JP4425193B2 - モータの位置センサレス制御装置 - Google Patents
モータの位置センサレス制御装置 Download PDFInfo
- Publication number
- JP4425193B2 JP4425193B2 JP2005235720A JP2005235720A JP4425193B2 JP 4425193 B2 JP4425193 B2 JP 4425193B2 JP 2005235720 A JP2005235720 A JP 2005235720A JP 2005235720 A JP2005235720 A JP 2005235720A JP 4425193 B2 JP4425193 B2 JP 4425193B2
- Authority
- JP
- Japan
- Prior art keywords
- axis
- current
- motor
- superimposed
- voltage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/22—Current control, e.g. using a current control loop
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
以下、本発明の第1実施形態につき、詳細に説明する。図1は、本発明を適用したモータ駆動システムのブロック構成図である。1は、永久磁石を回転子(不図示)に、電機子巻線を固定子(不図示)に設けた三相永久磁石同期モータ1(以下、単に「モータ1」と記すことがある)である。モータ1として、突極機(突極性を有するモータ)及び非突極機(非突極性を有するモータ)の何れをも採用可能である。後に非突極機を採用した場合における動作も説明するが、主としてモータ1が突極機(例えば、埋込磁石形同期モータ)である場合を例にとり説明を行う。

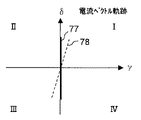
II、III及びIVは、γ−δ軸(γ−δ座標)上での第1、第2、第3及び第4象限を表している。
次に、本発明の第2実施形態につき、詳細に説明する。図18は、第2実施形態に係るモータ駆動システムの詳細な構成ブロック図である。第2実施形態に係るモータ駆動システムは、モータ1と、インバータ2と、位置センサレス制御装置3aと、を有して構成される。位置センサレス制御装置3aは、図3の位置センサレス制御装置3における重畳電圧生成部21並びに加算器22及び23を重畳電流生成部24並びに加算器25及び26に置換すると共に、図3の位置センサレス制御装置3における位置・速度推定器20、電流制御部15及び座標変換器18を、それぞれ位置・速度推定器20a(以下、「推定器20a」という)、電流制御部15a及び座標変換器18aに置換した点で図3の位置センサレス制御装置3と相違しており、その他の点では基本的に位置センサレス制御装置3と一致している。図18において、図3と同一の部分には同一の符号を付し、原則として同一の部分に関する重複する説明を省略する。
2 PWMインバータ
3、3a 位置センサレス制御装置
11 電流検出器
12 座標変換器
13、14、19 減算器
15、15a 電流制御部
16 磁束制御部
17 速度制御部
18、18a 座標変換器
20、20a 位置・速度推定器
21 重畳電圧生成部
22、23 加算器
24 重畳電流生成部
25、26 加算器
31、32、31a、32b バンドパスフィルタ
33、33a 掛算器
34、34a ローパスフィルタ
35、35a 比例積分演算器
36、36a 積分器
37 n周期積分器
38 ローパスフィルタ
39 移動平均部
ω* モータ速度指令値
ωe 推定モータ速度
θe 推定回転子位置
vu * U相電圧指令値
vv * V相電圧指令値
vw * W相電圧指令値
vγ* γ軸電圧指令値
vδ* δ軸電圧指令値
iγ* γ軸電流指令値
iδ* δ軸電流指令値
iγ γ軸電流
iδ δ軸電流
id d軸電流
iq q軸電流
vhγ γ軸重畳電圧
vhδ δ軸重畳電圧
ihD 直流成分
ihγ γ軸重畳電流
ihδ δ軸重畳電流
vhD 直流成分
Claims (10)
- 回転子を構成する永久磁石が作る磁束に平行な軸をd軸、d軸に対応する制御上の推定軸をγ軸、γ軸から電気角で90度進んだ推定軸をδ軸とし、
d軸とγ軸との軸誤差が小さくなるようにモータを制御するモータの位置センサレス制御装置であって、
前記モータを駆動する駆動電流に、該駆動電流とは異なる周波数の重畳電流を重畳する重畳部と、
前記モータに供給したモータ電流から前記重畳電流のγ軸成分とδ軸成分を抽出する重畳成分抽出部と、
抽出された前記重畳電流のγ軸成分とδ軸成分の積に基づいて前記モータを制御することにより、前記軸誤差を小さくする制御部と、を備え、
前記制御部は、前記積の直流成分が所定の値に収束するように前記モータを制御することにより、前記軸誤差を小さくする
ことを特徴とする位置センサレス制御装置。 - 前記重畳部は、前記駆動電流を流すために前記モータへ印加する駆動電圧に、前記重畳電流に応じた重畳電圧を重畳することによって、前記駆動電流に前記重畳電流を重畳することを特徴とする請求項1に記載の位置センサレス制御装置。
- 前記重畳電圧のγ−δ軸上での電圧ベクトル軌跡は、γ軸またはδ軸を基準として対象性を有する図形を成す
ことを特徴とする請求項2に記載の位置センサレス制御装置。 - 前記モータは非突極性を有するモータであり、
前記重畳部は、前記重畳電流のγ軸成分に起因する磁気飽和によって前記モータのインダクタンスのd軸成分が変化するような電圧を、前記重畳電圧として前記駆動電圧に重畳する
ことを特徴とする請求項2又は請求項3に記載の位置センサレス制御装置。 - 前記制御部は、前記直流成分がゼロに収束するように前記モータを制御することにより、前記軸誤差を小さくする
ことを特徴とする請求項1乃至請求項5の何れかに記載の位置センサレス制御装置。 - 回転子を構成する永久磁石が作る磁束に平行な軸をd軸、d軸に対応する制御上の推定軸をγ軸、γ軸から電気角で90度進んだ推定軸をδ軸とし、
d軸とγ軸との軸誤差が小さくなるようにモータを制御するモータの位置センサレス制御装置であって、
前記モータを駆動する駆動電流に、該駆動電流とは異なる周波数の重畳電流を重畳する重畳部と、
前記駆動電流に前記重畳電流を重畳するために前記モータへ印加する重畳電圧のγ軸成分とδ軸成分を抽出する重畳成分抽出部と、
抽出された前記重畳電圧のγ軸成分とδ軸成分の積に基づいて前記モータを制御することにより、前記軸誤差を小さくする制御部と、を備え、
前記制御部は、前記積の直流成分が所定の値に収束するように前記モータを制御することにより、前記軸誤差を小さくする
ことを特徴とする位置センサレス制御装置。 - 前記制御部は、前記直流成分がゼロに収束するように前記モータを制御することにより、前記軸誤差を小さくする
ことを特徴とする請求項6に記載の位置センサレス制御装置。 - 前記重畳電流のγ−δ軸上での電流ベクトル軌跡は、γ軸またはδ軸を基準として対象性を有する図形を成す
ことを特徴とする請求項6又は請求項7に記載の位置センサレス制御装置。 - 前記モータは非突極性を有するモータであり、
前記重畳部は、前記重畳電流のγ軸成分に起因する磁気飽和によって前記モータのインダクタンスのd軸成分が変化するような電流を、前記重畳電流として前記駆動電流に重畳する
ことを特徴とする請求項6〜請求項8の何れかに記載の位置センサレス制御装置。 - モータと、
前記モータを駆動するインバータと、
前記インバータを制御することにより前記モータを制御する請求項1〜請求項9の何れかに記載の位置センサレス制御装置と、を備えた
ことを特徴とするモータ駆動システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005235720A JP4425193B2 (ja) | 2005-08-16 | 2005-08-16 | モータの位置センサレス制御装置 |
| US11/503,247 US7245104B2 (en) | 2005-08-16 | 2006-08-14 | Position-sensorless motor control device |
| CN2009101354892A CN101534088B (zh) | 2005-08-16 | 2006-08-14 | 电动机的无位置传感器控制装置 |
| CNB2006101149292A CN100499351C (zh) | 2005-08-16 | 2006-08-14 | 电动机的无位置传感器控制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005235720A JP4425193B2 (ja) | 2005-08-16 | 2005-08-16 | モータの位置センサレス制御装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009216771A Division JP2010022188A (ja) | 2009-09-18 | 2009-09-18 | モータの位置センサレス制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007053829A JP2007053829A (ja) | 2007-03-01 |
| JP2007053829A5 JP2007053829A5 (ja) | 2009-08-13 |
| JP4425193B2 true JP4425193B2 (ja) | 2010-03-03 |
Family
ID=37738269
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005235720A Expired - Fee Related JP4425193B2 (ja) | 2005-08-16 | 2005-08-16 | モータの位置センサレス制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7245104B2 (ja) |
| JP (1) | JP4425193B2 (ja) |
| CN (2) | CN100499351C (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2851524A1 (en) | 2013-09-20 | 2015-03-25 | Panasonic Corporation | Power generation control system, power generation apparatus, and control method for rankine cycle system |
Families Citing this family (59)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB0517907D0 (en) * | 2005-09-02 | 2005-10-12 | Melexis Gmbh | Improvements in or relating to driving brushless DC (BLDC) motors |
| JP4716118B2 (ja) * | 2006-03-29 | 2011-07-06 | 株式会社ジェイテクト | モータ制御装置 |
| JP5109416B2 (ja) * | 2007-03-06 | 2012-12-26 | 株式会社デンソー | 回転機の制御装置 |
| JP2008220096A (ja) * | 2007-03-06 | 2008-09-18 | Toshiba Corp | 同期電動機のセンサレス制御装置 |
| JP5176406B2 (ja) * | 2007-05-24 | 2013-04-03 | 日本電産株式会社 | 交流電動機の回転子位相速度推定装置 |
| JP4297953B2 (ja) * | 2007-06-22 | 2009-07-15 | 三洋電機株式会社 | モータ制御装置及び圧縮機 |
| JP5176420B2 (ja) | 2007-08-02 | 2013-04-03 | 株式会社ジェイテクト | ブラシレスモータのセンサレス制御装置 |
| JP2009055748A (ja) | 2007-08-29 | 2009-03-12 | Sanyo Electric Co Ltd | 電流検出ユニット及びモータ制御装置 |
| JP5172286B2 (ja) * | 2007-11-16 | 2013-03-27 | 日立オートモティブシステムズ株式会社 | モータ制御装置およびハイブリッド自動車用制御装置 |
| US8179065B2 (en) * | 2008-04-30 | 2012-05-15 | Rockwell Automation Technologies, Inc. | Position sensorless control of permanent magnet motor |
| JP5534292B2 (ja) | 2008-06-30 | 2014-06-25 | 株式会社ジェイテクト | 車両用操舵装置 |
| DE502008002884D1 (de) * | 2008-07-07 | 2011-04-28 | Baumueller Nuernberg Gmbh | Verfahren und Anordnung zur Beobachtung der Antriebsgeschwindigkeit eines Permanentmagnet-Läufers in einem Antriebsregelkreis |
| JP5376856B2 (ja) * | 2008-08-01 | 2013-12-25 | キヤノン株式会社 | 通信システム及び受信装置、並びにそれらの制御方法 |
| JP5324159B2 (ja) * | 2008-08-20 | 2013-10-23 | 三洋電機株式会社 | モータ制御装置 |
| GB0815672D0 (en) * | 2008-08-28 | 2008-10-08 | Melexis Nv | Improvements of accuracy of rotor position detection relating to the control of brushless dc motors |
| JP5281339B2 (ja) * | 2008-09-01 | 2013-09-04 | 株式会社日立製作所 | 同期電動機の駆動システム、及びこれに用いる制御装置 |
| CN102224664A (zh) | 2008-09-23 | 2011-10-19 | 威罗门飞行公司 | 用于开口三角形h桥驱动的高效无铁芯永磁电机的预测脉冲宽度调制 |
| CA2740404C (en) * | 2008-09-23 | 2014-07-22 | Aerovironment, Inc. | Sensorless optimum torque control for high efficiency ironless permanent magnet machine |
| US8076877B2 (en) * | 2008-10-17 | 2011-12-13 | Oteman David G | System and method for controlling power balance in an electrical/mechanical system |
| GB0822515D0 (en) * | 2008-12-10 | 2009-01-14 | Melexis Nv | Operation of BLDC motors |
| JP2010154598A (ja) * | 2008-12-24 | 2010-07-08 | Aisin Aw Co Ltd | センサレス電動機制御装置および駆動装置 |
| JP5151965B2 (ja) * | 2008-12-24 | 2013-02-27 | アイシン・エィ・ダブリュ株式会社 | センサレス電動機制御装置 |
| JP5376215B2 (ja) | 2009-01-30 | 2013-12-25 | 株式会社ジェイテクト | モータ制御装置 |
| JP5402106B2 (ja) * | 2009-03-10 | 2014-01-29 | 日産自動車株式会社 | 電動機の制御装置及び電動機状態推定方法 |
| JP5402105B2 (ja) * | 2009-03-10 | 2014-01-29 | 日産自動車株式会社 | 電動機の制御装置及び電動機状態推定方法 |
| JP5333839B2 (ja) * | 2009-03-12 | 2013-11-06 | 株式会社ジェイテクト | モータ制御装置 |
| JP5495018B2 (ja) | 2009-03-12 | 2014-05-21 | 株式会社ジェイテクト | モータ制御装置 |
| JP5561516B2 (ja) | 2009-07-06 | 2014-07-30 | 株式会社ジェイテクト | モータ制御装置および車両用操舵装置 |
| GB0916543D0 (en) * | 2009-09-21 | 2009-10-28 | Melexis Tessenderlo Nv | Control of sinusoidally driven brushless dc (bldc) motors |
| JP5532295B2 (ja) | 2009-11-12 | 2014-06-25 | 株式会社ジェイテクト | モータ制御装置および車両用操舵装置 |
| JP5440846B2 (ja) | 2009-11-16 | 2014-03-12 | 株式会社ジェイテクト | モータ制御装置および車両用操舵装置 |
| JP5614583B2 (ja) | 2009-11-17 | 2014-10-29 | 株式会社ジェイテクト | モータ制御装置および車両用操舵装置 |
| JP2011135641A (ja) * | 2009-12-22 | 2011-07-07 | Denso Corp | モータ制御装置 |
| JP5692569B2 (ja) | 2010-08-23 | 2015-04-01 | 株式会社ジェイテクト | 車両用操舵装置 |
| US8531143B2 (en) | 2010-09-10 | 2013-09-10 | Wisconsin Alumni Research Foundation | Permanent magnet motor with stator-based saliency for position sensorless drive |
| JP5194083B2 (ja) * | 2010-09-22 | 2013-05-08 | 山洋電気株式会社 | 電気機器の永久磁石の劣化判定方法及び装置 |
| FR2986389B1 (fr) * | 2012-01-31 | 2014-03-14 | Hispano Suiza Sa | Commande d'une machine electrique a aimants permanents |
| EP2819299B1 (en) * | 2012-02-22 | 2020-02-05 | Kabushiki Kaisha Yaskawa Denki | Magnetic-pole position estimation device for motor, and control apparatus using same |
| JP5877733B2 (ja) * | 2012-02-28 | 2016-03-08 | カルソニックカンセイ株式会社 | 電動モータの制御装置 |
| JPWO2014010020A1 (ja) * | 2012-07-09 | 2016-06-20 | 株式会社安川電機 | モータ制御装置及びモータシステム |
| CN103840725B (zh) * | 2012-11-26 | 2016-05-18 | 台达电子工业股份有限公司 | 永磁同步电机转子位置偏差测量装置及方法 |
| CN105432015A (zh) * | 2013-08-09 | 2016-03-23 | 株式会社安川电机 | 电机驱动系统以及电机控制装置 |
| FR3016256B1 (fr) | 2014-01-07 | 2016-01-22 | Leroy Somer Moteurs | Procede pour determiner la polarite d'un pole de rotor de machine electrique tournante |
| JP2015136237A (ja) * | 2014-01-17 | 2015-07-27 | 株式会社安川電機 | 回転電機制御装置、回転電機制御方法、及び制御マップの作成方法 |
| CN203708009U (zh) * | 2014-01-26 | 2014-07-09 | 中山大洋电机股份有限公司 | 一种外置控制卡的直流永磁同步电机及应用其的hvac控制系统 |
| CN104935222B (zh) * | 2015-06-03 | 2017-06-20 | 华中科技大学 | 一种无刷双馈感应发电机转速估计系统 |
| KR102596568B1 (ko) * | 2016-08-17 | 2023-11-01 | 현대모비스 주식회사 | 전동기의 회전자 각도 추정 장치 및 방법 |
| CH712829A1 (de) * | 2016-08-22 | 2018-02-28 | Lakeview Innovation Ltd | Verfahren zur sensorlosen Steuerung eines PMSM-Motors. |
| JP6623987B2 (ja) * | 2016-09-09 | 2019-12-25 | 株式会社デンソー | シフトレンジ制御装置 |
| US10830610B2 (en) | 2016-09-26 | 2020-11-10 | Analog Devices, Inc. | Method and apparatus for motor rotor position determination |
| DE102017207296A1 (de) * | 2017-05-02 | 2018-11-08 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Bestimmen des Lagewinkels eines Rotors einer elektrischen Synchronmaschine |
| US10879821B2 (en) | 2018-07-10 | 2020-12-29 | Texas Instruments Incorporated | Rotor position estimation |
| US10797629B2 (en) * | 2018-11-23 | 2020-10-06 | Texas Instruments Incorporated | Low speed sensorless rotor angle estimation |
| US11251703B2 (en) | 2019-01-14 | 2022-02-15 | Texas Instruments Incorporated | Methods and apparatus to facilitate multiple modes of converter operation |
| EP3723270B1 (en) * | 2019-04-09 | 2024-05-01 | Nabtesco Corporation | Actuator for airplane, method of driving actuator for airplane, and actuator system for airplane |
| US11705834B2 (en) | 2019-12-27 | 2023-07-18 | Texas Instruments Incorporated | Sensorless angle estimation for trapezoidal control |
| US11196371B2 (en) | 2020-01-10 | 2021-12-07 | DRiV Automotive Inc. | Sensorless position detection for electric motor |
| CN112019118B (zh) * | 2020-08-25 | 2022-04-15 | 科诺伟业风能设备(北京)有限公司 | 一种直驱风电变流器无定子电压测量矢量控制方法 |
| CN114221588B (zh) * | 2021-11-03 | 2023-08-29 | 中冶南方(武汉)自动化有限公司 | 一种永磁同步电机初始相位辨识的方法及系统 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3454210B2 (ja) * | 1999-11-30 | 2003-10-06 | 株式会社日立製作所 | 同期モータの位置センサレス制御方法 |
| US6552509B2 (en) * | 2000-05-10 | 2003-04-22 | Gti Electroproject B.V. | Method and a device for sensorless estimating the relative angular position between the stator and rotor of a three-phase synchronous motor |
| US6639380B2 (en) * | 2000-07-14 | 2003-10-28 | Sul Seung-Ki | Method and system of sensorless field orientation control for an AC motor |
| JP4560698B2 (ja) | 2000-08-03 | 2010-10-13 | 有限会社シー・アンド・エス国際研究所 | 同期電動機のベクトル制御方法 |
| US6388420B1 (en) * | 2000-11-03 | 2002-05-14 | General Electric Company | System and method for sensorless rotor tracking of induction machines |
| JP4687846B2 (ja) * | 2001-03-26 | 2011-05-25 | 株式会社安川電機 | 同期電動機の磁極位置推定方法および制御装置 |
| JP3687590B2 (ja) | 2001-11-14 | 2005-08-24 | 株式会社明電舎 | Pmモータの制御方法、および制御装置 |
| ITMI20012835A1 (it) * | 2001-12-28 | 2003-06-28 | Abb Service Srl | Procedimento per la determinazione della posizione del rotore di una macchina sincrona a corrente alternata a magneti permanenti |
| JP2003219682A (ja) | 2002-01-21 | 2003-07-31 | Daikin Ind Ltd | 電動機回転子の磁極位置検出方法およびその装置 |
| JP4370754B2 (ja) * | 2002-04-02 | 2009-11-25 | 株式会社安川電機 | 交流電動機のセンサレス制御装置および制御方法 |
| JP4063166B2 (ja) | 2002-07-31 | 2008-03-19 | 日産自動車株式会社 | 電動機の制御装置 |
| US6763622B2 (en) * | 2002-10-10 | 2004-07-20 | General Motors Corporation | Amplitude detection method and apparatus for high frequency impedance tracking sensorless algorithm |
| US6894454B2 (en) * | 2002-10-10 | 2005-05-17 | General Motors Corporation | Position sensorless control algorithm for AC machine |
| ITTO20040399A1 (it) * | 2004-06-16 | 2004-09-16 | Univ Catania | Sistema e metodo di controllo per azionamenti elettrici con motori in corrente alternata. |
| JP4459778B2 (ja) * | 2004-10-19 | 2010-04-28 | 本田技研工業株式会社 | Dcブラシレスモータのロータ角度検出方法及びdcブラシレスモータの制御装置 |
| DE602004020349D1 (de) * | 2004-10-28 | 2009-05-14 | Abb Oy | Verfahren zum Schätzen der Rotorgeschwindigkeit und Position einer Permanentmagnetsynchronmaschine |
| US7088077B2 (en) * | 2004-11-09 | 2006-08-08 | General Motors Corporation | Position-sensorless control of interior permanent magnet machines |
| KR100645807B1 (ko) * | 2004-12-06 | 2007-02-28 | 엘지전자 주식회사 | 모터 기동 제어장치 및 그 방법 |
| JP4589093B2 (ja) * | 2004-12-10 | 2010-12-01 | 日立オートモティブシステムズ株式会社 | 同期モータ駆動装置及び方法 |
-
2005
- 2005-08-16 JP JP2005235720A patent/JP4425193B2/ja not_active Expired - Fee Related
-
2006
- 2006-08-14 CN CNB2006101149292A patent/CN100499351C/zh active Active
- 2006-08-14 CN CN2009101354892A patent/CN101534088B/zh active Active
- 2006-08-14 US US11/503,247 patent/US7245104B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2851524A1 (en) | 2013-09-20 | 2015-03-25 | Panasonic Corporation | Power generation control system, power generation apparatus, and control method for rankine cycle system |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101534088B (zh) | 2012-04-18 |
| CN1917356A (zh) | 2007-02-21 |
| US7245104B2 (en) | 2007-07-17 |
| US20070040528A1 (en) | 2007-02-22 |
| JP2007053829A (ja) | 2007-03-01 |
| CN101534088A (zh) | 2009-09-16 |
| CN100499351C (zh) | 2009-06-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4425193B2 (ja) | モータの位置センサレス制御装置 | |
| JP4480696B2 (ja) | モータ制御装置 | |
| JP4198162B2 (ja) | モータ制御装置 | |
| JP4413185B2 (ja) | モータの駆動制御装置 | |
| JP4687846B2 (ja) | 同期電動機の磁極位置推定方法および制御装置 | |
| JP4895703B2 (ja) | モータ制御装置 | |
| JP4059039B2 (ja) | 同期電動機の制御装置 | |
| JP5761243B2 (ja) | モータ制御装置および磁極位置推定方法 | |
| JP6324627B2 (ja) | 交流回転機の制御装置および電動パワーステアリングの制御装置 | |
| JP4383442B2 (ja) | モータ制御装置及びモータ駆動システム | |
| JP5351859B2 (ja) | ベクトル制御装置、及び電動機制御システム | |
| JP2007097263A (ja) | 同期モータの磁極位置推定方法 | |
| JP2010051078A (ja) | モータ制御装置 | |
| JP4972135B2 (ja) | モータ制御装置 | |
| JP6015486B2 (ja) | 同期電動機の可変速制御装置 | |
| JP5428202B2 (ja) | 永久磁石形同期電動機の制御装置 | |
| JP5321792B2 (ja) | 永久磁石形同期電動機の制御装置 | |
| JP2015136237A (ja) | 回転電機制御装置、回転電機制御方法、及び制御マップの作成方法 | |
| JP2008220096A (ja) | 同期電動機のセンサレス制御装置 | |
| JP5543388B2 (ja) | 永久磁石同期電動機の制御装置 | |
| JP5493536B2 (ja) | 電動機の制御装置 | |
| JP4425091B2 (ja) | モータの位置センサレス制御回路 | |
| JP2010166638A (ja) | 回転電機の制御装置 | |
| JP2008220169A (ja) | モータ制御装置 | |
| JP7196469B2 (ja) | 同期リラクタンスモータの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090625 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090709 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090721 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090918 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091110 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091208 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4425193 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121218 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131218 Year of fee payment: 4 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: R3D03 |
|
| LAPS | Cancellation because of no payment of annual fees |