第2の補正パターン画像生成ステップと、を備え、前記第1の線形予測モデルが1×n(nは3以上の整数)画素の領域を入力とする1×n次のモデルであり、かつ、前記第2の線形予測モデルがn×1画素の領域を入力とするn×1次のモデルであること、または、前記第1の線形予測モデルがn×1画素の領域を入力とするn×1次のモデルであり、かつ、前記第2の線形予測モデルが1×n画素の領域を入力とする1×n次のモデルであることを特徴とする。
A correction pattern image generation method according to an aspect of the present invention is a correction pattern image generation method for correcting an inspection reference pattern image used for pattern inspection of a sample, and aligns an inspection pattern image and the inspection reference pattern image. Performing a relative shift amount calculating step for calculating a relative shift amount in units of sub-pixels, an image shift step for shifting the inspection reference pattern image in either the vertical or horizontal direction based on the relative shift amount, and A first equation generating step for generating a first simultaneous equation describing an input / output relationship using a first linear prediction model for the pattern image to be inspected and the shifted inspection reference pattern image; A first parameter estimating step for obtaining parameters of the simultaneous equations, and a parameter of the first simultaneous equations A first correction pattern image generation step of generating a first correction pattern image obtained by correcting the inspection reference pattern image in a direction perpendicular to the shift direction using the first linear prediction model, A second equation generating step for generating a second simultaneous equation describing an input / output relationship using a second linear prediction model for the inspection pattern image and the first correction pattern image; A second parameter estimation step for obtaining parameters of two simultaneous equations, and the second linear prediction model in which the parameters of the second simultaneous equations are substituted, and the first correction pattern image is shifted by the shift includes a second correction pattern image generating step of generating a second correction pattern image corrected in the same direction as the direction, the said first linear prediction model A 1 × n-order model that receives a region of × n (n is an integer of 3 or more) pixels, and the second linear prediction model is an n × first-order that has a region of n × 1 pixels as an input. Or the first linear prediction model is an n × 1 order model with an input of an n × 1 pixel region, and the second linear prediction model is 1 × n pixels. characterized Oh Rukoto at 1 × n following model which receives the area.
ここで、前記第1の線形予測モデルが1×n(nは3以上の整数)画素の領域を入力とする1×n次のモデルであり、かつ、前記第2の線形予測モデルがn×1画素の領域を入力とするn×1次のモデルであること、または、前記第1の線形予測モデルがn×1画素の領域を入力とするn×1次のモデルであり、かつ、前記第2の線形予測モデルが1×n画素の領域を入力とする1×n次のモデルであることが望ましい。 Here, the first linear prediction model is a 1 × n-order model that receives an area of 1 × n (n is an integer of 3 or more) pixels, and the second linear prediction model is n ×. The first linear prediction model is an n × first order model with an input of an n × 1 pixel area, and It is desirable that the second linear prediction model is a 1 × n-order model with a 1 × n pixel region as an input.
本発明によれば、検査対象試料の被検査パターン画像を適切に検査するために、検査基準パターンの画像を適切に補正した補正画像を生成する装置及びその方法を提供することが可能となる。 ADVANTAGE OF THE INVENTION According to this invention, in order to test | inspect suitably the to-be-inspected pattern image of a test object sample, it becomes possible to provide the apparatus and its method which produce | generate the correction | amendment image which corrected the image of the test | inspection reference pattern appropriately.
先に特許文献2を例に説明した補正パターン画像の生成方法においても、例えば、斜線パターン等については、パターンシフトの方向が不定となることに起因して、適切な補正が行えない事態が生じうる。また、斜線パターン等においては補正の適否の判定も困難である。このような場合、適切な補正が施されない検査基準パターン画像を用いることで、検査対象試料の検査精度の低下を招く。 Even in the correction pattern image generation method described above with reference to Patent Document 2, for example, with respect to a hatched pattern or the like, there is a situation in which appropriate correction cannot be performed due to an indefinite pattern shift direction. sell. In addition, it is difficult to determine whether correction is appropriate for a hatched pattern or the like. In such a case, the use of an inspection reference pattern image that is not appropriately corrected causes a decrease in the inspection accuracy of the inspection target sample.
そこで、以下の実施の形態では、リソグラフィ用マスク検査装置などのパターン検査装置における画像補正をする際に、垂直方向と水平方向を別個に補正する。この画像補正によれば、適切な検査基準パターンの補正が実現できる。以下、このように、多様なパターン画像に適応した効果的な画像補正装置、パターン検査装置および画像補正方法について説明する。 Therefore, in the following embodiments, when performing image correction in a pattern inspection apparatus such as a lithography mask inspection apparatus, the vertical direction and the horizontal direction are corrected separately. According to this image correction, an appropriate inspection reference pattern can be corrected. Hereinafter, an effective image correction apparatus, pattern inspection apparatus, and image correction method adapted to various pattern images will be described.
