JP2015090313A - トルク測定装置付回転伝達装置 - Google Patents
トルク測定装置付回転伝達装置 Download PDFInfo
- Publication number
- JP2015090313A JP2015090313A JP2013229952A JP2013229952A JP2015090313A JP 2015090313 A JP2015090313 A JP 2015090313A JP 2013229952 A JP2013229952 A JP 2013229952A JP 2013229952 A JP2013229952 A JP 2013229952A JP 2015090313 A JP2015090313 A JP 2015090313A
- Authority
- JP
- Japan
- Prior art keywords
- detected
- shaft
- sensor unit
- portions
- torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





















































Landscapes
- Control Of Transmission Device (AREA)
Abstract
【課題】1対のエンコーダと1対のセンサとにより、回転軸の捩り量を測定する事に基づいて、この回転軸のトルクを測定する構造で、測定の分解能を十分に高める事ができ、しかも前記両センサを1箇所に支持できる構造を実現する。【解決手段】対象となる回転軸を、入力歯車7を固定した中空状の入力軸13と、出力歯車8を固定した中空状の出力軸14とを、これら両軸13、14の内径側に配置したトーションバー15により連結して成る、回転軸ユニット6とする。又、前記入力軸13と共に回転する部分に支持固定した第一エンコーダ10と、前記出力軸14と共に回転する部分に支持固定した第二エンコーダ11とを、互いに近接配置する。そして、1個のセンサユニット12内に保持した1対のセンサ42a、42bの検出部を、前記両エンコーダ10、11の被検出部に対向させた状態で、前記センサユニット12をハウジングに支持する。【選択図】図6
Description
本発明は、例えば、自動車用自動変速機に組み込んで、回転軸によりトルクを伝達すると共に、この回転軸が伝達するトルクを測定する為に利用する、トルク測定装置付回転伝達装置の改良に関する。
自動車用自動変速機の変速制御を適切に行う為に従来から、この自動車用自動変速機を構成する回転軸の回転速度と、この回転軸により伝達しているトルクとを測定し、その測定結果を前記変速制御を行う為の情報として利用する事が行われている。一方、前記トルクを測定する為に利用可能な装置として従来から、トルクを伝達している回転軸の弾性的な捩れ変形量を1対のセンサの出力信号の位相差に変換し、この位相差に基づいて前記トルクを測定する装置が知られている(例えば、特許文献1参照)。この様な従来構造に就いて、図53を参照しつつ、以下に簡単に説明する。
この図53に示した従来構造の第1例の場合、対象となる回転軸1の軸方向2箇所位置に、1対のエンコーダ2、2を外嵌固定している。被検出部である、これら両エンコーダ2、2の外周面の磁気特性は、円周方向に関して交互に且つ等ピッチで変化している。又、これら両外周面の磁気特性が円周方向に関して変化するピッチは、これら両外周面同士で互いに等しくなっている。又、これら両外周面に、1対のセンサ3、3の検出部を対向させた状態で、これら両センサ3、3を、図示しないハウジングに支持している。これら両センサ3、3は、それぞれ自身の検出部を対向させた部分の磁気特性の変化に対応して、その出力信号を変化させるものである。
上述の様な前記両センサ3、3の出力信号は、前記回転軸1と共に前記両エンコーダ2、2が回転する事に伴い、それぞれ周期的に変化する。この変化の周波数(及び周期)は、前記回転軸1の回転速度に見合った値をとる。この為、この周波数(又は周期)に基づいて、前記回転速度を求められる。又、前記回転軸1によりトルクを伝達する事に伴って、この回転軸1が弾性的に捩れ変形すると、前記両エンコーダ2、2が回転方向に相対変位する。この結果、前記両センサ3、3の出力信号同士の間の位相差比(=位相差/1周期)が変化する。又、この位相差比は、前記トルク(前記回転軸1の弾性的な捩れ変形量)に見合った値をとる。この為、この位相差比に基づいて、前記トルクを求められる。
ところが、上述した様な従来構造の第1例を、自動車用自動変速機に組み込んで使用する場合には、測定対象となる回転軸1の捩り剛性が高い為、この回転軸1の弾性的な捩り変形量を十分に確保する事が難しく、トルク測定の分解能が低くなると言う問題がある。又、軸方向に離隔して設置した2個のセンサ3、3を使用する為、これら両センサ3、3から引き出された2本のハーネス4、4の配設が困難になると言う問題がある。又、ハウジングには、前記両センサ3、3毎の支持固定部を、高精度な相対位置関係で設ける必要がある為、前記ハウジングの加工が困難になると言う問題がある。
一方、前記特許文献1には、図54に示す様に、回転軸1の軸方向2箇所位置に固定した1対のエンコーダ2a、2aの被検出部を、軸方向中央部に向け延出させると共に、この軸方向中央部に配置した1個のセンサユニット5を構成する1対のセンサの検出部を、前記両エンコーダ2a、2aの被検出部に対向させる構造が記載されている。但し、この従来構造の第2例の場合も、自動車用自動変速機に組み込んで使用する場合には、対象となる回転軸1の捩り剛性が高い為、この回転軸1の弾性的な捩り変形量を十分に確保する事が難しい。従って、上述した従来構造の第2例によっても、トルク測定の分解能が低くなると言った問題を解消できない。
又、特許文献2には、それぞれの外周面にエンコーダを固定した1対の回転軸を、同一直線上に配置すると共に、これら両回転軸の端部を、これら両回転軸よりも弾性的に捩り変形し易いトーションバーの両端部に連結した構造が記載されている。この特許文献2に記載された従来構造の第3例の場合には、トルクの伝達時に生じる前記トーションバーの弾性的な捩れ変形に基づいて、前記両エンコーダの回転方向の相対変位量を多くできる。この為、その分だけ、トルク測定の分解能を向上させる事ができる。但し、この様な従来構造の第3例を、自動車用自動変速機のカウンタ軸に適用する場合には、トルク測定の分解能を十分に向上させる事が難しい。即ち、このカウンタ軸の軸方向2箇所位置には、入力歯車と出力歯車とが固定されており、このカウンタ軸のうちで、トルクの伝達時に弾性的に捩れ変形する部分は、前記両歯車同士の間部分のみとなる。この為、この様なカウンタ軸に、上述の様な従来構造の第3例を適用する場合には、前記トーションバーを、前記両歯車同士の間に設置する必要がある。従って、このトーションバーの軸方向寸法は、前記両歯車同士の軸方向間隔以下となる。ところが、前記カウンタ軸の場合には、これら両歯車同士の軸方向間隔が狭い為、前記トーションバーの軸方向寸法を十分に長くできない。従って、トルクの伝達時に生じる、前記トーションバーの弾性的な捩れ変形量を十分に確保できない。この結果、トルク測定の分解能を十分に向上させる事が難しい。
本発明は、上述の様な事情に鑑み、1対のエンコーダと1個のセンサユニットとを使用して、伝達トルクを測定できると共に、1対の歯車同士の軸方向間隔の広狭に拘わらず、トルク測定の分解能を高くできる構造を実現すべく発明したものである。
本発明のトルク測定装置付回転伝達装置は何れも、ハウジングと、回転軸ユニットと、第一歯車と、第二歯車と、第一エンコーダと、第二エンコーダと、1個のセンサユニットとを備える。
このうちの回転軸ユニットは、それぞれが中空状の第一、第二両回転軸と、トーションバーとを備える。このうちの第一、第二両回転軸は、互いに同心に配置されると共に、互いの一端部同士を相対回転可能に組み合わされた状態で、前記ハウジングに回転自在に支持されている。又、前記トーションバーは、前記第一、第二両回転軸の内径側に、これら第一、第二両回転軸と同心に配置されると共に、一端部をこのうちの第一回転軸に、他端部をこのうちの第二回転軸に、それぞれ相対回転不能に連結されている。
又、前記第一歯車は、前記第一回転軸の外周面の軸方向中間部に固定されている。
又、前記第二歯車は、前記第二回転軸の外周面の軸方向中間部に固定されている。
尚、これら第一、第二各歯車は、前記第一、第二各回転軸と別体に造ったものを、これら各回転軸の外周面の軸方向中間部に結合固定しても良いし、或いは、これら各回転軸の外周面の軸方向中間部に、一体形成しても良い。
又、前記第一エンコーダは、前記第一、第二両回転軸のうちの何れか一方の回転軸と共に回転する部分に固定された状態で、この一方の回転軸と同心で円環状の第一被検出部を有すると共に、この第一被検出部の磁気特性を円周方向に関して交互に且つ等ピッチで変化させている。
又、前記第二エンコーダは、前記両回転軸のうちの他方の回転軸と共に回転する部分に固定された状態で、この他方の回転軸と同心で円環状の第二被検出部を有すると共に、この第二被検出部の磁気特性を円周方向に関して交互に且つ等ピッチで変化させている。
尚、これら第一、第二各エンコーダも、前記各回転軸と共に回転する部分と別体に造ったものを、これら各部分に支持固定しても良いし、或いは、これら各部分に、一体形成しても良い。
又、前記第一、第二両被検出部は、互いに近接配置(例えば10mm以内、より好ましくは5mm以内の間隔をあけて配置)されている。
又、前記センサユニットは、その一部を前記第一、第二両被検出部に対向させた状態で、前記ハウジングに支持されており、且つ、前記第一、第二両被検出部のうちで自身が対向している部分の磁気特性変化に対応して出力信号を変化させる。
このうちの回転軸ユニットは、それぞれが中空状の第一、第二両回転軸と、トーションバーとを備える。このうちの第一、第二両回転軸は、互いに同心に配置されると共に、互いの一端部同士を相対回転可能に組み合わされた状態で、前記ハウジングに回転自在に支持されている。又、前記トーションバーは、前記第一、第二両回転軸の内径側に、これら第一、第二両回転軸と同心に配置されると共に、一端部をこのうちの第一回転軸に、他端部をこのうちの第二回転軸に、それぞれ相対回転不能に連結されている。
又、前記第一歯車は、前記第一回転軸の外周面の軸方向中間部に固定されている。
又、前記第二歯車は、前記第二回転軸の外周面の軸方向中間部に固定されている。
尚、これら第一、第二各歯車は、前記第一、第二各回転軸と別体に造ったものを、これら各回転軸の外周面の軸方向中間部に結合固定しても良いし、或いは、これら各回転軸の外周面の軸方向中間部に、一体形成しても良い。
又、前記第一エンコーダは、前記第一、第二両回転軸のうちの何れか一方の回転軸と共に回転する部分に固定された状態で、この一方の回転軸と同心で円環状の第一被検出部を有すると共に、この第一被検出部の磁気特性を円周方向に関して交互に且つ等ピッチで変化させている。
又、前記第二エンコーダは、前記両回転軸のうちの他方の回転軸と共に回転する部分に固定された状態で、この他方の回転軸と同心で円環状の第二被検出部を有すると共に、この第二被検出部の磁気特性を円周方向に関して交互に且つ等ピッチで変化させている。
尚、これら第一、第二各エンコーダも、前記各回転軸と共に回転する部分と別体に造ったものを、これら各部分に支持固定しても良いし、或いは、これら各部分に、一体形成しても良い。
又、前記第一、第二両被検出部は、互いに近接配置(例えば10mm以内、より好ましくは5mm以内の間隔をあけて配置)されている。
又、前記センサユニットは、その一部を前記第一、第二両被検出部に対向させた状態で、前記ハウジングに支持されており、且つ、前記第一、第二両被検出部のうちで自身が対向している部分の磁気特性変化に対応して出力信号を変化させる。
特に、請求項1に記載したトルク測定装置付回転伝達装置の場合には、前記トーションバーが中空状である。又、上述した各部材とは別個に、連結軸を備えている。この連結軸は、前記トーションバーの内径側に、このトーションバーと同心に配置されると共に、一端部を前記第一、第二両回転軸のうちの何れか一方の回転軸に相対回転不能に連結された状態で、他端部を他方の回転軸及び前記トーションバーの端部から軸方向に突出させている。又、前記第一エンコーダは、前記連結軸の他端部に固定されており、第一被検出部は、この連結軸と同心である。又、前記第二エンコーダは、前記他方の回転軸の他端部に固定されており、前記第二被検出部は、この他方の回転軸と同心である。
これに対し、請求項2に記載したトルク測定装置付回転伝達装置の場合、前記第一エンコーダは、軸方向に関して前記第一、第二両歯車同士の間に挟まれた位置に配置されると共に、前記第一回転軸に対して固定されており、前記第一被検出部は、この第一回転軸と同心である。又、前記第二エンコーダは、軸方向に関して前記第一、第二両歯車同士の間に挟まれた位置に配置されると共に、前記第二回転軸に対して支持固定されており、前記第二被検出部は、この第二回転軸と同心である。
上述した様な本発明のトルク測定装置付回転伝達装置を実施する場合に、好ましくは、請求項3に記載した発明の様に、前記トーションバーの軸方向中間部で、トルクを伝達する際に弾性的に捩れ変形する部分(前記トーションバーのうち、前記第一、第二両回転軸に対し相対回転不能に連結した両端部同士の間に挟まれた部分)の軸方向寸法を、前記両歯車同士の軸方向間隔よりも大きくする。
又、本発明を実施する場合には、例えば、次の構成C1を採用する事ができる。この構成C1を採用する場合には、前記第一、第二両回転軸の一端部同士を、軸方向に関して互いに近づき合う方向の変位を阻止した状態で組み合わせる。又、前記第一、第二両歯車を、それぞれはすば歯車とする。更に、これら両歯車の歯の傾斜方向を、これら両歯車の正回転時(使用時に実現する頻度の高い回転方向への回転時で、例えば、車両が前進している状態での回転時)に、これら両歯車に作用するアキシアル方向のギヤ反力が互いに向き合う(押し付け合う)方向となる様に規制する。
又、本発明を実施する場合には、例えば、次の構成C2を採用する事ができる。この構成C2を採用する場合には、前記第一回転軸の一端部に設けた第一組み合わせ用筒部と、前記第二回転軸の一端部に設けた第二組み合わせ用筒部とのうちの何れか一方の組み合わせ用筒部を、他方の組み合わせ用筒部の内径側に挿入する。又、これら両組み合わせ用筒部の互いに対向する周面同士の間に、ラジアル軸受(ラジアル転がり軸受、又は、ラジアル滑り軸受)を設置すると共に、前記一方の組み合わせ用筒部の外周面の基端部に設けた段差面と、前記他方の組み合わせ用筒部の先端面との間に、スラスト軸受(スラスト転がり軸受、又は、スラスト滑り軸受)を設置する。
又、この場合に、このスラスト滑り軸受として、例えば、前記段差面と前記先端面との間に挟持した円輪状のスラストワッシャを使用する事ができる。この場合には、例えば、次の構成C3を採用する事ができる。この構成C3を採用する場合には、前記スラストワッシャの円周方向1乃至複数箇所(好ましくは、等間隔の複数箇所)に、前記段差面と前記先端面との間部分を径方向両側から挟む位置に存在する1対の空間同士を連通する除肉部を形成する。この除肉部としては、例えば、前記スラストワッシャの両側面を連通する状態で設けたスリットや透孔の他、このスラストワッシャの少なくとも一方の側面に設けた凹溝等を採用できる。
又、前記スラスト滑り軸受として、上述の様なスラストワッシャを使用する場合には、例えば、次の構成C4を採用する事ができる。この構成C4を採用する場合には、前記スラストワッシャの外周縁を、前記段差面と前記先端面との間部分から径方向外方に突出させる。これと共に、この外周縁に、全周に亙り補強用円筒部を設ける。
又、この場合に、このスラスト滑り軸受として、例えば、前記段差面と前記先端面との間に挟持した円輪状のスラストワッシャを使用する事ができる。この場合には、例えば、次の構成C3を採用する事ができる。この構成C3を採用する場合には、前記スラストワッシャの円周方向1乃至複数箇所(好ましくは、等間隔の複数箇所)に、前記段差面と前記先端面との間部分を径方向両側から挟む位置に存在する1対の空間同士を連通する除肉部を形成する。この除肉部としては、例えば、前記スラストワッシャの両側面を連通する状態で設けたスリットや透孔の他、このスラストワッシャの少なくとも一方の側面に設けた凹溝等を採用できる。
又、前記スラスト滑り軸受として、上述の様なスラストワッシャを使用する場合には、例えば、次の構成C4を採用する事ができる。この構成C4を採用する場合には、前記スラストワッシャの外周縁を、前記段差面と前記先端面との間部分から径方向外方に突出させる。これと共に、この外周縁に、全周に亙り補強用円筒部を設ける。
又、本発明を実施する場合には、例えば、次の構成C5を採用する事ができる。この構成C5を採用する場合には、前記トーションバーの一端部外周面に、その表層部に第一メッキ層を有する第一雄スプライン部を、前記第一回転軸の内周面に、この第一雄スプライン部と係合可能な第一雌スプライン部を、それぞれ設ける。このうちの第一メッキ層を構成する金属は、前記トーションバーと前記第一回転軸とを構成する各金属よりも軟質の金属とする。そして、前記第一雄スプライン部を前記第一雌スプライン部に対し、前記第一メッキ層の自由状態(外力が作用していない状態)での厚さ寸法よりも小さい締め代で圧入する事により、周方向のがたつきなく係合させる。これと共に、前記トーションバーの他端部外周面に、その表層部に第二メッキ層を有する第二雄スプライン部を、前記第二回転軸の内周面に、この第二雄スプライン部と係合可能な第二雌スプライン部を、それぞれ設ける。このうちの第二メッキ層を構成する金属は、前記トーションバーと前記第二回転軸とを構成する各金属よりも軟質の金属とする。そして、前記第二雄スプライン部を前記第二雌スプライン部に対し、前記第二メッキ層の自由状態での厚さ寸法よりも小さい締め代で圧入する事により、周方向のがたつきなく係合させる。
又、この場合には、例えば、次の構成C6を採用する事ができる。この構成C6を採用する場合には、前記第一、第二両メッキ層を構成する金属を、銅又はニッケルとする。
又、この場合には、例えば、次の構成C6を採用する事ができる。この構成C6を採用する場合には、前記第一、第二両メッキ層を構成する金属を、銅又はニッケルとする。
又、本発明を実施する場合には、例えば、次の構成C7を採用する事ができる。この構成C7を採用する場合には、前記連結軸の一端部を、前記第一、第二両回転軸のうちの何れか一方の回転軸の内周面に締り嵌めにより内嵌固定する。
又、本発明を実施する場合には、例えば請求項4に記載した発明の様に、前記回転軸ユニットを前記ハウジングに対し、複数の転がり軸受により回転自在に支持する。この場合には、これら各転がり軸受のうちの少なくと1つの転がり軸受を構成する内輪を、前記第一回転軸又は前記第二回転軸と一体に造る事ができる。
又、本発明を実施する場合には、例えば請求項5に記載した発明の様に、前記センサユニットとして、前記第一被検出部に対向させた第一センサと、前記第二被検出部に対向させた第二センサとを備えたものを使用する。これら第一、第二両センサは、それぞれ前記第一、第二両被検出部のうちで自身が対向している部分の磁気特性変化に対応して変化する出力信号を発生させるものとする。
又、本発明を実施する場合には、例えば請求項6に記載した発明の構成を採用できる。この構成を採用する場合には、前記第一、第二両エンコーダを、それぞれ磁性材製とする。又、前記第一、第二両被検出部を、それぞれ除肉部と充実部とを円周方向に関して交互に且つ等ピッチで配置したものとする。そして、これら両被検出部を、互いに近接した状態で径方向又は軸方向に重畳配置する。尚、前記除肉部と充実部との組み合わせとしては、凹部と凸部との組み合わせや、切り欠きと舌片との組み合わせや、透孔と柱部との組み合わせ等を採用できる。又、前記センサユニットとして、磁性材製のステータと、1本の導線から成る複数のコイルとを備えると共に、この導線に駆動電圧を印加した状態での、この導線の出力電流又は出力電圧を出力信号として使用するものを用いる。このうちのステータは、それぞれが前記両被検出部の重畳方向に長く、それぞれの先端面をこれら両被検出部に対し、これら両被検出部の重畳方向片側から対向させた状態で、円周方向に関して等ピッチで配置された複数の芯部と、これら各芯部の基端部同士を連結する円環状のリム部とを備える。又、前記各コイルは、前記各芯部に1つずつ外嵌(巻回)されると共に、円周方向に隣り合うコイル同士で巻回方向が互いに逆になっている。
又、本発明を実施する場合には、例えば請求項7に記載した発明の構成を採用できる。この構成を採用する場合には、前記第一、第二両エンコーダを、それぞれ磁性材製とする。又、前記第一、第二両被検出部を、それぞれ除肉部と充実部とを円周方向に関して交互に且つ等ピッチで配置したものとする。そして、これら第一被検出部を構成する充実部と第二被検出部を構成する充実部とを、円周方向の隙間を介在させた状態で円周方向に関して交互に配置する。尚、前記除肉部と充実部との組み合わせとしては、凹部と凸部との組み合わせや、切り欠きと舌片との組み合わせや、透孔と柱部との組み合わせ等を採用できる。又、前記センサユニットとして、前記両被検出部の充実部を交互に配置した部分に対向させた1個のセンサを備えたものを使用する。このセンサは、前記両被検出部の充実部を交互に配置した部分のうちで自身が対向している部分の磁気特性変化に対応して変化する出力信号を発生させるものとする。
又、本発明を実施する場合には、例えば請求項8に記載した発明の構成を採用できる。この構成を採用する場合には、前記第一、第二両被検出部を、径方向に関して互いに対向した1対の円筒面、又は、軸方向に関して互いに対向した1対の円輪面であって、それぞれS極とN極とを円周方向に関して交互に且つ等ピッチで配置したものとする。又、前記センサユニットとして、前記両被検出部同士の間に配置された、磁気検出素子又はコイルを備えたものを使用する。そして、この磁気検出素子の出力電圧若しくは出力電流、又は、このコイルの出力電圧若しくは出力電流を、出力信号として使用する。
上述の様に構成する本発明のトルク測定装置付回転伝達装置の場合、センサユニットの出力信号は、回転軸ユニット(第一、第二両回転軸)と共に第一、第二両エンコーダ(第一、第二両被検出部)が回転する事に基づいて、この回転速度に対応した変化をする。この為、必要とすれば、前記センサユニットの出力信号に基づいて、前記回転速度を測定できる。又、前記回転軸ユニットにより、第一、第二両歯車同士の間でトルクを伝達する際には、トーションバーの軸方向中間部に弾性的な捩れ変形が生じる事に伴い、前記第一、第二両歯車同士(前記第一、第二両回転軸同士、前記第一、第二両エンコーダ同士)が、回転方向に相対変位する。そして、この様に第一、第二両エンコーダ同士が回転方向に相対変位する結果、前記センサユニットの出力信号が、この相対変位量(前記トルクの大きさ)に見合った変化をする。従って、このセンサユニットの出力信号に基づいて、前記トルクを測定できる。
特に、本発明の場合には、外周面の軸方向中間部に前記第一歯車を固定した前記第一回転軸と、外周面の軸方向中間部に前記第二歯車を固定した前記第二回転軸とを、それぞれ中空状に構成すると共に、その両端部をこれら両回転軸に対して相対回転不能に連結した前記トーションバーを、これら両回転軸の内径側に配置している。この為、このトーションバーの軸方向中間部の軸方向寸法を、例えば請求項3に記載した発明の様に、前記両歯車同士の軸方向間隔よりも大きくできる。従って、トルクの伝達時に生じる、前記トーションバーの軸方向中間部の弾性的な捩り変形量を十分に確保できる。この結果、本発明の場合には、前記回転軸ユニットを一体の回転軸とした構造とは異なり、前記両歯車同士の軸方向間隔の広狭に拘らず、前記トルクの伝達時に生じる、これら両歯車同士(前記両回転軸同士、前記両エンコーダ同士)の回転方向の相対変位量を十分に大きくできる。従って、トルク測定の分解能を十分に高める事ができる。
又、本発明の場合には、設計の段階で、前記トーションバーの軸方向中間部の径寸法や軸方向寸法を調節する事により、この軸方向中間部の捩り剛性を容易に調節できる。この為、前記回転軸ユニットを一体の回転軸とした構造に比べて、前記トルクと前記第一、第二両エンコーダ同士の回転方向の相対変位量との関係(ゲイン)を、計画的に設計し易くできる。
又、本発明の場合、使用するセンサユニットを1個にできる為、このセンサユニットから引き出されるハーネスの本数を1本とする事ができ、このハーネスの配設を容易に行える。又、ハウジング変形によるセンサ出力への影響を抑えられる。更に、ハウジングに設けるセンサユニットの支持固定部も1箇所で済む為、このハウジングの加工を容易にできる。
又、本発明を実施する場合に、前記構成C1を採用する場合には、第一、第二両歯車の正回転時に、これら両歯車に作用するアキシアル方向のギヤ反力を、少なくとも一部に於いて相殺できる。この為、前記両歯車の正回転時に、第一、第二両回転軸を支持する転がり軸受に負荷されるアキシアル荷重を抑えられ、その分だけ、これら各転がり軸受の摩擦損失を抑えられる。又、前記構成C1を採用する場合で、前記構成C2を採用する場合には、前記ラジアル軸受で曲げの力を受け、前記トーションバーでには捩れのトルクのみがかかるため、力を分散することが可能となり、前記トーションスプリングの発生応力を抑えられる。
又、前記構成C2を採用する場合で、前記構成C3を採用する場合には、ラジアル軸受を設置した空間である、1対の周面同士の間に挟まれた空間と、スラストワッシャを設置した空間である、段差面と先端面との間に挟まれた空間とに、それぞれ潤滑油を効率良く流通させられる。
即ち、前記ラジアル軸受を設置した空間と、前記スラストワッシャを設置した空間とは、互いに繋がっている為、これら両空間への潤滑油の供給は、何れの空間側からでも行える。但し、何れの空間側から潤滑油を供給する場合でも、前記スラストワッシャの両側面が、それぞれ前記段差面と前記先端面との全周に亙り接触していると、前記潤滑油が、前記スラストワッシャを設置した空間を通過しにくくなる。この結果、前記両空間に潤滑油を効率良く流通させられなくなる。
これに対して、前記構成C3を採用した発明の場合には、前記スラストワッシャを設置した空間を径方向両側から挟む位置に存在する1対の空間同士が、このスラストワッシャの円周方向1乃至複数箇所に形成した除肉部を介して連通している。この為、前記潤滑油は、この除肉部を通じて、前記スラストワッシャを設置した空間を容易に通過可能となる。この結果、前記ラジアル軸受を設置した空間と、前記スラストワッシャを設置した空間とのうちの、何れの空間側から潤滑油を供給する場合でも、これら両空間に潤滑油を効率良く流通させられる。従って、これら両空間に設置した前記ラジアル軸受及びスラストワッシャの潤滑状態を良好にできる。
又、前記構成C3を採用する場合に、前記構成C4を採用すれば、前記スラストワッシャの外周部の強度を高める事ができる。
即ち、前記ラジアル軸受を設置した空間と、前記スラストワッシャを設置した空間とは、互いに繋がっている為、これら両空間への潤滑油の供給は、何れの空間側からでも行える。但し、何れの空間側から潤滑油を供給する場合でも、前記スラストワッシャの両側面が、それぞれ前記段差面と前記先端面との全周に亙り接触していると、前記潤滑油が、前記スラストワッシャを設置した空間を通過しにくくなる。この結果、前記両空間に潤滑油を効率良く流通させられなくなる。
これに対して、前記構成C3を採用した発明の場合には、前記スラストワッシャを設置した空間を径方向両側から挟む位置に存在する1対の空間同士が、このスラストワッシャの円周方向1乃至複数箇所に形成した除肉部を介して連通している。この為、前記潤滑油は、この除肉部を通じて、前記スラストワッシャを設置した空間を容易に通過可能となる。この結果、前記ラジアル軸受を設置した空間と、前記スラストワッシャを設置した空間とのうちの、何れの空間側から潤滑油を供給する場合でも、これら両空間に潤滑油を効率良く流通させられる。従って、これら両空間に設置した前記ラジアル軸受及びスラストワッシャの潤滑状態を良好にできる。
又、前記構成C3を採用する場合に、前記構成C4を採用すれば、前記スラストワッシャの外周部の強度を高める事ができる。
又、前記構成C5を採用すれば、第一雄スプライン部と第一雌スプライン部との係合部、及び、第二雄スプライン部と第二雌スプライン部との係合部が、それぞれ周方向のがたつきを生じない係合部になる。この為、第一、第二両回転軸のうち、トルクが入力される側の回転軸の回転方向が反転する際に、前記両係合部で、がたつきの原因となる周方向隙間分の相対回転が生じる事を防止できる。この結果、この様な相対回転が生じる事に基づいて微小トルクの測定を正確に行えなくなると言った不都合が生じる事を防止できる。
又、前記構成C5を採用する場合、前記第一、第二両雄スプライン部を前記第一、第二両雌スプライン部に圧入する際に、締め代分の変形(弾性変形又は塑性変形)の大部分は、比較的軟質の第一、第二両メッキ層に生じる。この為、前記両係合部のがたつきの原因となる周方向隙間を、これら第一、第二両メッキ層により効率良く埋める(なくす)事ができる。これと共に、前記第一、第二両メッキ層を構成する金属の変形は、前記各インボリュートスプライン部の本体部分を構成する金属の変形に比べて小さい力で生じる為、圧入に要する力を軽減できる。
又、前記構成C5を採用する場合に、前記構成C6を採用すれば、前記第一、第二両メッキ層の硬度及び耐圧潰性の値を適切にできる。
又、前記構成C5を採用する場合、前記第一、第二両雄スプライン部を前記第一、第二両雌スプライン部に圧入する際に、締め代分の変形(弾性変形又は塑性変形)の大部分は、比較的軟質の第一、第二両メッキ層に生じる。この為、前記両係合部のがたつきの原因となる周方向隙間を、これら第一、第二両メッキ層により効率良く埋める(なくす)事ができる。これと共に、前記第一、第二両メッキ層を構成する金属の変形は、前記各インボリュートスプライン部の本体部分を構成する金属の変形に比べて小さい力で生じる為、圧入に要する力を軽減できる。
又、前記構成C5を採用する場合に、前記構成C6を採用すれば、前記第一、第二両メッキ層の硬度及び耐圧潰性の値を適切にできる。
又、前記構成C7を採用すれば、連結軸の一端部を第一、第二両回転軸のうちの何れか一方の回転軸に相対回転不能に連結する部分の構造を簡素化でき、その分、製造コストを抑えられる。
又、請求項4に記載した発明の構成を採用すれば、部品点数の削減に伴う、構造の簡素化、コスト低減等を図れる。
[実施の形態の第1例]
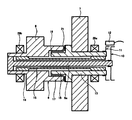
図1〜11は、請求項1、3、5に対応する、本発明の実施の形態の第1例を示している。本例のトルク測定装置付回転伝達装置は、前輪駆動車、又は、前輪駆動車と同様の原動機及び変速機配置を採用する四輪駆動車等、所謂横置きエンジン(トランスバースエンジン)を搭載した自動車用の自動変速機のカウンタ軸及びカウンタギヤ部分に組み込んで使用する。この様な本例のトルク測定装置付回転伝達装置は、図示しないハウジング(ミッションケース)と、カウンタ軸として機能する回転軸ユニット6と、それぞれがカウンタギヤとして機能する、第一歯車である入力歯車7及び第二歯車である出力歯車8と、連結軸9と、第一エンコーダ10と、第二エンコーダ11と、1個のセンサユニット12とを備える。
図1〜11は、請求項1、3、5に対応する、本発明の実施の形態の第1例を示している。本例のトルク測定装置付回転伝達装置は、前輪駆動車、又は、前輪駆動車と同様の原動機及び変速機配置を採用する四輪駆動車等、所謂横置きエンジン(トランスバースエンジン)を搭載した自動車用の自動変速機のカウンタ軸及びカウンタギヤ部分に組み込んで使用する。この様な本例のトルク測定装置付回転伝達装置は、図示しないハウジング(ミッションケース)と、カウンタ軸として機能する回転軸ユニット6と、それぞれがカウンタギヤとして機能する、第一歯車である入力歯車7及び第二歯車である出力歯車8と、連結軸9と、第一エンコーダ10と、第二エンコーダ11と、1個のセンサユニット12とを備える。
このうちの回転軸ユニット6は、中空状の第一回転軸である入力軸13と、中空状の第二回転軸である出力軸14と、中空状のトーションバー15とを備えており、連結軸9と3重管構造となっている。このうちの入力軸13及び出力軸14は、それぞれ鋼により円筒状に造られたもので、互いに同心に配置されると共に、互いの一端部同士を相対回転可能に組み合わされている。尚、これら入力軸13及び出力軸14のそれぞれに関して、一端部とは、互いに近い側の端部を言い、他端部とは、互いに遠い側の端部を言う。本例の場合には、前記入力軸13と前記出力軸14との一端部同士を相対回転可能に組み合わせる為に、この入力軸13の一端部に、第一組み合わせ用筒部である、比較的小径の入力側組み合わせ用筒部16を設けると共に、前記出力軸14の一端部に、第二組み合わせ用筒部である、比較的大径の出力側組み合わせ用筒部17を設けている。そして、この出力側組み合わせ用筒部17の内径側に、前記入力側組み合わせ用筒部16を挿入している。又、この状態で、これら両組み合わせ用筒部16、17の互いに対向する円筒状の周面同士の間に、ラジアルニードル軸受18を設置している。これと共に、前記入力側組み合わせ用筒部16の外周面の基端部に設けた段差面19と、前記出力側組み合わせ用筒部17の先端面20との間に、スラスト滑り軸受である、円輪状のスラストワッシャ21を挟持している。そして、この様な構成を採用する事により、前記入力軸13と前記出力軸14との一端部同士を、相対回転可能に、且つ、軸方向に関して互いに近づき合う方向の変位を阻止した状態で組み合わせている。
又、本例の場合、前記スラストワッシャ21は、図11の(A)に詳示する様に、円輪状の本体部分の円周方向等間隔の複数箇所に、それぞれが除肉部である、径方向に長いスリット22、22を、前記本体部分の内周縁に開口する状態で形成している。これと共に、この本体部分の外周縁に、この外周縁から軸方向に直角に折れ曲がった補強用円筒部23を、全周に亙り設けている。この様なスラストワッシャ21は、この補強用円筒部23の先端縁を前記入力軸13の他端側に向けた状態で、前記入力側組み合わせ用筒部16の基端部に、径方向に関する大きながたつきなく外嵌されている。これと共に、前記本体部分の径方向中間部を、前記段差面19と前記先端面20との間に挟持されている。又、この状態で、前記各スリット22、22が、前記段差面19と前記先端面20との間部分を径方向両側から挟む位置に存在する1対の空間同士を連通している。即ち、この様な連通状態を実現する為に、前記各スリット22、22の内接円の直径(前記本体部分の内径)を前記先端面20の内周縁の直径よりも小さくすると共に、前記各スリット22、22の外接円の直径を、前記先端面20の外周縁の直径よりも大きくしている。
又、前記トーションバー15は、炭素鋼の如き合金鋼により円管状に造られたもので、前記入力軸13及び出力軸14の内径側に、これら入力軸13及び出力軸14と同心に配置されている。又、この状態で、前記トーションバー15は、一端部(図5〜6の右端部)を前記入力軸13に、他端部(図5〜6の左端部)を前記出力軸14に、それぞれ相対回転不能に連結されている。この様な連結状態を実現する為に、本例の場合には、前記トーションバー15の外径寸法を、中間部に比べて両端部で少しだけ大きくすると共に、これら両端部の外周面を、それぞれ前記入力軸13の内周面の他端寄り部分と、前記出力軸14の内周面の他端寄り部分とに、相対回転不能に係合させている。具体的には、これら両係合部を、それぞれインボリュートスプライン係合部24a、24b(雄、雌両インボリュートスプライン部同士を周方向のがたつきなく係合させて成る係合部)としている。つまり、前記トーションバー15の一端部外周面に設けた第一雄スプライン部である第一雄インボリュートスプライン部62を、前記入力軸13の他半部内周面に設けた第一雌スプライン部である第一雌インボリュートスプライン部63に、周方向のがたつきなく係合させる事で、前記インボリュートスプライン係合部24aを構成している。これと共に、前記トーションバー15の他端部外周面に設けた第二雄スプライン部である第二雄インボリュートスプライン部64を、前記出力軸14の他端部内周面に設けた第二雌スプライン部である第二雌インボリュートスプライン部65に、周方向のがたつきなく係合させる事で、前記インボリュートスプライン係合部24bを構成している。尚、これら両係合部として、キー係合部等の、他の回転防止構造を持った係合部を採用する事もできる。又、この状態で、前記入力軸13及び出力軸14の内周面に係止した1対の止め輪25a、25bにより、前記トーションバー15を軸方向両側から挟持する事で、このトーションバー15の軸方向変位を阻止している。又、本例の場合、このトーションバー15の軸方向中間部で、トルクを伝達する際に弾性的に捩れ変形する部分(前記両インボリュートスプライン係合部24a、24b同士の間に挟まれた部分)の軸方向寸法Lを、次述する入力歯車7と出力歯車8との軸方向間隔Wよりも大きく(L>W)している(図示の例では、LをWの4倍強の大きさとしている)。
又、前記入力歯車7は、炭素鋼の如き合金鋼製のはすば歯車であり、前記入力軸13の中間部に外嵌固定されている。これら入力歯車7の内周面と入力軸13の外周面との嵌合部は、同心性を確保する為の円筒面嵌合部26a(外径側、内径側両円筒面同士を圧入嵌合させて成る嵌合部)と、相対回転を防止する為のインボリュートスプライン係合部24cとを、軸方向に隣接配置して成る。又、前記入力軸13に対する前記入力歯車7の軸方向の位置決めは、この入力軸13の外周面の中間部一端寄り部分に形成した段差面27に、前記入力歯車7の片側面(図1、2、5、6の左側面)の内周寄り部分を当接させる事により図っている。又、本例の場合、この入力歯車7の片側面の内周寄り部分にパーキングロック用歯車28を、一体に形成している。パーキングロック時には、このパーキングロック用歯車28の外周面の円周方向一部分に、図示しないロック部材の先端部を係合させる事で、前記回転軸ユニット6の回転を不能とする。又、前記出力歯車8は、炭素鋼の如き合金鋼製のはすば歯車であり、前記出力軸14の外周面の中間部一端寄り部分に、この出力軸14と一体に形成(固定)されている。本例の場合、前記回転軸ユニット6の正回転時(自動車が前進している状態での回転時)に、前記入力歯車7から前記入力軸13に入力されたトルクは、前記トーションバー15を介して前記出力軸14に伝達され、前記出力歯車8から出力される。この際に、前記トーションバー15の軸方向中間部は、前記トルクの大きさに見合った量だけ、弾性的に捩れ変形する。
又、前記回転軸ユニット6は、互いの接触角を逆向きに配置された1対の円すいころ軸受29a、29bにより、前記ハウジングに対して回転自在に支持されている。本例の場合には、これら両円すいころ軸受29a、29bを前記回転軸ユニット6に組み付ける為に、一方の円すいころ軸受29aを構成する内輪30aを、前記入力軸13の他端寄り部分に外嵌している。これと共に、この内輪30aの大径側端面と、前記入力歯車7の他側面との間で、間座31を挟持している。そして、この状態で、前記入力軸13の外周面の他端部に螺合し更に締め付けたナット32aにより、前記内輪30aの小径側端面を押圧する事で、前記入力軸13に対して前記内輪30a及び前記入力歯車7を結合固定している。又、前記他方の円すいころ軸受29bを構成する内輪30bを、前記出力軸14の他端寄り部分に外嵌すると共に、この内輪30bの大径側端面を、前記出力軸14の外周面の他端寄り部分に形成した段差面33に当接させている。そして、この状態で、前記出力軸14の外周面の他端部に螺合し更に締め付けたナット32bにより、前記内輪30bの小径側端面を押圧し、前記出力軸14に前記内輪30bを支持固定している。
又、本例の場合、それぞれがはすば歯車である、前記入力歯車7と前記出力歯車8との歯の傾斜方向を、これら両歯車7、8の正回転時(前記回転軸ユニット6の正回転時)に、これら両歯車7、8に作用するアキシアル方向のギヤ反力が互いに向き合う(互いに押し付け合う)方向となる様に規制している。これにより、前記両歯車7、8の正回転時に、これら両歯車7、8に作用するアキシアル方向のギヤ反力の少なくとも一部を相殺できる様にしている。これにより、前記両歯車7、8の正回転時に、前記両円すいころ軸受29a、29bに負荷されるアキシアル荷重を抑えて、その分だけ、これら両軸受29a、29bの摩擦損失(動トルク)を抑えられる様にしている。
又、前記連結軸9は、前記トーションバー15の内径側に、このトーションバー15と同心に配置されている。これと共に、前記連結軸9は、一端部(図6の右端部)を前記入力軸13に相対回転不能に連結された状態で、他端部(図6の左端部)を前記出力軸14の他端開口から突出させている。本例の場合には、この様に前記連結軸9の一端部を前記入力軸13に相対回転不能に連結する為に、この連結軸9の一端部を前記トーションバー15の一端開口から突出させると共に、この突出した部分の外周面に、外向フランジ状の鍔部34を形成している。そして、この鍔部34の外周面と、前記入力軸13の内周面とを、相対回転不能に係合させている。具体的には、この係合部を、インボリュートスプライン係合部24dとしている。尚、この係合部として、キー係合部等の、他の回転防止構造を持った係合部を採用する事もできる。又、この状態で、前記入力軸13の内周面に係止した、前記止め輪25aと別の止め輪25cとにより、前記鍔部34を軸方向両側から挟持し、前記連結軸9の軸方向変位を阻止している。尚、前記トーションバー15の一端部と、前記連結軸9の一端部とに設けた、前記両インボリュートスプライン係合部24a、24dを構成する両雌インボリュートスプライン部は、前記入力軸13の内周面の他半部に互いに連続して設けられた、諸元の等しいものである。即ち、本例の場合には、これら両雌インボリュートスプライン部として、前記第一雌インボリュートスプライン部63を共用している。
又、前記第一エンコーダ10は、前記連結軸9の他端部に、この連結軸9と同心に外嵌固定されている。即ち、この第一エンコーダ10は、この連結軸9を介して、前記入力軸13に支持固定されている。この為、この第一エンコーダ10は、この入力軸13と共に(同期して)回転可能である。又、前記第二エンコーダ11は、前記出力軸14の他端部に、この出力軸14と同心に外嵌固定されている。従って、この第二エンコーダ11は、この出力軸14と共に(同期して)回転可能である。
又、前記第一、第二両エンコーダ10、11は、それぞれ前記連結軸9の他端部又は前記出力軸14の他端部に外嵌固定された、磁性金属製で円環状の芯金35(36)と、この芯金35(36)の外周部に存在する円筒部の外周面に固定された、円筒状の永久磁石37(38)とから成る。そして、前記第一エンコーダ10を構成する永久磁石37の外周面を、第一被検出部39とし、又、前記第二エンコーダ11を構成する永久磁石38の外周面を、第二被検出部40としている。これら第一、第二両被検出部39、40は、互いの直径が等しく、互いに同心に、且つ、軸方向に隣り合う状態で近接(例えば軸方向に10mm以内、好ましくは5mm以内の間隔をあけて)配置されている。又、これら両被検出部39、40には、図9に示す様に、それぞれS極とN極とが、円周方向に関して交互に且つ等ピッチで配置されている。これら両被検出部39、40の磁極(S極、N極)の総数は、互いに一致している。又、本例の場合、トルクの非伝達時の状態、即ち、前記トーションバー15が弾性的に捩れ変形しておらず、前記両被検出部39、40が回転方向に相対変位していない状態で、前記両被検出部39、40の磁極の周方向位相が、図9に示す様に、互いに一致している。即ち、これら両被検出部39、40の同極同士が、軸方向に隣り合わせで配置されている。尚、本例の場合、前記第一エンコーダ10を構成する芯金35の内周面と、前記連結軸9の他端部外周面との嵌合部を、同心性を確保する為の円筒面嵌合部26bと、相対回転を防止する為のインボリュートスプライン係合部24eとを、軸方向に隣接配置する事により構成している。これと共に、前記連結軸9の他端部外周面に係止した止め輪25dにより、前記芯金35の抜け止めを図っている。又、前記第二エンコーダ11を構成する芯金36は、前記出力軸14の他端部に締り嵌めで外嵌固定されている。
又、前記センサユニット12は、合成樹脂製のホルダ41と、このホルダ41の先端部に包埋された、第一、第二両センサ42a、42bとを備える。これら両センサ42a、42bの検出部には、それぞれホール素子、ホールIC、MR素子、GMR素子等の磁気検出素子を組み込んでいる。この様なセンサユニット12は、前記第一センサ42aの検出部を前記第一被検出部39に、前記第二センサ42bの検出部を前記第二被検出部40に、それぞれ近接対向させた状態で、前記ハウジングに支持されている。特に、本例の場合には、図10に示す様に、前記両センサ42a、42bを互いに逆向きに配置した状態で、これら両センサ42a、42bの検出部を前記両被検出部39、40の円周方向同位置に対向させている。これにより、伝達トルクがゼロとなる回転状態で、前記両センサ42a、42bの出力信号同士の間の位相差が180度(前記位相差比が0.5)になる様にしている。
又、本例の場合、前記連結軸9の径方向中心部に、この連結軸9の一端面にのみ開口する油導入路43を設けている。そして、この油導入路43の端部開口を通じて、この油導入路43内に導入した潤滑油を、前記両円すいころ軸受29a、29bの内部に供給する様にしている。この為に、前記連結軸9と前記トーションバー15と前記入力軸13及び出力軸14との両端寄り部分に、それぞれ油路44a、44bを設けている。そして、これら両油路44a、44bにより、前記油導入路43の両端寄り部分と、前記両円すいころ軸受29a、29bの内輪30a、30bの小径側端部の内径側に存在する微小な環状空間45a、45bとを連通している。更に、前記両ナット32a、32bの先端面の円周方向1乃至複数箇所に、それぞれ径方向に亙る油溝46a、46bを形成している。これにより、前記油導入路43の端部開口からこの油導入路43内に導入した潤滑油を、前記両油路44a、44bと前記両環状空間45a、45bと前記各油溝46a、46bとを通じて、前記両円すいころ軸受29a、29bの内部に供給する様にしている。
更に、本例の場合には、前記両油路44a、44bに送り込んだ潤滑油の一部を、これら両油路44a、44bの中間部から前記両インボリュートスプライン係合部24a、24bに存在する隙間を通じて、前記トーションバー15の中間部外周面と、前記入力軸13及び出力軸14の中間部内周面との間に存在する、円筒状空間47内に送り込む様にしている。そして、この円筒状空間47内に送り込んだ潤滑油を、前記入力側組み合わせ用筒部16の先端面48と、前記出力側組み合わせ用筒部17の内周面の基端部に存在する段差面49との間に存在する隙間を通じて、前記ラジアルニードル軸受18の設置部と、前記スラストワッシャ21の挟持部とに供給し、これら設置部及び挟持部を潤滑する様にしている。この際に、この挟持部に到達した潤滑油は、この挟持部の潤滑に供されつつ、前記スラストワッシャ21に設けた複数のスリット22、22を通じて、この挟持部を円滑に通過する。この結果、前記ラジアルニードル軸受18の設置部及び前記スラストワッシャ21の挟持部への潤滑油の供給が効率良く行なわれ、これら設置部及び挟持部の潤滑状態が良好になる。
尚、本発明を実施する場合には、図11の(A)に示した様なスラストワッシャ21に代えて、同図の(B)に示す様な、外周部の補強用円筒部を省略したスラストワッシャ21aや、同図の(C)に示す様な、外周部の補強用円筒部と複数のスリットとを省略した、単なる円輪状のスラストワッシャ21bを使用する事もできる。但し、上述した設置部及び挟持部の潤滑状態を良好にする観点からは、(A)(B)に示したスリット22、22付のスラストワッシャ21、21aを使用するのが好ましい。更に、外周部(特に前記各スリット22、22の基端部周辺)の強度を確保する観点からは、(A)に示した補強用円筒部23付のスラストワッシャ21を使用するのが好ましい。
又、本例の場合、前記両油路44a、44bに送り込んだ潤滑油は、これら両油路44a、44bの中間部から、前記トーションバー15の内周面と前記連結軸9の外周面との間に存在する微小隙間(径方向厚さが0.2mm程度となる円筒状の隙間)内にも送り込まれる。特に、本例の場合には、この様な微小隙間内への潤滑油の送り込みが円滑に行われる様にする為、前記連結軸9の外周面のうち、軸方向に関して前記両油路44a、44bと整合する部分に、全周に亙る凹溝66a、66bを設けている。運転時に、前記微小隙間に充満した潤滑油は、前記連結軸9を微小振動を減衰させる、フィルムダンパとしての機能を発揮する。
上述の様に構成する本例のトルク測定装置付回転伝達装置の場合、前記センサユニット12を構成する第一、第二両センサ42a、42bの出力信号は、前記回転軸ユニット6(前記入力軸13及び出力軸14)と共に前記第一、第二両エンコーダ10、11が回転する事に伴い、それぞれ周期的に変化する。ここで、この変化の周波数(及び周期)は、前記回転軸ユニット6の回転速度に見合った値をとる。従って、これら周波数(又は周期)と回転速度との関係を予め調べておけば、この周波数(又は周期)に基づいて、この回転速度を求められる。又、本例の場合、前記回転軸ユニット6により、前記入力歯車7と前記出力歯車8との間でトルクを伝達する際には、前記トーションバー15の軸方向中間部が弾性的に捩れ変形する事に伴い、前記両歯車7、8同士(前記両軸13、14同士、前記両エンコーダ10、11同士)が回転方向に相対変位する。そして、この様に両エンコーダ10、11同士が回転方向に相対変位する結果、前記第一、第二両センサ42a、42bの出力信号同士の間の位相差比(=位相差/1周期)が変化する。ここで、この位相差比は、前記トルクに見合った値をとる。従って、これら位相差比とトルクとの関係を予め調べておけば、この位相差比に基づいて、このトルクを求められる。
特に、本例の場合には、外周面の軸方向中間部に前記入力歯車7を固定した前記入力軸13と、外周面の軸方向中間部に前記出力歯車8を固定した前記出力軸14とを、それぞれ中空状に構成すると共に、その両端部をこれら両軸13、14に対して相対回転不能に連結した前記トーションバー15を、これら両軸13、14の内径側に配置している。この為、このトーションバー15の軸方向中間部の軸方向寸法Lを、前記両歯車7、8同士の軸方向間隔Wよりも大きく(L>W)できる。従って、トルクの伝達時に生じる、前記トーションバー15の軸方向中間部の弾性的な捩り変形量を十分に確保できる。この結果、本例の場合には、前記回転軸ユニット6を一体の回転軸とした構造と異なり、前記両歯車7、8同士の軸方向間隔Wの広狭に拘らず、前記トルクの伝達時に生じる、これら両歯車7、8同士(前記両軸13、14同士、前記両エンコーダ10、11同士)の回転方向の相対変位量を十分に大きくできる。従って、トルク測定の分解能を十分に高める事ができる。又、本例の場合には、設計の段階で、前記トーションバー15の軸方向中間部の径方向寸法や軸方向寸法を調節する事により、この軸方向中間部の捩り剛性を容易に調節できる。この為、前記回転軸ユニット6を一体の回転軸とした構造に比べて、前記トルクと前記回転方向の相対変位量との関係(ゲイン)を、所望の値に設計し易くできる。
又、本例の場合には、使用するセンサユニット12が1個で済む為、このセンサユニット12から引き出される図示しないハーネスの本数を1本にできて、このハーネスの配設を容易に行える。又、前記ハウジングに設ける前記センサユニット12の支持固定部も1箇所で済む為、このハウジングの加工を容易にできる。
尚、本発明を実施する場合には、上述した実施の形態の第1例に於ける、第一、第二両エンコーダの被検出部と、センサユニットを構成する1対のセンサの検出部との対向方向を、径方向から軸方向に変更した構成を採用する事もできる。この場合には、第一、第二両エンコーダの被検出部を、互いの径寸法が異なる1対の円輪状の被検出部とすると共に、これら両被検出部を、軸方向に関して同方向に向けた状態で、互いに同心に(径方向に重畳させて)配置する。そして、これら両被検出部にセンサユニットを構成する1対のセンサの検出部を軸方向に対向させる。
[実施の形態の第2例]
図12〜13は、請求項1、3、5に対応する、本発明の実施の形態の第2例を示している。本例の場合には、トルクの非伝達時の状態で、第一、第二両エンコーダ10、11の被検出部39、40の磁極の周方向位相を、図12に示す様に、互いに180度ずらせている。即ち、これら両被検出部39、40の異極同士を、軸方向に隣り合わせで配置している。又、図13に示す様に、センサユニット12を構成する1対のセンサ42a、42bを互いに同じ向きに配置した状態で、これら両センサ42a、42bの検出部を前記両被検出部39、40の円周方向同位置に対向させている。これにより、伝達トルクがゼロとなる回転状態で、前記両センサ42a、42bの出力信号同士の間の位相差が180度(位相差比が0.5)になる様にしている。
図12〜13は、請求項1、3、5に対応する、本発明の実施の形態の第2例を示している。本例の場合には、トルクの非伝達時の状態で、第一、第二両エンコーダ10、11の被検出部39、40の磁極の周方向位相を、図12に示す様に、互いに180度ずらせている。即ち、これら両被検出部39、40の異極同士を、軸方向に隣り合わせで配置している。又、図13に示す様に、センサユニット12を構成する1対のセンサ42a、42bを互いに同じ向きに配置した状態で、これら両センサ42a、42bの検出部を前記両被検出部39、40の円周方向同位置に対向させている。これにより、伝達トルクがゼロとなる回転状態で、前記両センサ42a、42bの出力信号同士の間の位相差が180度(位相差比が0.5)になる様にしている。
上述の様な構成を有する本例の構造の場合、前記第一、第二両エンコーダ10、11を使用箇所に組み付ける以前の状態で、これら両エンコーダ10、11を構成する永久磁石37、38の互いに対向する軸方向端面同士を磁気吸着させると、これら両エンコーダ10、11の磁極の周方向位相が、図12に示した様に、互いに180度ずれた状態となる。この為、この状態で前記両エンコーダ10、11の組付け作業を行えば、組付け後の状態で、図12に示した様な磁極の配置関係を実現する事が容易になる。
その他の構成及び作用は、上述した実施の形態の第1例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
その他の構成及び作用は、上述した実施の形態の第1例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
尚、上述した実施の形態の第1〜2例の構造を実施する場合には、前記第一、第二両エンコーダ10、11を、図9又は図12に示した様な、所定の位置関係で使用箇所に組み付けられる様にする為に、これら両エンコーダ10、11の一部分に、それぞれ互いの磁極の円周方向に関する相対的な位置関係を規定する為の規定部を設ける事が好ましい。この様な規定部を設けた構造例を、以下、本発明の実施の形態の第3〜5例として説明する。
[実施の形態の第3例]
図14〜15は、請求項1、3、5に対応する、本発明の実施の形態の第3例を示している。本例の場合には、第一エンコーダ10fを構成する芯金35bに、それぞれが規定部である2個の通孔67a、67bを円周方向に離隔して設けている。これと共に、第二エンコーダ11fを構成する芯金36bに、規定部である1個の凹孔68を設けている。これら両エンコーダ10f、11fの中心軸同士を一致させた状態で、前記両通孔67a、67bと前記凹孔68との径方向位置は、互いに等しくなっている。又、これら両通孔67a、67bのピッチ(互いの円周方向に関する中心間距離)は、前記両エンコーダ10f、11fの1着磁ピッチ(円周方向に隣り合うS極とN極との円周方向に関する中心間距離)と等しくなっている。
図14〜15は、請求項1、3、5に対応する、本発明の実施の形態の第3例を示している。本例の場合には、第一エンコーダ10fを構成する芯金35bに、それぞれが規定部である2個の通孔67a、67bを円周方向に離隔して設けている。これと共に、第二エンコーダ11fを構成する芯金36bに、規定部である1個の凹孔68を設けている。これら両エンコーダ10f、11fの中心軸同士を一致させた状態で、前記両通孔67a、67bと前記凹孔68との径方向位置は、互いに等しくなっている。又、これら両通孔67a、67bのピッチ(互いの円周方向に関する中心間距離)は、前記両エンコーダ10f、11fの1着磁ピッチ(円周方向に隣り合うS極とN極との円周方向に関する中心間距離)と等しくなっている。
又、本例の場合、製造段階で、前記両エンコーダ10f、11fの着磁を行う際には、図15に示す様に、これら両エンコーダ10f、11fの中心軸同士を一致させた状態で、前記両通孔67a、67bのうちの何れか一方の通孔67a(又は67b)と前記凹孔68とに、それぞれ規定部材としてのピン69をがたつきなく挿通若しくは挿入する。これにより、前記両エンコーダ10f、11f同士の円周方向の位置決めを図る。そして、この状態で、これら両エンコーダ10f、11fの被検出部39、40に対して同時に、互いに等しい周方向位相でS極とN極とを、円周方向に関して交互に且つ等ピッチで着磁する作業を行う。
その後、前記両エンコーダ10f、11fを、図9に示した位置関係で使用箇所に組み付ける際には、上述した着磁時と同じ態様で、前記ピン69により前記両エンコーダ10f、11f同士の円周方向の位置決めを図りながら、これら両エンコーダ10f、11fを使用箇所に組み付ける作業を行う。これに対し、前記両エンコーダ10f、11fを、図12に示した位置関係で使用箇所に組み付ける際には、前記ピン69を挿通する通孔を、前記一方の通孔67a(又は67b)から他方の通孔67b(又は67a)に変更した状態、即ち、これら両エンコーダ10f、11f同士の円周方向に関する相対的な位置関係を、上述した着磁時の位置関係に対して1着磁ピッチ分ずらせた状態で、前記両エンコーダ10f、11fを使用箇所に組み付ける作業を行う。尚、何れの場合も、これら両エンコーダ10f、11fを使用箇所に組み付けた(固定した)後、前記通孔67a(又は67b)及び凹孔68から前記ピン69を抜き取る。
以上の様にして前記両エンコーダ10f、11fの組み付け作業を行えば、これら両エンコーダ10f、11fを、図9又は図12に示した位置関係で使用箇所に組み付ける作業を、容易且つ正確に行える。
尚、前記凹孔68に代えて、前記ピン69をがたつきなく挿通可能な通孔を設けても良い。
その他の構成及び作用は、上述した実施の形態の第1〜2例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
尚、前記凹孔68に代えて、前記ピン69をがたつきなく挿通可能な通孔を設けても良い。
その他の構成及び作用は、上述した実施の形態の第1〜2例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
[実施の形態の第4例]
図16は、請求項1、3、5に対応する、本発明の実施の形態の第4例を示している。本例の場合には、第一エンコーダ10gを構成する永久磁石37bの軸方向一端面(第二エンコーダ11g側の端面)に、それぞれが規定部である1対の凹部70a、70bを円周方向に離隔して設けている。これと共に、前記第二エンコーダ11gを構成する永久磁石38bの軸方向一端面(前記第一エンコーダ10g側の端面)に、規定部である1個の凸部71を設けている。前記両凹部70a、70bのピッチは、前記両エンコーダ10g、11gの1着磁ピッチと等しくなっている。
図16は、請求項1、3、5に対応する、本発明の実施の形態の第4例を示している。本例の場合には、第一エンコーダ10gを構成する永久磁石37bの軸方向一端面(第二エンコーダ11g側の端面)に、それぞれが規定部である1対の凹部70a、70bを円周方向に離隔して設けている。これと共に、前記第二エンコーダ11gを構成する永久磁石38bの軸方向一端面(前記第一エンコーダ10g側の端面)に、規定部である1個の凸部71を設けている。前記両凹部70a、70bのピッチは、前記両エンコーダ10g、11gの1着磁ピッチと等しくなっている。
又、本例の場合、製造段階で、前記両エンコーダ10g、11gの着磁を行う際には、図16の(A)に示す状態から、これら両エンコーダ10g、11gを構成する永久磁石37b、38bの軸方向一端面同士を突き合わせると共に、前記両凹部70a、70bのうちの一方の凹部70aと前記凸部71とを係合させる事により、前記両エンコーダ10g、11g同士の円周方向の位置決めを図る。そして、この状態で、これら両エンコーダ10g、11gの被検出部39、40に対して同時に、図16の(A)に示す様に、互いに等しい周方向位相でS極とN極とを、円周方向に関して交互に且つ等ピッチで着磁する作業を行う。
その後、前記両エンコーダ10g、11gを、図9に示した位置関係で使用箇所に組み付ける際には、上述した着磁時と同じ態様で、前記両エンコーダ10g、11g同士の円周方向の位置決めを図りながら、これら両エンコーダ10g、11gを使用箇所に組み付ける作業を行う。これに対し、前記両エンコーダ10g、11gを、図12に示した位置関係で使用箇所に組み付ける際には、図16の(B)に示す状態から、これら両エンコーダ10g、11gを構成する永久磁石37b、38bの軸方向一端面同士を突き合わせると共に、前記両凹部70a、70bのうちの他方の凹部70bと前記凸部71とを係合させる事により、前記両エンコーダ10g、11g同士の円周方向の位置決めを図る。そして、この状態で、これら両エンコーダ10g、11gを使用箇所に組み付ける作業を行う。
以上の様にして前記両エンコーダ10g、11gの組み付け作業を行えば、これら両エンコーダ10g、11gを、図9又は図12に示した位置関係で使用箇所に組み付ける作業を、容易且つ正確に行える。
その他の構成及び作用は、前述した実施の形態の第1〜2例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
その他の構成及び作用は、前述した実施の形態の第1〜2例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
[実施の形態の第5例]
図17は、請求項1、3、5に対応する、本発明の実施の形態の第5例を示している。本例の場合には、第一エンコーダ10hを構成する永久磁石37cの軸方向他端面(第二エンコーダ11hと反対側の端面)と、この第二エンコーダ11hを構成する永久磁石38cの軸方向一端面(前記第一エンコーダ10h側の端面)とに、それぞれが規定部である、凹部や凸部等の1対ずつの目印部72a、72b(73a、73b)を、円周方向に離隔して設けている。前記第一エンコーダ10hに設けた前記両目印部72a、72bの円周方向位置は、この第一エンコーダ10hの被検出部39に存在する、円周方向に隣り合う2つの着磁境界(S極とN極との境界)の円周方向位置と一致している。又、前記第二エンコーダ11hに設けた前記両目印部73a、73bの円周方向位置は、この第二エンコーダ11hの被検出部40に存在する、円周方向に隣り合う2つの着磁境界の円周方向位置と一致している。
図17は、請求項1、3、5に対応する、本発明の実施の形態の第5例を示している。本例の場合には、第一エンコーダ10hを構成する永久磁石37cの軸方向他端面(第二エンコーダ11hと反対側の端面)と、この第二エンコーダ11hを構成する永久磁石38cの軸方向一端面(前記第一エンコーダ10h側の端面)とに、それぞれが規定部である、凹部や凸部等の1対ずつの目印部72a、72b(73a、73b)を、円周方向に離隔して設けている。前記第一エンコーダ10hに設けた前記両目印部72a、72bの円周方向位置は、この第一エンコーダ10hの被検出部39に存在する、円周方向に隣り合う2つの着磁境界(S極とN極との境界)の円周方向位置と一致している。又、前記第二エンコーダ11hに設けた前記両目印部73a、73bの円周方向位置は、この第二エンコーダ11hの被検出部40に存在する、円周方向に隣り合う2つの着磁境界の円周方向位置と一致している。
本例の場合、前記両エンコーダ10h、11hを使用箇所に組み付ける作業は、組み付け後の状態で、前記両目印部72a、72bと前記両目印部73a、73bとの円周方向位置が両方とも一致する様に、又は、前記目印部72a(又は72b)と前記目印部73b(又は73a)との円周方向位置が一致する様に、これら各目印部72a、72b(73a、73b)を目視により確認しながら行う。
以上の様にして前記両エンコーダ10h、11hの組み付け作業を行えば、これら両エンコーダ10h、11hを、図9又は図12に示した位置関係で使用箇所に組み付ける作業を、容易且つ正確に行える。
その他の構成及び作用は、前述した実施の形態の第1〜2例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
その他の構成及び作用は、前述した実施の形態の第1〜2例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
[実施の形態の第6例]
図18〜20により、請求項1、3、5に対応する、本発明の実施の形態の第6例に就いて説明する。本例の場合には、トーションバー15b(全体構成に就いては、図6の「トーションバー15」参照)のうち、一端部外周面に設けた第一雄インボリュートスプライン部62aの表層部に第一メッキ層74を、他端部外周面に設けた第二雄インボリュートスプライン部64aの表層部に第二メッキ層75を、それぞれ設けている。これら第一、第二両メッキ層74、75を構成する金属は、前記トーションバー15bと入力軸13と出力軸14(図6参照)とを構成する、炭素鋼の如き合金鋼よりも軟質の、銅、ニッケル等である。そして、前記第一雄インボリュートスプライン部62a(前記第二雄インボリュートスプライン部64a)を、前記入力軸13の内周面に設けた第一雌インボリュートスプライン部63a(前記出力軸14の内周面に設けた第二雌インボリュートスプライン部65a)に対し、前記第一メッキ層74(前記第二メッキ層75)の自由状態での厚さ寸法よりも小さい締め代を持って圧入している。これにより、図18に示す様に、前記第一雄インボリュートスプライン部62a(前記第二雄インボリュートスプライン部64a)と、前記第一雌インボリュートスプライン部63a(前記第二雌インボリュートスプライン部65a)とを周方向のがたつきなく係合させる事により、インボリュートスプライン係合部24a1(インボリュートスプライン係合部24b1)を構成している。特に、本例の場合には、前記第一雄インボリュートスプライン部62a(前記第二雄インボリュートスプライン部64a)と前記第一雌インボリュートスプライン部63a(前記第二雌インボリュートスプライン部65a)との互いの歯面同士の間で、前記第一メッキ層74(前記第二メッキ層75)を押し潰す事により、前記インボリュートスプライン係合部24a1(前記インボリュートスプライン係合部24b1)の周方向のがたつきをなくしている。これに対し、前記第一雄インボリュートスプライン部62a(前記第二雄インボリュートスプライン部64a)と前記第一雌インボリュートスプライン部63a(前記第二雌インボリュートスプライン部65a)との互いの歯先と歯底との間には隙間を残し、これら各隙間を潤滑油通路として機能させる様にしている。
図18〜20により、請求項1、3、5に対応する、本発明の実施の形態の第6例に就いて説明する。本例の場合には、トーションバー15b(全体構成に就いては、図6の「トーションバー15」参照)のうち、一端部外周面に設けた第一雄インボリュートスプライン部62aの表層部に第一メッキ層74を、他端部外周面に設けた第二雄インボリュートスプライン部64aの表層部に第二メッキ層75を、それぞれ設けている。これら第一、第二両メッキ層74、75を構成する金属は、前記トーションバー15bと入力軸13と出力軸14(図6参照)とを構成する、炭素鋼の如き合金鋼よりも軟質の、銅、ニッケル等である。そして、前記第一雄インボリュートスプライン部62a(前記第二雄インボリュートスプライン部64a)を、前記入力軸13の内周面に設けた第一雌インボリュートスプライン部63a(前記出力軸14の内周面に設けた第二雌インボリュートスプライン部65a)に対し、前記第一メッキ層74(前記第二メッキ層75)の自由状態での厚さ寸法よりも小さい締め代を持って圧入している。これにより、図18に示す様に、前記第一雄インボリュートスプライン部62a(前記第二雄インボリュートスプライン部64a)と、前記第一雌インボリュートスプライン部63a(前記第二雌インボリュートスプライン部65a)とを周方向のがたつきなく係合させる事により、インボリュートスプライン係合部24a1(インボリュートスプライン係合部24b1)を構成している。特に、本例の場合には、前記第一雄インボリュートスプライン部62a(前記第二雄インボリュートスプライン部64a)と前記第一雌インボリュートスプライン部63a(前記第二雌インボリュートスプライン部65a)との互いの歯面同士の間で、前記第一メッキ層74(前記第二メッキ層75)を押し潰す事により、前記インボリュートスプライン係合部24a1(前記インボリュートスプライン係合部24b1)の周方向のがたつきをなくしている。これに対し、前記第一雄インボリュートスプライン部62a(前記第二雄インボリュートスプライン部64a)と前記第一雌インボリュートスプライン部63a(前記第二雌インボリュートスプライン部65a)との互いの歯先と歯底との間には隙間を残し、これら各隙間を潤滑油通路として機能させる様にしている。
本例の場合には、上述の様な締め代を設定する為に、前記第一メッキ層74(前記第二メッキ層75)の自由状態での厚さ寸法Tを、図19に示す様な、前記第一雄インボリュートスプライン部62a(前記第二雄インボリュートスプライン部64a)に前記第一メッキ層74(前記第二メッキ層75)を形成する以前の状態での、前記各歯面同士の間隔tよりも大きく(T>t)している。この間隔tは、前記図19に示した状態で、前記第一雄インボリュートスプライン部62a(前記第二雄インボリュートスプライン部64a)と前記第一雌インボリュートスプライン部63a(前記第二雌インボリュートスプライン部65a)との、径方向に関する相対移動可能量である2dを測定する事に基づいて、t=d・sinθ(θ:設計で定められた半径線に対する歯面の角度)として求める事ができる。尚、この間隔tは、その他の方法で求める事もでき、例えば、前記第一メッキ層74(前記第二メッキ層75)を形成する以前の前記第一雄インボリュートスプライン部62a(前記第二雄インボリュートスプライン部64a)の各部の寸法と、前記第一雌インボリュートスプライン部63a(前記第二雌インボリュートスプライン部65a)の各部の寸法とを、従来から知られている測定ピンにより測定する事に基づいて、前記間隔tを求める事もできる。
上述の様な構成を有する本例のトルク測定装置付回転伝達装置の場合も、前記両インボリュートスプライン係合部24a1、24b1が、それぞれ周方向のがたつきを生じない係合部になっている。この為、トルクが入力される側の回転軸である、前記入力軸13の回転方向が反転する際に、前記両インボリュートスプライン係合部24a1、24b1で、がたつきの原因となる周方向隙間分の相対回転が生じる事を防止できる。この結果、この様な相対回転が生じる事に基づいて、微小トルクの測定を正確に行えなくなると言った不都合が生じる事を防止できる。
即ち、前記入力軸13の回転方向が反転する際に、前記両インボリュートスプライン係合部24a1、24b1で、がたつきの原因となる周方向隙間分の相対回転が生じると、これに伴って、第一、第二両エンコーダ10、11(例えば図6参照)同士の間にも、同様の相対回転が生じる。この結果、図20に破線βで示す様に、センサ出力とトルクとの関係を表す特性曲線が、トルク=0及びその近傍部分で急激に変化する態様の非線形性を示し、微小トルクの測定を正確に行えなくなる。
これに対し、本例(及び上述した実施の形態の各例)の場合には、前記入力軸13の回転方向が反転する際に、前記両インボリュートスプライン係合部24a1、24b1で、がたつきの原因となる周方向隙間分の相対回転が生じる事を防止できる為、前記第一、第二両エンコーダ10、11同士の間でも、同様の相対回転が生じる事を防止できる。この結果、図20に実線αで示す様に、センサ出力とトルクとの関係を表す特性曲線の線形性が全体的に保たれる為、微小トルクの測定を正確に行える。
これに対し、本例(及び上述した実施の形態の各例)の場合には、前記入力軸13の回転方向が反転する際に、前記両インボリュートスプライン係合部24a1、24b1で、がたつきの原因となる周方向隙間分の相対回転が生じる事を防止できる為、前記第一、第二両エンコーダ10、11同士の間でも、同様の相対回転が生じる事を防止できる。この結果、図20に実線αで示す様に、センサ出力とトルクとの関係を表す特性曲線の線形性が全体的に保たれる為、微小トルクの測定を正確に行える。
又、本例の場合、前記第一、第二両雄インボリュートスプライン部62a、64aを前記第一、第二両雌インボリュートスプライン部63a、65aに圧入する際に、締め代分の変形(弾性変形又は塑性変形)の大部分は、比較的軟質の前記第一、第二両メッキ層74、75に生じる。この為、前記両インボリュートスプライン係合部24a1、24b1のがたつきの原因となる周方向隙間を、前記第一、第二両メッキ層74、75により効率良く埋める(無くす)事ができる。これと共に、前記第一、第二両メッキ層74、75を構成する銅やニッケルの変形は、前記各インボリュートスプライン部62a、64a、63a、65aの本体部分を構成する鋼の変形に比べて小さい力で生じる為、圧入に要する力を低く抑えられる。又、本例の場合には、前記第一、第二両メッキ層74、75を構成する金属として、銅、ニッケル等の、適正な耐圧潰性及び剛性を有する金属を使用している為、長期に亙る使用によっても、これら両メッキ層74、75と前記両雌インボリュートスプライン部63a、65aの歯面との間に隙間を生じにくくできる。
その他の構成及び作用は、上述した実施の形態の第1〜5例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
その他の構成及び作用は、上述した実施の形態の第1〜5例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
尚、上述した実施の形態の第6例では、前記両インボリュートスプライン係合部24a1、24b1に関してのみ、比較的軟質のメッキ層により周方向のがたつきをなくす構造を採用したが、本発明を実施する場合には、その他のインボリュートスプライン係合部24c〜24e(図6参照)に関しても、適宜、比較的軟質のメッキ層により周方向のがたつきをなくす構造を採用する事ができる。
又、本発明を実施する場合には、何れのインボリュートスプライン係合部24a〜24e(図6参照)に関しても、周方向の微小ながたつきを生じる係合部とする事もできる。尚、トーションバー15b(図6参照)の両端部に存在する1対のインボリュートスプライン係合部24a、24bを、それぞれ周方向の微小ながたつきを生じる係合部とすると、センサ出力とトルクとの関係を表す特性曲線が、図20に破線βで示した様になり、微小トルクの測定を正確に行えなくなる。但し、それ以外の領域でのトルクの測定は正確に行える為、微小トルクの測定を必要としない用途では、この様な構成を採用しても、特に問題とはならない。
又、本発明を実施する場合には、何れのインボリュートスプライン係合部24a〜24e(図6参照)に関しても、周方向の微小ながたつきを生じる係合部とする事もできる。尚、トーションバー15b(図6参照)の両端部に存在する1対のインボリュートスプライン係合部24a、24bを、それぞれ周方向の微小ながたつきを生じる係合部とすると、センサ出力とトルクとの関係を表す特性曲線が、図20に破線βで示した様になり、微小トルクの測定を正確に行えなくなる。但し、それ以外の領域でのトルクの測定は正確に行える為、微小トルクの測定を必要としない用途では、この様な構成を採用しても、特に問題とはならない。
[実施の形態の第7例]
図21〜22は、請求項1、3、5に対応する、本発明の実施の形態の第7例を示している。本例の場合には、連結軸9bの一端部に設けた鍔部34aを、入力軸13aの他端部に締り嵌めで内嵌固定している。具体的には、前記鍔部34aの外周面を円筒面76とし、この円筒面76を、前記入力軸13aの他端部内周面に設けた円筒面77に、締り嵌めで嵌合させている。この様な構成を有する本例の場合には、前記連結軸9bの一端部を前記入力軸13aに相対回転不能に連結する部分の構造を簡素化でき、その分、製造コストを抑えられる。
その他の構成及び作用は、上述した実施の形態の第1〜6例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
図21〜22は、請求項1、3、5に対応する、本発明の実施の形態の第7例を示している。本例の場合には、連結軸9bの一端部に設けた鍔部34aを、入力軸13aの他端部に締り嵌めで内嵌固定している。具体的には、前記鍔部34aの外周面を円筒面76とし、この円筒面76を、前記入力軸13aの他端部内周面に設けた円筒面77に、締り嵌めで嵌合させている。この様な構成を有する本例の場合には、前記連結軸9bの一端部を前記入力軸13aに相対回転不能に連結する部分の構造を簡素化でき、その分、製造コストを抑えられる。
その他の構成及び作用は、上述した実施の形態の第1〜6例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
[実施の形態の第8例]
図23は、請求項1、3〜5に対応する、本発明の実施の形態の第8例を示している。本例の場合には、ハウジングに対して回転軸ユニット6bを回転自在に支持する1対の円すいころ軸受29c、29dのうち、一方の円すいころ軸受29cを構成する内輪30cを入力軸13bと一体に造ると共に、他方の円すいころ軸受29dを構成する内輪30dを出力軸14aと一体に造っている。これに伴い、本例の場合には、これら両内輪30c、30dの抜け止めを図る為のナット32a、32b(例えば図6参照)を省略している。又、本例の場合には、前記入力軸13bに外嵌固定する入力歯車7の内径寸法を、前記内輪30cの外径寸法よりも大きくしている。これにより、前記入力軸13bに対して前記入力歯車7を着脱する際に、この入力歯車7が前記内輪30cの周囲を軸方向に通過できる様にしている。
図23は、請求項1、3〜5に対応する、本発明の実施の形態の第8例を示している。本例の場合には、ハウジングに対して回転軸ユニット6bを回転自在に支持する1対の円すいころ軸受29c、29dのうち、一方の円すいころ軸受29cを構成する内輪30cを入力軸13bと一体に造ると共に、他方の円すいころ軸受29dを構成する内輪30dを出力軸14aと一体に造っている。これに伴い、本例の場合には、これら両内輪30c、30dの抜け止めを図る為のナット32a、32b(例えば図6参照)を省略している。又、本例の場合には、前記入力軸13bに外嵌固定する入力歯車7の内径寸法を、前記内輪30cの外径寸法よりも大きくしている。これにより、前記入力軸13bに対して前記入力歯車7を着脱する際に、この入力歯車7が前記内輪30cの周囲を軸方向に通過できる様にしている。
上述の様に構成する本例の場合には、単独部品としての前記両内輪30c、30d、及び、前記両ナット32a、32bを省略できる分、部品点数及び組立工数の削減、構造の簡素化、小型軽量化、及び製造コストの低減を図れると共に、前記両内輪30c、30dの大鍔部の強度向上、及び前記両円すいころ軸受29c、29dの配置の自由度向上を図れる。
その他の構成及び作用は、上述した実施の形態の第1〜7例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
その他の構成及び作用は、上述した実施の形態の第1〜7例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
[実施の形態の第9例]
図24〜28は、請求項1、3、6に対応する、本発明の実施の形態の第9例を示している。本例の場合、連結軸9の他端部に外嵌固定された第一エンコーダ10aは、磁性金属により、断面L字形で全体を円環状に造られており、外周部を平歯車状の第一被検出部39aとしている。即ち、この第一被検出部39aは、それぞれが前記第一エンコーダ10aの外周寄り部分から外径側に突出した複数の凸部50、50を、円周方向に関して等ピッチで配置して成る。尚、本例の場合、前記第一被検出部39aのうち、前記各凸部50、50が、それぞれ請求項6に記載した充実部に相当し、円周方向に隣り合うこれら各凸部50、50同士の間部分が、それぞれ請求項6に記載した除肉部に相当する。
図24〜28は、請求項1、3、6に対応する、本発明の実施の形態の第9例を示している。本例の場合、連結軸9の他端部に外嵌固定された第一エンコーダ10aは、磁性金属により、断面L字形で全体を円環状に造られており、外周部を平歯車状の第一被検出部39aとしている。即ち、この第一被検出部39aは、それぞれが前記第一エンコーダ10aの外周寄り部分から外径側に突出した複数の凸部50、50を、円周方向に関して等ピッチで配置して成る。尚、本例の場合、前記第一被検出部39aのうち、前記各凸部50、50が、それぞれ請求項6に記載した充実部に相当し、円周方向に隣り合うこれら各凸部50、50同士の間部分が、それぞれ請求項6に記載した除肉部に相当する。
又、出力軸14の他端部に外嵌固定された第二エンコーダ11aは、磁性金属板により、全体を円筒状に造られており、前記出力軸14の他端面から軸方向に突出した先半部を、櫛歯状の第二被検出部40aとしている。即ち、この第二被検出部40aは、それぞれが前記第二エンコーダ11aの軸方向中間部から軸方向先端側に延出した複数の舌片51、51を、円周方向に関して等ピッチで配置して成る。これら各舌片51、51の総数は、前記各凸部50、50の総数と一致している。又、これら各舌片51、51の中心角で表される円周方向幅は、前記各凸部50、50の中心角で表される円周方向幅と等しい。尚、本例の場合、前記第二被検出部40aのうち、前記各舌片51、51が、それぞれ請求項6に記載した充実部に相当し、円周方向に隣り合うこれら各舌片51、51同士の間部分が、それぞれ請求項6に記載した除肉部に相当する。
又、本例の場合には、前記第一被検出部39aの外周面に前記第二被検出部40aの内周面を近接対向させた状態で、これら第一、第二両被検出部39a、40a同士を互いに同心に配置している。即ち、これら両被検出部39a、40a同士を、同心性を確保しつつ、径方向に重畳配置している。又、トルクの非伝達時の状態、即ち、トーションバー15が弾性的に捩れ変形しておらず、前記両被検出部39a、40aが回転方向に相対変位していない状態で、前記各凸部50、50と前記各舌片51、51との円周方向の位相を、互いに一致させている。
又、本例の場合、図示しないハウジングに支持されたセンサユニット12aは、全体を円環状に構成されたもので、前記第一、第二両被検出部39a、40aの外径側に、これら両被検出部39a、40aと同心に配置されている。この様なセンサユニット12aは、磁性材製のステータ52と、1本の導線53から成る複数のコイル54、54とを備える。このうちのステータ52は、円周方向に関して等ピッチで配置された、それぞれが径方向に長い複数本の芯部55、55と、これら各芯部55、55の基端部である外径側端部同士を連結する円環状のリム部56とを備える。このうちの各芯部55、55の総数は、前記各舌片51、51の総数(前記各凸部50、50の総数)と一致している。又、これら各芯部55、55の先端面である内径側端面の、中心角で表される円周方向幅は、前記各舌片51、51の円周方向幅(前記各凸部50、50の円周方向幅)と等しい。本例の場合には、この様な各芯部55、55の内径側端面を、それぞれ前記第二被検出部40aの外周面に近接対向させている。又、前記各コイル54、54は、それぞれ前記各芯部55、55に巻回されると共に、円周方向に隣り合うもの同士で、巻回方向を互いに逆にしている。この為に、これら各コイル54、54(前記各芯部55、55)の総数を、偶数(図示の例では10個)としている。従って、本例の場合、前記各凸部50、50の総数、及び、前記各舌片51、51の総数も、偶数となる。
上述の様な構成を有する本例のトルク測定装置付回転伝達装置の場合、前記各コイル54、54は、磁場を発生させる駆動用と、磁場変化の検出用との、両方の機能を兼ね備えている。即ち、本例の場合、前記各コイル54、54(前記導線53)に駆動電圧を印加する事により、これら各コイル54、54に駆動電流を流すと、円周方向に隣り合う各コイル54、54同士の間で、それぞれ前記ステータ52及び第一、第二両エンコーダ10a、11aの内部を、図26に太い矢印線で示す様なループ状の磁束が流れる。この状態で、前記回転軸ユニット6と共に前記第一、第二両エンコーダ10a、11aが回転すると、前記各ループ状の磁束の密度が周期的に変化し、これに伴って、前記各コイル54、54に周期的な誘導電流が流れる。この結果、前記センサユニット12aの出力信号である、前記導線53の出力{電圧、電流(前記駆動電圧が交流の場合は、これらの波高値や実効値等)}が、図28の(C)に示す様に、周期的に変化する。ここで、この出力の周波数(及び周期)は、前記回転軸ユニット6の回転速度に見合った値をとる。従って、これら周波数(又は周期)と回転速度との関係を予め調べておけば、この周波数(又は周期)に基づいて、この回転速度を求められる。
更に、本例の場合、トルクの伝達時に、トーションバー15が弾性的に捩れ変形する事に基づいて、前記両エンコーダ10a、11aが回転方向に相対変位すると、図28の(A)→(B)の順に示す様に、前記両被検出部39a、40aを構成する凸部50と舌片51との円周方向の位相がずれる。これに伴い、これら凸部50と舌片51とが径方向に重畳している部分である、前記両エンコーダ10a、11aの内部の磁路の円周方向幅が減少する。この結果、図28の(C)の破線→実線の順に示す様に、前記導線53の出力の大きさが低下する。ここで、前記位相のずれ(前記磁路の円周方向幅の減少量)は、前記トルクが大きくなる程大きくなる。従って、前記出力の大きさは、このトルクが大きくなる程大きく低下する。但し、この出力の大きさは、このトルクによって変化するだけでなく、前記回転速度によっても変化する。即ち、前記各コイル54、54を流れる誘導電流(これら各コイル54、54の誘導起電力)の大きさは、これら各コイル54、54を貫く磁束の変化の割合に比例する。そして、この磁束の変化の割合は、前記回転速度に比例して大きくなる。従って、前記出力の大きさ(振幅)は、前記回転速度に比例して大きくなる。そこで、本例の場合には、前記トルクが前記出力の大きさに与える影響と、前記回転速度がこの出力の大きさに与える影響とを、それぞれ予め調べておく。そして、先ず、上述の様に、前記出力の周波数(又は周期)に基づいて、前記回転速度を求める。そして、この回転速度の影響を受けて変化した、前記出力の大きさを、元の大きさに戻す補正を行う。この様にすれば、この補正後の出力の大きさに基づいて、前記トルクを正確に求められる。
尚、前記導線53に印加する駆動電圧は、直流でも良いが、耐ノイズ性を高める為に、交流とするのが望ましい。
尚、前記導線53に印加する駆動電圧は、直流でも良いが、耐ノイズ性を高める為に、交流とするのが望ましい。
又、本例の場合、前記センサユニット12aは、前記ステータ52と前記各コイル54、54とを組み合わせて成り、磁気検出素子等の精密電子部品を備えていない為、耐熱性や耐振性に優れている。又、本例の場合には、回転速度及びトルクを測定する為に利用する出力が1つである為、測定に際して煩雑な信号処理を行う必要がない。従って、この信号処理を行う演算器として、処理能力が余り高くない、安価なものを使用できる。
その他の構成及び作用は、上述した実施の形態の各例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
その他の構成及び作用は、上述した実施の形態の各例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
尚、本発明を実施する場合には、上述した実施の形態の第9例に於ける、第一、第二両エンコーダの被検出部と、センサユニットを構成する各芯部の先端面との対向方向を、径方向から軸方向に変更した構成を採用する事もできる。即ち、この場合には、第一、第二両エンコーダの被検出部を、互いの径寸法が等しい1対の円輪状の被検出部とすると共に、これら両被検出部を軸方向に重畳配置する。又、前記センサユニットを構成する各芯部を、それぞれ軸方向に長く形成する。そして、これら各芯部の先端面を、前記両被検出部に対し、これら両被検出部の重畳方向である軸方向の片側から対向させる。
[実施の形態の第10例]
図29〜34は、請求項1、3、7に対応する、本発明の実施の形態の第10例を示している。本例の場合、連結軸9の他端部に外嵌固定された第一エンコーダ10bと、出力軸14の他端部に外嵌固定された第二エンコーダ11bとは、それぞれ磁性金属により全体を円環状に造られており、それぞれの外周部に、櫛歯円筒状の被検出部39b(40b)を有する。即ち、これら第一エンコーダ10bを構成する第一被検出部39bと、第二エンコーダ11bを構成する第二被検出部40bとは、それぞれ軸方向に長い複数の舌片51a、51a(51b、51b)を円周方向に関して等ピッチで配置すると共に、これら各舌片51a、51a(51b、51b)の基端部同士を互いに連結して成る。又、前記両被検出部39b、40bの形状及び径寸法は互いに等しいが、配置の向きが軸方向に関して互いに逆になっている。これと共に、前記第一被検出部39bを構成する各舌片51a、51aと、前記第二被検出部40bを構成する各舌片51b、51bとが、円周方向の隙間を介在させた状態で、円周方向に関して1本ずつ交互に配置されている。特に、本例の場合、トルクの非伝達時の状態で、円周方向に隣り合う前記各舌片51a、51b同士の間部分の円周方向幅が、総て等しくなっている。更に、この状態で、これら各間部分の円周方向幅と、前記各舌片51a、51bの周方向幅とが、互いに等しくなっている。この理由は、トルクの非伝達時の状態で、後述するデューティ比εを0.5にする為である。尚、本例の場合、前記被検出部39b(40b)のうち、前記各舌片51a、51a(51b、51b)が、それぞれ請求項7に記載した充実部に相当し、円周方向に隣り合うこれら各舌片51a、51a(51b、51b)同士の間部分が、それぞれ請求項7に記載した除肉部に相当する。
図29〜34は、請求項1、3、7に対応する、本発明の実施の形態の第10例を示している。本例の場合、連結軸9の他端部に外嵌固定された第一エンコーダ10bと、出力軸14の他端部に外嵌固定された第二エンコーダ11bとは、それぞれ磁性金属により全体を円環状に造られており、それぞれの外周部に、櫛歯円筒状の被検出部39b(40b)を有する。即ち、これら第一エンコーダ10bを構成する第一被検出部39bと、第二エンコーダ11bを構成する第二被検出部40bとは、それぞれ軸方向に長い複数の舌片51a、51a(51b、51b)を円周方向に関して等ピッチで配置すると共に、これら各舌片51a、51a(51b、51b)の基端部同士を互いに連結して成る。又、前記両被検出部39b、40bの形状及び径寸法は互いに等しいが、配置の向きが軸方向に関して互いに逆になっている。これと共に、前記第一被検出部39bを構成する各舌片51a、51aと、前記第二被検出部40bを構成する各舌片51b、51bとが、円周方向の隙間を介在させた状態で、円周方向に関して1本ずつ交互に配置されている。特に、本例の場合、トルクの非伝達時の状態で、円周方向に隣り合う前記各舌片51a、51b同士の間部分の円周方向幅が、総て等しくなっている。更に、この状態で、これら各間部分の円周方向幅と、前記各舌片51a、51bの周方向幅とが、互いに等しくなっている。この理由は、トルクの非伝達時の状態で、後述するデューティ比εを0.5にする為である。尚、本例の場合、前記被検出部39b(40b)のうち、前記各舌片51a、51a(51b、51b)が、それぞれ請求項7に記載した充実部に相当し、円周方向に隣り合うこれら各舌片51a、51a(51b、51b)同士の間部分が、それぞれ請求項7に記載した除肉部に相当する。
又、本例の場合、図示しないハウジングに支持されたセンサユニット12bは、合成樹脂製のホルダ41aと、このホルダ41aの先端部に包埋された、1個のセンサ42cとを備えたもので、このセンサ42cの検出部を、前記両被検出部39b、40b(前記各舌片51a、51bが円周方向に交互に配置された部分)の外周面に近接対向させている。このセンサ42cは、前記両被検出部39b、40bの外周面と自身の検出部とが対向する方向(図示の例では径方向)に着磁された永久磁石と、この永久磁石の着磁方向両端面のうちで、前記両被検出部39b、40bの外周面と対向する端面に配置された、ホール素子、ホールIC、MR素子、GMR素子等の磁気検出素子とを備える。
上述の様な構成を有する本例のトルク測定装置付回転伝達装置の場合、前記センサユニット12bを構成するセンサ42cの出力信号は、前記回転軸ユニット6と共に前記第一、第二両エンコーダ10b、11bが回転する事に伴い、周期的に変化する。更に、本例の場合、前記回転軸ユニット6によるトルクの伝達時に、トーションバー15の弾性的な捩れ変形に基づいて、前記第一、第二両エンコーダ10b、11b同士が回転方向に相対変位すると、円周方向に隣り合う前記各舌片51a、51b同士の間部分の円周方向幅が変化する。具体的には、円周方向に関して1つ置きに存在する間部分の円周方向幅が拡がり、残りの間部分の円周方向幅が狭まる。この結果、図33の(A)→(B)の順に示す様に、前記センサ42cの出力信号のデューティ比ε(=時間比B/A)が変化する。ここで、前記各間部分の円周方向幅の拡がり量(狭まり量)は、前記トルクに見合った大きさとなる為、前記デューティ比εも、このトルクに見合った値をとる。従って、図34に示す様な、これらデューティ比εとトルクとの関係を予め調べておけば、このデューティ比εに基づいて、このトルクを求められる。更に、本例の場合、前記センサ42cの出力信号に関する、2パルス周期Aは、前記回転軸ユニット6の回転速度に見合った値をとる。従って、これら2パルス周期Aと回転速度との関係を予め調べておけば、この2パルス周期Aに基づいて、この回転速度を求められる。
又、本例の場合、前記第一、第二両エンコーダ10b、11bの被検出部同士を周方向に関して重畳させている為、これら両被検出部39b、40bを設置する部分の軸方向寸法を短くでき、その分だけ省スペースな構造とする事ができる。又、前記センサユニット12bに組み込む磁気検出素子は、1個で足りる為、このセンサユニット12bのコストを抑えられる。
その他の構成及び作用は、前述した実施の形態の第1〜8例の場合と同様であるから、同等部分に関する説明は省略する。
その他の構成及び作用は、前述した実施の形態の第1〜8例の場合と同様であるから、同等部分に関する説明は省略する。
[実施の形態の第11例]
図35〜37は、請求項1、3、7に対応する、本発明の実施の形態の第11例を示している。本例の場合には、連結軸9の他端部に外嵌固定した第一エンコーダ10cを構成する第一被検出部39cと、出力軸14の他端部に外嵌固定した第二エンコーダ11cを構成する第二被検出部40cとを、それぞれ櫛歯円輪状に形成している。これと共に、これら両被検出部39c、40cの軸方向位置を互いに一致させた状態で、これら両被検出部39c、40cを構成する各舌片51c、51c(51d、51d)同士を、円周方向に関する隙間を介在させた状態で、円周方向に関して交互に配置している。そして、前記各舌片51c、51dを配置した部分の軸方向側面に、センサユニット12bを構成する1個のセンサ42cの検出部を、軸方向に対向させている。
前記両被検出部39c、40cの形状を円輪状に変更すると共に、これら両被検出部39c、40cと前記センサ42cの検出部との対向方向を軸方向に変更した点を除き、その他の部分の構成及び作用は、上述した実施の形態の第10例の場合と同様であるから、同等部分に関する説明は省略する。
図35〜37は、請求項1、3、7に対応する、本発明の実施の形態の第11例を示している。本例の場合には、連結軸9の他端部に外嵌固定した第一エンコーダ10cを構成する第一被検出部39cと、出力軸14の他端部に外嵌固定した第二エンコーダ11cを構成する第二被検出部40cとを、それぞれ櫛歯円輪状に形成している。これと共に、これら両被検出部39c、40cの軸方向位置を互いに一致させた状態で、これら両被検出部39c、40cを構成する各舌片51c、51c(51d、51d)同士を、円周方向に関する隙間を介在させた状態で、円周方向に関して交互に配置している。そして、前記各舌片51c、51dを配置した部分の軸方向側面に、センサユニット12bを構成する1個のセンサ42cの検出部を、軸方向に対向させている。
前記両被検出部39c、40cの形状を円輪状に変更すると共に、これら両被検出部39c、40cと前記センサ42cの検出部との対向方向を軸方向に変更した点を除き、その他の部分の構成及び作用は、上述した実施の形態の第10例の場合と同様であるから、同等部分に関する説明は省略する。
[実施の形態の第12例]
図38〜41は、請求項1、3、8に対応する、本発明の実施の形態の第12例を示している。本例の場合、連結軸9の他端部に支持固定された第一エンコーダ10dは、この連結軸9の他端部に外嵌固定された磁性材製で円環状の芯金35aと、この芯金35aの外周部に存在する円筒部の外周面に固定された円筒状の永久磁石37aとを備える。この永久磁石37aの外周面である、第一被検出部39dには、S極とN極とが、円周方向に関して交互に且つ等ピッチで配置されている。一方、出力軸14の他端部に支持固定された第二エンコーダ11dは、この出力軸14の他端部に外嵌固定された磁性金属板製で円環状の芯金36aと、この芯金36aの外周部に存在する円筒部の内周面に固定された円筒状の永久磁石38aとを備える。この永久磁石38aの内周面である、第二被検出部40dは、前記第一被検出部39dの外径側に、所定の径方向間隔をあけた状態で、この第一被検出部39dと同心に配置されている。即ち、これら第一、第二両被検出部39d、40dは、所定の径方向間隔をあけた状態で、互いに対向している。そして、この第二被検出部40dにも、S極とN極とが、円周方向に関して交互に且つ等ピッチで配置されている。この第二被検出部40dに配置された磁極(S極、N極)の総数と、前記第一被検出部39dに配置された磁極の総数とは、互いに一致している。又、トルクの非伝達時の状態で、これら両被検出部39d、40dは、径方向に関して異極同士が、それぞれの中心同士を一致させた状態で対向する様に配置されている。
図38〜41は、請求項1、3、8に対応する、本発明の実施の形態の第12例を示している。本例の場合、連結軸9の他端部に支持固定された第一エンコーダ10dは、この連結軸9の他端部に外嵌固定された磁性材製で円環状の芯金35aと、この芯金35aの外周部に存在する円筒部の外周面に固定された円筒状の永久磁石37aとを備える。この永久磁石37aの外周面である、第一被検出部39dには、S極とN極とが、円周方向に関して交互に且つ等ピッチで配置されている。一方、出力軸14の他端部に支持固定された第二エンコーダ11dは、この出力軸14の他端部に外嵌固定された磁性金属板製で円環状の芯金36aと、この芯金36aの外周部に存在する円筒部の内周面に固定された円筒状の永久磁石38aとを備える。この永久磁石38aの内周面である、第二被検出部40dは、前記第一被検出部39dの外径側に、所定の径方向間隔をあけた状態で、この第一被検出部39dと同心に配置されている。即ち、これら第一、第二両被検出部39d、40dは、所定の径方向間隔をあけた状態で、互いに対向している。そして、この第二被検出部40dにも、S極とN極とが、円周方向に関して交互に且つ等ピッチで配置されている。この第二被検出部40dに配置された磁極(S極、N極)の総数と、前記第一被検出部39dに配置された磁極の総数とは、互いに一致している。又、トルクの非伝達時の状態で、これら両被検出部39d、40dは、径方向に関して異極同士が、それぞれの中心同士を一致させた状態で対向する様に配置されている。
又、本例の場合、図示しないハウジングに支持されたセンサユニット12cは、合成樹脂製のホルダ41bと、このホルダ41bの先端部に包埋された、1個のセンサ42dとを備えたもので、このセンサ42dが、前記両被検出部39d、40d同士の間の径方向中央位置に配置されている。このセンサ42dの検出部には、ホール素子、ホールIC、MR素子、GMR素子等の磁気検出素子が組み込まれており、この磁気検出素子の感度方向は、この磁気検出素子の中心部に於ける、前記第一、第二両被検出部39d、40dの径方向と一致している。
ここで、上述の様な構成を有する本例のトルク測定装置付回転伝達装置に関して、トルクの非伝達時の状態、即ち、図40の(A)に示す様に、前記両被検出部39d、40d同士が回転方向に相対変位していない状態と、トルクの伝達時の状態、即ち、同図の(B)に示す様に、前記両被検出部39d、40d同士が回転方向に相対変位している状態とを考える。前記磁気検出素子の感度方向は、(A)(B)の上下方向であり、この上下方向の磁束密度と、前記センサユニット12cの出力信号である、前記磁気検出素子の出力(電圧、電流)の大きさとが比例する。トルクの非伝達時の状態では、(A)に示す様に、前記両被検出部39d、40dの異極同士が径方向に対向している為、前記磁気検出素子を通過する磁束の方向は、全体的に、前記感度方向とほぼ一致する。即ち、この状態では、この感度方向の磁束密度が最大になる為、前記磁気検出素子の出力も最大となる。これに対して、トルクの伝達時の状態では、(B)に示す様に、前記両被検出部39d、40dの異極同士の位置関係が円周方向ずれる為、前記磁気検出素子を通過する磁束の方向は、全体的に、この磁気検出素子の感度方向に対して傾斜する。即ち、この状態では、この傾斜の分だけ、この感度方向の磁束密度が低下する為、その分、前記磁気検出素子の出力も低下する。ここで、前記傾斜の大きさは、前記トルク(前記円周方向のずれ)が大きくなる程、大きくなる。従って、前記磁気検出素子の出力は、前記トルクがゼロの時に最大となり、このトルクが大きくなる程小さくなる。
ところで、前記トルクの伝達時に、前記両被検出部39d、40dは、前記回転軸ユニット6と共に回転している。この為、前記磁気検出素子の出力は、例えば図41に示す様に、正弦波状になる。上述した様に、この出力の大きさ(振幅)は、前記トルクが大きくなる程、大きくなる。従って、これら出力の大きさとトルクとの関係を予め調べておけば、この出力の大きさに基づいて、このトルクを求められる。更に、前記出力の周波数(及び周期)は、前記回転軸ユニット6の回転速度に見合った値をとる。従って、これら周波数(又は周期)と回転速度との関係を予め調べておけば、この周波数(又は周期)に基づいて、この回転速度を求められる。
尚、本例を実施する場合には、トルクの非伝達時の状態で、前記両被検出部39d、40d同士の磁極配置を、円周方向に関して電気角で90度ずらす(一方の被検出部の磁極中心と、他方の被検出部の磁極間境界とを、径方向に対向させる)事もできる。この場合には、上述した説明の場合とは逆に、前記磁気検出素子の出力は、トルクの非伝達時の状態で最小となり、伝達するトルクが大きくなる程、大きくなる。
又、本例を実施する場合には、前記センサユニット12cを構成するセンサ42dの検出部として、磁気検出素子を使用する代わりに、コイルを使用する事もできる。コイルを使用する場合には、このコイルの中心軸を、前記第一、第二両被検出部39d、40dの径方向に一致させる。この様な構成を採用する場合、前記回転軸ユニット6と共に前記両被検出部39d、40dが回転すると、前記コイルを貫く磁束の向き及び大きさが周期的に変化する為、前記センサユニット12cの出力信号である、前記コイルの出力(電圧、電流)が周期的に変化する。この出力の周波数(及び周期)は、前記回転速度に見合った値をとる為、この周波数(又は周期)に基づいて、この回転速度を求められる。又、前記コイルを垂直に貫く磁束密度は、トルクの大きさ(前記両被検出部39d、40dの異極同士の円周方向に関する位置ずれ量)に応じて変化する。この為、前記コイルの出力の大きさは、前記トルクの大きさに応じて変化する。但し、前述した実施の形態の第9例のセンサユニット12a(図24〜27参照)の場合と同様、前記コイルの出力の大きさは、前記回転速度によっても変化する。従って、前述した実施の形態の第9例の場合と同様、先ず、上述の様にコイルの出力の周波数(又は周期)に基づいて回転速度を求めた後、この回転速度の影響を受けて変化した、前記出力の大きさを、元の大きさに戻す補正を行う。この様にすれば、この補正後の出力の大きさに基づいて、前記トルクを正確に求められる。
又、本例の場合も、前記センサユニット12cに組み込むセンサ42dは、1個で足りる為、このセンサユニット12cのコストを抑えられる。
その他の構成及び作用は、前述した実施の形態の第1〜8例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
その他の構成及び作用は、前述した実施の形態の第1〜8例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
尚、本発明を実施する場合には、上述した実施の形態の第12例に於ける、第一、第二両エンコーダの被検出部と、センサユニットを構成する1個のセンサの検出部との対向方向を、径方向から軸方向に変更した構成を採用する事もできる。即ち、この場合には、第一、第二両エンコーダの被検出部を、互いの径寸法が等しい1対の円輪状の被検出部とすると共に、これら両被検出部を軸方向に対向させて配置する。そして、これら両被検出部同士の間に、センサユニットを構成する1個のセンサの検出部を配置する。
[実施の形態の第13例]
図42は、請求項1、3、5に対応する、本発明の実施の形態の第13例を示している。本例は、前述の図1〜11に示した実施の形態の第1例の変形例である。即ち、前述した実施の形態の第1例の場合が、第一、第二両エンコーダ10、11及びセンサユニット12を、出力軸14の他端部周辺に集中して配置していたのに対し、本例の場合には、これら第一、第二両エンコーダ10、11及びセンサユニット12を、入力軸13の他端部周辺に集中して配置している。この為に、本例の場合、トーションバー15の内径側に配置した連結軸9aの一端部(図42の左端部)外周面を、出力軸14の他端部内周面に、インボリュートスプライン係合、キー係合等により、相対回転不能に連結している。これと共に、図示しない止め輪等を使用して、前記出力軸14に対する、前記連結軸9aの軸方向変位を阻止している。そして、この状態で、この連結軸9aの他端部(図42の右端部)を、前記入力軸13の他端開口から突出させている。そして、この連結軸9aの他端部に前記第一エンコーダ10を外嵌固定すると共に、前記入力軸13の他端部に前記第二エンコーダ11を外嵌固定している。更に、これら両エンコーダ10、11の被検出部に、前記センサユニット12を構成する1対のセンサの検出部を対向させた状態で、このセンサユニット12を図示しないハウジングに支持している。
尚、図42は略図であり、一部に於いて図示や符号の記入を省略しているが、その他の構成及び作用は、前述した実施の形態の第1例の場合と同様であるから、同等部分に関する説明は省略する。
図42は、請求項1、3、5に対応する、本発明の実施の形態の第13例を示している。本例は、前述の図1〜11に示した実施の形態の第1例の変形例である。即ち、前述した実施の形態の第1例の場合が、第一、第二両エンコーダ10、11及びセンサユニット12を、出力軸14の他端部周辺に集中して配置していたのに対し、本例の場合には、これら第一、第二両エンコーダ10、11及びセンサユニット12を、入力軸13の他端部周辺に集中して配置している。この為に、本例の場合、トーションバー15の内径側に配置した連結軸9aの一端部(図42の左端部)外周面を、出力軸14の他端部内周面に、インボリュートスプライン係合、キー係合等により、相対回転不能に連結している。これと共に、図示しない止め輪等を使用して、前記出力軸14に対する、前記連結軸9aの軸方向変位を阻止している。そして、この状態で、この連結軸9aの他端部(図42の右端部)を、前記入力軸13の他端開口から突出させている。そして、この連結軸9aの他端部に前記第一エンコーダ10を外嵌固定すると共に、前記入力軸13の他端部に前記第二エンコーダ11を外嵌固定している。更に、これら両エンコーダ10、11の被検出部に、前記センサユニット12を構成する1対のセンサの検出部を対向させた状態で、このセンサユニット12を図示しないハウジングに支持している。
尚、図42は略図であり、一部に於いて図示や符号の記入を省略しているが、その他の構成及び作用は、前述した実施の形態の第1例の場合と同様であるから、同等部分に関する説明は省略する。
[実施の形態の第14例]
図43は、請求項1、3、6に対応する、本発明の実施の形態の第14例を示している。本例は、前述の図24〜28に示した実施の形態の第9例に関する、上述した第13例と同様の変形例であり、第一、第二両エンコーダ10a、11a及びセンサユニット12aを、入力軸13の他端部周辺に集中して配置している。
尚、図43は略図であり、一部に於いて図示や符号の記入を省略しているが、その他の構成及び作用は、前述した実施の形態の第9例(連結軸9aに関しては上述した第13例)の場合と同様であるから、同等部分に関する説明は省略する。
図43は、請求項1、3、6に対応する、本発明の実施の形態の第14例を示している。本例は、前述の図24〜28に示した実施の形態の第9例に関する、上述した第13例と同様の変形例であり、第一、第二両エンコーダ10a、11a及びセンサユニット12aを、入力軸13の他端部周辺に集中して配置している。
尚、図43は略図であり、一部に於いて図示や符号の記入を省略しているが、その他の構成及び作用は、前述した実施の形態の第9例(連結軸9aに関しては上述した第13例)の場合と同様であるから、同等部分に関する説明は省略する。
[実施の形態の第15例]
図44は、請求項1、3、7に対応する、本発明の実施の形態の第15例を示している。本例は、前述の図29〜35に示した実施の形態の第10例に関する、前述した第13例と同様の変形例であり、第一、第二両エンコーダ10b、11b及びセンサユニット12bを、入力軸13の他端部周辺に集中して配置している。
尚、図44は略図であり、一部に於いて図示や符号の記入を省略しているが、その他の構成及び作用は、前述した実施の形態の第10例(連結軸9aに関しては前述した第13例)の場合と同様であるから、同等部分に関する説明は省略する。
図44は、請求項1、3、7に対応する、本発明の実施の形態の第15例を示している。本例は、前述の図29〜35に示した実施の形態の第10例に関する、前述した第13例と同様の変形例であり、第一、第二両エンコーダ10b、11b及びセンサユニット12bを、入力軸13の他端部周辺に集中して配置している。
尚、図44は略図であり、一部に於いて図示や符号の記入を省略しているが、その他の構成及び作用は、前述した実施の形態の第10例(連結軸9aに関しては前述した第13例)の場合と同様であるから、同等部分に関する説明は省略する。
[実施の形態の第16例]
図45は、請求項1、3、7に対応する、本発明の実施の形態の第16例を示している。本例は、前述の図35〜37に示した実施の形態の第11例に関する、前述した第13例と同様の変形例であり、第一、第二両エンコーダ10c、11c及びセンサユニット12bを、入力軸13の他端部周辺に集中している。
尚、図45は略図であり、一部に於いて図示や符号の記入を省略しているが、その他の構成及び作用は、前述した実施の形態の第11例(連結軸9aに関しては前述した第13例)の場合と同様であるから、同等部分に関する説明は省略する。
図45は、請求項1、3、7に対応する、本発明の実施の形態の第16例を示している。本例は、前述の図35〜37に示した実施の形態の第11例に関する、前述した第13例と同様の変形例であり、第一、第二両エンコーダ10c、11c及びセンサユニット12bを、入力軸13の他端部周辺に集中している。
尚、図45は略図であり、一部に於いて図示や符号の記入を省略しているが、その他の構成及び作用は、前述した実施の形態の第11例(連結軸9aに関しては前述した第13例)の場合と同様であるから、同等部分に関する説明は省略する。
[実施の形態の第17例]
図46は、請求項1、3、8に対応する、本発明の実施の形態の第17例を示している。本例は、前述の図38〜41に示した実施の形態の第12例に関する、前述した第13例と同様の変形例であり、第一、第二両エンコーダ10d、11d及びセンサユニット12cを、入力軸13の他端部周辺に集中して配置している。
尚、図46は略図であり、一部に於いて図示や符号の記入を省略しているが、その他の構成及び作用は、前述した実施の形態の第12例(連結軸9aに関しては前述した第13例)の場合と同様であるから、同等部分に関する説明は省略する。
図46は、請求項1、3、8に対応する、本発明の実施の形態の第17例を示している。本例は、前述の図38〜41に示した実施の形態の第12例に関する、前述した第13例と同様の変形例であり、第一、第二両エンコーダ10d、11d及びセンサユニット12cを、入力軸13の他端部周辺に集中して配置している。
尚、図46は略図であり、一部に於いて図示や符号の記入を省略しているが、その他の構成及び作用は、前述した実施の形態の第12例(連結軸9aに関しては前述した第13例)の場合と同様であるから、同等部分に関する説明は省略する。
[実施の形態の第18例]
図47〜50は、請求項2、3、5に対応する、本発明の実施の形態の第18例を示している。上述した実施の形態の各例の場合が、第一、第二両エンコーダ及びセンサユニットを、回転軸ユニットの何れか一方の端部側に集中して配置していたのに対し、本例の場合には、第一、第二両エンコーダ10e、11e及びセンサユニット12dを、回転軸ユニット6aの中間部で、軸方向に関して入力歯車7と出力歯車8との間に挟まれた部分に集中して配置している。
図47〜50は、請求項2、3、5に対応する、本発明の実施の形態の第18例を示している。上述した実施の形態の各例の場合が、第一、第二両エンコーダ及びセンサユニットを、回転軸ユニットの何れか一方の端部側に集中して配置していたのに対し、本例の場合には、第一、第二両エンコーダ10e、11e及びセンサユニット12dを、回転軸ユニット6aの中間部で、軸方向に関して入力歯車7と出力歯車8との間に挟まれた部分に集中して配置している。
この為に本例の場合、前記第一エンコーダ10eは、前記入力歯車7の片側面の内周寄り部分に一体形成されたパーキングロック用歯車28の先端面(図47、50の左端面)に、一体形成されている。即ち、前記第一エンコーダ10eは、それぞれが前記パーキングロック用歯車28の先端面から軸方向に突出する状態で一体形成された、磁性金属製である複数の凸部50a、50aを、円周方向に関して等ピッチで配置して成る。この第一エンコーダ10eは、その全体を第一被検出部39eとしている。尚、この様な第一エンコーダ10eは、前記入力歯車7及びパーキングロック用歯車28を介して、入力軸13に固定された状態になっている。又、前記第二エンコーダ11eは、出力軸14の外周面の一端寄り部分で、前記出力歯車8に対し軸方向に隣接する部分に、一体形成されている。即ち、この第二エンコーダ11eは、それぞれが前記出力軸14の外周面の一端寄り部分から径方向に突出する状態で一体形成された、磁性金属製である複数の凸部50b、50bを、円周方向に関して等ピッチで配置して成る。この第二エンコーダ11eも、その全体を第二被検出部40eとしている。又、本例の場合、前記第一、第二両エンコーダ10e、11eは、互いの外径寸法が等しく、互いに同心に、且つ、軸方向に隣り合う状態で近接配置されている。又、前記各凸部50a、50aの総数と、前記各凸部50b、50bの総数とは、互いに一致している。又、前記各凸部50a、50aの円周方向幅と、前記各凸部50b、50bの円周方向幅とは、互いに等しい。更に、トルクの非伝達時の状態で、前記各凸部50a、50aと、前記各凸部50b、50bとの、円周方向に関する位相を一致させている。
又、前記センサユニット12dは、合成樹脂製のホルダ41cと、このホルダ41cの先端部に包埋された、第一、第二両センサ42e、42fとを備える。この様なセンサユニット12dは、このうちの第一センサ42eの検出部を前記第一エンコーダ10eの外周面(第一被検出部39e)に、前記第二センサ42fの検出部を前記第二エンコーダ11eの外周面(第二被検出部40e)に、それぞれ近接対向させた状態で、図示しないハウジングに支持されている。前記両センサ42e、42fは、それぞれ前記両エンコーダ10e、11eの外周面と自身の検出部とが対向する方向に着磁された永久磁石と、この永久磁石の着磁方向両端面のうちで、前記両エンコーダ10e、11eの外周面と対向する端面に配置された、ホール素子、ホールIC、MR素子、GMR素子等の磁気検出素子とを備える。前記両センサ42e、42fを構成する永久磁石は、1個のものを共用する事もできる。
又、本例の場合、トーションバー15aの内径側には、連結軸が設けられていない。このトーションバー15aの径方向中心部には、一端面にのみ開口した油導入路43aが設けられている。本例の場合には、この油導入路43aの端部開口を通じて、この油導入路43a内に導入した潤滑油を、前記回転軸ユニット6aの両端寄り部分に設けた1対の油路44a、44b内に供給する様にしている。
上述の様に構成する本例のトルク測定装置付回転伝達装置の場合も、前述の図1〜11に示した実施の形態の第1例の場合と同様、前記センサユニット12dを構成する第一、第二両センサ42e、42fの出力信号の周波数(及び周期)は、前記回転軸ユニット6aの回転速度に見合った値をとる。従って、この周波数(又は周期)に基づいて、前記回転速度を求められる。又、前記第一、第二両センサ42e、42fの出力信号同士の間の位相差比(=位相差/1周期)は、前記回転軸ユニット6aにより前記入力歯車7と前記出力歯車8との間で伝達されるトルクに見合った値をとる。従って、前記位相差比に基づいて、このトルクを求められる。
その他の構成及び作用は、前述した実施の形態の第1例の場合と同様であるから、同等部分に関する説明は省略する。
その他の構成及び作用は、前述した実施の形態の第1例の場合と同様であるから、同等部分に関する説明は省略する。
尚、本発明を実施する場合で、上述した実施の形態の第18例の様に、第一、第二両エンコーダ及びセンサユニットを、回転軸ユニットの中間部で、軸方向に関して入力歯車と出力歯車との間に挟まれた部分に集中して配置する構成を採用する場合には、前記第一、第二両エンコーダ及びセンサユニットの構成として、請求項6〜8に記載した発明の構成(例えば、前述した実施の形態の第9〜12例の構成)を採用する事もできる。
又、本発明は、上述した実施の形態の第13〜18例の構造に、前述した実施の形態の第2〜8例の構造の特徴部分を適用して実施する事もできる。
[実施の形態の第19例、及び、第20例]
本発明を実施する場合、入力軸13と出力軸14との一端部同士の組み合わせ部の構造に関しては、図51に示した実施の形態の第19例の構造、又は、図52に示した実施の形態の第20例の構造を採用する事もできる。
このうちの図51に示した実施の形態の第19例の構造の場合には、当該組み合わせ部に設置するラジアル軸受及びスラスト軸受のうちのラジアル軸受を、ラジアル滑り軸受である、円筒状のスリーブベアリング57としている。これに対し、前記スラスト軸受を、スラストニードル軸受58としている。このスラストニードル軸受58は、入力側組み合わせ用筒部16の基端部に径方向の大きながたつきなく外嵌される事で、径方向の位置決めを図られている。
これに対し、図52に示した実施の形態の第20例の構造の場合には、当該組み合わせ部に設置するラジアル軸受及びスラスト軸受を、円筒状のスリーブベアリング57及び円輪状のスラストワッシャ21cとしている。このうちのスラストワッシャ21cは、入力側組み合わせ用筒部16の基端部に径方向の大きながたつきなく外嵌される事で、径方向の位置決めを図られている。これと共に、前記スラストワッシャ21cは、段差面19に植設されたピン59を、自身の一部に形成した係合孔60に係合させる事で、円周方向の位置決めを図られている。
又、上述の図51及び図52に示した実施の形態の第19例及び第20例の構造の場合には、何れも、前記入力側組み合わせ用筒部16の基端部に油路61を形成している。そして、この油路61を通じて、円筒状空間47から、前記ラジアル軸受を設置した空間と前記スラスト軸受を設置した空間との間部分に、潤滑油を供給できる様にしている。これにより、前記両軸受の潤滑性能を向上させている。
その他の構成及び作用は、上述した実施の形態の各例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
本発明を実施する場合、入力軸13と出力軸14との一端部同士の組み合わせ部の構造に関しては、図51に示した実施の形態の第19例の構造、又は、図52に示した実施の形態の第20例の構造を採用する事もできる。
このうちの図51に示した実施の形態の第19例の構造の場合には、当該組み合わせ部に設置するラジアル軸受及びスラスト軸受のうちのラジアル軸受を、ラジアル滑り軸受である、円筒状のスリーブベアリング57としている。これに対し、前記スラスト軸受を、スラストニードル軸受58としている。このスラストニードル軸受58は、入力側組み合わせ用筒部16の基端部に径方向の大きながたつきなく外嵌される事で、径方向の位置決めを図られている。
これに対し、図52に示した実施の形態の第20例の構造の場合には、当該組み合わせ部に設置するラジアル軸受及びスラスト軸受を、円筒状のスリーブベアリング57及び円輪状のスラストワッシャ21cとしている。このうちのスラストワッシャ21cは、入力側組み合わせ用筒部16の基端部に径方向の大きながたつきなく外嵌される事で、径方向の位置決めを図られている。これと共に、前記スラストワッシャ21cは、段差面19に植設されたピン59を、自身の一部に形成した係合孔60に係合させる事で、円周方向の位置決めを図られている。
又、上述の図51及び図52に示した実施の形態の第19例及び第20例の構造の場合には、何れも、前記入力側組み合わせ用筒部16の基端部に油路61を形成している。そして、この油路61を通じて、円筒状空間47から、前記ラジアル軸受を設置した空間と前記スラスト軸受を設置した空間との間部分に、潤滑油を供給できる様にしている。これにより、前記両軸受の潤滑性能を向上させている。
その他の構成及び作用は、上述した実施の形態の各例の場合と同様であるから、同等部分に関する図示並びに説明は省略する。
本発明を組み込んで使用する変速機の形式は、カウンタ軸及びカウンタギヤを持つ構成であれば、特に限定されず、オートマチックトランスミッション(AT)、無段変速機(CVT)、マニュアルトランスミッション(MT)等の各種形式を採用できる。又、測定した回転速度及びトルクは、変速制御以外の車両制御を行う為に利用しても良い。又、前記変速機の上流側に置かれる原動機は、必ずしもガソリンエンジンやディーゼルエンジン等の内燃機関である必要はなく、例えばハイブリッド車や電気自動車に用いられる電動モータであっても良い。
更に、本発明を実施する場合に、トルクを測定する事は必須であるが、コイルに電圧を惹起させる(誘導起電力を利用する)一部の構造を除き、回転速度を測定する事は必須ではない。回転速度が必要であっても、別途簡易な構造により測定する事もできる。
更に、本発明を実施する場合に、トルクを測定する事は必須であるが、コイルに電圧を惹起させる(誘導起電力を利用する)一部の構造を除き、回転速度を測定する事は必須ではない。回転速度が必要であっても、別途簡易な構造により測定する事もできる。
1 回転軸
2、2a エンコーダ
3 センサ
4 ハーネス
5 センサユニット
6、6a、6b 回転軸ユニット
7 入力歯車
8 出力歯車
9、9a、9b 連結軸
10、10a〜10h 第一エンコーダ
11、11a〜11h 第二エンコーダ
12、12a〜12d センサユニット
13、13a、13b 入力軸
14、14a 出力軸
15、15a トーションバー
16 入力側組み合わせ用筒部
17 出力側組み合わせ用筒部
18 ラジアルニードル軸受
19 段差面
20 先端面
21、21a〜21c スラストワッシャ
22 スリット
23 補強用円筒部
24a〜24e、24a1、24b1 インボリュートスプライン係合部
25a〜25d 止め輪
26a、26b 円筒面嵌合部
27 段差面
28 パーキングロック用歯車
29a〜29d 円すいころ軸受
30a〜30d 内輪
31 間座
32a、32b ナット
33 段差面
34 鍔部
35、35a、35b 芯金
36、36a、36b 芯金
37、37a〜37c 永久磁石
38、38a〜38c 永久磁石
39、39a〜39e 第一被検出部
40、40a〜40e 第二被検出部
41、41a〜41c ホルダ
42a〜42f (第一、第二)センサ
43、43a 油導入路
44a、44b 油路
45a、45b 環状空間
46a、46b 油溝
47 円筒状空間
48 先端面
49 段差面
50、50a、50b 凸部
51、51a〜51d 舌片
52 ステータ
53 導線
54 コイル
55 芯部
56 リム部
57 スリーブベアリング
58 スラストニードル軸受
59 ピン
60 係合孔
61 油路
62、62a 第一雄インボリュートスプライン部
63、63a 第一雌インボリュートスプライン部
64、64a 第二雄インボリュートスプライン部
65、65a 第二雌インボリュートスプライン部
66a、66b 凹溝
67a、67b 通孔
68 凹孔
69 ピン
70a、70b 凹部
71 凸部
72a、72b 目印部
73a、73b 目印部
74 第一メッキ層
75 第二メッキ層
76 円筒面
77 円筒面
2、2a エンコーダ
3 センサ
4 ハーネス
5 センサユニット
6、6a、6b 回転軸ユニット
7 入力歯車
8 出力歯車
9、9a、9b 連結軸
10、10a〜10h 第一エンコーダ
11、11a〜11h 第二エンコーダ
12、12a〜12d センサユニット
13、13a、13b 入力軸
14、14a 出力軸
15、15a トーションバー
16 入力側組み合わせ用筒部
17 出力側組み合わせ用筒部
18 ラジアルニードル軸受
19 段差面
20 先端面
21、21a〜21c スラストワッシャ
22 スリット
23 補強用円筒部
24a〜24e、24a1、24b1 インボリュートスプライン係合部
25a〜25d 止め輪
26a、26b 円筒面嵌合部
27 段差面
28 パーキングロック用歯車
29a〜29d 円すいころ軸受
30a〜30d 内輪
31 間座
32a、32b ナット
33 段差面
34 鍔部
35、35a、35b 芯金
36、36a、36b 芯金
37、37a〜37c 永久磁石
38、38a〜38c 永久磁石
39、39a〜39e 第一被検出部
40、40a〜40e 第二被検出部
41、41a〜41c ホルダ
42a〜42f (第一、第二)センサ
43、43a 油導入路
44a、44b 油路
45a、45b 環状空間
46a、46b 油溝
47 円筒状空間
48 先端面
49 段差面
50、50a、50b 凸部
51、51a〜51d 舌片
52 ステータ
53 導線
54 コイル
55 芯部
56 リム部
57 スリーブベアリング
58 スラストニードル軸受
59 ピン
60 係合孔
61 油路
62、62a 第一雄インボリュートスプライン部
63、63a 第一雌インボリュートスプライン部
64、64a 第二雄インボリュートスプライン部
65、65a 第二雌インボリュートスプライン部
66a、66b 凹溝
67a、67b 通孔
68 凹孔
69 ピン
70a、70b 凹部
71 凸部
72a、72b 目印部
73a、73b 目印部
74 第一メッキ層
75 第二メッキ層
76 円筒面
77 円筒面
Claims (8)
- ハウジングと、回転軸ユニットと、第一歯車と、第二歯車と、連結軸と、第一エンコーダと、第二エンコーダと、1個のセンサユニットとを備え、
このうちの回転軸ユニットは、それぞれが中空状の第一、第二両回転軸と、中空状のトーションバーとを備えたもので、このうちの第一、第二両回転軸は、互いに同心に配置されると共に、互いの一端部同士を相対回転可能に組み合わされた状態で、前記ハウジングに回転自在に支持されており、前記トーションバーは、前記第一、第二両回転軸の内径側に、これら第一、第二両回転軸と同心に配置されると共に、一端部をこの第一回転軸に、他端部をこの第二回転軸に、それぞれ相対回転不能に連結されており、
前記第一歯車は、前記第一回転軸の外周面の軸方向中間部に固定されており、
前記第二歯車は、前記第二回転軸の外周面の軸方向中間部に固定されており、
前記連結軸は、前記トーションバーの内径側に、このトーションバーと同心に配置されると共に、一端部を前記第一、第二両回転軸のうちの何れか一方の回転軸に相対回転不能に連結された状態で、他端部を他方の回転軸及び前記トーションバーの端部から軸方向に突出させており、
前記第一エンコーダは、前記連結軸の他端部に固定された状態で、この連結軸と同心で円環状の第一被検出部を有すると共に、この第一被検出部の磁気特性を円周方向に関して交互に且つ等ピッチで変化させており、
前記第二エンコーダは、前記他方の回転軸の他端部に固定された状態で、この他方の回転軸と同心で円環状の第二被検出部を有すると共に、この第二被検出部の磁気特性を円周方向に関して交互に且つ等ピッチで変化させており、
前記第一、第二両被検出部は、互いに近接配置されており、
前記センサユニットは、その一部を前記第一、第二両被検出部に対向させた状態で、前記ハウジングに支持されており、且つ、前記第一、第二両被検出部のうちで自身が対向している部分の磁気特性変化に対応して出力信号を変化させるものである
トルク測定装置付回転伝達装置。 - ハウジングと、回転軸ユニットと、第一歯車と、第二歯車と、第一エンコーダと、第二エンコーダと、1個のセンサユニットとを備え、
このうちの回転軸ユニットは、それぞれが中空状の第一、第二両回転軸と、トーションバーとを備えたもので、このうちの第一、第二両回転軸は、互いに同心に配置されると共に、互いの一端部同士を相対回転可能に組み合わされた状態で、前記ハウジングに回転自在に支持されており、前記トーションバーは、前記第一、第二両回転軸の内径側に、これら第一、第二両回転軸と同心に配置されると共に、一端部をこの第一回転軸に、他端部をこの第二回転軸に、それぞれ相対回転不能に連結されており、
前記第一歯車は、前記第一回転軸の外周面の軸方向中間部に固定されており、
前記第二歯車は、前記第二回転軸の外周面の軸方向中間部に固定されており、
前記第一エンコーダは、軸方向に関して前記第一、第二両歯車同士の間に挟まれた位置に配置されると共に、前記第一回転軸に対して固定されたもので、この第一回転軸と同心で円環状の第一被検出部を有すると共に、この第一被検出部の磁気特性を円周方向に関して交互に且つ等ピッチで変化させており、
前記第二エンコーダは、軸方向に関して前記第一、第二両歯車同士の間に挟まれた位置に配置されると共に、前記第二回転軸に対して固定されたもので、この第二回転軸と同心で円環状の第二被検出部を有すると共に、この第二被検出部の磁気特性を円周方向に関して交互に且つ等ピッチで変化させており、
前記第一、第二両被検出部は、互いに近接配置されており、
前記センサユニットは、その一部を前記第一、第二両被検出部に対向させた状態で、前記ハウジングに支持されており、且つ、前記第一、第二両被検出部のうちで自身が対向している部分の磁気特性変化に対応して出力信号を変化させるものである
トルク測定装置付回転伝達装置。 - 前記トーションバーの軸方向中間部で、トルクを伝達する際に弾性的に捩れ変形する部分の軸方向寸法が、前記両歯車同士の軸方向間隔よりも大きくなっている、請求項1〜2のうちの何れか1項に記載したトルク測定装置付回転伝達装置。
- 前記回転軸ユニットが前記ハウジングに対し、複数の転がり軸受により回転自在に支持されていると共に、これら各転がり軸受のうちの少なくと1つの転がり軸受を構成する内輪が、前記第一回転軸又は前記第二回転軸と一体に造られている、請求項1〜3のうちの何れか1項に記載したトルク測定装置付回転伝達装置。
- 前記センサユニットは、前記第一被検出部に対向させた第一センサと、前記第二被検出部に対向させた第二センサとを備えたもので、これら第一、第二両センサは、それぞれ前記第一、第二両被検出部のうちで自身が対向している部分の磁気特性変化に対応して変化する出力信号を発生させるものである、
請求項1〜4のうちの何れか1項に記載したトルク測定装置付回転伝達装置。 - 前記第一、第二両エンコーダは、それぞれ磁性材製であり、前記第一、第二両被検出部は、それぞれ除肉部と充実部とを円周方向に関して交互に且つ等ピッチで配置したものであり、これら両被検出部は、互いに近接した状態で径方向又は軸方向に重畳配置されており、
前記センサユニットは、磁性材製のステータと、1本の導線から成る複数のコイルとを備えると共に、この導線に駆動電圧を印加した状態での、この導線の出力電流又は出力電圧を出力信号として使用するものであって、前記ステータは、それぞれが前記両被検出部の重畳方向に長く、それぞれの先端面をこれら両被検出部に対してこれら両被検出部の重畳方向片側から対向させた状態で、円周方向に関して等ピッチで配置された複数の芯部と、これら各芯部の基端部同士を連結する円環状のリム部と備えたものであり、前記各コイルは、前記各芯部に1つずつ外嵌されると共に、円周方向に隣り合うコイル同士で巻回方向が互いに逆になっている、
請求項1〜4のうちの何れか1項に記載したトルク測定装置付回転伝達装置。 - 前記第一、第二両エンコーダは、それぞれ磁性材製であり、前記第一、第二両被検出部は、それぞれ除肉部と充実部とを円周方向に関して交互に且つ等ピッチで配置したものであり、これら第一被検出部を構成する充実部と第二被検出部を構成する充実部とは、円周方向の隙間を介在させた状態で円周方向に関して交互に配置されており、
前記センサユニットは、前記両被検出部の充実部が交互に配置された部分に対向させた1個のセンサを備えたもので、このセンサは、前記両被検出部の充実部が交互に配置された部分のうちで自身が対向している部分の磁気特性変化に対応して変化する出力信号を発生させるものである、
請求項1〜4のうちの何れか1項に記載したトルク測定装置付回転伝達装置。 - 前記第一、第二両被検出部は、径方向に関して互いに対向した1対の円筒面、又は、軸方向に関して互いに対向した1対の円輪面であって、それぞれS極とN極とを円周方向に関して交互に且つ等ピッチで配置したものであり、
前記センサユニットは、前記両被検出部同士の間に配置された磁気検出素子又はコイルを備えたものであり、この磁気検出素子の出力電圧若しくは出力電流又は前記コイルの出力電圧若しくは出力電流を出力信号として使用するものである、
請求項1〜4のうちの何れか1項に記載したトルク測定装置付回転伝達装置。
Priority Applications (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013229952A JP2015090313A (ja) | 2013-11-06 | 2013-11-06 | トルク測定装置付回転伝達装置 |
| US14/901,063 US20160195183A1 (en) | 2013-06-25 | 2013-11-08 | Rotation transmission device |
| EP17204705.2A EP3309419B1 (en) | 2013-06-25 | 2013-11-08 | Rotation transmission device |
| PCT/JP2013/080358 WO2014207953A1 (ja) | 2013-06-25 | 2013-11-08 | 回転伝達装置 |
| EP13887625.5A EP3015836A4 (en) | 2013-06-25 | 2013-11-08 | Rotation transmission device |
| US14/916,668 US9625332B2 (en) | 2013-09-04 | 2014-09-03 | Torque measurement device-equipped rotation transmission apparatus |
| PCT/JP2014/073245 WO2015033976A1 (ja) | 2013-09-04 | 2014-09-03 | トルク測定装置付回転伝達装置 |
| EP14842927.7A EP3043162B1 (en) | 2013-09-04 | 2014-09-03 | Torque measurement device-equipped rotation transmission apparatus |
| US15/436,996 US10480635B2 (en) | 2013-06-25 | 2017-02-20 | Rotation transmission device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013229952A JP2015090313A (ja) | 2013-11-06 | 2013-11-06 | トルク測定装置付回転伝達装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015090313A true JP2015090313A (ja) | 2015-05-11 |
Family
ID=53193899
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013229952A Pending JP2015090313A (ja) | 2013-06-25 | 2013-11-06 | トルク測定装置付回転伝達装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015090313A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110261024A (zh) * | 2019-07-08 | 2019-09-20 | 横店集团英洛华电气有限公司 | 丝杆上打滑机构扭力检测装置 |
| CN111482950A (zh) * | 2019-01-29 | 2020-08-04 | 发那科株式会社 | 机器人 |
-
2013
- 2013-11-06 JP JP2013229952A patent/JP2015090313A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111482950A (zh) * | 2019-01-29 | 2020-08-04 | 发那科株式会社 | 机器人 |
| CN110261024A (zh) * | 2019-07-08 | 2019-09-20 | 横店集团英洛华电气有限公司 | 丝杆上打滑机构扭力检测装置 |
| CN110261024B (zh) * | 2019-07-08 | 2023-12-22 | 浙江联宜电机有限公司 | 丝杆上打滑机构扭力检测装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6083333B2 (ja) | トルク測定装置付回転伝達装置 | |
| US10480635B2 (en) | Rotation transmission device | |
| JP5382465B2 (ja) | 電動パワーステアリング装置 | |
| US20170254710A1 (en) | Torque sensor device | |
| JP2014055910A (ja) | トルクセンサ及びこれを用いたパワーステアリング装置 | |
| EP2832626A1 (en) | Electric power steering device | |
| US9625332B2 (en) | Torque measurement device-equipped rotation transmission apparatus | |
| JP2015172563A (ja) | トルク測定装置付回転伝達装置 | |
| JP4218561B2 (ja) | リング保持装置およびその製造方法 | |
| JP6554938B2 (ja) | トルク測定装置付回転伝達装置 | |
| JP2015090313A (ja) | トルク測定装置付回転伝達装置 | |
| JP6375767B2 (ja) | トルク測定装置付回転伝達装置 | |
| JP6500649B2 (ja) | トルク測定装置付回転伝達装置 | |
| JP2007278963A (ja) | 回転角度およびトルク検出装置 | |
| JP6550965B2 (ja) | トルク測定装置付回転伝達装置 | |
| JP6075270B2 (ja) | トルク測定装置付回転伝達装置 | |
| JP6075269B2 (ja) | トルク測定装置付回転伝達装置 | |
| JP6179350B2 (ja) | トルク測定装置付回転伝達装置 | |
| JP2015090340A (ja) | トルク測定装置付回転伝達装置 | |
| WO2015033976A1 (ja) | トルク測定装置付回転伝達装置 | |
| JP2017166945A (ja) | トルク測定装置付回転伝達装置 | |
| JP2011013134A (ja) | トルクセンサ | |
| JP7040691B1 (ja) | トルク測定装置 | |
| JP6075266B2 (ja) | トルク測定装置付回転伝達装置 | |
| JP6221992B2 (ja) | トルク測定装置付回転伝達装置 |