JP2017215642A - 監視システム - Google Patents
監視システム Download PDFInfo
- Publication number
- JP2017215642A JP2017215642A JP2016107161A JP2016107161A JP2017215642A JP 2017215642 A JP2017215642 A JP 2017215642A JP 2016107161 A JP2016107161 A JP 2016107161A JP 2016107161 A JP2016107161 A JP 2016107161A JP 2017215642 A JP2017215642 A JP 2017215642A
- Authority
- JP
- Japan
- Prior art keywords
- light
- monitoring
- background
- distance
- intensity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Optical Radar Systems And Details Thereof (AREA)
- Burglar Alarm Systems (AREA)
Abstract
【課題】例えば最高次の反射光を使って背景差分により物体検出を行う監視システムにおいて、太陽光などの影響をできるだけ回避して、検出処理を継続することができる監視システムを提供する。【解決手段】監視システムは、監視空間における背景光の強度を画素毎に検出する検出装置を有し、処理部は、前記投受光ユニットから同一投受光方向における基準背景までの距離Aと、対象物までの距離Bとの差分(A−B)が閾値Cを超えている場合、監視対象物と認定するようになっており、前記検出装置が検出した前記背景光の強度に基づいて前記閾値を設定する。【選択図】図6
Description
本発明は、例えばレーザ光等を走査投光して物体を監視する監視システムに関する。
監視空間への侵入者等を検出する監視装置として、距離画像を用いるものが提案されている。ここで距離画像とは、画素値として距離情報を有するものである。具体的には、特許文献1に示すように、レーザ光等を監視空間へ向けて送出し、その送出から反射光の受光までの時間などから監視空間内の対象物までの距離を計測する監視装置が知られている。かかる監視装置では、レーザ光等の測定媒体の送出方向を順次変えて監視空間内を二次元的に走査することにより、監視空間を向いた複数の方向に関する距離情報を得ることができ、これにより距離画像を形成できる。
距離画像を用いた監視装置では、移動物体が存在しない背景となる距離画像(背景画像)を予め求め、得られた背景画像と、入力された距離画像(現画像)とを比較し、背景画像より近い距離に相当する画素を抽出して変化領域を求める,いわゆる背景差分法が用いられる。これにより、変化領域の大きさ・形状及び現画像における距離情報に基づいて、移動物体が目的とする検知対象物であるか否かを判定することができる。
距離画像は、レーザ光束等の送受部から見た物体の方向と、当該物体までの距離という情報を有する。よって、距離画像により、物体の大きさ・形状を知ることができ、例えば、侵入者検知の用途においては、遠方の比較的大きな人物と近傍の小動物(鼠や猫等)とを区別することが可能となり、侵入者の検出精度を向上させることができる。
ところで、早朝や夕暮れなど太陽の高度が低くなることで、監視空間に太陽が入り込む場合がある。しかるに、太陽光には一般的に監視装置で用いるレーザ光束と同じ帯域の成分が含まれているため、太陽光が監視装置に入射することにより誤検出を引き起こす恐れがある。又、監視空間内に太陽が存在しない場合でも、反射物に反射した太陽光が間接的に監視装置に入射すると、同様に誤検出を引き起こす恐れがある。
これに対し特許文献2には、対象物の誤検出を招く恐れがある高い強度の背景光(太陽光等)の入射を検出した場合、フェールランプの点灯などでドライバーへアラートする或いは距離測定を中断することができる車載用の距離測定装置が開示されている。ここで特許文献2の距離測定装置は、危険回避の判断を最終的にドライバーに委ねることが原則である車載用途においては、ドライバーの判断を支援する情報を可能な限り提供するという意味では一定の有用性がある。しかしながら、不審者や不審物の侵入を監視するための監視用途、特に重要施設向けの監視装置に特許文献2の技術を転用した場合、太陽光が入射したことで測定を中断してしまうと、それにより監視機能が失われてしまい問題である。すなわち、一般的な監視装置においては、例え太陽光が入射するような悪条件下でも、検出処理を可能な限り継続することが望まれる。かかる問題は、太陽光に限らず、比較的高い強度の背景光が入射した場合にも同様に生じるといえる。
本発明は、上記事情に鑑みなされたものであり、例えば最高次の反射光を使って背景差分により物体検出を行う監視システムにおいて、太陽光などの影響をできるだけ回避して、検出処理を継続することができる監視システムを提供することを目的とする。
