CN112135129A - Inter-frame prediction method and device - Google Patents
Inter-frame prediction method and device Download PDFInfo
- Publication number
- CN112135129A CN112135129A CN201910600591.9A CN201910600591A CN112135129A CN 112135129 A CN112135129 A CN 112135129A CN 201910600591 A CN201910600591 A CN 201910600591A CN 112135129 A CN112135129 A CN 112135129A
- Authority
- CN
- China
- Prior art keywords
- mode
- current
- value
- image block
- flag
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 129
- 230000004927 fusion Effects 0.000 claims abstract description 426
- 238000012545 processing Methods 0.000 claims description 103
- 238000009795 derivation Methods 0.000 claims description 101
- 230000015654 memory Effects 0.000 claims description 50
- 238000004458 analytical method Methods 0.000 claims description 18
- 238000013139 quantization Methods 0.000 description 74
- 239000013598 vector Substances 0.000 description 67
- 239000000872 buffer Substances 0.000 description 35
- 230000008569 process Effects 0.000 description 33
- 238000004891 communication Methods 0.000 description 29
- 238000010586 diagram Methods 0.000 description 23
- 208000037170 Delayed Emergence from Anesthesia Diseases 0.000 description 16
- 238000005192 partition Methods 0.000 description 14
- 230000002123 temporal effect Effects 0.000 description 10
- 238000003491 array Methods 0.000 description 9
- 230000006835 compression Effects 0.000 description 9
- 238000007906 compression Methods 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 8
- 230000003044 adaptive effect Effects 0.000 description 7
- 238000005457 optimization Methods 0.000 description 7
- 241000023320 Luma <angiosperm> Species 0.000 description 6
- 238000001914 filtration Methods 0.000 description 6
- OSWPMRLSEDHDFF-UHFFFAOYSA-N methyl salicylate Chemical compound COC(=O)C1=CC=CC=C1O OSWPMRLSEDHDFF-UHFFFAOYSA-N 0.000 description 6
- 238000004590 computer program Methods 0.000 description 5
- 238000013500 data storage Methods 0.000 description 5
- 238000005516 engineering process Methods 0.000 description 5
- 238000000638 solvent extraction Methods 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 4
- 238000003672 processing method Methods 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- 230000011664 signaling Effects 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 230000007704 transition Effects 0.000 description 3
- PXFBZOLANLWPMH-UHFFFAOYSA-N 16-Epiaffinine Natural products C1C(C2=CC=CC=C2N2)=C2C(=O)CC2C(=CC)CN(C)C1C2CO PXFBZOLANLWPMH-UHFFFAOYSA-N 0.000 description 2
- 230000002146 bilateral effect Effects 0.000 description 2
- 238000004422 calculation algorithm Methods 0.000 description 2
- 230000000295 complement effect Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 230000018109 developmental process Effects 0.000 description 2
- 239000000835 fiber Substances 0.000 description 2
- 238000009499 grossing Methods 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 238000012805 post-processing Methods 0.000 description 2
- 238000007781 pre-processing Methods 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 238000009966 trimming Methods 0.000 description 2
- 238000012952 Resampling Methods 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 230000003190 augmentative effect Effects 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
Images











Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/13—Adaptive entropy coding, e.g. adaptive variable length coding [AVLC] or context adaptive binary arithmetic coding [CABAC]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/107—Selection of coding mode or of prediction mode between spatial and temporal predictive coding, e.g. picture refresh
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/42—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by implementation details or hardware specially adapted for video compression or decompression, e.g. dedicated software implementation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/56—Motion estimation with initialisation of the vector search, e.g. estimating a good candidate to initiate a search
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/70—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by syntax aspects related to video coding, e.g. related to compression standards
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Abstract
The application provides an inter-frame prediction method and device. The method comprises the following steps: after determining that the current image block uses the fusion mode to perform inter-frame prediction, determining whether the current image block allows each of K alternative fusion modes to be used; under the condition that the current image block allows to use a current fusion mode and the current image block allows to use a fusion mode except the current fusion mode in the K standby fusion modes, analyzing a code stream to obtain a value of a first identifier of the current fusion mode; and under the condition that the value of the first identifier indicates that the fusion mode for inter-frame prediction of the current image block is the current fusion mode, performing inter-frame prediction on the current image block by using the current fusion mode to obtain a prediction block of the current image block. In the method and the device, the parsing redundancy of the fusion syntax elements is removed, the decoding complexity is reduced to a certain extent, and the decoding efficiency is improved.
Description
Technical Field
The present application relates to the field of video image processing technologies, and in particular, to an inter-frame prediction method and apparatus.
Background
Digital video capabilities can be incorporated into a wide variety of devices, including digital televisions, digital direct broadcast systems, wireless broadcast systems, Personal Digital Assistants (PDAs), laptop or desktop computers, tablet computers, electronic book readers, digital cameras, digital recording devices, digital media players, video gaming devices, video gaming consoles, cellular or satellite radio telephones (so-called "smart phones"), video teleconferencing devices, video streaming devices, and the like. Digital video devices implement video compression techniques, such as those described in the standards defined by MPEG-2, MPEG-4, ITU-T H.263, ITU-T H.264/MPEG-4 part 10 Advanced Video Coding (AVC), the video coding standard H.265/High Efficiency Video Coding (HEVC), and extensions of such standards. Video devices may transmit, receive, encode, decode, and/or store digital video information more efficiently by implementing such video compression techniques.
Video compression techniques perform spatial (intra-picture) prediction and/or temporal (inter-picture) prediction to reduce or remove redundancy inherent in video sequences. For block-based video coding, a video slice (i.e., a video frame or a portion of a video frame) may be partitioned into tiles, which may also be referred to as treeblocks, Coding Units (CUs), and/or coding nodes. An image block in a to-be-intra-coded (I) strip of an image is encoded using spatial prediction with respect to reference samples in neighboring blocks in the same image. An image block in a to-be-inter-coded (P or B) slice of an image may use spatial prediction with respect to reference samples in neighboring blocks in the same image or temporal prediction with respect to reference samples in other reference images. A picture may be referred to as a frame and a reference picture may be referred to as a reference frame.
Currently, a merge (merge) technique is an inter prediction technique, and determines motion information with the minimum rate-distortion (RD) cost in a candidate motion vector list as a Motion Vector Predictor (MVP) of a current block by constructing the candidate motion vector list. If the current image block uses the fusion technology to perform inter-frame prediction, a fusion mode needs to be selected to obtain inter-frame prediction parameters to perform inter-frame prediction on the current image block, and the fusion mode may include: one or more of a conventional blend mode, a blend with motion vector difference (MMVD) mode, a sub-block blend mode (SBMM), a combined intra and intra prediction mode (CIIP), and a triangle prediction unit (TPM). In the syntax parsing process of the fusion data (merge data), it is necessary to sequentially determine which one or more fusion modes are finally used to perform inter-frame prediction on the current image block, so that there will be parsing redundancy, which results in higher decoding complexity and lower decoding efficiency in some cases.
Disclosure of Invention
The application provides an inter-frame prediction method and an inter-frame prediction device, which can reduce the decoding complexity to a certain extent and improve the decoding efficiency.
In a first aspect, the present application provides an inter prediction method, which can be applied in a video decoder. The method can comprise the following steps: after determining that the current image block uses the fusion mode to perform inter-frame prediction, determining whether the current image block allows each of K alternative fusion modes to be used, wherein K is a positive integer greater than or equal to 2; under the condition that the current image block allows the current fusion mode to be used and the current image block allows the fusion mode except the current fusion mode in the K alternative fusion modes to be used, analyzing and obtaining a first identifier value of the current fusion mode from the code stream; and under the condition that the value of the first identifier indicates that the fusion mode for inter-frame prediction of the current image block is the current fusion mode, performing inter-frame prediction on the current image block by using the current fusion mode to obtain a prediction block of the current image block.
In this application, the second identifier is used to indicate whether the current image block uses the corresponding fusion mode. The first identification may include, but is not limited to: one or more of a regular _ merge _ flag, an mmvd _ merge _ flag, a merge _ sublock _ flag, a ciip _ flag, a merge _ triangle _ flag, and the like.
The merge _ triangle _ flag may be a MergeTriangleFlag.
In the application, on the premise that the decoder determines that the current image block uses the fusion mode to perform inter-frame prediction, if the current image block allows the current fusion mode to be used and the current image block allows the fusion mode except the current fusion mode among the K alternative fusion modes to be used, the decoder uses the current fusion mode to perform inter-frame prediction on the current image block according to the indication of the value of the first identifier of the current image block obtained by analyzing in the code stream so as to obtain the prediction block of the current image block, and does not need to analyze the values of the first identifiers of the fusion modes except the current fusion mode among the K alternative fusion modes, so that the analysis redundancy of the fusion syntax elements is removed, the decoding complexity is reduced to a certain extent, and the decoding efficiency is improved.
Based on the first aspect, in some possible embodiments, the method further includes: and under the condition that the current image block does not allow the use of a fusion mode except the current fusion mode of the K alternative fusion modes, performing inter-frame prediction on the current image block by using the current fusion mode to obtain a prediction block of the current image block.
Based on the first aspect, in some possible embodiments, determining whether the current image block allows using each of the K candidate fusion modes includes: acquiring a prediction parameter corresponding to a current image block; determining whether the current image block allows to use each fusion mode or not according to the prediction parameters; wherein the prediction parameters include one or more of: an indication of a syntax element of a superior video processing unit related to the current image block, a size of the current image block, indication information indicating whether the current image block has a residual, a type of the superior video processing unit.
Based on the first aspect, in some possible embodiments, the upper level video processing unit includes a slice in which the current image block is located, a slice group in which the current image block is located, an image in which the current image block is located, or a video sequence in which the current image block is located.
Based on the first aspect, in some possible embodiments, in a case that the current image block allows the current fusion mode to be used, and the current image block allows a fusion mode other than the current fusion mode among the K candidate fusion modes to be used, parsing the code stream to obtain a value of the first identifier of the current fusion mode includes: under the condition that the current image block allows to use at least one of an MMVD mode, an SBMM, a CIIP mode and a TPM, analyzing and obtaining a regular _ merge _ flag value of a traditional fusion mode from a code stream; wherein, the regular _ merge _ flag is a first flag of the conventional fusion mode.
Based on the first aspect, in some possible embodiments, in a case that the current image block allows the current fusion mode to be used, and the current image block allows a fusion mode other than the current fusion mode among the K candidate fusion modes to be used, parsing the code stream to obtain a value of the first identifier of the current fusion mode includes: under the condition that the current image block allows to use the MMVD mode and the current image block allows to use at least one of the SBMM, the CIIP mode and the TPM, analyzing and obtaining the value of MMVD _ merge _ flag of the MMVD mode from the code stream; and the MMVD _ merge _ flag is a first identifier of the MMVD mode.
Based on the first aspect, in some possible embodiments, in a case that the current image block allows the current fusion mode to be used, and the current image block allows a fusion mode other than the current fusion mode among the K candidate fusion modes to be used, parsing the code stream to obtain a value of the first identifier of the current fusion mode includes: under the condition that the current image block allows the SBMM mode to be used and the current image block allows the CIIP mode and/or the TPM to be used, analyzing the code stream to obtain the value of merge _ sub _ flag of the SBMM; and the merge _ sublock _ flag is a first identifier of the SBMM.
Based on the first aspect, in some possible embodiments, in a case that the current image block allows the current fusion mode to be used, and the current image block allows a fusion mode other than the current fusion mode among the K candidate fusion modes to be used, parsing the code stream to obtain a value of the first identifier of the current fusion mode includes: under the condition that the current image block allows using the CIIP mode and the TPM, analyzing and obtaining a value of the CIIP _ flag of the CIIP mode from the code stream; and the CIIP _ flag is a first identifier of the CIIP mode.
Based on the first aspect, in some possible embodiments, the method further includes: and when the current image block does not allow the current fusion mode to be used or the current image block does not allow the fusion mode except the current fusion mode in the K candidate fusion modes to be used, obtaining the value of the first identifier of the current fusion mode through derivation.
Based on the first aspect, in some possible embodiments, the method further includes: and when the value of the first identifier of the current fusion mode cannot be obtained by analyzing the code stream, the value of the first identifier of the current fusion mode is obtained by deduction.
Based on the first aspect, in some possible embodiments, the current fusion mode is a conventional fusion mode, and obtaining a value of a first identifier of the current fusion mode by derivation includes: setting general _ merge _ flag to the value of regular _ merge _ flag; or, setting the value of regular _ merge _ flag to a first value; the general _ merge _ flag is used to indicate whether an inter prediction parameter of a current image block is obtained from an adjacent inter prediction block, and the regular _ merge _ flag is a first identifier of a conventional fusion mode.
Based on the first aspect, in some possible embodiments, the current fusion mode is an MMVD mode, and the value of the first flag MMVD _ merge _ flag of the MMVD mode is set to a first value when the first derivation condition is satisfied; wherein the first derivation condition includes: the current image block allows the MMVD mode to be used.
Based on the first aspect, in some possible embodiments, the obtaining, by deriving the value of the first identifier of the current fusion mode, that the current fusion mode is SBMM includes: under the condition that a second derivation condition is met, setting the value of a first identification merge _ sublock _ flag of the SBMM as a first value; wherein the second derivation condition includes: the current image block allows SBMM to be used.
Based on the first aspect, in some possible embodiments, the obtaining, by derivation, a value of a first identifier of the current fusion mode is that the current fusion mode is a CIIP mode, and includes: under the condition that a third derivation condition is met, setting the value of a first identifier CIIP _ flag of the CIIP mode as a first value; wherein the third derivation condition includes: the current tile allows the CIIP mode to be used.
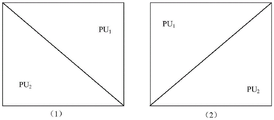
Based on the first aspect, in some possible embodiments, the obtaining, by deriving the value of the first identifier of the current fusion mode, that the current fusion mode is a TPM includes: under the condition that a fourth derivation condition is met, setting the value of a first identification merge _ triangle _ flag of the TPM to be a first value; wherein the fourth derivation condition includes: the current image block allows the TPM to be used.
The merge _ triangle _ flag may be a MergeTriangleFlag.
Based on the first aspect, in some possible embodiments, the K candidate fusion modes include a plurality of: traditional fusion mode, MMVD mode, SBMM, CIIP mode, TPM.
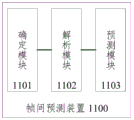
In a second aspect, the present application provides an inter-frame prediction apparatus, which can be applied in a video decoder. The apparatus may include: the determining module is used for determining whether the current image block allows each of K alternative fusion modes to be used or not after determining that the current image block uses the fusion mode for inter-frame prediction, wherein K is a positive integer greater than or equal to 2; the analysis module is used for analyzing and obtaining a value of a first identifier of the current fusion mode from the code stream under the condition that the current image block allows the current fusion mode to be used and the current image block allows the fusion mode except the current fusion mode in the K alternative fusion modes to be used; and the prediction module is used for performing inter prediction on the current image block by using the current fusion mode to obtain a prediction block of the current image block under the condition that the value of the first identifier indicates that the fusion mode for performing inter prediction on the current image block is the current fusion mode.
Based on the second aspect, in some possible embodiments, the prediction module is further configured to perform inter prediction on the current image block using the current fusion mode to obtain a prediction block of the current image block, in a case that the current image block does not allow the use of a fusion mode other than the current fusion mode from the K candidate fusion modes.
Based on the second aspect, in some possible embodiments, the determining module is configured to obtain a prediction parameter corresponding to a current image block; determining whether the current image block allows to use each fusion mode or not according to the prediction parameters; wherein the prediction parameters include one or more of: an indication of a syntax element of a superior video processing unit related to the current image block, a size of the current image block, indication information indicating whether the current image block has a residual, a type of the superior video processing unit.
Based on the second aspect, in some possible embodiments, the superior video processing unit includes a slice in which the current image block is located, a slice group in which the current image block is located, an image in which the current image block is located, or a video sequence in which the current image block is located.
Based on the second aspect, in some possible embodiments, the parsing module is configured to, in a case that the current tile block allows to use at least one of the MMVD mode, the SBMM mode, the CIIP mode, and the TPM, parse the current tile block to obtain a value of a regular _ merge _ flag in the conventional fusion mode; wherein, the regular _ merge _ flag is a first flag of the conventional fusion mode.
Based on the second aspect, in some possible embodiments, the parsing module is configured to, in a case that the MMVD mode is allowed to be used by the current tile, and the current tile is allowed to use at least one of the SBMM, the CIIP mode, and the TPM, parse the MMVD _ merge _ flag value of the MMVD mode from the bitstream; and the MMVD _ merge _ flag is a first identifier of the MMVD mode.
Based on the second aspect, in some possible embodiments, the parsing module is configured to, in a case that the current tile allows the SBMM mode to be used, and the current tile allows the CIIP mode and/or the TPM, parse the bitstream to obtain a value of merge _ sub _ flag of the SBMM; and the merge _ sublock _ flag is a first identifier of the SBMM.
Based on the second aspect, in some possible embodiments, the parsing module is configured to, in a case that the current tile allows to use the CIIP mode and the TPM, parse the value of the CIIP _ flag of the CIIP mode from the code stream; and the CIIP _ flag is a first identifier of the CIIP mode.
Based on the second aspect, in some possible embodiments, the apparatus further includes: and the derivation module is used for obtaining the value of the first identifier of the current fusion mode through derivation when the current image block does not allow the current fusion mode to be used or the current image block does not allow the fusion mode except the current fusion mode in the K alternative fusion modes to be used.
Based on the second aspect, in some possible embodiments, the apparatus further includes: and the derivation module is used for obtaining the value of the first identifier of the current fusion mode through derivation when the value of the first identifier of the current fusion mode cannot be obtained through analysis from the code stream.
Based on the second aspect, in some possible embodiments, the current fusion mode is a conventional fusion mode, and the derivation module is configured to set general _ merge _ flag to a value of regular _ merge _ flag; or, setting the value of regular _ merge _ flag to a first value; the general _ merge _ flag is used to indicate whether an inter prediction parameter of a current image block is obtained from an adjacent inter prediction block, and the regular _ merge _ flag is a first identifier of a conventional fusion mode.
Based on the second aspect, in some possible embodiments, the current fusion mode is an MMVD mode, and the derivation module is configured to set a value of a first flag MMVD _ merge _ flag of the MMVD mode to a first value if a first derivation condition is satisfied; wherein the first derivation condition includes: the current image block allows the MMVD mode to be used.
Based on the second aspect, in some possible embodiments, when the current fusion mode is the SBMM, the deriving module is configured to set a value of a first flag merge _ sublock _ flag of the SBMM to a first value if a second deriving condition is satisfied; wherein the second derivation condition includes: the current image block allows SBMM to be used.
Based on the second aspect, in some possible embodiments, the current merging mode is a CIIP mode, and the deriving module is configured to set a value of a first flag CIIP _ flag of the CIIP mode to a first value when a third deriving condition is satisfied; wherein the third derivation condition includes: the current tile allows the CIIP mode to be used.
Based on the second aspect, in some possible embodiments, the current fusion mode is a TPM mode, and the deriving module is configured to set a value of a first flag merge _ triangle _ flag of the TPM to be a first value if a fourth deriving condition is met; wherein the fourth derivation condition includes: the current image block allows the TPM to be used.
Based on the second aspect, in some possible embodiments, the K candidate fusion modes include a plurality of: traditional fusion mode, MMVD mode, SBMM, CIIP mode, TPM.
In a third aspect, the present application provides a video decoder for decoding image blocks from a bitstream, comprising: the entropy decoding module is used for decoding an index identifier from the code stream, and the index identifier is used for indicating target candidate motion information of the current decoded image block; the inter-frame prediction apparatus according to any one of the above second aspects, wherein the inter-frame prediction apparatus is configured to predict motion information of a currently decoded image block based on target candidate motion information indicated by the index identifier, and determine a predicted pixel value of the currently decoded image block based on the motion information of the currently decoded image block; a reconstruction module for reconstructing the current decoded image block based on the predicted pixel values.
In a fourth aspect, the present application provides an apparatus for decoding video data, the apparatus comprising: the memory is used for storing video data in a code stream form; and the video decoder is used for decoding the video data from the code stream.
In a fifth aspect, the present application provides a decoding device comprising: a non-volatile memory and a processor coupled to each other, the processor calling program code stored in the memory to perform part or all of the steps of any one of the methods of the first aspect.
In a sixth aspect, the present application provides a computer readable storage medium storing program code, wherein the program code comprises instructions for performing some or all of the steps of any one of the methods of the first aspect.
In a seventh aspect, the present application provides a computer program product for causing a computer to perform some or all of the steps of any one of the methods of the first aspect when the computer program product runs on the computer.
It should be understood that the second to seventh aspects of the present application are consistent with the technical solutions of the first aspect of the present application, and similar advantageous effects are obtained in all aspects and corresponding possible implementations, and thus, detailed descriptions are omitted.
Drawings
In order to more clearly illustrate the technical solutions in the embodiments or the background art of the present application, the drawings required to be used in the embodiments or the background art of the present application will be described below.
FIG. 1A is a block diagram of an example of a video encoding and decoding system 10 for implementing embodiments of the present application;
FIG. 1B is a block diagram of an example of a video coding system 40 for implementing embodiments of the present application;
FIG. 2 is a block diagram of an example structure of an encoder 20 for implementing embodiments of the present application;
FIG. 3 is a block diagram of an example structure of a decoder 30 for implementing embodiments of the present application;
FIG. 4 is a block diagram of an example of a video coding apparatus 400 for implementing an embodiment of the present application;
FIG. 5 is a block diagram of another example of an encoding device or a decoding device for implementing embodiments of the present application;
FIG. 6 is a schematic diagram of a spatial domain and a temporal domain of a current image block in an embodiment of the present application;
FIG. 7A is a diagram of an MMVD search point in an embodiment of the present application;
FIG. 7B is a schematic diagram of an MMVD search process in an embodiment of the present application;
FIG. 8 is a schematic diagram illustrating a division of a current image block in an embodiment of the present application;
FIG. 9 is a first flowchart illustrating an inter-frame prediction method according to an embodiment of the present application;
FIG. 10 is a flowchart illustrating a second inter-frame prediction method according to an embodiment of the present application;
fig. 11 is a schematic structural diagram of an inter prediction apparatus in an embodiment of the present application.
Detailed Description
The embodiments of the present application will be described below with reference to the drawings. In the following description, reference is made to the accompanying drawings which form a part hereof and in which is shown by way of illustration specific aspects of embodiments of the application or in which specific aspects of embodiments of the application may be employed. It should be understood that embodiments of the present application may be used in other ways and may include structural or logical changes not depicted in the drawings. The following detailed description is, therefore, not to be taken in a limiting sense, and the scope of the present application is defined by the appended claims. For example, it should be understood that the disclosure in connection with the described methods may equally apply to the corresponding apparatus or system for performing the methods, and vice versa. For example, if one or more particular method steps are described, the corresponding apparatus may comprise one or more units, such as functional units, to perform the described one or more method steps (e.g., a unit performs one or more steps, or multiple units, each of which performs one or more of the multiple steps), even if such one or more units are not explicitly described or illustrated in the figures. On the other hand, for example, if a particular apparatus is described based on one or more units, such as functional units, the corresponding method may comprise one step to perform the functionality of the one or more units (e.g., one step performs the functionality of the one or more units, or multiple steps, each of which performs the functionality of one or more of the plurality of units), even if such one or more steps are not explicitly described or illustrated in the figures. Further, it is to be understood that features of the various exemplary embodiments and/or aspects described herein may be combined with each other, unless explicitly stated otherwise.
The technical scheme related to the embodiment of the application can be applied to the existing video coding standards (such as H.264, HEVC and the like), and can also be applied to the future video coding standards (such as H.266 standard). The terminology used in the description of the embodiments section of the present application is for the purpose of describing particular embodiments of the present application only and is not intended to be limiting of the present application. Some concepts that may be involved in embodiments of the present application are briefly described below.
Video coding generally refers to processing a sequence of pictures that form a video or video sequence. In the field of video coding, the terms "picture", "frame" or "image" may be used as synonyms. Video encoding as used herein means video encoding or video decoding. Video encoding is performed on the source side, typically including processing (e.g., by compressing) the original video picture to reduce the amount of data required to represent the video picture for more efficient storage and/or transmission. Video decoding is performed at the destination side, typically involving inverse processing with respect to the encoder, to reconstruct the video pictures. Embodiments are directed to video picture "encoding" to be understood as referring to "encoding" or "decoding" of a video sequence. The combination of the encoding part and the decoding part is also called codec (encoding and decoding).
A video sequence comprises a series of images (pictures) which are further divided into slices (slices) which are further divided into blocks (blocks). Video coding performs the coding process in units of blocks, and in some new video coding standards, the concept of blocks is further extended. For example, in the h.264 standard, there is a Macroblock (MB), which may be further divided into a plurality of prediction blocks (partitions) that can be used for predictive coding. In the High Efficiency Video Coding (HEVC) standard, basic concepts such as a Coding Unit (CU), a Prediction Unit (PU), and a Transform Unit (TU) are adopted, and various block units are functionally divided, and a brand new tree-based structure is adopted for description. For example, a video coding standard divides a frame of image into non-overlapping Coding Tree Units (CTUs), and then divides one CTU into a plurality of sub-nodes, which can be divided into smaller sub-nodes according to a Quadtree (QT), and the smaller sub-nodes can be further divided, thereby forming a quadtree structure. If the node is no longer partitioned, it is called a CU. A CU is a basic unit for dividing and encoding an encoded image. There is also a similar tree structure for PU and TU, and PU may correspond to a prediction block, which is the basic unit of predictive coding. The CU is further partitioned into PUs according to a partitioning pattern. A TU may correspond to a transform block, which is a basic unit for transforming a prediction residual. However, CU, PU and TU are basically concepts of blocks (or image blocks).
For example, in HEVC, a CTU is split into multiple CUs by using a quadtree structure represented as a coding tree. A decision is made at the CU level whether to encode a picture region using inter-picture (temporal) or intra-picture (spatial) prediction. Each CU may be further split into one, two, or four PUs according to the PU split type. The same prediction process is applied within one PU and the relevant information is transmitted to the decoder on a PU basis. After obtaining the residual block by applying a prediction process based on the PU split type, the CU may be partitioned into Transform Units (TUs) according to other quadtree structures similar to the coding tree used for the CU. In recent developments of video compression techniques, the coding blocks are partitioned using Quad-tree and binary tree (QTBT) partition frames. In the QTBT block structure, a CU may be square or rectangular in shape.
Herein, for convenience of description and understanding, an image block to be encoded in a currently encoded image may be referred to as a current block, e.g., in encoding, referring to a block currently being encoded; in decoding, refers to the block currently being decoded. A decoded image block in a reference picture used for predicting the current block is referred to as a reference block, i.e. a reference block is a block that provides a reference signal for the current block, wherein the reference signal represents pixel values within the image block. A block in the reference picture that provides a prediction signal for the current block may be a prediction block, wherein the prediction signal represents pixel values or sample values or a sampled signal within the prediction block. For example, after traversing multiple reference blocks, a best reference block is found that will provide prediction for the current block, which is called a prediction block.
In the case of lossless video coding, the original video picture can be reconstructed, i.e., the reconstructed video picture has the same quality as the original video picture (assuming no transmission loss or other data loss during storage or transmission). In the case of lossy video coding, the amount of data needed to represent the video picture is reduced by performing further compression, e.g., by quantization, while the decoder side cannot fully reconstruct the video picture, i.e., the quality of the reconstructed video picture is lower or worse than the quality of the original video picture.
Several video coding standards of h.261 belong to the "lossy hybrid video codec" (i.e., the combination of spatial and temporal prediction in the sample domain with 2D transform coding in the transform domain for applying quantization). Each picture of a video sequence is typically partitioned into non-overlapping sets of blocks, typically encoded at the block level. In other words, the encoder side typically processes, i.e., encodes, video at the block (video block) level, e.g., generates a prediction block by spatial (intra-picture) prediction and temporal (inter-picture) prediction, subtracts the prediction block from the current block (currently processed or block to be processed) to obtain a residual block, transforms the residual block and quantizes the residual block in the transform domain to reduce the amount of data to be transmitted (compressed), while the decoder side applies the inverse processing portion relative to the encoder to the encoded or compressed block to reconstruct the current image block for representation. In addition, the encoder replicates the decoder processing loop such that the encoder and decoder generate the same prediction (e.g., intra-prediction and inter-prediction) and/or reconstruction for processing, i.e., encoding, subsequent blocks.
The system architecture to which the embodiments of the present application apply is described below. Referring to fig. 1A, fig. 1A schematically shows a block diagram of a video encoding and decoding system 10 to which an embodiment of the present application is applied. As shown in fig. 1A, video encoding and decoding system 10 may include a source device 12 and a destination device 14, source device 12 generating encoded video data, and thus source device 12 may be referred to as a video encoding apparatus. Destination device 14 may decode the encoded video data generated by source device 12, and thus destination device 14 may be referred to as a video decoding apparatus. Various implementations of source apparatus 12, destination apparatus 14, or both may include one or more processors and memory coupled to the one or more processors. The memory can include, but is not limited to, RAM, ROM, EEPROM, flash memory, or any other medium that can be used to store desired program code in the form of instructions or data structures that can be accessed by a computer, as described herein. Source apparatus 12 and destination apparatus 14 may comprise a variety of devices, including desktop computers, mobile computing devices, notebook (e.g., laptop) computers, tablet computers, set-top boxes, telephone handsets such as so-called "smart" phones, televisions, cameras, display devices, digital media players, video game consoles, on-board computers, wireless communication devices, or the like.
Although fig. 1A depicts source apparatus 12 and destination apparatus 14 as separate apparatuses, an apparatus embodiment may also include the functionality of both source apparatus 12 and destination apparatus 14 or both, i.e., source apparatus 12 or corresponding functionality and destination apparatus 14 or corresponding functionality. In such embodiments, source device 12 or corresponding functionality and destination device 14 or corresponding functionality may be implemented using the same hardware and/or software, or using separate hardware and/or software, or any combination thereof.
A communication connection may be made between source device 12 and destination device 14 over link 13, and destination device 14 may receive encoded video data from source device 12 via link 13. Link 13 may comprise one or more media or devices capable of moving encoded video data from source apparatus 12 to destination apparatus 14. In one example, link 13 may include one or more communication media that enable source device 12 to transmit encoded video data directly to destination device 14 in real-time. In this example, source apparatus 12 may modulate the encoded video data according to a communication standard, such as a wireless communication protocol, and may transmit the modulated video data to destination apparatus 14. The one or more communication media may include wireless and/or wired communication media such as a Radio Frequency (RF) spectrum or one or more physical transmission lines. The one or more communication media may form part of a packet-based network, such as a local area network, a wide area network, or a global network (e.g., the internet). The one or more communication media may include routers, switches, base stations, or other apparatuses that facilitate communication from source apparatus 12 to destination apparatus 14.
the picture source 16, which may include or be any type of picture capturing device, may be used, for example, to capture real-world pictures, and/or any type of picture or comment generating device (for screen content encoding, some text on the screen is also considered part of the picture or image to be encoded), such as a computer graphics processor for generating computer animated pictures, or any type of device for obtaining and/or providing real-world pictures, computer animated pictures (e.g., screen content, Virtual Reality (VR) pictures), and/or any combination thereof (e.g., Augmented Reality (AR) pictures). The picture source 16 may be a camera for capturing pictures or a memory for storing pictures, and the picture source 16 may also include any kind of (internal or external) interface for storing previously captured or generated pictures and/or for obtaining or receiving pictures. When picture source 16 is a camera, picture source 16 may be, for example, an integrated camera local or integrated in the source device; when the picture source 16 is a memory, the picture source 16 may be an integrated memory local or integrated, for example, in the source device. When the picture source 16 comprises an interface, the interface may for example be an external interface receiving pictures from an external video source, for example an external picture capturing device such as a camera, an external memory or an external picture generating device, for example an external computer graphics processor, a computer or a server. The interface may be any kind of interface according to any proprietary or standardized interface protocol, e.g. a wired or wireless interface, an optical interface.
The picture can be regarded as a two-dimensional array or matrix of pixel elements (picture elements). The pixels in the array may also be referred to as sampling points. The number of sampling points of the array or picture in the horizontal and vertical directions (or axes) defines the size and/or resolution of the picture. To represent color, three color components are typically employed, i.e., a picture may be represented as or contain three sample arrays. For example, in RBG format or color space, a picture includes corresponding arrays of red, green, and blue samples. However, in video coding, each pixel is typically represented in a luminance/chrominance format or color space, e.g. for pictures in YUV format, comprising a luminance component (sometimes also indicated with L) indicated by Y and two chrominance components indicated by U and V. The luminance (luma) component Y represents luminance or gray level intensity (e.g., both are the same in a gray scale picture), while the two chrominance (chroma) components U and V represent chrominance or color information components. Accordingly, a picture in YUV format includes a luma sample array of luma sample values (Y), and two chroma sample arrays of chroma values (U and V). Pictures in RGB format can be converted or transformed into YUV format and vice versa, a process also known as color transformation or conversion. If the picture is black and white, the picture may include only an array of luminance samples. In the embodiment of the present application, the pictures transmitted from the picture source 16 to the picture processor may also be referred to as raw picture data 17.
An encoder 20 (or video encoder 20) for receiving the pre-processed picture data 19, processing the pre-processed picture data 19 with a relevant prediction mode (such as the prediction mode in various embodiments herein), thereby providing encoded picture data 21 (structural details of the encoder 20 will be described further below based on fig. 2 or fig. 4 or fig. 5). In some embodiments, the encoder 20 may be configured to perform various embodiments described hereinafter to implement the application of the chroma block prediction method described in the embodiments of the present application on the encoding side.
A communication interface 22, which may be used to receive encoded picture data 21 and may transmit encoded picture data 21 over link 13 to destination device 14 or any other device (e.g., memory) for storage or direct reconstruction, which may be any device for decoding or storage. Communication interface 22 may, for example, be used to encapsulate encoded picture data 21 into a suitable format, such as a data packet, for transmission over link 13.
Destination device 14 includes a decoder 30, and optionally destination device 14 may also include a communication interface 28, a picture post-processor 32, and a display device 34. Described below, respectively:
Both communication interface 28 and communication interface 22 may be configured as a one-way communication interface or a two-way communication interface, and may be used, for example, to send and receive messages to establish a connection, acknowledge and exchange any other information related to a communication link and/or data transfer, such as an encoded picture data transfer.
A decoder 30 (otherwise referred to as decoder 30) for receiving the encoded picture data 21 and providing decoded picture data 31 or decoded pictures 31 (structural details of the decoder 30 will be described further below based on fig. 3 or fig. 4 or fig. 5). In some embodiments, the decoder 30 may be configured to perform various embodiments described hereinafter to implement the application of the chroma block prediction method described in the embodiments of the present application on the decoding side.
A picture post-processor 32 for performing post-processing on the decoded picture data 31 (also referred to as reconstructed picture data) to obtain post-processed picture data 33. Post-processing performed by picture post-processor 32 may include: color format conversion (e.g., from YUV format to RGB format), toning, trimming or resampling, or any other process may also be used to transmit post-processed picture data 33 to display device 34.
A display device 34 for receiving the post-processed picture data 33 for displaying pictures to, for example, a user or viewer. Display device 34 may be or may include any type of display for presenting the reconstructed picture, such as an integrated or external display or monitor. For example, the display may include a Liquid Crystal Display (LCD), an Organic Light Emitting Diode (OLED) display, a plasma display, a projector, a micro LED display, a liquid crystal on silicon (LCoS), a Digital Light Processor (DLP), or any other display of any kind.
Although fig. 1A depicts source device 12 and destination device 14 as separate devices, device embodiments may also include the functionality of both source device 12 and destination device 14 or both, i.e., source device 12 or corresponding functionality and destination device 14 or corresponding functionality. In such embodiments, source device 12 or corresponding functionality and destination device 14 or corresponding functionality may be implemented using the same hardware and/or software, or using separate hardware and/or software, or any combination thereof.
It will be apparent to those skilled in the art from this description that the existence and (exact) division of the functionality of the different elements, or source device 12 and/or destination device 14 as shown in fig. 1A, may vary depending on the actual device and application. Source device 12 and destination device 14 may comprise any of a variety of devices, including any type of handheld or stationary device, such as a notebook or laptop computer, a mobile phone, a smartphone, a tablet or tablet computer, a camcorder, a desktop computer, a set-top box, a television, a camera, an in-vehicle device, a display device, a digital media player, a video game console, a video streaming device (e.g., a content service server or a content distribution server), a broadcast receiver device, a broadcast transmitter device, etc., and may not use or use any type of operating system.
Both encoder 20 and decoder 30 may be implemented as any of a variety of suitable circuits, such as one or more microprocessors, Digital Signal Processors (DSPs), application-specific integrated circuits (ASICs), field-programmable gate arrays (FPGAs), discrete logic, hardware, or any combinations thereof. If the techniques are implemented in part in software, an apparatus may store instructions of the software in a suitable non-transitory computer-readable storage medium and may execute the instructions in hardware using one or more processors to perform the techniques of this disclosure. Any of the foregoing, including hardware, software, a combination of hardware and software, etc., may be considered one or more processors.
In some cases, the video encoding and decoding system 10 shown in fig. 1A is merely an example, and the techniques of embodiments of the present application may be applied to video encoding settings (e.g., video encoding or video decoding) that do not necessarily involve any data communication between the encoding and decoding devices. In other examples, the data may be retrieved from local storage, streamed over a network, and so on. A video encoding device may encode and store data to a memory, and/or a video decoding device may retrieve and decode data from a memory. In some examples, the encoding and decoding are performed by devices that do not communicate with each other, but merely encode data to and/or retrieve data from memory and decode data.
Referring to fig. 1B, fig. 1B is an illustrative diagram of an example of a video coding system 40 including the encoder 20 of fig. 2 and/or the decoder 30 of fig. 3, according to an example embodiment. Video coding system 40 may implement a combination of the various techniques of the embodiments of the present application. In the illustrated embodiment, video coding system 40 may include an imaging device 41, an encoder 20, a decoder 30 (and/or a video codec implemented by logic 47 of a processing unit 46), an antenna 42, one or more processors 43, one or more memories 44, and/or a display device 45.
As shown in fig. 1B, the imaging device 41, the antenna 42, the processing unit 46, the logic circuit 47, the encoder 20, the decoder 30, the processor 43, the memory 44, and/or the display device 45 can communicate with each other. As discussed, although video coding system 40 is depicted with encoder 20 and decoder 30, in different examples video coding system 40 may include only encoder 20 or only decoder 30.
In some instances, antenna 42 may be used to transmit or receive an encoded bitstream of video data. Additionally, in some instances, display device 45 may be used to present video data. In some examples, logic 47 may be implemented by processing unit 46. The processing unit 46 may comprise application-specific integrated circuit (ASIC) logic, a graphics processor, a general-purpose processor, or the like. Video decoding system 40 may also include an optional processor 43, which optional processor 43 similarly may include application-specific integrated circuit (ASIC) logic, a graphics processor, a general-purpose processor, or the like. In some examples, the logic 47 may be implemented in hardware, such as video encoding specific hardware, and the processor 43 may be implemented in general purpose software, an operating system, and so on. In addition, the memory 44 may be any type of memory, such as a volatile memory (e.g., Static Random Access Memory (SRAM), Dynamic Random Access Memory (DRAM), etc.) or a non-volatile memory (e.g., flash memory, etc.), and so on. In a non-limiting example, storage 44 may be implemented by a speed cache memory. In some instances, logic circuitry 47 may access memory 44 (e.g., to implement an image buffer). In other examples, logic 47 and/or processing unit 46 may include memory (e.g., cache, etc.) for implementing image buffers, etc.
In some examples, encoder 20, implemented by logic circuitry, may include an image buffer (e.g., implemented by processing unit 46 or memory 44) and a graphics processing unit (e.g., implemented by processing unit 46). The graphics processing unit may be communicatively coupled to the image buffer. The graphics processing unit may include an encoder 20 implemented by logic circuitry 47 to implement the various modules discussed with reference to fig. 2 and/or any other encoder system or subsystem described herein. Logic circuitry may be used to perform various operations discussed herein.
In some examples, decoder 30 may be implemented by logic circuitry 47 in a similar manner to implement the various modules discussed with reference to decoder 30 of fig. 3 and/or any other decoder system or subsystem described herein. In some examples, logic circuit implemented decoder 30 may include an image buffer (implemented by processing unit 43 or memory 44) and a graphics processing unit (e.g., implemented by processing unit 46). The graphics processing unit may be communicatively coupled to the image buffer. The graphics processing unit may include a decoder 30 implemented by logic circuitry 47 to implement the various modules discussed with reference to fig. 3 and/or any other decoder system or subsystem described herein.
In some instances, antenna 42 may be used to receive an encoded bitstream of video data. As discussed, the encoded bitstream may include data related to the encoded video frame, indicators, index values, mode selection data, etc., discussed herein, such as data related to the encoding partition (e.g., transform coefficients or quantized transform coefficients, (as discussed) optional indicators, and/or data defining the encoding partition). Video coding system 40 may also include a decoder 30 coupled to antenna 42 and used to decode the encoded bitstream. The display device 45 is used to present video frames.
It should be understood that for the example described with reference to encoder 20 in the embodiments of the present application, decoder 30 may be used to perform the reverse process. With respect to signaling prediction parameters, decoder 30 may be configured to receive and parse such prediction parameters and decode the associated video data accordingly. In some examples, encoder 20 may entropy encode the prediction parameters into an encoded video bitstream. In such instances, decoder 30 may parse such prediction parameters and decode the relevant video data accordingly.
It should be noted that the optimization processing method for the fused motion vector difference technique described in the embodiment of the present application is mainly used for an inter-frame prediction process, which exists in both the encoder 20 and the decoder 30, and the encoder 20 and the decoder 30 in the embodiment of the present application may be a video standard protocol such as h.263, h.264, HEVV, MPEG-2, MPEG-4, VP8, VP9, or a codec corresponding to a next-generation video standard protocol (e.g., h.266).
Referring to fig. 2, fig. 2 shows a schematic/conceptual block diagram of an example of an encoder 20 for implementing embodiments of the present application. In the example of fig. 2, encoder 20 includes a residual calculation unit 204, a transform processing unit 206, a quantization unit 208, an inverse quantization unit 210, an inverse transform processing unit 212, a reconstruction unit 214, a buffer 216, a loop filter unit 220, a Decoded Picture Buffer (DPB) 230, a prediction processing unit 260, and an entropy encoding unit 270. Prediction processing unit 260 may include inter prediction unit 244, intra prediction unit 254, and mode selection unit 262. Inter prediction unit 244 may include a motion estimation unit and a motion compensation unit (not shown). The encoder 20 shown in fig. 2 may also be referred to as a hybrid video encoder or a video encoder according to a hybrid video codec.
For example, the residual calculation unit 204, the transform processing unit 206, the quantization unit 208, the prediction processing unit 260, and the entropy encoding unit 270 form a forward signal path of the encoder 20, and, for example, the inverse quantization unit 210, the inverse transform processing unit 212, the reconstruction unit 214, the buffer 216, the loop filter 220, the Decoded Picture Buffer (DPB) 230, the prediction processing unit 260 form a backward signal path of the encoder, wherein the backward signal path of the encoder corresponds to a signal path of a decoder (see the decoder 30 in fig. 3).
The encoder 20 receives, e.g., via an input 202, a picture 201 or an image block 203 of a picture 201, e.g., a picture in a sequence of pictures forming a video or a video sequence. Image block 203 may also be referred to as a current picture block or a picture block to be encoded, and picture 201 may be referred to as a current picture or a picture to be encoded (especially when the current picture is distinguished from other pictures in video encoding, such as previously encoded and/or decoded pictures in the same video sequence, i.e., a video sequence that also includes the current picture).
An embodiment of the encoder 20 may comprise a partitioning unit (not shown in fig. 2) for partitioning the picture 201 into a plurality of blocks, e.g. image blocks 203, typically into a plurality of non-overlapping blocks. The partitioning unit may be used to use the same block size for all pictures in a video sequence and a corresponding grid defining the block size, or to alter the block size between pictures or subsets or groups of pictures and partition each picture into corresponding blocks.
In one example, prediction processing unit 260 of encoder 20 may be used to perform any combination of the above-described segmentation techniques.
Like picture 201, image block 203 is also or can be considered as a two-dimensional array or matrix of sample points having sample values, although its size is smaller than picture 201. In other words, the image block 203 may comprise, for example, one sample array (e.g., a luma array in the case of a black and white picture 201) or three sample arrays (e.g., a luma array and two chroma arrays in the case of a color picture) or any other number and/or class of arrays depending on the color format applied. The number of sampling points in the horizontal and vertical directions (or axes) of the image block 203 defines the size of the image block 203.
The encoder 20 as shown in fig. 2 is used to encode a picture 201 block by block, e.g. performing encoding and prediction for each image block 203.
The residual calculation unit 204 is configured to calculate a residual block 205 based on the picture image block 203 and the prediction block 265 (further details of the prediction block 265 are provided below), e.g. by subtracting sample values of the prediction block 265 from sample values of the picture image block 203 sample by sample (pixel by pixel) to obtain the residual block 205 in the sample domain.
The transform processing unit 206 is configured to apply a transform, such as a Discrete Cosine Transform (DCT) or a Discrete Sine Transform (DST), on the sample values of the residual block 205 to obtain transform coefficients 207 in a transform domain. The transform coefficients 207 may also be referred to as transform residual coefficients and represent the residual block 205 in the transform domain.
The transform processing unit 206 may be used to apply integer approximations of DCT/DST, such as the transform specified for HEVC/h.265. Such integer approximations are typically scaled by some factor compared to the orthogonal DCT transform. To maintain the norm of the residual block processed by the forward transform and the inverse transform, an additional scaling factor is applied as part of the transform process. The scaling factor is typically selected based on certain constraints, e.g., the scaling factor is a power of 2 for a shift operation, a trade-off between bit depth of transform coefficients, accuracy and implementation cost, etc. For example, a specific scaling factor may be specified on the decoder 30 side for the inverse transform by, for example, inverse transform processing unit 212 (and on the encoder 20 side for the corresponding inverse transform by, for example, inverse transform processing unit 212), and correspondingly, a corresponding scaling factor may be specified on the encoder 20 side for the forward transform by transform processing unit 206.
The inverse quantization unit 210 is configured to apply inverse quantization of the quantization unit 208 on the quantized coefficients to obtain inverse quantized coefficients 211, e.g., to apply an inverse quantization scheme of the quantization scheme applied by the quantization unit 208 based on or using the same quantization step as the quantization unit 208. The dequantized coefficients 211 may also be referred to as dequantized residual coefficients 211, corresponding to transform coefficients 207, although the loss due to quantization is typically not the same as the transform coefficients.
The inverse transform processing unit 212 is configured to apply an inverse transform of the transform applied by the transform processing unit 206, for example, an inverse Discrete Cosine Transform (DCT) or an inverse Discrete Sine Transform (DST), to obtain an inverse transform block 213 in the sample domain. The inverse transform block 213 may also be referred to as an inverse transform dequantized block 213 or an inverse transform residual block 213.
The reconstruction unit 214 (e.g., summer 214) is used to add the inverse transform block 213 (i.e., the reconstructed residual block 213) to the prediction block 265 to obtain the reconstructed block 215 in the sample domain, e.g., to add sample values of the reconstructed residual block 213 to sample values of the prediction block 265.
Optionally, a buffer unit 216 (or simply "buffer" 216), such as a line buffer 216, is used to buffer or store the reconstructed block 215 and corresponding sample values, for example, for intra prediction. In other embodiments, the encoder may be used to use the unfiltered reconstructed block and/or corresponding sample values stored in buffer unit 216 for any class of estimation and/or prediction, such as intra prediction.
For example, an embodiment of encoder 20 may be configured such that buffer unit 216 is used not only to store reconstructed blocks 215 for intra prediction 254, but also for loop filter unit 220 (not shown in fig. 2), and/or such that buffer unit 216 and decoded picture buffer unit 230 form one buffer, for example. Other embodiments may be used to use filtered block 221 and/or blocks or samples from decoded picture buffer 230 (neither shown in fig. 2) as input or basis for intra prediction 254.
The loop filter unit 220 (or simply "loop filter" 220) is used to filter the reconstructed block 215 to obtain a filtered block 221, so as to facilitate pixel transition or improve video quality. Loop filter unit 220 is intended to represent one or more loop filters, such as a deblocking filter, a sample-adaptive offset (SAO) filter, or other filters, such as a bilateral filter, an Adaptive Loop Filter (ALF), or a sharpening or smoothing filter, or a collaborative filter. Although loop filter unit 220 is shown in fig. 2 as an in-loop filter, in other configurations, loop filter unit 220 may be implemented as a post-loop filter. The filtered block 221 may also be referred to as a filtered reconstructed block 221. The decoded picture buffer 230 may store the reconstructed encoded block after the loop filter unit 220 performs a filtering operation on the reconstructed encoded block.
Embodiments of encoder 20 (correspondingly, loop filter unit 220) may be configured to output loop filter parameters (e.g., sample adaptive offset information), e.g., directly or after entropy encoding by entropy encoding unit 270 or any other entropy encoding unit, e.g., such that decoder 30 may receive and apply the same loop filter parameters for decoding.
Decoded Picture Buffer (DPB) 230 may be a reference picture memory that stores reference picture data for use by encoder 20 in encoding video data. DPB 230 may be formed from any of a variety of memory devices, such as Dynamic Random Access Memory (DRAM) including Synchronous DRAM (SDRAM), Magnetoresistive RAM (MRAM), Resistive RAM (RRAM), or other types of memory devices. The DPB 230 and the buffer 216 may be provided by the same memory device or separate memory devices. In a certain example, a Decoded Picture Buffer (DPB) 230 is used to store filtered blocks 221. Decoded picture buffer 230 may further be used to store other previous filtered blocks, such as previous reconstructed and filtered blocks 221, of the same current picture or of a different picture, such as a previous reconstructed picture, and may provide the complete previous reconstructed, i.e., decoded picture (and corresponding reference blocks and samples) and/or the partially reconstructed current picture (and corresponding reference blocks and samples), e.g., for inter prediction. In a certain example, if reconstructed block 215 is reconstructed without in-loop filtering, Decoded Picture Buffer (DPB) 230 is used to store reconstructed block 215.
Prediction processing unit 260, also referred to as block prediction processing unit 260, is used to receive or obtain image block 203 (current image block 203 of current picture 201) and reconstructed picture data, e.g., reference samples of the same (current) picture from buffer 216 and/or reference picture data 231 of one or more previously decoded pictures from decoded picture buffer 230, and to process such data for prediction, i.e., to provide prediction block 265, which may be inter-predicted block 245 or intra-predicted block 255.
The mode selection unit 262 may be used to select a prediction mode (e.g., intra or inter prediction mode) and/or a corresponding prediction block 245 or 255 used as the prediction block 265 to calculate the residual block 205 and reconstruct the reconstructed block 215.
Embodiments of mode selection unit 262 may be used to select prediction modes (e.g., from those supported by prediction processing unit 260) that provide the best match or the smallest residual (smallest residual means better compression in transmission or storage), or that provide the smallest signaling overhead (smallest signaling overhead means better compression in transmission or storage), or both. The mode selection unit 262 may be configured to determine a prediction mode based on Rate Distortion Optimization (RDO), i.e., select a prediction mode that provides the minimum rate distortion optimization, or select a prediction mode in which the associated rate distortion at least meets the prediction mode selection criteria.
The prediction processing performed by the example of the encoder 20 (e.g., by the prediction processing unit 260) and the mode selection performed (e.g., by the mode selection unit 262) will be explained in detail below.
As described above, the encoder 20 is configured to determine or select the best or optimal prediction mode from a set of (predetermined) prediction modes. The prediction mode set may include, for example, intra prediction modes and/or inter prediction modes.
The intra prediction mode set may include 35 different intra prediction modes, for example, non-directional modes such as DC (or mean) mode and planar mode, or directional modes as defined in h.265, or may include 67 different intra prediction modes, for example, non-directional modes such as DC (or mean) mode and planar mode, or directional modes as defined in h.266 under development.
In possible implementations, the set of inter prediction modes may include, for example, an Advanced Motion Vector (AMVP) mode and a merge (merge) mode depending on available reference pictures (i.e., at least partially decoded pictures stored in the DBP230, for example, as described above) and other inter prediction parameters, for example, depending on whether the entire reference picture or only a portion of the reference picture, such as a search window region of a region surrounding the current block, is used to search for a best matching reference block, and/or depending on whether pixel interpolation, such as half-pixel and/or quarter-pixel interpolation, is applied, for example. In a specific implementation, the inter prediction mode set may include an improved control point-based AMVP mode and an improved control point-based merge mode according to an embodiment of the present application. In one example, intra-prediction unit 254 may be used to perform any combination of the inter-prediction techniques described below.
In addition to the above prediction mode, embodiments of the present application may also apply a skip (skip) mode and/or a direct mode.
The prediction processing unit 260 may further be configured to partition the image block 203 into smaller block partitions or sub-blocks, for example, by iteratively using quad-tree (QT) partitions, binary-tree (BT) partitions, or triple-tree (TT) partitions, or any combination thereof, and to perform prediction, for example, for each of the block partitions or sub-blocks, wherein mode selection includes selecting a tree structure of the partitioned image block 203 and selecting a prediction mode to apply to each of the block partitions or sub-blocks.
The inter prediction unit 244 may include a Motion Estimation (ME) unit (not shown in fig. 2) and a Motion Compensation (MC) unit (not shown in fig. 2). The motion estimation unit is used to receive or obtain a picture image block 203 (current picture image block 203 of current picture 201) and a decoded picture 231, or at least one or more previously reconstructed blocks, e.g., reconstructed blocks of one or more other/different previously decoded pictures 231, for motion estimation. For example, the video sequence may comprise a current picture and a previously decoded picture 31, or in other words, the current picture and the previously decoded picture 31 may be part of, or form, a sequence of pictures forming the video sequence.
For example, the encoder 20 may be configured to select a reference block from a plurality of reference blocks of the same or different one of a plurality of other pictures and provide the reference picture and/or an offset (spatial offset) between a position (X, Y coordinates) of the reference block and a position of the current block to a motion estimation unit (not shown in fig. 2) as an inter prediction parameter. This offset is also called a Motion Vector (MV).
The motion compensation unit is configured to obtain inter-prediction parameters and perform inter-prediction based on or using the inter-prediction parameters to obtain an inter-prediction block 245. The motion compensation performed by the motion compensation unit (not shown in fig. 2) may involve taking or generating a prediction block based on a motion/block vector determined by motion estimation (possibly performing interpolation to sub-pixel precision). Interpolation filtering may generate additional pixel samples from known pixel samples, potentially increasing the number of candidate prediction blocks that may be used to encode a picture block. Upon receiving the motion vector for the PU of the current picture block, motion compensation unit 246 may locate the prediction block in one reference picture list to which the motion vector points. Motion compensation unit 246 may also generate prediction parameters associated with the block and the video slice for use by decoder 30 in decoding a picture block of the video slice.
Specifically, the inter prediction unit 244 may transmit prediction parameters including inter prediction parameters (e.g., indication information for selecting an inter prediction mode for current block prediction after traversing a plurality of inter prediction modes) to the entropy encoding unit 270. In a possible application scenario, if there is only one inter prediction mode, the inter prediction parameters may not be carried in the prediction parameters, and the decoding end 30 may directly use the default prediction mode for decoding. It will be appreciated that the inter prediction unit 244 may be used to perform any combination of inter prediction techniques.
The intra prediction unit 254 is used to obtain, for example, a picture block 203 (current picture block) of the same picture and one or more previously reconstructed blocks, e.g., reconstructed neighboring blocks, to be received for intra estimation. For example, the encoder 20 may be configured to select an intra-prediction mode from a plurality of (predetermined) intra-prediction modes.
Embodiments of encoder 20 may be used to select an intra prediction mode based on optimization criteria, such as based on a minimum residual (e.g., an intra prediction mode that provides a prediction block 255 that is most similar to current picture block 203) or a minimum code rate distortion.
The intra-prediction unit 254 is further configured to determine the intra-prediction block 255 based on the intra-prediction parameters as the selected intra-prediction mode. In any case, after selecting the intra-prediction mode for the block, intra-prediction unit 254 is also used to provide intra-prediction parameters, i.e., information indicating the selected intra-prediction mode for the block, to entropy encoding unit 270. In one example, intra-prediction unit 254 may be used to perform any combination of intra-prediction techniques.
Specifically, the intra prediction unit 254 may transmit the prediction parameters including the intra prediction parameters (e.g., indication information for selecting the intra prediction mode for the current block prediction after traversing a plurality of intra prediction modes) to the entropy encoding unit 270. In a possible application scenario, if there is only one intra-prediction mode, the intra-prediction parameters may not be carried in the prediction parameters, and the decoding end 30 may directly use the default prediction mode for decoding.
