基于PCL,分别实现了point2point,point2plane,plane2plane三种形式的icp算法,输入原始轨迹,并完成原始轨迹到真实轨迹(groudTruth)的对齐。
mkdir build cd build cmake .. make ./[target algorithm]
CMakeLists.txt 目录CMake配置文件 icp_pp.cpp 主文件
在icp_pp.cpp文件中分别有四个函数:
PointToPlane 对应点到面形式ICP实现 PointToPoint 对应点到点形式ICP实现 icpPlaneToPlane 对应面到面形式ICP实现 icpPointToPlane 对应另一种点到面ICP实现。
- 在yaml文件中导入tum格式的slam输出的轨迹:
slamTrajectoryFile, 真值轨迹gtTrajectoryFile和输出轨迹outputTrajectoryFile - 设置icp方法
icp_pattern:icpPlaneToPlane icpPointToPlane PointToPlane PointToPoint NDT - 设置初始参数
init_params:初值越准,匹配的效果越好
note:
- 一次成功不了,多试几种icp方法
- 初值要给定尽量和gt近似,不能相差太远,否则也会无法对齐轨迹
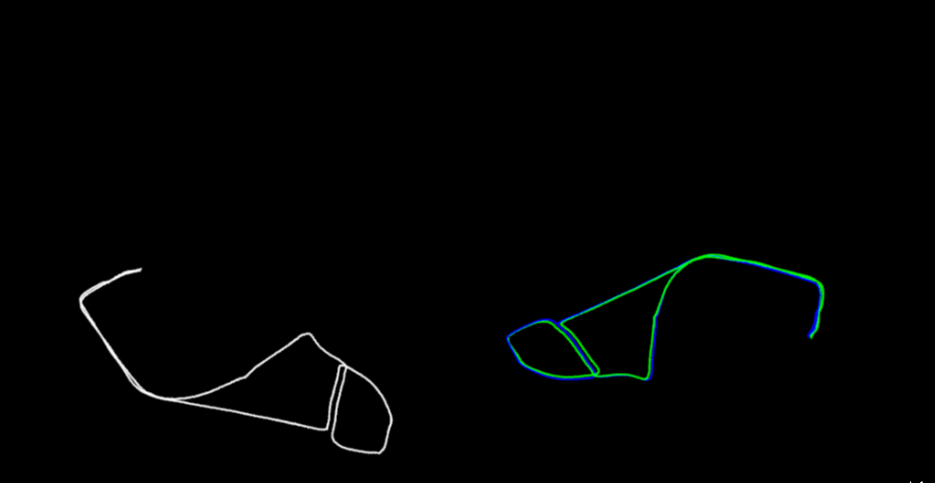
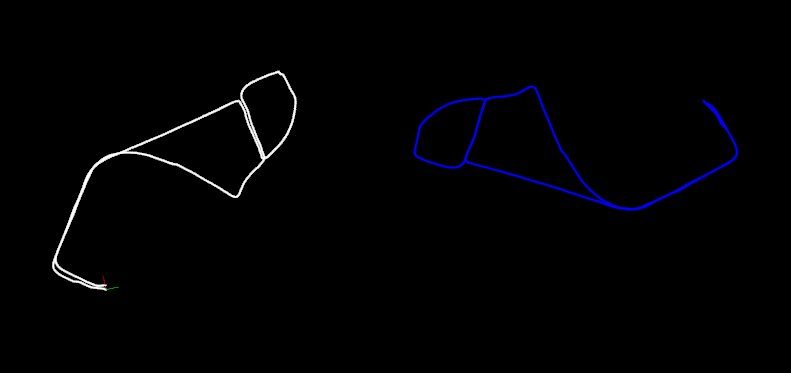
note: 白色是原轨迹,蓝色是真值轨迹,绿色是ICP对齐后的轨迹
对齐前:
icp对齐后: