JP2006090958A - センサ装置およびセンサ付き転がり軸受ユニット - Google Patents
センサ装置およびセンサ付き転がり軸受ユニット Download PDFInfo
- Publication number
- JP2006090958A JP2006090958A JP2004279611A JP2004279611A JP2006090958A JP 2006090958 A JP2006090958 A JP 2006090958A JP 2004279611 A JP2004279611 A JP 2004279611A JP 2004279611 A JP2004279611 A JP 2004279611A JP 2006090958 A JP2006090958 A JP 2006090958A
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- magnetostrictive
- detected
- surface layer
- rolling bearing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images

Landscapes
- Rolling Contact Bearings (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
【課題】 被検出部側に所要の処理を施すことで、磁歪センサの適正状態の設置を可能にし、磁歪センサの取付け位置が制約される場合であっても、逆磁歪効果を適正に検出できるセンサ装置およびセンサ付き転がり軸受ユニットを提供する。
【解決手段】 センサ装置2は、固定側軌道部材3の逆磁歪効果を検知する磁歪センサ10を有している。被検知部とされている固定側軌道部材3の外径に、ニッケル合金製リング11からなる負の磁歪特性を有する表層部が形成されており、磁歪センサ10のセンシング面は、ニッケル合金製リング11の最下部に軸方向内方から臨まされている。
【選択図】 図1
【解決手段】 センサ装置2は、固定側軌道部材3の逆磁歪効果を検知する磁歪センサ10を有している。被検知部とされている固定側軌道部材3の外径に、ニッケル合金製リング11からなる負の磁歪特性を有する表層部が形成されており、磁歪センサ10のセンシング面は、ニッケル合金製リング11の最下部に軸方向内方から臨まされている。
【選択図】 図1
Description
この発明は、逆磁歪効果を利用したセンサ装置、および、転がり軸受とその各種情報を検出するセンサ装置とが一体化されたセンサ付き転がり軸受ユニットに関する。
自動車においては、その制御を行うために種々の情報が必要であることから、車体側に固定される車体側軌道部材、車輪が取り付けられる車輪側軌道部材、および両部材の間に配置された二列の転動体を有するハブユニットに、センサ装置を設けることが提案されている。例えば、特許文献1には、車体側軌道部材の内端面に環状の支持部材を取り付け、この環状支持部材に歪みセンサを貼り付けたセンサ付きハブユニットが開示されている。
近年、自動車の制御手段として、ABS制御(アンチロックブレーキシステム)に加えて、発進時や加速時に駆動輪をスピンさせない駆動力制御やコーナリング時の横滑りを抑制するブレーキ力制御などが実施されているが、より精度のよい制御を行うために、これらの制御に有効に使用できるデータの検出が重要となっている。このような実情に鑑み、本発明者らは、タイヤ(車輪)にかかる接地荷重を精度よく測定して、車両制御の向上を図るという課題を創出した。
これに対し、特許文献1のセンサ付きハブユニットでは、環状支持部材の歪みを測定するものであるので、この歪みから接地荷重を求める場合に、誤差が大きくなり、歪みセンサの測定値から精度よく接地荷重を得ることができないという問題があった。そこで、本発明者は、磁歪センサを利用して接地荷重を精度よく求めることを提案した(特許文献2)。
特開平3−209016号公報
特願2003−23378
上記特許文献2のセンサ付きハブユニットによると、磁歪センサを取り付ける位置およびそのセンシング面の方向が適切であることが必要となるが、適切な歪みを生じる箇所が分かった場合であっても、車体の各部材とハブユニットとの干渉を避けたり取付け箇所の強度を確保する必要性から、磁歪センサを適正状態に設置することが難しいという問題があった。
この発明の目的は、被検知部に所要の処理を施すことで、磁歪センサの適正状態での設置を可能にし、磁歪センサの取付け位置が制約される場合であっても、逆磁歪効果を適正に検出できるセンサ装置およびセンサ付き転がり軸受ユニットを提供することにある。
この発明によるセンサ装置は、圧縮歪みまたは引張り歪みを受ける被検知部と、被検知部の逆磁歪効果を検知する磁歪センサとを備えており、被検知部に、磁歪特性が負の材料からなる表層部が設けられていることを特徴とするものである。
磁歪センサは、逆磁歪効果(物質が歪むあるいは変形すると磁力が現れる現象)を計測するセンサであり、磁歪センサとしては、例えば、透磁率の高い磁性線に高周波電流を印加したときの磁性線両端間のインピーダンスが外部磁場によって変化する電磁気現象を利用して外部磁場を計測する磁気インピーダンスセンサ(MIセンサ)などが挙げられる。
磁歪特性が負の材料としては、Fe−Ni、Fe−Cr−Niなどのニッケル鋼やニッケル合金が例示される。
表層部は、被検知部の本体部分と同じ材料であってもよく、異なる材料であってもよい。前者の場合、被検知部およびその表層部は、例えば、Fe−NiやFe−Cr−Ni鋼を浸炭したものとされる。後者の場合、被検知部は、例えば、軸受鋼などの正の磁歪特性を有する鋼とされ、表層部は、ニッケル鋼製またはニッケル合金製のリング状とされて、被検知部の本体部分に圧入などにより固定されることがあり、また、ニッケル合金を被検知部の本体部分にメッキまたはその他の方法(イオンプレーティング法、スパッタリング法など)により溶射・接合することで表層部を形成するようにしてもよい。
被検知部が正の磁歪定数を有している材料(軸受鋼など)の場合、引張り歪みに対しては、同じ方向に磁化が変化し、圧縮歪みに対しては、その垂直の方向に磁化が変化するので、磁歪センサ(例えばMIセンサ)の検知方向(センシング面が臨まされる方向)は、引張り歪みに対しては、歪み方向と同じ方向とし、圧縮歪みに対しては、歪み方向に対して垂直な方向とすることが適正となる。これとは逆に、被検知部が負の磁歪定数を有している材料(ニッケル鋼など)の場合には、磁歪センサの検知方向は、圧縮歪みに対しては、歪み方向と同じ方向、引張り歪みに対しては、歪み方向に対して垂直な方向とすることが適正である。被検知部が正の磁歪定数を有している材料(軸受鋼など)の場合に、磁歪センサの取付け箇所に制約があり、磁歪センサが適正配置とは逆(引張り歪みに対して歪み方向と垂直な方向または圧縮歪みに対して歪み方向と同じ方向)の位置に設置することが好ましい場合、被検知部の表層部を磁歪特性が負の材料で形成することにより、磁歪センサの検知方向と歪みの方向とを適正な関係とすることができる。
センサ装置は、被検知部の圧縮歪みが測定されるものであり、磁歪センサのセンシング面は、圧縮歪みの方向と同じ方向から被検知部表層部を臨むように設けられていることがあり、また、センサ装置は、被検知部の引張り歪みが測定されるものであり、磁歪センサのセンシング面は、引張り歪みの方向に垂直な方向から被検知部表層部を臨むように設けられていることがある。
この発明のセンサ装置は、被検知部が移動(例えば回転)しており、その被検知部が受けている応力を非接触で測定する場合に特に有効である。
この発明によるセンサ付き転がり軸受ユニットは、固定側軌道部材、回転側軌道部材および転動部材を有する転がり軸受と、センサ装置とを備えているセンサ付き転がり軸受ユニットにおいて、センサ装置は、被検知部の逆磁歪効果を検知する磁歪センサを有しており、被検知部表面に、磁歪特性が負の材料からなる表層部が設けられていることを特徴とするものである。
転がり軸受としては、深みぞ玉軸受、アンギュラ玉軸受、ころ軸受、ニードル軸受、スラスト軸受などのいずれの転がり軸受でも使用可能であり、また、単列のものだけでなく、複列のものにも適用できる。
固定側軌道部材は、ハウジングなどに取り付けられ、回転側軌道部材は、回転軸などに取り付けられる。磁歪センサは、一般的には、固定側軌道部材またはこれが固定されるハウジングなどの固定側部材に取り付けられる。なお、固定側部材とは、回転側部材と相対回転する部材の意であり、必ずしも固定されている必要はなく、固定側部材には、それ自体が回転するものも含まれるものとする。
この発明のセンサ付き転がり軸受ユニットによると、上記のセンサ装置と同様に、被検知部の表層部を磁歪特性が負の材料で形成することにより、磁歪センサの検知方向と歪みの方向とを適正な関係とすることができる。そして、回転側軌道部材に固定された主軸等の回転体が回転したり、回転体に荷重がかかると、転動部材と軌道部材の軌道面や肩部との間に作用する力が変化し、この結果、軌道部材の軌道面や肩部の歪み量が変動し、逆磁歪効果が得られる。したがって、この歪みの変動量から軌道部材への作用力の変動量を精度よく求めることができる。また、この歪みの変動量から軌道部材の変位や回転情報を求めることもできる。
上記のセンサ付き転がり軸受ユニットにおいて、固定側軌道部材および回転側軌道部材は、いずれも軸受用鋼のような磁歪特性が正の材料によって形成されていることがある。すなわち、固定側軌道部材および回転側軌道部材は、本体部分が磁歪特性が正の材料で形成され、表層部が磁歪特性が負の材料で形成された二層構造とされ、これにより、軸受としての耐久性等の基本性能が確保されるとともに、被検知部として必要な歪み特性も確保される。
また、上記のセンサ付き転がり軸受ユニットは、固定側軌道部材が車体側、回転側軌道部材が車輪側に取り付けられるようになされて、センサ付きハブユニットとして使用されることがある。
センサ付きハブユニットは、車両に取り付けて使用される関係上、車体の各部材との干渉を避けかつ所定の強度を確保することが重要であり、上記のセンサ装置を備えた構成とすることにより、車体と干渉することなくかつ所定の強度を確保して、センサ装置を取り付けることが容易となる。そして、磁歪センサの出力からタイヤの接地荷重を検出することが可能となり、接地荷重を使用した車両の安定制御に寄与することができる。
センサ付きハブユニットでは、固定側軌道部材の外周に、被検知部表層部が設けられており、磁歪センサは、固定側軌道部材の軸方向の圧縮歪みを測定可能なように、軸方向からこの被検知部表層部を臨むように配置されていることがあり、また、回転側軌道部材は、車輪取付け用のフランジを有する内軸および内軸に嵌められた内輪を有し、内輪の外周に被検知部表層部が設けられており、磁歪センサは、内輪の軸方向の圧縮歪みを測定可能なように、軸方向外方から被検知部表層部を臨むように配置されていることがある。なお、前者の場合、被検知部表層部の設置位置は、二列の転動部材(玉)の中心線に一致させられる。
タイヤに接地荷重が作用すると、ハブユニット各部には圧縮または引張りの歪みが生じる。これらの歪みのうち、内輪の軸方向圧縮歪みおよび車体側軌道部材の転動部材の中心線近傍での軸方向圧縮歪みは大きいものであり、これらの歪みを適正な方向から臨むように磁歪センサを配置することにより、大きな逆磁歪効果が検知される。磁歪センサを配置するに際しては、車体の各部材との干渉や孔加工などに伴う強度低下の可能性があるが、車体の構造や検知対象とする歪みの方向に応じて、磁歪特性が負の材料からなる表層部を設けることにより、大きな逆磁歪効果が検知される位置への磁歪センサの配置が容易なる。こうして得られた逆磁歪効果は、タイヤの接地荷重の変動によって変動するので、磁歪センサの出力からタイヤの接地荷重の変動を精度よく求めることができる。
この発明のセンサ装置およびセンサ付き転がり軸受ユニットによると、被検知部に所要の処理を施すことで、磁歪センサの適正状態での設置を可能にし、磁歪センサの取付け位置が制約される場合であっても、逆磁歪効果を適正に検出することができる。
この発明の実施の形態を、以下図面を参照して説明する。
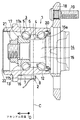
図1は、この発明のセンサ装置およびセンサ付き転がり軸受ユニットの第1実施形態を示している。以下の説明において、左右および上下は、図の左右および上下をいうものとする。なお、左が車両の内側に、右が車両の外側となっている。
このセンサ付き転がり軸受ユニットは、センサ付きハブユニットとして使用されるもので、ハブユニット(1)と、タイヤの接地荷重を検出するセンサ装置(2)とを備えている。
ハブユニット(1)は、車体側に固定される車体側軌道部材(3)、車輪が取り付けられる車輪側軌道部材(4)、両部材(3)(4)の間に2列に配置された複数の転動体である玉(5)、および各列の玉(5)をそれぞれ保持する保持器(6)を備えている。
車体側軌道部材(3)は、軸受の外輪(固定輪)機能を有しているもので、内周面に2列の外輪軌道が形成されている円筒部(12)と、円筒部(12)の左端部近くに設けられて懸架装置(車体)にボルトで取り付けられるフランジ部(13)とを有している。
車輪側軌道部材(4)は、第1の軌道溝(15a)を有する大径部(15)および第1の軌道溝(15a)の径よりも小さい外径を有する小径部(16)を有している内軸(14)と、内軸(14)の小径部(16)外径に嵌め止められて右面が内軸(14)の大径部(15)左面に密接させられている内輪(17)とからなる。内軸(14)の右端近くには、車輪を取り付けるための複数のボルト(19)が固定されたフランジ部(18)が設けられている。内輪(17)の右部には、内軸(14)の軌道溝(15a)と並列するように、軌道溝(17a)が形成されており、内輪(17)の左部に肩部(17b)が形成されている。車体側軌道部材(3)の右端部と内軸(14)との間には、シール装置(20)が設けられている。内軸(14)の小径部(16)の左端部には、おねじ部が設けられており、このおねじ部にねじ合わされたナット(21)によって、内輪(17)が内軸(14)に固定されている。車体側軌道部材(3)の左端部には、カバー(22)が被せ止められている。
センサ装置(2)は、車体側軌道部材(3)に取り付けられた支持部材(9)と、支持部材(9)に取り付けられた磁歪センサ(10)と、被検知部とされた車体側軌道部材(3)の外径に圧入された表層部としてのニッケル合金製リング(11)と、磁歪センサ(10)の出力を処理する処理手段(図示略)とを備えている。ニッケル合金製リング(11)は、2列の玉(5)の軸方向のちょうど中央に位置させられ、支持部材(9)は、このリング(11)に干渉しないように、車体側軌道部材(3)の外周面に水平状態で固定されている。磁歪センサ(10)は、磁気インピーダンスセンサとされており、そのセンシング面は、ニッケル合金製リング(11)の最下部に軸方向内方から臨まされている。
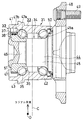
この第1実施形態と比較するのに好適な例を図2に示す。この比較例では、センサ装置(2)は、車体側軌道部材(3)に取り付けられた支持部材(7)と、支持部材(7)に取り付けられた磁歪センサ(8)とを備えている。そして、磁歪センサ(8)のセンシング面は、車体側軌道部材(3)の最下部の外周面に径方向外方から臨まされている。
車両の旋回時には、遠心力が作用して車体には横方向の荷重(アキシアル荷重)が掛かり、この荷重を受けたタイヤがグリップすることで、車体側軌道部材(3)に曲げが生じる。通常、ハブユニット(1)の二列の玉(5)間の中央を通る鉛直線(C)は、タイヤの中心(O)を通る鉛直線よりも軸方向外側にあり、ハブユニット(1)の車体側軌道部材(3)では、矢印で示すように、2列の玉(5)間の中央を通る鉛直線の近傍で相対的に大きな圧縮方向の歪みが生じる。磁歪センサ(8)は、軸受鋼などの一般的な鉄系の材料の圧縮歪みに対しては、これに直交する方向から臨まされたときに最大の感度を示す。したがって、図2に示すように、この車体側軌道部材(3)の最下部における軸方向圧縮歪みを検知するように、磁歪センサ(8)を車体側軌道部材(3)の玉近傍部の外周面のすぐ外方に配置することにより、大きな逆磁歪効果が検知される。この逆磁歪効果は、タイヤの接地荷重の変動によって変動するので、磁歪センサ(8)の出力からタイヤの接地荷重の変動を精度よく求めることができる。
ところで、車体側軌道部材(3)のフランジ部(13)には、懸架装置やブレーキ装置などの車体側部材が取り付けられることから、図2に示すように取り付けられた支持部材(7)は、車体側部材の構成や形状に影響されて、これらの車体側部材と干渉する場合が生じ得る。これに対し、図1に示すように取り付けられた支持部材(9)によると、車体側部材と干渉するという問題が解消される。しかしながら、上述したように、車体側軌道部材(3)の最下部における歪みは圧縮歪みであり、磁歪センサ(8)は、圧縮歪みに対しては、これに直交する方向から臨まされたときに最大の感度を示すものであるから、図2において、磁歪センサを図1に示すように設置したのでは、適正な検出ができなくなってしまう。
そこで、この実施形態では、図1に示すように、被検知部とされた車体側軌道部材(3)の外径の二列の玉(5)間の中央に表層部としてのニッケル合金製リング(11)が設けられて、磁歪センサ(10)のセンシング面は、そのニッケル合金製リング(11)の最下部(車体側軌道部材(3)の最も歪む位置)に軸方向内方から臨まされている。
ニッケル合金製リング(11)は、負の磁歪特性を有しており、この場合に、磁歪センサ(10)は、軸方向の圧縮歪みに対して、これと同じ方向(軸方向)から臨まされたときに最大の感度を示す。したがって、図1のように配置された磁歪センサ(10)からは、大きな逆磁歪効果が検知される。この逆磁歪効果は、磁歪特性の正負にかかわらず、タイヤの接地荷重の変動によって変動するので、磁歪センサ(10)の出力からタイヤの接地荷重の変動を精度よく求めることができる。
上記実施形態において、車体側軌道部材(3)および車輪側軌道部材(4)は、機械構造用炭素鋼(S55C)や高炭素クロム軸受鋼(SUJ2)製、玉(5)は、高炭素クロム軸受鋼(SUJ2)、保持器(6)は、樹脂製(ポリアミド66)とされている。玉(5)については、セラミックス製とすることができる。玉(5)をセラミックス製とすると、車体側軌道部材(3)および車輪側軌道部材(4)が鉄系磁性体であるため磁性を有しているのに対し、玉(5)および保持器(6)が非磁性材料によって形成されていることになるので、内輪(17)および内軸(14)の回転に伴ってこれらが磁歪センサ(10)に対し近づいたり遠ざかったりしても、車体側軌道部材(3)の玉近傍部の磁場には影響を及ぼさないため、玉(5)および保持器(6)の回転に起因する誤差(ノイズ)が生じず、高感度の磁歪センサ(10)が検知するデータに含まれる誤差を非常に小さくすることができる。玉(5)が高炭素クロム軸受鋼(SUJ2)であっても、磁歪センサ(10)が検知するデータは十分な精度を有しており、こうして、このセンサ付きハブユニットによると、磁歪センサ(10)によって、ハブユニット(1)の回転(回転数、回転速度、回転角度など)が求められるとともに、ハブユニット(1)にかかる力が精度よく検出される。
磁歪特性が負である表層部を形成するには、ニッケル合金製リング(11)に限定されるものではなく、ニッケル合金以外の磁歪特性が負の材料からなるリングを圧入してもよく、リングを圧入するのではなく、メッキなどの表面処理手段によって表層部を形成もよく、また、固定側部材なら必ずしも被検知部がリング形状である必要はなく、固定側に設けられたセンサに対向する部分のみが負の磁歪特性を有しているようにしてもよく、要するに、磁歪センサが臨まされる部分が負の磁歪特性を有するように加工されていればよい。
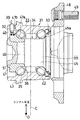
図3は、この発明のセンサ装置およびセンサ付き転がり軸受ユニットの第2実施形態を示している。
このセンサ付きハブユニットは、ハブユニット(31)と、その回転および接地荷重を検出するセンサ装置(32)とを備えている。
ハブユニット(31)は、車体側に固定される車体側軌道部材(33)、車輪が取り付けられる車輪側軌道部材(34)、両部材(33)(34)の間に2列に配置された複数の転動体である玉(35)、および各列の玉(35)をそれぞれ保持する保持器(36)を備えている。
車体側軌道部材(33)は、軸受の外輪(固定輪)機能を有しているもので、内周面に2列の外輪軌道が形成されている円筒部(42)と、円筒部(42)の左端部近くに設けられて懸架装置(車体)にボルトで取り付けられるフランジ部(43)とを有している。
車輪側軌道部材(34)は、第1の軌道溝(45a)を有する大径部(45)および第1の軌道溝(45a)の径よりも小さい外径を有する小径部(46)を有している内軸(44)と、内軸(44)の小径部(46)外径に嵌め止められて右面が内軸(44)の大径部(45)左面に密接させられている内輪(47)とからなる。内軸(44)の右端近くには、車輪を取り付けるための複数のボルト(49)が固定されたフランジ部(48)が設けられている。内輪(47)の右部には、内軸(44)の軌道溝(45a)と並列するように、軌道溝(47a)が形成されており、内輪(47)の左部に肩部(47b)が形成されている。車体側軌道部材(33)の右端部と内軸(44)との間には、シール装置(50)が設けられている。内軸(44)の小径部(46)の左端部は、かしめられており、このかしめ部(51)によって、内輪(47)が内軸(44)に固定されている。
センサ装置(32)は、車体側軌道部材(33)に取り付けられた支持部材(37)と、支持部材(37)に取り付けられた磁歪センサ(38)と、被検知部とされた内輪(47)外径に圧入された表層部としてのニッケル合金製リング(41)と、磁歪センサ(38)の出力を処理する処理手段(図示略)とを備えている。そして、磁歪センサ(38)は、磁気インピーダンスセンサとされており、そのセンシング面は、ニッケル合金製リング(41)に軸方向から臨まされている。
この第2実施形態と比較するのに好適な例を図4に示す。この比較例では、センサ装置(32)は、車体側軌道部材(33)に取り付けられた支持部材(39)と、支持部材(39)に取り付けられた磁歪センサ(40)とを備えている。そして、磁歪センサ(40)のセンシング面は、車輪側軌道部材(34)の内輪(47)の最上部の外周面における圧縮歪みを測定するように、車輪側軌道部材(34)の内輪肩部(47b)の最上部に径方向外方から臨まされている。タイヤに接地荷重が作用すると、ハブユニット(31)各部には圧縮または引張りの歪みが生じる。垂直荷重(ラジアル荷重)に対しては、車体側との関係から、車輪側軌道部材(34)に曲げが生じ、矢印で示すように、内輪(47)に大きな圧縮方向の歪みが生じる。磁歪センサ(40)は、軸受鋼などの一般的な鉄系の材料の圧縮歪みに対しては、これと直交する方向から臨まされたときに最大の感度を示すので、図4に示すように、この内輪(47)の軸方向圧縮歪みを検知するように、磁歪センサ(40)を内輪肩部(47b)の径方向外方に配置することにより、大きな逆磁歪効果が検知される。この逆磁歪効果は、タイヤの接地荷重の変動によって変動するので、磁歪センサ(40)の出力からタイヤの接地荷重の変動を精度よく求めることができる。
ところで、図4に示すように支持部材(39)を取り付けるには、車体側軌道部材(33)にに支持部材(39)を通す孔を加工する必要があり、これはコストアップと剛性低下を招く。これに対し、図3に示すように取り付けられた支持部材(37)によると、これらの問題が解消される。
図3において、ニッケル合金製リング(41)は、負の磁歪特性を有しており、この場合に、磁歪センサ(38)は、圧縮歪みに対しては、これに平行な方向から臨まされたときに最大の感度を示す。したがって、この磁歪センサ(38)からは、大きな逆磁歪効果が検知される。この逆磁歪効果は、磁歪特性の正負にかかわらず、タイヤの接地荷重の変動によって変動するので、磁歪センサ(38)の出力からタイヤの接地荷重の変動を精度よく求めることができる。
なお、上記第1実施形態では、固定側軌道部材(3)の外径を被検知部とする例を示し、第2実施形態では、回転側軌道部材(34)の内輪(47)を被検知部とする例を示したが、被検知部は、その他の部分であってもよく、上記の負の磁歪特性を有する表層部を設ける技術は、圧縮歪みまたは引張り歪みが生じる被検知部に対して、磁歪センサの取付け位置が制約される場合に、種々適用が可能である。すなわち、従来は、まず、被検知部を決め、その部分の歪みが圧縮か引張りかを求め、その歪みの方向に対応するように磁歪センサを設置していたが、負の磁歪特性を有する表層部の有無を選択することにより、被検知部が決まった場合に、先に、この被検知部の近傍の他の部材と干渉しない位置に磁歪センサを設置し、歪みの方向に応じた調整が不要な場合には、負の磁歪特性を有する表層部を設けることなくセンサ装置を構成し、歪みの方向に応じた調整が必要な場合には、負の磁歪特性を有する表層部をセンサ装置に追加すればよい。このようにして、センサ装置とこれが取り付けられる部材近傍との干渉や強度低下を避けかつ磁歪センサの最適な感度での検知が可能となる。
上記においては、センサ付き転がり軸受ユニットとして、センサ付きハブユニットに使用されるものを説明したが、上記のセンサ装置(2)(32)は、固定側軌道部材(3)に対応する位置に配されている外輪、回転側軌道部材(4)に対応する位置に配されている内輪、および1列または2列の転動部材を有する種々の転がり軸受にももちろん適用できる。
(1) 転がり軸受
(2) センサ装置
(3) 固定側軌道部材(被検知部)
(4) 回転側軌道部材
(5) 玉(転動部材)
(10)(38) 磁気インピーダンスセンサ(磁歪センサ)
(14)44) 内軸
(17)(47) 内輪(被検知部)
(11)(41) ニッケル合金製リング(表層部)
(2) センサ装置
(3) 固定側軌道部材(被検知部)
(4) 回転側軌道部材
(5) 玉(転動部材)
(10)(38) 磁気インピーダンスセンサ(磁歪センサ)
(14)44) 内軸
(17)(47) 内輪(被検知部)
(11)(41) ニッケル合金製リング(表層部)
Claims (9)
- 圧縮歪みまたは引張り歪みを受ける被検知部と、被検知部の逆磁歪効果を検知する磁歪センサとを備えており、被検知部に、磁歪特性が負の材料からなる表層部が設けられていることを特徴とするセンサ装置。
- 被検知部の圧縮歪みが測定されるものであり、磁歪センサのセンシング面は、圧縮歪みの方向と同じ方向から被検知部表層部を臨むように設けられている請求項1のセンサ装置。
- 被検知部の引張り歪みが測定されるものであり、磁歪センサのセンシング面は、引張り歪みの方向に垂直な方向から被検知部表層部を臨むように設けられている請求項1のセンサ装置。
- 磁歪特性が負の材料は、ニッケル鋼またはニッケル合金である請求項1のセンサ装置。
- 固定側軌道部材、回転側軌道部材および転動部材を有する転がり軸受と、センサ装置とを備えているセンサ付き転がり軸受ユニットにおいて、
センサ装置は、被検知部の逆磁歪効果を検知する磁歪センサを有しており、被検知部表面に、磁歪特性が負の材料からなる表層部が設けられていることを特徴とするセンサ付き転がり軸受ユニット。 - 固定側軌道部材および回転側軌道部材は、いずれも磁歪特性が正の材料によって形成されている請求項5のセンサ付き転がり軸受ユニット。
- 固定側軌道部材が車体側、回転側軌道部材が車輪側に取り付けられるセンサ付きハブユニットとされている請求項5または6のセンサ付き転がり軸受ユニット。
- 固定側軌道部材の外周に、被検知部表層部が設けられており、磁歪センサは、固定側軌道部材の軸方向の圧縮歪みを測定可能なように、軸方向からこの被検知部表層部を臨むように配置されている請求項7のセンサ付き転がり軸受ユニット。
- 回転側軌道部材は、車輪取付け用のフランジを有する内軸および内軸に嵌められた内輪を有し、内輪の外周に被検知部表層部が設けられており、磁歪センサは、内輪の軸方向の圧縮歪みを測定可能なように、軸方向外方から被検知部表層部を臨むように配置されている請求項7のセンサ付き転がり軸受ユニット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004279611A JP2006090958A (ja) | 2004-09-27 | 2004-09-27 | センサ装置およびセンサ付き転がり軸受ユニット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004279611A JP2006090958A (ja) | 2004-09-27 | 2004-09-27 | センサ装置およびセンサ付き転がり軸受ユニット |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006090958A true JP2006090958A (ja) | 2006-04-06 |
Family
ID=36232083
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004279611A Withdrawn JP2006090958A (ja) | 2004-09-27 | 2004-09-27 | センサ装置およびセンサ付き転がり軸受ユニット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006090958A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008074135A (ja) * | 2006-09-19 | 2008-04-03 | Ntn Corp | インホイール型モータ内蔵センサ付きアクスルユニット |
| JP2009539052A (ja) * | 2006-06-10 | 2009-11-12 | シエフレル・コマンデイトゲゼルシヤフト | トルク測定を統合された軸受装置及びトルク分配を制御する装置 |
| WO2013004408A1 (de) * | 2011-07-07 | 2013-01-10 | Schaeffler Technologies AG & Co. KG | Antriebssystem mit einem lagerverkippungsdetektierungssystem und elektro- oder hybridfahrzeug mit diesem |
-
2004
- 2004-09-27 JP JP2004279611A patent/JP2006090958A/ja not_active Withdrawn
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009539052A (ja) * | 2006-06-10 | 2009-11-12 | シエフレル・コマンデイトゲゼルシヤフト | トルク測定を統合された軸受装置及びトルク分配を制御する装置 |
| JP4873278B2 (ja) * | 2006-06-10 | 2012-02-08 | シエフレル・コマンデイトゲゼルシヤフト | トルク測定を統合された軸受装置 |
| JP2008074135A (ja) * | 2006-09-19 | 2008-04-03 | Ntn Corp | インホイール型モータ内蔵センサ付きアクスルユニット |
| US8307931B2 (en) | 2006-09-19 | 2012-11-13 | Ntn Corporation | Sensor-equipped axle unit having a built-in motor of in-wheel type |
| WO2013004408A1 (de) * | 2011-07-07 | 2013-01-10 | Schaeffler Technologies AG & Co. KG | Antriebssystem mit einem lagerverkippungsdetektierungssystem und elektro- oder hybridfahrzeug mit diesem |
| CN103874596A (zh) * | 2011-07-07 | 2014-06-18 | 舍弗勒技术有限两合公司 | 具有轴承倾斜探测系统的驱动系统和具有该驱动系统的电动汽车或混合动力汽车 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8021052B2 (en) | Sensor-equipped bearing for wheel | |
| US8539676B2 (en) | Rolling bearing system for vehicles | |
| WO2006100887A1 (ja) | センサ付車輪用軸受 | |
| US20110214513A1 (en) | Sensor-equipped bearing for wheel | |
| WO2004076873A1 (ja) | センサ付き転がり軸受ユニット | |
| US10598226B2 (en) | Bearing device for vehicle wheel | |
| US20110158571A1 (en) | Inner ring of wheel bearing device, manufacturing method therefor, and wheel bearing device | |
| JP2006090958A (ja) | センサ装置およびセンサ付き転がり軸受ユニット | |
| JP4239758B2 (ja) | センサ付きハブユニット | |
| JP3988702B2 (ja) | センサ付きハブユニット | |
| JP2019019922A (ja) | センサ付き転がり軸受 | |
| JP6290543B2 (ja) | 車輪用軸受装置 | |
| JP3427829B2 (ja) | エンコーダ付転がり軸受ユニット | |
| JP6239842B2 (ja) | 車輪用軸受装置 | |
| JP4245249B2 (ja) | 軸受装置 | |
| JP2005048823A (ja) | センサ付きハブユニット | |
| JP2008207591A (ja) | 車軸用軸受装置 | |
| JP4218361B2 (ja) | センサ付き転がり軸受ユニット | |
| JP2005099003A (ja) | センサ付きハブユニット | |
| JP4029811B2 (ja) | センサ付きハブユニット | |
| JP2008008463A (ja) | センサ付き転がり軸受装置 | |
| JP4591485B2 (ja) | 軸受装置 | |
| JP2006226477A (ja) | センサ付き転がり軸受装置 | |
| JP4178978B2 (ja) | センサ付き転がり軸受ユニット | |
| JP2007078073A (ja) | 車輪用転がり軸受装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20071204 |