Other structural variations of video encoder 20 may be used to encode the video stream. For example, the non-transform based encoder 20 may quantize the residual signal directly without the transform processing unit 206 for certain blocks or frames. In another embodiment, encoder 20 may have quantization unit 208 and inverse quantization unit 210 combined into a single unit.
Specifically, in the embodiment of the present application, the encoder 20 may be used to implement an optimization processing method for the fused motion vector difference technique described in the embodiments below.
It should be understood that other structural variations of the video encoder 20 may be used to encode the video stream. For example, for some image blocks or image frames, video encoder 20 may quantize the residual signal directly without processing by transform processing unit 206 and, correspondingly, without processing by inverse transform processing unit 212; alternatively, for some image blocks or image frames, the video encoder 20 does not generate residual data and accordingly does not need to be processed by the transform processing unit 206, the quantization unit 208, the inverse quantization unit 210, and the inverse transform processing unit 212; alternatively, video encoder 20 may store the reconstructed image block directly as a reference block without processing by filter 220; alternatively, the quantization unit 208 and the inverse quantization unit 210 in the video encoder 20 may be merged together. The loop filter 220 is optional, and in the case of lossless compression coding, the transform processing unit 206, the quantization unit 208, the inverse quantization unit 210, and the inverse transform processing unit 212 are optional. It should be appreciated that the inter prediction unit 244 and the intra prediction unit 254 may be selectively enabled according to different application scenarios.
Referring to fig. 3, fig. 3 shows a schematic/conceptual block diagram of an example of a decoder 30 for implementing embodiments of the present application. Video decoder 30 is operative to receive encoded picture data (e.g., an encoded bitstream) 21, e.g., encoded by encoder 20, to obtain a decoded picture 231. During the decoding process, video decoder 30 receives video data, such as an encoded video bitstream representing picture blocks of an encoded video slice and associated prediction parameters, from video encoder 20.
In the example of fig. 3, decoder 30 includes entropy decoding unit 304, inverse quantization unit 310, inverse transform processing unit 312, reconstruction unit 314 (e.g., summer 314), buffer 316, loop filter 320, decoded picture buffer 330, and prediction processing unit 360. The prediction processing unit 360 may include an inter prediction unit 344, an intra prediction unit 354, and a mode selection unit 362. In some examples, video decoder 30 may perform a decoding pass that is substantially reciprocal to the encoding pass described with reference to video encoder 20 of fig. 2.
Entropy decoding unit 304 is to perform entropy decoding on encoded picture data 21 to obtain, for example, quantized coefficients 309 and/or decoded encoding parameters (not shown in fig. 3), e.g., any or all of inter prediction, intra prediction parameters, loop filter parameters, and/or other prediction parameters (decoded). The entropy decoding unit 304 is further configured to forward the inter-prediction parameters, the intra-prediction parameters, and/or other prediction parameters to the prediction processing unit 360. Video decoder 30 may receive prediction parameters at the video slice level and/or the video block level.
When the video slice is encoded as an intra-coded (I) slice, intra-prediction unit 354 of prediction processing unit 360 is used to generate a prediction block 365 for the picture block of the current video slice based on the signaled intra-prediction mode and data from previously decoded blocks of the current frame or picture. When a video frame is encoded as an inter-coded (i.e., B or P) slice, inter prediction unit 344 (e.g., a motion compensation unit) of prediction processing unit 360 is used to generate a prediction block 365 for the video block of the current video slice based on the motion vectors and other prediction parameters received from entropy decoding unit 304. For inter prediction, a prediction block may be generated from one reference picture within one reference picture list. Video decoder 30 may construct the reference frame list using default construction techniques based on the reference pictures stored in DPB 330: list 0 and list 1.
Inverse transform processing unit 312 is used to apply an inverse transform (e.g., an inverse DCT, an inverse integer transform, or a conceptually similar inverse transform process) to the transform coefficients in order to produce a block of residuals in the pixel domain.
The reconstruction unit 314 (e.g., summer 314) is used to add the inverse transform block 313 (i.e., reconstructed residual block 313) to the prediction block 365 to obtain the reconstructed block 315 in the sample domain, e.g., by adding sample values of the reconstructed residual block 313 to sample values of the prediction block 365.
Loop filter unit 320 (either during or after the encoding cycle) is used to filter reconstructed block 315 to obtain filtered block 321 to facilitate pixel transitions or improve video quality. In one example, loop filter unit 320 may be used to perform any combination of the filtering techniques described below. Loop filter unit 320 is intended to represent one or more loop filters, such as a deblocking filter, a sample-adaptive offset (SAO) filter, or other filters, such as a bilateral filter, an Adaptive Loop Filter (ALF), or a sharpening or smoothing filter, or a collaborative filter. Although loop filter unit 320 is shown in fig. 3 as an in-loop filter, in other configurations, loop filter unit 320 may be implemented as a post-loop filter.
Decoded video block 321 in a given frame or picture is then stored in decoded picture buffer 330, which stores reference pictures for subsequent motion compensation.
Other variations of video decoder 30 may be used to decode the compressed bitstream. For example, decoder 30 may generate an output video stream without loop filter unit 320. For example, the non-transform based decoder 30 may directly inverse quantize the residual signal without the inverse transform processing unit 312 for certain blocks or frames. In another embodiment, video decoder 30 may have inverse quantization unit 310 and inverse transform processing unit 312 combined into a single unit.
Specifically, in the embodiment of the present application, the decoder 30 is configured to implement the optimization processing method for the fused motion vector difference technique described in the embodiments below.
It should be understood that other structural variations of the video decoder 30 may be used to decode the encoded video bitstream. For example, video decoder 30 may generate an output video stream without processing by filter 320; alternatively, for some image blocks or image frames, the quantized coefficients are not decoded by entropy decoding unit 304 of video decoder 30 and, accordingly, do not need to be processed by inverse quantization unit 310 and inverse transform processing unit 312. Loop filter 320 is optional; and the inverse quantization unit 310 and the inverse transform processing unit 312 are optional for the case of lossless compression. It should be understood that the inter prediction unit and the intra prediction unit may be selectively enabled according to different application scenarios.
It should be understood that, in the encoder 20 and the decoder 30 according to the embodiment of the present application, the processing result of a certain link may be further processed and then output to the next link, for example, after the links such as interpolation filtering, motion vector derivation, or loop filtering, the processing result of the corresponding link is further subjected to operations such as Clip or shift.
For example, the motion vector of the control point of the current image block derived according to the motion vector of the adjacent affine coding block, or the derived motion vector of the sub-block of the current image block may be further processed, which is not limited in this embodiment of the present application. For example, the value range of the motion vector is constrained to be within a certain bit width. Assuming that the allowable bit width of the motion vector is bitDepth, the range of the motion vector is-2bitDepth-1~2bitDepth-1-1. And if the bitDepth is 16, the value range is-32768-32767. And if the bitDepth is 18, the value range is-131072-131071. As another example, the value of the motion vector (e.g., the motion vector MV of four 4 × 4 sub-blocks within an 8 × 8 image block) is constrained such that the maximum difference between the integer parts of the four 4 × 4 sub-blocks MV does not exceed N pixels, e.g., does not exceed one pixel.
It can be constrained to within a certain bit width in two ways:
ux=(vx+2bitDepth)%2bitDepth
vx=(ux≥2bitDepth-1)?(ux-2bitDepth):ux
uy=(vy+2bitDepth)%2bitDepth
vy=(uy≥2bitDepth-1)?(uy-2bitDepth):uy
wherein vx is a horizontal component of a motion vector of the image block or a sub-block of the image block, vy is a vertical component of the motion vector of the image block or the sub-block of the image block, and ux and uy are median values; bitDepth represents the bit width.
For example, vx has a value of-32769, which is obtained by the above equation of 32767. Since in the computer the value is stored in binary's complement, -32769's complement is 1,0111,1111,1111,1111(17 bits), the computer processes the overflow to discard the high bits, the value of vx is 0111,1111,1111,1111, then 32767, consistent with the results obtained by the formula processing.
vx=Clip3(-2bitDepth-1,2bitDepth-1-1,vx)
vy=Clip3(-2bitDepth-1,2bitDepth-1-1,vy)
wherein vx is the horizontal component of the motion vector of the image block or a sub-block of the image block, vy is the vertical component of the motion vector of the image block or a sub-block of the image block; wherein x, y and z respectively correspond to three input values of the MV clamping process Clip3, and the Clip3 is defined to indicate that the value of z is clamped between the intervals [ x, y ]:

referring to fig. 4, fig. 4 is a schematic structural diagram of a video coding apparatus 400 (e.g., a video encoding apparatus 400 or a video decoding apparatus 400) provided by an embodiment of the present application. Video coding apparatus 400 is suitable for implementing the embodiments described herein. In one embodiment, video coding device 400 may be a video decoder (e.g., decoder 30 of fig. 1A) or a video encoder (e.g., encoder 20 of fig. 1A). In another embodiment, video coding device 400 may be one or more components of decoder 30 of fig. 1A or encoder 20 of fig. 1A described above.
The processor 430 is implemented by hardware and software. Processor 430 may be implemented as one or more CPU chips, cores (e.g., multi-core processors), FPGAs, ASICs, and DSPs. Processor 430 is in communication with inlet port 410, receiver unit 420, transmitter unit 440, outlet port 450, and memory 460. Processor 430 includes a coding module 470 (e.g., encoding module 470 or decoding module 470). The encoding/decoding module 470 implements embodiments disclosed herein to implement the chroma block prediction methods provided by embodiments of the present application. For example, the encoding/decoding module 470 implements, processes, or provides various encoding operations. Accordingly, substantial improvements are provided to the functionality of the video coding apparatus 400 by the encoding/decoding module 470 and affect the transition of the video coding apparatus 400 to different states. Alternatively, the encode/decode module 470 is implemented as instructions stored in the memory 460 and executed by the processor 430.
The memory 460, which may include one or more disks, tape drives, and solid state drives, may be used as an over-flow data storage device for storing programs when such programs are selectively executed, and for storing instructions and data that are read during program execution. The memory 460 may be volatile and/or nonvolatile, and may be Read Only Memory (ROM), Random Access Memory (RAM), random access memory (TCAM), and/or Static Random Access Memory (SRAM).
Referring to fig. 5, fig. 5 is a simplified block diagram of an apparatus 500 that may be used as either or both of source device 12 and destination device 14 in fig. 1A according to an example embodiment. Apparatus 500 may implement the techniques of embodiments of the present application. In other words, fig. 5 is a schematic block diagram of an implementation manner of an encoding apparatus or a decoding apparatus (simply referred to as a decoding apparatus 500) of the embodiment of the present application. Among other things, the decoding device 500 may include a processor 510, a memory 530, and a bus system 550. Wherein the processor is connected with the memory through the bus system, the memory is used for storing instructions, and the processor is used for executing the instructions stored by the memory. The memory of the coding device stores program code, and the processor may call the program code stored in the memory to perform various video encoding or decoding methods described in embodiments of the present application. To avoid repetition, it is not described in detail here.
In the embodiment of the present application, the processor 510 may be a Central Processing Unit (CPU), and the processor 510 may also be other general-purpose processors, Digital Signal Processors (DSPs), Application Specific Integrated Circuits (ASICs), Field Programmable Gate Arrays (FPGAs) or other programmable logic devices, discrete gate or transistor logic devices, discrete hardware components, or the like. A general purpose processor may be a microprocessor or the processor may be any conventional processor or the like.
The memory 530 may include a Read Only Memory (ROM) device or a Random Access Memory (RAM) device. Any other suitable type of memory device may also be used for memory 530. Memory 530 may include code and data 531 to be accessed by processor 510 using bus 550. Memory 530 may further include an operating system 533 and application programs 535, the application programs 535 including at least one program that allows processor 510 to perform the video encoding or decoding methods described in embodiments of the present application, and in particular the optimization processing methods for the fused motion vector difference technique described in embodiments of the present application. For example, the application programs 535 may include applications 1 to N, which further include a video encoding or decoding application (simply referred to as a video coding application) that performs the video encoding or decoding method described in the embodiments of the present application.
The bus system 550 may include a power bus, a control bus, a status signal bus, and the like, in addition to a data bus. For clarity of illustration, however, the various buses are designated in the figure as bus system 550.
Optionally, the translator device 500 may also include one or more output devices, such as a display 570. In one example, the display 570 may be a touch-sensitive display that incorporates a display with a touch-sensitive unit operable to sense touch input. A display 570 may be connected to the processor 510 via the bus 550.
The scheme of the embodiment of the application is explained in detail as follows:
in the video coding and decoding technique, if a current image block is inter-predicted using a merge (merge) mode, the inter-prediction parameters are obtained using one of the following prediction modes: conventional convergence mode (standardized merge mode), MMVD mode, SBMM, CIIP mode, TPM.
(I) conventional fusion mode
The merge mode is one of techniques that can effectively improve the efficiency of inter-coding. For the merge mode, a coding end firstly constructs a candidate motion vector list through motion information of coded image blocks adjacent to a current image block in a spatial domain or a temporal domain, takes the candidate motion information with the minimum rate distortion Cost (RD Cost) in the candidate motion vector list as a Motion Vector Predictor (MVP) of the current image block, and then transmits an index value (marked as merge index) of the position of the optimal candidate motion information in the candidate motion vector list to a decoding end.
The positions of the adjacent image blocks and the traversal order of the adjacent image blocks are predefined. RD Cost can be calculated by the following formula (1), where J denotes RD Cost, SAD is the Sum of Absolute Differences (SAD) between the predicted pixel value and the original pixel value obtained by motion estimation using the candidate motion vector predictor, R denotes the code rate, and λ denotes the lagrange multiplier.
J=SAD+λR (1)
Further, the encoding end may perform motion search in a neighborhood centered on the MVP to obtain an actual motion vector of the current image block, and then transmit a difference (i.e., a residual) between the MVP and the actual motion vector to the decoding end.
For example, fig. 6 is a schematic diagram of spatial and temporal domains of a current image block in the embodiment of the present application, referring to fig. 6, where spatial candidate motion information is derived from spatially neighboring 5 blocks (a0, a1, B0, B1, and B2), and if the neighboring image block is not available (i.e., the neighboring image block does not exist, the neighboring image block is not coded, or a prediction mode adopted by the neighboring image block is not an inter prediction mode), the motion information of the neighboring image block is not added to the candidate motion vector list of the current image block. The time domain candidate motion information of the current image block is obtained by scaling a Motion Vector (MV) of an image block at a corresponding position in a reference frame according to Picture Order Counts (POC) of the reference frame and the current frame, and firstly, whether the image block at the T position in the reference frame is available is judged, and if not, the image block at the C position in the reference frame is selected.
The positions of the neighboring blocks in the merge mode and the traversal order thereof are also predefined, and the positions of the neighboring blocks and the traversal order thereof may be different in different merge modes.
(II) MMVD mode
In the MMVD mode, a merge candidate motion vector list is utilized, one or more candidate motion vectors are selected from the merge candidate motion vector list, and then Motion Vector (MV) expansion expression is carried out based on the candidate motion vectors. The MV extended expression comprises an MV starting point, a motion step length and a motion direction.
Wherein, the selected candidate motion vector is a DEFAULT merge TYPE (such as MRG _ TYPE _ DEFAULT _ N) using the existing merge candidate motion vector list. The selected candidate motion vector is the starting point of the MV, in other words, the selected candidate motion vector is used to determine the initial position of the MV.
Referring to table 1, the base candidate index (base candidate IDX) indicates which candidate motion vector in the candidate motion vector list is selected as the optimal candidate motion vector.
TABLE 1
| base candidate IDX | 0 | 1 | 2 | 3 |
| Nth MVP | 1st |
2nd MVP | 3rd MVP | 4th MVP |
In some possible embodiments, if the number of candidate motion vectors available in the merge candidate motion vector list is 1, the base candidate IDX may not be determined.
The step size identification (distance IDX) represents offset distance information of the motion vector. The value of the step size indicator represents a distance (e.g., a preset distance) from the initial position, and the preset distance is defined as shown in table 2.
TABLE 2
| distance IDX | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| |
1/4- |
1/2-pel | 1-pel | 2-pel | 4-pel | 8-pel | 16-pel | 32-pel |
The direction flag (direction IDX) indicates a direction based on an initial position Motion Vector Difference (MVD). The direction indicator may include four cases in total, and the specific definition is shown in table 3:
TABLE 3
| direction IDX | 00 | 01 | 10 | 11 |
| x-axis | + | – | N/A | N/A |
| y-axis | N/A | N/A | + | – |
Where 00 represents the right side, 01 represents the left side, 10 represents the upper side, and 11 represents the lower side.
Fig. 7A is a schematic diagram of an MMVD search point in the embodiment of the present application, and fig. 7B is a schematic diagram of an MMVD search process in the embodiment of the present application. The process of determining the predicted pixel value of the current image block according to the MMVD mode comprises the following steps: the MV starting point is first determined from the base candidate IDX, see for example the hollow dots in fig. 7A located in the center of the L0 reference frame and the L1 reference frame, i.e. the positions pointed to by the solid arrows in fig. 7B on the L0 reference frame and the L1 reference frame. Then, which direction to shift to on the basis of the starting point of the MV is determined based on the direction IDX, and then several pixel points to shift in the direction indicated by the direction IDX are determined based on the distance IDX. For example, the direction IDX is 00 and the distance IDX is 2, which indicate that a motion vector of a pixel point is shifted in the x positive direction as a motion vector of the current image block, so as to predict or obtain a predicted pixel value of the current image block.
(III), SBMM
In the inter prediction of HEVC, motion compensation is performed on the assumption that the motion information of all pixels in a current image block is the same, so as to obtain the prediction values of the pixels of the current image block. However, in the current block, not all pixels necessarily have the same motion characteristics, and therefore, predicting all pixels in the current block using the same motion information may reduce the accuracy of motion compensation, thereby increasing residual information.
In order to further improve the encoding efficiency, in some possible embodiments, the current image block is divided into at least two sub-blocks, then motion information of each sub-block is derived, and motion compensation is performed according to the motion information of the sub-blocks, so as to improve the accuracy of prediction, for example, sub-CU based motion vector prediction (SMVP) technology. The SMVP divides the current image block into subblocks with the size of m multiplied by n, deduces the motion information of each subblock, and then performs motion compensation by using the motion information of each block to obtain a predicted value of the current image block.
In the SBMM, based on the SMVP technique, a sub-block based merging candidate list (sub-block based merging list) may be constructed using a corresponding sub-block based merging schema, and accordingly, the SBMM may include: advanced Temporal Motion Vector Prediction (ATMVP), spatial-temporal motion vector prediction (STMVP), affine model-based prediction modes (including using inherited control point motion vector prediction methods and/or using constructed control point motion vector prediction methods), and inter-plane-based prediction modes (PLANAR). ATMVP is also called sub-block-based temporal motion vector prediction (SbTMVP), among others.
(IV), CIIP mode
In a current image block encoded using merge mode, a flag (e.g., cip _ flag) is transmitted to indicate whether the current block uses CIIP mode. When the CIIP mode is used, an intra-frame prediction block is generated according to an intra-frame prediction mode selected from an intra-frame candidate mode list (intra-frame candidate list) by related syntax elements, an inter-frame prediction block is generated by using a traditional inter-frame prediction method, and finally a final prediction block is generated by using an adaptive weighting mode to combine intra-frame prediction coding and inter-frame prediction coding prediction blocks.
For luma blocks, the intra candidate mode list is chosen from four modes, DC, PLANAR, horizontal (vertical) and vertical (vertical). The size of the intra candidate mode list is chosen according to the shape of the current coding block, and may be 3 or 4. When the width of the current image block is greater than twice the height, the horizontal mode is not included in the intra candidate mode list. When the height of the current image block is greater than twice the width, the vertical mode is not included in the intra candidate mode list.
In the weighting method of the joint intra prediction encoding and inter prediction encoding, different weighting coefficients are used for different intra prediction modes. Specifically, when the intra prediction coding uses the DC or PLANAR mode, or when the current image block length or width is equal to or less than 4, the predicted values obtained by the intra prediction and the inter prediction use the same weight value/weighting coefficient. Otherwise, the weight values/weighting coefficients may be determined according to the intra prediction mode used by the current image block and/or the position of the predicted samples in the current image block, e.g. variable weighting coefficients when horizontal and vertical modes are employed for intra prediction encoding.
(V), TPM
The triangle prediction unit mode (referred to as triangle PU) may also be referred to as a Triangle Partition Mode (TPM) or a fused triangle mode, and for convenience of description, the triangle prediction unit mode or the triangle partition mode is referred to as TPM, and the following is also applicable.
Fig. 8 is a schematic diagram illustrating a division of a current image block in an embodiment of the present application, and referring to fig. 8, a current block is divided into two triangular prediction units, and each triangular prediction unit selects a motion vector and a reference frame index from a unidirectional prediction candidate list. And then obtaining a predicted value for each of the two trigonometric prediction units. And then, obtaining a predicted value by adaptively weighting the pixels included in the hypotenuse area. The entire current block is then subjected to the transform and quantization process. In addition, it should be noted that the triangle prediction unit method is generally applied only to the skip mode or the merge mode. Fig. 8 (1) shows a top-left-bottom-right division (i.e., a top-left-right-bottom division), and fig. 8 (2) shows a top-right-bottom-left division (i.e., a top-right-left-bottom division).
In practical application, in the process of inter-frame prediction of a current image block using a merge mode, besides obtaining inter-frame prediction parameters by using the above fusion modes, other fusion modes may also be used, and the embodiment of the present application is not particularly limited.
The embodiment of the present application provides an inter-frame prediction method, which can be performed by the video decoder in the above embodiments.
Fig. 9 is a first flowchart illustrating an inter-frame prediction method in an embodiment of the present application, and referring to fig. 9, the method may include:
s901: determining to use a fusion mode for inter-frame prediction on a current image block;
here, the decoder may parse the bitstream to obtain a syntax element, where the syntax element may be used to indicate whether the inter prediction parameters of the current image block are obtained from the neighboring inter prediction blocks, that is, the prediction parameters indicating whether the current image block is inter predicted using the fusion mode. Specifically, the syntax element may be general _ merge _ flag, or the like; then, when the general _ merge _ flag is a first value (for example, the general _ merge _ flag is 1), it indicates that the decoder performs inter prediction on the current image block using the fusion mode; and when the general _ merge _ flag is a second value (for example, the general _ merge _ flag is 0), indicating that the decoder performs inter prediction on the current image block without using the fusion mode.
If the value of the syntax element general _ merge _ flag does not exist or does not appear in the bitstream, the decoder can also derive using the following method: if cu _ skip _ flag (used to indicate whether the current image block has a residual, that is, to indicate whether the current image block uses skip mode) is a first value (e.g., cu _ skip _ flag is 1), then general _ merge _ flag is the first value, otherwise, cu _ skip _ flag is a second value (e.g., cu _ skip _ flag is 0), and general _ merge _ flag is the second value. If cu _ skip _ flag is a first value, it indicates that the current image block uses the skip mode, otherwise, if cu _ skip _ flag is a second value, it indicates that the current image block does not use the skip mode.
Then, the decoder may determine whether to use the fusion mode for inter prediction on the current image block according to a value of a syntax element (e.g., general _ merge _ flag) parsed from the bitstream or according to a value of a derived syntax element (e.g., general _ merge _ flag). The decoder performs S902 after determining to inter-predict the current image block using the fusion mode.
In the embodiment of the present application, the current image block is an image block at the CU level, that is, one image block is one CU.
S902: determining whether the current image block allows each of the K alternative fusion modes to be used;
the decoding end and the encoding end may negotiate in advance or a protocol specifies a fusion mode set (or referred to as a fusion mode list), and the fusion mode set may include a plurality of candidate fusion modes. The K candidate fusion modes may be all fusion modes in the fusion mode set, or may be fusion modes that are not determined whether the current image block is allowed to be used in the fusion mode set.
Whether the K fusion modes are part or all of the fusion mode set, the K candidate fusion modes may include one or more of the fusion modes described above, for example, the K candidate fusion modes may include: a traditional fusion mode, an MMVD mode, an SBMM, a CIIP mode and a TPM; alternatively, the K candidate fusion modes may further include: MMVD mode, SBMM, CIIP mode, TPM. Of course, the K candidate fusion modes may also include other fusion modes, and the embodiment of the present application is not particularly limited.
Here, the decoder may determine whether the current image block allows each of the K candidate fusion modes to be used after determining that the current image block is inter-predicted using the fusion mode through S901. In practical application, the decoder may sequentially determine each fusion mode according to the arrangement order of each fusion mode, or may determine each fusion mode in parallel, thereby determining the fusion mode allowed to be used by the current image block.
In a specific implementation process, S902 may include: acquiring a prediction parameter corresponding to a current image block; determining whether the current image block allows to use each fusion mode or not according to the prediction parameters;
first, the decoder may obtain the prediction parameters corresponding to the current image block by parsing from the code stream or obtaining from syntax elements (i.e., merge data syntax). In the embodiment of the present application, the above prediction parameters may include and are not limited to one or more of the following: an indication of syntax elements of the upper level video processing unit, a size of the current image block (i.e., cbWidth, cbHeight), indication information indicating whether the current image block has a residual (i.e., cu _ skip _ flag), a type of the upper level video processing unit.
In the existing high-level syntax of the VVC draft, the syntax structure mainly includes, in addition to the CU level, a sequence level, a picture level, a slice group (tile group) level, and/or a slice (slice) level, and the sizes of the video processing units corresponding to the respective levels are different, for example, the video processing unit of the sequence level includes a multi-frame picture, the video processing unit of the picture level may be divided into a plurality of tile groups or slices, and the video processing unit of the tile group level or slice level may be divided into a plurality of CTUs. In the embodiment of the present application, the upper level video processing unit may include a slice, a tile group, a frame of image, or a video sequence. Then, the type of the upper level video processing unit may be a picture type, slice type, or slice group type of the picture in which the current image block is located.
In practical applications, the above prediction parameters may include, but are not limited to: sps _ mmvd _ enabled _ flag, sps _ ciip _ enabled _ flag, sps _ triangle _ enabled _ flag, maxnumsubabblockMergeCand, maxnumtriangleMergeCand, cbWidth, cbHeight, cu _ skip _ flag, slice _ type, and the like.
Wherein, the sps _ MMVD _ enabled _ flag is used to indicate whether the MMVD mode is allowed to be used by the current sequence, and here, it may be understood that the sps _ MMVD _ enabled _ flag is used to indicate whether the MMVD mode is allowed to be used by the current image block, when the sps _ MMVD _ enabled _ flag is a first value (for example, the sps _ MMVD _ enabled _ flag is 1), it may be determined that the MMVD mode is allowed to be used by the current image block, and conversely, when the sps _ MMVD _ enabled _ flag is a second value (for example, the sps _ MMVD _ enabled _ flag is 0), it may be determined that the MMVD mode is not allowed to be used by the current image block;
similarly, the sps _ CIIP _ enabled _ flag is used to indicate whether the current sequence allows the CIIP mode to be used, and here, it can be understood that the sps _ CIIP _ enabled _ flag is used to indicate whether the current image block allows the CIIP mode to be used; when the sps _ CIIP _ enabled _ flag is a first value (for example, the sps _ CIIP _ enabled _ flag is 1), it may be determined that the current image block is allowed to use the CIIP mode, and conversely, when the sps _ CIIP _ enabled _ flag is a second value (for example, the sps _ CIIP _ enabled _ flag is 0), it may be determined that the current image block is not allowed to use the CIIP mode;
the sps _ triangle _ enabled _ flag is used for indicating whether the current sequence allows the TPM mode to be used, and may be understood as indicating whether the current tile allows the TPM mode to be used, when the sps _ triangle _ enabled _ flag is a first value (e.g., the sps _ triangle _ enabled _ flag is 1), it may be determined that the current tile allows the TPM mode to be used, and conversely, when the sps _ triangle _ enabled _ flag is a second value (e.g., the sps _ triangle _ enabled _ flag is 0), it may be determined that the current tile does not allow the TPM mode to be used; maxnumsubblock mergetarget is used to represent the maximum length of the sub-block fusion candidate list, maxnummergetarget represents the maximum length of the fusion candidate motion vector list, cbWidth is the width of the current image block, cbHeight is the height of the current image block, and slice _ type is used to indicate the image type or slice (slice) type of the current image block.
Then, after obtaining the prediction parameters, the decoder may determine whether the current image block uses each of the fusion modes according to the prediction parameters.
Specifically, the decoder may obtain values of second identifiers corresponding to the respective fusion modes according to the prediction parameters, and indicate whether the current image block uses the corresponding fusion mode with the second identifiers. In the embodiment of the present application, the second identifier may include and is not limited to: allowmvd, allowsmm, allowsipip, allowTPM. allowmvd is the second identification of MMVD mode, allowsmm is the second identification of SBMM, allowsipip is the second identification of CIIP mode, and allowspm is the second identification of TPM. When the second identifier is a first value (for example, the first identifier is 1), the decoder determines that the current image block allows to use the fusion mode corresponding to the second identifier; otherwise, when the second flag is a second value (e.g., the first flag is 0), the decoder determines that the current image block allows the fusion mode corresponding to the second flag to be used. For example, when allowmvd is 1, the decoder determines that the current image block allows the MMVD mode to be used, and when allowmvd is 0, the decoder determines that the current image block does not allow the MMVD mode to be used.
In some possible implementations, the decoder may obtain the value of the second identifier of each fusion mode through the following equations (1) to (4).
allowMMVD = sps_mmvd_enabled_flag (1)
allowSBMM=MaxNumSubblockMergeCand>0&&cbWidth>=8
&& cbHeight >= 8 (2)
allowCIIP=sps_ciip_enabled_flag&&!cu_skip_flag&&(cbWidth*cbHeight)>=64
&&cbWidth<128&&cbHeight<128 (3)
allowTPM=sps_triangle_enabled_flag&&slice_type==B
&& MaxNumTriangleMergeCand >= 2 && (cbWidth*cbHeight) >= 64 (4)
Of course, in some possible embodiments, the decoder may also obtain the value of the second identifier of each fusion mode according to the prediction parameter in other manners, which is not specifically limited in the embodiments of the present application.
S903: under the condition that the current image block allows the current fusion mode to be used and the current image block allows the fusion mode except the current fusion mode in the K alternative fusion modes to be used, analyzing and obtaining a first identifier value of the current fusion mode from the code stream;
the first identifier is used for indicating whether the current image block uses a corresponding fusion mode. The first identification may include, but is not limited to: one or more of a regular _ merge _ flag, an mmvd _ merge _ flag, a merge _ sublock _ flag, a ciip _ flag, a merge _ triangle _ flag, and the like. The regular _ merge _ flag is a first identifier of a traditional fusion mode, the MMVD _ merge _ flag is a first identifier of an MMVD mode, the merge _ sublock _ flag is a first identifier of an SBMM, the CIIP _ flag is a first identifier of a CIIP, and the merge _ triangle _ flag is a first identifier of a TPM. Assuming that, when the regular _ merge _ flag is 1, the decoder may determine to perform inter prediction on the current image block using the conventional fusion mode, and when the regular _ merge _ flag is 0, the decoder may determine to perform inter prediction on the current image block not using the conventional fusion mode; when the MMVD _ merge _ flag is 1, the decoder may determine to perform inter prediction on the current image block using the MMVD mode, and when the MMVD _ merge _ flag is 0, the decoder may determine to perform inter prediction on the current image block not using the MMVD mode; when the merge _ sub _ flag is 1, the decoder may determine to perform inter prediction on the current image block using the SBMM, and when the merge _ sub _ flag is 0, the decoder may determine to perform inter prediction on the current image block without using the SBMM; when the CIIP _ flag is 1, the decoder may determine to perform inter prediction on the current image block using the CIIP mode, and when the CIIP _ flag is 0, the decoder may determine to perform inter prediction on the current image block not using the CIIP mode. The merge _ triangle _ flag may be a MergeTriangleFlag.
Here, after determining the fusion mode that the current image block is allowed to use, in the case that the current image block is allowed to use the current fusion mode and the current image block is allowed to use a fusion mode other than the current fusion mode among the K candidate fusion modes, the decoder parses the value of the first identifier of the current fusion mode from the code stream.
Specifically, S903 may include:
under the condition that the current image block allows to use at least one of the MMVD mode, the SBMM, the CIIP mode and the TPM, analyzing and obtaining a value of a regular _ merge _ flag of the traditional fusion mode from a code stream, wherein at the moment, the regular _ merge _ flag defaults to be a first value, and if the regular _ merge _ flag defaults to be 1; or,
under the second condition, under the condition that the current image block allows to use the MMVD mode and the current image block allows to use at least one of the SBMM, the CIIP mode and the TPM, analyzing and obtaining the value of MMVD _ merge _ flag of the MMVD mode from the code stream; or,
under the third condition, under the condition that the current image block allows using the SBMM mode and the current image block allows using the CIIP mode and/or the TPM, analyzing the code stream to obtain the value of merge _ sublock _ flag of the SBMM; or,
and in the fourth case, under the condition that the current image block allows the CIIP mode and the TPM to be used, analyzing the code stream to obtain the value of the CIIP _ flag of the CIIP mode.
It should be noted that the decoding module may sequentially determine whether to parse the value of the first identifier of the current fusion mode from the code stream according to the sequence of the K candidate fusion modes. And when the value of the first identifier of the previous fusion mode is a second value, namely the current image block does not use the previous fusion mode, the decoder further judges whether to analyze the value of the first identifier of the current fusion mode from the code stream.
Then, the above S903 may further include:
corresponding to the first situation, when the general _ merge _ flag is a first value and the current image block allows to use at least one of the MMVD mode, the SBMM mode, the CIIP mode and the TPM, analyzing the code stream to obtain a regular _ merge _ flag value in the traditional fusion mode; or,
corresponding to the second case, when the regular _ merge _ flag is a second value, the current image block allows the MMVD mode to be used, and the current image block allows at least one of the SBMM, the CIIP mode and the TPM, analyzing the code stream to obtain a value of MMVD _ merge _ flag of the MMVD mode; or,
corresponding to the third case, when the regular _ merge _ flag is a second value, the mmvd _ merge _ flag is a second value, the current image block allows the SBMM mode to be used, and the current image block allows the CIIP mode and/or the TPM, the value of the merge _ sublock _ flag of the SBMM is obtained by parsing from the code stream; or,
corresponding to the fourth situation, when the regular _ merge _ flag is a second value, the mmvd _ merge _ flag is a second value, and the merge _ sublock _ flag is a second value, and the current image block allows the CIIP mode and the TPM to be used, the value of the CIIP _ flag of the CIIP mode is obtained through analysis from the code stream.
In some possible embodiments, in the case that the decoder indicates whether the current image block uses the corresponding fusion mode with the second identifier, before S903, the method may further include: the decoder judges whether the value of the second identifier of the current fusion mode meets a preset analysis condition. And then, when the value of the second identifier meets the preset analysis condition, analyzing the code stream to obtain the value of the first identifier of the current fusion mode, otherwise, when the value of the second identifier of the current fusion mode does not meet the preset analysis condition, determining the value of the first identifier of the current fusion mode by the decoder according to the preset derivation condition.
For example, assume that the order of the individual fusion modes in the fusion mode set may be: a traditional fusion mode, an MMVD mode, an SBMM, a CIIP mode and a TPM; then it is determined that,
the current fusion mode is a conventional fusion mode, and the preset parsing condition corresponding to the first case may include, but is not limited to:
1) at least one of allowmvd, allowsmm, allowcipip and allowppm is greater than 0;
in some possible embodiments, the preset resolution condition 1) can be further described as: allowmvd + allowsmm + allowsciap + allowstpm > 0; or allowmmd allowsmms allowsmm allowsciamp allowscip allowstpm.
The current fusion mode is an MMVD mode, and the preset parsing condition corresponding to the second case may include, but is not limited to:
2) the regular _ merge _ flag is 0, allowmvd is greater than 0, and at least one of allowsmm, allowsciip and allowstpm is greater than 0;
in some possible embodiments, the preset parsing condition 2) may be further described as: allowmvd & & allowsmm + allowsciip + allowstpm > 0; or allowmvd & & (allowsmm + allowcipip + allowspm); or allowmvd & & (allowsmm | | | allowcipip | | | allowppm).
It should be noted that, in the case that the current merging mode is the MMVD mode, the conventional merging mode is already determined not to be used, that is, the regular _ merge _ flag is 0, and at this time, the value of the regular _ merge _ flag may not be repeatedly determined.
The current fusion mode is SBMM, and the preset parsing condition corresponding to the third case may include, but is not limited to:
3) regular _ merge _ flag is 0, mmvd _ merge _ flag is 0, allowsmm is greater than 0, allowsfip and/or allowspm is greater than 0;
in some possible embodiments, the preset parsing condition 3) can also be described as: allowsmm & & allowsCIIP + allowsTPM > 0; or, allowsmm & & (allowsipip + allowstpm) > 0; alternatively, allowsmm & & (allowcipip | | allowspm).
It should be noted that, in the case that the current convergence mode is the SBMM mode, the conventional convergence mode and the MMVD mode are determined not to be used, that is, the regular _ merge _ flag is 0, and the MMVD _ merge _ flag is 0, at this time, the values of the regular _ merge _ flag and the MMVD _ merge _ flag may not be repeatedly determined.
The current fusion mode is a CIIP mode, and the preset parsing condition corresponding to the fourth condition may include, but is not limited to:
4) the regular _ merge _ flag is 0, the merge _ sublock _ flag is 0, allowCIIP is more than 0, and allowTPM is more than 0;
in some possible embodiments, the preset parsing condition 4) can be further described as: allowCIIP & & allowTPM.
It should be noted that, in the case that the current fusion mode is the CIIP mode, the conventional fusion mode, MMVD mode, and SBMM are already determined to be not used, that is, the regular _ merge _ flag is 0, the MMVD _ merge _ flag is 0, and the merge _ sublock _ flag is 0, at this time, the values of the regular _ merge _ flag, the MMVD _ merge _ flag, and the merge _ sublock _ flag may not be repeatedly determined.
