JP3930394B2 - ディジタル形保護制御装置 - Google Patents
ディジタル形保護制御装置 Download PDFInfo
- Publication number
- JP3930394B2 JP3930394B2 JP2002229102A JP2002229102A JP3930394B2 JP 3930394 B2 JP3930394 B2 JP 3930394B2 JP 2002229102 A JP2002229102 A JP 2002229102A JP 2002229102 A JP2002229102 A JP 2002229102A JP 3930394 B2 JP3930394 B2 JP 3930394B2
- Authority
- JP
- Japan
- Prior art keywords
- control
- protection
- bus
- control device
- digital
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

























Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02H—EMERGENCY PROTECTIVE CIRCUIT ARRANGEMENTS
- H02H1/00—Details of emergency protective circuit arrangements
- H02H1/0061—Details of emergency protective circuit arrangements concerning transmission of signals
Landscapes
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Emergency Protection Circuit Devices (AREA)
- Remote Monitoring And Control Of Power-Distribution Networks (AREA)
- Supply And Distribution Of Alternating Current (AREA)
Description
【発明の属する技術分野】
本発明は、変電機器本体の交流電気量を検出し、ディジタル値で出力を行うディジタル形センサユニットと変電機器本体を操作する機器制御装置とを通信手段で結合したディジタル形保護制御装置に関する。
【0002】
【従来の技術】
従来の変電所内保護制御システムを図25に示す。近年の通信およびディジタル技術の発展に伴い、変電所における保護制御システムにおいても、ディジタル演算プロセッサおよび通信手段を適用した装置が、一部に適用されている。
図25において、一点鎖線の枠で示すZ1は変電所の制御本館であり、遠方制御所との情報の中継を行う遠方監視制御装置Z2、変電所全体の監視制御を行う集中監視制御装置Z3および送電線等の回線単位に設置される回線制御装置Z5−1〜Z5−nがステーションバスZ7(LAN等のシリアル伝送バス)で結合されており、更に各回線制御装置Z5−1〜Z5−nには、後述する各変電機器本体Z8−1〜Z8−nの保護を行うための保護装置Z6−1〜Z6−nが接続される構成となっている。なお、便宜上、遠方監視制御装置2および集中監視制御装置Z3を合わせて単に監視制御装置Z4と呼ぶことにする。
【0003】
変電機器本体Z8−1〜Z8−nと回線制御装置Z5−1〜Z5−nおよび保護装置Z6−1〜Z6−nとは現場制御装置Z9−1〜Z9−nを介して接続される。変電機器本体Z8−1は送電線設備の例であり、電流変成器Z10、電圧変成器Z11、遮断器、断路器等の開閉器Z12、母線Z13および送電線Z14から構成されている。
電流変成器Z10、電圧変成器Z11、開閉器Z12および現場制御装置Z9−1は、アナログ技術を適用した装置であり、変電機器本体Z8−1と現場制御装置Z9−1間の接続および現場制御装置Z9−1と回線制御装置Z5−1あるいは保護装置Z6−1間の接続は、情報量に応じた電気ケーブルZ15、Z16が使用されている。
遠方監視制御装置Z2、集中監視制御装置Z3、回線制御装置Z5−1〜Z5−nおよび保護装置Z6−1〜Z6−nには、ディジタル演算プロセッサを適用したディジタル形装置が適用されており、各装置間の情報伝送には通信手段を適用したステーションバスZ7を使用しているが、回線制御装置Z5−1と保護装置Z6−1間の接続は、接点によるインターフェース方式が多く、接続媒体としては情報量に応じた電気ケーブルZ17が使用される場合が多い。
【0004】
従来の回線制御装置Z5−1〜Z5−nのハードウェアは、電流または電圧の交流電気量を取り込み、アナログ入力のフィルタ処理およびA/D変換する電子回路で直接扱えるレベルの電圧値および電流値へ変成する入力変換器ユニット、接点入力回路を実装する入力ユニット、接点出力を実装する出力ユニット、交流電気量のディジタル変換等の処理を行うアナログ入力ユニット、制御機能の処理を行う演算ユニット、伝送処理を行う通信ユニッおよび各ユニットへ電源を供給する電源ユニットから構成されている。
保護装置Z6−1〜Z6−nについても同様にして電流または電圧の交流電気量を取り込み、電子回路で直接扱えるレベルの電圧値および電流値へ変成する入力変換器ユニット、接点入力回路を実装する入力ユニット、接点出力を実装する出力ユニット、交流電気量のディジタル変換等の処理を行うアナログ入力ユニット、保護機能の処理を行う演算ユニット、伝送処理を行う通信ユニットおよび各ユニットへ電源を供給する電源ユニットから構成されている。
また、前記の入力ユニットおよび出力ユニットは必要点数に応じて複数ユニットを実装する方式としている。従って、入出力にかかわるユニットが大半を占める構成となっている。
【0005】
以上、述べたように、従来の保護制御システムでは、変電機器本体およびこれを保護・制御する保護制御装置間の情報伝送に電気ケーブルを使用したアナログ情報を適用することから、比較的大きな電圧、電流を扱う接点入力回路、接点出力回路が必要となっていた。また、多量の電気ケーブルを処理するスペースが必要であり、専用の独立した筐体へ保護および制御ユニットを収納する必要があるため、装置の設置スペース増大の要因となっていた。
【0006】
従来システムにおける上記課題を解決するため、図26に示すシステム構成及びその構成ユニットを変電機器本体に組み込むか又は近傍へ設置する構成を案出した(特許出願:特許願2001年第033833号)。
同図において、Z1は変電所等の制御本館を示し、その内部には遠方制御所との情報の中継を行う遠方監視制御装置Z2と変電所全体の監視制御を行う集中監視制御装置Z3から構成される監視制御装置Z4を設置している。
そして、これら遠方監視制御装置Z2および集中監視制御装置Z3はステーションバスZ7により結合されると共に、後述する変電機器保護制御システムZ20−1〜Z20−n内の保護制御ユニットZ23−1と結合するように構成されている。保護制御ユニットZ23−1は回線制御ユニットZ21−1と保護ユニットZ22−1から構成され、より詳細には、回線制御ユニットZ21−1と保護ユニットZ22−1がそれぞれステーションバスZ7に接続している。
【0007】
変電機器保護制御システムZ20−1〜Z20−nはそれぞれ変電所内で送電線の回線単位もしくは図示していない母線連絡回線、母線区分回線、もしくは図示していない変圧器回線の1次、2次、3次側などに設置されており、以下述べるような変電機器本体(主回路機器とも言う)、電気量検出器としての計器用変成器およびその他各種要素から構成されている。
【0008】
変電機器本体の例として、ガス絶縁開閉装置(GIS)の送電線回線を例示している。なお、変電機器保護制御システムの構成は各回線とも類似の構成なので、変電機器保護制御システムZ20−1を用いて当該構成を説明し、他のユニットの説明を省略する。
変電機器本体は、母線Z24、遮断器、断路器、接地開閉器等の開閉器Z25および送電線Z26から構成されている。この各変電機器本体に流れる交流電流および印加されている交流電圧は所定の部位に設置された計器用変成器(または電気量検出器と呼ぶ)Z27により抽出され、この抽出されたアナログ電気量はセンサーユニット(SU)Z28に入力されてアナログ/ディジタル変換された後、ディジタルデータとして出力される。
【0009】
通常、センサーユニットZ28は複数台あり、これらから出力された複数のディジタルデータはディジタルデータ統合ユニット(MU)Z31で統合され、必要に応じて補正処理等を行い、プロセスバス(LAN等のシリアル伝送バス)Z29に送信され、更に前記回線制御ユニットZ21−1および保護ユニットZ22−1に取り込まれ、ここで変電機器本体の監視、制御および保護の演算に用いられる。
これら回線制御ユニットZ21−1および保護ユニットZ22−1あるいは制御本館の集中監視装置Z3から変電機器本体に対する制御指令(いわゆる下り情報)はそれぞれプロセスバスZ29を経由して機器制御装置(CMU)Z30で受信され、機器制御装置Z30によって変電機器本体の監視、制御および開閉器Z25に対する遮断指令等が出される。
【0010】
このシステム構成では、従来技術における現場制御装置(図25の符号Z9−1〜Z9−n)を廃止したので、それに伴い現場制御装置に実装されていた機能を、回線制御ユニットZ21−1、センサーユニットZ28および統合ユニットZ29、さらに機器制御装置Z30等へ分散させている。
以上のシステムでは、変電機器本体の駆動回路および電流、電圧変成器回路を含め、システムを構成するほとんど全ての回路、装置をディジタル化でき、アナログ技術の場合よりも電気ケーブルを大幅削減した通信手段で結合できる。また、ディジタル化及び通信手段のみで結合できるシステムを小さくでき、変電機器本体に直接組み込むか又は近傍設置することができる。
【0011】
【発明が解決しようとする課題】
ここで、保護制御性能の確保を容易にするために、図26の符号ZZで示す部分において前記通信手段29の一部又は全部をパラレルバス化して、ディジタルデータ統合ユニットZ31(或いはセンサユニットZ28)、保護制御ユニットZ23−1、及び機器制御装置Z30の通信手段と結合することができる。
変電所内保護制御システムに対し、保護制御性能をさらに向上させていくために、具体的な種々の機能及び処理構成が必要である。
上記に鑑み、本発明は、機器内でのデータ送受を効率よく行うことで、保護制御性能を向上させるディジタル形保護制御装置を提供することを目的とする。
【0012】
【課題を解決するための手段】
(1)上記の課題を解決するため、本発明に係るディジタル形保護制御装置は、変電機器本体の主回路の交流電気量を検知する単一または複数のセンサーユニットからの出力を通信手段により入力し、デジタルデータとして統合するディジタルデータ統合手段と、前記ディジタルデータ統合手段から出力されるディジタルデータに基づいて、前記変電機器本体の保護および制御の少なくともいずれかを行う制御信号を出力する保護制御手段と、前記変電機器本体を制御する単一または複数の機器制御装置から出力された機器監視データを前記保護制御手段へ、前記保護制御手段から出力された制御信号を前記機器制御装置へと通信手段により送信する機器制御装置用通信手段と、前記保護制御手段、前記機器制御装置用通信手段、前記ディジタルデータ統合手段の少なくとも一部と装置外部のプロセスバスとの間でデータを中継するプロセスバス通信手段と、前記ディジタルデータ統合手段、前記保護制御手段、前記機器制御装置用通信手段、前記プロセスバス通信手段間の少なくとも一部を結合するパラレル伝送媒体と、を具備し、前記ディジタルデータ統合手段、前記保護制御手段、前記機器制御装置用通信手段、前記プロセスバス通信手段間の少なくとも一部でのデータ送受をマルチマスター方式により行うことを特徴とする。
【0013】
ディジタルデータ統合手段、保護制御手段、機器制御装置用通信手段、プロセスバス通信手段の内で特定の手段にデータバス処理(マスター処理)を偏らせると、バス処理負荷が大きくなり、全体機能の時間性能及び時間強調が保てなくなる場合がある。また、この特定の手段の不良で、装置内のデータ送受が損なわれる危険性もある。
マルチマスター方式の伝送とすることで、各手段が独立してデータ送受でき、通信の負荷のアンバランスを低減できる。
マルチマスター方式とは、データバスに接続した2つ以上の手段がある場合、両手段ともバス制御権を獲得でき、バス制御権を獲得した方が通信のマスター(親局)となり、バス制御権を獲得していない通信相手がスレーブ(子局)となる。マスター側はスレーブ側にデータ送受(データのライトアクセス及びリードアクセス)することができるが、スレーブ側からマスター側へはデータ送受(データのライトアクセス及びリードアクセス)することを制限又は禁止する方式である。
なお、保護及び制御のリアルタイム性能が要求されるデータ送受部分(例えば変電機器本体の主回路交流電気量の瞬時値データ送受部分や保護リレーによる事故検出時の開閉器への開閉指令の伝送ライン等)にパラレルバスを適用することで、時間性能を確保できる。ここで、装置内の全手段間をパラレルバスで接続してもよいことは言うまでもない。
【0014】
(2)ここで、前記ディジタルデータ統合手段、前記保護制御手段、前記機器制御装置用通信手段、前記プロセスバス通信手段間のデータ送受の少なくとも一部を前記マルチマスター方式に換えて、シングルマスター方式で行ってもよい。
シングルマスター方式はバス制御権を固定化する。すなわち、マスターとスレーブの関係が固定化されている伝送方式である。例えば、プロセスバス通信手段、ディジタルデータ統合手段、機器制御装置用通信手段のいずれか1つがマスターとなり、他はすべてスレーブとする。
上記手段間の各データ送受は、マスタが制御し、スレーブ間のデータ送受も一旦、マスターで取り込み、スレーブに送受する通信形態となる。
【0015】
シングルマスター方式は、バス処理負荷がマスターとなる手段の処理能力上、問題ない限り適用できる。シングルマスター方式を適用することで、時間協調が安定する。また、バス制御を1箇所で行うため、バス調停機能が不要となり、ハードウエアを簡素化できる。さらに、バスの不良モードも単純になるため、バス監視も容易になる。
なお、保護及び制御におけるリアルタイム性能が必要なデータ送受部分(例えば変電機器本体の主回路交流電気量の瞬時値データ送受部分や保護リレーによる事故検出時の開閉器への開閉指令の伝送ライン等)にパラレルバスを適用することで、保護制御の時間性能を確保できる。ディジタルデータ統合手段、保護制御手段、機器制御装置用通信手段、プロセスバス通信手段の全てをパラレルバスで接続してもよいことは言うまでもない。
【0016】
(3)前記ディジタルデータ統合手段、前記保護制御手段、前記機器制御装置用通信手段、前記プロセスバス通信手段間及び該プロセスバス通信手段内の伝送バスを共通伝送方式のバスとし、該バスにブリッジを備えてもよい。
プロセスバス通信手段内のプロセスデータ送受信バスを共通バス方式とすることで、伝送タイミング等を変換する特殊な回路が不要となりバスブリッジの規模を小さくできる。
【0017】
ここで、プロセスデータは変電機器本体の主回路交流電気量、制御信号、監視情報等であり、ディジタル形保護制御装置に必要なデータは、この装置の保護区間及び制御・監視区間のプロセスデータのみである。よって、例えば、プロセスバス通信手段内にブリッジを設けると、不要なデータが保護制御手段、ディジタルデータ統合手段及び機器制御装置用通信手段間の伝送バスに流れることを防止でき、装置内のバストラフィック悪化を防止できる。
また、外部のルータ等でプロセスバス上のデータ伝送をブリッジし、ディジタル形保護制御装置に必要な保護区間及び制御・監視区間のプロセスデータ(プロセスバス上を流れるデータ)のみ取りこむ形態と比べて、前述のルータ等の外部機器が不要となり、システム構築のトータルコストの削減につながる。
【0018】
(4)前記ディジタルデータ統合手段、前記保護制御手段、前記機器制御装置用通信手段、前記プロセスバス通信手段の少なくとも一部の手段が、データを記憶する記憶部であって、該少なくとも一部の手段間のバス記憶空間に割り付けられた記憶部を備え、かつ該少なくとも一部の手段間のデータ送受を該割り付けに従い該記憶部渡しで行われてもよい。
記憶部を備えた手段間のアプリケーションプログラムソフトは、前記手段間を接続する伝送バスの存在を意識せずに、記憶空間(いわゆるメモリマップ)上でのデータ渡しが可能になる。よって、データ送受に関するアプリケーションプログラムソフトを簡素化できる。
【0019】
(5)前記センサーユニットに交流電気量のサンプリング検出をさせるためのサンプリング信号の略整数倍の周期の保護リレー演算用基準信号に基づき、前記保護制御手段が保護リレー演算を行ってもよい。
保護制御手段、ディジタルデータ統合手段、機器制御装置等を個別にシリアル伝送媒体であるプロセスバスで結合させた場合、通常、プロセスバスはLAN形態となり各装置及び各手段の動作は互いに非同期となる。そのため、各装置及び各手段間の協調が難しく、保護及び制御の時間性能を確保(保護リレーや変電機器の状態値への時刻付け及び上位系への情報伝送に関する時間性能等)することに支障を生じる場合もある。
保護制御手段、ディジタルデータ統合手段、プロセスバス通信手段及び機器制御装置用通信手段間の少なくとも一部をパラレルバスで接続している。そのため、パラレルバスで接続した手段間で、データ取り込みと演算タイミングの協調を図ることができる。また、保護演算時間を管理するために必要な基準信号(センサユニットでのサンプリングに同期し、整数倍させた基準信号)を容易に配信し、共用化することが可能である。
【0020】
ここで、ディジタル形保護制御装置が、前記サンプリング信号を生成するための基準信号に同期する時刻同期用基準信号および保護リレー演算用基準信号を生成する手段をさらに具備し、前記変電機器本体の制御の少なくとも一部は該時刻同期用基準信号に、前記変電機器本体の保護の少なくとも一部は前記保護リレー演算用基準信号にそれぞれ同期して行われてもよい。
同期タイミングの異なる保護機能及び制御機能を適切に動作させることが可能となる。即ち、保護機能に必要な同期用の基準信号及び制御機能に必要な同期用の基準信号を1装置内で配信、共用することが可能となり、保護の時間性能、制御の時間性能を確保して独立して動作できる。このため、例えば、保護機能が万一、不良で機能維持できない場合でも、独立して動作する制御機能を喪失しない。この逆も同様である。
【0021】
(6)前記保護制御手段が所定の周期で前記制御信号を送信し、前記機器制御装置が前記制御信号を受信したタイミングに基づき前記変電機器本体の監視を行ってもよい。
ディジタル形保護制御装置と機器制御装置が分離している場合でも両者間で同期をとることができる。また、ディジタル形保護制御装置と機器制御装置間で同期信号だけを配信する専用ケーブルを設ける必要がなくなる。
【0022】
ここで、前記保護制御手段が前記所定の周期で送信される前記制御信号に周期的に識別データを付加し、前記機器制御装置は受信した前記制御信号への識別データの付加の有無に対応してタイミングを生成し、前記タイミングにより前記変電機器本体の制御が行われてもよい。
具体的には、ディジタル形保護制御装置は前記時刻同期に必要な周期よりもオーバサンプリングで前記制御信号を巡回式に伝送し、前記時刻同期に必要な周期毎に前記制御信号に識別データを付加し、前記機器制御装置は前記制御信号の受信タイミングで前記識別データを判別し、変電機器状態イベントの時刻同期をとることができる。
時刻同期よりもオーバサンプリングで巡回式に制御指令を機器制御装置に送信するため、事故検出時、開閉器への高速開閉指令を可能にしつつ、合わせて、機器制御装置に時刻同期をとらせることも可能となる。
【0023】
(7)前記機器制御装置への制御信号を可動形又は静止形リレー部でON/OFF出力し、前記機器制御装置からのデータ入力を絶縁形入力部でON/OFF入力してもよい。
変電機器の保護制御システムにおいて、前記機器制御装置のインターフェースがディジタル化対応していない場合(従来の機器制御装置)でも、ディジタル形保護制御装置とメタルワイヤ等で接続することで、情報伝送(制御指令含む)することが可能である。
変電所(又は電気所)構内伝送がすべてディジタル化するためには移行期間があり、変電機器の増設やリプレース等でディジタル伝送による通信に置き換わっていく。ディジタル形保護制御装置を従来機器制御装置と接続可能であるため、このような移行時期での適用に有効である。
【0024】
(8)前記機器制御装置への制御指令を可動形又は静止形リレー部でON/OFF出力し、前記機器制御装置からのデータ入力を絶縁形入力部でON/OFF入力する外部の入出力装置と通信手段で結合し、前記入出力装置を中継して前記機器制御装置とデータ送受してもよい。
従来形機器制御装置とディジタル形保護制御装置の伝送接続を外部入出力装置で中継して接続できる。ディジタル化への移行の過渡期において、機器制御装置が従来形の場合は、本入出力装置で中継接続するシステム構成とし、ディジタル化への移行が完了した時点には、入出力装置を取外すことで、再接続できる。
ここで、ON/OFF入出力はDC110Vクラスの強電部であるため、サージ耐圧等の関係上、大型にならざるを得ない。入出力装置をディジタル形保護制御装置と分離できるようにしておくことで、ディジタル形保護制御装置の大きさには実質的な影響を与えないようにすることができる。即ち、入出力装置が大型化しても分離しているため、スペースを確保できる場所に設置するという自由度を有する。
【0025】
(9)ディジタル形保護制御装置の少なくとも一部を光伝送部で構成し、前記光伝送部に所定の条件により送風を行う送風手段をさらに具備してもよい。
これにより、電気及び電子部品と比較し、故障率が高い光伝送部品の故障率低減が可能になる。
特に、ディジタル形保護制御装置を変電機器本体又は近傍に装備する場合及び屋外ハイム等に備える場合、又は変電機器から離れた屋内制御室等に設置する場合でも室内温度を調整する空調設備を有していない場合、特に有効である。但し、前述の空調のある室内に設置した場合でも効果があることは言うまでもない。設置環境による相対的な効果の差異があるだけである。
また、例えば、設置環境の周囲温度に応じて、送風を制御するようにすると、送風手段の常時連続運転を避け、送風手段の磨耗劣化を遅らせることができる。さらに、光伝送部に送風による強制空冷が効率的になされるように、送風通風路を確保するため、送風効果を阻害しない。
【0026】
(10)前記ディジタル形保護制御装置から前記機器制御装置への制御信号を複数ビットで構成される所定のルールに基づくコマンドとし、前記コマンドを受信した前記機器制御装置が前記コマンドのエラーを検出してもよい。
ディジタル形保護制御装置と機器制御装置間を1対1のメタルワイヤで接続した場合、制御指令は複数のON/OFF接点で電気渡しするため、制御指令の数だけ、ON/OFF部及びメタルワイヤが必要となることが考えられる。
これに対して、複数ビットですべての制御指令をコマンドとして表現することで、送信通信路1本で機器制御装置に情報伝送が行える。
ここで、多くの情報を伝送する場合に通信品質を保つことが重要になる。通信媒体の品質に関してはノイズに強いマンチェスタ符号伝送やエラーチェック符号又はシーケンスを設ける等の対策で対処可能である。しかし、エラーチェック符号を生成する前段階で信号品質の不良が発生した場合は、不良信号がそのまま機器制御装置に伝送され、受信側で信号の不良をチェックできず、制御出力の誤動作、誤不動作につながる恐れがある。
これを防止するため、ディジタル形保護制御装置からの制御指令は所定のルールに基づくコマンドとし、末端の受信側である機器制御装置で前記ルールに基づくコマンドであることを確認し、コマンドにエラーがないかを判定する。この一連の処理により、制御指令伝送のデータ品質を保つことができる。
【0027】
(11)ディジタル形保護制御装置から機器制御装置への制御信号をプロセスバスを経由して伝送される複数ビットで構成される所定のルールに基づくコマンドとし、前記機器制御装置で前記ディジタル形保護制御装置又はプロセスバス上の通信手段の不良により発生したコマンドのエラーを検出し、制御信号の誤りに起因する誤動作又は誤不動作を防止してもよい。
ディジタル形保護制御装置から機器制御装置への制御指令はプロセスバスを介して伝送され、その間にはルータやHUB等の通信中継機器も存在できる。
このため、機器制御装置でコマンドのエラーを検出することで、制御指令の送信元から最終末端の受信元(機器制御装置)までの一環した制御指令のデータ品質を保つことが可能となる。
【0028】
(12)前記保護制御手段を保護単独の手段又は制御単独の手段として、保護機能と制御機能を装置分離してもよい。
機能を分離することで、保護と制御の独立性が完全に保たれる。この場合、保護装置及び制御装置各々に必要に応じて、プロセスバス通信手段、機器制御装置用通信手段、ディジタルデータ統合手段との伝送を可能とすることができる。
【0029】
【発明の実施の形態】
以下、本発明の実施形態について図面を参照して説明する。
(第1の実施形態の構成)
図1は、本発明に係わるディジタル形保護制御システムの第1の実施形態を示す構成図である。
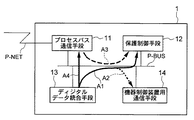
図1に示すディジタル形保護制御装置1は、ディジタルデータ統合手段13、保護制御手段12、機器制御装置用通信手段14、プロセスバス通信手段11から構成され、かつディジタルデータ統合手段13、保護制御手段12、機器制御装置用通信手段14、プロセスバス通信手段11の各手段間の全部をパラレル伝送媒体P−BUSで結合し、ディジタルデータ統合手段13、保護制御手段12、機器制御装置用通信手段14、プロセスバス通信手段11間のディジタルデータ送受、のうちの全部又は一部をマルチマスター方式としている。
【0030】
ディジタルデータ統合手段13は、電気所に設置された母線X11を有する変電機器本体X1の主回路交流電気量(a1、a2:本来、符号a1〜anまであるが、図1では説明上、符号a1,a2の矢印のみ図示。符号a1は送電線X13設置の電流変成器X13aで抽出した電気量。また、符号a2は送電線X12設置の電流変成器X13bで抽出した電気量を例示)を入力してディジタルデータに変換し、出力するセンサーユニット2−1〜−2−nに対し、これらのセンサユニットのディジタルデータ出力を1対1伝送路SC(例えば、1本の通信路でシリアル送受信を行う半2重通信路又は送信及び受信で各々1本の専用線を割り当てる全2重通信路)により入力し、前記ディジタルデータを統合する。
【0031】
保護制御手段12は、ディジタルデータ統合手段13から出力されるディジタルデータを入力して変電機器本体X1の監視、制御及び保護を行うとともに、上位系の監視制御装置とステーションバスS−NETを介して通信する。
機器制御装置用通信手段14は、変電機器本体X1の制御を行う機器制御装置3−1〜3−nから1対1伝送路CC(例えば、1本の通信路でシリアル送受信を行う半2重通信路又は送信及び受信で各々1本の専用線を割り当てる全2重通信路)により機器監視のディジタルデータb1(本来、遮断器X14、断路器及び接地開閉器等が複数台あるため、符号b1〜bnまであるが、図1では説明上、符号b1のみ図示)を入力して保護制御手段12に送信すると共に、保護制御手段12からの制御信号を中継して機器制御装置3−1〜3−nへ1対1伝送路CCにより送信する。
プロセスバス通信手段11は、保護制御手段12、機器制御装置用通信手段14、ディジタルデータ統合手段13、のうちの全部又は一部と前記電気所構内に敷設したプロセスバスP−NETとの間で送受するディジタルデータを中継する。
【0032】
尚、電流変成器X13a、X13bは、例えば、電子回路を有するセンサユニットにおいて、扱いやすい弱電信号(アナログ信号)又は光信号として、電気量を変換するために、ロゴスキコイルや光電流変成器を適用する方がセンサユニットの小型化、簡素化に都合がよい。しかし、本実施例がこれらの電流変成器は限定されるものではない。また、例示では電流変成器であるが、電圧変成器であってもよいことは言うまでもない。
【0033】
次に、ディジタル形保護制御装置1の設置例を示す。
図2は、GISの各変電機器本体のレイアウト(配置関係)の一例を示す図である。同図において、GISに対するセンサーユニット2−1、2−2、機器制御装置3−1〜3−4、ディジタル形保護制御装置1の配置と、それらとLAN(イーサネット(登録商標))等のシリアル伝送であるプロセスバスP−NET及びステーションバスS−NETとの接続関係を例示している。
【0034】
図2において、遮断器(CB)、断路器(DS)、接地開閉器(ES)、母線(BUS)等の主回路機器を絶縁ガスと共に収納した金属容器(以下、タンクと称する)TAを、ベースB上に設置し、そして前記各タンクTA内の主回路機器の電気量検出部として計器用変成器を設け、アナログ出力信号を信号取り出し部近傍に設けたセンサーユニット2−1,2−2(図2中のVT,CT部分)より、ディジタルデータに変換するようにしている。
同様に、遮断器(CB)、断路器(DS)、接地開閉器(ES)等開閉器の開閉情報(ON、OFF情報)やガス密度、油圧等も別の機器制御装置3−1〜3−4により、ディジタル処理し易い信号に変換するようにしている。
【0035】
そして、これらのセンサーユニット2−1,2−2の出力端子は、ディジタル形保護制御装置1内のディジタルデータ統合手段13に接続されている。このディジタル形保護制御装置1はプロセス制御箱7内に収納されてる。更にディジタル形保護制御装置1は制御本館から延在するステーションバスS−NETと結合するように構成されている。
【0036】
ここで、図2では前記プロセス制御箱7を、前記GISのタンクTAを載置するベースB上に一体的に設けているが、前記タンクTA外周部に直接取り付けるようにしてもよい。このように、GISのベースBやタンクTAにプロセス制御箱7を設置する形態を示している。
また、プロセス制御箱7を前記GISのベースBから離れた場所、すなわち、従来の制御本館よりも変電機器に近い場所に設置する形態でも良い。いずれにしても従来の制御本館に設置しないため、制御本館を極めて小さくできる。但し、制御本館にディジタル形保護制御装置を設置しても良いことは言うまでもない。
尚、変電機器本体の例としてGISを挙げたが、後述するように、タップ付き変圧器、その他電力機器であっても構わない。
【0037】
ここで、図1に記載の各手段について補足説明する。
・ プロセスバス通信手段11の補足説明
プロセスバス通信手段11は、保護制御手段12、ディジタルデータ統合手段13、機器制御装置用通信手段14とプロセスバスP−NETとの間のインターフェ−スである。変電所内構内伝送が国際的に標準化する方向にあるが、これが標準化された場合、本実施形態のディジタル形保護制御装置1の各手段とプロセスバスP−NET上との通信のため、標準化された伝送とディジタル形保護制御装置1内部の伝送を中継するため、伝送のプロトコル変換やフォーマット変換を行う。これにより、標準化されたプロセスバス上に本実施形態のディジタル形保護制御装置1を接続しても異メーカ間伝送のマルチベンダ化に対応できる。尚、マルチベンダ化を行はない場合はオリジナル伝送を中継する。また、本手段はプロセスバスがLAN等のシリアルバスである場合、ディジタル形保護制御装置1内にパラレルバスとして導入するため、シリアルデータをパラレルデータに変換する機能を備えることは言うまでもない。
プロセスバスP−NETを使ったデータ送受は主に、母線保護や変圧器保護のために必要な他ベイ(変電機器本体(送電線含む))から抽出した交流電気量のディジタルデータや母線保護、変圧器保護での他ベイへのトリップ信号である。
【0038】
・保護制御手段12の補足説明
保護制御手段12は変電機器本体の主回路交流電気量の時系列ディジタルデータから保護リレー演算により、保護区間の事故判別を行い、事故を検出した場合、該当遮断器等にトリップ指令(制御指令)を出力する。尚、時系列ディジタルデータはディジタルデータ統合手段13から取り込む。
また、上位系からの機器選択及び制御を中継処理し、遮断器や断路器に選択及び制御指令を出力する。この制御指令は機器制御装置用通信手段14を介して、機器制御装置3−1〜3−nの中の該当する装置へ通信路で伝送する形態となる。
さらに、機器制御装置3−1〜3−nの機器状態イベント(又は機器状変とも言いい、変電機器の油圧、ガス圧、遮断器等の開閉等の事象)を機器監視データとして機器制御装置用通信手段14経由で取り込み、必要に応じて上位系に伝送する。機器監視データには必要に応じて状変時刻を付加する。上位系との伝送にはプロセスバスP−NETとは、通常、データ伝送分割されたステーションバスS−NETを使用する。
【0039】
・ ディジタルデータ統合手段13の補足説明
交流電気量のディジタルデータをセンサユニット2−1〜2−nから通信手段(例えば1対1のシリアル伝送路で全2重通信又は半2重通信。センサユニットを変電機器本体に近接置する場合は光通信が良い。電気ケーブル等の場合はマンチェスタ伝送等を適用し、耐ノイズ性向上を図る必要がある。)で取り込む。
この電気量は電流及び電圧のディジタル信号であり、保護制御単位にデータをまとめて、保護制御手段12に送信する。具体的には、センサーユニット内に例えば、保護用及び制御用にアナログフィルタ回路を有する場合、サンプリング毎に受信した電気量のディジタルデータの中から、制御に使う電気量データ(センサユニットの制御用フィルタを通した電気量)と保護リレー演算に使用する電気量データ(センサユニットの保護用フィルタを通した電気量)を取り出し、保護用電気量と制御用電気量にまとめる。
【0040】
後述するように保護制御手段12を保護手段121と制御手段122に分ける場合は、保護手段121に保護用にまとめたデータを送信し、制御手段122に制御用にまとめたデータを送信する。また、複数のセンサユニットからの電気量データを必要に応じて、保護制御単位にまとめる。保護制御単位間にまたがってデータをまとめる場合もある。
さらに、電流及び電圧のディジタル信号に対し、感度補正や位相補正処理を行い、保護制御手段12のための前処理を実施する。尚、本手段において、必要に応じて、電気量に時刻付けする場合もある。
【0041】
・ 機器制御装置用通信手段14の補足説明
機器制御装置3−1〜3−nと保護制御手段12及びプロセスバスP−NET上の機器との伝送において、そのデータ送受を中継する手段である。尚、プロセスバスP−NETとはプロセスバス通信手段11を介す。このデータ送受において、保護制御手段12から機器制御装置3−1〜3−nへは制御指令(事故検出及び選択制御による開閉器の開閉指令等)やプロセスバスP−NETを経由した親局からのトリップ信号等であり、逆は、機器制御装置3−1〜3−nの機器監視データである。機器の同期開閉やインターロック等を本手段で実施しても良い。
また、機器状変への時刻付けを必要に応じて本手段で実施する。
尚、機器制御装置3−1〜3−nと機器制御装置用通信手段14は通信手段(例えば1対1のシリアル伝送路で全2重通信又は半2重通信。センサユニットを変電機器本体に近接置する場合は光通信が良い。電気ケーブル等の場合はマンチェスタ伝送等を適用し、耐ノイズ性向上を図る必要がある。)で接続する。
【0042】
・ センサユニットの補足説明
センサユニットは電流検出手段や電圧検出手段と近接して設置する方が耐ノイズ性能上良い。これは2次出力が微小な電流検出手段や電圧検出手段と接続する場合とくに有効である。
電流検出手段としては、例えば、ロゴスキーコイルや鉄心型コアの変成器、ファラデー効果による光変換型電流センサーを使用する。また、電圧検出手段としては、容量分圧形や巻線形の計器用変圧器、ポッケルス効果による光変換型電界センサーなどを使用する。
センサユニットは電流検出手段や電圧検出手段からアナログ入力した変電機器本体の主回路交流電気量を所定のアナログフィルターで高調波除去(保護及び制御に不要な周波数成分の除去及びA/D変換データの折り返し誤差の除去)し、A/D変換して、所定の周期でディジタルデータ統合手段13へ通信手段により送信する。
【0043】
・機器制御装置の補足説明
機器制御装置は開閉器などのパレット接点(遮断器では、開閉ステータスや油圧スイッチ、ガス密度スイッチなどの接点情報)や監視センサのアナログ出力を取り込む。これらを機器監視データとして、機器制御装置用通信手段14に送信する。
また、機器制御装置用通信手段14経由で通信手段を介して受信する制御信号をデコードし、開閉機器の駆動部に制御出力する。例えば、制御出力とは、遮断器を例にとると、遮断コイル、投入コイルへの駆動信号、油圧ポンプのモータへの駆動信号の出力である。
【0044】
・ パラレルバスの補足説明
図26に示したように、変電所内伝送システムはLAN主体のシリアル伝送が有力である。これは、イーサネットLAN等が業界標準であり、国際的にも伝送の標準化に適しているため、マルチベンダ化しやすいこと、また、汎用LANはハードウエア及びアプリケーションともに標準化が確立されており、システム構築のコスト及び追加、変更の自由度も高いことが主な理由である。
【0045】
しかし、不必要にすべてをLAN等のシリアル媒体で結合することは伝送のリアルタイム性を損なうだけではなく、伝送品質のオーバスペックともなりシステムのコストアップとなる場合がある。特に、LANに適用されるプロトコル(例えば、TCP/IPやUDP)はオーバヘッドが大きい。すなわち、伝送フレームにプロトコル上の階層の取り決めがカプセル化されてフラグとして構成されているため、制御データ量が多く、またびアプリケーション負荷も重い。