[第1の実施の形態]
図2は、第1の実施の形態のパターン検査装置の構成を示すブロック図である。図2において、パターンが形成された露光用マスクやウェハ等の基板を試料として、かかる試料の欠陥を検査するパターン検査装置100は、光学画像取得部150と制御系回路160を備えている。光学画像取得部150は、XYθテーブル102、光源103、拡大光学系104、フォトダイオードアレイ105、センサ回路106、レーザ測長システム122、オートローダ130、照明光学系170を備えている。制御系回路160では、コンピュータとなる制御計算機110が、データ伝送路となるバス120を介して、位置回路107、比較回路108、展開回路111、参照回路112、オートローダ制御回路113、テーブル制御回路114、磁気ディスク装置109、磁気テープ装置115、フレシキブルディスク装置(FD)116、CRT117、パターンモニタ118、プリンタ119に接続されている。また、XYθテーブル102は、X軸モータ、Y軸モータ、θ軸モータにより駆動される。
[First embodiment]
FIG. 2 is a block diagram illustrating a configuration of the pattern inspection apparatus according to the first embodiment. In FIG. 2, a
図2では、本実施の形態を説明する上で必要な構成部分以外については記載を省略している。パターン検査装置100にとって、通常、必要なその他の構成が含まれることは言うまでもない。
In FIG. 2, description of components other than those necessary for describing the present embodiment is omitted. It goes without saying that the
図1は、図2の比較回路の内部構成を示すブロック図である。図2において、比較回路108は、メモリ142、メモリ144、位置合わせ部140、補正パターン画像生成部200、及び比較部146を有している。
FIG. 1 is a block diagram showing an internal configuration of the comparison circuit of FIG. In FIG. 2, the
メモリ142には、参照回路112から入力される参照データ(検査基準パターン画像データ)が格納される。メモリ144には、センサ回路106から入力した測定データ(被検査パターン画像データ)が格納される。ここで、補正パターン画像生成部200は、補正パターン画像生成装置の一例となる。
The
そして、補正パターン画像生成部200は、相対シフト量算出部202、画像シフト部204、第1の方程式生成部206、第1のパラメータ推定部208、第1の補正パターン画像生成部210、第2の方程式生成部212、第2のパラメータ推定部214、第2の補正パターン画像生成部216を有している。
The correction pattern image generation unit 200 includes a relative shift
図1では、本実施の形態を説明する上で必要な構成部分以外については記載を省略している。位置合わせ部140、補正パターン画像生成部200あるいは比較部146に、その他の構成が含まれても構わない。また、位置合わせ部140、補正パターン画像生成部200、及び比較部146の各機能は、例えば、コンピュータで実行可能なソフトウェアで構成してもよい。但し、これに限るものではない。例えば、電気的な回路によるハードウェアにより実施させても構わない。或いは、電気的な回路によるハードウェアとソフトウェアとの組合せにより実施させても構わない。或いは、かかるハードウェアとファームウェアとの組合せでも構わない。同様に、相対シフト量算出部202、画像シフト部204、第1の方程式生成部206、第1のパラメータ推定部208、第1の補正パターン画像生成部210、第2の方程式生成部212、第2のパラメータ推定部214、第2の補正パターン画像生成部216の各機能は、例えば、コンピュータで実行可能なソフトウェアで構成してもよい。或いは、電気的な回路によるハードウェアにより実施させても構わない。或いは、電気的な回路によるハードウェアとソフトウェアとの組合せにより実施させても構わない。或いは、かかるハードウェアとファームウェアとの組合せでも構わない。
In FIG. 1, description of components other than those necessary for describing the present embodiment is omitted. The
以下、パターン検査装置100の動作について図2を参照しつつ説明する。まず、光学画像取得工程として、光学画像取得部150は、設計データに基づいてパターンが形成された試料となるフォトマスク101の光学画像を取得する。具体的には、光学画像は、以下のように取得される。
Hereinafter, the operation of the
被検査試料となるフォトマスク101は、XYθ各軸のモータによって水平方向及び回転方向に移動可能に設けられたXYθテーブル102上に載置される。そして、フォトマスク101に形成されたパターンには、XYθテーブル102の上方に配置されている適切な光源103によって光が照射される。光源103から照射される光束は、照明光学系170を介してフォトマスク101を照射する。フォトマスク101の下方には、拡大光学系104、フォトダイオードアレイ105及びセンサ回路106が配置されており、フォトマスク101を透過した光は拡大光学系104を介して、フォトダイオードアレイ105に光学像として結像し、入射する。拡大光学系104は、図示しない自動焦点機構により自動的に焦点調整がなされていてもよい。
A photomask 101 to be inspected is placed on an XYθ table 102 provided so as to be movable in a horizontal direction and a rotation direction by motors of XYθ axes. Then, the pattern formed on the photomask 101 is irradiated with light by an appropriate light source 103 disposed above the XYθ table 102. The light beam emitted from the light source 103 irradiates the photomask 101 via the illumination
図3は、光学画像の取得手順を説明するための図である。被検査領域は、図3に示すように、Y方向に向かって、スキャン幅Wの短冊状の複数の検査ストライプに仮想的に分割され、更にその分割された各検査ストライプが連続的に走査されるようにXYθテーブル102(図2)の動作が制御され、X方向に移動しながら光学画像が取得される。 FIG. 3 is a diagram for explaining an optical image acquisition procedure. As shown in FIG. 3, the inspection area is virtually divided into a plurality of strip-shaped inspection stripes having a scan width W in the Y direction, and each of the divided inspection stripes is continuously scanned. Thus, the operation of the XYθ table 102 (FIG. 2) is controlled, and an optical image is acquired while moving in the X direction.
フォトダイオードアレイ105(図2)では、図3に示されるようなスキャン幅Wの画像を連続的に入力する。そして、第1の検査ストライプにおける画像を取得した後、第2の検査ストライプにおける画像を今度は逆方向に移動しながら同様にスキャン幅Wの画像を連続的に入力する。そして、第3の検査ストライプにおける画像を取得する場合には、第2の検査ストライプにおける画像を取得する方向とは逆方向、すなわち、第1の検査ストライプにおける画像を取得した方向に移動しながら画像を取得する。このように、連続的に画像を取得していくことで、無駄な処理時間を短縮することができる。 In the photodiode array 105 (FIG. 2), images having a scan width W as shown in FIG. 3 are continuously input. Then, after acquiring the image of the first inspection stripe, the image of the scan width W is continuously input in the same manner while moving the image of the second inspection stripe in the opposite direction. When an image in the third inspection stripe is acquired, the image moves while moving in the direction opposite to the direction in which the image in the second inspection stripe is acquired, that is, in the direction in which the image in the first inspection stripe is acquired. To get. In this way, it is possible to shorten a useless processing time by continuously acquiring images.
フォトダイオードアレイ105上に結像されたパターンの像は、フォトダイオードアレイ105によって光電変換され、更にセンサ回路106によってA/D(アナログデジタル)変換される。フォトダイオードアレイ105には、例えば、TDI(タイムディレイインテグレータ)センサのようなセンサが設置されている。ステージとなるXYθテーブル102をX軸方向に連続的に移動させることにより、TDIセンサは試料となるフォトマスク101のパターンを撮像する。これらの光源103、拡大光学系104、フォトダイオードアレイ105、センサ回路106により高倍率の検査光学系が構成されている。
The pattern image formed on the
XYθテーブル102は、制御計算機110の制御の下にテーブル制御回路114により駆動される。X方向、Y方向、θ方向に駆動する3軸(X−Y−θ)モータの様な駆動系によって移動可能となっている。これらの、X軸モータ、Y軸モータ、θ軸モータは、例えばステップモータを用いることができる。そして、XYθテーブル102の移動位置はレーザ測長システム122により測定され、位置回路107に供給される。また、XYθテーブル102上のフォトマスク101はオートローダ制御回路113により駆動されるオートローダ130から自動的に搬送され、検査終了後に自動的に排出されるものとなっている。
The XYθ table 102 is driven by the
センサ回路106から出力された測定データ(被検査パターン画像データ:光学画像)は、位置回路107から出力されたXYθテーブル102上におけるフォトマスク101の位置を示すデータとともに比較回路108に送られる。測定データは例えば8ビットの符号なしデータであり、各画素の明るさの階調を表現している。測定データは、例えば、512画素×512画素の画像データ毎に比較される。
Measurement data (pattern image data to be inspected: optical image) output from the
一方、フォトマスク101のパターン形成時に用いた設計データは、記憶装置の一例である磁気ディスク装置109に記憶される。そして、設計データは、磁気ディスク装置109から制御計算機110を通して展開回路111に読み出される。そして、展開回路111は、読み出された被検査試料となるフォトマスク101の設計データを2値ないしは多値のイメージデータに変換して、このイメージデータが参照回路112に送られる。
On the other hand, design data used at the time of pattern formation of the photomask 101 is stored in a
ここで、設計データは長方形や三角形を基本図形としたもので、例えば、図形の2つの頂点位置における座標(x、y)や、長方形や三角形等の図形種を区別する識別子となる図形コードといった情報で各パターン図形の形、大きさ、位置等を定義した図形データが格納されている。かかる図形データとなる設計データが展開回路111に入力されると、図形ごとのデータにまで展開される。そして、その図形データの図形形状を示す図形コード、図形寸法などを解釈する。そして、所定の量子化寸法のグリッドを単位とするマス目内に配置されるパターンとして2値ないしは多値の図形パターンデータに展開される。
Here, the design data is a rectangle or triangle as a basic figure. For example, the coordinates (x, y) at two vertex positions of the figure, or a figure code serving as an identifier for distinguishing the figure type such as a rectangle or a triangle. The graphic data defining the shape, size, position, etc. of each pattern graphic is stored in the information. When design data as such graphic data is input to the
言い換えれば、設計データを読み込み、検査領域を所定の寸法を単位とするマス目として仮想分割してできたマス目毎に設計データにおける図形データが示す図形が占める占有率を演算し、nビットの占有率データが生成され、内部のパターンメモリに出力される。例えば、1つのマス目を1画素として設定すると好適である。そして、1画素に1/28(=1/256)の分解能を持たせるとすると、画素内に配置されている図形の領域分だけ1/256の小領域を割り付けて画素内の占有率を演算する。そして、8ビットの占有率データとして生成され、内部のパターンメモリに格納される。 In other words, the design data is read, and the occupation ratio occupied by the graphic indicated by the graphic data in the design data is calculated for each cell formed by virtually dividing the inspection area as a cell having a predetermined dimension as a unit, and the n-bit Occupancy data is generated and output to the internal pattern memory. For example, it is preferable to set one square as one pixel. If a resolution of 1/2 8 (= 1/256) is given to one pixel, 1/256 small areas are allocated by the figure area arranged in the pixel, and the occupation ratio in the pixel is set. Calculate. Then, it is generated as 8-bit occupancy data and stored in an internal pattern memory.
そして、参照回路112は、展開回路111から送られてきた図形のイメージデータから測定データと比較するための参照データ(検査基準パターン画像データ)を作成する。比較対象となる参照データは、測定データと同様、例えば、512画素×512画素の画像データとして作成される。
Then, the
ここでは、「die to database検査」を行うために設計データに基づいて参照データを作成しているが、これに限るものではない。「die to die検査」を行うこともできる。その場合には、比較対象となる別の測定データ(光学画像)に基づいて参照データを作成すればよい。そして、参照データは、比較回路108に送られる。
Here, reference data is created based on design data in order to perform “die to database inspection”, but the present invention is not limited to this. A “die to die inspection” can also be performed. In that case, reference data may be created based on another measurement data (optical image) to be compared. Then, the reference data is sent to the
比較回路108では、参照データと測定データを取り込む。そして、参照データ(検査基準パターン画像データ)は、図1に示すメモリ142に格納される。また、測定データ(被検査パターン画像データ)は、メモリ144に格納される。そして、位置合わせ部140が、1画素単位でシフトして画素位置ズレを補正しておく。つまり、両画像の位置ズレを1画素未満に追い込んでおく。予め、両画像の対応する各画素の階調差の2乗和などで表される評価関数を最小にする位置に合わせればよい。
The
その後、後に詳述する方法で参照データ(検査基準パターン画像データ)を補正して補正パターン画像を生成した後に、補正パターン画像データと測定データとを所定のアルゴリズムに従って比較し、欠陥の有無を判定する。 After that, after correcting the reference data (inspection standard pattern image data) by a method described in detail later to generate a corrected pattern image, the corrected pattern image data and measurement data are compared according to a predetermined algorithm to determine the presence or absence of defects. To do.
図4は、本実施の形態における補正パターン画像生成方法の要部工程について示すフローチャート図である。図4において、補正パターン画像生成方法は、相対シフト量算出ステップS10、画像シフトステップS12、第1の方程式生成ステップS14、第1のパラメータ推定ステップS16、第1の補正パターン画像生成ステップS18、第2の方程式生成ステップS20、第2のパラメータ推定ステップS22、第2の補正パターン画像生成ステップS24という一連の工程を実施する。そして、その後、検査工程として、第2の補正パターン画像と被検査パターン画像とを比較する比較ステップS26を実施する。 FIG. 4 is a flowchart showing the main steps of the correction pattern image generation method according to the present embodiment. 4, the correction pattern image generation method includes a relative shift amount calculation step S10, an image shift step S12, a first equation generation step S14, a first parameter estimation step S16, a first correction pattern image generation step S18, and a first correction pattern image generation step S18. A series of steps of an equation generation step S20, a second parameter estimation step S22, and a second correction pattern image generation step S24 are performed. After that, as an inspection process, a comparison step S26 for comparing the second correction pattern image with the pattern image to be inspected is performed.
相対シフト量算出ステップS10において、相対シフト量算出部202(図1)は、被検査パターン画像と検査基準パターン画像の位置合わせを行い、被検査パターン画像と検査基準パターン画像のサブ画素単位の相対シフト量を算出する。 In the relative shift amount calculation step S10, the relative shift amount calculation unit 202 (FIG. 1) aligns the inspection pattern image and the inspection reference pattern image, and compares the inspection pattern image and the inspection reference pattern image in units of sub-pixels. The shift amount is calculated.
一般に、サブ画素単位での水平方向のシフト量をl、垂直方向のシフト量をmとすると、画像uをl,mだけシフトした画像u’’は、バイキュービック補間法と呼ばれる以下の式(1−1)と式(1−2)で求めることができる。シフト量の求め方は、例えばシフト量を所定の範囲で振って、シフト後の階調差の二乗和が最小となるシフト量を求める方法などがある。

なお、本実施の形態において、以下、被検査画像をy、検査基準画像をu、検査基準パターン画像を相対シフト量算出ステップS10で求めた相対シフト量に基づいてシフトさせた画像、すなわちシフトさせた検査基準画像をv、第1の補正パターン画像をw、第2の補正パターン画像をxという記号で表すものとする。 In this embodiment, hereinafter, the image to be inspected is y, the inspection reference image is u, and the inspection reference pattern image is shifted based on the relative shift amount obtained in the relative shift amount calculation step S10, that is, the image is shifted. The inspection reference image is represented by v, the first correction pattern image is represented by w, and the second correction pattern image is represented by x.
画像シフトステップS12において、画像シフト部204(図1)は、S10で得られた相対シフト量に基づいて、検査基準パターン画像uを垂直方向にのみシフトさせる。具体的には、式(1−1)と式(1−2)において、l=0とすることにより検査基準パターン画像を垂直方向にのみシフトさせた検査基準パターン画像vを生成する。 In the image shift step S12, the image shift unit 204 (FIG. 1) shifts the inspection reference pattern image u only in the vertical direction based on the relative shift amount obtained in S10. Specifically, the inspection reference pattern image v is generated by shifting the inspection reference pattern image only in the vertical direction by setting l = 0 in the expressions (1-1) and (1-2).
次に、第1の方程式生成ステップS14、第1のパラメータ推定ステップS16、第1の補正パターン画像生成ステップS18の一連のステップで、検査基準パターン画像uを、画像シフトステップS12においてシフトした方向に対し垂直な方向に補正する。この実施の形態においては、画像シフトステップS12で検査基準パターン画像uを垂直方向にシフトしているため、これに垂直な方向、すなわち水平方向の補正を行う。画像シフトステップS12において、サブ画素単位の垂直方向の位置合わせを行った結果、水平方向により精度の高い補正を行うことができる。 Next, in a series of steps of the first equation generation step S14, the first parameter estimation step S16, and the first correction pattern image generation step S18, the inspection reference pattern image u is shifted in the direction shifted in the image shift step S12. Correct the vertical direction. In this embodiment, since the inspection reference pattern image u is shifted in the vertical direction in the image shift step S12, correction in the direction perpendicular to this, that is, in the horizontal direction is performed. In the image shift step S12, as a result of performing the alignment in the vertical direction in units of sub-pixels, it is possible to perform correction with higher accuracy in the horizontal direction.
まず、第1の方程式生成ステップS14において、第1の方程式生成部206は、被検査パターン画像yのデータと対応するシフトされた検査基準パターン画像vのデータとを用いて、第1の線形予測モデルに基づく連立方程式を生成する。以下、シフトした検査基準パターン画像vを入力データと見なし、被検査パターン画像yを出力データと見なして、第1の線形予測モデルを設定する方法について説明する。
First, in the first equation generation step S14, the first
ここでは、第1の線形予測モデルとして、1×5画素の領域を用いた1×5次の線形予測モデルを用いる。このモデルで用いるサフィックスを以下の表(1)に示す。
![]()
![]()
表(1)に示すようにサフィックスを取り、入力データ(階調値)と出力データ(階調値)をそれぞれv(i,j)、y(i,j)あるいはvi,j、yi,jとする。図5は、第1の線形予測モデルを説明するための図である。被検査パターン画像10の着目する画素20のサフィックス(座標)をi,jとする。そして、シフトした検査基準パターン画像12で同じ座標の画素26と画素26の左右2個ずつの画素28の合計5個の画素のサフィックスを表(1)のように設定する。そして、ある1組の1×5領域の画素データについて、以下に示す式(3)のような関係式を設定する。
ここで、式(3)に示す関係式における各座標のシフトした検査基準パターン画像データv(i,j)に乗じるa0〜a4は、同定すべきモデルパラメータ(係数)である。式(3)の意味するところは、被検査パターン画像10のある1画素20のデータyk=y(i,j)は、対応するシフトした検査基準パターン画像12の1画素26とその左右の画素28とで構成する1×5画素のデータの線形結合で表すことができるということである。このように、線形予測モデルで畳み込み演算を行なうことで、画像のうねりやノイズを補正することができる。式(3)をベクトル形式(行列形式)で表すと、式(4−1)〜式(4−3)のように示すことができる。
ここで、式(4−1)〜式(4−3)において、シフトした検査基準パターン画像vと被検査パターン画像yの座標(i,j)を走査して5組のデータを連立させれば、モデルパラメータを同定することができる。ここで、統計的観点から、以下の式(5−1)のようにn(>5)組のデータを用意して、以下の式(5−2)のような最小2乗法に基づいて5次元の連立方程式を解き、αを同定しても好適である。この様な方程式の解法としては、最小2乗法の他に最尤推定法などがあり、どのような方法を使用しても構わない。
例えば、シフトした検査基準パターン画像12と被検査パターン画像10がそれぞれ512×512画素であれば、約25万組のデータが得られることになり、統計的に見て充分な個数を確保することができる。第1の方程式生成部206(図1)は、被検査パターン画像と被検査パターン画像から式(5−1)及び式(5−2)の連立方程式、すなわち、5×5要素のマトリックス(ATA)と、5要素のベクトルATyを生成する。
For example, if the shifted inspection
第1のパラメータ推定ステップS16において、第1のパラメータ推定部208は、式(5−1)及び式(5−2)の連立方程式を解いて、パラメータα(係数)を算出する演算を行う。すなわち、パラメータa0〜a4(係数)を算出する。
In the first parameter estimation step S16, the first
第1の補正パターン画像生成ステップS18として、第1の補正パターン画像生成部210は、第1の連立方程式のパラメータが代入された第1の線形予測モデルを用いて、画像シフトステップS12でシフトする前の検査基準パターン画像uを、画像シフトステップS12のシフト方向に対し垂直な方向、ここでは水平方向に補正した第1の補正パターン画像wを生成する。すなわち、第1のパラメータ推定ステップS16で得られたパラメータajを以下の式(6)に示すように用いて、座標(i,j)の第1の補正パターン画像データwi,jを演算する。そして、演算結果を第2の方程式生成部212に出力する。ここで、ui,jは検査基準パターン画像データである。
以上のようにして、第1の補正パターン画像生成部210は、第1のパラメータ推定部208で得られたパラメータαを用いて、検査基準パターン画像uに対し、水平方向の補正を加えた第1の補正パターン画像wを生成する。
As described above, the first correction pattern
次に、第2の方程式生成ステップS20、第2のパラメータ推定ステップS22、第2の補正パターン画像生成ステップS24の一連のステップで、第1の補正パターン画像wを、画像シフトステップS12でのシフト方向と同一の方向に補正する。この実施の形態においては、画像シフトステップS12が垂直方向にシフトしているため、これと同一の垂直方向の補正を行う。すなわち、水平方向に補正が行われた第1の補正パターン画像wに対し、垂直方向の補正を行うことになる。 Next, the first correction pattern image w is shifted in the image shift step S12 in a series of steps of the second equation generation step S20, the second parameter estimation step S22, and the second correction pattern image generation step S24. Correct in the same direction as the direction. In this embodiment, since the image shift step S12 is shifted in the vertical direction, the same correction in the vertical direction is performed. That is, the vertical correction is performed on the first correction pattern image w corrected in the horizontal direction.
まず、第2の方程式生成ステップS20において、第2の方程式生成部212は、被検査パターン画像yのデータと対応する第1の補正パターン画像wのデータとを用いて、第2の線形予測モデルに基づく連立方程式を生成する。以下、第1の補正パターン画像wを入力データと見なし、被検査パターン画像yを出力データと見なして第2の線形予測モデルを設定する方法について説明する。
First, in the second equation generation step S20, the second
ここでは、第2の線形予測モデルとして、5×1画素の領域を用いた5×1次の線形予測モデルを用いる。このモデルで用いるサフィックスを以下の表(2)に示す。
表(2)に示すようにサフィックスを取り、入力データ(階調値)と出力データ(階調値)をそれぞれw(i,j)、y(i,j)とする。図6は、第2の線形予測モデルを説明するための図である。被検査パターン画像10の着目する画素20のサフィックス(座標)をi,jとする。そして、第1の補正パターン画像14で同じ座標の画素22と画素22の上下2個ずつの画素24の合計5個の画素のサフィックスを表(2)のように設定する。そして、ある1組の5×1領域の画素データについて、以下に示す式(7)のような関係式を設定する。
ここで、第1の方程式生成ステップS14と同様に
![]()
![]()
第2のパラメータ推定ステップS22として、第2のパラメータ推定部214は、式(9)の連立方程式を解いて、この連立方程式における各座標の第1の補正パターン画像wに乗じるパラメータβ(係数)を算出する演算を行う。
As the second parameter estimation step S22, the second
第2の補正パターン画像生成ステップS24として、第2の補正パターン画像生成部216は、得られた第2の補正モデルパラメータbjを以下の式(10)に示すように用いて、座標(i,j)の第2の補正パターン画像データxi,jを演算する。そして、演算結果を比較部146に出力する。ここで、wi,jは第1の補正パターン画像データである。
以上のようにして、第2の補正パターン画像生成部は、第2のパラメータ推定部で得られたパラメータβを用いて、第1の補正パターン画像wから第2の補正パターン画像xを生成する。 As described above, the second correction pattern image generation unit generates the second correction pattern image x from the first correction pattern image w using the parameter β obtained by the second parameter estimation unit. .
比較ステップS26として、比較部146は、第2の補正パターン画像データxi,jと被検査パターン画像データy(i,j)とを所定のアルゴリズムを用いて比較する。そして、欠陥の有無を検査し、その結果を出力する。
As the comparison step S26, the
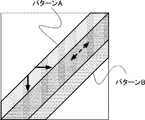
図7は、本実施の形態の作用を説明する図である。ここで、パターンAをパターンBにあわせる補正を行う場合を例に説明する。パターンAとパターンBは2つの異なる画像に個別に含まれており、図では重ねて表示している。補正のパラメータが2次元の場合、すなわち、補正のシフトが水平、垂直方向同時に行われる場合、図中破腺矢印で示すように、パターンのエッジと平行な方向へのシフト量が任意となる。その結果、推定で得られるシフトパラメータの、パターンのエッジと平行な方向の寄与が不定となり、良好なシフトパラメータを得られない可能性がある。例えば、シフトする画像に欠陥像があった場合、その欠陥像がパターンのエッジと平行な方向にぼけてしまうことがある。 FIG. 7 is a diagram for explaining the operation of the present embodiment. Here, a case where correction for matching pattern A with pattern B is performed will be described as an example. Pattern A and pattern B are individually included in two different images, and are displayed in an overlapping manner in the figure. When the correction parameter is two-dimensional, that is, when the correction is shifted simultaneously in the horizontal and vertical directions, the amount of shift in the direction parallel to the pattern edge is arbitrary as shown by the broken line arrow in the figure. As a result, the contribution of the shift parameter obtained by the estimation in the direction parallel to the edge of the pattern becomes indefinite, and a good shift parameter may not be obtained. For example, if there is a defect image in the shifted image, the defect image may be blurred in a direction parallel to the edge of the pattern.
これに対し、本実施の形態の第1のパターン画像生成、第2のパターン画像生成のように、補正のパラメータを1次元に限定する場合、すなわち、補正のシフトが水平方向または垂直方向のいずれかに固定される場合、図中実線矢印で示すように、2つのパターンのエッジ位置が一致する場所が存在する。このように、推定する係数の自由度がパターンのエッジ位置で拘束されるので、良好なシフトパラメータを得ることできる。ただし、画像が水平あるいは垂直方向のパターンのみで占められている場合は、水平あるいは垂直方向のパラメータが不定となることがある。この場合でもシフトパラメータが1次元であるため、パラメータが異常であることが、パラメータの重心判定等により容易に判別できる。また、式(1−1)、(1−2)と式(6)、(10)は同形である。したがって、異常なパラメータは、前述のバイキュービック補間法パラメータpあるいはqと置き換えることが可能であり、その操作によって良好な補正画像を得ることができる。 On the other hand, when the correction parameters are limited to one dimension as in the first pattern image generation and the second pattern image generation of the present embodiment, that is, the correction shift is either horizontal or vertical. In the case of being fixed, there is a place where the edge positions of the two patterns coincide as indicated by solid arrows in the figure. Thus, since the degree of freedom of the coefficient to be estimated is constrained by the edge position of the pattern, a good shift parameter can be obtained. However, if the image is occupied only by a horizontal or vertical pattern, the horizontal or vertical parameter may be indefinite. Even in this case, since the shift parameter is one-dimensional, it can be easily determined that the parameter is abnormal by determining the center of gravity of the parameter. Moreover, Formula (1-1), (1-2) and Formula (6), (10) are the same shape. Therefore, the abnormal parameter can be replaced with the aforementioned bicubic interpolation parameter p or q, and a good corrected image can be obtained by the operation.
以上のように、上述したステップで生成した第2の補正パターン画像xは、補正のシフト方向が不定となることに起因して欠陥信号が劣化することを回避しながら、検査基準画像uを被検査パターン画像yに合わせて補正した画像に相当する。特に水平方向、垂直方向を逐次推定する効果により、斜線パターン等に見られる、ある方向成分が不定となるような場合に良好な推定が行える。従って、ここで得られた第2の補正パターン画像xと、被検査パターンyを比較することにより、高精度な検査を行うことができる。 As described above, the second correction pattern image x generated in the above-described step is subjected to the inspection reference image u while avoiding the deterioration of the defect signal due to the indefinite shift direction of the correction. This corresponds to an image corrected in accordance with the inspection pattern image y. In particular, due to the effect of sequentially estimating the horizontal direction and the vertical direction, good estimation can be performed when a certain direction component, such as a hatched pattern, becomes indefinite. Therefore, by comparing the second correction pattern image x obtained here with the pattern to be inspected y, a highly accurate inspection can be performed.
なお、本実施の形態においては、検査基準パターン画像を、相対シフト量に基づいて垂直方向のシフト方向にシフトし、その後、水平方向の補正、垂直方向の補正を逐次行う場合を例に説明した。しかし、検査基準パターン画像を、相対シフト量に基づいて水平方向のシフト方向にシフトし、その後、垂直方向の補正、水平方向の補正を逐次行っても同様の効果を得ることが可能である。 In the present embodiment, an example has been described in which the inspection reference pattern image is shifted in the vertical shift direction based on the relative shift amount, and then the horizontal correction and the vertical correction are sequentially performed. . However, the same effect can be obtained by shifting the inspection reference pattern image in the horizontal shift direction based on the relative shift amount, and then sequentially performing the vertical correction and the horizontal correction.
また、第1の線形予測モデルが1×5画素の領域を用いた1×5次のモデルであり、かつ、第2の線形予測モデルが5×1画素の領域を用いた5×1次のモデルである場合を例に説明した。補正の精度および計算処理時間の観点からは、1×5次、5×1次程度が適当である。しかし、必ずしも、1×5次のモデルおよび5×1次のモデルである必要はなく、nを3以上の任意の整数とする1×n次のモデルおよびn×1次のモデルを採用することが可能である。そして、第1の線形予測モデルがn×1画素の領域を用いたn×1次のモデルであり、かつ、第2の線形予測モデルが1×n画素の領域を用いた1×n次のモデルとしても構わない。 In addition, the first linear prediction model is a 1 × 5 order model using a 1 × 5 pixel region, and the second linear prediction model is a 5 × 1 order model using a 5 × 1 pixel region. The case of a model has been described as an example. From the viewpoint of the accuracy of correction and the calculation processing time, about 1 × 5th order and 5 × 1st order are appropriate. However, the 1 × 5 order model and the 5 × 1 order model are not necessarily used, and a 1 × n order model and an n × 1 order model in which n is an arbitrary integer of 3 or more should be adopted. Is possible. The first linear prediction model is an n × 1 order model using an area of n × 1 pixels, and the second linear prediction model is an 1 × n order model using an area of 1 × n pixels. It does not matter as a model.
図8は、別の光学画像の取得手順を説明するための図である。図2の構成では、スキャン幅Wの画素数(例えば2048画素)を同時に入射するフォトダイオードアレイ105を用いているが、これに限るものではなく、図8に示すように、XYθテーブル102をX方向に定速度で送りながら、レーザ干渉計で一定ピッチの移動を検出した毎にY方向に図示していないレーザスキャン光学装置でレーザビームをY方向に走査し、透過光を検出して所定の大きさのエリア毎に二次元画像を取得する手順を用いても構わない。
FIG. 8 is a diagram for explaining another optical image acquisition procedure. In the configuration of FIG. 2, the
以上の説明において、「〜回路」或いは「〜ステップ」と記載したものは、コンピュータで動作可能なプログラムにより構成することができる。或いは、ソフトウェアとなるプログラムだけではなく、ハードウェアとソフトウェアとの組合せにより実施させても構わない。或いは、ファームウェアとの組合せでも構わない。また、プログラムにより構成される場合、プログラムは、磁気ディスク装置、磁気テープ装置、FD、或いはROM(リードオンリメモリ)等の記録媒体に記録される。例えば、図2の演算制御部を構成するテーブル制御回路114、展開回路111、参照回路112、比較回路108等は、電気的回路で構成されていても良いし、制御計算機110によって処理することのできるソフトウェアとして実現してもよい。また電気的回路とソフトウェアの組み合わせで実現しても良い。
In the above description, what is described as “˜circuit” or “˜step” can be configured by a computer-operable program. Or you may make it implement by not only the program used as software but the combination of hardware and software. Alternatively, a combination with firmware may be used. When configured by a program, the program is recorded on a recording medium such as a magnetic disk device, a magnetic tape device, an FD, or a ROM (Read Only Memory). For example, the
以上、具体例を参照しつつ実施の形態について説明した。しかし、本発明は、これらの具体例に限定されるものではない。例えば、各実施の形態では、透過光を用いているが、反射光あるいは、透過光と反射光を同時に用いてもよい。検査基準パターン画像となる参照画像は設計データから生成しているが、フォトダイオードアレイ等のセンサにより撮像した同一パターンのデータを用いても良い。言い換えれば、die to die検査でもdie to database検査でも構わない。 The embodiments have been described above with reference to specific examples. However, the present invention is not limited to these specific examples. For example, in each embodiment, transmitted light is used, but reflected light or transmitted light and reflected light may be used simultaneously. Although the reference image to be the inspection standard pattern image is generated from the design data, data of the same pattern captured by a sensor such as a photodiode array may be used. In other words, a die to die inspection or a die to database inspection may be used.
また、装置構成や制御手法等、本発明の説明に直接必要しない部分等については記載を省略したが、必要とされる装置構成や制御手法を適宜選択して用いることができる。その他、本発明の要素を具備し、当業者が適宜設計変更しうる全ての補正パターン画像生成装置、パターン検査装置、或いは補正パターン画像生成方法は、本発明の範囲に包含される。 In addition, although descriptions are omitted for parts and the like that are not directly required for the description of the present invention, such as a device configuration and a control method, a required device configuration and a control method can be appropriately selected and used. In addition, any correction pattern image generation apparatus, pattern inspection apparatus, or correction pattern image generation method that includes the elements of the present invention and that can be appropriately modified by those skilled in the art is included in the scope of the present invention.
100 パターン検査装置
108 比較回路
140 位置合わせ部
146 比較部
200 補正パターン画像生成部
202 相対シフト量算出部
204 画像シフト部
206 第1の方程式生成部
208 第1のパラメータ推定部
210 第1の補正パターン画像生成部
212 第2の方程式生成部
214 第2のパラメータ推定部
216 第2の補正パターン画像生成部
100
Claims (3)
被検査パターン画像と前記検査基準パターン画像の位置合わせを行い、サブ画素単位の相対シフト量を算出する相対シフト量算出部と、
前記検査基準パターン画像を、前記相対シフト量に基づいて垂直または水平方向のいずれか一方のシフト方向にシフトする画像シフト部と、
前記被検査パターン画像およびシフトした前記検査基準パターン画像に対して、第1の線形予測モデルを用いた入出力関係を記述する第1の連立方程式を生成する第1の方程式生成部と、
前記第1の連立方程式のパラメータを求める第1のパラメータ推定部と、
前記第1の連立方程式のパラメータが代入された前記第1の線形予測モデルを用いて、前記検査基準パターン画像を、前記シフト方向に対し垂直な方向に補正した第1の補正パターン画像を生成する第1の補正パターン画像生成部と、
前記被検査パターン画像および前記第1の補正パターン画像に対して、第2の線形予測モデルを用いた入出力関係を記述する第2の連立方程式を生成する第2の方程式生成部と、
前記第2の連立方程式のパラメータを求める第2のパラメータ推定部と、
前記第2の連立方程式のパラメータが代入された前記第2の線形予測モデルを用いて、前記第1の補正パターン画像を、前記シフト方向と同一の方向に補正した第2の補正パターン画像を生成する第2の補正パターン画像生成部と、
を備え、
前記第1の線形予測モデルが1×n(nは3以上の整数)画素の領域を入力とする1×n次のモデルであり、かつ、前記第2の線形予測モデルがn×1画素の領域を入力とするn×1次のモデルであること、または、
前記第1の線形予測モデルがn×1画素の領域を入力とするn×1次のモデルであり、かつ、前記第2の線形予測モデルが1×n画素の領域を入力とする1×n次のモデルであることを特徴とする補正パターン画像生成装置。 A correction pattern image generation device for correcting an inspection reference pattern image used for pattern inspection of a sample,
A relative shift amount calculation unit that performs alignment between the inspection pattern image and the inspection reference pattern image and calculates a relative shift amount in sub-pixel units;
An image shift unit that shifts the inspection reference pattern image in either the vertical or horizontal shift direction based on the relative shift amount;
A first equation generation unit that generates a first simultaneous equation describing an input / output relationship using a first linear prediction model for the inspection pattern image and the shifted inspection reference pattern image;
A first parameter estimation unit for obtaining a parameter of the first simultaneous equations;
Using the first linear prediction model into which the parameters of the first simultaneous equations are substituted, a first correction pattern image is generated by correcting the inspection reference pattern image in a direction perpendicular to the shift direction. A first correction pattern image generation unit;
A second equation generation unit for generating a second simultaneous equation describing an input / output relationship using a second linear prediction model for the inspection pattern image and the first correction pattern image;
A second parameter estimation unit for obtaining a parameter of the second simultaneous equation;
Using the second linear prediction model in which the parameters of the second simultaneous equations are substituted, a second correction pattern image is generated by correcting the first correction pattern image in the same direction as the shift direction. A second correction pattern image generation unit that
Equipped with a,
The first linear prediction model is a 1 × n-order model that receives an area of 1 × n (n is an integer of 3 or more) pixels, and the second linear prediction model has n × 1 pixels. An n × 1 order model with a region as input, or
The first linear prediction model is an n × 1 order model that receives an n × 1 pixel region, and the second linear prediction model uses a 1 × n pixel region as an input 1 × n. characterized Oh Rukoto in the following model correction pattern image generating apparatus.
被検査パターン画像と前記検査基準パターン画像の位置合わせを行い、サブ画素単位の相対シフト量を算出する相対シフト量算出ステップと、
前記検査基準パターン画像を、前記相対シフト量に基づいて垂直または水平方向のいずれか一方のシフトする画像シフトステップと、
前記被検査パターン画像およびシフトした前記検査基準パターン画像に対して、第1の線形予測モデルを用いた入出力関係を記述する第1の連立方程式を生成する第1の方程式生成ステップと、
前記第1の連立方程式のパラメータを求める第1のパラメータ推定ステップと、
前記第1の連立方程式のパラメータが代入された前記第1の線形予測モデルを用いて、前記検査基準パターン画像を、前記シフト方向に対し垂直な方向に補正した、第1の補正パターン画像を生成する第1の補正パターン画像生成ステップと、
前記被検査パターン画像および前記第1の補正パターン画像に対して、第2の線形予測モデルを用いた入出力関係を記述する第2の連立方程式を生成する第2の方程式生成ステップと、
前記第2の連立方程式のパラメータを求める第2のパラメータ推定ステップと、
前記第2の連立方程式のパラメータが代入された前記第2の線形予測モデルを用いて、前記第1の補正パターン画像を、前記シフト方向と同一の方向に補正した第2の補正パターン画像を生成する第2の補正パターン画像生成ステップと、
を備え、
前記第1の線形予測モデルが1×n(nは3以上の整数)画素の領域を入力とする1×n次のモデルであり、かつ、前記第2の線形予測モデルがn×1画素の領域を入力とするn×1次のモデルであること、または、
前記第1の線形予測モデルがn×1画素の領域を入力とするn×1次のモデルであり、かつ、前記第2の線形予測モデルが1×n画素の領域を入力とする1×n次のモデルであることを特徴とする補正パターン画像生成方法。
A correction pattern image generation method for correcting an inspection reference pattern image used for pattern inspection of a sample,
Relative shift amount calculating step for performing alignment between the pattern image to be inspected and the inspection reference pattern image, and calculating a relative shift amount in sub-pixel units;
An image shift step of shifting the inspection reference pattern image in either the vertical or horizontal direction based on the relative shift amount;
A first equation generating step for generating a first simultaneous equation describing an input / output relationship using a first linear prediction model for the inspection pattern image and the shifted inspection reference pattern image;
A first parameter estimating step for obtaining a parameter of the first simultaneous equations;
Using the first linear prediction model in which the parameters of the first simultaneous equations are substituted, a first correction pattern image is generated by correcting the inspection reference pattern image in a direction perpendicular to the shift direction. A first correction pattern image generation step,
A second equation generation step for generating a second simultaneous equation describing an input / output relationship using a second linear prediction model for the inspection pattern image and the first correction pattern image;
A second parameter estimating step for obtaining a parameter of the second simultaneous equation;
Using the second linear prediction model in which the parameters of the second simultaneous equations are substituted, a second correction pattern image is generated by correcting the first correction pattern image in the same direction as the shift direction. A second correction pattern image generation step,
Equipped with a,
The first linear prediction model is a 1 × n-order model that receives an area of 1 × n (n is an integer of 3 or more) pixels, and the second linear prediction model has n × 1 pixels. An n × 1 order model with a region as input, or
The first linear prediction model is an n × 1 order model that receives an n × 1 pixel region, and the second linear prediction model uses a 1 × n pixel region as an input 1 × n. correction pattern image generating method comprising Oh Rukoto in the following model.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008071959A JP4772815B2 (en) | 2008-03-19 | 2008-03-19 | Correction pattern image generation apparatus, pattern inspection apparatus, and correction pattern image generation method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008071959A JP4772815B2 (en) | 2008-03-19 | 2008-03-19 | Correction pattern image generation apparatus, pattern inspection apparatus, and correction pattern image generation method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009229555A JP2009229555A (en) | 2009-10-08 |
| JP4772815B2 true JP4772815B2 (en) | 2011-09-14 |
Family
ID=41245070
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008071959A Active JP4772815B2 (en) | 2008-03-19 | 2008-03-19 | Correction pattern image generation apparatus, pattern inspection apparatus, and correction pattern image generation method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4772815B2 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4988000B2 (en) * | 2010-03-17 | 2012-08-01 | 株式会社東芝 | Pattern inspection apparatus and pattern inspection method |
| JP5921990B2 (en) * | 2012-08-23 | 2016-05-24 | 株式会社ニューフレアテクノロジー | Defect detection method |
| KR102521949B1 (en) * | 2018-08-31 | 2023-04-18 | 삼성디스플레이 주식회사 | Image compensator and method for driving display device |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0658216B2 (en) * | 1986-01-13 | 1994-08-03 | 株式会社日立製作所 | Pattern defect determination device |
| JPS62168270A (en) * | 1986-01-20 | 1987-07-24 | Nippon Kogaku Kk <Nikon> | Pattern changing device |
| JPH0786349A (en) * | 1993-09-16 | 1995-03-31 | Fujitsu Ltd | Inspection device using electron beam |
| JP3524853B2 (en) * | 1999-08-26 | 2004-05-10 | 株式会社ナノジオメトリ研究所 | Pattern inspection apparatus, pattern inspection method, and recording medium |
| JP4597509B2 (en) * | 1999-08-26 | 2010-12-15 | 株式会社ナノジオメトリ研究所 | Pattern inspection apparatus and pattern inspection method |
| JP4074624B2 (en) * | 2005-03-31 | 2008-04-09 | アドバンスド・マスク・インスペクション・テクノロジー株式会社 | Pattern inspection method |
| JP4233556B2 (en) * | 2005-09-22 | 2009-03-04 | アドバンスド・マスク・インスペクション・テクノロジー株式会社 | Image correction apparatus, pattern inspection apparatus, image correction method, and pattern inspection method |
| JP4203498B2 (en) * | 2005-09-22 | 2009-01-07 | アドバンスド・マスク・インスペクション・テクノロジー株式会社 | Image correction apparatus, pattern inspection apparatus, image correction method, and pattern defect inspection method |
| JP4199786B2 (en) * | 2006-08-10 | 2008-12-17 | アドバンスド・マスク・インスペクション・テクノロジー株式会社 | Sample inspection apparatus, image alignment method, and program |
| JP4943304B2 (en) * | 2006-12-05 | 2012-05-30 | 株式会社 Ngr | Pattern inspection apparatus and method |
| JP4652391B2 (en) * | 2006-12-08 | 2011-03-16 | 株式会社東芝 | Pattern inspection apparatus and pattern inspection method |
| JP2008233343A (en) * | 2007-03-19 | 2008-10-02 | Advanced Mask Inspection Technology Kk | Sample inspecting device, and corrected image generating method and program |
-
2008
- 2008-03-19 JP JP2008071959A patent/JP4772815B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009229555A (en) | 2009-10-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4554691B2 (en) | Correction pattern image generation apparatus, pattern inspection apparatus, and correction pattern image generation method | |
| US8233698B2 (en) | Pattern inspection apparatus, corrected image generation method, and computer-readable recording medium storing program | |
| JP5753461B2 (en) | Pattern inspection apparatus and pattern inspection method | |
| JP4199786B2 (en) | Sample inspection apparatus, image alignment method, and program | |
| KR101540215B1 (en) | Evaluation method of inspection sensitivity | |
| TW201721284A (en) | Examination method and examination device | |
| JP4970569B2 (en) | Pattern inspection apparatus and pattern inspection method | |
| JP2010096740A (en) | Apparatus and method for pattern inspection | |
| JP6633918B2 (en) | Pattern inspection equipment | |
| JP6310263B2 (en) | Inspection device | |
| JP5514754B2 (en) | Inspection apparatus and inspection method | |
| JP2017053674A (en) | Displacement amount measurement method of pattern width dimension and pattern inspection device | |
| US20110229009A1 (en) | Pattern inspection apparatus and pattern inspection method | |
| US7577288B2 (en) | Sample inspection apparatus, image alignment method, and program-recorded readable recording medium | |
| JP4323475B2 (en) | Sample inspection apparatus, sample inspection method, and program | |
| JP5178781B2 (en) | Sensor output data correction device and sensor output data correction method | |
| KR20160142801A (en) | Instrumentation device and instrumentation method | |
| JP4772815B2 (en) | Correction pattern image generation apparatus, pattern inspection apparatus, and correction pattern image generation method | |
| KR102146943B1 (en) | Instrumentation device and instrumentation method | |
| JP4629086B2 (en) | Image defect inspection method and image defect inspection apparatus | |
| JP7525251B2 (en) | Method for determining sensitivity fluctuation of TDI (time delay integration) sensor, pattern inspection method, and pattern inspection device | |
| JP4456613B2 (en) | Correction pattern image generation apparatus and correction pattern image generation method | |
| JP4960404B2 (en) | Pattern inspection apparatus and pattern inspection method | |
| JP4554635B2 (en) | Pattern inspection apparatus, pattern inspection method, and program | |
| JP2024137016A (en) | Pattern inspection method and pattern inspection device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20100917 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110401 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110426 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110531 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110622 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140701 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4772815 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313115 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313115 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |