CN112068577A - 一种uuv集群中uuv个体的绿色动态控位方法 - Google Patents
一种uuv集群中uuv个体的绿色动态控位方法 Download PDFInfo
- Publication number
- CN112068577A CN112068577A CN202011015811.0A CN202011015811A CN112068577A CN 112068577 A CN112068577 A CN 112068577A CN 202011015811 A CN202011015811 A CN 202011015811A CN 112068577 A CN112068577 A CN 112068577A
- Authority
- CN
- China
- Prior art keywords
- uuv
- control
- energy consumption
- level
- working area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 44
- 238000005265 energy consumption Methods 0.000 claims abstract description 58
- 230000008569 process Effects 0.000 claims abstract description 16
- 230000015572 biosynthetic process Effects 0.000 claims abstract description 6
- 238000013461 design Methods 0.000 claims abstract description 5
- 239000002245 particle Substances 0.000 claims description 56
- 238000005457 optimization Methods 0.000 claims description 32
- 230000006870 function Effects 0.000 claims description 24
- 230000009471 action Effects 0.000 claims description 13
- 238000012937 correction Methods 0.000 claims description 13
- 230000001133 acceleration Effects 0.000 claims description 12
- 238000005096 rolling process Methods 0.000 claims description 10
- 230000007613 environmental effect Effects 0.000 claims description 7
- 230000007246 mechanism Effects 0.000 claims description 6
- 239000000178 monomer Substances 0.000 claims description 6
- 238000005070 sampling Methods 0.000 claims description 6
- 238000000354 decomposition reaction Methods 0.000 claims description 3
- 238000011156 evaluation Methods 0.000 claims description 3
- 230000004044 response Effects 0.000 claims description 3
- 238000003786 synthesis reaction Methods 0.000 claims description 3
- 230000005855 radiation Effects 0.000 abstract description 5
- 238000011217 control strategy Methods 0.000 abstract description 4
- 238000001514 detection method Methods 0.000 description 7
- 230000009286 beneficial effect Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 238000011160 research Methods 0.000 description 2
- 239000013535 sea water Substances 0.000 description 2
- 230000008859 change Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000012938 design process Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000009191 jumping Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
Images

Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/04—Control of altitude or depth
- G05D1/06—Rate of change of altitude or depth
- G05D1/0692—Rate of change of altitude or depth specially adapted for under-water vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Feedback Control In General (AREA)
Abstract
本发明属于UUV集群动态控位技术领域,具体涉及一种UUV集群中UUV个体的绿色动态控位方法。本发明针对UUV在不同工作阶段的不同需求,分层设计了UUV的绿色动态控位控制方案,使UUV在不同的状态下,都具有一套与之相适应的控制策略,能适时改变动态控位的控制曲线,最终达到以较低的能耗及较低的推进器辐射噪声完成任务的目的,同时尽可能地保持UUV集群的基本队形拓扑结构。本发明的解决了UUV集群在动态控位过程中由于能耗较大而无法实现长时间待机值守并保持阵型的问题,实现UUV以尽可能少的功耗、尽可能低的UUV推进器动车频率、尽可能小的辐射噪声、尽可能久的作业时间,完成其动态控位控制。
Description
技术领域
本发明属于UUV集群动态控位技术领域,具体涉及一种UUV集群中UUV个体的绿色动态控位方法。
背景技术
UUV的动态控位是指其依靠自身推进器产生的推进力(矩)抵抗外界干扰以保持位姿, UUV集群在执行水下区域值守等协同观、探测任务时,需要在较长的一段时间内保持动态控 位状态。在动态控位时,UUV推进器频繁动车是电量消耗的主要部分。因此设计一种UUV 集群的绿色动态控位(Green-DP)方法,可以降低UUV集群的能量消耗,提高作业时的隐蔽 性,增加待机值守以及作业时间,对UUV集群的动态控位是十分必要的。
对现有的技术文献检索发现,目前国内外对于绿色动态控位的研究多集中于单体船舶上, 且绿色控制策略主要体现在环境补偿器、预测控制器、最优艏向、推力分配优化几方面,武 汉船用电力推进装置研究所刘凯等在《船电技术》(2018年09期)发表的文章《动态控位船 舶推力优化分配研究》针对船舶处于环境力较小而方向频繁变化的特殊海洋环境中定位作业 的推力分配问题,采用组合偏置策略,并针对组合偏置后存在能量消耗过大的问题,提出了基于 能耗最优的二次推力分配方法;挪威Kongsberg公司的Green-DP系统通过划分作业区域以及 采用环境补偿器、模型预测控制器的办法成功降低了推进器工作频率,达到了减少能耗的效 果,但是以上办法均适用于单体船舶而非UUV集群,即未考虑到集群的阵型保持问题,当 UUV集群缺少风、浪、流传感器时以上方法也无法使其有效地完成动态控位任务,且未能针 对UUV在不同工作阶段的不同需求对控制方案进行分层设计。
发明内容
本发明的目的在于解决UUV集群在动态控位过程中由于能耗较大而无法实现长时间待 机值守并保持阵型的问题,提供一种UUV集群中UUV个体的绿色动态控位方法。
本发明的目的通过如下技术方案来实现:包括以下步骤:
步骤1:根据作业任务要求,设定UUV在定深处航行时在作业区域的目标定位点,记录 该目标定位点的经度、纬度以及航向信息;
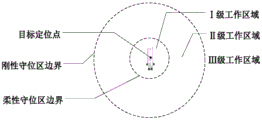
步骤2:在水平面内,以UUV目标定位点为圆心,分别以R1和R2为半径作圆,将作业区域划分为Ⅰ级工作区域、Ⅱ级工作区域和Ⅲ级工作区域;半径R1和R2根据作业任务要求设定,且R1<R2;所述的Ⅰ级工作区域为以UUV目标定位点为圆心,以R1为半径的圆形区域; 所述的Ⅱ级工作区域为以UUV目标定位点为圆心,以R1和R2为半径的两个圆形之间的圆环 区域;作业区域内除Ⅰ级工作区域和Ⅱ级工作区域以外的部分均为Ⅲ级工作区域;
步骤3:开始动态控位任务,实时在线更新UUV的运动状态信息,记录UUV当前经度、纬度、航向、速度以及各控制量信息;根据UUV当前位置与目标定位点的经纬度信息,实 时计算两点间距离r;
步骤4:判断UUV是否处于Ⅲ级工作区域:若r≤R2,则判定UUV不处于Ⅲ级工作区域,执行步骤5;否则,UUV采取Ⅲ级控制模式,以最小能耗指标,使用粒子群算法计算UUV 位置和航向的全局最优规划方案;
步骤5:判断UUV是否处于Ⅱ级工作区域:若r<R1,则判定UUV不处于Ⅱ级工作区域, 执行步骤6;否则,UUV采取Ⅱ级控制模式,按偏差指标,使用模型预测控制算法,实时滚动求解UUV位置和航向的最优控制量;
步骤6:若UUV收到任务结束指令,则UUV结束任务;否则,UUV采取Ⅰ级控制模式, 按偏差指标,使用模型预测控制算法,实时滚动求解UUV航向的最优控制量,对位置不进 行控制,并在每一拍求解出UUV航向的最优控制量后跳转至步骤3。
本发明还可以包括:
所述的步骤4中UUV采取Ⅲ级控制模式,以最小能耗指标,使用粒子群算法计算UUV位置和航向的全局最优规划方案的方法具体为:
设定UUV的运动包含匀加速-匀速-匀减速三段,UUV到达目标定位点时的速度为0;待 优化的单目标函数为:

其中,τ1和τ2为权重系数;ρ为海水密度; 为海流对UUV纵向上产生的干扰力;
为海流对UUV纵向上产生的干扰力; 为海流对UUV横向上产生的干扰力;αc为海流相对UUV的流向角; CX(αc)为流向角αc对应的纵向海流阻力系数;CY(αc)为流向角αc对应的横向海流阻力系数;ATS为UUV纵向迎流面积;ALS为UUV横向迎流面积;Vc为海流速度;sx为UUV在海流作 用下沿x轴的航行距离;sy为UUV在海流作用下沿y轴的航行距离;l为UUV初始位置距 目标定位点的距离;
为海流对UUV横向上产生的干扰力;αc为海流相对UUV的流向角; CX(αc)为流向角αc对应的纵向海流阻力系数;CY(αc)为流向角αc对应的横向海流阻力系数;ATS为UUV纵向迎流面积;ALS为UUV横向迎流面积;Vc为海流速度;sx为UUV在海流作 用下沿x轴的航行距离;sy为UUV在海流作用下沿y轴的航行距离;l为UUV初始位置距 目标定位点的距离;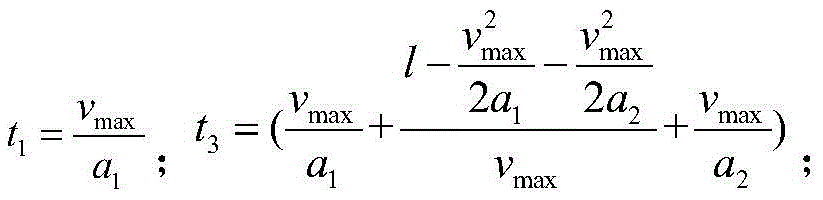 待优化求解的变量为a1、a2、vmax; vmax为UUV匀速段的速度;
待优化求解的变量为a1、a2、vmax; vmax为UUV匀速段的速度;
根据上述目标函数,利用粒子群算法对其进行优化求解,将种群大小、各粒子的分布位 置和飞行速度作为系统输入;粒子的速度和位置的更新公式为:


其中,c1,c2为学习因子;ω为惯性因子;具体步骤如下:
步骤4.1:将设定的初始化种群大小,随机初始化各粒子的分布位置和飞行速度;
步骤4.2:根据以能耗为评价指标的目标函数J,计算所有粒子当前位置的能耗指标,并 记录在每个粒子的 中;比较每个粒子的能耗指标大小,将当前整个群体中的最优个 体的能耗指标最优值及该个体的位置存储在gbest中;
中;比较每个粒子的能耗指标大小,将当前整个群体中的最优个 体的能耗指标最优值及该个体的位置存储在gbest中;
步骤4.3:根据粒子更新公式,更新各粒子的位置及速度,并重新计算新产生粒子的能耗 指标;
步骤4.4:比较各个粒子的能耗指标和前一个存储下来的pbest大小,若当前粒子的能耗 指标更小,则更新pbest为当前能耗指标;
步骤4.5:比较当前迭代过程获得的所有pbest和上一个迭代周期记录的gbest,若存在当 前的pbest比上一个迭代周期的gbest更优,更新gbest为该pbest;
步骤4.6:循环进行步骤4.3和步骤4.4,直到满足终止条件;
上述粒子群优化过程,最终输出为拥有最小能耗指标的粒子,再由粒子群寻优得到的最 优能耗指标,得出UUV在距离目标定位点较远距离时,UUV速度及加速度的最优规划方案; 由上述关于加速度的最优规划方案,可推知UUV在各阶段受到的合外力大小,再结合已知 的环境信息及力的分解与合成原理,可求得相应阶段的UUV推力规划方案,保持执行该方 案对UUV位置和航向均进行控制,直至UUV进入Ⅱ级工作区域。
所述的步骤5中UUV采取Ⅱ级控制模式,按偏差指标,使用模型预测控制算法,实时滚动求解UUV位置和航向的最优控制量的方法具体为:
各UUV单体的一般运动形式为低速运动,机动性要求较弱,并且UUV的运动趋势可以 根据自身的当前状态、执行机构的输出以及由传感器所感知的环境信息进行适当估计,以控 制偏差作为输入,执行机构控制量作为输出;采用改进的广义预测控制考虑UUVⅡ级工作区 域动态控位的控制器设计;性能指标函数为:

其中,R1、R2分别为柔性守位区和刚性守位区半径,R1<R2;C1、C2为根据经验设定的常数,C1<C2;n为预测长度,s为控制长度,1<n,s≤n;λ为控制加权系数;y(k)为实 际输出的控制量;y(k+j)为UUV的未来输出控制量;Δu(k+j)=0,j=h,…,n,表示s个节 拍后控制量不再产生变化;yd为系统给定的期望状态;Ta为系统的采样周期;
利用粒子群优化算法,求解上述性能指标函数的最小值,得到优选的控制序列:
ΔU=[Δu(k),Δu(k+1),…,Δu(k+s-1)]T
由于每次对UUV实施上述控制时,只采用了控制序列ΔU中的第一个控制量Δu(k),故 可采用下式对UUV未来时刻的输出进行预测:

其中, 表示在t=kT时刻,有Δu(k)作用下的未来p个时刻UUV控制系统预测的控制 输出,
表示在t=kT时刻,有Δu(k)作用下的未来p个时刻UUV控制系统预测的控制 输出, Yp0表示在t=kT时刻,无Δu(k)作用下的未来p个 时刻UUV控制系统预测的控制输出,Yp0=[y0(k+1),y0(k+2),…,y0(k+p)]T; a=[a1,a2,…,ap]T为在各采样时刻,单位阶跃响应的值;
Yp0表示在t=kT时刻,无Δu(k)作用下的未来p个 时刻UUV控制系统预测的控制输出,Yp0=[y0(k+1),y0(k+2),…,y0(k+p)]T; a=[a1,a2,…,ap]T为在各采样时刻,单位阶跃响应的值;
由于UUV协同观探测任务环境及UUV本身的模型不确定性,在k个时刻的控制输出作 用后,UUV在k+1时刻的实际控制输出y(k+1)与预测的系统输出 并不一定相等,因此就构成预测误差:
并不一定相等,因此就构成预测误差:

根据以上预测误差对其他未来时刻的预测值进行加权修正,得到:

其中, 是在t=(k+1)T时刻,经过预测误差校正后预测的t=(k+1)T时刻的控制输出量,
是在t=(k+1)T时刻,经过预测误差校正后预测的t=(k+1)T时刻的控制输出量,  h为预测误差校正矢量,h=[h1,h2,…,hp]T,h1=1;
h为预测误差校正矢量,h=[h1,h2,…,hp]T,h1=1;
将经反馈校正后的 作为UUV广义预测动态控位系统下一时刻的预测初值,则由于在 预测t=(k+2)T,…,t=(k+p+1)T时刻的输出值时利用了t=(k+1)T时刻的控制预测初值, 因此令
作为UUV广义预测动态控位系统下一时刻的预测初值,则由于在 预测t=(k+2)T,…,t=(k+p+1)T时刻的输出值时利用了t=(k+1)T时刻的控制预测初值, 因此令

可由上式对得出下一时刻的预测值,在进行过Δu(k)控制作用后,采集k+1时刻的控制 输出信息,并开始新一轮的预测、校正、优化,使得该UUV动态控位系统成为了一个闭环 的负反馈系统;由实时持续输出的UUV执行机构控制量,对UUV的位置、航行进行实时控制,直到UUV到达Ⅰ级工作区域内的目标定位点。
本发明的有益效果在于:
本发明针对UUV在不同工作阶段的不同需求,分层设计了UUV的绿色动态控位控制方 案,使UUV在不同的状态下,都具有一套与之相适应的控制策略,能适时改变动态控位的控制曲线,最终达到以较低的能耗及较低的推进器辐射噪声完成任务的目的,同时尽可能地 保持UUV集群的基本队形拓扑结构,使UUV集群完成协同观探测任务。
附图说明
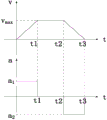
图1为本发明中基于粒子群寻优的UUV加速度规划方案示意图。
图2为本发明中UUV集群内单体UUV工作区域的划分示意图。
图3为本发明的总体流程图。
具体实施方式
下面结合附图对本发明做进一步描述。
本发明涉及面向协同观探测任务的一种UUV集群中UUV个体的绿色动态控位方法。本 发明的目的是为了解决UUV集群在动态控位过程中由于能耗较大而无法实现长时间待机值 守并保持阵型的问题,本发明提供一种适用于式UUV同构集群中各个群员的面向协同观探 测任务的UUV集群绿色动态控位方法。实现UUV以尽可能少的功耗、尽可能低的UUV推进器动车频率、尽可能小的辐射噪声、尽可能久的作业时间,完成其动态控位控制。
一种UUV集群中UUV个体的绿色动态控位方法,包括以下步骤:
步骤1:根据作业任务要求,设定UUV在定深处航行时在作业区域的目标定位点,记录 该目标定位点的经度、纬度以及航向信息;
步骤2:在水平面内,以UUV目标定位点为圆心,分别以R1和R2为半径作圆,将作业区域划分为Ⅰ级工作区域、Ⅱ级工作区域和Ⅲ级工作区域;半径R1和R2根据作业任务要求设定,且R1<R2;所述的Ⅰ级工作区域为以UUV目标定位点为圆心,以R1为半径的圆形区域; 所述的Ⅱ级工作区域为以UUV目标定位点为圆心,以R1和R2为半径的两个圆形之间的圆环 区域;作业区域内除Ⅰ级工作区域和Ⅱ级工作区域以外的部分均为Ⅲ级工作区域;
步骤3:开始动态控位任务,实时在线更新UUV的运动状态信息,记录UUV当前经度、纬度、航向、速度以及各控制量信息;根据UUV当前位置与目标定位点的经纬度信息,实 时计算两点间距离r;
步骤4:判断UUV是否处于Ⅲ级工作区域:若r≤R2,则判定UUV不处于Ⅲ级工作区域,执行步骤5;否则,UUV采取Ⅲ级控制模式,以最小能耗指标,使用粒子群算法计算UUV 位置和航向的全局最优规划方案;
UUV动态控位过程中的优化目标函数主要考虑UUV的运动消耗及机械损耗两部分,其 中运动消耗包括UUV从当前点到目标定位点的直线距离运动做功Em及克服海流作用力做的 功Ec;机械损耗是由UUV机械结构的机械效率带来的,是一个关于时间的函数,待优化目 标为UUV运动过程能耗与UUV机械损耗总和,由此可得优化目标的两个子函数:
f1=E(v)=Em+Ec (1)
f2=kT(v) (2)
其中f1代表了UUV的运动耗能,f2代表了系统的作用时间,设k为机械的损耗系数。设海流为匀速定向定常流,UUV通过水平辅推将横向上的海流作用力分解抵消,航向朝向目标定位点方向并保持该方向,随后过程中无需UUV转艏改变方向,则横向上水平辅推保持原推力以抵消海流作用,纵向上粒子群算法求解出的最优速度及加速度规划方案如图1所示。
为了使UUV的运动规划尽可能地与实际贴合并避免加速度的频繁变化,设定UUV的运 动包含匀加速-匀速-匀减速三段。为了避免超调冲击,设定UUV到达目标定位点时的速度为 0,且总航程距离等于初始点与目标点间的距离。UUV克服海流做功Ec包含其在x轴、y轴 两个方向的能耗Ex、Ey。设UUV在动态控位过程中其最大运动速度为vmax,则UUV从当 前点到目标定位点的直线距离运动做功Em只与UUV质量m及最大运动速度vmax有关,式(1) 及式(2)可进一步写成:

f2=kt3 (4)

设定UUV运动的总距离,即为UUV初始位置距目标定位点的距离l,且到达终点时要求UUV速度为0。则可得到以下约束条件,其中amax由UUV推进器基本参数计算获得:
根据上述内容,通过权重系数τ1、τ2将两个优化子函数转换成本文的待优化单目标函数 为:
J=τ1f1+τ2f2 (6)
将式(3)、(4)代入,通过权重系数将两个优化子函数转换成待优化的单目标函数:

其中 则待优化求解的变量为a1,a2,vmax;vmax即 为UUV匀速段的速度。
则待优化求解的变量为a1,a2,vmax;vmax即 为UUV匀速段的速度。
根据上述目标函数,利用粒子群算法对其进行优化求解,将种群大小、各粒子的分布位 置和飞行速度作为系统输入,如下式更新粒子的速度和位置:


其中c1,c2为学习因子,ω为惯性因子,具体步骤如下:
(1)将设定的初始化种群大小,随机初始化各粒子的分布位置和飞行速度。
(2)根据以能耗为评价指标的目标函数J,计算所有粒子当前位置的能耗指标,并记录 在每个粒子的 中。比较每个粒子的能耗指标大小,将当前整个群体中的最优个体的 能耗指标最优值及该个体的位置存储在gbest中。
中。比较每个粒子的能耗指标大小,将当前整个群体中的最优个体的 能耗指标最优值及该个体的位置存储在gbest中。
(3)根据粒子更新公式,更新各粒子的位置及速度,并重新计算新产生粒子的能耗指标。
(4)比较各个粒子的能耗指标和前一个存储下来的pbest大小,若当前粒子的能耗指标 更小,则更新pbest为当前能耗指标。
(5)比较当前迭代过程获得的所有pbest和上一个迭代周期记录的gbest,若存在当前的 pbest比上一个迭代周期的gbest更优,更新gbest为该pbest。
(6)循环进行(3)和(4)两个步骤,直到满足终止条件。
上述粒子群优化过程,最终输出为拥有最小能耗指标的粒子,再由粒子群寻优得到的最 优能耗指标,得出UUV在距离目标定位点较远距离时,UUV速度及加速度的最优规划方案。 由上述关于加速度的最优规划方案,可推知UUV在各阶段受到的合外力大小,再结合已知 的环境信息及力的分解与合成原理,可求得相应阶段的UUV推力规划方案,保持执行该方 案对UUV位置和航向均进行控制,直至UUV进入Ⅱ级工作区域;
步骤5:判断UUV是否处于Ⅱ级工作区域:若r<R1,则判定UUV不处于Ⅱ级工作区域, 执行步骤6;否则,UUV采取Ⅱ级控制模式,按偏差指标,使用模型预测控制算法,实时滚动求解UUV位置和航向的最优控制量。
各UUV单体的一般运动形式为低速运动,机动性要求较弱,并且UUV的运动趋势可以 根据自身的当前状态、执行机构的输出以及由传感器所感知的环境信息进行适当估计,以控 制偏差作为输入,执行机构控制量作为输出,采用改进的广义预测控制考虑UUVⅡ级工作区 域动态控位的控制器设计。
在传统广义预测控制器设计过程中,性能指标函数通常选取为:

可以看出在该性能指标函数中只考虑了输出预测误差和控制增量两项,考虑到UUV动 态控位过程的能耗最小化,为避免输出量因控制系统输入的测量信息中的干扰等产生较大的 超调、引起较大的波动,从而增大了UUV输出量的变化波动幅度,本文将充分考虑输出量 对输入量的跟踪特性,将UUV的输出量变化量也作为性能指标函数的一项,预期能够抑制 输出量的超调及跟踪期望状态时产生的波动。为此,将上述性能指标函数改进得到:

其中,

R1、R2分别为柔性守位区和刚性守位区半径,R1<R2;C1、C2为根据经验设定的常数,C1<C2。其中,n为预测长度,s为控制长度,满足关系1<n,s≤n;λ(j)为控制加权系数, 令其为常数λ; 为抑制波动加权系数;y(k)为实际输出的控制量;y(k+j)为UUV的未 来输出控制量;Δu(k+j)=0,j=h,…,n,表示s个节拍后控制量不再产生变化;w(k)为期望 输出值,一般取:
为抑制波动加权系数;y(k)为实际输出的控制量;y(k+j)为UUV的未 来输出控制量;Δu(k+j)=0,j=h,…,n,表示s个节拍后控制量不再产生变化;w(k)为期望 输出值,一般取:
w(k+j)=αjy(k)+(1-αj)yd(j=1,2,…,n) (13)
其中,α为柔化系数,yd为系统给定的期望状态。令 其中Ta为系统的采样周期。令γ(j)为定值γ,则式(11)中的抑制波动项可写为:
其中Ta为系统的采样周期。令γ(j)为定值γ,则式(11)中的抑制波动项可写为:

该项为UUV的加速度项。利用粒子群优化算法,求解上述准则函数的最小值,得到优 选的控制序列:
ΔU=[Δu(k),Δu(k+1),…,Δu(k+s-1)]T (15)
即:
ΔU=argminJ (16)
由于每次对UUV实施上述控制时,只采用了控制序列ΔU中的第一个控制量Δu(k),故 可采用下式对UUV未来时刻的输出进行预测:

其中, Yp0分别表示在t=kT时刻,有Δu(k)及无Δu(k)作用下的未来p个时刻UUV 控制系统预测的控制输出,
Yp0分别表示在t=kT时刻,有Δu(k)及无Δu(k)作用下的未来p个时刻UUV 控制系统预测的控制输出, Yp0=[y0(k+1),y0(k+2),…,y0(k+p)]T,a=[a1,a2,…,ap]T为在各采样时刻,单位阶跃响应的 值。
Yp0=[y0(k+1),y0(k+2),…,y0(k+p)]T,a=[a1,a2,…,ap]T为在各采样时刻,单位阶跃响应的 值。
由于UUV协同观探测任务环境及UUV本身的模型不确定性,在k个时刻的控制输出作 用后,UUV在k+1时刻的实际控制输出y(k+1)与预测的系统输出 并不一定相等,因此就构成预测误差:
并不一定相等,因此就构成预测误差:

根据以上预测误差对其他未来时刻的预测值进行加权修正,得到:

其中, 是在t=(k+1)T时刻,经过预测误差校正后预测的t=(k+1)T时刻的控制输出量,
是在t=(k+1)T时刻,经过预测误差校正后预测的t=(k+1)T时刻的控制输出量,  h为预测误差校正矢量,h=[h1,h2,…,hp]T,h1=1。
h为预测误差校正矢量,h=[h1,h2,…,hp]T,h1=1。
将上述经反馈校正后的 作为UUV广义预测动态控位系统下一时刻的预测初值,由于 在预测t=(k+2)T,…,t=(k+p+1)T时刻的输出值时利用了t=(k+1)T时刻的控制预测初 值,因此令
作为UUV广义预测动态控位系统下一时刻的预测初值,由于 在预测t=(k+2)T,…,t=(k+p+1)T时刻的输出值时利用了t=(k+1)T时刻的控制预测初 值,因此令

可由上式对得出下一时刻的预测值,在进行过Δu(k)控制作用后,采集k+1时刻的控制 输出信息,并开始新一轮的预测、校正、优化,使得该UUV动态控位系统成为了一个闭环 的负反馈系统。由实时持续输出的UUV执行机构控制量,对UUV的位置、航行进行实时控制,直到UUV到达Ⅰ级工作区域内的目标定位点。
步骤6:若UUV收到任务结束指令,则UUV结束任务;否则,UUV采取Ⅰ级控制模式, 按偏差指标,使用模型预测控制算法,实时滚动求解UUV航向的最优控制量,对位置不进 行控制,并在每一拍求解出UUV航向的最优控制量后跳转至步骤3。
本发明的有益效果在于,
针对UUV在不同工作阶段的不同需求,分层设计了UUV的绿色动态控位控制方案,使 UUV在不同的状态下,都具有一套与之相适应的控制策略,能适时改变动态控位的控制曲线, 最终达到以较低的能耗及较低的推进器辐射噪声完成任务的目的,同时尽可能地保持UUV 集群的基本队形拓扑结构,使UUV集群完成协同观探测任务
实施例1:
本实施方式所述的是一种面向协同观探测任务的UUV集群绿色动态控位方法,所述方 法包括如下步骤:
步骤1:结合任务类型及具体需求,选定n(n≥1且n为整数)个同构UUV,构成UUV集群。
步骤2:以其中第i(1≤i≤n,且i为整数)个UUV的动态控位任务为例,根据具体任务要求,设定UUV在定深处航行;在合适的作业区域选定其目标定位点,记录该目标定位 点的经度、纬度以及航向信息。
步骤3:在水平面内,以UUV目标定位点为圆心,根据不同作业任务对UUV控位范围的需求,分别以R1,R2(R1<R2)为半径作圆,得到水平面内划分的不同工作区域,两个圆形区域即分别为Ⅰ级工作区域、Ⅱ级工作区域,水平面内除去以上两个区域的部分即为Ⅲ级工作区域,其中各工作区域半径的大小可视不同作业需求进行相应调整。
步骤4:开始动态控位任务,并实时在线更新UUV的运动状态信息,记录UUV当前经度、纬度、航向、速度以及各控制量信息。
步骤5:根据UUV的目标定位点与当前位置的经度及纬度信息,实时计算两点间距离, 记为r,并确定UUV所处的工作区域:
当r<R1时,UUV处于Ⅰ级工作区域;
当R1<r<R2时,UUV处于Ⅱ级工作区域;
当R2<r时,UUV处于Ⅲ级工作区域。
步骤6:根据步骤5的结果,判断UUV是否处于Ⅲ级工作区域:
如是,则采取Ⅲ级控制模式,以UUV运动耗能E、UUV任务总耗时T为优化目标,建 立多目标优化函数,将其作为最小能耗指标,并使用粒子群算法,得到能耗最优的推力规划方案,即对控制量进行全局离线最优规划,此模式下对UUV位置、航向均进行控制;一旦 求解出最优规划方案,则保持执行该方案直至UUV进入Ⅱ级工作区域;
否则,直接进入步骤7。
步骤7:判断UUV是否处于Ⅱ级工作区域:
如是,则采取Ⅱ级控制模式,按偏差指标,使用模型预测控制算法,考虑能耗的最小化, 将输出预测误差、控制增量及输出量变化量加入控制目标函数作为系统优化目标,实时滚动 求解UUV位置、航向的最优控制量,直至UUV到达Ⅰ级工作区域内的目标定位点后;
否则,直接进入步骤8。
步骤8:判断UUV是否处于Ⅰ级工作区域:
如是,则直接进入步骤9;
否则,记录异常并发出警报,然后跳到步骤9。
步骤9:判断UUV是否接收到任务结束指令:
如是,则结束任务;
否则,采取Ⅰ级控制模式,按偏差指标,使用模型预测控制算法,考虑能耗的最小化, 将输出预测误差、控制增量及输出量变化量加入控制目标函数作为系统优化目标,实时滚动 求解UUV航向的最优控制量,对位置不进行控制,并在每一拍求解出控制量后跳转至步骤5, 重复上述步骤5-8,直至收到任务结束指令,结束任务。
综上,本发明是一种面向协同观探测任务的UUV集群绿色动态控位方法,目的是为了 解决UUV集群在动态控位过程中由于能耗较大而无法实现长时间待机值守并保持阵型的问 题。所述方法以计算机程序的方式分别嵌入到UUV集群各群员的任务计算机中,包括如下 步骤:当确定UUV处于Ⅲ级工作区域时,采取Ⅲ级控制模式,即按最小能耗指标对控制量 进行全局离线最优规划,对UUV位置、航向均进行控制,直至UUV进入Ⅱ级工作区域;当确定UUV处于Ⅱ级工作区域时,采取Ⅱ级控制模式,即按偏差指标对控制量进行实时在线优化,对UUV位置、航向均进行控制,直至UUV到达Ⅰ级工作区域内的目标定位点;当确 定UUV处于Ⅰ级工作区域时,采取I级控制模式,即按偏差指标对控制量进行实时在线优化, 只对UUV航向进行控制,不对UUV位置进行控制,直至UUV在风、浪、流的作用下进入 Ⅱ级工作区域或收到指控系统下发的任务结束指令。本发明用于使UUV集群在完成动态控 位任务的过程中保持预期阵型,并达到降低能耗的效果。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员 来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等 同替换、改进等,均应包含在本发明的保护范围之内。
Claims (3)
1.一种UUV集群中UUV个体的绿色动态控位方法,其特征在于,包括以下步骤:
步骤1:根据作业任务要求,设定UUV在定深处航行时在作业区域的目标定位点,记录该目标定位点的经度、纬度以及航向信息;
步骤2:在水平面内,以UUV目标定位点为圆心,分别以R1和R2为半径作圆,将作业区域划分为Ⅰ级工作区域、Ⅱ级工作区域和Ⅲ级工作区域;半径R1和R2根据作业任务要求设定,且R1<R2;所述的Ⅰ级工作区域为以UUV目标定位点为圆心,以R1为半径的圆形区域;所述的Ⅱ级工作区域为以UUV目标定位点为圆心,以R1和R2为半径的两个圆形之间的圆环区域;作业区域内除Ⅰ级工作区域和Ⅱ级工作区域以外的部分均为Ⅲ级工作区域;
步骤3:开始动态控位任务,实时在线更新UUV的运动状态信息,记录UUV当前经度、纬度、航向、速度以及各控制量信息;根据UUV当前位置与目标定位点的经纬度信息,实时计算两点间距离r;
步骤4:判断UUV是否处于Ⅲ级工作区域:若r≤R2,则判定UUV不处于Ⅲ级工作区域,执行步骤5;否则,UUV采取Ⅲ级控制模式,以最小能耗指标,使用粒子群算法计算UUV位置和航向的全局最优规划方案;
步骤5:判断UUV是否处于Ⅱ级工作区域:若r<R1,则判定UUV不处于Ⅱ级工作区域,执行步骤6;否则,UUV采取Ⅱ级控制模式,按偏差指标,使用模型预测控制算法,实时滚动求解UUV位置和航向的最优控制量;
步骤6:若UUV收到任务结束指令,则UUV结束任务;否则,UUV采取Ⅰ级控制模式,按偏差指标,使用模型预测控制算法,实时滚动求解UUV航向的最优控制量,对位置不进行控制,并在每一拍求解出UUV航向的最优控制量后跳转至步骤3。
2.根据权利要求1所述的一种UUV集群中UUV个体的绿色动态控位方法,其特征在于:所述的步骤4中UUV采取Ⅲ级控制模式,以最小能耗指标,使用粒子群算法计算UUV位置和航向的全局最优规划方案的方法具体为:
设定UUV的运动包含匀加速-匀速-匀减速三段,UUV到达目标定位点时的速度为0;待优化的单目标函数为:
其中,τ1和τ2为权重系数;ρ为海水密度; 为海流对UUV纵向上产生的干扰力;
为海流对UUV纵向上产生的干扰力; 为海流对UUV横向上产生的干扰力;αc为海流相对UUV的流向角;CX(αc)为流向角αc对应的纵向海流阻力系数;CY(αc)为流向角αc对应的横向海流阻力系数;ATS为UUV纵向迎流面积;ALS为UUV横向迎流面积;Vc为海流速度;sx为UUV在海流作用下沿x轴的航行距离;sy为UUV在海流作用下沿y轴的航行距离;l为UUV初始位置距目标定位点的距离;
为海流对UUV横向上产生的干扰力;αc为海流相对UUV的流向角;CX(αc)为流向角αc对应的纵向海流阻力系数;CY(αc)为流向角αc对应的横向海流阻力系数;ATS为UUV纵向迎流面积;ALS为UUV横向迎流面积;Vc为海流速度;sx为UUV在海流作用下沿x轴的航行距离;sy为UUV在海流作用下沿y轴的航行距离;l为UUV初始位置距目标定位点的距离; 待优化求解的变量为a1、a2、vmax;vmax为UUV匀速段的速度;
待优化求解的变量为a1、a2、vmax;vmax为UUV匀速段的速度;
根据上述目标函数,利用粒子群算法对其进行优化求解,将种群大小、各粒子的分布位置和飞行速度作为系统输入;粒子的速度和位置的更新公式为:

其中,c1,c2为学习因子;ω为惯性因子;具体步骤如下:
步骤4.1:将设定的初始化种群大小,随机初始化各粒子的分布位置和飞行速度;
步骤4.2:根据以能耗为评价指标的目标函数J,计算所有粒子当前位置的能耗指标,并记录在每个粒子的 中;比较每个粒子的能耗指标大小,将当前整个群体中的最优个体的能耗指标最优值及该个体的位置存储在gbest中;
中;比较每个粒子的能耗指标大小,将当前整个群体中的最优个体的能耗指标最优值及该个体的位置存储在gbest中;
步骤4.3:根据粒子更新公式,更新各粒子的位置及速度,并重新计算新产生粒子的能耗指标;
步骤4.4:比较各个粒子的能耗指标和前一个存储下来的pbest大小,若当前粒子的能耗指标更小,则更新pbest为当前能耗指标;
步骤4.5:比较当前迭代过程获得的所有pbest和上一个迭代周期记录的gbest,若存在当前的pbest比上一个迭代周期的gbest更优,更新gbest为该pbest;
步骤4.6:循环进行步骤4.3和步骤4.4,直到满足终止条件;
上述粒子群优化过程,最终输出为拥有最小能耗指标的粒子,再由粒子群寻优得到的最优能耗指标,得出UUV在距离目标定位点较远距离时,UUV速度及加速度的最优规划方案;由上述关于加速度的最优规划方案,可推知UUV在各阶段受到的合外力大小,再结合已知的环境信息及力的分解与合成原理,可求得相应阶段的UUV推力规划方案,保持执行该方案对UUV位置和航向均进行控制,直至UUV进入Ⅱ级工作区域。
3.根据权利要求1或2所述的一种UUV集群中UUV个体的绿色动态控位方法,其特征在于:所述的步骤5中UUV采取Ⅱ级控制模式,按偏差指标,使用模型预测控制算法,实时滚动求解UUV位置和航向的最优控制量的方法具体为:
各UUV单体的一般运动形式为低速运动,机动性要求较弱,并且UUV的运动趋势可以根据自身的当前状态、执行机构的输出以及由传感器所感知的环境信息进行适当估计,以控制偏差作为输入,执行机构控制量作为输出;采用改进的广义预测控制考虑UUVⅡ级工作区域动态控位的控制器设计;性能指标函数为:


其中,R1、R2分别为柔性守位区和刚性守位区半径,R1<R2;C1、C2为根据经验设定的常数,C1<C2;n为预测长度,s为控制长度,1<n,s≤n;λ为控制加权系数;y(k)为实际输出的控制量;y(k+j)为UUV的未来输出控制量;Δu(k+j)=0,j=h,…,n,表示s个节拍后控制量不再产生变化;yd为系统给定的期望状态;Ta为系统的采样周期;
利用粒子群优化算法,求解上述性能指标函数的最小值,得到优选的控制序列:
ΔU=[Δu(k),Δu(k+1),…,Δu(k+s-1)]T
由于每次对UUV实施上述控制时,只采用了控制序列ΔU中的第一个控制量Δu(k),故可采用下式对UUV未来时刻的输出进行预测:

其中, 表示在t=kT时刻,有Δu(k)作用下的未来p个时刻UUV控制系统预测的控制输出,
表示在t=kT时刻,有Δu(k)作用下的未来p个时刻UUV控制系统预测的控制输出, Yp0表示在t=kT时刻,无Δu(k)作用下的未来p个时刻UUV控制系统预测的控制输出,Yp0=[y0(k+1),y0(k+2),…,y0(k+p)]T;a=[a1,a2,…,ap]T为在各采样时刻,单位阶跃响应的值;
Yp0表示在t=kT时刻,无Δu(k)作用下的未来p个时刻UUV控制系统预测的控制输出,Yp0=[y0(k+1),y0(k+2),…,y0(k+p)]T;a=[a1,a2,…,ap]T为在各采样时刻,单位阶跃响应的值;
由于UUV协同观探测任务环境及UUV本身的模型不确定性,在k个时刻的控制输出作用后,UUV在k+1时刻的实际控制输出y(k+1)与预测的系统输出 并不一定相等,因此就构成预测误差:
并不一定相等,因此就构成预测误差:

根据以上预测误差对其他未来时刻的预测值进行加权修正,得到:
其中, 是在t=(k+1)T时刻,经过预测误差校正后预测的t=(k+1)T时刻的控制输出量,
是在t=(k+1)T时刻,经过预测误差校正后预测的t=(k+1)T时刻的控制输出量, h为预测误差校正矢量,h=[h1,h2,…,hp]T,h1=1;
h为预测误差校正矢量,h=[h1,h2,…,hp]T,h1=1;
将经反馈校正后的 作为UUV广义预测动态控位系统下一时刻的预测初值,则由于在预测t=(k+2)T,…,t=(k+p+1)T时刻的输出值时利用了t=(k+1)T时刻的控制预测初值,因此令
作为UUV广义预测动态控位系统下一时刻的预测初值,则由于在预测t=(k+2)T,…,t=(k+p+1)T时刻的输出值时利用了t=(k+1)T时刻的控制预测初值,因此令

可由上式对得出下一时刻的预测值,在进行过Δu(k)控制作用后,采集k+1时刻的控制输出信息,并开始新一轮的预测、校正、优化,使得该UUV动态控位系统成为了一个闭环的负反馈系统;由实时持续输出的UUV执行机构控制量,对UUV的位置、航行进行实时控制,直到UUV到达Ⅰ级工作区域内的目标定位点。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011015811.0A CN112068577A (zh) | 2020-09-24 | 2020-09-24 | 一种uuv集群中uuv个体的绿色动态控位方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011015811.0A CN112068577A (zh) | 2020-09-24 | 2020-09-24 | 一种uuv集群中uuv个体的绿色动态控位方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112068577A true CN112068577A (zh) | 2020-12-11 |
Family
ID=73684050
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011015811.0A Pending CN112068577A (zh) | 2020-09-24 | 2020-09-24 | 一种uuv集群中uuv个体的绿色动态控位方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112068577A (zh) |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103970021A (zh) * | 2014-05-21 | 2014-08-06 | 哈尔滨工程大学 | 一种基于模型预测控制的松弛动力定位控制系统 |
| US20160253906A1 (en) * | 2014-04-08 | 2016-09-01 | University Of New Hampshire | Optical Based Pose Detection For Multiple Unmanned Underwater Vehicles |
| CN106628048A (zh) * | 2016-10-20 | 2017-05-10 | 哈尔滨工程大学 | 一种全海深智能水下机器人的激光示踪器 |
| WO2017202633A1 (en) * | 2016-05-26 | 2017-11-30 | Tidal Generation Limited | Water current power generation systems |
| CN107797456A (zh) * | 2017-11-09 | 2018-03-13 | 江苏方天电力技术有限公司 | 基于渐消记忆在线极限学习机的电厂除尘器优化控制方法 |
| CN107995719A (zh) * | 2017-10-24 | 2018-05-04 | 北京臻迪科技股份有限公司 | 浮游移动体及发光控制方法 |
| CN108445762A (zh) * | 2018-03-21 | 2018-08-24 | 青岛科技大学 | 基于ukf滤波和约束模型预测控制的动力定位控制方法 |
| CN108549234A (zh) * | 2018-05-11 | 2018-09-18 | 江南大学 | 一种基于动态变值的多目标优化控制方法 |
| CN108594846A (zh) * | 2018-03-23 | 2018-09-28 | 哈尔滨工程大学 | 一种障碍环境下多auv编队队形优化控制方法 |
| CN109782779A (zh) * | 2019-03-19 | 2019-05-21 | 电子科技大学 | 基于种群超启发式算法的洋流环境下auv路径规划方法 |
| CN110580057A (zh) * | 2019-09-26 | 2019-12-17 | 哈尔滨工程大学 | 一种基于圆周分层规划的uuv集群编队队形形成方法 |
| CN111045453A (zh) * | 2019-12-25 | 2020-04-21 | 南京工程学院 | 一种基于无人艇与多水下机器人的协同控制系统及方法 |
-
2020
- 2020-09-24 CN CN202011015811.0A patent/CN112068577A/zh active Pending
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160253906A1 (en) * | 2014-04-08 | 2016-09-01 | University Of New Hampshire | Optical Based Pose Detection For Multiple Unmanned Underwater Vehicles |
| CN103970021A (zh) * | 2014-05-21 | 2014-08-06 | 哈尔滨工程大学 | 一种基于模型预测控制的松弛动力定位控制系统 |
| WO2017202633A1 (en) * | 2016-05-26 | 2017-11-30 | Tidal Generation Limited | Water current power generation systems |
| CN106628048A (zh) * | 2016-10-20 | 2017-05-10 | 哈尔滨工程大学 | 一种全海深智能水下机器人的激光示踪器 |
| CN107995719A (zh) * | 2017-10-24 | 2018-05-04 | 北京臻迪科技股份有限公司 | 浮游移动体及发光控制方法 |
| CN107797456A (zh) * | 2017-11-09 | 2018-03-13 | 江苏方天电力技术有限公司 | 基于渐消记忆在线极限学习机的电厂除尘器优化控制方法 |
| CN108445762A (zh) * | 2018-03-21 | 2018-08-24 | 青岛科技大学 | 基于ukf滤波和约束模型预测控制的动力定位控制方法 |
| CN108594846A (zh) * | 2018-03-23 | 2018-09-28 | 哈尔滨工程大学 | 一种障碍环境下多auv编队队形优化控制方法 |
| CN108549234A (zh) * | 2018-05-11 | 2018-09-18 | 江南大学 | 一种基于动态变值的多目标优化控制方法 |
| CN109782779A (zh) * | 2019-03-19 | 2019-05-21 | 电子科技大学 | 基于种群超启发式算法的洋流环境下auv路径规划方法 |
| CN110580057A (zh) * | 2019-09-26 | 2019-12-17 | 哈尔滨工程大学 | 一种基于圆周分层规划的uuv集群编队队形形成方法 |
| CN111045453A (zh) * | 2019-12-25 | 2020-04-21 | 南京工程学院 | 一种基于无人艇与多水下机器人的协同控制系统及方法 |
Non-Patent Citations (4)
| Title |
|---|
| 刘乐: "基于PSO优化模糊控制的船舶能量管理策略研究", 《武汉理工大学学报》 * |
| 徐健: "面向阵型保持的UUV集群绿色动态控位方法研究", 《仪器仪表学报》 * |
| 徐国焯: "多UUV编队路径跟踪控制研究", 《中国优秀硕士学位论文 信息科技辑》 * |
| 王磊: "基于PSO算法的多UUV导航方法", 《水下无人系统学报》 * |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111966118B (zh) | 一种rov推力分配与基于强化学习的运动控制方法 | |
| CN110308735B (zh) | 一种针对输入时滞的欠驱动uuv轨迹跟踪滑模控制方法 | |
| CN108803321B (zh) | 基于深度强化学习的自主水下航行器轨迹跟踪控制方法 | |
| CN108803313B (zh) | 一种基于海流预测模型的路径规划方法 | |
| CN114967714B (zh) | 一种自主式水下机器人抗扰运动控制方法及系统 | |
| Liu et al. | A hierarchical disturbance rejection depth tracking control of underactuated AUV with experimental verification | |
| Li et al. | Soft-switching proximate time optimal heading control for underactuated autonomous underwater vehicle | |
| Hu et al. | Trajectory tracking and re-planning with model predictive control of autonomous underwater vehicles | |
| CN116257067A (zh) | 无人艇集群的协同编队多层次规划控制方法 | |
| CN117311142A (zh) | 一种融合粒子群算法与神经网络预测控制的dp船舶运动控制与推力分配协同控制方法 | |
| CN115657689B (zh) | 一种基于轨迹预测的自主水下航行器目标跟踪控制方法 | |
| CN109828462A (zh) | 波浪滑翔器变航速下自适应艏向控制器及控制方法 | |
| CN115951581A (zh) | 一种基于改进empc的高速无人艇路径跟踪控制方法 | |
| CN111427356A (zh) | 一种船舶航向区间控制方法和系统 | |
| CN112068577A (zh) | 一种uuv集群中uuv个体的绿色动态控位方法 | |
| CN114035567B (zh) | 一种水面无人艇航控系统 | |
| CN112506052B (zh) | 一种水下考古机器人抗云台转动干扰控制方法 | |
| CN115755891A (zh) | 一种高海况下近水面航行器运动控制方法 | |
| CN116610122A (zh) | 一种稳定航速的无人艇路径跟踪方法及无人艇 | |
| CN116520834A (zh) | 一种低能耗的无人船巡航方法 | |
| Feng et al. | An adaptive position keeping algorithm for autonomous sailboats | |
| Nunez | Optimal control of the ac75 sailboat for the america’s cup race | |
| Rodriguez et al. | Adaptive Learning and Optimization of High-Speed Sailing Maneuvers for America's Cup | |
| Chen et al. | Research on Target Tracking System of Unmanned Surface Vehicle Based on Hierarchical Control Strategy | |
| CN113050666B (zh) | 水下自主航行器深度和纵向解耦控制方法及系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20201211 |
|
| RJ01 | Rejection of invention patent application after publication |