また、LAN等ではある一定以上の伝送距離を想定して、差動信号等やマンチェスタ伝送など耐ノイズに強い伝送方式となっており、入出力はパルストランスで絶縁するなど、耐ノイズ対策も必要である。本来、隣接する装置や一つの装置内にすべての機能が収納できる場合に、わざわざLANを適用すことは、プロトコルによるオーバヘッドや耐ノイズ対策等で装置が大型化し、コストアップの要因になる。
そこで、本実施形態では、以上のようにLAN等のシリアル媒体にする必要ない手段間にはパラレルバスを適用し、特殊なプロトコル無しに伝送することで、データ伝送の高速化をはかり、保護及び制御に必要なリアルタイム性能を向上させている。
【0046】
(第1の実施形態での作用)
第1の実施形態では、パラレスバスP−BUS上で各手段間のうちの全部又は一部の間でバス伝送をマルチマスター方式で制御する。
マルチマスター方式で伝送する概念図(例)を図3、図4に示す。
図3、4に示す伝送(A1〜A4、B1,B2)はマスターとスレーブの関係を図示している。図3,4は以下の通りである。
【0047】
・ マスター側:ディジタルデータ統合手段13、スレーブ側:保護制御手段12、伝送方向A1
ディジタルデータ統合手段13は、センサユニットから入力したディジタルデータ(変電機器本体の主回路交流電気量をディジタル化したデータ)を必要に応じて補正処理(センシングユニット側のA/Dサンプリング時のマルチプレクサによる切替え時間ずれ補正及び電流変成器を含めた温度変動分の補正等)及び時刻付けし、補正後の電気量瞬時値データを保護制御手段12に送信する。
瞬時値データはリアルタイム性を有することから、保護制御手段12の動作状態によらず、優先して受信させる必要がある。よって、本例の瞬時値データ伝送では、ディジタルデータ統合手段13がマスターとなり、保護制御手段12がスレーブとすることが適している。
【0048】
・ マスター側:ディジタルデータ統合手段13、スレーブ側:機器制御装置用通信手段14、伝送方向A2
機器制御装置用通信手段14で変電機器側の同期開閉制御を行わせる。この場合、主回路交流電気量が必要となるため、これもリアルタイム性を確保させるため、ディジタルデータ統合手段13から優先して機器制御装置用通信手段14に受信処理させる。よって、本例の瞬時値データ伝送は、ディジタルデータ統合手段13がマスターとなり、機器制御装置用通信手段14をスレーブとすることが適している。
【0049】
・マスター側:ディジタルデータ統合手段13、スレーブ側:プロセスバス通信手段11、伝送方向A4
母線保護の場合、図1の例では、送電線X13、X14の電気量ディジタルデータを変電所内の母線保護装置にプロセスバスP−NET経由で送信する必要がある。この場合もリアルタイム性重視から、ディジタルデータ統合手段13から優先してプロセスバス通信手段11に受信処理させる。よって、本例のデータ伝送は、ディジタルデータ統合手段13がマスターとなり、プロセスバス通信手段11をスレーブとすることが適している。
【0050】
・ マスター側:プロセスバス通信手段11、スレーブ側:保護制御手段12、伝送方向A3
変圧器保護の場合、変圧器1次、2次側の交流電気量を差動演算して事故判定する。この場合、変圧器1次側に設置のディジタル形保護制御装置が変圧器2次側の電気量をプセスバスP−NET経由で取りこむ。これは、図3において、リアルタイム性確保の観点から、プロセスバス通信手段11で受信した電気量ディジタルデータを保護制御手段12に優先して受信処理させる。よって、本例のデータ伝送は、プロセスバス通信手段11がマスターとなり、保護制御手段12をレーブとすることが適している。
【0051】
・ マスター側:保護制御手段12、スレーブ側:機器制御装置用通信手段14、伝送方向B1
保護制御手段12では、保護リレー演算を行い、変電機器本体(母線、送電線含む)の事故を判定する。また、制御機能としては、上位系の監視制御装置からの制御指令に基づき、開閉器の開閉指令(制御信号)を中継する。保護及び制御ともに、開閉器の開閉指令(制御信号)を機器制御装置用通信手段14を経由して、機器制御装置3−1〜3−nに送信する。この制御信号は事故保護、制御の観点から、最優先指令であり、優先して機器制御装置用通信手段14に受信処理させる。よって、本例の制御信号(指令)の伝送は保護制御手段12をマスターとし、機器制御装置用通信手段14をスレーブとすることが適している。
【0052】
・ マスター側:保護制御手段12、スレーブ側:プロセスバス通信手段11、伝送方向B2
母線保護(親局)では、各回線の機器制御装置にトリップ指令を伝えるため、プロセスバスP−NET経由でトリップ信号を伝送する。トリップ信号は保護の観点から再優先であり、保護制御手段12からプロセスバス通信手段11に優先的に受信させ、プロセスバスP−NET上へ伝送する必要がある。よって、本例のトリップ信号の伝送は、保護制御手段12をマスターとし、プロセスバス通信手段11をスレーブとする。
【0053】
以上の例で述べたように、マスターとなる手段は固定でなく、伝送データにより、最適なマスターとなる手段が変わる。リアルタイム性は保護リレー及び制御性能(特に遠方制御時の伝送時間性能)上、重要であり、マルチマスター方式が最も優れている。
このマルチマスター方式では、同一バスに接続された複数の手段において、同時点で2つのマスターが存在することを通常は許されない。これは、2つのマスタが同一バスにアクセスした際にデータ衝突が発生するためである。
この場合は、バス調停機能が必要であり、同一バスに接続された代表の手段にバス調停機能を備えさせる。コスト的に許せば、バス調停のみ行う手段を同一バスに接続しても良い。
【0054】
同一バス上のある手段がマスターになる場合に、まずバス制御権をバス調停機能を有する手段に要求し、バス制御権を得て、初めてマスターとしてバスアクセスできる。この要求と許可は通常、同一バス上の専用信号ラインを使って、やり取りする。但し、バスにシリアルバスを採用した場合は、バス衝突を利用し、衝突検出時に一定の待ち時間を置き、再送するという方式で、バス制御権の要求、許可というバス調停機能によらずマルチマスターを実現する方法もある。
【0055】
尚、本実施例のパラレスバスP−BUSはシリアル通信ではなく、パラレルバス方式であるため、一度に多ビットデータを伝送できる。よって、高速伝送が可能であり、リアルタイム性の確保には大きな効果をもたらす。上記マスター、スレーブの関係において、データ伝送を共通のパラレスバスP−BUSで伝送することで説明しているが、パラレルバスを複数に分割して、例えば、2つの手段間の専用バス、3つの手段間の共通バスという組合せとしてもよい。また、高速性を要しないデータ(例えば、機器制御装置の低周期監視データ等)はディジタル形保護制御装置1内でもシリアル媒体により送受信させても良い。
【0056】
ここで、保護制御手段12について、補足する。保護制御手段12内の構成例を図5に示す。
図5では、保護手段(PU)121と制御手段(CU)122から構成されている。尚、電源等は記載上、省略している。保護手段121と制御手段122は互いに独立した構成になっており、ディジタル形保護制御装置1内で、各々、パラレルバスP−BUSとステーションバスS−NETに接続している。
これは、機能分離を意味し、各々が独立したディジタル演算プロセッサ、プログラム記憶部、入出力インターフェース部等を有している。これは信頼性を高める形態である。仮に、これらを共通とすると、共通部に万が一の不良が発生した場合、保護機能及び制御機能が共倒れする危険性がある。本形態では、これを回避できる。
【0057】
尚、この場合、保護手段121と制御手段121はハードウエアとしてプリント基板レベルで基板分離する形態(この場合、保護手段121内で機能別に複数基板で構成してもよい。制御手段122においても同様)、同一プリント基板上で、回路分離する形態、又は、保護手段121と制御手段122を収納ラックレベルで分離し、ラック間をパラレスバスP−BUS又はシリアル伝送バスで接続する形態もある。
【0058】
以上、保護手段121と制御手段122を互いに独立させると、信頼性は向上するが、反面、コストアップとなることから、適用する電圧階級や規模に応じて、信頼性とコストのバランスをとる必要がある。コスト重視であれば、共通部を多くすることで、対応できる。
【0059】
図1のディジタル形保護制御装置1内の接続例に対し、他の実施例を図6及び図7に示す。
図6では、図1のディジタル形保護制御装置1内と比較し、機器制御装置用通信手段14を共通のパラレルバスP−BUSではなく、保護制御手段12と専用のパラレルバスP−BUS1又は専用のシリアルバスS―BUSで接続している。
【0060】
ここでは、ディジタルデータ統合手段13から保護制御手段12への主回路交流電気量データをパラレルバスP−BUSで伝送し、機器制御装置3−1〜3−nへの制御指令(事故検出及び選択制御による開閉器の開閉指令等)を専用バスP−BUS1で伝送する。これにより、電気量データの伝送でバスが占有され、制御指令の伝送に待ち状態が入ることがないため、時間性能(保護リレーの事故応動及び選択制御の時間性能等)を向上させることができる。
【0061】
また、図7では、図6の構成に対し、保護と制御の独立性を向上させるため、保護手段121と制御手段122に分離し、保護手段121に専用パラレルバスP−BUS11又は専用シリアルバスS−BUS1を設け保護専用の機器制御装置用通信手段14aと接続し、制御手段122に専用パラレルバスP−BUS12又は専用シリアルバスS−BUS2を設け、制御専用の機器制御装置用通信手段14bと接続する構成である。これは、保護手段と制御手段の制御出力経路まで分離できるので、共通部の不良等で、保護及び制御が出力不能になることを防止できる。
【0062】
尚、図1と比較し、信頼性は高くなるが、図6は2つのバスが必要になるため、構造及びアプリケーションはやや複雑になる。また、図7は信頼性が極めて高くなるが、バスが3つ必要であること、機器制御装置用通信手段が保護と制御で個別に必要になること、さらに機器制御装置側に保護用及び制御用の通信路を設けることが必要になるため、ケーブル本数も増え、ハード規模も大きくなる。よって図1よりコストアップになる。
【0063】
図1、図6及び図7の構成は、適用する変電機器の電圧階級(高圧の基幹系になるほどコストより信頼性を通常重視する)やユーザ要求により選択することになる。
【0064】
次に、ディジタル形保護制御装置の装置構成例を図8及び図9示す。
図8は1台の収納ラック1Cにすべての手段を収納したものである。プロセスバス通信手段11の機能を有するプリント基板、保護制御手段12の機能を有するプリント基板、ディジタルデータ統合手段13の機能を有するプリント基板、機器制御装置用通信手段14の機能を有するプリント基板及びこれらをバス接続するバッグボードとして構成したパラレルバスP−BUSを収納ラック1Cに収納している。尚、電源は図示上、省略している。
【0065】
但し、図8は、収納ラック1Cに収納するプリント基板枚数を指定するものではなく、この手段が複数枚のプリント基板で構成してもよい。また、同一機能を有する手段を複数枚収納し、たとえば、距離リレー用保護制御手段、PCM用保護制御手段というように用途別に複数枚収納してもよいことは言うまでもない。また、各手段を各々基板分離する必要もなく、例えば、1枚のプリント基板上に各手段の機能を有する回路を収納してもよく、この場合、同一基板上の回路内で、パラレルバスP−BUSを備える構成になる。いすれにしても。図1に記載のディジタル形保護制御装置1内の構成は機能構成であり、物理的な構成や個数を限定するものではない。
【0066】
一つのカスタムモジュール又はLSIに各手段の全部又は一部を収納し、このカスタムモジュール又はLSI内部でパラレルバスをLSI内配線パターン等で構成しても差し支えない。
現在の電子回路、高密度実装技術では、一つの小型の収納ラックにディジタル形保護制御機能を収納することが可能であり、図2に示す変電機器本体のプロセス制御箱7に収納できる。
【0067】
また、変電機器本体への組込み形ではなく、近傍のハイムや別館の制御室等に盤として設置することも可能である。図8では、デイジィタル形保護制御盤DX−Aが相当し、ディジタル形保護制御装置1a〜1f(台数に制約はない)を収納した例である。変電機器本体に組み込まない場合は、複数ある他ベイの変電機器本体を保護制御する各々のディジタル形保護制御装置を1つの盤に集中収納させることができる。
この場合、ディジタル形保護制御盤DX−Aと各ベイの変電機器本体に設置した機器制御装置3−1〜3−n及びセンサユニット2−1〜2−nと接続する伝送媒体(例えば、ケーブル本数を削減するためにシリアル伝送媒体を適用。尚媒体は、光又は電気ケーブルであるが、耐ノイズ環境から光ケーブルが適している。耐ノイズ環境上、許容できれば電気ケーブルでもよい。)を敷設する形態となる。
【0068】
この形態の利点は、変電機器本体から離れたどのような場所にも設置できるため、耐環境性能(温度、湿度、ノイズ等)上、厳しくないクリーンな場所に設置することもでき、ディジタル装置であるディジタル形保護制御装置1a〜1fの品質、耐寿命の観点から優れている。
尚、このことは、図2に示す変電機器本体のプロセス制御箱7に直接収納することを否定するものではなく、耐環境性能上、許容できる場合は当然、本体組み込み形態とすべきである。別盤を建てる手間、コストおよび現地据付試験等が省けるため、トータルコスト上は本体組み込みが最も低コスト形態となる。
【0069】
上記盤構成例の変形を図9に示す。ディジタル形保護制御装置1内の各手段を独立した収納ケースに収めた形態が同図の符号CASE―A部分である。この場合も、各ラック間のうち、全部又は一部を盤内パラレルバスP−BUSで接続することになる。
ここで、保護制御手段12を独立したラックに収納した符号CASE−B1部分のような形態もある。
また、同図のCASE−B2はディジタルデータ統合手段13と機器制御装置用通信手段14及びプロセスバス通信手段11とこれらを接続するパラレスバスP−BUSを収納した形態である。ここで、CASE−B1部分とCASE−B2部分は、ラック外部の盤内パラレルバス又はシリアルバス(このシリアルバスは変電所構内プロセスバスP−NETと共用してもよいが、分離又は異なる専用シリアルバスで構成する方がバストラフィック負荷上、有利である)で接続する構成となる。
【0070】
また、図示していないが、プロセスバス通信手段11とディジタルデータ統合手段13のみを同一ラックに収納し、別ラックにプロセスバス通信手段11と保護制御手段12と機器制御装置用通信手段14を収納し、両収納ラック間を盤内シリアルバス又は盤内パラレルバスで接続する形態もある。この場合、両ラックにプロセスバス通信手段11を備えることになるが、第一の実施形態では、各手段の物理的台数を限定するものではないため、このような形態も本実施形態に含まれる。
【0071】
(第1の実施形態の特徴)
保護及び制御におけるリアルタイム性能が必要なデータ送受部分(例えば変電機器本体の主回路交流電気量の瞬時値データ送受部分や保護リレーによる事故検出時の遮断器開閉指令等の伝送ライン等)にパラレルバスを適用することで、時間性能を確保できる。
ここで、特定の手段にデータバス処理(マスター処理)を偏らせると、バス処理負荷が大きくなり、全体機能の時間性能及び時間強調が保てなくなる場合があり、また同手段が故障した場合に装置内全体のデータ送受が損なわれる危険性がある。この場合には、マルチマスター方式とすることで、各手段が独立してデータ送受でき、前述の問題が回避できる。
さらに、本実施形態の機能構成を実現する物理的形態は多様であり、大きくは盤構成から小さくはカスタムモジュール等の実現方法まである。これらについては具体例を前述ている。
【0072】
(第1の実施形態の変形)
図9に示す符号CASE−D及びCASE−C部分に第1の実施形態の変形を示す。
CASE−D及びCASE−Cは、保護機能と制御機能を完全分離し、各々、ディジタル形保護装置及びディジタル形制御装置としたものである。
ここで、図の記号は次のように対応している。
PCU:保護制御手段12、PBCU:プロセスバス通信手段11、CMCU:機器制御装置用通信手段14、CU:制御手段122、MU:ディジタルデータ統合手段13、PU:保護手段121
この場合、ディジタル形保護装置は、プロセスバス通信手段11と保護手段121とディジタルデータ統合手段13と機器制御装置用通信手段14及びこれらのうち、全部又は一部をパラレルバスP−BUSで接続した保護専用構成である。また、ディジタル形制御装置はプロセスバス通信手段11と制御手段122とディジタルデータ統合手段13と機器制御装置用通信手段14及びこれらのうち、全部又は一部をパラレルバスP−BUSで接続した制御専用構成である。
この構成を基本として、第1の実施形態の特徴であるマルチマスター方式も当然適用できることは言うまでもない。さらに、以降で説明する他のすべての実施形態においても、本構成を適用できることも明言しておく。
【0073】
本変形例の特徴は、保護と制御の完全独立にあり、両者間で通信する場合はプロセスバスP−NET経由となる。装置分離形態であるため、電源含めて容易に電源分離(分割)でき、信頼性としては最高のものとなる。超高圧系の変電システムではコスト以上に信頼性を重視するため、本形態が適する。
さらに、本実施形態では保護と制御を装置分離したが、保護機能を主検出リレーと事故検出リレー(フェ−ルセーフリレー)から構成させる場合は、さらに信頼性を高めるため、主検出リレー保護装置、事故検出リレー保護装置に分離してもよい。この場合も各々の装置内の機能構成はCASE−Dと同様である。
【0074】
(第2の実施形態)
第2の実施形態を図10及び図11で説明する。ディジタル形保護制御装置1のみ図示し、機器制御装置3−1〜3−nやセンサユニット2−1〜2−nとの接続形態は第1の実施形態と同じであるため、図示上は省略してある。
第2の実施形態の特徴は、プロセスバス通信手段11、保護制御手段12、ディジタルデータ統合手段13、機器制御装置用通信手段14の各手段間のデータ伝送をシングルマスター方式とすることが発明の特徴である。
【0075】
シングルマスター方式はマスターとなる手段を固定するため、各手段間のデータバス制御が簡素であり、バス調停を必要としない。また、データ伝送管理をマスターとなる手段が一手に引き受けるため、データ送受部分のアプリケーシヨンは簡素になる。簡素化は装置の品質向上に有効である。この方式に問題点があるとすれば、マスター手段の不良で、健全な手段間のデータ送受まで不可となり、不良時の影響が大きいことがあげられる。また、スレーブ間のデータ送受に一旦、マスターとなる手段を介す為、その分、データ渡しのリアルタイム性に影響がでる。
【0076】
しかし、リアルタイム性の要求は、パラレルバスP‐BUSの高速化等で補えられる。
また、保護及び制御動作の継続でなく、リレー動作や制御動作の誤動作防止のリスクを優先すべきとするならば、マスターとなる手段の不良は装置の不良として扱う安全サイドでの考えもある。この考えに立てば、第2の実施形態におけるマスター固定の考えはなんら問題ない。これに対し、一つの手段の不良でも、他の健全な手段で保護又は制御の機能(動作可能な場合)を継続さるという、変電機器本体の設備保護に重きをおく考えもある。これらは、電力会社や一般産業のユーザサイドの考えにより、どちらが最良とは言いがたい。尚、第1の実施形態では、どちらの考えにも対応可能である。
【0077】
次に、シングルマスター方式の具体例を図10及び図11で説明する。
図10及び図11はマスターとスレーブの関係を図示している。図10では、マスターをプロセスバス通信手段11とし、保護制御手段12、ディジタルデータ統合手段13、機器制御装置用通信手段14はすべてスレーブである。
【0078】
プロセスバスP−NETとディジタル形保護制御装置1のパラレルバスP−BUSを中継する手段がプロセスバス通信手段11であり、プロセスバスP−NETとの送受信データ及びパラレルバスP−BUS内での保護制御手段12、ディジタルデータ統合手段13、機器制御装置用通信手段14間でのバスデータが混在することで、ディジタル形保護制御装置1内のバストラフィックが悪化しないようにデータ中継制御する必要がある。このようにプロセスバス通信手段11はディジタル形保護制御装置1内において、バス制御の要であり、シングルマスター方式ではマスターとして固定することが効果的である。
【0079】
例えば、母線保護の親局をディジタル形保護制御装置1とすると、各回線に分散するディジタル形保護制御装置から変電機器本体の主回路交流電気量(ディジタルデータ)を入力し、母線保護リレーを実現できる。この場合、プロセスバスP−NET経由での主回路交流電気量(ディジタルデータ)の取り込みが主となるので、プロセスバス通信手段11がディジタル形保護制御装置1内において、外部、内部のバス制御を行う方が制御しやすい。
また、変圧器保護用ディジタル形保護継電器において、変圧器1次側及び2次側等の間の電気量を差動演算して事故を判別させる場合も、プロセスバスP−NET経由で2次側電気量を1次側設置のディジタル形保護制御装置1に送信する。
【0080】
よって、保護制御手段12は2次側データとディジタルデータ統合手段13にある1次側データを必要となる。2次側データ及び1次側データはプロセスバス通信手段11がマスターとなり、優先してスレーブの保護制御手段12に受信処理させる。
図10に示す伝送方向C1は1次側データをディジタルデータ統合手段13から取り出し、保護制御手段12に送信する様子を示している。
図11では、プロセスバス通信手段11、保護制御手段12、ディジタルデータ統合手段13、機器制御装置用通信手段14以外の第2の手段として、バスマスター手段16を同じパラレルバスP−BUS上に結合している。
【0081】
図10のようにバスマスターとなるプロセスバス通信手段11はバス処理負荷が大きく、本来プロセスバス通信手段で処理するプロトコル変換等の演算処理負荷に影響を与える場合も想定される。この問題はプロセスバス通信手段11に高速ディジタル演算プロセッサを採用することで解決できる。しかし、高速化を実施しない場合は、第2の手段として、バスマスター手段16を設けることが望ましい。これは、ディジタル形保護制御装置1内の処理負荷を均等化する考えである。
【0082】
図11に示す伝送方向C2はディジタルデータ統合手段13から変電機器本体の主回路交流電気量(ディジタルデータ)をバスマスター手段16が取り込み、スレーブである保護制御手段12に送信する様子を示している。
【0083】
以上、具体例を図10、図11で述べた。マスターとなる手段を決めるポイントは、ディジタル形保護制御装置1の保護リレー方式(母線保護、変圧器保護、送電線保護[距離リレー、PCMリレー等])及び回線単位の制御とするか、複数回線をまとめて集中制御するなどのシステム構成上におけるデータ送受の関係や、装置内のデータ送受の関係、適用する各手段のハードウエア性能、装置内不良監視の作り込みの容易性等から判断すべきである。
尚、図10及び図11のシングルマスター形態のみに本実施形態が制約されるものではない。
【0084】
(第2の実施形態の特徴)
ディジタル形保護制御装置内のバス処理負荷がマスターとなる手段の処理能力上、問題ない限り適用できる。この場合は時間性能及び時間強調も安定している。また、バス制御を1箇所で行うため、バス調停機能が不要となり、ハードウエアを簡素化できる。さらに、バスの不良モードも単純になるため、バス監視も容易になる。
【0085】
(第3の実施形態)
第3の実施形態を図12で説明する。尚、ディジタル形保護制御装置1のみ図示し、機器制御装置3−1〜3−nやセンサユニット2−1〜2−nとの接続形態は第1の実施形態と同じであるため、図示上は省略してある。
同図は、第1及び第2の実施形態において、プロセスバス通信手段11、保護制御手段12、ディジタルデータ統合手段13、機器制御装置用通信手段14を共通のパラレルバスP−BUS1で接続した実施例である。
【0086】
第3の実施形態の特徴はプロセスバス通信手段11内の伝送データを処理する機能構成にある。同図では、説明上、必要な機能のみ図示している。プロセスバス通信手段11内の伝送データを処理する機能は主に、通信制御手段111とパラレルバスP−BUS2で接続したブリッジ112からなり、このブリッジ112はディジタル形保護制御装置1内のパラレルバスP−BUSとも接続している。
パラレルバスP−BUSとパラレルバスP−BUS2は同一伝送方式のバスである。これは、例えば、パラレルバスP−BUSにPCIバスを適用した場合、パラレルバスP−BUS2にもPCIバスを適用することを意味している。同一バス方式であるため、ブリッジ112のブリッジ制御は容易であり、複雑な伝送アクセスの調停等を必要としない。よって、ハードウエアは簡素になる。
【0087】
基本的には送受データを中継して垂れ流すだけでよいが、中継するデータを選別する機能を有する。この機能はパラレルバスP−BUSとパラレルバスP−BUS2上のデータが必要としない一方に伝送され、トラフィックが悪化することを回避することに役立つ。尚、このパラレルバスP−BUS2はプロセスデータが送受されるバスである。
【0088】
本実施形態を適用しない場合、図26で説明した構成では、プロセスバスP−NET(図26では符号Z29で示す)は変電所内の他回線間にまたがるため、バストラフィックを調整する機器(例えばルータやHUB等)が外部に必要になる。ルータ等を設けるのは、プロセスバスP−NETのトラフィックを分離し、バス伝送のリアルタイム性を確保させるためである。ルータ等がない場合、伝送のリアルタイム性が損なわれる場合がある。
【0089】
これについて説明する。変電機器本体(送電線含む)の保護方式として母線保護や変圧器保護では他ベイ(又は他回線)の変電機器本体の主回路交流電気量が必要である。しかし、他ベイの電気量は不要で、自端部分の保護のみでよい送電線保護の距離リレーや過電流保護、地絡保護等では、自端の送電線を流れる交流電気量のみ保護リレー演算上、必要となる。このように、複数回線からなる変電所システムにおいて、その保護方式により、他ベイとの間で電気量のプロセスバス伝送を必要とする場合と、必要としない場合がある。他ベイの電気量を必要としない場合に、変圧器保護や母線保護に使用する膨大な電気量データが自ベイ内のプロセスバスP−NETに流れてくることは不要にトラフィックを悪化させ、伝送のリアルタイム性を損なう。
【0090】
以上の理由から外部にルータ等を設ける場合が生じるが、本実施形態では、簡易的にブリッジ機能を有するため、外部にルータ等が必要ないのである。但し、外部のルータ等を設けるか、設けないかは、本実施形態を制約するものではない。
尚、本実施形態は、第1の実施形態および第2の実施形態で例示したすべての形態で適用できることは言うまでもない。
【0091】
(第3の実施形態の特徴)
プロセスバス通信手段11内のプロセスデータ送受信バス(パラレルバスP−BUS2)がディジタル形保護制御装置1内のパラレルバスP−BUSと共通方式のバスとなるため、ブリッジ機能のハードウエアを簡素に実現できる。また、外部のルータ等でプロセスバス上のデータ伝送をブリッジするシステム構成と比較し、システム構築のトータルコストの削減につながる。
【0092】
(第4の実施形態)
第4の実施形態を図13で説明する。尚、ディジタル形保護制御装置1のみ図示し、機器制御装置3−1〜3−nやセンサユニット2−1〜2−nとの接続形態は第1の実施形態と同じであるため、図示上は省略してある。
同図は、第1の実施形態及び第2の実施形態において、ディジタルデータ統合手段13、保護制御手段12、機器制御装置用通信手段13、プロセスバス通信手段11は共通のパラレルバスP−BUSに接続した場合の構成であり、第1の実施形態のマルチマスター方式及び第2の実施形態のおけるシングルマスター方式のどちらでも適用できるものである。パラレルバスP−BUS上で送受するデータを記憶する記憶部を各々装備する。プロセスバス通信手段11には記憶部110、保護制御手段12では記憶部120、ディジタルデータ統合手段13では記憶部130、機器制御装置用通信手段14では記憶部140である。
同図は、これら記憶部をパラレルバスP−BUSの記憶空間上に予め割り付け、この割り付けに従い、保護制御手段12、ディジタルデータ統合手段13、機器制御装置用通信手段14間のデータ送受を記憶部渡しで制御するディジタル形保護制御装置1である。
【0093】
(第4の実施形態での作用)
本実施形態での記憶部とは、半導体メモリであり、メモリの種類を限定しない。適用するメモリにより、メモリ制御回路が異なるだけである。但し、異なるバス間のデータ渡しに有効なデュアルポートメモリなどを採用した場合、パラレルバスP−BUSと各手段内の回路のメインバスとを分離できるため、特殊なデータ送受回路や調停回路が不要となり、機能の品質確保が容易である。
【0094】
本実施形態の特徴は、ディジタル形保護制御装置1内の各手段間のデータ送受をパラレルバスP−BUSの記憶空間上に予め割り付けることに特徴がある。パラレルバス上のアドレスバスにより、バス上に割り当てられるアドレス空間が決まる。このアドレス空間に各手段の記憶部110、120、130、140のアドレス範囲をハードウエアのデコード回路で割り付ける。
【0095】
このデコード回路は各記憶部の制御回路内に備えられ、記憶部へのアクセスが指定アドレス範囲であるかを判断して、記憶部へのアクセスを制御する。尚、アドレス範囲の割り付けを異なる記憶部で重複させた場合は、他の制御信号(メモリを選択する信号等)で自メモリへのアクセスを制御することになる。アプリケーションソフトからみると、ディジタル形保護制御装置1内のプロセスバス通信手段11、保護制御手段12、ディジタルデータ統合手段13、機器制御装置用通信手段14のデータ渡しは、アドレス空間に割り付けられた記憶部に対してであり、送受データの種類により格納メモリエリアを取り決めるだけである。送受データはメモリエリアから取り出し、書き込みするアプリケーションをプログラミングすればよい。
【0096】
例えば図26の形態等において、通常、シリアルバスであるプロセスバスで各手段間が結合されているため、独特のプロトコル(TCP/IP、UDP等)を有するイーサネットLAN技術が適用される場合が多い。
この場合、各手段間のデータ送受は端にIPアドレスで管理され、送信側はデータフレームを所定の規約にしたがい組み立て、受信側は逆に分解して、自身で管理するメモリ等に格納する方法となる。また、フレーム構造の生成等、専用のLAN制御回路も必要になる。
【0097】
尚、本実施形態では、プロセスバス通信手段11、保護制御手段12、ディジタルデータ統合手段13、機器制御用通信手段14をすべて共通のパラレルバスP−NETで結合しているが、特定の手段間だけをパラレルバスで結合した場合及び、各手段間で複数のパラレルバスを存在させても、その間でも記憶部渡しでデータ送受でき、これも本実施形態の変形例である。
パラレルバスP−BUSではなく、シリアルバスで接続した場合でも、適用できることは言うまでもない。すなわち、本実施形態は各手段間を独特のプロトコルを有するLANにより接続を行わないため、極めて有効に適用できる。
尚、本実施形態は、第1の実施形態および第2の実施形態で例示したすべての形態で適用できることは言うまでもない。
【0098】
(第4の実施形態の特徴)
ディジタル形保護制御装置1内の各手段のアプリケーションプログラムソフトは、各手段間を接続する伝送バスの存在を意識せずに、記憶空間(いわゆるメモリマップ)上でのデータ渡しが可能になり、各手段間のデータ送受に関するアプリケーションプログラムソフトを簡素化でき、ソフトウエア品質も向上する。
【0099】
(第5の実施形態)
第5の実施形態を図14で説明する。尚、ディジタル形保護制御装置1のみ図示し、機器制御装置3−1〜3−nやセンサユニット2−1〜2−nとの接続形態は第1の実施形態と同じであるため、図示上は省略してある。また、本実施形態を説明する上で、必要な手段のみ図示し、他は記載を省略している。
【0100】
図14では、複数のディジタル形保護制御装置で共用する外部のサンプリングマスター手段4から基準信号を取り込み、ディジタルデータ統合手段13内の同期信号生成手段131にて、センサーユニット2−1〜2−nで必要なサンプリング信号SC1−SPを同時配信し、さらにこのサンプリング信号SC1−SPをN分周(N:整数)し、N分周した信号SSPを保護制御手段12に配信する分周手段132を備えたディジタルデータ統合手段13からなるディジタル形保護制御装置1を示している。
また、同図は、第1の実施形態及び第2の実施形態におけるディジタル形保護制御装置1において、プロセスバス通信手段11、保護制御手段12、ディジタルデータ統合手段13、機器制御装置用通信手段14が共通のパラレルバスP−BUSで接続した具体例を示している。
【0101】
尚、サンプリングマスター手段4は、複数のディジタル保護制御装置に同一の基準信号を配信するものである。
例えば、サンプリングマスター手段11内のクロック発信器をベースに生成したパルス信号を信号用ドライバ回路を通して、分配する。
または、GPS(Global Positioning System)衛星を利用する方法もある。GPS受信電波から1秒パルス信号を生成し、この1秒パルス信号を基準信号SSとして分配する。いわゆるGPS受信ユニットをサンプリングマスター手段4とする方法である。この場合、場所に依存しない精度の高い1秒パルス信号を生成できるため、変電所内外のディジタル形保護制御装置の間でサンプリング同期をとることが可能になる。特に送電線のPCMリレー等では、対向端でサンプリング同期が可能である。また、時刻付けが必要な場合も、GPS受信信号から時刻データが得られるため、サンプリングマスタ手段4から配信を受けることができる。
【0102】
(第5の実施形態での作用)
基準信号SSからサンプリング信号SC1−SPを生成するタイミング波形を図15に示す。但し、図15は4分周して生成する例を図示している。同図の例では基準信号SSの立下りエッジE11とサンプリング信号SC1−SPの立下りE12ずれ量EWを所定の周期カウンタで計測し、このずれ量分EWを補正することで、ずれを理論的には“0”(実際はハードウエア制御のやりやすさから、所定の範囲以内とする方が良い)とする。これは、基準信号SSの周期毎に逐次、ずれ量の検出及び補正を行い、両信号の同期を保つ。
【0103】
センサーユニット2−1は受信したサンプリング信号SC1−SPのパルス信号に従い、パルス信号の立ち上がり又は立下りエッジを検出し、この検出に同期し、変電機器本体の複数量ある電気量のA/D変換処理(すなわち、マルチプレクサによるスイッチング、A/D変換の一連の処理)を行う。すなわち、サンプリング信号SC1−SPの周期で主回路交流電気量をサンプリングすることになる。このA/D変換データSC1−DTは逐次、ディジタルデータ統合手段13に送信される。尚、次のサンプリング開始(次のエッジ検出まで)までに、サンプリングしたA/D変換データSC1−DTをすべてディジタルデータ統合手段13に送信を終える。
【0104】
以上の処理がすべてのディジタル形保護制御装置とセンサーユニットとの組み合わせでなされ、且つ、これらの処理は共通のサンプリングマスター手段4の基準信号に同期させていることから、変電所内において、電気量のサンプリング同期による保護制御が実現する。特に、母線保護や変圧器保護において、プロセスバスのような通信手段で他端の電気量を取り込む必要のある保護リレー演算方式では、回線間での電気量取り込みを同期(サンプリング同期)させることは保護性能の精度確保上、必須であり、これが容易に実現できる。
また、ディジタル形保護制御装置1内では、サンプリング信号SC1−SPに同期させたN分周信号を保護制御手段12の保護リレー演算の基準信号SSPとして使う。
【0105】
保護リレー演算は、電気量のサンプリングデータ(通常、時系列のデータ)を基に実施するが、必ずしも保護リレー演算周期と上記サンプリング周期は同じではない。例えば、サンプリング周期は電気角7.5°で演算周期は電気角30°とする。サンプリングは演算周期に対してオーバサンプリングとすることで、リレー性能を向上させている。この場合、本実施形態では、サンプリング周期に対し演算周期を同期したN倍(N:整数)周期とする。先述の例では、電気角7.5°に対し、演算周期を電気角30°とするので、サンプリング信号を4分周するれば、リレー演算周期信号SSPが得られる。
リレー演算周期信号SSPとサンプリング信号SC1−SPが非同期であると、センサーユニットからディジタルデータ統合手段13を介して、保護制御手段12へ送信する電気量データのタイミングと、保護制御手段12の保護リレー演算のタイミングがずれ、必要とする時系列の電気量の取り込み遅れや取り込み損ないが生じ、保護リレー性能が安定にくい。
また、リレー演算周期をサンプリング周期の整数倍でない場合は、リレー演算にあたり、補間処理等が発生するため、演算負担も大きく扱い難い。
以上から、保護リレー演算周期はサンプリング周期と同期し、且つ、サンプリング周期の整数倍とすることで、保護リレーの性能確保が図れる。
【0106】
尚、本実施形態のディジタル形保護制御装置1では、1台の収納ラック又は盤で構成できるため、基準信号SSPの配信長は短い。よって、特殊なノイズ対策を必要とせず、容易に配信できる。図8に示したディジタル形保護制御装置1Cのように構成した場合は、バッグボード上のパラレルバスP―BUSを利用してパターン配線で配信でき、極めて安全である。但し、同一ラック内であれば、装置内を専用線で配線しても良い。また、図9に示す盤構成の場合でも盤内配線は長くても1m以内であり、端にシールド付きケーブル等で十分である。
本実施形態は、第1の実施形態および第2の実施形態で例示したすべての形態で適用できることは言うまでもない。
【0107】
(第5の実施形態の特徴)
保護制御手段12、ディジタルデータ統合手段13、機器制御装置3−1〜3−nを個別にプロセスバスで結合させた場合、通常、プロセスバスはLAN形態となり各装置及び各手段の動作は互いに非同期となる。よって、各装置及び各手段間の協調が難しく、変電機器システムとしての保護及び制御の時間性能確保(保護リレーや変電機器の状態値への時刻付け及び上位系への情報伝送に関する時間性能等)に支障が生じる場合もある。
【0108】
本実施形態のディジタル形保護制御装置は1装置内に保護制御手段12、ディジタルデータ統合手段13、プロセスバス通信手段11及び機器制御装置用通信手段14を収納しており、且つ、必要な手段間をパラレルバスP−BUSで接続している。そのため、装置内の手段間において、データ取り込み及び演算タイミングの協調が図りやすい。また、保護演算時間を管理するために必要な保護リレー演算周期信号(センサーユニットのサンプリングに同期し、周期を整数倍させた基準信号)を容易に配信することが可能である。
【0109】
(第6の実施形態)
第6の実施形態を図16で説明する。尚、ディジタル形保護制御装置1のみ図示し、機器制御装置3−1〜3−nやセンサーユニット2−1〜2−nとの接続形態は第1の実施形態と同じであるため、図示上は省略してある。また、本実施形態を説明する上で、必要な手段のみ図示し、他は記載を省略している。
【0110】
図16の例では、外部のサンプリングマスター手段4から基準信号SSを取むだディジタルデータ統合手段13にて、センサーユニット2−1〜2−nに必要なサンプリング信号SC1−SPを同時配信し、さらにこのサンプリング信号SC1−SPをN分周(N:整数)し、N分周した信号SSPを保護制御手段12内の保護手段121に配信し、機器制御装置用通信手段14にて、同期信号生成手段141はサンプリングマスター手段4から基準信号SSを取り込み、この基準信号SSに同期して、時刻同期用基準信号PPSを生成し、機器制御装置3−1〜3−n及び保護制御手段12内の制御手段122に同時配信する構成を示している。
また、同図は、第1の実施形態及び第2の実施形態におけるディジタル形保護制御装置1において、プロセスバス通信手段11、保護制御手段12、ディジタルデータ統合手段13、機器制御装置用通信手段14が共通のパラレルバスP−BUSで接続した具体例を示している。
【0111】
(第6の実施形態での作用)
保護機能のリレー演算周期となる信号SSPの処理は第5の実施形態と同様であるので説明を省略する。制御手段122側のみ説明する。
制御手段122は時刻同期用基準信号PPSを入力する。図16では、この信号PPSは装置内のパラレルバスP−BUS経由で送信しているが、装置内で専用線又はプリント基板上の配線パターンを使用しても良い。基準信号SSから時刻同期用基準信号PPSを生成する方法は図15の例と原理は同様でよい。
制御に必要な時刻同期は変電機器本体側の状態イベントのサンプリング同期と時刻付けである。通常、時刻同期精度は1msecの分解能で状態イベントをサンプリングし時刻付けが要求される。
【0112】
よって、この制御スペックを満足させるために、時刻同期用基準信号は少なくとも1mm秒パルス信号とする。この1mm秒パルス信号CC1-DTを機器制御装置3−1〜3−n、制御手段122が共用することになる。制御手段122では、この信号の周期で、検出した状態イベントに時刻付けするため、1mm秒精度が確保できる。また、機器制御装置3−1〜3−nにおいても、1mm秒精度で、機器状態(油圧、ガス圧、遮断器開閉等)をサンプリングでき、且つ時刻付け可能である。尚、機器制御装置3−1〜3−nで時刻付けする場合は、時刻データを機器制御装置に配信する必要がある。
【0113】
図16の変形例としては、機器制御装置3−1〜3−nでのサンプリングを1mm秒以上のオーバサンプリングとし、このオーバサンプリングデータCC1-DTを取り込んだ機器制御装置用通信手段14で時刻付けする方法でも良い。この場合は、機器制御装置3−1〜3−nでは、時刻同期用基準信号PPSを必要としない。機器制御装置用通信手段14は受信したオーバサンプリングデータを間引いて、受信時刻で時刻付けする。尚、時刻付けは自手段内のリアルタイムクロックを利用するか、高精度で、且つ、時刻合わせが不要なGPS受信データを利用してもよい。
【0114】
図16では、保護制御手段12を保護手段121、制御手段122に分ける例で説明したが、ハードウエアを完全に共用した場合(すなわち、同一の演算処理部で保護と制御の両演算を実施する場合)でも本実施形態を適用できる。この場合、2つの演算周期信号(保護リレー演算、状変への時刻付けの演算)を同一演算部が共用し、各々が異なる周期のプログラムタスクとして動作させることで実現できる。
尚、本実施形態は、第1の実施形態および第2の実施形態で例示したすべての形態で適用できることは言うまでもない。
【0115】
(第6の実施形態の特徴)
同期タイミングの異なる保護機能及び制御機能ともに、1装置で時刻同期が可能となる。また、保護機能に必要な同期用の基準信号及び制御機能に必要な同期用の基準信号を1装置内で配信、共用するため、保護の時間性能、制御の時間性能を確保して独立して動作できる。
このため、例えば、保護機能が万一、不良で機能維持できない場合でも、独立して動作する制御機能は喪失しない。この逆も然りである。
【0116】
(第7の実施形態)
第7の実施形態を図17で説明する。尚、ディジタル形保護制御装置1のみ図示し、機器制御装置3−2〜3−nやセンサーユニット2−2〜2−nとの接続形態は第1の実施形態と同じであるため、図示上は省略してある。また、本実施形態を説明する上で、必要な手段のみ図示し、他は記載を省略している。
図17では、第1の実施形態及び第2の実施形態において、プロセスバス通信手段11と保護制御手段12とディジタルデータ統合手段13と機器制御装置用通信手段14を共通のパラレルバスP−BUSで接続している場合を示している。
また、同図において、機器制御装置用通信手段14から制御指令を意味する信号CC1−DTを機器制御装置3−1に出力する模式(1対1伝送)も図示している。尚、同様に機器制御装置3−2〜3−nにも同じように1対1伝送するが、省略図示し、代表として機器制御装置3−1との伝送で説明する。
【0117】
(第7の実施形態での作用)
機器制御装置用通信手段14は、例えば、時刻同期の周期で巡回式に制御指令を意味する制御信号CC1−DTを機器制御装置3−1に伝送する。機器制御装置3−1では、制御信号CC1−DTの受信タイミングにより変電機器の状態イベント(油圧、ガス圧、遮断器開閉等の事象)の時刻同期をとる。
【0118】
機器制御装置3−1〜3−nでは、時刻同期のタイミング(状変イベントへの時刻付け精度は1mm秒が必要とされている場合が多く、たとえば、1mm秒のタイミング)が必要である。本来、機器制御装置3−1〜3−nは、ディジタル形保護制御装置1から、このタイミング信号(すなわち時刻同期用基準信号)と制御指令(事故検出や選択制御による遮断器開閉指等)をCC1−DTを入力する。これは下り信号が2種類あることを意味している。上り信号は機器監視データとなる。
【0119】
この場合、下り信号に2本、上り信号に1本の伝送ケーブルが必要となり、また、1台のディジタル形保護制御装置が変電所内で多数設置され、さらに1台のディジタル形保護制御装置に多数の機器制御装置が接続されることを考えると、変電所全体でみると前記伝送ケーブル多くなる。また、機器制御装置側も2本の受信ケーブルと結合することは、その分、ハードウエアが大きくなる。
【0120】
本実施形態では、下り伝送を1本のケーブルとすることで、ケーブル本数を削減し、且つ、機器制御装置の受信ポートを削減する。
すなわち、1本のケーブルで対抗の機器制御装置3−1に時刻同期用タイミングと制御指令を送信する。この様子を図17の太線枠TSSで示している。
【0121】
制御指令を意味する制御信号(複数ビットで構成)は、最小限の構成として、データ開始を示すスタートビットST(又はスタートフラグシーケンス)と制御指令DATAからなり、これを時刻同期タイミング(たとえば1mm秒周期)で巡回式に送信する。この時刻同期タイミングは必要とする以上の精度とし、高速タイミングとしてもよい。この場合は、必要に応じて、機器制御装置は高速タイミングを分周して、必要な時刻同期タイミングに復元すればよい。
また、制御指令は、指令の有り無しに関わらず、上記周期で送信する。指令がない場合、指令無しを意味する信号を付加しても、前置保持の制御指令を送信してもよい。
【0122】
図示TSS部分は機器制御装置3−1内の受信処理であり、制御信号CC1−DTの各スタートビットSTの開始タイミング(TA1、TA2、TA3)で周期信号TSS−Aを生成している。また、スタートビットSTの開始タイミングではなく、スタートビットSTが正常なスタートビット(又はスタートフラグシーケンス)であることを認識した時点でタイミング(TB1、TB2,TB3)をとり、周期信号TSS−Bを生成する方法もある。後者の方がスタートビットの健全性を確認するため、より信頼性が高いと言える。
【0123】
尚、スタートビットSTは1ビットで表す2進数“0”、“1”であるが、スタートフラグシーケンスは複数ビットで、たとえば“0001010101”のような2進数列で信号の開始を意味する。さらに信号を、“0”から“1”、“1”から“0”への切り替え方向で、“1”、“0”をあらためて意味させるマンチェスタ伝送等を用いるとさらに伝送品質は向上する。尚、伝送は電気ケーブル、光ケーブルでもよい。
【0124】
以上に述べたように、1本の1対1ケーブル上にて、制御信号CC1−DTを時刻同期タイミングで巡回式に送信し、この制御信号CC1−DTの受信タイミングで時刻同期タイミングを機器制御装置3−1へ渡すことができる。
尚、本実施形態は、第1の実施形態および第2の実施形態で例示したすべての形態で適用できることは言うまでもない。
【0125】
(第7の実施形態の特徴)
ディジタル形保護制御装置と機器制御装置が分離している場合でも両者間で同期をとることができる。また、ディジタル形保護制御装置と機器制御装置間で同期信号だけを配信する専用ケーブルを設ける必要もない。
【0126】
(第8の実施形態)
第8の実施形態を図18で説明する。尚、第7の実施形態とディジタル形保護制御装置1、機器制御装置3−2〜3−nやセンサーユニット2−2〜2−nは同様であるので、省略し、異なる部分である、制御信号CC1−DTXと機器制御装置3−1の受信処理の模式のみ示す。
同図では、機器制御装置用通信手段14から外部に送信される制御指令(事故検出や選択制御による遮断器開閉指令等)を意味する制御信号を時刻同期のタイミング(たとえば1mm秒周期)よりオーバーサンプリング周期で巡回式に送信する方式CC1-DTXを示している。
【0127】
機器制御装置3−1はこの高周期受信のタイミングから時刻同期タイミングを復元する。
復元方法の具体例を述べる。同図は、制御信号をスタート符号ST-1(ビットでもフラグシーケンスでもよい)と時刻同期フラグF1及び制御指令データDATA1と、次のタイミングで再び、スタート符号ST-2と時刻同期フラグF2及び制御指令データDARA2を示す。
【0128】
本来の時刻同期タイミングよりオーバサンプリングで制御信号を送信しているため、時刻同期タイミングの場合、時刻同期フラグF1及びF2に、たとえばビット“1”をたて、そうではない場合はビット“0”とする。また、これは複数ビットで構成してもよい。機器制御装置3−1は受信した制御信号の時刻同期フラグF1(=“1”)及びF2(=“0”)を検出及び確認して、時刻同期タイミング(前述の例では、ビット“1”)に限り、そのタイミングTC1で、同期信号のパルスを変化させする。これにより同期信号TSS-Cを生成する。
【0129】
この方式では、時刻同期のタイミング(開始点)が時刻同期フラグで識別できるため、オーバーサンプリングによる制御信号の伝送と時刻同期のタイミング渡しが可能である。また、オーバーサンプリングによる制御信号の伝送は、すなわち、制御指令の高速伝送を意味する。
尚、本実施形態は、第1の実施形態および第2の実施形態で例示したすべての形態で適用できることは言うまでもない。
【0130】
(第8の実施形態の特徴)
ディジタル形保護制御装置1で時刻同期の周期よりもオーバサンプリングで制御信号CC1−DTを巡回式に伝送し、時刻同期の周期毎にサンプリング送信する制御信号CC1−DTに識別データを付加し、機器制御装置3−1で制御信号CC1−DTの受信タイミングで識別データを判別し、変電機器状態イベントの時刻同期をとることを特徴とするものである。
これにより、第7の実施形態と同様の特徴を有するばかりでなく、時刻同期よりもオーバサンプリングで巡回式に制御指令を機器制御装置3−1に送信するため、制御指令を高速に伝送できる。そのため、事故検出時、開閉器等の高速開閉指令を可能にしつつ、合わせて、機器制御装置3−1に時刻同期をとらせることもできる。
【0131】
(第9の実施形態)
第9の実施形態を図19で説明する。尚、センサーユニット2−1〜2−nとの接続形態は第1の実施形態と同じであるため、図示上は省略してある。また、本実施形態を説明する上で、必要な手段のみ図示し、他は記載を省略している。図19では、第1の実施形態及び第2の実施形態において、機器制御装置用通信手段14を入出力手段17に置き換え、プロセスバス通信手段11と保護制御手段12、及びディジタルデータ統合手段13と共通のパラレルバスP-BUSで接続した場合を示している。
入出力手段17は機器制御装置3Aへの制御指令を可動形又は静止形リレー部でON/OFF出力し、機器制御装置3Aからのデータ入力を絶縁形入力部でON/OFF入力する。この場合の機器制御装置3Aは従来形の現場制御装置(図25の符号Z9−1)に相当する。
【0132】
(第9の実施形態での作用)
入出力手段17の作用を図19の破線枠内に図示した機能図(説明上必要な入出力部のみ図示)を例に説明する。
出力部DOは装置内部の直流電源P5とドライバDRの“0”出力で可動形継電器RY1のコイルを励磁し、接点を閉として継電器RY1を駆動する。接点が閉となると、装置外から引き込んでいる変電所内直流電源P110を機器制御装置3AへメタルワイヤMを通して継電する。この継電器RY1にミニチュアリレーを適用し、リレー開容量の大きいパワーリレーRY2で一旦受け、継電する方法もある。このパワーリレー(スイッチングリレーとも言う)RY2は電子回路と比較すると大容量電流(数アンペアから数十アンペア)を扱うため、ディジタル形保護制御装置1の外部に装備させて、弱電部であるディジタルユニットとは分離する場合もある。
【0133】
ここで、可動形継電器を使わずに、パワー電解効果トランジスタ(パワーFETとも言う)やサイリスタ素子により静止形として継電させる場合もある。
また、入力部DIでは、通常、耐ノイズ対策として、外部入力との絶縁を図るためにフォトカプラPH等を使い、外部情報を電圧(P110とN間電圧)で入力する。
フォトカプラPHはその入力感度を抵抗Rによる分圧で決める場合が多い。フォトカプラPHは入力電圧を感度でON/OFFし、ディジタル形保護制御装置1内の電源P5のプルアップ及びGNDにより、電子回路で扱いやすい電圧で、2値状態“0”、“1”を取り込む。
電圧入力の場合、外部メタルワイヤの引き回しで耐ノイズや電圧降下の問題が生じる場合、一旦、メタルワイヤMからの信号を継電器で受けて、この継電器の接点の開閉で電圧入力させてもよい。
以上の構成により、入出力手段17は保護制御手段12からパラレルバスP―BUS経由に受信した制御指令を機器制御装置3Aに出力できる。また、機器制御装置3Aの機器情報を入力できる。
【0134】
尚、図19では、入出力手段17を共通のパラレルバスP-BUSに接続しているが、保護制御手段12との専用のパラレルバスP―BUS3又はシリアルバスS―BUS3で接続し、共通パラレルバスP―BUSと分離してもよい。これを図20に示す。
図20に示す構成の利点は、制御指令の伝送ラインP―BUS3とパラレルバスP-BUSとを分離することで、制御指令の伝送がパラレルバスP―BUS上の伝送(たとえば、ディジタルデータ統合手段13から保護制御手段12への交流電気量データの伝送等)に邪魔されないここである。このため、制御指令の時間性能(たとえば、選択制御の伝送時間や事故応動時間の性能)を向上させることができる。
尚、本実施形態は、機器制御装置用通信手段14を入出力手段17と置き換えるだけで、第1の実施形態および第2の実施形態で例示したすべての形態で適用できることは言うまでもない。
【0135】
(第9の実施形態の特徴)
機器制御装置のインターフェースが通信手段によるディジタル化対応していない場合(従来の機器制御装置)でも、本発明のディジタル形保護制御装置とメタルワイヤ等で接続することで、情報伝送(制御指令含む)することが可能である。尚、このON/OFF入出力は所内直流電源であるDC110V渡しが標準である。但し、非標準の電圧渡しもある。
【0136】
第1又は第2の実施形態のディジタル形保護制御装置は本来、通信手段で結合したディジタルシステム(変電機器システム)に適用できるが、実際に、変電所(又は電気所)構内伝送がすべて通信手段で結合したディジタル通信となるには移行期間があり、変電機器の増設やリプレース等でディジタル伝送対応に置き換わっていくことが想定される。この場合、本実施形態は従来機器制御装置と接続可能であるため、移行時に有効に適用できる。
【0137】
(第10の実施形態)
第10の実施形態を図21で説明する。尚、センサーユニット2−1〜2−nとの接続形態は第1の実施形態と同じであるため、図示上は省略してある。また、本実施形態を説明する上で、必要な手段のみ図示し、他は記載を省略している。
図21では、第1の実施形態及び第2の実施形態において、機器制御装置用通信手段14とプロセスバス通信手段11と保護制御手段12、及びディジタルデータ統合手段13とを共通のパラレルバスP―BUSで接続した場合を示している。
さらに、本実施形態の機器制御装置用通信手段14は通信手段CC1(たとえば1対1の下り専用シリアル伝送路)で外部の入出力手段17Aと接続する。この入出力手段17Aはさらに、機器制御装置3AとメタルワイヤMで接続する。機器制御装置3Aは従来形の現場制御装置(図25の符号Z9−1)相当である。また、入出力手段17Aと機器制御装置3A間の入出力構造及び作用は第9の実施形態と同様であるので説明を省略する。
尚、入出力手段17Aの出力部DO及び入力部DIの構成は図19と同様である。
【0138】
(第10の実施形態での作用)
第9の実施形態との相違は、ディジタル形保護制御装置1内に機器制御装置用通信手段14を備え、外部の入出力手段17Aを中継手段として使用し、従来形の機器制御装置3Aとのインターフェースを実現することにある。すなわち、ディジタル形保護制御装置1から機器制御装置3Aへの制御指令(事故検出及び選択制御における開閉器への開閉指令等)は通信手段を利用するディジタル信号であるため、入出力手段17A内の通信制御部で受信し、制御指令の種別等をデコードする。そして、該当する出力部のメタルワイヤMの1つをON/OFFで継電して、機器制御装置3Aに指令を伝達する。
また、機器制御装置3Aの上り情報(機器状変等)もメタルワイヤMの該当線で伝達され、入出力手段17AにON/OFFで絶縁入力され、通信制御部を介し、機器監視ディジタルデータとして通信手段CC1(たとえば1対1の上り専用シリアル伝送路等)よりディジタル形保護制御装置1に送信される。
尚、本実施形態は、第1の実施形態および第2の実施形態で例示したすべての形態で適用できることは言うまでもない。
【0139】
(第10の実施形態の特徴)
従来形の機器制御装置3Aとディジタル形保護制御装置1の伝送接続を外部入出力手段17Aで中継して接続できる。ディジタル化への移行の過渡期において、機器制御装置が従来形であることが多い。この場合、入出力手段17Aで中継接続するシステム構成とし、ディジタル化への移行が完了した時点には、本入出力手段17Aを取外すことのみで、再接続すればよい。
ON/OFF入出力はDC110Vクラスの強電部であるため、サージ耐圧等の関係上、大型にならざるを得ない。本発明のように、ディジタル形保護制御装置1と分離した外部入出力手段17Aとしているため、ディジタル形保護制御装置1の大きさに影響を与えない。また、入出力手段17Aは大型化しても、ディジタル形保護制御装置1とは分離されているため、スペース確保できる場所に設置するという自由度を有する。
【0140】
(第11の実施形態)
第10の実施形態を図22で説明する。尚、センサーユニット2−1〜2−n、機器制御装置3−1〜3−nとの接続形態及びディジタル形保護制御装置1内の手段は第1の実施形態と同じであるため、図示上は省略してある。また、本実施形態を説明する上で、必要な構造のみ図示している。
同図は、上面の通風孔UH及び底面の通風孔LHを備えたディジタル形保護制御装置の収納ラック1Fと送風手段6と、送風手段6に接続した温度センサHEから構成する。
【0141】
原理的には、従来の送風機で冷却する産業機器と同じであり、送風手段6として、モータで羽部を回転させ、送風し、底面の通風孔LHから空気を吸い込み、強制的に上面通風孔UHから排出させる。この強制空冷方式を利用し、本実施形態では、ラック1F内に装備した光部品への通風路を確保させ、温度に対する光部品の劣化を抑制し、寿命を延命させることにある。
また、送風手段6も通常、ベアリング式によるファンであるため、磨耗劣化を生じる。この劣化を抑制するために、ラック1Fの周囲温度を温度センサHEなどで監視し、所定温度の場合に限り、送風することで、送風手段6の総稼動時間を節約する。また、温度センサによらず、時間基準で送風と停止を計画運転させてもよい。昼間だけ送風し、夜間は送風しない等である。
【0142】
ディジタル形保護制御装置1は通常、数十年以上、連続使用させることから、装置の故障率低下を避ける必要がある。光部品は他の電子部品と比較し、故障率が一桁悪い(おおよそ数100Fit)。光部品は発光部の電流で消耗すること、及び電流が温度依存するため、高温状態では、消費電流も増加し、発光部の消耗を促進していく。
システムをディジタル化し、通信手段で結合していく変電所内保護制御システムでは、通信の品質確保のため、電気ケーブルよりも光ケーブルが多用されてくる。このため、光伝送部に使用する光部品が多数あり、装置の故障率を悪くする傾向にある。
このような光通信を多用する保護制御システムでは、光部品の劣化がシステムの劣化となり、システムのMTBF(平均故障間隔)のボトルネックとなる。よって、光部品の劣化を抑制し、装置の故障率を改善することは必須と言える。その解決手段としては、光部品を強制空冷で温度を下げることが効果が良い。
【0143】
(第11の実施形態での作用)
図22の引き出し図示部XE1は収納ラック1F内のハードウエアの一部を示している。プリント基板B1に光部品P1、プリント基板B2に部品Y1X、Y2Xを実装した例であるが、この場合、底面からの送風W2は部品Y1X、Y2Xが障壁となり、光部品P1への送風を妨げている。
これに対し、図示部XE2では、プリント基板B2への部品実装位置をY1O、Y2Oとすることで、光部品P1への通風路が確保され、送風W3は底面から上面に抵抗なく流れる。
さらに、引き出し図示部XE3に示すように、送風部FAN1の送風W4がプリント基板B1及びプリント基板B2の間に効率的に流れるように、送風の偏向板SH1を所定角αで設ける。以上により、光部品P1への通風路が確保され、送風手段6を搭載したことによるディジタル形保護制御装置1の故障率が飛躍的に改善される。
尚、本実施形態は、第1の実施形態および第2の実施形態で例示したすべての形態で適用できることは言うまでもない。
【0144】
(第11の実施形態の特徴)
電気及び電子部品と比較し、故障率が高い光伝送部品の故障率低減が可能になる。特に、ディジタル形保護制御装置1を変電機器本体又は近傍に装備する場合及び屋外ハイム等に備える場合、又は変電機器から離れた屋内制御室等に設置するが空調設備を有していない場合に、著しい効果を発揮する。ここで、前述の空調のある室内に設置した場合でも効果があることは言うまでもない。設置環境による相対的な効果の差異があるだけである。
また、設置環境の周囲温度に応じて、送風を制御するため、送風手段6の常時連続運転を避け、送風手段6の可動部に対する劣化進行を抑制することができる。さらに、光伝送部に強制空冷が効率的になされるように、通風路を確保するため、送風効果を阻害しない。
本実施形態を適用することで、光通信システムとして構成した変電所内保護制御システム全体のMTBFが飛躍的に改善する。
【0145】
(第12の実施形態)
第12の実施形態を図23で説明する。尚、ディジタル形保護制御装置1内のプロセスバス通信手段11とディジタルデータ統合手段13、及び機器制御装置3−2〜3−nやセンサユニット2−1〜2−nとの接続形態は第1の実施形態と同じであるため、図示上は省略してある。また、本実施形態を説明する上で、必要な手段のみ図示し、他は記載を省略している。
【0146】
図23は、変電機器に対する制御指令(事故検出及び選択制御による開閉器への開閉指令等)の伝送経路を示したものである。ディジタル形保護制御装置1の保護制御手段12では、ディジタルデータ統合手段13経由で取り込んだ変電機器本体の主回路交流電気量より保護リレー演算を行い、事故検出時は開閉器への開閉指令(再閉路含む)を出力する。また、上位系からの機器選択制御をステーションバスS―BUS経由で受信し、変電機器の選択及び制御指令を出力する。
【0147】
これらは保護制御手段12の演算部124(保護と制御で図5に示すように分けてもよい)で処理し、パラレスバスP-BUSの伝送制御部125から機器制御装置用通信手段14に出力する。この制御指令を表す制御信号はバス伝送手段143で受信処理し、演算部144で中継処理し、内部バス146を通してシリアル伝送手段145から1対1のシリアル伝送路CC1をへて、機器制御装置3−1のシリアル伝送部311で受信処理される。
【0148】
尚、伝送する制御信号は、例えば、複数ビットの2進数列で構成されるコマンドである。このコマンドはシリアル伝送部311でパラレルデータに変換され、内部バスPD経由で駆動制御手段312に渡される。駆動制御手段312では、このコマンドに対し、エラーチェックを行う。エラーがない場合は駆動信号SDをドライバ313に出力し、パワー継電手段314(同図では、機器制御装置内の電源P5とドライバ313によりコイルを励磁して接点閉とし、電源P110で継電する可動形パワー継電器を図示しているが、静止形のサイリスタやパワーFET等でもよい)により最終段の制御出力Yとなる。
この制御出力Yにより、遮断器、断路器等が開閉制御されることになる。
【0149】
(第12の実施形態での作用)
以上の処理の流れをまとめると、制御指令の発信元から最終の受信元までは以下の経路となる。
・演算部124〜バス伝送手段125:図23の矢印TR1
・バス伝送手段125からバス伝送手段143:図23の矢印TR2
・バス伝送手段143から演算部144:図23の矢印TR3
・演算部144からシリアル伝送手段145:図23の矢印TR4
・シリアル伝送手段145からシリアル伝送手段311:図23の矢印TR5
・シリアル伝送手段311から駆動制御手段312:図23の矢印TR6
【0150】
以上、TR1〜TR6において、いくつかの手段と伝送路を経由するため、制御指令を複数ビットで表現したコマンドのデータ品質はきわめて重要である。発信元から最終受信元までに、いくつかの手段と伝送路ある場合、それらの手段や伝送路の一部不良(一過性不良含む)により、コマンドにビットエラーが発生する割合が増し、エラービットを含んだコマンドにより、最終段の誤った制御出力Yになる割合も増す。
【0151】
これを回避するために、ディジタル形保護制御装置1内で所定のルールによりコマンドを構成し、最終段の駆動制御手段312で前記ルールに基づきエラーチェックする方法が効果的である。
所定のルールとは、たとえば、制御指令を8ビットの2進数で構成した場合、1ビットを付加してパリティビットとしてエラー検出する方法や誤り訂正符号(ECC符号)を制御指令に付加してエラー検出する方法でよい。また、コマンドに所定のフラグシーケンスを付加して、駆動制御手段312でこのフラグシーケンスが破壊されていないことを確認し、正常と判断するなどの方法もある。さらに、制御指令のビット列に反転ビット列を付加して、駆動制御手段312で制御指令と反転ビット列の並びになっているかをチックする方法もある。尚、以上のエラーチック方法だけに本実施例が限定されるものではない。
【0152】
伝送路上の伝送エラーによる誤りは、従来より種々の伝送エラー検出技術があるが、本実施形態の特徴は、制御指令の発信元(又はディジタル形保護制御装置1内の所定の手段)にて、所定ルールでコマンド化しておけば、手段や伝送路のどこに不良が発生するかに依存せず、最終段の駆動制御手段312でコマンドのエラーを検出できる。
【0153】
尚、駆動制御手段312はエラーを検出した場合、そのコマンドを破棄し、コマンドを実行しない。そして、このエラー検出を1対1シリアル伝送路CC1経由でディジタル形保護制御装置1にアンサーバックする。このアンサーバックを受けることで、ディジタル形保護制御装置1はコマンドの再送やエラー通知の頻度監視により、該当機器制御装置3−1への制御指令送信をロックし、不良をステーションバスS−NETの監視サーバ(図24のZ4)に通知する。
尚、本実施形態は、第1の実施形態および第2の実施形態で例示したすべての形態に適用できることは言うまでもない。
【0154】
(第12の実施形態の特徴)
従来の通信手段によらない形態(図25)では、ディジタル形保護制御装置と機器制御装置間は第10の実施形態及び第11の実施形態に記載したON/OFF電圧渡し等の1対1のメタルワイヤによる。この場合、制御指令は複数のON/OFF接点で電気渡しするため、制御指令の数だけ、ON/OFF部及びメタルワイヤが必要であった。しかし、本実施形態では、通信手段を適用するため、複数ビットですべての制御指令をコマンドとして表現し、送信通信路1本で機器制御装置に情報伝送できる。
ここで、1対1メタルワイヤによる電圧渡しから通信による情報伝送に置き換えるため、多量の情報を伝送できるが、その反面、通信品質を保つことが重要になる。通信媒体の品質に関してはノイズに強いマンチェスタ符号伝送やエラーチェック符号又はシーケンスを設ける等の対策で対処可能である。
しかし、エラーチェック符号を生成する前段階で信号品質の不良が発生した場合は、不良信号がそのまま機器制御装置に伝送され、受信側で信号の不良をチェックできず、制御出力の誤動作、誤不動作につながる恐れがある。
【0155】
これを防止するため、ディジタル形保護制御装置からの制御指令は所定のルールに基づくコマンドとし、末端の受信側である機器制御装置で前期ルールに基づくコマンドであることを確認し、コマンドにエラーがないかを判定する。この一連の処理により、制御指令伝送のデータ品質を保つことができる。
【0156】
(第13の実施形態)
第13の実施形態を図24で説明する。尚、センサーユニット、ディジタルデータ統合装置は省略している。
同図では、複数のディジタルデータ統合装置、複数の機器制御装置及び複数の保護制御装置がプロセスバスP−NET1された変電機器システムにおいて、プロセスバスP−NET1に接続されたディジタル形保護制御装置1Eから機器制御装置3−1−Pへの制御信号を伝送する経路を示している。
【0157】
ディジタル形保護制御装置1Eは保護制御手段12とプロセスバス通信手段11がパラレルバスP−BUSで接続した構成であり、機器制御装置用通信手段及14びディジタルデータ統合手段13は備えていない。このようなディジタル形保護制御装置1Eの場合、プロセスバスP−NET1経由で機器制御装置3−1−Pと接続することになる。これは、図26に示した形態の場合と同様である。
【0158】
ここで、プロセスバスP−NET1はバスを結合するHUB(HR)や宛先アドレスにより、伝送方向を制御するルータ等(HR)と伝送ケーブルから構成される。
また、機器制御装置3−1−Pはプロセスバス通信手段315と駆動制御手段312が内部バスPDで接続されている。駆動制御手段312から制御出力Yまでの構成と作用は第12の実施形態と同じである。
このプロセスバス通信手段315はディジタル形保護制御装置1Eのプロセスバス通信手段11と略同様である。
【0159】
(第13の実施形態での作用)
図24の場合、図23と異なり、制御指令(事故検出及び選択制御による遮断器開閉指令等)の伝達経路はプロセスバスP−NETを経由する。経路をまとめると以下の通りとなる。
・ 保護制御手段12〜プロセスバス通信手段11:図24の矢印TR11
・ プロセスバス通信手段11からプロセスバスP−NET1:図24の矢印TR12
・ プロセスバスP−NET1内:図22矢印TR13
・ プロセスバス通信手段315〜駆動制御手段312:図22矢印14
【0160】
以上、TR11〜TR14において、いくつかの手段と伝送路を経由するため、制御指令を複数ビットで表現したコマンドのデータ品質はきわめて重要である。発信元から最終受信元までに、いくつかの手段と伝送路ある場合、それらの手段や伝送路の一部不良(一過性不良含む)により、コマンドにビットエラーが発生する割合が増し、エラービットを含んだコマンドにより、最終段の誤った制御出力Yになる割合も増す。
【0161】
これを回避するために、ディジタル形保護制御装置1E内の例えば保護制御手段12で所定のルールによりコマンドを構成し、最終段の駆動制御手段312で前記ルールに基づきエラーチェックする。エラーチェックと処理方法は第12の実施形態と同様である。尚、本実施形態では、プロセスバスP−NET1経由でコマンドのエラーをディジタル形保護制御装置1Eに通知する形態となる。
【0162】
(第13の実施形態の特徴)
第12の実施形態と同様の特徴を有するが、特に、保護又は制御装置から機器制御装置への制御指令はプロセスバスP―NETを介す。その間にはルータやHUB等の通信中継機器も存在する。よって、本実施形態により、制御指令の送信元から最終末端の受信元(機器制御装置)までの一環した制御指令のデータ品質を保つことが可能である。
【0163】
(第1〜第13の実施形態の特徴のまとめ)
上記実施形態によれば、従来、保護制御装置に実装していた変電機器本体間とのアナログ入出力回路が削除でき、且つ、入出力が全て通信手段経由となり、大電圧、大電流を扱う回路が存在しなくなるため、ハードウェア構成としては、保護制御機能を処理するためのディジタル演算処理部と通信処理を行う通信部のみで構成することができ、大幅にハードウェアの削減が可能となり、装置の小形化および電気ケーブルの大幅削減が可能となる。
【0164】
また、装置の小型化により、変電機器本体への組込みも可能となる。更に、各ユニットにディジタル演算プロセッサを備えてディジタル化を図ったので、各ユニットおよび変電機器本体の自己診断が可能となる。また、各ユニットを通信手段で結合したことにより様々な情報の有効活用も可能となり、保守運用性および経済性を大きく向上させることが可能となる。
【0165】
さらに、保護制御手段と、ディジタルデータ統合手段、機器制御装置用通信手段およびプロセスバス通信手段との一部又は全部を共通又は個別のパラレル伝送媒体で結合したので、ディジタル形保護制御装置内の伝送高速化が可能になり、変電機器本体の保護および監視制御のリアルタイム性を確保することができる。
【0166】
また、保護制御手段と、ディジタルデータ統合手段、機器制御装置用通信手段およびプロセスバス通信手段を備えたディジタル形保護制御装置の個別発明を提案し、これによれば、保護制御の時間性能や事故応動など装置として必要な性能スペックを向上させることが可能になる。
【0167】
【発明の効果】
以上のように本発明によれば、機器内でのデータ送受を効率よく行うことで、保護制御性能を向上させるディジタル形保護制御装置を提供することができる。
【図面の簡単な説明】
【図1】 第1の実施形態の機能構成及びシステム構成例
【図2】 変電機器と設置形態の一例
【図3】 マルチマスタ伝送方式の具体例(その1)
【図4】 マルチマスタ伝送方式の具体例(その2)
【図5】 保護制御手段の機能分割例
【図6】 第1の実施形態の機能構成(変形例その1)
【図7】 第1の実施形態の機能構成(変形例その2)
【図8】 ディジタル形保護制御装置の構成形態(その1)
【図9】 ディジタル形保護制御装置の構成形態(その2)
【図10】 第2の実施形態におけるシングルマスタ伝送方式の具体例(その1)
【図11】 第2の実施形態におけるシングルマスタ伝送方式の具体例(その2)
【図12】 第3の実施形態の機能構成例
【図13】 第4の実施形態の機能構成例
【図14】 第5の実施形態の機能構成例
【図15】 第5の実施形態における同期信号の生成例
【図16】 第6の実施形態の機能構成例
【図17】 第7の実施形態の方法模式図
【図18】 第8の実施形態の方法模式図
【図19】 第9の実施形態の機能構成例(その1)
【図20】 第9の実施形態の機能構成例(その2)
【図21】 第10の実施形態の機能構成例
【図22】 第11の実施形態の構成及び方法説明図
【図23】 第12の実施形態における制御指令の伝送経路の説明図
【図24】 第13の実施形態における制御指令の伝送経路の説明図
【図25】 従来の変電所内の変電機器保護制御システム構成例
【図26】 通信手段で結合した変電機器保護制御システム構成
【符号の説明】
1:ディジタル形保護制御装置、 11:プロセスバス通信手段、 12:保護制御手段、 13:ディジタルデータ統合手段、 14:機器制御装置用通信手段、 16:バスマスター手段、 2−1〜2−n:センサーユニット、 3−1〜3−n:機器制御装置、 P−BUS:パラレルバス、 P−NET:プロセスバス、 S−NET:ステーションバス、 SC:ディジタルデータ統合手段13とセンサーニット2−1〜2−n間の1対1通信路(n本)、 CC:機器制御装置用通信手段14と機器制御装置3−1〜3−n間の1対1通信路(n本)、 X1:変電機器本体、 X11:母線、 X12:送電線、 X14:遮断器、 X13a:母線側送電線に設置の電流変成器、 X13b:送電線側に設置の電流変成器、 a1:電流変成器X13aから取り込むアナログ電流量、 a2:電流変成器X13bら取り込むアナログ電流量、 b1:遮断器X14を制御する制御出力(下り信号)と機器状態値(上り信号)、 7:プロセス制御箱、 DS:断路器、 ES:接地開閉器、 CT:電流変成器、 VT:電圧変成器、 TA:タンク、 CB:遮断器、 B:ベース、 A1〜A4:マルチマスター伝送時のマスターとスーブ間の伝送方向例(その1)、 B1〜B2:マルチマスター伝送時のマスターとスーブ間の伝送方向例(その2)、121:保護手段、 122:制御手段、 P−BUS1:保護制御手段12と機器制御装置用通信手段14間の専用パラレルバス、 S−BUS:保護制御手段12と機器制御装置用通信手段14間の専用シリアルバス、 P−BUS11:保護手段121と機器制御装置用通信手段14a間の専用パラレルバス、 P−BSU12:制御手段122と機器制御装置用通信手段14b間の専用パラレルバス、 S−BUS1:保護手段121と機器制御装置用通信手段14a間の専用シリアルバス、 S−BUS2:制御手段122と機器制御装置用通信手段14b間の専用シリアルバス、 14a:保護用の機器制御装置用通信手段、14b:制御用の機器制御装置用通信手段、 1a〜1f:各ベイを保護するディジタル形保護制御装置、 DX−A:ディジタル形保護制御盤、 1C:ディジタル形保護制御装置の収納ラック、 CASE−A、CASE−B1、CASE−B2、CASE−C、CASE−D:ディジタル形保護制御装置のラック構成例、 C1、C2:シングルマスタ伝送方式における伝送方向例、 111:通信制御手段、 112:ブリッジ、 P−BUS2:ブリッジ112と通信制御手段111間の伝送バス、 110:プロセスバス通信手段11の記憶部、120:保護制御手段12の記憶部、 130:ディジタルデータ統合手段13の記憶部、 140:機器制御装置用通信手段14の記憶部、 4:サンプリングマスター手段、 SS:サンプリングマスター手段4からの基準信号、 131:同期信号生成手段、 132:分周手段132、 SSP:保護リレー演算用周期信号、 SC1−DT:センサユニット2−1からの変電機器本体の主回路交流電気量のディジタルデータ、 SC1―SP:センサユニット2−1へのサンプリング信号、 E11:基準信号SSの立下りエッジ、 E12:信号SC1−SPの立下りエッジ、 EW:基準信号SSと信号SC1−SPの同期すれ量、 141:同期信号生成手段、 PPS:時刻同期用基準信号、 CC1−DT:機器制御装置3−1への制御指令を意味する制御信号、 ST:スタートビット又はスタートフラグシーケンス、 DATA1〜DATA3:制御指令(複数ビットの2進で構成)、 TSS:時刻同期用信号の生成例、 TA1〜TA3:スタートビットST開始を起点とする時刻同期タイミング、 TSS−A:タイミングTA1〜TA3で生成した時刻同期信号、 TB1〜TB3:スタートビットST認識完了時点を起点とする時刻同期タイミング、 TSS−B:タイミングTB1〜TB3で生成した時刻同期信号、 ST−1:信号CC1−DTXの制御指令DATA1のスタートフラグシーケンス、 ST−2:信号CC1−DTXの制御指令DATA2のスタートフラグシーケンス、 CC1−DTX:オーバサンプリング送信による機器制御装置3−1への制御指令を意味する制御信号の巡回式送信信号、 TSS−C:時刻同期フラグF1認識時点で同期をとる同期信号、 TC1:時刻同期フラグF1の認識時点、 TC2:時刻同期フラグF2の認識時点、 F1:制御指令DATA1に付加した時刻同期フラグ、 F2:制御指令DATA2に付加した時刻同期フラグ、 17:入出力手段、 M:メタルワイヤ群、 3A:従来形機器制御装置、 DO:出力部、 DI:入力部、 DR:リレー駆動ドライバ、 P5:ディジタル形保護制御装置内の電源(+)、 GND:ディジタル形保護制御装置内の電源(−)、 P110:変電所内の制御電源(+)、 N:変電所内の制御電源(―)、RY1:ミニチュア継電器、 RY2:パワー継電器(又はスイッチング継電器)、 PH:フォットカプラ、 R:感度調整用分圧抵抗、 P−BUS3:保護制御手段12と入出力手段17間の専用パラレルバス、 S−BUS3:保護制御手段12と入出力手段17間の専用シリアルバス、 17a:外部の入出力手段、 1F:ディジタル形保護制御装置の収納ラック、 HE:温度センサ、 UH:収納ラック1F上面の通風孔、 LH:収納ラック1F底面の通風孔、 W1〜W4:送風の流れ摸式図、 B1、B2:プリント基板、 P1:光部品、 Y1X、Y2X、Y1O、Y2O:プリント基板B2上の実装部品、 XE1:送風が阻害される例、 XE2:送風の通風路を確保した例、 XE3:送風を効率的に実施する例、 FAN1:送風部、 SH1:偏向板、 α:偏向角度、 6:送風手段、 124:保護制御手段12の演算部、 125:保護制御手段12のバス伝送手段、 143:機器制御装置用通信手段14のバス伝送手段、 144:機器制御装置用通信手段14の演算部、 146:機器制御装置用通信手段14内の伝送バス、 145:機器制御装置用通信手段14のシリアル伝送手段、 CC1:機器制御装置用通信手段14と機器制御装置3−1間の1対1通信路、 311:機器制御装置3−1のシリアル伝送手段、 312:機器制御装置3−1の駆動制御手段、 313:機器制御装置3−1のドライバ、 PD:シリアル伝送手段311と駆動制御手段312間の伝送バス、 SD:駆動信号、 314:パワー継電器、 Y:制御出力、 TR1〜TR6:第12の実施形態における制御指令の伝送経路、 TR11〜TR14:第13の実施形態における制御指令の伝送経路、 HR:HUB又はルータ、 Z1:従来システムにおける制御本館、 Z2:従来システムにおける遠方制御装置、 Z3:従来システムにおける集中監視装置、 Z4:従来システムの監視制御装置、 Z5−1〜Z5−n:従来システムの回線制御装置、 Z6−1〜Z6−n:従来システムの保護装置、 Z7:従来システムのステーションバス、 Z8−1〜Z8−n:変電機器本体、 Z9−1〜Z9−n:現場制御装置、 Z10:電流変成器、 Z11:電圧変成器、 Z12:開閉器、 Z13:母線、 Z14:送電線、 Z15〜Z17:電気ケーブル(メタルワイヤ)、 Z20−1〜Z20―n:変電機器保護制御システム、 Z21−1:回線制御ユニット、 Z22−1:保護制御ユニット、 Z23−1:保護制御ユニット、 Z24:母線、 Z25:開閉器、 Z26:送電線、 Z27:電流変成器、 Z28:センサユニット、 Z29:プロセスバス、 Z30:機器制御装置、 Z31:ディジタルデータ統合ユニット、 ZZ:ディジタル形保護制御装置に収納される範囲
Claims (2)
- 変電機器本体の主回路交流電気量を検知する単一または複数のセンサーユニットにおいて前記電気量をA/D変換したディジタルデータを通信手段によりシリアルに入力し、統合するディジタルデータ統合手段と、
前記ディジタルデータ統合手段から出力されるディジタルデータに基づいて、前記変電機器本体の保護および制御を行う制御信号を出力する保護制御手段と、
前記変電機器本体を制御する単一または複数の機器制御装置から出力された機器監視データを前記保護制御手段へ、前記保護制御手段から出力された制御信号を前記機器制御装置へと通信手段により送信する機器制御装置用通信手段と、
前記保護制御手段、前記機器制御装置用通信手段、前記ディジタルデータ統合手段の少なくとも一部と、他のディジタル形保護制御装置または変電機器のプロセスバスとの間で電気量をシリアルにデータを中継するプロセスバス通信手段と、
前記ディジタルデータ統合手段、前記保護制御手段、前記機器制御装置用通信手段、前記プロセスバス通信手段間の少なくとも一部を結合するパラレル伝送媒体と、を具備し、
前記ディジタルデータ統合手段、前記保護制御手段、前記機器制御装置用通信手段、前記プロセスバス通信手段間の少なくとも一部でのデータ送受をマルチマスター方式により行い、
前記保護制御手段は識別データが周期的に付加された前記制御信号を所定の周期で送信し、前記機器制御装置は受信した前記制御信号への識別データが所定の値であることを検出してタイミングを生成し、このタイミングにより前記変電機器本体の制御が行われることを特徴とするディジタル形保護制御装置。 - 請求項1に記載のディジタル形保護制御装置において、
前記ディジタルデータ統合手段、前記保護制御手段、前記機器制御装置用通信手段、前記プロセスバス通信手段間のデータ送受の少なくとも一部を前記マルチマスター方式に換えて、シングルマスター方式で行うことを特徴とするディジタル形保護制御装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002229102A JP3930394B2 (ja) | 2002-08-06 | 2002-08-06 | ディジタル形保護制御装置 |
| AU2003204982A AU2003204982B2 (en) | 2002-08-06 | 2003-06-26 | Digital protection and control device |
| US10/608,377 US6954704B2 (en) | 2002-08-06 | 2003-06-30 | Digital protection and control device |
| FR0309644A FR2843639B1 (fr) | 2002-08-06 | 2003-08-05 | Dispositif de protection et de commande numerique |
| CNB031275192A CN1272680C (zh) | 2002-08-06 | 2003-08-06 | 数字式保护控制装置 |
| JP2007025401A JP4227177B2 (ja) | 2002-08-06 | 2007-02-05 | ディジタル形保護制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002229102A JP3930394B2 (ja) | 2002-08-06 | 2002-08-06 | ディジタル形保護制御装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007025401A Division JP4227177B2 (ja) | 2002-08-06 | 2007-02-05 | ディジタル形保護制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004072905A JP2004072905A (ja) | 2004-03-04 |
| JP2004072905A5 JP2004072905A5 (ja) | 2005-09-22 |
| JP3930394B2 true JP3930394B2 (ja) | 2007-06-13 |
Family
ID=31185120
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002229102A Expired - Fee Related JP3930394B2 (ja) | 2002-08-06 | 2002-08-06 | ディジタル形保護制御装置 |
| JP2007025401A Expired - Fee Related JP4227177B2 (ja) | 2002-08-06 | 2007-02-05 | ディジタル形保護制御装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007025401A Expired - Fee Related JP4227177B2 (ja) | 2002-08-06 | 2007-02-05 | ディジタル形保護制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6954704B2 (ja) |
| JP (2) | JP3930394B2 (ja) |
| CN (1) | CN1272680C (ja) |
| AU (1) | AU2003204982B2 (ja) |
| FR (1) | FR2843639B1 (ja) |
Families Citing this family (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10244845A1 (de) * | 2002-09-20 | 2004-04-08 | Siemens Ag | Anordnung zum Steuern und Überwachen einer Schaltanlage |
| US20040059829A1 (en) * | 2002-09-24 | 2004-03-25 | Chu Thomas P. | Methods and devices for converting routing data from one protocol to another in a virtual private network |
| US20050146824A1 (en) * | 2003-12-29 | 2005-07-07 | Lear Corporation | Active Safety Circuit with Loads Protected by Solid State Relays |
| JP2005269759A (ja) * | 2004-03-18 | 2005-09-29 | Meidensha Corp | サンプリング同期方式および時間管理方式 |
| US7638999B2 (en) * | 2006-04-07 | 2009-12-29 | Cooper Technologies Company | Protective relay device, system and methods for Rogowski coil sensors |
| US7564233B2 (en) * | 2006-11-06 | 2009-07-21 | Cooper Technologies Company | Shielded Rogowski coil assembly and methods |
| US7538541B2 (en) * | 2006-11-06 | 2009-05-26 | Cooper Technologies Company | Split Rogowski coil current measuring device and methods |
| WO2009010084A1 (de) * | 2007-07-16 | 2009-01-22 | Siemens Aktiengesellschaft | Datenkonzentrator, redundantes schutzsystem und verfahren zum überwachen eines schutzobjektes in einem elektrischen energieversorgungsnetz |
| US7916508B2 (en) * | 2007-12-05 | 2011-03-29 | General Electric Company | Systems and methods involving thyristors |
| US7738221B2 (en) * | 2007-12-07 | 2010-06-15 | Cooper Technologies Company | Transformer inrush current detector |
| JP5258286B2 (ja) * | 2007-12-28 | 2013-08-07 | 三菱電機株式会社 | デジタル電流差動保護継電器 |
| US7685325B2 (en) * | 2008-01-04 | 2010-03-23 | International Business Machines Corporation | Synchronous bus controller system |
| US8892775B2 (en) * | 2008-05-27 | 2014-11-18 | International Business Machines Corporation | Apparatus, system, and method for redundant device management |
| US7948420B1 (en) | 2008-06-20 | 2011-05-24 | Arrowhead Center, Inc. | Eliminating the use of anti-aliasing filters in digital relays by oversampling |
| JP5539997B2 (ja) * | 2008-10-09 | 2014-07-02 | アレヴァ・ティー・アンド・ディー・ユー・ケー・リミテッド | 電力系統におけるマージングユニットの動的な信号の切り替え方法及び装置 |
| JP5248269B2 (ja) * | 2008-10-31 | 2013-07-31 | 株式会社東芝 | 遮断器の開閉制御装置、及び遮断器の開閉制御システム |
| JP5349292B2 (ja) * | 2009-01-28 | 2013-11-20 | 株式会社東芝 | 変電所監視制御システムにおけるデータ伝送方式とサーバ |
| JP5153693B2 (ja) * | 2009-03-13 | 2013-02-27 | 東芝三菱電機産業システム株式会社 | データ収集システム |
| EP2273644A1 (en) * | 2009-07-07 | 2011-01-12 | ABB Research Ltd. | Substation automation system with protection functions |
| ITBG20090051A1 (it) * | 2009-09-30 | 2011-04-01 | Abb Spa | Rete di comunicazione per un quadro elettrico di bassa tensione. |
| CN102763297B (zh) | 2009-11-05 | 2014-10-08 | 阿尔斯托姆技术有限公司 | 监视智能电子设备的时间-电流特性之间的分级裕量的方法 |
| JP5140113B2 (ja) * | 2010-05-10 | 2013-02-06 | 三菱電機株式会社 | 電子制御装置 |
| JP2012010461A (ja) * | 2010-06-23 | 2012-01-12 | Toshiba Corp | 統合ユニット、変成器、制御装置 |
| WO2012127058A1 (en) * | 2011-03-24 | 2012-09-27 | Schneider Electric Energy Gmbh | Merging unit and method of operating a merging unit |
| US8868360B2 (en) * | 2011-04-29 | 2014-10-21 | General Electric Company | System and device for detecting defects in underground cables |
| JP5802438B2 (ja) * | 2011-05-31 | 2015-10-28 | 株式会社日立製作所 | 設備管理装置、電力設備管理システム、および、設備管理方法 |
| DE102011105735A1 (de) * | 2011-06-24 | 2012-12-27 | Infratec Datentechnik Gmbh | Ansteuerungssystem |
| JP5592849B2 (ja) * | 2011-08-04 | 2014-09-17 | 株式会社日立製作所 | ディジタル保護継電装置 |
| JP5926540B2 (ja) * | 2011-11-11 | 2016-05-25 | 株式会社東芝 | 保護制御システムおよびマージングユニット |
| JP5926539B2 (ja) * | 2011-11-11 | 2016-05-25 | 株式会社東芝 | 保護制御システム、保護制御装置、およびマージングユニット |
| US9766278B2 (en) * | 2012-01-12 | 2017-09-19 | Cirrus Logic, Inc. | Three phase power quality measurement using asynchronous, isolated single phase circuits |
| JP5752845B2 (ja) * | 2012-02-21 | 2015-07-22 | 株式会社東芝 | 統合ユニット及び保護リレーシステム |
| JP6105236B2 (ja) * | 2012-09-11 | 2017-03-29 | 三菱電機株式会社 | マージングユニット |
| ES2623537T3 (es) * | 2012-09-28 | 2017-07-11 | Enrichment Technology Company Ltd. | Instalación de almacenamiento de energía y comunicación de módulo |
| US9869997B2 (en) * | 2013-02-15 | 2018-01-16 | General Electric Company | Protection monitoring system with fault indicators |
| JP5733327B2 (ja) * | 2013-02-27 | 2015-06-10 | 株式会社デンソー | 通信ノード |
| US9442999B2 (en) * | 2013-06-07 | 2016-09-13 | Eaton Corporation | Method and system employing graphical electric load categorization to identify one of a plurality of different electric load types |
| CN103472808B (zh) * | 2013-09-24 | 2015-08-26 | 河南兵峰电子科技有限公司 | 生态智能农业系统及其开关量控制装置 |
| JP2016081389A (ja) * | 2014-10-20 | 2016-05-16 | 株式会社キーエンス | プログラマブル・ロジック・コントローラおよびバス変換ユニット |
| JP6483998B2 (ja) * | 2014-10-20 | 2019-03-13 | 株式会社キーエンス | プログラマブル・ロジック・コントローラおよび変換ユニット |
| EP3112884B1 (en) * | 2015-06-30 | 2023-08-30 | ABB s.r.o. | Parameterizable merging unit for sensor-based measurement, and method to operate such unit |
| CN106411790B (zh) | 2016-09-29 | 2019-07-23 | 北京东土科技股份有限公司 | 基于智能变电站保护控制系统的数据传输方法 |
| KR102584787B1 (ko) * | 2023-06-19 | 2023-10-05 | (주)경문기술단 | 전력 계통 보호 계전기의 모니터링장치 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0257414A3 (en) * | 1986-08-22 | 1989-05-24 | Hewlett-Packard Company | Fast error detection/correction for command signals |
| JP2550957B2 (ja) * | 1986-09-24 | 1996-11-06 | 株式会社明電舎 | デイジタル形保護継電装置 |
| JP2903086B2 (ja) * | 1987-06-03 | 1999-06-07 | 株式会社日立製作所 | ディジタル保護リレー |
| JPH01202113A (ja) * | 1988-02-05 | 1989-08-15 | Hitachi Ltd | デジタル保護リレー装置 |
| JP2694993B2 (ja) | 1989-02-22 | 1997-12-24 | 株式会社日立製作所 | 電力用信号処理システムおよびディジタル保護リレー装置 |
| US6694270B2 (en) * | 1994-12-30 | 2004-02-17 | Power Measurement Ltd. | Phasor transducer apparatus and system for protection, control, and management of electricity distribution systems |
| AU707433B2 (en) * | 1996-12-03 | 1999-07-08 | Kabushiki Kaisha Toshiba | Electric power system protection and control system and distributed control system |
| US5995911A (en) * | 1997-02-12 | 1999-11-30 | Power Measurement Ltd. | Digital sensor apparatus and system for protection, control, and management of electricity distribution systems |
| JP3352411B2 (ja) * | 1998-03-05 | 2002-12-03 | 株式会社東芝 | 制御システム、電力系統保護制御システムおよびプログラムを記憶した記憶媒体 |
| JP2000029822A (ja) * | 1998-07-15 | 2000-01-28 | Matsushita Electric Ind Co Ltd | ブリッジ装置 |
| JP3829020B2 (ja) * | 1998-10-22 | 2006-10-04 | 株式会社東芝 | 電力系統保護制御システム、電力系統保護制御システムの制御方法およびプログラムモジュールを記憶した記憶媒体 |
| US6405104B1 (en) | 1999-03-24 | 2002-06-11 | General Electric Corporation | Fault data synchronization via peer-to-peer communications network |
| JP4377542B2 (ja) * | 2000-10-20 | 2009-12-02 | 株式会社東芝 | 高電圧機器の内部部分放電監視装置 |
| JP3773784B2 (ja) * | 2000-11-10 | 2006-05-10 | 株式会社東芝 | ディジタル形保護制御装置 |
| AU2001230069A1 (en) * | 2000-11-29 | 2002-06-11 | Abb T And D Technology Ltd | An improved protection and control system |
| US7159054B2 (en) * | 2000-11-29 | 2007-01-02 | Abb T&D Technology Ltd. | System and method for digital protection and control device for a power distribution network |
| US7062359B2 (en) * | 2000-12-29 | 2006-06-13 | Abb Ab | Substation control system |
| JP3907998B2 (ja) * | 2001-02-09 | 2007-04-18 | 株式会社東芝 | 変電機器保護制御システム |
-
2002
- 2002-08-06 JP JP2002229102A patent/JP3930394B2/ja not_active Expired - Fee Related
-
2003
- 2003-06-26 AU AU2003204982A patent/AU2003204982B2/en not_active Ceased
- 2003-06-30 US US10/608,377 patent/US6954704B2/en not_active Expired - Lifetime
- 2003-08-05 FR FR0309644A patent/FR2843639B1/fr not_active Expired - Fee Related
- 2003-08-06 CN CNB031275192A patent/CN1272680C/zh not_active Expired - Fee Related
-
2007
- 2007-02-05 JP JP2007025401A patent/JP4227177B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| AU2003204982B2 (en) | 2005-04-14 |
| JP2004072905A (ja) | 2004-03-04 |
| JP4227177B2 (ja) | 2009-02-18 |
| CN1484120A (zh) | 2004-03-24 |
| US6954704B2 (en) | 2005-10-11 |
| CN1272680C (zh) | 2006-08-30 |
| FR2843639A1 (fr) | 2004-02-20 |
| US20040027750A1 (en) | 2004-02-12 |
| JP2007151394A (ja) | 2007-06-14 |
| FR2843639B1 (fr) | 2006-04-07 |
| AU2003204982A1 (en) | 2004-02-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3930394B2 (ja) | ディジタル形保護制御装置 | |
| US6845301B2 (en) | System for protecting and controlling substation main circuit components | |
| JP4575347B2 (ja) | 変電機器保護制御システム | |
| JP4575480B2 (ja) | 変電機器保護制御システム | |
| AU2007214320B2 (en) | Protection and control system for electric power networks with signal and command interfaces at the primary equipment | |
| US7027896B2 (en) | Integrated protection and control system for a power system substation | |
| CN101291081A (zh) | 用于配电系统的数据采样和传输模块 | |
| JP2007288921A (ja) | 開閉装置制御・監視システム | |
| KR20080100295A (ko) | 변전소 자동화를 위한 게이트웨이 구조 | |
| US20040104784A1 (en) | Wide area network as applied to switchyard/substation control design | |
| JP3959360B2 (ja) | 電力系統保護制御システム | |
| WO2003090397A2 (en) | Wide area network as applied to switchyard/substation control design | |
| JP3808891B2 (ja) | ディジタル形保護制御装置 | |
| JP2001157381A (ja) | 変電機器制御監視装置 | |
| KR100870938B1 (ko) | 통신망을 이용한 경량 전철용 직류 배전반 시스템 | |
| RU2414720C2 (ru) | Устройство управления и защиты присоединений переменного тока системы тягового электроснабжения и система управления тяговой подстанцией с использованием устройств управления и защиты присоединений переменного тока | |
| CN100521431C (zh) | 一种基于电流差动原理的集成保护系统 | |
| JP2003018767A (ja) | 監視制御システム | |
| WO2023031995A1 (ja) | リレーユニット、電気所システム、および電気所システムの更新方法 | |
| JP4670810B2 (ja) | 電力線搬送通信システム及び信号中継装置 | |
| JP2002078182A (ja) | 電力系統のディジタル保護制御装置 | |
| CN114977472A (zh) | 一种轨道交通区间的供电方法及系统 | |
| JPS5980116A (ja) | 環線系統の保護継電装置 | |
| Smith et al. | Fully utilizing the IED capability to reduce wiring | |
| JPH11164430A (ja) | 変電機器監視制御盤 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20040804 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050412 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050412 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20050721 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060807 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060815 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061016 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070205 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070306 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070308 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 3930394 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100316 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110316 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120316 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130316 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130316 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140316 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |