CN112068577A - Green dynamic position control method for UUV individuals in UUV cluster - Google Patents
Green dynamic position control method for UUV individuals in UUV cluster Download PDFInfo
- Publication number
- CN112068577A CN112068577A CN202011015811.0A CN202011015811A CN112068577A CN 112068577 A CN112068577 A CN 112068577A CN 202011015811 A CN202011015811 A CN 202011015811A CN 112068577 A CN112068577 A CN 112068577A
- Authority
- CN
- China
- Prior art keywords
- uuv
- control
- energy consumption
- level
- working area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 44
- 238000005265 energy consumption Methods 0.000 claims abstract description 58
- 230000008569 process Effects 0.000 claims abstract description 16
- 230000015572 biosynthetic process Effects 0.000 claims abstract description 6
- 238000013461 design Methods 0.000 claims abstract description 5
- 239000002245 particle Substances 0.000 claims description 56
- 238000005457 optimization Methods 0.000 claims description 32
- 230000006870 function Effects 0.000 claims description 24
- 230000009471 action Effects 0.000 claims description 13
- 238000012937 correction Methods 0.000 claims description 13
- 230000001133 acceleration Effects 0.000 claims description 12
- 238000005096 rolling process Methods 0.000 claims description 10
- 230000007613 environmental effect Effects 0.000 claims description 7
- 230000007246 mechanism Effects 0.000 claims description 6
- 239000000178 monomer Substances 0.000 claims description 6
- 238000005070 sampling Methods 0.000 claims description 6
- 238000000354 decomposition reaction Methods 0.000 claims description 3
- 238000011156 evaluation Methods 0.000 claims description 3
- 230000004044 response Effects 0.000 claims description 3
- 238000003786 synthesis reaction Methods 0.000 claims description 3
- 230000005855 radiation Effects 0.000 abstract description 5
- 238000011217 control strategy Methods 0.000 abstract description 4
- 238000001514 detection method Methods 0.000 description 7
- 230000009286 beneficial effect Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 238000011160 research Methods 0.000 description 2
- 239000013535 sea water Substances 0.000 description 2
- 230000008859 change Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000012938 design process Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000009191 jumping Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
Images

Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/04—Control of altitude or depth
- G05D1/06—Rate of change of altitude or depth
- G05D1/0692—Rate of change of altitude or depth specially adapted for under-water vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Feedback Control In General (AREA)
Abstract
The invention belongs to the technical field of UUV cluster dynamic position control, and particularly relates to a green dynamic position control method for UUV individuals in a UUV cluster. The invention designs a green dynamic position control scheme of the UUV in a layered manner aiming at different requirements of the UUV in different working stages, so that the UUV has a set of control strategies adapted to the UUV in different states, a control curve of the dynamic position control can be changed in time, the aim of completing tasks with lower energy consumption and lower radiation noise of a propeller is finally achieved, and a basic formation topological structure of a UUV cluster is kept as far as possible. The invention solves the problem that the UUV cluster can not realize long-time standby watch and keep the array type due to larger energy consumption in the dynamic position control process, and realizes that the UUV finishes the dynamic position control with the least possible power consumption, the lowest possible UUV propeller motor car frequency, the lowest possible radiation noise and the longest possible operation time.
Description
Technical Field
The invention belongs to the technical field of UUV cluster dynamic position control, and particularly relates to a green dynamic position control method for UUV individuals in a UUV cluster.
Background
The dynamic position control of the UUV means that the UUV resists external interference by means of a propelling force (moment) generated by a propeller of the UUV so as to keep a pose, and when the UUV cluster executes cooperative observation and detection tasks such as underwater region watching and the like, the dynamic position control state needs to be kept for a long time. During dynamic position control, the UUV propeller frequently drives the vehicle to be a main part of electric quantity consumption. Therefore, a Green-DP (Green-DP) method for dynamically controlling the positions of the UUV clusters is designed, so that the energy consumption of the UUV clusters can be reduced, the concealment during operation is improved, the standby watching time and the operation time are increased, and the method is very necessary for dynamically controlling the positions of the UUV clusters.
The existing technical literature retrieval finds that research on green dynamic position control at home and abroad is mostly concentrated on single ships at present, and a green control strategy is mainly embodied in an environment compensator, a prediction controller, an optimal heading and thrust distribution optimization, and aiming at the thrust distribution problem of positioning operation of a ship in a special marine environment with small environmental force and frequently changing direction, a combined bias strategy is adopted in an article dynamic position control ship thrust optimization distribution research published by Liukai and the like in Ship electric technology (09 years 2018) of Wuhan ship, and an energy consumption optimal secondary thrust distribution method is provided according to the problem of overlarge energy consumption after combined bias; the Green-DP system of Norwegian Kongsberg successfully reduces the working frequency of a propeller by dividing a working area and adopting methods of an environment compensator and a model predictive controller, and achieves the effect of reducing energy consumption, but the methods are all suitable for single ships rather than UUV clusters, namely the problem of maintaining the array of the clusters is not considered, and when the UUV clusters lack wind, waves and flow sensors, the methods cannot effectively complete dynamic position control tasks, and the control schemes cannot be designed hierarchically according to different requirements of the UUV in different working stages.
Disclosure of Invention
The invention aims to solve the problem that long-time standby watch on and array maintenance cannot be realized due to high energy consumption in the dynamic position control process of a UUV cluster, and provides a green dynamic position control method for UUV individuals in the UUV cluster.
The purpose of the invention is realized by the following technical scheme: the method comprises the following steps:
step 1: according to the requirement of an operation task, a target positioning point of the UUV in an operation area during navigation at a fixed depth is set, and longitude, latitude and course information of the target positioning point are recorded;
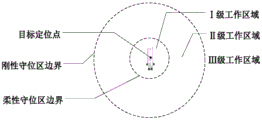
step 2: in a horizontal plane, a UUV target positioning point is taken as a circle center, and R is respectively taken as1And R2Making a circle for the radius, and dividing the operation area into a first-level operation area, a second-level operation area and a third-level operation area; radius R1And R2Is set according to job task requirements, and R1<R2(ii) a The I-level working area takes a UUV target positioning point as the center of a circle and R as the center of a circle1A circular area of radius; the II-level working area takes the UUV target positioning point as the circle center and R as the circle center1And R2Is the annular region between two circles of radius; all parts except the I-level working area and the II-level working area in the working area are III-level working areas;
and step 3: starting a dynamic position control task, updating the motion state information of the UUV on line in real time, and recording the current longitude, latitude, course, speed and information of each control quantity of the UUV; calculating the distance r between two points in real time according to the current position of the UUV and the longitude and latitude information of the target positioning point;
and 4, step 4: judging whether the UUV is in a III-level working area: if R is less than or equal to R2If yes, judging that the UUV is not in the III-level working area, and executing the step 5; otherwise, the UUV adopts a III-level control mode, and a particle swarm algorithm is used for calculating a global optimal planning scheme of the position and the course of the UUV according to the minimum energy consumption index;
and 5: judging whether the UUV is in a II-level working area: if R is less than R1If yes, judging that the UUV is not in the II-level working area, and executing the step 6; otherwise, the UUV adopts a II-level control mode, and according to the deviation index, a model predictive control algorithm is used for real-time rolling and solving the optimal control quantity of the position and the course of the UUV;
step 6: if the UUV receives the task ending instruction, the UUV ends the task; otherwise, the UUV adopts a I-level control mode, the optimal control quantity of the UUV course is solved in a real-time rolling mode by using a model predictive control algorithm according to the deviation index, the position is not controlled, and the step 3 is skipped after the optimal control quantity of the UUV course is solved in each beat.
The present invention may further comprise:
in the step 4, the method for calculating the global optimal planning scheme of the position and the heading of the UUV by the UUV in the III-level control mode and the particle swarm algorithm by using the minimum energy consumption index specifically comprises the following steps:
setting the motion of the UUV to comprise three sections of uniform acceleration, uniform speed and uniform deceleration, wherein the speed of the UUV when the UUV reaches a target positioning point is 0; the single objective function to be optimized is:

wherein, tau1And τ2Is a weight coefficient; rho is the density of the seawater; interference force generated by ocean current on the UUV in the longitudinal direction;
interference force generated by ocean current on the UUV in the longitudinal direction; interference force generated by ocean currents on the UUV in the transverse direction; alpha is alphacThe flow direction angle of the ocean current relative to the UUV; cX(αc) Is the flow direction angle alphacCorresponding longitudinal ocean current drag coefficient; cY(αc) Is the flow direction angle alphacCorresponding transverse ocean current resistance coefficient; a. theTSThe longitudinal incident flow area of the UUV is defined; a. theLSThe area of the UUV in the transverse direction is UUV; vcIs the current velocity; sxThe sailing distance of the UUV along the x axis under the action of ocean current; syThe sailing distance of the UUV along the y axis under the action of ocean current; l is the distance between the initial position of the UUV and the target positioning point;
interference force generated by ocean currents on the UUV in the transverse direction; alpha is alphacThe flow direction angle of the ocean current relative to the UUV; cX(αc) Is the flow direction angle alphacCorresponding longitudinal ocean current drag coefficient; cY(αc) Is the flow direction angle alphacCorresponding transverse ocean current resistance coefficient; a. theTSThe longitudinal incident flow area of the UUV is defined; a. theLSThe area of the UUV in the transverse direction is UUV; vcIs the current velocity; sxThe sailing distance of the UUV along the x axis under the action of ocean current; syThe sailing distance of the UUV along the y axis under the action of ocean current; l is the distance between the initial position of the UUV and the target positioning point;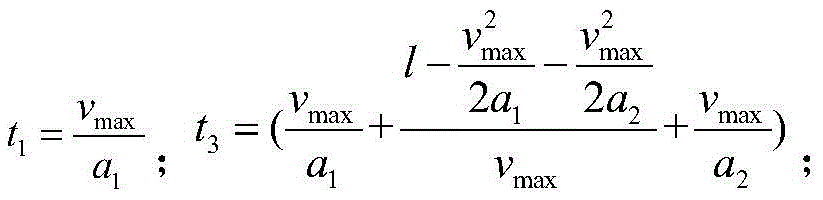 the variable to be solved optimally is a1、a2、vmax; vmaxThe speed of the UUV constant speed section is obtained;
the variable to be solved optimally is a1、a2、vmax; vmaxThe speed of the UUV constant speed section is obtained;
according to the objective function, the particle swarm optimization is used for carrying out optimization solution, and the population size, the distribution position and the flight speed of each particle are used as system input; the updated formula for the velocity and position of the particle is:


wherein, c1,c2Is a learning factor; omega is an inertia factor; the method comprises the following specific steps:
step 4.1: randomly initializing the distribution position and the flying speed of each particle according to the set initialization population size;
step 4.2: according to an objective function J taking energy consumption as an evaluation index, calculating the energy consumption index of the current positions of all the particles, and recording the energy consumption index of each particle Performing the following steps; comparing the size of the energy consumption index of each particle, and storing the energy consumption index optimal value of the optimal individual in the current whole population and the position of the individual in the gbest;
Performing the following steps; comparing the size of the energy consumption index of each particle, and storing the energy consumption index optimal value of the optimal individual in the current whole population and the position of the individual in the gbest;
step 4.3: updating the position and the speed of each particle according to a particle updating formula, and recalculating the energy consumption index of the newly generated particle;
step 4.4: comparing the energy consumption index of each particle with the previously stored pbest size, and if the energy consumption index of the current particle is smaller, updating the pbest as the current energy consumption index;
step 4.5: comparing all pbest obtained in the current iteration process with the gbest recorded in the previous iteration period, and if the current pbest is better than the gbest in the previous iteration period, updating the gbest to be the pbest;
step 4.6: step 4.3 and step 4.4 are circularly carried out until the termination condition is met;
in the particle swarm optimization process, the particles with the minimum energy consumption index are finally output, and the optimal energy consumption index obtained by particle swarm optimization is used for obtaining the optimal planning scheme of the velocity and acceleration of the UUV when the UUV is far away from the target positioning point; according to the optimal planning scheme about the acceleration, the magnitude of the resultant external force on the UUV in each stage can be deduced, then the UUV thrust planning scheme in the corresponding stage can be obtained by combining the known environmental information and the force decomposition and synthesis principle, and the UUV thrust planning scheme is kept to be executed to control the position and the course of the UUV until the UUV enters a II-level working area.
In the step 5, the method for solving the optimal control quantity of the position and the course of the UUV in a real-time rolling manner by adopting a II-level control mode and using a model predictive control algorithm according to the deviation index specifically comprises the following steps:
the general motion form of each UUV monomer is low-speed motion, the mobility requirement is weak, the motion trend of the UUV can be properly estimated according to the current state of the UUV monomer, the output of an actuating mechanism and environmental information sensed by a sensor, the control deviation is used as input, and the control quantity of the actuating mechanism is used as output; adopting improved generalized predictive control to consider the controller design of UUV II-level working area dynamic position control; the performance index function is:

wherein R is1、R2Respectively, a flexible detention zone and a rigid detention zone radius, R1<R2;C1、C2A constant set empirically, C1<C2(ii) a n is the predicted length, s is the control length, 1<n, s is less than or equal to n; λ is a control weighting coefficient; y (k) is a control amount actually output; y (k + j) is the future output control quantity of the UUV; Δ u (k + j) is 0, j is h, …, n, which indicates that the control amount is not changed any more after s beats; y isdA desired state given to the system; t isaIs the sampling period of the systemA period;
solving the minimum value of the performance index function by utilizing a particle swarm optimization algorithm to obtain an optimal control sequence:
ΔU=[Δu(k),Δu(k+1),…,Δu(k+s-1)]T
since only the first control quantity Δ U (k) in the control sequence Δ U is used each time the UUV is controlled as described above, the output of the UUV at a future time can be predicted using the following equation:

wherein, represents the predicted control output of the UUV control system at p future moments under the action of delta u (k) at the moment t-kT,
represents the predicted control output of the UUV control system at p future moments under the action of delta u (k) at the moment t-kT, Yp0denotes the predicted control output of the UUV control system at p future times without Δ u (k) at time t-kT, Yp0=[y0(k+1),y0(k+2),…,y0(k+p)]T; a=[a1,a2,…,ap]TIs the value of the unit step response at each sampling instant;
Yp0denotes the predicted control output of the UUV control system at p future times without Δ u (k) at time t-kT, Yp0=[y0(k+1),y0(k+2),…,y0(k+p)]T; a=[a1,a2,…,ap]TIs the value of the unit step response at each sampling instant;
due to the uncertainty of the UUV collaborative observation task environment and the model of the UUV, after the control output at k moments acts, the actual control output y (k +1) of the UUV at k +1 moment and the predicted system output Not necessarily equal, and therefore constitutes a prediction error:
Not necessarily equal, and therefore constitutes a prediction error:

and according to the prediction error, performing weighted correction on the predicted values of other future moments to obtain:

wherein, the control output quantity at the time T (k +1) T predicted after the prediction error correction,
the control output quantity at the time T (k +1) T predicted after the prediction error correction, h is the prediction error correction vector, h ═ h1,h2,…,hp]T,h1=1;
h is the prediction error correction vector, h ═ h1,h2,…,hp]T,h1=1;

Will be feedback corrected As the initial prediction value at the next time of the UUV generalized predictive dynamic positioning system, the initial control prediction value at time T ═ T + 1T is used when predicting the output value at time T ═ T + 2T, …, and T ═ T + p + 1T, so that the order is such that
As the initial prediction value at the next time of the UUV generalized predictive dynamic positioning system, the initial control prediction value at time T ═ T + 1T is used when predicting the output value at time T ═ T + 2T, …, and T ═ T + p + 1T, so that the order is such that

The predicted value of the next moment can be obtained by the above formula pair, after the control action of delta u (k), the control output information of the moment of k +1 is collected, and a new round of prediction, correction and optimization is started, so that the UUV dynamic position control system becomes a closed-loop negative feedback system; and the UUV actuator control quantity continuously output in real time controls the position and navigation of the UUV in real time until the UUV reaches a target positioning point in the I-level working area.
The invention has the beneficial effects that:
the invention designs a green dynamic position control scheme of the UUV in a layered manner aiming at different requirements of the UUV in different working stages, so that the UUV has a set of control strategies adapted to the UUV in different states, a control curve of the dynamic position control can be changed in time, the aim of completing tasks with lower energy consumption and lower radiation noise of a propeller is finally achieved, and meanwhile, a basic formation topological structure of a UUV cluster is kept as far as possible, so that the UUV cluster completes a collaborative observation detection task.
Drawings
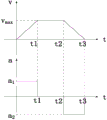
Fig. 1 is a schematic diagram of a UUV acceleration planning scheme based on particle swarm optimization in the present invention.
Fig. 2 is a schematic diagram of division of a single UUV working area in a UUV cluster in the present invention.
Fig. 3 is an overall flow chart of the present invention.
Detailed Description
The invention is further described below with reference to the accompanying drawings.
The invention relates to a green dynamic position control method of UUV individuals in a UUV cluster, which is oriented to a collaborative observation and detection task. The invention aims to solve the problem that a UUV cluster cannot realize long-time standby watching and maintain an array type due to high energy consumption in a dynamic position control process, and provides a green dynamic position control method of the UUV cluster, which is suitable for each member in a type UUV isomorphic cluster and faces a collaborative observation and detection task. The UUV can complete the dynamic position control of the UUV with the lowest possible power consumption, the lowest possible UUV propeller motor vehicle frequency, the lowest possible radiation noise and the longest possible operation time.
A green dynamic position control method for UUV individuals in a UUV cluster comprises the following steps:
step 1: according to the requirement of an operation task, a target positioning point of the UUV in an operation area during navigation at a fixed depth is set, and longitude, latitude and course information of the target positioning point are recorded;
step 2: in a horizontal plane, a UUV target positioning point is taken as a circle center, and R is respectively taken as1And R2Making a circle for the radius, and dividing the operation area into a first-level operation area, a second-level operation area and a third-level operation area; radius R1And R2Is set according to job task requirements, and R1<R2(ii) a The I-level working area takes a UUV target positioning point as the center of a circle and R as the center of a circle1Is of radiusA circular region; the II-level working area takes the UUV target positioning point as the circle center and R as the circle center1And R2Is the annular region between two circles of radius; all parts except the I-level working area and the II-level working area in the working area are III-level working areas;
and step 3: starting a dynamic position control task, updating the motion state information of the UUV on line in real time, and recording the current longitude, latitude, course, speed and information of each control quantity of the UUV; calculating the distance r between two points in real time according to the current position of the UUV and the longitude and latitude information of the target positioning point;
and 4, step 4: judging whether the UUV is in a III-level working area: if R is less than or equal to R2If yes, judging that the UUV is not in the III-level working area, and executing the step 5; otherwise, the UUV adopts a III-level control mode, and a particle swarm algorithm is used for calculating a global optimal planning scheme of the position and the course of the UUV according to the minimum energy consumption index;
the optimization objective function in the UUV dynamic positioning control process mainly considers two parts of the motion consumption and the mechanical loss of the UUV, wherein the motion consumption comprises the linear distance motion work doing E of the UUV from the current point to the target positioning pointmAnd overcoming work done by ocean currents acting force Ec(ii) a The mechanical loss is brought by the mechanical efficiency of the UUV mechanical structure and is a function related to time, and the target to be optimized is the sum of the energy consumption of the UUV in the motion process and the mechanical loss of the UUV, so that two sub-functions of the optimization target can be obtained:
f1=E(v)=Em+Ec (1)
f2=kT(v) (2)
wherein f is1Representing the kinetic energy consumption of the UUV, f2The action time of the system is represented, and k is the loss coefficient of the machine. Setting the ocean current as constant-speed directional steady flow, decomposing and offsetting the transverse ocean current acting force by the UUV through horizontal auxiliary pushing, enabling the course to face the direction of a target locus and keeping the direction, then, in the process, changing the direction without turning the UUV, keeping the original thrust by the horizontal auxiliary pushing in the transverse direction to offset the ocean current action, and solving the optimal speed and adding the optimal thrust by the particle swarm algorithm in the longitudinal directionThe speed planning scheme is shown in figure 1.
In order to make the motion plan of the UUV fit with the reality as much as possible and avoid frequent changes of the acceleration, the motion of the UUV is set to comprise three sections of uniform acceleration, uniform speed and uniform deceleration. In order to avoid overshoot impact, the speed of the UUV when the UUV reaches the target positioning point is set to be 0, and the total range distance is equal to the distance between the initial point and the target point. UUV working against ocean current EcIncluding its energy consumption E in both x-axis and y-axis directionsx、Ey. The maximum movement speed of the UUV in the dynamic position control process is set as vmaxAnd then the UUV does work from the current point to the linear distance motion of the target positioning point EmOnly with UUV mass m and maximum speed of motion vmaxIn connection with, equations (1) and (2) can be further written as:

f2=kt3 (4)

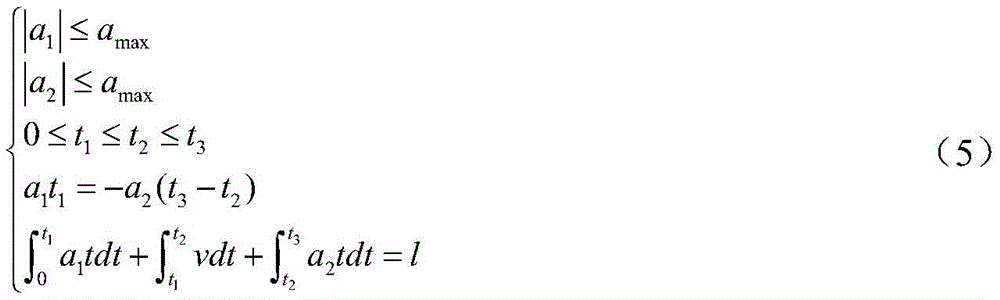
And setting the total movement distance of the UUV, namely the distance l between the initial position of the UUV and the target positioning point, and when the UUV reaches the end point, requiring the speed of the UUV to be 0. The following constraint can be obtained, where amaxThe basic parameters of the UUV thruster are calculated to obtain:
according to the above, by the weight coefficient τ1、τ2Converting the two optimization sub-functions into a single objective function to be optimized in the text as follows:
J=τ1f1+τ2f2 (6)
substituting the equations (3) and (4), and converting the two optimization sub-functions into a single objective function to be optimized through the weight coefficients:

wherein The variable to be solved optimally is a1,a2,vmax;vmaxI.e., the velocity of the UUV at the constant velocity section.
The variable to be solved optimally is a1,a2,vmax;vmaxI.e., the velocity of the UUV at the constant velocity section.
According to the objective function, the particle swarm optimization is used for carrying out optimization solution, the population size, the distribution position and the flight speed of each particle are used as system input, and the speed and the position of each particle are updated according to the following formula:


wherein c is1,c2For learning the factor, omega is an inertia factor, and the specific steps are as follows:
(1) and randomly initializing the distribution position and the flying speed of each particle according to the set initialization population size.
(2) According to the evaluation of energy consumptionTarget function J of the index, energy consumption index of the current positions of all the particles is calculated and recorded in each particle In (1). And comparing the energy consumption index size of each particle, and storing the energy consumption index optimal value of the optimal individual in the current whole population and the position of the individual in the gbest.
In (1). And comparing the energy consumption index size of each particle, and storing the energy consumption index optimal value of the optimal individual in the current whole population and the position of the individual in the gbest.
(3) And updating the position and the speed of each particle according to the particle updating formula, and recalculating the energy consumption index of the newly generated particles.
(4) And comparing the energy consumption index of each particle with the previously stored pbest size, and updating the pbest to be the current energy consumption index if the energy consumption index of the current particle is smaller.
(5) And comparing all pbest obtained in the current iteration process with the gbest recorded in the previous iteration period, and if the current pbest is better than the gbest in the previous iteration period, updating the gbest to be the pbest.
(6) And (4) circularly performing the steps (3) and (4) until the termination condition is met.
In the particle swarm optimization process, the particles with the minimum energy consumption index are finally output, and the optimal energy consumption index obtained by particle swarm optimization is used for obtaining the optimal planning scheme of the velocity and acceleration of the UUV when the UUV is far away from the target positioning point. The optimal planning scheme about the acceleration can be used for deducing the magnitude of the resultant external force on the UUV in each stage, then the UUV thrust planning scheme in the corresponding stage can be obtained by combining the known environmental information and the force decomposition and synthesis principle, and the UUV thrust planning scheme is kept to be executed to control the position and the course of the UUV until the UUV enters a II-level working area;
and 5: judging whether the UUV is in a II-level working area: if R is less than R1If yes, judging that the UUV is not in the II-level working area, and executing the step 6; otherwise, the UUV adopts a II-level control mode, and according to the deviation index, a model predictive control algorithm is used for real-time rolling and solving the optimal control quantity of the position and the course of the UUV.
The general motion form of each UUV monomer is low-speed motion, the mobility requirement is weak, the motion trend of the UUV can be properly estimated according to the current state of the UUV monomer, the output of an actuating mechanism and environmental information sensed by a sensor, the control deviation is used as input, the control quantity of the actuating mechanism is used as output, and the controller design of dynamic position control of a II-level working area of the UUV is considered by adopting improved generalized predictive control.
In the design process of the traditional generalized predictive controller, the performance index function is usually selected as follows:

it can be seen that only two items of output prediction error and control increment are considered in the performance index function, the energy consumption minimization in the dynamic position control process of the UUV is considered, and in order to avoid the output quantity from generating large overshoot and causing large fluctuation due to interference and the like in the measurement information input by the control system, the change fluctuation amplitude of the output quantity of the UUV is increased. For this purpose, the performance indicator function is improved by:

wherein,

R1、R2respectively, a flexible detention zone and a rigid detention zone radius, R1<R2;C1、C2A constant set empirically, C1<C2. Wherein n is the predicted length and s is the control length, and the relation 1 is satisfied<n, s is less than or equal to n; λ (j) is a control weighting coefficient, which is made constant λ; weighting coefficients for suppressing fluctuations; y (k) is an actually outputted control amount; y (k + j) is a future output control quantity of the UUV; Δ u (k + j) is 0, j is h, …, n, which indicates that the control amount is not changed after s beats; w (k) is the desired output value, typically taken as:
weighting coefficients for suppressing fluctuations; y (k) is an actually outputted control amount; y (k + j) is a future output control quantity of the UUV; Δ u (k + j) is 0, j is h, …, n, which indicates that the control amount is not changed after s beats; w (k) is the desired output value, typically taken as:
w(k+j)=αjy(k)+(1-αj)yd(j=1,2,…,n) (13)
wherein, alpha is a softening coefficient, ydGiving the system a desired state. Order to Wherein T isaIs the sampling period of the system. Let γ (j) be a constant value γ, the ripple suppression term in equation (11) can be written as:
Wherein T isaIs the sampling period of the system. Let γ (j) be a constant value γ, the ripple suppression term in equation (11) can be written as:

the term is the acceleration term of the UUV. Solving the minimum value of the criterion function by utilizing a particle swarm optimization algorithm to obtain a preferred control sequence:
ΔU=[Δu(k),Δu(k+1),…,Δu(k+s-1)]T (15)
namely:
ΔU=argminJ (16)
since only the first control quantity Δ U (k) in the control sequence Δ U is used each time the UUV is controlled as described above, the output of the UUV at a future time can be predicted using the following equation:

wherein, Yp0UUV control system predictions for p future times at time t-kT, with and without Δ u (k), respectivelyThe control output of (a) is,
Yp0UUV control system predictions for p future times at time t-kT, with and without Δ u (k), respectivelyThe control output of (a) is, Yp0=[y0(k+1),y0(k+2),…,y0(k+p)]T,a=[a1,a2,…,ap]Tis the value of the unit step response at each sampling instant.
Yp0=[y0(k+1),y0(k+2),…,y0(k+p)]T,a=[a1,a2,…,ap]Tis the value of the unit step response at each sampling instant.
Due to the uncertainty of the UUV collaborative observation task environment and the model of the UUV, after the control output at k moments acts, the actual control output y (k +1) of the UUV at k +1 moment and the predicted system output Not necessarily equal, and therefore constitutes a prediction error:
Not necessarily equal, and therefore constitutes a prediction error:

and according to the prediction error, performing weighted correction on the predicted values of other future moments to obtain:

wherein, the control output quantity at the time T (k +1) T predicted after the prediction error correction,
the control output quantity at the time T (k +1) T predicted after the prediction error correction, h is the prediction error correction vector, h ═ h1,h2,…,hp]T,h1=1。
h is the prediction error correction vector, h ═ h1,h2,…,hp]T,h1=1。
After the feedback correction The prediction initial value of the UUV generalized prediction dynamic position control system at the next moment is obtained becauseWhen predicting the output value at time T ═ T + 2T, …, T ═ T + p +1) T, the initial control prediction value at time T ═ T + 1T is used, so that the control is instructed to perform
The prediction initial value of the UUV generalized prediction dynamic position control system at the next moment is obtained becauseWhen predicting the output value at time T ═ T + 2T, …, T ═ T + p +1) T, the initial control prediction value at time T ═ T + 1T is used, so that the control is instructed to perform

The predicted value of the next moment can be obtained by the above formula pair, after the control action of delta u (k), the control output information of the moment of k +1 is collected, and a new round of prediction, correction and optimization is started, so that the UUV dynamic position control system becomes a closed-loop negative feedback system. And the UUV actuator control quantity continuously output in real time controls the position and navigation of the UUV in real time until the UUV reaches a target positioning point in the I-level working area.
Step 6: if the UUV receives the task ending instruction, the UUV ends the task; otherwise, the UUV adopts a I-level control mode, the optimal control quantity of the UUV course is solved in a real-time rolling mode by using a model predictive control algorithm according to the deviation index, the position is not controlled, and the step 3 is skipped after the optimal control quantity of the UUV course is solved in each beat.
The beneficial effect of the invention is that,
aiming at different requirements of the UUV in different working stages, a green dynamic position control scheme of the UUV is designed in a layered mode, so that the UUV has a set of control strategies suitable for the UUV in different states, a control curve of the dynamic position control can be changed in time, the aim of completing tasks with lower energy consumption and lower radiation noise of a propeller is finally achieved, a basic formation topological structure of a UUV cluster is kept as far as possible, and the UUV cluster completes a collaborative observation detection task
Example 1:
the embodiment of the invention relates to a UUV cluster green dynamic position control method for a collaborative observation and detection task, which comprises the following steps:
step 1: and selecting n (n is more than or equal to 1 and n is an integer) isomorphic UUV (unmanned underwater vehicle) to form a UUV cluster by combining the task type and the specific requirements.
Step 2: taking the dynamic position control task of the ith UUV (i is more than or equal to 1 and less than or equal to n, and i is an integer) as an example, setting the UUV to sail at a fixed depth according to the specific task requirement; and selecting a target positioning point in the proper working area, and recording longitude, latitude and heading information of the target positioning point.
And step 3: in a horizontal plane, with UUV target positioning points as circle centers, according to the requirements of different operation tasks on UUV position control ranges, respectively taking R as1,R2(R1<R2) And making circles for the radii to obtain different working areas divided in the horizontal plane, wherein the two circular areas are a class I working area and a class II working area respectively, and the part excluding the two areas in the horizontal plane is a class III working area, wherein the radius of each working area can be correspondingly adjusted according to different operation requirements.
And 4, step 4: and starting a dynamic position control task, updating the motion state information of the UUV on line in real time, and recording the current longitude, latitude, course, speed and information of each controlled quantity of the UUV.
And 5: according to longitude and latitude information of a target positioning point of the UUV and the current position, calculating the distance between the two points in real time, recording the distance as r, and determining a working area where the UUV is located:
when R < R1When the UUV is in the I-level working area;
when R is1<r<R2When the UUV is in the II-level working area;
when R is2When r is less than r, UUV is in III grade working area.
Step 6: and 5, judging whether the UUV is in a III-level working area or not according to the result of the step 5:
if yes, a III-level control mode is adopted, a multi-objective optimization function is established by taking the total time consumption T of the UUV motion energy consumption E, UUV task as an optimization target, the multi-objective optimization function is used as a minimum energy consumption index, a particle swarm algorithm is used, a thrust planning scheme with optimal energy consumption is obtained, namely, the global offline optimal planning is carried out on the controlled variable, and the position and the course of the UUV are controlled in the mode; once the optimal planning scheme is solved, the scheme is kept executed until the UUV enters a II-level working area;
otherwise, go directly to step 7.
And 7: judging whether the UUV is in a II-level working area:
if so, adopting a II-level control mode, using a model predictive control algorithm according to deviation indexes, considering minimization of energy consumption, adding an output prediction error, a control increment and an output variable quantity into a control target function to serve as a system optimization target, and performing real-time rolling solution on the optimal control quantity of the position and the course of the UUV until the UUV reaches a target positioning point in an I-level working area;
otherwise, go directly to step 8.
And 8: judging whether the UUV is in the I-level working area:
if yes, directly entering step 9;
otherwise, an exception is recorded and an alarm is raised, and then a jump is made to step 9.
And step 9: judging whether the UUV receives a task ending instruction:
if yes, ending the task;
otherwise, adopting a level I control mode, using a model predictive control algorithm according to deviation indexes, considering minimization of energy consumption, adding an output prediction error, a control increment and an output variable quantity into a control objective function to serve as a system optimization objective, carrying out real-time rolling to solve the optimal control quantity of the UUV course, not controlling the position, jumping to the step 5 after solving the control quantity in each beat, repeating the steps 5-8 until a task ending instruction is received, and ending the task.
In conclusion, the invention discloses a UUV cluster green dynamic position control method for a collaborative observation and detection task, and aims to solve the problem that long-time standby watching and array maintenance cannot be realized due to high energy consumption of a UUV cluster in the dynamic position control process. The method is respectively embedded into task computers of all members of a UUV cluster in a computer program mode, and comprises the following steps: when the UUV is determined to be in a III-level working area, a III-level control mode is adopted, namely, global offline optimal planning is carried out on the control quantity according to the minimum energy consumption index, and the position and the course of the UUV are controlled until the UUV enters a II-level working area; when the UUV is determined to be in the II-level working area, adopting a II-level control mode, namely performing real-time online optimization on the control quantity according to the deviation index, and controlling the position and the course of the UUV until the UUV reaches a target positioning point in the I-level working area; and when the UUV is determined to be in the I-level working area, adopting an I-level control mode, namely performing real-time online optimization on the control quantity according to the deviation index, controlling the course of the UUV only, and not controlling the position of the UUV until the UUV enters the II-level working area under the action of wind, waves and streams or receives a task ending instruction issued by an instruction control system. The method and the device are used for keeping the UUV cluster in an expected array form in the process of completing the dynamic position control task and achieving the effect of reducing energy consumption.
The above description is only a preferred embodiment of the present invention and is not intended to limit the present invention, and various modifications and changes may be made by those skilled in the art. Any modification, equivalent replacement, or improvement made within the spirit and principle of the present invention should be included in the protection scope of the present invention.
Claims (3)
1. A green dynamic position control method for UUV individuals in a UUV cluster is characterized by comprising the following steps:
step 1: according to the requirement of an operation task, a target positioning point of the UUV in an operation area during navigation at a fixed depth is set, and longitude, latitude and course information of the target positioning point are recorded;
step 2: in a horizontal plane, a UUV target positioning point is taken as a circle center, and R is respectively taken as1And R2Making a circle for the radius, and dividing the operation area into a first-level operation area, a second-level operation area and a third-level operation area; radius R1And R2Is set according to job task requirements, and R1<R2(ii) a The I-level working area takes a UUV target positioning point as the center of a circle and R as the center of a circle1A circular area of radius; the II-level working area takes the UUV target positioning point as the circle center and R as the circle center1And R2Is the annular region between two circles of radius; all parts except the I-level working area and the II-level working area in the working area are III-level working areas;
and step 3: starting a dynamic position control task, updating the motion state information of the UUV on line in real time, and recording the current longitude, latitude, course, speed and information of each control quantity of the UUV; calculating the distance r between two points in real time according to the current position of the UUV and the longitude and latitude information of the target positioning point;
and 4, step 4: judging whether the UUV is in a III-level working area: if R is less than or equal to R2If yes, judging that the UUV is not in the III-level working area, and executing the step 5; otherwise, the UUV adopts a III-level control mode, and a particle swarm algorithm is used for calculating a global optimal planning scheme of the position and the course of the UUV according to the minimum energy consumption index;
and 5: judging whether the UUV is in a II-level working area: if R is less than R1If yes, judging that the UUV is not in the II-level working area, and executing the step 6; otherwise, the UUV adopts a II-level control mode, and according to the deviation index, a model predictive control algorithm is used for solving the optimal control quantity of the position and the course of the UUV in a real-time rolling manner;
step 6: if the UUV receives the task ending instruction, the UUV ends the task; otherwise, the UUV adopts a I-level control mode, the optimal control quantity of the UUV course is solved in a real-time rolling mode by using a model predictive control algorithm according to the deviation index, the position is not controlled, and the step 3 is skipped after the optimal control quantity of the UUV course is solved in each beat.
2. The method for green dynamic position control of the UUV individuals in the UUV cluster as claimed in claim 1, wherein: in the step 4, the method for calculating the global optimal planning scheme of the position and the heading of the UUV by the UUV in the III-level control mode and the particle swarm algorithm by using the minimum energy consumption index specifically comprises the following steps:
setting the motion of the UUV to comprise three sections of uniform acceleration, uniform speed and uniform deceleration, wherein the speed of the UUV when the UUV reaches a target positioning point is 0; the single objective function to be optimized is:
wherein, tau1And τ2Is a weight coefficient; rho is seawaterDensity; interference force generated by ocean current on the UUV in the longitudinal direction;
interference force generated by ocean current on the UUV in the longitudinal direction; interference force generated by ocean currents on the UUV in the transverse direction; alpha is alphacThe flow direction angle of the ocean current relative to the UUV; cX(αc) Is the flow direction angle alphacCorresponding longitudinal ocean current drag coefficient; cY(αc) Is the flow direction angle alphacCorresponding transverse ocean current resistance coefficient; a. theTSThe longitudinal incident flow area of the UUV is defined; a. theLSThe area of the UUV in the transverse direction is UUV; vcIs the current velocity; sxThe sailing distance of the UUV along the x axis under the action of ocean current; syThe sailing distance of the UUV along the y axis under the action of ocean current; l is the distance between the initial position of the UUV and the target positioning point;
interference force generated by ocean currents on the UUV in the transverse direction; alpha is alphacThe flow direction angle of the ocean current relative to the UUV; cX(αc) Is the flow direction angle alphacCorresponding longitudinal ocean current drag coefficient; cY(αc) Is the flow direction angle alphacCorresponding transverse ocean current resistance coefficient; a. theTSThe longitudinal incident flow area of the UUV is defined; a. theLSThe area of the UUV in the transverse direction is UUV; vcIs the current velocity; sxThe sailing distance of the UUV along the x axis under the action of ocean current; syThe sailing distance of the UUV along the y axis under the action of ocean current; l is the distance between the initial position of the UUV and the target positioning point; the variable to be solved optimally is a1、a2、vmax;vmaxThe speed of the UUV constant speed section is obtained;
the variable to be solved optimally is a1、a2、vmax;vmaxThe speed of the UUV constant speed section is obtained;
according to the objective function, the particle swarm optimization is used for carrying out optimization solution, and the population size, the distribution position of each particle and the flight speed are used as system input; the updated formula for the velocity and position of the particle is:

wherein, c1,c2Is a learning factor; omega is an inertia factor; the method comprises the following specific steps:
step 4.1: randomly initializing the distribution position and the flying speed of each particle according to the set initialization population size;
step 4.2: according to an objective function J taking energy consumption as an evaluation index, calculating the energy consumption index of the current positions of all the particles, and recording the energy consumption index of each particle Performing the following steps; comparing the size of the energy consumption index of each particle, and storing the optimal value of the energy consumption index of the optimal individual in the current whole population and the position of the individual in the gbest;
Performing the following steps; comparing the size of the energy consumption index of each particle, and storing the optimal value of the energy consumption index of the optimal individual in the current whole population and the position of the individual in the gbest;
step 4.3: updating the position and the speed of each particle according to a particle updating formula, and recalculating the energy consumption index of the newly generated particle;
step 4.4: comparing the energy consumption index of each particle with the previously stored pbest size, and if the energy consumption index of the current particle is smaller, updating the pbest as the current energy consumption index;
step 4.5: comparing all pbest obtained in the current iteration process with the gbest recorded in the previous iteration period, and if the current pbest is better than the gbest in the previous iteration period, updating the gbest to be the pbest;
step 4.6: step 4.3 and step 4.4 are circularly carried out until the termination condition is met;
in the particle swarm optimization process, the particles with the minimum energy consumption index are finally output, and then the optimal energy consumption index obtained by particle swarm optimization is used for obtaining the optimal planning scheme of the velocity and acceleration of the UUV when the UUV is far away from the target positioning point; according to the optimal planning scheme about the acceleration, the magnitude of the resultant external force on the UUV in each stage can be deduced, then the UUV thrust planning scheme in the corresponding stage can be obtained by combining the known environmental information and the decomposition and synthesis principle of the force, and the UUV thrust planning scheme is kept to be executed to control the position and the course of the UUV until the UUV enters a II-level working area.
3. The method for green dynamic position control of UUV individuals in UUV cluster according to claim 1 or 2, characterized in that: in the step 5, the method for solving the optimal control quantity of the position and the course of the UUV in a real-time rolling manner by adopting a II-level control mode and using a model predictive control algorithm according to the deviation index specifically comprises the following steps:
the general motion form of each UUV monomer is low-speed motion, the mobility requirement is weak, the motion trend of the UUV can be properly estimated according to the current state of the UUV monomer, the output of an actuating mechanism and environmental information sensed by a sensor, the control deviation is used as input, and the control quantity of the actuating mechanism is used as output; adopting improved generalized predictive control to consider the controller design of UUV II-level working area dynamic position control; the performance index function is:


wherein R is1、R2Respectively, a flexible detention zone and a rigid detention zone radius, R1<R2;C1、C2A constant set empirically, C1<C2(ii) a n is the predicted length, s is the control length, 1<n, s is less than or equal to n; λ is a control weighting coefficient; y (k) is an actually outputted control amount; y (k + j) is the future output control quantity of the UUV; Δ u (k + j) is 0, j is h, …, n, which indicates that the control amount is not changed after s beats; y isdA desired state given to the system; t isaIs the sampling period of the system;
solving the minimum value of the performance index function by utilizing a particle swarm optimization algorithm to obtain an optimal control sequence:
ΔU=[Δu(k),Δu(k+1),…,Δu(k+s-1)]T
since only the first control quantity Δ U (k) in the control sequence Δ U is used each time the UUV is controlled as described above, the output of the UUV at a future time can be predicted using the following equation:

wherein, represents the predicted control output of the UUV control system at p future moments under the action of delta u (k) at the moment t-kT,
represents the predicted control output of the UUV control system at p future moments under the action of delta u (k) at the moment t-kT, Yp0denotes the predicted control output of the UUV control system at p future times without Δ u (k) at time t-kT, Yp0=[y0(k+1),y0(k+2),…,y0(k+p)]T;a=[a1,a2,…,ap]TIs the value of the unit step response at each sampling instant;
Yp0denotes the predicted control output of the UUV control system at p future times without Δ u (k) at time t-kT, Yp0=[y0(k+1),y0(k+2),…,y0(k+p)]T;a=[a1,a2,…,ap]TIs the value of the unit step response at each sampling instant;
due to the uncertainty of the UUV collaborative observation task environment and the model of the UUV, after the control output action at k moments, the actual control output y (k +1) of the UUV at k +1 moment and the predicted system output Not necessarily equal, and therefore constitutes a prediction error:
Not necessarily equal, and therefore constitutes a prediction error:

and according to the prediction error, performing weighted correction on the predicted values of other future moments to obtain:
wherein, the control output quantity at the time T (k +1) T predicted after the prediction error correction,
the control output quantity at the time T (k +1) T predicted after the prediction error correction, h is the prediction error correction vector, h ═ h1,h2,…,hp]T,h1=1;
h is the prediction error correction vector, h ═ h1,h2,…,hp]T,h1=1;
Will be feedback corrected As the initial prediction value at the next time of the UUV generalized predictive dynamic positioning system, the initial control prediction value at time T ═ T + 1T is used when predicting the output value at time T ═ T + 2T, …, and T ═ T + p + 1T, so that the order is such that
As the initial prediction value at the next time of the UUV generalized predictive dynamic positioning system, the initial control prediction value at time T ═ T + 1T is used when predicting the output value at time T ═ T + 2T, …, and T ═ T + p + 1T, so that the order is such that

The predicted value of the next moment can be obtained by the above formula pair, after the control action of delta u (k), the control output information of the moment of k +1 is collected, and a new round of prediction, correction and optimization is started, so that the UUV dynamic position control system becomes a closed-loop negative feedback system; and the UUV actuator control quantity continuously output in real time controls the position and navigation of the UUV in real time until the UUV reaches a target positioning point in the I-level working area.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011015811.0A CN112068577A (en) | 2020-09-24 | 2020-09-24 | Green dynamic position control method for UUV individuals in UUV cluster |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011015811.0A CN112068577A (en) | 2020-09-24 | 2020-09-24 | Green dynamic position control method for UUV individuals in UUV cluster |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112068577A true CN112068577A (en) | 2020-12-11 |
Family
ID=73684050
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011015811.0A Pending CN112068577A (en) | 2020-09-24 | 2020-09-24 | Green dynamic position control method for UUV individuals in UUV cluster |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112068577A (en) |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103970021A (en) * | 2014-05-21 | 2014-08-06 | 哈尔滨工程大学 | Relaxation power positioning control system based on model prediction control |
| US20160253906A1 (en) * | 2014-04-08 | 2016-09-01 | University Of New Hampshire | Optical Based Pose Detection For Multiple Unmanned Underwater Vehicles |
| CN106628048A (en) * | 2016-10-20 | 2017-05-10 | 哈尔滨工程大学 | Laser tracer of full-ocean-depth intelligent underwater robot |
| WO2017202633A1 (en) * | 2016-05-26 | 2017-11-30 | Tidal Generation Limited | Water current power generation systems |
| CN107797456A (en) * | 2017-11-09 | 2018-03-13 | 江苏方天电力技术有限公司 | Based on the plant dust catcher optimal control method of remembering online extreme learning machine of fading |
| CN107995719A (en) * | 2017-10-24 | 2018-05-04 | 北京臻迪科技股份有限公司 | Floating mobile body and light-emitting control method |
| CN108445762A (en) * | 2018-03-21 | 2018-08-24 | 青岛科技大学 | Power positioning control method based on UKF filtering and Constrained Model Predictive Control |
| CN108549234A (en) * | 2018-05-11 | 2018-09-18 | 江南大学 | A kind of multiobjective optimization control method based on dynamic variate |
| CN108594846A (en) * | 2018-03-23 | 2018-09-28 | 哈尔滨工程大学 | More AUV flight patterns optimal control methods under a kind of obstacle environment |
| CN109782779A (en) * | 2019-03-19 | 2019-05-21 | 电子科技大学 | AUV paths planning method under ocean current environment based on population meta-heuristic algorithms |
| CN110580057A (en) * | 2019-09-26 | 2019-12-17 | 哈尔滨工程大学 | UUV cluster formation method based on circumference layered planning |
| CN111045453A (en) * | 2019-12-25 | 2020-04-21 | 南京工程学院 | Cooperative control system and method based on unmanned ship and multi-underwater robot |
-
2020
- 2020-09-24 CN CN202011015811.0A patent/CN112068577A/en active Pending
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160253906A1 (en) * | 2014-04-08 | 2016-09-01 | University Of New Hampshire | Optical Based Pose Detection For Multiple Unmanned Underwater Vehicles |
| CN103970021A (en) * | 2014-05-21 | 2014-08-06 | 哈尔滨工程大学 | Relaxation power positioning control system based on model prediction control |
| WO2017202633A1 (en) * | 2016-05-26 | 2017-11-30 | Tidal Generation Limited | Water current power generation systems |
| CN106628048A (en) * | 2016-10-20 | 2017-05-10 | 哈尔滨工程大学 | Laser tracer of full-ocean-depth intelligent underwater robot |
| CN107995719A (en) * | 2017-10-24 | 2018-05-04 | 北京臻迪科技股份有限公司 | Floating mobile body and light-emitting control method |
| CN107797456A (en) * | 2017-11-09 | 2018-03-13 | 江苏方天电力技术有限公司 | Based on the plant dust catcher optimal control method of remembering online extreme learning machine of fading |
| CN108445762A (en) * | 2018-03-21 | 2018-08-24 | 青岛科技大学 | Power positioning control method based on UKF filtering and Constrained Model Predictive Control |
| CN108594846A (en) * | 2018-03-23 | 2018-09-28 | 哈尔滨工程大学 | More AUV flight patterns optimal control methods under a kind of obstacle environment |
| CN108549234A (en) * | 2018-05-11 | 2018-09-18 | 江南大学 | A kind of multiobjective optimization control method based on dynamic variate |
| CN109782779A (en) * | 2019-03-19 | 2019-05-21 | 电子科技大学 | AUV paths planning method under ocean current environment based on population meta-heuristic algorithms |
| CN110580057A (en) * | 2019-09-26 | 2019-12-17 | 哈尔滨工程大学 | UUV cluster formation method based on circumference layered planning |
| CN111045453A (en) * | 2019-12-25 | 2020-04-21 | 南京工程学院 | Cooperative control system and method based on unmanned ship and multi-underwater robot |
Non-Patent Citations (4)
| Title |
|---|
| 刘乐: "基于PSO优化模糊控制的船舶能量管理策略研究", 《武汉理工大学学报》 * |
| 徐健: "面向阵型保持的UUV集群绿色动态控位方法研究", 《仪器仪表学报》 * |
| 徐国焯: "多UUV编队路径跟踪控制研究", 《中国优秀硕士学位论文 信息科技辑》 * |
| 王磊: "基于PSO算法的多UUV导航方法", 《水下无人系统学报》 * |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111966118B (en) | ROV thrust distribution and reinforcement learning-based motion control method | |
| CN110308735B (en) | Under-actuated UUV trajectory tracking sliding mode control method aiming at input time lag | |
| CN108803321B (en) | Autonomous underwater vehicle track tracking control method based on deep reinforcement learning | |
| CN108803313B (en) | Path planning method based on ocean current prediction model | |
| CN114879671B (en) | Unmanned ship track tracking control method based on reinforcement learning MPC | |
| CN114967714B (en) | Autonomous underwater robot anti-interference motion control method and system | |
| Liu et al. | A hierarchical disturbance rejection depth tracking control of underactuated AUV with experimental verification | |
| CN116736709B (en) | Dynamic compensation type active disturbance rejection heading control method for marine robot | |
| Li et al. | Soft-switching proximate time optimal heading control for underactuated autonomous underwater vehicle | |
| Hu et al. | Trajectory tracking and re-planning with model predictive control of autonomous underwater vehicles | |
| CN116257067A (en) | Collaborative formation multi-level planning control method for unmanned ship cluster | |
| CN115657689B (en) | Autonomous underwater vehicle target tracking control method based on track prediction | |
| CN109828462A (en) | Wave glider becomes under the speed of a ship or plane adaptive bow to controller and control method | |
| CN115951581A (en) | High-speed unmanned ship path tracking control method based on improved EMPC | |
| CN111427356A (en) | Ship course interval control method and system | |
| CN112068577A (en) | Green dynamic position control method for UUV individuals in UUV cluster | |
| CN112506052B (en) | Control method for resisting rotational interference of holder of underwater archaeological robot | |
| CN115755891A (en) | Near-surface aircraft motion control method under high sea condition | |
| CN116610122A (en) | Unmanned ship path tracking method capable of stabilizing navigational speed and unmanned ship | |
| CN116520834A (en) | Low-energy-consumption unmanned ship cruising method | |
| Feng et al. | An adaptive position keeping algorithm for autonomous sailboats | |
| Abrougui et al. | Autopilot Design for an Unmanned Surface Vehicle Based on Backstepping Integral Technique with Experimental Results | |
| Nunez | Optimal control of the ac75 sailboat for the america’s cup race | |
| Rodriguez et al. | Adaptive Learning and Optimization of High-Speed Sailing Maneuvers for America's Cup | |
| Chen et al. | Research on Target Tracking System of Unmanned Surface Vehicle Based on Hierarchical Control Strategy |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20201211 |
|
| RJ01 | Rejection of invention patent application after publication |