本発明の監視システムは、
光束を出射する出射部と、前記光束を監視空間内で走査する走査部と、前記監視空間内の対象物から反射した光束を受光する受光部とを備えた投受光ユニットと、
前記投受光ユニットからの信号を処理することで、前記対象物までの距離を測定する処理部と、
前記監視空間における背景光の強度を検出する検出装置と、を有する監視システムであって、
前記処理部は、前記検出装置が検出した前記背景光の強度に基づいて閾値Cを設定し、前記投受光ユニットから同一投受光方向における基準背景までの距離Aと、前記対象物までの距離Bとの差分(A−B)が前記閾値Cを超えている場合、監視対象物と認定するものである。
光束を出射する出射部と、前記光束を監視空間内で走査する走査部と、前記監視空間内の対象物から反射した光束を受光する受光部とを備えた投受光ユニットと、
前記投受光ユニットからの信号を処理することで、前記対象物までの距離を測定する処理部と、
前記監視空間における背景光の強度を検出する検出装置と、を有する監視システムであって、
前記処理部は、前記検出装置が検出した前記背景光の強度に基づいて閾値Cを設定し、前記投受光ユニットから同一投受光方向における基準背景までの距離Aと、前記対象物までの距離Bとの差分(A−B)が前記閾値Cを超えている場合、監視対象物と認定するものである。
本発明によれば、例えば最高次の反射光を使って背景差分により物体検出を行う監視システムにおいて、太陽光などの影響をできるだけ回避して、検出処理を継続することができる監視システムを提供することができる。
以下、添付した図面を参照しながら、本発明の実施形態を説明する。図1は、本実施の形態にかかる監視システムとしての監視装置MDの断面図であるが、構成要素の形状や長さ等、実際と異なる場合がある。
監視装置MDは、例えば、レーザ光束を出射するパルス式の半導体レーザLDと、半導体レーザLDからの発散光を平行光に変換するコリメートレンズCLと、コリメートレンズCLで平行とされたレーザ光を、回転するミラー面により監視空間に向かって走査投光すると共に、対象物からの反射光を反射させるミラーユニットMUと、ミラーユニットMUで反射された対象物からの反射光を集光するレンズLSと、レンズLSにより集光された光を受光するフォトダイオードPDと、半導体レーザLDの出射タイミングとフォトダイオードPDの受光タイミングとの時間差に応じて距離情報を求める処理回路(処理部)PROCと,ミラーユニットMUを回転駆動するモータMTと、これらを収容する筐体CSとを有する。フォトダイオードPDは、Z方向に並んだ複数の画素を有する。
本実施の形態において、半導体レーザLDとコリメートレンズCLとで出射部LPSを構成し、レンズLSとフォトダイオードPDとで受光部RPSを構成し、ミラーユニットMUが走査部を構成し、更にこれらで投受光ユニットを構成する。出射部LPS、受光部RPSの光軸は、ミラーユニットMUの回転軸ROに対して直交していると好ましい。
剛体である壁WL等に固定されたボックス状の筐体CSは、上壁CSaと、これに対向する下壁CSbと、上壁CSaと下壁CSbとを連結する側壁CScとを有する。側壁CScの一部に開口CSdが形成され、開口CSdには透明板TRが取り付けられている。
ミラーユニットMUは、2つの四角錐を逆向きに接合して一体化した形状を有し、すなわち対になって向き合う方向に傾いたミラー面M1、M2を4対(但し4対に限られない)有している。ミラー面M1、M2は、ミラーユニットの形状をした樹脂素材(例えばPC)の表面に、反射膜を蒸着することにより形成されていると好ましい。
ミラーユニットMUは、筐体CSに固定されたモータMTの軸MTaに連結され、回転駆動されるようになっている。本実施の形態では、軸MTaの軸線(回転軸線)が鉛直方向であるZ方向に延在しており、Z方向に直交するX方向及びY方向によりなすXY平面が水平面となっているが、軸MTaの軸線を鉛直方向に対して傾けても良い。
次に、監視装置MDの対象物検出原理について説明する。図1において、半導体レーザLDからパルス状に間欠的に出射された発散光は、コリメートレンズCLで平行光束に変換され、回転するミラーユニットMUの第1ミラー面M1に入射し、ここで反射され、更に第2ミラー面M2で反射した後、透明板TRを透過して外部の監視空間に向けて、例えば縦長の矩形断面を持つレーザスポット光として走査投光される。尚、出射されたレーザスポット光が対象物で反射し、反射光として戻ってくる方向を投受光方向という。同一投受光方向に進行するレーザスポット光束は、同一の画素で検出される。
図2は、ミラーユニットMUの回転に応じて、出射するレーザスポット光SB(ハッチングで示す)で、監視装置MDの監視空間内を走査する状態を示す図である。ここで、ミラーユニットMUの第1ミラー面M1と第2ミラー面M2の組み合わせにおいて、それぞれ交差角が異なっている。レーザ光は、回転する第1ミラー面M1と第2ミラー面M2にて、順次反射される。まず1番対の第1ミラー面M1と第2ミラー面M2にて反射したレーザ光は、ミラーユニットMUの回転に応じて、監視空間の一番上の領域Ln1を水平方向に左から右へと走査される。次に、2番対の第1ミラー面M1と第2ミラー面M2で反射したレーザ光は、ミラーユニットMUの回転に応じて、監視空間の上から二番目の領域Ln2を水平方向に左から右へと走査される。次に、3番対の第1ミラー面M1と第2ミラー面M2で反射したレーザ光は、ミラーユニットMUの回転に応じて、監視空間の上から三番目の領域Ln3を水平方向に左から右へと走査される。次に、4番対の第1ミラー面M1と第2ミラー面で反射したレーザ光は、ミラーユニットMUの回転に応じて、監視空間の最も下の領域Ln4を水平方向に左から右へと走査される。これにより監視装置MDが監視可能な監視空間全体の1回の走査が完了する。この領域Ln1〜Ln4の走査により得られた画像を組み合わせて、1つのフレームFLが得られることとなる。そして、ミラーユニットMUが1回転した後、1番対の第1ミラー面M1と第2ミラー面M2が戻ってくれば、再び監視空間の一番上の領域Ln1から最も下の領域Ln4までの走査を繰り返し、次のフレームFLが得られる。
図1において、走査投光された光束のうち対象物に当たって反射したレーザ光の一部は、再び透明板TRを透過して筐体CS内のミラーユニットMUの第2ミラー面M2に入射し、ここで反射され、更に第1ミラー面M1で反射されて、レンズLSにより集光され、それぞれフォトダイオードPDの受光面で画素毎に検知されることとなる。更に、処理部である処理回路PROCが、半導体レーザLDの出射タイミングとフォトダイオードPDの受光タイミングとの時間差に応じて距離情報を求める。これにより監視空間内の全領域で対象物の検出を行って、画素毎に距離情報を持つ距離画像としてのフレームFL(図2参照)を得ることができる。かかる距離画像は、不図示のネットワークなどを介して遠方のモニタに送信されて表示されたり、また記憶装置に記憶できる。
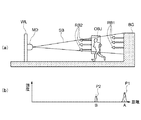
次に、背景差分法を用いた、監視装置MDの監視対象物の検知アルゴリズムについて説明する。図3(a)、4(a)、5は、監視空間を側方から見た状態を示す模式図であり、図3(b)、4(b)は、図3(a)、4(a)にそれぞれ対応し、ある画素の出力を処理した処理回路PROCの信号を示すグラフであり、縦軸に強度、横軸に距離をとって示している。
本実施の形態で採用する背景差分法では、予め取得した基準画像(背景画像ともいう)を用いる。具体的には、監視の前準備(前処理)として、図3(a)に示すように、人間や動物等の移動物体が存在しない背景対象物BG(基準背景という)に対して、監視装置MDからレーザスポット光束SBを走査する。図3(a)に示す状態では、監視装置MDから出射され同一の投受光方向に向かうレーザスポット光束SBは、背景対象物BGに照射され反射光RB1となって、監視装置MDに戻る。
この場合、処理回路PROCからの処理結果は、図3(b)に示すように、背景対象物BGまでの距離に対応したピークP1(ラストエコー:最高次の反射光)が得られる。よって背景対象物BGから得られた反射光RB1に基づいて、基準画像(図2参照)を得ることができる。対象物監視アルゴリズム上、最高次の反射光であるピークP1の奥には対象物は存在しないものとする。一般的な背景差分法を用いた対象物監視アルゴリズムでは、最高次の反射光(ラストエコー)を発する対象物の奥には,対象物が存在しないものとしている。「最高次の反射光」とは、監視装置MDの最大限測定可能な距離(これを超えると測定不能点となる)以内であって、最も遠方の対象物からの反射光をいうものとする。最高次の反射光を用いて背景対象物を認識して背景画像を設定し、また実際の監視時に最高次の反射光を用いて検知対象物を認識することで、雨や雪、霧などの影響を回避できる。
実際の監視時においては、図4(a)に示すように、背景対象物BGの手前に侵入者OBJが現れた場合、侵入者OBJからの反射光RB2に基づき、図4(b)に示す処理結果にピークP2が出現することとなる。かかる場合、処理回路PROCは、図3(b)の基準背景までの距離Aと、図4(b)の対象物までの距離Bとを比較して、その差(A−B)がある閾値Cを超えた場合、監視対象物(侵入者OBJ)が出現したとして注意を喚起することができる。又、侵入者OBJが移動している場合、走査を繰り返して得られるフレームでピークP2の位置が変わることから、処理回路PROCは侵入者OBJを追跡して、移動方向や速度を求める(動体検出を行う)ことができる。
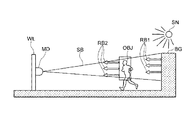
次に、監視空間の背景光の影響について説明する。ここで背景光とは、照射したレーザ光とは無関係に、監視空間から監視装置MDに入射する光をいう。本実施の形態における監視装置MDは、その構成上、レーザ光の出射方向からの光(すなわち反射光)のみを受光することができるから、比較的外乱に強いとされる。しかしながら、例えば図5に示すように、監視空間内に太陽SNが位置するような場合、太陽光の影響により背景光のレベルが大幅に増大するため、対象物検知に悪影響が及ぶ恐れがある。一般的に、レーザ光束が照射された対象物から反射する反射光の強度は微弱であるため、背景光強度が大きくなると、背景光に反射光が埋没してしまい、測距値の信頼性が低下する恐れがある。本発明者の検討結果によれば、例えば背景光強度が比較的低い屋内の場合、測距値±12cmで対象物を検出することができた(測定再現性という)のに対し、野外で背景光が入りやすい環境であると、測距値±24cm程度まで測定再現性が低下することが判明した。
そこで本実施の形態においては、検出装置としてのフォトダイオードPDの画素を用いて背景光を検出し、その出力信号に応じて処理回路PROCが閾値Cを変更するのである。この例では、監視空間内に太陽SNが位置すると,フォトダイオードPDが検出する背景光の強度が高まるので、フォトダイオードPDの出力を処理回路PROCが検出し、それに応じて閾値Cを高めるのである。すなわち、背景光の強度が高い場合には、閾値Cを増大させることで、誤検出の恐れを低減させている。これにより太陽光などの影響をできるだけ回避して、検出処理を継続することができる。
ここで用いる閾値Cとして、上述の例に当てはめると、屋内で対象物検知を行う際は12cmに設定し、屋内で対象物検知を行う際は24cmに設定することが好ましい。但し、閾値は背景光の強度に比例して(例えば背景光の強度が30%増大した場合、閾値を30%増大させるなど)、監視空間の環境に合わせて適宜増減させることができる。監視空間内に太陽SNが位置する場合と、それ以外の場合とで2値のいずれかを選択しても良い。閾値Cは、シミュレーションや実験等を通じて最適な値を決定できる。又、検出装置が検出する背景光の強度は、画素が受光した光の最大強度或いは平均強度でも良いし、積算値でも良い。検出装置として、フォトダイオードPDに限らず日射センサ等を別途用いても良い。
一方、処理回路PROCは、ある画素において背景光の強度が非常に高い場合、直射日光等を検出したと判定できる。そこで処理回路PROCは限界値を設定し、かかる限界値を背景光の強度が超えた場合、異常光を検出したものとして当該画素を対象物から除外することもできる。
図6は、監視装置MDの処理回路PROCで行われる監視制御を示すフローチャートである。まず図6のステップS101において、処理回路PROCは、フォトダイオードPDの全画素から出力信号を受信し、個々に背景光強度を取得する。
次いで、ステップS102で、処理回路PROCは、不図示のインタフェースを用いてユーザーが基準となる背景画像を更新するか否かを判断する。背景画像を更新したと判断した場合、処理回路PROCは、ステップS103で新たな背景画像を登録して、これを用いて監視対象物を検知する。一方、処理回路PROCが背景画像を更新したと判断しなかった場合、フローはステップS103を迂回する。
更にステップS104でN=1とおき、続くステップS105で処理回路PROCは,求めた背景光強度が限界値を超えているか否かを判断する。求めた背景光強度が限界値を超えていると判断した場合、処理回路PROCはステップS106で,N番目の画素について検出処理対象データから除外する。この場合、処理回路PROCは、当該画素を距離画像上、例えば測定不能点として認定できる。
一方、求めた背景光強度が限界値以下であると判断した場合、処理回路PROCはステップS107で,N番目の画素について検出処理対象データに採用する。
続くステップS108で処理回路PROCは、N番目の画素の背景光強度に応じて、上述したように閾値Cnを決定する。その後、処理回路PROCは,ステップS109で、N番目の画素について差分、すなわち(背景画像の距離An−カレントフレームの対象物の距離Bn)を求める。
処理回路PROCは、ステップS110で、N番目の画素について差分(An−Bn)と閾値Cnとを比較し,差分(An−Bn)が閾値Cnを超えていたときは、ステップS111でN番目の画素を抽出(記憶)する。一方、差分(An−Bn)が閾値Cnを超えていなければ、ステップS111を迂回してN番目の画素を記憶しない。
更にステップS112で、処理回路PROCは、フレーム内の全ての画素について差分と閾値を比較し終わったか否かを判断し、比較し終わっていないと判断した場合、ステップS113でN=N+1として、フローをステップS105へと戻す。これに対し、フレーム内の全ての画素について差分と閾値を比較し終わったと判断した場合、処理回路PROCは、ステップS114で、抽出した画素に対してクラスタリング処理を行う。クラスタリング処理とは、抽出した画素のうち一塊になっている画素群を見出す処理であり、すなわち抽出した画素が監視すべき対象物に該当するか否かを切り分けるために必要な処理である。ここで一塊になった画素群の数をクラスタ画素数といい、これが所定値Dを超えている場合、一定の大きさを持つ監視対象物と判定できる。よって所定値Dは、検出したい対象物の大きさによって最適な値を設定するものとする。例えば、検出した対象物が人間であれば、人間の大きさに基づいた所定値Dを設定する。これにより、検出対象外である小動物等による誤報を回避できる。
処理回路PROCは、ステップS115で、求めたクラスタ画素数が所定値Dを超えているか否かを判断する。所定値Dを超えている場合には、ステップS116で処理回路PROCはアラーム信号を出力し、不図示のモニタにおいて警報表示を行い、フローをステップS101へと戻して,次のレーザ光走査を行って次のフレームについて距離画像を得る。一方、求めたクラスタ画素数が所定値Dを超えていなければ、処理回路PROCは背景画像のまま変化なしと判断し、アラーム信号を出力することなく、フローをステップS101へと戻す。
本発明は、明細書に記載の実施例に限定されるものではなく、他の実施例・変形例を含むことは、本明細書に記載された実施例や思想から本分野の当業者にとって明らかである。明細書の記載及び実施例は、あくまでも例証を目的としており、本発明の範囲は後述するクレームによって示されている。例えば、背景光として、監視空間に太陽が位置する際に対象物から入射する光の例を挙げたが、これに限られず高輝度の人工光源等が監視空間に存在するような場合も、同様に扱える。
BG 背景対象物
CL コリメートレンズ
CS 筐体
CSa 上壁
CSb 下壁
CSc 側壁
CSd 開口
FL フレーム
LD 半導体レーザ
LPS 出射部
LS レンズ
M1、M2 ミラー面
MD 監視装置
MT モータ
MTa 軸
MU ミラーユニット
OBJ 侵入者
PD フォトダイオード
PROC 処理回路
RB1、RB2 反射光
RO 回転軸
RPS 受光部
SB レーザスポット光
TR 透明板
WL 壁
CL コリメートレンズ
CS 筐体
CSa 上壁
CSb 下壁
CSc 側壁
CSd 開口
FL フレーム
LD 半導体レーザ
LPS 出射部
LS レンズ
M1、M2 ミラー面
MD 監視装置
MT モータ
MTa 軸
MU ミラーユニット
OBJ 侵入者
PD フォトダイオード
PROC 処理回路
RB1、RB2 反射光
RO 回転軸
RPS 受光部
SB レーザスポット光
TR 透明板
WL 壁
Claims (4)
- 光束を出射する出射部と、前記光束を監視空間内で走査する走査部と、前記監視空間内の対象物から反射した光束を受光する受光部とを備えた投受光ユニットと、
前記投受光ユニットからの信号を処理することで、前記対象物までの距離を測定する処理部と、
前記監視空間における背景光の強度を検出する検出装置と、を有する監視システムであって、
前記処理部は、前記検出装置が検出した前記背景光の強度に基づいて閾値Cを設定し、前記投受光ユニットから同一投受光方向における基準背景までの距離Aと、前記対象物までの距離Bとの差分(A−B)が前記閾値Cを超えている場合、監視対象物と認定する監視システム。 - 前記処理部は、前記背景光の強度が増大するにつれて前記閾値を高くする請求項1に記載の監視システム。
- 前記処理部は、前記検出装置が検出した前記背景光の強度が限界値を超えているときは、異常光を検出したものと判断して、前記監視対象物から除外する請求項1又は2に記載の監視システム。
- 前記検出装置は、前記受光部である請求項1〜3のいずれかに記載の監視システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016107161A JP2017215642A (ja) | 2016-05-30 | 2016-05-30 | 監視システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016107161A JP2017215642A (ja) | 2016-05-30 | 2016-05-30 | 監視システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017215642A true JP2017215642A (ja) | 2017-12-07 |
Family
ID=60576973
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016107161A Pending JP2017215642A (ja) | 2016-05-30 | 2016-05-30 | 監視システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017215642A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019158604A (ja) * | 2018-03-13 | 2019-09-19 | オムロン株式会社 | 光検出装置、光検出方法及びライダー装置 |
| JP2020076663A (ja) * | 2018-11-08 | 2020-05-21 | 株式会社Ihiエアロスペース | 無人移動体及び無人移動体の制御方法 |
| CN116798196A (zh) * | 2023-08-28 | 2023-09-22 | 湖南天联城市数控有限公司 | 燃气安全报警方法、设备及可读存储介质 |
-
2016
- 2016-05-30 JP JP2016107161A patent/JP2017215642A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019158604A (ja) * | 2018-03-13 | 2019-09-19 | オムロン株式会社 | 光検出装置、光検出方法及びライダー装置 |
| JP2020076663A (ja) * | 2018-11-08 | 2020-05-21 | 株式会社Ihiエアロスペース | 無人移動体及び無人移動体の制御方法 |
| JP7195883B2 (ja) | 2018-11-08 | 2022-12-26 | 株式会社Ihiエアロスペース | 無人移動体及び無人移動体の制御方法 |
| CN116798196A (zh) * | 2023-08-28 | 2023-09-22 | 湖南天联城市数控有限公司 | 燃气安全报警方法、设备及可读存储介质 |
| CN116798196B (zh) * | 2023-08-28 | 2023-10-27 | 湖南天联城市数控有限公司 | 燃气安全报警方法、设备及可读存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10371817B2 (en) | Object detecting apparatus | |
| US11592537B2 (en) | Optical crosstalk mitigation in LIDAR using digital signal processing | |
| US9891432B2 (en) | Object detection device and sensing apparatus | |
| CN102253392B (zh) | 飞行时间摄像机单元和光学监视系统 | |
| US8420998B2 (en) | Target detecting and determining method for detecting and determining target based on height information and storage medium for storing program executing target detecting and determining method | |
| US11808887B2 (en) | Methods and systems for mapping retroreflectors | |
| JP2020504305A (ja) | 高周波パルス発射を用いる高分解能ライダ | |
| JP2019144065A (ja) | 光測距装置 | |
| WO2020105527A1 (ja) | 画像解析装置、画像解析システム、および制御プログラム | |
| JP6465772B2 (ja) | レーザレーダ装置 | |
| JP2017215642A (ja) | 監視システム | |
| RU2375724C1 (ru) | Способ лазерной локации заданной области пространства и устройство для его осуществления | |
| CN111257849A (zh) | 旋转角锥形反射镜 | |
| US20210255289A1 (en) | Light detection method, light detection device, and mobile platform | |
| US20130341486A1 (en) | Apparatus for obtaining 3d information using photodetector array | |
| CN110446944A (zh) | 基于spad的激光雷达系统 | |
| JP6988797B2 (ja) | 監視システム | |
| US11935380B2 (en) | Operating a scanning smoke detector | |
| JP2019105550A (ja) | 物体検出装置、物体検出装置の制御方法、および物体検出装置の制御プログラム | |
| JP2008281427A (ja) | 距離測定装置 | |
| JP6835079B2 (ja) | 監視システム | |
| KR20240005752A (ko) | 픽셀 맵핑 솔리드-스테이트 lidar 송신기 시스템 및 방법 | |
| US20230028749A1 (en) | Lidar with multi-range channels | |
| US11561289B2 (en) | Scanning LiDAR system with a wedge prism | |
| CN111595444B (zh) | 一种运动目标光谱跟踪测量遥感系统以及方法 |