The above judgment process can be referred to the syntax table described in table 4 below. That is, when general _ merge _ flag is a first value, the bitstream may be parsed according to the syntax structure of merge _ data (), thereby obtaining values of syntax elements in table 4. Wherein (x0, y0) represents the coordinate position of the luminance pixel value of the top left vertex of the current image block relative to the luminance pixel of the top left vertex of the current image block, and (x0, y0) in the following syntax table have the same meaning, and are not described in detail.
TABLE 4
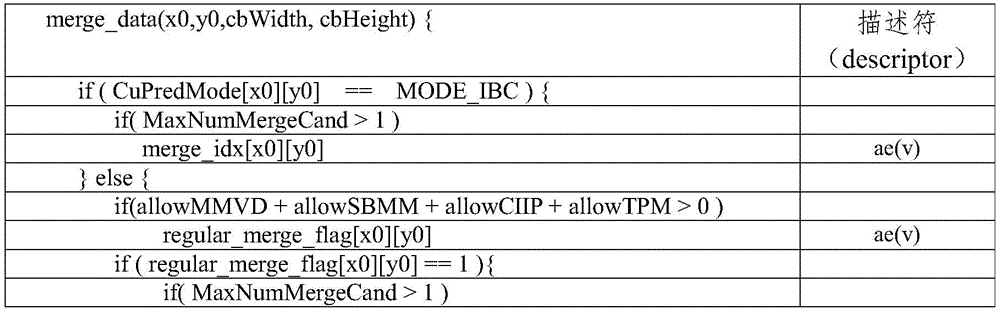

It should be noted that the preset analysis conditions 1), 2), 3), and 4) may be described in other manners, and the embodiment of the present application is not particularly limited.
If the decoder determines that the value of the second identifier meets the preset analysis condition through the above process, the decoder can analyze the code stream to obtain the value of the first identifier of the corresponding fusion mode. For example, if the values of allowmvd, allowsmm, allowsciip, and allowstpm satisfy the preset parsing condition 1), the decoder may parse the bitstream to obtain the value of the first identifier of the conventional merging mode, that is: the value of regular _ merge _ flag; for another example, if the values of allowmvd, allowsmm, allowsciip, and allowstpm satisfy the preset parsing condition 2), the decoder may parse the code stream to obtain the value of the first identifier of the MMVD mode, that is: the value of mmvd _ merge _ flag; the method can also comprise the following steps: if the values of allowsmm, allowsciip and allowstpm satisfy the preset parsing condition 3), the decoder may parse the code stream to obtain the value of the first identifier of the SBMM, that is: the value of merge _ sublock _ flag; or, if the values of allowCIIP and allowTPM meet the preset parsing condition 4), the decoder may parse the code stream to obtain the value of the first identifier of the CIIP mode, that is: value of ciip _ flag.
If the decoder determines that the value of the second identifier does not satisfy the preset parsing condition through the above process, the decoder may determine the value of the first identifier of each fusion mode according to the preset derivation condition.
Here, the preset derivation condition is explained below.
In some possible embodiments, when the value of the second identifier of each fusion mode satisfies the preset parsing condition, the value of the first identifier of each fusion mode may not exist or not appear in the code stream, and thus the decoder cannot parse the code stream to obtain the value of the first identifier of each fusion mode, in this case, the decoder may also perform derivation according to the preset derivation condition to obtain the value of the first identifier of each fusion mode. For example, if a preset derivation condition is satisfied, the value of the first flag of the fusion mode is set to a first value, otherwise, the value of the first flag of the fusion mode is set to a second value.
For example, if allowsvd, allowsmm, allowsciip, and allowspm do not satisfy the preset parsing condition 1) or there is no value of regular _ merge _ flag in the bitstream, the value of the decoder general _ merge _ flag is set to the value of regular _ merge _ flag, and since the general _ merge _ flag is a first value (for example, general _ merge _ flag is 1), the value of regular _ merge _ flag is also the first value; or, the decoder sets the value of the regular _ merge _ flag to a first value, that is, sets the regular _ merge _ flag to 1, which indicates that the current image block is inter-predicted using the conventional fusion mode.
Or, if allowsvd, allowsmm, allowsciip, and allowstpm do not satisfy the preset parsing condition 1) or the value of regular _ merge _ flag does not exist in the bitstream, and when CuPredMode is MODE _ INTER (the current image block uses INTER prediction), the value of regular _ merge _ flag is set to the value of general _ merge _ flag. That is, when CuPredMode is satisfied as MODE _ INTER and general _ merge _ flag value is 1, the value of regular _ merge _ flag is set to 1, otherwise the value of regular _ merge _ flag is set to 0.
In some embodiments, the prediction MODE identifier of the current image block is CuPredMode [ x0] [ y0], and the MODE _ INTER for CuPredMode [ x0] [ y0] indicates that the current image block uses INTER prediction. The coordinates (x0, y0) represent the position of the luminance pixel of the top left vertex of the current image block relative to the top left vertex luminance pixel of the image in which the current image block is located. The designation meaning of CuPredMode [ x0] [ y0] is the same as that described herein, and is not repeated here.
If allowmvd, allowsmm, allowcciip, and allowTPM do not satisfy the preset parsing condition 2) or the value of mmvd _ merge _ flag does not exist in the code stream, the decoder sets the value of mmvd _ merge _ flag to a first value under the condition that a first derivation condition is satisfied; here, the first push condition may be that the current image block allows the MMVD mode to be used (i.e., the allowmvd value is a first value), the value of general _ merge _ flag is a first value, and the value of regular _ merge _ flag is a second value; for example, if the allowmvd value is 1, the general _ merge _ flag value is 1, and the regular _ merge _ flag value is 0, the MMVD _ merge _ flag is set to 1, and at this time, it indicates that the current image block uses the MMVD mode to perform inter prediction. Alternatively, the first push condition may also be that the current image block allows to use the MMVD mode (that is, the allowmvd value is a first value), the general _ merge _ flag value is a first value, the regular _ merge _ flag value is a second value, and the current image block uses inter prediction; for example, if allowmvd has a value of 1, general _ merge _ flag has a value of 1, regular _ merge _ flag has a value of 0, and CuPredMode has a MODE _ INTER, then mmvd _ merge _ flag is set to 1.
If the allowsmm, allowsCIIP and allowsTPM do not meet the preset analysis condition 3) or the value of merge _ sublock _ flag does not exist in the code stream, setting the value of the merge _ sublock _ flag as a first value by the decoder under the condition of meeting a second derivation condition; here, the second derivation condition may be that the current image block allows using the SBMM (i.e., the value of allowsmm is a first value), the value of general _ merge _ flag is a first value, the value of regular _ merge _ flag is a second value, and the value of merge _ mmvd _ flag is a second value; for example, if the allowsmm value is 1, the general _ merge _ flag value is 1, the regular _ merge _ flag value is 1, and the merge _ mmvd _ flag value is 0, the merge _ sublock _ flag is set to 1, and at this time, it indicates that the current image block uses SBMM to perform inter prediction.
Or, the second derivation condition may be that the current image block allows using SBMM (i.e. the value of allowsmm is a first value), the value of general _ merge _ flag is a first value, the value of regular _ merge _ flag is a second value, the value of merge _ mmvd _ flag is a second value, and the current image block uses inter prediction; for example, allowsmm value is 1, general _ merge _ flag value is 1, regular _ merge _ flag is 1, merge _ mmvd _ flag is 0, and CuPredMode is MODE _ INTER, merge _ sublock _ flag is set to 1.
If allowCIIP and allowTPM do not meet the preset analysis condition 4) or the value of the ciip _ flag does not exist in the code stream, the decoder sets the value of the ciip _ flag to be a first value under the condition that a third derivation condition is met; here, the third derivation condition may be that the current image block is allowed to use the CIIP mode (i.e., allowaucip is a first value), general _ merge _ flag is a first value, regular _ merge _ flag is a second value, mmvd _ merge _ flag is a second value, and merge _ sublock _ flag is a second value; for example, if the allowCIIP value is 1, the general _ merge _ flag value is 1, the regular _ merge _ flag value is 0, the merge _ mmvd _ flag value is 0, and the merge _ sublock _ flag value is 0, the CIIP _ flag is set to 1, and at this time, it indicates that the current image block uses the CIIP mode to perform inter-frame prediction.
Or, the third derivation condition may also be that the current image block is allowed to use the CIIP mode (that is, allowCIIP is a first value), general _ merge _ flag is a first value, regular _ merge _ flag is a second value, mmvd _ merge _ flag is a second value, merge _ sublock _ flag is a second value, and the current image block uses inter prediction; for example, if allowCIIP value is 1, general _ merge _ flag value is 1, regular _ merge _ flag is 0, merge _ mmvd _ flag is 0, merge _ sublock _ flag is 0, and CuPredMode is MODE _ INTER, then ciip _ flag is set to 1.
The value of the merge _ triangle _ flag may be derived, for example, in a case where a fourth derivation condition is satisfied, the decoder sets the value of the merge _ triangle _ flag to a first value; here, the fourth derivation condition may be that the current tile is allowed to use the TPM mode (i.e., allowawtpm is a first value), general _ merge _ flag is a first value, regular _ merge _ flag is a second value, mmvd _ merge _ flag is a second value, merge _ sublock _ flag is a second value, and ciip _ flag is a second value; for example, if the allowTPM value is 1, the general _ merge _ flag value is 1, the regular _ merge _ flag is 0, the merge _ mmvd _ flag is 0, the merge _ sublock _ flag is 0, and the cip _ flag is 0, the merge _ triangle _ flag is set to 1, which indicates that when the image type or slice type of the current image block is B, the current image block performs inter-frame prediction using the TPM mode.
Or, the fourth derivation condition may also be that the current tile is allowed to use the TPM mode (that is, the allowTPM is a first value), general _ merge _ flag is a first value, regular _ merge _ flag is a second value, mmvd _ merge _ flag is a second value, merge _ sublock _ flag is a second value, ciip _ flag is a second value, and the current tile uses inter prediction; for example, if allowTPM value is 1, general _ merge _ flag value is 1, regular _ merge _ flag is 0, merge _ mmvd _ flag is 0, merge _ sublock _ flag is 0, ciip _ flag is 0, and cuppredmode is MODE _ INTER, mergetriglangleflag is set to 1.
In practical applications, the decoder may also determine the value of the first identifier of each fusion mode through other preset derivation conditions, which is not specifically limited in the embodiment of the present application.
In summary, the decoder may, without limitation, obtain the second identifier, the first identifier, the corresponding preset parsing condition, and the preset derivation condition of the first fusion mode, respectively, as shown in table 5. Table 5 is specifically shown below:
TABLE 5
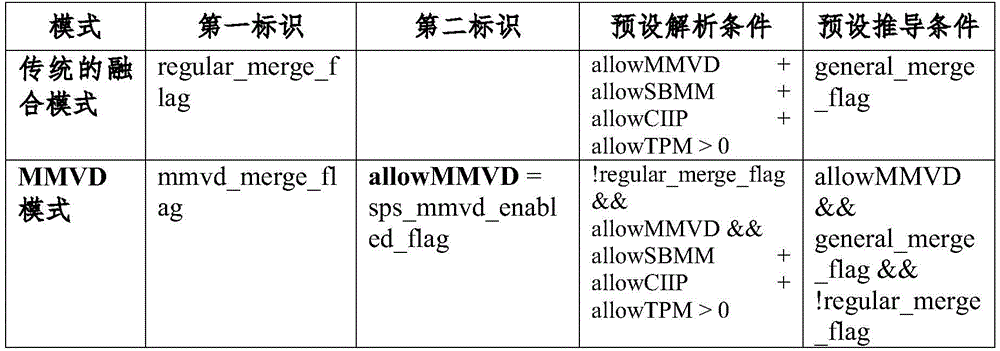

In summary, the decoder may also obtain the second identifier, the first identifier, the corresponding predetermined parsing condition or the predetermined derivation condition of the first fusion mode, respectively, without being limited to the descriptions in table 6. Table 6 is specifically shown below:
TABLE 6


In this embodiment of the present application, after S902, the decoder determines whether the current image block allows using each fusion mode, and then, under the condition that the current image block does not allow using the fusion modes other than the current fusion mode of the K candidate fusion modes, performs inter prediction on the current image block using the current fusion mode to obtain a prediction block of the current image block.
Here, after the decoder determines that the current image block does not allow the use of a fusion mode other than the current fusion mode in which the K candidate fusion modes are used, the decoder does not need to further analyze the value of the first identifier of the current image block, but uses the current fusion mode to perform inter-frame prediction on the current image block to obtain a prediction block of the current image block, thereby removing the analysis redundancy of the fusion syntax elements, reducing the decoding complexity to a certain extent, and improving the decoding efficiency.
S904: and under the condition that the value of the first identifier indicates that the fusion mode for inter-frame prediction of the current image block is the current fusion mode, performing inter-frame prediction on the current image block by using the current fusion mode to obtain a prediction block of the current image block.
Here, after obtaining the value of the first flag of the current fusion mode by parsing or derivation from the code stream through S903, the decoder may determine whether the current image block uses the current fusion mode according to the value of the first flag. Under the condition that the value of the first identifier indicates that the fusion mode for inter-frame prediction of the current image block is the current fusion mode, the decoder does not need to analyze the values of the first identifiers of other fusion modes in the K alternative fusion modes from the code stream, and uses the current fusion mode to perform inter-frame prediction on the current image block to obtain a prediction block of the current image block, so that the analysis redundancy of the fusion syntax elements is removed, the decoding complexity is reduced to a certain extent, and the decoding efficiency is improved.
At this point, the decoder completes the inter prediction process for the current image block.
The above method is described below by way of specific examples.
It is assumed that the order of the individual fusion modes in the set of fusion modes can be: conventional converged mode → MMVD mode → SBMM → CIIP mode → TPM.
Step 1: the decoder determines whether to use the fusion mode for the current image block.
Specifically, whether the current image block uses the fusion mode may be determined according to a syntax element general _ merge _ flag at the CU level, that is, the value of general _ merge _ flag is 1, the current image block uses the fusion mode to perform inter-frame prediction, and then step 2 is executed;
step 2: the decoder determines whether the current image block uses a conventional fusion mode;
specifically, whether the current image block uses the conventional fusion mode may be determined according to the value of the syntax element regular _ merge _ flag. If the value of the regular _ merge _ flag is 1, it indicates that the current image block uses the conventional fusion mode for inter prediction, and if the value of the regular _ merge _ flag is 0, it indicates that the current image block does not use the conventional fusion mode for inter prediction.
Further, the value of regular _ merge _ flag may be determined by parsing syntax elements as described in the above embodiments, or may be derived by derivation. If the preset parsing condition 1) is satisfied, the decoder parses the value of a regular _ merge _ flag from the bitstream, otherwise, when the value of the syntax element does not exist in the bitstream, the value of the regular _ merge _ flag is the same as the value of the general _ merge _ flag by default, and when the value of the general _ merge _ flag is 1, the value of the regular _ merge _ flag is set to 1.
And if the value of the regular _ merge _ flag is 1, performing inter prediction on the current image block by using the conventional fusion mode, otherwise, executing the step 3.
And step 3: the decoder determines whether the current image block uses the MMVD mode;
specifically, whether the current image block uses MMVD may be determined according to a value of the syntax element MMVD _ merge _ flag. And if not, when the value of the MMVD _ merge _ flag is 0, the current image block does not use the MMVD mode to perform inter prediction.
Similarly, the value of mmvd _ merge _ flag may be determined by parsing syntax elements as described in the above embodiments, or may be derived. If the preset parsing condition 2) is satisfied, the decoder may parse the code stream to obtain a value of mmvd _ merge _ flag, otherwise, when the value of the syntax element does not exist in the code stream, the following preset derivation conditions may be used for derivation to obtain:
if the following preset derivation conditions a) to c) are all established, the value of mmvd _ merge _ flag is set to 1, otherwise, to 0.
a) The allowmvd value is 1;
b) the general _ merge _ flag value is 1;
c) the regular _ merge _ flag value is 0.
Or, when the value of the syntax element does not exist in the code stream or does not satisfy the preset parsing condition 2), the following preset derivation conditions may also be used for derivation:
the value of mmvd _ merge _ flag is set to 1 if the following preset derivation conditions a) to c) and c2) are all established, and is set to 0 otherwise.
a) The allowmvd value is 1;
b) the general _ merge _ flag value is 1;
c) the regular _ merge _ flag value is 0;
c2) CuPredMode [ x0] [ y0] is MODE _ INTER.
Wherein, CuPredMode [ x0] [ y0] is the prediction mode identifier of the current image block. CuPredMode [ x0] [ y0] indicates that the current image block uses INTER prediction for MODE _ INTER. The coordinates (x0, y0) represent the position of the luminance pixel of the top left vertex of the current image block relative to the top left vertex luminance pixel of the image in which the current image block is located.
CuPredMode [ x0] [ y0] being MODE _ INTRA means that the current image block uses INTRA prediction, and CuPredMode [ x0] [ y0] being MODE _ IBC means that the current image block uses IBC MODE (INTRA block copy).
And if the value of MMVD _ merge _ flag is 1, performing inter-frame prediction on the current image block by using the MMVD mode, otherwise, executing the step 4.
And 4, step 4: the decoder determines whether the current image block uses the SBMM;
specifically, whether the current image block uses the SBMM may be determined according to a value of a syntax element merge _ sublock _ flag. And if not, the value of the merge _ sub _ flag is 0, and the current image block does not use the SBMM to perform inter-frame prediction.
Similarly, the value of merge _ sublock _ flag may be determined by parsing syntax elements as described in the above embodiments, or may be derived. If the preset parsing condition 3) is met, the decoder parses the code stream to obtain the value of merge _ sublock _ flag, otherwise, when the value of the syntax element does not exist in the code stream, the following preset derivation conditions can be used for derivation to obtain the syntax element:
if the following preset derivation conditions d) to g) are all satisfied, the value of merge _ sublock _ flag is set to 1, otherwise, to 0.
d) allowsmm value of 1
e) general _ merge _ flag value of 1
f) The regular _ merge _ flag value is 0
g) The merge _ mmvd _ flag value is 0.
Or, when the value of the syntax element does not exist in the code stream or does not satisfy the preset parsing condition 3), the following preset derivation conditions may also be used for derivation:
if the following preset derivation conditions d) to g) and g2) are both established, the value of merge _ sublock _ flag is set to 1, and otherwise, to 0.
d) allowsmm value of 1
e) general _ merge _ flag value of 1
f) The regular _ merge _ flag value is 0
g) merge _ mmvd _ flag value 0
g2) CuPredMode [ x0] [ y0] is MODE _ INTER.
And if the value of the merge _ sub _ flag is 1, performing inter-frame prediction on the current image block by using the SBMM, otherwise, executing the step 5.
And 5: the decoder determines whether the current image block uses CIIP;
specifically, whether the current image block uses CIIP is determined according to the value of a syntax element CIIP _ flag. And if not, the value of the CIIP _ flag is 0, and the current image block does not use the CIIP mode to carry out inter-frame prediction.
Similarly, the value of ciip _ flag may be determined by parsing syntax elements as described in the above embodiments, or may be derived. If the preset parsing condition 4) is met, the decoder parses the code stream to obtain the value of the ciip _ flag, otherwise, when the value of the syntax element does not exist in the code stream, the value of the ciip _ flag is derived according to the following preset derivation conditions:
if the following preset derivation conditions h) to l) are all true, the value of the ciip _ flag is set to 1, otherwise, the value of the ciip _ flag is set to 0.
h) allowCIIP of 1
i) general _ merge _ flag is 1
j) regular _ merge _ flag is 0
k) merge _ mmvd _ flag is 0
l) merge _ sublock _ flag is 0.
Or, when the value of the syntax element does not exist in the code stream or does not satisfy the preset parsing condition 4), the following preset derivation conditions may also be used for derivation:
if the following preset derivation conditions h) to l) and l2) are both true, the value of the ciip _ flag is set to 1, otherwise, the value of the ciip _ flag is set to 0.
h) allowCIIP of 1
i) general _ merge _ flag is 1
j) regular _ merge _ flag is 0
k) merge _ mmvd _ flag is 0
l) merge _ sublock _ flag is 0
l2) CuPredMode [ x0] [ y0] is MODE _ INTER.
And if the value of the ciip _ flag is 0, the current image block uses the TPM to perform inter-frame prediction.
Or, if the ciip _ flag is 0, optionally, the mergetriglangleflag value is set to 1, and the current image block uses the TPM to perform inter-frame prediction.
Or, if the following preset derivation conditions m) to r) are all true, the MergeTriangleFlag value is 1, and otherwise, it is 0.
m) allowTPM as 1
n) general _ merge _ flag [ x0] [ y0] is 1
o) regular _ merge _ flag [ x0] [ y0] is 0
p) mmvd _ merge _ flag [ x0] [ y0] is 0
q) merge _ sublock _ flag [ x0] [ y0] is 0
r) ciip _ flag [ x0] [ y0] is 0
Alternatively, if the following preset derivation conditions m) to r) and s) are all true, the MergeTriangleFlag value is 1, and otherwise, it is 0.
m) allowTPM as 1
n) general _ merge _ flag [ x0] [ y0] is 1
o) regular _ merge _ flag [ x0] [ y0] is 0
p) mmvd _ merge _ flag [ x0] [ y0] is 0
q) merge _ sublock _ flag [ x0] [ y0] is 0
r) ciip _ flag [ x0] [ y0] is 0
s) CuPredMode [ x0] [ y0] is MODE _ INTER
Further, if the merge _ triangle _ flag value is 1, the decoder may parse TPM-related syntax elements, such as merge _ triangle _ split _ dir, merge _ triangle _ idx0, merge _ triangle _ idx1, and so on.
In the embodiment of the application, on the premise that the decoder determines that the current image block uses the fusion mode to perform inter-frame prediction, if the current image block allows the current fusion mode to be used and the current image block allows the fusion mode except the current fusion mode among the K alternative fusion modes to be used, the decoder uses the current fusion mode to perform inter-frame prediction on the current image block according to the indication of the value of the first identifier of the current image block obtained by analyzing in the code stream to obtain the prediction block of the current image block, and does not need to analyze the values of the first identifiers of each fusion mode except the current fusion mode among the K alternative fusion modes, so that the analysis redundancy of the fusion syntax elements is removed, the decoding complexity is reduced to a certain extent, and the decoding efficiency is improved.
Based on the foregoing embodiments, the present application provides an inter-frame prediction method, which can be performed by the video encoder in the foregoing embodiments.
Fig. 10 is a flowchart illustrating a second inter-frame prediction method in an embodiment of the present application, and referring to fig. 10, the method may include:
s1001: determining to use a fusion mode for inter-frame prediction on a current image block;
here, the encoder may determine whether the inter prediction parameter of the current image block is obtained from an adjacent inter prediction block according to RD Cost, that is, determine whether the current image block is inter predicted using the fusion mode. If the encoder determines that the current image block uses the fusion mode for inter-frame prediction, the syntax element general _ merge _ flag is set to a first value (for example, general _ merge _ flag is set to 1), otherwise, if the encoder determines that the current image block does not use the fusion mode for inter-frame prediction, the syntax element general _ merge _ flag is set to a second value (for example, general _ merge _ flag is set to 0), and finally, the encoder carries the value of general _ merge _ flag in the code stream and transmits the code stream to the decoder.
In some possible embodiments, the encoder does not need to write general _ merge _ flag into the bitstream, and at this time, the decoder can derive the following method: if cu _ skip _ flag (a syntax element indicating whether the skip mode is used for the current image block) is a first value, general _ merge _ flag is the first value, otherwise, cu _ skip _ flag is a second value, and general _ merge _ flag is the second value.
Then, the encoder may perform S1002 after determining to inter-predict the current image block using the fusion mode.
S1002: determining at least one fusion mode allowed to be used for the current image block from the K candidate fusion modes;
the decoding end and the encoding end may negotiate in advance or a protocol specifies a fusion mode set (or referred to as a fusion mode list), and the fusion mode set may include a plurality of candidate fusion modes. The K candidate fusion modes may be all fusion modes in the fusion mode set, or may be fusion modes that are not determined whether the current image block is allowed to be used in the fusion mode set.
Whether the K fusion modes are part or all of the fusion mode set, the K candidate fusion modes may include one or more of the fusion modes described above, for example, the K candidate fusion modes may include: a traditional fusion mode, an MMVD mode, an SBMM, a CIIP mode and a TPM; alternatively, the K candidate fusion modes may further include: MMVD mode, SBMM, CIIP mode, TPM. Of course, the K candidate fusion modes may also include other fusion modes, and the embodiment of the present application is not particularly limited.
Here, after the encoder determines to use the fusion mode for the current image block through S1001, the encoder may obtain the prediction parameters described in the above embodiments through the pre-stored syntax element or the derived syntax element, and then, according to the prediction parameters, determine whether the current image block allows to use each of the K candidate fusion modes, that is, obtain the value of the second identifier of each fusion mode, and further determine whether the current image block allows to use each fusion mode according to the value of the second identifier. Specifically, the encoder may obtain the value of the second identifier of the fusion mode through formulas (1) to (4) in the above embodiment, which is not described herein again. In practical applications, the encoder may not need to pass the value of the second identifier of each fusion mode to the decoder, and the decoder may obtain the values through the above equations (1) to (4).
S1003: determining a target fusion mode from at least one fusion mode;
here, after determining the fusion mode allowed to be used for the current image block through S1002, the encoder calculates RD Cost corresponding to each fusion mode, and selects a fusion mode with the smallest RD Cost as a target fusion mode, where the target fusion mode is a fusion mode finally used for the current image block. Further, the encoder may set a value of the first identifier of the target fusion mode, and carry the value of the first identifier of the target fusion mode in the code stream to be transmitted to the decoder. Specifically, the encoder may first determine whether the value of the second identifier of each fusion mode satisfies a preset parsing condition, and if the value of the second identifier of each fusion mode satisfies the preset parsing condition, the encoder carries the value of the first identifier of the corresponding fusion mode in the code stream as shown in the syntax table shown in table 4 above and transmits the value to the decoder.
In some possible embodiments, after obtaining the values of the second identifier of each fusion mode through S1002, the encoder may determine which fusion modes are allowed to be used for inter prediction for the current image block, and then set the values of the first identifiers of the allowed fusion modes. For example, when allowmvd is a first value, the encoder determines that inter prediction is not allowed to be performed on the current image block using the MMVD mode, and then the encoder may set a first flag of the MMVD mode, that is, MMVD _ merge _ flag, to the first value, whereas, when allowmvd is a second value, the encoder determines that inter prediction is allowed to be performed on the current image block using the MMVD mode, and then the encoder may set the first flag of the MMVD mode, that is, MMVD _ merge _ flag, to the second value. The same can be said for other fusion modes, so that the encoder can obtain the value of the first identifier of the fusion mode allowed to be used for the current image block, and the encoder can transmit the value of the first identifier of the fusion mode, of which the value of the second identifier meets the preset condition, to the decoder according to the code stream carried in the syntax table shown in table 4 above.
In a specific implementation process, the encoder may further sequentially set a value of the first identifier of the fusion mode that is allowed to be used according to the order of the K candidate fusion modes. For example, the order in which the fusion mode is allowed to be used may be: MMVD mode → SBMM → CIIP mode, then the encoder may set the first flag of MMVD mode, i.e., MMVD _ merge _ flag, to the second value, and then set the first flags of SBMM and CIIP mode, i.e., merge _ sub _ flag and CIIP _ flag, to the first value without making a decision one by one. The encoder can obtain the value of the first identifier of the fusion mode allowed to be used by the current image block, and the encoder can transmit the value of the first identifier of the fusion mode, of which the value of the second identifier meets the preset condition, to the decoder in the code stream carried in the syntax table shown in the table 4.
In the above process, the process of determining whether the value of the second identifier satisfies the preset parsing condition by the encoder is similar to the process of determining whether the value of the second identifier satisfies the preset parsing condition by the decoder in the above embodiment, which is specifically referred to in the above embodiment and is not described herein again. And then, when the value of the second identifier meets the preset analysis condition, the encoder carries the value of the first identifier of the corresponding fusion mode in the code stream and transmits the value to the decoder, so that the decoder can analyze the code stream to obtain the value of the first identifier, otherwise, the encoder does not need to carry the value of the first identifier in the code stream and transmits the value to the decoder.
S1004: and performing inter-frame prediction on the current image block by using a target fusion mode to obtain a prediction block of the current image block.
At this point, the encoder completes the inter prediction process for the current image block.
Based on the same inventive concept, the embodiments of the present application provide an inter-frame prediction apparatus, which can be applied to the video decoder described in the above embodiments.
Fig. 11 is a schematic structural diagram of an inter-frame prediction apparatus in an embodiment of the present application, and referring to fig. 11, the inter-frame prediction apparatus 1100 may include: a determining module 1101, configured to determine whether the current image block allows each of K candidate fusion modes to be used after determining that the current image block uses the fusion mode for inter-frame prediction, where K is a positive integer greater than or equal to 2; the analyzing module 1102 is configured to analyze the code stream to obtain a value of a first identifier of the current fusion mode when the current image block allows the current fusion mode to be used and the current image block allows a fusion mode other than the current fusion mode among the K candidate fusion modes to be used; a prediction module 1103, configured to perform inter prediction on the current image block using the current fusion mode to obtain a prediction block of the current image block, when the value of the first identifier indicates that the fusion mode in which the current image block performs inter prediction is the current fusion mode.
In some possible embodiments, the prediction module is further configured to perform inter prediction on the current image block using the current fusion mode to obtain a prediction block of the current image block, in a case that the current image block does not allow the use of a fusion mode other than the current fusion mode from the K candidate fusion modes.
In some possible embodiments, the determining module is configured to obtain a prediction parameter corresponding to a current image block; determining whether the current image block allows to use each fusion mode or not according to the prediction parameters; wherein the prediction parameters include one or more of: an indication of a syntax element of a superior video processing unit related to the current image block, a size of the current image block, indication information indicating whether the current image block has a residual, a type of the superior video processing unit.
In some possible embodiments, the superior video processing unit includes a slice in which the current image block is located, a slice group in which the current image block is located, an image in which the current image block is located, or a video sequence in which the current image block is located.
In some possible embodiments, the parsing module is configured to, in a case that the current tile block allows to use at least one of the MMVD mode, the SBMM, the CIIP mode, and the TPM, parse the current tile block to obtain a value of a regular _ merge _ flag in the conventional merge mode; wherein, the regular _ merge _ flag is a first flag of the conventional fusion mode.
In some possible embodiments, the parsing module is configured to, in a case that the MMVD mode is allowed to be used by the current tile, and the current tile is allowed to use at least one of the SBMM, the CIIP mode, and the TPM, parse the MMVD _ merge _ flag value of the MMVD mode from the code stream; and the MMVD _ merge _ flag is a first identifier of the MMVD mode.
In some possible embodiments, the parsing module is configured to, in a case that the current tile block allows the SBMM mode to be used, and the current tile block allows the CIIP mode and/or the TPM, parse the current tile block to obtain a value of merge _ sublock _ flag of the SBMM; and the merge _ sublock _ flag is a first identifier of the SBMM.
In some possible embodiments, the parsing module is configured to, under a condition that the current image block allows the CIIP mode and the TPM to be used, parse the value of a CIIP _ flag of the CIIP mode from the code stream; and the CIIP _ flag is a first identifier of the CIIP mode.
In some possible embodiments, the apparatus further comprises: and the derivation module is used for obtaining the value of the first identifier of the current fusion mode through derivation when the current image block does not allow the current fusion mode to be used or the current image block does not allow the fusion mode except the current fusion mode in the K alternative fusion modes to be used.
In some possible embodiments, the apparatus further comprises: and the derivation module is used for obtaining the value of the first identifier of the current fusion mode through derivation when the value of the first identifier of the current fusion mode cannot be obtained through analysis from the code stream.
In some possible embodiments, the current fusion mode is a conventional fusion mode, and the derivation module is configured to set general _ merge _ flag to a value of regular _ merge _ flag; or, setting the value of regular _ merge _ flag to a first value; the general _ merge _ flag is used to indicate whether an inter prediction parameter of a current image block is obtained from an adjacent inter prediction block, and the regular _ merge _ flag is a first identifier of a conventional fusion mode.
In some possible embodiments, the current fusion mode is an MMVD mode, and the derivation module is configured to set a value of a first flag MMVD _ merge _ flag of the MMVD mode to a first value when a first derivation condition is satisfied; wherein the first derivation condition includes: the current image block allows the MMVD mode to be used.
In some possible embodiments, the current fusion mode is SBMM, and the deriving module is configured to set a value of a first flag merge _ sublock _ flag of the SBMM to a first value if a second deriving condition is satisfied; wherein the second derivation condition includes: the current image block allows SBMM to be used.
In some possible embodiments, the current merging mode is a CIIP mode, and the derivation module is configured to set a value of a first flag CIIP _ flag of the CIIP mode to a first value when a third derivation condition is satisfied; wherein the third derivation condition includes: the current tile allows the CIIP mode to be used.
In some possible embodiments, the current fusion mode is a TPM, and the derivation module is configured to set a value of a first flag merge _ triangle _ flag of the TPM to a first value when a fourth derivation condition is satisfied; wherein the fourth derivation condition includes: the current image block allows the TPM to be used.
In some possible embodiments, the K candidate fusion modes include a plurality of: traditional fusion mode, MMVD mode, SBMM, CIIP mode, TPM.
Based on the same inventive concept, an embodiment of the present application provides a video decoder, configured to decode a picture block from a bitstream, including: the entropy decoding module is used for decoding an index identifier from the code stream, and the index identifier is used for indicating target candidate motion information of the current decoded image block; the inter-frame prediction apparatus according to any one of the above second aspects, wherein the inter-frame prediction apparatus is configured to predict motion information of a currently decoded image block based on target candidate motion information indicated by the index identifier, and determine a predicted pixel value of the currently decoded image block based on the motion information of the currently decoded image block; a reconstruction module for reconstructing the current decoded image block based on the predicted pixel values.
Based on the same inventive concept, an embodiment of the present application provides an apparatus for decoding video data, the apparatus including: the memory is used for storing video data in a code stream form; and the video decoder is used for decoding the video data from the code stream.
Based on the same inventive concept, an embodiment of the present application provides a decoding apparatus, including: a non-volatile memory and a processor coupled to each other, the processor calling program code stored in the memory to perform part or all of the steps of any one of the methods of the first aspect.
Based on the same inventive concept, embodiments of the present application provide a computer-readable storage medium storing program code, wherein the program code includes instructions for performing some or all of the steps of any one of the methods of the first aspect.
Based on the same inventive concept, embodiments of the present application provide a computer program product, which when run on a computer causes the computer to perform some or all of the steps of any one of the methods of the first aspect.
Those of skill in the art will appreciate that the functions described in connection with the various illustrative logical blocks, modules, and algorithm steps described in the disclosure herein may be implemented as hardware, software, firmware, or any combination thereof. If implemented in software, the functions described in the various illustrative logical blocks, modules, and steps may be stored on or transmitted over as one or more instructions or code on a computer-readable medium and executed by a hardware-based processing unit. The computer-readable medium may include a computer-readable storage medium, which corresponds to a tangible medium, such as a data storage medium, or any communication medium including a medium that facilitates transfer of a computer program from one place to another (e.g., according to a communication protocol). In this manner, a computer-readable medium may generally correspond to (1) a non-transitory tangible computer-readable storage medium, or (2) a communication medium, such as a signal or carrier wave. A data storage medium may be any available medium that can be accessed by one or more computers or one or more processors to retrieve instructions, code and/or data structures for implementing the techniques described herein. The computer program product may include a computer-readable medium.
By way of example, and not limitation, such computer-readable storage media can comprise RAM, ROM, EEPROM, CD-ROM or other optical disk storage, magnetic disk storage or other magnetic storage devices, flash memory, or any other medium that can be used to store desired program code in the form of instructions or data structures and that can be accessed by a computer. Also, any connection is properly termed a computer-readable medium. For example, if the instructions are transmitted from a website, server, or other remote source using a coaxial cable, fiber optic cable, twisted pair, Digital Subscriber Line (DSL), or wireless technologies such as infrared, radio, and microwave, then the coaxial cable, fiber optic cable, twisted pair, DSL, or wireless technologies such as infrared, radio, and microwave are included in the definition of medium. It should be understood, however, that the computer-readable storage media and data storage media do not include connections, carrier waves, signals, or other transitory media, but are instead directed to non-transitory tangible storage media. Disk and disc, as used herein, includes Compact Disc (CD), laser disc, optical disc, Digital Versatile Disc (DVD), and blu-ray disc where disks usually reproduce data magnetically, while discs reproduce data optically with lasers. Combinations of the above should also be included within the scope of computer-readable media.
The instructions may be executed by one or more processors, such as one or more Digital Signal Processors (DSPs), general purpose microprocessors, Application Specific Integrated Circuits (ASICs), field programmable logic arrays (FPGAs), or other equivalent integrated or discrete logic circuitry. Thus, the term "processor," as used herein may refer to any of the foregoing structure or any other structure suitable for implementation of the techniques described herein. Additionally, in some aspects, the functions described by the various illustrative logical blocks, modules, and steps described herein may be provided within dedicated hardware and/or software modules configured for encoding and decoding, or incorporated in a combined codec. Also, the techniques may be fully implemented in one or more circuits or logic elements.
The techniques of this application may be implemented in a wide variety of devices or apparatuses, including a wireless handset, an Integrated Circuit (IC), or a set of ICs (e.g., a chipset). Various components, modules, or units are described in this application to emphasize functional aspects of means for performing the disclosed techniques, but do not necessarily require realization by different hardware units. Indeed, as described above, the various units may be combined in a codec hardware unit, in conjunction with suitable software and/or firmware, or provided by an interoperating hardware unit (including one or more processors as described above).
In the foregoing embodiments, the descriptions of the respective embodiments have respective emphasis, and for parts that are not described in detail in a certain embodiment, reference may be made to related descriptions of other embodiments.
The above description is only an exemplary embodiment of the present application, but the scope of the present application is not limited thereto, and any changes or substitutions that can be easily conceived by those skilled in the art within the technical scope of the present application are intended to be covered by the scope of the present application. Therefore, the protection scope of the present application shall be subject to the protection scope of the claims.
Claims (34)
1. An inter-frame prediction method, comprising:
after determining that the current image block uses the fusion mode to perform inter-frame prediction, determining whether the current image block allows each of K alternative fusion modes to be used, wherein K is a positive integer greater than or equal to 2;
under the condition that the current image block allows to use a current fusion mode and the current image block allows to use a fusion mode except the current fusion mode in the K standby fusion modes, analyzing a code stream to obtain a value of a first identifier of the current fusion mode;
and under the condition that the value of the first identifier indicates that the fusion mode for inter-frame prediction of the current image block is the current fusion mode, performing inter-frame prediction on the current image block by using the current fusion mode to obtain a prediction block of the current image block.
2. The method of claim 1, further comprising:
and under the condition that the current image block does not allow the use of a fusion mode of the K alternative fusion modes except the current fusion mode, performing inter-frame prediction on the current image block by using the current fusion mode to obtain a prediction block of the current image block.
3. The method according to claim 1, wherein the determining whether the current image block allows using each of K candidate fusion modes comprises:
acquiring a prediction parameter corresponding to the current image block;
determining whether the current image block allows the use of each fusion mode according to the prediction parameters;
wherein the prediction parameters include one or more of: an indication of a syntax element of a superior video processing unit related to the current image block, a size of the current image block, indication information indicating whether the current image block has a residual, a type of the superior video processing unit.
4. The method according to claim 3, wherein the higher level video processing unit comprises a slice in which the current image block is located, a slice group in which the current image block is located, an image in which the current image block is located, or a video sequence in which the current image block is located.
5. The method according to any one of claims 1 to 4, wherein, in a case that the current tile is allowed to use a current fusion mode, and the current tile is allowed to use a fusion mode other than the current fusion mode among the K candidate fusion modes, parsing from a code stream to obtain a value of the first identifier of the current fusion mode includes:
under the condition that the current image block allows to use at least one of an MMVD mode, an SBMM, a CIIP mode and a TPM, analyzing and obtaining a regular _ merge _ flag value of the traditional fusion mode from a code stream;
wherein, the regular _ merge _ flag is a first flag of the conventional fusion mode.
6. The method according to any one of claims 1 to 4, wherein, in a case that the current tile is allowed to use a current fusion mode, and the current tile is allowed to use a fusion mode other than the current fusion mode among the K candidate fusion modes, parsing from a code stream to obtain a value of the first identifier of the current fusion mode includes:
under the condition that the current image block allows to use the MMVD mode and the current image block allows to use at least one of the SBMM, the CIIP mode and the TPM, analyzing and obtaining the value of MMVD _ merge _ flag of the MMVD mode from a code stream;
and the MMVD _ merge _ flag is a first identifier of the MMVD mode.
7. The method according to any one of claims 1 to 4, wherein, in a case that the current tile is allowed to use a current fusion mode, and the current tile is allowed to use a fusion mode other than the current fusion mode among the K candidate fusion modes, parsing from a code stream to obtain a value of the first identifier of the current fusion mode includes:
under the condition that the current image block allows to use the SBMM mode and the current image block allows to use the CIIP mode and/or the TPM, analyzing from a code stream to obtain a merge _ sub _ flag value of the SBMM;
and the merge _ sublock _ flag is a first identifier of the SBMM.
8. The method according to any one of claims 1 to 4, wherein, in a case that the current tile is allowed to use a current fusion mode, and the current tile is allowed to use a fusion mode other than the current fusion mode among the K candidate fusion modes, parsing from a code stream to obtain a value of the first identifier of the current fusion mode includes:
under the condition that the current image block allows using a CIIP mode and a TPM, analyzing from a code stream to obtain a value of a CIIP _ flag of the CIIP mode;
and the CIIP _ flag is a first identifier of the CIIP mode.
9. The method according to any one of claims 1 to 8, further comprising:
and when the current image block does not allow the current fusion mode to be used, or the current image block does not allow the fusion mode except the current fusion mode in the K alternative fusion modes to be used, obtaining a value of a first identifier of the current fusion mode through derivation.
10. The method according to any one of claims 1 to 9, further comprising:
and when the value of the first identifier of the current fusion mode cannot be obtained by analyzing the code stream, the value of the first identifier of the current fusion mode is obtained by deduction.
11. The method according to claim 10 or 11, wherein the current fusion mode is a legacy fusion mode, and the deriving a value of the first identifier of the current fusion mode comprises:
setting general _ merge _ flag to the value of regular _ merge _ flag; or,
setting a value of regular _ merge _ flag to a first value;
the general _ merge _ flag is used to indicate whether an inter prediction parameter of a current image block is obtained from an adjacent inter prediction block, and the regular _ merge _ flag is a first identifier of a conventional fusion mode.
12. The method according to claim 10 or 11, wherein the current fusion mode is an MMVD mode, and the deriving a value of the first identifier of the current fusion mode comprises:
setting the value of a first identification MMVD _ merge _ flag of the MMVD mode to a first value in case that a first derivation condition is satisfied;
wherein the first derivation condition includes: the current image block allows the MMVD mode to be used.
13. The method according to claim 10 or 11, wherein the current fusion mode is SBMM, and the deriving the value of the first identifier of the current fusion mode comprises:
under the condition that a second derivation condition is met, setting the value of a first identification merge _ sublock _ flag of the SBMM as a first value;
wherein the second derivation condition includes: the current image block allows using the SBMM.
14. The method according to claim 10 or 11, wherein the current merging mode is a CIIP mode, and the deriving a value of the first identifier of the current merging mode comprises:
under the condition that a third derivation condition is met, setting the value of a first identifier CIIP _ flag of the CIIP mode as a first value;
wherein the third derivation condition includes: the current image block allows the CIIP mode to be used.
15. The method according to claim 10 or 11, wherein the current fusion mode is TPM, and the obtaining the value of the first identifier of the current fusion mode by derivation comprises:
under the condition that a fourth derivation condition is met, setting the value of a first identification merge _ triangle _ flag of the TPM to be a first value;
wherein the fourth derivation condition includes: the current tile allows the use of the TPM.
16. The method according to any one of claims 1 to 15, wherein the K candidate fusion modes include a plurality of: traditional fusion mode, MMVD mode, SBMM, CIIP mode, TPM.
17. An inter-frame prediction apparatus, comprising:
the determining module is used for determining whether the current image block is allowed to use each fusion mode in K alternative fusion modes after determining that the current image block uses the fusion mode for inter-frame prediction, wherein K is a positive integer greater than or equal to 2;
the analysis module is used for analyzing and obtaining a value of a first identifier of the current fusion mode from a code stream under the condition that the current image block allows the current fusion mode to be used and the current image block allows the fusion mode except the current fusion mode in the K alternative fusion modes to be used;
and the prediction module is used for performing inter prediction on the current image block by using the current fusion mode to obtain a prediction block of the current image block under the condition that the value of the first identifier indicates that the fusion mode for performing inter prediction on the current image block is the current fusion mode.
18. The apparatus of claim 17, wherein the prediction module is further configured to inter-predict the current tile using the current fusion mode to obtain a prediction block of the current tile if the current tile does not allow the current tile to use a fusion mode other than the current fusion mode from the K candidate fusion modes.
19. The apparatus according to claim 17, wherein the determining module is configured to obtain a prediction parameter corresponding to the current image block; determining whether the current image block allows the use of each fusion mode according to the prediction parameters; wherein the prediction parameters include one or more of: an indication of a syntax element of a superior video processing unit related to the current image block, a size of the current image block, indication information indicating whether the current image block has a residual, a type of the superior video processing unit.
20. The apparatus of claim 19, wherein the higher level video processing unit comprises a slice in which the current tile is located, a slice group in which the current tile is located, an image in which the current tile is located, or a video sequence in which the current tile is located.
21. The apparatus according to any one of claims 17 to 20, wherein the parsing module is configured to, in a case that the current tile block allows at least one of MMVD mode, SBMM, CIIP mode, and TPM, parse from a bitstream to obtain a value of a regular _ merge _ flag of the legacy merge mode; wherein, the regular _ merge _ flag is a first flag of the conventional fusion mode.
22. The apparatus according to any one of claims 17 to 20, wherein the parsing module is configured to, in a case that the current tile is allowed to use the MMVD mode, and the current tile is allowed to use at least one of the SBMM, the CIIP mode, and the TPM, parse from the bitstream to obtain a value of MMVD _ merge _ flag of the MMVD mode; and the MMVD _ merge _ flag is a first identifier of the MMVD mode.
23. The apparatus according to any one of claims 17 to 20, wherein the parsing module is configured to, in a case that the current tile is allowed to use SBMM mode, and the current tile is allowed to use CIIP mode and/or TPM, parse the current tile to obtain a value of merge _ sub _ flag of the SBMM; and the merge _ sublock _ flag is a first identifier of the SBMM.
24. The apparatus according to any one of claims 17 to 20, wherein the parsing module is configured to, in a case that the current tile block allows using a CIIP mode and a TPM, parse from a codestream to obtain a value of a CIIP _ flag of the CIIP mode; and the CIIP _ flag is a first identifier of the CIIP mode.
25. The apparatus of any one of claims 17 to 24, further comprising: and the derivation module is configured to, when the current image block is not allowed to use the current fusion mode, or the current image block is not allowed to use a fusion mode other than the current fusion mode among the K candidate fusion modes, obtain a value of the first identifier of the current fusion mode by derivation.
26. The apparatus of any one of claims 17 to 24, further comprising: and the derivation module is used for obtaining the value of the first identifier of the current fusion mode through derivation when the value of the first identifier of the current fusion mode cannot be obtained through analysis from the code stream.
27. The apparatus according to claim 25 or 26, wherein the current fusion mode is a legacy fusion mode, and the derivation module is configured to set general _ merge _ flag to a value of regular _ merge _ flag; or, setting the value of regular _ merge _ flag to a first value; the general _ merge _ flag is used to indicate whether an inter prediction parameter of a current image block is obtained from an adjacent inter prediction block, and the regular _ merge _ flag is a first identifier of a conventional fusion mode.
28. The apparatus according to claim 25 or 26, wherein the current merging mode is an MMVD mode, and the derivation module is configured to set a value of a first flag MMVD _ merge _ flag of the MMVD mode to a first value if a first derivation condition is satisfied; wherein the first derivation condition includes: the current image block allows the MMVD mode to be used.
29. The apparatus according to claim 25 or 26, wherein the current convergence mode is SBMM, and the deriving module is configured to set a first flag merge _ sublock _ flag value of SBMM to a first value if a second deriving condition is satisfied; wherein the second derivation condition includes: the current image block allows using the SBMM.
30. The apparatus according to claim 25 or 26, wherein the current merging mode is a CIIP mode, and the deriving module is configured to set a value of a first flag CIIP _ flag of the CIIP mode to a first value if a third deriving condition is satisfied; wherein the third derivation condition includes: the current image block allows the CIIP mode to be used.
31. The apparatus according to claim 25 or 26, wherein the current fusion mode is TPM, and the derivation module is configured to set a value of a first flag merge _ triangle _ flag of TPM to a first value if a fourth derivation condition is satisfied; wherein the fourth derivation condition includes: the current tile allows the use of the TPM.
32. The apparatus according to any one of claims 17 to 31, wherein the K candidate fusion modes comprise a plurality of: traditional fusion mode, MMVD mode, SBMM, CIIP mode, TPM.
33. A video decoder for decoding a picture block from a bitstream, comprising:
the entropy decoding module is used for decoding an index identifier from the code stream, wherein the index identifier is used for indicating target candidate motion information of the current decoded image block;
the inter prediction device of any of claims 17 to 32, the inter prediction device to predict motion information of the current decoded picture block based on target candidate motion information indicated by the index identification, determine a predicted pixel value of the current decoded picture block based on the motion information of the current decoded picture block;
a reconstruction module to reconstruct the current decoded image block based on the predicted pixel values.
34. A video decoding device, comprising: a non-volatile memory and a processor coupled to each other, the processor calling program code stored in the memory to perform the method as described in any one of claims 1 to 17.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202410646140.XA CN118631998A (en) | 2019-06-25 | 2019-07-04 | Inter-frame prediction method and device |
| CN202410634304.7A CN118631997A (en) | 2019-06-25 | 2019-07-04 | Inter-frame prediction method and device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2019105546857 | 2019-06-25 | ||
| CN201910554685 | 2019-06-25 |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202410646140.XA Division CN118631998A (en) | 2019-06-25 | 2019-07-04 | Inter-frame prediction method and device |
| CN202410634304.7A Division CN118631997A (en) | 2019-06-25 | 2019-07-04 | Inter-frame prediction method and device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112135129A true CN112135129A (en) | 2020-12-25 |
| CN112135129B CN112135129B (en) | 2024-06-04 |
Family
ID=73849568
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202410634304.7A Pending CN118631997A (en) | 2019-06-25 | 2019-07-04 | Inter-frame prediction method and device |
| CN201910600591.9A Active CN112135129B (en) | 2019-06-25 | 2019-07-04 | Inter-frame prediction method and device |
| CN202410646140.XA Pending CN118631998A (en) | 2019-06-25 | 2019-07-04 | Inter-frame prediction method and device |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202410634304.7A Pending CN118631997A (en) | 2019-06-25 | 2019-07-04 | Inter-frame prediction method and device |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202410646140.XA Pending CN118631998A (en) | 2019-06-25 | 2019-07-04 | Inter-frame prediction method and device |
Country Status (1)
| Country | Link |
|---|---|
| CN (3) | CN118631997A (en) |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006047936A1 (en) * | 2004-11-02 | 2006-05-11 | Huawei Technologies Co., Ltd. | A method for determining the condition in zero block prejudgment and for prejudging zero block |
| CN103079072A (en) * | 2013-01-15 | 2013-05-01 | 清华大学 | Inter-frame prediction method, encoding equipment and decoding equipment |
| US20160100189A1 (en) * | 2014-10-07 | 2016-04-07 | Qualcomm Incorporated | Intra bc and inter unification |
| CN105493505A (en) * | 2014-06-19 | 2016-04-13 | 微软技术许可有限责任公司 | Unified intra block copy and inter prediction modes |
| US20160234492A1 (en) * | 2015-02-11 | 2016-08-11 | Qualcomm Incorporated | Coding tree unit (ctu) level adaptive loop filter (alf) |
| CN108370441A (en) * | 2015-11-12 | 2018-08-03 | Lg 电子株式会社 | Method and apparatus in image compiling system for intra prediction caused by coefficient |
| CN109076237A (en) * | 2015-11-18 | 2018-12-21 | 联发科技股份有限公司 | The method and apparatus of the intra prediction mode of intra-frame prediction filtering device are used in video and compression of images |
| CN109587479A (en) * | 2017-09-29 | 2019-04-05 | 华为技术有限公司 | Inter-frame prediction method, device and the codec of video image |
| CN109756737A (en) * | 2017-11-07 | 2019-05-14 | 华为技术有限公司 | Image prediction method and apparatus |
| GB201904969D0 (en) * | 2019-04-08 | 2019-05-22 | Canon Kk | Residual signalling |
-
2019
- 2019-07-04 CN CN202410634304.7A patent/CN118631997A/en active Pending
- 2019-07-04 CN CN201910600591.9A patent/CN112135129B/en active Active
- 2019-07-04 CN CN202410646140.XA patent/CN118631998A/en active Pending
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006047936A1 (en) * | 2004-11-02 | 2006-05-11 | Huawei Technologies Co., Ltd. | A method for determining the condition in zero block prejudgment and for prejudging zero block |
| CN103079072A (en) * | 2013-01-15 | 2013-05-01 | 清华大学 | Inter-frame prediction method, encoding equipment and decoding equipment |
| CN105493505A (en) * | 2014-06-19 | 2016-04-13 | 微软技术许可有限责任公司 | Unified intra block copy and inter prediction modes |
| US20160100189A1 (en) * | 2014-10-07 | 2016-04-07 | Qualcomm Incorporated | Intra bc and inter unification |
| US20160234492A1 (en) * | 2015-02-11 | 2016-08-11 | Qualcomm Incorporated | Coding tree unit (ctu) level adaptive loop filter (alf) |
| CN108370441A (en) * | 2015-11-12 | 2018-08-03 | Lg 电子株式会社 | Method and apparatus in image compiling system for intra prediction caused by coefficient |
| US20180343455A1 (en) * | 2015-11-12 | 2018-11-29 | Lg Electronics Inc. | Method and apparatus for coefficient induced intra prediction in image coding system |
| CN109076237A (en) * | 2015-11-18 | 2018-12-21 | 联发科技股份有限公司 | The method and apparatus of the intra prediction mode of intra-frame prediction filtering device are used in video and compression of images |
| CN109587479A (en) * | 2017-09-29 | 2019-04-05 | 华为技术有限公司 | Inter-frame prediction method, device and the codec of video image |
| CN109756737A (en) * | 2017-11-07 | 2019-05-14 | 华为技术有限公司 | Image prediction method and apparatus |
| GB201904969D0 (en) * | 2019-04-08 | 2019-05-22 | Canon Kk | Residual signalling |
Non-Patent Citations (1)
| Title |
|---|
| PHILIPPE HANHART 等: "On internal QP increase for bitrate matching", 《JOINT COLLABORATIVE TEAM ON VIDEO CODING (JCT-VC) OF ITU-T SG 16 WP 3 AND ISO/IEC JTC 1/SC 29/WG 11》, pages 1 - 3 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN118631997A (en) | 2024-09-10 |
| CN112135129B (en) | 2024-06-04 |
| CN118631998A (en) | 2024-09-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111277828B (en) | Video encoding and decoding method, video encoder and video decoder | |
| CN113491132B (en) | Video image decoding method, video image encoding method, video image decoding device, video image encoding device, and readable storage medium | |
| CN111953995A (en) | Method and device for inter-frame prediction | |
| CN112204962B (en) | Image prediction method, apparatus and computer-readable storage medium | |
| CN113170176B (en) | Video encoder, video decoder and corresponding methods | |
| CN111788833B (en) | Inter-frame prediction method and device and corresponding encoder and decoder | |
| CN112055200A (en) | MPM list construction method, and chroma block intra-frame prediction mode acquisition method and device | |
| CN111526362A (en) | Inter-frame prediction method and device | |
| CN113366850B (en) | Video encoder, video decoder and corresponding methods | |
| CN111263166B (en) | Video image prediction method and device | |
| CN111277840B (en) | Transform method, inverse transform method, video encoder and video decoder | |
| CN112135137A (en) | Video encoder, video decoder and corresponding methods | |
| CN112118447A (en) | Construction method and device of fusion candidate motion information list and coder/decoder | |
| CN111294603B (en) | Video encoding and decoding method and device | |
| CN111726617A (en) | Optimization method and device for fusion motion vector difference technology and coder-decoder | |
| CN112135129B (en) | Inter-frame prediction method and device | |
| CN111726630B (en) | Processing method and device based on triangular prediction unit mode | |
| WO2020186882A1 (en) | Triangle prediction unit mode-based processing method and device | |
| CN113615191A (en) | Method and device for determining image display sequence and video coding and decoding equipment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |