WO2018026148A1 - Image encoding/decoding method and device, and recording medium storing bitstream - Google Patents
Image encoding/decoding method and device, and recording medium storing bitstream Download PDFInfo
- Publication number
- WO2018026148A1 WO2018026148A1 PCT/KR2017/008221 KR2017008221W WO2018026148A1 WO 2018026148 A1 WO2018026148 A1 WO 2018026148A1 KR 2017008221 W KR2017008221 W KR 2017008221W WO 2018026148 A1 WO2018026148 A1 WO 2018026148A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- block
- intra prediction
- mpm
- current block
- list
- Prior art date
Links
Images































































Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/119—Adaptive subdivision aspects, e.g. subdivision of a picture into rectangular or non-rectangular coding blocks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/13—Adaptive entropy coding, e.g. adaptive variable length coding [AVLC] or context adaptive binary arithmetic coding [CABAC]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/157—Assigned coding mode, i.e. the coding mode being predefined or preselected to be further used for selection of another element or parameter
- H04N19/159—Prediction type, e.g. intra-frame, inter-frame or bidirectional frame prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/174—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a slice, e.g. a line of blocks or a group of blocks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/30—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using hierarchical techniques, e.g. scalability
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/85—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using pre-processing or post-processing specially adapted for video compression
- H04N19/86—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using pre-processing or post-processing specially adapted for video compression involving reduction of coding artifacts, e.g. of blockiness
Definitions
- the present invention relates to a method and apparatus for image encoding / decoding. Specifically, the present invention relates to a video encoding / decoding method and apparatus using intra picture prediction, and a recording medium storing a bitstream generated by the video encoding method / apparatus of the present invention.
- HD high definition
- UHD ultra high definition
- An inter-screen prediction technique for predicting pixel values included in the current picture from a picture before or after the current picture using an image compression technology
- an intra-picture prediction technology for predicting pixel values included in the current picture using pixel information in the current picture
- transformation and quantization techniques for compressing the energy of the residual signal
- entropy coding technique for assigning short codes to high-frequency values and long codes for low-frequency values.
- Image data can be effectively compressed and transmitted or stored.
- An object of the present invention is to provide a video encoding / decoding method and apparatus having improved compression efficiency, and a recording medium storing a bitstream generated by the video encoding method / apparatus of the present invention.
- Another object of the present invention is to provide a video encoding / decoding method and apparatus using intra picture prediction with improved compression efficiency, and a recording medium storing a bitstream generated by the video encoding method and apparatus of the present invention.
- an object of the present invention is to provide a video image encoding / decoding method, apparatus for performing intra prediction using residual signal prediction, and a recording medium storing a bitstream generated by the video encoding method / apparatus of the present invention. do.
- An image decoding method for performing intra prediction on a current block includes: decoding first information indicating whether residual signal prediction for predicting a residual block of the current block is performed; If the first information indicates a first value, the method may include performing the residual signal prediction.
- the residual signal prediction may be performed based on a decoded reconstruction block.
- the image decoding method of the present invention further includes decoding an IDV (Inta Displacement Vector), and the decoded reconstruction block may be specified by the decoded IDV.
- IDV Intelligent Displacement Vector
- the image decoding method of the present invention may further include decoding an intra prediction mode used for the residual signal prediction, and generating a prediction block of the reconstructed block based on the decoded intra prediction mode. Can be.
- the image decoding method of the present invention further includes generating a residual block of the reconstructed block based on the reconstructed block and the prediction block of the reconstructed block, wherein the residual block of the reconstructed block is a residual block of the current block. It may be a prediction block of.
- the image decoding method of the present invention may further include decoding a secondary residual block of the current block, and generating a residual block of the current block based on the prediction block and the secondary residual block of the residual block of the current block. It may further comprise a step.
- the decoding of the IDV may be performed by using a predetermined search method, among a plurality of IDVs included in the predetermined search range. This can be done by selecting one.
- the predetermined search method may be the same search method used in the video encoding method.
- An image decoding apparatus including an intra picture prediction unit that performs an intra picture prediction on a current block according to the present invention, decodes first information indicating whether residual signal prediction for predicting a residual block of the current block is performed.
- the first information may include an intra prediction unit configured to perform the residual signal prediction.
- An image encoding method for performing intra prediction on a current block may include performing residual signal prediction for predicting a residual block of the current block, and indicating whether the residual signal prediction is performed. 1 may include encoding the information.
- the residual signal prediction may be performed based on a decoded reconstruction block.
- the image encoding method of the present invention may further include encoding an IDV (Inta Displacement Vector) that specifies the decoded reconstruction block.
- IDV Intelligent Displacement Vector
- the image encoding method of the present invention may include determining an intra prediction mode used for the residual signal prediction, generating a prediction block of the reconstructed block based on the determined intra prediction mode, and determining the intra intra prediction mode.
- the method may further include encoding the prediction mode.
- the predetermined search method may include comparing a cost function value of a residual block of the current block with a cost function value of a secondary residual block of the current block.
- An image encoding apparatus including an intra picture prediction unit that performs an intra picture prediction on a current block according to the present invention, performs a residual signal prediction for predicting a residual block of the current block, and determines whether the residual signal prediction is performed. It may include an intra prediction unit for encoding the first information indicating the.
- a bitstream generated by an image encoding method may include storing first information indicating whether residual signal prediction is performed.
- a video encoding / decoding method and apparatus having improved compression efficiency, and a recording medium storing a bitstream generated by the video encoding method / device of the present invention.
- a video encoding / decoding method and apparatus using intra picture prediction with improved compression efficiency and a recording medium storing a bitstream generated by the video encoding method / device of the present invention.
- a video image encoding / decoding method for performing intra prediction using residual signal prediction, and a recording medium storing a bitstream generated by the video encoding method / device of the present invention.
- FIG. 1 is a block diagram illustrating a configuration of an encoding apparatus according to an embodiment of the present invention.
- FIG. 2 is a block diagram illustrating a configuration of a decoding apparatus according to an embodiment of the present invention.
- FIG. 3 is a diagram schematically illustrating a division structure of an image when encoding and decoding an image.
- FIG. 4 is a diagram illustrating a form of a prediction unit PU that may be included in the coding unit CU.
- FIG. 5 is a diagram illustrating a form of a transform unit (TU) that a coding unit CU may include.
- TU transform unit
- FIG. 6 is a diagram for explaining an embodiment of an intra prediction process.
- FIG. 7 is a diagram for explaining an embodiment of an inter prediction process.
- FIG. 8 is a diagram for describing a transform set according to an intra prediction mode.
- 9 is a view for explaining the process of the conversion.
- 10 is a diagram for describing scanning of quantized transform coefficients.
- 11 is a diagram for explaining block division.
- FIG. 12 is a diagram for describing a method of performing intra prediction on a current block according to an embodiment of the present invention.
- FIG. 13 is a diagram for describing a method of deriving an intra prediction mode of a current block from a neighboring block.
- FIG. 14 is an exemplary diagram for describing a current block, an upper block, and an adjacent block.
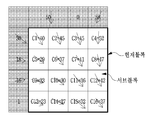
- 15 is an exemplary diagram illustrating a luminance block and a color difference block when the ratio between color components is 4: 2: 0.
- FIG. 16 is a diagram for describing an embodiment in which a current block is divided into one or more subblocks to derive an intra prediction mode of each subblock.
- FIG. 17 is a diagram illustrating an embodiment in which a current block is divided into sub blocks.
- FIG. 18 illustrates another embodiment in which a current block is divided into sub blocks.
- FIG. 19 illustrates another embodiment in which a current block is divided into subblocks.
- 20 is a diagram illustrating another embodiment in which a current block is divided into sub blocks.
- FIG. 21 is a diagram illustrating an example of deriving an intra prediction mode of a current block by using an intra prediction mode.
- FIG. 22 is a diagram illustrating an embodiment of constructing a SPIPM list including two SPIPMs.
- FIG. 23 is a diagram illustrating an embodiment of configuring a SPIPM list including three SPIPMs.
- FIG. 24 is a diagram illustrating an embodiment of constructing a SPIPM list including four SPIPMs.
- FIG. 25 is a diagram exemplarily illustrating a size of a sub block when the size of a current block is 16 ⁇ 16.
- FIG. 26 illustrates an example of allocating an intra prediction mode using the determined IPDF.
- 27 is a diagram exemplarily illustrating adjacent reconstructed blocks of a current block.
- FIG. 28 is a diagram for describing an embodiment of deriving an intra prediction mode using adjacent reconstruction blocks.
- FIG. 29 is a diagram for describing an embodiment of deriving an intra prediction mode on a sub-block basis.
- FIG. 30 is a diagram for describing another embodiment of deriving an intra prediction mode on a sub-block basis.
- 31 is a diagram illustrating a syntax structure including information about an intra prediction mode.
- 32 is a diagram illustrating surrounding reconstructed sample lines that may be used for in-picture prediction of a current block.
- 33 is a diagram for describing an embodiment of configuring a reference sample for a subblock included in a current block.
- FIG. 34 is a diagram for describing a method of replacing an unavailable restoration sample by using an available restoration sample.
- 35 is a diagram illustrating a threshold for each block size for determining whether to filter.
- 36 is a diagram exemplarily illustrating whether filtering is performed according to a block size and / or an intra prediction mode.
- 37 is an exemplary diagram for describing intra prediction according to a shape of a current block.
- FIG. 38 is a diagram for describing filtering during intra prediction in a DC mode.
- 39 is a diagram for describing intra prediction in a planar mode.
- 40 is a view for explaining one embodiment of generating a one-dimensional array (1-D reference sample array, p 1, ref) of the reference sample from P ref.
- FIG. 41 is a view for explaining an embodiment using reference samples of different angles according to sample positions in a prediction block.
- FIG. 43 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 42.
- FIG. 45 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 44.
- FIG. 47 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 46.
- FIG. 49 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 48.
- FIG. 51 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 50.
- cw0 1.0
- cw1 1.4
- cw2 1.8
- cw3 2.2 for a current block having a size of 4x4. It is for the drawing.
- FIG. 53 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 52.
- FIG. 55 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 54.
- FIG. 57 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 56.
- FIG. 58 illustrates another embodiment using different directional modes in units of samples in a target block.
- 59 is a view for explaining an embodiment of predicting a residual signal.
- 60 is a diagram for explaining prediction of a residual signal using a secondary residual signal block.
- 61 is a diagram to describe an embodiment of a residual signal prediction.
- 62 is a diagram for explaining an embodiment of performing a residual signal prediction in an encoder.
- 63 is a diagram for explaining an embodiment of performing residual signal prediction in a decoder.
- first and second may be used to describe various components, but the components should not be limited by the terms. The terms are used only for the purpose of distinguishing one component from another.
- the first component may be referred to as the second component, and similarly, the second component may also be referred to as the first component.
- any component of the invention When any component of the invention is said to be “connected” or “connected” to another component, it may be directly connected to or connected to that other component, but other components may be present in between. It should be understood that it may. On the other hand, when a component is referred to as being “directly connected” or “directly connected” to another component, it should be understood that there is no other component in between.
- each component shown in the embodiments of the present invention are shown independently to represent different characteristic functions, and do not mean that each component is made of separate hardware or one software component unit.
- each component is included in each component for convenience of description, and at least two of the components may be combined into one component, or one component may be divided into a plurality of components to perform a function.
- Integrated and separate embodiments of the components are also included within the scope of the present invention without departing from the spirit of the invention.
- Some components of the present invention are not essential components for performing essential functions in the present invention but may be optional components for improving performance.
- the present invention can be implemented including only the components essential for implementing the essentials of the present invention except for the components used for improving performance, and the structure including only the essential components except for the optional components used for improving performance. Also included in the scope of the present invention.
- an image may mean one picture constituting a video and may represent a video itself.
- "encoding and / or decoding of an image” may mean “encoding and / or decoding of a video” and may mean “encoding and / or decoding of one of images constituting the video.” It may be.
- the picture may have the same meaning as the image.
- Encoder This may mean an apparatus for performing encoding.
- Decoder Refers to an apparatus for performing decoding.
- Parsing This may mean determining a value of a syntax element by entropy decoding or may refer to entropy decoding itself.
- An MxN array of samples where M and N are positive integer values, and a block can often mean a two-dimensional sample array.
- Sample This is a basic unit that constitutes a block and can represent values from 0 to 2 Bd -1 depending on the bit depth (B d ).
- the pixel and the pixel may be used as the sample.
- Unit may mean a unit of image encoding and decoding.
- a unit may be an area generated by division of one image.
- a unit may mean a divided unit when a single image is divided into subdivided units to be encoded or decoded.
- a predetermined process may be performed for each unit.
- One unit may be further divided into subunits having a smaller size than the unit.
- the unit may be a block, a macroblock, a coding tree unit, a coding tree block, a coding unit, a coding block, a prediction. It may mean a unit, a prediction block, a transform unit, a transform block, or the like.
- the unit may refer to a luma component block, a chroma component block corresponding thereto, and a syntax element for each block in order to refer to the block separately.
- the unit may have various sizes and shapes, and in particular, the shape of the unit may include a geometric figure that can be expressed in two dimensions such as a square, a trapezoid, a triangle, a pentagon, as well as a rectangle.
- the unit information may include at least one of a type of a unit indicating a coding unit, a prediction unit, a transformation unit, and the like, a size of a unit, a depth of a unit, an encoding and decoding order of the unit, and the like.
- a reconstructed neighbor unit may refer to a unit that has already been encoded or decoded in a spatial / temporal manner around the encoding / decoding target unit.
- the restored peripheral unit may mean a restored peripheral block.
- a neighbor block may mean a block adjacent to an encoding / decoding target block.
- the block adjacent to the encoding / decoding object block may mean a block in which a boundary of the encoding / decoding object block abuts.
- the neighboring block may mean a block located at an adjacent vertex of the encoding / decoding target block.
- the neighboring block may mean a restored neighboring block.
- Unit Depth It means the degree of unit division. In the tree structure, the root node has the smallest depth, and the leaf node has the deepest depth.
- This may mean a encoding / decoding target unit syntax element, a coding parameter, a value of a transform coefficient, or the like.
- Parameter set may correspond to header information among structures in the bitstream, and includes a video parameter set, a sequence parameter set, a picture parameter set, and an adaptive parameter set. At least one or more of the adaptation parameter set may be included in the parameter set.
- the parameter set may have a meaning including slice header and tile header information.
- Bitstream may mean a string of bits including encoded image information.
- Prediction Unit This is a basic unit when performing inter prediction or intra prediction and compensation thereof, and one prediction unit may be divided into a plurality of partitions having a small size. In this case, each of the plurality of partitions becomes a basic unit at the time of performing the prediction and compensation, and the partition in which the prediction unit is divided may also be called a prediction unit.
- the prediction unit may have various sizes and shapes, and in particular, the shape of the prediction unit may include a geometric figure that can be expressed in two dimensions such as a square, a trapezoid, a triangle, a pentagon, as well as a rectangle.
- Prediction Unit Partition This may mean a form in which a prediction unit is divided.
- Reference Picture List refers to a list including one or more reference pictures used for inter prediction or motion compensation.
- the types of reference picture lists may be LC (List Combined), L0 (List 0), L1 (List 1), L2 (List 2), L3 (List 3), and the like. Lists can be used.
- Inter Prediction Indicator It may mean the inter prediction direction (unidirectional prediction, bi-directional prediction, etc.) of the block to be encoded / decoded during inter prediction, and the block to be encoded / decoded will generate the prediction block. This may mean the number of reference pictures used, and may mean the number of prediction blocks used when the encoding / decoding target block performs inter prediction or motion compensation.
- a reference picture index may mean an index of a specific reference picture in the reference picture list.
- the index may mean an index.
- Reference Picture Refers to an image referred to by a specific unit for inter prediction or motion compensation.
- the reference picture may also be referred to as a reference picture.
- Motion Vector A two-dimensional vector used for inter prediction or motion compensation, and may mean an offset between an encoding / decoding target image and a reference image.
- (mvX, mvY) may represent a motion vector
- mvX may represent a horizontal component
- mvY may represent a vertical component.
- Motion Vector Candidate When a motion vector is predicted, it may mean a unit which is a prediction candidate or a motion vector of the unit.
- a motion vector candidate list may mean a list constructed using motion vector candidates.
- Motion Vector Candidate Index An indicator indicating a motion vector candidate in a motion vector candidate list, and may be referred to as an index of a motion vector predictor.
- Motion Information Information including at least one of a motion vector, a reference picture index, an inter prediction indicator, as well as reference picture list information, a reference picture, a motion vector candidate, and a motion vector candidate index. It may mean.
- a merge candidate list may mean a list constructed using merge candidates.
- Merge Candidate may include a spatial merge candidate, a temporal merge candidate, a combined merge candidate, a combined two-prediction merge candidate, a zero merge candidate, and the like.
- the merge candidate may include prediction type information and each list. It may include motion information such as a reference picture index and a motion vector.
- Merge Index refers to information indicating a merge candidate in the merge candidate list.
- the merge index may indicate a block in which a merge candidate is derived among blocks reconstructed adjacent to the current block in a spatial / temporal manner.
- the merge index may indicate at least one or more of the motion information that the merge candidate has.
- a transform unit may refer to a basic unit when performing residual signal encoding / decoding such as transform, inverse transform, quantization, inverse quantization, and transform coefficient encoding / decoding. It may be divided into a plurality of transform units having a small size.
- the transform unit may have various sizes and shapes, and in particular, the shape of the transform unit may include a geometric figure that can be expressed in two dimensions such as a square, a trapezoid, a triangle, a pentagon, as well as a rectangle.
- Scaling This may mean a process of multiplying a transform coefficient level by a factor and generating a transform coefficient as a result. Scaling can also be called dequantization.
- a quantization parameter may mean a value used when scaling transform coefficient levels in quantization and inverse quantization.
- the quantization parameter may be a value mapped to a quantization step size.
- a quantization parameter may mean a differential value between the predicted quantization parameter and the quantization parameter of the encoding / decoding target unit.
- Scan Refers to a method of arranging the order of coefficients in a block or matrix. For example, aligning a two-dimensional array into a one-dimensional array is called a scan, and a one-dimensional array into a two-dimensional array. Sorting can also be called scan or inverse scan.
- Transform Coefficient A coefficient value generated after performing a transform, and in the present invention, a quantized transform coefficient level in which quantization is applied to the transform coefficient may also be included in the meaning of the transform coefficient.
- Non-zero Transform Coefficient may mean a transform coefficient whose magnitude is not zero or a transform coefficient level whose magnitude is not zero.
- Quantization Matrix A matrix used in a quantization or inverse quantization process to improve the subjective or objective image quality of an image.
- the quantization matrix may also be called a scaling list.
- Quantization Matrix Coefficient It may mean each element in the quantization matrix. Quantization matrix coefficients may also be referred to as matrix coefficients.
- a predetermined matrix may mean a predetermined quantization matrix defined in the encoder and the decoder.
- Non-default Matrix A non-default matrix, which is not defined in the encoder and the decoder, may be a quantization matrix signaled by a user.
- a coding component may be composed of two color difference component (Cb, Cr) coding tree blocks associated with one luminance component (Y) coding tree block.
- Each coding tree unit may be split using one or more partitioning methods such as a quad tree and a binary tree to form sub-units such as a coding unit, a prediction unit, and a transform unit. It may be used as a term for a pixel block that becomes a processing unit in a decoding / encoding process of an image, such as splitting an input image.
- Coding Tree Block A term used to refer to any one of a Y coded tree block, a Cb coded tree block, and a Cr coded tree block.
- FIG. 1 is a block diagram illustrating a configuration of an encoding apparatus according to an embodiment of the present invention.
- the encoding apparatus 100 may be a video encoding apparatus or an image encoding apparatus.
- the video may include one or more images.
- the encoding apparatus 100 may sequentially encode one or more images of the video over time.
- the encoding apparatus 100 may include a motion predictor 111, a motion compensator 112, an intra predictor 120, a switch 115, a subtractor 125, a transformer 130, and quantization.
- the unit 140 may include an entropy encoder 150, an inverse quantizer 160, an inverse transform unit 170, an adder 175, a filter unit 180, and a reference picture buffer 190.
- the encoding apparatus 100 may encode the input image in an intra mode and / or an inter mode. In addition, the encoding apparatus 100 may generate a bitstream through encoding of an input image, and may output the generated bitstream.
- the switch 115 When the intra mode is used as the prediction mode, the switch 115 may be switched to intra, and when the inter mode is used as the prediction mode, the switch 115 may be switched to inter.
- the intra mode may mean an intra prediction mode
- the inter mode may mean an inter prediction mode.
- the encoding apparatus 100 may generate a prediction block for the input block of the input image. In addition, after the prediction block is generated, the encoding apparatus 100 may encode a residual between the input block and the prediction block.
- the input image may be referred to as a current image that is a target of current encoding.
- the input block may be referred to as a current block or an encoding target block that is a target of the current encoding.
- the intra prediction unit 120 may use the pixel value of a block that is already encoded around the current block as a reference pixel.
- the intra predictor 120 may perform spatial prediction using the reference pixel, and generate prediction samples for the input block through spatial prediction.
- Intra prediction may refer to intra prediction.
- the motion predictor 111 may search an area that best matches the input block from the reference image in the motion prediction process, and derive a motion vector using the searched area.
- the reference picture may be stored in the reference picture buffer 190.
- the motion compensator 112 may generate a prediction block by performing motion compensation using a motion vector.
- the motion vector may be a two-dimensional vector used for inter prediction.
- the motion vector may indicate an offset between the current picture and the reference picture.
- inter prediction may mean inter prediction.
- the motion predictor 111 and the motion compensator 112 may generate a prediction block by applying an interpolation filter to a part of a reference image when the motion vector does not have an integer value.
- a motion prediction and motion compensation method of a prediction unit included in a coding unit based on a coding unit may be skip mode, merge mode, or AMVP mode. ), It may be determined which method is the current picture reference mode, and inter prediction or motion compensation may be performed according to each mode.
- the current picture reference mode may mean a prediction mode using a pre-restored region in the current picture to which the encoding target block belongs.
- a motion vector for the current picture reference mode may be defined to specify the pre-restored region. Whether the encoding target block is encoded in the current picture reference mode may be encoded using the reference image index of the encoding target block.
- the subtractor 125 may generate a residual block using the difference between the input block and the prediction block.
- the residual block may be referred to as the residual signal.
- the transform unit 130 may generate a transform coefficient by performing transform on the residual block, and output a transform coefficient.
- the transform coefficient may be a coefficient value generated by performing transform on the residual block.
- the transform unit 130 may omit the transform on the residual block.
- Quantized transform coefficient levels may be generated by applying quantization to the transform coefficients.
- the quantized transform coefficient level may also be referred to as transform coefficient.
- the quantization unit 140 may generate a quantized transform coefficient level by quantizing the transform coefficient according to the quantization parameter, and output the quantized transform coefficient level. In this case, the quantization unit 140 may quantize the transform coefficients using the quantization matrix.
- the entropy encoder 150 may generate a bitstream by performing entropy encoding according to probability distribution on values calculated by the quantizer 140 or coding parameter values calculated in the encoding process. And output a bitstream.
- the entropy encoder 150 may perform entropy encoding on information for decoding an image in addition to information on pixels of an image.
- the information for decoding the image may include a syntax element.
- the entropy encoder 150 may use an encoding method such as exponential Golomb, context-adaptive variable length coding (CAVLC), or context-adaptive binary arithmetic coding (CABAC) for entropy encoding.
- an encoding method such as exponential Golomb, context-adaptive variable length coding (CAVLC), or context-adaptive binary arithmetic coding (CABAC) for entropy encoding.
- CABAC context-adaptive binary arithmetic coding
- the entropy encoder 150 may perform entropy coding using a variable length coding (VLC) table.
- VLC variable length coding
- the entropy encoder 150 derives a binarization method of a target symbol and a probability model of a target symbol / bin, and then performs arithmetic coding using the derived binarization method or a probability model. You may.
- the entropy encoder 150 may change a two-dimensional block shape coefficient into a one-dimensional vector form through a transform coefficient scanning method to encode a transform coefficient level.
- a transform coefficient scanning method For example, upright scanning can be used to scan the coefficients of a block to change it into a one-dimensional vector.
- a vertical scan that scans two-dimensional block shape coefficients in a column direction instead of an upright scan and a horizontal scan that scans two-dimensional block shape coefficients in a row direction may be used. That is, according to the size of the conversion unit and the intra prediction mode, it is possible to determine which scan method among upright scan, vertical scan and horizontal scan is used.
- a coding parameter may include information derived from an encoding or decoding process as well as information encoded by an encoder and signaled to a decoder, such as a syntax element, and may mean information required when encoding or decoding an image. have. For example, block size, block depth, block splitting information, unit size, unit depth, unit splitting information, quadtree split flag, binary tree split flag, binary tree split direction, intra prediction mode, Intra prediction direction, reference sample filtering method, prediction block boundary filtering method, filter tab, filter coefficient, inter prediction mode, motion information, motion vector, reference image index, inter prediction direction, inter prediction indicator, reference image list , Motion vector predictor, motion vector candidate list, motion merge mode, motion merge candidate, motion merge candidate list, skip mode, interpolation filter type, motion vector size, motion vector representation accuracy , Transform type, transform size, additional (secondary) transform availability information, residual signal presence information, coded block pattern, Coded Block Flag, Quantization Parameter, Quantization Matrix, In-loop Filter Information, In-loop Fil
- the residual signal may mean a difference between the original signal and the prediction signal.
- the residual signal may be a signal generated by transforming a difference between the original signal and the prediction signal.
- the residual signal may be a signal generated by transforming and quantizing the difference between the original signal and the prediction signal.
- the residual block may be a residual signal in block units.
- the encoded current image may be used as a reference image with respect to other image (s) to be processed later. Therefore, the encoding apparatus 100 may decode the encoded current image again and store the decoded image as a reference image. Inverse quantization and inverse transform on the encoded current image may be processed for decoding.
- the quantized coefficients may be dequantized in inverse quantization unit 160.
- the inverse transform unit 170 may perform an inverse transform.
- the inverse quantized and inverse transformed coefficients may be summed with the prediction block via the adder 175.
- a reconstructed block may be generated by adding the inverse quantized and inverse transformed coefficients and the prediction block.
- the recovery block may pass through the filter unit 180.
- the filter unit 180 may apply at least one of a deblocking filter, a sample adaptive offset (SAO), and an adaptive loop filter (ALF) to the reconstructed block or the reconstructed image. Can be.
- the filter unit 180 may be referred to as an in-loop filter.
- the deblocking filter may remove block distortion generated at boundaries between blocks.
- it may be determined whether to apply the deblocking filter to the current block based on the pixels included in the several columns or rows included in the block.
- a strong filter or a weak filter may be applied according to the required deblocking filtering strength.
- horizontal filtering and vertical filtering may be performed in parallel when vertical filtering and horizontal filtering are performed.
- the sample adaptive offset may add an appropriate offset value to the pixel value to compensate for the encoding error.
- the sample adaptive offset may correct the offset with the original image on a pixel basis for the deblocked image.
- the pixels included in the image are divided into a predetermined number of areas, and then, the area to be offset is determined and the offset is applied to the corresponding area or the offset considering the edge information of each pixel. You can use this method.
- the adaptive loop filter may perform filtering based on a comparison value between the reconstructed image and the original image. After dividing the pixels included in the image into a predetermined group, one filter to be applied to the group may be determined and filtering may be performed for each group. For information related to whether to apply the adaptive loop filter, the luminance signal may be signaled for each coding unit (CU), and the shape and filter coefficient of the adaptive loop filter to be applied according to each block may vary. In addition, an adaptive loop filter of the same type (fixed form) may be applied regardless of the characteristics of the block to be applied.
- the reconstructed block that has passed through the filter unit 180 may be stored in the reference picture buffer 190.
- FIG. 2 is a block diagram illustrating a configuration of a decoding apparatus according to an embodiment of the present invention.
- the decoding apparatus 200 may be a video decoding apparatus or an image decoding apparatus.
- the decoding apparatus 200 may include an entropy decoder 210, an inverse quantizer 220, an inverse transform unit 230, an intra predictor 240, a motion compensator 250, and an adder 255.
- the filter unit 260 may include a reference picture buffer 270.
- the decoding apparatus 200 may receive a bitstream output from the encoding apparatus 100.
- the decoding apparatus 200 may decode the bitstream in an intra mode or an inter mode.
- the decoding apparatus 200 may generate a reconstructed image through decoding and output the reconstructed image.
- the switch When the prediction mode used for decoding is an intra mode, the switch may be switched to intra. When the prediction mode used for decoding is an inter mode, the switch may be switched to inter.
- the decoding apparatus 200 may obtain a reconstructed residual block from the input bitstream, and generate a prediction block. When the reconstructed residual block and the prediction block are obtained, the decoding apparatus 200 may generate a reconstruction block that is a decoding target block by adding the reconstructed residual block and the prediction block.
- the decoding target block may be referred to as a current block.
- the entropy decoder 210 may generate symbols by performing entropy decoding according to a probability distribution of the bitstream.
- the generated symbols may include symbols in the form of quantized transform coefficient levels.
- the entropy decoding method may be similar to the entropy encoding method described above.
- the entropy decoding method may be an inverse process of the above-described entropy encoding method.
- the entropy decoder 210 may change the one-dimensional vector form coefficient into a two-dimensional block form through a transform coefficient scanning method.
- a transform coefficient scanning method For example, upright scanning can be used to scan the coefficients of a block to change it into a two-dimensional block shape.
- vertical scan or horizontal scan may be used instead of upright scan. That is, according to the size of the conversion unit and the intra prediction mode, it is possible to determine which scan method among upright scan, vertical scan and horizontal scan is used.
- the quantized transform coefficient level may be inversely quantized by the inverse quantizer 220 and inversely transformed by the inverse transformer 230.
- a reconstructed residual block may be generated.
- the inverse quantization unit 220 may apply a quantization matrix to the quantized transform coefficient level.
- the intra predictor 240 may generate a prediction block by performing spatial prediction using pixel values of blocks that are already decoded around the decoding target block.
- the motion compensator 250 may generate a predictive block by performing motion compensation using a reference vector stored in the motion vector and the reference picture buffer 270.
- the motion compensator 250 may generate a prediction block by applying an interpolation filter to a portion of the reference image.
- a motion compensation method of a prediction unit included in a coding unit is selected from among skip mode, merge mode, AMVP mode, and current picture reference mode. It may be determined whether or not it is a method, and motion compensation may be performed according to each mode.
- the current picture reference mode may mean a prediction mode using a pre-restored region in the current picture to which the decoding target block belongs.
- a motion vector for the current picture reference mode may be used to specify the pre-restored region.
- a flag or index indicating whether the decoding object block is a block encoded in the current picture reference mode may be signaled or inferred through a reference picture index of the decoding object block.
- the current picture may exist at a fixed position (eg, the position at which the reference image index is 0 or the last position) in the reference image list for the decoding object block.
- the reference picture index may be variably positioned in the reference picture list, and a separate reference picture index indicating the location of the current picture may be signaled for this purpose.
- signaling a flag or index may mean that the encoder entropy encodes the flag or index and includes the flag or index in the bitstream, and the decoder entropy decodes the corresponding flag or index from the bitstream. Entropy Decoding).
- the reconstructed residual block and the prediction block may be added through the adder 255.
- the generated block may pass through the filter unit 260.
- the filter unit 260 may apply at least one or more of a deblocking filter, a sample adaptive offset, and an adaptive loop filter to the reconstructed block or the reconstructed image.
- the filter unit 260 may output the reconstructed image.
- the reconstructed picture may be stored in the reference picture buffer 270 and used for inter prediction.
- 3 is a diagram schematically illustrating a division structure of an image when encoding and decoding an image. 3 schematically shows an embodiment in which one unit is divided into a plurality of sub-units.
- a coding unit may be used in encoding and decoding.
- the coding unit may mean a coding unit.
- a unit may be a term that collectively refers to a block including 1) a syntax element and 2) image samples.
- "division of a unit” may mean “division of a block corresponding to a unit”.
- the block division information may include information about a depth of a unit. The depth information may indicate the number and / or degree of division of the unit.
- the image 300 is sequentially divided into units of a largest coding unit (LCU), and a split structure is determined by units of an LCU.
- the LCU may be used as the same meaning as a coding tree unit (CTU).
- CTU coding tree unit
- One unit may be hierarchically divided with depth information based on a tree structure. Each divided subunit may have depth information. Since the depth information indicates the number and / or degree of division of the unit, the depth information may include information about the size of the sub-unit.
- the partition structure may mean a distribution of a coding unit (CU) in the LCU 310.
- the CU may be a unit for efficiently encoding / decoding an image. This distribution may be determined according to whether to divide one CU into a plurality of CUs (two or more positive integers including 2, 4, 8, 16, etc.).
- the horizontal and vertical sizes of the CUs created by splitting are either half of the horizontal and vertical sizes of the CU before splitting, or smaller than the horizontal and vertical sizes of the CU before splitting, depending on the number of splits.
- Can have The partitioned CU may be recursively divided into a plurality of CUs having reduced horizontal and vertical sizes in the same manner.
- the depth information may be information indicating the size of a CU and may be stored for each CU.
- the depth of the LCU may be 0, and the depth of the smallest coding unit (SCU) may be a predefined maximum depth.
- the LCU may be a coding unit having a maximum coding unit size as described above, and the SCU may be a coding unit having a minimum coding unit size.
- the division starts from the LCU 310, and the depth of the CU increases by one each time the division reduces the horizontal and vertical sizes of the CU.
- the CU that is not divided may have a size of 2N ⁇ 2N.
- a 2N ⁇ 2N sized CU may be divided into a plurality of CUs having an N ⁇ N size. The magnitude of N decreases in half for every 1 increase in depth.
- the horizontal and vertical sizes of the divided four coding units may each have a size of half compared to the horizontal and vertical sizes of the coding unit before being split. have.
- the four divided coding units may each have a size of 16x16.
- the coding unit is divided into quad-tree shapes.
- the horizontal or vertical size of the divided two coding units may have a half size compared to the horizontal or vertical size of the coding unit before splitting.
- the two split coding units may have a size of 16x32.
- the two divided coding units may each have a size of 32x16.
- an LCU having a depth of 0 may be 64 ⁇ 64 pixels. 0 may be the minimum depth.
- An SCU of depth 3 may be 8x8 pixels. 3 may be the maximum depth.
- a CU of 64x64 pixels, which is an LCU may be represented by a depth of zero.
- a CU of 32x32 pixels may be represented by depth one.
- a CU of 16 ⁇ 16 pixels may be represented by depth two.
- a CU of 8x8 pixels, which is an SCU, may be represented by depth 3.
- information on whether the CU is split may be expressed through split information of the CU.
- the split information may be 1 bit of information. All CUs except the SCU may include partition information. For example, if the value of the partition information is 0, the CU may not be split. If the value of the partition information is 1, the CU may be split.
- FIG. 4 is a diagram illustrating a form of a prediction unit PU that may be included in the coding unit CU.
- a CU that is no longer split among CUs partitioned from the LCU may be divided into one or more prediction units (PUs). This process may also be called division.
- PUs prediction units
- the PU may be a basic unit for prediction.
- the PU may be encoded and decoded in any one of a skip mode, an inter screen mode, and an intra screen mode.
- the PU may be divided into various forms according to modes.
- the coding unit may not be divided into prediction units, and the coding unit and the prediction unit may have the same size.
- the skip mode there may be no partition in the CU.
- the 2N ⁇ 2N mode 410 having the same size as the CU without splitting may be supported.
- inter-screen mode eight divided forms in the CU can be supported.
- 2Nx2N mode 410, 2NxN mode 415, Nx2N mode 420, NxN mode 425, 2NxnU mode 430, 2NxnD mode 435, nLx2N mode 440, and nRx2N mode 445 may be supported.
- 2Nx2N mode 410 and NxN mode 425 may be supported.
- One coding unit may be split into one or more prediction units, and one prediction unit may also be split into one or more prediction units.
- the horizontal and vertical sizes of the divided four prediction units may each have a size of half compared to the horizontal and vertical sizes of the prediction unit before splitting. have.
- the four divided prediction units may each have a size of 16x16.
- the horizontal or vertical size of the divided two prediction units may have a half size compared to the horizontal or vertical size of the prediction unit before splitting.
- the two divided prediction units may each have a size of 16x32.
- the two divided prediction units may each have a size of 32x16.
- FIG. 5 is a diagram illustrating a form of a transform unit (TU) that a coding unit CU may include.
- TU transform unit
- a transform unit may be a basic unit used for a process of transform, quantization, inverse transform, and inverse quantization in a CU.
- the TU may have a shape such as a square shape or a rectangle.
- the TU may be determined dependent on the size and / or shape of the CU.
- a CU that is no longer split into CUs may be split into one or more TUs.
- the partition structure of the TU may be a quad-tree structure.
- one CU 510 may be divided one or more times according to the quadtree structure. If a CU is split more than once, it can be said to be split recursively.
- one CU 510 may be configured with TUs of various sizes. Or, it may be divided into one or more TUs based on the number of vertical lines and / or horizontal lines dividing the CU.
- the CU may be divided into symmetrical TUs and may be divided into asymmetrical TUs.
- Information about the size / shape of the TU may be signaled for division into an asymmetric TU and may be derived from information about the size / shape of the CU.
- the coding unit may not be divided into a transform unit, and the coding unit and the transform unit may have the same size.
- One coding unit may be split into one or more transform units, and one transform unit may also be split into one or more transform units.
- the horizontal and vertical sizes of the divided four transform units may each have a size of half compared to the horizontal and vertical sizes of the transform unit before splitting. have.
- the divided four transform units may have a size of 16x16.
- the horizontal or vertical size of the divided two transform units may be half the size of the transform unit before the split.
- the two divided transform units may have a size of 16x32.
- the divided two transform units may each have a size of 32x16.
- the transform unit may be said to be divided into a binary-tree.
- the residual block may be transformed using at least one of a plurality of pre-defined transformation methods.
- Discrete Cosine Transform DCT
- DST Discrete Sine Transform
- KLT KLT
- Which transformation method is applied to transform the residual block may be determined using at least one of inter prediction mode information of the prediction unit, intra prediction mode information, and size / shape of the transform block, and in some cases, indicates a transformation method.
- the information may be signaled.
- FIG. 6 is a diagram for explaining an embodiment of an intra prediction process.
- the intra prediction mode may be a non-directional mode or a directional mode.
- the non-directional mode may be a DC mode or a planar mode
- the directional mode may be a prediction mode having a specific direction or angle, and the number may be one or more M.
- the directional mode may be expressed by at least one of a mode number, a mode value, a mode number, and a mode angle.
- the number of intra prediction modes may be one or more N including the non-directional and directional modes.
- the number of intra prediction modes may vary depending on the size of the block.
- the size of a block may be 67 pieces in case of 4x4 or 8x8, 35 pieces in case of 16x16, 19 pieces in case of 32x32, and 7 pieces in case of 64x64.
- the number of intra prediction modes may be fixed to N regardless of the size of the block. For example, it may be fixed to at least one of 35 or 67 regardless of the size of the block.
- the number of intra prediction modes may vary depending on the type of color component. For example, the number of prediction modes may vary depending on whether the color component is a luma signal or a chroma signal.
- Intra picture encoding and / or decoding may be performed using sample values or encoding parameters included in neighboring reconstructed blocks.
- a step of checking whether samples included in neighboring reconstructed blocks are available as reference samples of the encoding / decoding target block may be performed. If there are samples that are not available as reference samples of the block to be encoded / decoded, at least one or more of the samples included in the neighboring reconstructed blocks are used to copy and / or sample values to samples that are not available as reference samples. Interpolation may be used as a reference sample of a block to be encoded / decoded.
- a filter may be applied to at least one of a reference sample or a prediction sample based on at least one of an intra prediction mode and a size of an encoding / decoding target block.
- the encoding / decoding target block may mean a current block and may mean at least one of a coding block, a prediction block, and a transform block.
- the type of filter applied to the reference sample or the prediction sample may be different according to at least one or more of an intra prediction mode or a size / shape of the current block.
- the type of filter may vary depending on at least one of the number of filter taps, a filter coefficient value, or a filter strength.
- the non-directional planar mode In the intra prediction mode, the non-directional planar mode generates a predicted block of a target encoding / decoding block.
- the upper right reference sample of the current block may be generated as a weighted sum of the lower left reference samples of the current block.
- the non-directional DC mode may be generated as an average value of upper reference samples of the current block and left reference samples of the current block when generating the prediction block of the target coding / decoding block.
- one or more upper rows and one or more left columns adjacent to the reference sample in the encoding / decoding block may be filtered using reference sample values.
- the prediction block may be generated by using the upper right and / or lower left reference samples, and the directional modes may have different directions.
- Real interpolation may be performed to generate predictive sample values.
- the intra prediction mode of the current prediction block may be predicted from the intra prediction mode of the prediction block existing around the current prediction block.
- the current prediction is performed by using predetermined flag information.
- Information on the intra prediction modes of the block and the neighboring prediction block may be signaled. If the intra prediction modes of the current prediction block and the neighboring prediction block are different, entropy encoding may be performed to perform intra prediction of the encoding / decoding target block. Mode information can be encoded.
- FIG. 7 is a diagram for explaining an embodiment of an inter prediction process.
- the rectangle illustrated in FIG. 7 may represent an image (or a picture).
- arrows in FIG. 7 may indicate prediction directions. That is, the image may be encoded and / or decoded according to the prediction direction.
- Each picture may be classified into an I picture (Intra Picture), a P picture (U-predictive Picture), a B picture (Bi-predictive Picture), and the like.
- Each picture may be encoded and decoded according to an encoding type of each picture.
- the image to be encoded When the image to be encoded is an I picture, the image may be encoded in the picture with respect to the image itself without inter prediction.
- the image to be encoded When the image to be encoded is a P picture, the image may be encoded through inter prediction or motion compensation using the reference image only in the forward direction. If the image to be encoded is a B picture, it may be encoded through inter prediction or motion compensation using reference pictures in both forward and reverse directions, and inter prediction or motion using the reference picture in one of the forward and reverse directions. Can be coded through compensation.
- the encoder may perform inter prediction or motion compensation, and the decoder may perform motion compensation corresponding thereto.
- the pictures of the P picture and the B picture that are encoded and / or decoded using the reference picture may be regarded as a picture using inter prediction.
- Inter prediction or motion compensation may be performed using a reference picture and motion information.
- inter prediction may use the skip mode described above.
- the reference picture may be at least one of a previous picture of the current picture or a subsequent picture of the current picture.
- the inter prediction may perform prediction on a block of the current picture based on the reference picture.
- the reference picture may mean an image used for prediction of the block.
- an area in the reference picture may be specified by using a reference picture index (refIdx) indicating a reference picture, a motion vector to be described later, and the like.
- the inter prediction may select a reference picture corresponding to the current block within the reference picture and the reference picture, and generate a prediction block for the current block using the selected reference block.
- the current block may be a block targeted for current encoding or decoding among blocks of the current picture.
- the motion information may be derived during inter prediction by each of the encoding apparatus 100 and the decoding apparatus 200.
- the derived motion information may be used to perform inter prediction.
- the encoding apparatus 100 and the decoding apparatus 200 use encoding information and / or decoding efficiency by using motion information of a reconstructed neighboring block and / or motion information of a collocated block (col block).
- the call block may be a block corresponding to a spatial position of a block to be encoded / decoded in a collocated picture (col picture).
- the reconstructed neighboring block may be a block within the current picture and may be a block that is already reconstructed through encoding and / or decoding.
- the reconstruction block may be a neighboring block adjacent to the encoding / decoding object block and / or a block located at an outer corner of the encoding / decoding object block.
- the block located at the outer corner of the encoding / decoding target block is a block vertically adjacent to a neighboring block horizontally adjacent to the encoding / decoding target block or a block horizontally adjacent to a neighboring block vertically adjacent to the encoding / decoding target block. Can be.
- Each of the encoding apparatus 100 and the decoding apparatus 200 may determine a block existing at a position corresponding to a block to be encoded / decoded spatially within a call picture, and determines a predetermined relative position based on the determined block. Can be.
- the predefined relative position may be a position inside and / or outside of a block existing at a position corresponding to a block to be encoded / decoded spatially.
- each of the encoding apparatus 100 and the decoding apparatus 200 may derive a call block based on the determined predetermined relative position.
- the call picture may be one picture among at least one reference picture included in the reference picture list.
- the method of deriving the motion information may vary according to the prediction mode of the encoding / decoding target block.
- a prediction mode applied for inter prediction there may be an advanced motion vector prediction (AMVP) and a merge mode.
- AMVP advanced motion vector prediction
- the merge mode may be referred to as a motion merge mode.
- each of the encoding apparatus 100 and the decoding apparatus 200 uses a motion vector of the reconstructed neighboring block and / or a motion vector of the call block. create a motion vector candidate list.
- the motion vector of the reconstructed neighboring block and / or the motion vector of the call block may be used as a motion vector candidate.
- the motion vector of the call block may be referred to as a temporal motion vector candidate
- the motion vector of the reconstructed neighboring block may be referred to as a spatial motion vector candidate.
- the bitstream generated by the encoding apparatus 100 may include a motion vector candidate index. That is, the encoding apparatus 100 may generate a bitstream by entropy encoding a motion vector candidate index.
- the motion vector candidate index may indicate an optimal motion vector candidate selected from the motion vector candidates included in the motion vector candidate list.
- the motion vector candidate index may be signaled from the encoding apparatus 100 to the decoding apparatus 200 through the bitstream.
- the decoding apparatus 200 may entropy decode the motion vector candidate index from the bitstream, and select the motion vector candidate of the decoding target block from the motion vector candidates included in the motion vector candidate list using the entropy decoded motion vector candidate index. .
- the encoding apparatus 100 may calculate a motion vector difference (MVD) between the motion vector of the encoding target block and the motion vector candidate, and may entropy encode the MVD.
- the bitstream may include entropy coded MVD.
- the MVD may be signaled from the encoding apparatus 100 to the decoding apparatus 200 through the bitstream.
- the decoding apparatus 200 may entropy decode the received MVD from the bitstream.
- the decoding apparatus 200 may derive the motion vector of the decoding object block through the sum of the decoded MVD and the motion vector candidate.
- the bitstream may include a reference picture index and the like indicating a reference picture.
- the reference image index may be entropy encoded and signaled from the encoding apparatus 100 to the decoding apparatus 200 through a bitstream.
- the decoding apparatus 200 may predict the motion vector of the decoding object block using the motion information of the neighboring block, and may derive the motion vector of the decoding object block using the predicted motion vector and the motion vector difference.
- the decoding apparatus 200 may generate a prediction block for the decoding target block based on the derived motion vector and the reference image index information.
- the merge mode may mean merging of motions for a plurality of blocks.
- the merge mode may mean applying motion information of one block to other blocks.
- each of the encoding apparatus 100 and the decoding apparatus 200 may generate a merge candidate list using the motion information of the reconstructed neighboring block and / or the motion information of the call block.
- the motion information may include at least one of 1) a motion vector, 2) a reference picture index, and 3) an inter prediction prediction indicator.
- the prediction indicator may be unidirectional (L0 prediction, L1 prediction) or bidirectional.
- the merge mode may be applied in a CU unit or a PU unit.
- the encoding apparatus 100 may entropy-code predetermined information to generate a bitstream and then signal the decoding apparatus 200.
- the bitstream may include predefined information.
- the predefined information includes: 1) a merge flag, which is information indicating whether to perform a merge mode for each block partition, and 2) which one of neighboring blocks adjacent to an encoding target block is merged with. It may include a merge index that is information about the merge.
- the neighboring blocks of the encoding object block may include a left neighboring block of the encoding object block, an upper neighboring block of the encoding object block, and a temporal neighboring block of the encoding object block.
- the merge candidate list may represent a list in which motion information is stored.
- the merge candidate list may be generated before the merge mode is performed.
- the motion information stored in the merge candidate list includes motion information of neighboring blocks adjacent to the encoding / decoding target block, motion information of a block corresponding to the encoding / decoding target block in the reference image, and motion already existing in the merge candidate list. At least one or more of the new motion information and the zero merge candidate generated by the combination of the information.
- the motion information of the neighboring block adjacent to the encoding / decoding target block is a spatial merge candidate and the motion information of the block corresponding to the encoding / decoding target block in the reference image is a temporal merge candidate. It may be referred to as).
- the skip mode may be a mode in which motion information of a neighboring block is applied to an encoding / decoding target block as it is.
- the skip mode may be one of modes used for inter prediction.
- the encoding apparatus 100 may entropy-code information about which block motion information to use as the motion information of the block to be encoded and may signal the decoding apparatus 200 through the bitstream.
- the encoding apparatus 100 may not signal other information to the decoding apparatus 200.
- the other information may be syntax element information.
- the syntax element information may include at least one of motion vector difference information, a coding block flag, and a transform coefficient level.
- the residual signal generated after intra-picture or inter-screen prediction may be converted into a frequency domain through a conversion process as part of a quantization process.
- the first transform may be performed using various DCT and DST kernels, and these transform kernels may perform 1D transform on horizontal and / or vertical directions for the residual signal.
- the transformation may be performed by a separate transform, each performed, or the transformation may be performed by a 2D non-separable transform.
- the DCT and DST types used for the conversion may be adaptively used for 1D conversion of DCT-V, DCT-VIII, DST-I, and DST-VII in addition to DCT-II as shown in the following table.
- a transform set may be configured to derive the DCT or DST type used for the transform.
- the intra prediction mode of the current encoding / decoding target block in the encoder / decoder and the same Transforms and / or inverse transforms may be performed using the transforms included in the corresponding transform set.
- the transform set may not be entropy encoded / decoded but may be defined according to the same rules in the encoder / decoder.
- entropy encoding / decoding indicating which transform is used among transforms belonging to the corresponding transform set may be performed.
- encoding efficiency can be improved by encoding / decoding a residual signal using an optimal transform method.
- truncated Unary binarization may be used to entropy encode / decode information on which of three transforms belonging to one transform set.
- information indicating which transform among transforms belonging to a transform set is used for at least one of a vertical transform and a horizontal transform may be entropy encoded / decoded.
- the encoder may perform a secondary transform in order to increase energy concentration of transformed coefficients as shown in the example of FIG. 9.
- Secondary transforms may also perform split transforms that perform one-dimensional transforms respectively in the horizontal and / or vertical directions, or perform two-dimensional non-separated transforms, and used transform information is signaled or is present and surrounding. It may be implicitly derived from the encoder / decoder according to the encoding information.
- a transform set for a secondary transform may be defined, such as a primary transform, and the transform set may be defined according to the same rules in the encoder / decoder rather than entropy encoding / decoding.
- information indicating which transform is used among the transforms belonging to the corresponding transform set may be signaled and applied to at least one or more of the residual signals through intra-screen or inter-screen prediction.
- At least one of the number or type of transform candidates is different for each transform set, and at least one of the number or type of transform candidates is the position, size, partition type, prediction mode of a block (CU, PU, TU, etc.). may be variably determined in consideration of at least one of intra / inter mode or directionality / non-direction of the intra prediction mode.
- the second inverse transform may be performed according to whether the second inverse transform is performed, and the first inverse transform may be performed according to whether the first inverse transform is performed on the result of the second inverse transform.
- the above-described first-order transform and second-order transform may be applied to at least one or more signal components of luminance / chromatic components or according to an arbitrary coding block size / shape, and may be used or used in any coding block.
- An index indicating a / second order transform may be entropy encoded / decoded, or may be implicitly derived from the encoder / decoder according to at least one of current and peripheral encoding information.
- the residual signal generated after intra-picture or inter-screen prediction undergoes a quantization process, and then the quantized transform coefficients undergo an entropy encoding process.
- the image may be scanned in a diagonal, vertical, or horizontal direction based on at least one of an intra prediction mode or a minimum block size / shape.
- the entropy decoded quantized transform coefficients may be inverse scanned and arranged in a block form, and at least one of inverse quantization or inverse transform may be performed on the block.
- at least one of a diagonal scan, a horizontal scan, and a vertical scan may be performed as a reverse scanning method.
- the residual signal for the 8x8 block is three scanning order methods shown in FIG. 10 for four 4x4 subblocks after the first, second order transform and quantization.
- Entropy encoding may be performed while scanning the quantized transform coefficients according to at least one of the following. It is also possible to entropy decode while inversely scanning the quantized transform coefficients.
- the inverse scanned quantized transform coefficients become transform coefficients after inverse quantization, and at least one of a second order inverse transform or a first order inverse transform may be performed to generate a reconstructed residual signal.
- one block may be split as shown in FIG. 11 and an indicator corresponding to the split information may be signaled.
- the split information may be at least one of a split flag (split_flag), a quad / binary tree flag (QB_flag), a quadtree split flag (quadtree_flag), a binary tree split flag (binarytree_flag), and a binary tree split type flag (Btype_flag).
- split_flag is a flag indicating whether a block is divided
- QB_flag is a flag indicating whether a block is divided into quadtrees or binary trees
- quadtree_flag is a flag indicating whether a block is divided into quadtrees
- binarytree_flag may be a flag indicating whether a block is divided into a binary tree form
- Btype_flag may be a flag indicating a vertical or horizontal division when the block is divided into a binary tree form.
- the division flag may be 0, indicating that the partition is not divided.
- the quad / binary tree flag 0 may indicate quadtree division, and 1, binary tree division. This may indicate quadtree splitting.
- the binary tree partition type flag 0 indicates horizontal division, 1 indicates vertical division, and 0 indicates vertical division, and 1 indicates horizontal division.
- the split information of FIG. 11 may be derived by signaling at least one of quadtree_flag, binarytree_flag, and Btype_flag as shown in Table 3 below.
- the split information of FIG. 11 may be derived by signaling at least one of split_flag, QB_flag, and Btype_flag as shown in Table 4 below.
- the splitting method may be split only into quadtrees or split only into binary trees depending on the size / shape of the block.
- the split_flag may mean a flag indicating whether quadtree or binary tree is split.
- the size / shape of the block may be derived according to the depth information of the block, and the depth information may be signaled.
- the block When the size of the block falls within a predetermined range, the block may be divided into quadtrees only.
- the predetermined range may be defined as at least one of the maximum block size or the minimum block size that can be divided only by the quadtree.
- Information indicating the size of the maximum / minimum block for which the quadtree type division is allowed may be signaled through a bitstream, and the corresponding information may be signaled in units of at least one of a sequence, a picture parameter, or a slice (segment). have.
- the size of the maximum / minimum block may be a fixed size preset in the encoder / decoder. For example, when the size of the block corresponds to 256x256 to 64x64, the block may be divided into quadtrees only.
- the split_flag may be a flag indicating whether the quadtree is split.
- the predetermined range may be defined as at least one of the maximum block size or the minimum block size that can be divided only by the binary tree.
- the information indicating the size of the maximum / minimum block that allows the division of the binary tree type may be signaled through a bitstream, and the corresponding information may be signaled in units of at least one of a sequence, a picture parameter, or a slice (segment). have.
- the size of the maximum / minimum block may be a fixed size preset in the encoder / decoder. For example, when the size of the block corresponds to 16x16 to 8x8, it may be possible to divide only into a binary tree.
- the split_flag may be a flag indicating whether a binary tree is split.
- the partitioned block After the one block is partitioned into a binary tree, when the partitioned block is further partitioned, it may be partitioned only into a binary tree.
- the one or more indicators may not be signaled.
- the quadtree based splitting may be possible.
- FIG. 12 is a diagram for describing a method of performing intra prediction on a current block according to an embodiment of the present invention.
- the intra prediction may include an intra prediction mode derivation step S1210, a reference sample configuration step S1220, and / or an intra prediction prediction step S1230.
- the intra prediction mode of the neighboring block is used, the intra prediction mode of the current block is decoded (eg, entropy decoding) from the bitstream, or the intra prediction mode of the color component is determined. Or an intra prediction mode using a transform model may be used to derive an intra prediction mode of the current block.
- the reference sample configuring step S1220 may configure the reference sample by performing the reference sample selection step and / or the reference sample filtering step.
- the intra prediction of the current block may be performed using non-directional prediction, directional prediction, location information based prediction, inter-color prediction, and / or residual signal prediction.
- the intra prediction operation step S1230 may additionally perform filtering on the prediction sample.
- different directional predictions may be performed according to one or more sample units.
- one or more sample units may be a single sample, sample group, line, and / or subblock.
- a method of using an intra prediction mode of one or more neighboring blocks, a method of decoding an intra prediction mode of a current block from a bitstream, and encoding a neighboring block At least one of a method using a parameter and a method using an intra prediction mode between color components may be used.
- the neighboring block may be one or more blocks reconstructed before encoding / decoding of the current block.
- the neighboring block When the neighboring block is located outside the boundary of at least one predetermined unit among a picture, a slice, a tile, and a coding tree unit (CTU), or when the PCM mode or the inter prediction is applied, the neighboring block may not be determined to be available. have.
- the intra prediction mode corresponding to the unavailable neighboring block may be replaced with a DC mode, a planar mode, or a predetermined intra prediction mode.
- the size of the current block may be W x H.
- W and H are each a positive integer and can be the same or different.
- W and / or H may be, for example, at least one of 2, 4, 8, 16, 32, 64, 128, 256, 512.
- FIG. 13 is a diagram for describing a method of deriving an intra prediction mode of a current block from a neighboring block.
- a to k displayed in the neighboring block may mean an intra prediction mode or a mode number of the neighboring block.
- the position of the neighboring block used to derive the intra prediction mode of the current block may be a predefined fixed position.
- information about the position of the neighboring block may be derived through encoding / decoding.
- encoding / decoding may be used to mean entropy encoding and decoding.
- the predetermined mode of the neighboring block may be derived into the intra prediction mode of the current block.
- the intra prediction mode i of the neighboring block to which the (-1, 0) sample adjacent to the left of the (0, 0) sample of the current block belongs may be derived to the intra prediction mode of the current block.
- f the intra prediction mode of the neighboring block to which the (0, -1) sample adjacent to the (0, 0) sample of the current block belongs, may be derived as the intra prediction mode of the current block.
- the intra prediction mode of the neighboring block to which the (-1, -1) sample adjacent to the upper left of the (0, 0) sample of the current block belongs may be derived as the intra prediction mode of the current block.
- g an intra prediction mode of the neighboring block to which the (W-1, -1) sample adjacent to the (W-1, 0) sample of the current block belongs, may be derived as the intra prediction mode of the current block.
- k the intra prediction mode of the neighboring block to which the [W, -1] sample adjacent to the upper right end of the (W-1, 0) sample of the current block belongs, may be derived as the intra prediction mode of the current block.
- the intra prediction mode of the neighboring block to which the (1, H-1) sample adjacent to the left of the (0, H-1) sample of the current block belongs may be derived as the intra prediction mode of the current block.
- l the intra prediction mode of the neighboring block to which the (-1, H) sample adjacent to the lower left end of the (0, H-1) sample of the current block belongs, may be derived as the intra prediction mode of the current block.
- the intra prediction mode of the neighboring block at a predetermined position among the neighboring blocks may be derived into the intra prediction mode of the current block.
- the predetermined position may be encoded / decoded from the bitstream or derived based on encoding parameters.
- the predetermined position may be a block in which an intra prediction mode is e.
- one or more neighboring blocks of neighboring blocks of the current block may be selected.
- the selection may be performed based on information explicitly signaled via the bitstream. Alternatively, the selection may be performed according to preset criteria in the encoder and the decoder.
- the intra prediction mode of the current block may be derived from the intra prediction modes of the selected one or more neighboring blocks.
- the intra prediction mode of the current block may be derived using statistical values of the intra prediction modes of the selected neighboring blocks.
- the statistical value may include a minimum value, a maximum value, an average value, a weighted average value, a mode value, and / or a median value.
- i or f which is an intra prediction mode of the neighboring blocks to which the samples adjacent to the left and top of the (0, 0) sample of the current block belong, is derived from the mode with the smaller or larger mode number as the intra prediction mode of the current block. can do.
- the intra prediction modes of the selected neighboring blocks are b, f, g, i, and j
- the mode having the smallest number may be derived as the intra prediction mode of the current block.
- the intra prediction modes of the selected neighboring blocks are i, b, and f
- a mode having a number corresponding to the middle may be derived as the intra prediction mode of the current block.
- the most frequently occurring mode of the intra prediction modes of the adjacent neighboring blocks of the current block may be derived as the intra prediction mode of the current block.
- the intra prediction mode of the current block may be derived by combining the intra prediction modes of one or more neighboring blocks.
- the intra prediction mode may be expressed by at least one of a mode number, a mode value, and a mode angle.
- an average of one or more intra prediction modes of neighboring blocks may be derived to the intra prediction modes of the current block.
- the average of the two prediction modes in the screen may mean at least one of an intermediate number of two mode numbers, an intermediate value of two mode values, and an intermediate angle of two mode angles.
- the mode corresponding to the average of the mode values of i and f, the intra prediction modes of the neighboring blocks to which the adjacent and upper samples of (0, 0) samples of the current block belong is defined as the intra prediction mode of the current block.
- the intra prediction mode Pred_mode of the current block may be derived by at least one method of (1) to (3) below.
- the intra prediction mode of the current block may be derived to i.
- the intra prediction mode f of the neighboring block is the directional mode, the intra prediction mode of the current block may be derived to f.
- the intra prediction mode of the current block may be derived as a mode corresponding to an average of at least one or more of the mode values of b, f, g, i and j which are intra prediction modes of neighboring blocks.
- the intra prediction mode Pred_mode of the current block may be derived by at least one method of (1) to (4) below.
- a mode corresponding to an average of available intra prediction modes of adjacent neighboring blocks may be derived as the intra prediction mode of the current block. For example, if the left neighboring block of the current block is located outside the boundaries of the picture, tile, slice, and / or CTU, or is not available because it corresponds to at least one of the PCM mode or the inter-screen mode, the upper neighboring blocks are in the screen.
- a mode corresponding to the statistical values of the prediction modes (eg, f and g) may be derived as an intra prediction mode of the current block.
- a weighted average or weighted sum may be used as a statistical value of intra prediction modes of neighboring blocks.
- the weight may be given based on the direction of the intra prediction mode of the neighboring block.
- relatively large weighted modes may be predefined or signaled.
- the relatively weighted modes may be at least one of a vertical direction mode, a horizontal direction mode, and a non-directional mode. These modes may be given the same weight or different weights.
- the intra prediction mode Pred_mode of the current block may be derived as a weighted sum of the modes i and f using Equation 3 below.
- the mode f may be a mode in which a relatively large weight is assigned (eg, a vertical direction mode).
- the weight to be used for the weighted sum may be determined based on the size of the neighboring block. For example, when the size of the block adjacent to the top of the current block is larger than the size of the block adjacent to the left, a larger weight may be given to the intra prediction mode of the block adjacent to the top. Alternatively, a larger weight may be given to an intra prediction mode of a small neighboring block.
- the non-directional mode may be derived to the intra prediction mode of the current block.
- the intra prediction mode of the current block may be derived using the intra prediction mode of the neighboring blocks except for the non-directional mode.
- the intra prediction modes of the neighboring blocks are all non-directional modes, the intra prediction modes of the current block may be derived to at least one of the DC mode and the planar mode.
- the intra prediction mode of the current block may be derived using a Most Probable Mode (MPM) based on the intra prediction mode of the neighboring block.
- MPM Most Probable Mode
- one or more information about the intra prediction mode of the current block may be encoded / decoded.
- an MPM list may be constructed.
- the MPM list may include an intra prediction mode derived based on the intra prediction mode of the neighboring block.
- the MPM list may include N candidate modes. N is a positive integer and may vary depending on the size and / or shape of the current block. Alternatively, information about N may be signaled through the bitstream.
- the intra prediction mode of the current block derived using the intra prediction mode of the one or more neighboring blocks may be a candidate mode included in the MPM list.
- Intra prediction modes of the neighboring block of the sample position may be used.
- the MPM list may be configured in the order of j, g, planar, DC, l, k, and b.
- the MPM list may be configured in the order of i, f, Planar, DC, l, k, and b.
- the overlapping mode may be included only once in the MPM list. If there are overlapping modes and the MPM list is not all filled, additional candidate modes may be included in the list based on the modes included in the list.
- a mode corresponding to + N or -N (N is a positive integer, for example, 1) of the modes included in the list may be added to the list.
- at least one mode not included in the list among the horizontal mode, the vertical mode, the 45 degree mode, the 135 degree mode, and the 225 degree mode may be added to the list.
- the MPM list may be constructed using a combination of one or more intra prediction modes and / or statistical values of neighboring blocks.
- MPM list 1 There may be a plurality of MPM lists, and the method of configuring each MPM list may be different. For example, three MPM lists (MPM list 1, MPM list 2 and MPM list 3) may be constructed. In this case, the intra prediction modes included in each MPM list may not overlap.
- An indicator (eg, prev_intra_luma_pred_flag) indicating whether the same mode as the intra prediction mode of the current block exists in the derived MPM list may be encoded in the bitstream or decoded from the bitstream.
- index information (eg, mpm_idx) indicating which mode among the modes included in the MPM list is encoded in the bitstream or the bitstream. Can be decrypted from.
- An intra prediction mode of the current block may be derived based on the decoded index information.
- intra prediction modes not included in the MPM list may be arranged in at least one of ascending and descending order.
- one or more groups may be configured by selecting one or more of intra prediction modes not included in the MPM list.
- one group may be configured using a mode corresponding to + N or -N (N is a positive integer, for example, 1, 2, or 3) of the intra prediction mode included in the MPM list.
- the group may be configured as an on-screen mode corresponding to a predetermined number (eg, 8 and 16), and the mode included in the group may be a mode not included in the MPM list.
- the indicator may indicate whether the same mode as the intra prediction mode of the current block exists in MPM list 1.
- the indicator indicates that the same mode does not exist in the MPM list 1, it may be determined whether the same mode exists in the MPM list 2.
- the mode may be derived as an intra prediction mode of the current block.
- the determination on the MPM list 3 may be performed. In this way, the determination of the plurality of MPM lists may be performed sequentially.
- the intra prediction mode of the block can be derived by using the MPM list indicated by the separate information and the indicator (for example, prev_intra_luma_pred_flag).
- a predetermined candidate of the derived MPM list may be derived to an intra prediction mode of the current block.
- the intra prediction mode of the current block may be derived to a mode corresponding to list 0 which is the first of the MPM list.
- the index corresponding to the predetermined mode in the list may be encoded / decoded to derive the corresponding mode into the intra prediction mode of the current block.
- one MPM list may be configured for a block having a predetermined size.
- each of the plurality of sub blocks may use the configured MPM list.
- an MPM list for the current block may be configured.
- each of the sub blocks may derive an intra prediction mode for each of the sub blocks using the configured MPM list. For example, if the current block is 8x8 and the subblocks are 4x44, after constructing the MPM list for the current block, each subblock may use the constructed MPM list.
- MPM lists for sub-blocks generated by dividing blocks of a predetermined size may be configured based on the blocks of the predetermined size, respectively.
- the MPM list for each subblock in the current block may be configured using the intra prediction mode of the neighboring block of the current block.
- the MPM list for each of the four subblocks may be configured using the intra prediction mode of the neighboring blocks of the current block. Therefore, the MPM lists for the four sub blocks can be configured at the same time.
- the intra prediction mode of the current block may be derived using at least one of the intra prediction mode of the current block derived from the MPM and the intra prediction mode of the neighboring block.
- the intra prediction mode of the current block derived using the MPM is Pred_mpm
- the intra prediction mode of the current block is changed by changing the Pred_mpm to a predetermined mode using one or more intra prediction modes of a neighboring block. Can be derived.
- Pred_mpm may be increased or decreased by N by comparing the size with the intra prediction mode of the neighboring block.
- N may be a predetermined integer such as +1, +2, +3, 0, -1, -2, -3, and the like.
- Pred_mpm may be increased if Pred_mpm is smaller than a statistical value of the intra prediction mode of the neighboring block and / or the intra prediction modes of the one or more neighboring blocks.
- Pred_mpm may be increased.
- Pred_mpm may be reduced. Or it may be derived based on the value compared to Pred_mpm and / or Pred_mpm.
- Pred_mpm + 1 when Pred_mpm is smaller than the mode value of f, Pred_mpm + 1 may be derived to the intra prediction mode of the current block.
- Pred_mpm + 1 when the Pred_mpm is smaller than the mode value of g, Pred_mpm + 1 may be derived to the intra prediction mode of the current block.
- Pred_mpm + 2 when Pred_mpm is smaller than the mode value of f, Pred_mpm + 2 may be derived to the intra prediction mode of the current block.
- Pred_mpm-1 when the Pred_mpm is larger than the mode value of f, Pred_mpm-1 may be derived to the intra prediction mode of the current block.
- Pred_mpm + 1 when the Pred_mpm is smaller than the mode value of i, Pred_mpm + 1 may be derived to the intra prediction mode of the current block. Alternatively, when Pred_mpm is smaller than the average of f and i, Pred_mpm + 1 may be derived to the intra prediction mode of the current block. Alternatively, when the Pred_mpm is smaller than the average value of f and i, half of the difference between the Pred_mpm and the average value may be increased. For example, Pred_mpm + ⁇ ((f + i + 1) >> 1-Pred_mpm + 1) >> 1 ⁇ can be derived into the intra prediction mode of the current block.
- the non-directional mode is induced to the intra prediction mode of the current block or the directional mode is the intra prediction mode of the current block. Can be induced.
- the intra prediction mode of the current block may be deriving using a Most Probable Mode (MPM) list.
- MPM Most Probable Mode
- the intra prediction mode of the current block may be entropy encoded / decoded.
- information necessary for configuring an MPM list such as whether the MPM list of the current block is used, whether at least one or more MPM lists of upper blocks for the current block are used, and whether or not at least one or more MPM lists of adjacent blocks for the current block are used.
- a video parameter set VPS
- SPS sequence parameter set
- PPS picture parameter set
- APS adaptation parameter set
- a slice header a tile header, a CTU unit, a CU unit, a PU unit
- Entropy may be encoded / decoded through at least one of the TU units.
- the upper block may be a block having a depth value smaller than the depth value of the current block.
- the upper block may mean at least one or more of the blocks including the current block among the blocks having the small depth value.
- the depth value may mean a value that increases by 1 whenever the block is divided.
- a depth value of an unsegmented coding tree unit (CTU) may be zero.
- the upper block may mean a combination of at least one of the following embodiments or the following embodiments.
- the first block may include the second block.
- the first block may mean a block that is shallower than the second block.
- a shallow block may have the same meaning as a block having a small depth value.
- the first block may mean a block larger in size than the second block. In this case, the large block may be a shallow block.
- Information representing at least one of the size or depth of the first block may be signaled from an encoder.
- the information may be signaled at at least one of a VPS, an SPS, a picture, a slice, a tile, and a block level.
- At least one of the size or depth of the first block may be derived based on at least one of the size or depth of the second block.
- at least one of the size or depth of the first block may be derived based on a value added or subtracted from a size (or depth) value of the second block (current block).
- at least one of the size or depth of the first block may have a fixed value pre-committed in the encoder / decoder.
- the neighboring block may be at least one of blocks spatially and / or temporally adjacent to the current block.
- the neighboring blocks may be blocks that are already encoded / decoded.
- the adjacent block may have a depth (or size) value equal to or different from that of the current block.
- the adjacent block may mean a block at a predetermined position with respect to the current block.
- the predetermined position may be at least one of an upper left end, an upper end, an upper right end, a left side, and a lower left end based on the current block.
- the predetermined position may be a position in a picture different from the picture to which the current block belongs.
- the block in the predetermined position may mean at least one of a block located at the same position as the current block and / or a block adjacent to the same position in the other picture.
- the block at the predetermined position may be a block having the same prediction mode as the current block in a specific region in the other picture corresponding to the current block.
- the adjacent block may mean a combination of at least one of the following embodiments or the following embodiments.
- the first block may be an encoded / decoded block adjacent to the second block.
- the first block may be a block having the same depth as that of the second block.
- the first block may be a block having the same size as that of the second block.
- the first block and the second block may belong to the same coding block (CTU, CU, etc.) or may belong to different coding blocks.
- the depth and / or size of the first block may be different from the depth and / or size of the second block.
- the MPM list of the upper block or the neighboring block may mean an MPM list configured based on the upper block or the neighboring block.
- the intra prediction mode of the encoded / decoded block adjacent to the upper block or the neighboring block may be added to the MPM list of the upper block or the neighboring block.
- FIG. 14 is an exemplary diagram for describing a current block, an upper block, and an adjacent block.
- the block U may be an upper block of the blocks F, G, H, I, and J.
- at least one of the blocks F, G, H, I, and J may be the current block.
- the block V (bold dotted block) may be an upper block of the blocks G, H, I, and J.
- at least one of the blocks G, H, I, and J may be a current block.
- the block W may be an upper block of the blocks G, H, and I.
- at least one of the blocks G, H, and I may be a current block.
- block X (a diamond pattern block) may be an upper block of blocks H and I.
- at least one of the blocks H and I may be a current block.
- an adjacent block of the current block D may be at least one of B, C, and K.
- an adjacent block of the current block L may be at least one of C, D, E, H, and K.
- an adjacent block of the current block P may be at least one of E, H, I, J, L, N, and O.
- the neighboring block of the current block S in FIG. 14 may be at least one of I, J, P, Q, and R.
- the N MPM lists may be used to derive the intra prediction mode of the current block or entropy encode / decode the intra prediction mode of the current block.
- N may mean 0 or a positive integer. That is, the intra prediction mode of the current block may be derived using the plurality of MPM lists, or the entropy encoding / decoding of the intra prediction mode of the current block may be performed.
- the plurality of MPM lists may mean multiple MPM lists or multiple lists.
- the N MPM lists for the current block may include at least one of the MPM list of the current block, the MPM list of the upper block, and the MPM list of the neighboring block.
- the N MPM lists may be generated using at least one of encoding parameters of the current block.
- At least one of the sub blocks in a specific block may be the current block, and in this case, an upper block of the sub block may be the specific block.
- the sub block may be included in the specific block.
- the sub block may be a block divided from the specific block.
- at least one or more of the sub blocks that do not correspond to the current block among the sub blocks divided from the specific block may be adjacent blocks of the current block.
- the sub block may mean a lower block in a meaning opposite to that of the upper block.
- the plurality of MPM lists for the current block may be configured by at least one of the methods described below.
- the plurality of MPM lists may include at least one of an MPM list configured based on the current block and an MPM list configured based on the upper block of the current block.
- an MPM list configured based on the upper block X may be used for the current block H.
- an MPM list configured based on the upper block W may be used for the current block H.
- an MPM list configured based on the upper block V may be used for the current block H.
- an MPM list configured based on the upper block U may be used for the current block H.
- At least one or more of the MPM lists configured based on at least one or more of upper blocks X, W, V, and U may be used to derive an intra prediction mode of the current block H.
- the current block when the current block is H, the current block may be configured by at least one of the following methods for describing a plurality of MPM lists.
- the plurality of MPM lists may include at least one of an MPM list configured based on the current block and an MPM list configured based on the adjacent block of the current block.
- an MPM list configured based on the neighboring block E may be used for the current block H.
- an MPM list constructed based on the neighboring block G may be used for the current block H.
- At least one or more of the MPM lists configured based on at least one or more of the adjacent blocks E and G may be used for the current block H.
- the intra prediction mode of the current block may be derived using the constructed MPM list or may be entropy encoded / decoded.
- Using the MPM list of the higher block or the neighboring block for the current block H means that the MPM of the higher block or the neighboring block is used for deriving the intra prediction mode of the current block or encoding / decoding the intra prediction mode of the current block. This may mean that lists are used.
- the plurality of MPM lists for the current block may include MPM lists for N upper blocks.
- N may be 0 or a positive integer.
- information such as the number N of the upper blocks included, the depth value, the range of the depth value, and / or the difference between the depth value of the current block and the upper block may be necessary to form the MPM list of the upper block.
- Information necessary for constructing the MPM list of the upper block includes: video parameter set (VPS), sequence parameter set (SPS), picture parameter set (PPS), adaptation parameter set (APS), slice header, tile Entropy encoding / decoding may be performed in at least one of a header, a CTU unit, a CU unit, a PU unit, and a TU unit.
- the MPM list of the upper block may be configured using at least one or more of the methods described below.
- the configured MPM list of the upper block may be used for deriving the intra prediction mode of the current block or entropy encoding / decoding of the intra prediction mode of the current block.
- D may be 0 or a positive integer.
- the MPM list of the upper block having a depth value of D-1 may be used for the current block.
- the MPM list of the upper block having a depth value of D-2 may be used for the current block.
- an MPM list of higher blocks having a depth value of D-K may be used for the current block.
- K may be a positive integer less than or equal to D.
- an MPM list of upper blocks having depth values from D-1 to D-2 may be used for the current block.
- an MPM list of upper blocks having depth values from D-1 to D-3 may be used for the current block.
- an MPM list of upper blocks having depth values from D-1 to D-K may be used for the current block.
- K may be a positive integer less than or equal to D.
- an MPM list of higher blocks having a depth value from D-K to D-l may be used for the current block.
- K and l may be a positive integer less than or equal to D.
- K may also be less than l.
- an MPM list of upper blocks having a depth value of D-1 or 0 may be used for the current block.
- an MPM list of at least two upper blocks among upper blocks having a depth-returned value of 0, 1, D-1 or D-2 may be used for the current block.
- an MPM list of at least K upper blocks among upper blocks having a depth value of D-1 to DK and a depth value of 0 to K-1 may be used for the current block.
- K may be a positive integer less than or equal to D.
- an MPM list of K upper blocks may be used based on the current block.
- K may be a positive integer less than or equal to D.
- the number and / or depth value of the upper block used may be derived using the size and / or depth information of the current block.
- the size of the current block may be represented by the number of WxH pixels.
- an MPM list of at least one or more upper blocks among upper blocks having a depth value from D-1 to D-K may be used for the current block.
- K may be a positive integer less than D.
- an MPM list of at least one or more higher blocks among upper blocks having depth values from D-1 to DL may be used for the current block.
- L may be a positive integer greater than K.
- the MPM list of at least one or more higher blocks among upper blocks having a depth value from D-1 to DK is obtained. Available for the current block.
- K may be a positive integer less than D.
- an MPM list of at least one or more upper blocks among upper blocks having depth values from D-1 to D-L may be used for the current block.
- L may be a positive integer greater than K.
- the plurality of MPM lists for the current block may include MPM lists for N adjacent blocks.
- the N adjacent blocks may include adjacent blocks of a predetermined position. N may be zero or a positive integer.
- Information necessary for constructing the MPM list of the adjacent block includes: video parameter set (VPS), sequence parameter set (SPS), picture parameter set (PPS), adaptation parameter set (APS), slice header, tile Entropy encoding / decoding may be performed in at least one of a header, a CTU unit, a CU unit, a PU unit, and a TU unit.
- the number and / or location of adjacent blocks may be variably determined according to the size, shape and / or location of the current block.
- the MPM list of the neighboring blocks may be constructed when the depth value of the neighboring block is a preset value or falls within a predetermined range.
- the predetermined range may be defined as at least one of a minimum value and a maximum value.
- Information regarding at least one of the minimum value and the maximum value may be entropy encoded / decoded in the above-described predetermined unit.
- the plurality of MPM lists for the current block may be configured by at least one of the methods described below.
- the plurality of MPM lists may include at least one of an MPM list configured based on the current block and an MPM list configured based on the adjacent block of the current block.
- an MPM list configured based on the left neighboring block L or N of the current block may be used for the current block P.
- an MPM list configured based on the upper left neighboring block E of the current block may be used for the current block P.
- the MPM list configured based on the lower left adjacent block O of the current block may be used for the current block P.
- an MPM list configured based on the upper neighboring block H or I of the current block may be used for the current block P.
- an MPM list configured based on the upper right neighboring block J of the current block may be used for the current block P.
- At least two MPM lists of the upper left, upper, upper right, left, and lower left adjacent blocks of the current block may be used for the current block P.
- At least three MPM lists among the upper left, upper, upper right, left, and lower left adjacent blocks of the current block may be used for the current block P.
- At least four MPM lists of the upper left, upper, upper right, left, and lower left adjacent blocks of the current block may be used for the current block P.
- At least five MPM lists among the upper left, upper, upper right, left, and lower left adjacent blocks of the current block may be used for the current block P.
- the intra prediction mode derived based on at least one of the current block, the upper block, and the adjacent block may be included in one MPM list for the current block. That is, when the current block does not use a plurality of MPM lists and uses one MPM list, at least one of intra prediction modes derived based on at least one of the current block, the higher block, and the adjacent block is used. MPM list can be constructed.
- the order of configuring the N MPM lists may be determined.
- N may be 0 or a positive integer.
- the order of constructing the MPM list may be a predetermined order in the encoder and the decoder. Alternatively, the order of constructing the MPM list may be determined based on encoding parameters of respective corresponding blocks. Alternatively, the order of constructing the MPM list may be determined based on an encoding parameter of the current block. Alternatively, the information about the order of configuring the MPM list may be entropy encoded / decoded.
- the current block is H and the MPM list of the current block may be referred to as MPM_LIST_CUR.
- MPM lists of X, W, V, and U configured based on upper blocks of the current block may be referred to as MPM_LIST_X, MPM_LIST_W, MPM_LIST_V, and MPM_LIST_U, respectively.
- MPM lists of L, E, and G configured based on adjacent blocks of the current block may be referred to as MPM_LIST_L, MPM_LIST_E, and MPM_LIST_G, respectively.
- the order of constructing the N MPM lists for the current block may be determined by at least one or more of the methods described below.
- the number of upper blocks and / or adjacent blocks used in the method described below is just an example, and other numbers of blocks may be used.
- a plurality of MPM lists for the current block H may be configured in the order of MPM_LIST_CUR-> MPM_LIST_X-> MPM_LIST_W-> MPM_LIST_V-> MPM_LIST_U.
- a plurality of MPM lists for the current block H may be configured in the order of MPM_LIST_U-> MPM_LIST_V-> MPM_LIST_W-> MPM_LIST_X-> MPM_LIST_CUR.
- a plurality of MPM lists for the current block H can be constructed by using MPM_LIST_CUR as the first MPM list, and using the MPM list of at least K higher blocks sorted in ascending or descending order based on the depth value.
- K may be zero or a positive integer.
- a plurality of MPM lists for the current block H may be configured in the order of MPM_LIST_CUR-> MPM_LIST_L-> MPM_LIST_G-> MPM_LIST_E.
- a plurality of MPM lists for the current block H may be configured in the order of MPM_LIST_L-> MPM_LIST_G-> MPM_LIST_E-> MPM_LIST_CUR.
- a plurality of MPM lists for the current block H are used by using MPM_LIST_CUR as the first MPM list, and using MPM lists of at least one adjacent block among at least one of upper left, left, lower left, upper, and upper right in a predetermined order. Can be configured.
- a plurality of MPM lists for the current block H may be configured in the order of MPM_LIST_CUR-> MPM_LIST_X-> MPM_LIST_L.
- a plurality of MPM lists for the current block H may be configured in the order of MPM_LIST_CUR-> MPM_LIST_L-> MPM_LIST_X.
- a plurality of MPM lists for the current block H may be configured in the order of MPM_LIST_CUR-> higher block K MPM lists in a predetermined order-> adjacent block L MPM lists in a predetermined order.
- K and L may be 0 or a positive integer.
- a plurality of MPM lists for the current block H may be configured in order of MPM_LIST_CUR-> neighboring block L MPM lists in a predetermined order-> higher block K MPM lists in a predetermined order.
- K and L may be 0 or a positive integer.
- a plurality of MPM lists for the current block H may be configured in order of at least K MPM lists among upper blocks and adjacent blocks according to MPM_LIST_CUR-> predetermined order.
- K may be a positive integer.
- a plurality of MPM lists for the current block H may be configured with MPM_LIST_CUR and at least K MPM lists among upper blocks and adjacent blocks in a predetermined order.
- K may be a positive integer.
- the late order MPM list may not include the intra prediction mode included in the fast order MPM list.
- variable length code of an indicator for the faster order MPM list may be shorter than a variable length code of the indicator for the late order MPM list.
- the faster MPM list may include fewer candidates than the late MPM list.
- an indicator for the MPM list may be allocated according to the order of the configured MPM list.
- the N MPM lists for the current block may include at least one MPM list of upper blocks and adjacent blocks.
- the plurality of MPM lists may be configured not to include intra prediction modes overlapping each other.
- N may be 0 or a positive integer.
- the N MPM lists used for the current block may be expressed as MPM_LIST_1, MPM_LIST_2, ... MPM_LIST_N.
- At least one of the MPM_LIST_CUR, MPM_LIST_X, MPM_LIST_W, MPM_LIST_V, MPM_LIST_U, MPM_LIST_L, MPM_LIST_E, and MPM_LIST_G may correspond to at least one of MPM_LIST_1, MPM_LIST_2, ... MPM_LIST_N.
- each MPM list may include may be represented by C1, C2, ... CN.
- N, C1, C2, ..., CN may be zero or a positive integer. Some or all of the C1 to CN may be the same value or different values.
- at least one of C1, C2, ... CN may be a predetermined value in the encoder and the decoder.
- at least one of C1, C2, ... CN may be determined based on an encoding parameter of each corresponding block.
- at least one of C1, C2, ... CN may be entropy encoded / decoded.
- intra prediction modes included in the MPM_LIST_1 list may be expressed as MPM_LIST_1_MODE_1, MPM_LIST_1_MODE_2, ..., MPM_LIST_1_MODE_C1.
- the intra prediction mode included in the late order MPM list can be used to confirm the redundancy with the intra prediction modes included in the fast order MPM list. have. If there are overlapping intra prediction modes after checking redundancy, the intra prediction modes may be excluded from the MPM list. In addition, after the overlapping modes are excluded, a predetermined intra prediction mode may be added to the corresponding MPM list.
- the redundancy check for the modes included in the MPM lists may be performed in constructing a plurality of MPM lists. Alternatively, the redundancy check may be performed after configuring all the plurality of MPM lists used. Alternatively, the redundancy check may be performed whenever the intra prediction mode is included in the MPM list.
- the intra prediction modes of the MPM_LIST_1 may be MPM_LIST_1_MODE_1, MPM_LIST_1_MODE_2, ..., MPM_LIST_1_MODE_C1 which do not overlap each other.
- the MPM_LIST_2 when the MPM_LIST_2 includes C2 intra prediction modes that do not overlap each other, it may be checked whether the intra prediction modes included in the MPM_LIST_2 overlap with at least one of the intra prediction modes included in the MPM_LIST_1.
- MPM_LIST_2_MODE_X included in the MPM_LIST_2 overlaps with the mode included in the MPM_LIST_1
- the overlapping intra prediction mode MPM_LIST_2_MODE_X may be excluded from the MPM_LIST_2.
- MPM_LIST_2_MODE_X may be at least one of MPM_LIST_2_MODE_1, MPM_LIST_2_MODE_2, ..., MPM_LIST_2_MODE_C2.
- At least one intra prediction mode when at least one intra prediction mode is excluded from the MPM_LIST_2, at least one of predetermined intra prediction modes may be included in the MPM_LIST_2.
- at least one of the predetermined intra prediction modes included in MPM_LIST_2 may not overlap with at least one of the intra prediction modes included in MPM_LIST_1.
- at least one of the predetermined intra prediction modes included in MPM_LIST_2 may not overlap with all of the intra prediction modes included in MPM_LIST_1.
- Predetermined intra prediction modes added to supplement the overlapping intra prediction modes are, for example, INTRA_PLANAR, INTRA_DC, horizontal mode, vertical mode, 45 degree mode, 135 degree mode, 225 degree mode MPM_LIST_2_MODE_X ⁇ delta, INTRA_DM, It may include at least one or more of intra prediction modes including INTRA_LM.
- INTRA_DM may mean an intra prediction mode that determines the intra prediction mode of the chrominance screen to be identical to the intra prediction mode.
- INTRA_LM may refer to an intra prediction mode that generates at least one of the chrominance prediction / residual / recovery blocks based on at least one of the luminance prediction / residual / recovery blocks.
- delta may be a positive integer.
- the predetermined intra prediction mode MPM_LIST_2_MODE_X ⁇ delta may be included in the MPM_LIST_2 while continuously increasing the delta value from 1 to 1 until the number of intra prediction modes included in the MPM_LIST_2 is C2.
- the predetermined intra prediction modes are arranged in a predetermined order, and at least one or more of the intra intra prediction modes are assigned to the MPM_LIST_2 in this order until the number of intra prediction modes included in the MPM_LIST_2 is C2. Can be included.
- each intra picture prediction mode included in the MPM_LIST_3 overlaps with at least one of the intra picture prediction modes included in the MPM_LIST_1 and the MPM_LIST_2.
- MPM_LIST_3_MODE_X When the intra prediction mode MPM_LIST_3_MODE_X included in the MPM_LIST_3 overlaps with the mode included in the MPM_LIST_1 or the MPM_LIST_2, the overlapping intra prediction mode MPM_LIST_3_MODE_X may be excluded from the MPM_LIST_3.
- MPM_LIST_3_MODE_X may be at least one of MPM_LIST_3_MODE_1, MPM_LIST_3_MODE_2, ..., MPM_LIST_3_MODE_C3.
- At least one intra prediction mode when at least one intra prediction mode is excluded from the MPM_LIST_3, at least one of predetermined intra prediction modes may be included in the MPM_LIST_3.
- at least one of the predetermined intra prediction modes included in the MPM_LIST_3 may not overlap with at least one of the intra prediction modes included in the MPM_LIST_1 and the MPM_LIST_2.
- at least one of the predetermined intra prediction modes included in MPM_LIST_3 may not overlap with all of the intra prediction modes included in MPM_LIST_1 and MPM_LIST_2.
- the predetermined intra prediction mode MPM_LIST_3_MODE_X ⁇ delta may be included in the MPM_LIST_3 while the delta value is continuously increased from 1 to 1 until the number of intra prediction modes included in the MPM_LIST_3 is C3.
- the predetermined intra prediction modes are arranged in a predetermined order, and at least one or more of the intra prediction modes in the order are assigned to the MPM_LIST_3 until the number of intra prediction modes included in the MPM_LIST_3 is C3. Can be included.
- the MPM_LIST_K of the current block includes CK intra-picture prediction modes that do not overlap each other
- the intra-prediction modes included in the MPM_LIST_K are in-screen of MPM_LIST_1, MPM_LIST_2, ... MPM_LIST_ (K-1). It may be checked whether the data overlaps with at least one of the prediction modes.
- K may be a positive integer less than or equal to N, the maximum number of MPM lists that the current block may have.
- MPM_LIST_K_MODE_X included in MPM_LIST_K overlaps with the mode included in at least one of MPM_LIST_1, MPM_LIST_2, ... MPM_LIST_ (K-1)
- the corresponding in-picture prediction mode MPM_LIST_K_MODE_X is excluded from MPM_LIST_K.
- MPM_LIST_K_MODE_X may be at least one of MPM_LIST_K_MODE_1, MPM_LIST_K_MODE_2, ..., MPM_LIST_K_MODE_CK.
- At least one intra prediction mode when at least one intra prediction mode is excluded from the MPM_LIST_K, at least one of predetermined intra prediction modes may be included in the MPM_LIST_K.
- at least one of the predetermined intra prediction modes included in MPM_LIST_K may not overlap with at least one of the intra prediction modes included in MPM_LIST_1, MPM_LIST_2, ..., and MPM_LIST_ (K-1). have.
- at least one of the predetermined intra prediction modes included in MPM_LIST_K may not overlap with all intra prediction modes included in MPM_LIST_1, MPM_LIST_2, ..., and MPM_LIST_ (K-1).
- the intra prediction included in MPM_LIST_1, MPM_LIST_2, ..., and MPM_LIST_ (K-1) for at least one or more of the predetermined intra prediction modes. If there is a predetermined intra prediction mode that does not overlap at least one or all of the modes, the predetermined intra prediction mode may be added as the intra prediction mode of MPM_LIST_K.
- the predetermined intra prediction mode MPM_LIST_K_MODE_X ⁇ delta may be included in the MPM_LIST_K, while the delta value is continuously increased from 1 to 1 until the number of intra prediction modes included in the MPM_LIST_K becomes CK.
- the predetermined intra prediction modes are arranged in a predetermined order, and at least one or more of the intra prediction modes in the order are assigned to the MPM_LIST_K until the number of intra prediction modes included in the MPM_LIST_K becomes CK. Can be included.
- the N MPM list is used to derive the intra prediction mode of the current block or entropy encode / decode the intra prediction mode of the current block.
- An indicator (MPM flag) indicating whether the same intra prediction mode as the intra prediction mode of the current block exists may be entropy encoded / decoded for each of the N MPM lists.
- N indicators may be encoded / decoded, such as MPM_FLAG_1, MPM_FLAG_2, ... MPM_FLAG_N, for each MPM list.
- at most (N-1) indicators may be encoded / decoded, in which case, the indicator for one MPM list in which the indicator is not encoded / decoded may be the value of some or all of the (N-1) indicators.
- the indicator may not be encoded / decoded for any of the N MPM lists (eg, the last MPM list in a predetermined order).
- the indicator for the specific MPM list may have a first value, and the second mode when the same mode does not exist. It can have a value.
- the first value may be 1 and the second value may be 0. That is, the indicator may be flag information.
- all of the indicators for the other MPM lists except for the indicator for the specific MPM list may have a second value.
- the indicators for the K + 1-th MPM list to the N-th MPM list may not be entropy encoded / decoded.
- K may be a positive integer greater than or equal to 1 and less than or equal to N.
- Entropy encoding may be applied to index information (MPM index) for.
- the index information may be entropy decoded to identify an intra prediction mode that is identical to an intra prediction mode of the current block among intra prediction modes included in a specific MPM list.
- the index information may be entropy encoded / decoded by a fixed length code or a variable length code.
- the index information may be used to derive an intra prediction mode of the current block.
- the encoder determines the remaining intra prediction mode of the current block. Entropy can be coded.
- the residual intra prediction mode may be used to identify the intra prediction mode of the current block that is not included in at least one of the MPM lists.
- the residual intra prediction mode may be used to identify the intra prediction mode of the current block that is not included in all candidate intra prediction modes of the MPM lists.
- the total number of intra prediction modes is Y
- the sum of the number of all intra prediction modes included in the N MPM lists for the current block is X
- Y X intra predictions minus X is obtained.
- entropy encoding may be performed on the remaining intra prediction mode indicating the same intra prediction mode as the intra prediction mode of the current block.
- the total X intra prediction modes included in the N MPM lists may be arranged based on at least one or more of the size, angle, order, and identification number of the intra prediction modes.
- the sorting can be ascending sorting or descending sorting.
- the aligned X intra prediction modes may be compared with the intra prediction modes of the current block. As a result of the comparison, when the intra prediction mode of the current block is larger, a specific value may be subtracted from the intra prediction mode value of the current block.
- the specific value may be 1.
- the mode having the largest reference value of the sorted X intra prediction modes eg, at least one of the size, angle, order, and identification number of the intra prediction mode
- the modes can be compared. As a result of the comparison, when the intra prediction mode value of the current block is larger, a specific value may be subtracted from the intra prediction mode value of the current block.
- the mode having the second largest reference value among the sorted X intra prediction modes may be compared with the intra prediction mode of the current block subtracted by the specific value. As a result of the comparison, when the intra prediction mode of the subtracted current block is larger, the specific value may be further subtracted from the sub intra prediction mode value of the current block.
- Subtraction based on the comparison may be repeated until the mode having the smallest reference value among the sorted X intra prediction modes.
- the intra prediction mode value of the subtracted current block may be entropy encoded into the residual intra prediction mode.
- the intra intra prediction mode of the current block may be entropy decoded and used to identify the intra intra prediction mode that is the same as the intra prediction mode of the current block among intra prediction modes not included in the N MPM lists.
- the number of intra prediction modes is excluded from Y by X. It is possible to entropy decode a residual intra prediction mode indicating the same intra prediction mode as the intra prediction mode of the current block among the YX intra prediction modes.
- the X intra prediction modes may be aligned based on at least one or more of the size, angle, order, and identification number of the intra prediction mode.
- the sorting can be ascending sorting or descending sorting.
- the entropy decoded residual intra prediction mode may be compared with the X intra prediction modes. As a result of the comparison, when the entropy decoded residual picture prediction mode value is greater than or equal to, the entropy decoded residual picture prediction mode value may be increased to a specific value.
- the specific value may be 1.
- the mode having the smallest reference value of the sorted X intra prediction modes eg, at least one of the size, angle, order, and identification number of the intra prediction mode
- the modes can be compared.
- a value of the prediction mode in the residual picture is greater than or equal to a value, a specific value may be added to the prediction mode value in the remaining picture.
- the mode having the second smallest reference value among the sorted X intra prediction modes may be compared with the residual intra prediction mode added to the specific value.
- the specific value may be additionally added from the added residual prediction mode value.
- the addition based on the comparison may be repeated until the mode having the largest reference value among the sorted X intra prediction modes. Finally, the added residual intra prediction mode value may be entropy decoded into the intra prediction mode of the current block.
- a method of entropy encoding / decoding an intra prediction mode of a current block using the N MPM lists may be performed as described below.
- the encoder determines whether the same intra prediction mode as the intra prediction mode of the current block exists in the MPM_LIST_1. Entropy encoding may be performed using the indicator MPM_FLAG_1 indicating whether the first value is the first value. When MPM_FLAG_1 is the first value, the index information MPM_IDX_1 may be additionally entropy encoded.
- the encoder does not have an intra prediction mode that is identical to the intra prediction mode of the current block among the intra prediction modes included in the MPM_LIST_1, the encoder is configured to have the same intra prediction mode as the intra prediction mode of the current block in the MPM_LIST_1.
- An indicator MPM_FLAG_1 indicating whether there is an entropy may be encoded with a second value. When MPM_FLAG_1 is the second value, the remaining intra prediction mode REM_MODE may be additionally entropy encoded.
- the decoder may entropy decode the indicator MPM_FLAG_1 indicating whether the same intra prediction mode as the intra prediction mode of the current block exists in MPM_LIST_1.
- MPM_FLAG_1 is the first value
- the index information MPM_IDX_1 may be additionally entropy decoded to derive an intra prediction mode of the current block.
- the remaining intra prediction mode REM_MODE may be additionally entropy decoded to derive the intra prediction mode of the current block.
- the same intra prediction mode as the intra prediction mode of the current block is one of the MPM_LIST_1 and the MPM_LIST_2. It is possible to entropy encode the indicators MPM_FLAG_1 and MPM_FLAG_2 indicating which MPM lists exist.
- MPM_FLAG_1 may be a first value
- MPM_FLAG_2 may be a second value.
- MPM_IDX_1 which is index information of the MPM_LIST_1, may be additionally entropy encoded.
- MPM_FLAG_1 when the intra prediction mode of the current block exists in MPM_LIST_2, MPM_FLAG_1 may be the second value and MPM_FLAG_2 may be the first value.
- MPM_IDX_2, which is index information of the MPM_LIST_2, may be additionally entropy encoded.
- the encoder may have the same intra prediction modes as the MPM_LIST_1 and the intra prediction modes of the current block.
- Entropy encoding may be performed using the indicators MPM_FLAG_1 and MPM_FLAG_2 indicating whether any MPM list in the MPM_LIST_2 is present as a second value.
- MPM_FLAG_1 and MPM_FLAG_2 are the second values
- REM_MODE which is the prediction mode in the residual picture, may be additionally entropy encoded.
- the decoder may entropy decode the indicators MPM_FLAG_1 and MPM_FLAG_2 indicating whether the same intra prediction mode as the intra prediction mode of the current block exists in the MPM list of the MPM_LIST_1 and the MPM_LIST_2. If MPM_FLAG_1 is the first value and MPM_FLAG_2 is the second value, the intra prediction mode of the current block is present in MPM_LIST_1, and the decoder additionally entropy decodes MPM_IDX_1, which is index information for the MPM_LIST_1, to determine the intra prediction mode of the current block. Can be induced.
- the intra prediction mode of the current block is present in the MPM_LIST_2, and the decoder additionally entropy decodes the MPM_IDX_2, which is index information for the MPM_LIST_2, to predict the intra prediction of the current block. Induce mode.
- the decoder may additionally entropy decode the REM_MODE, which is the residual intra prediction mode, to derive the intra prediction mode of the current block. At this time, the case where both MPM_FLAG_1 and MPM_FLAG_2 are the first value may not occur.
- the encoder according to at least one method of configuring the plurality of MPM lists, in-screen prediction of the current block of the intra prediction modes included in each MPM list from MPM_LIST_1 to MPM_LIST_2 By sequentially checking whether the same intra prediction mode as the mode exists, the intra prediction mode of the current block may be entropy encoded.
- the MPM_FLAG_1 may be entropy encoded with the first value.
- MPM_IDX_1 which is index information of the MPM_LIST_1, may be additionally entropy encoded.
- the MPM_FLAG_1 when the same intra prediction mode as the intra prediction mode of the current block does not exist in the MPM_LIST_1, the MPM_FLAG_1 may be entropy encoded with the second value.
- the MPM_FLAG_2 when the same intra prediction mode as the intra prediction mode of the current block exists in the MPM_LIST_2 (where MPM_FLAG_1 is the second value), the MPM_FLAG_2 may be entropy encoded with the first value.
- MPM_IDX_2 which is index information of the MPM_LIST_2, may be additionally entropy encoded.
- the MPM_FLAG_1 and the MPM_FLAG_2 may be entropy encoded with the second value.
- REM_MODE which is the prediction mode of the residual picture, may be additionally entropy encoded.
- the decoder uses the MPM_FLAG_1 and / or MPM_FLAG_2 indicators indicating whether the same intra prediction mode as the intra prediction mode of the current block exists in MPM_LIST_1 and MPM_LIST_2.
- Entropy decoding may be performed sequentially according to at least one method of constituting sequences.
- MPM_FLAG_1 when MPM_FLAG_1 is entropy decoded to a first value, the intra prediction mode of the current block is present in MPM_LIST_1, and MPM_IDX_1, which is index information for the MPM_LIST_1, is additionally entropy decoded to determine the intra prediction mode of the current block. Can be induced.
- MPM_FLAG_1 when MPM_FLAG_1 is entropy decoded to a second value, MPM_FLAG_2 may be entropy decoded.
- MPM_FLAG_2 When the decoded MPM_FLAG_2 is the first value, the intra prediction mode of the current block is present in the MPM_LIST_2, and MPM_IDX_2, which is index information of the MPM_LIST_2, is additionally entropy decoded to derive the intra prediction mode of the current block.
- REM_MODE which is the residual intra prediction mode
- the step of checking whether the MPM_FLAG_1 and the MPM_FLAG_2 is the first value or the second value may be sequentially performed.
- the encoder includes MPM_LIST_1, MPM_LIST_2,... If there are intra prediction modes that are identical to the intra prediction modes of the current block among the intra prediction modes included in, and MPM_LIST_N, the intra prediction modes that are identical to the intra prediction modes of the current block are MPM_LIST_1, MPM_LIST_2,... The indicators MPM_FLAG_1, MPM_FLAG_2,... Indicating which MPM list is among. , And MPM_FLAG_N may be entropy encoded. If the intra prediction mode of the current block exists in MPM_LIST_1, MPM_FLAG_1 is the first value and MPM_FLAG_2,... Except for MPM_FLAG_1. , And MPM_FLAG_N may be the second value. In this case, MPM_IDX_1, which is index information of the MPM_LIST_1, may be additionally entropy encoded.
- MPM_FLAG_2 is the first value and MPM_FLAG_1,... Except for MPM_FLAG_2.
- MPM_FLAG_N may be the second value.
- MPM_IDX_2, which is index information of the MPM_LIST_2, may be additionally entropy encoded.
- MPM_FLAG_N is the first value and MPM_FLAG_1, except MPM_FLAG_N,... ,
- MPM_FLAG_ (N-1) may be the second value.
- MPM_IDX_N which is index information of the MPM_LIST_N, may be additionally entropy encoded.
- the encoder includes MPM_LIST_1, MPM_LIST_2,... If the intra prediction modes identical to the intra prediction modes of the current block do not exist among the intra prediction modes included in, and MPM_LIST_N, the intra prediction modes that are identical to the intra prediction modes of the current block are MPM_LIST_1, MPM_LIST_2,... The indicators MPM_FLAG_1, MPM_FLAG_2,... Indicating which MPM list is among. , And MPM_FLAG_N may be entropy encoded with a second value. MPM_FLAG_1, MPM_FLAG_2,... And, when MPM_FLAG_N is the second value, REM_MODE, which is the prediction mode in the residual picture, may be additionally entropy encoded.
- the decoder has the same intra prediction modes as MPM_LIST_1, MPM_LIST_2,...
- MPM_FLAG_N can be entropy decoded.
- MPM_FLAG_1 is the first value, except for MPM_FLAG_1, MPM_FLAG_2,... If, and MPM_FLAG_N are the second values, the intra prediction mode of the current block may exist in MPM_LIST_1.
- MPM_IDX_1, which is index information of the MPM_LIST_1 may be additionally entropy decoded to derive an intra prediction mode of the current block.
- MPM_FLAG_2 is the first value and MPM_FLAG_1, except MPM_FLAG_2,... If, and MPM_FLAG_N are the second values, the intra prediction mode of the current block may be present in MPM_LIST_2.
- MPM_IDX_2, which is index information of the MPM_LIST_2 may be additionally entropy decoded to derive an intra prediction mode of the current block.
- MPM_FLAG_1 where MPM_FLAG_N is the first value and excludes MPM_FLAG_N,... , And MPM_FLAG_ (N-1) are the second values, the intra prediction mode of the current block may be present in MPM_LIST_N.
- MPM_IDX_N which is index information of the MPM_LIST_N, may be additionally entropy decoded to derive an intra prediction mode of the current block.
- the coder may use the following methods: MPM_LIST_1, MPM_LIST_2,...
- the intra prediction mode of the current block may be entropy encoded by sequentially checking whether the intra prediction modes identical to the intra prediction modes of the current block are present among the intra prediction modes included in each of the MPM_LIST_N.
- the MPM_FLAG_1 may be entropy encoded with the first value.
- MPM_IDX_1 which is index information of the MPM_LIST_1, may be additionally entropy encoded.
- the MPM_FLAG_1 when the same intra prediction mode as the intra prediction mode of the current block does not exist in the MPM_LIST_1, the MPM_FLAG_1 may be entropy encoded with the second value.
- the MPM_FLAG_2 when the same intra prediction mode as the intra prediction mode of the current block exists in the MPM_LIST_2 (where MPM_FLAG_1 is the second value), the MPM_FLAG_2 may be entropy encoded with the first value.
- MPM_IDX_2 which is index information of the MPM_LIST_2, may be additionally entropy encoded.
- the same intra prediction modes as the intra prediction modes of the current block are set to MPM_LIST_1, MPM_LIST_2,... , MPM_FLAG_1, MPM_FLAG_2, ... if not present in MPM_LIST_ (N-1).
- MPM_FLAG_ (N-1) may be entropy encoded with a second value.
- MPM_FLAG_1, MPM_FLAG_2, ..., MPM_FLAG_ (N-1) is the second value
- the MPM_FLAG_N is entropy coded to the first value.
- MPM_IDX_N which is index information of the MPM_LIST_N, may be additionally entropy encoded.
- the same intra prediction modes as the intra prediction modes of the current block are set to MPM_LIST_1, MPM_LIST_2,... , MPM_FLAG_1, MPM_FLAG_2,... if not present in MPM_LIST_N.
- MPM_FLAG_N may be entropy encoded with a second value.
- REM_MODE which is the prediction mode in the remaining picture, may be additionally entropy encoded.
- the decoder has the same intra prediction modes as MPM_LIST_1, MPM_LIST_2,... ,
- At least one or more of MPM_FLAG_N may be sequentially entropy decoded according to at least one method of orderings of the plurality of MPM lists.
- the intra prediction mode of the current block is present in MPM_LIST_1 and MPM_IDX_1, which is index information for the MPM_LIST_1, is additionally entropy decoded to derive the intra prediction mode of the current block. can do.
- MPM_FLAG_1 when MPM_FLAG_1 is entropy decoded to a second value, MPM_FLAG_2 may be entropy decoded.
- MPM_FLAG_2 When the decoded MPM_FLAG_2 is the first value, the intra prediction mode of the current block is present in the MPM_LIST_2, and MPM_IDX_2, which is index information of the MPM_LIST_2, is additionally entropy decoded to derive the intra prediction mode of the current block.
- MPM_FLAG_ (N-1) When MPM_FLAG_ (N-1) is entropy decoded to a second value, MPM_FLAG_N may be entropy decoded.
- MPM_FLAG_N When the decoded MPM_FLAG_N is the first value, the intra prediction mode of the current block is present in the MPM_LIST_N, and MPM_IDX_N, which is index information of the MPM_LIST_N, is additionally entropy decoded to derive the intra prediction mode of the current block.
- MPM_FLAG_N When MPM_FLAG_N is entropy decoded to a second value, REM_MODE, which is the residual intra prediction mode, may be additionally entropy decoded to derive the intra prediction mode of the current block.
- the step of checking whether the MPM_FLAG_N is the first value or the second value may be sequentially performed.
- the MPM list may be specified in the form of a flag as in the above-described MPM_FLAG_N, or may be encoded / decoded in the form of an index for specifying one of the plurality of MPM lists.
- Information on whether to use the MPM-based intra prediction mode derivation method in the current block (or the current slice, the current picture, the current sequence, etc.) may be encoded / decoded.
- the index may be encoded / decoded when an MPM-based intra prediction mode derivation method is used according to the information.
- At least one of the number or types of MPM lists belonging to the plurality of MPM lists may be fixed pre-defined to the encoder / decoder, and may be variable based on parameters related to the size, depth, shape, position, etc. of the current block / peripheral block. It may be determined as.
- the number of MPM lists pre-defined in the encoder / decoder may be one, two, three or more values.
- the maximum number of intra prediction modes belonging to each MPM list may be forced to be the same. In this case, the maximum number may be fixed pre-committed to the encoder / decoder, or may be signaled in a predetermined unit (eg, sequence, picture, slice, block, etc.).
- a predetermined mode may be added.
- the added mode may be a pre-appointed default mode or an intra prediction mode belonging to another MPM list.
- a mode that is not the same as the intra prediction mode included in the specific MPM list may be added.
- the redundancy check may be omitted between each MPM list. Any one of the MPM lists may share at least one same intra prediction mode with another MPM list.
- the encoder may configure a plurality of MPM lists from MPM_LIST_1 to MPM_LIST_N in accordance with at least one method of order of configuring the plurality of MPM lists.
- the number of prediction modes in the total candidate screen of the N MPM lists may be K. Where N and K may be positive integers.
- MPM_LIST_combined may be configured to include prediction modes in the candidate screen that are less than or equal to K among the prediction modes in the candidate pictures of the N MPM lists.
- the indicator MPM_FLAG_combined indicating whether the same intra prediction mode as the intra prediction mode of the current block exists in MPM_LIST_combined is the first parameter. It can be entropy coded as a value.
- MPM_IDX_combined which is index information of the MPM_LIST_combined, may be additionally entropy encoded.
- the MPM_FLAG_combined may be entropy encoded with the second value.
- MPM_FLAG_combined is the second value
- REM_MODE which is the prediction mode in the residual picture
- the decoder may entropy decode the indicator MPM_FLAG_combined indicating whether the same intra prediction mode as the intra prediction mode of the current block exists in MPM_LIST_combined.
- MPM_FLAG_combined is the first value
- the index information MPM_IDX_combined may be additionally entropy decoded to derive an intra prediction mode of the current block.
- MPM_FLAG_combined is the second value
- REM_MODE which is the residual intra prediction mode, may be additionally entropy decoded to derive the intra prediction mode of the current block.
- the intra prediction mode of the current block may be derived by encoding / decoding.
- the intra prediction mode of the current block may be entropy encoded / decoded without using the intra prediction mode of the neighboring block.
- an intra prediction mode of another color component may be used.
- an intra prediction mode of one or more luminance corresponding blocks corresponding to the chrominance target block may be used to derive an intra prediction mode for the chrominance block.
- the luminance corresponding block may be determined based on at least one of a size, a shape, or an encoding parameter of the chrominance block.
- the luminance corresponding block may be determined based on at least one of a size, a shape, or an encoding parameter of the luminance block.
- 15 is an exemplary diagram illustrating a luminance block and a color difference block when the ratio between color components is 4: 2: 0.
- the luminance corresponding block corresponding to the color difference block may be at least one of A, B, C, and D.
- the intra prediction mode of the luminance block A corresponding to the (0, 0) sample position of the chrominance block may be derived into the intra prediction mode of the chrominance block.
- the intra prediction mode of the luminance block D corresponding to the (nS / 2, nS / 2) sample position corresponding to the center of the chrominance block may be derived as the intra prediction mode of the chrominance block.
- an intra prediction mode of the chrominance block may be derived by using a combination of one or more intra prediction modes in the luminance block corresponding to the size of the chrominance block.
- a mode corresponding to an average of intra prediction modes of luminance blocks A and D corresponding to the (0, 0) sample position of the chrominance block and the (nS-1, nS-1) sample positions is defined in the screen of the chrominance block.
- a mode corresponding to an average of intra prediction modes of blocks A, B, C, and D in the luminance block corresponding to the size of the chrominance block may be derived as the intra prediction mode of the chrominance block.
- the mean one or more of various statistical values may be used, including maximum, minimum, mode, median and weighted average.
- an intra prediction mode of the color difference block may be derived based on at least one of the size, shape, or depth information of the luminance block. For example, an intra prediction mode of a relatively large D is obtained by comparing the magnitudes of luminance blocks A and D corresponding to (0, 0) sample positions of the chrominance block and (nS / 2, nS / 2) sample positions. Can be derived into the on-screen prediction mode.
- the intra prediction mode of the chrominance block may be derived by using the intra prediction mode of the corresponding luminance block. .
- an intra prediction mode of the color difference block may be derived based on at least one of the size, shape, or depth information of the color difference block. For example, when the size of the chrominance block falls within a predetermined range, the intra prediction mode of the luminance block corresponding to the (0, 0) sample position of the chrominance block may be derived into the intra prediction mode of the chrominance block. Alternatively, when the size of the chrominance block falls within a predetermined range, a large luminance block is compared by comparing the sizes of the luminance blocks corresponding to the (0, 0) sample positions of the chrominance block and the (nS / 2, nS / 2) sample positions.
- Intra-prediction mode of may be derived to the intra-prediction mode of the color difference block.
- the intra prediction mode of the luminance block corresponding to the position corresponding to the center of the chrominance block may be derived as the intra prediction mode of the chrominance block.
- the intra prediction mode for each of the divided sub blocks may be obtained by using at least one or more methods of deriving an intra prediction mode for the current block. Can be induced.
- the size of the current block and the size of the sub block may be M ⁇ N.
- M and N may be the same or different positive integers.
- the current block or subblock is CTU, CU, SU (signalling unit), QTMax, QTMin, BTMax, BTMin, 4x4, 8x8, 16x16, 32x32, 64x64, 128x128, 256x256, 4x8, 8x16, 16x8, 32x64, 32x8 , 4x32 and the like.
- QTMax and QTMin may represent the maximum and minimum sizes that can be split into a quart tree, respectively
- BTMax and BTMin may represent the maximum and minimum sizes that can be split into a binary tree.
- the size of the sub block may mean a partition structure of the sub block.
- the size of the sub block may vary depending on the size of the current block.
- the size corresponding to N equal to the horizontal and vertical sizes of the current block may be the size of the sub block.
- N may be a positive integer and may be at least one of 2, 4, 8, 16, 32, and 64.
- the size of the subblock may be 8x8.
- the size of the sub block may be a predetermined fixed size regardless of the size of the current block.
- the size of the sub block may be the minimum size regardless of the size of the current block, for example, 4x4.
- the size of the sub block may be determined based on the partition structure of the neighboring block of the current block. For example, when adjacent neighboring blocks are divided, the size of the sub block may be determined by dividing the current block.
- the size of the sub block may be determined based on an intra prediction mode of a neighboring block of the current block. For example, the size of the sub block may be determined by dividing the sub block based on a boundary where the intra prediction mode of the neighboring block is different.
- the size of the sub block may be determined based on encoding parameters of neighboring blocks. For example, the sub-block may be divided and determined based on whether the neighboring block is an intra coded block or an inter coded block.
- At least one or more of the size of the current block, the size of the sub block, and an N equal value for the current block may be fixed to a predetermined size.
- the current block may be divided into sub-blocks and induce an intra prediction mode for each sub-block.
- the intra prediction mode is performed in units of sub-blocks divided into 4 equal parts by the width and length of the CTU. Can be induced.
- the one or more sub blocks may be divided into blocks of smaller size. For example, when the size of the current block is 32x32 and the size of the subblock is 16x16, one or more subblocks may be divided into smaller blocks such as 8x8, 4x4, 16x8, 4x16, and the like.
- At least one or more of the size of the current block, the size of the sub block, and an N equal value for the current block may be encoded / decoded.
- the partition structure of the sub block with respect to the current block may be encoded / decoded.
- the divided subblocks may have various sizes and / or shapes.
- an intra prediction mode may be derived for each sub block.
- An indicator (eg, a flag) indicating that the intra prediction mode of the current block is derived using the intra prediction mode of the neighboring block may be encoded / decoded.
- the indicator may be Neighboring mode dependent intra prediction (NDIP_flag).
- the indicator may be encoded / decoded for at least one unit of the current block or subblock.
- the indicator may be encoded / decoded only when the size of the current block or sub block corresponds to a predetermined size or a predetermined size range.
- the predetermined size may be 64x64 or BTMax, for example.
- the current block may be divided into a plurality of sub blocks.
- the partition structure of the subblock may be predefined or determined by encoding / decoding.
- the intra prediction mode for the current block or each sub block within the current block may be derived using the intra prediction mode of the neighboring block.
- at least one or more of prev_intra_luma_pred_flag, mpm_idx, rem_intra_luma_pred_mode, intra_chroma_pred_mode, split_flag, QB_flag, quadtree_flag, binarytree_flag, and Btype_flag of the current block and / or subblock may not be encoded or decoded.
- Intra prediction mode can be derived.
- prev_intra_luma_pred_flag, mpm_idx, rem_intra_luma_pred_mode, intra_chroma_pred_mode, split_flag, QB_flag, quadtree_flag, binarytree_flag, and Btype_flag of the subblock may not be encoded / decoded.
- information related to at least one or more of the intra prediction mode of the current block or the sub-block and the split information of the sub-block may be encoded / decoded.
- the intra prediction mode for the first sub block among the sub blocks in the current block may be derived in a manner different from the remaining sub blocks.
- the first sub block may be one of a plurality of sub blocks in the current block.
- the first sub block may be the first sub block in the Z scan order.
- the intra prediction mode of the first subblock may mean an initial mode.
- the initial mode may be derived in another way.
- Another method for deriving the initial mode may be at least one of a method of deriving an intra prediction mode according to the present invention.
- a mode existing in the Nth (eg, first) of the MPM list may be derived as the initial mode.
- a mode that most frequently occurs among intra prediction modes of one or more blocks existing around the current block may be derived as the initial mode.
- the intra prediction mode encoded / decoded with respect to the current block may be derived as the initial mode.
- the intra prediction mode encoded / decoded with respect to the first subblock may be derived as the initial mode.
- an intra prediction mode of one or more sub blocks may be derived in any order.
- the random order may be a scanning order and may correspond to at least one of raster scan, upright scan, vertical scan, horizontal scan, diagonal scan, and zigzag scan.
- the number of subblocks for inducing the intra prediction mode according to the scanning order may be one or more.
- the random order may be adaptively determined according to the intra prediction mode of the neighboring block.
- FIG. 16 is a diagram for describing an embodiment in which a current block is divided into one or more subblocks to derive an intra prediction mode of each subblock.
- the size of the current block corresponds to a predetermined size (S1610).
- the predetermined size may be determined by the width or length of the current block.
- the determination of step S1610 may be performed according to whether the length of the current block is the length that can be divided into sub-blocks.
- the size of the current block is greater than or equal to the predetermined length when N equal lengths of each of the horizontal and vertical lengths are greater than or equal to a predetermined length. It may correspond to the size of. For example, when N is 4 and the arbitrary length is 4, if the current block is at least one of 256x256, 128x128, 64x64, 32x32, and 16x16, the size of the current block may correspond to the predetermined size. .
- the size of the current block may correspond to the predetermined size. For example, if M is 4, N is 2, and any length is 4, the current block is 128x64, 64x128, 128x32, 32x128, 128x16, 16x128, 128x8, 8x128, 64x32, 32x64, 64x16, 16x64, 64x8 If at least one of 8x64, 32x16, 16x32, 32x8, 8x32, 16x8, and 8x16, the size of the current block may correspond to the predetermined size.
- the size of the current block may correspond to the predetermined size. For example, if the partition information for the current block, quadtree and / or binary tree partitioning information is 0, indicating that the current block is not divided, and the horizontal or vertical length of the current block is greater than the minimum length, the current block.
- the size of may correspond to a predetermined size. In this case, the minimum length may be four.
- the split information about the current block and the intra prediction mode may be decoded (S1660). If the current block is not divided, the intra prediction mode for the current block may be decoded. When the current block is split, the intra prediction mode for each split subblock may be decoded.
- NDIP_flag may be decoded (S1620). In a next step, the decoded NDIP_flag value may be checked (S1630).
- NDIP_flag is 0 (No in S1630), as described above, at least one or more of split information about the current block, intra prediction mode of the current block, and intra prediction mode of the subblock may be decoded (S1660).
- the current block may be divided into subblocks (S1640).
- the sub block may be divided into a predetermined size and / or shape. Or it may be divided based on the decoded partition information.
- an intra prediction mode of a sub block generated by dividing a current block may be derived (S1650).
- the intra prediction mode of the block may be derived based on the intra prediction mode of the neighboring block.
- the intra prediction mode of the current block may be decoded and used.
- Intra-prediction may be performed on the current block or sub-block using the derived intra-prediction mode (S1670).
- FIG. 17 is a diagram illustrating an embodiment in which a current block is divided into sub blocks.
- the order of deriving an intra prediction mode of the plurality of sub-blocks in the current block may be a raster scan order based on the current block. Or, it may be a raster scan order based on a predetermined block size. For example, C1, C2, C3,... , An intra prediction mode of the sub blocks may be derived in a C16 order. Or C1, C2, C5, C6, C3, C4,... , C12, C15, C16 may be derived in the order. Alternatively, the intra prediction mode of each subblock may be derived in parallel. The intra prediction mode for each of the sub-blocks may be derived by at least one or more methods of deriving the intra prediction mode of the current block.
- an intra prediction mode of neighboring blocks may be used.
- the statistical value of the intra prediction mode of the block located at the left and the top of the (0, 0) position sample of each sub block may be derived to the intra prediction mode of each sub block.
- the intra prediction mode of each sub block illustrated in FIG. 17 may be derived using Equation 4 below.
- the intra prediction mode of the large block may be derived into the intra prediction mode of the sub block by comparing the sizes of the blocks located at the left and the top of the (0, 0) position sample of each sub block. In this case, when the sizes of the two blocks are the same, an average value of the intra prediction modes of the left and the upper blocks may be derived into the intra prediction mode of each sub block.
- the mode having the smaller value may be derived as the intra prediction mode of the sub-block by comparing the magnitudes of the intra prediction modes of the block located on the left and the top of the (0, 0) position sample of each sub block. .
- the values of the two modes are the same, one of the two modes may be derived as the intra prediction mode of the subblock.
- the intra prediction mode of each subblock may be derived using the intra prediction mode around the current block.
- an intra prediction mode of at least one neighboring block of the current block located at the left and / or the top of the (0, 0) sample position of each sub block may be used.
- the intra prediction mode of each sub block illustrated in FIG. 17 may be derived using Equation 5 below.
- the intra prediction modes of the neighboring blocks of the current block are all non-directional modes
- the intra prediction modes of the sub-blocks may be derived into at least one of the non-directional modes (eg, the DC mode and the planar mode).
- FIG. 18 illustrates another embodiment in which a current block is divided into sub blocks.
- the sub blocks in the current block may have various sizes and / or shapes.
- the partition structure and / or size of the current block and / or sub-block may be determined by encoding / decoding.
- the intra prediction mode for each sub block may be derived by at least one or more of the above-described methods of deriving the intra prediction mode of the current block or sub blocks.
- the statistical value of the intra prediction mode of the block located on the left and the top of the (0, 0) position sample of each sub block may be derived to the intra prediction mode of each sub block.
- the intra prediction mode of the sub block illustrated in FIG. 18 may be derived using Equation 6 below.
- the statistical value of the intra prediction mode of at least one neighboring block adjacent to each sub block may be derived to the intra prediction mode of each sub block.
- the intra prediction mode of each sub block illustrated in FIG. 18 may be derived using Equation 7 below.
- the intra prediction modes of the neighboring blocks of the current block are all non-directional modes
- the intra prediction modes of the sub-blocks may be derived into at least one of non-directional modes (eg, DC mode and planar mode).
- the MPM is used to derive an intra prediction mode for the current block, and then the derived mode and the screen of the neighboring block.
- the intra prediction mode of each subblock may be derived using the intra prediction mode.
- the sub mode is derived by at least one of the methods of deriving the intra prediction mode of the current block.
- Intra prediction mode of a block can be derived. For example, when the intra prediction mode of the current block derived using the MPM is Pred_mpm, the intra prediction mode of the sub block may be derived as follows.
- the Pred_mpm + 1 If less than Pred_mpm, Pred_mpm-1 may be derived to the intra prediction mode of the subblock.
- the intra prediction mode and the average value of the Pred_mpm of the blocks located at the left and the top of the (0, 0) position samples of each sub block may be derived to the intra prediction mode.
- the intra prediction mode may be derived by adjusting the Pred_mpm by comparing the intra prediction mode of the block located at the left or top of the (0, 0) position sample of each sub block with the size of the Pred_mpm.
- at least one of the aforementioned statistical values may be used instead of the average value.
- FIG. 19 illustrates another embodiment in which a current block is divided into subblocks.
- the number in each block means the number of intra prediction modes of the block.
- Cx (x is 1 .. 16) means the x-th sub-block in the current block.
- an arrow means an intra prediction direction or an angle of the block.
- the statistical value of the intra prediction mode of the block located on the left and top of the (0, 0) position samples of each sub block may be derived to the intra prediction mode of each sub block.
- the statistical value may be, for example, an average value.
- the intra prediction mode of the subblock may be derived from the intra prediction mode among the intra prediction modes of the neighboring block.
- the non-directional mode may include, for example, a planar mode (mode number 0) and a DC mode (mode number 1).
- the intra prediction mode of each sub block illustrated in FIG. 19 may be derived using Equation 8 below.
- 20 is a diagram illustrating another embodiment in which a current block is divided into sub blocks.
- the number in each block means the number of intra prediction modes of the block.
- Cx (x is 1 .. 14) means the x-th sub-block in the current block.
- an arrow means an intra prediction direction or an angle of the block.
- At least one of an intra prediction mode for a current block and split information of a sub block may be derived through decoding.
- the intra prediction mode for each sub block in the current block is an average value of the intra prediction mode of the derived current block and the intra prediction mode of the block located at the left and top of the (0, 0) position sample of each sub block. It can be derived using. For example, when the intra prediction mode of the derived current block is larger than the average value, 1/2 of the average value may be subtracted from the derived intra prediction mode, and may be added when the value is smaller than or equal to the average value. have. In this case, at least one of the aforementioned statistical values may be used instead of the average value.
- the intra prediction mode of the subblock may be derived from the intra prediction mode among the intra prediction modes of the neighboring block.
- the non-directional mode may include, for example, a planar mode (mode number 0) and a DC mode (mode number 1).
- the intra prediction mode of each sub block illustrated in FIG. 20 may be derived using Equation 9 below.
- the intra prediction mode of each sub block may be derived.
- the intra prediction mode may mean an intra prediction direction.
- the intra prediction mode may be included in a set of intra prediction modes predefined by the encoder and the decoder.
- a prediction direction field may be generated.
- a specific transform model may be used. After generating the IPDF, it may be used to determine the intra prediction mode of each sub block in the current block.
- the current block when the current block is divided from a block having a larger size or a shallower depth than the current block, the current block may be a sub block of a block having a larger size or a shallower depth than the current block.
- the prediction mode can be derived.
- the intra prediction mode for the current block may be derived by generating the intra prediction direction field.
- the specific transformation model may include at least one of a rigid transform, a similarity transform, an affine transform, a homography transform, a 3D transform, and other transforms. More than one can be used.
- the homography transformation may be a projection transformation.
- the intra prediction mode of each sub-block divided from the current block may include the intra prediction mode of the current block and the intra prediction modes of the blocks encoded / decoded using the intra prediction of the reconstructed blocks adjacent to the current block. Since it can be derived using at least one or more, bits necessary for entropy encoding / decoding of the intra prediction mode of each subblock can be reduced.
- the granularity of the sub block may be smaller than or equal to the size of the current block.
- the size of the current block is M ⁇ N (M, N is a positive integer)
- the size of the sub block may be M / K ⁇ N / L.
- K may be a divisor of M
- L may be a divisor of N.
- M / K or N / L may be a positive integer.
- P subblocks may exist in the current block based on the current block.
- P may mean a positive integer including 0.
- one, two, four, sixteen, or the like may exist in the current block.
- information about whether the current block is divided into sub-blocks may not be separately entropy encoded / decoded. It may be determined whether the current block is divided into sub-blocks based on information indicating whether the intra prediction mode of the current block is derived on a sub-block basis.
- the intra prediction mode of the sub-block may use at least one of intra prediction modes of the current block and intra prediction modes of blocks encoded / decoded using intra prediction among reconstructed blocks adjacent to the current block.
- the intra prediction mode of the subblock may not be entropy coded / decoded.
- the intra prediction mode of the current block may be entropy encoded / decoded.
- the intra prediction mode of the current block is not entropy encoded / decoded, but is a screen of blocks encoded / decoded using intra prediction from the reconstructed blocks adjacent to the current block. It may be derived using at least one or more of my prediction modes.
- blocks encoded / decoded using intra prediction may be referred to as seed blocks.
- the location of the seed block may be referred to as a seed point.
- An intra prediction mode of a seed block including a seed point may be referred to as a seed point intra prediction mode (SPIPM).
- FIG. 21 is a diagram illustrating an example of deriving an intra prediction mode of a current block by using an intra prediction mode.
- the size of the current block may be 16 ⁇ 16, and the size of each sub block may be (16/4) ⁇ (16/4).
- the seed block may be at least one of a plurality of adjacent blocks encoded / decoded using intra prediction.
- the seed block or seed position may be a fixed position based on the current block.
- at least one of the top, left, top left, bottom left, and top right blocks or positions may be determined as the seed block or the seed position based on the current block.
- the intra prediction mode of at least one or more adjacent blocks among the adjacent blocks c, d, e, f, and g of the current block may be used as the SPIPM.
- the intra prediction mode of the adjacent block h at the upper right end of the current block may be used as the SPIPM.
- the intra prediction mode of at least one or more adjacent blocks among the adjacent blocks a and b in the upper left of the current block may be used as the SPIPM.
- At least one intra prediction mode among the adjacent blocks i, j, k, and l on the left side of the current block may be used as the SPIPM.
- the intra prediction mode of the adjacent block m at the lower left of the current block may be used as the SPIPM.
- the intra prediction mode of the current block may also be used as the SPIPM.
- IPDFs may be generated using SPIPMs of one or more seed points.
- dx may mean displacement in the x-axis direction and dy may mean displacement in the y-axis direction.
- ⁇ may be determined according to the SPIPM.
- the intra prediction mode is a directional mode as shown in FIG. 6, each SPIPM has a unique direction and a positive angle of the x-axis reference may be determined as ⁇ .
- ⁇ 270 ° in the vertical prediction mode.
- ⁇ may be 0 °.
- ⁇ may be 225 °.
- ⁇ may be 45 °.
- ⁇ may be 135 °.
- the intra prediction mode having no orientation such as DC or planar mode
- the specific value may be, for example, an angle of 0, 90, 180, 270, or the like.
- D_sub may mean the size of the vector having the corresponding direction.
- the size of D_sub may be determined according to the size and / or shape of the seed block to which the seed location belongs.
- D_sub may have a fixed value P in all intra prediction modes.
- P may be an integer including 0.
- the current block is an MxN (M, N is a positive integer) block
- D_cur S (S is a positive integer)
- the D_sub (of the seed block is KxL (K, L is a positive integer).
- D_sub of all seed blocks may be determined as S.
- a list of SPIPMs can be constructed to form a candidate for generating an IPDF of the current block.
- the SPIPM list may be generated using an intra prediction mode of at least one of neighboring blocks neighboring the current block.
- the SPIPM may be configured with a set of one or more candidates among the upper left end (SPIPM_TL), the upper right end (SPIPM_TR), the lower left end (SPIPM_BL), and the lower right end (SPIPM_BR) of the current block.
- the SPIPM_TL may have at least one of the intra prediction modes of the neighboring blocks located at the upper and upper left and the left of the (0,0) position of the current block for the current block of the WxH size.
- the SPIPM_TR may have at least one of the intra prediction modes of the neighboring blocks located at the top and the top right of the (W-1, 0) position of the current block as a candidate.
- the SPIPM_BL may have at least one of the intra prediction modes of the adjacent blocks located at the left and the lower left of the (0, H-1) position of the current block as a candidate.
- SPIPM_BR may indicate an intra prediction mode of a neighboring block neighboring the current block. Alternatively, SPIPM_BR may be used to indicate an intra prediction mode of the current block.
- the SPIPM_TL may have at least one of intra prediction modes of adjacent blocks d, b, and j.
- SPIPM_TR may have at least one of intra prediction modes of adjacent blocks g and h.
- SPIPM_BL may have at least one of intra prediction modes of adjacent blocks i and m.
- SPIPM_BR may have at least one of intra prediction modes of the current block.
- seed block or seed positions may be searched in a certain order.
- a list of SPIPMs may be constructed using an intra prediction mode that is searched in the order of left, top, bottom left, top right, and top and exists at a corresponding seed block or seed position.
- each candidate of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR may be configured to exclude a mode having a different direction from that of other modes based on the similarity between prediction modes in the picture.
- IPMD Intra Prediction Mode Difference
- Non-directional modes eg DC_MODE and PLANAR_MODE
- DC_MODE DC_MODE and PLANAR_MODE
- the corresponding mode may be excluded from the candidate set for SPIPM_TL.
- the mode may be excluded from the candidate set for SPIPM_TR.
- the mode may be excluded from the candidate set for SPIPM_BL.
- the mode can be excluded from the candidate set for SPIPM_BR.
- the candidate may be excluded from the candidate set.
- the number of SPIPMs required for generating an IPDF may be determined according to a specific 2D transformation model used.
- the 2D transformation model may include a rigid transformation, similar transformation, affine transformation, homography transformation, and the like.
- the number of SPIPMs may be variably determined, such as one, two, three, four, or N (N is a positive integer) according to the 2D transformation model.
- At least two SPIPMs may be needed.
- Equation 10 In the case of a rigid body transformation, it may have 3-DoF (degree of freedom) as shown in Equation 10 below.
- (x, y) may be a coordinate before transformation of the seed position
- (x ', y') may be a coordinate after transformation.
- ⁇ , tx, ty are model parameters to be determined, and may be rotation angle, x-axis displacement, and y-axis displacement, respectively.
- (X, y)-(x ', y') pairs can be obtained using ⁇ determined from one SPIPM, and two equations relating to ⁇ , tx, ty can be determined by substituting Equation (10).
- four equations for ⁇ , tx, and ty may be determined from two SPIPMs, and three of them may be used to determine a rigid body transformation model.
- Two SPIPMs may be determined by selecting at least two of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR. The selected SPIPM may be added to the SPIPM list.
- FIG. 22 is a diagram illustrating an embodiment of constructing a SPIPM list including two SPIPMs.
- the sum of the IPMD values of the two SPIPM candidate modes may be sequentially filled in the SPIPM list.
- one of the candidate modes of SPIPM_TL and one of the candidate modes of SPIPM_TR may be used as two SPIPMs.
- one of the candidate modes of SPIPM_TL and one of the candidate modes of SPIPM_BL may be used as two SPIPMs.
- one of the candidate modes of SPIPM_TL and one of the candidate modes of SPIPM_BR may be used as two SPIPMs.
- one of the candidate modes of SPIPM_TR and one of the candidate modes of SPIPM_BL may be used as two SPIPMs.
- one of the candidate modes of SPIPM_TR and one of the candidate modes of SPIPM_BR may be used as two SPIPMs.
- one of the candidate modes of SPIPM_BL and one of the candidate modes of SPIPM_BR may be used as two SPIPMs.
- the SPIPM list can be populated using the available SPIPMs.
- SPIPM ⁇ delta can be used to populate the SPIPM list.
- delta may be any positive integer, for example, 1, 2, 3,... It can have a value such as.
- Equation 10 When two SPIPMs (SPIPM1 and SPIPM2) are determined, four equations for ⁇ , tx, and ty can be generated using Equation 10, and three of them can be used to determine parameters of the rigid body transformation model. .
- the determined model can be used for generating IPDF.
- the rigid body transformation may be determined using at least one of two equations calculated with SPIPM1 and two equations calculated with SPIPM2.
- the rigid body transformation may be determined using at least one of two equations calculated with SPIPM1 and two equations calculated with SPIPM2.
- At least two SPIPMs may be required when using a similarity transform as a transformation model for generating an IPDF.
- the similarity transformation may have 4-DoF (degree of freedom) as shown in Equation 11 below.
- (x, y) may be a coordinate before transformation of the seed position
- (x ', y') may be a coordinate after transformation
- a, b, c, and d may be model parameters to be determined.
- (X, y)-(x ', y') pairs can be obtained using ⁇ determined from one SPIPM, and two equations for a, b, c, and d can be determined by substituting Equation (11).
- four equations for a, b, c, and d may be determined from the two SPIPMs, and the similarity transformation model may be determined using the equations.
- Two SPIPMs may be determined by selecting at least two of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR.
- the selected SPIPM may be added to the SPIPM list.
- the SPIPM list may be sequentially filled in order of the sum of the IPMD values of the two SPIPM candidate modes being small.
- one of the candidate modes of SPIPM_TL and one of the candidate modes of SPIPM_TR may be used as two SPIPMs.
- one of the candidate modes of SPIPM_TL and one of the candidate modes of SPIPM_BL may be used as two SPIPMs.
- one of the candidate modes of SPIPM_TL and one of the candidate modes of SPIPM_BR may be used as two SPIPMs.
- one of the candidate modes of SPIPM_TR and one of the candidate modes of SPIPM_BL may be used as two SPIPMs.
- one of the candidate modes of SPIPM_TR and one of the candidate modes of SPIPM_BR may be used as two SPIPMs.
- one of the candidate modes of SPIPM_BL and one of the candidate modes of SPIPM_BR may be used as two SPIPMs.
- the SPIPM list can be populated using the available SPIPMs.
- SPIPM ⁇ delta can be used to populate the SPIPM list.
- delta may be any positive integer and 1, 2, 3,... It can have a value such as.
- Equation 11 When two SPIPMs (SPIPM1 and SPIPM2) are determined, four equations for a, b, c, and d may be generated through Equation 11 to determine parameters of the similarity conversion model. The determined model can be used for generating IPDF.
- At least three SPIPMs may be required when using affine transform as a transformation model for generating an IPDF.
- affine transformation it may have 6-DoF (degree of freedom) as shown in Equation 12 below.
- (x, y) may be a coordinate before transformation of the seed position
- (x ', y') may be a coordinate after transformation.
- a, b, c, d, e, and f may be model parameters to be determined.
- equation (12) By using ⁇ determined from one SPIPM, (x, y)-(x ', y') pairs can be obtained, and two equations for a, b, c, d, e, and f can be substituted into equation (12). Can be determined. In addition, six equations for a, b, c, d, e, and f may be determined from three SPIPMs, and the affine transformation model may be determined using the equations.
- the three SPIPMs may be determined by selecting at least three of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR. The selected SPIPM may be added to the SPIPM list.
- FIG. 23 is a diagram illustrating an embodiment of configuring a SPIPM list including three SPIPMs.
- the sum of the IPMD values of the three SPIPM candidate modes may sequentially fill the SPIPM list.
- one of the candidate modes of SPIPM_TL, one of the candidate modes of SPIPM_TR, and one of the candidate modes of SPIPM_BL may be used as three SPIPMs.
- one of the candidate modes of SPIPM_TL, one of the candidate modes of SPIPM_TR, and one of the candidate modes of SPIPM_BR may be used as three SPIPMs.
- one of the candidate modes of SPIPM_TL, one of the candidate modes of SPIPM_BL, and one of the candidate modes of SPIPM_BR may be used as three SPIPMs.
- one of the candidate modes of SPIPM_TR, one of the candidate modes of SPIPM_BL, and one of the candidate modes of SPIPM_BR may be used as three SPIPMs.
- the SPIPM list can be populated using the available SPIPMs.
- SPIPM ⁇ delta can be used to populate the SPIPM list.
- delta may be any positive integer and 1, 2, 3,... It can have a value such as.
- Equation 12 may generate six equations for a, b, c, d, e, and f to determine the parameters of the affine transformation model.
- the determined model can be used for generating IPDF.
- At least four SPIPMs may be required when using a homography transform or perspective transform as a transformation model for generating an IPDF.
- Equation 13 In the case of the homography transformation, it may have 8-DoF (degree of freedom) as shown in Equation 13 below.
- (x, y) may be a coordinate before transformation of the seed position
- (x ', y') may be a coordinate after transformation
- h1, h2, h3, h4, h5, h6, h7, h8 may be model parameters to be determined.
- (X, y)-(x ', y') pairs can be obtained using ⁇ determined from one SPIPM and substituted into equation (13) to h1, h2, h3, h4, h5, h6, h7, h8.
- Two equations can be determined.
- eight equations for h1, h2, h3, h4, h5, h6, h7, h8 can be determined from the four SPIPMs, which can be used to determine homography transformation models.
- SPIPMs may be determined by selecting at least four of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR. The selected SPIPM may be added to the SPIPM list.
- FIG. 24 is a diagram illustrating an embodiment of constructing a SPIPM list including four SPIPMs.
- the SPIPM list may be sequentially filled in order of the sum of the IPMD values of the four SPIPM candidate modes being small.
- two of the candidate modes of SPIPM_TL and two of the candidate modes of SPIPM_TR may be used as four SPIPMs.
- two of the candidate modes of SPIPM_TL and two of the candidate modes of SPIPM_BL may be used as four SPIPMs.
- two of the candidate modes of SPIPM_TL and two of the candidate modes of SPIPM_BR may be used as four SPIPMs.
- two of the candidate modes of SPIPM_BL and two of the candidate modes of SPIPM_BR may be used as four SPIPMs.
- two of the candidate modes of SPIPM_BL and two of the candidate modes of SPIPM_BR may be used as four SPIPMs.
- two of the candidate modes of SPIPM_TL, one of the candidate modes of SPIPM_TR, and one of the candidate modes of SPIPM_BL may be used as four SPIPMs.
- two of the candidate modes of SPIPM_TL, one of the candidate modes of SPIPM_TR, and one of the candidate modes of SPIPM_BR may be used as four SPIPMs.
- two of the candidate modes of SPIPM_TL, one of the candidate modes of SPIPM_BL, and one of the candidate modes of SPIPM_BR may be used as four SPIPMs.
- two of the candidate modes of the SPIPM_TR, one of the candidate modes of the SPIPM_TL, and one of the candidate modes of the SPIPM_BL may be used as four SPIPMs.
- two of the candidate modes of SPIPM_TR, one of the candidate modes of SPIPM_TL, and one of the candidate modes of SPIPM_BR may be used as four SPIPMs.
- two of the candidate modes of SPIPM_TR and one of the candidate modes of SPIPM_BL and one of the candidate modes of SPIPM_BR may be used as four SPIPMs.
- two of the candidate modes of SPIPM_BL, one of the candidate modes of SPIPM_TL, and one of the candidate modes of SPIPM_TR may be used as four SPIPMs.
- two of the candidate modes of SPIPM_BL, one of the candidate modes of SPIPM_TL, and one of the candidate modes of SPIPM_BR may be used as four SPIPMs.
- two of the candidate modes of SPIPM_BL, one of the candidate modes of SPIPM_TR, and one of the candidate modes of SPIPM_BR may be used as four SPIPMs.
- two of the candidate modes of SPIPM_BR, one of the candidate modes of SPIPM_TL, and one of the candidate modes of SPIPM_TR may be used as four SPIPMs.
- two of the candidate modes of SPIPM_BR, one of the candidate modes of SPIPM_TL, and one of the candidate modes of SPIPM_BL may be used as four SPIPMs.
- two of the candidate modes of SPIPM_BR, one of the candidate modes of SPIPM_TR, and one of the candidate modes of SPIPM_BL may be used as four SPIPMs.
- one of the candidate modes of SPIPM_BR, one of the candidate modes of SPIPM_TR, and one of the candidate modes of SPIPM_BR may be used as four SPIPMs.
- the SPIPM list can be populated using the available SPIPMs.
- SPIPM ⁇ delta can be used to populate the SPIPM list.
- delta may be any positive integer and 1, 2, 3,... It can have a value such as.
- Equation 13 When four SPIPMs (SPIPM1, SPIPM2, SPIPM3, SPIPM4) are determined, Equation 13 generates eight equations for h1, h2, h3, h4, h5, h6, h7, h8, and the parameters of the homography conversion model. Can decide. The determined model can be used for generating IPDF.
- an intra prediction mode of sub blocks KxL in the current block WxH may be allocated using the generated IPDF.
- the size of the sub block may be adaptively determined using the size of the current block and / or IPMD.
- the size of the sub block may be the same as the size of the current block.
- FIG. 25 is a diagram exemplarily illustrating a size of a sub block when the size of a current block is 16 ⁇ 16.
- the size of the sub block may be a fixed size of 8 ⁇ 8.
- the size of the sub block may be a fixed size of 4 ⁇ 4.
- the size of the sub block may be a fixed size of 2 ⁇ 2.
- the size of the sub block may be a fixed size of 1 ⁇ 1. In this case, the fixed size of 1 ⁇ 1 may be a sample unit.
- the size of the sub block may be determined based on the size of the current block.
- the size of the sub block may be determined based on at least one of four IPMDs of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR of the current block.
- the size of the sub block may be determined based on the size of the current block and at least one of four IPMDs of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR.
- the granularity of the sub-blocks may be entropy encoded / decoded in the bitstream.
- the information may include a video parameter set (VPS), a sequence parameter set (SPS), a picture parameter set (PPS), an adaptation parameter set (APS), a slice header, a tile header, a CTU unit, and a CU unit.
- Entropy encoding / decoding may be performed in at least one of a PU unit, a TU unit, a block unit, and a sub block unit.
- Information about the granularity of the sub-block may not be transmitted and may be adaptively derived from the encoder / decoder according to the size of the current block and / or IPMD.
- the size of the sub block may be determined based on at least one of encoding parameters of the current block and encoding parameters of neighboring blocks of the current block.
- the determined IPDF may be used to allocate an intra prediction mode of sub blocks.
- the coordinates of a specific position in each subblock may be substituted into the determined IPDF model to obtain the intra prediction mode at the corresponding position as a vector value.
- the specific position may be determined as a position of an arbitrary pixel in the sub block or a position that contacts a boundary of the sub block. For example, at least one of the upper left, upper right, lower left, lower right, and intermediate positions of the sub block may be determined as a specific position.
- FIG. 26 illustrates an example of allocating an intra prediction mode using the determined IPDF.
- ⁇ SB May be mapped to the intra prediction mode in the direction most similar to the directional mode.
- the mapping to the intra prediction mode may use a look-up table (LUT).
- the intra prediction mode of the subblocks when the intra prediction mode of the subblocks is allocated using the IPDF, the intra prediction mode of the subblocks may be allocated to the IPDF based on a neighbor neighbor method.
- the intra prediction mode of the sub blocks may be allocated using the IPDF, the intra prediction mode of the sub blocks may be allocated by quantizing the IPDF in an integer form.
- the intra prediction mode of the sub blocks may be allocated using the IPDF by rounding the IPDF to an integer.
- the information to be additionally entropy coded / decoded in the bitstream for intra-picture prediction using a transform model may include at least one of the following.
- the TBIP_flag is a picture of a sub-block unit using at least one of an intra prediction mode of a current block and intra prediction modes of blocks encoded / decoded using intra prediction among reconstructed blocks adjacent to the current block. Information about whether to derive my prediction mode.
- an intra prediction mode on a sub-block basis using a transform model For example, if there is an encoded / decoded block by performing intra prediction on a sub-block basis using a transform model among adjacent reconstructed blocks, instead of generating an IPDF of the current block directly, the sub-block is used by using the IPDF model of the adjacent block. Intra prediction mode of a unit can be derived.
- a predefined scanning order may be followed.
- the scanning order may be at least one of the following.
- 27 is a diagram exemplarily illustrating adjacent reconstructed blocks of a current block.
- scanning may be performed in the order of A-> B-> C-> D-> E in FIG.
- scanning may be performed in the order of A-> B-> D-> C-> E.
- scanning may be performed in the order of B-> A-> D-> C-> E.
- scanning may be performed in the order of E-> A-> B-> C-> D.
- scanning may be performed in an order other than the above.
- A, B, C, D, and C blocks may be excluded from scanning.
- blocks other than the A, B, C, D, and C blocks may be scanned.
- the adjacent reconstruction blocks that are the target of the scanning may be determined based on at least one of a size, a shape of at least one of the adjacent reconstruction blocks and the current block, and encoding parameters mentioned herein.
- FIG. 28 is a diagram for describing an embodiment of deriving an intra prediction mode using adjacent reconstruction blocks.
- At least one of SPIPM_A_TL, SPIPM_A_TR, SPIPM_A_BL, and SPIPM_A_BR of the A block is selected. Can be used to generate an IPDF of the A block.
- the IPDF of the generated A block may be used to derive at least one of SPIPM_Cur_TL, SPIPM_Cur_TR, SPIPM_Cur_BL, and SPIPM_Cur_BR of the current block, and generate an IPDF of the current block, thereby performing intra prediction on a sub-block basis. have.
- the IPDF of the current block may be derived using the IPDF of the corresponding neighbor reconstruction block.
- TBIP_flag information may be entropy encoded / decoded.
- FIG. 29 is a diagram for describing an embodiment of deriving an intra prediction mode on a sub-block basis.
- At least two SPIPMs may be required when using equidistant models. For example, as shown in (a) of FIG. 29, one of the candidate modes of the SPIPM_TL, one of the candidate modes of the SPIPM_TR, one of the candidate modes of the SPIPM_BL, and one of the candidate modes of the SPIPM_BR are selected and a total of four are selected. You can choose a dog. The four selected SPIPM candidate modes may populate the SPIPM list in order of decreasing sum of IPMD values, as shown in FIG. 24.
- Intra-prediction modes of sub-blocks located at the outermost side of the current block may be preferentially determined using SPIPM_TL, SPIPM_TR, SPIPM_BL and / or SPIPM_BR.
- determining the intra prediction mode at equal intervals may mean that the intra prediction modes are divided into equal intervals and allocated to sub blocks using at least two intra prediction modes.
- the intra prediction modes of the second outer sub blocks may be determined.
- the second outer sub blocks may be sub blocks F, G, J, and K.
- SPIPM_TL may be reset to the mode (mode of subblock A in FIG. 29A) of the upper left position of the upper left subblock (subblock F in FIG. 29A) of the second outer subblock.
- SPIPM_TR may be reset to a mode (mode of subblock D in FIG. 29A) of the upper right position of the upper right subblock (subblock G in FIG. 29A) of the second outer subblock. .
- SPIPM_BL may be reset to the mode (mode of subblock M in FIG. 29A) in the lower left position of the lower left subblock (subblock J in FIG. 29A) of the second outer subblock. Can be.
- SPIPM_BR is reset to the mode (mode of subblock P in FIG. 29A) of the lower right position of the lower right subblock (subblock K in FIG. 29A) of the second outer subblock. Can be. This process may be repeated recursively until the mode of all subblocks in the current block is determined.
- Information to be additionally entropy encoded / decoded for intra prediction on a sub-block basis using an equal interval model may be at least one of the following.
- FIG. 30 is a diagram for describing another embodiment of deriving an intra prediction mode on a sub-block basis.
- At least two SPIPMs may be needed to determine the intra prediction mode in sub-block units using the bilinear filter model. For example, as shown in (a) of FIG. 30, one of the candidate modes of the SPIPM_TL, one of the candidate modes of the SPIPM_TR, one of the candidate modes of the SPIPM_BL, and one of the candidate modes of the SPIPM_BR are selected and a total of four are selected. You can choose a dog. The four selected SPIPM candidate modes may populate the SPIPM list in order of decreasing sum of IPMD values, as shown in FIG. 24.
- the mode of the upper left subblock in the current block may be determined by the SPIPM_TL value.
- the mode of the upper right subblock may be determined by the SPIPM_TR value.
- the mode of the lower left subblock (subblock M in FIG. 30A) may be determined by the SPIPM_BL value.
- the mode of the lower right subblock (subblock P in FIG. 30A) may be determined by the SPIPM_BR value. As shown in (b) of FIG.
- the intra prediction modes of the upper left, upper right, lower left and lower right sub-blocks in the current block may be determined by SPIPM_TL, SPIPM_TR, SPIPM_BL and SPIPM_BR values, respectively.
- the present invention is not limited thereto, and at least one of intra prediction modes of the upper left, upper right, lower left and lower right sub-blocks in the current block may be determined by at least one of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR.
- the intra prediction mode of the other subblocks may be determined using a bilinear filter technique.
- Equation 14 below may be used.
- function () may be at least one of floor (), ceil (), or round ().
- function () may be round ().
- # of SubBlk in wdt may mean the number of sub blocks in a horizontal direction of the current block.
- # of SubBlk in hgt may mean the number of sub blocks in the vertical direction of the current block.
- the intra prediction mode of the remaining subblocks may be determined using Equation 14 above.
- Information to be additionally entropy encoded / decoded for intra prediction in sub-block units using a bilinear filter model may be at least one or more of the following.
- An intra prediction mode is derived for each sub-block by using at least one of the intra prediction mode of the current block and the intra prediction modes of blocks encoded / decoded using intra prediction among reconstructed blocks adjacent to the current block.
- Intra-prediction may be performed on a sub-block basis using the derived intra-prediction mode.
- a sample included in a subblock previously encoded / decoded in subblock units may be used as a reference sample for intra prediction in subblock units.
- the encoder may generate transform coefficients by performing at least one of a first-order transform, a second-order transform, and quantization on the residual block generated after performing intra prediction on a sub-block basis.
- the generated transform coefficients may be entropy coded.
- Primary transform, secondary transform, and quantization may be performed on the current block or may be performed on a sub-block basis. For example, at least one of the first transform, the second transform, and the quantization may be performed for the entire current block, or at least one of the first transform, the second transform, and the quantization may be performed for each subblock. At this time, none of the first-order transform, second-order transform, and quantization may be performed on the current block or subblock.
- the transform coefficients may be entropy decoded.
- the reconstructed residual block may be generated by performing at least one of inverse quantization, first order inverse transform, and second order inverse transform on the entropy decoded transform coefficient.
- Primary transform, secondary transform, and quantization may be performed on the current block or may be performed on a sub-block basis. For example, at least one of the first transform, the second transform, and the quantization may be performed for the entire current block, or at least one of the first transform, the second transform, and the quantization may be performed for each subblock. At this time, none of the first-order transform, second-order transform, and quantization may be performed on the current block or subblock.
- Information about intra prediction may be entropy encoded / decoded from the bitstream.
- 31 is a diagram illustrating a syntax structure including information about an intra prediction mode.
- the information about the intra prediction may include at least one or more of the following information.
- the information about the intra prediction may be selected from among a video parameter set (VPS), a sequence parameter set (SPS), a picture parameter set (PPS), an adaptation parameter set (APS), a slice header, and a tile header. It may be signaled through at least one.
- MPM Probable Mode
- Prediction mode information in luminance component screen ex) rem_intra_luma_pred_mode
- Prediction mode information in chrominance component screen ex) intra_chroma_pred_mode
- Curvature parameter of prediction mode in curved screen ex) cuv
- Weight parameter of prediction mode in curved screen ex) cw1, cw2,... , cwNs-1
- Intra prediction mode included in each MPM list for each of the N MPM lists when deriving the intra prediction mode of the current block using the N MPM lists or entropy encoding / decoding the intra prediction mode of the current block.
- an indicator MPM flag indicating whether or not the same intra prediction mode as the intra prediction mode of the current block exists (eg, MPM_FLAG_1, MPM_FLAG_2,... , MPM_FLAG_N
- the position or order in which the intra prediction modes exist in the specific MPM list Index information for: eg MPM_IDX_1, MPM_IDX_2,... , MPM_IDX_N
- the MPM (Most Probable Mode) If the flag is 1, the intra prediction mode of the luminance component is derived from the candidate modes, including my mode MPM index (mpm _ idx) the use of the screen of the already encoded / decoded adjacent units Can be.
- the intra-prediction mode of the luminance component may be encoded / decoded using the intra prediction mode information (rem_ intra luma _ _ pred _mode) for the luminance component.
- the intra prediction mode of the chrominance component may be encoded / decoded using the intra prediction mode information ( intra_chroma_pred_mode) for the chrominance component and / or the intra prediction mode for the corresponding luminance component block.
- the prediction mode in the curved screen may derive the pixel prediction value using reference pixels of different angles according to the position (x, y) of the pixel in the prediction block.
- the pixels in the prediction block may be grouped into a plurality of groups, and the first group may use an intra prediction mode having an angle different from that of the second group.
- Each group may include one or more pixels.
- Each group can have triangles, squares, and other geometric shapes.
- the curvature parameter cuv of the prediction mode within the curved screen may mean a curvature applied to the prediction mode within the curved screen. Curved intra prediction may be performed using one or more cuv for the current block.
- the curvature parameter may be derived from the curvature parameter (s) of at least one of the curvature parameters of the neighboring blocks.
- One or more weight parameters cw of the prediction mode in the curved screen may be applied to the current block.
- different weighting parameters may be applied in predetermined units such as pixels, rows, columns, or sub-blocks of the current block.
- the weight parameter may be derived from at least one weight parameter (s) of the weight parameters of the neighboring blocks.
- the neighboring block for deriving the curvature parameter and / or the weight parameter may be already encoded / decoded blocks adjacent to the top, left and / or right side of the current block.
- Various forms of curved intra prediction may be performed using at least one of cuv and cw.
- At least NxMx4 or more prediction blocks may be generated to perform intra prediction of the current block.
- At least four prediction blocks may be generated to perform intra prediction of the current block.
- At least eight prediction blocks may be generated to perform intra prediction of the current block.
- At least eight prediction blocks may be generated to perform intra prediction of the current block.
- At least 16 prediction blocks may be generated to perform intra prediction of the current block.
- Two or more cuv and / or cw information may be encoded / decoded using a default value and a delta value.
- Default may mean one cuv value and / or one cw value
- delta may be a constant value.
- two curvature parameters may be default_cuv, default_cuv + delta_cuv.
- the N curvature parameters are default_cuv, default_cuv + delta_cuv, default_cuv + 2 * delta_cuv,... , default_cuv + (N-1) * delta_cuv. (Where N is a positive integer of 2 or greater)
- the 2N + 1 curvature parameters are default_cuv, default_cuv + delta_cuv, default_cuv-delta_cuv, default_cuv + 2 * delta_cuv, default_cuv-2 * delta_cuv,... , default_cuv + N * delta_cuv and default_cuv-N * delta_cuv. (Where N is a positive integer of 1 or more)
- the two weighting parameters may be default_cw, default_cw + delta_cw. (Default_cw + delta_cw is the addition of element units of the vector)
- the M weight parameters are default_cw, default_cw + delta_cw, default_cw + 2 * delta_cw,... , default_cw + (M-1) * delta_cw. (Where default_cw + delta_cw is the addition of the unit of elements of the vector, and M is a positive integer of 2 or more)
- the 2M + 1 curvature parameters are default_cw, default_cw + delta_cw, default_cw-delta_cw, default_cw + 2 * delta_cw, default_cw-2 * delta_cw,... , default_cw + M * delta_cw, default_cw-M * delta_cw. (Where M is a positive integer of 1 or greater)
- the above-described cuv and / or cw information may be encoded or decoded into a bitstream.
- the encoder and the decoder may share and store information about the number and / or value of cuv and / or cw in the form of a lookup table, for example.
- prediction of the residual signal may be performed using an intra picture mode determined for the current block or sub block.
- the information about the intra prediction may be entropy encoded / decoded from the bitstream based on at least one or more of coding parameters.
- NDIP_flag may be encoded / decoded based on information related to partition information of a block.
- the NDIP_flag may be encoded / decoded.
- NDIP_flag may not be encoded / decoded.
- At least one or more of the information about the intra prediction may not be signaled based on at least one or more of the size and shape of the block.
- the size of the current block corresponds to a predetermined size
- at least one of the information about the intra prediction for the current block is not signaled, and the intra prediction corresponding to the higher block size previously encoded / decoded is not signaled.
- One or more information regarding may be used.
- one or more pieces of information about the intra prediction corresponding to the higher block size previously encoded / decoded without at least one of the information about the intra prediction for the current block is not signaled. Can be used.
- prediction of the residual signal may be performed using an intra picture mode determined for the current block or sub block.
- At least one or more of the following binarization methods may be used.
- a reference sample used for prediction may be configured.
- the reference sample may be constructed using one or more reconstructed samples or sample combinations around the current block.
- filtering may be applied to construct the reference sample.
- each of the reconstructed samples on the plurality of reconstructed sample lines may be used as a reference sample.
- the reference sample may be configured after inter-sample filtering on the same reconstructed sample line.
- a reference sample may be configured after filtering between samples on different reconstructed sample lines.
- the configured reference sample may be represented by ref [m, n], a reconstructed sample around the sample, or a filtered sample thereof as rec [m, n].
- m or n may be a predetermined integer value. If the size of the current block is W (horizontal) x H (vertical), when the top left sample position within the current block is (0, 0), the relative position of the closest top left reference sample relative to that sample position is determined. Can be set to (-1, -1).
- 32 is a diagram illustrating surrounding reconstructed sample lines that may be used for in-picture prediction of a current block.
- a reference sample may be constructed using one or more reconstructed sample lines adjacent to the current block.
- one line of the plurality of reconstructed sample lines illustrated in FIG. 32 may be selected, and a reference sample may be configured using the selected reconstructed sample line.
- the selected reconstructed sample line may be fixedly selected as a specific line among a plurality of reconstructed sample lines.
- the selected reconstructed sample line may be adaptively selected as a specific line among a plurality of reconstructed sample lines. In this case, an indicator for the selected reconstructed sample line may be signaled.
- a reference sample may be constructed using a combination of one or more reconstructed sample lines of the plurality of reconstructed sample lines shown in FIG. 32.
- the reference sample may consist of a weighted sum (or weighted average) of one or more reconstructed samples.
- the weight used for the weighted sum may be given based on the distance from the current block. In this case, the closer to the current block, the greater the weight may be given. For example, Equation 15 below may be used.
- the reference sample may be configured using at least one of an average value, a maximum value, a minimum value, a median value, and a mode value of the plurality of reconstructed samples based on at least one of a distance from the current block or an intra prediction mode.
- the reference sample may be configured based on a change (change amount) of values of a plurality of consecutive reconstructed samples.
- At least one of the number, location, and configuration method of the reconstructed sample lines used in the reference sample configuration may include a boundary at the top or the left of the current block corresponding to at least one of a picture, slice, tile, and coded tree block (CTB). It may be determined differently in some cases.
- CTB coded tree block
- the reconstructed sample line 1 is used for the upper side and the reconstructed sample line for the left side. 1 and 2 can be used.
- the reconstructed sample lines 1 to 2 are used for the upper side and the reconstructed sample for the left side. Lines 1 to 4 can be used.
- the reconstructed sample line 1 is used for the upper side and the reconstructed sample line 2 for the left side. It is available.
- the line of the reference sample configured through the above process may be one or more.
- the method of configuring a reference sample on the upper side of the current block may be different from the method of configuring the reference sample on the left side.
- Information indicating that a reference sample is configured by at least one or more of the above methods may be encoded / decoded. For example, information indicating whether a plurality of reconstructed sample lines are used may be encoded / decoded.
- a reference sample may be configured for each sub block.
- 33 is a diagram for describing an embodiment of configuring a reference sample for a subblock included in a current block.
- the reference sample of each subblock is at least one of the following according to a scanning scheme for performing the prediction of the subblock. Can be configured in a manner.
- a reference sample of each subblock may be configured using N reconstructed sample lines adjacent to the current block.
- An example shown in FIG. 33 is the case where N is 1.
- a reference sample may be configured by using samples of at least one subblock among pre-encoded / decoded left, top, right top and bottom left ends.
- a reference sample may be configured by using at least one sample of at least one sub-block among pre-encoded / decoded left, upper, upper right and lower left ends.
- a plurality of subblocks may be predicted in a zigzag-scan order (1-> 2-> 5-> 9-> 6-> 3-> 4->... 12-> 15-> 16).
- the reference sample may be configured by using at least one subblock sample among the left, upper, upper right and lower left that are previously encoded / decoded.
- a reference sample when predicting a plurality of subblocks according to a vertical scan order (1-> 5-> 9-> 13-> 2-> 6->... 8-> 12-> 16), in configuring a reference sample of the K-th subblock, a reference sample may be configured by using samples of at least one or more subblocks among the left, upper, upper right, and lower left that are previously encoded / decoded.
- an availability determination and / or padding of a block including the reference sample may be performed. For example, when a block including a reference sample is available, the corresponding reference sample may be used. On the other hand, if the block containing the reference sample is not available, one or more surrounding reference samples may be used to pad and replace the unused reference samples.
- the reference sample exists outside at least one of a picture, a tile, a slice, a coding tree block (CTB), and a predetermined boundary, it may be determined that the reference sample is not available.
- CTB coding tree block
- CIP constrained intra prediction
- FIG. 34 is a diagram for describing a method of replacing an unavailable restoration sample by using an available restoration sample.
- the surrounding available reconstructed samples may be used to replace the unavailable samples. For example, as shown in FIG. 34, when there are available and unavailable samples, one or more available samples may be used to replace the unavailable samples.
- the sample value of the insoluble sample may be replaced with the sample value of the available sample in a predetermined order.
- the soluble sample used to replace the insoluble sample may be a soluble sample adjacent to the insoluble sample. If there are no adjacent available samples, the first appearing or closest available sample may be used.
- the replacement order of the unavailable sample may be, for example, the order from the bottom left to the top right. Alternatively, the order may be from the upper right to the lower left. Or in the order of the upper left and / or lower left at the upper left corner. Or from the upper right corner and / or the lower left corner to the upper left corner.
- replacement of the unavailable sample may be performed in the order of the upper right sample starting from 0, which is the lower left sample position.
- the first four unavailable samples may be replaced with the value of the first appearing or nearest available sample a.
- the next thirteen unavailable samples can be replaced with the value of the last available sample b.
- the insoluble sample can be replaced using a combination of available samples.
- the average value of the available samples adjacent to both ends of the insoluble sample can be used to replace the insoluble sample.
- the first four unavailable samples can be filled with the value of the available sample a
- the next thirteen unavailable samples can be filled with the average value of the available samples b and c.
- thirteen unavailable samples can be replaced with any value between the sample values of available samples b and c.
- the unavailable samples can be replaced with different values.
- an insoluble sample may be replaced with a value closer to the value of a as it becomes closer to available sample a.
- an unavailable sample can be replaced with a value closer to the value of b as it approaches the available sample b. That is, based on the distance from the insoluble sample to the available samples a and / or b, the value of the insoluble sample can be determined.
- One or more of a plurality of methods including the above methods may optionally be applied for the replacement of an insoluble sample.
- the alternative method of the unavailable sample may be signaled by information included in the bitstream, or a method predetermined by the encoder and the decoder may be used.
- an alternative method of insoluble sample can be derived by a predetermined method.
- an alternative method of insoluble samples can be selected based on the difference between the values of available samples a and b and / or the number of insoluble samples.
- an alternative method may be selected based on the difference between the values of the two available samples and the threshold and / or the comparison of the number and threshold of the unavailable samples. For example, if the difference between the values of the two available samples is greater than the threshold and / or the number of unavailable samples is greater than the threshold, the unavailable samples may be replaced to have different values.
- the filtering may be determined with respect to the configured one or more reference samples according to at least one of an intra prediction mode, a size and a shape of the block of the current block.
- the filter type may vary according to at least one of an intra prediction mode, a size, and a shape of the current block.
- whether to apply filtering and / or type for each of the plurality of reference sample lines may be determined differently. For example, filtering may be applied to the first adjacent line and no filtering may be applied to the second line.
- the value to which the filtering is applied and the value to which the filtering is not applied may be used together for the reference sample.
- the intra prediction mode (intraPredMode) of the decoded target block is the directional prediction mode
- 35 is a diagram illustrating a threshold for each block size for determining whether to filter.
- the threshold for a 4x4 block is 10
- the threshold for an 8x8 block is 7
- the threshold for a 16x16 block is 1
- the threshold for a 32x32 block is 0
- the threshold for a 64x64 block is 10.
- minDistVerHor value is larger than the threshold value allocated to the corresponding block size (minDistVerHor> intraHorVerDistThresh), filtering may be performed. If the minDistVerHor value is smaller than or equal to, the filtering may not be performed.
- FIG. 36 is a diagram exemplarily illustrating whether filtering is performed according to a block size and / or an intra prediction mode.
- X may indicate that filtering is not performed and O may indicate that filtering is performed.
- bi-linear interpolation filtering may be performed on an encoding / decoding target block having a large block size. For example, a second derivative value in the vertical direction and the horizontal direction can be obtained for an encoding / decoding target block having a block size of N S.
- At least one of a 3-tap filter, a 5-tap filter, a 7-tap filter, and an N-tap (N is positive integer) filter according to at least one of an intra prediction mode, a block size, and a shape of the current block.
- N is positive integer
- An intra prediction may be performed on the current block or sub block based on the derived intra prediction mode and a reference sample.
- the current block may mean a sub block.
- non-directional intra prediction may be performed.
- the prediction mode in the non-directional view may be at least one of a DC mode and a planar mode.
- the intra prediction of the DC mode may be performed using an average value of one or more reference samples among the configured reference samples. In this case, filtering may be applied to one or more prediction samples located at the boundary of the current block.
- the intra prediction of the DC mode may be adaptively performed based on at least one of the size and shape of the current block.
- 37 is an exemplary diagram for describing intra prediction according to a shape of a current block.
- prediction may be performed using an average value of reference samples on the top and left sides of the current block.
- the prediction may be performed using an average value of reference samples adjacent to the longer side among the horizontal and vertical lengths of the current block. .
- predetermined samples are selected from reference samples on the top or left side of the current block, and prediction may be performed using an average value of the selected samples.
- the intra prediction of the DC mode may be performed using an average value of one or more reference samples among the configured reference samples.
- Equation 16 Equation 16 below may be used.
- filtering may be applied to one or more prediction samples located at the boundary of the current block.
- filtering may be performed on the N plurality of columns and / or rows on the left and / or top of the current block.
- N may be a positive integer greater than one.
- FIG. 38 is a diagram for describing filtering during intra prediction in a DC mode.
- filtering may be performed on the top 1 row and / or the left 1 column of the target block.
- the filtering may be performed using Equation 17 below.
- In-plane prediction in a planar mode may be performed by calculating a weighted sum considering a distance from the configured one or more reference samples according to the position of the prediction target sample in the screen of the current block.
- the prediction block may be obtained as a weighted sum of N reference samples depending on the position (x, y) of the sample to be predicted.
- N may be a positive integer, for example four.
- 39 is a diagram for describing intra prediction in a planar mode.
- prediction at each pixel position (x, y) constituting the prediction block is performed.
- the pixel value may be derived by a weighted sum of the upper reference pixel (c), the left reference pixel (b), the upper right corner pixel (d) of the encoding / decoding target block, and the lower left corner pixel (a) of the encoding / decoding target block. have.
- the derivation of the weighted sum may be performed using Equation 18 below.
- intra-directional prediction may be performed.
- the directional prediction mode may be at least one of a horizontal mode, a vertical mode, and a mode having a predetermined angle.
- the intra prediction in the horizontal / vertical mode may be performed using one or more reference samples present on the horizontal / vertical line at the location of the intra prediction sample.
- the intra prediction of the mode having the predetermined angle may be performed using one or more reference samples existing on and around the predetermined angle line at the position of the intra prediction sample.
- N reference samples may be used.
- N may be a positive integer such as 2, 3, 4, 5, 6.
- prediction may be performed by applying an N-tap filter such as a 2-tap, 3-tap, 4-tap, 5-tap, 6-tap filter.
- intra prediction may be performed based on location information.
- the location information may be encoded / decoded, and the reconstructed sample block at the location may be derived into a prediction block in the screen of the current block.
- a block found by searching for a block similar to the current block in the decoder may be derived as a prediction block in the screen of the current block.
- intra prediction between color components may be performed.
- an intra prediction of the color difference component may be performed using the reconstructed luminance component of the current block.
- an intra prediction may be performed on another color difference component Cr by using the restored one color difference component Cb of the current block.
- Intra-prediction may be performed by combining one or more of the above-described various intra-prediction methods.
- an intra prediction block for the current block may be configured through a weighted sum of blocks predicted using a predetermined non-directional prediction mode and blocks predicted using a predetermined directional prediction mode. have.
- the weight may be differently applied according to at least one or more of the prediction mode, the size, the shape of the block, and / or the location of the sample of the current block.
- the prediction block may be obtained through a weighted sum of a value predicted using the intra prediction mode for the current block and a value predicted using the predetermined mode in the MPM list. Can be configured.
- intra prediction may be performed using one or more reference sample sets. For example, an intra prediction may be performed on the current block through a weighted sum of blocks predicted in the screen as reference samples without filtering to the configured reference samples and blocks predicted in the screen as reference samples to which filtering is applied. Can be.
- the filtering process using the reconstructed samples of the surroundings may be performed.
- the filtering process may or may not be performed according to at least one of the prediction mode, the size, the shape of the block, and / or the location of the sample of the current block.
- the filtering process may be included in a process of performing the intra prediction, and may be performed as one step.
- at least one of a filter tap, a coefficient, an applied line number, and an applied sample number may be adaptively determined based on at least one of an intra prediction mode, a block size, and a shape of the current block.
- the intra-prediction mode is performed by dividing the current block into sub-blocks and deriving the intra prediction mode for each sub block using the intra prediction mode of the neighboring block, and applying filtering to each sub block in the current block.
- filtering can do.
- a low-pass filter may be applied to the entire current block.
- a filter may be applied to samples located at the boundary of each subblock.
- a filter may be applied to the prediction block or the reconstructed block of each sub block, and one or more samples of the sub block to which the filter is applied may be used to perform intra prediction on a subsequent sub block.
- each subblock may mean at least one of a sub / decoding block, a prediction block, and a transform block.
- the intra prediction mode and / or the intra prediction may be performed for the prediction block which is each sub block.
- each 8x8 or 4x4 block may mean a transform block and an intra prediction on the additionally divided block using the intra prediction mode of the 16x16 block. Can be performed.
- the current block may be encoded / decoded using at least one of N directional modes.
- N may be a positive integer including 33, 65, and the like.
- the prediction mode in each directional screen may have a predetermined angle value.
- the current block may be encoded / decoded in M sample unit directional modes.
- M may be a positive integer.
- the directional mode in a sample unit may mean a mode for predicting by using the at least one prediction mode in the directional screen in units of one or more prediction targets in the current block.
- the configured reference sample may be reconstructed according to the directional prediction mode.
- the directional prediction mode is a mode that uses both reference samples existing on the left side and the upper side
- one-dimensional array may be configured for the reference sample on the left side or the top side.
- 40 is a view for explaining one embodiment of generating a one-dimensional array (1-D reference sample array, p 1, ref) of the reference sample from P ref.
- one or more of the reference samples present on the left side may be used to construct a one-dimensional array of the upper reference sample.
- the sample used to configure the upper reference sample among the left reference samples may vary according to the directional mode.
- the left reference sample may be moved to form an upper reference sample, or a weighted sum of one or more left reference samples may be used to construct an upper reference sample.
- interpolated prediction of a real unit may be performed. For example, based on the angular parameter (intraPredAngle) corresponding to each directional prediction mode, the offset (iIdx) and / or weight (iFact) values for predictive sample interpolation according to the sample position in the current block are shown below. You can also decide together.
- the offset and the weight for the directional mode having the vertical direction may be determined as in Equation 19 below.
- the prediction sample value may be determined differently according to the iFact value of Equation 19. For example, if iFact is nonzero, reference sample P 1, ref The location of the prediction in is a real unit rather than a full sample location. Accordingly, a prediction sample value at the target sample (x, y) position may be generated using a plurality of reference samples adjacent to the real position (eg, two reference samples adjacent to the left and right) as shown in Equation 20 below. In this case, the plurality of adjacent reference samples may be four or six adjacent to the left and right.
- a prediction sample value may be generated using Equation 21 below.
- the 3-tap [1/4: 2/4: 1/4] filter may be applied using the reference samples P 1, ref and the reference samples existing on the left and right.
- filtering may not be performed on the reference sample.
- interpolation prediction for the reference sample may not be necessary.
- a process of configuring a 1D array for the reference samples may not be necessary.
- FIG. 41 is a view for explaining an embodiment using reference samples of different angles according to sample positions in a prediction block.
- a unit for applying the directional mode may be different. That is, prediction may be performed using one or more directional modes in units of at least one of samples, sample groups, and lines in the target block.
- prediction may be performed using a directional mode on a current block basis.
- prediction may be performed by using the directional mode in units of the prediction target sample lines in the current block. That is, prediction may be performed by using different directional modes for at least one of the horizontal and vertical lines in the current block.
- prediction may be performed by using a directional mode in units of a predetermined sample group in the current block. That is, prediction may be performed using different directional modes for groups including N samples in the current block.
- prediction may be performed by using a directional mode in units of predicted samples in a current block. That is, prediction may be performed by using different directional modes for each prediction target sample in the current block.
- prediction may be performed using one or more directional modes in units of at least one of a sample, a sample group, and a line in the target block.
- FIG. 41A illustrates a case where different directional modes are used for each sample unit in the target block.
- a prediction value may be generated using reference samples located at angles of the respective directional modes on a sample basis.
- FIG. 41B illustrates a case in which different directional modes are used in units of horizontal lines in the target block.
- a prediction value may be generated using reference samples located at angles of the respective directional modes in units of horizontal lines.
- FIG. 41C illustrates a case in which different directional modes are used in units of vertical lines in a target block.
- a prediction value may be generated using reference samples positioned at angles of the respective directional modes in units of vertical lines.
- FIG. 41D illustrates a case in which different directional modes are used in units of sample groups in a diagonal line direction in the target block.
- a prediction value may be generated using reference samples located at angles of respective directional modes in units of sample groups in a diagonal line direction.
- FIG. 41E illustrates a case where different directional modes are used in units of L-shape lines in the target block.
- a prediction value may be generated using reference samples positioned at angles of the respective directional modes in units of right angle lines.
- the position of the reference pixel for generating the prediction value of the arbitrary position (x, y) in the prediction block may be determined as shown in Equation 22 below. Can be.
- the curvature may be adjusted by adjusting the cuv.
- cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the positions of the reference pixels may move to the right. In addition, as the cuv value decreases, the curvature decreases, and the position of the reference pixels may move to the left (up to a position of x).
- cw i may be a parameter including N weights that are the height of the block or the number of rows. Each weight may have a real number greater than or equal to zero.
- the position of the reference pixel used by the prediction pixel included in the corresponding row may be adjusted. For example cw i As the value increases, the positions of the reference pixels used by the prediction pixels of the i th row may move to the right. Also, cw i As the value decreases, the position of the reference pixels may move to the left (up to the position of x).
- various types of intra prediction may be performed by using a combination of the curvature parameter cuv and / or the weighted row parameter cw i .
- FIG. 43 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 42.
- N may be a positive integer.
- the prediction target pixel predSamples [x] [y] may be derived to the reference pixel p (pos, -1).
- pos may refer to a position of a reference pixel.
- predSamples [x] [y] is 1 for p (floor (pos), -1) and p (ceil (pos), -1). It can be derived as an interpolated predicted value in / N pel units.
- floor (pos) is an integer value less than or equal to pos and may mean a maximum value.
- ceil (pos) is an integer value greater than or equal to pos and may mean a minimum value.
- p ref may be converted into p 1 and ref before generating the predictive sample value for convenience of calculation.
- the calculated positions of all reference pixels are in the maximum range of the available reference pixels. It can be used after it has been converted to normalized values.
- Equation 23 can be determined.
- the curvature may be adjusted by adjusting the cuv.
- cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the positions of the reference pixels may move to the left. In addition, as the cuv value decreases, the curvature decreases, and the position of the reference pixels may move to the right (up to the position of x).
- cw i may be a parameter including N weights that are the height of the block or the number of rows. Each weight may have a real number greater than or equal to zero.
- the position of the reference pixel used by the prediction pixel included in the corresponding row may be adjusted. For example cw i As the value increases, the positions of the reference pixels used by the prediction pixels of the i th row may move to the left. Also, cw i As the value decreases, the positions of the reference pixels may move to the right (up to the position of x).
- various types of intra prediction may be performed by using a combination of the curvature parameter cuv and / or the weighted row parameter cw i .
- FIG. 45 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 44.
- N may be a positive integer.
- the prediction target pixel predSamples [x] [y] may be derived to the reference pixel p (pos, -1).
- predSamples [x] [y] is 1 for p (floor (pos), -1) and p (ceil (pos), -1). It can be derived as an interpolated predicted value in / N pel units.
- p ref may be converted into p 1 and ref before generating the predictive sample value for convenience of calculation.
- the calculated positions of all reference pixels are the maximum range of the available reference pixels. It can be used after it has been converted to values normalized to.
- the position of the reference pixel for generating the prediction value of the arbitrary position (x, y) in the prediction block may be determined as shown in Equation 24 below. Can be.
- the magnitude of the curvature may be adjusted by adjusting the cuv.
- cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the positions of the reference pixels may move downward. Further, as the cuv value decreases, the curvature decreases, and the position of the reference pixels can move upward (up to the position of y).
- cw i may be a parameter including M weights that are the width of the block or the number of columns. Each weight may have a real number greater than or equal to zero.
- cw i the position of the reference pixel used by the prediction pixel included in the corresponding column may be adjusted. For example cw i As the value increases, the positions of the reference pixels used by the prediction pixels in column i th may move downward. Also, cw i As the value decreases, the position of the reference pixels may move upward (up to the position of y).
- Various types of intra prediction may be performed by using a combination of the curvature parameter cuv and / or the weight column parameter cw i .
- FIG. 47 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 46.
- N may be a positive integer.
- the prediction target pixel predSamples [x] [y] may be derived as the reference pixel p (-1, pos).
- predSamples [x] [y] is 1 for p (-1, floor (pos)) and p (-1, ceil (pos)). It can be derived as an interpolated predicted value in / N pel units.
- p ref may be converted into p 1 and ref before generating the predicted sample value.
- the calculated positions of all reference pixels are in the maximum range of the available reference pixels. It can be used after it has been converted to fit-normalized values.
- Equation 25 can be determined.
- the curvature may be adjusted by adjusting the cuv.
- cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the positions of the reference pixels may move upward. In addition, as the cuv value decreases, the curvature decreases, and the position of the reference pixels may move downward (up to the position of y).
- cw i may be a parameter including M weights that are the width of the block or the number of columns. Each weight may have a real number greater than or equal to zero.
- cw i the position of the reference pixel used by the prediction pixel included in the corresponding column may be adjusted. For example cw i As the value increases, the positions of the reference pixels used by the prediction pixels of the column i th may move upward. Also, cw i As the value decreases, the position of the reference pixels may move downward (up to the position of y).
- various types of intra prediction may be performed by using a combination of the curvature parameter cuv and / or the weight column parameter cw i .
- FIG. 49 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 48.
- N may be a positive integer.
- the prediction target pixel predSamples [x] [y] may be derived as the reference pixel p (-1, pos).
- predSamples [x] [y] is 1 for p (-1, floor (pos)) and p (-1, ceil (pos)). It can be derived as an interpolated predicted value in / N pel units.
- p ref may be converted into p 1 and ref before generating the predictive sample value for convenience of calculation.
- the calculated positions of all reference pixels are the maximum range of the available reference pixels. It can be used after it has been converted to values normalized to.
- the position of the reference pixel for generating the prediction value of the arbitrary position (x, y) in the prediction block may be determined as shown in Equation 26 below. Can be.
- the curvature may be adjusted by adjusting the cuv.
- cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the positions of the reference pixels may move to the right. Further, as the cuv value decreases, the curvature decreases, and the position of the reference pixels may move to the left (up to the position of x).
- cw i may be a parameter including N weights that are the height of the block or the number of rows. Each weight may have a real number greater than or equal to zero.
- the position of the reference pixel used by the prediction pixel included in the corresponding row may be adjusted. For example, as the value of cw i increases, the positions of reference pixels used by the prediction pixels of row i th may move to the right. Also, as the cw i value decreases, the position of the reference pixels may move to the left (up to the position of x).
- various types of intra prediction may be performed by using a combination of the curvature parameter cuv and / or the weighted row parameter cw i .
- FIG. 51 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 50.
- N may be a positive integer.
- the prediction target pixel predSamples [x] [y] may be derived to the reference pixel p (pos, -1).
- predSamples [x] [y] is 1 for p (floor (pos), -1) and p (ceil (pos), -1). It can be derived as an interpolated predicted value in / N pel units.
- p ref may be converted into p 1 and ref before generating the predictive sample value for convenience of calculation.
- the calculated positions of all reference pixels are in the maximum range of the available reference pixels. It can be used after it has been converted to fit-normalized values.
- the position of the reference pixel for generating a prediction value of an arbitrary position (x, y) in the prediction block may be determined as shown in Equation 27 below. have.
- the curvature may be adjusted by adjusting the cuv.
- cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the positions of the reference pixels may move to the left. In addition, as the cuv value decreases, the curvature decreases, and the position of the reference pixels may move to the right (up to the position of x).
- cw i may be a parameter including N weights that are the height of the block or the number of rows. Each weight may have a real number greater than or equal to zero.
- the position of the reference pixel used by the prediction pixel included in the corresponding row may be adjusted. For example, as the value of cw i increases, the positions of reference pixels used by the prediction pixels of row i th may move to the left. Also, as the cw i value decreases, the position of the reference pixels may move to the right (up to the position of x).
- various types of intra prediction may be performed by using a combination of the curvature parameter cuv and / or the weighted row parameter cw i .
- cw0 1.0
- cw1 1.4
- cw2 1.8
- cw3 2.2 for a current block having a size of 4x4. It is for the drawing.
- FIG. 53 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 52.
- N may be a positive integer.
- the prediction target pixel predSamples [x] [y] may be derived as p (pos, -1).
- predSamples [x] [y] is 1 for p (floor (pos), -1) and p (ceil (pos), -1). It can be derived as an interpolated predicted value in / N pel units.
- p ref may be converted into p 1 and ref before generating the predictive sample value for convenience of calculation.
- the calculated positions of all reference pixels are the maximum range of the available reference pixels. It can be used after it has been converted to values normalized to.
- the position of the reference pixel for generating the prediction value of the arbitrary position (x, y) in the prediction block may be determined as shown in Equation 28 below. have.
- the magnitude of the curvature may be adjusted by adjusting the cuv.
- cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the position of the reference pixels may move downward. Further, as the cuv value decreases, the curvature decreases, and the position of the reference pixels can move upward (up to the position of y).
- cw i may be a parameter including M weights that are the width of the block or the number of columns. Each weight may have a real number greater than or equal to zero.
- cw i the position of the reference pixel used by the prediction pixel included in the corresponding column may be adjusted. For example, as the value of cw i increases, the positions of the reference pixels used by the prediction pixels of the column i th may move downward. Also, as the cw i value decreases, the position of the reference pixels may move upward (up to the position of y).
- various types of intra prediction may be performed by combining the curvature parameter cuv and the weight column parameter cw i .
- FIG. 55 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 54.
- N may be a positive integer.
- the prediction target pixel predSamples [x] [y] may be derived as the reference pixel p (-1, pos).
- predSamples [x] [y] is 1 for p (-1, floor (pos)) and p (-1, ceil (pos)). It can be derived as an interpolated predicted value in / N pel units.
- p ref may be converted into p 1 and ref before generating the predictive sample value for convenience of calculation.
- the calculated positions of all reference pixels are in the maximum range of the available reference pixels. It can be used after it has been converted to fit-normalized values.
- the position of the reference pixel for generating a prediction value of an arbitrary position (x, y) in the prediction block may be determined as shown in Equation 29 below. Can be.
- the curvature may be adjusted by adjusting the cuv.
- cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the positions of the reference pixels may move upward. Also, as the cuv value decreases, the curvature decreases, and the position of the reference pixels can move downward (up to the position of y).
- cw i may be a parameter including M weights that are the width of the block or the number of columns. Each weight may have a real number greater than or equal to zero.
- cw i the position of the reference pixel used by the prediction pixel included in the corresponding column may be adjusted. For example, as the value of cw i increases, the positions of the reference pixels used by the prediction pixels of the column i th may move upward. In addition, as the value of cw i decreases, the position of the reference pixels may move downward (up to the position of y).
- various types of intra prediction may be performed by combining the curvature parameter cuv and the weight column parameter cw i .
- FIG. 57 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 56.
- N may be a positive integer.
- the prediction target pixel predSamples [x] [y] may be derived as the reference pixel p (-1, pos).
- predSamples [x] [y] is 1 for p (-1, floor (pos)) and p (-1, ceil (pos)). It can be derived as an interpolated predicted value in / N pel units.
- p ref may be converted into p 1 and ref before generating the predictive sample value for convenience of calculation.
- the calculated positions of all reference pixels are the maximum range of the available reference pixels. It can be used after it has been converted to values normalized to.
- one curvature parameter cuv is applied to the current block
- one weight parameter cw is applied to the row or column of the current block.
- one or more curvature parameters cuv i and / or one or more weight parameters cw i may be applied to the current block.
- different curvature parameters may be provided in pixel units, horizontal line units, vertical line units, diagonal line units, right angle line units, sub block units, and / or any pixel group units of the current block.
- cuv i ) and / or weight parameter cw i may be applied.
- FIG. 58 illustrates another embodiment using different directional modes in units of samples in a target block.
- intra-sample prediction may be performed based on the intra prediction mode selected on a block basis.
- the prediction in the sample unit screen may be additionally performed.
- the selected intra prediction mode is a non-directional mode (PLANAR_MODE or DC_MODE)
- PLANAR_MODE a non-directional mode
- DC_MODE DC_MODE
- 59 is a view for explaining an embodiment of predicting a residual signal.
- the residual signal prediction may be additionally performed on the residual signal configured from the intra prediction.
- In-picture prediction predicts the current block using samples of pre-coded / decoded neighboring blocks as reference samples. Therefore, as the distance between the sample of the current block and the reference sample increases, the residual signal tends to increase, which may result in a decrease in coding efficiency.
- prediction of the residual signal may be additionally performed in units of a current block or a sub block.
- a search range may be set for neighboring blocks that are pre-coded / decoded and reconstructed before the current block.
- the search range may be set differently according to the size, shape, split depth, and / or intra prediction mode of the current block.
- all blocks restored before the current block may be set as a search range. If the search range includes blocks located to the left of the current block, blocks located at the top left, blocks located at the top, and / or blocks located at the top right, some areas of the reconstructed block may not be currently encoded or have not yet been encoded. It may include blocks after the current block. In this case, the corresponding sample value may be padded by using the available sample value in the reconstruction block, or the blocks may be excluded from the search range.
- N blocks among the blocks restored before the current block may be set as a search range.
- N may be a positive integer of 1 or more.
- the horizontal length of the current block CUR_BLK is W
- the vertical length is H
- the position of the upper left pixel of the current block is defined as (0, 0), (-2 * W, -2 * H), (-W, -2 * H), (0, -2 * H), (W, -2 * H), (-2 * W, -H), (-W 10 reconstruction blocks containing pixels at positions (-H), (0, -H), (W, -H), (-2 * W, 0), (-W, 0) Can be.
- the search range may be set depending on the W and / or H values.
- the search range may be set to (K * W) x (L * H) in the reconstructed adjacent blocks area.
- K and L may each be a positive integer of 1 or more.
- the prediction block of the current block may be configured by using the intra prediction mode (predModeIntra) of the current block determined by performing the intra prediction among the aforementioned various intra prediction modes.
- predModeIntra intra prediction mode of the current block determined by performing the intra prediction among the aforementioned various intra prediction modes.
- a prediction block configured using predModeIntra may be represented as PRD_BLK_best.
- one or more prediction blocks of the current block may be configured.
- At least one additional prediction block may be configured using at least one of prediction modes in all directional / non-directional pictures.
- an additional prediction block may be configured using N intra prediction modes adjacent to predModeIntra based on predModeIntra.
- N may be a positive integer of 1 or more.
- two additional prediction blocks PRD_BLK_plus_one and PRD_BLK_minus_one may be configured.
- PRD_BLK_plus_one when predModeIntra is a directional mode, an additional prediction block (PRD_BLK_plus_one) may be configured using predModeIntra + 1, and another additional prediction block may be configured using predModeIntra-1.
- the number added to or subtracted from the predModeIntra may be a positive integer of 1 or more.
- an additional prediction block may be configured using N adjacent intra prediction modes based on an angle formed with predModeIntra.
- N may be a positive integer of 1 or more.
- the additional prediction block may be configured by using the intra prediction mode included in the ⁇ angle range from the predModeIntra reference ⁇ to + ⁇ .
- M additional prediction blocks may be configured by combining N additional prediction blocks configured using N intra picture modes.
- M and N may be a positive integer.
- predModeIntra is PLANAR_MODE, which is a non-directional mode
- an additional prediction block PRD_BLK_plus_one may be configured using DC_MODE
- another additional prediction block PRD_BLK_minus_one may be configured by a weighted sum of PRD_BLK_best and PRD_BLK_plus_one.
- an additional prediction block PRD_BLK_plus_one may be configured using PLANAR_MODE, and another additional prediction block PRD_BLK_minus_one may be configured by a weighted sum of PRD_BLK_best and PRD_BLK_plus_one.
- predModeIntra is ANGULAR_MODE, which is a directional mode
- an additional prediction block PRD_BLK_plus_one may be configured using ANGULAR_MODE
- another additional prediction block PRD_BLK_minus_one may be configured by a weighted sum of PRD_BLK_best and PRD_BLK_plus_one.
- a plurality of difference blocks may be obtained using at least one of the current block and the configured plurality of prediction blocks.
- the differential blocks between the N + 1 prediction blocks and the current block configured by using N intra prediction modes adjacent to predModeIntra based on predModeIntra and an angle or intra prediction mode may be configured.
- N may be a positive integer of 1 or more.
- three difference blocks can be configured as follows.
- the difference block RES_BLK_best between the current block and PRD_BLK_best can be obtained.
- the difference block RES_BLK_plusone between the current block and PRD_BLK_plus_one can be obtained.
- the difference block RES_BLK_minusone between the current block and PRD_BLK_minus_one can be obtained.
- N additional prediction blocks are constructed using N intra-picture modes
- M additional prediction blocks are constructed from the combination of N predicted blocks (where M and N are positive integers). It is possible to configure difference blocks between the prediction blocks and the current block.
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Abstract
The present invention relates to an image encoding/decoding method and device. An image decoding method for performing an intra-frame prediction for a current block, according to the present invention, may comprise the steps of: decoding first information indicating whether a residual signal prediction for predicting a residual block of the current block is performed; and performing the residual signal prediction when the first information indicates a first value.
Description
본 발명은 영상 부호화/복호화 방법 및 장치에 관한 것이다. 구체적으로, 본 발명은 화면 내 예측을 이용한 영상 부호화/복호화 방법, 장치 및 본 발명의 영상 부호화 방법/장치에 의해 생성된 비트스트림을 저장한 기록 매체에 관한 것이다.The present invention relates to a method and apparatus for image encoding / decoding. Specifically, the present invention relates to a video encoding / decoding method and apparatus using intra picture prediction, and a recording medium storing a bitstream generated by the video encoding method / apparatus of the present invention.
최근 HD(High Definition) 영상 및 UHD(Ultra High Definition) 영상과 같은 고해상도, 고품질의 영상에 대한 수요가 다양한 응용 분야에서 증가하고 있다. 영상 데이터가 고해상도, 고품질이 될수록 기존의 영상 데이터에 비해 상대적으로 데이터량이 증가하기 때문에 기존의 유무선 광대역 회선과 같은 매체를 이용하여 영상 데이터를 전송하거나 기존의 저장 매체를 이용해 저장하는 경우, 전송 비용과 저장 비용이 증가하게 된다. 영상 데이터가 고해상도, 고품질화 됨에 따라 발생하는 이러한 문제들을 해결하기 위해서는 더 높은 해상도 및 화질을 갖는 영상에 대한 고효율 영상 부호화(encoding)/복호화(decoding) 기술이 요구된다. Recently, the demand for high resolution and high quality images such as high definition (HD) and ultra high definition (UHD) images is increasing in various applications. As the video data becomes higher resolution and higher quality, the amount of data increases relative to the existing video data. Therefore, when the video data is transmitted or stored using a medium such as a conventional wired / wireless broadband line, The storage cost will increase. In order to solve these problems caused by high resolution and high quality image data, a high efficiency image encoding / decoding technique for an image having a higher resolution and image quality is required.
영상 압축 기술로 현재 픽처의 이전 또는 이후 픽처로부터 현재 픽처에 포함된 화소값을 예측하는 화면 간 예측 기술, 현재 픽처 내의 화소 정보를 이용하여 현재 픽처에 포함된 화소값을 예측하는 화면 내 예측 기술, 잔여 신호의 에너지를 압축하기 위한 변환 및 양자화 기술, 출현 빈도가 높은 값에 짧은 부호를 할당하고 출현 빈도가 낮은 값에 긴 부호를 할당하는 엔트로피 부호화 기술 등 다양한 기술이 존재하고 이러한 영상 압축 기술을 이용해 영상 데이터를 효과적으로 압축하여 전송 또는 저장할 수 있다. An inter-screen prediction technique for predicting pixel values included in the current picture from a picture before or after the current picture using an image compression technology, an intra-picture prediction technology for predicting pixel values included in the current picture using pixel information in the current picture, There are various techniques such as transformation and quantization techniques for compressing the energy of the residual signal, entropy coding technique for assigning short codes to high-frequency values and long codes for low-frequency values. Image data can be effectively compressed and transmitted or stored.
본 발명은 압축 효율이 향상된 영상 부호화/복호화 방법, 장치 및 본 발명의 영상 부호화 방법/장치에 의해 생성된 비트스트림을 저장한 기록 매체를 제공하는 것을 목적으로 한다.An object of the present invention is to provide a video encoding / decoding method and apparatus having improved compression efficiency, and a recording medium storing a bitstream generated by the video encoding method / apparatus of the present invention.
또한, 본 발명은 압축 효율이 향상된 화면 내 예측을 이용한 영상 부호화/복호화 방법, 장치 및 본 발명의 영상 부호화 방법/장치에 의해 생성된 비트스트림을 저장한 기록 매체를 제공하는 것을 목적으로 한다.Another object of the present invention is to provide a video encoding / decoding method and apparatus using intra picture prediction with improved compression efficiency, and a recording medium storing a bitstream generated by the video encoding method and apparatus of the present invention.
또한, 본 발명은 잔차 신호 예측을 이용한 화면 내 예측을 수행하는 영상 영상 부호화/복호화 방법, 장치 및 본 발명의 영상 부호화 방법/장치에 의해 생성된 비트스트림을 저장한 기록 매체를 제공하는 것을 목적으로 한다.In addition, an object of the present invention is to provide a video image encoding / decoding method, apparatus for performing intra prediction using residual signal prediction, and a recording medium storing a bitstream generated by the video encoding method / apparatus of the present invention. do.
본 발명에 따른 현재 블록에 대해 화면 내 예측을 수행하는 영상 복호화 방법은, 상기 현재 블록의 잔차 블록을 예측하기 위한 잔차 신호 예측이 수행되는지 여부를 지시하는 제1정보를 복호화하는 단계, 및 상기 제1정보가 제1값을 지시하는 경우, 상기 잔차 신호 예측을 수행하는 단계를 포함할 수 있다.An image decoding method for performing intra prediction on a current block according to the present invention includes: decoding first information indicating whether residual signal prediction for predicting a residual block of the current block is performed; If the first information indicates a first value, the method may include performing the residual signal prediction.
본 발명의 영상 복호화 방법에 있어서, 상기 잔차 신호 예측은 기복호화된 복원 블록에 기초하여 수행될 수 있다.In the image decoding method of the present invention, the residual signal prediction may be performed based on a decoded reconstruction block.
본 발명의 영상 복호화 방법은, IDV(Inta Displacement Vector)를 복호화하는 단계를 더 포함하고, 상기 기복호화된 복원 블록은 상기 복호화된 IDV에 의해 특정될 수 있다.The image decoding method of the present invention further includes decoding an IDV (Inta Displacement Vector), and the decoded reconstruction block may be specified by the decoded IDV.
본 발명의 영상 복호화 방법은, 상기 잔차 신호 예측에 이용된 화면 내 예측 모드를 복호화하는 단계, 및 상기 복호화된 화면 내 예측 모드에 기초하여, 상기 복원 블록의 예측 블록을 생성하는 단계를 더 포함할 수 있다.The image decoding method of the present invention may further include decoding an intra prediction mode used for the residual signal prediction, and generating a prediction block of the reconstructed block based on the decoded intra prediction mode. Can be.
본 발명의 영상 복호화 방법은, 상기 복원 블록 및 상기 복원 블록의 예측 블록에 기초하여, 상기 복원 블록의 잔차 블록을 생성하는 단계를 더 포함하고, 상기 복원 블록의 잔차 블록은 상기 현재 블록의 잔차 블록의 예측 블록일 수 있다.The image decoding method of the present invention further includes generating a residual block of the reconstructed block based on the reconstructed block and the prediction block of the reconstructed block, wherein the residual block of the reconstructed block is a residual block of the current block. It may be a prediction block of.
본 발명의 영상 복호화 방법은, 상기 현재 블록의 2차 잔차 블록을 복호화하는 단계, 및 상기 현재 블록의 잔차 블록의 예측 블록 및 상기 2차 잔차 블록에 기초하여, 상기 현재 블록의 잔차 블록을 생성하는 단계를 더 포함할 수 있다.The image decoding method of the present invention may further include decoding a secondary residual block of the current block, and generating a residual block of the current block based on the prediction block and the secondary residual block of the residual block of the current block. It may further comprise a step.
본 발명의 영상 복호화 방법에 있어서, 상기 IDV에 관한 정보가 비트스트림에 포함되지 않은 경우, 상기 IDV를 복호화하는 단계는, 소정의 검색 방법을 이용하여, 소정의 검색 범위 내에 포함된 복수의 IDV 중 하나를 선택함으로써 수행될 수 있다.In the video decoding method of the present invention, when the information on the IDV is not included in the bitstream, the decoding of the IDV may be performed by using a predetermined search method, among a plurality of IDVs included in the predetermined search range. This can be done by selecting one.
본 발명의 영상 복호화 방법에 있어서, 상기 소정의 검색 방법은 영상 부호화 방법에서 사용된 것과 동일한 검색 방법일 수 있다.In the video decoding method of the present invention, the predetermined search method may be the same search method used in the video encoding method.
본 발명에 따른 현재 블록에 대해 화면 내 예측을 수행하는 화면 내 예측부를 포함하는 영상 복호화 장치는, 상기 현재 블록의 잔차 블록을 예측하기 위한 잔차 신호 예측이 수행되는지 여부를 지시하는 제1정보를 복호화하고, 상기 제1정보가 제1값을 지시하는 경우, 상기 잔차 신호 예측을 수행하는 화면 내 예측부를 포함할 수 있다.An image decoding apparatus including an intra picture prediction unit that performs an intra picture prediction on a current block according to the present invention, decodes first information indicating whether residual signal prediction for predicting a residual block of the current block is performed. When the first information indicates the first value, the first information may include an intra prediction unit configured to perform the residual signal prediction.
본 발명에 따른 현재 블록에 대해 화면 내 예측을 수행하는 영상 부호화 방법은, 상기 현재 블록의 잔차 블록을 예측하기 위한 잔차 신호 예측을 수행하는 단계, 및 상기 잔차 신호 예측이 수행되는지 여부를 지시하는 제1정보를 부호화하는 단계를 포함할 수 있다.An image encoding method for performing intra prediction on a current block according to the present invention may include performing residual signal prediction for predicting a residual block of the current block, and indicating whether the residual signal prediction is performed. 1 may include encoding the information.
본 발명의 영상 부호화 방법에 있어서, 상기 잔차 신호 예측은 기복호화된 복원 블록에 기초하여 수행될 수 있다.In the image encoding method of the present invention, the residual signal prediction may be performed based on a decoded reconstruction block.
본 발명의 영상 부호화 방법은, 상기 기복호화된 복원 블록을 특정하는 IDV(Inta Displacement Vector)를 부호화하는 단계를 더 포함할 수 있다. The image encoding method of the present invention may further include encoding an IDV (Inta Displacement Vector) that specifies the decoded reconstruction block.
본 발명의 영상 부호화 방법은, 상기 잔차 신호 예측에 이용되는 화면 내 예측 모드를 결정하는 단계, 상기 결정된 화면 내 예측 모드에 기초하여, 상기 복원 블록의 예측 블록을 생성하는 단계, 및 상기 결정된 화면 내 예측 모드를 부호화하는 단계를 더 포함할 수 있다.The image encoding method of the present invention may include determining an intra prediction mode used for the residual signal prediction, generating a prediction block of the reconstructed block based on the determined intra prediction mode, and determining the intra intra prediction mode. The method may further include encoding the prediction mode.
본 발명의 영상 부호화 방법에 있어서, 상기 소정의 검색 방법은, 상기 현재 블록의 잔차 블록의 비용 함수 값과 상기 현재 블록의 2차 잔차 블록의 비용 함수 값을 비교하는 단계를 포함할 수 있다.In the image encoding method of the present invention, the predetermined search method may include comparing a cost function value of a residual block of the current block with a cost function value of a secondary residual block of the current block.
본 발명에 따른 현재 블록에 대해 화면 내 예측을 수행하는 화면 내 예측부를 포함하는 영상 부호화 장치는, 상기 현재 블록의 잔차 블록을 예측하기 위한 잔차 신호 예측을 수행하고, 상기 잔차 신호 예측이 수행되는지 여부를 지시하는 제1정보를 부호화하는 화면 내 예측부를 포함할 수 있다.An image encoding apparatus including an intra picture prediction unit that performs an intra picture prediction on a current block according to the present invention, performs a residual signal prediction for predicting a residual block of the current block, and determines whether the residual signal prediction is performed. It may include an intra prediction unit for encoding the first information indicating the.
본 발명에 따른 현재 블록에 대해 화면 내 예측을 수행하는 영상 부호화 방법에 의해 생성된 비트스트림을 저장한 기록 매체는, 상기 현재 블록의 잔차 블록을 예측하기 위한 잔차 신호 예측을 수행하는 단계, 및 상기 잔차 신호 예측이 수행되는지 여부를 지시하는 제1정보를 부호화하는 단계를 포함하는 영상 부호화 방법에 의해 생성된 비트스트림을 저장할 수 있다.A recording medium storing a bitstream generated by an image encoding method for performing intra prediction on a current block according to the present invention, the method comprising: performing a residual signal prediction for predicting a residual block of the current block; and A bitstream generated by an image encoding method may include storing first information indicating whether residual signal prediction is performed.
본 발명에 따르면, 압축 효율이 향상된 영상 부호화/복호화 방법, 장치 및 본 발명의 영상 부호화 방법/장치에 의해 생성된 비트스트림을 저장한 기록 매체가 제공될 수 있다.According to the present invention, there can be provided a video encoding / decoding method and apparatus having improved compression efficiency, and a recording medium storing a bitstream generated by the video encoding method / device of the present invention.
또한, 본 발명에 따르면, 압축 효율이 향상된 화면 내 예측을 이용한 영상 부호화/복호화 방법, 장치 및 본 발명의 영상 부호화 방법/장치에 의해 생성된 비트스트림을 저장한 기록 매체가 제공될 수 있다.According to the present invention, there can be provided a video encoding / decoding method and apparatus using intra picture prediction with improved compression efficiency, and a recording medium storing a bitstream generated by the video encoding method / device of the present invention.
또한, 본 발명에 따르면, 잔차 신호 예측을 이용한 화면 내 예측을 수행하는 영상 영상 부호화/복호화 방법, 장치 및 본 발명의 영상 부호화 방법/장치에 의해 생성된 비트스트림을 저장한 기록 매체가 제공될 수 있다.Further, according to the present invention, there can be provided a video image encoding / decoding method, apparatus for performing intra prediction using residual signal prediction, and a recording medium storing a bitstream generated by the video encoding method / device of the present invention. have.
도 1은 본 발명이 적용되는 부호화 장치의 일 실시예에 따른 구성을 나타내는 블록도이다.1 is a block diagram illustrating a configuration of an encoding apparatus according to an embodiment of the present invention.
도 2는 본 발명이 적용되는 복호화 장치의 일 실시예에 따른 구성을 나타내는 블록도이다.2 is a block diagram illustrating a configuration of a decoding apparatus according to an embodiment of the present invention.
도 3은 영상을 부호화 및 복호화할 때의 영상의 분할 구조를 개략적으로 나타내는 도면이다.3 is a diagram schematically illustrating a division structure of an image when encoding and decoding an image.
도 4는 부호화 유닛(CU)이 포함할 수 있는 예측 유닛(PU)의 형태를 도시한 도면이다.FIG. 4 is a diagram illustrating a form of a prediction unit PU that may be included in the coding unit CU.
도 5는 부호화 유닛(CU)이 포함할 수 있는 변환 유닛(TU)의 형태를 도시한 도면이다.FIG. 5 is a diagram illustrating a form of a transform unit (TU) that a coding unit CU may include.
도 6은 화면 내 예측 과정의 실시예를 설명하기 위한 도면이다.6 is a diagram for explaining an embodiment of an intra prediction process.
도 7은 화면 간 예측 과정의 실시예를 설명하기 위한 도면이다.7 is a diagram for explaining an embodiment of an inter prediction process.
도 8은 화면 내 예측 모드에 따른 변환 세트를 설명하기 위한 도면이다.8 is a diagram for describing a transform set according to an intra prediction mode.
도 9는 변환의 과정을 설명하기 위한 도면이다.9 is a view for explaining the process of the conversion.
도 10은 양자화된 변환 계수의 스캐닝을 설명하기 위한 도면이다.10 is a diagram for describing scanning of quantized transform coefficients.
도 11은 블록 분할을 설명하기 위한 도면이다.11 is a diagram for explaining block division.
도 12는 본 발명의 일 실시예에 따라, 현재 블록에 대해 화면 내 예측을 수행하는 방법을 설명하기 위한 도면이다.12 is a diagram for describing a method of performing intra prediction on a current block according to an embodiment of the present invention.
도 13은 주변 블록으로부터 현재 블록의 화면 내 예측 모드를 유도하는 방법을 설명하기 위한 도면이다.FIG. 13 is a diagram for describing a method of deriving an intra prediction mode of a current block from a neighboring block.
도 14는 현재 블록, 상위 블록 및 인접 블록을 설명하기 위한 예시도이다.14 is an exemplary diagram for describing a current block, an upper block, and an adjacent block.
도 15는 색 성분간 비율이 4:2:0인 경우의 휘도 블록과 색차 블록을 도시한 예시도이다.15 is an exemplary diagram illustrating a luminance block and a color difference block when the ratio between color components is 4: 2: 0.
도 16은 현재 블록이 하나 이상의 서브 블록으로 분할되어 각 서브 블록의 화면 내 예측 모드를 유도하는 실시예를 설명하기 위한 도면이다. FIG. 16 is a diagram for describing an embodiment in which a current block is divided into one or more subblocks to derive an intra prediction mode of each subblock.
도 17은 현재 블록이 서브 블록으로 분할되는 하나의 실시예를 도시한 도면이다.FIG. 17 is a diagram illustrating an embodiment in which a current block is divided into sub blocks.
도 18은 현재 블록이 서브 블록으로 분할되는 다른 실시예를 도시한 도면이다.18 illustrates another embodiment in which a current block is divided into sub blocks.
도 19는 현재 블록이 서브 블록으로 분할되는 또 다른 실시예를 도시한 도면이다.19 illustrates another embodiment in which a current block is divided into subblocks.
도 20은 현재 블록이 서브 블록으로 분할되는 또 다른 실시예를 도시한 도면이다.20 is a diagram illustrating another embodiment in which a current block is divided into sub blocks.
도 21은 시드 위치 화면 내 예측 모드를 이용하여 현재 블록의 화면 내 예측 모드를 유도하는 일 실시예를 설명하기 위한 도면이다.FIG. 21 is a diagram illustrating an example of deriving an intra prediction mode of a current block by using an intra prediction mode.
도 22는 2개의 SPIPM을 포함하는 SPIPM 리스트를 구성하는 일 실시예를 도시한 도면이다. FIG. 22 is a diagram illustrating an embodiment of constructing a SPIPM list including two SPIPMs.
도 23은 3개의 SPIPM을 포함하는 SPIPM 리스트를 구성하는 일 실시예를 도시한 도면이다. FIG. 23 is a diagram illustrating an embodiment of configuring a SPIPM list including three SPIPMs.
도 24는 4개의 SPIPM을 포함하는 SPIPM 리스트를 구성하는 일 실시예를 도시한 도면이다. FIG. 24 is a diagram illustrating an embodiment of constructing a SPIPM list including four SPIPMs.
도 25는 현재 블록의 크기가 16x16일 경우, 서브 블록의 크기를 예시적으로 도시한 도면이다. FIG. 25 is a diagram exemplarily illustrating a size of a sub block when the size of a current block is 16 × 16.
도 26은 결정된 IPDF를 이용하여 화면 내 예측 모드를 할당하는 일 실시예를 설명하기 위한 도면이다.FIG. 26 illustrates an example of allocating an intra prediction mode using the determined IPDF.
도 27은 현재 블록의 인접 복원 블록들을 예시적으로 도시한 도면이다.27 is a diagram exemplarily illustrating adjacent reconstructed blocks of a current block.
도 28은 인접 복원 블록들을 이용하여 화면 내 예측 모드를 유도하는 실시예를 설명하기 위한 도면이다.FIG. 28 is a diagram for describing an embodiment of deriving an intra prediction mode using adjacent reconstruction blocks.
도 29는 서브 블록 단위의 화면 내 예측 모드를 유도하는 실시예를 설명하기 위한 도면이다.FIG. 29 is a diagram for describing an embodiment of deriving an intra prediction mode on a sub-block basis.
도 30은 서브 블록 단위의 화면 내 예측 모드를 유도하는 다른 실시예를 설명하기 위한 도면이다.FIG. 30 is a diagram for describing another embodiment of deriving an intra prediction mode on a sub-block basis.
도 31은 화면 내 예측 모드에 관한 정보를 포함하는 신택스 구조를 예시한 도면이다.31 is a diagram illustrating a syntax structure including information about an intra prediction mode.
도 32는 현재 블록의 화면 내 예측에 이용될 수 있는 주변의 복원 샘플 라인들을 예시적으로 도시한 도면이다.32 is a diagram illustrating surrounding reconstructed sample lines that may be used for in-picture prediction of a current block.
도 33은 현재 블록에 포함된 서브 블록에 대해 참조 샘플을 구성하는 실시예를 설명하기 위한 도면이다.33 is a diagram for describing an embodiment of configuring a reference sample for a subblock included in a current block.
도 34는 가용한 복원 샘플을 이용하여 가용하지 않은 복원 샘플을 대체하는 방법을 설명하기 위한 도면이다.FIG. 34 is a diagram for describing a method of replacing an unavailable restoration sample by using an available restoration sample.
도 35는 필터링 여부를 결정하기 위한 블록 사이즈 별 임계값을 예시적으로 나타낸 도면이다.35 is a diagram illustrating a threshold for each block size for determining whether to filter.
도 36은 블록 사이즈 및/또는 화면 내 예측 모드에 따른 필터링 수행 여부를 예시적으로 도시한 도면이다.36 is a diagram exemplarily illustrating whether filtering is performed according to a block size and / or an intra prediction mode.
도 37은 현재 블록의 형태에 따른 화면 내 예측을 설명하기 위한 예시도이다.37 is an exemplary diagram for describing intra prediction according to a shape of a current block.
도 38은 DC 모드의 화면 내 예측 시의 필터링을 설명하기 위한 도면이다.FIG. 38 is a diagram for describing filtering during intra prediction in a DC mode. FIG.
도 39는 Planar 모드의 화면 내 예측을 설명하기 위한 도면이다.39 is a diagram for describing intra prediction in a planar mode.
도 40은 Pref로부터 참조 샘플의 1차원 배열(1-D reference sample array, p1, ref)을 생성하는 일 실시예를 설명하기 위한 도면이다.40 is a view for explaining one embodiment of generating a one-dimensional array (1-D reference sample array, p 1, ref) of the reference sample from P ref.
도 41은 예측 블록 내의 샘플 위치에 따라 다른 각도의 참조 샘플을 이용하는 실시예를 설명하기 위한 도면이다.FIG. 41 is a view for explaining an embodiment using reference samples of different angles according to sample positions in a prediction block.
도 42는 4x4 크기의 현재 블록에 대해 cuv=0.1, cw0=1.0, cw1=1.2, cw2=1.4, cw3=1.6를 적용하여, 우상단에서 좌하단 방향으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.42 is a diagram illustrating a prediction from the upper right to the lower left by applying cuv = 0.1, cw 0 = 1.0, cw 1 = 1.2, cw 2 = 1.4, and cw 3 = 1.6 for a current block having a size of 4x4. It is a figure for demonstrating an example.
도 43은 도 42의 cuv 및 cwi를 적용한 결과, 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다.FIG. 43 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 42.
도 44는 4x4 크기의 현재 블록에 대해 cuv=0.1, cw0=1.0, cw1=1.2, cw2=1.4, cw3=1.6를 적용하여, 좌상단에서 우하단 방향(type-1)으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.44 shows the prediction from the upper left to the lower right direction (type-1) by applying cuv = 0.1, cw 0 = 1.0, cw 1 = 1.2, cw 2 = 1.4, and cw 3 = 1.6 for the current block having a size of 4x4. A diagram for describing an embodiment of performing the present invention.
도 45은 도 44의 cuv 및 cwi를 적용한 결과, 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다.FIG. 45 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 44.
도 46은 4x4 크기의 현재 블록에 대해 cuv=0.1, cw0=1.0, cw1=1.2, cw2=1.4, cw3=1.6를 적용하여, 좌하단에서 우상단 방향으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.FIG. 46 illustrates an embodiment of performing prediction from the lower left to the upper right by applying cuv = 0.1, cw0 = 1.0, cw1 = 1.2, cw2 = 1.4, and cw3 = 1.6 for a current block having a size of 4x4. It is for the drawing.
도 47은 도 46의 cuv 및 cwi를 적용한 결과, 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다. FIG. 47 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 46.
도 48은 4x4 크기의 현재 블록에 대해 cuv=0.1, cw0=1.0, cw1=1.2, cw2=1.4, cw3=1.6를 적용하여, 좌상단에서 우하단 (type-2) 방향으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.FIG. 48 illustrates the prediction from the upper left to the lower right (type-2) directions by applying cuv = 0.1, cw0 = 1.0, cw1 = 1.2, cw2 = 1.4, and cw3 = 1.6 for a 4 × 4 current block. It is a figure for demonstrating an Example.
도 49는 도 48의 cuv와 cwi를 적용한 결과, 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다.FIG. 49 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 48.
도 50은 4x4 크기의 현재 블록에 대해 cuv=0.6, cw0=1.0, cw1=1.4, cw2=1.8, cw3=2.2를 적용하여, 상단에서 좌하단 방향으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.FIG. 50 illustrates an embodiment of performing prediction from the top to the bottom left by applying cuv = 0.6, cw0 = 1.0, cw1 = 1.4, cw2 = 1.8, and cw3 = 2.2 for a 4 × 4 current block. It is for the drawing.
도 51은 도 50의 cuv와 cwi를 적용한 결과 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다.FIG. 51 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 50.
도 52는 4x4 크기의 현재 블록에 대해 cuv=0.6, cw0=1.0, cw1=1.4, cw2=1.8, cw3=2.2를 적용하여, 상단에서 우하단 방향으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.52 is a diagram for describing an embodiment of performing prediction from the top to the bottom right by applying cuv = 0.6, cw0 = 1.0, cw1 = 1.4, cw2 = 1.8, and cw3 = 2.2 for a current block having a size of 4x4. It is for the drawing.
도 53은 도 52의 cuv와 cwi를 적용한 결과, 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다.FIG. 53 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 52.
도 54는 4x4 크기의 현재 블록에 대해 cuv=0.6 cw0=1.0, cw1=1.4, cw2=1.8, cw3=2.2를 적용하여, 좌측에서 우상단 방향으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.FIG. 54 is a diagram for explaining an embodiment of performing prediction from the left to the upper right direction by applying cuv = 0.6 cw0 = 1.0, cw1 = 1.4, cw2 = 1.8, and cw3 = 2.2 to a 4 × 4 current block. to be.
도 55는 도 54의 cuv와 cwi를 적용한 결과, 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다.FIG. 55 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 54.
도 56은 4x4 크기의 현재 블록에 대해 cuv=0.6, cw0=1.0, cw1=1.4, cw2=1.8, cw3=2.2를 적용하여, 좌측에서 우하단 방향으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.56 illustrates an embodiment of performing prediction from left to right bottom by applying cuv = 0.6, cw0 = 1.0, cw1 = 1.4, cw2 = 1.8, and cw3 = 2.2 for a 4 × 4 current block. It is for the drawing.
도 57은 도 56의 cuv와 cwi를 적용한 결과, 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다.FIG. 57 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 56.
도 58은 대상 블록 내의 샘플 단위로 서로 다른 방향성 모드를 이용하는 또 다른 실시예를 설명하기 위한 도면이다.FIG. 58 illustrates another embodiment using different directional modes in units of samples in a target block.
도 59는 잔차 신호를 예측하는 실시예를 설명하기 위한 도면이다.59 is a view for explaining an embodiment of predicting a residual signal.
도 60은 2차 잔차 신호 블록을 이용한 잔차 신호의 예측을 설명하기 위한 도면이다.60 is a diagram for explaining prediction of a residual signal using a secondary residual signal block.
도 61은 잔차 신호 예측의 일 실시예를 설명하기 위한 도면이다. 61 is a diagram to describe an embodiment of a residual signal prediction.
도 62는 부호화기에서 잔차 신호 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.62 is a diagram for explaining an embodiment of performing a residual signal prediction in an encoder.
도 63은 복호화기에서 잔차 신호 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.63 is a diagram for explaining an embodiment of performing residual signal prediction in a decoder.
본 발명은 다양한 변경을 가할 수 있고 여러 가지 실시예를 가질 수 있는 바, 특정 실시예들을 도면에 예시하고 상세한 설명에 상세하게 설명하고자 한다. 그러나, 이는 본 발명을 특정한 실시 형태에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변경, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다. 도면에서 유사한 참조부호는 여러 측면에 걸쳐서 동일하거나 유사한 기능을 지칭한다. 도면에서의 요소들의 형상 및 크기 등은 보다 명확한 설명을 위해 과장될 수 있다. 후술하는 예시적 실시예들에 대한 상세한 설명은, 특정 실시예를 예시로서 도시하는 첨부 도면을 참조한다. 이들 실시예는 당업자가 실시예를 실시할 수 있기에 충분하도록 상세히 설명된다. 다양한 실시예들은 서로 다르지만 상호 배타적일 필요는 없음이 이해되어야 한다. 예를 들어, 여기에 기재되어 있는 특정 형상, 구조 및 특성은 일 실시예에 관련하여 본 발명의 정신 및 범위를 벗어나지 않으면서 다른 실시예로 구현될 수 있다. 또한, 각각의 개시된 실시예 내의 개별 구성요소의 위치 또는 배치는 실시예의 정신 및 범위를 벗어나지 않으면서 변경될 수 있음이 이해되어야 한다. 따라서, 후술하는 상세한 설명은 한정적인 의미로서 취하려는 것이 아니며, 예시적 실시예들의 범위는, 적절하게 설명된다면, 그 청구항들이 주장하는 것과 균등한 모든 범위와 더불어 첨부된 청구항에 의해서만 한정된다.As the invention allows for various changes and numerous embodiments, particular embodiments will be illustrated in the drawings and described in detail in the written description. However, this is not intended to limit the present invention to specific embodiments, it should be understood to include all modifications, equivalents, and substitutes included in the spirit and scope of the present invention. Like reference numerals in the drawings refer to the same or similar functions throughout the several aspects. Shape and size of the elements in the drawings may be exaggerated for clarity. DETAILED DESCRIPTION For the following detailed description of exemplary embodiments, reference is made to the accompanying drawings that show, by way of illustration, specific embodiments. These embodiments are described in sufficient detail to enable those skilled in the art to practice the embodiments. It should be understood that the various embodiments are different but need not be mutually exclusive. For example, certain shapes, structures, and characteristics described herein may be embodied in other embodiments without departing from the spirit and scope of the invention with respect to one embodiment. In addition, it is to be understood that the location or arrangement of individual components within each disclosed embodiment may be changed without departing from the spirit and scope of the embodiments. The following detailed description, therefore, is not to be taken in a limiting sense, and the scope of the exemplary embodiments, if properly described, is defined only by the appended claims, along with the full scope of equivalents to which such claims are entitled.
본 발명에서 제1, 제2 등의 용어는 다양한 구성요소들을 설명하는데 사용될 수 있지만, 상기 구성요소들은 상기 용어들에 의해 한정되어서는 안 된다. 상기 용어들은 하나의 구성요소를 다른 구성요소로부터 구별하는 목적으로만 사용된다. 예를 들어, 본 발명의 권리 범위를 벗어나지 않으면서 제1 구성요소는 제2 구성요소로 명명될 수 있고, 유사하게 제2 구성요소도 제1 구성요소로 명명될 수 있다. 및/또는 이라는 용어는 복수의 관련된 기재된 항목들의 조합 또는 복수의 관련된 기재된 항목들 중의 어느 항목을 포함한다.In the present invention, terms such as first and second may be used to describe various components, but the components should not be limited by the terms. The terms are used only for the purpose of distinguishing one component from another. For example, without departing from the scope of the present invention, the first component may be referred to as the second component, and similarly, the second component may also be referred to as the first component. The term and / or includes a combination of a plurality of related items or any item of a plurality of related items.
본 발명의 어떤 구성 요소가 다른 구성 요소에 “연결되어” 있다거나 “접속되어” 있다고 언급된 때에는, 그 다른 구성 요소에 직접적으로 연결되어 있거나 또는 접속되어 있을 수도 있으나, 중간에 다른 구성 요소가 존재할 수도 있다고 이해되어야 할 것이다. 반면에, 어떤 구성요소가 다른 구성요소에 "직접 연결되어"있다거나 "직접 접속되어"있다고 언급된 때에는, 중간에 다른 구성요소가 존재하지 않는 것으로 이해되어야 할 것이다.When any component of the invention is said to be “connected” or “connected” to another component, it may be directly connected to or connected to that other component, but other components may be present in between. It should be understood that it may. On the other hand, when a component is referred to as being "directly connected" or "directly connected" to another component, it should be understood that there is no other component in between.
본 발명의 실시예에 나타나는 구성부들은 서로 다른 특징적인 기능들을 나타내기 위해 독립적으로 도시되는 것으로, 각 구성부들이 분리된 하드웨어나 하나의 소프트웨어 구성단위로 이루어짐을 의미하지 않는다. 즉, 각 구성부는 설명의 편의상 각각의 구성부로 나열하여 포함한 것으로 각 구성부 중 적어도 두 개의 구성부가 합쳐져 하나의 구성부로 이루어지거나, 하나의 구성부가 복수 개의 구성부로 나뉘어져 기능을 수행할 수 있고 이러한 각 구성부의 통합된 실시예 및 분리된 실시예도 본 발명의 본질에서 벗어나지 않는 한 본 발명의 권리범위에 포함된다.The components shown in the embodiments of the present invention are shown independently to represent different characteristic functions, and do not mean that each component is made of separate hardware or one software component unit. In other words, each component is included in each component for convenience of description, and at least two of the components may be combined into one component, or one component may be divided into a plurality of components to perform a function. Integrated and separate embodiments of the components are also included within the scope of the present invention without departing from the spirit of the invention.
본 발명에서 사용한 용어는 단지 특정한 실시예를 설명하기 위해 사용된 것으로, 본 발명을 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 발명에서, "포함하다" 또는 "가지다" 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다. 즉, 본 발명에서 특정 구성을 “포함”한다고 기술하는 내용은 해당 구성 이외의 구성을 배제하는 것이 아니며, 추가적인 구성이 본 발명의 실시 또는 본 발명의 기술적 사상의 범위에 포함될 수 있음을 의미한다. The terminology used herein is for the purpose of describing particular example embodiments only and is not intended to be limiting of the present invention. Singular expressions include plural expressions unless the context clearly indicates otherwise. In the present invention, the terms "comprise" or "have" are intended to indicate that there is a feature, number, step, operation, component, part, or combination thereof described in the specification, and one or more other features. It is to be understood that the present invention does not exclude the possibility of the presence or the addition of numbers, steps, operations, components, components, or a combination thereof. In other words, the description "include" a specific configuration in the present invention does not exclude a configuration other than the configuration, it means that additional configuration may be included in the scope of the technical spirit of the present invention or the present invention.
본 발명의 일부의 구성 요소는 본 발명에서 본질적인 기능을 수행하는 필수적인 구성 요소는 아니고 단지 성능을 향상시키기 위한 선택적 구성 요소일 수 있다. 본 발명은 단지 성능 향상을 위해 사용되는 구성 요소를 제외한 본 발명의 본질을 구현하는데 필수적인 구성부만을 포함하여 구현될 수 있고, 단지 성능 향상을 위해 사용되는 선택적 구성 요소를 제외한 필수 구성 요소만을 포함한 구조도 본 발명의 권리범위에 포함된다.Some components of the present invention are not essential components for performing essential functions in the present invention but may be optional components for improving performance. The present invention can be implemented including only the components essential for implementing the essentials of the present invention except for the components used for improving performance, and the structure including only the essential components except for the optional components used for improving performance. Also included in the scope of the present invention.
이하, 도면을 참조하여 본 발명의 실시 형태에 대하여 구체적으로 설명한다. 본 명세서의 실시예를 설명함에 있어, 관련된 공지 구성 또는 기능에 대한 구체적인 설명이 본 명세서의 요지를 흐릴 수 있다고 판단되는 경우에는 그 상세한 설명은 생략하고, 도면상의 동일한 구성요소에 대해서는 동일한 참조부호를 사용하고 동일한 구성요소에 대해서 중복된 설명은 생략한다.EMBODIMENT OF THE INVENTION Hereinafter, embodiment of this invention is described concretely with reference to drawings. In describing the embodiments of the present specification, when it is determined that a detailed description of a related well-known configuration or function may obscure the gist of the present specification, the detailed description is omitted and the same reference numerals are used for the same elements in the drawings. Duplicate descriptions of the same components are omitted.
또한, 이하에서 영상은 동영상(video)을 구성하는 하나의 픽처를 의미할 수 있으며, 동영상 자체를 나타낼 수도 있다. 예를 들면, "영상의 부호화 및/또는 복호화"는 "비디오의 부호화 및/또는 복호화"를 의미할 수 있으며, "비디오를 구성하는 영상들 중 하나의 영상의 부호화 및/또는 복호화"를 의미할 수도 있다. 여기서, 픽처는 영상과 동일한 의미를 가질 수 있다.Also, hereinafter, an image may mean one picture constituting a video and may represent a video itself. For example, "encoding and / or decoding of an image" may mean "encoding and / or decoding of a video" and may mean "encoding and / or decoding of one of images constituting the video." It may be. Here, the picture may have the same meaning as the image.
용어 설명Term description
부호화기(Encoder): 부호화를 수행하는 장치를 의미할 수 있다.Encoder: This may mean an apparatus for performing encoding.
복호화기(Decoder): 복호화를 수행하는 장치를 의미할 수 있다.Decoder: Refers to an apparatus for performing decoding.
파싱(Parsing): 엔트로피 복호화하여 구문 요소(Syntax Element)의 값을 결정하는 것을 의미하거나, 엔트로피 복호화 자체를 의미할 수 있다.Parsing: This may mean determining a value of a syntax element by entropy decoding or may refer to entropy decoding itself.
블록(Block): 샘플(Sample)의 MxN 배열이며, 여기서 M과 N은 양의 정수 값을 의미하며, 블록은 흔히 2차원 형태의 샘플 배열을 의미할 수 있다.Block: An MxN array of samples, where M and N are positive integer values, and a block can often mean a two-dimensional sample array.
샘플(Sample): 블록을 구성하는 기본 단위이며, 비트 깊이 (bit depth, Bd)에 따라 0부터 2Bd - 1까지의 값을 표현 할 수 있다. 본 발명에서 화소 및 픽셀은 샘플과 같은 의미로 사용될 수 있다. Sample: This is a basic unit that constitutes a block and can represent values from 0 to 2 Bd -1 depending on the bit depth (B d ). In the present invention, the pixel and the pixel may be used as the sample.
유닛(Unit): 영상 부호화 및 복호화의 단위를 의미할 수 있다. 영상의 부호화 및 복호화에 있어서, 유닛은 하나의 영상의 분할에 의해 생성된 영역일 수 있다. 또한, 유닛은 하나의 영상을 세분화 된 유닛으로 분할하여 부호화 혹은 복호화 할 때 그 분할된 단위를 의미할 수 있다. 영상의 부호화 및 복호화에 있어서, 유닛 별로 기정의된 처리가 수행될 수 있다. 하나의 유닛은 유닛에 비해 더 작은 크기를 갖는 하위 유닛으로 더 분할될 수 있다. 기능에 따라서, 유닛은 블록(Block), 매크로블록(Macroblock), 부호화 트리 유닛(Coding Tree Unit), 부호화 트리 블록(Coding Tree Block), 부호화 유닛(Coding Unit), 부호화 블록(Coding Block), 예측 유닛(Prediction Unit), 예측 블록(Prediction Block), 변환 유닛(Transform Unit), 변환 블록(Transform Block) 등을 의미할 수 있다. 또한, 유닛은 블록과 구분하여 지칭하기 위해 휘도(Luma) 성분 블록과 그에 대응하는 색차(Chroma) 성분 블록 그리고 각 블록에 대한 구문 요소를 포함한 것을 의미할 수 있다. 유닛은 다양한 크기와 형태를 가질 수 있으며, 특히 유닛의 형태는 직사각형뿐만 아니라 정사각형, 사다리꼴, 삼각형, 오각형 등 2차원으로 표현할 수 있는 기하학적 도형을 포함할 수 있다. 또한, 유닛 정보에는 부호화 유닛, 예측 유닛, 변환 유닛 등을 가리키는 유닛의 타입, 유닛의 크기, 유닛의 깊이, 유닛의 부호화 및 복호화 순서 등 중 적어도 하나 이상을 포함할 수 있다.Unit: may mean a unit of image encoding and decoding. In encoding and decoding of an image, a unit may be an area generated by division of one image. In addition, a unit may mean a divided unit when a single image is divided into subdivided units to be encoded or decoded. In encoding and decoding of an image, a predetermined process may be performed for each unit. One unit may be further divided into subunits having a smaller size than the unit. Depending on the function, the unit may be a block, a macroblock, a coding tree unit, a coding tree block, a coding unit, a coding block, a prediction. It may mean a unit, a prediction block, a transform unit, a transform block, or the like. In addition, the unit may refer to a luma component block, a chroma component block corresponding thereto, and a syntax element for each block in order to refer to the block separately. The unit may have various sizes and shapes, and in particular, the shape of the unit may include a geometric figure that can be expressed in two dimensions such as a square, a trapezoid, a triangle, a pentagon, as well as a rectangle. In addition, the unit information may include at least one of a type of a unit indicating a coding unit, a prediction unit, a transformation unit, and the like, a size of a unit, a depth of a unit, an encoding and decoding order of the unit, and the like.
복원된 주변 유닛(Reconstructed Neighbor Unit): 부호화/복호화 대상 유닛 주변에 공간적(Spatial)/시간적(Temporal)으로 이미 부호화 혹은 복호화되어 복원된 유닛을 의미할 수 있다. 이때, 복원된 주변 유닛은 복원된 주변 블록을 의미할 수 있다.Reconstructed Neighbor Unit: A reconstructed neighbor unit may refer to a unit that has already been encoded or decoded in a spatial / temporal manner around the encoding / decoding target unit. In this case, the restored peripheral unit may mean a restored peripheral block.
주변 블록(Neighbor block): 부호화/복호화 대상 블록에 인접한 블록을 의미할 수 있다. 부호화/복호화 대상 블록에 인접한 블록은 부호화/복호화 대상 블록에 경계가 맞닿은 블록을 의미할 수 있다. 주변 블록은 부호화/복호화 대상 블록의 인접한 꼭지점에 위치한 블록을 의미할 수 있다. 주변 블록은 복원된 주변 블록을 의미할 수도 있다.Neighbor block: A neighbor block may mean a block adjacent to an encoding / decoding target block. The block adjacent to the encoding / decoding object block may mean a block in which a boundary of the encoding / decoding object block abuts. The neighboring block may mean a block located at an adjacent vertex of the encoding / decoding target block. The neighboring block may mean a restored neighboring block.
유닛 깊이(Depth): 유닛이 분할된 정도를 의미하며, 트리 구조(Tree Structure)에서 루트 노드(Root Node)는 깊이가 가장 얕고, 리프 노드(Leaf Node)는 깊이가 가장 깊다고 할 수 있다.Unit Depth: It means the degree of unit division. In the tree structure, the root node has the smallest depth, and the leaf node has the deepest depth.
심볼(Symbol): 부호화/복호화 대상 유닛 구문 요소 및 부호화 파라미터(coding parameter), 변환 계수(Transform Coefficient)의 값 등을 의미할 수 있다.Symbol: This may mean a encoding / decoding target unit syntax element, a coding parameter, a value of a transform coefficient, or the like.
파라미터 세트(Parameter Set): 비트스트림 내의 구조 중 헤더 정보에 해당할 수 있으며, 비디오 파라미터 세트(video parameter set), 시퀀스 파라미터 세트(sequence parameter set), 픽처 파라미터 세트(picture parameter set), 적응 파라미터 세트(adaptation parameter set) 중 적어도 하나 이상이 파라미터 세트에 포함될 수 있다. 또한, 파라미터 세트에는 슬라이스(slice) 헤더 및 타일(tile) 헤더 정보를 포함한 의미를 가질 수 있다.Parameter set: may correspond to header information among structures in the bitstream, and includes a video parameter set, a sequence parameter set, a picture parameter set, and an adaptive parameter set. At least one or more of the adaptation parameter set may be included in the parameter set. In addition, the parameter set may have a meaning including slice header and tile header information.
비트스트림(Bitstream): 부호화된 영상 정보를 포함하는 비트의 열을 의미할 수 있다.Bitstream: A bitstream may mean a string of bits including encoded image information.
예측 유닛(Prediction Unit): 화면 간 예측 또는 화면 내 예측 및 그에 대한 보상을 수행할 때의 기본 유닛이며, 하나의 예측 유닛은 크기가 작은 복수의 파티션(Partition)으로 분할 될 수도 있다. 이 경우, 복수의 파티션 각각이 상기 예측 및 보상 수행 시의 기본 유닛이 되며, 예측 유닛이 분할된 파티션도 예측 유닛이라고 할 수 있다. 예측 유닛은 다양한 크기와 형태를 가질 수 있으며, 특히 예측 유닛의 형태는 직사각형뿐만 아니라 정사각형, 사다리꼴, 삼각형, 오각형 등 2차원으로 표현할 수 있는 기하학적 도형을 포함할 수 있다. Prediction Unit: This is a basic unit when performing inter prediction or intra prediction and compensation thereof, and one prediction unit may be divided into a plurality of partitions having a small size. In this case, each of the plurality of partitions becomes a basic unit at the time of performing the prediction and compensation, and the partition in which the prediction unit is divided may also be called a prediction unit. The prediction unit may have various sizes and shapes, and in particular, the shape of the prediction unit may include a geometric figure that can be expressed in two dimensions such as a square, a trapezoid, a triangle, a pentagon, as well as a rectangle.
예측 유닛 파티션(Prediction Unit Partition): 예측 유닛이 분할된 형태를 의미할 수 있다.Prediction Unit Partition: This may mean a form in which a prediction unit is divided.
참조 영상 리스트(Reference Picture List): 화면 간 예측 혹은 움직임 보상에 사용되는 하나 이상의 참조 영상이 포함된 리스트를 의미할 수 있다. 참조 영상 리스트의 종류는 LC (List Combined), L0 (List 0), L1 (List 1), L2 (List 2), L3 (List 3) 등이 있을 수 있으며, 화면 간 예측에는 1개 이상의 참조 영상 리스트가 사용될 수 있다.Reference Picture List: Refers to a list including one or more reference pictures used for inter prediction or motion compensation. The types of reference picture lists may be LC (List Combined), L0 (List 0), L1 (List 1), L2 (List 2), L3 (List 3), and the like. Lists can be used.
화면 간 예측 지시자(Inter Prediction Indicator): 화면 간 예측 시에 부호화/복호화 대상 블록의 화면 간 예측 방향(단방향 예측, 쌍방향 예측 등)을 의미할 수 있으며, 부호화/복호화 대상 블록이 예측 블록을 생성할 때 사용하는 참조 영상 수를 의미할 수 있으며, 부호화/복호화 대상 블록이 화면 간 예측 혹은 움직임 보상을 수행할 때 사용하는 예측 블록의 수를 의미할 수 있다.Inter Prediction Indicator: It may mean the inter prediction direction (unidirectional prediction, bi-directional prediction, etc.) of the block to be encoded / decoded during inter prediction, and the block to be encoded / decoded will generate the prediction block. This may mean the number of reference pictures used, and may mean the number of prediction blocks used when the encoding / decoding target block performs inter prediction or motion compensation.
참조 영상 색인(Reference Picture Index): 참조 영상 리스트에서 특정 참조 영상에 대한 색인을 의미할 수 있다. 여기서, 색인은 인덱스를 의미할 수 있다.Reference Picture Index: A reference picture index may mean an index of a specific reference picture in the reference picture list. Here, the index may mean an index.
참조 영상(Reference Picture): 화면 간 예측 혹은 움직임 보상을 위해서 특정 유닛이 참조하는 영상을 의미할 수 있으며, 참조 영상을 참조 픽처라고도 지칭할 수 있다.Reference Picture: Refers to an image referred to by a specific unit for inter prediction or motion compensation. The reference picture may also be referred to as a reference picture.
움직임 벡터(Motion Vector): 화면 간 예측 혹은 움직임 보상에 사용되는 2차원 벡터이며, 부호화/복호화 대상 영상과 참조 영상 사이의 오프셋을 의미할 수 있다. 예를 들어, (mvX, mvY)는 움직임 벡터를 나타낼 수 있으며, mvX는 가로(horizontal) 성분, mvY는 세로(vertical) 성분을 나타낼 수 있다.Motion Vector: A two-dimensional vector used for inter prediction or motion compensation, and may mean an offset between an encoding / decoding target image and a reference image. For example, (mvX, mvY) may represent a motion vector, mvX may represent a horizontal component, and mvY may represent a vertical component.
움직임 벡터 후보(Motion Vector Candidate): 움직임 벡터를 예측할 때 예측 후보가 되는 유닛 혹은 그 유닛의 움직임 벡터를 의미할 수 있다.Motion Vector Candidate: When a motion vector is predicted, it may mean a unit which is a prediction candidate or a motion vector of the unit.
움직임 벡터 후보 리스트(Motion Vector Candidate List): 움직임 벡터 후보를 이용하여 구성된 리스트를 의미할 수 있다.Motion Vector Candidate List: A motion vector candidate list may mean a list constructed using motion vector candidates.
움직임 벡터 후보 색인(Motion Vector Candidate Index): 움직임 벡터 후보 리스트 내의 움직임 벡터 후보를 가리키는 지시자, 움직임 벡터 예측기(Motion Vector Predictor)의 색인(index)이라고도 할 수 있다.Motion Vector Candidate Index: An indicator indicating a motion vector candidate in a motion vector candidate list, and may be referred to as an index of a motion vector predictor.
움직임 정보(Motion Information): 움직임 벡터, 참조 영상 색인, 화면 간 예측 지시자(Inter Prediction Indicator) 뿐만 아니라 참조 영상 리스트 정보, 참조 영상, 움직임 벡터 후보, 움직임 벡터 후보 색인 등 중 적어도 하나 이상을 포함하는 정보를 의미할 수 있다.Motion Information: Information including at least one of a motion vector, a reference picture index, an inter prediction indicator, as well as reference picture list information, a reference picture, a motion vector candidate, and a motion vector candidate index. It may mean.
머지 후보 리스트(Merge Candidate List): 머지 후보를 이용하여 구성된 리스트를 의미할 수 있다.Merge Candidate List: A merge candidate list may mean a list constructed using merge candidates.
머지 후보(Merge Candidate): 공간적 머지 후보, 시간적 머지 후보, 조합된 머지 후보, 조합 양예측 머지 후보, 제로 머지 후보 등을 포함할 수 있으며, 머지 후보는 예측 종류 정보(prediction type information), 각 리스트에 대한 참조 영상 색인(reference picture index), 움직임 벡터(motion vector) 등의 움직임 정보를 포함할 수 있다.Merge Candidate: may include a spatial merge candidate, a temporal merge candidate, a combined merge candidate, a combined two-prediction merge candidate, a zero merge candidate, and the like. The merge candidate may include prediction type information and each list. It may include motion information such as a reference picture index and a motion vector.
머지 색인(Merge Index): 머지 후보 리스트 내 머지 후보를 지시하는 정보를 의미할 수 있다. 또한, 머지 색인은 공간적/시간적으로 현재 블록과 인접하게 복원된 블록들 중 머지 후보를 유도한 블록을 지시할 수 있다. 또한, 머지 색인은 머지 후보가 가지는 움직임 정보 중 적어도 하나 이상을 지시할 수 있다.Merge Index: Refers to information indicating a merge candidate in the merge candidate list. In addition, the merge index may indicate a block in which a merge candidate is derived among blocks reconstructed adjacent to the current block in a spatial / temporal manner. In addition, the merge index may indicate at least one or more of the motion information that the merge candidate has.
변환 유닛(Transform Unit): 변환, 역변환, 양자화, 역양자화, 변환 계수 부호화/복호화와 같이 잔여 신호(residual signal) 부호화/복호화를 수행할 때의 기본 유닛을 의미할 수 있으며, 하나의 변환 유닛은 분할되어 크기가 작은 복수의 변환 유닛으로 분할될 수 있다. 변환 유닛은 다양한 크기와 형태를 가질 수 있으며, 특히 변환 유닛의 형태는 직사각형뿐만 아니라 정사각형, 사다리꼴, 삼각형, 오각형 등 2차원으로 표현할 수 있는 기하학적 도형을 포함할 수 있다. Transform Unit: A transform unit may refer to a basic unit when performing residual signal encoding / decoding such as transform, inverse transform, quantization, inverse quantization, and transform coefficient encoding / decoding. It may be divided into a plurality of transform units having a small size. The transform unit may have various sizes and shapes, and in particular, the shape of the transform unit may include a geometric figure that can be expressed in two dimensions such as a square, a trapezoid, a triangle, a pentagon, as well as a rectangle.
스케일링(Scaling): 변환 계수 레벨에 인수를 곱하는 과정을 의미할 수 있으며, 결과로 변환 계수를 생성할 수 있다. 스케일링을 역양자화(dequantization)라고도 부를 수 있다.Scaling: This may mean a process of multiplying a transform coefficient level by a factor and generating a transform coefficient as a result. Scaling can also be called dequantization.
양자화 매개변수(Quantization Parameter): 양자화 및 역양자화에서 변환 계수 레벨(transform coefficient level)을 스케일링(scaling)할 때 사용하는 값을 의미할 수 있다. 이때, 양자화 매개변수는 양자화 스텝 크기(step size)에 매핑된 값일 수 있다.Quantization Parameter: A quantization parameter may mean a value used when scaling transform coefficient levels in quantization and inverse quantization. In this case, the quantization parameter may be a value mapped to a quantization step size.
잔여 양자화 매개변수(Delta Quantization Parameter): 예측된 양자화 매개변수와 부호화/복호화 대상 유닛의 양자화 매개변수의 차분된 값을 의미할 수 있다.Residual Quantization Parameter: A quantization parameter may mean a differential value between the predicted quantization parameter and the quantization parameter of the encoding / decoding target unit.
스캔(Scan): 블록 혹은 행렬 내 계수의 순서를 정렬하는 방법을 의미할 수 있으며, 예를 들어 2차원 배열을 1차원 배열 형태로 정렬하는 것을 스캔이라고 하며, 1차원 배열을 2차원 배열 형태로 정렬하는 것도 스캔 혹은 역 스캔(Inverse Scan)이라고 부를 수 있다.Scan: Refers to a method of arranging the order of coefficients in a block or matrix. For example, aligning a two-dimensional array into a one-dimensional array is called a scan, and a one-dimensional array into a two-dimensional array. Sorting can also be called scan or inverse scan.
변환 계수(Transform Coefficient): 변환을 수행하고 나서 생성된 계수 값, 본 발명에서는 변환 계수에 양자화를 적용한 양자화된 변환 계수 레벨(transform coefficient level)도 변환 계수의 의미에 포함될 수 있다.Transform Coefficient: A coefficient value generated after performing a transform, and in the present invention, a quantized transform coefficient level in which quantization is applied to the transform coefficient may also be included in the meaning of the transform coefficient.
넌제로 변환 계수(Non-zero Transform Coefficient): 변환 계수 값의 크기가 0이 아닌 변환 계수 혹은 값의 크기가 0이 아닌 변환 계수 레벨을 의미할 수 있다.Non-zero Transform Coefficient: A non-zero transform coefficient may mean a transform coefficient whose magnitude is not zero or a transform coefficient level whose magnitude is not zero.
양자화 행렬(Quantization Matrix): 영상의 주관적 화질 혹은 객관적 화질을 향상시키기 위해서 양자화 혹은 역양자화 과정에서 이용하는 행렬을 의미할 수 있다. 양자화 행렬을 스케일링 리스트(scaling list)라고도 부를 수 있다.Quantization Matrix: A matrix used in a quantization or inverse quantization process to improve the subjective or objective image quality of an image. The quantization matrix may also be called a scaling list.
양자화 행렬 계수(Quantization Matrix Coefficient): 양자화 행렬 내의 각 원소(element)를 의미할 수 있다. 양자화 행렬 계수를 행렬 계수(matrix coefficient)라고도 할 수 있다.Quantization Matrix Coefficient: It may mean each element in the quantization matrix. Quantization matrix coefficients may also be referred to as matrix coefficients.
기본 행렬(Default Matrix): 부호화기와 복호화기에서 미리 정의되어 있는 소정의 양자화 행렬을 의미할 수 있다.Default Matrix: A predetermined matrix may mean a predetermined quantization matrix defined in the encoder and the decoder.
비 기본 행렬(Non-default Matrix): 부호화기와 복호화기에서 미리 정의되지 않고, 사용자에 의해서 시그널링되는 양자화 행렬을 의미할 수 있다.Non-default Matrix: A non-default matrix, which is not defined in the encoder and the decoder, may be a quantization matrix signaled by a user.
부호화 트리 유닛(Coding Tree Unit): 하나의 휘도 성분(Y) 부호화 트리 블록과 관련된 두 색차 성분(Cb, Cr) 부호화 트리 블록들로 구성될 수 있다. 각 부호화 트리 유닛은 부호화 유닛, 예측 유닛, 변환 유닛 등의 하위 유닛을 구성하기 위하여 쿼드트리(quad tree), 이진트리(binary tree) 등 하나 이상의 분할 방식을 이용하여 분할될 수 있다. 입력 영상의 분할처럼 영상의 복/부호화 과정에서 처리 단위가 되는 픽셀 블록을 지칭하기 위한 용어로 사용될 수 있다. Coding Tree Unit: A coding component may be composed of two color difference component (Cb, Cr) coding tree blocks associated with one luminance component (Y) coding tree block. Each coding tree unit may be split using one or more partitioning methods such as a quad tree and a binary tree to form sub-units such as a coding unit, a prediction unit, and a transform unit. It may be used as a term for a pixel block that becomes a processing unit in a decoding / encoding process of an image, such as splitting an input image.
부호화 트리 블록(Coding Tree Block): Y 부호화 트리 블록, Cb 부호화 트리 블록, Cr 부호화 트리 블록 중 어느 하나를 지칭하기 위한 용어로 사용될 수 있다.Coding Tree Block: A term used to refer to any one of a Y coded tree block, a Cb coded tree block, and a Cr coded tree block.
도 1은 본 발명이 적용되는 부호화 장치의 일 실시예에 따른 구성을 나타내는 블록도이다.1 is a block diagram illustrating a configuration of an encoding apparatus according to an embodiment of the present invention.
부호화 장치(100)는 비디오 부호화 장치 또는 영상 부호화 장치일 수 있다. 비디오는 하나 이상의 영상들을 포함할 수 있다. 부호화 장치(100)는 비디오의 하나 이상의 영상들을 시간에 따라 순차적으로 부호화할 수 있다.The encoding apparatus 100 may be a video encoding apparatus or an image encoding apparatus. The video may include one or more images. The encoding apparatus 100 may sequentially encode one or more images of the video over time.
도 1을 참조하면, 부호화 장치(100)는 움직임 예측부(111), 움직임 보상부(112), 인트라 예측부(120), 스위치(115), 감산기(125), 변환부(130), 양자화부(140), 엔트로피 부호화부(150), 역양자화부(160), 역변환부(170), 가산기(175), 필터부(180) 및 참조 픽처 버퍼(190)를 포함할 수 있다.Referring to FIG. 1, the encoding apparatus 100 may include a motion predictor 111, a motion compensator 112, an intra predictor 120, a switch 115, a subtractor 125, a transformer 130, and quantization. The unit 140 may include an entropy encoder 150, an inverse quantizer 160, an inverse transform unit 170, an adder 175, a filter unit 180, and a reference picture buffer 190.
부호화 장치(100)는 입력 영상에 대해 인트라 모드 및/또는 인터 모드로 부호화를 수행할 수 있다. 또한, 부호화 장치(100)는 입력 영상에 대한 부호화를 통해 비트스트림을 생성할 수 있고, 생성된 비트스트림을 출력할 수 있다. 예측 모드로 인트라 모드가 사용되는 경우 스위치(115)는 인트라로 전환될 수 있고, 예측 모드로 인터 모드가 사용되는 경우 스위치(115)는 인터로 전환될 수 있다. 여기서 인트라 모드는 화면 내 예측 모드를 의미할 수 있으며, 인터 모드는 화면 간 예측 모드를 의미할 수 있다. 부호화 장치(100)는 입력 영상의 입력 블록에 대한 예측 블록을 생성할 수 있다. 또한, 부호화 장치(100)는 예측 블록이 생성된 후, 입력 블록 및 예측 블록의 차분(residual)을 부호화할 수 있다. 입력 영상은 현재 부호화의 대상인 현재 영상으로 칭해질 수 있다. 입력 블록은 현재 부호화의 대상인 현재 블록 혹은 부호화 대상 블록으로 칭해질 수 있다.The encoding apparatus 100 may encode the input image in an intra mode and / or an inter mode. In addition, the encoding apparatus 100 may generate a bitstream through encoding of an input image, and may output the generated bitstream. When the intra mode is used as the prediction mode, the switch 115 may be switched to intra, and when the inter mode is used as the prediction mode, the switch 115 may be switched to inter. In this case, the intra mode may mean an intra prediction mode, and the inter mode may mean an inter prediction mode. The encoding apparatus 100 may generate a prediction block for the input block of the input image. In addition, after the prediction block is generated, the encoding apparatus 100 may encode a residual between the input block and the prediction block. The input image may be referred to as a current image that is a target of current encoding. The input block may be referred to as a current block or an encoding target block that is a target of the current encoding.
예측 모드가 인트라 모드인 경우, 인트라 예측부(120)는 현재 블록의 주변에 이미 부호화된 블록의 픽셀 값을 참조 화소로서 이용할 수 있다. 인트라 예측부(120)는 참조 화소를 이용하여 공간적 예측을 수행할 수 있고, 공간적 예측을 통해 입력 블록에 대한 예측 샘플들을 생성할 수 있다. 여기서 인트라 예측은 화면 내 예측을 의미할 수 있다.When the prediction mode is the intra mode, the intra prediction unit 120 may use the pixel value of a block that is already encoded around the current block as a reference pixel. The intra predictor 120 may perform spatial prediction using the reference pixel, and generate prediction samples for the input block through spatial prediction. Intra prediction may refer to intra prediction.
예측 모드가 인터 모드인 경우, 움직임 예측부(111)는, 움직임 예측 과정에서 참조 영상으로부터 입력 블록과 가장 매치가 잘 되는 영역을 검색할 수 있고, 검색된 영역을 이용하여 움직임 벡터를 도출할 수 있다. 참조 영상은 참조 픽처 버퍼(190)에 저장될 수 있다.When the prediction mode is the inter mode, the motion predictor 111 may search an area that best matches the input block from the reference image in the motion prediction process, and derive a motion vector using the searched area. . The reference picture may be stored in the reference picture buffer 190.
움직임 보상부(112)는 움직임 벡터를 이용하는 움직임 보상을 수행함으로써 예측 블록을 생성할 수 있다. 여기서, 움직임 벡터는 인터 예측에 사용되는 2차원 벡터일 수 있다. 또한 움직임 벡터는 현재 영상 및 참조 영상 간의 오프셋(offset)을 나타낼 수 있다. 여기서 인터 예측은 화면 간 예측을 의미할 수 있다.The motion compensator 112 may generate a prediction block by performing motion compensation using a motion vector. Here, the motion vector may be a two-dimensional vector used for inter prediction. In addition, the motion vector may indicate an offset between the current picture and the reference picture. Here, inter prediction may mean inter prediction.
상기 움직임 예측부(111)과 움직임 보상부(112)는 움직임 벡터의 값이 정수 값을 가지지 않을 경우에 참조 영상 내의 일부 영역에 대해 보간 필터(Interpolation Filter)를 적용하여 예측 블록을 생성할 수 있다. 화면 간 예측 혹은 움직임 보상을 수행하기 위해 부호화 유닛을 기준으로 해당 부호화 유닛에 포함된 예측 유닛의 움직임 예측 및 움직임 보상 방법이 스킵 모드(Skip Mode), 머지 모드(Merge mode), AMVP 모드(AMVP Mode), 현재 픽처 참조 모드 중 어떠한 방법인지 여부를 판단할 수 있고, 각 모드에 따라 화면 간 예측 혹은 움직임 보상을 수행할 수 있다. 여기서, 현재 픽처 참조 모드는 부호화 대상 블록이 속한 현재 픽처 내의 기-복원된 영역을 이용한 예측 모드를 의미할 수 있다. 상기 기-복원된 영역을 특정하기 위해 현재 픽처 참조 모드를 위한 움직임 벡터가 정의될 수 있다. 부호화 대상 블록이 현재 픽처 참조 모드로 부호화되는지 여부는 부호화 대상 블록의 참조 영상 색인을 이용하여 부호화될 수 있다.The motion predictor 111 and the motion compensator 112 may generate a prediction block by applying an interpolation filter to a part of a reference image when the motion vector does not have an integer value. . In order to perform inter prediction or motion compensation, a motion prediction and motion compensation method of a prediction unit included in a coding unit based on a coding unit may be skip mode, merge mode, or AMVP mode. ), It may be determined which method is the current picture reference mode, and inter prediction or motion compensation may be performed according to each mode. Here, the current picture reference mode may mean a prediction mode using a pre-restored region in the current picture to which the encoding target block belongs. A motion vector for the current picture reference mode may be defined to specify the pre-restored region. Whether the encoding target block is encoded in the current picture reference mode may be encoded using the reference image index of the encoding target block.
감산기(125)는 입력 블록 및 예측 블록의 차분을 사용하여 잔여 블록(residual block)을 생성할 수 있다. 잔여 블록은 잔여 신호로 칭해질 수도 있다.The subtractor 125 may generate a residual block using the difference between the input block and the prediction block. The residual block may be referred to as the residual signal.
변환부(130)는 잔여 블록에 대해 변환(transform)을 수행하여 변환 계수(transform coefficient)를 생성할 수 있고, 변환 계수를 출력할 수 있다. 여기서, 변환 계수는 잔여 블록에 대한 변환을 수행함으로써 생성된 계수 값일 수 있다. 변환 생략(transform skip) 모드가 적용되는 경우, 변환부(130)는 잔여 블록에 대한 변환을 생략할 수도 있다.The transform unit 130 may generate a transform coefficient by performing transform on the residual block, and output a transform coefficient. Here, the transform coefficient may be a coefficient value generated by performing transform on the residual block. When the transform skip mode is applied, the transform unit 130 may omit the transform on the residual block.
변환 계수에 양자화를 적용함으로써 양자화된 변환 계수 레벨(transform coefficient level)이 생성될 수 있다. 이하, 실시예들에서는 양자화된 변환 계수 레벨도 변환 계수로 칭해질 수 있다.Quantized transform coefficient levels may be generated by applying quantization to the transform coefficients. In the following embodiments, the quantized transform coefficient level may also be referred to as transform coefficient.
양자화부(140)는 변환 계수를 양자화 매개변수에 따라 양자화함으로써 양자화된 변환 계수 레벨(transform coefficient level)을 생성할 수 있고, 양자화된 변환 계수 레벨을 출력할 수 있다. 이때, 양자화부(140)에서는 양자화 행렬을 사용하여 변환 계수를 양자화할 수 있다.The quantization unit 140 may generate a quantized transform coefficient level by quantizing the transform coefficient according to the quantization parameter, and output the quantized transform coefficient level. In this case, the quantization unit 140 may quantize the transform coefficients using the quantization matrix.
엔트로피 부호화부(150)는, 양자화부(140)에서 산출된 값들 또는 부호화 과정에서 산출된 부호화 파라미터(Coding Parameter) 값들 등에 대하여 확률 분포에 따른 엔트로피 부호화를 수행함으로써 비트스트림(bitstream)을 생성할 수 있고, 비트스트림을 출력할 수 있다. 엔트로피 부호화부(150)는 영상의 픽셀의 정보 외에 영상의 복호화를 위한 정보에 대한 엔트로피 부호화를 수행할 수 있다. 예를 들면, 영상의 복호화를 위한 정보는 구문 요소(syntax element) 등을 포함할 수 있다. The entropy encoder 150 may generate a bitstream by performing entropy encoding according to probability distribution on values calculated by the quantizer 140 or coding parameter values calculated in the encoding process. And output a bitstream. The entropy encoder 150 may perform entropy encoding on information for decoding an image in addition to information on pixels of an image. For example, the information for decoding the image may include a syntax element.
엔트로피 부호화가 적용되는 경우, 높은 발생 확률을 갖는 심볼(symbol)에 적은 수의 비트가 할당되고 낮은 발생 확률을 갖는 심볼에 많은 수의 비트가 할당되어 심볼이 표현됨으로써, 부호화 대상 심볼들에 대한 비트열의 크기가 감소될 수 있다. 따라서 엔트로피 부호화를 통해서 영상 부호화의 압축 효율이 높아질 수 있다. 엔트로피 부호화부(150)는 엔트로피 부호화를 위해 지수 골롬(exponential Golomb), CAVLC(Context-Adaptive Variable Length Coding), CABAC(Context-Adaptive Binary Arithmetic Coding)과 같은 부호화 방법을 사용할 수 있다. 예를 들면, 엔트로피 부호화부(150)는 가변 길이 부호화(Variable Length Coding/Code; VLC) 테이블을 이용하여 엔트로피 부호화를 수행할 수 있다. 또한 엔트로피 부호화부(150)는 대상 심볼의 이진화(binarization) 방법 및 대상 심볼/빈(bin)의 확률 모델(probability model)을 도출한 후, 도출된 이진화 방법 또는 확률 모델을 사용하여 산술 부호화를 수행할 수도 있다.When entropy encoding is applied, a small number of bits are assigned to a symbol having a high probability of occurrence and a large number of bits are assigned to a symbol having a low probability of occurrence, thereby representing bits for encoding symbols. The size of the heat can be reduced. Therefore, compression efficiency of image encoding may be increased through entropy encoding. The entropy encoder 150 may use an encoding method such as exponential Golomb, context-adaptive variable length coding (CAVLC), or context-adaptive binary arithmetic coding (CABAC) for entropy encoding. For example, the entropy encoder 150 may perform entropy coding using a variable length coding (VLC) table. Also, the entropy encoder 150 derives a binarization method of a target symbol and a probability model of a target symbol / bin, and then performs arithmetic coding using the derived binarization method or a probability model. You may.
엔트로피 부호화부(150)는 변환 계수 레벨을 부호화하기 위해 변환 계수 스캐닝(Transform Coefficient Scanning) 방법을 통해 2차원의 블록 형태 계수를 1차원의 벡터 형태로 변경할 수 있다. 예를 들어, 업라이트(up right) 스캐닝을 이용하여 블록의 계수를 스캔함으로써 1차원 벡터 형태로 변경시킬 수 있다. 변환 유닛의 크기 및 화면 내 예측 모드에 따라 업라이트 스캔 대신 2차원의 블록 형태 계수를 열 방향으로 스캔하는 수직 스캔, 2차원의 블록 형태 계수를 행 방향으로 스캔하는 수평 스캔이 사용될 수도 있다. 즉, 변환 유닛의 크기 및 화면 내 예측 모드에 따라 업라이트 스캔, 수직 방향 스캔 및 수평 방향 스캔 중 어떠한 스캔 방법이 사용될지 여부를 결정할 수 있다.The entropy encoder 150 may change a two-dimensional block shape coefficient into a one-dimensional vector form through a transform coefficient scanning method to encode a transform coefficient level. For example, upright scanning can be used to scan the coefficients of a block to change it into a one-dimensional vector. Depending on the size of the transform unit and the intra prediction mode, a vertical scan that scans two-dimensional block shape coefficients in a column direction instead of an upright scan and a horizontal scan that scans two-dimensional block shape coefficients in a row direction may be used. That is, according to the size of the conversion unit and the intra prediction mode, it is possible to determine which scan method among upright scan, vertical scan and horizontal scan is used.
부호화 파라미터(Coding Parameter)는 구문 요소와 같이 부호화기에서 부호화되어 복호화기로 시그널링되는 정보뿐만 아니라, 부호화 혹은 복호화 과정에서 유도되는 정보를 포함할 수 있으며, 영상을 부호화하거나 복호화할 때 필요한 정보를 의미할 수 있다. 예를 들어, 블록 크기, 블록 깊이, 블록 분할 정보, 유닛 크기, 유닛 깊이, 유닛 분할 정보, 쿼드트리 형태의 분할 플래그, 이진트리 형태의 분할 플래그, 이진트리 형태의 분할 방향, 화면 내 예측 모드, 화면 내 예측 방향, 참조 샘플 필터링 방법, 예측 블록 경계 필터링 방법, 필터 탭, 필터 계수, 화면 간 예측 모드, 움직임 정보, 움직임 벡터, 참조 영상 색인, 화면 간 예측 방향, 화면 간 예측 지시자, 참조 영상 리스트, 움직임 벡터 예측기, 움직임 벡터 후보 리스트, 움직임 병합 모드(motion merge mode) 사용 여부, 움직임 병합 후보, 움직임 병합 후보 리스트, 스킵(skip) 모드 사용 여부, 보간 필터 종류, 움직임 벡터 크기, 움직임 벡터 표현 정확도, 변환 종류, 변환 크기, 추가(2차) 변환 사용 여부 정보, 잔여 신호 유무 정보, 부호화 블록 패턴(Coded Block Pattern), 부호화 블록 플래그(Coded Block Flag), 양자화 매개변수, 양자화 행렬, 루프 내 필터 정보, 루프 내 필터 적용 여부 정보, 루프 내 필터 계수, 이진화/역이진화 방법, 문맥 모델, 문맥 빈, 바이패스 빈, 변환 계수, 변환 계수 레벨, 변환 계수 레벨 스캐닝 방법, 영상 디스플레이/출력 순서, 슬라이스 식별 정보, 슬라이스 타입, 슬라이스 분할 정보, 타일 식별 정보, 타일 타입, 타일 분할 정보, 픽처 타입, 비트 심도, 휘도 신호 혹은 색차 신호에 대한 정보 중 적어도 하나 이상의 값 또는 조합된 형태가 부호화 파라미터에 포함될 수 있다.A coding parameter may include information derived from an encoding or decoding process as well as information encoded by an encoder and signaled to a decoder, such as a syntax element, and may mean information required when encoding or decoding an image. have. For example, block size, block depth, block splitting information, unit size, unit depth, unit splitting information, quadtree split flag, binary tree split flag, binary tree split direction, intra prediction mode, Intra prediction direction, reference sample filtering method, prediction block boundary filtering method, filter tab, filter coefficient, inter prediction mode, motion information, motion vector, reference image index, inter prediction direction, inter prediction indicator, reference image list , Motion vector predictor, motion vector candidate list, motion merge mode, motion merge candidate, motion merge candidate list, skip mode, interpolation filter type, motion vector size, motion vector representation accuracy , Transform type, transform size, additional (secondary) transform availability information, residual signal presence information, coded block pattern, Coded Block Flag, Quantization Parameter, Quantization Matrix, In-loop Filter Information, In-loop Filter Applicability Information, In-loop Filter Coefficient, Binarization / Debinarization Method, Context Model, Context Bean, Bypass Bean, Transform Coefficient, transform coefficient level, transform coefficient level scanning method, image display / output order, slice identification information, slice type, slice partition information, tile identification information, tile type, tile partition information, picture type, bit depth, luminance signal or color difference At least one or more values or a combined form of the information about the signal may be included in the encoding parameter.
잔여 신호는 원 신호 및 예측 신호 간의 차이(difference)를 의미할 수 있다. 또는, 잔여 신호는 원신호 및 예측 신호 간의 차이를 변환(transform) 함으로써 생성된 신호일 수 있다. 또는, 잔여 신호는 원 신호 및 예측 신호 간의 차이를 변환 및 양자화함으로써 생성된 신호일 수 있다. 잔여 블록은 블록 단위의 잔여 신호일 수 있다.The residual signal may mean a difference between the original signal and the prediction signal. Alternatively, the residual signal may be a signal generated by transforming a difference between the original signal and the prediction signal. Alternatively, the residual signal may be a signal generated by transforming and quantizing the difference between the original signal and the prediction signal. The residual block may be a residual signal in block units.
부호화 장치(100)가 인터 예측을 통한 부호화를 수행할 경우, 부호화된 현재 영상은 이후에 처리되는 다른 영상(들)에 대하여 참조 영상으로서 사용될 수 있다. 따라서, 부호화 장치(100)는 부호화된 현재 영상을 다시 복호화할 수 있고, 복호화된 영상을 참조 영상으로 저장할 수 있다. 복호화를 위해 부호화된 현재 영상에 대한 역양자화 및 역변환이 처리될 수 있다.When the encoding apparatus 100 performs encoding through inter prediction, the encoded current image may be used as a reference image with respect to other image (s) to be processed later. Therefore, the encoding apparatus 100 may decode the encoded current image again and store the decoded image as a reference image. Inverse quantization and inverse transform on the encoded current image may be processed for decoding.
양자화된 계수는 역양자화부(160)에서 역양자화(dequantization)될 수 있고. 역변환부(170)에서 역변환(inverse transform)될 수 있다. 역양자화 및 역변환된 계수는 가산기(175)를 통해 예측 블록과 합해질 수 있다, 역양자화 및 역변환된 계수 및 예측 블록을 합함으로써 복원 블록(reconstructed block) 이 생성될 수 있다.The quantized coefficients may be dequantized in inverse quantization unit 160. The inverse transform unit 170 may perform an inverse transform. The inverse quantized and inverse transformed coefficients may be summed with the prediction block via the adder 175. A reconstructed block may be generated by adding the inverse quantized and inverse transformed coefficients and the prediction block.
복원 블록은 필터부(180)를 거칠 수 있다. 필터부(180)는 디블록킹 필터(deblocking filter), 샘플 적응적 오프셋(Sample Adaptive Offset; SAO), 적응적 루프 필터(Adaptive Loop Filter; ALF) 중 적어도 하나 이상을 복원 블록 또는 복원 영상에 적용할 수 있다. 필터부(180)는 인루프 필터(in-loop filter)로 칭해질 수도 있다.The recovery block may pass through the filter unit 180. The filter unit 180 may apply at least one of a deblocking filter, a sample adaptive offset (SAO), and an adaptive loop filter (ALF) to the reconstructed block or the reconstructed image. Can be. The filter unit 180 may be referred to as an in-loop filter.
디블록킹 필터는 블록들 간의 경계에 생긴 블록 왜곡을 제거할 수 있다. 디블록킹 필터를 수행할지 여부를 판단하기 위해 블록에 포함된 몇 개의 열 또는 행에 포함된 픽셀을 기초로 현재 블록에 디블록킹 필터 적용할지 여부를 판단할 수 있다. 블록에 디블록킹 필터를 적용하는 경우 필요한 디블록킹 필터링 강도에 따라 강한 필터(Strong Filter) 또는 약한 필터(Weak Filter)를 적용할 수 있다. 또한 디블록킹 필터를 적용함에 있어 수직 필터링 및 수평 필터링 수행시 수평 방향 필터링 및 수직 방향 필터링이 병행 처리되도록 할 수 있다.The deblocking filter may remove block distortion generated at boundaries between blocks. In order to determine whether to perform the deblocking filter, it may be determined whether to apply the deblocking filter to the current block based on the pixels included in the several columns or rows included in the block. When the deblocking filter is applied to the block, a strong filter or a weak filter may be applied according to the required deblocking filtering strength. In addition, in applying the deblocking filter, horizontal filtering and vertical filtering may be performed in parallel when vertical filtering and horizontal filtering are performed.
샘플 적응적 오프셋은 부호화 에러를 보상하기 위해 픽셀 값에 적정 오프셋(offset) 값을 더할 수 있다. 샘플 적응적 오프셋은 디블록킹을 수행한 영상에 대해 픽셀 단위로 원본 영상과의 오프셋을 보정할 수 있다. 특정 픽처에 대한 오프셋 보정을 수행하기 위해 영상에 포함된 픽셀을 일정한 수의 영역으로 구분한 후 오프셋을 수행할 영역을 결정하고 해당 영역에 오프셋을 적용하는 방법 또는 각 픽셀의 에지 정보를 고려하여 오프셋을 적용하는 방법을 사용할 수 있다.The sample adaptive offset may add an appropriate offset value to the pixel value to compensate for the encoding error. The sample adaptive offset may correct the offset with the original image on a pixel basis for the deblocked image. In order to perform offset correction on a specific picture, the pixels included in the image are divided into a predetermined number of areas, and then, the area to be offset is determined and the offset is applied to the corresponding area or the offset considering the edge information of each pixel. You can use this method.
적응적 루프 필터는 복원 영상 및 원래의 영상을 비교한 값에 기반하여 필터링을 수행할 수 있다. 영상에 포함된 픽셀을 소정의 그룹으로 나눈 후 해당 그룹에 적용될 하나의 필터를 결정하여 그룹마다 차별적으로 필터링을 수행할 수 있다. 적응적 루프 필터를 적용할지 여부에 관련된 정보는 휘도 신호는 부호화 유닛(Coding Unit, CU) 별로 시그널링될 수 있고, 각각의 블록에 따라 적용될 적응적 루프 필터의 모양 및 필터 계수는 달라질 수 있다. 또한, 적용 대상 블록의 특성에 상관없이 동일한 형태(고정된 형태)의 적응적 루프 필터가 적용될 수도 있다.The adaptive loop filter may perform filtering based on a comparison value between the reconstructed image and the original image. After dividing the pixels included in the image into a predetermined group, one filter to be applied to the group may be determined and filtering may be performed for each group. For information related to whether to apply the adaptive loop filter, the luminance signal may be signaled for each coding unit (CU), and the shape and filter coefficient of the adaptive loop filter to be applied according to each block may vary. In addition, an adaptive loop filter of the same type (fixed form) may be applied regardless of the characteristics of the block to be applied.
필터부(180)를 거친 복원 블록은 참조 픽처 버퍼(190)에 저장될 수 있다. The reconstructed block that has passed through the filter unit 180 may be stored in the reference picture buffer 190.
도 2는 본 발명이 적용되는 복호화 장치의 일 실시예에 따른 구성을 나타내는 블록도이다.2 is a block diagram illustrating a configuration of a decoding apparatus according to an embodiment of the present invention.
복호화 장치(200)는 비디오 복호화 장치 또는 영상 복호화 장치일 수 있다.The decoding apparatus 200 may be a video decoding apparatus or an image decoding apparatus.
도 2를 참조하면, 복호화 장치(200)는 엔트로피 복호화부(210), 역양자화부(220), 역변환부(230), 인트라 예측부(240), 움직임 보상부(250), 가산기(255), 필터부(260) 및 참조 픽처 버퍼(270)를 포함할 수 있다.Referring to FIG. 2, the decoding apparatus 200 may include an entropy decoder 210, an inverse quantizer 220, an inverse transform unit 230, an intra predictor 240, a motion compensator 250, and an adder 255. The filter unit 260 may include a reference picture buffer 270.
복호화 장치(200)는 부호화 장치(100)에서 출력된 비트스트림을 수신할 수 있다. 복호화 장치(200)는 비트스트림에 대하여 인트라 모드 또는 인터 모드로 복호화를 수행할 수 있다. 또한, 복호화 장치(200)는 복호화를 통해 복원 영상을 생성할 수 있고, 복원 영상을 출력할 수 있다.The decoding apparatus 200 may receive a bitstream output from the encoding apparatus 100. The decoding apparatus 200 may decode the bitstream in an intra mode or an inter mode. In addition, the decoding apparatus 200 may generate a reconstructed image through decoding and output the reconstructed image.
복호화에 사용되는 예측 모드가 인트라 모드인 경우 스위치가 인트라로 전환될 수 있다. 복호화에 사용되는 예측 모드가 인터 모드인 경우 스위치가 인터로 전환될 수 있다.When the prediction mode used for decoding is an intra mode, the switch may be switched to intra. When the prediction mode used for decoding is an inter mode, the switch may be switched to inter.
복호화 장치(200)는 입력된 비트스트림으로부터 복원된 잔여 블록(reconstructed residual block)을 획득할 수 있고, 예측 블록을 생성할 수 있다. 복원된 잔여 블록 및 예측 블록이 획득되면, 복호화 장치(200)는 복원된 잔여 블록과 및 예측 블록을 더함으로써 복호화 대상 블록인 복원 블록을 생성할 수 있다. 복호화 대상 블록은 현재 블록으로 칭해질 수 있다.The decoding apparatus 200 may obtain a reconstructed residual block from the input bitstream, and generate a prediction block. When the reconstructed residual block and the prediction block are obtained, the decoding apparatus 200 may generate a reconstruction block that is a decoding target block by adding the reconstructed residual block and the prediction block. The decoding target block may be referred to as a current block.
엔트로피 복호화부(210)는 비트스트림에 대한 확률 분포에 따른 엔트로피 복호화를 수행함으로써 심볼들을 생성할 수 있다. 생성된 심볼들은 양자화된 변환 계수 레벨(transform coefficient level) 형태의 심볼을 포함할 수 있다. 여기에서, 엔트로피 복호화 방법은 상술된 엔트로피 부호화 방법과 유사할 수 있다. 예를 들면, 엔트로피 복호화 방법은 상술된 엔트로피 부호화 방법의 역과정일 수 있다.The entropy decoder 210 may generate symbols by performing entropy decoding according to a probability distribution of the bitstream. The generated symbols may include symbols in the form of quantized transform coefficient levels. Here, the entropy decoding method may be similar to the entropy encoding method described above. For example, the entropy decoding method may be an inverse process of the above-described entropy encoding method.
엔트로피 복호화부(210)는 변환 계수 레벨을 복호화하기 위해 변환 계수 스캐닝(Transform Coefficient Scanning) 방법을 통해 1차원의 벡터 형태 계수를 2차원의 블록 형태로 변경할 수 있다. 예를 들어, 업라이트(up right) 스캐닝을 이용하여 블록의 계수를 스캔함으로써 2차원 블록 형태로 변경시킬 수 있다. 변환 유닛의 크기 및 화면 내 예측 모드에 따라 업라이트 스캔 대신 수직 스캔, 수평 스캔이 사용될 수도 있다. 즉, 변환 유닛의 크기 및 화면 내 예측 모드에 따라 업라이트 스캔, 수직 방향 스캔 및 수평 방향 스캔 중 어떠한 스캔 방법이 사용될지 여부를 결정할 수 있다.In order to decode the transform coefficient level, the entropy decoder 210 may change the one-dimensional vector form coefficient into a two-dimensional block form through a transform coefficient scanning method. For example, upright scanning can be used to scan the coefficients of a block to change it into a two-dimensional block shape. Depending on the size of the conversion unit and the intra prediction mode, vertical scan or horizontal scan may be used instead of upright scan. That is, according to the size of the conversion unit and the intra prediction mode, it is possible to determine which scan method among upright scan, vertical scan and horizontal scan is used.
양자화된 변환 계수 레벨은 역양자화부(220)에서 역양자화될 수 있고, 역변환부(230)에서 역변환될 수 있다. 양자화된 변환 계수 레벨이 역양자화 및 역변환 된 결과로서, 복원된 잔여 블록이 생성될 수 있다. 이때, 역양자화부(220)는 양자화된 변환 계수 레벨에 양자화 행렬을 적용할 수 있다.The quantized transform coefficient level may be inversely quantized by the inverse quantizer 220 and inversely transformed by the inverse transformer 230. As a result of the inverse quantization and inverse transformation of the quantized transform coefficient level, a reconstructed residual block may be generated. In this case, the inverse quantization unit 220 may apply a quantization matrix to the quantized transform coefficient level.
인트라 모드가 사용되는 경우, 인트라 예측부(240)는 복호화 대상 블록 주변의 이미 복호화된 블록의 픽셀 값을 이용하는 공간적 예측을 수행함으로써 예측 블록을 생성할 수 있다.When the intra mode is used, the intra predictor 240 may generate a prediction block by performing spatial prediction using pixel values of blocks that are already decoded around the decoding target block.
인터 모드가 사용되는 경우, 움직임 보상부(250)는 움직임 벡터 및 참조 픽처 버퍼(270)에 저장되어 있는 참조 영상을 이용하는 움직임 보상을 수행함으로써 예측 블록을 생성할 수 있다. 상기 움직임 보상부(250)는 움직임 벡터의 값이 정수 값을 가지지 않을 경우에 참조 영상 내의 일부 영역에 대해 보간 필터(Interpolation Filter)를 적용하여 예측 블록을 생성할 수 있다. 움직임 보상을 수행하기 위해 부호화 유닛을 기준으로 해당 부호화 유닛에 포함된 예측 유닛의 움직임 보상 방법이 스킵 모드(Skip Mode), 머지 모드(Merge mode), AMVP 모드(AMVP Mode), 현재 픽처 참조 모드 중 어떠한 방법인지 여부를 판단할 수 있고, 각 모드에 따라 움직임 보상을 수행할 수 있다. 여기서, 현재 픽처 참조 모드는 복호화 대상 블록이 속한 현재 픽처 내의 기-복원된 영역을 이용한 예측 모드를 의미할 수 있다. 상기 기-복원된 영역을 특정하기 위해 현재 픽처 참조 모드를 위한 움직임 벡터가 이용될 수 있다. 복호화 대상 블록이 현재 픽처 참조 모드로 부호화된 블록인지 여부를 나타내는 플래그 혹은 인덱스가 시그널링(signaling)될 수도 있고, 복호화 대상 블록의 참조 영상 색인을 통해 유추될 수도 있다. 현재 픽처 참조 모드를 현재 픽처는 복호화 대상 블록을 위한 참조 영상 리스트 내에서 고정된 위치(예를 들어, 참조 영상 색인이 0인 위치 또는 가장 마지막 위치)에 존재할 수 있다. 또는, 참조 영상 리스트 내에 가변적으로 위치할 수도 있으며, 이를 위해 현재 픽처의 위치를 나타내는 별도의 참조 영상 색인이 시그널링될 수도 있다. 여기서, 플래그 혹은 인덱스를 시그널링한다는 것은 인코더에서는 해당 플래그 혹은 인덱스를 엔트로피 부호화(Entropy Encoding)하여 비트스트림(Bitstream)에 포함하는 것을 의미할 수 있고, 디코더에서는 비트스트림으로부터 해당 플래그 혹은 인덱스를 엔트로피 복호화(Entropy Decoding)하는 것을 의미할 수 있다.When the inter mode is used, the motion compensator 250 may generate a predictive block by performing motion compensation using a reference vector stored in the motion vector and the reference picture buffer 270. When the value of the motion vector does not have an integer value, the motion compensator 250 may generate a prediction block by applying an interpolation filter to a portion of the reference image. In order to perform motion compensation, a motion compensation method of a prediction unit included in a coding unit is selected from among skip mode, merge mode, AMVP mode, and current picture reference mode. It may be determined whether or not it is a method, and motion compensation may be performed according to each mode. Here, the current picture reference mode may mean a prediction mode using a pre-restored region in the current picture to which the decoding target block belongs. A motion vector for the current picture reference mode may be used to specify the pre-restored region. A flag or index indicating whether the decoding object block is a block encoded in the current picture reference mode may be signaled or inferred through a reference picture index of the decoding object block. In the current picture reference mode, the current picture may exist at a fixed position (eg, the position at which the reference image index is 0 or the last position) in the reference image list for the decoding object block. Alternatively, the reference picture index may be variably positioned in the reference picture list, and a separate reference picture index indicating the location of the current picture may be signaled for this purpose. Here, signaling a flag or index may mean that the encoder entropy encodes the flag or index and includes the flag or index in the bitstream, and the decoder entropy decodes the corresponding flag or index from the bitstream. Entropy Decoding).
복원된 잔여 블록 및 예측 블록은 가산기(255)를 통해 더해질 수 있다. 복원된 잔여 블록 및 예측 블록이 더해짐에 따라 생성된 블록은 필터부(260)를 거칠 수 있다. 필터부(260)는 디블록킹 필터, 샘플 적응적 오프셋 및 적응적 루프 필터 중 적어도 하나 이상을 복원 블록 또는 복원 영상에 적용할 수 있다. 필터부(260)는 복원 영상을 출력할 수 있다. 복원 영상은 참조 픽처 버퍼(270)에 저장되어 인터 예측에 사용될 수 있다.The reconstructed residual block and the prediction block may be added through the adder 255. As the reconstructed residual block and the prediction block are added, the generated block may pass through the filter unit 260. The filter unit 260 may apply at least one or more of a deblocking filter, a sample adaptive offset, and an adaptive loop filter to the reconstructed block or the reconstructed image. The filter unit 260 may output the reconstructed image. The reconstructed picture may be stored in the reference picture buffer 270 and used for inter prediction.
도 3은 영상을 부호화 및 복호화할 때의 영상의 분할 구조를 개략적으로 나타내는 도면이다. 도 3은 하나의 유닛이 복수의 하위 유닛으로 분할되는 실시예를 개략적으로 나타낸다.3 is a diagram schematically illustrating a division structure of an image when encoding and decoding an image. 3 schematically shows an embodiment in which one unit is divided into a plurality of sub-units.
영상을 효율적으로 분할하기 위해, 부호화 및 복호화에 있어서, 부호화 유닛(Coding Unit; CU)이 사용될 수 있다. 여기서 부호화 유닛은 코딩 유닛을 의미할 수 있다. 유닛은 1) 구문 요소(syntax element) 및 2) 영상 샘플들을 포함하는 블록을 합쳐서 지칭하는 용어일 수 있다. 예를 들면, "유닛의 분할"은 "유닛에 해당하는 블록의 분할"을 의미할 수 있다. 블록 분할 정보에는 유닛의 깊이(depth)에 관한 정보가 포함될 수 있다. 깊이 정보는 유닛이 분할되는 회수 및/또는 정도를 나타낼 수 있다.In order to efficiently divide an image, a coding unit (CU) may be used in encoding and decoding. Here, the coding unit may mean a coding unit. A unit may be a term that collectively refers to a block including 1) a syntax element and 2) image samples. For example, "division of a unit" may mean "division of a block corresponding to a unit". The block division information may include information about a depth of a unit. The depth information may indicate the number and / or degree of division of the unit.
도 3을 참조하면, 영상(300)은 최대 부호화 유닛(Largest Coding Unit; LCU) 단위로 순차적으로 분할되고, LCU 단위로 분할 구조가 결정된다. 여기서, LCU는 부호화 트리 유닛(Coding Tree Unit; CTU)과 동일한 의미로 사용될 수 있다. 하나의 유닛은 트리 구조(tree structure)를 기초로 깊이 정보(depth)를 가지고 계층적으로 분할될 수 있다. 각각의 분할된 하위 유닛은 깊이 정보를 가질 수 있다. 상기 깊이 정보는 유닛이 분할된 회수 및/또는 정도를 나타내므로, 상기 하위 유닛의 크기에 관한 정보를 포함할 수도 있다.Referring to FIG. 3, the image 300 is sequentially divided into units of a largest coding unit (LCU), and a split structure is determined by units of an LCU. Here, the LCU may be used as the same meaning as a coding tree unit (CTU). One unit may be hierarchically divided with depth information based on a tree structure. Each divided subunit may have depth information. Since the depth information indicates the number and / or degree of division of the unit, the depth information may include information about the size of the sub-unit.
분할 구조는 LCU(310) 내에서의 부호화 유닛(Coding Unit; CU)의 분포를 의미할 수 있다. CU는 영상을 효율적으로 부호화/복호화하기 위한 유닛일 수 있다. 이러한 분포는 하나의 CU를 복수(2, 4, 8, 16 등을 포함하는 2 이상의 양의 정수)의 CU들로 분할할지 여부에 따라 결정할 수 있다. 분할에 의해 생성된 CU의 가로 크기 및 세로 크기는 각각 분할 전의 CU의 가로 크기의 절반 및 세로 크기의 절반이거나, 분할된 개수에 따라 분할 전의 CU의 가로 크기보다 작은 크기 및 세로 크기보다 작은 크기를 가질 수 있다. 분할된 CU는 동일한 방식으로 가로 크기 및 세로 크기가 감소된 복수의 CU로 재귀적으로 분할될 수 있다.The partition structure may mean a distribution of a coding unit (CU) in the LCU 310. The CU may be a unit for efficiently encoding / decoding an image. This distribution may be determined according to whether to divide one CU into a plurality of CUs (two or more positive integers including 2, 4, 8, 16, etc.). The horizontal and vertical sizes of the CUs created by splitting are either half of the horizontal and vertical sizes of the CU before splitting, or smaller than the horizontal and vertical sizes of the CU before splitting, depending on the number of splits. Can have The partitioned CU may be recursively divided into a plurality of CUs having reduced horizontal and vertical sizes in the same manner.
이때, CU의 분할은 기정의된 깊이까지 재귀적으로 이루어질 수 있다. 깊이 정보는 CU의 크기를 나타내는 정보일 수 있고, 각 CU마다 저장될 수 있다. 예컨대, LCU의 깊이는 0일 수 있고, 최소 부호화 유닛(Smallest Coding Unit; SCU)의 깊이는 기정의된 최대 깊이일 수 있다. 여기서, LCU는 상술된 것과 같이 최대의 부호화 유닛 크기를 가지는 부호화 유닛일 수 있고, SCU는 최소의 부호화 유닛 크기를 가지는 부호화 유닛일 수 있다. At this time, partitioning of the CU may be performed recursively up to a predetermined depth. The depth information may be information indicating the size of a CU and may be stored for each CU. For example, the depth of the LCU may be 0, and the depth of the smallest coding unit (SCU) may be a predefined maximum depth. Here, the LCU may be a coding unit having a maximum coding unit size as described above, and the SCU may be a coding unit having a minimum coding unit size.
LCU(310)로부터 분할이 시작되고, 분할에 의해 CU의 가로 크기 및 세로 크기가 줄어들 때마다 CU의 깊이는 1씩 증가한다. 각각의 깊이 별로, 분할되지 않는 CU는 2Nx2N 크기를 가질 수 있다. 분할되는 CU의 경우, 2Nx2N 크기의 CU가 NxN 크기를 가지는 복수의 CU들로 분할될 수 있다. N의 크기는 깊이가 1씩 증가할 때마다 절반으로 감소한다. The division starts from the LCU 310, and the depth of the CU increases by one each time the division reduces the horizontal and vertical sizes of the CU. For each depth, the CU that is not divided may have a size of 2N × 2N. In the case of a partitioned CU, a 2N × 2N sized CU may be divided into a plurality of CUs having an N × N size. The magnitude of N decreases in half for every 1 increase in depth.
예를 들어, 하나의 부호화 유닛이 4개의 부호화 유닛으로 분할 될 경우, 분할된 4개의 부호화 유닛의 가로 및 세로 크기는 분할되기 전 부호화 유닛의 가로 및 세로 크기와 비교하여 각각 절반의 크기를 가질 수 있다. 일 예로, 32x32 크기의 부호화 유닛이 4개의 부호화 유닛으로 분할 될 경우, 분할된 4개의 부호화 유닛은 각각 16x16의 크기를 가질 수 있다. 하나의 부호화 유닛이 4개의 부호화 유닛으로 분할 될 경우, 부호화 유닛은 쿼드트리(quad-tree) 형태로 분할되었다고 할 수 있다.For example, when one coding unit is divided into four coding units, the horizontal and vertical sizes of the divided four coding units may each have a size of half compared to the horizontal and vertical sizes of the coding unit before being split. have. For example, when a 32x32 sized coding unit is divided into four coding units, the four divided coding units may each have a size of 16x16. When one coding unit is divided into four coding units, it may be said that the coding unit is divided into quad-tree shapes.
예를 들어, 하나의 부호화 유닛이 2개의 부호화 유닛으로 분할 될 경우, 분할된 2개의 부호화 유닛의 가로 혹은 세로 크기는 분할되기 전 부호화 유닛의 가로 혹은 세로 크기와 비교하여 절반의 크기를 가질 수 있다. 일 예로, 32x32 크기의 부호화 유닛이 2개의 부호화 유닛으로 세로로 분할 될 경우, 분할된 2개의 부호화 유닛은 각각 16x32의 크기를 가질 수 있다. 일 예로, 32x32 크기의 부호화 유닛이 2개의 부호화 유닛으로 가로로 분할 될 경우, 분할된 2개의 부호화 유닛은 각각 32x16의 크기를 가질 수 있다. 하나의 부호화 유닛이 2개의 부호화 유닛으로 분할 될 경우, 부호화 유닛은 이진트리(binary-tree) 형태로 분할되었다고 할 수 있다.For example, when one coding unit is divided into two coding units, the horizontal or vertical size of the divided two coding units may have a half size compared to the horizontal or vertical size of the coding unit before splitting. . As an example, when a 32x32 coding unit is vertically divided into two coding units, the two split coding units may have a size of 16x32. For example, when a 32x32 size coding unit is horizontally divided into two coding units, the two divided coding units may each have a size of 32x16. When one coding unit is divided into two coding units, it may be said that the coding unit is divided into a binary-tree.
도 3을 참조하면, 깊이가 0인 LCU는 64x64 화소들일 수 있다. 0은 최소 깊이일 수 있다. 깊이가 3인 SCU는 8x8 화소들일 수 있다. 3은 최대 깊이일 수 있다. 이때, LCU인 64x64 화소들의 CU는 깊이 0으로 표현될 수 있다. 32x32 화소들의 CU는 깊이 1로 표현될 수 있다. 16x16 화소들의 CU는 깊이 2로 표현될 수 있다. SCU인 8x8 화소들의 CU는 깊이 3으로 표현될 수 있다. Referring to FIG. 3, an LCU having a depth of 0 may be 64 × 64 pixels. 0 may be the minimum depth. An SCU of depth 3 may be 8x8 pixels. 3 may be the maximum depth. In this case, a CU of 64x64 pixels, which is an LCU, may be represented by a depth of zero. A CU of 32x32 pixels may be represented by depth one. A CU of 16 × 16 pixels may be represented by depth two. A CU of 8x8 pixels, which is an SCU, may be represented by depth 3.
또한, CU가 분할되는지 여부에 대한 정보는 CU의 분할 정보를 통해 표현될 수 있다. 분할 정보는 1비트의 정보일 수 있다. SCU를 제외한 모든 CU는 분할 정보를 포함할 수 있다. 예를 들면, 분할 정보의 값이 0이면, CU가 분할되지 않을 수 있고, 분할 정보의 값이 1이면, CU가 분할될 수 있다.In addition, information on whether the CU is split may be expressed through split information of the CU. The split information may be 1 bit of information. All CUs except the SCU may include partition information. For example, if the value of the partition information is 0, the CU may not be split. If the value of the partition information is 1, the CU may be split.
도 4는 부호화 유닛(CU)이 포함할 수 있는 예측 유닛(PU)의 형태를 도시한 도면이다.FIG. 4 is a diagram illustrating a form of a prediction unit PU that may be included in the coding unit CU.
LCU로부터 분할된 CU 중 더 이상 분할되지 않는 CU는 하나 이상의 예측 유닛(Prediction Unit; PU)들로 나뉘어질 수 있다. 이러한 처리 또한 분할로 칭해질 수 있다.A CU that is no longer split among CUs partitioned from the LCU may be divided into one or more prediction units (PUs). This process may also be called division.
PU는 예측에 대한 기본 단위일 수 있다. PU는 스킵(skip) 모드, 화면 간 모드 및 화면 내 모드 중 어느 하나로 부호화 및 복호화될 수 있다. PU는 모드에 따라서 다양한 형태로 분할될 수 있다.The PU may be a basic unit for prediction. The PU may be encoded and decoded in any one of a skip mode, an inter screen mode, and an intra screen mode. The PU may be divided into various forms according to modes.
또한, 부호화 유닛은 예측 유닛으로 분할되지 않고, 부호화 유닛과 예측 유닛은 동일한 크기를 가질 수 있다.Also, the coding unit may not be divided into prediction units, and the coding unit and the prediction unit may have the same size.
도 4에서 도시된 것과 같이, 스킵 모드에서는, CU 내에 분할이 존재하지 않을 수 있다. 스킵 모드에서는 분할 없이 CU와 동일한 크기를 갖는 2Nx2N 모드(410)가 지원될 수 있다.As shown in FIG. 4, in the skip mode, there may be no partition in the CU. In the skip mode, the 2N × 2N mode 410 having the same size as the CU without splitting may be supported.
화면 간 모드에서는, CU 내에서 8가지로 분할된 형태들이 지원될 수 있다. 예를 들면, 화면 간 모드에서는 2Nx2N 모드(410), 2NxN 모드(415), Nx2N 모드(420), NxN 모드(425), 2NxnU 모드(430), 2NxnD 모드(435), nLx2N 모드(440) 및 nRx2N 모드(445)가 지원될 수 있다. 화면 내 모드에서는, 2Nx2N 모드(410) 및 NxN 모드(425)가 지원될 수 있다.In the inter-screen mode, eight divided forms in the CU can be supported. For example, in the inter-screen mode, 2Nx2N mode 410, 2NxN mode 415, Nx2N mode 420, NxN mode 425, 2NxnU mode 430, 2NxnD mode 435, nLx2N mode 440, and nRx2N mode 445 may be supported. In the in-screen mode, 2Nx2N mode 410 and NxN mode 425 may be supported.
하나의 부호화 유닛은 하나 이상의 예측 유닛으로 분할될 수 있고, 하나의 예측 유닛도 하나 이상의 예측 유닛으로 분할 될 수 있다.One coding unit may be split into one or more prediction units, and one prediction unit may also be split into one or more prediction units.
예를 들어, 하나의 예측 유닛이 4개의 예측 유닛으로 분할 될 경우, 분할된 4개의 예측 유닛의 가로 및 세로 크기는 분할되기 전 예측 유닛의 가로 및 세로 크기와 비교하여 각각 절반의 크기를 가질 수 있다. 일 예로, 32x32 크기의 예측 유닛이 4개의 예측 유닛으로 분할 될 경우, 분할된 4개의 예측 유닛은 각각 16x16의 크기를 가질 수 있다. 하나의 예측 유닛이 4개의 예측 유닛으로 분할 될 경우, 예측 유닛은 쿼드트리(quad-tree) 형태로 분할되었다고 할 수 있다.For example, when one prediction unit is divided into four prediction units, the horizontal and vertical sizes of the divided four prediction units may each have a size of half compared to the horizontal and vertical sizes of the prediction unit before splitting. have. For example, when a 32x32 size prediction unit is split into four prediction units, the four divided prediction units may each have a size of 16x16. When one prediction unit is divided into four prediction units, it may be said that the prediction unit is divided into quad-trees.
예를 들어, 하나의 예측 유닛이 2개의 예측 유닛으로 분할 될 경우, 분할된 2개의 예측 유닛의 가로 혹은 세로 크기는 분할되기 전 예측 유닛의 가로 혹은 세로 크기와 비교하여 절반의 크기를 가질 수 있다. 일 예로, 32x32 크기의 예측 유닛이 2개의 예측 유닛으로 세로로 분할 될 경우, 분할된 2개의 예측 유닛은 각각 16x32의 크기를 가질 수 있다. 일 예로, 32x32 크기의 예측 유닛이 2개의 예측 유닛으로 가로로 분할 될 경우, 분할된 2개의 예측 유닛은 각각 32x16의 크기를 가질 수 있다. 하나의 예측 유닛이 2개의 예측 유닛으로 분할 될 경우, 예측 유닛은 이진트리(binary-tree) 형태로 분할되었다고 할 수 있다.For example, when one prediction unit is divided into two prediction units, the horizontal or vertical size of the divided two prediction units may have a half size compared to the horizontal or vertical size of the prediction unit before splitting. . For example, when a 32x32 size prediction unit is vertically divided into two prediction units, the two divided prediction units may each have a size of 16x32. For example, when a 32x32 size prediction unit is horizontally divided into two prediction units, the two divided prediction units may each have a size of 32x16. When one prediction unit is divided into two prediction units, it may be said that the prediction unit is divided into a binary-tree.
도 5는 부호화 유닛(CU)이 포함할 수 있는 변환 유닛(TU)의 형태를 도시한 도면이다.FIG. 5 is a diagram illustrating a form of a transform unit (TU) that a coding unit CU may include.
변환 유닛(Transform Unit; TU)은 CU 내에서 변환, 양자화, 역변환 및 역양자화의 과정을 위해 사용되는 기본 단위일 수 있다. TU는 정사각형 형태 또는 직사각형 등의 형태를 가질 수 있다. TU는 CU의 크기 및/또는 형태에 의존적으로(dependent) 결정될 수도 있다.A transform unit (TU) may be a basic unit used for a process of transform, quantization, inverse transform, and inverse quantization in a CU. The TU may have a shape such as a square shape or a rectangle. The TU may be determined dependent on the size and / or shape of the CU.
LCU로부터 분할된 CU 중, 더 이상 CU들로 분할되지 않는 CU는 하나 이상의 TU들로 분할될 수 있다. 이때, TU의 분할 구조는 쿼드트리(quad-tree) 구조일 수 있다. 예컨대, 도 5에서 도시된 것과 같이, 하나의 CU(510)가 쿼드트리 구조에 따라서 한 번 혹은 그 이상 분할될 수 있다. 하나의 CU가 한 번 이상으로 분할 될 경우 재귀적으로 분할된다고 할 수 있다. 분할을 통해, 하나의 CU(510)는 다양한 크기의 TU들로 구성될 수 있다. 또는, CU를 분할하는 수직 선(vertical line) 및/또는 수평 선(horizontal line)의 개수에 기초하여 하나 이상의 TU로 분할될 수도 있다. CU는 대칭형의 TU로 분할될 수도 있고, 비대칭형의 TU로 분할될 수도 있다. 비대칭형의 TU로의 분할을 위해 TU의 크기/형태에 관한 정보가 시그널링될 수도 있고, CU의 크기/형태에 관한 정보로부터 유도될 수도 있다.Of the CUs partitioned from the LCU, a CU that is no longer split into CUs may be split into one or more TUs. In this case, the partition structure of the TU may be a quad-tree structure. For example, as shown in FIG. 5, one CU 510 may be divided one or more times according to the quadtree structure. If a CU is split more than once, it can be said to be split recursively. Through division, one CU 510 may be configured with TUs of various sizes. Or, it may be divided into one or more TUs based on the number of vertical lines and / or horizontal lines dividing the CU. The CU may be divided into symmetrical TUs and may be divided into asymmetrical TUs. Information about the size / shape of the TU may be signaled for division into an asymmetric TU and may be derived from information about the size / shape of the CU.
또한, 부호화 유닛은 변환 유닛으로 분할되지 않고, 부호화 유닛과 변환 유닛은 동일한 크기를 가질 수 있다.Also, the coding unit may not be divided into a transform unit, and the coding unit and the transform unit may have the same size.
하나의 부호화 유닛은 하나 이상의 변환 유닛으로 분할될 수 있고, 하나의 변환 유닛도 하나 이상의 변환 유닛으로 분할 될 수 있다.One coding unit may be split into one or more transform units, and one transform unit may also be split into one or more transform units.
예를 들어, 하나의 변환 유닛이 4개의 변환 유닛으로 분할 될 경우, 분할된 4개의 변환 유닛의 가로 및 세로 크기는 분할되기 전 변환 유닛의 가로 및 세로 크기와 비교하여 각각 절반의 크기를 가질 수 있다. 일 예로, 32x32 크기의 변환 유닛이 4개의 변환 유닛으로 분할 될 경우, 분할된 4개의 변환 유닛은 각각 16x16의 크기를 가질 수 있다. 하나의 변환 유닛이 4개의 변환 유닛으로 분할 될 경우, 변환 유닛은 쿼드트리(quad-tree) 형태로 분할되었다고 할 수 있다.For example, when one transform unit is divided into four transform units, the horizontal and vertical sizes of the divided four transform units may each have a size of half compared to the horizontal and vertical sizes of the transform unit before splitting. have. For example, when a 32x32 transform unit is divided into four transform units, the divided four transform units may have a size of 16x16. When one transform unit is divided into four transform units, it may be said that the transform unit is divided into quad-trees.
예를 들어, 하나의 변환 유닛이 2개의 변환 유닛으로 분할 될 경우, 분할된 2개의 변환 유닛의 가로 혹은 세로 크기는 분할되기 전 변환 유닛의 가로 혹은 세로 크기와 비교하여 절반의 크기를 가질 수 있다. 일 예로, 32x32 크기의 변환 유닛이 2개의 변환 유닛으로 세로로 분할 될 경우, 분할된 2개의 변환 유닛은 각각 16x32의 크기를 가질 수 있다. 일 예로, 32x32 크기의 변환 유닛이 2개의 변환 유닛으로 가로로 분할 될 경우, 분할된 2개의 변환 유닛은 각각 32x16의 크기를 가질 수 있다. 하나의 변환 유닛이 2개의 변환 유닛으로 분할 될 경우, 변환 유닛은 이진트리(binary-tree) 형태로 분할되었다고 할 수 있다.For example, when one transform unit is divided into two transform units, the horizontal or vertical size of the divided two transform units may be half the size of the transform unit before the split. . For example, when a 32x32 transform unit is vertically divided into two transform units, the two divided transform units may have a size of 16x32. For example, when a 32x32 transform unit is horizontally divided into two transform units, the divided two transform units may each have a size of 32x16. When one transform unit is divided into two transform units, the transform unit may be said to be divided into a binary-tree.
변환 수행 시 잔여 블록을 기-정의된 복수의 변환 방법 중 적어도 하나를 사용하여 변환 시킬 수 있다. 일예로, 기-정의된 복수의 변환 방법으로 DCT(Discrete Cosine Transform), DST(Discrete Sine Transform) 또는 KLT 등이 이용될 수 있다. 잔여 블록을 변환하기 위해 어떤 변환 방법이 적용되는지는 예측 유닛의 화면 간 예측 모드 정보, 화면 내 예측 모드 정보, 변환 블록의 크기/형태 중 적어도 하나를 이용하여 결정될 수도 있고, 일정한 경우 변환 방법을 지시하는 정보가 시그널링될 수도 있다.When performing the transformation, the residual block may be transformed using at least one of a plurality of pre-defined transformation methods. For example, Discrete Cosine Transform (DCT), Discrete Sine Transform (DST), or KLT may be used as a plurality of pre-defined transformation methods. Which transformation method is applied to transform the residual block may be determined using at least one of inter prediction mode information of the prediction unit, intra prediction mode information, and size / shape of the transform block, and in some cases, indicates a transformation method. The information may be signaled.
도 6은 화면 내 예측 과정의 실시예를 설명하기 위한 도면이다.6 is a diagram for explaining an embodiment of an intra prediction process.
화면 내 예측 모드는 비방향성 모드 또는 방향성 모드일 수 있다. 비방향성 모드는 DC 모드 또는 Planar 모드일 수 있으며, 방향성 모드는 특정한 방향 또는 각도를 가지는 예측 모드로 개수는 하나 이상의 M개 일 수 있다. 상기 방향성 모드는 모드 번호, 모드 값, 모드 숫자, 모드 각도 중 적어도 하나로 표현될 수 있다.The intra prediction mode may be a non-directional mode or a directional mode. The non-directional mode may be a DC mode or a planar mode, and the directional mode may be a prediction mode having a specific direction or angle, and the number may be one or more M. The directional mode may be expressed by at least one of a mode number, a mode value, a mode number, and a mode angle.
화면 내 예측 모드의 개수는 상기 비방향성 및 방향성 모드를 포함하는 하나 이상의 N개 일 수 있다.The number of intra prediction modes may be one or more N including the non-directional and directional modes.
화면 내 예측 모드의 개수는 블록의 크기에 따라 다를 수 있다. 예를 들어, 블록의 크기가 4x4 또는 8x8 인 경우에는 67개, 16x16인 경우에는 35개, 32x32인 경우에는 19개, 64x64인 경우에는 7개 일 수 있다.The number of intra prediction modes may vary depending on the size of the block. For example, the size of a block may be 67 pieces in case of 4x4 or 8x8, 35 pieces in case of 16x16, 19 pieces in case of 32x32, and 7 pieces in case of 64x64.
화면 내 예측 모드의 개수는 블록의 크기에 관계없이 N개로 고정될 수 있다. 예를 들어, 블록의 크기에 관계없이 35개 또는 67개 중 적어도 하나로 고정될 수 있다.The number of intra prediction modes may be fixed to N regardless of the size of the block. For example, it may be fixed to at least one of 35 or 67 regardless of the size of the block.
화면 내 예측 모드의 개수는 색 성분(color component)의 타입에 따라 상이할 수 있다. 예를 들면, 색 성분이 휘도(luma) 신호인지 아니면 색차(chroma) 신호인지에 따라 예측 모드의 개수가 다를 수 있다.The number of intra prediction modes may vary depending on the type of color component. For example, the number of prediction modes may vary depending on whether the color component is a luma signal or a chroma signal.
화면 내 부호화 및/또는 복호화는 주변의 복원된 블록에 포함되는 샘플 값 또는 부호화 파라미터를 이용하여 수행될 수 있다.Intra picture encoding and / or decoding may be performed using sample values or encoding parameters included in neighboring reconstructed blocks.
현재 블록을 화면 내 예측으로 부호화/복호화 하기 위해 주변의 복원된 블록에 포함되는 샘플들이 부호화/복호화 대상 블록의 참조 샘플로 이용 가능한지 여부를 검사하는 단계가 수행될 수 있다. 부호화/복호화 대상 블록의 참조 샘플로 이용할 수 없는 샘플들이 존재할 경우, 주변의 복원된 블록에 포함된 샘플들 중 적어도 하나 이상을 이용하여 참조 샘플로 이용할 수 없는 샘플들에 샘플 값을 복사 및/또는 보간(interpolation)하여 부호화/복호화 대상 블록의 참조 샘플로 이용할 수 있다.In order to encode / decode the current block by intra prediction, a step of checking whether samples included in neighboring reconstructed blocks are available as reference samples of the encoding / decoding target block may be performed. If there are samples that are not available as reference samples of the block to be encoded / decoded, at least one or more of the samples included in the neighboring reconstructed blocks are used to copy and / or sample values to samples that are not available as reference samples. Interpolation may be used as a reference sample of a block to be encoded / decoded.
화면 내 예측 시 화면 내 예측 모드 및 부호화/복호화 대상 블록의 크기 중 적어도 하나 이상에 기반하여 참조 샘플 또는 예측 샘플 중 적어도 하나에 필터를 적용할 수 있다. 이때, 부호화/복호화 대상 블록은 현재 블록을 의미할 수 있으며, 부호화 블록, 예측 블록, 변환 블록 중 적어도 하나 이상을 의미할 수 있다. 참조 샘플 또는 예측 샘플에 적용되는 필터의 종류는 현재 블록의 화면 내 예측 모드 또는 크기/형태 중 적어도 하나 이상에 따라 상이할 수 있다. 상기 필터의 종류는 필터 탭 수, 필터 계수 값 또는 필터 강도 중 적어도 하나 이상에 따라 다를 수 있다.During intra prediction, a filter may be applied to at least one of a reference sample or a prediction sample based on at least one of an intra prediction mode and a size of an encoding / decoding target block. In this case, the encoding / decoding target block may mean a current block and may mean at least one of a coding block, a prediction block, and a transform block. The type of filter applied to the reference sample or the prediction sample may be different according to at least one or more of an intra prediction mode or a size / shape of the current block. The type of filter may vary depending on at least one of the number of filter taps, a filter coefficient value, or a filter strength.
화면 내 예측 모드 중 비방향성 플래너(Planar) 모드는 대상 부호화/복호화 블록의 예측 블록을 생성할 때, 예측 블록 내 샘플값을 샘플 위치에 따라 현재 샘플의 상단 참조 샘플, 현재 샘플의 좌측 참조 샘플, 현재 블록의 우상단 참조 샘플 현재 블록의 좌하단 참조 샘플의 가중치 합으로 생성할 수 있다. In the intra prediction mode, the non-directional planar mode generates a predicted block of a target encoding / decoding block. The upper right reference sample of the current block may be generated as a weighted sum of the lower left reference samples of the current block.
화면 내 예측 모드 중 비방향성 DC 모드는 대상 부호화/복호화 블록의 예측 블록을 생성할 때, 현재 블록의 상단 참조 샘플들과 현재 블록의 좌측 참조 샘플들의 평균 값으로 생성 할 수 있다. 또한, 부호화/복호화 블록 내 참조 샘플과 인접한 하나 또는 그 이상의 상단 행들 및 하나 또는 그 이상의 왼쪽 열들에 대해서는 참조 샘플 값들을 이용하여 필터링을 수행 할 수도 있다.Among the intra prediction modes, the non-directional DC mode may be generated as an average value of upper reference samples of the current block and left reference samples of the current block when generating the prediction block of the target coding / decoding block. In addition, one or more upper rows and one or more left columns adjacent to the reference sample in the encoding / decoding block may be filtered using reference sample values.
화면 내 예측 모드 중 복수개의 방향성 모드(angular mode)들의 경우 우상단 및/또는 좌하단 참조 샘플을 이용하여 예측 블록을 생성 할 수 있으며 방향성 모드는 서로 다른 방향성을 가질 수 있다. 예측 샘플 값 생성을 위해 실수 단위의 보간(interpolation)을 수행 할 수도 있다. In the directional modes of the intra prediction modes, the prediction block may be generated by using the upper right and / or lower left reference samples, and the directional modes may have different directions. Real interpolation may be performed to generate predictive sample values.
화면 내 예측 방법을 수행하기 위해 현재 예측 블록의 화면 내 예측 모드는 현재 예측 블록의 주변에 존재하는 예측 블록의 화면 내 예측 모드로부터 예측할 수 있다. 주변 화면 내 예측 모드로부터 예측된 모드 정보를 이용하여 현재 예측 블록의 화면 내 예측 모드를 예측하는 경우, 현재 예측 블록과 주변 예측 블록의 화면 내 예측 모드가 동일하면 소정의 플래그 정보를 이용하여 현재 예측 블록과 주변 예측 블록의 화면 내 예측 모드가 동일하다는 정보를 시그널링할 수 있고, 만약 현재 예측 블록과 주변 예측 블록의 화면 내 예측 모드가 상이하면 엔트로피 부호화를 수행하여 부호화/복호화 대상 블록의 화면 내 예측 모드 정보를 부호화할 수 있다.In order to perform the intra prediction method, the intra prediction mode of the current prediction block may be predicted from the intra prediction mode of the prediction block existing around the current prediction block. In case of predicting the intra prediction mode of the current prediction block by using the mode information predicted from the intra prediction mode, if the intra prediction modes of the current prediction block and the neighboring prediction block are the same, the current prediction is performed by using predetermined flag information. Information on the intra prediction modes of the block and the neighboring prediction block may be signaled. If the intra prediction modes of the current prediction block and the neighboring prediction block are different, entropy encoding may be performed to perform intra prediction of the encoding / decoding target block. Mode information can be encoded.
*도 7은 화면 간 예측 과정의 실시예를 설명하기 위한 도면이다.7 is a diagram for explaining an embodiment of an inter prediction process.
도 7에 도시된 사각형은 영상(또는, 픽처)를 나타낼 수 있다. 또한, 도 7에서 화살표는 예측 방향을 나타낼 수 있다. 즉, 영상은 예측 방향에 따라 부호화 및/또는 복호화될 수 있다. 각 영상은 부호화 타입에 따라 I 픽처(Intra Picture), P 픽처(Uni-predictive Picture), B 픽처(Bi-predictive Picture) 등으로 분류될 수 있다. 각 픽처는 각 픽처의 부호화 타입에 따라 부호화되고 복호화될 수 있다.The rectangle illustrated in FIG. 7 may represent an image (or a picture). In addition, arrows in FIG. 7 may indicate prediction directions. That is, the image may be encoded and / or decoded according to the prediction direction. Each picture may be classified into an I picture (Intra Picture), a P picture (U-predictive Picture), a B picture (Bi-predictive Picture), and the like. Each picture may be encoded and decoded according to an encoding type of each picture.
부호화의 대상인 영상이 I 픽처인 경우, 영상은 화면 간 예측 없이 영상 자체에 대해 화면 내 부호화될 수 있다. 부호화의 대상인 영상이 P 픽처인 경우, 영상은 순방향으로만 참조 영상을 이용하는 화면 간 예측 혹은 움직임 보상을 통해 부호화될 수 있다. 부호화의 대상인 영상이 B 픽처인 경우, 순방향 및 역방향의 양측으로 참조 픽처들을 이용하는 화면 간 예측 혹은 움직임 보상을 통해 부호화될 수 있으며, 순방향 및 역방향 중 하나의 방향으로 참조 픽처를 이용하는 화면 간 예측 혹은 움직임 보상을 통해 부호화될 수 있다. 여기서, 화면 간 예측 모드가 사용되는 경우, 부호화기에서는 화면 간 예측 혹은 움직임 보상을 수행할 수 있고, 복호화기에서는 그에 대응하는 움직임 보상을 수행할 수 있다. 참조 영상을 이용하여 부호화 및/또는 복호화되는 P 픽처 및 B 픽처의 영상은 화면 간 예측이 사용되는 영상으로 간주될 수 있다.When the image to be encoded is an I picture, the image may be encoded in the picture with respect to the image itself without inter prediction. When the image to be encoded is a P picture, the image may be encoded through inter prediction or motion compensation using the reference image only in the forward direction. If the image to be encoded is a B picture, it may be encoded through inter prediction or motion compensation using reference pictures in both forward and reverse directions, and inter prediction or motion using the reference picture in one of the forward and reverse directions. Can be coded through compensation. In this case, when the inter prediction mode is used, the encoder may perform inter prediction or motion compensation, and the decoder may perform motion compensation corresponding thereto. The pictures of the P picture and the B picture that are encoded and / or decoded using the reference picture may be regarded as a picture using inter prediction.
아래에서, 실시예에 따른 화면 간 예측에 대해 구체적으로 설명된다.Hereinafter, inter prediction according to an embodiment will be described in detail.
화면 간 예측 혹은 움직임 보상은 참조 픽처 및 움직임 정보를 이용하여 수행될 수 있다. 또한, 화면 간 예측은 상술된 스킵 모드를 이용할 수도 있다.Inter prediction or motion compensation may be performed using a reference picture and motion information. In addition, inter prediction may use the skip mode described above.
참조 픽처(reference picture)는 현재 픽처의 이전 픽처 또는 현재 픽처의 이후 픽처 중 적어도 하나일 수 있다. 이때, 화면 간 예측은 참조 픽처에 기반하여 현재 픽처의 블록에 대한 예측을 수행할 수 있다. 여기에서, 참조 픽처는 블록의 예측에 이용되는 영상을 의미할 수 있다. 이때, 참조 픽처 내의 영역은 참조 픽처를 지시하는 참조 영상 색인(reference picture index; refIdx) 및 후술될 움직임 벡터(motion vector) 등을 이용함으로써 특정될 수 있다.The reference picture may be at least one of a previous picture of the current picture or a subsequent picture of the current picture. In this case, the inter prediction may perform prediction on a block of the current picture based on the reference picture. Here, the reference picture may mean an image used for prediction of the block. In this case, an area in the reference picture may be specified by using a reference picture index (refIdx) indicating a reference picture, a motion vector to be described later, and the like.
화면 간 예측은 참조 픽처 및 참조 픽처 내에서 현재 블록에 대응하는 참조 블록을 선택할 수 있고, 선택된 참조 블록을 사용하여 현재 블록에 대한 예측 블록을 생성할 수 있다. 현재 블록은 현재 픽처의 블록들 중 현재 부호화 또는 복호화의 대상인 블록일 수 있다. The inter prediction may select a reference picture corresponding to the current block within the reference picture and the reference picture, and generate a prediction block for the current block using the selected reference block. The current block may be a block targeted for current encoding or decoding among blocks of the current picture.
움직임 정보는 부호화 장치(100) 및 복호화 장치(200)의 각각에 의해 화면 간 예측 중 도출될 수 있다. 또한, 도출된 움직임 정보는 화면 간 예측을 수행하는데 사용될 수 있다. 이때, 부호화 장치(100) 및 복호화 장치(200)는 복원된 주변 블록(reconstructed neighboring block)의 움직임 정보 및/또는 콜 블록(collocated block; col block)의 움직임 정보를 이용함으로써 부호화 및/또는 복호화 효율을 향상시킬 수 있다. 콜 블록은 이미 복원된 콜 픽처(collocated picture; col picture) 내에서 부호화/복호화 대상 블록의 공간적 위치에 대응하는 블록일 수 있다. 복원된 주변 블록은 현재 픽처 내의 블록이면서, 이미 부호화 및/또는 복호화를 통해 복원된 블록일 수 있다. 또한, 복원 블록은 부호화/복호화 대상 블록에 인접한 이웃 블록 및/또는 부호화/복호화 대상 블록의 외부 코너에 위치한 블록일 수 있다. 여기에서, 부호화/복호화 대상 블록의 외부 코너에 위치한 블록이란, 부호화/복호화 대상 블록에 가로로 인접한 이웃 블록에 세로로 인접한 블록 또는 부호화/복호화 대상 블록에 세로로 인접한 이웃 블록에 가로로 인접한 블록일 수 있다.The motion information may be derived during inter prediction by each of the encoding apparatus 100 and the decoding apparatus 200. In addition, the derived motion information may be used to perform inter prediction. In this case, the encoding apparatus 100 and the decoding apparatus 200 use encoding information and / or decoding efficiency by using motion information of a reconstructed neighboring block and / or motion information of a collocated block (col block). Can improve. The call block may be a block corresponding to a spatial position of a block to be encoded / decoded in a collocated picture (col picture). The reconstructed neighboring block may be a block within the current picture and may be a block that is already reconstructed through encoding and / or decoding. The reconstruction block may be a neighboring block adjacent to the encoding / decoding object block and / or a block located at an outer corner of the encoding / decoding object block. Here, the block located at the outer corner of the encoding / decoding target block is a block vertically adjacent to a neighboring block horizontally adjacent to the encoding / decoding target block or a block horizontally adjacent to a neighboring block vertically adjacent to the encoding / decoding target block. Can be.
부호화 장치(100) 및 복호화 장치(200)의 각각은 콜 픽처 내에서 공간적으로 부호화/복호화 대상 블록에 대응하는 위치에 존재하는 블록을 결정할 수 있고, 결정된 블록을 기준으로 기정의된 상대적인 위치를 결정할 수 있다. 기정의된 상대적인 위치는 공간적으로 부호화/복호화 대상 블록에 대응하는 위치에 존재하는 블록의 내부 및/또는 외부의 위치일 수 있다. 또한, 부호화 장치(100) 및 복호화 장치(200)의 각각은 결정된 기정의된 상대적인 위치에 기반하여 콜 블록을 도출할 수 있다. 여기서, 콜 픽처는 참조 픽처 리스트에 포함된 적어도 하나의 참조 픽처 중에서 하나의 픽처일 수 있다.Each of the encoding apparatus 100 and the decoding apparatus 200 may determine a block existing at a position corresponding to a block to be encoded / decoded spatially within a call picture, and determines a predetermined relative position based on the determined block. Can be. The predefined relative position may be a position inside and / or outside of a block existing at a position corresponding to a block to be encoded / decoded spatially. In addition, each of the encoding apparatus 100 and the decoding apparatus 200 may derive a call block based on the determined predetermined relative position. Here, the call picture may be one picture among at least one reference picture included in the reference picture list.
움직임 정보의 도출 방식은 부호화/복호화 대상 블록의 예측 모드에 따라 변할 수 있다. 예를 들면, 화면 간 예측을 위해 적용되는 예측 모드로서, 향상된 움직임 벡터 예측(Advanced Motion Vector Prediction; AMVP) 및 머지 모드(merge mode) 등이 있을 수 있다. 여기서 머지 모드를 움직임 병합 모드(motion merge mode)라고 지칭할 수 있다.The method of deriving the motion information may vary according to the prediction mode of the encoding / decoding target block. For example, as a prediction mode applied for inter prediction, there may be an advanced motion vector prediction (AMVP) and a merge mode. The merge mode may be referred to as a motion merge mode.
예를 들면, 예측 모드로서, AMVP가 적용되는 경우, 부호화 장치(100) 및 복호화 장치(200)의 각각은 복원된 주변 블록의 움직임 벡터 및/또는 콜 블록의 움직임 벡터를 이용하여 움직임 벡터 후보 리스트(motion vector candidate list)를 생성할 수 있다. 복원된 주변 블록의 움직임 벡터 및/또는 콜 블록의 움직임 벡터는 움직임 벡터 후보로 사용될 수 있다. 여기서, 콜 블록의 움직임 벡터를 시간적 움직임 벡터 후보(temporal motion vector candidate)라 지칭할 수 있고, 복원된 주변 블록의 움직임 벡터를 공간적 움직임 벡터 후보(spatial motion vector candidate)라 지칭할 수 있다.For example, when AMVP is applied as the prediction mode, each of the encoding apparatus 100 and the decoding apparatus 200 uses a motion vector of the reconstructed neighboring block and / or a motion vector of the call block. create a motion vector candidate list. The motion vector of the reconstructed neighboring block and / or the motion vector of the call block may be used as a motion vector candidate. Here, the motion vector of the call block may be referred to as a temporal motion vector candidate, and the motion vector of the reconstructed neighboring block may be referred to as a spatial motion vector candidate.
부호화 장치(100)에 의해 생성된 비트스트림은 움직임 벡터 후보 색인(motion vector candidate index)를 포함할 수 있다. 즉, 부호화 장치(100)은 움직임 벡터 후보 색인을 엔트로피 부호화하여 비트스트림을 생성할 수 있다. 움직임 벡터 후보 색인은 움직임 벡터 후보 리스트에 포함된 움직임 벡터 후보 중에서 선택된 최적의 움직임 벡터 후보를 지시할 수 있다. 움직임 벡터 후보 색인은 비트스트림을 통해 부호화 장치(100)로부터 복호화 장치(200)로 시그널링될 수 있다.The bitstream generated by the encoding apparatus 100 may include a motion vector candidate index. That is, the encoding apparatus 100 may generate a bitstream by entropy encoding a motion vector candidate index. The motion vector candidate index may indicate an optimal motion vector candidate selected from the motion vector candidates included in the motion vector candidate list. The motion vector candidate index may be signaled from the encoding apparatus 100 to the decoding apparatus 200 through the bitstream.
복호화 장치(200)는 움직임 벡터 후보 색인을 비트스트림으로부터 엔트로피 복호화하고, 엔트로피 복호화된 움직임 벡터 후보 색인을 이용하여 움직임 벡터 후보 리스트에 포함된 움직임 벡터 후보 중에서 복호화 대상 블록의 움직임 벡터 후보를 선택할 수 있다.The decoding apparatus 200 may entropy decode the motion vector candidate index from the bitstream, and select the motion vector candidate of the decoding target block from the motion vector candidates included in the motion vector candidate list using the entropy decoded motion vector candidate index. .
부호화 장치(100)는 부호화 대상 블록의 움직임 벡터 및 움직임 벡터 후보 간의 움직임 벡터 차분(MVD: Motion Vector Difference)을 계산할 수 있고, MVD를 엔트로피 부호화할 수 있다. 비트스트림은 엔트로피 부호화된 MVD를 포함할 수 있다. MVD는 비트스트림을 통해 부호화 장치(100)로부터 복호화 장치(200)로 시그널링될 수 있다. 이 때, 복호화 장치(200)는 수신된 MVD를 비트스트림으로부터 엔트로피 복호화할 수 있다. 복호화 장치(200)는 복호화된 MVD 및 움직임 벡터 후보의 합을 통해 복호화 대상 블록의 움직임 벡터를 도출할 수 있다.The encoding apparatus 100 may calculate a motion vector difference (MVD) between the motion vector of the encoding target block and the motion vector candidate, and may entropy encode the MVD. The bitstream may include entropy coded MVD. The MVD may be signaled from the encoding apparatus 100 to the decoding apparatus 200 through the bitstream. At this time, the decoding apparatus 200 may entropy decode the received MVD from the bitstream. The decoding apparatus 200 may derive the motion vector of the decoding object block through the sum of the decoded MVD and the motion vector candidate.
비트스트림은 참조 픽처를 지시하는 참조 영상 색인 등을 포함할 수 있다. 참조 영상 색인은 엔트로피 부호화되어 비트스트림을 통해 부호화 장치(100)로부터 복호화 장치(200)로 시그널링될 수 있다. 복호화 장치(200)는 주변 블록의 움직임 정보들을 이용하여 복호화 대상 블록의 움직임 벡터를 예측할 수 있고, 예측된 움직임 벡터 및 움직임 벡터 차분을 이용하여 복호화 대상 블록의 움직임 벡터를 유도할 수 있다. 복호화 장치(200)는 유도된 움직임 벡터와 참조 영상 색인 정보에 기반하여 복호화 대상 블록에 대한 예측 블록을 생성할 수 있다.The bitstream may include a reference picture index and the like indicating a reference picture. The reference image index may be entropy encoded and signaled from the encoding apparatus 100 to the decoding apparatus 200 through a bitstream. The decoding apparatus 200 may predict the motion vector of the decoding object block using the motion information of the neighboring block, and may derive the motion vector of the decoding object block using the predicted motion vector and the motion vector difference. The decoding apparatus 200 may generate a prediction block for the decoding target block based on the derived motion vector and the reference image index information.
움직임 정보의 도출 방식의 다른 예로, 머지 모드(merge mode)가 있다. 머지 모드란 복수의 블록들에 대한 움직임의 병합을 의미할 수 있다. 머지 모드는 하나의 블록의 움직임 정보를 다른 블록에도 함께 적용시키는 것을 의미할 수 있다. 머지 모드가 적용되는 경우, 부호화 장치(100) 및 복호화 장치(200)의 각각은 복원된 주변 블록의 움직임 정보 및/또는 콜 블록의 움직임 정보를 이용하여 머지 후보 리스트(merge candidate list)를 생성할 수 있다. 움직임 정보는 1) 움직임 벡터, 2) 참조 영상 색인, 및 3) 화면 간 예측 지시자 중 적어도 하나를 포함할 수 있다. 예측 지시자는 단방향 (L0 예측, L1 예측) 또는 쌍방향일 수 있다.Another example of a method of deriving motion information is a merge mode. The merge mode may mean merging of motions for a plurality of blocks. The merge mode may mean applying motion information of one block to other blocks. When the merge mode is applied, each of the encoding apparatus 100 and the decoding apparatus 200 may generate a merge candidate list using the motion information of the reconstructed neighboring block and / or the motion information of the call block. Can be. The motion information may include at least one of 1) a motion vector, 2) a reference picture index, and 3) an inter prediction prediction indicator. The prediction indicator may be unidirectional (L0 prediction, L1 prediction) or bidirectional.
이때, 머지 모드는 CU 단위 또는 PU 단위로 적용될 수 있다. CU 단위 또는 PU 단위로 머지 모드가 수행되는 경우, 부호화 장치(100)는 기정의된 정보를 엔트로피 부호화하여 비트스트림을 생성한 후 복호화 장치(200)로 시그널링할 수 있다. 비트스트림은 기정의된 정보를 포함할 수 있다. 기정의된 정보는, 1) 블록 파티션(partition)별로 머지 모드를 수행할지 여부를 나타내는 정보인 머지 플래그(merge flag), 2) 부호화 대상 블록에 인접한 주변 블록들 중 어떤 블록과 머지를 할 것인가에 대한 정보인 머지 인덱스(merge index)를 포함할 수 있다. 예를 들면, 부호화 대상 블록의 주변 블록들은 부호화 대상 블록의 좌측 인접 블록, 부호화 대상 블록의 상단 인접 블록 및 부호화 대상 블록의 시간적(temporal) 인접 블록 등을 포함할 수 있다.In this case, the merge mode may be applied in a CU unit or a PU unit. When the merge mode is performed in a CU unit or a PU unit, the encoding apparatus 100 may entropy-code predetermined information to generate a bitstream and then signal the decoding apparatus 200. The bitstream may include predefined information. The predefined information includes: 1) a merge flag, which is information indicating whether to perform a merge mode for each block partition, and 2) which one of neighboring blocks adjacent to an encoding target block is merged with. It may include a merge index that is information about the merge. For example, the neighboring blocks of the encoding object block may include a left neighboring block of the encoding object block, an upper neighboring block of the encoding object block, and a temporal neighboring block of the encoding object block.
머지 후보 리스트는 움직임 정보들이 저장된 리스트를 나타낼 수 있다. 또한, 머지 후보 리스트는 머지 모드가 수행되기 전에 생성될 수 있다. 머지 후보 리스트에 저장되는 움직임 정보는, 부호화/복호화 대상 블록에 인접한 주변 블록의 움직임 정보 및 참조 영상에서 부호화/복호화 대상 블록에 대응되는(collocated) 블록의 움직임 정보, 이미 머지 후보 리스트에 존재하는 움직임 정보들의 조합에 의해 생성된 새로운 움직임 정보 및 제로 머지 후보 중 적어도 하나 이상일 수 있다. 여기서, 부호화/복호화 대상 블록에 인접한 주변 블록의 움직임 정보는 공간적 머지 후보(spatial merge candidate) 및 참조 영상에서 부호화/복호화 대상 블록에 대응되는(collocated) 블록의 움직임 정보는 시간적 머지 후보(temporal merge candidate)라 지칭할 수 있다. The merge candidate list may represent a list in which motion information is stored. In addition, the merge candidate list may be generated before the merge mode is performed. The motion information stored in the merge candidate list includes motion information of neighboring blocks adjacent to the encoding / decoding target block, motion information of a block corresponding to the encoding / decoding target block in the reference image, and motion already existing in the merge candidate list. At least one or more of the new motion information and the zero merge candidate generated by the combination of the information. Here, the motion information of the neighboring block adjacent to the encoding / decoding target block is a spatial merge candidate and the motion information of the block corresponding to the encoding / decoding target block in the reference image is a temporal merge candidate. It may be referred to as).
스킵 모드는 주변 블록의 움직임 정보를 그대로 부호화/복호화 대상 블록에 적용하는 모드일 수 있다. 스킵 모드는 화면 간 예측에 이용되는 모드 중 하나일 수 있다. 스킵 모드가 사용되는 경우, 부호화 장치(100)는 어떤 블록의 움직임 정보를 부호화 대상 블록의 움직임 정보로서 이용할 것인지에 대한 정보를 엔트로피 부호화하여 비트스트림을 통해 복호화 장치(200)에 시그널링할 수 있다. 부호화 장치(100)는 다른 정보는 복호화 장치(200)에 시그널링하지 않을 수 있다. 예를 들면, 다른 정보는 구문 요소(syntax element) 정보일 수 있다. 구문 요소 정보는 움직임 벡터 차분 정보, 부호화 블록 플래그 및 변환 계수 레벨 중 적어도 하나 이상을 포함할 수 있다.The skip mode may be a mode in which motion information of a neighboring block is applied to an encoding / decoding target block as it is. The skip mode may be one of modes used for inter prediction. When the skip mode is used, the encoding apparatus 100 may entropy-code information about which block motion information to use as the motion information of the block to be encoded and may signal the decoding apparatus 200 through the bitstream. The encoding apparatus 100 may not signal other information to the decoding apparatus 200. For example, the other information may be syntax element information. The syntax element information may include at least one of motion vector difference information, a coding block flag, and a transform coefficient level.
화면 내 또는 화면간 예측 이후 생성된 잔여 신호는 양자화 과정의 일환으로 변환 과정을 통해 주파수 도메인으로 변환할 수 있다. 이때 수행하는 1차 변환은 DCT type 2 (DCT-II)외에 다양한 DCT, DST 커널을 사용할 수 있으며, 이러한 변환 커널들은 잔여 신호에 대해 수평 및/또는 수직방향에 대해 1차원 변환(1D transform)을 각각 수행하는 분리 변환(Separable transform)으로 변환이 수행될 수도 있고, 또는 2차원 비분리 변환(2D Non-separable transform)으로 변환이 수행될 수 있다. The residual signal generated after intra-picture or inter-screen prediction may be converted into a frequency domain through a conversion process as part of a quantization process. In addition to the DCT type 2 (DCT-II), the first transform may be performed using various DCT and DST kernels, and these transform kernels may perform 1D transform on horizontal and / or vertical directions for the residual signal. The transformation may be performed by a separate transform, each performed, or the transformation may be performed by a 2D non-separable transform.
일예로 변환에 사용되는 DCT, DST type은 아래 표에서와 같이 DCT-II 외에 DCT-V, DCT-VIII, DST-I, DST-VII 를 1D 변환 시 적응적으로 사용할 수 있으며, 예를 들어, 표 1 내지 표 2의 예와 같이 변환 세트(Transform set)을 구성하여 변환에 사용된 DCT 또는 DST 타입을 유도할 수 있다. For example, the DCT and DST types used for the conversion may be adaptively used for 1D conversion of DCT-V, DCT-VIII, DST-I, and DST-VII in addition to DCT-II as shown in the following table. As in the examples of Tables 1 to 2, a transform set may be configured to derive the DCT or DST type used for the transform.
| 변환세트Conversion set |
변환 |
| 00 | DST_VII, DCT-VIIIDST_VII, DCT-VIII |
| 1One |
DST-VII, DST-IDST-VII, DST- |
| 22 | DST-VII, DCT-VDST-VII, DCT-V |
| 변환세트Conversion set |
변환 |
| 00 | DST_VII, DCT-VIII, DST-IDST_VII, DCT-VIII, DST-I |
| 1One |
DST-VII, DST-I, DCT-VIIIDST-VII, DST-I, DCT- |
| 22 | DST-VII, DCT-V, DST-IDST-VII, DCT-V, DST-I |
예를 들어, 도 8과 같이 화면 내 예측 모드에 따라 수평 또는 수직방향에 대해 서로 다른 변환 세트(Transform set)를 정의한 후, 부호화기/복호화기에서 현재 부호화/복호화 대상 블록의 화면 내 예측 모드 및 이에 대응하는 변환 세트에 포함된 변환을 이용하여 변환 및/또는 역변환을 수행할 수 있다. 이 경우, 변환 세트는 엔트로피 부호화/복호화되는 것이 아니라 부호화기/복호화기에서 동일한 규칙에 따라 정의될 수 있다. 이 경우, 해당 변환 세트에 속한 변환들 중에서 어떤 변환이 사용되었는지를 지시하는 엔트로피 부호화/복호화될 수 있다. 예를 들어, 블록의 크기가 64x64 이하인 경우, 화면 내 예측 모드에 따라 표 2의 예와 같이 총 3가지의 변환 세트를 구성하고, 수평 방향 변환과 수직 방향 변환으로 각 3가지의 변환을 이용해서 총 9개의 다중 변환 방법을 조합해서 수행한 후 최적의 변환 방법으로 잔여 신호를 부호화/복호화함으로써 부호화 효율을 향상시킬 수 있다. 이때, 하나의 변환 세트에 속한 3가지의 변환들 중 어떤 변환이 사용되었는지에 대한 정보를 엔트로피 부호화/복호화하기 위해 절삭된 단항(Truncated Unary) 이진화(Binarization)를 사용할 수도 있다. 이때, 수직 변환 및 수평 변환 중 적어도 하나 이상에 대해 변환 세트에 속한 변환들 중 어떤 변환이 사용되었는지를 지시하는 정보가 엔트로피 부호화/복호화될 수 있다.For example, after defining different transform sets for the horizontal or vertical direction according to the intra prediction mode as shown in FIG. 8, the intra prediction mode of the current encoding / decoding target block in the encoder / decoder and the same Transforms and / or inverse transforms may be performed using the transforms included in the corresponding transform set. In this case, the transform set may not be entropy encoded / decoded but may be defined according to the same rules in the encoder / decoder. In this case, entropy encoding / decoding indicating which transform is used among transforms belonging to the corresponding transform set may be performed. For example, if the size of the block is 64x64 or less, three sets of transforms are constructed as shown in the example of Table 2 according to the intra prediction mode, and each of the three transforms is used as a horizontal transform and a vertical transform. After combining a total of nine multi-transformation methods, encoding efficiency can be improved by encoding / decoding a residual signal using an optimal transform method. In this case, truncated Unary binarization may be used to entropy encode / decode information on which of three transforms belonging to one transform set. In this case, information indicating which transform among transforms belonging to a transform set is used for at least one of a vertical transform and a horizontal transform may be entropy encoded / decoded.
부호화기에서는 상기 전술한 1차 변환이 완료된 이후, 도 9의 예와 같이 변환 계수 (Transformed coefficients)에 대한 에너지 집중도를 높이기 위해 2차 변환 (Secondary transform)을 수행할 수 있다. 2차 변환 역시 수평 및/또는 수직방향에 대해 1차원 변환을 각각 수행하는 분리 변환을 수행할 수도 있고, 또는 2차원 비분리 변환을 수행할 수 있으며, 사용된 변환 정보가 시그널링되거나 또는 현재 및 주변 부호화 정보에 따라 부호화기/복호화기에서 묵시적으로 유도될 수 있다. 예를 들어, 1차 변환과 같이 2차 변환에 대한 변환 세트를 정의할 수 있으며, 변환 세트는 엔트로피 부호화/복호화되는 것이 아니라 부호화기/복호화기에서 동일한 규칙에 따라 정의될 수 있다. 이 경우, 해당 변환 세트에 속한 변환 중에서 어떤 변환이 사용되었는지를 지시하는 정보가 시그널링될 수 있으며, 화면 내 또는 화면간 예측을 통한 잔여 신호 중 적어도 하나 이상에 적용될 수 있다.After the above-described first transform is completed, the encoder may perform a secondary transform in order to increase energy concentration of transformed coefficients as shown in the example of FIG. 9. Secondary transforms may also perform split transforms that perform one-dimensional transforms respectively in the horizontal and / or vertical directions, or perform two-dimensional non-separated transforms, and used transform information is signaled or is present and surrounding. It may be implicitly derived from the encoder / decoder according to the encoding information. For example, a transform set for a secondary transform may be defined, such as a primary transform, and the transform set may be defined according to the same rules in the encoder / decoder rather than entropy encoding / decoding. In this case, information indicating which transform is used among the transforms belonging to the corresponding transform set may be signaled and applied to at least one or more of the residual signals through intra-screen or inter-screen prediction.
*변환 세트 별로 변환 후보(transform candidate)의 개수 또는 종류 중 적어도 하나는 상이하며, 변환 후보의 개수 또는 종류 중 적어도 하나는 블록(CU, PU, TU 등)의 위치, 크기, 분할 형태, 예측 모드(intra/inter mode) 또는 화면 내 예측 모드의 방향성/비방향성 중 적어도 하나를 고려하여 가변적으로 결정될 수도 있다.At least one of the number or type of transform candidates is different for each transform set, and at least one of the number or type of transform candidates is the position, size, partition type, prediction mode of a block (CU, PU, TU, etc.). may be variably determined in consideration of at least one of intra / inter mode or directionality / non-direction of the intra prediction mode.
복호화기에서는 2차 역변환 수행 여부에 따라 2차 역변환을 수행할 수 있고, 2차 역변환이 수행된 결과에 1차 역변환 수행 여부에 따라 1차 역변환을 수행할 수 있다.In the decoder, the second inverse transform may be performed according to whether the second inverse transform is performed, and the first inverse transform may be performed according to whether the first inverse transform is performed on the result of the second inverse transform.
상기 전술한 1차 변환 및 2차 변환은 휘도/색차 성분 중 적어도 하나 이상의 신호 성분에 적용되거나 임의의 부호화 블록 크기/형태에 따라 적용될 수 있으며, 임의의 부호화 블록에서 사용여부 및 사용된 1차 변환/2차 변환을 가르키는 인덱스를 엔트로피 부호화/복호화하거나 또는 현재/주변 부호화 정보 중 적어도 하나 이상에 따라 부호화기/복호화기에서 묵시적으로 유도할 수 있다.The above-described first-order transform and second-order transform may be applied to at least one or more signal components of luminance / chromatic components or according to an arbitrary coding block size / shape, and may be used or used in any coding block. An index indicating a / second order transform may be entropy encoded / decoded, or may be implicitly derived from the encoder / decoder according to at least one of current and peripheral encoding information.
화면 내 또는 화면간 예측 이후 생성된 잔여 신호는 1차 및/또는 2차 변환 완료 후, 양자화 과정을 거친 후 양자화된 변환 계수는 엔트로피 부호화 과정을 수행하게 되며, 이때 양자화된 변환 계수는 도 10과 같이 화면 내 예측 모드 또는 최소 블록 크기/형태 중 적어도 하나 이상을 기준으로 대각선, 수직, 수평 방향에 따라 스캐닝(scanning) 될 수 있다.After the first and / or second-order transform is completed, the residual signal generated after intra-picture or inter-screen prediction undergoes a quantization process, and then the quantized transform coefficients undergo an entropy encoding process. Likewise, the image may be scanned in a diagonal, vertical, or horizontal direction based on at least one of an intra prediction mode or a minimum block size / shape.
또한, 엔트로피 복호화된 양자화된 변환 계수는 역 스캐닝(Inverse Scanning)되어 블록 형태로 정렬될 수 있으며, 해당 블록에 역양자화 또는 역 변환 중 적어도 하나 이상이 수행될 수 있다. 이때, 역 스캐닝의 방법으로 대각(Diagonal) 스캔, 수평(Horizontal) 스캔, 수직(Vertical) 스캔 중 적어도 하나가 수행될 수 있다. In addition, the entropy decoded quantized transform coefficients may be inverse scanned and arranged in a block form, and at least one of inverse quantization or inverse transform may be performed on the block. In this case, at least one of a diagonal scan, a horizontal scan, and a vertical scan may be performed as a reverse scanning method.
일예로, 현재 부호화 블록의 크기가 8x8일 때, 8x8 블록에 대한 잔여 신호는 1차, 2차 변환 및 양자화 이후, 4개의 4x4 서브 블록별로 도 10에 도시된 3가지 스캐닝 순서(Scanning order) 방법 중 적어도 하나에 따라 양자화된 변환 계수들을 스캐닝하면서 엔트로피 부호화할 수 있다. 또한 양자화된 변환 계수를 역 스캐닝하면서 엔트로피 복호화할 수 있다. 역 스캐닝된 양자화된 변환 계수는 역양자화 이후 변환 계수가 되고, 2차 역변환 또는 1차 역변환 중 적어도 하나가 수행되어 복원된 잔여 신호가 생성될 수 있다.For example, when the size of the current coding block is 8x8, the residual signal for the 8x8 block is three scanning order methods shown in FIG. 10 for four 4x4 subblocks after the first, second order transform and quantization. Entropy encoding may be performed while scanning the quantized transform coefficients according to at least one of the following. It is also possible to entropy decode while inversely scanning the quantized transform coefficients. The inverse scanned quantized transform coefficients become transform coefficients after inverse quantization, and at least one of a second order inverse transform or a first order inverse transform may be performed to generate a reconstructed residual signal.
비디오 부호화 과정에서 도 11과 같이 하나의 블록이 분할될 수 있으며 분할 정보에 해당하는 지시자가 시그널링 될 수 있다. 이때, 상기 분할 정보는 분할 플래그(split_flag), 쿼드/이진트리 플래그(QB_flag), 쿼드트리 분할 플래그(quadtree_flag), 이진트리 분할 플래그(binarytree_flag), 이진트리 분할 유형 플래그(Btype_flag) 중 적어도 하나 이상일 수 있다. 여기서, split_flag 는 블록이 분할되었는지 여부를 나타내는 플래그, QB_flag 는 블록이 쿼드트리 형태로 분할되었지는 이진트리 형태로 분할되었는지 여부를 나타내는 플래그, quadtree_flag 는 블록이 쿼드트리 형태로 분할되었는지 여부를 나타내는 플래그, binarytree_flag 는 블록이 이진트리 형태로 분할되었는지 여부를 나타내는 플래그, Btype_flag 는 블록이 이진트리 형태로 분할하는 경우 수직 또는 수평 분할임을 나타내는 플래그일 수 있다.In the video encoding process, one block may be split as shown in FIG. 11 and an indicator corresponding to the split information may be signaled. In this case, the split information may be at least one of a split flag (split_flag), a quad / binary tree flag (QB_flag), a quadtree split flag (quadtree_flag), a binary tree split flag (binarytree_flag), and a binary tree split type flag (Btype_flag). have. Here, split_flag is a flag indicating whether a block is divided, QB_flag is a flag indicating whether a block is divided into quadtrees or binary trees, quadtree_flag is a flag indicating whether a block is divided into quadtrees, binarytree_flag may be a flag indicating whether a block is divided into a binary tree form, and Btype_flag may be a flag indicating a vertical or horizontal division when the block is divided into a binary tree form.
상기 분할 플래그가 1이면 분할되었음을 0이면 분할되지 않았음을 나타낼 수 있으며 상기 쿼드/이진트리 플래그의 경우 0이면 쿼드트리 분할, 1이면 이진트리 분할을 나타낼 수 있으며, 반대로 0이면 이진트리 분할, 1이면 쿼드트리 분할을 나타낼 수 있다. 상기 이진트리 분할 유형 플래그의 경우, 0이면 수평 방향 분할, 1이면 수직 방향 분할을 나타낼 수 있으며, 반대로 0이면 수직 방향 분할, 1이면 수평 방향 분할을 나타낼 수 있다.If the division flag is 1, the division flag may be 0, indicating that the partition is not divided. In the case of the quad / binary tree flag, 0 may indicate quadtree division, and 1, binary tree division. This may indicate quadtree splitting. In the case of the binary tree partition type flag, 0 indicates horizontal division, 1 indicates vertical division, and 0 indicates vertical division, and 1 indicates horizontal division.
예를 들어, 도 11에 대한 분할 정보는 다음 표 3과 같이 quadtree_flag, binarytree_flag, Btype_flag 중 적어도 하나를 시그널링 하여 유도할 수 있다.For example, the split information of FIG. 11 may be derived by signaling at least one of quadtree_flag, binarytree_flag, and Btype_flag as shown in Table 3 below.
| quadtree_flagquadtree_flag | 1One | 00 | 1One | 00 | 00 | 00 | 00 | 00 | 00 | |||||||||||||||||||
| binarytree_flagbinarytree_flag | 1One | 00 | 00 | 1One | 00 | 00 | 00 | 00 | 00 | 1One | 1One | 00 | 00 | 00 | 00 | |||||||||||||
| Btype_flagBtype_flag | 1One | 00 | 00 | 1One | ||||||||||||||||||||||||
예를 들어, 도 11에 대한 분할 정보는 다음 표 4와같이 split_flag, QB_flag, Btype_flag 중 적어도 하나를 시그널링 하여 유도할 수 있다.For example, the split information of FIG. 11 may be derived by signaling at least one of split_flag, QB_flag, and Btype_flag as shown in Table 4 below.
| split_flagsplit_flag | 1One | 1One | 00 | 00 | 1One | 1One | 00 | 00 | 00 | 00 | 00 | 1One | 1One | 00 | 00 | 00 | 00 | |||||||||
|
QB_flag |
00 | 1One | 00 | 1One | 1One | |||||||||||||||||||||
| Btype_flagBtype_flag | 1One | 00 | 00 | 1One | ||||||||||||||||||||||
상기 분할 방법은 블록의 크기/형태에 따라 쿼드트리로만 분할이 가능할 수 있으며 또는 이진트리로만 분할이 가능할 수 있다. 이러한 경우, 상기 split_flag는 쿼드트리 또는 이진트리 분할 여부를 나타내는 플래그를 의미할 수 있다. 상기 블록의 크기/형태는 블록의 깊이 정보에 따라 유도될 수 있으며, 깊이 정보는 시그널링 될 수 있다. The splitting method may be split only into quadtrees or split only into binary trees depending on the size / shape of the block. In this case, the split_flag may mean a flag indicating whether quadtree or binary tree is split. The size / shape of the block may be derived according to the depth information of the block, and the depth information may be signaled.
상기 블록의 크기가 소정의 범위 내에 속하는 경우에는 쿼드트리로만 분할이 가능할 수 있다. 여기서, 소정의 범위는 쿼드트리만으로 분할이 가능한 최대 블록의 크기 또는 최소 블록의 크기 중 적어도 하나로 정의될 수 있다. 상기 쿼드트리 형태의 분할이 허용되는 최대/최소 블록의 크기를 나타내는 정보는 비트스트림을 통해 시그널링될 수 있고, 해당 정보는 시퀀스, 픽처 파라미터, 또는 슬라이스(세그먼트) 중 적어도 하나의 단위로 시그널링될 수 있다. 또는, 상기 최대/최소 블록의 크기는 부호화기/복호화기에 기-설정된 고정된 크기일 수도 있다. 예를 들어, 상기 블록의 크기가 256x256 ~ 64x64 에 해당하는 경우에는 쿼드트리로만 분할이 가능할 수 있다. 이러한 경우에 상기 split_flag는 쿼드트리 분할 여부를 나타내는 플래그 일 수 있다.When the size of the block falls within a predetermined range, the block may be divided into quadtrees only. Here, the predetermined range may be defined as at least one of the maximum block size or the minimum block size that can be divided only by the quadtree. Information indicating the size of the maximum / minimum block for which the quadtree type division is allowed may be signaled through a bitstream, and the corresponding information may be signaled in units of at least one of a sequence, a picture parameter, or a slice (segment). have. Alternatively, the size of the maximum / minimum block may be a fixed size preset in the encoder / decoder. For example, when the size of the block corresponds to 256x256 to 64x64, the block may be divided into quadtrees only. In this case, the split_flag may be a flag indicating whether the quadtree is split.
상기 블록의 크기가 소정의 범위 내에 속하는 경우에는 이진트리로만 분할이 가능할 수 있다. 여기서, 소정의 범위는 이진트리만으로 분할이 가능한 최대 블록의 크기 또는 최소 블록의 크기 중 적어도 하나로 정의될 수 있다. 상기 이진트리 형태의 분할이 허용되는 최대/최소 블록의 크기를 나타내는 정보는 비트스트림을 통해 시그널링될 수 있고, 해당 정보는 시퀀스, 픽처 파라미터, 또는 슬라이스(세그먼트) 중 적어도 하나의 단위로 시그널링될 수 있다. 또는, 상기 최대/최소 블록의 크기는 부호화기/복호화기에 기-설정된 고정된 크기일 수도 있다. 예를 들어, 상기 블록의 크기가 16x16 ~ 8x8 에 해당하는 경우에는 이진트리로만 분할이 가능할 수 있다. 이러한 경우에 상기 split_flag는 이진트리 분할 여부를 나타내는 플래그 일 수 있다.When the size of the block falls within a predetermined range, it may be possible to divide only into a binary tree. Here, the predetermined range may be defined as at least one of the maximum block size or the minimum block size that can be divided only by the binary tree. The information indicating the size of the maximum / minimum block that allows the division of the binary tree type may be signaled through a bitstream, and the corresponding information may be signaled in units of at least one of a sequence, a picture parameter, or a slice (segment). have. Alternatively, the size of the maximum / minimum block may be a fixed size preset in the encoder / decoder. For example, when the size of the block corresponds to 16x16 to 8x8, it may be possible to divide only into a binary tree. In this case, the split_flag may be a flag indicating whether a binary tree is split.
상기 하나의 블록이 이진트리로 분할된 이후, 상기 분할된 블록이 더 분할될 경우에는 이진트리로만 분할될 수 있다.After the one block is partitioned into a binary tree, when the partitioned block is further partitioned, it may be partitioned only into a binary tree.
상기 분할된 블록의 가로 또는 세로의 크기가 더 이상 분할될 수 없는 크기인 경우에는 상기 하나 이상의 지시자를 시그널링 하지 않을 수 있다.When the horizontal or vertical size of the divided block is a size that can no longer be divided, the one or more indicators may not be signaled.
상기 쿼드트리 기반 하의 이진트리 분할 외에 이진트리 분할 후, 쿼드트리 기반 분할이 가능할 수 있다.In addition to the binary tree splitting under the quadtree, after the binary tree splitting, the quadtree based splitting may be possible.
도 12는 본 발명의 일 실시예에 따라, 현재 블록에 대해 화면 내 예측을 수행하는 방법을 설명하기 위한 도면이다.12 is a diagram for describing a method of performing intra prediction on a current block according to an embodiment of the present invention.
도 12에 도시된 바와 같이, 화면 내 예측은 화면 내 예측 모드 유도 단계(S1210), 참조 샘플 구성 단계(S1220) 및/또는 화면 내 예측 수행 단계(S1230)를 포함할 수 있다.As illustrated in FIG. 12, the intra prediction may include an intra prediction mode derivation step S1210, a reference sample configuration step S1220, and / or an intra prediction prediction step S1230.
화면 내 예측 모드 유도 단계(S1210)에서, 주변 블록의 화면 내 예측 모드를 이용하거나, 현재 블록의 화면 내 예측 모드를 비트스트림으로부터 복호화(예컨대, 엔트로피 복호화)하거나, 색 성분의 화면 내 예측 모드를 이용하거나, 및/또는 변환 모델을 이용한 화면 내 예측 모드를 이용하여 현재 블록의 화면 내 예측 모드를 유도할 수 있다. 또는, 화면 내 예측 모드 유도 단계(S1210)에서, 주변 블록의 화면 내 예측 모드, 주변 블록의 하나 이상의 화면 내 예측 모드의 조합 및/또는 MPM 을 이용하여 유도된 화면 내 예측 모드를 이용하여 현재 블록의 화면 내 예측 모드를 유도할 수 있다.In the in-picture prediction mode derivation step (S1210), the intra prediction mode of the neighboring block is used, the intra prediction mode of the current block is decoded (eg, entropy decoding) from the bitstream, or the intra prediction mode of the color component is determined. Or an intra prediction mode using a transform model may be used to derive an intra prediction mode of the current block. Alternatively, in the in-picture prediction mode derivation step (S1210), a combination of the intra prediction mode of the neighboring block, the combination of one or more intra prediction modes of the neighboring block, and / or the current block using the intra prediction mode derived using the MPM. In-screen prediction mode can be derived.
참조 샘플 구성 단계(S1220)는 참조 샘플 선택 단계 및/또는 참조 샘플 필터링 단계를 수행하여 참조 샘플을 구성할 수 있다.The reference sample configuring step S1220 may configure the reference sample by performing the reference sample selection step and / or the reference sample filtering step.
화면 내 예측 수행 단계(S1230)에서, 비방향성 예측, 방향성 예측, 위치 정보 기반 예측, 색 성분간 예측 및/또는 잔차 신호 예측을 이용하여 현재 블록의 화면 내 예측을 수행할 수 있다. 화면 내 예측 수행 단계(S1230)는 예측 샘플에 대한 필터링을 추가적으로 수행할 수 있다. 방향성 예측을 수행하는 경우, 하나 이상의 샘플 단위에 따라 다른 방향성 예측을 수행할 수 있다. 예를 들어, 하나 이상의 샘플 단위는 단일 샘플, 샘플 그룹, 라인 및/또는 서브 블록일 수 있다.In the intra prediction operation step (S1230), the intra prediction of the current block may be performed using non-directional prediction, directional prediction, location information based prediction, inter-color prediction, and / or residual signal prediction. The intra prediction operation step S1230 may additionally perform filtering on the prediction sample. When directional prediction is performed, different directional predictions may be performed according to one or more sample units. For example, one or more sample units may be a single sample, sample group, line, and / or subblock.
이하에서, 화면 내 예측 모드 유도 단계(S1210)에 대해, 보다 상세히 설명한다.Hereinafter, the intra prediction mode derivation step S1210 will be described in more detail.
전술한 바와 같이, 현재 블록에 대한 화면 내 예측 모드를 유도하기 위해, 하나 이상의 주변 블록의 화면 내 예측 모드를 이용하는 방법, 현재 블록의 화면 내 예측 모드를 비트스트림으로부터 복호화하는 방법, 주변 블록의 부호화 파라미터를 이용하는 방법, 색 성분간 화면 내 예측 모드를 이용하는 방법 중 적어도 하나 이상을 이용할 수 있다. 이때, 주변 블록은 현재 블록의 부호화/복호화 이전에 복원된 하나 이상의 블록일 수 있다. As described above, in order to derive an intra prediction mode for a current block, a method of using an intra prediction mode of one or more neighboring blocks, a method of decoding an intra prediction mode of a current block from a bitstream, and encoding a neighboring block At least one of a method using a parameter and a method using an intra prediction mode between color components may be used. In this case, the neighboring block may be one or more blocks reconstructed before encoding / decoding of the current block.
상기 주변 블록이 픽처, 슬라이스, 타일, CTU(Coding Tree Unit) 등 중 적어도 하나의 소정 유닛의 경계 밖에 위치하거나, PCM 모드 또는 화면 간 예측이 적용된 경우, 해당 주변 블록은 가용하지 않은 것으로 판단될 수 있다. 가용하지 않은 주변 블록에 해당하는 화면 내 예측 모드는 DC 모드, Planar 모드 또는 소정의 화면 내 예측 모드로 대체될 수 있다. When the neighboring block is located outside the boundary of at least one predetermined unit among a picture, a slice, a tile, and a coding tree unit (CTU), or when the PCM mode or the inter prediction is applied, the neighboring block may not be determined to be available. have. The intra prediction mode corresponding to the unavailable neighboring block may be replaced with a DC mode, a planar mode, or a predetermined intra prediction mode.
현재 블록의 크기는 W x H 일 수 있다. W 및 H 는 각각 양의 정수이며, 동일하거나 상이할 수 있다. W 및/또는 H는 예컨대, 2, 4, 8, 16, 32, 64, 128, 256, 512 중 적어도 하나일 수 있다.The size of the current block may be W x H. W and H are each a positive integer and can be the same or different. W and / or H may be, for example, at least one of 2, 4, 8, 16, 32, 64, 128, 256, 512.
도 13은 주변 블록으로부터 현재 블록의 화면 내 예측 모드를 유도하는 방법을 설명하기 위한 도면이다.FIG. 13 is a diagram for describing a method of deriving an intra prediction mode of a current block from a neighboring block.
도 13에 있어서, 주변 블록에 표시된 a~k는 해당 주변 블록의 화면 내 예측 모드 또는 모드 번호를 의미할 수 있다. 현재 블록의 화면 내 예측 모드를 유도하기 위해 이용되는 주변 블록의 위치는 기정의된 고정 위치일 수 있다. 또는 상기 주변 블록의 위치에 관한 정보가 부/복호화를 통해 유도될 수 있다. 본 명세서에서 부/복호화는 엔트로피 부호화 및 복호화를 포함하는 의미로 사용될 수 있다.In FIG. 13, a to k displayed in the neighboring block may mean an intra prediction mode or a mode number of the neighboring block. The position of the neighboring block used to derive the intra prediction mode of the current block may be a predefined fixed position. Alternatively, information about the position of the neighboring block may be derived through encoding / decoding. In this specification, encoding / decoding may be used to mean entropy encoding and decoding.
주변 블록의 화면 내 예측 모드를 이용하는 경우, 주변 블록의 소정의 모드를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 예컨대, 현재 블록의 (0, 0) 샘플의 왼쪽에 인접한 (-1, 0) 샘플이 속한 주변 블록의 화면 내 예측 모드 i를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 현재 블록의 (0, 0) 샘플의 위쪽에 인접한 (0, -1) 샘플이 속한 주변 블록의 화면 내 예측 모드인 f를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 현재 블록의 (0, 0) 샘플의 좌상단에 인접한 (-1, -1) 샘플이 속한 주변 블록의 화면 내 예측 모드인 b를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 현재 블록의 (W-1, 0) 샘플의 위쪽에 인접한 (W-1, -1) 샘플이 속한 주변 블록의 화면 내 예측 모드인 g를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 현재 블록의 (W-1, 0) 샘플의 우상단에 인접한 [W, -1] 샘플이 속한 주변 블록의 화면 내 예측 모드인 k를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 현재 블록의 (0, H-1) 샘플의 왼쪽에 인접한 (1, H-1) 샘플이 속한 주변 블록의 화면 내 예측 모드인 j를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 현재 블록의 (0, H-1) 샘플의 좌하단에 인접한 (-1, H) 샘플이 속한 주변 블록의 화면 내 예측 모드인 l를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 주변 블록 중 소정의 위치에 있는 주변 블록의 화면 내 예측 모드를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 예컨대, 상기 소정의 위치는 비트스트림으로부터 부/복호화되거나 또는 부호화 파라미터에 기초하여 유도될 수 있다. 예컨대, 상기 소정의 위치는 화면 내 예측 모드가 e인 블록일 수 있다.When the intra prediction mode of the neighboring block is used, the predetermined mode of the neighboring block may be derived into the intra prediction mode of the current block. For example, the intra prediction mode i of the neighboring block to which the (-1, 0) sample adjacent to the left of the (0, 0) sample of the current block belongs may be derived to the intra prediction mode of the current block. Alternatively, f, the intra prediction mode of the neighboring block to which the (0, -1) sample adjacent to the (0, 0) sample of the current block belongs, may be derived as the intra prediction mode of the current block. Alternatively, b, the intra prediction mode of the neighboring block to which the (-1, -1) sample adjacent to the upper left of the (0, 0) sample of the current block belongs, may be derived as the intra prediction mode of the current block. Alternatively, g, an intra prediction mode of the neighboring block to which the (W-1, -1) sample adjacent to the (W-1, 0) sample of the current block belongs, may be derived as the intra prediction mode of the current block. . Alternatively, k, the intra prediction mode of the neighboring block to which the [W, -1] sample adjacent to the upper right end of the (W-1, 0) sample of the current block belongs, may be derived as the intra prediction mode of the current block. Alternatively, j, the intra prediction mode of the neighboring block to which the (1, H-1) sample adjacent to the left of the (0, H-1) sample of the current block belongs, may be derived as the intra prediction mode of the current block. Alternatively, l, the intra prediction mode of the neighboring block to which the (-1, H) sample adjacent to the lower left end of the (0, H-1) sample of the current block belongs, may be derived as the intra prediction mode of the current block. Alternatively, the intra prediction mode of the neighboring block at a predetermined position among the neighboring blocks may be derived into the intra prediction mode of the current block. For example, the predetermined position may be encoded / decoded from the bitstream or derived based on encoding parameters. For example, the predetermined position may be a block in which an intra prediction mode is e.
또는 현재 블록의 주변 블록들 중 하나 이상의 주변 블록들이 선택될 수 있다. 상기 선택은 비트스트림을 통해 명시적으로 시그널링되는 정보에 기초하여 수행될 수 있다. 또는 상기 선택은 부호화기와 복호화기에서 미리 설정된 기준에 따라 수행될 수 있다. 선택된 하나 이상의 주변 블록들의 화면 내 예측 모드들로부터 현재 블록의 화면 내 예측 모드가 유도될 수 있다. 예컨대, 현재 블록의 화면 내 예측 모드는 선택된 주변 블록들의 화면 내 예측 모드들의 통계값을 이용하여 유도될 수 있다. 예컨대, 통계값은 최소값, 최대값, 평균값, 가중 평균값, 최빈값 및/또는 중간값(median value)을 포함할 수 있다.Alternatively, one or more neighboring blocks of neighboring blocks of the current block may be selected. The selection may be performed based on information explicitly signaled via the bitstream. Alternatively, the selection may be performed according to preset criteria in the encoder and the decoder. The intra prediction mode of the current block may be derived from the intra prediction modes of the selected one or more neighboring blocks. For example, the intra prediction mode of the current block may be derived using statistical values of the intra prediction modes of the selected neighboring blocks. For example, the statistical value may include a minimum value, a maximum value, an average value, a weighted average value, a mode value, and / or a median value.
예컨대, 현재 블록의 (0, 0) 샘플의 좌측과 상단에 인접한 샘플이 속한 주변 블록들의 화면 내 예측 모드인 i 와 f 중 모드 숫자가 작은 모드 또는 큰 모드를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 예컨대, 선택된 주변 블록들의 화면 내 예측 모드들이 b, f, g, i, j인 경우, 이 중 가장 작은 숫자를 갖는 모드를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 예컨대, 선택된 주변 블록들의 화면 내 예측 모드들이 i, b, f인 경우, 이 중 중간에 해당하는 숫자를 갖는 모드를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 예컨대, 현재 블록의 인접한 주변 블록의 화면 내 예측 모드 중 가장 많이 발생하는 모드를 현재 블록의 화면 내 예측 모드로 유도할 수 있다.For example, i or f, which is an intra prediction mode of the neighboring blocks to which the samples adjacent to the left and top of the (0, 0) sample of the current block belong, is derived from the mode with the smaller or larger mode number as the intra prediction mode of the current block. can do. For example, when the intra prediction modes of the selected neighboring blocks are b, f, g, i, and j, the mode having the smallest number may be derived as the intra prediction mode of the current block. For example, when the intra prediction modes of the selected neighboring blocks are i, b, and f, a mode having a number corresponding to the middle may be derived as the intra prediction mode of the current block. For example, the most frequently occurring mode of the intra prediction modes of the adjacent neighboring blocks of the current block may be derived as the intra prediction mode of the current block.
또는, 하나 이상의 주변 블록의 화면 내 예측 모드를 조합함으로써 현재 블록의 화면 내 예측 모드를 유도할 수 있다. 화면 내 예측 모드는 모드 번호, 모드 값, 모드 각도 중 적어도 하나 이상으로 표현될 수 있다. 예를 들어, 주변 블록의 하나 이상의 화면 내 예측 모드의 평균을 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 두 개의 화면 내 예측 모드의 평균은 두 개의 모드 번호의 중간 번호, 두 개의 모드 값의 중간 값, 두 개의 모드 각도의 중간 각도 중 적어도 하나를 의미할 수 있다.Alternatively, the intra prediction mode of the current block may be derived by combining the intra prediction modes of one or more neighboring blocks. The intra prediction mode may be expressed by at least one of a mode number, a mode value, and a mode angle. For example, an average of one or more intra prediction modes of neighboring blocks may be derived to the intra prediction modes of the current block. The average of the two prediction modes in the screen may mean at least one of an intermediate number of two mode numbers, an intermediate value of two mode values, and an intermediate angle of two mode angles.
예를 들어, 현재 블록의 (0, 0) 샘플의 죄측과 상단에 인접한 샘플이 속한 주변 블록의 화면 내 예측 모드인 i 와 f의 모드 값의 평균에 해당하는 모드를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 예를 들어, 현재 블록의 화면 내 예측 모드 Pred_mode는 아래의 수학식 1의 (1) 내지 (3) 중 적어도 하나의 방법으로 유도될 수 있다.For example, the mode corresponding to the average of the mode values of i and f, the intra prediction modes of the neighboring blocks to which the adjacent and upper samples of (0, 0) samples of the current block belong, is defined as the intra prediction mode of the current block. Can be induced. For example, the intra prediction mode Pred_mode of the current block may be derived by at least one method of (1) to (3) below.

또는, 주변 블록의 화면 내 예측 모드 i가 비방향성 모드인 경우, 현재 블록의 화면 내 예측 모드를 i로 유도할 수 있다. 또는, 주변 블록의 화면 내 예측 모드 f가 방향성 모드인 경우, 현재 블록의 화면 내 예측 모드를 f로 유도할 수 있다. Alternatively, when the intra prediction mode i of the neighboring block is the non-directional mode, the intra prediction mode of the current block may be derived to i. Alternatively, when the intra prediction mode f of the neighboring block is the directional mode, the intra prediction mode of the current block may be derived to f.
또는, 현재 블록의 화면 내 예측 모드는 주변 블록들의 화면 내 예측 모드들인 b, f, g, i, j 의 모드 값 중 적어도 하나 이상의 평균에 해당하는 모드로 유도할 수 있다. 예를 들어, 현재 블록의 화면 내 예측 모드 Pred_mode는 아래의 수학식 2의 (1) 내지 (4) 중 적어도 하나의 방법으로 유도될 수 있다.Alternatively, the intra prediction mode of the current block may be derived as a mode corresponding to an average of at least one or more of the mode values of b, f, g, i and j which are intra prediction modes of neighboring blocks. For example, the intra prediction mode Pred_mode of the current block may be derived by at least one method of (1) to (4) below.

또는, 인접한 주변 블록의 가용한 화면 내 예측 모드의 평균에 해당하는 모드를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 예를 들어, 현재 블록의 왼쪽 주변 블록이 픽처, 타일, 슬라이스 및/또는 CTU의 경계의 밖에 위치하거나, PCM 모드 또는 화면 간 모드 중 적어도 하나에 해당되어 가용하지 않은 경우, 위쪽 주변 블록들의 화면 내 예측 모드들(예컨대, f와 g)의 통계값에 해당하는 모드를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. Alternatively, a mode corresponding to an average of available intra prediction modes of adjacent neighboring blocks may be derived as the intra prediction mode of the current block. For example, if the left neighboring block of the current block is located outside the boundaries of the picture, tile, slice, and / or CTU, or is not available because it corresponds to at least one of the PCM mode or the inter-screen mode, the upper neighboring blocks are in the screen. A mode corresponding to the statistical values of the prediction modes (eg, f and g) may be derived as an intra prediction mode of the current block.
예컨대, 주변 블록들의 화면 내 예측 모드들의 통계값으로서, 가중 평균 또는 가중합이 이용될 수 있다. 이 때, 가중치는 주변 블록의 화면 내 예측 모드의 방향성에 기초하여 부여될 수 있다. 예를 들어, 상대적으로 큰 가중치가 부여되는 모드들이 미리 정의되거나 시그널링될 수 있다. 예컨대, 상대적으로 큰 가중치가 부여되는 모드들은 수직 방향 모드, 수평 방향 모드, 비방향성 모드 중 적어도 하나 이상일 수 있다. 이들 모드들에 대해서는 동일한 가중치가 부여되거나 상이한 가중치가 부여될 수 있다. 예를 들어, 현재 블록의 화면 내 예측 모드 Pred_mode는 아래의 수학식 3을 이용하여 모드 i와 f의 가중합으로 유도될 수 있다. 아래의 수학식 3에서 모드 f는 상대적으로 큰 가중치가 부여되는 모드(예컨대, 수직 방향 모드)일 수 있다. For example, a weighted average or weighted sum may be used as a statistical value of intra prediction modes of neighboring blocks. In this case, the weight may be given based on the direction of the intra prediction mode of the neighboring block. For example, relatively large weighted modes may be predefined or signaled. For example, the relatively weighted modes may be at least one of a vertical direction mode, a horizontal direction mode, and a non-directional mode. These modes may be given the same weight or different weights. For example, the intra prediction mode Pred_mode of the current block may be derived as a weighted sum of the modes i and f using Equation 3 below. In Equation 3 below, the mode f may be a mode in which a relatively large weight is assigned (eg, a vertical direction mode).
또는, 가중합에 이용될 가중치는 주변 블록의 크기에 기초하여 결정될 수 있다. 예를 들어, 현재 블록의 상단에 인접한 블록의 크기가 좌측에 인접한 블록의 크기보다 큰 경우, 상단에 인접한 블록의 화면 내 예측 모드에 보다 큰 가중치를 부여할 수 있다. 또는, 크기가 작은 주변 블록의 화면 내 예측 모드에 더 큰 가중치를 부여할 수도 있다.Alternatively, the weight to be used for the weighted sum may be determined based on the size of the neighboring block. For example, when the size of the block adjacent to the top of the current block is larger than the size of the block adjacent to the left, a larger weight may be given to the intra prediction mode of the block adjacent to the top. Alternatively, a larger weight may be given to an intra prediction mode of a small neighboring block.
또는, 주변 블록의 하나 이상의 화면 내 예측 모드가 비방향성 모드인 경우, 상기 비방향성 모드를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 상기 비방향성 모드를 제외한 주변 블록의 화면 내 예측 모드를 이용하여 현재 블록의 화면 내 예측 모드를 유도할 수 있다. 주변 블록의 화면 내 예측 모드가 모두 비방향성 모드인 경우, 현재 블록의 화면 내 예측 모드를 DC 모드 또는 Planar 모드 중 적어도 하나로 유도할 수 있다.Alternatively, when the at least one intra prediction mode of the neighboring block is the non-directional mode, the non-directional mode may be derived to the intra prediction mode of the current block. Alternatively, the intra prediction mode of the current block may be derived using the intra prediction mode of the neighboring blocks except for the non-directional mode. When the intra prediction modes of the neighboring blocks are all non-directional modes, the intra prediction modes of the current block may be derived to at least one of the DC mode and the planar mode.
또는, 현재 블록의 화면 내 예측 모드는 주변 블록의 화면 내 예측 모드에 기초한 MPM(Most Probable Mode)을 이용하여 유도될 수 있다. MPM을 이용하는 경우, 현재 블록의 화면 내 예측 모드에 관한 하나 이상의 정보가 부/복호화될 수 있다. Alternatively, the intra prediction mode of the current block may be derived using a Most Probable Mode (MPM) based on the intra prediction mode of the neighboring block. When using the MPM, one or more information about the intra prediction mode of the current block may be encoded / decoded.
MPM을 이용하는 경우, MPM 리스트가 구성될 수 있다. MPM 리스트는 주변 블록의 화면 내 예측 모드에 기초하여 유도된 화면 내 예측 모드를 포함할 수 있다. MPM 리스트는 N개의 후보 모드를 포함할 수 있다. N은 양의 정수이며, 현재 블록의 크기 및/또는 형태에 따라 값이 달라질 수 있다. 또는, N에 관한 정보가 비트스트림을 통해 시그널링될 수 있다.When using the MPM, an MPM list may be constructed. The MPM list may include an intra prediction mode derived based on the intra prediction mode of the neighboring block. The MPM list may include N candidate modes. N is a positive integer and may vary depending on the size and / or shape of the current block. Alternatively, information about N may be signaled through the bitstream.
예를 들어, 상기 하나 이상의 주변 블록의 화면 내 예측 모드를 이용하여 유도한 현재 블록의 화면 내 예측 모드는 상기 MPM 리스트에 포함되는 후보 모드일 수 있다. For example, the intra prediction mode of the current block derived using the intra prediction mode of the one or more neighboring blocks may be a candidate mode included in the MPM list.
도 13에 도시된 예에서, 현재 블록에 인접한 (-1, H-1), (W-1, -1), (W, -1), (-1, H), (-1, -1) 샘플 위치의 주변 블록의 화면 내 예측 모드들을 이용할 수 있으며, 예컨대, j, g, Planar, DC, l, k, b 의 순서로 MPM 리스트가 구성될 수 있다. 또는, i, f, Planar, DC, l, k, b의 순서로 MPM 리스트가 구성될 수 있다. 이때, 중복되는 모드는 MPM 리스트에 한번만 포함될 수 있다. 중복되는 모드가 존재하여 MPM 리스트가 모두 채워지지 않는 경우, 리스트에 포함된 모드에 기초하여 추가적인 후보 모드를 리스트에 포함시킬 수 있다. 예컨대, 리스트에 포함된 모드의 +N 또는 -N(N은 양의 정수, 예컨대, 1)에 해당하는 모드를 리스트에 추가할 수 있다. 또는 수평 모드, 수직 모드, 45도 모드, 135도 모드, 225도 모드 중 리스트에 포함되지 않은 적어도 하나 이상의 모드를 리스트에 추가할 수 있다. 또는 주변 블록의 하나 이상의 화면 내 예측 모드의 조합 및/또는 통계값을 이용하여 MPM 리스트를 구성할 수 있다. In the example shown in FIG. 13, (-1, H-1), (W-1, -1), (W, -1), (-1, H), (-1, -1, adjacent to the current block Intra prediction modes of the neighboring block of the sample position may be used. For example, the MPM list may be configured in the order of j, g, planar, DC, l, k, and b. Alternatively, the MPM list may be configured in the order of i, f, Planar, DC, l, k, and b. In this case, the overlapping mode may be included only once in the MPM list. If there are overlapping modes and the MPM list is not all filled, additional candidate modes may be included in the list based on the modes included in the list. For example, a mode corresponding to + N or -N (N is a positive integer, for example, 1) of the modes included in the list may be added to the list. Alternatively, at least one mode not included in the list among the horizontal mode, the vertical mode, the 45 degree mode, the 135 degree mode, and the 225 degree mode may be added to the list. Alternatively, the MPM list may be constructed using a combination of one or more intra prediction modes and / or statistical values of neighboring blocks.
MPM 리스트는 복수 개 존재할 수 있으며, 각각의 MPM 리스트를 구성하는 방법은 서로 다를 수 있다. 예컨대, 3개의 MPM 리스트(MPM 리스트 1, MPM 리스트 2 및 MPM 리스트 3)가 구성될 수 있다. 이때, 각각의 MPM 리스트에 포함되는 화면 내 예측 모드는 중복되지 않을 수 있다.There may be a plurality of MPM lists, and the method of configuring each MPM list may be different. For example, three MPM lists (MPM list 1, MPM list 2 and MPM list 3) may be constructed. In this case, the intra prediction modes included in each MPM list may not overlap.
상기 유도된 MPM 리스트에 현재 블록의 화면 내 예측 모드와 동일한 모드가 존재하는지 여부를 나타내는 지시자(예컨대, prev_intra_luma_pred_flag)가 비트스트림에 부호화되어 있거나, 비트스트림으로부터 복호화될 수 있다.An indicator (eg, prev_intra_luma_pred_flag) indicating whether the same mode as the intra prediction mode of the current block exists in the derived MPM list may be encoded in the bitstream or decoded from the bitstream.
상기 지시자가 현재 블록의 화면 내 예측 모드와 동일한 모드가 MPM 리스트에 존재함을 나타내는 경우, MPM 리스트에 포함된 모드 중 어떤 모드인지를 나타내는 인덱스 정보(예컨대, mpm_idx)가 비트스트림에 부호화되거나 비트스트림으로부터 복호화될 수 있다. 복호화된 인덱스 정보에 기초하여 현재 블록의 화면 내 예측 모드가 유도될 수 있다. When the indicator indicates that the same mode as the intra prediction mode of the current block exists in the MPM list, index information (eg, mpm_idx) indicating which mode among the modes included in the MPM list is encoded in the bitstream or the bitstream. Can be decrypted from. An intra prediction mode of the current block may be derived based on the decoded index information.
상기 지시자가 현재 블록의 화면 내 예측 모드와 동일한 모드가 MPM 리스트에 존재하지 않음을 나타내는 경우, 현재 블록의 화면 내 예측 모드에 관한 정보가 비트스트림에 부호화되거나 비트스트림으로부터 복호화될 수 있다. 복호화된 현재 블록의 화면 내 예측 모드에 관한 정보에 기초하여 현재 블록의 화면 내 예측 모드를 유도할 수 있다. 이때, MPM 리스트에 포함되지 않은 화면 내 예측 모드들은 오름 차순 또는 내림 차순 중 적어도 하나로 정렬될 수 있다. 또는 상기 MPM 리스트에 포함되지 않은 화면 내 예측 모드들 중 하나 이상을 선택하여 하나 이상의 그룹을 구성할 수 있다. 예를 들어, 상기 MPM 리스트에 포함된 화면 내 예측 모드의 +N 또는 -N(N은 양의 정수, 예컨대, 1, 2, 3)에 해당하는 모드를 이용하여 하나의 그룹을 구성할 수 있다. 이때, 상기 그룹은 소정의 개수(예컨대, 8, 16)에 해당하는 화면 내 모드로 구성될 수 있으며, 상기 그룹에 포함된 모드는 MPM 리스트에 포함되지 않는 모드일 수 있다.When the indicator indicates that the same mode as the intra prediction mode of the current block does not exist in the MPM list, information about the intra prediction mode of the current block may be encoded in the bitstream or decoded from the bitstream. The intra prediction mode of the current block may be derived based on the information about the intra prediction mode of the decoded current block. In this case, intra prediction modes not included in the MPM list may be arranged in at least one of ascending and descending order. Alternatively, one or more groups may be configured by selecting one or more of intra prediction modes not included in the MPM list. For example, one group may be configured using a mode corresponding to + N or -N (N is a positive integer, for example, 1, 2, or 3) of the intra prediction mode included in the MPM list. . In this case, the group may be configured as an on-screen mode corresponding to a predetermined number (eg, 8 and 16), and the mode included in the group may be a mode not included in the MPM list.
또는, 전술한 바와 같이, 복수 개의 MPM 리스트가 존재할 때, 상기 지시자(예컨대, prev_intra_luma_pred_flag)는 현재 블록의 화면 내 예측 모드와 동일한 모드가 MPM 리스트 1에 존재하는지 여부를 나타낼 수 있다. 상기 지시자가 상기 MPM 리스트 1에 동일 모드가 존재하지 않음을 나타내는 경우, MPM 리스트 2에 동일 모드가 존재하는지 여부를 판단할 수 있다. 상기 MPM 리스트 2에 동일 모드가 존재하는 경우, 해당 모드를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 상기 MPM 리스트 2에도 동일 모드가 존재하지 않는 경우, MPM 리스트 3에 대한 판단이 수행될 수 있다. 이와 같은 방법으로 복수의 MPM 리스트에 대한 판단이 순차적으로 수행될 수 있다. Alternatively, as described above, when there are a plurality of MPM lists, the indicator (eg, prev_intra_luma_pred_flag) may indicate whether the same mode as the intra prediction mode of the current block exists in MPM list 1. When the indicator indicates that the same mode does not exist in the MPM list 1, it may be determined whether the same mode exists in the MPM list 2. When the same mode exists in the MPM list 2, the mode may be derived as an intra prediction mode of the current block. When the same mode does not exist in the MPM list 2, the determination on the MPM list 3 may be performed. In this way, the determination of the plurality of MPM lists may be performed sequentially.
또는 복수의 MPM 리스트 중 하나를 지시하는 별도의 정보가 전송될 수 있다. 이 경우, 상기 별도의 정보에 의해 지시된 MPM 리스트와 상기 지시자(예컨대, prev_intra_luma_pred_flag)를 이용하여, 현내 블록의 화면 내 예측 모드를 유도할 수 있다.Alternatively, separate information indicating one of the plurality of MPM lists may be transmitted. In this case, the intra prediction mode of the block can be derived by using the MPM list indicated by the separate information and the indicator (for example, prev_intra_luma_pred_flag).
또는 상기 유도한 MPM 리스트의 소정의 후보를 상기 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 예를 들어, 현재 블록의 화면 내 예측 모드를 MPM 리스트의 첫번째인 리스트 0에 해당하는 모드로 유도할 수 있다. 또는, 리스트내의 소정의 모드에 해당하는 인덱스를 부/복호화하여 해당 모드를 현재 블록의 화면 내 예측 모드로 유도할 수 있다.Alternatively, a predetermined candidate of the derived MPM list may be derived to an intra prediction mode of the current block. For example, the intra prediction mode of the current block may be derived to a mode corresponding to list 0 which is the first of the MPM list. Alternatively, the index corresponding to the predetermined mode in the list may be encoded / decoded to derive the corresponding mode into the intra prediction mode of the current block.
상기 MPM 리스트를 구성함에 있어, 소정 크기의 블록에 대해 하나의 MPM 리스트를 구성할 수 있다. 상기 소정 크기의 블록이 다시 복수의 서브 블록들로 분할되는 경우, 복수의 서브 블록들의 각각은 상기 구성된 MPM 리스트를 이용할 수 있다. In constructing the MPM list, one MPM list may be configured for a block having a predetermined size. When the predetermined size block is divided into a plurality of sub blocks, each of the plurality of sub blocks may use the configured MPM list.
예를 들어, 현재 블록이 상기 소정 크기의 블록에 해당하는 경우, 현재 블록에 대한 MPM 리스트를 구성할 수 있다. 현재 블록이 하나 이상의 서브 블록으로 분할되는 경우, 서브 블록들의 각각은 상기 구성된 MPM 리스트를 이용하여 서브 블록의 각각에 대한 화면 내 예측 모드를 유도할 수 있다. 예를 들어, 현재 블록이 8x8이고 서브 블록이 4개의 4x4인 경우, 현재 블록에 대한 MPM 리스트를 구성한 후, 각 서브 블록들은 상기 구성된 MPM 리스트를 이용할 수 있다.For example, when the current block corresponds to the block having the predetermined size, an MPM list for the current block may be configured. When the current block is divided into one or more sub blocks, each of the sub blocks may derive an intra prediction mode for each of the sub blocks using the configured MPM list. For example, if the current block is 8x8 and the subblocks are 4x44, after constructing the MPM list for the current block, each subblock may use the constructed MPM list.
상기 MPM 리스트를 구성함에 있어, 소정 크기의 블록을 분할하여 생성된 서브 블록들에 대한 MPM 리스트는 상기 소정 크기의 블록을 기준으로 각각 구성될 수 있다. In constructing the MPM list, MPM lists for sub-blocks generated by dividing blocks of a predetermined size may be configured based on the blocks of the predetermined size, respectively.
예를 들어, 현재 블록이 상기 소정 크기의 블록에 해당하는 경우, 상기 현재 블록의 주변 블록의 화면 내 예측 모드를 이용하여 현재 블록 내의 각 서브 블록에 대한 MPM 리스트를 구성할 수 있다. 예를 들어, 현재 블록이 8x8이고 서브 블록이 4개의 4x4인 경우, 4개의 각 서브 블록에 대한 MPM 리스트는 현재 블록의 주변 블록의 화면 내 예측 모드를 이용하여 각각 구성할 수 있다. 따라서, 4개의 서브 블록에 대한 MPM 리스트는 동시에 구성될 수 있다.For example, when the current block corresponds to the block having the predetermined size, the MPM list for each subblock in the current block may be configured using the intra prediction mode of the neighboring block of the current block. For example, when the current block is 8x8 and the four subblocks are 4x4, the MPM list for each of the four subblocks may be configured using the intra prediction mode of the neighboring blocks of the current block. Therefore, the MPM lists for the four sub blocks can be configured at the same time.
또는 현재 블록의 화면 내 예측 모드는 상기 MPM을 이용하여 유도한 현재 블록의 화면 내 예측 모드와 주변 블록의 화면 내 예측 모드 중 적어도 하나 이상을 이용하여 유도될 수 있다.Alternatively, the intra prediction mode of the current block may be derived using at least one of the intra prediction mode of the current block derived from the MPM and the intra prediction mode of the neighboring block.
예를 들어, 상기 MPM을 이용하여 유도한 현재 블록의 화면 내 예측 모드가 Pred_mpm일때, 주변 블록의 하나 이상의 화면 내 예측 모드를 이용하여 상기 Pred_mpm을 소정의 모드로 변경함으로써 현재 블록의 화면 내 예측 모드를 유도할 수 있다.For example, when the intra prediction mode of the current block derived using the MPM is Pred_mpm, the intra prediction mode of the current block is changed by changing the Pred_mpm to a predetermined mode using one or more intra prediction modes of a neighboring block. Can be derived.
예를 들어, 주변 블록의 화면 내 예측 모드와 크기를 비교하여 Pred_mpm을 N 만큼 증가 또는 감소시킬 수 있다. 이때, N은 +1, +2, +3, 0, -1, -2, -3 등 소정의 정수일 수 있다. 예컨대, Pred_mpm이 주변 블록의 화면 내 예측 모드 및/또는 하나 이상의 주변 블록의 화면 내 예측 모드들의 통계값보다 작은 경우, Pred_mpm을 증가시킬 수 있다. 또는, Pred_mpm이 주변 블록의 화면 내 예측 모드보다 큰 경우, Pred_mpm을 감소시킬 수 있다. 또는, Pred_mpm 및/또는 Pred_mpm과 비교되는 값에 기초하여 유도될 수 있다.For example, Pred_mpm may be increased or decreased by N by comparing the size with the intra prediction mode of the neighboring block. In this case, N may be a predetermined integer such as +1, +2, +3, 0, -1, -2, -3, and the like. For example, if Pred_mpm is smaller than a statistical value of the intra prediction mode of the neighboring block and / or the intra prediction modes of the one or more neighboring blocks, Pred_mpm may be increased. Alternatively, if Pred_mpm is larger than the intra prediction mode of the neighboring block, Pred_mpm may be reduced. Or it may be derived based on the value compared to Pred_mpm and / or Pred_mpm.
도 13에 도시된 예에서, 상기 Pred_mpm이 f의 모드 값보다 작은 경우, Pred_mpm + 1을 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 상기 Pred_mpm이 g의 모드 값보다 작은 경우, Pred_mpm + 1을 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 상기 Pred_mpm이 f의 모드 값보다 작은 경우, Pred_mpm + 2를 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 상기 Pred_mpm이 f의 모드 값보다 큰 경우, Pred_mpm - 1을 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 상기 Pred_mpm이 i의 모드 값보다 작은 경우, Pred_mpm + 1을 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 상기 Pred_mpm이 f 와 i의 평균값보다 작은 경우, Pred_mpm + 1을 현재 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 상기 Pred_mpm이 f 와 i의 평균값보다 작은 경우, 상기 Pred_mpm과 상기 평균 값의 차이의 1/2를 증가할 수 있다. 예를 들어, Pred_mpm + {((f + i + 1) >> 1 - Pred_mpm + 1)>>1} 을 현재 블록의 화면 내 예측 모드로 유도할 수 있다. In the example shown in FIG. 13, when Pred_mpm is smaller than the mode value of f, Pred_mpm + 1 may be derived to the intra prediction mode of the current block. Alternatively, when the Pred_mpm is smaller than the mode value of g, Pred_mpm + 1 may be derived to the intra prediction mode of the current block. Alternatively, when Pred_mpm is smaller than the mode value of f, Pred_mpm + 2 may be derived to the intra prediction mode of the current block. Alternatively, when the Pred_mpm is larger than the mode value of f, Pred_mpm-1 may be derived to the intra prediction mode of the current block. Alternatively, when the Pred_mpm is smaller than the mode value of i, Pred_mpm + 1 may be derived to the intra prediction mode of the current block. Alternatively, when Pred_mpm is smaller than the average of f and i, Pred_mpm + 1 may be derived to the intra prediction mode of the current block. Alternatively, when the Pred_mpm is smaller than the average value of f and i, half of the difference between the Pred_mpm and the average value may be increased. For example, Pred_mpm + {((f + i + 1) >> 1-Pred_mpm + 1) >> 1} can be derived into the intra prediction mode of the current block.
또는, 상기 Pred_mpm과 주변 블록의 모드 중 하나가 비방향성 모드이고 다른 하나가 방향성 모드인 경우, 상기 비방향성 모드를 현재 블록의 화면 내 예측 모드로 유도하거나 상기 방향성 모드를 현재 블록의 화면 내 예측 모드로 유도할 수 있다.Alternatively, when one of the modes of the Pred_mpm and the neighboring block is the non-directional mode and the other is the directional mode, the non-directional mode is induced to the intra prediction mode of the current block or the directional mode is the intra prediction mode of the current block. Can be induced.
MPM(Most Probable Mode) 리스트를 이용하여 현재 블록의 화면 내 예측 모드를 유도하는 경우, 예컨대, 아래의 MPM 리스트 중 적어도 하나 이상이 이용될 수 있다. 또는 현재 블록의 화면 내 예측 모드는 엔트로피 부호화/복호화될 수 있다. In the case of deriving the intra prediction mode of the current block using a Most Probable Mode (MPM) list, for example, at least one or more of the following MPM lists may be used. Alternatively, the intra prediction mode of the current block may be entropy encoded / decoded.
- 현재 블록의 MPM 리스트 MPM list of current block
- 현재 블록에 대한 상위 블록들의 MPM 리스트 중 적어도 하나 이상At least one of the MPM lists of higher blocks for the current block
- 현재 블록에 대한 인접 블록들의 MPM 리스트 중 적어도 하나 이상At least one of the MPM lists of neighboring blocks for the current block
이때, 상기 현재 블록의 MPM 리스트 사용 여부, 현재 블록에 대한 상위 블록들의 MPM 리스트 중 적어도 하나 이상 사용 여부, 현재 블록에 대한 인접 블록들의 MPM 리스트 중 적어도 하나 이상 사용 여부 등 MPM 리스트를 구성하는데 필요한 정보는 VPS(video parameter set), SPS(sequence parameter set), PPS(picture parameter set), APS(adaptation parameter set), 슬라이스(slice) 헤더, 타일(tile) 헤더, CTU 단위, CU 단위, PU 단위, TU 단위 중 적어도 하나를 통하여 엔트로피 부호화/복호화될 수 있다.In this case, information necessary for configuring an MPM list, such as whether the MPM list of the current block is used, whether at least one or more MPM lists of upper blocks for the current block are used, and whether or not at least one or more MPM lists of adjacent blocks for the current block are used. Is a video parameter set (VPS), a sequence parameter set (SPS), a picture parameter set (PPS), an adaptation parameter set (APS), a slice header, a tile header, a CTU unit, a CU unit, a PU unit, Entropy may be encoded / decoded through at least one of the TU units.
상기 상위 블록은 현재 블록의 깊이 값보다 작은 깊이 값을 갖는 블록일 수 있다. 또한, 상위 블록은 상기 작은 깊이 값을 갖는 블록들 중 현재 블록을 포함하는 블록들 중 적어도 하나 이상을 의미할 수 있다. 여기서, 깊이 값은 블록이 분할될 때마다 1씩 증가하는 값을 의미할 수 있다. 예컨대, 분할되지 않은 부호화 트리 유닛(CTU)의 깊이 값은 0일 수 있다.The upper block may be a block having a depth value smaller than the depth value of the current block. In addition, the upper block may mean at least one or more of the blocks including the current block among the blocks having the small depth value. Here, the depth value may mean a value that increases by 1 whenever the block is divided. For example, a depth value of an unsegmented coding tree unit (CTU) may be zero.
또한, 상기 상위 블록은 아래의 실시예 또는 아래의 실시예들 중 적어도 하나 이상의 조합을 의미할 수 있다. 제1 블록이 상위 블록이고 제2 블록이 현재 블록일 때, 상기 제1 블록은 상기 제2 블록을 포함할 수 있다. 이때, 상기 제1 블록은 상기 제2 블록보다 깊이가 얕은 블록을 의미할 수 있다. 이때, 깊이가 얕은 블록은 깊이 값이 작은 블록과 동일한 의미일 수 있다. 또는, 상기 제1 블록은 상기 제2 블록보다 크기가 큰 블록을 의미할 수 있다. 이때, 크기가 큰 블록은 깊이가 얕은 블록일 수 있다.In addition, the upper block may mean a combination of at least one of the following embodiments or the following embodiments. When the first block is an upper block and the second block is a current block, the first block may include the second block. In this case, the first block may mean a block that is shallower than the second block. In this case, a shallow block may have the same meaning as a block having a small depth value. Alternatively, the first block may mean a block larger in size than the second block. In this case, the large block may be a shallow block.
상기 제1 블록의 크기 또는 깊이 중 적어도 하나를 나타내는 정보는 부호화기로부터 시그날링될 수 있다. 상기 정보는 VPS, SPS, 픽쳐, 슬라이스, 타일, 블록 레벨 중 적어도 하나에서 시그날링될 수 있다. Information representing at least one of the size or depth of the first block may be signaled from an encoder. The information may be signaled at at least one of a VPS, an SPS, a picture, a slice, a tile, and a block level.
상기 제1 블록의 크기 또는 깊이 중 적어도 하나는 상기 제2 블록의 크기 또는 깊이 중 적어도 하나에 기초하여 유도될 수 있다. 예를 들어, 상기 제2 블록(현재 블록)의 크기(또는 깊이) 값에 소정의 상수를 더하거나 뺀 값에 기초하여 상기 제1 블록의 크기 또는 깊이 중 적어도 하나를 유도할 수 있다. 또는, 상기 제1 블록의 크기 또는 깊이 중 적어도 하나는 부호화기/복호화기에서 기-약속된 고정된 값을 가질 수도 있다. At least one of the size or depth of the first block may be derived based on at least one of the size or depth of the second block. For example, at least one of the size or depth of the first block may be derived based on a value added or subtracted from a size (or depth) value of the second block (current block). Alternatively, at least one of the size or depth of the first block may have a fixed value pre-committed in the encoder / decoder.
상기 인접 블록은 현재 블록에 공간적 및/또는 시간적으로 인접한 블록들 중 적어도 하나일 수 있다. 상기 인접 블록들은 이미 부호화/복호화된 블록들일 수 있다. 또한, 상기 인접 블록은 현재 블록과 같거나 다른 깊이(또는 크기) 값을 가질 수 있다. 상기 인접 블록은 현재 블록을 기준으로 소정의 위치에 있는 블록을 의미할 수 있다. 여기서, 상기 소정의 위치는 현재 블록을 기준으로 좌상단, 상단, 우상단, 좌측, 및 좌하단 중 적어도 하나 이상일 수 있다. The neighboring block may be at least one of blocks spatially and / or temporally adjacent to the current block. The neighboring blocks may be blocks that are already encoded / decoded. In addition, the adjacent block may have a depth (or size) value equal to or different from that of the current block. The adjacent block may mean a block at a predetermined position with respect to the current block. The predetermined position may be at least one of an upper left end, an upper end, an upper right end, a left side, and a lower left end based on the current block.
또는 상기 소정의 위치는 현재 블록이 속한 픽쳐와 다른 픽쳐 내의 위치일 수 있다. 상기 소정의 위치에 있는 블록은 상기 다른 픽쳐 내에서 현재 블록과 동일 위치의 블록(collocated block) 및/또는 상기 동일 위치 블록에 인접한 블록 중 적어도 하나를 의미할 수 있다. 또는, 상기 소정의 위치에 있는 블록은 현재 블록에 대응하는 상기 다른 픽쳐 내의 특정 영역에서, 현재 블록과 동일한 예측 모드를 가진 블록일 수 있다. Alternatively, the predetermined position may be a position in a picture different from the picture to which the current block belongs. The block in the predetermined position may mean at least one of a block located at the same position as the current block and / or a block adjacent to the same position in the other picture. Alternatively, the block at the predetermined position may be a block having the same prediction mode as the current block in a specific region in the other picture corresponding to the current block.
또한, 상기 인접 블록은 아래의 실시예 또는 아래의 실시예들 중 적어도 하나 이상의 조합을 의미할 수 있다. 제1 블록이 인접 블록이고 제2 블록이 현재 블록일 때, 상기 제1 블록은 상기 제2 블록에 인접한, 부호화/복호화된 블록일 수 있다. 상기 제1 블록은 상기 제2 블록의 깊이와 동일한 깊이를 갖는 블록일 수 있다. 상기 제1 블록은 상기 제2 블록의 크기와 동일한 크기의 블록일 수 있다.In addition, the adjacent block may mean a combination of at least one of the following embodiments or the following embodiments. When the first block is an adjacent block and the second block is a current block, the first block may be an encoded / decoded block adjacent to the second block. The first block may be a block having the same depth as that of the second block. The first block may be a block having the same size as that of the second block.
상기 제1 블록과 상기 제2 블록은 동일한 코딩 블록(CTU, CU 등)에 속할 수도 있고, 상이한 코딩 블록에 속할 수도 있다. 상기 제1 블록의 깊이 및/또는 크기는 상기 제2 블록의 깊이 및/또는 크기와 상이할 수 있다.The first block and the second block may belong to the same coding block (CTU, CU, etc.) or may belong to different coding blocks. The depth and / or size of the first block may be different from the depth and / or size of the second block.
여기서, 상기 상위 블록 혹은 상기 인접 블록의 MPM 리스트는 상기 상위 블록 혹은 상기 인접 블록을 기준으로 구성한 MPM 리스트를 의미할 수 있다. 이때, 상기 상위 블록 혹은 상기 인접 블록에 인접한, 부호화/복호화된 블록의 화면내 예측 모드는 상기 상위 블록 혹은 상기 인접 블록의 MPM 리스트에 추가될 수 있다.Here, the MPM list of the upper block or the neighboring block may mean an MPM list configured based on the upper block or the neighboring block. In this case, the intra prediction mode of the encoded / decoded block adjacent to the upper block or the neighboring block may be added to the MPM list of the upper block or the neighboring block.
도 14는 현재 블록, 상위 블록 및 인접 블록을 설명하기 위한 예시도이다.14 is an exemplary diagram for describing a current block, an upper block, and an adjacent block.
*예를 들어, 도 14에서, 블록 U(굵은 실선 블록)는 블록 F, G, H, I, J의 상위 블록일 수 있다. 이때, 블록 F, G, H, I, J 중 적어도 하나 이상은 현재 블록일 수 있다.For example, in FIG. 14, the block U (thick solid line block) may be an upper block of the blocks F, G, H, I, and J. In this case, at least one of the blocks F, G, H, I, and J may be the current block.
예를 들어, 도 14에서, 블록 V(굵은 점선 블록)는 블록 G, H, I, J의 상위 블록일 수 있다. 이때, 블록 G, H, I, J 중 적어도 하나 이상은 현재 블록일 수 있다.For example, in FIG. 14, the block V (bold dotted block) may be an upper block of the blocks G, H, I, and J. In this case, at least one of the blocks G, H, I, and J may be a current block.
예를 들어, 도 14에서, 블록 W(점 패턴 블록)는 블록 G, H, I의 상위 블록일 수 있다. 이때, 블록 G, H, I 중 적어도 하나 이상은 현재 블록일 수 있다.For example, in FIG. 14, the block W (dot pattern block) may be an upper block of the blocks G, H, and I. In this case, at least one of the blocks G, H, and I may be a current block.
예를 들어, 도 14에서, 블록 X(마름모 패턴 블록)는 블록 H, I의 상위 블록일 수 있다. 이때, 블록 H, I 중 적어도 하나 이상은 현재 블록일 수 있다.For example, in FIG. 14, block X (a diamond pattern block) may be an upper block of blocks H and I. In this case, at least one of the blocks H and I may be a current block.
예를 들어, 도 14에서 현재 블록 D의 인접 블록은 B, C, K 중 적어도 하나일 수 있다.For example, in FIG. 14, an adjacent block of the current block D may be at least one of B, C, and K.
예를 들어, 도 14에서 현재 블록 L의 인접 블록은 C, D, E, H, K 중 적어도 하나일 수 있다.For example, in FIG. 14, an adjacent block of the current block L may be at least one of C, D, E, H, and K.
예를 들어, 도 14에서 현재 블록 P의 인접 블록은 E, H, I, J, L, N, O 중 적어도 하나일 수 있다.For example, in FIG. 14, an adjacent block of the current block P may be at least one of E, H, I, J, L, N, and O.
예를 들어, 도 14에서 현재 블록 S의 인접 블록은 I, J, P, Q, R 중 적어도 하나일 수 있다.For example, the neighboring block of the current block S in FIG. 14 may be at least one of I, J, P, Q, and R.
N개의 MPM 리스트를 이용하여, 현재 블록의 화면내 예측 모드를 유도하거나, 현재 블록의 화면 내 예측 모드를 엔트로피 부호화/복호화할 수 있다. 이때, N은 0 또는 양의 정수를 의미할 수 있다. 즉, 복수 개의 MPM 리스트를 이용하여, 현재 블록의 화면 내 예측 모드를 유도하거나, 현재 블록의 화면 내 예측 모드를 엔트로피 부호화/복호화할 수 있다. 또한, 복수 개의 MPM 리스트는 다중(multiple) MPM 리스트 혹은 다중 리스트를 의미할 수 있다. 이때, 현재 블록에 대한 N개의 MPM 리스트에는 현재 블록의 MPM 리스트, 상위 블록의 MPM 리스트, 인접 블록의 MPM 리스트 중 적어도 하나 이상이 포함될 수 있다.The N MPM lists may be used to derive the intra prediction mode of the current block or entropy encode / decode the intra prediction mode of the current block. In this case, N may mean 0 or a positive integer. That is, the intra prediction mode of the current block may be derived using the plurality of MPM lists, or the entropy encoding / decoding of the intra prediction mode of the current block may be performed. In addition, the plurality of MPM lists may mean multiple MPM lists or multiple lists. In this case, the N MPM lists for the current block may include at least one of the MPM list of the current block, the MPM list of the upper block, and the MPM list of the neighboring block.
또한, N개의 MPM 리스트는 현재 블록의 부호화 파라미터 중 적어도 하나 이상을 이용하여 생성될 수 있다.In addition, the N MPM lists may be generated using at least one of encoding parameters of the current block.
또한, 특정 블록 내 서브 블록 중 적어도 하나가 현재 블록이 될 수도 있고, 이 경우 서브 블록의 상위 블록은 상기 특정 블록이 될 수 있다. 여기서, 서브 블록은 상기 특정 블록에 포함될 수 있다. 또한, 서브 블록은 상기 특정 블록으로부터 분할된 블록일 수 있다. 또한, 상기 특정 블록으로부터 분할된 서브 블록들 중 현재 블록에 해당하지 않는 서브 블록들 중 적어도 하나 이상은 현재 블록의 인접 블록이 될 수 있다. 여기서, 서브 블록은 상위 블록과 반대되는 의미로 하위 블록을 의미할 수 있다.In addition, at least one of the sub blocks in a specific block may be the current block, and in this case, an upper block of the sub block may be the specific block. Here, the sub block may be included in the specific block. In addition, the sub block may be a block divided from the specific block. In addition, at least one or more of the sub blocks that do not correspond to the current block among the sub blocks divided from the specific block may be adjacent blocks of the current block. Here, the sub block may mean a lower block in a meaning opposite to that of the upper block.
예를 들어, 도 14에서 현재 블록을 H라고 할 때, 현재 블록에 대한 복수 개의 MPM 리스트는 후술하는 방법들 중 적어도 하나의 방법으로 구성될 수 있다. 여기서, 복수 개의 MPM 리스트는 현재 블록을 기준으로 구성된 MPM 리스트 및 현재 블록의 상위 블록을 기준으로 구성된 MPM 리스트 중 적어도 하나 이상을 포함할 수 있다. For example, when the current block is referred to as H in FIG. 14, the plurality of MPM lists for the current block may be configured by at least one of the methods described below. Here, the plurality of MPM lists may include at least one of an MPM list configured based on the current block and an MPM list configured based on the upper block of the current block.
예를 들어, 도 14에서, 상위 블록 X를 기준으로 구성한 MPM 리스트를 현재 블록 H에 대해 사용할 수 있다.For example, in FIG. 14, an MPM list configured based on the upper block X may be used for the current block H.
예를 들어, 도 14에서, 상위 블록 W를 기준으로 구성한 MPM 리스트를 현재 블록 H에 대해 사용할 수 있다.For example, in FIG. 14, an MPM list configured based on the upper block W may be used for the current block H.
예를 들어, 도 14에서, 상위 블록 V를 기준으로 구성한 MPM 리스트를 현재 블록 H에 대해 사용할 수 있다.For example, in FIG. 14, an MPM list configured based on the upper block V may be used for the current block H.
예를 들어, 도 14에서, 상위 블록 U를 기준으로 구성한 MPM 리스트를 현재 블록 H에 대해 사용할 수 있다.For example, in FIG. 14, an MPM list configured based on the upper block U may be used for the current block H.
예를 들어, 도 14에서, 상위 블록 X, W, V, U 중 적어도 하나 이상을 기준으로 구성한 MPM 리스트들 중 적어도 하나 이상을 현재 블록 H의 화면 내 예측 모드를 유도하기 위해 사용할 수 있다.For example, in FIG. 14, at least one or more of the MPM lists configured based on at least one or more of upper blocks X, W, V, and U may be used to derive an intra prediction mode of the current block H.
예를 들어, 도 14에서, 현재 블록이 H 일때, 현재 블록은 복수 개의 MPM 리스트를 후술하는 방법들 중 적어도 하나의 방법으로 구성할 수 있다. 여기서, 복수 개의 MPM 리스트는 현재 블록을 기준으로 구성된 MPM 리스트 및 현재 블록의 인접 블록을 기준으로 구성된 MPM 리스트 중 적어도 하나 이상을 포함할 수 있다.For example, in FIG. 14, when the current block is H, the current block may be configured by at least one of the following methods for describing a plurality of MPM lists. Here, the plurality of MPM lists may include at least one of an MPM list configured based on the current block and an MPM list configured based on the adjacent block of the current block.
예를 들어, 도 14에서, 인접 블록 E를 기준으로 구성한 MPM 리스트를 현재 블록 H에 대해 사용할 수 있다.For example, in FIG. 14, an MPM list configured based on the neighboring block E may be used for the current block H.
예를 들어, 도 14에서, 인접 블록 G를 기준으로 구성한 MPM 리스트를 현재 블록 H에 대해 사용할 수 있다.For example, in FIG. 14, an MPM list constructed based on the neighboring block G may be used for the current block H.
예를 들어, 도 14에서, 인접 블록 E, G 중 적어도 하나 이상을 기준으로 구성한 MPM 리스트들 중 적어도 하나 이상을 현재 블록 H에 대해 사용할 수 있다.For example, in FIG. 14, at least one or more of the MPM lists configured based on at least one or more of the adjacent blocks E and G may be used for the current block H.
현재 블록의 화면 내 예측 모드는 상기 구성된 MPM 리스트를 이용하여 유도되거나, 엔트로피 부호화/복호화될 수 있다.The intra prediction mode of the current block may be derived using the constructed MPM list or may be entropy encoded / decoded.
상기 상위 블록 혹은 상기 인접 블록의 MPM 리스트를 현재 블록 H에 대해 사용한다는 것은 현재 블록의 화면 내 예측 모드의 유도 또는 현재 블록의 화면 내 예측 모드의 부호화/복호화에 상기 상위 블록 혹은 상기 인접 블록의 MPM 리스트가 사용된다는 것을 의미할 수 있다.Using the MPM list of the higher block or the neighboring block for the current block H means that the MPM of the higher block or the neighboring block is used for deriving the intra prediction mode of the current block or encoding / decoding the intra prediction mode of the current block. This may mean that lists are used.
현재 블록에 대한 복수 개의 MPM 리스트는 N개의 상위 블록들에 대한 MPM 리스트들을 포함할 수 있다. 이때, N은 0 또는 양의 정수일 수 있다.The plurality of MPM lists for the current block may include MPM lists for N upper blocks. In this case, N may be 0 or a positive integer.
이때, 상기 포함되는 상위 블록의 개수 N, 깊이 값, 깊이 값의 범위 및/또는 현재 블록과 상위 블록의 깊이 값의 차분 등의 정보가 상위 블록의 MPM 리스트를 구성하는데 필요할 수 있다. 상기 상위 블록의 MPM 리스트를 구성하는데 필요한 정보는 VPS(video parameter set), SPS(sequence parameter set), PPS(picture parameter set), APS(adaptation parameter set), 슬라이스(slice) 헤더, 타일(tile) 헤더, CTU 단위, CU 단위, PU 단위, TU 단위 중 적어도 하나에서 엔트로피 부호화/복호화될 수 있다.In this case, information such as the number N of the upper blocks included, the depth value, the range of the depth value, and / or the difference between the depth value of the current block and the upper block may be necessary to form the MPM list of the upper block. Information necessary for constructing the MPM list of the upper block includes: video parameter set (VPS), sequence parameter set (SPS), picture parameter set (PPS), adaptation parameter set (APS), slice header, tile Entropy encoding / decoding may be performed in at least one of a header, a CTU unit, a CU unit, a PU unit, and a TU unit.
예를 들어, 현재 블록의 깊이 값이 D일 때, 후술하는 방법들 중 적어도 하나 이상을 이용하여 상위 블록의 MPM 리스트를 구성할 수 있다. 전술한 바와 같이, 구성된 상기 상위 블록의 MPM 리스트는 현재 블록의 화면 내 예측 모드의 유도 또는 현재 블록의 화면 내 예측 모드의 엔트로피 부호화/복호화에 이용될 수 있다. 여기서, D는 0 또는 양의 정수일 수 있다.For example, when the depth value of the current block is D, the MPM list of the upper block may be configured using at least one or more of the methods described below. As described above, the configured MPM list of the upper block may be used for deriving the intra prediction mode of the current block or entropy encoding / decoding of the intra prediction mode of the current block. Here, D may be 0 or a positive integer.
예를 들어, D-1의 깊이 값을 갖는 상위 블록의 MPM 리스트를 현재 블록에 대해 사용할 수 있다.For example, the MPM list of the upper block having a depth value of D-1 may be used for the current block.
예를 들어, D-2의 깊이 값을 갖는 상위 블록의 MPM 리스트를 현재 블록에 대해 사용할 수 있다.For example, the MPM list of the upper block having a depth value of D-2 may be used for the current block.
예를 들어, D-K의 깊이 값을 갖는 상위 블록의 MPM 리스트를 현재 블록에 대해 사용할 수 있다. 여기서, K는 D보다 작거나 같은 양의 정수일 수 있다.For example, an MPM list of higher blocks having a depth value of D-K may be used for the current block. Here, K may be a positive integer less than or equal to D.
예를 들어, D-1부터 D-2까지의 깊이 값을 갖는 상위 블록들의 MPM 리스트를 현재 블록에 대해 사용할 수 있다. For example, an MPM list of upper blocks having depth values from D-1 to D-2 may be used for the current block.
예를 들어, D-1부터 D-3까지의 깊이 값을 갖는 상위 블록들의 MPM 리스트를 현재 블록에 대해 사용할 수 있다. For example, an MPM list of upper blocks having depth values from D-1 to D-3 may be used for the current block.
예를 들어, D-1부터 D-K까지의 깊이 값을 갖는 상위 블록들의 MPM 리스트를 현재 블록에 대해 사용할 수 있다. 여기서, K는 D보다 작거나 같은 양의 정수일 수 있다.For example, an MPM list of upper blocks having depth values from D-1 to D-K may be used for the current block. Here, K may be a positive integer less than or equal to D.
예를 들어, D-K부터 D-l까지의 깊이 값을 갖는 상위 블록들의 MPM 리스트를 현재 블록에 대해 사용할 수 있다. 여기서, K와 l은 D보다 작거나 같은 양의 정수일 수 있다. 또한, K는 l보다 작을 수 있다.For example, an MPM list of higher blocks having a depth value from D-K to D-l may be used for the current block. Here, K and l may be a positive integer less than or equal to D. K may also be less than l.
예를 들어, 1개의 상위 블록을 이용하는 경우, D-1 또는 0의 깊이 값을 갖는 상위 블록의 MPM 리스트를 현재 블록에 대해 사용할 수 있다.For example, when using one upper block, an MPM list of upper blocks having a depth value of D-1 or 0 may be used for the current block.
예를 들어, 2개의 상위 블록들을 이용하는 경우, 0, 1, D-1 또는 D-2의 깊이 갚은 갖는 상위 블록들 중 적어도 2개의 상위 블록들의 MPM 리스트를 현재 블록에 대해 사용할 수 있다.For example, when using two upper blocks, an MPM list of at least two upper blocks among upper blocks having a depth-returned value of 0, 1, D-1 or D-2 may be used for the current block.
예를 들어, K개의 상위 블록들을 이용하는 경우, D-1부터 D-K의 깊이 값 및 0부터 K-1의 깊이 값을 갖는 상위 블록들 중 적어도 K개의 상위 블록들의 MPM 리스트를 현재 블록에 대해 사용할 수 있다. 여기서, K는 D보다 작거나 같은 양의 정수일 수 있다.For example, when using K upper blocks, an MPM list of at least K upper blocks among upper blocks having a depth value of D-1 to DK and a depth value of 0 to K-1 may be used for the current block. have. Here, K may be a positive integer less than or equal to D.
예를 들어, K개의 상위 블록들을 이용하는 경우, 현재 블록을 기준으로 K개의 상위 블록들의 MPM 리스트를 사용할 수 있다. 여기서, K는 D보다 작거나 같은 양의 정수일 수 있다.For example, when using K upper blocks, an MPM list of K upper blocks may be used based on the current block. Here, K may be a positive integer less than or equal to D.
현재 블록에 대한 복수 개의 MPM 리스트에 상위 블록들의 MPM 리스트가 포함될 때, 이용되는 상위 블록의 개수 및/또는 깊이 값은 현재 블록의 크기 및/또는 깊이 정보를 이용하여 유도될 수 있다.When the MPM list of the upper blocks is included in the plurality of MPM lists for the current block, the number and / or depth value of the upper block used may be derived using the size and / or depth information of the current block.
예를 들어, 현재 블록이 깊이 값이 D인 WxH 블록일 때, 현재 블록의 크기는 WxH개의 화소 수로 나타낼 수 있다. 현재 블록의 화소 수가 소정의 임계값(Threshold)보다 크거나 같은 경우, D-1부터 D-K까지의 깊이 값을 갖는 상위 블록들 중 적어도 하나 이상의 상위 블록들의 MPM 리스트를 현재 블록에 대해 이용할 수 있다. 여기서, K는 D보다 작은 양의 정수일 수 있다.For example, when the current block is a WxH block having a depth value of D, the size of the current block may be represented by the number of WxH pixels. When the number of pixels of the current block is greater than or equal to a predetermined threshold, an MPM list of at least one or more upper blocks among upper blocks having a depth value from D-1 to D-K may be used for the current block. Here, K may be a positive integer less than D.
또한, 예를 들어, 현재 블록의 화소 수가 소정의 임계값보다 작은 경우, D-1부터 D-L까지의 깊이 값들을 갖는 상위 블록들 중 적어도 하나 이상의 상위 블록들의 MPM 리스트를 현재 블록에 대해 이용할 수 있다. 여기서, L은 K보다 큰 양의 정수일 수 있다.Also, for example, when the number of pixels of the current block is smaller than a predetermined threshold, an MPM list of at least one or more higher blocks among upper blocks having depth values from D-1 to DL may be used for the current block. . Here, L may be a positive integer greater than K.
예를 들어, 현재 블록의 깊이 값이 D이고, D가 소정의 깊이 값 T보다 작거나 같은 경우, D-1부터 D-K까지의 깊이 값을 갖는 상위 블록들 중 적어도 하나 이상의 상위 블록들의 MPM 리스트를 현재 블록에 대해 이용할 수 있다. 여기서, K는 D보다 작은 양의 정수일 수 있다.For example, when the depth value of the current block is D, and D is less than or equal to the predetermined depth value T, the MPM list of at least one or more higher blocks among upper blocks having a depth value from D-1 to DK is obtained. Available for the current block. Here, K may be a positive integer less than D.
또한, 예를 들어, 현재 블록의 깊이 값 D가 T보다 큰 경우, D-1부터 D-L까지의 깊이 값들을 갖는 상위 블록들 중 적어도 하나 이상의 상위 블록들의 MPM 리스트를 현재 블록에 대해 이용할 수 있다. 여기서, L은 K보다 큰 양의 정수일 수 있다.Also, for example, when the depth value D of the current block is greater than T, an MPM list of at least one or more upper blocks among upper blocks having depth values from D-1 to D-L may be used for the current block. Here, L may be a positive integer greater than K.
현재 블록에 대한 복수 개의 MPM 리스트는 N개의 인접 블록들에 대한 MPM 리스트를 포함할 수 있다. 상기 N개의 인접 블록들은 소정 위치의 인접 블록들을 포함할 수 있다. 상기 N은 0 또는 양의 정수일 수 있다.The plurality of MPM lists for the current block may include MPM lists for N adjacent blocks. The N adjacent blocks may include adjacent blocks of a predetermined position. N may be zero or a positive integer.
상기 포함되는 인접 블록의 개수 N, 깊이 값, 크기 및/또는 위치 등의 정보가 인접 블록의 MPM 리스트를 구성하는데 필요할 수 있다. 상기 인접 블록의 MPM 리스트를 구성하는데 필요한 정보는 VPS(video parameter set), SPS(sequence parameter set), PPS(picture parameter set), APS(adaptation parameter set), 슬라이스(slice) 헤더, 타일(tile) 헤더, CTU 단위, CU 단위, PU 단위, TU 단위 중 적어도 하나에서 엔트로피 부호화/복호화될 수 있다. 인접 블록의 개수 및/또는 위치는 현재 블록의 크기, 형태 및/또는 위치에 따라 가변적으로 결정될 수 있다. 인접 블록의 MPM 리스트는 인접 블록의 깊이 값이 기-설정된 값이거나, 소정의 범위 내에 포함되는 경우에 구성될 수도 있다. 이때 상기 소정의 범위는 최소값 또는 최대값 중 적어도 하나로 정의될 수 있다. 최소값 또는 최대값 중 적어도 하나에 관한 정보는 전술한 소정의 단위에서 엔트로피 부호화/복호화될 수 있다.Information such as the number N, depth value, size, and / or location of the neighboring blocks included in the neighboring block may be necessary to construct the MPM list of the neighboring block. Information necessary for constructing the MPM list of the adjacent block includes: video parameter set (VPS), sequence parameter set (SPS), picture parameter set (PPS), adaptation parameter set (APS), slice header, tile Entropy encoding / decoding may be performed in at least one of a header, a CTU unit, a CU unit, a PU unit, and a TU unit. The number and / or location of adjacent blocks may be variably determined according to the size, shape and / or location of the current block. The MPM list of the neighboring blocks may be constructed when the depth value of the neighboring block is a preset value or falls within a predetermined range. In this case, the predetermined range may be defined as at least one of a minimum value and a maximum value. Information regarding at least one of the minimum value and the maximum value may be entropy encoded / decoded in the above-described predetermined unit.
예를 들어, 도 14에서, 현재 블록이 P이고 깊이 값이 D일 때, 현재 블록에 대한 복수 개의 MPM 리스트는 후술하는 방법들 중 적어도 하나의 방법으로 구성될 수 있다. 여기서, 복수 개의 MPM 리스트는 현재 블록을 기준으로 구성된 MPM 리스트 및 현재 블록의 인접 블록을 기준으로 구성된 MPM 리스트 중 적어도 하나 이상을 포함할 수 있다.For example, in FIG. 14, when the current block is P and the depth value is D, the plurality of MPM lists for the current block may be configured by at least one of the methods described below. Here, the plurality of MPM lists may include at least one of an MPM list configured based on the current block and an MPM list configured based on the adjacent block of the current block.
예를 들어, 현재 블록의 좌측 인접 블록 L 또는 N를 기준으로 구성한 MPM 리스트를 현재 블록 P에 대해 사용할 수 있다.For example, an MPM list configured based on the left neighboring block L or N of the current block may be used for the current block P.
예를 들어, 현재 블록의 좌상단 인접 블록 E를 기준으로 구성한 MPM 리스트를 현재 블록 P에 대해 사용할 수 있다.For example, an MPM list configured based on the upper left neighboring block E of the current block may be used for the current block P. FIG.
예를 들어, 현재 블록의 좌하단 인접 블록 O를 기준으로 구성한 MPM 리스트를 현재 블록 P에 대해 사용할 수 있다.For example, the MPM list configured based on the lower left adjacent block O of the current block may be used for the current block P.
예를 들어, 현재 블록의 상단 인접 블록 H 또는 I를 기준으로 구성한 MPM 리스트를 현재 블록 P에 대해 사용할 수 있다.For example, an MPM list configured based on the upper neighboring block H or I of the current block may be used for the current block P.
예를 들어, 현재 블록의 우상단 인접 블록 J 를 기준으로 구성한 MPM 리스트를 현재 블록 P에 대해 사용할 수 있다.For example, an MPM list configured based on the upper right neighboring block J of the current block may be used for the current block P.
예를 들어, 현재 블록의 좌상단, 상단, 우상단, 좌측, 좌하단 인접 블록들 중 적어도 2개의 MPM 리스트를 현재 블록 P에 대해 사용할 수 있다.For example, at least two MPM lists of the upper left, upper, upper right, left, and lower left adjacent blocks of the current block may be used for the current block P.
예를 들어, 현재 블록의 좌상단, 상단, 우상단, 좌측, 좌하단 인접 블록들 중 적어도 3개의 MPM 리스트를 현재 블록 P에 대해 사용할 수 있다.For example, at least three MPM lists among the upper left, upper, upper right, left, and lower left adjacent blocks of the current block may be used for the current block P.
예를 들어, 현재 블록의 좌상단, 상단, 우상단, 좌측, 좌하단 인접 블록들 중 적어도 4개의 MPM 리스트를 현재 블록 P에 대해 사용할 수 있다.For example, at least four MPM lists of the upper left, upper, upper right, left, and lower left adjacent blocks of the current block may be used for the current block P.
예를 들어, 현재 블록의 좌상단, 상단, 우상단, 좌측, 좌하단 인접 블록들 중 적어도 5개의 MPM 리스트를 현재 블록 P에 대해 사용할 수 있다.For example, at least five MPM lists among the upper left, upper, upper right, left, and lower left adjacent blocks of the current block may be used for the current block P.
또한, 상기 현재 블록, 상기 상위 블록, 상기 인접 블록 중 적어도 하나를 기준으로 유도된 화면내 예측 모드는 현재 블록에 대한 하나의 MPM 리스트에 포함될 수 있다. 즉, 현재 블록이 복수 개의 MPM 리스트를 이용하지 않고, 하나의 MPM 리스트를 이용하는 경우, 상기 현재 블록, 상기 상위 블록, 상기 인접 블록 중 적어도 하나를 기준으로 유도된 화면 내 예측 모드 중 적어도 하나를 이용하여 MPM 리스트가 구성될 수 있다.In addition, the intra prediction mode derived based on at least one of the current block, the upper block, and the adjacent block may be included in one MPM list for the current block. That is, when the current block does not use a plurality of MPM lists and uses one MPM list, at least one of intra prediction modes derived based on at least one of the current block, the higher block, and the adjacent block is used. MPM list can be constructed.
현재 블록에 대한 N개의 MPM 리스트가 상위 블록들 및 인접 블록들 중 적어도 하나 이상 블록들의 MPM 리스트가 포함할 때, N개의 MPM 리스트를 구성하는 순서를 결정할 수 있다. 이때, N은 0 또는 양의 정수일 수 있다. When the N MPM list for the current block includes the MPM list of at least one or more of the upper blocks and the adjacent blocks, the order of configuring the N MPM lists may be determined. In this case, N may be 0 or a positive integer.
MPM 리스트를 구성하는 상기 순서는 부호화기 및 복호화기에서 미리 정해진 순서일 수 있다. 또는, MPM 리스트를 구성하는 상기 순서는 각 해당 블록의 부호화 파라미터를 기반으로 결정될 수 있다. 또는, MPM 리스트를 구성하는 순서는 현재 블록의 부호화 파라미터를 기반으로 결정될 수 있다. 또는, MPM 리스트를 구성하는 상기 순서에 관한 정보는 엔트로피 부호화/복호화될 수 있다.The order of constructing the MPM list may be a predetermined order in the encoder and the decoder. Alternatively, the order of constructing the MPM list may be determined based on encoding parameters of respective corresponding blocks. Alternatively, the order of constructing the MPM list may be determined based on an encoding parameter of the current block. Alternatively, the information about the order of configuring the MPM list may be entropy encoded / decoded.
예를 들어, 도 14에서, 현재 블록이 H이고 현재 블록의 MPM 리스트를 MPM_LIST_CUR이라고 할 수 있다.For example, in FIG. 14, the current block is H and the MPM list of the current block may be referred to as MPM_LIST_CUR.
또한, 현재 블록의 상위 블록을 기준으로 구성한 X, W, V, U의 MPM 리스트를 각각 MPM_LIST_X, MPM_LIST_W, MPM_LIST_V, MPM_LIST_U라고 할 수 있다.In addition, MPM lists of X, W, V, and U configured based on upper blocks of the current block may be referred to as MPM_LIST_X, MPM_LIST_W, MPM_LIST_V, and MPM_LIST_U, respectively.
또한, 현재 블록의 인접 블록을 기준으로 구성한 L, E, G의 MPM 리스트를 각각 MPM_LIST_L, MPM_LIST_E, MPM_LIST_G라고 할 수 있다.In addition, MPM lists of L, E, and G configured based on adjacent blocks of the current block may be referred to as MPM_LIST_L, MPM_LIST_E, and MPM_LIST_G, respectively.
현재 블록에 대한 N개의 MPM 리스트를 구성하는 순서는 후술하는 방법들 중 적어도 하나 이상의 방법으로 결정될 수 있다. 후술하는 방법에 사용되는 상위 블록 및/또는 인접 블록의 개수는 일 예일 뿐이며, 다른 개수의 블록이 사용될 수도 있다. The order of constructing the N MPM lists for the current block may be determined by at least one or more of the methods described below. The number of upper blocks and / or adjacent blocks used in the method described below is just an example, and other numbers of blocks may be used.
예를 들어, MPM_LIST_CUR -> MPM_LIST_X -> MPM_LIST_W -> MPM_LIST_V -> MPM_LIST_U 순으로 현재 블록 H에 대한 복수 개의 MPM 리스트를 구성할 수 있다. For example, a plurality of MPM lists for the current block H may be configured in the order of MPM_LIST_CUR-> MPM_LIST_X-> MPM_LIST_W-> MPM_LIST_V-> MPM_LIST_U.
예를 들어, MPM_LIST_U -> MPM_LIST_V -> MPM_LIST_W -> MPM_LIST_X -> MPM_LIST_CUR 순으로 현재 블록 H에 대한 복수 개의 MPM 리스트를 구성할 수 있다. For example, a plurality of MPM lists for the current block H may be configured in the order of MPM_LIST_U-> MPM_LIST_V-> MPM_LIST_W-> MPM_LIST_X-> MPM_LIST_CUR.
예를 들어, MPM_LIST_CUR를 첫번째 MPM 리스트로 사용하고, 깊이 값을 기반으로 오름차순 또는 내림차순으로 정렬한 적어도 K개 이상의 상위 블록들의 MPM 리스트를 사용하여, 현재 블록 H에 대한 복수 개의 MPM 리스트를 구성할 수 있다. 여기서, K는 0 또는 양의 정수일 수 있다.For example, a plurality of MPM lists for the current block H can be constructed by using MPM_LIST_CUR as the first MPM list, and using the MPM list of at least K higher blocks sorted in ascending or descending order based on the depth value. have. Here, K may be zero or a positive integer.
예를 들어, MPM_LIST_CUR -> MPM_LIST_L -> MPM_LIST_G -> MPM_LIST_E 순으로 현재 블록 H에 대한 복수 개의 MPM 리스트를 구성할 수 있다.For example, a plurality of MPM lists for the current block H may be configured in the order of MPM_LIST_CUR-> MPM_LIST_L-> MPM_LIST_G-> MPM_LIST_E.
예를 들어, MPM_LIST_L -> MPM_LIST_G -> MPM_LIST_E -> MPM_LIST_CUR 순으로 현재 블록 H에 대한 복수 개의 MPM 리스트를 구성할 수 있다.For example, a plurality of MPM lists for the current block H may be configured in the order of MPM_LIST_L-> MPM_LIST_G-> MPM_LIST_E-> MPM_LIST_CUR.
예를 들어, MPM_LIST_CUR를 첫번째 MPM 리스트로 사용하고, 좌상단, 좌측, 좌하단, 상단, 우상단 중 적어도 하나 이상의 인접 블록들의 MPM 리스트들을 소정의 순서에 따라 사용하여 현재 블록 H에 대한 복수 개의 MPM 리스트를 구성할 수 있다. For example, a plurality of MPM lists for the current block H are used by using MPM_LIST_CUR as the first MPM list, and using MPM lists of at least one adjacent block among at least one of upper left, left, lower left, upper, and upper right in a predetermined order. Can be configured.
예를 들어, MPM_LIST_CUR -> MPM_LIST_X -> MPM_LIST_L 순으로 현재 블록 H에 대한 복수 개의 MPM 리스트를 구성할 수 있다. For example, a plurality of MPM lists for the current block H may be configured in the order of MPM_LIST_CUR-> MPM_LIST_X-> MPM_LIST_L.
예를 들어, MPM_LIST_CUR -> MPM_LIST_L -> MPM_LIST_X 순으로 현재 블록 H에 대한 복수 개의 MPM 리스트를 구성할 수 있다. For example, a plurality of MPM lists for the current block H may be configured in the order of MPM_LIST_CUR-> MPM_LIST_L-> MPM_LIST_X.
예를 들어, MPM_LIST_CUR -> 소정의 순서에 따른 상위 블록 K개의 MPM 리스트 -> 소정의 순서에 따른 인접 블록 L개의 MPM 리스트 순으로 현재 블록 H에 대한 복수 개의 MPM 리스트를 구성할 수 있다. 이때, K와 L은 0 또는 양의 정수일 수 있다.For example, a plurality of MPM lists for the current block H may be configured in the order of MPM_LIST_CUR-> higher block K MPM lists in a predetermined order-> adjacent block L MPM lists in a predetermined order. In this case, K and L may be 0 or a positive integer.
예를 들어, MPM_LIST_CUR -> 소정의 순서에 따른 인접 블록 L개의 MPM 리스트 -> 소정의 순서에 따른 상위 블록 K개의 MPM 리스트 순으로 현재 블록 H에 대한 복수 개의 MPM 리스트를 구성할 수 있다. 이때, K와 L은 0 또는 양의 정수일 수 있다.For example, a plurality of MPM lists for the current block H may be configured in order of MPM_LIST_CUR-> neighboring block L MPM lists in a predetermined order-> higher block K MPM lists in a predetermined order. In this case, K and L may be 0 or a positive integer.
예를 들어, MPM_LIST_CUR -> 소정의 순서에 따른 상위 블록 및 인접 블록 중 적어도 K개의 MPM 리스트 순으로 현재 블록 H에 대한 복수 개의 MPM 리스트를 구성할 수 있다. 이때, K는 양의 정수일 수 있다.For example, a plurality of MPM lists for the current block H may be configured in order of at least K MPM lists among upper blocks and adjacent blocks according to MPM_LIST_CUR-> predetermined order. In this case, K may be a positive integer.
예를 들어, 소정의 순서에 따른 MPM_LIST_CUR와 상위 블록 및 인접 블록 중 적어도 K개의 MPM 리스트로 현재 블록 H에 대한 복수 개의 MPM 리스트를 구성할 수 있다. 이때, K는 양의 정수일 수 있다.For example, a plurality of MPM lists for the current block H may be configured with MPM_LIST_CUR and at least K MPM lists among upper blocks and adjacent blocks in a predetermined order. In this case, K may be a positive integer.
이때, 상기 순서가 늦은 MPM 리스트는 상기 순서가 빠른 MPM 리스트에 포함된 화면 내 예측 모드를 포함하지 않을 수 있다.In this case, the late order MPM list may not include the intra prediction mode included in the fast order MPM list.
*또한, 상기 순서가 빠른 MPM 리스트에 대한 지시자(indicator)의 가변 길이 부호(variable length code)는 상기 순서가 늦은 MPM 리스트에 대한 지시자의 가변 길이 부호보다 더 짧을 수 있다.Also, a variable length code of an indicator for the faster order MPM list may be shorter than a variable length code of the indicator for the late order MPM list.
*또한, 상기 순서가 빠른 MPM 리스트는 상기 순서가 늦은 MPM 리스트보다 적은 수의 후보를 포함할 수 있다.Also, the faster MPM list may include fewer candidates than the late MPM list.
또한, 구성되는 MPM 리스트의 순서에 따라 MPM 리스트에 대한 지시자가 할당될 수 있다.In addition, an indicator for the MPM list may be allocated according to the order of the configured MPM list.
상기 MPM 리스트를 구성하는 순서들 중 적어도 하나의 방법에 따라, 현재 블록에 대한 N개의 MPM 리스트는 상위 블록들 및 인접 블록들 적어도 하나 이상의 MPM 리스트를 포함할 수 있다. 이 때, 복수 개의 MPM 리스트들은 서로 중복되는 화면 내 예측 모드를 포함하지 않도록 구성될 수 있다. 이때, N은 0 또는 양의 정수일 수 있다. According to at least one method of constructing the MPM list, the N MPM lists for the current block may include at least one MPM list of upper blocks and adjacent blocks. In this case, the plurality of MPM lists may be configured not to include intra prediction modes overlapping each other. In this case, N may be 0 or a positive integer.
현재 블록에 대해 사용되는 N개의 MPM 리스트는 MPM_LIST_1, MPM_LIST_2, ... MPM_LIST_N 이라고 표현될 수 있다. 상기 MPM_LIST_CUR, MPM_LIST_X, MPM_LIST_W, MPM_LIST_V, MPM_LIST_U, MPM_LIST_L, MPM_LIST_E, MPM_LIST_G 중 적어도 하나는 MPM_LIST_1, MPM_LIST_2, ... MPM_LIST_N 중 적어도 하나에 해당할 수 있다.The N MPM lists used for the current block may be expressed as MPM_LIST_1, MPM_LIST_2, ... MPM_LIST_N. At least one of the MPM_LIST_CUR, MPM_LIST_X, MPM_LIST_W, MPM_LIST_V, MPM_LIST_U, MPM_LIST_L, MPM_LIST_E, and MPM_LIST_G may correspond to at least one of MPM_LIST_1, MPM_LIST_2, ... MPM_LIST_N.
여기서, 각 MPM 리스트가 포함할 수 있는 화면 내 예측 모드의 개수는 C1, C2, ... CN로 표현될 수 있다. 여기서, N, C1, C2, ..., CN은 0 또는 양의 정수가 될 수 있다. C1 내지 CN의 일부 또는 전부는 같은 값 또는 다른 값일 수 있다. 또한, C1, C2, ... CN 중 적어도 하나는 부호화기 및 복호화기에서 미리 정해진 값일 수 있다. 또한, C1, C2, ... CN 중 적어도 하나는 각 해당 블록의 부호화 파라미터를 기반으로 결정될 수 있다. 또한, C1, C2, ... CN 중 적어도 하나는 엔트로피 부호화/복호화될 수 있다.Here, the number of intra prediction modes that each MPM list may include may be represented by C1, C2, ... CN. Here, N, C1, C2, ..., CN may be zero or a positive integer. Some or all of the C1 to CN may be the same value or different values. In addition, at least one of C1, C2, ... CN may be a predetermined value in the encoder and the decoder. In addition, at least one of C1, C2, ... CN may be determined based on an encoding parameter of each corresponding block. In addition, at least one of C1, C2, ... CN may be entropy encoded / decoded.
또한, 예를 들어, MPM_LIST_1 리스트에 포함되는 화면 내 예측 모드들은 MPM_LIST_1_MODE_1, MPM_LIST_1_MODE_2, ..., MPM_LIST_1_MODE_C1로 표현될 수 있다.Also, for example, intra prediction modes included in the MPM_LIST_1 list may be expressed as MPM_LIST_1_MODE_1, MPM_LIST_1_MODE_2, ..., MPM_LIST_1_MODE_C1.
MPM 리스트들 간에 중복되는 화면 내 예측 모드를 포함하지 않도록 하기 위해서, 순서가 늦은 MPM 리스트에 포함된 화면 내 예측 모드를 이용해서 순서가 빠른 MPM 리스트에 포함된 화면 내 예측 모드와의 중복성을 확인할 수 있다. 중복성 확인 후 중복되는 화면 내 예측 모드가 존재할 경우, 해당 화면 내 예측 모드는 MPM 리스트에서 제외될 수 있다. 또한, 중복되는 모드가 제외된 후, 소정의 화면 내 예측 모드가 해당 MPM 리스트에 추가될 수 있다.In order to not include overlapping intra prediction modes between MPM lists, the intra prediction mode included in the late order MPM list can be used to confirm the redundancy with the intra prediction modes included in the fast order MPM list. have. If there are overlapping intra prediction modes after checking redundancy, the intra prediction modes may be excluded from the MPM list. In addition, after the overlapping modes are excluded, a predetermined intra prediction mode may be added to the corresponding MPM list.
MPM 리스트들에 포함된 모드들에 대한 중복성 확인은 복수의 MPM 리스트를 구성하는 단계에서 수행될 수도 있다. 또는, 상기 중복성 확인은 이용되는 모든 복수의 MPM 리스트들을 구성한 후에 수행될 수도 있다. 또는, 상기 중복성 확인은 MPM 리스트에 화면 내 예측 모드가 포함될 때마다 수행될 수 있다.The redundancy check for the modes included in the MPM lists may be performed in constructing a plurality of MPM lists. Alternatively, the redundancy check may be performed after configuring all the plurality of MPM lists used. Alternatively, the redundancy check may be performed whenever the intra prediction mode is included in the MPM list.
예를 들어, 현재 블록의 MPM_LIST_1이 C1개의 화면 내 예측 모드를 가질 때, MPM_LIST_1의 화면 내 예측 모드들은 서로 중복되지 않는 MPM_LIST_1_MODE_1, MPM_LIST_1_MODE_2, ..., MPM_LIST_1_MODE_C1일 수 있다.For example, when the MPM_LIST_1 of the current block has C1 intra prediction modes, the intra prediction modes of the MPM_LIST_1 may be MPM_LIST_1_MODE_1, MPM_LIST_1_MODE_2, ..., MPM_LIST_1_MODE_C1 which do not overlap each other.
예를 들어, MPM_LIST_2가 서로 중복되지 않는 C2개의 화면 내 예측 모드를 포함할 때, MPM_LIST_2에 포함된 각 화면 내 예측 모드가 MPM_LIST_1에 포함된 화면 내 예측 모드들 중 적어도 하나와 중복되는지 확인할 수 있다.For example, when the MPM_LIST_2 includes C2 intra prediction modes that do not overlap each other, it may be checked whether the intra prediction modes included in the MPM_LIST_2 overlap with at least one of the intra prediction modes included in the MPM_LIST_1.
MPM_LIST_2에 포함된 화면 내 예측 모드인 MPM_LIST_2_MODE_X가 MPM_LIST_1에 포함된 모드와 중복될 경우, 해당 중복되는 화면 내 예측 모드인 MPM_LIST_2_MODE_X는 MPM_LIST_2에서 제외될 수 있다. 여기서, MPM_LIST_2_MODE_X는 MPM_LIST_2_MODE_1, MPM_LIST_2_MODE_2, ..., MPM_LIST_2_MODE_C2 중 적어도 하나일 수 있다.When the intra prediction mode MPM_LIST_2_MODE_X included in the MPM_LIST_2 overlaps with the mode included in the MPM_LIST_1, the overlapping intra prediction mode MPM_LIST_2_MODE_X may be excluded from the MPM_LIST_2. Here, MPM_LIST_2_MODE_X may be at least one of MPM_LIST_2_MODE_1, MPM_LIST_2_MODE_2, ..., MPM_LIST_2_MODE_C2.
예를 들어, MPM_LIST_2에서 적어도 하나의 화면 내 예측 모드가 제외되는 경우, 소정의 화면 내 예측 모드들 중 적어도 하나를 MPM_LIST_2에 포함시킬 수 있다. 이때, MPM_LIST_2에 포함되는 상기 소정의 화면 내 예측 모드들 중 적어도 하나는 MPM_LIST_1에 포함된 화면 내 예측 모드들 중 적어도 하나와 중복되지 않도록 할 수 있다. 또는, MPM_LIST_2에 포함되는 상기 소정의 화면 내 예측 모드들 중 적어도 하나는 MPM_LIST_1에 포함된 화면 내 예측 모드들 모두와 중복되지 않도록 할 수 있다.For example, when at least one intra prediction mode is excluded from the MPM_LIST_2, at least one of predetermined intra prediction modes may be included in the MPM_LIST_2. In this case, at least one of the predetermined intra prediction modes included in MPM_LIST_2 may not overlap with at least one of the intra prediction modes included in MPM_LIST_1. Alternatively, at least one of the predetermined intra prediction modes included in MPM_LIST_2 may not overlap with all of the intra prediction modes included in MPM_LIST_1.
상기 중복되는 화면 내 예측 모드들을 보충하기 위해 추가되는 소정의 화면 내 예측 모드들은, 예컨대, INTRA_PLANAR, INTRA_DC, 수평 모드, 수직 모드, 45도 모드, 135도 모드, 225도 모드 MPM_LIST_2_MODE_X±delta, INTRA_DM, INTRA_LM 등을 포함하는 화면 내 예측 모드들 중 적어도 하나 이상을 포함할 수 있다. 여기서, INTRA_DM은 색차 화면 내 예측 모드를 대응하는 휘도 화면 내 예측 모드와 동일하게 결정하는 화면 내 예측 모드를 의미할 수 있다. 또한, INTRA_LM은 색차 예측/잔여/복원 블록 중 적어도 하나를 휘도 예측/잔여/복원 블록 중 적어도 하나를 기반으로 생성하는 화면 내 예측 모드를 의미할 수 있다. 또한, delta는 양의 정수일 수 있다.Predetermined intra prediction modes added to supplement the overlapping intra prediction modes are, for example, INTRA_PLANAR, INTRA_DC, horizontal mode, vertical mode, 45 degree mode, 135 degree mode, 225 degree mode MPM_LIST_2_MODE_X ± delta, INTRA_DM, It may include at least one or more of intra prediction modes including INTRA_LM. Here, INTRA_DM may mean an intra prediction mode that determines the intra prediction mode of the chrominance screen to be identical to the intra prediction mode. In addition, INTRA_LM may refer to an intra prediction mode that generates at least one of the chrominance prediction / residual / recovery blocks based on at least one of the luminance prediction / residual / recovery blocks. Also, delta may be a positive integer.
예를 들어, MPM_LIST_2에 포함된 화면 내 예측 모드의 수가 C2개가 될 때까지, delta값을 1부터 1씩 계속 증가시키면서, 소정의 화면 내 예측 모드인 MPM_LIST_2_MODE_X±delta를 MPM_LIST_2에 포함시킬 수 있다. 또는, 상기 소정의 화면 내 예측 모드들을 일정한 순서에 따라 정렬하고, MPM_LIST_2에 포함된 화면 내 예측 모드의 수가 C2개가 될 때까지, 상기 순서대로 소정의 화면내 예측 모드들 중 적어도 하나 이상을 MPM_LIST_2에 포함시킬 수 있다.For example, the predetermined intra prediction mode MPM_LIST_2_MODE_X ± delta may be included in the MPM_LIST_2 while continuously increasing the delta value from 1 to 1 until the number of intra prediction modes included in the MPM_LIST_2 is C2. Alternatively, the predetermined intra prediction modes are arranged in a predetermined order, and at least one or more of the intra intra prediction modes are assigned to the MPM_LIST_2 in this order until the number of intra prediction modes included in the MPM_LIST_2 is C2. Can be included.
예를 들어, 현재 블록의 MPM_LIST_3가 서로 중복되지 않는 C3개의 화면 내 예측 모드를 포함할 때, MPM_LIST_3에 포함된 각 화면 내 예측 모드가 MPM_LIST_1 및 MPM_LIST_2에 포함된 화면 내 예측 모드들 중 적어도 하나와 중복되는지 확인할 수 있다.For example, when the MPM_LIST_3 of the current block includes C3 intra picture prediction modes that do not overlap each other, each intra picture prediction mode included in the MPM_LIST_3 overlaps with at least one of the intra picture prediction modes included in the MPM_LIST_1 and the MPM_LIST_2. You can check if
MPM_LIST_3에 포함된 화면 내 예측 모드인 MPM_LIST_3_MODE_X가 MPM_LIST_1 또는 MPM_LIST_2에 포함된 모드와 중복될 경우, 해당 중복되는 화면 내 예측 모드인 MPM_LIST_3_MODE_X는 MPM_LIST_3에서 제외될 수 있다. 여기서, MPM_LIST_3_MODE_X는 MPM_LIST_3_MODE_1, MPM_LIST_3_MODE_2, ..., MPM_LIST_3_MODE_C3 중 적어도 하나일 수 있다.When the intra prediction mode MPM_LIST_3_MODE_X included in the MPM_LIST_3 overlaps with the mode included in the MPM_LIST_1 or the MPM_LIST_2, the overlapping intra prediction mode MPM_LIST_3_MODE_X may be excluded from the MPM_LIST_3. Here, MPM_LIST_3_MODE_X may be at least one of MPM_LIST_3_MODE_1, MPM_LIST_3_MODE_2, ..., MPM_LIST_3_MODE_C3.
예를 들어, MPM_LIST_3에서 적어도 하나의 화면 내 예측 모드가 제외되는 경우, 소정의 화면 내 예측 모드들 중 적어도 하나를 MPM_LIST_3에 포함시킬 수 있다. 이때, MPM_LIST_3에 포함되는 상기 소정의 화면 내 예측 모드들 중 적어도 하나는 MPM_LIST_1 및 MPM_LIST_2에 포함된 화면 내 예측 모드들 중 적어도 하나와 중복되지 않도록 할 수 있다. 또는, MPM_LIST_3에 포함되는 상기 소정의 화면 내 예측 모드들 중 적어도 하나는 MPM_LIST_1 및 MPM_LIST_2에 포함된 화면 내 예측 모드들 모두와 중복되지 않도록 할 수 있다.For example, when at least one intra prediction mode is excluded from the MPM_LIST_3, at least one of predetermined intra prediction modes may be included in the MPM_LIST_3. In this case, at least one of the predetermined intra prediction modes included in the MPM_LIST_3 may not overlap with at least one of the intra prediction modes included in the MPM_LIST_1 and the MPM_LIST_2. Alternatively, at least one of the predetermined intra prediction modes included in MPM_LIST_3 may not overlap with all of the intra prediction modes included in MPM_LIST_1 and MPM_LIST_2.
예를 들어, MPM_LIST_3에 포함된 화면 내 예측 모드의 수가 C3개가 될 때까지, delta값을 1부터 1씩 계속 증가시키면서, 소정의 화면 내 예측 모드인 MPM_LIST_3_MODE_X±delta를 MPM_LIST_3에 포함시킬 수 있다. 또는, 상기 소정의 화면 내 예측 모드들을 일정한 순서에 따라 정렬하고, MPM_LIST_3에 포함된 화면 내 예측 모드의 수가 C3개가 될 때까지, 상기 순서대로 소정의 화면 내 예측 모드들 중 적어도 하나 이상을 MPM_LIST_3에 포함시킬 수 있다.For example, the predetermined intra prediction mode MPM_LIST_3_MODE_X ± delta may be included in the MPM_LIST_3 while the delta value is continuously increased from 1 to 1 until the number of intra prediction modes included in the MPM_LIST_3 is C3. Alternatively, the predetermined intra prediction modes are arranged in a predetermined order, and at least one or more of the intra prediction modes in the order are assigned to the MPM_LIST_3 until the number of intra prediction modes included in the MPM_LIST_3 is C3. Can be included.
예를 들어, 현재 블록의 MPM_LIST_K가 서로 중복되지 않는 CK개의 화면 내 예측 모드를 포함할 때, MPM_LIST_K에 포함된 각 화면 내 예측 모드가 MPM_LIST_1, MPM_LIST_2,... MPM_LIST_(K-1)의 화면 내 예측 모드들 중 적어도 하나와 중복되는지 확인할 수 있다. 여기서, K는 현재 블록이 가질 수 있는 최대 MPM 리스트 개수인 N보다 작거나 같은 양의 정수일 수 있다.For example, when the MPM_LIST_K of the current block includes CK intra-picture prediction modes that do not overlap each other, the intra-prediction modes included in the MPM_LIST_K are in-screen of MPM_LIST_1, MPM_LIST_2, ... MPM_LIST_ (K-1). It may be checked whether the data overlaps with at least one of the prediction modes. Here, K may be a positive integer less than or equal to N, the maximum number of MPM lists that the current block may have.
MPM_LIST_K에 포함된 화면 내 예측 모드인 MPM_LIST_K_MODE_X가 MPM_LIST_1, MPM_LIST_2,... MPM_LIST_(K-1) 중 적어도 하나에 포함된 모드와 중복될 경우, 해당 중복되는 화면 내 예측 모드인 MPM_LIST_K_MODE_X는 MPM_LIST_K에서 제외될 수 있다. 여기서, MPM_LIST_K_MODE_X는 MPM_LIST_K_MODE_1, MPM_LIST_K_MODE_2, ..., MPM_LIST_K_MODE_CK 중 적어도 하나일 수 있다.If the on-screen prediction mode MPM_LIST_K_MODE_X included in MPM_LIST_K overlaps with the mode included in at least one of MPM_LIST_1, MPM_LIST_2, ... MPM_LIST_ (K-1), the corresponding in-picture prediction mode MPM_LIST_K_MODE_X is excluded from MPM_LIST_K. Can be. Here, MPM_LIST_K_MODE_X may be at least one of MPM_LIST_K_MODE_1, MPM_LIST_K_MODE_2, ..., MPM_LIST_K_MODE_CK.
예를 들어, MPM_LIST_K에서 적어도 하나의 화면 내 예측 모드가 제외되는 경우, 소정의 화면 내 예측 모드들 중 적어도 하나를 MPM_LIST_K에 포함시킬 수 있다. 이때, MPM_LIST_K에 포함되는 상기 소정의 화면 내 예측 모드들 중 적어도 하나는 MPM_LIST_1, MPM_LIST_2, ..., 및 MPM_LIST_(K-1)에 포함된 화면 내 예측 모드들 중 적어도 하나와 중복되지 않도록 할 수 있다. 또는, MPM_LIST_K에 포함되는 상기 소정의 화면 내 예측 모드들 중 적어도 하나는 MPM_LIST_1, MPM_LIST_2, ..., 및 MPM_LIST_(K-1)에 포함된 화면 내 예측 모드들 모두와 중복되지 않도록 할 수 있다. For example, when at least one intra prediction mode is excluded from the MPM_LIST_K, at least one of predetermined intra prediction modes may be included in the MPM_LIST_K. In this case, at least one of the predetermined intra prediction modes included in MPM_LIST_K may not overlap with at least one of the intra prediction modes included in MPM_LIST_1, MPM_LIST_2, ..., and MPM_LIST_ (K-1). have. Alternatively, at least one of the predetermined intra prediction modes included in MPM_LIST_K may not overlap with all intra prediction modes included in MPM_LIST_1, MPM_LIST_2, ..., and MPM_LIST_ (K-1).
예를 들어, MPM_LIST_K에서 제외된 화면 내 예측 모드를 보충하기 위해, 소정의 화면 내 예측 모드들 중 적어도 하나 이상에 대해 MPM_LIST_1, MPM_LIST_2, ... 및 MPM_LIST_(K-1)에 포함된 화면 내 예측 모드들 중 적어도 하나 또는 모두와 중복되지 않는 소정의 화면 내 예측 모드가 있는 경우, 해당 소정의 화면 내 예측 모드를 MPM_LIST_K의 화면 내 예측 모드로 추가할 수 있다.For example, to supplement the intra prediction mode excluded from MPM_LIST_K, the intra prediction included in MPM_LIST_1, MPM_LIST_2, ..., and MPM_LIST_ (K-1) for at least one or more of the predetermined intra prediction modes. If there is a predetermined intra prediction mode that does not overlap at least one or all of the modes, the predetermined intra prediction mode may be added as the intra prediction mode of MPM_LIST_K.
예를 들어, MPM_LIST_K에 포함된 화면 내 예측 모드의 수가 CK개가 될 때까지, delta값을 1부터 1씩 계속 증가시키면서, 소정의 화면 내 예측 모드인 MPM_LIST_K_MODE_X±delta를 MPM_LIST_K에 포함시킬 수 있다. 또는, 상기 소정의 화면 내 예측 모드들을 일정한 순서에 따라 정렬하고, MPM_LIST_K에 포함된 화면 내 예측 모드의 수가 CK개가 될 때까지, 상기 순서대로 소정의 화면 내 예측 모드들 중 적어도 하나 이상을 MPM_LIST_K에 포함시킬 수 있다.For example, the predetermined intra prediction mode MPM_LIST_K_MODE_X ± delta may be included in the MPM_LIST_K, while the delta value is continuously increased from 1 to 1 until the number of intra prediction modes included in the MPM_LIST_K becomes CK. Alternatively, the predetermined intra prediction modes are arranged in a predetermined order, and at least one or more of the intra prediction modes in the order are assigned to the MPM_LIST_K until the number of intra prediction modes included in the MPM_LIST_K becomes CK. Can be included.
N개의 MPM 리스트를 이용하여, 현재 블록의 화면 내 예측 모드를 유도하거나, 현재 블록의 화면 내 예측 모드를 엔트로피 부호화/복호화할 때, 상기 N개의 MPM 리스트의 각각에 포함된 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 존재하는지 여부를 나타내는 지시자(MPM flag)를 상기 N개의 MPM 리스트의 각각에 대해 엔트로피 부호화/복호화할 수 있다.Among the intra prediction modes included in each of the N MPM lists, the N MPM list is used to derive the intra prediction mode of the current block or entropy encode / decode the intra prediction mode of the current block. An indicator (MPM flag) indicating whether the same intra prediction mode as the intra prediction mode of the current block exists may be entropy encoded / decoded for each of the N MPM lists.
예를 들어, N개의 MPM 리스트가 사용되는 경우, 각 MPM 리스트 별로 MPM_FLAG_1, MPM_FLAG_2, ... MPM_FLAG_N와 같이, 최대 N개 지시자가 부호화/복호화될 수 있다. 또는, 최대 (N-1)개의 지시자가 부호화/복호화될 수도 있으며, 이 경우, 상기 지시자가 부호화/복호화되지 않는 하나의 MPM 리스트에 대한 지시자는 (N-1)개의 지시자의 일부 또는 전부의 값에 기초하여 유도될 수 있다. 예컨대, N개의 MPM 리스트 중 임의의 MPM 리스트(예컨대, 소정의 순서에 따른 마지막 MPM 리스트)에 대해서는 상기 지시자가 부호화/복호화되지 않을 수 있다. 특정 MPM 리스트 내 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 모드가 존재하는 경우, 특정 MPM 리스트에 대한 상기 지시자는 제1 값을 가질 수 있고, 동일한 모드가 존재하지 않는 경우 제2 값을 가질 수 있다. 이때, 제1 값은 1일 있고, 제2 값은 0일 수 있다. 즉, 상기 지시자는 플래그(flag) 정보일 수 있다.For example, when N MPM lists are used, up to N indicators may be encoded / decoded, such as MPM_FLAG_1, MPM_FLAG_2, ... MPM_FLAG_N, for each MPM list. Alternatively, at most (N-1) indicators may be encoded / decoded, in which case, the indicator for one MPM list in which the indicator is not encoded / decoded may be the value of some or all of the (N-1) indicators. Can be derived based on. For example, the indicator may not be encoded / decoded for any of the N MPM lists (eg, the last MPM list in a predetermined order). When the same mode as the intra prediction mode of the current block among the intra prediction modes in the specific MPM list exists, the indicator for the specific MPM list may have a first value, and the second mode when the same mode does not exist. It can have a value. In this case, the first value may be 1 and the second value may be 0. That is, the indicator may be flag information.
또한, N개의 상기 지시자들 중 특정 MPM 리스트에 대한 상기 지시자가 제1 값을 가질 경우, 상기 특정 MPM 리스트에 대한 상기 지시자를 제외한 나머지 MPM 리스트들에 대한 지시자들은 모두 제2 값을 가질 수 있다. In addition, when the indicator for a specific MPM list of the N indicators has a first value, all of the indicators for the other MPM lists except for the indicator for the specific MPM list may have a second value.
또한, N개의 상기 지시자들 중 K번째 MPM 리스트에 대한 상기 지시자가 제1 값을 가질 경우, K+1번째 MPM 리스트부터 N번째 MPM 리스트까지에 대한 상기 지시자는 엔트로피 부호화/복호화되지 않을 수 있다. 이때, K는 1이상이고 N 이하인 양의 정수일 수 있다.In addition, when the indicator for the K-th MPM list among the N indicators has a first value, the indicators for the K + 1-th MPM list to the N-th MPM list may not be entropy encoded / decoded. In this case, K may be a positive integer greater than or equal to 1 and less than or equal to N.
상기 N개의 MPM 리스트 중 특정 MPM 리스트에 포함된 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 존재할 경우, 특정 MPM 리스트 내에서의 상기 화면 내 예측 모드의 위치 혹은 순서에 대한 색인(index) 정보(MPM index)를 엔트로피 부호화할 수 있다. 또한, 상기 색인 정보를 엔트로피 복호화하여, 특정 MPM 리스트에 포함된 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드를 식별할 수 있다. 상기 색인 정보는 고정 길이 부호 혹은 가변 길이 부호로 엔트로피 부호화/복호화될 수 있다. 또한, 상기 색인 정보를 이용해서 현재 블록의 화면 내 예측 모드를 유도할 수 있다.If there is an intra prediction mode identical to the intra prediction mode of the current block among the intra prediction modes included in the specific MPM list among the N MPM lists, the position or order of the intra prediction mode in the specific MPM list Entropy encoding may be applied to index information (MPM index) for. In addition, the index information may be entropy decoded to identify an intra prediction mode that is identical to an intra prediction mode of the current block among intra prediction modes included in a specific MPM list. The index information may be entropy encoded / decoded by a fixed length code or a variable length code. In addition, the index information may be used to derive an intra prediction mode of the current block.
상기 N개의 MPM 리스트에 포함된 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 존재하지 않을 경우, 부호화기에서 현재 블록의 잔여 화면 내 예측 모드(remaining intra prediction mode)를 엔트로피 부호화할 수 있다. 이때, 잔여 화면 내 예측 모드는 MPM 리스트들 중 적어도 하나 이상에 포함되지 않은 현재 블록의 화면 내 예측 모드를 식별하기 위해서 사용될 수 있다. 또는, 잔여 화면 내 예측 모드는 MPM 리스트들의 모든 후보 화면 내 예측 모드들에 포함되지 않은 현재 블록의 화면 내 예측 모드를 식별하기 위해서 사용될 수 있다. If there is no intra prediction mode identical to the intra prediction mode of the current block among the intra prediction modes included in the N MPM lists, the encoder determines the remaining intra prediction mode of the current block. Entropy can be coded. In this case, the residual intra prediction mode may be used to identify the intra prediction mode of the current block that is not included in at least one of the MPM lists. Alternatively, the residual intra prediction mode may be used to identify the intra prediction mode of the current block that is not included in all candidate intra prediction modes of the MPM lists.
이때, 화면 내 예측 모드의 총 개수가 Y개 이고, 현재 블록에 대한 N개의 MPM 리스트들에 포함된 모든 화면 내 예측 모드들의 개수의 합이 X일 때, Y에서 X를 뺀 Y-X개의 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드를 지시하는 잔여 화면 내 예측 모드를 엔트로피 부호화할 수 있다. 이때, N개의 MPM 리스트들에 포함된 총 X개의 화면 내 예측 모드들을 화면 내 예측 모드의 크기, 각도, 순서 및 식별 번호 중 적어도 하나 이상에 기초하여 정렬할 수 있다. 상기 정렬은 오름차순 정렬 또는 내림차순 정렬일 수 있다. 상기 정렬된 X개의 화면 내 예측 모드들과 현재 블록의 화면 내 예측 모드가 비교될 수 있다. 상기 비교 결과, 현재 블록의 화면 내 예측 모드가 더 큰 경우 현재 블록의 화면 내 예측 모드 값에서 특정 값을 감산할 수 있다. 상기 특정 값은 1일 수 있다. In this case, when the total number of intra prediction modes is Y, and the sum of the number of all intra prediction modes included in the N MPM lists for the current block is X, Y X intra predictions minus X is obtained. Among the modes, entropy encoding may be performed on the remaining intra prediction mode indicating the same intra prediction mode as the intra prediction mode of the current block. In this case, the total X intra prediction modes included in the N MPM lists may be arranged based on at least one or more of the size, angle, order, and identification number of the intra prediction modes. The sorting can be ascending sorting or descending sorting. The aligned X intra prediction modes may be compared with the intra prediction modes of the current block. As a result of the comparison, when the intra prediction mode of the current block is larger, a specific value may be subtracted from the intra prediction mode value of the current block. The specific value may be 1.
또는, 예를 들어, 상기 정렬된 X 개의 화면 내 예측 모드들 중 가장 큰 기준값(예컨대, 화면 내 예측 모드의 크기, 각도, 순서 및 식별 번호 중 적어도 하나)을 가지는 모드와 현재 블록의 화면 내 예측 모드가 비교될 수 있다. 상기 비교 결과, 현재 블록의 화면 내 예측 모드의 값이 더 큰 경우 현재 블록의 화면 내 예측 모드 값에서 특정 값을 감산할 수 있다. Or, for example, the mode having the largest reference value of the sorted X intra prediction modes (eg, at least one of the size, angle, order, and identification number of the intra prediction mode) and the intra prediction of the current block. The modes can be compared. As a result of the comparison, when the intra prediction mode value of the current block is larger, a specific value may be subtracted from the intra prediction mode value of the current block.
또한, 상기 정렬된 X개의 화면 내 예측 모드들 중 두번째 큰 기준값을 가지는 모드와 상기 특정 값으로 감산된 현재 블록의 화면 내 예측 모드를 비교할 수 있다. 상기 비교 결과, 감산된 현재 블록의 화면 내 예측 모드가 더 큰 경우 상기 감산된 현재 블록의 화면 내 예측 모드 값에서 상기 특정 값을 추가적으로 감산할 수 있다. In addition, the mode having the second largest reference value among the sorted X intra prediction modes may be compared with the intra prediction mode of the current block subtracted by the specific value. As a result of the comparison, when the intra prediction mode of the subtracted current block is larger, the specific value may be further subtracted from the sub intra prediction mode value of the current block.
상기 정렬된 X개의 화면 내 예측 모드들 중 가장 작은 기준값을 갖는 모드까지 상기 비교에 기초한 감산을 반복 수행할 수 있다. 최종적으로 감산된 현재 블록의 화면 내 예측 모드 값이 잔여 화면 내 예측 모드로 엔트로피 부호화될 수 있다.Subtraction based on the comparison may be repeated until the mode having the smallest reference value among the sorted X intra prediction modes. Finally, the intra prediction mode value of the subtracted current block may be entropy encoded into the residual intra prediction mode.
현재 블록의 잔여 화면 내 예측 모드는 엔트로피 복호화되어, 상기 N개의 MPM 리스트에 포함되지 않은 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드를 식별하는데 사용될 수 있다. 이때, 화면 내 예측 모드의 총 개수가 Y개 이고, 현재 블록에 대한 N개의 MPM 리스트들이 가지는 총 화면 내 예측 모드 개수의 합이 X일 때, Y에서 X만큼의 화면 내 예측 모드 개수를 제외시킨 Y-X개의 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드를 지시하는 잔여 화면 내 예측 모드를 엔트로피 복호화할 수 있다. The intra intra prediction mode of the current block may be entropy decoded and used to identify the intra intra prediction mode that is the same as the intra prediction mode of the current block among intra prediction modes not included in the N MPM lists. In this case, when the total number of intra prediction modes is Y and the sum of the total intra prediction modes of the N MPM lists for the current block is X, the number of intra prediction modes is excluded from Y by X. It is possible to entropy decode a residual intra prediction mode indicating the same intra prediction mode as the intra prediction mode of the current block among the YX intra prediction modes.
상기 잔여 화면 내 예측 모드를 엔트로피 복호화한 후, X개의 화면 내 예측 모드는 화면 내 예측 모드의 크기, 각도, 순서 및 식별 번호 중 적어도 하나 이상에 기초하여 정렬될 수 있다. 상기 정렬은 오름차순 정렬 또는 내림차순 정렬일 수 있다. 상기 엔트로피 복호화된 잔여 화면 내 예측 모드는 상기 X개의 화면 내 예측 모드 값들과 비교될 수 있다. 상기 비교 결과, 상기 엔트로피 복호화된 잔여 화면 내 예측 모드 값이 더 크거나 같을 경우, 상기 엔트로피 복호화된 잔여 화면 내 예측 모드 값을 특정 값으로 증가시킬 수 있다. 상기 특정 값은 1일 수 있다.After entropy decoding the residual intra prediction mode, the X intra prediction modes may be aligned based on at least one or more of the size, angle, order, and identification number of the intra prediction mode. The sorting can be ascending sorting or descending sorting. The entropy decoded residual intra prediction mode may be compared with the X intra prediction modes. As a result of the comparison, when the entropy decoded residual picture prediction mode value is greater than or equal to, the entropy decoded residual picture prediction mode value may be increased to a specific value. The specific value may be 1.
또는, 예를 들어, 상기 정렬된 X개의 화면 내 예측 모드들 중 가장 작은 기준값(예컨대, 화면 내 예측 모드의 크기, 각도, 순서 및 식별 번호 중 적어도 하나)을 가지는 모드와 복호화된 잔여 화면 내 예측 모드가 비교될 수 있다. 상기 비교 결과, 잔여 화면 내 예측 모드의 값이 더 크거나 같은 경우, 잔여 화면 내 예측 모드 값에서 특정 값을 가산할 수 있다. Or, for example, the mode having the smallest reference value of the sorted X intra prediction modes (eg, at least one of the size, angle, order, and identification number of the intra prediction mode) and the decoded residual intra prediction The modes can be compared. As a result of the comparison, when a value of the prediction mode in the residual picture is greater than or equal to a value, a specific value may be added to the prediction mode value in the remaining picture.
또한, 상기 정렬된 X개의 화면 내 예측 모드들 중 두번째 작은 기준값을 가지는 모드와 상기 특정 값으로 가산된 잔여 화면 내 예측 모드를 비교할 수 있다. 상기 비교 결과, 가산된 잔여 화면 내 예측 모드가 더 크거나 같은 경우 상기 가산된 잔여 화면 내 예측 모드 값에서 상기 특정 값을 추가적으로 가산할 수 있다. In addition, the mode having the second smallest reference value among the sorted X intra prediction modes may be compared with the residual intra prediction mode added to the specific value. As a result of the comparison, when the prediction mode within the added residual picture is larger than or equal to the prediction mode, the specific value may be additionally added from the added residual prediction mode value.
상기 정렬된 X개의 화면 내 예측 모드들 중 가장 큰 기준값을 갖는 모드까지 상기 비교에 기초한 가산을 반복 수행할 수 있다. 최종적으로 가산된 잔여 화면 내 예측 모드 값을 현재 블록의 화면 내 예측 모드로 엔트로피 복호화할 수있다.The addition based on the comparison may be repeated until the mode having the largest reference value among the sorted X intra prediction modes. Finally, the added residual intra prediction mode value may be entropy decoded into the intra prediction mode of the current block.
상기 N개의 MPM 리스트를 사용하는 현재 블록의 화면 내 예측 모드를 엔트로피 부호화/복호화하는 방법은 아래의 실시예와 같이 수행될 수 있다.A method of entropy encoding / decoding an intra prediction mode of a current block using the N MPM lists may be performed as described below.
먼저, 현재 블록에 대해 1개의 MPM 리스트가 사용되는 경우의 실시예를 설명한다.First, an embodiment in the case where one MPM list is used for the current block will be described.
부호화기는, MPM_LIST_1에 포함된 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 존재할 경우, 부호화기는 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1에 존재하는지 여부를 나타내는 지시자 MPM_FLAG_1를 제1 값으로 하여 엔트로피 부호화할 수 있다. MPM_FLAG_1가 제1 값인 경우, 상기 색인 정보인 MPM_IDX_1를 추가적으로 엔트로피 부호화할 수 있다.If the encoder has the same intra prediction mode as the intra prediction mode of the current block among the intra prediction modes included in the MPM_LIST_1, the encoder determines whether the same intra prediction mode as the intra prediction mode of the current block exists in the MPM_LIST_1. Entropy encoding may be performed using the indicator MPM_FLAG_1 indicating whether the first value is the first value. When MPM_FLAG_1 is the first value, the index information MPM_IDX_1 may be additionally entropy encoded.
부호화기는, MPM_LIST_1에 포함된 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 존재하지 않을 경우, 부호화기는 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1에 존재하는지 여부를 나타내는 지시자 MPM_FLAG_1를 제2 값으로 엔트로피 부호화할 수 있다. MPM_FLAG_1가 제2 값인 경우, 상기 잔여 화면 내 예측 모드인 REM_MODE를 추가적으로 엔트로피 부호화할 수 있다.If the encoder does not have an intra prediction mode that is identical to the intra prediction mode of the current block among the intra prediction modes included in the MPM_LIST_1, the encoder is configured to have the same intra prediction mode as the intra prediction mode of the current block in the MPM_LIST_1. An indicator MPM_FLAG_1 indicating whether there is an entropy may be encoded with a second value. When MPM_FLAG_1 is the second value, the remaining intra prediction mode REM_MODE may be additionally entropy encoded.
복호화기는, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1에 존재하는지 여부를 나타내는 지시자 MPM_FLAG_1를 엔트로피 복호화할 수 있다. MPM_FLAG_1가 제1 값인 경우, 상기 색인 정보인 MPM_IDX_1를 추가적으로 엔트로피 복호화하여, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. The decoder may entropy decode the indicator MPM_FLAG_1 indicating whether the same intra prediction mode as the intra prediction mode of the current block exists in MPM_LIST_1. When MPM_FLAG_1 is the first value, the index information MPM_IDX_1 may be additionally entropy decoded to derive an intra prediction mode of the current block.
MPM_FLAG_1가 제2 값인 경우, 상기 잔여 화면 내 예측 모드인 REM_MODE를 추가적으로 엔트로피 복호화하여, 현재 블록의 화면 내 예측 모드를 유도할 수 있다.When MPM_FLAG_1 is the second value, the remaining intra prediction mode REM_MODE may be additionally entropy decoded to derive the intra prediction mode of the current block.
이하, 현재 블록에 대해 2개의 MPM 리스트를 사용하는 실시예를 설명한다.Hereinafter, an embodiment of using two MPM lists for the current block will be described.
부호화기는, MPM_LIST_1 및 MPM_LIST_2에 포함된 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 존재할 경우, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1 및 MPM_LIST_2 중 어떤 MPM 리스트에 존재하는지 여부를 나타내는 지시자 MPM_FLAG_1 및 MPM_FLAG_2를 엔트로피 부호화할 수 있다. 현재 블록의 화면 내 예측 모드가 MPM_LIST_1에 존재하는 경우, MPM_FLAG_1은 제1 값이고, MPM_FLAG_2는 제2 값일 수 있다. 이 경우, 상기 MPM_LIST_1에 대한 색인 정보인 MPM_IDX_1이 추가적으로 엔트로피 부호화될 수 있다. 또는, 현재 블록의 화면 내 예측 모드가 MPM_LIST_2에 존재하는 경우, MPM_FLAG_1은 제2 값이고 MPM_FLAG_2는 제1 값일 수 있다. 이 경우, 상기 MPM_LIST_2에 대한 색인 정보인 MPM_IDX_2가 추가적으로 엔트로피 부호화될 수 있다.If the encoder has the same intra prediction mode as the intra prediction mode of the current block among the intra prediction modes included in the MPM_LIST_1 and the MPM_LIST_2, the same intra prediction mode as the intra prediction mode of the current block is one of the MPM_LIST_1 and the MPM_LIST_2. It is possible to entropy encode the indicators MPM_FLAG_1 and MPM_FLAG_2 indicating which MPM lists exist. When the intra prediction mode of the current block exists in MPM_LIST_1, MPM_FLAG_1 may be a first value and MPM_FLAG_2 may be a second value. In this case, MPM_IDX_1, which is index information of the MPM_LIST_1, may be additionally entropy encoded. Alternatively, when the intra prediction mode of the current block exists in MPM_LIST_2, MPM_FLAG_1 may be the second value and MPM_FLAG_2 may be the first value. In this case, MPM_IDX_2, which is index information of the MPM_LIST_2, may be additionally entropy encoded.
부호화기는, MPM_LIST_1 및 MPM_LIST_2에 포함된 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 존재하지 않을 경우, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1 및 MPM_LIST_2 중 어떤 MPM 리스트에 존재하는지 여부를 나타내는 지시자 MPM_FLAG_1 및 MPM_FLAG_2를 제2 값으로 하여 엔트로피 부호화할 수 있다. MPM_FLAG_1 및 MPM_FLAG_2가 제2 값인 경우, 상기 잔여 화면 내 예측 모드인 REM_MODE가 추가적으로 엔트로피 부호화될 수 있다.When the encoder does not have the same intra prediction mode as the intra prediction mode of the current block among the intra prediction modes included in the MPM_LIST_1 and the MPM_LIST_2, the encoder may have the same intra prediction modes as the MPM_LIST_1 and the intra prediction modes of the current block. Entropy encoding may be performed using the indicators MPM_FLAG_1 and MPM_FLAG_2 indicating whether any MPM list in the MPM_LIST_2 is present as a second value. When MPM_FLAG_1 and MPM_FLAG_2 are the second values, REM_MODE, which is the prediction mode in the residual picture, may be additionally entropy encoded.
복호화기는, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1 및 MPM_LIST_2 중 어떤 MPM 리스트에 존재하는지 여부를 나타내는 지시자 MPM_FLAG_1 및 MPM_FLAG_2를 엔트로피 복호화할 수 있다. MPM_FLAG_1가 제1 값이고 MPM_FLAG_2가 제2 값인 경우, 현재 블록의 화면 내 예측 모드가 MPM_LIST_1에 존재하며, 복호화기는 상기 MPM_LIST_1에 대한 색인 정보인 MPM_IDX_1를 추가적으로 엔트로피 복호화하여, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. 또는, MPM_FLAG_1가 제2 값이고 MPM_FLAG_2가 제1 값인 경우, 현재 블록의 화면 내 예측 모드가 MPM_LIST_2에 존재하며, 복호화기는 상기 MPM_LIST_2에 대한 색인 정보인 MPM_IDX_2를 추가적으로 엔트로피 복호화하여, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. 또는, MPM_FLAG_1 및 MPM_FLAG_2가 제2 값인 경우, 복호화기는 상기 잔여 화면 내 예측 모드인 REM_MODE를 추가적으로 엔트로피 복호화하여, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. 이때, MPM_FLAG_1 및 MPM_FLAG_2가 모두 제1 값인 경우는 발생하지 않을 수 있다.The decoder may entropy decode the indicators MPM_FLAG_1 and MPM_FLAG_2 indicating whether the same intra prediction mode as the intra prediction mode of the current block exists in the MPM list of the MPM_LIST_1 and the MPM_LIST_2. If MPM_FLAG_1 is the first value and MPM_FLAG_2 is the second value, the intra prediction mode of the current block is present in MPM_LIST_1, and the decoder additionally entropy decodes MPM_IDX_1, which is index information for the MPM_LIST_1, to determine the intra prediction mode of the current block. Can be induced. Alternatively, when MPM_FLAG_1 is the second value and MPM_FLAG_2 is the first value, the intra prediction mode of the current block is present in the MPM_LIST_2, and the decoder additionally entropy decodes the MPM_IDX_2, which is index information for the MPM_LIST_2, to predict the intra prediction of the current block. Induce mode. Alternatively, when MPM_FLAG_1 and MPM_FLAG_2 are the second values, the decoder may additionally entropy decode the REM_MODE, which is the residual intra prediction mode, to derive the intra prediction mode of the current block. At this time, the case where both MPM_FLAG_1 and MPM_FLAG_2 are the first value may not occur.
이하, 현재 블록에 대해 2개의 MPM 리스트를 사용하는 다른 실시예를 설명한다.Hereinafter, another embodiment of using two MPM lists for the current block will be described.

상기 표 5의 예와 같이, 부호화기는 상기 복수 개의 MPM 리스트들을 구성하는 순서들 중 적어도 하나의 방법에 따라, MPM_LIST_1부터 MPM_LIST_2까지 각 MPM 리스트에 포함된 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 존재하는지를 순차적으로 확인함으로써 현재 블록의 화면 내 예측 모드를 엔트로피 부호화할 수 있다.As shown in the example of Table 5, the encoder according to at least one method of configuring the plurality of MPM lists, in-screen prediction of the current block of the intra prediction modes included in each MPM list from MPM_LIST_1 to MPM_LIST_2 By sequentially checking whether the same intra prediction mode as the mode exists, the intra prediction mode of the current block may be entropy encoded.
예를 들어, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1에 존재하는 경우, MPM_FLAG_1는 제1 값으로 엔트로피 부호화될 수 있다. 이때, 상기 MPM_LIST_1에 대한 색인 정보인 MPM_IDX_1이 추가적으로 엔트로피 부호화될 수 있다.For example, when the same intra prediction mode as the intra prediction mode of the current block exists in the MPM_LIST_1, the MPM_FLAG_1 may be entropy encoded with the first value. In this case, MPM_IDX_1, which is index information of the MPM_LIST_1, may be additionally entropy encoded.
예를 들어, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1에 존재하지 않는 경우, MPM_FLAG_1은 제2 값으로 엔트로피 부호화될 수 있다. 이때, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_2에 존재할 경우(MPM_FLAG_1가 제2 값인 경우), MPM_FLAG_2은 제1 값으로 엔트로피 부호화될 수 있다. 이때, 상기 MPM_LIST_2에 대한 색인 정보인 MPM_IDX_2가 추가적으로 엔트로피 부호화될 수 있다. For example, when the same intra prediction mode as the intra prediction mode of the current block does not exist in the MPM_LIST_1, the MPM_FLAG_1 may be entropy encoded with the second value. In this case, when the same intra prediction mode as the intra prediction mode of the current block exists in the MPM_LIST_2 (where MPM_FLAG_1 is the second value), the MPM_FLAG_2 may be entropy encoded with the first value. In this case, MPM_IDX_2, which is index information of the MPM_LIST_2, may be additionally entropy encoded.
예를 들어, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1 및 MPM_LIST_2에 존재하지 않는 경우, MPM_FLAG_1 및 MPM_FLAG_2는 제2 값으로 엔트로피 부호화될 수 있다. 이때(MPM_FLAG_1 및 MPM_FLAG_2가 제2 값인 경우), 상기 잔여 화면 내 예측 모드인 REM_MODE가 추가적으로 엔트로피 부호화될 수 있다.For example, if the same intra prediction mode as the intra prediction mode of the current block does not exist in the MPM_LIST_1 and the MPM_LIST_2, the MPM_FLAG_1 and the MPM_FLAG_2 may be entropy encoded with the second value. At this time (when MPM_FLAG_1 and MPM_FLAG_2 are the second values), REM_MODE, which is the prediction mode of the residual picture, may be additionally entropy encoded.
상기 표 5의 예와 같이, 복호화기는 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1 및 MPM_LIST_2 중 어떤 MPM 리스트에 존재하는지 여부를 나타내는 지시자 MPM_FLAG_1 및/또는 MPM_FLAG_2를 상기 복수 개의 MPM 리스트를 구성하는 순서들 중 적어도 하나의 방법에 따라 순차적으로 엔트로피 복호화할 수 있다. As shown in the example of Table 5, the decoder uses the MPM_FLAG_1 and / or MPM_FLAG_2 indicators indicating whether the same intra prediction mode as the intra prediction mode of the current block exists in MPM_LIST_1 and MPM_LIST_2. Entropy decoding may be performed sequentially according to at least one method of constituting sequences.
예를 들어, MPM_FLAG_1가 제1 값으로 엔트로피 복호화되는 경우, 현재 블록의 화면 내 예측 모드는 MPM_LIST_1에 존재하며, 상기 MPM_LIST_1에 대한 색인 정보인 MPM_IDX_1이 추가적으로 엔트로피 복호화되어, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. For example, when MPM_FLAG_1 is entropy decoded to a first value, the intra prediction mode of the current block is present in MPM_LIST_1, and MPM_IDX_1, which is index information for the MPM_LIST_1, is additionally entropy decoded to determine the intra prediction mode of the current block. Can be induced.
예를 들어, MPM_FLAG_1가 제2 값으로 엔트로피 복호화되는 경우, MPM_FLAG_2가 엔트로피 복호화될 수 있다. 상기 복호화된 MPM_FLAG_2가 제1 값인 경우, 현재 블록의 화면 내 예측 모드는 MPM_LIST_2에 존재하며, 상기 MPM_LIST_2에 대한 색인 정보인 MPM_IDX_2가 추가적으로 엔트로피 복호화되어, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. For example, when MPM_FLAG_1 is entropy decoded to a second value, MPM_FLAG_2 may be entropy decoded. When the decoded MPM_FLAG_2 is the first value, the intra prediction mode of the current block is present in the MPM_LIST_2, and MPM_IDX_2, which is index information of the MPM_LIST_2, is additionally entropy decoded to derive the intra prediction mode of the current block.
예를 들어, MPM_FLAG_1 및 MPM_FLAG_2가 제2 값으로 엔트로피 복호화되는 경우, 상기 잔여 화면 내 예측 모드인 REM_MODE가 추가적으로 엔트로피 복호화되어, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. 이때, MPM_FLAG_1 및 MPM_FLAG_2가 제1 값인지 혹은 제2 값인지를 확인하는 단계는 순차적으로 수행될 수 있다. For example, when MPM_FLAG_1 and MPM_FLAG_2 are entropy decoded to a second value, REM_MODE, which is the residual intra prediction mode, may be additionally entropy decoded to derive the intra prediction mode of the current block. At this time, the step of checking whether the MPM_FLAG_1 and the MPM_FLAG_2 is the first value or the second value may be sequentially performed.
이하, 현재 블록에 대해 N개의 MPM 리스트를 사용하는 실시예를 설명한다.Hereinafter, an embodiment of using N MPM lists for the current block will be described.
부호화기는, MPM_LIST_1, MPM_LIST_2, …, 및 MPM_LIST_N에 포함된 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 존재할 경우, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1, MPM_LIST_2, …, 및 MPM_LIST_N 중 어떤 MPM 리스트에 존재하는지 여부를 나타내는 지시자 MPM_FLAG_1, MPM_FLAG_2, …, 및 MPM_FLAG_N을 엔트로피 부호화할 수 있다. 현재 블록의 화면 내 예측 모드가 MPM_LIST_1에 존재하면, MPM_FLAG_1는 제1 값이고, MPM_FLAG_1을 제외한 MPM_FLAG_2, …, 및 MPM_FLAG_N는 제2 값일 수 있다. 이 경우, 상기 MPM_LIST_1에 대한 색인 정보인 MPM_IDX_1이 추가적으로 엔트로피 부호화될 수 있다. The encoder includes MPM_LIST_1, MPM_LIST_2,... If there are intra prediction modes that are identical to the intra prediction modes of the current block among the intra prediction modes included in, and MPM_LIST_N, the intra prediction modes that are identical to the intra prediction modes of the current block are MPM_LIST_1, MPM_LIST_2,... The indicators MPM_FLAG_1, MPM_FLAG_2,... Indicating which MPM list is among. , And MPM_FLAG_N may be entropy encoded. If the intra prediction mode of the current block exists in MPM_LIST_1, MPM_FLAG_1 is the first value and MPM_FLAG_2,... Except for MPM_FLAG_1. , And MPM_FLAG_N may be the second value. In this case, MPM_IDX_1, which is index information of the MPM_LIST_1, may be additionally entropy encoded.
또는, 현재 블록의 화면내 예측 모드가 MPM_LIST_2에 존재하면, MPM_FLAG_2는 제1 값이고, MPM_FLAG_2를 제외한 MPM_FLAG_1, …, 및 MPM_FLAG_N는 제2 값일 수 있다. 이 경우, 상기 MPM_LIST_2에 대한 색인 정보인 MPM_IDX_2이 추가적으로 엔트로피 부호화될 수 있다. Or, if the intra prediction mode of the current block exists in MPM_LIST_2, MPM_FLAG_2 is the first value and MPM_FLAG_1,... Except for MPM_FLAG_2. , And MPM_FLAG_N may be the second value. In this case, MPM_IDX_2, which is index information of the MPM_LIST_2, may be additionally entropy encoded.
또는, 현재 블록의 화면 내 예측 모드가 MPM_LIST_N에 존재하면, MPM_FLAG_N은 제1 값이고, MPM_FLAG_N을 제외한 MPM_FLAG_1, …, 및 MPM_FLAG_(N-1)은 제2 값일 수 있다. 이 경우, 상기 MPM_LIST_N에 대한 색인 정보인 MPM_IDX_N이 추가적으로 엔트로피 부호화될 수 있다.Or, if the intra prediction mode of the current block exists in MPM_LIST_N, MPM_FLAG_N is the first value and MPM_FLAG_1, except MPM_FLAG_N,... , And MPM_FLAG_ (N-1) may be the second value. In this case, MPM_IDX_N, which is index information of the MPM_LIST_N, may be additionally entropy encoded.
부호화기는, MPM_LIST_1, MPM_LIST_2, …, 및 MPM_LIST_N에 포함된 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 존재하지 않을 경우, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1, MPM_LIST_2, …, 및 MPM_LIST_N 중 어떤 MPM 리스트에 존재하는지 여부를 나타내는 지시자 MPM_FLAG_1, MPM_FLAG_2, …, 및 MPM_FLAG_N을 제2 값으로 엔트로피 부호화할 수 있다. MPM_FLAG_1, MPM_FLAG_2, …, 및 MPM_FLAG_N가 제2 값인 경우, 상기 잔여 화면 내 예측 모드인 REM_MODE가 추가적으로 엔트로피 부호화될 수 있다.The encoder includes MPM_LIST_1, MPM_LIST_2,... If the intra prediction modes identical to the intra prediction modes of the current block do not exist among the intra prediction modes included in, and MPM_LIST_N, the intra prediction modes that are identical to the intra prediction modes of the current block are MPM_LIST_1, MPM_LIST_2,... The indicators MPM_FLAG_1, MPM_FLAG_2,... Indicating which MPM list is among. , And MPM_FLAG_N may be entropy encoded with a second value. MPM_FLAG_1, MPM_FLAG_2,... And, when MPM_FLAG_N is the second value, REM_MODE, which is the prediction mode in the residual picture, may be additionally entropy encoded.
복호화기는, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1, MPM_LIST_2, …, 및 MPM_LIST_N 중 어떤 MPM 리스트에 존재하는지 여부를 나타내는 지시자 MPM_FLAG_1, MPM_FLAG_2, …, 및 MPM_FLAG_N을 엔트로피 복호화할 수 있다. MPM_FLAG_1가 제1 값이고, MPM_FLAG_1을 제외한 MPM_FLAG_2, …, 및 MPM_FLAG_N이 제2 값인 경우, 현재 블록의 화면 내 예측 모드는 MPM_LIST_1에 존재할 수 있다. 이 경우, 상기 MPM_LIST_1에 대한 색인 정보인 MPM_IDX_1이 추가적으로 엔트로피 복호화되어, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. The decoder has the same intra prediction modes as MPM_LIST_1, MPM_LIST_2,... The indicators MPM_FLAG_1, MPM_FLAG_2,... Indicating which MPM list is among. , And MPM_FLAG_N can be entropy decoded. MPM_FLAG_1 is the first value, except for MPM_FLAG_1, MPM_FLAG_2,... If, and MPM_FLAG_N are the second values, the intra prediction mode of the current block may exist in MPM_LIST_1. In this case, MPM_IDX_1, which is index information of the MPM_LIST_1, may be additionally entropy decoded to derive an intra prediction mode of the current block.
또는, MPM_FLAG_2가 제1 값이고 MPM_FLAG_2를 제외한 MPM_FLAG_1, …, 및 MPM_FLAG_N이 제2 값인 경우, 현재 블록의 화면 내 예측 모드는 MPM_LIST_2에 존재할 수 있다. 이 경우, 상기 MPM_LIST_2에 대한 색인 정보인 MPM_IDX_2가 추가적으로 엔트로피 복호화되어, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. Alternatively, MPM_FLAG_2 is the first value and MPM_FLAG_1, except MPM_FLAG_2,... If, and MPM_FLAG_N are the second values, the intra prediction mode of the current block may be present in MPM_LIST_2. In this case, MPM_IDX_2, which is index information of the MPM_LIST_2, may be additionally entropy decoded to derive an intra prediction mode of the current block.
또는, MPM_FLAG_N이 제1 값이고 MPM_FLAG_N를 제외한 MPM_FLAG_1, …, 및 MPM_FLAG_(N-1)이 제2 값인 경우, 현재 블록의 화면 내 예측 모드는 MPM_LIST_N에 존재할 수 있다. 이 경우, 상기 MPM_LIST_N에 대한 색인 정보인 MPM_IDX_N이 추가적으로 엔트로피 복호화되어, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. Or MPM_FLAG_1, where MPM_FLAG_N is the first value and excludes MPM_FLAG_N,... , And MPM_FLAG_ (N-1) are the second values, the intra prediction mode of the current block may be present in MPM_LIST_N. In this case, MPM_IDX_N, which is index information of the MPM_LIST_N, may be additionally entropy decoded to derive an intra prediction mode of the current block.
또는, MPM_FLAG_1, MPM_FLAG_2, …, 및 MPM_FLAG_N이 제2 값인 경우, 상기 잔여 화면 내 예측 모드인 REM_MODE가 추가적으로 엔트로피 복호화되어, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. 이때, MPM_FLAG_1, MPM_FLAG_2, …, 및 MPM_FLAG_N이 모두 제1 값인 경우는 발생하지 않을 수 있다.Or MPM_FLAG_1, MPM_FLAG_2,... If, and MPM_FLAG_N is the second value, REM_MODE, which is the residual intra prediction mode, may be additionally entropy decoded to derive the intra prediction mode of the current block. At this time, MPM_FLAG_1, MPM_FLAG_2,... It may not occur when,, and MPM_FLAG_N are both first values.
이하, 현재 블록에 대해 N개의 MPM 리스트를 사용하는 다른 실시예를 설명한다.Hereinafter, another embodiment of using N MPM lists for the current block will be described.

상기 표 6의 예와 같이, 부호화기는 상기 복수 개의 MPM 리스트들을 구성하는 순서들 중 적어도 하나의 방법에 따라, MPM_LIST_1, MPM_LIST_2, …, MPM_LIST_N의 각각에 포함된 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 존재하는지를 순차적으로 확인함으로써 현재 블록의 화면 내 예측 모드를 엔트로피 부호화할 수 있다. As shown in the example of Table 6, the coder may use the following methods: MPM_LIST_1, MPM_LIST_2,... The intra prediction mode of the current block may be entropy encoded by sequentially checking whether the intra prediction modes identical to the intra prediction modes of the current block are present among the intra prediction modes included in each of the MPM_LIST_N.
예를 들어, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1에 존재하는 경우, MPM_FLAG_1은 제1 값으로 엔트로피 부호화될 수 있다. 이때, 상기 MPM_LIST_1에 대한 색인 정보인 MPM_IDX_1이 추가적으로 엔트로피 부호화될 수 있다.For example, when the same intra prediction mode as the intra prediction mode of the current block exists in the MPM_LIST_1, the MPM_FLAG_1 may be entropy encoded with the first value. In this case, MPM_IDX_1, which is index information of the MPM_LIST_1, may be additionally entropy encoded.
예를 들어, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1에 존재하지 않는 경우, MPM_FLAG_1은 제2 값으로 엔트로피 부호화될 수 있다. 이때, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_2에 존재할 경우(MPM_FLAG_1가 제2 값인 경우), MPM_FLAG_2는 제1 값으로 엔트로피 부호화될 수 있다. 이때, 상기 MPM_LIST_2에 대한 색인 정보인 MPM_IDX_2가 추가적으로 엔트로피 부호화될 수 있다. For example, when the same intra prediction mode as the intra prediction mode of the current block does not exist in the MPM_LIST_1, the MPM_FLAG_1 may be entropy encoded with the second value. In this case, when the same intra prediction mode as the intra prediction mode of the current block exists in the MPM_LIST_2 (where MPM_FLAG_1 is the second value), the MPM_FLAG_2 may be entropy encoded with the first value. In this case, MPM_IDX_2, which is index information of the MPM_LIST_2, may be additionally entropy encoded.
예를 들어, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1, MPM_LIST_2, …, MPM_LIST_(N-1)에 존재하지 않는 경우, MPM_FLAG_1, MPM_FLAG_2, …, MPM_FLAG_(N-1)은 제2 값으로 엔트로피 부호화될 수 있다. 이때, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_N에 존재할 경우(MPM_FLAG_1, MPM_FLAG_2, …, MPM_FLAG_(N-1)가 제2 값인 경우), 상기 MPM_FLAG_N은 제1 값으로 엔트로피 부호화될 수 있다. 이때, 상기 MPM_LIST_N에 대한 색인 정보인 MPM_IDX_N이 추가적으로 엔트로피 부호화될 수 있다.For example, the same intra prediction modes as the intra prediction modes of the current block are set to MPM_LIST_1, MPM_LIST_2,... , MPM_FLAG_1, MPM_FLAG_2, ... if not present in MPM_LIST_ (N-1). , MPM_FLAG_ (N-1) may be entropy encoded with a second value. In this case, when the same intra prediction mode as the intra prediction mode of the current block exists in the MPM_LIST_N (MPM_FLAG_1, MPM_FLAG_2, ..., MPM_FLAG_ (N-1) is the second value), the MPM_FLAG_N is entropy coded to the first value. Can be. In this case, MPM_IDX_N, which is index information of the MPM_LIST_N, may be additionally entropy encoded.
예를 들어, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1, MPM_LIST_2, …, MPM_LIST_N에 존재하지 않는 경우, MPM_FLAG_1, MPM_FLAG_2, …, MPM_FLAG_N은 제2 값으로 엔트로피 부호화될 수 있다. 이때, 상기 잔여 화면 내 예측 모드인 REM_MODE가 추가적으로 엔트로피 부호화될 수 있다.For example, the same intra prediction modes as the intra prediction modes of the current block are set to MPM_LIST_1, MPM_LIST_2,... , MPM_FLAG_1, MPM_FLAG_2,… if not present in MPM_LIST_N. , MPM_FLAG_N may be entropy encoded with a second value. In this case, REM_MODE, which is the prediction mode in the remaining picture, may be additionally entropy encoded.
상기 표 6의 예와 같이, 복호화기는 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_1, MPM_LIST_2, …, MPM_LIST_N 중 어떤 MPM 리스트에 존재하는지 여부를 나타내는 지시자 MPM_FLAG_1, MPM_FLAG_2, …, MPM_FLAG_N 중 적어도 하나 이상을 상기 복수 개의 MPM 리스트를 구성하는 순서들 중 적어도 하나의 방법에 따라 순차적으로 엔트로피 복호화할 수 있다. As shown in the example of Table 6, the decoder has the same intra prediction modes as MPM_LIST_1, MPM_LIST_2,... , The indicators indicating which MPM list among the MPM_LIST_Ns is present in the MPM_FLAG_1, MPM_FLAG_2,... At least one or more of MPM_FLAG_N may be sequentially entropy decoded according to at least one method of orderings of the plurality of MPM lists.
예를 들어, MPM_FLAG_1가 제1 값으로 엔트로피 복호화되는 경우, 현재 블록의 화면 내 예측 모드는 MPM_LIST_1에 존재하며 상기 MPM_LIST_1에 대한 색인 정보인 MPM_IDX_1이 추가적으로 엔트로피 복호화되어, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. For example, when MPM_FLAG_1 is entropy decoded to the first value, the intra prediction mode of the current block is present in MPM_LIST_1 and MPM_IDX_1, which is index information for the MPM_LIST_1, is additionally entropy decoded to derive the intra prediction mode of the current block. can do.
예를 들어, MPM_FLAG_1가 제2 값으로 엔트로피 복호화되는 경우, MPM_FLAG_2가 엔트로피 복호화될 수 있다. 상기 복호화된 MPM_FLAG_2가 제1 값인 경우, 현재 블록의 화면 내 예측 모드는 MPM_LIST_2에 존재하며, 상기 MPM_LIST_2에 대한 색인 정보인 MPM_IDX_2가 추가적으로 엔트로피 복호화되어, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. For example, when MPM_FLAG_1 is entropy decoded to a second value, MPM_FLAG_2 may be entropy decoded. When the decoded MPM_FLAG_2 is the first value, the intra prediction mode of the current block is present in the MPM_LIST_2, and MPM_IDX_2, which is index information of the MPM_LIST_2, is additionally entropy decoded to derive the intra prediction mode of the current block.
예를 들어, MPM_FLAG_1, MPM_FLAG_2, …, MPM_FLAG_(N-1)가 제2 값으로 엔트로피 복호화되는 경우, MPM_FLAG_N이 엔트로피 복호화될 수 있다. 상기 복호화된 MPM_FLAG_N이 제1 값인 경우, 현재 블록의 화면 내 예측 모드는 MPM_LIST_N에 존재하며, 상기 MPM_LIST_N에 대한 색인 정보인 MPM_IDX_N이 추가적으로 엔트로피 복호화되어, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. For example, MPM_FLAG_1, MPM_FLAG_2,... When MPM_FLAG_ (N-1) is entropy decoded to a second value, MPM_FLAG_N may be entropy decoded. When the decoded MPM_FLAG_N is the first value, the intra prediction mode of the current block is present in the MPM_LIST_N, and MPM_IDX_N, which is index information of the MPM_LIST_N, is additionally entropy decoded to derive the intra prediction mode of the current block.
예를 들어, MPM_FLAG_1, MPM_FLAG_2, …, MPM_FLAG_N가 제2 값으로 엔트로피 복호화되는 경우, 상기 잔여 화면 내 예측 모드인 REM_MODE가 추가적으로 엔트로피 복호화되어, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. 이때, MPM_FLAG_1, MPM_FLAG_2, …, MPM_FLAG_N가 제1 값인지 혹은 제2 값인지를 확인하는 단계는 순차적으로 수행될 수 있다. For example, MPM_FLAG_1, MPM_FLAG_2,... When MPM_FLAG_N is entropy decoded to a second value, REM_MODE, which is the residual intra prediction mode, may be additionally entropy decoded to derive the intra prediction mode of the current block. At this time, MPM_FLAG_1, MPM_FLAG_2,... The step of checking whether the MPM_FLAG_N is the first value or the second value may be sequentially performed.
전술한 MPM_FLAG_N와 같이 플래그의 형태로 MPM 리스트를 특정할 수도 있고, 복수의 MPM 리스트 중 어느 하나의 MPM 리스트를 특정하는 인덱스의 형태로 부호화/복호화될 수도 있다. 현재 블록(혹은, 현재 슬라이스, 현재 픽쳐, 현재 시퀀스 등)에서 MPM 기반의 화면 내 예측 모드 유도 방법을 사용하는지 여부에 대한 정보가 부호화/복호화될 수도 있다. 상기 인덱스는 상기 정보에 따라 MPM 기반의 화면 내 예측 모드 유도 방법이 사용되는 경우에 부호화/복호화될 수 있다. 복수의 MPM 리스트에 속하는 MPM 리스트의 개수 또는 종류 중 적어도 하나는 부호화기/복호화기에 기-정의된 고정된 것일 수도 있고, 현재 블록/주변 블록의 크기, 깊이, 형태, 위치 등에 관한 파라미터에 기반하여 가변적으로 결정될 수도 있다. 예를 들어, 부호화기/복호화기에 기-정의된 MPM 리스트의 개수는 1개, 2개, 3개 또는 그 이상의 값일 수 있다. 각 MPM 리스트에 속하는 화면 내 예측 모드의 최대 개수는 서로 동일할 것으로 강제될 수 있다. 이때 최대 개수는 부호화기/복호화기에 기-약속된 고정된 것일 수도 있고, 소정의 단위(예를 들어, 시퀀스, 픽쳐, 슬라이스, 블록 등)에서 시그날링될 수도 있다. 특정 MPM 리스트에 속한 화면 내 예측 모드의 개수가 최대 개수보다 작은 경우, 소정의 모드가 추가될 수 있다. 이때 추가되는 모드는 기-약속된 default mode일 수도 있고, 다른 MPM 리스트에 속한 화면 내 예측 모드일 수도 있다. 다만, 특정 MPM 리스트의 기 포함된 화면 내 예측 모드와 동일하지 않은 모드가 추가될 수 있다. 각 MPM 리스트 간에는 중복성 검사가 생략될 수도 있다. MPM 리스트 중 어느 하나는 다른 하나의 MPM 리스트와 적어도 하나의 동일한 화면 내 예측 모드를 공유할 수도 있다. The MPM list may be specified in the form of a flag as in the above-described MPM_FLAG_N, or may be encoded / decoded in the form of an index for specifying one of the plurality of MPM lists. Information on whether to use the MPM-based intra prediction mode derivation method in the current block (or the current slice, the current picture, the current sequence, etc.) may be encoded / decoded. The index may be encoded / decoded when an MPM-based intra prediction mode derivation method is used according to the information. At least one of the number or types of MPM lists belonging to the plurality of MPM lists may be fixed pre-defined to the encoder / decoder, and may be variable based on parameters related to the size, depth, shape, position, etc. of the current block / peripheral block. It may be determined as. For example, the number of MPM lists pre-defined in the encoder / decoder may be one, two, three or more values. The maximum number of intra prediction modes belonging to each MPM list may be forced to be the same. In this case, the maximum number may be fixed pre-committed to the encoder / decoder, or may be signaled in a predetermined unit (eg, sequence, picture, slice, block, etc.). If the number of intra prediction modes belonging to a specific MPM list is smaller than the maximum number, a predetermined mode may be added. In this case, the added mode may be a pre-appointed default mode or an intra prediction mode belonging to another MPM list. However, a mode that is not the same as the intra prediction mode included in the specific MPM list may be added. The redundancy check may be omitted between each MPM list. Any one of the MPM lists may share at least one same intra prediction mode with another MPM list.
이하, 현재 블록에 대해 N개의 MPM 리스트를 사용하는 또 다른 실시예를 설명한다.Hereinafter, another embodiment of using N MPM lists for the current block will be described.
부호화기는, 상기 복수 개의 MPM 리스트들을 구성하는 순서들 중 적어도 하나의 방법에 따라, MPM_LIST_1부터 MPM_LIST_N까지의 복수 MPM 리스트를 구성할 수 있다. N개의 MPM 리스트들의 총 후보 화면 내 예측 모드들의 개수는 K개일 수 있다. 여기서 N, K는 양의 정수일 수 있다. The encoder may configure a plurality of MPM lists from MPM_LIST_1 to MPM_LIST_N in accordance with at least one method of order of configuring the plurality of MPM lists. The number of prediction modes in the total candidate screen of the N MPM lists may be K. Where N and K may be positive integers.
예를 들어, N개의 MPM 리스트들의 후보 화면 내 예측 모드들 중 K개보다 작거나 같은 후보 화면 내 예측 모드들을 포함하는 MPM_LIST_combined를 구성할 수 있다. For example, MPM_LIST_combined may be configured to include prediction modes in the candidate screen that are less than or equal to K among the prediction modes in the candidate pictures of the N MPM lists.
예를 들어, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_combined에 존재하는 경우, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_combined에 존재하는지 여부를 나타내는 지시자 MPM_FLAG_combined는 제1 값으로 엔트로피 부호화될 수 있다. 이때, 상기 MPM_LIST_combined에 대한 색인 정보인 MPM_IDX_combined가 추가적으로 엔트로피 부호화될 수 있다.For example, if an intra prediction mode identical to the intra prediction mode of the current block exists in MPM_LIST_combined, the indicator MPM_FLAG_combined indicating whether the same intra prediction mode as the intra prediction mode of the current block exists in MPM_LIST_combined is the first parameter. It can be entropy coded as a value. In this case, MPM_IDX_combined, which is index information of the MPM_LIST_combined, may be additionally entropy encoded.
현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_combined에 존재하지 않는 경우, MPM_FLAG_combined는 제2 값으로 엔트로피 부호화될 수 있다. MPM_FLAG_combined가 제2 값인 경우, 상기 잔여 화면 내 예측 모드인 REM_MODE가 추가적으로 엔트로피 부호화될 수 있다.If the same intra prediction mode as the intra prediction mode of the current block does not exist in the MPM_LIST_combined, the MPM_FLAG_combined may be entropy encoded with the second value. When MPM_FLAG_combined is the second value, REM_MODE, which is the prediction mode in the residual picture, may be additionally entropy encoded.
복호화기는, 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 MPM_LIST_combined에 존재하는지 여부를 나타내는 지시자 MPM_FLAG_combined를 엔트로피 복호화할 수 있다. MPM_FLAG_combined가 제1 값인 경우, 상기 색인 정보인 MPM_IDX_combined가 추가적으로 엔트로피 복호화되어, 현재 블록의 화면 내 예측 모드를 유도할 수 있다. MPM_FLAG_combined가 제2 값인 경우, 상기 잔여 화면 내 예측 모드인 REM_MODE가 추가적으로 엔트로피 복호화되어, 현재 블록의 화면 내 예측 모드를 유도할 수 있다.The decoder may entropy decode the indicator MPM_FLAG_combined indicating whether the same intra prediction mode as the intra prediction mode of the current block exists in MPM_LIST_combined. When MPM_FLAG_combined is the first value, the index information MPM_IDX_combined may be additionally entropy decoded to derive an intra prediction mode of the current block. When MPM_FLAG_combined is the second value, REM_MODE, which is the residual intra prediction mode, may be additionally entropy decoded to derive the intra prediction mode of the current block.
본 발명에 따르면, 현재 블록의 화면 내 예측 모드는 부호화/복호화하여 유도될 수 있으며, 이 때, 현재 블록의 화면 내 예측 모드는 주변 블록의 화면 내 예측 모드를 이용하지 않고 엔트로피 부호화/복호화할 수 있다.According to the present invention, the intra prediction mode of the current block may be derived by encoding / decoding. In this case, the intra prediction mode of the current block may be entropy encoded / decoded without using the intra prediction mode of the neighboring block. have.
본 발명에 따르면, 현재 블록의 화면 내 예측 모드를 유도하기 위해, 다른 색 성분의 화면 내 예측 모드를 이용할 수 있다. 예를 들어, 현재 블록이 색차 블록인 경우, 색차 블록에 대한 화면 내 예측 모드를 유도하기 위해, 상기 색차 대상 블록에 대응하는 하나 이상의 휘도 대응 블록의 화면 내 예측 모드를 이용할 수 있다. 이때, 상기 휘도 대응 블록은 상기 색차 블록의 크기, 형태 또는 부호화 파라미터 중 적어도 하나에 기반하여 결정될 수 있다. 또는 상기 휘도 대응 블록은 상기 휘도 블록의 크기, 형태 또는 부호화 파라미터 중 적어도 하나에 기반하여 결정될 수도 있다. According to the present invention, in order to derive an intra prediction mode of a current block, an intra prediction mode of another color component may be used. For example, when the current block is a chrominance block, an intra prediction mode of one or more luminance corresponding blocks corresponding to the chrominance target block may be used to derive an intra prediction mode for the chrominance block. In this case, the luminance corresponding block may be determined based on at least one of a size, a shape, or an encoding parameter of the chrominance block. Alternatively, the luminance corresponding block may be determined based on at least one of a size, a shape, or an encoding parameter of the luminance block.
도 15는 색 성분간 비율이 4:2:0인 경우의 휘도 블록과 색차 블록을 도시한 예시도이다.15 is an exemplary diagram illustrating a luminance block and a color difference block when the ratio between color components is 4: 2: 0.
도 15에 도시된 예에 있어서, 색차 블록에 대응하는 상기 휘도 대응 블록은 A, B, C, D 중 적어도 하나 이상일 수 있다.In the example illustrated in FIG. 15, the luminance corresponding block corresponding to the color difference block may be at least one of A, B, C, and D.
예를 들어, 색차 블록의 (0, 0) 샘플 위치에 대응하는 휘도 블록 A의 화면 내 예측 모드를 색차 블록의 화면 내 예측 모드로 유도할 수 있다. For example, the intra prediction mode of the luminance block A corresponding to the (0, 0) sample position of the chrominance block may be derived into the intra prediction mode of the chrominance block.
예를 들어, 색차 블록의 가운데에 해당하는 (nS/2, nS/2) 샘플 위치에 대응하는 휘도 블록 D의 화면 내 예측 모드를 색차 블록의 화면 내 예측 모드로 유도할 수 있다.For example, the intra prediction mode of the luminance block D corresponding to the (nS / 2, nS / 2) sample position corresponding to the center of the chrominance block may be derived as the intra prediction mode of the chrominance block.
예를 들어, 색차 블록의 크기에 대응하는 휘도 블록 내의 하나 이상의 화면 내 예측 모드의 조합을 이용하여 색차 블록의 화면 내 예측 모드를 유도할 수 있다. 일 예로, 색차 블록의 (0, 0) 샘플 위치와 (nS-1, nS-1) 샘플 위치에 대응하는 휘도 블록 A 와 D의 화면 내 예측 모드의 평균에 해당하는 모드를 색차 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 색차 블록의 크기에 대응하는 휘도 블록 내의 블록 A, B, C, D 의 화면 내 예측 모드의 평균에 해당하는 모드를 색차 블록의 화면 내 예측 모드로 유도할 수 있다. 상기 평균 대신에, 최대값, 최소값, 최빈값, 중간값 및 가중평균값을 포함하는 다양한 통계값 중 하나 이상이 사용될 수 있다For example, an intra prediction mode of the chrominance block may be derived by using a combination of one or more intra prediction modes in the luminance block corresponding to the size of the chrominance block. For example, a mode corresponding to an average of intra prediction modes of luminance blocks A and D corresponding to the (0, 0) sample position of the chrominance block and the (nS-1, nS-1) sample positions is defined in the screen of the chrominance block. Can lead to prediction mode. Alternatively, a mode corresponding to an average of intra prediction modes of blocks A, B, C, and D in the luminance block corresponding to the size of the chrominance block may be derived as the intra prediction mode of the chrominance block. Instead of the mean, one or more of various statistical values may be used, including maximum, minimum, mode, median and weighted average.
예를 들어, 휘도 블록의 크기, 형태 또는 깊이 정보 중 적어도 하나에 기반하여 색차 블록의 화면 내 예측 모드를 유도할 수 있다. 일 예로, 색차 블록의 (0, 0) 샘플 위치와 (nS/2, nS/2) 샘플 위치에 대응하는 휘도 블록 A 와 D의 크기를 비교하여 상대적으로 큰 D의 화면 내 예측 모드를 색차 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 색차 블록의 소정의 위치에 대응하는 휘도 블록의 크기가 색차 블록의 크기보다 크거나 같은 경우에, 해당 휘도 블록의 화면 내 예측 모드를 이용하여 색차 블록의 화면 내 예측 모드를 유도할 수 있다.For example, an intra prediction mode of the color difference block may be derived based on at least one of the size, shape, or depth information of the luminance block. For example, an intra prediction mode of a relatively large D is obtained by comparing the magnitudes of luminance blocks A and D corresponding to (0, 0) sample positions of the chrominance block and (nS / 2, nS / 2) sample positions. Can be derived into the on-screen prediction mode. Alternatively, when the size of the luminance block corresponding to the predetermined position of the chrominance block is greater than or equal to the size of the chrominance block, the intra prediction mode of the chrominance block may be derived by using the intra prediction mode of the corresponding luminance block. .
예를 들어, 색차 블록의 크기, 형태 또는 깊이 정보 중 적어도 하나에 기반하여 색차 블록의 화면 내 예측 모드를 유도할 수 있다. 일 예로, 색차 블록의 크기가 소정의 범위에 해당하는 경우, 색차 블록의 (0, 0) 샘플 위치에 대응하는 휘도 블록의 화면 내 예측 모드를 색차 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 색차 블록의 크기가 소정의 범위에 해당하는 경우, 색차 블록의 (0, 0) 샘플 위치와 (nS/2, nS/2) 샘플 위치에 대응하는 휘도 블록들의 크기를 비교하여 큰 휘도 블록의 화면 내 예측 모드를 색차 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 색차 블록의 형태가 직사각형인 경우, 색차 블록의 가운데에 해당하는 위치에 대응하는 휘도 블록의 화면 내 예측 모드를 색차 블록의 화면 내 예측 모드로 유도할 수 있다.For example, an intra prediction mode of the color difference block may be derived based on at least one of the size, shape, or depth information of the color difference block. For example, when the size of the chrominance block falls within a predetermined range, the intra prediction mode of the luminance block corresponding to the (0, 0) sample position of the chrominance block may be derived into the intra prediction mode of the chrominance block. Alternatively, when the size of the chrominance block falls within a predetermined range, a large luminance block is compared by comparing the sizes of the luminance blocks corresponding to the (0, 0) sample positions of the chrominance block and the (nS / 2, nS / 2) sample positions. Intra-prediction mode of may be derived to the intra-prediction mode of the color difference block. Alternatively, when the shape of the chrominance block is rectangular, the intra prediction mode of the luminance block corresponding to the position corresponding to the center of the chrominance block may be derived as the intra prediction mode of the chrominance block.
예를 들어, 현재 블록이 하위 또는 서브 블록으로 분할되는 경우, 상기 현재 블록에 대한 화면 내 예측 모드를 유도하는 방법 중 적어도 하나 이상을 이용하여 상기 분할된 각각의 서브 블록에 대한 화면 내 예측 모드를 유도할 수 있다. For example, when the current block is divided into lower or sub blocks, the intra prediction mode for each of the divided sub blocks may be obtained by using at least one or more methods of deriving an intra prediction mode for the current block. Can be induced.
상기 현재 블록의 크기 및 서브 블록의 크기는 MxN일 수 있다. M과 N은 동일하거나 또는 상이한 양의 정수일 수 있다. 예를 들어 현재 블록 또는 서브 블록은 CTU, CU, SU(signalling unit), QTMax, QTMin, BTMax, BTMin, 4x4, 8x8, 16x16, 32x32, 64x64, 128x128, 256x256, 4x8, 8x16, 16x8, 32x64, 32x8, 4x32 등 중 적어도 하나일 수 있다. 이때, QTMax 및 QTMin은 각각 쿼트트리로 분할할 수 있는 최대 및 최소의 크기를 나타낼 수 있으며, BTMax 및 BTMin은 이진트리로 분할할 수 있는 최대 및 최소 크기를 나타낼 수 있다. 이하 서브 블록의 크기는 서브 블록의 분할 구조를 의미할 수 있다.The size of the current block and the size of the sub block may be M × N. M and N may be the same or different positive integers. For example, the current block or subblock is CTU, CU, SU (signalling unit), QTMax, QTMin, BTMax, BTMin, 4x4, 8x8, 16x16, 32x32, 64x64, 128x128, 256x256, 4x8, 8x16, 16x8, 32x64, 32x8 , 4x32 and the like. In this case, QTMax and QTMin may represent the maximum and minimum sizes that can be split into a quart tree, respectively, and BTMax and BTMin may represent the maximum and minimum sizes that can be split into a binary tree. Hereinafter, the size of the sub block may mean a partition structure of the sub block.
상기 서브 블록의 크기는 상기 현재 블록의 크기에 따라 달라질 수 있다. 예를 들어, 현재 블록의 가로 및 세로 크기의 N 등분에 해당하는 크기가 서브 블록의 크기일 수 있다. 이때, N은 양의 정수일 수 있으며 2, 4, 8, 16, 32, 64 중 적어도 하나일 수 있다. 예를 들어, 현재 블록의 크기가 32x32 이고 가로, 세로 각각에 대한 등분 N이 4인 경우, 서브 블록의 크기는 8x8일 수 있다.The size of the sub block may vary depending on the size of the current block. For example, the size corresponding to N equal to the horizontal and vertical sizes of the current block may be the size of the sub block. In this case, N may be a positive integer and may be at least one of 2, 4, 8, 16, 32, and 64. For example, when the size of the current block is 32x32 and the equal N for each of the horizontal and the vertical is 4, the size of the subblock may be 8x8.
또는, 상기 서브 블록의 크기는 상기 현재 블록의 크기에 관계없이 소정의 고정된 크기일 수 있다. 예를 들어, 서브 블록의 크기는 현재 블록의 크기에 관계없이 최소 크기일 수 있으며, 예를 들어 4x4일 수 있다.Alternatively, the size of the sub block may be a predetermined fixed size regardless of the size of the current block. For example, the size of the sub block may be the minimum size regardless of the size of the current block, for example, 4x4.
또는, 상기 서브 블록의 크기는 상기 현재 블록의 주변 블록의 분할 구조에 기반하여 결정될 수 있다. 예를 들어, 인접한 주변 블록이 분할된 경우에 현재 블록을 분할하여 서브 블록의 크기가 결정될 수 있다.Alternatively, the size of the sub block may be determined based on the partition structure of the neighboring block of the current block. For example, when adjacent neighboring blocks are divided, the size of the sub block may be determined by dividing the current block.
상기 서브 블록의 크기는 상기 현재 블록의 주변 블록의 화면 내 예측 모드에 기반하여 결정될 수 있다. 예를 들어, 주변 블록의 화면 내 예측 모드가 상이한 경계를 기준으로 서브 블록을 분할하여 서브 블록의 크기가 결정될 수 있다. The size of the sub block may be determined based on an intra prediction mode of a neighboring block of the current block. For example, the size of the sub block may be determined by dividing the sub block based on a boundary where the intra prediction mode of the neighboring block is different.
상기 서브 블록의 크기는 주변 블록의 부호화 파라미터에 기반하여 결정될 수 있다. 예를 들어, 주변 블록이 화면 내 부호화 블록인지 화면 간 부호화 블록인지에 기반하여 서브 블록을 분할하여 결정할 수 있다. The size of the sub block may be determined based on encoding parameters of neighboring blocks. For example, the sub-block may be divided and determined based on whether the neighboring block is an intra coded block or an inter coded block.
상기 현재 블록의 크기, 서브 블록의 크기, 현재 블록에 대한 N 등분 값 중 적어도 하나 이상은 소정의 크기로 고정될 수 있다. At least one or more of the size of the current block, the size of the sub block, and an N equal value for the current block may be fixed to a predetermined size.
예를 들어, 상기 현재 블록의 고정된 소정의 크기가 16x16인 경우, 현재 블록의 크기가 16x16이면 현재 블록은 서브 블록으로 분할되고 각각의 서브 블록에 대한 화면 내 예측 모드를 유도할 수 있다. For example, when the fixed predetermined size of the current block is 16x16, if the size of the current block is 16x16, the current block may be divided into sub-blocks and induce an intra prediction mode for each sub-block.
예를 들어, 상기 현재 블록의 고정된 소정의 크기가 CTU이고 상기 N 등분 값이 4인 경우, 현재 블록의 크기가 CTU이면 CTU의 가로 및 세로를 4등분한 서브 블록 단위로 화면 내 예측 모드를 유도할 수 있다.For example, when the fixed predetermined size of the current block is CTU and the N equal value is 4, if the size of the current block is CTU, the intra prediction mode is performed in units of sub-blocks divided into 4 equal parts by the width and length of the CTU. Can be induced.
상기 하나 이상의 서브 블록은 더 작은 크기의 블록들로 분할될 수 있다. 예를 들어, 상기 현재 블록의 크기가 32x32이고 서브 블록의 크기가 16x16인 경우, 하나 이상의 서브 블록은 8x8, 4x4, 16x8, 4x16 등의 더 작은 블록들로 분할될 수 있다.The one or more sub blocks may be divided into blocks of smaller size. For example, when the size of the current block is 32x32 and the size of the subblock is 16x16, one or more subblocks may be divided into smaller blocks such as 8x8, 4x4, 16x8, 4x16, and the like.
상기 현재 블록의 크기, 서브 블록의 크기, 현재 블록에 대한 N 등분 값 중 적어도 하나 이상은 부/복호화될 수 있다.At least one or more of the size of the current block, the size of the sub block, and an N equal value for the current block may be encoded / decoded.
상기 현재 블록에 대한 서브 블록의 분할 구조는 부/복호화될 수 있다. 이때, 상기 분할된 서브 블록은 다양한 크기 및/또는 형태를 가질 수 있다. 또한, 각 서브 블록에 대해 화면 내 예측 모드를 유도할 수 있다.The partition structure of the sub block with respect to the current block may be encoded / decoded. In this case, the divided subblocks may have various sizes and / or shapes. In addition, an intra prediction mode may be derived for each sub block.
현재 블록의 화면 내 예측 모드가 주변 블록의 화면 내 예측 모드를 이용하여 유도됨을 나타내는 지시자(예컨대, 플래그)가 부/복호화될 수 있다. 예를 들어, 상기 지시자는 NDIP_flag (Neighbouring mode Dependant Intra Prediction)일 수 있다. 상기 지시자는 현재 블록 또는 서브 블록 중 적어도 하나의 단위마다 부/복호화될 수 있다. 상기 지시자는 현재 블록 또는 서브 블록의 크기가 소정의 크기 또는 소정의 크기 범위에 해당하는 경우에만 부/복호화될 수 있다. 상기 소정의 크기는 예컨대, 64x64 또는 BTMax일 수 있다. 전술한 바와 같이, 현재 블록은 복수의 서브 블록들로 분할될 수 있다. 서브 블록의 분할 구조는 기정의 되거나 부/복호화에 의해 결정될 수 있다.An indicator (eg, a flag) indicating that the intra prediction mode of the current block is derived using the intra prediction mode of the neighboring block may be encoded / decoded. For example, the indicator may be Neighboring mode dependent intra prediction (NDIP_flag). The indicator may be encoded / decoded for at least one unit of the current block or subblock. The indicator may be encoded / decoded only when the size of the current block or sub block corresponds to a predetermined size or a predetermined size range. The predetermined size may be 64x64 or BTMax, for example. As described above, the current block may be divided into a plurality of sub blocks. The partition structure of the subblock may be predefined or determined by encoding / decoding.
현재 블록에 대한 NDIP_flag 가 1인 경우, 현재 블록 또는 현재 블록 내의 각 서브 블록에 대한 화면 내 예측 모드는 주변 블록의 화면 내 예측 모드를 이용하여 유도될 수 있다. 이 경우, 현재 블록 및/또는 서브 블록에 대한 prev_intra_luma_pred_flag, mpm_idx, rem_intra_luma_pred_mode, intra_chroma_pred_mode, split_flag, QB_flag, quadtree_flag, binarytree_flag, Btype_flag 중 적어도 하나 이상의 정보는 부/복호화되지 않을 수 있다. When NDIP_flag for the current block is 1, the intra prediction mode for the current block or each sub block within the current block may be derived using the intra prediction mode of the neighboring block. In this case, at least one or more of prev_intra_luma_pred_flag, mpm_idx, rem_intra_luma_pred_mode, intra_chroma_pred_mode, split_flag, QB_flag, quadtree_flag, binarytree_flag, and Btype_flag of the current block and / or subblock may not be encoded or decoded.
예를 들어, 현재 블록에 대한 NDIP_flag 가 1인 경우, 현재 블록에 대한 화면 내 예측 모드를 복호화한 후, 상기 복호화한 화면 내 예측 모드와 주변 블록의 화면 내 예측 모드를 이용하여 각 서브 블록에 대한 화면 내 예측 모드를 유도할 수 있다. 이때, 서브 블록에 대한 prev_intra_luma_pred_flag, mpm_idx, rem_intra_luma_pred_mode, intra_chroma_pred_mode, split_flag, QB_flag, quadtree_flag, binarytree_flag, Btype_flag 중 적어도 하나 이상의 정보는 부/복호화되지 않을 수 있다. For example, when the NDIP_flag of the current block is 1, after decoding the intra prediction mode for the current block, the decoded intra prediction mode and the intra prediction mode of the neighboring block are used for each sub block. Intra prediction mode can be derived. In this case, at least one or more of prev_intra_luma_pred_flag, mpm_idx, rem_intra_luma_pred_mode, intra_chroma_pred_mode, split_flag, QB_flag, quadtree_flag, binarytree_flag, and Btype_flag of the subblock may not be encoded / decoded.
현재 블록에 대한 NDIP_flag 가 0인 경우, 현재 블록 또는 서브 블록의 화면 내 예측 모드 및 서브 블록의 분할 정보 중 적어도 하나 이상에 관련된 정보가 부/복호화될 수 있다.When the NDIP_flag of the current block is 0, information related to at least one or more of the intra prediction mode of the current block or the sub-block and the split information of the sub-block may be encoded / decoded.
현재 블록 내의 서브 블록들 중 제1 서브 블록에 대한 화면 내 예측 모드는 나머지 서브 블록들과 다른 방법으로 유도될 수 있다. 제1 서브 블록은 현재 블록 내의 복수의 서브 블록들 중 하나일 수 있다. 예컨대, 제1 서브 블록은 Z 스캔 순서 상 첫번째 서브 블록일 수 있다. The intra prediction mode for the first sub block among the sub blocks in the current block may be derived in a manner different from the remaining sub blocks. The first sub block may be one of a plurality of sub blocks in the current block. For example, the first sub block may be the first sub block in the Z scan order.
제1 서브 블록의 화면 내 예측 모드는 초기(initial) 모드를 의미할 수 있다. 예를 들어, 서브 블록에 대한 화면 내 예측 모드를 각 서브 블록의 왼쪽과 위쪽 블록의 화면 내 예측 모드의 평균으로 유도하는 경우, 상기 초기 모드는 다른 방법으로 유도될 수 있다. 상기 초기 모드를 유도하기 위한 다른 방법은 본 발명에 따른 화면 내 예측 모드를 유도하는 방법 중 적어도 하나일 수 있다. The intra prediction mode of the first subblock may mean an initial mode. For example, when the intra prediction mode for the sub block is derived as an average of the intra prediction modes of the left and upper blocks of each sub block, the initial mode may be derived in another way. Another method for deriving the initial mode may be at least one of a method of deriving an intra prediction mode according to the present invention.
예를 들어, MPM 리스트의 N번째(예컨대, 첫번째)에 존재하는 모드를 상기 초기 모드로 유도할 수 있다. 또는, 현재 블록 주변에 존재하는 하나 이상의 블록의 화면 내 예측 모드 중 가장 많이 발생하는 모드를 상기 초기 모드로 유도할 수 있다. 또는, 상기 현재 블록에 대해서 부/복호화한 화면 내 예측 모드를 상기 초기 모드로 유도할 수 있다. 또는, 상기 제1 서브 블록에 대해서 부/복호화한 화면 내 예측 모드를 상기 초기 모드로 유도할 수 있다.For example, a mode existing in the Nth (eg, first) of the MPM list may be derived as the initial mode. Alternatively, a mode that most frequently occurs among intra prediction modes of one or more blocks existing around the current block may be derived as the initial mode. Alternatively, the intra prediction mode encoded / decoded with respect to the current block may be derived as the initial mode. Alternatively, the intra prediction mode encoded / decoded with respect to the first subblock may be derived as the initial mode.
현재 블록 내의 서브 블록에 대한 화면 내 예측 모드를 유도함에 있어 임의의 순서로 하나 이상의 서브 블록의 화면 내 예측 모드를 유도할 수 있다. 이때, 상기 임의의 순서는 스캐닝 순서일 수 있으며 래스터 스캔, 업라이트 스캔, 수직 스캔, 수평 스캔, 대각 스캔, 지그재그 스캔 중 적어도 하나에 해당할 수 있다. 상기 스캐닝 순서에 따라 화면 내 예측 모드를 유도하는 서브 블록의 개수는 1개 이상일 수 있다. 상기 임의의 순서는 주변 블록의 화면 내 예측 모드에 따라 적응적으로 결정될 수 있다.In deriving an intra prediction mode for a sub block in a current block, an intra prediction mode of one or more sub blocks may be derived in any order. In this case, the random order may be a scanning order and may correspond to at least one of raster scan, upright scan, vertical scan, horizontal scan, diagonal scan, and zigzag scan. The number of subblocks for inducing the intra prediction mode according to the scanning order may be one or more. The random order may be adaptively determined according to the intra prediction mode of the neighboring block.
도 16은 현재 블록이 하나 이상의 서브 블록으로 분할되어 각 서브 블록의 화면 내 예측 모드를 유도하는 실시예를 설명하기 위한 도면이다. FIG. 16 is a diagram for describing an embodiment in which a current block is divided into one or more subblocks to derive an intra prediction mode of each subblock.
먼저, 현재 블록의 크기가 소정의 크기에 해당하는지 판단할 수 있다(S1610). 상기 소정의 크기는 현재 블록의 가로 또는 세로의 길이에 의해서 정해질 수 있다. 예컨대, 현재 블록의 가로 또는 세로의 길이가 서브 블록으로 분할 가능한 길이인지 여부에 따라 단계 S1610의 판단이 수행될 수 있다.First, it may be determined whether the size of the current block corresponds to a predetermined size (S1610). The predetermined size may be determined by the width or length of the current block. For example, the determination of step S1610 may be performed according to whether the length of the current block is the length that can be divided into sub-blocks.
예를 들어, 현재 블록의 가로의 길이와 세로의 길이가 서로 같은 정사각형인 경우, 가로 및 세로 길이의 각각을 N 등분한 길이가 임의의 길이보다 크거나 같은 경우에 상기 현재 블록의 크기가 상기 소정의 크기에 해당할 수 있다. 예를 들어, 상기 N은 4이고 임의의 길이가 4인 경우, 상기 현재 블록이 256x256, 128x128, 64x64, 32x32, 16x16 중 적어도 하나이면, 상기 현재 블록의 크기는 상기 소정의 크기에 해당할 수 있다.For example, in the case where the horizontal length and the vertical length of the current block are equal to each other, the size of the current block is greater than or equal to the predetermined length when N equal lengths of each of the horizontal and vertical lengths are greater than or equal to a predetermined length. It may correspond to the size of. For example, when N is 4 and the arbitrary length is 4, if the current block is at least one of 256x256, 128x128, 64x64, 32x32, and 16x16, the size of the current block may correspond to the predetermined size. .
예를 들어, 현재 블록의 가로의 길이와 세로의 길이가 서로 다른 직사각형의 경우, 가로 및 세로 중 큰 길이를 M 등분한 길이와 작은 길이를 N등분한 길이 중 작은 길이가 임의의 길이보다 크거나 같은 경우에 상기 현재 블록의 크기가 상기 소정의 크기에 해당할 수 있다. 예를 들어, 상기 M은 4이고 N은 2이며 임의의 길이가 4인 경우, 상기 현재 블록이 128x64, 64x128, 128x32, 32x128, 128x16, 16x128, 128x8, 8x128, 64x32, 32x64, 64x16, 16x64, 64x8, 8x64, 32x16, 16x32, 32x8, 8x32, 16x8, 8x16 중 적어도 하나이면, 상기 현재 블록의 크기는 상기 소정의 크기에 해당할 수 있다.For example, in the case of a rectangle having different lengths and widths of the current block, the smaller length of M equal to the larger length of the width and length and the N equal to the smaller length is greater than the arbitrary length. In the same case, the size of the current block may correspond to the predetermined size. For example, if M is 4, N is 2, and any length is 4, the current block is 128x64, 64x128, 128x32, 32x128, 128x16, 16x128, 128x8, 8x128, 64x32, 32x64, 64x16, 16x64, 64x8 If at least one of 8x64, 32x16, 16x32, 32x8, 8x32, 16x8, and 8x16, the size of the current block may correspond to the predetermined size.
예를 들어, 상기 현재 블록이 더 이상 분할되지 않을 경우, 상기 현재 블록의 크기는 상기 소정의 크기에 해당할 수 있다. 예를 들어, 현재 블록에 대한 분할 정보, 쿼드트리 및/또는 이진트리 분할 정보가 0으로서, 현재 블록이 분할되지 않는 것을 나타내고 현재 블록의 가로 또는 세로의 길이가 최소 길이보다 큰 경우, 상기 현재 블록의 크기는 소정의 크기에 해당할 수 있다. 이때 상기 최소 길이는 4일 수 있다.For example, when the current block is no longer divided, the size of the current block may correspond to the predetermined size. For example, if the partition information for the current block, quadtree and / or binary tree partitioning information is 0, indicating that the current block is not divided, and the horizontal or vertical length of the current block is greater than the minimum length, the current block. The size of may correspond to a predetermined size. In this case, the minimum length may be four.
상기 현재 블록의 크기가 소정의 크기에 해당하지 않는 경우(S1610에서 No), 현재 블록에 대한 분할 정보 및 화면 내 예측 모드를 복호화할 수 있다(S1660). 현재 블록이 분할되지 않는 경우에는 현재 블록에 대한 화면 내 예측 모드를 복호화할 수 있다. 현재 블록이 분할되는 경우에는 각 분할된 서브 블록에 대한 화면 내 예측 모드를 복호화할 수 있다.When the size of the current block does not correspond to a predetermined size (No in S1610), the split information about the current block and the intra prediction mode may be decoded (S1660). If the current block is not divided, the intra prediction mode for the current block may be decoded. When the current block is split, the intra prediction mode for each split subblock may be decoded.
상기 현재 블록의 크기가 소정의 크기에 해당하는 경우(S1610에서 Yes), NDIP_flag를 복호화할 수 있다(S1620). 다음 단계에서, 복호화된 NDIP_flag 값이 체크될 수 있다(S1630).If the size of the current block corresponds to a predetermined size (Yes in S1610), NDIP_flag may be decoded (S1620). In a next step, the decoded NDIP_flag value may be checked (S1630).
NDIP_flag가 0인 경우(S1630에서 No), 전술한 바와 같이 현재 블록에 대한 분할 정보, 현재 블록의 화면 내 예측 모드, 서브 블록의 화면 내 예측 모드 중 적어도 하나 이상을 복호화할 수 있다(S1660).When NDIP_flag is 0 (No in S1630), as described above, at least one or more of split information about the current block, intra prediction mode of the current block, and intra prediction mode of the subblock may be decoded (S1660).
NDIP_flag가 1인 경우(S1630에서 Yes), 현재 블록을 서브 블록으로 분할할 수 있다(S1640). 이때, 서브 블록은 기정의된 소정의 크기 및/또는 형태로 분할될 수 있다. 또는 복호화된 분할 정보에 기초하여 분할될 수 있다.If NDIP_flag is 1 (Yes in S1630), the current block may be divided into subblocks (S1640). In this case, the sub block may be divided into a predetermined size and / or shape. Or it may be divided based on the decoded partition information.
다음 단계에서, 현재 블록을 분할하여 생성된 서브 블록의 화면 내 예측 모드가 유도될 수 있다(S1650). 블록의 화면 내 예측 모드는 주변 블록의 화면 내 예측 모드에 기초하여 유도될 수 있다. 또는, 현재 블록의 화면 내 예측 모드를 복호화하여 이용할 수 있다.In a next step, an intra prediction mode of a sub block generated by dividing a current block may be derived (S1650). The intra prediction mode of the block may be derived based on the intra prediction mode of the neighboring block. Alternatively, the intra prediction mode of the current block may be decoded and used.
상기 현재 블록 또는 서브 블록에 대하여 상기 유도된 화면 내 예측 모드를 이용하여 화면 내 예측을 수행할 수 있다(S1670).Intra-prediction may be performed on the current block or sub-block using the derived intra-prediction mode (S1670).
도 17은 현재 블록이 서브 블록으로 분할되는 하나의 실시예를 도시한 도면이다.FIG. 17 is a diagram illustrating an embodiment in which a current block is divided into sub blocks.
현재 블록 내의 복수의 서브 블록들의 화면 내 예측 모드를 유도하는 순서는 현재 블록 기준의 래스터(raster) 스캔 순서일 수 있다. 또는, 소정의 블록 크기 기준의 래스터 스캔 순서일 수 있다. 예를 들어, C1, C2, C3, …, C16 순서로 서브 블록들의 화면 내 예측 모드가 유도될 수 있다. 또는, C1, C2, C5, C6, C3, C4, …, C12, C15, C16 순서로 유도될 수 있다. 또는 각 서브 블록의 화면 내 예측 모드를 병렬적으로 유도할 수 있다. 각각의 서브 블록들에 대한 화면 내 예측 모드는 상기 현재 블록의 화면 내 예측 모드를 유도하는 방법 중 적어도 하나 이상의 방법으로 유도될 수 있다. The order of deriving an intra prediction mode of the plurality of sub-blocks in the current block may be a raster scan order based on the current block. Or, it may be a raster scan order based on a predetermined block size. For example, C1, C2, C3,... , An intra prediction mode of the sub blocks may be derived in a C16 order. Or C1, C2, C5, C6, C3, C4,... , C12, C15, C16 may be derived in the order. Alternatively, the intra prediction mode of each subblock may be derived in parallel. The intra prediction mode for each of the sub-blocks may be derived by at least one or more methods of deriving the intra prediction mode of the current block.
예를 들어, 상기 현재 블록이 서브 블록으로 분할되어 서브 블록 각각에 대한 화면 내 예측 모드를 유도하는 경우, 주변 블록의 화면 내 예측 모드가 이용될 수 있다. For example, when the current block is divided into subblocks to derive an intra prediction mode for each sub block, an intra prediction mode of neighboring blocks may be used.
예를 들어, 각 서브 블록의 (0, 0) 위치 샘플의 좌측과 상단에 위치한 블록의 화면 내 예측 모드의 통계값을 각 서브 블록의 화면 내 예측 모드로 유도할 수 있다. 예를 들어, 상기 통계값이 평균 값일 경우, 도 17에 도시된 각각의 서브 블록의 화면 내 예측 모드는 아래의 수학식 4를 이용하여 유도될 수 있다.For example, the statistical value of the intra prediction mode of the block located at the left and the top of the (0, 0) position sample of each sub block may be derived to the intra prediction mode of each sub block. For example, when the statistical value is an average value, the intra prediction mode of each sub block illustrated in FIG. 17 may be derived using Equation 4 below.
또는, 각 서브 블록의 (0, 0) 위치 샘플의 좌측과 상단에 위치한 블록의 크기를 비교하여 큰 블록의 화면 내 예측 모드를 서브 블록의 화면 내 예측 모드로 유도할 수 있다. 이때, 두 블록의 크기가 같은 경우에는 좌측과 상단 블록의 화면 내 예측 모드의 평균 값을 각 서브 블록의 화면 내 예측 모드로 유도할 수 있다. Alternatively, the intra prediction mode of the large block may be derived into the intra prediction mode of the sub block by comparing the sizes of the blocks located at the left and the top of the (0, 0) position sample of each sub block. In this case, when the sizes of the two blocks are the same, an average value of the intra prediction modes of the left and the upper blocks may be derived into the intra prediction mode of each sub block.
또는, 각 서브 블록의 (0, 0) 위치 샘플의 좌측과 상단에 위치한 블록의 화면 내 예측 모드의 크기를 비교하여 둘 중 작은 값을 갖는 모드를 서브 블록의 화면 내 예측 모드로 유도할 수 있다. 두 모드의 값이 같은 경우는 둘 중 하나의 모드를 서브 블록의 화면 내 예측 모드로 유도할 수 있다.Alternatively, the mode having the smaller value may be derived as the intra prediction mode of the sub-block by comparing the magnitudes of the intra prediction modes of the block located on the left and the top of the (0, 0) position sample of each sub block. . When the values of the two modes are the same, one of the two modes may be derived as the intra prediction mode of the subblock.
또는, 현재 블록의 주변에 있는 화면 내 예측 모드를 이용하여 각 서브 블록의 화면 내 예측 모드를 유도할 수 있다. 이때, 각 서브 블록의 (0, 0) 샘플 위치에서 좌측 및/또는 상단에 위치한 현재 블록의 하나 이상의 주변 블록의 화면 내 예측 모드를 이용할 수 있다. 예를 들어, 도 17에 도시된 각각의 서브 블록의 화면 내 예측 모드는 아래의 수학식 5를 이용하여 유도될 수 있다.Alternatively, the intra prediction mode of each subblock may be derived using the intra prediction mode around the current block. In this case, an intra prediction mode of at least one neighboring block of the current block located at the left and / or the top of the (0, 0) sample position of each sub block may be used. For example, the intra prediction mode of each sub block illustrated in FIG. 17 may be derived using Equation 5 below.

또는, 현재 블록의 주변 블록의 화면 내 예측 모드가 모두 비방향성 모드인 경우, 서브 블록의 화면 내 예측 모드는 비방향성 모드(예컨대, DC 모드 및 Planar 모드) 중 적어도 하나로 유도될 수 있다.Alternatively, when the intra prediction modes of the neighboring blocks of the current block are all non-directional modes, the intra prediction modes of the sub-blocks may be derived into at least one of the non-directional modes (eg, the DC mode and the planar mode).
도 18은 현재 블록이 서브 블록으로 분할되는 다른 실시예를 도시한 도면이다.18 illustrates another embodiment in which a current block is divided into sub blocks.
도 18에 도시된 바와 같이, 현재 블록 내의 서브 블록은 다양한 크기 및/또는 형태를 가질 수 있다. 상기 현재 블록 및/또는 서브 블록의 분할 구조 및/또는 크기는 부/복호화하여 결정될 수 있다. 이때, 각 서브 블록에 대한 화면 내 예측 모드는 전술한 현재 블록 또는 서브 블록의 화면 내 예측 모드를 유도하는 방법 중 적어도 하나 이상의 방법으로 유도될 수 있다.As shown in FIG. 18, the sub blocks in the current block may have various sizes and / or shapes. The partition structure and / or size of the current block and / or sub-block may be determined by encoding / decoding. In this case, the intra prediction mode for each sub block may be derived by at least one or more of the above-described methods of deriving the intra prediction mode of the current block or sub blocks.
예를 들어, 각 서브 블록의 (0, 0) 위치 샘플의 왼쪽과 위쪽에 위치한 블록의 화면 내 예측 모드의 통계값을 각 서브 블록의 화면 내 예측 모드로 유도할 수 있다. 예를 들어, 상기 통계값이 평균 값일 경우, 도 18에 도시된 서브 블록의 화면 내 예측 모드는 아래의 수학식 6을 이용하여 유도될 수 있다.For example, the statistical value of the intra prediction mode of the block located on the left and the top of the (0, 0) position sample of each sub block may be derived to the intra prediction mode of each sub block. For example, when the statistical value is an average value, the intra prediction mode of the sub block illustrated in FIG. 18 may be derived using Equation 6 below.

또는, 각 서브 블록에 인접한 하나 이상의 주변 블록의 화면 내 예측 모드의 통계값을 각 서브 블록의 화면 내 예측 모드로 유도할 수 있다. 예를 들어, 상기 통계값이 평균 값일 경우, 도 18에 도시된 각각의 서브 블록의 화면 내 예측 모드는 아래의 수학식 7을 이용하여 유도될 수 있다.Alternatively, the statistical value of the intra prediction mode of at least one neighboring block adjacent to each sub block may be derived to the intra prediction mode of each sub block. For example, when the statistical value is an average value, the intra prediction mode of each sub block illustrated in FIG. 18 may be derived using Equation 7 below.

또는, 현재 블록의 주변 블록의 화면 내 예측 모드가 모두 비방향성 모드인 경우 서브 블록의 화면 내 예측 모드는 비방향성 모드(예컨대, DC 모드 및 Planar 모드) 중 적어도 하나로 유도될 수 있다.Alternatively, when the intra prediction modes of the neighboring blocks of the current block are all non-directional modes, the intra prediction modes of the sub-blocks may be derived into at least one of non-directional modes (eg, DC mode and planar mode).
상기 현재 블록이 서브 블록으로 분할되어 서브 블록 각각에 대한 화면 내 예측 모드를 유도하는 경우, MPM을 이용하여 상기 현재 블록에 대한 화면 내 예측 모드를 유도한 후, 상기 유도된 모드와 주변 블록의 화면 내 예측 모드를 이용하여 각 서브 블록의 화면 내 예측 모드를 유도할 수 있다. 이때, 상기 MPM을 이용하여 유도한 현재 블록의 화면 내 예측 모드와 주변 블록의 화면 내 예측 모드 중 적어도 하나 이상을 이용하여, 현재 블록의 화면 내 예측 모드를 유도하는 방법 중 적어도 하나의 방법으로 서브 블록의 화면 내 예측 모드를 유도할 수 있다. 예를 들어, 상기 MPM을 이용하여 유도한 현재 블록의 화면 내 예측 모드가 Pred_mpm인 경우, 서브 블록의 화면 내 예측 모드는 다음과 같이 유도될 수 있다. When the current block is divided into sub-blocks to derive an intra prediction mode for each sub block, the MPM is used to derive an intra prediction mode for the current block, and then the derived mode and the screen of the neighboring block. The intra prediction mode of each subblock may be derived using the intra prediction mode. In this case, by using at least one of the intra prediction mode of the current block derived from the MPM and the intra prediction mode of the neighboring block, the sub mode is derived by at least one of the methods of deriving the intra prediction mode of the current block. Intra prediction mode of a block can be derived. For example, when the intra prediction mode of the current block derived using the MPM is Pred_mpm, the intra prediction mode of the sub block may be derived as follows.
예를 들어, 각 서브 블록의 (0, 0) 위치 샘플의 좌측과 상단에 위치한 블록의 화면 내 예측 모드의 평균 값과 상기 Pred_mpm의 크기를 비교하여 상기 평균 값이 Pred_mpm 보다 큰 경우 Pred_mpm + 1, Pred_mpm 보다 작은 경우 Pred_mpm - 1을 서브 블록의 화면 내 예측 모드로 유도할 수 있다. 또는, 각 서브 블록의 (0, 0) 위치 샘플의 좌측과 상단에 위치한 블록의 화면 내 예측 모드와 상기 Pred_mpm의 평균 값을 화면 내 예측 모드로 유도할 수 있다. 또는, 각 서브 블록의 (0, 0) 위치 샘플의 좌측 또는 상단에 위치한 블록의 화면 내 예측 모드와 상기 Pred_mpm의 크기를 비교하여 Pred_mpm을 조정하여 화면 내 예측 모드를 유도할 수 있다. 이때, 상기 평균 값 대신, 전술한 통계 값 중 적어도 하나가 이용될 수 있다.For example, if the average value is greater than Pred_mpm by comparing the average value of the intra prediction mode of the block located on the left and top of the (0, 0) position samples of each sub-block, the Pred_mpm + 1, If less than Pred_mpm, Pred_mpm-1 may be derived to the intra prediction mode of the subblock. Alternatively, the intra prediction mode and the average value of the Pred_mpm of the blocks located at the left and the top of the (0, 0) position samples of each sub block may be derived to the intra prediction mode. Alternatively, the intra prediction mode may be derived by adjusting the Pred_mpm by comparing the intra prediction mode of the block located at the left or top of the (0, 0) position sample of each sub block with the size of the Pred_mpm. In this case, at least one of the aforementioned statistical values may be used instead of the average value.
도 19는 현재 블록이 서브 블록으로 분할되는 또 다른 실시예를 도시한 도면이다.19 illustrates another embodiment in which a current block is divided into subblocks.
도 19에 있어서, 각 블록 내의 숫자는 해당 블록의 화면 내 예측 모드의 번호를 의미한다. 또한, Cx(x는 1 .. 16)는 현재 블록 내의 x번째 서브 블록을 의미한다. 또한, 화살표는 해당 블록의 화면 내 예측 방향 또는 각도를 의미한다. In FIG. 19, the number in each block means the number of intra prediction modes of the block. In addition, Cx (x is 1 .. 16) means the x-th sub-block in the current block. In addition, an arrow means an intra prediction direction or an angle of the block.
예를 들어, 각 서브 블록의 (0, 0) 위치 샘플의 왼쪽과 위쪽에 위치한 블록의 화면 내 예측 모드의 통계 값을 각 서브 블록의 화면 내 예측 모드로 유도할 수 있다. 상기 통계 값은, 예를 들어, 평균 값일 수 있다. 또는, 상기 주변 블록의 화면 내 예측 모드 중 적어도 하나의 모드가 비방향성 모드인 경우 상기 주변 블록의 화면 내 예측 모드 중 방향성 모드로 서브 블록의 화면 내 예측 모드를 유도할 수 있다. 비방향성 모드는 예컨대, Planar 모드(모드 번호 0) 및 DC 모드(모드 번호 1)를 포함할 수 있다. 예를 들어, 도 19에 도시된 각각의 서브 블록의 화면 내 예측 모드는 아래의 수학식 8을 이용하여 유도될 수 있다. For example, the statistical value of the intra prediction mode of the block located on the left and top of the (0, 0) position samples of each sub block may be derived to the intra prediction mode of each sub block. The statistical value may be, for example, an average value. Alternatively, when at least one of the intra prediction modes of the neighboring block is the non-directional mode, the intra prediction mode of the subblock may be derived from the intra prediction mode among the intra prediction modes of the neighboring block. The non-directional mode may include, for example, a planar mode (mode number 0) and a DC mode (mode number 1). For example, the intra prediction mode of each sub block illustrated in FIG. 19 may be derived using Equation 8 below.

도 20은 현재 블록이 서브 블록으로 분할되는 또 다른 실시예를 도시한 도면이다.20 is a diagram illustrating another embodiment in which a current block is divided into sub blocks.
도 20에 있어서, 각 블록 내의 숫자는 해당 블록의 화면 내 예측 모드의 번호를 의미한다. 또한, Cx(x는 1 .. 14)는 현재 블록 내의 x번째 서브 블록을 의미한다. 또한, 화살표는 해당 블록의 화면 내 예측 방향 또는 각도를 의미한다. In FIG. 20, the number in each block means the number of intra prediction modes of the block. In addition, Cx (x is 1 .. 14) means the x-th sub-block in the current block. In addition, an arrow means an intra prediction direction or an angle of the block.
도 20을 참조하여 설명하는 실시예에서는, 먼저, 현재 블록에 대한 화면 내 예측 모드 및 서브 블록의 분할 정보 중 적어도 하나가 복호화를 통해 유도될 수 있다. 현재 블록 내의 각 서브 블록에 대한 화면 내 예측 모드는 상기 유도된 현재 블록의 화면 내 예측 모드와 각 서브 블록의 (0, 0) 위치 샘플의 좌측과 상단에 위치한 블록의 화면 내 예측 모드의 평균 값을 이용하여 유도될 수 있다. 예를 들어, 상기 유도된 현재 블록의 화면 내 예측 모드가 상기 평균 값 보다 큰 경우, 상기 평균 값의 1/2만큼을 상기 유도된 화면 내 예측 모드에서 빼줄 수 있고, 작거나 같은 경우에는 더해줄 수 있다. 이때, 상기 평균 값 대신, 전술한 통계 값 중 적어도 하나가 이용될 수 있다.In an embodiment described with reference to FIG. 20, first, at least one of an intra prediction mode for a current block and split information of a sub block may be derived through decoding. The intra prediction mode for each sub block in the current block is an average value of the intra prediction mode of the derived current block and the intra prediction mode of the block located at the left and top of the (0, 0) position sample of each sub block. It can be derived using. For example, when the intra prediction mode of the derived current block is larger than the average value, 1/2 of the average value may be subtracted from the derived intra prediction mode, and may be added when the value is smaller than or equal to the average value. have. In this case, at least one of the aforementioned statistical values may be used instead of the average value.
또는, 상기 주변 블록의 화면 내 예측 모드 중 적어도 하나의 모드가 비방향성 모드인 경우 상기 주변 블록의 화면 내 예측 모드 중 방향성 모드로 서브 블록의 화면 내 예측 모드를 유도할 수 있다. 비방향성 모드는 예컨대, Planar 모드(모드 번호 0) 및 DC 모드(모드 번호 1)를 포함할 수 있다. 예를 들어, 상기 유도된 현재 블록의 화면 내 예측 모드가 52라고 가정할 경우, 도 20에 도시된 각각의 서브 블록의 화면 내 예측 모드는 아래의 수학식 9를 이용하여 유도될 수 있다. Alternatively, when at least one of the intra prediction modes of the neighboring block is the non-directional mode, the intra prediction mode of the subblock may be derived from the intra prediction mode among the intra prediction modes of the neighboring block. The non-directional mode may include, for example, a planar mode (mode number 0) and a DC mode (mode number 1). For example, assuming that the intra prediction mode of the derived current block is 52, the intra prediction mode of each sub block illustrated in FIG. 20 may be derived using Equation 9 below.

화면 내 예측 모드를 유도함에 있어, 현재 블록을 현재 블록의 크기보다 작은 복수 개의 서브 블록으로 분할한 후, 각 서브 블록의 화면 내 예측 모드를 유도할 수 있다. 이때, 화면 내 예측 모드는 화면 내 예측 방향을 의미할 수 있다. 이때, 화면 내 예측 모드는 부호화기 및 복호화기에서 미리 정의된 화면 내 예측 모드의 집합에 포함될 수 있다.In deriving the intra prediction mode, after dividing the current block into a plurality of sub blocks smaller than the size of the current block, the intra prediction mode of each sub block may be derived. In this case, the intra prediction mode may mean an intra prediction direction. In this case, the intra prediction mode may be included in a set of intra prediction modes predefined by the encoder and the decoder.
예를 들어, 현재 블록의 화면 내 예측 모드 및 현재 블록에 인접한 복원 블록들 중 화면 내 예측을 이용하여 부호화/복호화된 블록들의 화면 내 예측 모드들 중 적어도 하나 이상을 이용하여 현재 블록에 대한 화면 내 예측 방향 필드(Intra Prediction Direction Field, IPDF)를 생성할 수 있다. 상기 화면 내 예측 방향 필드를 생성할 때, 특정 변환 모델(transform model)을 사용할 수 있다. IPDF 생성 후 이를 이용하여 현재 블록 내 각 서브 블록의 화면 내 예측 모드를 결정할 수 있다.For example, in-screen prediction of the current block using at least one of the intra prediction mode of the current block and the intra prediction modes of blocks encoded / decoded using the intra prediction of the reconstructed blocks adjacent to the current block. A prediction direction field (IPDF) may be generated. When generating the intra prediction direction field, a specific transform model may be used. After generating the IPDF, it may be used to determine the intra prediction mode of each sub block in the current block.
또한, 상기 예와 유사하게, 현재 블록이 현재 블록보다 크기가 크거나 혹은 깊이가 얕은 블록으로부터 분할된 경우, 현재 블록은 현재 블록보다 크기가 크거나 혹은 깊이가 얕은 블록의 서브 블록일 수 있다. 이러한 경우, 상기 현재 블록보다 크기가 크거나 혹은 깊이가 얕은 블록에 인접한 복원 블록들 중 화면 내 예측으로 부호화/복호화된 블록들의 화면 내 예측 모드들 중 적어도 하나 이상을 이용하여 현재 블록에 대한 화면 내 예측 모드를 유도할 수 있다. 이때, 현재 블록에 대한 화면 내 예측 모드는 상기 화면 내 예측 방향 필드가 생성됨으로써 유도될 수 있다.Also, similarly to the above example, when the current block is divided from a block having a larger size or a shallower depth than the current block, the current block may be a sub block of a block having a larger size or a shallower depth than the current block. In this case, an intra-picture of the current block using at least one of intra-prediction modes of blocks encoded / decoded by intra prediction among reconstructed blocks adjacent to a block larger in size or shallower than the current block. The prediction mode can be derived. In this case, the intra prediction mode for the current block may be derived by generating the intra prediction direction field.
상기 특정 변환 모델은 강체 변환 (rigid transform), 닮음 변환 (similarity transform), 어파인 변환 (affine transform), 호모그래피 변환 (homography transform), 3차원 변환 (3D transform) 및 그 외 다른 변환들 중 적어도 하나 이상을 이용할 수 있다. 이때, 호모그래피 변환은 투영 변환일 수 있다.The specific transformation model may include at least one of a rigid transform, a similarity transform, an affine transform, a homography transform, a 3D transform, and other transforms. More than one can be used. In this case, the homography transformation may be a projection transformation.
이때, 현재 블록으로부터 분할된 각 서브 블록의 화면 내 예측 모드는 현재 블록의 화면 내 예측 모드 및 현재 블록에 인접한 복원 블록들 중 화면 내 예측을 이용하여 부호화/복호화된 블록들의 화면 내 예측 모드들 중 적어도 하나 이상을 이용하여 유도될 수 있으므로, 각 서브 블록의 화면 내 예측 모드를 엔트로피 부호화/복호화하는데 필요한 비트를 감소시킬 수 있다.In this case, the intra prediction mode of each sub-block divided from the current block may include the intra prediction mode of the current block and the intra prediction modes of the blocks encoded / decoded using the intra prediction of the reconstructed blocks adjacent to the current block. Since it can be derived using at least one or more, bits necessary for entropy encoding / decoding of the intra prediction mode of each subblock can be reduced.
상기 서브 블록의 크기(granularity)는 현재 블록의 크기보다 작거나 같을 수 있다. 예를 들어, 현재 블록의 크기가 MxN (M, N은 양의 정수)일 때, 서브 블록의 크기는 M/K x N/L 일 수 있다. 이때 K는 M의 양의 약수, L은 N의 양의 약수일 수 있다. 또한, M/K 혹은 N/L은 양의 정수일 수 있다.The granularity of the sub block may be smaller than or equal to the size of the current block. For example, when the size of the current block is M × N (M, N is a positive integer), the size of the sub block may be M / K × N / L. In this case, K may be a divisor of M and L may be a divisor of N. In addition, M / K or N / L may be a positive integer.
또한, 상기 서브 블록은 현재 블록을 기준으로 현재 블록 내에 P개만큼 존재할 수 있다. 여기서, P는 0을 포함한 양의 정수를 의미할 수 있다. 예를 들어, 현재 블록 내에는 서브 블록이 1개, 2개, 4개, 16개 등 존재할 수 있다.In addition, as many as P subblocks may exist in the current block based on the current block. Here, P may mean a positive integer including 0. For example, one, two, four, sixteen, or the like may exist in the current block.
또한, 현재 블록이 상기 서브 블록으로 분할될 때는 서브 블록으로 분할되었는지에 대한 정보를 별도로 엔트로피 부호화/복호화하지 않을 수 있다. 현재 블록의 화면 내 예측 모드를 서브 블록 단위로 유도했는지의 여부를 지시하는 정보를 기반으로 현재 블록이 서브 블록으로 분할되었는지의 여부를 판단할 수 있다.In addition, when the current block is divided into the sub-blocks, information about whether the current block is divided into sub-blocks may not be separately entropy encoded / decoded. It may be determined whether the current block is divided into sub-blocks based on information indicating whether the intra prediction mode of the current block is derived on a sub-block basis.
또한, 상기 서브 블록의 화면 내 예측 모드는 현재 블록의 화면 내 예측 모드 및 현재 블록에 인접한 복원 블록들 중 화면 내 예측을 이용하여 부호화/복호화된 블록들의 화면 내 예측 모드들 중 적어도 하나 이상을 이용하여 유도되므로, 서브 블록의 화면 내 예측 모드를 엔트로피 부호화/복호화하지 않을 수 있다. 다만, 현재 블록의 화면 내 예측 모드는 엔트로피 부호화/복호화될 수도 있다. 다만, 현재 블록이 1개의 서브 블록으로 구성되는 경우, 현재 블록의 화면 내 예측 모드는 엔트로피 부호화/복호화되지 않고, 현재 블록에 인접한 복원 블록들 중 화면 내 예측을 이용하여 부호화/복호화된 블록들의 화면 내 예측 모드들 중 적어도 하나 이상을 이용하여 유도될 수 있다.The intra prediction mode of the sub-block may use at least one of intra prediction modes of the current block and intra prediction modes of blocks encoded / decoded using intra prediction among reconstructed blocks adjacent to the current block. In this case, the intra prediction mode of the subblock may not be entropy coded / decoded. However, the intra prediction mode of the current block may be entropy encoded / decoded. However, when the current block is composed of one sub-block, the intra prediction mode of the current block is not entropy encoded / decoded, but is a screen of blocks encoded / decoded using intra prediction from the reconstructed blocks adjacent to the current block. It may be derived using at least one or more of my prediction modes.
IPDF 생성을 위해 사용되는 현재 블록에 인접한 복원 블록들 중 화면 내 예측을 이용하여 부호화/복호화된 블록들을 시드 블록(seed block)이라고 할 수 있다. 시드 블록의 위치는 시드 위치(seed point)라고 할 수 있다. 시드 위치(seed point)를 포함하는 시드 블록(seed block)이 갖는 화면 내 예측 모드는 시드 위치 화면 내 예측 모드 (seed point intra prediction mode, SPIPM)라고 할 수 있다.Among the reconstructed blocks adjacent to the current block used for generating the IPDF, blocks encoded / decoded using intra prediction may be referred to as seed blocks. The location of the seed block may be referred to as a seed point. An intra prediction mode of a seed block including a seed point may be referred to as a seed point intra prediction mode (SPIPM).
도 21은 시드 위치 화면 내 예측 모드를 이용하여 현재 블록의 화면 내 예측 모드를 유도하는 일 실시예를 설명하기 위한 도면이다.FIG. 21 is a diagram illustrating an example of deriving an intra prediction mode of a current block by using an intra prediction mode.
도 21에 도시된 예에서, 현재 블록의 크기는 16x16이고, 각 서브 블록의 크기는 (16/4)x(16/4)일 수 있다. 이때, 시드 블록은 화면 내 예측을 이용하여 부호화/복호화된 복수의 인접 블록들 중 적어도 하나가 될 수 있다. 이때, 시드 블록 혹은 시드 위치는 현재 블록을 기준으로 고정된 위치일 수 있다. 또한, 현재 블록을 기준으로 상단, 좌측, 좌상단, 좌하단, 우상단 블록 혹은 위치 중 적어도 하나 이상이 시드 블록 혹은 시드 위치로 결정될 수 있다.In the example shown in FIG. 21, the size of the current block may be 16 × 16, and the size of each sub block may be (16/4) × (16/4). In this case, the seed block may be at least one of a plurality of adjacent blocks encoded / decoded using intra prediction. In this case, the seed block or seed position may be a fixed position based on the current block. In addition, at least one of the top, left, top left, bottom left, and top right blocks or positions may be determined as the seed block or the seed position based on the current block.
일 예로, 현재 블록 상단의 인접 블록들 c, d, e, f, g 중 적어도 하나 이상의 인접 블록의 화면 내 예측 모드가 SPIPM으로 이용될 수 있다. For example, the intra prediction mode of at least one or more adjacent blocks among the adjacent blocks c, d, e, f, and g of the current block may be used as the SPIPM.
또는, 현재 블록 우상단의 인접 블록 h의 화면 내 예측 모드가 SPIPM으로 이용될 수 있다. Alternatively, the intra prediction mode of the adjacent block h at the upper right end of the current block may be used as the SPIPM.
또는, 현재 블록 좌상단의 인접 블록들 a, b 중 적어도 하나 이상의 인접 블록의 화면 내 예측 모드가 SPIPM으로 이용될 수 있다. Alternatively, the intra prediction mode of at least one or more adjacent blocks among the adjacent blocks a and b in the upper left of the current block may be used as the SPIPM.
또는, 현재 블록 좌측의 인접 블록들 i, j, k, l 중 적어도 하나 이상의 화면 내 예측 모드가 SPIPM으로 이용될 수 있다.Alternatively, at least one intra prediction mode among the adjacent blocks i, j, k, and l on the left side of the current block may be used as the SPIPM.
또는, 현재 블록 좌하단의 인접 블록 m의 화면 내 예측 모드가 SPIPM으로 이용될 수 있다.Alternatively, the intra prediction mode of the adjacent block m at the lower left of the current block may be used as the SPIPM.
예를 들면, 현재 블록의 화면 내 예측 모드도 SPIPM으로 이용될 수 있다. For example, the intra prediction mode of the current block may also be used as the SPIPM.
IPDF는 하나 이상의 시드 위치(seed point)의 SPIPM을 이용하여 생성될 수 있다. IPDFs may be generated using SPIPMs of one or more seed points.
예를 들어, 특정 변환 모델의 파라미터 결정을 위한 복수 개의 시드 위치의 좌표가 (x_sp, y_sp) (sp=1,2,3,…)이고, 시드 위치를 포함하는 시드 블록(seed block)의 SPIPM이 mode_sp (sp=1,2,3,…)일 때, 특정 변환 모델을 이용한 변환 이후의 각 시드 위치의 좌표 (x_sp', y_sp')는 (x_sp', y_sp')=(x_sp + dx, y_sp + dy)로 결정 될 수 있다. 이때, dx는 x축 방향의 변위를 dy는 y축 방향의 변위를 의미할 수 있다. 또한, dx = D_sub*cosθ 와 dy = D_sub* sinθ로 결정될 수 있다.For example, the coordinates of a plurality of seed positions for parameter determination of a specific transformation model are (x_sp, y_sp) (sp = 1, 2, 3, ...), and the SPIPM of the seed block including the seed positions. When this mode_sp (sp = 1, 2, 3, ...), the coordinates (x_sp ', y_sp') of each seed position after conversion using a specific transformation model are (x_sp ', y_sp') = (x_sp + dx, y_sp + dy). In this case, dx may mean displacement in the x-axis direction and dy may mean displacement in the y-axis direction. In addition, it may be determined by dx = D_sub * cosθ and dy = D_sub * sinθ.
이때, θ는 SPIPM에 따라 결정될 수 있다. 예를 들어, 화면 내 예측 모드가 도 6에 도시된 바와 같은 방향성 모드인 경우, 각 SPIPM은 유일한 방향성을 갖고 x축 기준의 양의 각도가 θ로 정해질 수 있다. In this case, θ may be determined according to the SPIPM. For example, when the intra prediction mode is a directional mode as shown in FIG. 6, each SPIPM has a unique direction and a positive angle of the x-axis reference may be determined as θ.
예를 들어, 수직 방향의 화면 내 예측 모드의 경우 θ = 270°가 될 수 있다.For example, θ = 270 ° in the vertical prediction mode.
예를 들어, 수평 방향의 화면 내 예측 모드의 경우 θ = 0°가 될 수 있다.For example, in the horizontal prediction mode, θ may be 0 °.
예를 들어, 좌하단 대각 방향의 화면 내 예측 모드의 경우 θ = 225°가 될 수 있다.For example, in the intra prediction mode in the lower left diagonal direction, θ may be 225 °.
예를 들어, 우상단 대각 방향의 화면 내 예측 모드의 경우 θ = 45°가 될 수 있다.For example, in the intra prediction mode in the upper right diagonal direction, θ may be 45 °.
예를 들어, 우하단 대각 방향의 화면 내 예측 모드의 경우 θ = 135°가 될 수 있다.For example, in the intra prediction mode in the lower right diagonal direction, θ may be 135 °.
이때, DC 혹은 Planar 모드와 같이 방향성을 가지지 않는 화면 내 예측 모드는 θ 를 특정한 값으로 결정할 수 있다. 상기 특정한 값은 예컨대, 0, 90, 180, 270 등의 각도일 수 있다.In this case, the intra prediction mode having no orientation, such as DC or planar mode, may determine θ as a specific value. The specific value may be, for example, an angle of 0, 90, 180, 270, or the like.
SPIPM는 시드 위치에서 방향성을 의미하고, D_sub는 해당 방향을 갖는 벡터의 크기를 의미할 수 있다. D_sub의 크기는 시드 위치가 속한 시드 블록의 크기 및/또는 형태에 따라 결정될 수 있다. 또한, D_sub는 모든 화면 내 예측 모드에서 고정된 값 P를 가질 수 있다. 여기서, P는 0을 포함한 정수일 수 있다. 예를 들어, 현재 블록이 MxN (M, N은 양의 정수)블록일 때, D_cur=S (S는 양의 정수)라고 하면, KxL (K, L은 양의 정수)인 시드 블록의 D_sub (sub=1,2,3,…)는 D_sub=S*(KxL)/(MxN)로 결정될 수 있다. 예를 들어, 도 21에서, 현재 블록의 크기가 16x16일 때, D_cur = S이고 시드 블록의 D_sub는 후술하는 방법들 중 하나 이상의 방법으로 결정될 수 있다. SPIPM means directionality at the seed position, and D_sub may mean the size of the vector having the corresponding direction. The size of D_sub may be determined according to the size and / or shape of the seed block to which the seed location belongs. In addition, D_sub may have a fixed value P in all intra prediction modes. Here, P may be an integer including 0. For example, if the current block is an MxN (M, N is a positive integer) block, D_cur = S (S is a positive integer), the D_sub (of the seed block is KxL (K, L is a positive integer). sub = 1,2,3, ...) may be determined as D_sub = S * (KxL) / (MxN). For example, in FIG. 21, when the size of the current block is 16 × 16, D_cur = S and D_sub of the seed block may be determined by one or more of the methods described below.
예를 들어, 시드 블록 d 또는 e의 D_sub = S* (4x8) /(16x16) = S/8 로 결정될 수 있다. For example, D_sub = S * (4x8) / (16x16) = S / 8 of the seed block d or e may be determined.
예를 들어, 시드 블록 g 또는 j의 D_sub = S* (8x8) /(16x16) = S/4 로 결정될 수 있다. For example, it may be determined that D_sub = S * (8x8) / (16x16) = S / 4 of the seed block g or j.
예를 들어, 시드 블록 k 또는 l 의 D_sub = S* (8x4) /(16x16) = S/8 로 결정될 수 있다. For example, it may be determined that D_sub = S * (8x4) / (16x16) = S / 8 of the seed block k or l.
예를 들어, 시드 블록 m 또는 h 의 D_sub = S* (16x16) /(16x16) = S 로 결정될 수 있다. For example, D_sub = S * (16 × 16) / (16 × 16) = S of the seed block m or h may be determined.
예를 들어, 모든 시드 블록의 D_sub를 S로 결정할 수 있다. For example, D_sub of all seed blocks may be determined as S.
SPIPM의 리스트를 구성하여 현재 블록의 IPDF를 생성하기 위한 후보(candidate)를 구성할 수 있다. SPIPM 리스트는 현재 블록에 이웃한 이웃 블록들 중 적어도 하나의 화면 내 예측 모드를 이용하여 생성될 수 있다. 일 예로, SPIPM은 현재 블록의 좌상단 (SPIPM_TL), 우상단 (SPIPM_TR), 좌하단 (SPIPM_BL), 우하단 (SPIPM_BR) 중 하나 이상의 후보들의 집합(set)으로 구성될 수 있다. 이때, WxH 크기의 현재 블록에 대해 SPIPM_TL은 현재 블록의 (0,0) 위치의 상단 및 좌상단 및 좌측에 위치한 인접 블록의 화면 내 예측 모드 중 적어도 하나를 후보로 가질 수 있다. SPIPM_TR은 현재 블록의 (W-1, 0) 위치의 상단 및 우상단에 위치한 인접 블록의 화면 내 예측 모드 중 적어도 하나를 후보로 가질 수 있다. SPIPM_BL은 현재 블록의 (0, H-1) 위치의 좌측 및 좌하단에 위치한 인접 블록의 화면 내 예측 모드 중 적어도 하나를 후보로 가질 수 있다. SPIPM_BR은 현재 블록에 이웃하는 이웃 블록의 화면 내 예측 모드를 나타낼 수도 있다. 또는 SPIPM_BR은 현재 블록의 화면 내 예측 모드를 나타내는 것에 이용될 수도 있다.A list of SPIPMs can be constructed to form a candidate for generating an IPDF of the current block. The SPIPM list may be generated using an intra prediction mode of at least one of neighboring blocks neighboring the current block. For example, the SPIPM may be configured with a set of one or more candidates among the upper left end (SPIPM_TL), the upper right end (SPIPM_TR), the lower left end (SPIPM_BL), and the lower right end (SPIPM_BR) of the current block. In this case, the SPIPM_TL may have at least one of the intra prediction modes of the neighboring blocks located at the upper and upper left and the left of the (0,0) position of the current block for the current block of the WxH size. The SPIPM_TR may have at least one of the intra prediction modes of the neighboring blocks located at the top and the top right of the (W-1, 0) position of the current block as a candidate. The SPIPM_BL may have at least one of the intra prediction modes of the adjacent blocks located at the left and the lower left of the (0, H-1) position of the current block as a candidate. SPIPM_BR may indicate an intra prediction mode of a neighboring block neighboring the current block. Alternatively, SPIPM_BR may be used to indicate an intra prediction mode of the current block.
도 21에 도시된 예에서, SPIPM_TL은 인접 블록 d, b 및 j의 화면 내 예측 모드 중 적어도 하나를 가질 수 있다. 또한, SPIPM_TR은 인접 블록 g 및 h의 화면 내 예측 모드 중 적어도 하나를 가질 수 있다. 또한, SPIPM_BL은 인접 블록 i 및 m의 화면 내 예측 모드 중 적어도 하나를 가질 수 있다. 또한, SPIPM_BR은 현재 블록의 화면 내 예측 모드 중 적어도 하나를 가질 수 있다.In the example illustrated in FIG. 21, the SPIPM_TL may have at least one of intra prediction modes of adjacent blocks d, b, and j. In addition, SPIPM_TR may have at least one of intra prediction modes of adjacent blocks g and h. In addition, SPIPM_BL may have at least one of intra prediction modes of adjacent blocks i and m. In addition, SPIPM_BR may have at least one of intra prediction modes of the current block.
또한, 시드 블록 혹은 시드 위치는 일정한 순서대로 탐색될 수 있다. 예를 들어, 좌측, 상단, 좌하단, 우상단, 상단의 순서대로 탐색되어 해당 시드 블록 혹은 시드 위치에 존재하는 화면 내 예측 모드를 이용하여 SPIPM의 리스트를 구성할 수 있다.In addition, the seed block or seed positions may be searched in a certain order. For example, a list of SPIPMs may be constructed using an intra prediction mode that is searched in the order of left, top, bottom left, top right, and top and exists at a corresponding seed block or seed position.
SPIPM의 리스트를 구성하기 위해 SPIPM_TL, SPIPM_TR, SPIPM_BL 및 SPIPM_BR의 각각의 후보들 중 적어도 하나에 대하여 화면 내 예측 모드간의 유사도를 기반으로 다른 모드들의 방향과 상이한 방향을 갖는 모드를 제외시키는 과정을 수행할 수 있다. 이때, 화면 내 예측 모드간 IPMD(Intra Prediction Mode Difference)를 유사도의 측정 기준으로 이용할 수 있다. 비방향성 모드(예를 들어, DC_MODE와 PLANAR_MODE)는 SPIPM 리스트 구성에서 제외시킬 수 있다. In order to construct a list of SPIPM, at least one of each candidate of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR may be configured to exclude a mode having a different direction from that of other modes based on the similarity between prediction modes in the picture. have. In this case, IPMD (Intra Prediction Mode Difference) between intra prediction modes may be used as a measure of similarity. Non-directional modes (eg DC_MODE and PLANAR_MODE) can be excluded from the SPIPM list configuration.
예를 들어, SPIPM_TL의 세 후보 모드(SPIPM_TL_mode)의 각각에 대하여 SPIPM_neighbor(neighbor = TR or BL or BR)의 후보 모드들과 비교하여 IPMD=abs(SPIPM_TL_mode - SPIPM_neighbor) > Th1 (Th1는 양의 정수)일 경우 해당 모드를 SPIPM_TL를 위한 후보 셋(set)에서 제외시킬 수 있다. For example, for each of the three candidate modes (SPIPM_TL_mode) of SPIPM_TL, IPMD = abs (SPIPM_TL_mode-SPIPM_neighbor)> Th1 (Th1 is a positive integer) compared to the candidate modes of SPIPM_neighbor (neighbor = TR or BL or BR). In this case, the corresponding mode may be excluded from the candidate set for SPIPM_TL.
예를 들어, SPIPM_TR의 두 후보 모드(SPIPM_TR_mode)의 각각에 대하여 SPIPM_neighbor(neighbor = TL or BL or BR)의 후보 모드들과 비교하여 IPMD=abs(SPIPM_TR_mode - SPIPM_neighbor) > Th2 (Th2는 양의 정수)일 경우 해당 모드를 SPIPM_TR를 위한 후보 셋에서 제외시킬 수 있다. For example, for each of the two candidate modes (SPIPM_TR_mode) of SPIPM_TR, IPMD = abs (SPIPM_TR_mode-SPIPM_neighbor)> Th2 (Th2 is a positive integer) compared to the candidate modes of SPIPM_neighbor (neighbor = TL or BL or BR). In this case, the mode may be excluded from the candidate set for SPIPM_TR.
예를 들어, SPIPM_BL의 두 후보 모드(SPIPM_BL_mode)의 각각에 대하여 SPIPM_neighbor(neighbor = TL or TR or BR)의 후보 모드들과 비교하여 IPMD=abs(SPIPM_BL_mode - SPIPM_neighbor) > Th3 (Th3는 양의 정수)일 경우 해당 모드를 SPIPM_BL를 위한 후보 셋에서 제외시킬 수 있다. For example, for each of the two candidate modes (SPIPM_BL_mode) of SPIPM_BL, IPMD = abs (SPIPM_BL_mode-SPIPM_neighbor)> Th3 (Th3 is a positive integer) compared to the candidate modes of SPIPM_neighbor (neighbor = TL or TR or BR). In this case, the mode may be excluded from the candidate set for SPIPM_BL.
예를 들어, SPIPM_BR의 후보 모드(SPIPM_BR_mode)의 각각에 대하여 SPIPM_neighbor(neighbor = TL or TR or BL)의 후보 모드들과 비교하여 IPMD=abs(SPIPM_BR_mode - SPIPM_neighbor) > Th4 (Th4는 양의 정수)일 경우 해당 모드를 SPIPM_BR를 위한 후보 set에서 제외시킬 수 있다. For example, for each of the candidate modes (SPIPM_BR_mode) of SPIPM_BR, IPMD = abs (SPIPM_BR_mode-SPIPM_neighbor)> Th4 (Th4 is a positive integer) compared to the candidate modes of SPIPM_neighbor (neighbor = TL or TR or BL). In this case, the mode can be excluded from the candidate set for SPIPM_BR.
예를 들어, SPIPM_TL, SPIPM_TR, SPIPM_BL 및 SPIPM_BR 각각의 후보들 중 적어도 하나가 DC 혹은 Planar 모드와 같이 방향성을 가지지 않는 화면 내 예측 모드일 경우, 해당 후보를 후보 set에서 제외시킬 수 있다.For example, when at least one of the candidates of the SPIPM_TL, the SPIPM_TR, the SPIPM_BL, and the SPIPM_BR is an intra prediction mode without directivity, such as DC or planar mode, the candidate may be excluded from the candidate set.
SPIPM 리스트를 구성하기 위한 각 후보 모드들 중 유사도가 작은 후보들을 제외한 후, IPDF의 생성을 위해 필요한 SPIPM의 개수는 사용되는 특정 2D 변환 모델에 따라 결정될 수 있다. 예컨대, 2D 변환 모델은 강체 변환, 닮은 변환, 어파인 변환, 호모그래피 변환 등을 포함할 수 있다. 또한, 예컨대, SPIPM의 개수는 2D 변환 모델에 따라 1개, 2개, 3개, 4개 혹은 N개(N은 양의 정수) 등 가변적으로 결정될 수 있다.After excluding candidates having similarities among the candidate modes for constructing the SPIPM list, the number of SPIPMs required for generating an IPDF may be determined according to a specific 2D transformation model used. For example, the 2D transformation model may include a rigid transformation, similar transformation, affine transformation, homography transformation, and the like. Also, for example, the number of SPIPMs may be variably determined, such as one, two, three, four, or N (N is a positive integer) according to the 2D transformation model.
예를 들어, IPDF의 생성을 위한 변환 모델로서 강체 변환(rigid transform)을 사용하는 경우, 적어도 2개의 SPIPM이 필요할 수 있다. For example, when using a rigid transform as a transformation model for generation of IPDF, at least two SPIPMs may be needed.
강체 변환의 경우 아래 수학식 10과 같이 3-DoF(degree of freedom)을 가질 수 있다. 이때, (x, y)는 시드 위치의 변환 전 좌표일 수 있고, (x', y')은 변환 후 좌표일 수 있다. θ, tx, ty는 결정해야 할 모델 파라미터들로써 각각 회전 각도, x축 이동 변위, y축 이동 변위가 될 수 있다. In the case of a rigid body transformation, it may have 3-DoF (degree of freedom) as shown in Equation 10 below. In this case, (x, y) may be a coordinate before transformation of the seed position, and (x ', y') may be a coordinate after transformation. θ, tx, ty are model parameters to be determined, and may be rotation angle, x-axis displacement, and y-axis displacement, respectively.

1개의 SPIPM로부터 결정되는 θ를 이용하여 (x, y)-(x', y')쌍을 구할 수 있고, 수학식 10에 대입하여 θ, tx, ty에 관한 2개의 식이 결정될 수 있다. 또한, 2개의 SPIPM로부터 θ, tx, ty에 관한 4개의 식이 결정될 수 있고, 이 중 3개의 식을 이용하여 강체 변환 모델을 결정할 수 있다. (X, y)-(x ', y') pairs can be obtained using θ determined from one SPIPM, and two equations relating to θ, tx, ty can be determined by substituting Equation (10). In addition, four equations for θ, tx, and ty may be determined from two SPIPMs, and three of them may be used to determine a rigid body transformation model.
2개의 SPIPM은 SPIPM_TL, SPIPM_TR, SPIPM_BL 및 SPIPM_BR 중 적어도 2개를 선택하여 결정할 수 있다. 상기 선택된 SPIPM을 SPIPM 리스트에 추가할 수 있다. Two SPIPMs may be determined by selecting at least two of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR. The selected SPIPM may be added to the SPIPM list.
도 22는 2개의 SPIPM을 포함하는 SPIPM 리스트를 구성하는 일 실시예를 도시한 도면이다. FIG. 22 is a diagram illustrating an embodiment of constructing a SPIPM list including two SPIPMs.
도 22에 도시된 바와 같이, 2개의 SPIPM 후보 모드의 IPMD 값의 합이 작은 순서대로 차례로 SPIPM 리스트를 채울 수 있다. As shown in FIG. 22, the sum of the IPMD values of the two SPIPM candidate modes may be sequentially filled in the SPIPM list.
예를 들어, SPIPM_TL의 후보 모드 중 하나와 SPIPM_TR의 후보 모드 중 하나를 2개의 SPIPM으로 이용할 수 있다. For example, one of the candidate modes of SPIPM_TL and one of the candidate modes of SPIPM_TR may be used as two SPIPMs.
예를 들어, SPIPM_TL의 후보 모드 중 하나와 SPIPM_BL의 후보 모드 중 하나를 2개의 SPIPM으로 이용할 수 있다. For example, one of the candidate modes of SPIPM_TL and one of the candidate modes of SPIPM_BL may be used as two SPIPMs.
예를 들어, SPIPM_TL의 후보 모드 중 하나와 SPIPM_BR의 후보 모드 중 하나를 2개의 SPIPM으로 이용할 수 있다. For example, one of the candidate modes of SPIPM_TL and one of the candidate modes of SPIPM_BR may be used as two SPIPMs.
예를 들어, SPIPM_TR의 후보 모드 중 하나와 SPIPM_BL의 후보 모드 중 하나를 2개의 SPIPM으로 이용할 수 있다.For example, one of the candidate modes of SPIPM_TR and one of the candidate modes of SPIPM_BL may be used as two SPIPMs.
예를 들어, SPIPM_TR의 후보 모드 중 하나와 SPIPM_BR의 후보 모드 중 하나를 2개의 SPIPM으로 이용할 수 있다.For example, one of the candidate modes of SPIPM_TR and one of the candidate modes of SPIPM_BR may be used as two SPIPMs.
예를 들어, SPIPM_BL의 후보 모드 중 하나와 SPIPM_BR의 후보 모드 중 하나를 2개의 SPIPM으로 이용할 수 있다.For example, one of the candidate modes of SPIPM_BL and one of the candidate modes of SPIPM_BR may be used as two SPIPMs.
2개의 SPIPM이 채워지지 않은 경우, 가용한 SPIPM을 이용하여 SPIPM 리스트를 채울 수 있다. 예컨대, SPIPM±delta를 이용하여 SPIPM 리스트를 채울 수 있다. 이때, delta는 임의의 양의 정수일 수 있으며, 예컨대, 1, 2, 3,… 등의 값을 가질 수 있다. If two SPIPMs are not filled, the SPIPM list can be populated using the available SPIPMs. For example, SPIPM ± delta can be used to populate the SPIPM list. In this case, delta may be any positive integer, for example, 1, 2, 3,... It can have a value such as.
2개의 SPIPM(SPIPM1, SPIPM2)이 결정되면, 수학식 10을 이용하여, θ, tx, ty에 관한 4개의 식을 생성하고, 이 중 3개의 식을 이용하여 강체 변환 모델의 파라미터들을 결정할 수 있다. 결정된 모델은 IPDF 생성을 위해 이용될 수 있다. When two SPIPMs (SPIPM1 and SPIPM2) are determined, four equations for θ, tx, and ty can be generated using Equation 10, and three of them can be used to determine parameters of the rigid body transformation model. . The determined model can be used for generating IPDF.
예를 들어, SPIPM1로 계산한 2개의 식과 SPIPM2로 계산한 2개의 식 중 적어도 1개의 식을 이용하여 강체 변환을 결정할 수 있다. For example, the rigid body transformation may be determined using at least one of two equations calculated with SPIPM1 and two equations calculated with SPIPM2.
예를 들어, SPIPM1로 계산한 2개의 식 중 적어도 1개의 식과 SPIPM2로 계산한 2개의 식을 이용하여 강체 변환을 결정할 수 있다.For example, the rigid body transformation may be determined using at least one of two equations calculated with SPIPM1 and two equations calculated with SPIPM2.
예를 들어, IPDF 생성을 위한 변환 모델로 닮음 변환(similarity transform)을 사용하는 경우 적어도 2개의 SPIPM이 필요할 수 있다. For example, at least two SPIPMs may be required when using a similarity transform as a transformation model for generating an IPDF.
닮음 변환의 경우 아래 수학식 11과 같이 4-DoF(degree of freedom)을 가질 수 있다. 이때, (x, y)는 시드 위치의 변환 전 좌표일 수 있고, (x', y')은 변환 후 좌표일 수 있다. a, b, c, d는 결정해야 할 모델 파라미터가 될 수 있다. The similarity transformation may have 4-DoF (degree of freedom) as shown in Equation 11 below. In this case, (x, y) may be a coordinate before transformation of the seed position, and (x ', y') may be a coordinate after transformation. a, b, c, and d may be model parameters to be determined.

1개의 SPIPM로부터 결정되는 θ를 이용하여 (x, y)-(x', y')쌍을 구할 수 있고 수학식 11에 대입하여 a, b, c, d 에 관한 2개의 식이 결정될 수 있다. 또한, 2개의 SPIPM 로부터 a, b, c, d 에 관한 4개의 식이 결정될 수 있고, 이를 이용하여 닮음 변환 모델을 결정할 수 있다. (X, y)-(x ', y') pairs can be obtained using θ determined from one SPIPM, and two equations for a, b, c, and d can be determined by substituting Equation (11). In addition, four equations for a, b, c, and d may be determined from the two SPIPMs, and the similarity transformation model may be determined using the equations.
2개의 SPIPM은 SPIPM_TL, SPIPM_TR, SPIPM_BL 및 SPIPM_BR 중 적어도 2개를 선택하여 결정할 수 있다. 상기 선택된 SPIPM을 SPIPM 리스트에 추가할 수 있다. 이때, 도 22에 도시된 바와 같이, 2개 SPIPM 후보 모드의 IPMD 값의 합이 작은 순서대로 차례로 SPIPM 리스트를 채울 수 있다. Two SPIPMs may be determined by selecting at least two of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR. The selected SPIPM may be added to the SPIPM list. In this case, as shown in FIG. 22, the SPIPM list may be sequentially filled in order of the sum of the IPMD values of the two SPIPM candidate modes being small.
예를 들어, SPIPM_TL의 후보 모드 중 하나와 SPIPM_TR의 후보 모드 중 하나를 2개의 SPIPM으로 이용할 수 있다. For example, one of the candidate modes of SPIPM_TL and one of the candidate modes of SPIPM_TR may be used as two SPIPMs.
예를 들어, SPIPM_TL의 후보 모드 중 하나와 SPIPM_BL의 후보 모드 중 하나를 2개의 SPIPM으로 이용할 수 있다. For example, one of the candidate modes of SPIPM_TL and one of the candidate modes of SPIPM_BL may be used as two SPIPMs.
예를 들어, SPIPM_TL의 후보 모드 중 하나와 SPIPM_BR의 후보 모드 중 하나를 2개의 SPIPM으로 이용할 수 있다. For example, one of the candidate modes of SPIPM_TL and one of the candidate modes of SPIPM_BR may be used as two SPIPMs.
예를 들어, SPIPM_TR의 후보 모드 중 하나와 SPIPM_BL의 후보 모드 중 하나를 2개의 SPIPM으로 이용할 수 있다.For example, one of the candidate modes of SPIPM_TR and one of the candidate modes of SPIPM_BL may be used as two SPIPMs.
예를 들어, SPIPM_TR의 후보 모드 중 하나와 SPIPM_BR의 후보 모드 중 하나를 2개의 SPIPM으로 이용할 수 있다.For example, one of the candidate modes of SPIPM_TR and one of the candidate modes of SPIPM_BR may be used as two SPIPMs.
예를 들어, SPIPM_BL의 후보 모드 중 하나와 SPIPM_BR의 후보 모드 중 하나를 2개의 SPIPM으로 이용할 수 있다.For example, one of the candidate modes of SPIPM_BL and one of the candidate modes of SPIPM_BR may be used as two SPIPMs.
2개의 SPIPM이 채워지지 않은 경우, 가용한 SPIPM을 이용하여 SPIPM 리스트를 채울 수 있다. 예컨대, SPIPM±delta를 이용하여 SPIPM 리스트를 채울 수 있다. 이때, delta는 임의의 양의 정수일 수 있으며 1, 2, 3,… 등의 값을 가질 수 있다.If two SPIPMs are not filled, the SPIPM list can be populated using the available SPIPMs. For example, SPIPM ± delta can be used to populate the SPIPM list. In this case, delta may be any positive integer and 1, 2, 3,... It can have a value such as.
2개의 SPIPM(SPIPM1, SPIPM2)이 결정되면, 수학식 11을 통해 a, b, c, d 에 관한 4개의 식을 생성하여 닮음 변환 모델의 파라미터들을 결정할 수 있다. 결정된 모델은 IPDF 생성을 위해 이용될 수 있다.When two SPIPMs (SPIPM1 and SPIPM2) are determined, four equations for a, b, c, and d may be generated through Equation 11 to determine parameters of the similarity conversion model. The determined model can be used for generating IPDF.
예를 들어, IPDF 생성을 위한 변환 모델로 어파인 변환(affine transform)을 사용하는 경우 적어도 3개의 SPIPM이 필요할 수 있다. For example, at least three SPIPMs may be required when using affine transform as a transformation model for generating an IPDF.
어파인 변환의 경우 아래 수학식 12와 같이 6-DoF(degree of freedom)을 가질 수 있다. 이때, (x, y)는 시드 위치의 변환 전 좌표일 수 있고, (x', y')은 변환 후 좌표일 수 있다. a, b, c, d, e, f는 결정해야 할 모델 파라미터가 될 수 있다. In the case of affine transformation, it may have 6-DoF (degree of freedom) as shown in Equation 12 below. In this case, (x, y) may be a coordinate before transformation of the seed position, and (x ', y') may be a coordinate after transformation. a, b, c, d, e, and f may be model parameters to be determined.

1개의 SPIPM로부터 결정되는 θ를 이용하여 (x, y)-(x', y')쌍을 구할 수 있고 수학식 12에 대입하여 a, b, c, d, e, f 에 관한 2개의 식이 결정될 수 있다. 또한, 3개의 SPIPM 로부터 a, b, c, d, e, f 에 관한 6개의 식이 결정될 수 있고, 이를 이용하여 어파인 변환 모델을 결정할 수 있다. By using θ determined from one SPIPM, (x, y)-(x ', y') pairs can be obtained, and two equations for a, b, c, d, e, and f can be substituted into equation (12). Can be determined. In addition, six equations for a, b, c, d, e, and f may be determined from three SPIPMs, and the affine transformation model may be determined using the equations.
3개의 SPIPM은 SPIPM_TL, SPIPM_TR, SPIPM_BL 및 SPIPM_BR 중 적어도 3개를 선택하여 결정할 수 있다. 상기 선택된 SPIPM을 SPIPM 리스트에 추가할 수 있다.The three SPIPMs may be determined by selecting at least three of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR. The selected SPIPM may be added to the SPIPM list.
도 23은 3개의 SPIPM을 포함하는 SPIPM 리스트를 구성하는 일 실시예를 도시한 도면이다. FIG. 23 is a diagram illustrating an embodiment of configuring a SPIPM list including three SPIPMs.
도 23에 도시된 바와 같이, 3개 SPIPM 후보 모드의 IPMD 값의 합이 작은 순서대로 차례로 SPIPM 리스트를 채울 수 있다. As shown in FIG. 23, the sum of the IPMD values of the three SPIPM candidate modes may sequentially fill the SPIPM list.
예를 들어, SPIPM_TL의 후보 모드 중 하나와 SPIPM_TR의 후보 모드 중 하나와 SPIPM_BL의 후보 모드 중 하나를 3개의 SPIPM으로 이용할 수 있다. For example, one of the candidate modes of SPIPM_TL, one of the candidate modes of SPIPM_TR, and one of the candidate modes of SPIPM_BL may be used as three SPIPMs.
예를 들어, SPIPM_TL의 후보 모드 중 하나와 SPIPM_TR의 후보 모드 중 하나와 SPIPM_BR의 후보 모드 중 하나를 3개의 SPIPM으로 이용할 수 있다. For example, one of the candidate modes of SPIPM_TL, one of the candidate modes of SPIPM_TR, and one of the candidate modes of SPIPM_BR may be used as three SPIPMs.
예를 들어, SPIPM_TL의 후보 모드 중 하나와 SPIPM_BL의 후보 모드 중 하나와 SPIPM_BR의 후보 모드 중 하나를 3개의 SPIPM으로 이용할 수 있다.For example, one of the candidate modes of SPIPM_TL, one of the candidate modes of SPIPM_BL, and one of the candidate modes of SPIPM_BR may be used as three SPIPMs.
예를 들어, SPIPM_TR의 후보 모드 중 하나와 SPIPM_BL의 후보 모드 중 하나와 SPIPM_BR의 후보 모드 중 하나를 3개의 SPIPM으로 이용할 수 있다.For example, one of the candidate modes of SPIPM_TR, one of the candidate modes of SPIPM_BL, and one of the candidate modes of SPIPM_BR may be used as three SPIPMs.
3개의 SPIPM이 채워지지 않은 경우, 가용한 SPIPM을 이용하여 SPIPM 리스트를 채울 수 있다. 예컨대, SPIPM±delta를 이용하여 SPIPM 리스트를 채울 수 있다. 이때, delta는 임의의 양의 정수일 수 있으며 1, 2, 3,… 등의 값을 가질 수 있다.If three SPIPMs are not filled, the SPIPM list can be populated using the available SPIPMs. For example, SPIPM ± delta can be used to populate the SPIPM list. In this case, delta may be any positive integer and 1, 2, 3,... It can have a value such as.
3개의 SPIPM(SPIPM1, SPIPM2, SPIPM3)이 결정되면, 수학식 12를 통해 a, b, c, d, e, f 에 관한 6개의 식을 생성하여 어파인 변환 모델의 파라미터들을 결정할 수 있다. 결정된 모델은 IPDF 생성을 위해 이용될 수 있다.When three SPIPMs (SPIPM1, SPIPM2, and SPIPM3) are determined, Equation 12 may generate six equations for a, b, c, d, e, and f to determine the parameters of the affine transformation model. The determined model can be used for generating IPDF.
예를 들어, IPDF 생성을 위한 변환 모델로 호모그래피 변환(homography transform or perspective transform)을 사용하는 경우 적어도 4개의 SPIPM이 필요할 수 있다. For example, at least four SPIPMs may be required when using a homography transform or perspective transform as a transformation model for generating an IPDF.
호모그래피 변환의 경우 아래 수학식 13과 같이 8-DoF(degree of freedom)을 가질 수 있다. 이때, (x, y)는 시드 위치의 변환 전 좌표일 수 있고, (x', y')은 변환 후 좌표일 수 있다. h1, h2, h3, h4, h5, h6, h7, h8는 결정해야 할 모델 파라미터가 될 수 있다. In the case of the homography transformation, it may have 8-DoF (degree of freedom) as shown in Equation 13 below. In this case, (x, y) may be a coordinate before transformation of the seed position, and (x ', y') may be a coordinate after transformation. h1, h2, h3, h4, h5, h6, h7, h8 may be model parameters to be determined.

1개의 SPIPM로부터 결정되는 θ를 이용하여 (x, y)-(x', y')쌍을 구할 수 있고 수학식 13에 대입하여 h1, h2, h3, h4, h5, h6, h7, h8 에 관한 2개의 식이 결정될 수 있다. 또한, 4개의 SPIPM 로부터 h1, h2, h3, h4, h5, h6, h7, h8 에 관한 8개의 식이 결정될 수 있고, 이를 이용하여 호모그래피 변환 모델을 결정할 수 있다. (X, y)-(x ', y') pairs can be obtained using θ determined from one SPIPM and substituted into equation (13) to h1, h2, h3, h4, h5, h6, h7, h8. Two equations can be determined. In addition, eight equations for h1, h2, h3, h4, h5, h6, h7, h8 can be determined from the four SPIPMs, which can be used to determine homography transformation models.
4개의 SPIPM은 SPIPM_TL, SPIPM_TR, SPIPM_BL 및 SPIPM_BR 중 적어도 4개를 선택하여 결정할 수 있다. 상기 선택된 SPIPM을 SPIPM 리스트에 추가할 수 있다. Four SPIPMs may be determined by selecting at least four of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR. The selected SPIPM may be added to the SPIPM list.
도 24는 4개의 SPIPM을 포함하는 SPIPM 리스트를 구성하는 일 실시예를 도시한 도면이다. FIG. 24 is a diagram illustrating an embodiment of constructing a SPIPM list including four SPIPMs.
이때, 도 24에 도시된 바와 같이, 4개 SPIPM 후보 모드의 IPMD 값의 합이 작은 순서대로 차례로 SPIPM 리스트를 채울 수 있다. At this time, as shown in FIG. 24, the SPIPM list may be sequentially filled in order of the sum of the IPMD values of the four SPIPM candidate modes being small.
예를 들어, SPIPM_TL의 후보 모드 중 2개와 SPIPM_TR의 후보 모드 중 2개를 4개의 SPIPM으로 이용할 수 있다. For example, two of the candidate modes of SPIPM_TL and two of the candidate modes of SPIPM_TR may be used as four SPIPMs.
예를 들어, SPIPM_TL의 후보 모드 중 2개와 SPIPM_BL의 후보 모드 중 2개를 4개의 SPIPM으로 이용할 수 있다. For example, two of the candidate modes of SPIPM_TL and two of the candidate modes of SPIPM_BL may be used as four SPIPMs.
예를 들어, SPIPM_TL의 후보 모드 중 2개와 SPIPM_BR의 후보 모드 중 2개를 4개의 SPIPM으로 이용할 수 있다. For example, two of the candidate modes of SPIPM_TL and two of the candidate modes of SPIPM_BR may be used as four SPIPMs.
예를 들어, SPIPM_BL의 후보 모드 중 2개와 SPIPM_BR의 후보 모드 중 2개를 4개의 SPIPM으로 이용할 수 있다. For example, two of the candidate modes of SPIPM_BL and two of the candidate modes of SPIPM_BR may be used as four SPIPMs.
예를 들어, SPIPM_BL의 후보 모드 중 2개와 SPIPM_BR의 후보 모드 중 2개를 4개의 SPIPM으로 이용할 수 있다. For example, two of the candidate modes of SPIPM_BL and two of the candidate modes of SPIPM_BR may be used as four SPIPMs.
예를 들어, SPIPM_TL의 후보 모드 중 2개와 SPIPM_TR의 후보 모드 중 1개와 SPIPM_BL의 후보 모드 중 1개를 4개의 SPIPM으로 이용할 수 있다.For example, two of the candidate modes of SPIPM_TL, one of the candidate modes of SPIPM_TR, and one of the candidate modes of SPIPM_BL may be used as four SPIPMs.
예를 들어, SPIPM_TL의 후보 모드 중 2개와 SPIPM_TR의 후보 모드 중 1개와 SPIPM_BR의 후보 모드 중 1개를 4개의 SPIPM으로 이용할 수 있다.For example, two of the candidate modes of SPIPM_TL, one of the candidate modes of SPIPM_TR, and one of the candidate modes of SPIPM_BR may be used as four SPIPMs.
예를 들어, SPIPM_TL의 후보 모드 중 2개와 SPIPM_BL의 후보 모드 중 1개와 SPIPM_BR의 후보 모드 중 1개를 4개의 SPIPM으로 이용할 수 있다.For example, two of the candidate modes of SPIPM_TL, one of the candidate modes of SPIPM_BL, and one of the candidate modes of SPIPM_BR may be used as four SPIPMs.
예를 들어, SPIPM_TR의 후보 모드 중 2개와 SPIPM_TL의 후보 모드 중 1개와 SPIPM_BL의 후보 모드 중 1개를 4개의 SPIPM으로 이용할 수 있다.For example, two of the candidate modes of the SPIPM_TR, one of the candidate modes of the SPIPM_TL, and one of the candidate modes of the SPIPM_BL may be used as four SPIPMs.
예를 들어, SPIPM_TR의 후보 모드 중 2개와 SPIPM_TL의 후보 모드 중 1개와 SPIPM_BR의 후보 모드 중 1개를 4개의 SPIPM으로 이용할 수 있다.For example, two of the candidate modes of SPIPM_TR, one of the candidate modes of SPIPM_TL, and one of the candidate modes of SPIPM_BR may be used as four SPIPMs.
예를 들어, SPIPM_TR의 후보 모드 중 2개와 SPIPM_BL의 후보 모드 중 1개와 SPIPM_BR의 후보 모드 중 1개를 4개의 SPIPM으로 이용할 수 있다.For example, two of the candidate modes of SPIPM_TR and one of the candidate modes of SPIPM_BL and one of the candidate modes of SPIPM_BR may be used as four SPIPMs.
예를 들어, SPIPM_BL의 후보 모드 중 2개와 SPIPM_TL의 후보 모드 중 1개와 SPIPM_TR의 후보 모드 중 1개를 4개의 SPIPM으로 이용할 수 있다.For example, two of the candidate modes of SPIPM_BL, one of the candidate modes of SPIPM_TL, and one of the candidate modes of SPIPM_TR may be used as four SPIPMs.
예를 들어, SPIPM_BL의 후보 모드 중 2개와 SPIPM_TL의 후보 모드 중 1개와 SPIPM_BR의 후보 모드 중 1개를 4개의 SPIPM으로 이용할 수 있다.For example, two of the candidate modes of SPIPM_BL, one of the candidate modes of SPIPM_TL, and one of the candidate modes of SPIPM_BR may be used as four SPIPMs.
예를 들어, SPIPM_BL의 후보 모드 중 2개와 SPIPM_TR의 후보 모드 중 1개와 SPIPM_BR의 후보 모드 중 1개를 4개의 SPIPM으로 이용할 수 있다.For example, two of the candidate modes of SPIPM_BL, one of the candidate modes of SPIPM_TR, and one of the candidate modes of SPIPM_BR may be used as four SPIPMs.
예를 들어, SPIPM_BR의 후보 모드 중 2개와 SPIPM_TL의 후보 모드 중 1개와 SPIPM_TR의 후보 모드 중 1개를 4개의 SPIPM으로 이용할 수 있다.For example, two of the candidate modes of SPIPM_BR, one of the candidate modes of SPIPM_TL, and one of the candidate modes of SPIPM_TR may be used as four SPIPMs.
예를 들어, SPIPM_BR의 후보 모드 중 2개와 SPIPM_TL의 후보 모드 중 1개와 SPIPM_BL의 후보 모드 중 1개를 4개의 SPIPM으로 이용할 수 있다.For example, two of the candidate modes of SPIPM_BR, one of the candidate modes of SPIPM_TL, and one of the candidate modes of SPIPM_BL may be used as four SPIPMs.
예를 들어, SPIPM_BR의 후보 모드 중 2개와 SPIPM_TR의 후보 모드 중 1개와 SPIPM_BL의 후보 모드 중 1개를 4개의 SPIPM으로 이용할 수 있다.For example, two of the candidate modes of SPIPM_BR, one of the candidate modes of SPIPM_TR, and one of the candidate modes of SPIPM_BL may be used as four SPIPMs.
예를 들어, SPIPM_BR의 후보 모드 중 1개와 SPIPM_TR의 후보 모드 중 1개와 SPIPM_BL의 후보 모드 중 1개 SPIPM_BR의 후보 모드 중 1개를 4개의 SPIPM으로 이용할 수 있다.For example, one of the candidate modes of SPIPM_BR, one of the candidate modes of SPIPM_TR, and one of the candidate modes of SPIPM_BR may be used as four SPIPMs.
4개의 SPIPM이 채워지지 않은 경우 가용한 SPIPM을 이용하여 SPIPM 리스트를 채울 수 있다. 예컨대, SPIPM±delta를 이용하여 SPIPM 리스트를 채울 수 있다. 이때, delta는 임의의 양의 정수일 수 있으며 1, 2, 3,… 등의 값을 가질 수 있다.If four SPIPMs are not filled, the SPIPM list can be populated using the available SPIPMs. For example, SPIPM ± delta can be used to populate the SPIPM list. In this case, delta may be any positive integer and 1, 2, 3,... It can have a value such as.
4개의 SPIPM(SPIPM1, SPIPM2, SPIPM3, SPIPM4)이 결정되면, 수학식 13을 통해 h1, h2, h3, h4, h5, h6, h7, h8 에 관한 8개의 식을 생성하여 호모그래피 변환 모델의 파라미터들을 결정할 수 있다. 결정된 모델은 IPDF 생성을 위해 이용될 수 있다.When four SPIPMs (SPIPM1, SPIPM2, SPIPM3, SPIPM4) are determined, Equation 13 generates eight equations for h1, h2, h3, h4, h5, h6, h7, h8, and the parameters of the homography conversion model. Can decide. The determined model can be used for generating IPDF.
특정 변환 모델을 이용하여 IPDF를 생성한 후, 생성된 IPDF를 이용하여 현재 블록(WxH) 내 서브 블록들(KxL)의 화면 내 예측 모드를 할당할 수 있다. 이때, 서브 블록의 크기(granularity) KxL (K<=M인 양의 정수, L<=H인 양의 정수)은 현재 블록 크기보다 작거나 같은 고정 크기일 수 있다. 또는, 서브 블록의 크기는 현재 블록의 크기 및/또는 IPMD를 이용하여 적응적으로 결정할 수 있다. 또는, 서브 블록의 크기는 현재 블록의 크기와 동일할 수도 있다. After generating an IPDF using a specific transformation model, an intra prediction mode of sub blocks KxL in the current block WxH may be allocated using the generated IPDF. In this case, the granularity KxL (positive integer of K <= M, positive integer of L <= H) may be a fixed size smaller than or equal to the current block size. Alternatively, the size of the sub block may be adaptively determined using the size of the current block and / or IPMD. Alternatively, the size of the sub block may be the same as the size of the current block.
도 25는 현재 블록의 크기가 16x16일 경우, 서브 블록의 크기를 예시적으로 도시한 도면이다. FIG. 25 is a diagram exemplarily illustrating a size of a sub block when the size of a current block is 16 × 16.
도 25의 (a)에 도시된 바와 같이, 서브 블록의 크기는 8x8의 고정 크기일 수 있다. 또는, 도 25의 (b)에 도시된 바와 같이, 서브 블록의 크기는 4x4의 고정 크기일 수 있다. 또는, 도 25의 (c)에 도시된 바와 같이, 서브 블록의 크기는 2x2의 고정 크기일 수 있다. 또는, 도 25의 (c)에 도시된 바와 같이, 서브 블록의 크기는 1x1의 고정 크기일 수 있다. 이때, 1x1의 고정 크기는 샘플 단위일 수 있다.As shown in (a) of FIG. 25, the size of the sub block may be a fixed size of 8 × 8. Alternatively, as shown in FIG. 25B, the size of the sub block may be a fixed size of 4 × 4. Alternatively, as shown in FIG. 25C, the size of the sub block may be a fixed size of 2 × 2. Alternatively, as shown in FIG. 25C, the size of the sub block may be a fixed size of 1 × 1. In this case, the fixed size of 1 × 1 may be a sample unit.
예를 들어, 서브 블록의 크기는 현재 블록의 크기에 기반하여 결정될 수 있다. For example, the size of the sub block may be determined based on the size of the current block.
예를 들어, 서브 블록의 크기는 현재 블록의 SPIPM_TL, SPIPM_TR, SPIPM_BL 및 SPIPM_BR의 4개 IPMD 중 적어도 하나에 기반하여 결정될 수 있다. For example, the size of the sub block may be determined based on at least one of four IPMDs of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR of the current block.
*예를 들어, 서브 블록의 크기는 현재 블록의 크기 및 SPIPM_TL, SPIPM_TR, SPIPM_BL 및 SPIPM_BR의 4개 IPMD 중 적어도 하나에 기반하여 결정될 수 있다. For example, the size of the sub block may be determined based on the size of the current block and at least one of four IPMDs of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR.
서브 블록의 크기(granularity)는 비트스트림에 엔트로피 부호화/복호화될 수 있다. 이때, 상기 정보는 VPS(video parameter set), SPS(sequence parameter set), PPS(picture parameter set), APS(adaptation parameter set), 슬라이스(slice) 헤더, 타일(tile) 헤더, CTU 단위, CU 단위, PU 단위, TU 단위, 블록 단위, 서브 블록 단위 중 적어도 하나에서 엔트로피 부호화/복호화될 수 있다.The granularity of the sub-blocks may be entropy encoded / decoded in the bitstream. In this case, the information may include a video parameter set (VPS), a sequence parameter set (SPS), a picture parameter set (PPS), an adaptation parameter set (APS), a slice header, a tile header, a CTU unit, and a CU unit. , Entropy encoding / decoding may be performed in at least one of a PU unit, a TU unit, a block unit, and a sub block unit.
서브 블록의 크기(granularity)에 관한 정보는 전송되지 않고 현재 블록의 크기 및/또는 IPMD에 따라 적응적으로 부호화기/복호화기에서 유도될 수 있다. Information about the granularity of the sub-block may not be transmitted and may be adaptively derived from the encoder / decoder according to the size of the current block and / or IPMD.
또한, 서브 블록의 크기는 현재 블록의 부호화 파라미터 및 현재 블록의 주변 블록들의 부호화 파라미터 중 적어도 하나 이상에 기반하여 결정될 수 있다.In addition, the size of the sub block may be determined based on at least one of encoding parameters of the current block and encoding parameters of neighboring blocks of the current block.
결정된 IPDF를 이용하여 서브 블록들의 화면 내 예측 모드를 할당할 수 있다. 이때 각 서브 블록 내 특정 위치의 좌표를 결정된 IPDF 모델에 대입하여 해당 위치에서의 화면 내 예측 모드를 벡터값으로 획득할 수 있다. 이때 특정 위치는, 서브 블록 내 임의 픽셀의 위치 또는 서브 블록의 경계에 접하는 위치로 결정될 수 있다. 일 예로, 서브 블록의 좌상단, 우상단, 좌하단, 우하단, 중간위치 중 적어도 하나가 특정 위치로 결정될 수 있다. 서브 블록 내 특정 위치의 좌표를 (x, y)라고 하고 그 위치에서 IPDF를 통해 계산된 변환 좌표를 (x', y')이라 할 때, 벡터의 방향 θSB은 θSB
=atan[(y'-y)/(x'-x)]으로 결정될 수 있다. The determined IPDF may be used to allocate an intra prediction mode of sub blocks. In this case, the coordinates of a specific position in each subblock may be substituted into the determined IPDF model to obtain the intra prediction mode at the corresponding position as a vector value. In this case, the specific position may be determined as a position of an arbitrary pixel in the sub block or a position that contacts a boundary of the sub block. For example, at least one of the upper left, upper right, lower left, lower right, and intermediate positions of the sub block may be determined as a specific position. When the coordinate of a specific position in the subblock is called (x, y) and the transformed coordinate calculated through IPDF at that position is (x ', y'), the direction θ SB of the vector is θ SB = atan [(y'-y) / (x'-x)]].
도 26은 결정된 IPDF를 이용하여 화면 내 예측 모드를 할당하는 일 실시예를 설명하기 위한 도면이다.FIG. 26 illustrates an example of allocating an intra prediction mode using the determined IPDF.
도 26에 도시된 바와 같이, θSB
은 방향성 모드 중 가장 유사한 방향의 화면 내 예측 모드로 매핑될 수 있다. θSB
의 화면 내 예측 모드로의 매핑은 LUT(Look-Up Table)을 이용할 수 있다. As shown in FIG. 26, θ SB May be mapped to the intra prediction mode in the direction most similar to the directional mode. θ SB The mapping to the intra prediction mode may use a look-up table (LUT).
또한, 상기 IPDF를 이용하여 서브 블록들의 화면 내 예측 모드를 할당할 때, IPDF를 최근접 이웃(nearest neighbor) 방법에 기반하여 서브 블록들의 화면 내 예측 모드를 할당할 수 있다.In addition, when the intra prediction mode of the subblocks is allocated using the IPDF, the intra prediction mode of the subblocks may be allocated to the IPDF based on a neighbor neighbor method.
또한, 상기 IPDF를 이용하여 서브 블록들의 화면 내 예측 모드를 할당할 때, IPDF를 정수 형태로 양자화하여 서브 블록들의 화면 내 예측 모드를 할당할 수 있다.In addition, when the intra prediction mode of the sub blocks is allocated using the IPDF, the intra prediction mode of the sub blocks may be allocated by quantizing the IPDF in an integer form.
또한, 상기 IPDF를 이용하여 서브 블록들의 화면 내 예측 모드를 할당할 때, IPDF를 정수로 반올림하여 서브 블록들의 화면 내 예측 모드를 할당할 수 있다.When the intra prediction mode of the sub blocks is allocated using the IPDF, the intra prediction mode of the sub blocks may be allocated by rounding the IPDF to an integer.
변환 모델을 이용한 서브 블록 단위의 화면 내 예측을 위해 추가적으로 비트스트림에 엔트로피 부호화/복호화해야 하는 정보들은 다음 중 적어도 하나를 포함할 수 있다.The information to be additionally entropy coded / decoded in the bitstream for intra-picture prediction using a transform model may include at least one of the following.
현재 블록에 대해, 변환 모델을 이용한 서브 블록 단위 화면 내 예측이 수행되었는지 지시하는 정보: TBIP_flagInformation indicating whether intra-unit prediction within the sub-block unit using the transform model is performed for the current block: TBIP_flag
이때, 상기 TBIP_flag는 현재 블록의 화면 내 예측 모드 및 현재 블록에 인접한 복원 블록들 중 화면 내 예측을 이용하여 부호화/복호화된 블록들의 화면 내 예측 모드들 중 적어도 하나 이상을 이용하여 서브 블록 단위의 화면 내 예측 모드를 유도할지에 대한 정보일 수 있다.In this case, the TBIP_flag is a picture of a sub-block unit using at least one of an intra prediction mode of a current block and intra prediction modes of blocks encoded / decoded using intra prediction among reconstructed blocks adjacent to the current block. Information about whether to derive my prediction mode.
사용된 SPIPM 셋(set)을 알려주는 index: SPIPM_idxIndex indicating the SPIPM set used: SPIPM_idx
이하, 변환 모델을 이용하여 서브 블록 단위의 화면 내 예측 모드를 유도하는 다른 실시예를 설명한다. 예컨대, 인접한 복원 블록들 중 변환 모델을 이용한 서브 블록 단위의 화면 내 예측을 수행하여 부호화/복호화된 블록이 있는 경우, 현재 블록의 IPDF를 직접 생성하는 대신 인접 블록의 IPDF 모델을 이용하여, 서브 블록 단위의 화면 내 예측 모드를 유도할 수 있다. Hereinafter, another embodiment of deriving an intra prediction mode on a sub-block basis using a transform model will be described. For example, if there is an encoded / decoded block by performing intra prediction on a sub-block basis using a transform model among adjacent reconstructed blocks, instead of generating an IPDF of the current block directly, the sub-block is used by using the IPDF model of the adjacent block. Intra prediction mode of a unit can be derived.
현재 블록의 인접 복원 블록들 중 변환 모델을 이용한 서브 블록 단위의 화면 내 예측을 수행하여 부호화/복호화된 블록이 있는지 확인하기 위해 기 정의된 스캐닝 순서를 따를 수 있다. 이때, 스캐닝 순서는 적어도 아래 중 하나일 수 있다.In order to determine whether there is an encoded / decoded block by performing intra prediction on a sub-block basis using a transform model among neighboring reconstructed blocks of the current block, a predefined scanning order may be followed. In this case, the scanning order may be at least one of the following.
도 27은 현재 블록의 인접 복원 블록들을 예시적으로 도시한 도면이다.27 is a diagram exemplarily illustrating adjacent reconstructed blocks of a current block.
예를 들어, 도 27에서 A -> B -> C -> D -> E의 순서로 스캐닝을 수행할 수 있다. 또는, A -> B -> D -> C -> E의 순서로 스캐닝을 수행할 수 있다. 또는, B -> A -> D -> C -> E의 순서로 스캐닝을 수행할 수 있다. 또는, E -> A -> B -> C -> D의 순서로 스캐닝을 수행할 수 있다. 또는, 상기 순서 이외의 순서로 스캐닝을 수행할 수 있다. For example, scanning may be performed in the order of A-> B-> C-> D-> E in FIG. Alternatively, scanning may be performed in the order of A-> B-> D-> C-> E. Alternatively, scanning may be performed in the order of B-> A-> D-> C-> E. Alternatively, scanning may be performed in the order of E-> A-> B-> C-> D. Alternatively, scanning may be performed in an order other than the above.
또는, 상기 A, B, C, D, C 블록들의 일부는 스캐닝에서 제외될 수 있다. 또는, 상기 A, B, C, D, C 블록들 이외의 블록들이 스캐닝될 수 있다. 상기 스캐닝의 대상이 되는 인접 복원 블록들은 인접 복원 블록들 및 현재 블록 중 적어도 하나의 크기, 형태 및 본 명세서에서 언급된 부호화 파라미터 중 적어도 하나에 기초하여 결정될 수 있다.Alternatively, some of the A, B, C, D, and C blocks may be excluded from scanning. Alternatively, blocks other than the A, B, C, D, and C blocks may be scanned. The adjacent reconstruction blocks that are the target of the scanning may be determined based on at least one of a size, a shape of at least one of the adjacent reconstruction blocks and the current block, and encoding parameters mentioned herein.
도 28은 인접 복원 블록들을 이용하여 화면 내 예측 모드를 유도하는 실시예를 설명하기 위한 도면이다.FIG. 28 is a diagram for describing an embodiment of deriving an intra prediction mode using adjacent reconstruction blocks.
도 28에 도시된 예에서, 현재 블록의 인접 복원 블록은 A블록이 변환 모델을 이용한 서브 블록 단위의 화면 내 예측으로 부호화/복호화된 경우, A블록의 SPIPM_A_TL, SPIPM_A_TR, SPIPM_A_BL 및 SPIPM_A_BR 중 적어도 하나를 이용하여 A블록의 IPDF를 생성할 수 있다. In the example shown in FIG. 28, when the A block is encoded / decoded by intra-block prediction in sub-block units using a transform model, at least one of SPIPM_A_TL, SPIPM_A_TR, SPIPM_A_BL, and SPIPM_A_BR of the A block is selected. Can be used to generate an IPDF of the A block.
생성된 A블록의 IPDF를 이용하여 현재 블록의 SPIPM_Cur_TL, SPIPM_Cur_TR, SPIPM_Cur_BL 및 SPIPM_Cur_BR 중 적어도 하나를 유도할 수 있고, 이를 이용하여 현재 블록의 IPDF를 생성함으로써, 서브 블록 단위의 화면 내 예측을 수행할 수 있다.The IPDF of the generated A block may be used to derive at least one of SPIPM_Cur_TL, SPIPM_Cur_TR, SPIPM_Cur_BL, and SPIPM_Cur_BR of the current block, and generate an IPDF of the current block, thereby performing intra prediction on a sub-block basis. have.
현재 블록의 인접 복원 블록들 중 적어도 하나의 블록이 IPDF를 이용하여 부호화/복호화된 블록인 경우, 현재 블록의 IPDF는 해당 인접 복원 블록의 IPDF를 이용하여 유도될 수 있다. 또한 TBIP_flag 정보가 엔트로피 부호화/복호화될 수 있다.If at least one of the neighbor reconstruction blocks of the current block is a block encoded / decoded using IPDF, the IPDF of the current block may be derived using the IPDF of the corresponding neighbor reconstruction block. In addition, TBIP_flag information may be entropy encoded / decoded.
이하, 등간격(Equal-space) 모델을 이용하여 서브 블록 단위의 화면 내 예측 모드를 유도하는 또 다른 실시예를 설명한다. Hereinafter, another embodiment of deriving an intra prediction mode in sub-block units using an equal-space model will be described.
도 29는 서브 블록 단위의 화면 내 예측 모드를 유도하는 실시예를 설명하기 위한 도면이다.FIG. 29 is a diagram for describing an embodiment of deriving an intra prediction mode on a sub-block basis.
등간격 모델을 사용하는 경우 적어도 2개의 SPIPM이 필요할 수 있다. 일 예로, 도 29의 (a)에 도시된 바와 같이, SPIPM_TL의 후보 모드 중 1개, SPIPM_TR의 후보 모드 중 1개, SPIPM_BL의 후보 모드 중 1개, SPIPM_BR의 후보 모드 중 1개를 선택해 총 4개를 선택할 수 있다. 선택된 4개의 SPIPM 후보 모드들은, 도 24에 도시된 바와 같이, IPMD 값의 합이 작은 순서대로 차례로 SPIPM 리스트를 채울 수 있다. At least two SPIPMs may be required when using equidistant models. For example, as shown in (a) of FIG. 29, one of the candidate modes of the SPIPM_TL, one of the candidate modes of the SPIPM_TR, one of the candidate modes of the SPIPM_BL, and one of the candidate modes of the SPIPM_BR are selected and a total of four are selected. You can choose a dog. The four selected SPIPM candidate modes may populate the SPIPM list in order of decreasing sum of IPMD values, as shown in FIG. 24.
SPIPM_TL, SPIPM_TR, SPIPM_BL 및/또는 SPIPM_BR을 이용해서 현재 블록의 가장 바깥쪽에 위치한 서브 블록들의 화면 내 예측 모드들이 우선적으로 결정될 수 있다. 이때, 등간격으로 화면 내 예측 모드를 결정한다는 것은 적어도 2개의 화면 내 예측 모드를 이용해서 상기 화면 내 예측 모드의 값을 등간격으로 나누어 서브 블록에 할당하는 것을 의미할 수 있다.Intra-prediction modes of sub-blocks located at the outermost side of the current block may be preferentially determined using SPIPM_TL, SPIPM_TR, SPIPM_BL and / or SPIPM_BR. In this case, determining the intra prediction mode at equal intervals may mean that the intra prediction modes are divided into equal intervals and allocated to sub blocks using at least two intra prediction modes.
예를 들어, 도 29의 (a)에 도시된 예에서, SPIPM_TL이 24이고 SPIPM_TR이 21일 때, 서브 블록 A, B, C, D의 화면 내 예측 모드는 SPIPM_TL과 SPIPM_TR의 값을 이용하여 등간격으로 결정될 수 있다. 예컨대, 도 29의 (b)에 도시된 바와 같이, 서브 블록 A = 24, B = 23, C = 22, D = 21로 결정될수 있다. For example, in the example shown in (a) of FIG. 29, when SPIPM_TL is 24 and SPIPM_TR is 21, the intra prediction modes of sub-blocks A, B, C, and D use the values of SPIPM_TL and SPIPM_TR, and the like. Can be determined at intervals. For example, as shown in FIG. 29B, it may be determined that subblocks A = 24, B = 23, C = 22, and D = 21.
예를 들어, 도 29의 (a)에 도시된 예에서, SPIPM_TL이 25이고 SPIPM_BL이 38일 때, 서브 블록 A, E, I, M의 화면 내 예측 모드는 SPIPM_TL과 SPIPM_BL의 값을 이용하여 등간격으로 결정될 수 있다. 예컨대, 도 29의 (b)에 도시된 바와 같이, 서브 블록 A = 24, E = 29, I = 34, M = 38로 결정될수 있다.For example, in the example shown in (a) of FIG. 29, when SPIPM_TL is 25 and SPIPM_BL is 38, the intra prediction modes of sub-blocks A, E, I, and M are performed using the values of SPIPM_TL and SPIPM_BL, and so on. Can be determined at intervals. For example, as shown in FIG. 29B, it may be determined that subblocks A = 24, E = 29, I = 34, and M = 38.
예를 들어, 도 29의 (a)에 도시된 예에서, SPIPM_BL이 38이고 SPIPM_BR이 35일 때, 서브 블록 M, N, O, P의 화면 내 예측 모드는 SPIPM_BL과 SPIPM_BR의 값을 이용하여 등간격으로 결정될 수 있다. 예컨대, 도 29의 (b)에 도시된 바와 같이, 서브 블록 M = 38, N = 37, O = 36, P = 35로 결정될수 있다.For example, in the example shown in (a) of FIG. 29, when SPIPM_BL is 38 and SPIPM_BR is 35, the intra prediction modes of the sub-blocks M, N, O, and P are obtained by using the values of SPIPM_BL and SPIPM_BR, and the like. Can be determined at intervals. For example, as shown in (b) of FIG. 29, it may be determined as subblocks M = 38, N = 37, O = 36, and P = 35.
예를 들어, 도 29의 (a)에 도시된 예에서, SPIPM_TR이 21이고 SPIPM_BR이 35일 때, 서브 블록 D, H, I, P의 화면 내 예측 모드는 SPIPM_TR과 SPIPM_BR의 값을 이용하여 등간격으로 결정될 수 있다. 예컨대, 도 29의 (b)에 도시된 바와 같이, D = 21, H = 26, I = 31, P = 35가 될수 있다.For example, in the example shown in (a) of FIG. 29, when SPIPM_TR is 21 and SPIPM_BR is 35, the intra prediction modes of sub-blocks D, H, I, and P are performed using the values of SPIPM_TR and SPIPM_BR, and the like. Can be determined at intervals. For example, as shown in FIG. 29B, D = 21, H = 26, I = 31, and P = 35.
현재 블록의 가장 바깥쪽에 위치한 서브 블록들의 화면 내 예측 모드가 모두 결정된 후, 두 번째 바깥쪽에 위치한 서브 블록들의 화면 내 예측 모드가 결정될 수 있다. 도 29에 도시된 예에서, 상기 두 번째 바깥쪽에 위치한 서브 블록들은 서브 블록 F, G, J, K일 수 있다. 이때, SPIPM_TL은 두 번째 바깥쪽 서브 블록 중 좌상단 서브 블록(도 29의 (a)에서 서브 블록 F)의 좌상단 위치의 모드(도 29의 (a)에서 서브 블록 A의 모드)값으로 재설정될 수 있다. 또한, SPIPM_TR은 두번째 바깥쪽 서브 블록 중 우상단 서브 블록(도 29의 (a)에서 서브 블록 G)의 우상단 위치의 모드(도 29의 (a)에서 서브 블록 D의 모드)값으로 재설정될 수 있다. 또한, SPIPM_BL은 두번째 바깥쪽 서브 블록 중 좌하단 서브 블록(도 29의 (a)에서 서브 블록 J)의 좌하단 위치의 모드(도 29의 (a)에서 서브 블록 M의 모드)값으로 재설정될 수 있다. 또한, SPIPM_BR은 두번째 바깥쪽 서브 블록 중 우하단 서브 블록(도 29의 (a)에서 서브 블록 K)의 우하단 위치의 모드(도 29의 (a)에서 서브 블록 P의 모드)값으로 재설정될 수 있다. 이러한 과정은 현재 블록 내의 모든 서브 블록들의 모드가 결정될 때까지 재귀적으로 반복될 수 있다.After all the intra prediction modes of the sub blocks positioned at the outermost side of the current block are determined, the intra prediction modes of the second outer sub blocks may be determined. In the example shown in FIG. 29, the second outer sub blocks may be sub blocks F, G, J, and K. At this time, SPIPM_TL may be reset to the mode (mode of subblock A in FIG. 29A) of the upper left position of the upper left subblock (subblock F in FIG. 29A) of the second outer subblock. have. Also, SPIPM_TR may be reset to a mode (mode of subblock D in FIG. 29A) of the upper right position of the upper right subblock (subblock G in FIG. 29A) of the second outer subblock. . Further, SPIPM_BL may be reset to the mode (mode of subblock M in FIG. 29A) in the lower left position of the lower left subblock (subblock J in FIG. 29A) of the second outer subblock. Can be. In addition, SPIPM_BR is reset to the mode (mode of subblock P in FIG. 29A) of the lower right position of the lower right subblock (subblock K in FIG. 29A) of the second outer subblock. Can be. This process may be repeated recursively until the mode of all subblocks in the current block is determined.
예를 들어, 도 29의 (b)에 도시된 예에서, SPIPM_TL이 24이고 SPIPM_TR이 21일 때, 서브 블록 F, G의 화면 내 예측 모드는 SPIPM_TL과 SPIPM_TR의 값을 이용하여 등간격으로 결정될 수 있다. 예컨대, 도 29의 (c)에 도시된 바와 같이, 서브 블록 F = 24, G = 21로 결정될 수 있다. For example, in the example shown in (b) of FIG. 29, when SPIPM_TL is 24 and SPIPM_TR is 21, the intra prediction modes of sub-blocks F and G may be determined at equal intervals using the values of SPIPM_TL and SPIPM_TR. have. For example, as shown in (c) of FIG. 29, it may be determined as subblocks F = 24 and G = 21.
예를 들어, 도 29의 (b)에 도시된 예에서, SPIPM_BL이 38이고 SPIPM_BR이 35일 때, 서브 블록 J, K의 화면 내 예측 모드는 SPIPM_TL과 SPIPM_TR의 값을 이용하여 등간격으로 결정될 수 있다. 예컨대, 도 29의 (c)에 도시된 바와 같이, 서브 블록 J = 38, K = 35로 결정될 수 있다. For example, in the example shown in (b) of FIG. 29, when SPIPM_BL is 38 and SPIPM_BR is 35, the intra prediction modes of sub-blocks J and K may be determined at equal intervals using the values of SPIPM_TL and SPIPM_TR. have. For example, as shown in (c) of FIG. 29, it may be determined as subblocks J = 38 and K = 35.
등간격 모델을 이용한 서브 블록 단위의 화면 내 예측을 위해 추가적으로 엔트로피 부호화/복호화해야 하는 정보들은 다음 중 적어도 하나 이상일 수 있다. Information to be additionally entropy encoded / decoded for intra prediction on a sub-block basis using an equal interval model may be at least one of the following.
현재 블록에 대해 등간격 모델을 이용한 서브 블록 단위의 화면 내 예측 모드의 유도가 수행되었는지 여부를 지시하는 정보: ES_flagInformation indicating whether derivation of the intra prediction mode in sub-block units using the equal interval model is performed on the current block: ES_flag
사용된 SPIPM 셋(set)을 알려주는 인덱스: SPIPM_idxIndex indicating SPIPM set used: SPIPM_idx
이하, 양선형 필터(Bilinear filter) 모델을 이용하여 서브 블록 단위의 화면 내 예측 모드를 유도하는 또 다른 실시예를 설명한다. Hereinafter, another embodiment of deriving an intra prediction mode in sub-block units using a bilinear filter model will be described.
도 30은 서브 블록 단위의 화면 내 예측 모드를 유도하는 다른 실시예를 설명하기 위한 도면이다.FIG. 30 is a diagram for describing another embodiment of deriving an intra prediction mode on a sub-block basis.
양선형 필터 모델을 이용하여 서브 블록 단위의 화면 내 예측 모드를 결정하기 위해 적어도 2개의 SPIPM이 필요할 수 있다. 일 예로, 도 30의 (a)에 도시된 바와 같이, SPIPM_TL의 후보 모드 중 1개, SPIPM_TR의 후보 모드 중 1개, SPIPM_BL의 후보 모드 중 1개, SPIPM_BR의 후보 모드 중 1개를 선택해 총 4개를 선택할 수 있다. 선택된 4개의 SPIPM 후보 모드들은, 도 24에 도시된 바와 같이, IPMD 값의 합이 작은 순서대로 차례로 SPIPM 리스트를 채울 수 있다.At least two SPIPMs may be needed to determine the intra prediction mode in sub-block units using the bilinear filter model. For example, as shown in (a) of FIG. 30, one of the candidate modes of the SPIPM_TL, one of the candidate modes of the SPIPM_TR, one of the candidate modes of the SPIPM_BL, and one of the candidate modes of the SPIPM_BR are selected and a total of four are selected. You can choose a dog. The four selected SPIPM candidate modes may populate the SPIPM list in order of decreasing sum of IPMD values, as shown in FIG. 24.
현재 블록 내 좌상단 서브 블록(도 30의 (a)에서 서브 블록 A)의 모드는 SPIPM_TL 값으로 결정될 수 있다. 또한, 우상단 서브 블록(도 30의 (a)에서 서브 블록 D)의 모드는 SPIPM_TR 값으로 결정될 수 있다. 또한, 좌하단 서브 블록(도 30의 (a)에서 서브 블록 M)의 모드는 SPIPM_BL 값으로 결정될 수 있다. 또한, 우하단 서브 블록(도 30의 (a)에서 서브 블록 P)의 모드는 SPIPM_BR 값으로 결정될 수 있다. 도 30의 (b)에 도시된 바와 같이, 현재 블록 내의 좌상단, 우상단, 좌하단 및 우하단 서브 블록의 화면 내 예측 모드는 각각 SPIPM_TL, SPIPM_TR, SPIPM_BL 및 SPIPM_BR 값으로 결정될 수 있다. 그러나, 이에 한정되지 않으며, 현재 블록 내의 좌상단, 우상단, 좌하단 및 우하단 서브 블록의 화면 내 예측 모드 중 적어도 하나는 SPIPM_TL, SPIPM_TR, SPIPM_BL 및 SPIPM_BR 값 중 적어도 하나로 결정될 수 있다.The mode of the upper left subblock in the current block (subblock A in FIG. 30A) may be determined by the SPIPM_TL value. In addition, the mode of the upper right subblock (subblock D in FIG. 30A) may be determined by the SPIPM_TR value. In addition, the mode of the lower left subblock (subblock M in FIG. 30A) may be determined by the SPIPM_BL value. In addition, the mode of the lower right subblock (subblock P in FIG. 30A) may be determined by the SPIPM_BR value. As shown in (b) of FIG. 30, the intra prediction modes of the upper left, upper right, lower left and lower right sub-blocks in the current block may be determined by SPIPM_TL, SPIPM_TR, SPIPM_BL and SPIPM_BR values, respectively. However, the present invention is not limited thereto, and at least one of intra prediction modes of the upper left, upper right, lower left and lower right sub-blocks in the current block may be determined by at least one of SPIPM_TL, SPIPM_TR, SPIPM_BL, and SPIPM_BR.
그 외 서브 블록들의 화면 내 예측 모드는 양선형 필터 기법을 이용해서 결정될 수 있다. 예컨대, 아래의 수학식 14가 이용될 수 있다. 수학식 14에서, function()은 floor() 또는 ceil() 또는 round() 중 적어도 하나가 될 수 있다. 도 30에 도시된 예에서는, function()이 round()일 수 있다. 또한, 수학식 14에서, # of SubBlk in wdt는 현재 블록의 가로 방향의 서브 블록의 개수를 의미할 수 있다. 마찬가지로, # of SubBlk in hgt는 현재 블록의 세로 방향의 서브 블록의 개수를 의미할 수 있다.The intra prediction mode of the other subblocks may be determined using a bilinear filter technique. For example, Equation 14 below may be used. In Equation 14, function () may be at least one of floor (), ceil (), or round (). In the example shown in FIG. 30, function () may be round (). Also, in Equation 14, # of SubBlk in wdt may mean the number of sub blocks in a horizontal direction of the current block. Similarly, # of SubBlk in hgt may mean the number of sub blocks in the vertical direction of the current block.

예를 들어, 도 30의 (c)에 도시된 바와 같이, 나머지 서브 블록들의 화면 내 예측 모드는 는 상기 수학식 14를 이용하여 결정될 수 있다.For example, as illustrated in (c) of FIG. 30, the intra prediction mode of the remaining subblocks may be determined using Equation 14 above.
양선형 필터 모델을 이용한 서브 블록 단위의 화면 내 예측을 위해 추가적으로 엔트로피 부호화/복호화해야 하는 정보들은 다음 중 적어도 하나 이상일 수 있다. Information to be additionally entropy encoded / decoded for intra prediction in sub-block units using a bilinear filter model may be at least one or more of the following.
현재 블록 에 대해 양선형 필터 모델을 이용한 서브 블록 단위의 화면 내 예측 모드의 유도가 수행되었는지 여부를 지시하는 정보: BF_flagInformation indicating whether derivation of intra prediction mode in sub-block units using a bilinear filter model is performed on the current block: BF_flag
사용된 SPIPM 셋을 알려주는 인덱스: SPIPM_idxIndex indicating SPIPM set used: SPIPM_idx
상기 현재 블록의 화면 내 예측 모드 및 현재 블록에 인접한 복원 블록들 중 화면 내 예측을 이용하여 부호화/복호화된 블록들의 화면 내 예측 모드들 중 적어도 하나 이상을 이용하여 서브 블록 별로 화면 내 예측 모드가 유도되고, 유도된 화면 내 예측 모드를 이용하여 서브 블록 단위로 화면 내 예측이 수행될 수 있다. 이때, 서브 블록 단위로 이전에 부호화/복호화된 서브 블록에 포함된 샘플은 이후 서브 블록 단위의 화면 내 예측을 위한 참조 샘플로 사용될 수 있다. An intra prediction mode is derived for each sub-block by using at least one of the intra prediction mode of the current block and the intra prediction modes of blocks encoded / decoded using intra prediction among reconstructed blocks adjacent to the current block. Intra-prediction may be performed on a sub-block basis using the derived intra-prediction mode. In this case, a sample included in a subblock previously encoded / decoded in subblock units may be used as a reference sample for intra prediction in subblock units.
부호화기에서는 서브 블록 단위로 화면 내 예측을 수행한 후 생성되는 잔여 블록에 대해서 1차 변환, 2차 변환, 양자화 중 적어도 하나를 수행하여 변환 계수를 생성할 수 있다. 생성된 변환 계수는 엔트로피 부호화될 수 있다. 1차 변환, 2차 변환, 양자화는 현재 블록에 대해 수행될 수도 있고, 서브 블록 단위로 수행될 수도 있다. 일 예로, 현재 블록 전체에 대해 1차 변환, 2차 변환, 양자화 중 적어도 하나가 수행될 수도 있고, 서브 블록 별로 1차 변환, 2차 변환, 양자화 중 적어도 하나가 수행될 수도 있다. 이때, 현재 블록 또는 서브 블록에 대해 1차 변환, 2차 변환, 양자화 중 아무것도 수행되지 않을 수도 있다.The encoder may generate transform coefficients by performing at least one of a first-order transform, a second-order transform, and quantization on the residual block generated after performing intra prediction on a sub-block basis. The generated transform coefficients may be entropy coded. Primary transform, secondary transform, and quantization may be performed on the current block or may be performed on a sub-block basis. For example, at least one of the first transform, the second transform, and the quantization may be performed for the entire current block, or at least one of the first transform, the second transform, and the quantization may be performed for each subblock. At this time, none of the first-order transform, second-order transform, and quantization may be performed on the current block or subblock.
복호화기에서는 변환 계수가 엔트로피 복호화될 수 있다. 엔트로피 복호화된 변환 계수에 대해 역양자화, 1차 역변환, 2차 역변환 중 적어도 하나를 수행하여 복원된 잔여 블록을 생성할 수 있다. 1차 변환, 2차 변환, 양자화는 현재 블록에 대해 수행될 수도 있고, 서브 블록 단위로 수행될 수도 있다. 일 예로, 현재 블록 전체에 대해 1차 변환, 2차 변환, 양자화 중 적어도 하나가 수행될 수도 있고, 서브 블록 별로 1차 변환, 2차 변환, 양자화 중 적어도 하나가 수행될 수도 있다. 이때, 현재 블록 또는 서브 블록에 대해 1차 변환, 2차 변환, 양자화 중 아무것도 수행되지 않을 수도 있다.In the decoder, the transform coefficients may be entropy decoded. The reconstructed residual block may be generated by performing at least one of inverse quantization, first order inverse transform, and second order inverse transform on the entropy decoded transform coefficient. Primary transform, secondary transform, and quantization may be performed on the current block or may be performed on a sub-block basis. For example, at least one of the first transform, the second transform, and the quantization may be performed for the entire current block, or at least one of the first transform, the second transform, and the quantization may be performed for each subblock. At this time, none of the first-order transform, second-order transform, and quantization may be performed on the current block or subblock.
화면 내 예측에 관한 정보는 비트스트림으로부터 엔트로피 부호화/복호화될 수 있다. 도 31은 화면 내 예측 모드에 관한 정보를 포함하는 신택스 구조를 예시한 도면이다. 도 31에 도시된 바와 같이, 화면 내 예측에 관한 정보는 아래의 정보들 중 적어도 하나 이상을 포함할 수 있다. 이때, 상기 화면 내 예측에 관한 정보는 VPS(video parameter set), SPS(sequence parameter set), PPS(picture parameter set), APS(adaptation parameter set), 슬라이스(slice) 헤더, 타일(tile) 헤더 중 적어도 하나를 통하여 시그널링 될 수 있다.Information about intra prediction may be entropy encoded / decoded from the bitstream. 31 is a diagram illustrating a syntax structure including information about an intra prediction mode. As illustrated in FIG. 31, the information about the intra prediction may include at least one or more of the following information. In this case, the information about the intra prediction may be selected from among a video parameter set (VPS), a sequence parameter set (SPS), a picture parameter set (PPS), an adaptation parameter set (APS), a slice header, and a tile header. It may be signaled through at least one.
MPM(Most Probable Mode) 매칭 여부를 나타내는 플래그: 예) prev_intra_luma_pred_flagFlag indicating whether or not Most Probable Mode (MPM) is matched, eg prev_intra_luma_pred_flag
MPM 리스트 내에서 위치를 지정해주는 색인: 예) mpm_idxIndex specifying position in MPM list: ex) mpm_idx
휘도 성분 화면내 예측 모드 정보: 예) rem_intra_luma_pred_modePrediction mode information in luminance component screen: ex) rem_intra_luma_pred_mode
색차 성분 화면내 예측 모드 정보: 예) intra_chroma_pred_modePrediction mode information in chrominance component screen: ex) intra_chroma_pred_mode
곡선형 화면 내 예측 모드의 곡률 파라미터: 예) cuvCurvature parameter of prediction mode in curved screen: ex) cuv
곡선형 화면 내 예측 모드의 가중치 파라미터: 예) cw1, cw2, … , cwNs-1Weight parameter of prediction mode in curved screen: ex) cw1, cw2,... , cwNs-1
곡선형 화면 내 예측을 위한 Look-up-table(LUT)Look-up-table (LUT) for curved intra prediction
주변 블록의 화면 내 예측 모드를 이용하여 현재 블록 및 서브 블록의 화면 내 예측 모드를 유도함을 나타내는 플래그: 예) NDIP_flagA flag indicating that the intra prediction mode of the current block and the sub block is derived using the intra prediction mode of the neighboring block: ex) NDIP_flag
잔차 신호 예측을 수행할지 여부를 나타내는 플래그: 예) SRP_flagFlag indicating whether to perform residual signal prediction: ex) SRP_flag
N개의 MPM 리스트를 이용하여, 현재 블록의 화면 내 예측 모드를 유도하거나, 현재 블록의 화면 내 예측 모드를 엔트로피 부호화/복호화할 때, 상기 N개의 MPM 리스트 별로 각 MPM 리스트에 포함된 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 존재하는지 여부를 나타내는 지시자(MPM flag): 예) MPM_FLAG_1, MPM_FLAG_2, …, MPM_FLAG_NIntra prediction mode included in each MPM list for each of the N MPM lists when deriving the intra prediction mode of the current block using the N MPM lists or entropy encoding / decoding the intra prediction mode of the current block. Among them, an indicator (MPM flag) indicating whether or not the same intra prediction mode as the intra prediction mode of the current block exists (eg, MPM_FLAG_1, MPM_FLAG_2,... , MPM_FLAG_N
상기 N개의 MPM 리스트 중 특정 MPM 리스트에 포함된 화면 내 예측 모드들 중 현재 블록의 화면 내 예측 모드와 동일한 화면 내 예측 모드가 존재할 경우, 해당 화면 내 예측 모드가 특정 MPM 리스트 내 존재하는 위치 혹은 순서에 대한 색인(index) 정보: 예) MPM_IDX_1, MPM_IDX_2, …, MPM_IDX_NIf there are intra prediction modes that are identical to the intra prediction modes of the current block among the intra prediction modes included in the specific MPM list among the N MPM lists, the position or order in which the intra prediction modes exist in the specific MPM list Index information for: eg MPM_IDX_1, MPM_IDX_2,… , MPM_IDX_N
현재 블록에 대해 변환 모델을 이용한 서브 블록 단위의 화면 내 예측이 수행되었는지 지시하는 정보 및 사용된 SPIPM 셋을 알려주는 인덱스: 예) TBIP_flag, SPIPM_idxIndex indicating the SPIPM set used and information indicating whether intra-picture prediction has been performed on a sub-block basis using the transform model for the current block: ex) TBIP_flag, SPIPM_idx
현재 블록에 대해 등간격 모델을 이용한 서브 블록 단위의 화면 내 예측 모드의 유도가 수행되었는지 여부를 지시하는 정보 및 사용된 SPIPM 셋을 알려주는 인덱스: ES_flag, SPIPM_idxInformation indicating whether the derivation of the intra prediction mode in the sub-block unit using the equal interval model is performed for the current block and the index indicating the SPIPM set used: ES_flag, SPIPM_idx
현재 블록에 대해 양선형 필터 모델을 이용한 서브 블록 단위의 화면 내 예측 모드의 유도가 수행되었는지 여부를 지시하는 정보 및 사용된 SPIPM 셋을 알려주는 인덱스: BF_flag, SPIPM_idxInformation indicating whether derivation of the intra prediction mode in sub-block units using the bilinear filter model is performed on the current block, and an index indicating the SPIPM set used: BF_flag and SPIPM_idx
상기 MPM (Most Probable Mode) flag가 1인 경우, 휘도 성분의 화면 내 예측 모드는 MPM 색인(mpm
_
idx
) 을 이용하여 이미 부호화/복호화된 인접 유닛들의 화면 내 모드들을 포함하는 후보 모드들로부터 유도될 수 있다. The MPM (Most Probable Mode) If the flag is 1, the intra prediction mode of the luminance component is derived from the candidate modes, including my mode MPM index (mpm _ idx) the use of the screen of the already encoded / decoded adjacent units Can be.
상기 MPM (Most Probable Mode) flag가 0인 경우, 휘도 성분의 화면 내 예측 모드는 휘도 성분에 대한 화면 내 예측 모드 정보(rem_
intra
_
luma
_
pred
_mode)를 이용하여 부호화/복호화될 수 있다.If the MPM of (Most Probable Mode) flag is 0, the intra-prediction mode of the luminance component may be encoded / decoded using the intra prediction mode information (rem_ intra luma _ _ pred _mode) for the luminance component.
색차 성분의 화면 내 예측 모드는, 색차 성분에 대한 화면 내 예측 모드 정보(intra_chroma_pred_mode) 및/또는 대응하는 휘도 성분 블록에 대한 화면 내 예측 모드를 이용하여 부호화/복호화될 수 있다. The intra prediction mode of the chrominance component may be encoded / decoded using the intra prediction mode information ( intra_chroma_pred_mode) for the chrominance component and / or the intra prediction mode for the corresponding luminance component block.
곡선형 화면 내 예측 모드는 예측 블록 내 화소의 위치 (x, y)에 따라 상이한 각도의 참조 화소를 이용하여 화소 예측값을 유도할 수 있다. 예측 블록 내 화소들은 복수 개의 그룹으로 그룹핑될 수 있고, 제1 그룹은 제2 그룹과 상이한 각도를 가진 방향성 화면 내 예측 모드를 이용할 수 있다. 각 그룹은 하나 또는 그 이상의 화소를 포함할 수 있다. 각 그룹은 삼각형, 사각형, 기타 기하학적인 형태를 가질 수 있다.The prediction mode in the curved screen may derive the pixel prediction value using reference pixels of different angles according to the position (x, y) of the pixel in the prediction block. The pixels in the prediction block may be grouped into a plurality of groups, and the first group may use an intra prediction mode having an angle different from that of the second group. Each group may include one or more pixels. Each group can have triangles, squares, and other geometric shapes.
상기 곡선형 화면 내 예측 모드의 곡률 파라미터(cuv)는, 곡선형 화면 내 예측 모드에 적용되는 곡률을 의미할 수 있다. 현재 블록에 대해 1개 이상의 cuv를 이용하여 곡선형 화면 내 예측을 수행할 수 있다. 곡률 파라미터는 주변 블록들의 곡률 파라미터들 중 적어도 하나의 곡률 파라미터(들)로부터 유도될 수 있다. The curvature parameter cuv of the prediction mode within the curved screen may mean a curvature applied to the prediction mode within the curved screen. Curved intra prediction may be performed using one or more cuv for the current block. The curvature parameter may be derived from the curvature parameter (s) of at least one of the curvature parameters of the neighboring blocks.
상기 곡선형 화면 내 예측 모드의 가중치 파라미터(cw)는 현재 블록에 대해 하나 또는 그 이상의 복수 개가 적용될 수 있다. 복수 개의 가중치 파라미터가 적용되는 경우, 현재 블록의 픽셀, 행, 열 또는 서브 블록 등과 같은 소정의 단위로 각각 다른 가중치 파라미터가 적용될 수 있다. 가중치 파라미터는 주변 블록들의 가중치 파라미터들 중 적어도 하나의 가중치 파라미터(들)로부터 유도될 수 있다.One or more weight parameters cw of the prediction mode in the curved screen may be applied to the current block. When a plurality of weighting parameters are applied, different weighting parameters may be applied in predetermined units such as pixels, rows, columns, or sub-blocks of the current block. The weight parameter may be derived from at least one weight parameter (s) of the weight parameters of the neighboring blocks.
곡률 파라미터 및/또는 가중치 파라미터를 유도하기 위한 주변 블록은 현재 블록의 상단, 좌측 및/또는 우측에 인접한 이미 부호화/복호화된 블록들일 수 있다.The neighboring block for deriving the curvature parameter and / or the weight parameter may be already encoded / decoded blocks adjacent to the top, left and / or right side of the current block.
cuv와 cw 중 적어도 하나 이상을 이용하여 다양한 형태의 곡선형 화면 내 예측을 수행할 수 있다. Various forms of curved intra prediction may be performed using at least one of cuv and cw.
N개의 cuv 와 M개의 cw를 이용하는 경우, 적어도 NxMx4개 이상의 예측 블록을 생성하여 현재 블록의 화면 내 예측을 수행할 수 있다.In case of using N cuv and M cw, at least NxMx4 or more prediction blocks may be generated to perform intra prediction of the current block.
예를 들어, 1개의 cuv 와 1개의 cw를 이용하면, 적어도 4개 이상의 예측 블록을 생성하여 현재 블록의 화면 내 예측을 수행할 수 있다. For example, when one cuv and one cw are used, at least four prediction blocks may be generated to perform intra prediction of the current block.
예를 들어, 2개의 cuv 와 1개의 cw를 이용하면, 적어도 8개 이상의 예측 블록을 생성하여 현재 블록의 화면 내 예측을 수행할 수 있다. For example, by using two cuv and one cw, at least eight prediction blocks may be generated to perform intra prediction of the current block.
예를 들어, 1개의 cuv 와 2개의 cw를 이용하면, 적어도 8개 이상의 예측 블록을 생성하여 현재 블록의 화면 내 예측을 수행할 수 있다. For example, when one cuv and two cws are used, at least eight prediction blocks may be generated to perform intra prediction of the current block.
예를 들어, 2개의 cuv 와 2개의 cw를 이용하면, 적어도 16개 이상의 예측 블록을 생성하여 현재 블록의 화면 내 예측을 수행할 수 있다. For example, by using two cuv and two cw, at least 16 prediction blocks may be generated to perform intra prediction of the current block.
2개 이상의 cuv 및/또는 cw 정보는, default 값과 delta 값을 이용하여 부호화/복호화될 수 있다. 이때, Default는 하나의 cuv값 및/또는 하나의 cw값을 의미할 수 있으며, delta는 상수 값일 수 있다.Two or more cuv and / or cw information may be encoded / decoded using a default value and a delta value. In this case, Default may mean one cuv value and / or one cw value, and delta may be a constant value.
예를 들어, 현재 블록에서 2개의 cuv를 이용할 경우, 2개의 곡률 파라미터는 default_cuv, default_cuv + delta_cuv가 될 수 있다.For example, when using two cuv in the current block, two curvature parameters may be default_cuv, default_cuv + delta_cuv.
예를 들어, 현재 블록에서 N개의 cuv를 이용할 경우, N개의 곡률 파라미터는 default_cuv, default_cuv + delta_cuv, default_cuv + 2*delta_cuv, … , default_cuv + (N-1)*delta_cuv가 될 수 있다. (단, N은 2 이상의 양의 정수)For example, when using N cuv in the current block, the N curvature parameters are default_cuv, default_cuv + delta_cuv, default_cuv + 2 * delta_cuv,... , default_cuv + (N-1) * delta_cuv. (Where N is a positive integer of 2 or greater)
예를 들어, 현재 블록에서 2N+1개의 cuv를 이용할 경우, 2N+1개의 곡률 파라미터는 default_cuv, default_cuv+delta_cuv, default_cuv-delta_cuv, default_cuv+2*delta_cuv, default_cuv-2*delta_cuv, … , default_cuv+N*delta_cuv, default_cuv-N*delta_cuv가 될 수 있다. (단, N은 1 이상의 양의 정수)For example, when using 2N + 1 cuv in the current block, the 2N + 1 curvature parameters are default_cuv, default_cuv + delta_cuv, default_cuv-delta_cuv, default_cuv + 2 * delta_cuv, default_cuv-2 * delta_cuv,... , default_cuv + N * delta_cuv and default_cuv-N * delta_cuv. (Where N is a positive integer of 1 or more)
예를 들어, 현재 블록에서 2개의 cw를 이용할 경우, 2개의 가중치 파라미터는 default_cw, default_cw + delta_cw가 될 수 있다. (단, default_cw + delta_cw는 벡터의 원소 단위의 덧셈)For example, when using two cws in the current block, the two weighting parameters may be default_cw, default_cw + delta_cw. (Default_cw + delta_cw is the addition of element units of the vector)
예를 들어, 현재 블록에서 M개의 cw를 이용할 경우, M개의 가중치 파라미터는 default_cw, default_cw + delta_cw, default_cw + 2*delta_cw, … , default_cw + (M-1)*delta_cw가 될 수 있다. (단, default_cw+ delta_cw는 벡터의 원소 단위의 덧셈, M은 2 이상의 양의 정수)For example, when using M cw in the current block, the M weight parameters are default_cw, default_cw + delta_cw, default_cw + 2 * delta_cw,... , default_cw + (M-1) * delta_cw. (Where default_cw + delta_cw is the addition of the unit of elements of the vector, and M is a positive integer of 2 or more)
예를 들어, 현재 블록에서 2M+1개의 cw를 이용할 경우, 2M+1개의 곡률 파라미터는 default_cw, default_cw + delta_cw, default_cw - delta_cw, default_cw + 2*delta_cw, default_cw - 2*delta_cw, … , default_cw + M*delta_cw, default_cw - M*delta_cw가 될 수 있다. (단, M은 1 이상의 양의 정수)For example, if 2M + 1 cw is used in the current block, the 2M + 1 curvature parameters are default_cw, default_cw + delta_cw, default_cw-delta_cw, default_cw + 2 * delta_cw, default_cw-2 * delta_cw,... , default_cw + M * delta_cw, default_cw-M * delta_cw. (Where M is a positive integer of 1 or greater)
전술한 cuv 및/또는 cw 정보는 비트스트림으로 부호화 또는 비트스트림으로부터 복호화될 수 있다. 또는 인코더와 디코더는 cuv 및/또는 cw 의 개수 및/또는 값에 관한 정보를 예컨대, 룩업 테이블의 형태로 공유하여 저장할 수 있다. The above-described cuv and / or cw information may be encoded or decoded into a bitstream. Alternatively, the encoder and the decoder may share and store information about the number and / or value of cuv and / or cw in the form of a lookup table, for example.
상기 SRP_flag가 1인 경우, 현재 블록 또는 서브 블록에 대해 결정된 화면 내 모드를 이용하여 잔차 신호의 예측을 수행할 수 있다.When the SRP_flag is 1, prediction of the residual signal may be performed using an intra picture mode determined for the current block or sub block.
상기 화면 내 예측에 관한 정보는 부호화 파라미터 중 적어도 하나 이상에 기반하여 비트스트림으로부터 엔트로피 부호화/복호화될 수 있다. 예를 들어, NDIP_flag는 블록의 분할 정보와 관련된 정보에 기반하여 부호화/복호화될 수 있다. The information about the intra prediction may be entropy encoded / decoded from the bitstream based on at least one or more of coding parameters. For example, NDIP_flag may be encoded / decoded based on information related to partition information of a block.
일 예로, split_flag, quadtree_flag, binarytree_flag 중 적어도 하나 이상이 '0' 이어서 더 이상 분할되지 않는 경우, 상기 NDIP_flag는 부호화/복호화될 수 있다.For example, when at least one of split_flag, quadtree_flag, and binarytree_flag is '0' and no longer split, the NDIP_flag may be encoded / decoded.
일 예로, binarytree_flag가 1인 경우, NDIP_flag는 부호화/복호화되지 않을 수 있다.For example, when binarytree_flag is 1, NDIP_flag may not be encoded / decoded.
상기 화면 내 예측에 관한 정보 중 적어도 하나 이상은 블록의 크기, 형태 중 적어도 하나 이상에 기반하여 시그널링되지 않을 수 있다. At least one or more of the information about the intra prediction may not be signaled based on at least one or more of the size and shape of the block.
예를 들어, 현재 블록의 크기가 소정의 크기에 해당하는 경우, 현재 블록에 대한 화면 내 예측에 관한 정보 중 하나 이상이 시그널링되지 않고, 이전에 부호화/복호화된 상위 블록 크기에 해당하는 화면 내 예측에 관한 하나 이상의 정보가 이용될 수 있다. For example, when the size of the current block corresponds to a predetermined size, at least one of the information about the intra prediction for the current block is not signaled, and the intra prediction corresponding to the higher block size previously encoded / decoded is not signaled. One or more information regarding may be used.
예를 들어, 현재 블록의 형태가 직사각형인 경우, 현재 블록에 대한 화면 내 예측에 관한 정보 중 하나 이상이 시그널링되지 않고 이전에 부호화/복호화된 상위 블록 크기에 해당하는 화면 내 예측에 관한 하나 이상의 정보가 이용될 수 있다. For example, when the shape of the current block is rectangular, one or more pieces of information about the intra prediction corresponding to the higher block size previously encoded / decoded without at least one of the information about the intra prediction for the current block is not signaled. Can be used.
상기 SRP_flag가 1인 경우, 현재 블록 또는 서브 블록에 대해 결정된 화면 내 모드를 이용하여 잔차 신호의 예측이 수행될 수 있다.When the SRP_flag is 1, prediction of the residual signal may be performed using an intra picture mode determined for the current block or sub block.
상기 화면 내 예측에 관한 정보 중 적어도 하나 이상을 엔트로피 부호화/복호화할 때, 아래의 이진화(binarization) 방법 중 적어도 하나 이상이 이용될 수 있다.When entropy encoding / decoding at least one or more pieces of information on the intra prediction, at least one or more of the following binarization methods may be used.
- 절삭된 라이스(Truncated Rice) 이진화 방법Truncated Rice Binarization Method
- K차수 지수-골롬(K-th order Exp_Golomb) 이진화 방법K-th order Exp_Golomb binarization
- 제한된 K차수 지수-골롬(K-th order Exp_Golomb) 이진화 방법Limited K-th order Exp_Golomb binarization
- 고정 길이(Fixed-length) 이진화 방법Fixed-length binarization
- 단항(Unary) 이진화 방법Unary Binarization Method
- 절삭된 단항(Truncated Unary) 이진화 방법Truncated Unary Binarization Method
이하에서, 참조 샘플 구성 단계(S1220)에 대해 보다 상세히 설명한다.Hereinafter, the reference sample construction step S1220 will be described in more detail.
상기 유도된 화면 내 예측 모드를 기반으로 상기 현재 블록 또는 현재 블록보다 작은 크기 및/또는 형태를 가지는 서브 블록에 대한 화면 내 예측을 수행함에 있어, 예측을 위해 사용되는 참조 샘플을 구성할 수 있다. 이하에서는 현재 블록을 기준으로 설명하며 상기 현재 블록은 서브 블록을 의미할 수 있다. 상기 참조 샘플은 현재 블록 주변의 복원된 하나 이상의 샘플 또는 샘플 조합을 이용하여 구성할 수 있다. 추가적으로 상기 참조 샘플을 구성함에 있어 필터링이 적용될 수 있다. 이때 복수의 복원 샘플 라인 상의 각 복원 샘플들을 그대로 사용하여 참조 샘플을 구성할 수 있다. 또는, 동일 복원 샘플 라인 상의 샘플 간 필터링 후 참조 샘플을 구성할 수 있다. 또는, 서로 다른 복원 샘플 라인 상의 샘플 간 필터링 후 참조 샘플을 구성할 수 있다. 상기 구성된 참조 샘플은 ref[m, n], 주변의 복원된 샘플 또는 이를 필터링한 샘플은 rec[m, n]으로 나타낼 수 있다. 이때, 상기 m 또는 n은 소정의 정수 값일 수 있다. 현재 블록의 크기가 W(가로) x H(세로)인 경우, 현재 블록 내의 왼쪽 상단 샘플 위치는 (0, 0)일 때, 해당 샘플 위치를 기준으로 가장 근접한 왼쪽 상단의 참조 샘플의 상대적인 위치를 (-1, -1)로 설정할 수 있다. In performing intra prediction on the current block or a sub block having a size and / or shape smaller than the current block based on the derived intra prediction mode, a reference sample used for prediction may be configured. Hereinafter, a description will be given based on the current block, and the current block may mean a sub block. The reference sample may be constructed using one or more reconstructed samples or sample combinations around the current block. In addition, filtering may be applied to construct the reference sample. In this case, each of the reconstructed samples on the plurality of reconstructed sample lines may be used as a reference sample. Alternatively, the reference sample may be configured after inter-sample filtering on the same reconstructed sample line. Alternatively, a reference sample may be configured after filtering between samples on different reconstructed sample lines. The configured reference sample may be represented by ref [m, n], a reconstructed sample around the sample, or a filtered sample thereof as rec [m, n]. In this case, m or n may be a predetermined integer value. If the size of the current block is W (horizontal) x H (vertical), when the top left sample position within the current block is (0, 0), the relative position of the closest top left reference sample relative to that sample position is determined. Can be set to (-1, -1).
도 32는 현재 블록의 화면 내 예측에 이용될 수 있는 주변의 복원 샘플 라인들을 예시적으로 도시한 도면이다.32 is a diagram illustrating surrounding reconstructed sample lines that may be used for in-picture prediction of a current block.
도 32에 도시된 바와 같이, 현재 블록에 인접한 하나 이상의 복원 샘플 라인을 이용하여, 참조 샘플이 구성될 수 있다. As shown in FIG. 32, a reference sample may be constructed using one or more reconstructed sample lines adjacent to the current block.
예를 들어, 도 32에 도시된 복수의 복원 샘플 라인 중 하나의 라인을 선택하고, 선택된 복원 샘플 라인을 이용하여 참조 샘플을 구성할 수 있다. 상기 선택된 복원 샘플 라인은 복수의 복원 샘플 라인들 중 특정 라인으로 고정적으로 선택될 수 있다. 또는, 상기 선택된 복원 샘플 라인은 복수의 복원 샘플 라인 중 특정 라인으로 적응적으로 선택될 수 있다. 이때 선택되는 복원 샘플 라인에 대한 지시자가 시그널링될 수 있다.For example, one line of the plurality of reconstructed sample lines illustrated in FIG. 32 may be selected, and a reference sample may be configured using the selected reconstructed sample line. The selected reconstructed sample line may be fixedly selected as a specific line among a plurality of reconstructed sample lines. Alternatively, the selected reconstructed sample line may be adaptively selected as a specific line among a plurality of reconstructed sample lines. In this case, an indicator for the selected reconstructed sample line may be signaled.
예를 들어, 도 32에 도시된 복수의 복원 샘플 라인 중 하나 이상의 복원 샘플 라인의 조합을 이용하여 참조 샘플을 구성할 수 있다. 일 예로, 참조 샘플은 하나 이상의 복원 샘플들의 가중합(또는 가중 평균)으로 구성될 수 있다. 상기 가중합에 이용되는 가중치는 현재 블록으로부터의 거리에 기초하여 부여될 수 있다. 이때, 현재 블록에 가까울수록 더 큰 가중치가 부여될 수 있으며, 예컨대, 아래의 수학식 15가 이용될 수 있다.For example, a reference sample may be constructed using a combination of one or more reconstructed sample lines of the plurality of reconstructed sample lines shown in FIG. 32. As an example, the reference sample may consist of a weighted sum (or weighted average) of one or more reconstructed samples. The weight used for the weighted sum may be given based on the distance from the current block. In this case, the closer to the current block, the greater the weight may be given. For example, Equation 15 below may be used.

또는, 현재 블록으로부터의 거리 또는 화면 내 예측 모드 중 적어도 하나에 기반하여 복수의 복원 샘플들의 평균값, 최대값, 최소값, 중간값, 최빈값 중 적어도 하나 이상의 값을 이용하여 참조 샘플을 구성할 수 있다. Alternatively, the reference sample may be configured using at least one of an average value, a maximum value, a minimum value, a median value, and a mode value of the plurality of reconstructed samples based on at least one of a distance from the current block or an intra prediction mode.
또는, 연속하는 복수의 복원 샘플들의 값의 변화(변화량)에 기초하여 참조 샘플을 구성할 수 있다. 예컨대, 연속하는 두 개의 복원 샘플들의 값이 임계치 이상 차이나는지 여부, 연속하는 복수의 복원 샘플들의 값이 연속적으로 또는 불연속적으로 변하는지 여부 등 적어도 하나 이상에 기초하여 참조 샘플을 구성할 수 있다. 예컨대, rec[-1, -1]과 rec[-2, -1]이 임계치 이상 차이나는 경우, ref[-1, -1]은 rec[-1, -1]로 결정되거나, rec[-1, -1]에 소정의 가중치를 부여한 가중 평균을 적용한 값으로 결정될 수 있다. 예컨대, 연속하는 복수의 복원 샘플들의 값이 현재 블록에 가까워질수록 n씩 변하는 경우, 참조 샘플 ref[-1, -1] = rec[-1, -1]-n으로 결정될 수 있다. Alternatively, the reference sample may be configured based on a change (change amount) of values of a plurality of consecutive reconstructed samples. For example, the reference sample may be configured based on at least one or more of whether a value of two consecutive reconstructed samples differs by a threshold or more, and whether a value of a plurality of consecutive reconstructed samples changes continuously or discontinuously. For example, if rec [-1, -1] and rec [-2, -1] differ by more than a threshold value, ref [-1, -1] is determined as rec [-1, -1] or rec [- 1, -1] may be determined by applying a weighted average to which a predetermined weight is applied. For example, when a value of a plurality of consecutive reconstructed samples changes by n as the current block approaches, it may be determined that reference samples ref [-1, -1] = rec [-1, -1] -n.
상기 참조 샘플 구성에 사용되는 복원 샘플 라인의 개수, 위치, 구성 방법 중 적어도 하나는 현재 블록의 상단 또는 좌측의 경계가 픽처, 슬라이스, 타일, 부호화 트리 블록(CTB) 중 적어도 하나의 경계에 해당하는 경우에 따라 다르게 결정될 수 있다.At least one of the number, location, and configuration method of the reconstructed sample lines used in the reference sample configuration may include a boundary at the top or the left of the current block corresponding to at least one of a picture, slice, tile, and coded tree block (CTB). It may be determined differently in some cases.
예를 들어, 복원 샘플 라인 1과 2를 이용하여 참조 샘플을 구성함에 있어, 현재 블록의 상단 경계가 CTB 경계에 해당하는 경우, 상단에 대해서는 복원 샘플 라인 1을 이용하고, 좌측에 대해서는 복원 샘플 라인 1 및 2를 이용할 수 있다.For example, in constructing a reference sample using reconstructed sample lines 1 and 2, when the upper boundary of the current block corresponds to the CTB boundary, the reconstructed sample line 1 is used for the upper side and the reconstructed sample line for the left side. 1 and 2 can be used.
예를 들어, 복원 샘플 라인 1 내지 4를 이용하여 참조 샘플을 구성함에 있어, 현재 블록의 상단 경계가 CTB 경계에 해당하는 경우, 상단에 대해서는 복원 샘플 라인 1 내지 2를 이용하고 좌측에 대해서는 복원 샘플 라인 1 내지 4를 이용할 수 있다.For example, in constructing a reference sample using reconstructed sample lines 1 to 4, if the upper boundary of the current block corresponds to the CTB boundary, the reconstructed sample lines 1 to 2 are used for the upper side and the reconstructed sample for the left side. Lines 1 to 4 can be used.
예를 들어, 복원 샘플 라인 2를 이용하여 참조 샘플을 구성함에 있어, 현재 블록의 상단 경계가 CTB 경계에 해당하는 경우, 상단에 대해서는 복원 샘플 라인 1을 이용하고, 좌측에 대해서는 복원 샘플 라인 2를 이용할 수 있다.For example, in constructing a reference sample using reconstructed sample line 2, when the upper boundary of the current block corresponds to the CTB boundary, the reconstructed sample line 1 is used for the upper side and the reconstructed sample line 2 for the left side. It is available.
상기 과정을 통하여 구성되는 참조 샘플의 라인은 1개 이상의 복수일 수 있다.The line of the reference sample configured through the above process may be one or more.
상기 현재 블록의 상단의 참조 샘플 구성 방법과 좌측의 참조 샘플 구성 방법이 상이할 수 있다.The method of configuring a reference sample on the upper side of the current block may be different from the method of configuring the reference sample on the left side.
상기의 방법 중 적어도 하나 이상의 방법으로 참조 샘플을 구성했음을 나타내는 정보를 부호화/복호화할 수 있다. 예를 들어, 복수 개의 복원 샘플 라인을 사용했는지 여부를 나타내는 정보를 부호화/복호화할 수 있다.Information indicating that a reference sample is configured by at least one or more of the above methods may be encoded / decoded. For example, information indicating whether a plurality of reconstructed sample lines are used may be encoded / decoded.
현재 블록이 복수 개의 서브 블록들로 분할되고 각 서브 블록이 독립적인 화면 내 예측 모드를 가질 때, 각 서브 블록에 대해 참조 샘플을 구성할 수 있다. When the current block is divided into a plurality of sub blocks and each sub block has an independent intra prediction mode, a reference sample may be configured for each sub block.
도 33은 현재 블록에 포함된 서브 블록에 대해 참조 샘플을 구성하는 실시예를 설명하기 위한 도면이다.33 is a diagram for describing an embodiment of configuring a reference sample for a subblock included in a current block.
도 33에 도시된 바와 같이, 현재 블록이 16x16이고 16개의 4x4 서브 블록들이 독립된 화면 내 예측 모드를 가질 때, 각 서브 블록의 참조 샘플은 서브 블록의 예측을 수행하는 스캐닝 방식에 따라, 적어도 다음 한가지 방식으로 구성될 수 있다. As shown in FIG. 33, when the current block is 16x16 and 16 4x4 subblocks have independent intra prediction modes, the reference sample of each subblock is at least one of the following according to a scanning scheme for performing the prediction of the subblock. Can be configured in a manner.
예를 들어, 현재 블록에 인접한 N개의 복원 샘플 라인을 이용하여 각 서브 블록의 참조샘플을 구성할 수 있다. 도 33에 도시된 예는 상기 N이 1인 경우이다.For example, a reference sample of each subblock may be configured using N reconstructed sample lines adjacent to the current block. An example shown in FIG. 33 is the case where N is 1.
예를 들어, 래스터 스캔 순서(raster scan order)(1->2->3->….15->16)에 따라 복수 개의 서브 블록을 예측할 때, K번째 서브 블록의 참조 샘플을 구성함에 있어 기 부호화/복호화된 좌측, 상단, 우상단 및 좌하단 중 적어도 하나 이상의 서브 블록의 샘플을 이용하여 참조 샘플을 구성할 수 있다. For example, when predicting a plurality of subblocks according to a raster scan order (1-> 2-> 3->… .15-> 16), in constructing a reference sample of the Kth subblock, A reference sample may be configured by using samples of at least one subblock among pre-encoded / decoded left, top, right top and bottom left ends.
예를 들어, Z-스캔 순서(1->2->5->6->3->4->7->… 12->15->16)에 따라 복수 개의 서브 블록을 예측할 때, K번째 서브 블록의 참조 샘플을 구성함에 있어 기 부호화/복호화된 좌측, 상단, 우상단 및 좌하단 중 적어도 하나 이상의 서브 블록의 샘플을 이용하여 참조 샘플을 구성할 수 있다. For example, when predicting a plurality of subblocks according to the Z-scan order (1-> 2-> 5-> 6-> 3-> 4-> 7->… 12-> 15-> 16), K In configuring the reference sample of the first sub-block, a reference sample may be configured by using at least one sample of at least one sub-block among pre-encoded / decoded left, upper, upper right and lower left ends.
예를 들어, 지그재그 스캔(zigzag-scan) 순서(1->2->5->9->6->3->4->… 12->15->16)으로 복수 개의 서브 블록을 예측할 때, K번째 서브 블록의 참조 샘플을 구성함에 있어 기 부호화/복호화된 좌측, 상단, 우상단 및 좌하단 중 적어도 하나 이상의 서브 블록 샘플을 이용하여 참조 샘플을 구성할 수 있다. For example, a plurality of subblocks may be predicted in a zigzag-scan order (1-> 2-> 5-> 9-> 6-> 3-> 4->… 12-> 15-> 16). In the case of configuring the reference sample of the K-th subblock, the reference sample may be configured by using at least one subblock sample among the left, upper, upper right and lower left that are previously encoded / decoded.
예를 들어, 수직 스캔 순서(vertical scan order)(1->5->9->13->2->6->… 8->12->16)에 따라 복수 개의 서브 블록을 예측할 때, K번째 서브 블록의 참조 샘플을 구성함에 있어 기 부호화/복호화된 좌측, 상단, 우상단 및 좌하단 중 적어도 하나 이상의 서브 블록의 샘플을 이용하여 참조 샘플을 구성할 수 있다. For example, when predicting a plurality of subblocks according to a vertical scan order (1-> 5-> 9-> 13-> 2-> 6->… 8-> 12-> 16), In configuring a reference sample of the K-th subblock, a reference sample may be configured by using samples of at least one or more subblocks among the left, upper, upper right, and lower left that are previously encoded / decoded.
상기 스캔 순서 이 외의 스캔 순서에 따라 복수 개의 서브 블록을 예측할 때, K번째 서브 블록의 참조 샘플을 구성함에 있어 기 부호화/복호화된 좌측, 상단, 우상단 및 좌하단의 서브 블록의 샘플을 이용하여 참조 샘플을 구성할 수 있다.When predicting a plurality of subblocks according to a scan order other than the above scan order, reference is made by using samples of subblocks of the left, upper, upper right and lower left that are previously encoded / decoded in constructing a reference sample of the Kth subblock. Samples can be constructed.
상기 참조 샘플을 선택함에 있어, 참조 샘플을 포함하고 있는 블록의 가용성(availability) 판단 및/또는 패딩(padding)이 수행될 수 있다. 예를 들어, 참조 샘플을 포함하고 있는 블록이 가용한 경우에는 해당하는 상기 참조 샘플을 이용할 수 있다. 한편, 상기 참조 샘플을 포함하고 있는 블록이 가용하지 않은 경우에는 주변의 가능한 하나 이상의 참조 샘플을 이용하여 상기 가용하지 않은 참조 샘플을 패딩하여 대체할 수 있다.In selecting the reference sample, an availability determination and / or padding of a block including the reference sample may be performed. For example, when a block including a reference sample is available, the corresponding reference sample may be used. On the other hand, if the block containing the reference sample is not available, one or more surrounding reference samples may be used to pad and replace the unused reference samples.
상기 참조 샘플이 픽처, 타일, 슬라이스, 부호화 트리 블록(CTB), 소정의 경계 중 적어도 하나의 경계 밖에 존재하는 경우, 상기 참조 샘플은 가용하지 않다고 판단될 수 있다.When the reference sample exists outside at least one of a picture, a tile, a slice, a coding tree block (CTB), and a predetermined boundary, it may be determined that the reference sample is not available.
현재 블록을 제한된 화면 내 예측(CIP: constrained intra prediction)으로 부호화하는 경우에, 상기 참조 샘플을 포함한 블록이 화면 간 모드로 부/복호화되어 있으면 상기 참조 샘플은 가용하지 않다고 판단된 수 있다.When the current block is encoded by constrained intra prediction (CIP), if the block including the reference sample is encoded / decoded in the inter picture mode, it may be determined that the reference sample is not available.
도 34는 가용한 복원 샘플을 이용하여 가용하지 않은 복원 샘플을 대체하는 방법을 설명하기 위한 도면이다.FIG. 34 is a diagram for describing a method of replacing an unavailable restoration sample by using an available restoration sample.
상기 주변의 복원 샘플이 가용하지 않다고 판단되는 경우, 주변의 가용한 복원 샘플을 이용하여 상기 가용하지 않은 샘플을 대체할 수 있다. 예를 들어, 도 34에 도시된 바와 같이, 가용한 샘플과 가용하지 않은 샘플이 존재하는 경우, 하나 이상의 가용한 샘플을 이용하여 상기 가용하지 않은 샘플을 대체할 수 있다.If it is determined that the surrounding reconstructed samples are not available, the surrounding available reconstructed samples may be used to replace the unavailable samples. For example, as shown in FIG. 34, when there are available and unavailable samples, one or more available samples may be used to replace the unavailable samples.
비가용 샘플의 샘플값은 소정의 순서에 따라, 가용 샘플의 샘플값으로 대체될 수 있다. 비가용 샘플의 대체에 이용되는 가용 샘플은 비가용 샘플에 인접한 가용 샘플일 수 있다. 인접한 가용 샘플이 없는 경우, 가장 먼저 출현하는 또는 가장 가까운 가용 샘플이 이용될 수 있다. 비가용 샘플의 대체 순서는 예컨대, 좌하단에서 우상단의 순서일 수 있다. 또는 우상단에서 좌하단의 순서일 수 있다. 또는 좌상단 코너에서 우상단 및/또는 좌하단의 순서일 수 있다. 또는 우상단 및/또는 좌하단에서 좌상단 코너의 순서일 수 있다. The sample value of the insoluble sample may be replaced with the sample value of the available sample in a predetermined order. The soluble sample used to replace the insoluble sample may be a soluble sample adjacent to the insoluble sample. If there are no adjacent available samples, the first appearing or closest available sample may be used. The replacement order of the unavailable sample may be, for example, the order from the bottom left to the top right. Alternatively, the order may be from the upper right to the lower left. Or in the order of the upper left and / or lower left at the upper left corner. Or from the upper right corner and / or the lower left corner to the upper left corner.
도 34에 도시된 바와 같이, 좌하단 샘플 위치인 0부터 시작하여 우상단 샘플의 순서로 비가용 샘플의 대체가 수행될 수 있다. 이 경우, 처음의 가용하지 않은 샘플 4개는 가장 먼저 출현하는 또는 가장 가까운 가용 샘플 a의 값으로 대체될 수 있다. 다음의 가용하지 않은 샘플 13개는 마지막 가용 샘플 b의 값으로 대체될 수 있다. As shown in FIG. 34, replacement of the unavailable sample may be performed in the order of the upper right sample starting from 0, which is the lower left sample position. In this case, the first four unavailable samples may be replaced with the value of the first appearing or nearest available sample a. The next thirteen unavailable samples can be replaced with the value of the last available sample b.
또는, 비가용 샘플은 가용한 샘플들의 조합을 이용하여 대체될 수 있다. 예를 들어, 비가용 샘플의 양쪽 끝에 인접한 가용 샘플의 평균값을 이용하여 상기 비가용 샘플을 대체할 수 있다. 예컨대, 도 34에 있어서, 처음의 가용하지 않은 샘플 4개는 가용 샘플 a의 값으로 채우고, 다음의 가용하지 않은 샘플 13개는 가용 샘플 b와 c의 평균값으로 채울 수 있다. 또는, 13개의 비가용 샘플은 가용 샘플 b와 c의 샘플값 사이의 임의의 값으로 대체될 수 있다. 이 경우, 비가용 샘플들은 서로 다른 값으로 대체될 수 있다. 예컨대, 비가용 샘플은 가용 샘플 a에 근접할수록 a의 값에 근접한 값으로 대체될 수 있다. 마찬가지로 비가용 샘플은 가용 샘플 b에 근접할수록 b의 값에 근접한 값으로 대체될 수 있다. 즉, 비가용 샘플로부터 가용 샘플 a 및/또는 b까지의 거리에 기초하여, 비가용 샘플의 값이 결정될 수 있다.Alternatively, the insoluble sample can be replaced using a combination of available samples. For example, the average value of the available samples adjacent to both ends of the insoluble sample can be used to replace the insoluble sample. For example, in FIG. 34, the first four unavailable samples can be filled with the value of the available sample a, and the next thirteen unavailable samples can be filled with the average value of the available samples b and c. Alternatively, thirteen unavailable samples can be replaced with any value between the sample values of available samples b and c. In this case, the unavailable samples can be replaced with different values. For example, an insoluble sample may be replaced with a value closer to the value of a as it becomes closer to available sample a. Likewise, an unavailable sample can be replaced with a value closer to the value of b as it approaches the available sample b. That is, based on the distance from the insoluble sample to the available samples a and / or b, the value of the insoluble sample can be determined.
비가용 샘플의 대체를 위해 상기 방법들을 포함하는 복수의 방법 중 하나 이상이 선택적으로 적용될 수 있다. 비가용 샘플의 대체 방법은 비트스트림에 포함된 정보에 의해 시그널링 되거나, 부호화기와 복호화기가 미리 정한 방법이 이용될 수 있다. 또는 비가용 샘플의 대체 방법은 미리 정한 방식에 의해 유도될 수 있다. 예컨대, 가용 샘플 a와 b의 값의 차이 및/또는 비가용 샘플의 개수에 기초하여 비가용 샘플의 대체 방법을 선택할 수 있다. 예컨대, 두 개의 가용 샘플의 값의 차이와 임계값의 비교 및/또는 비가용 샘플의 개수와 임계값의 비교에 기초하여 비가용 샘플의 대체 방법이 선택될 수 있다. 예컨대, 두 개의 가용 샘플의 값의 차이가 임계값보다 크거나, 및/또는 비가용 샘플의 개수가 임계값보다 큰 경우, 비가용 샘플들은 서로 다른 값을 갖도록 대체될 수 있다.One or more of a plurality of methods including the above methods may optionally be applied for the replacement of an insoluble sample. The alternative method of the unavailable sample may be signaled by information included in the bitstream, or a method predetermined by the encoder and the decoder may be used. Alternatively, an alternative method of insoluble sample can be derived by a predetermined method. For example, an alternative method of insoluble samples can be selected based on the difference between the values of available samples a and b and / or the number of insoluble samples. For example, an alternative method may be selected based on the difference between the values of the two available samples and the threshold and / or the comparison of the number and threshold of the unavailable samples. For example, if the difference between the values of the two available samples is greater than the threshold and / or the number of unavailable samples is greater than the threshold, the unavailable samples may be replaced to have different values.
상기 구성된 하나 이상의 참조 샘플에 대해서 현재 블록의 화면 내 예측 모드, 블록의 크기 및 형태 중 적어도 하나 이상에 따라 필터링 적용 여부를 결정할 수 있다. 상기 필터링을 적용하는 경우에는 상기 현재 블록의 화면 내 예측 모드, 크기 및 형태 중 적어도 하나에 따라 필터 유형이 달라질 수 있다. The filtering may be determined with respect to the configured one or more reference samples according to at least one of an intra prediction mode, a size and a shape of the block of the current block. When the filtering is applied, the filter type may vary according to at least one of an intra prediction mode, a size, and a shape of the current block.
예를 들어, 상기 복수 개의 참조 샘플 라인의 각각에 대한 필터링 적용 여부 및/또는 유형을 다르게 결정할 수 있다. 예를 들어, 인접한 첫 번째 라인에 대해서는 필터링을 적용하고 두 번째 라인에 대해서는 필터링을 적용하지 않을 수 있다.For example, whether to apply filtering and / or type for each of the plurality of reference sample lines may be determined differently. For example, filtering may be applied to the first adjacent line and no filtering may be applied to the second line.
예를 들어, 상기 참조 샘플에 대해 필터링을 적용한 값과 적용하지 않은 값을 같이 사용할 수 있다.For example, the value to which the filtering is applied and the value to which the filtering is not applied may be used together for the reference sample.
예를 들어, 복호화된 대상 블록의 화면 내 예측 모드(intraPredMode)가 방향성 예측 모드인 경우, 수직 방향성 모드(방향성 모드가 33개인 경우, 인덱스=26에 해당하는 모드)와의 차이 값과 수평 방향성 모드(방향성 모드가 33개인 경우, 인덱스=10에 해당하는 모드)와의 차이값 중 더 작은 값 [minDistVerHor = Min(Abs(intraPredMode-26), abs(intraPredMode-10))]을 구할 수 있다. For example, when the intra prediction mode (intraPredMode) of the decoded target block is the directional prediction mode, the difference value between the vertical directional mode (the mode corresponding to index = 26 when the directional mode is 33) and the horizontal directional mode ( In the case of 33 directional modes, a smaller value [minDistVerHor = Min (Abs (intraPredMode-26), abs (intraPredMode-10))] from the difference between the index and the mode corresponding to 10 may be obtained.
도 35는 필터링 여부를 결정하기 위한 블록 사이즈 별 임계값을 예시적으로 나타낸 도면이다.35 is a diagram illustrating a threshold for each block size for determining whether to filter.
예를 들어, 4x4 블록에 대한 임계값은 10, 8x8 블록에 대한 임계값은 7, 16x16 블록에 대한 임계값은 1, 32x32 블록에 대한 임계값은 0, 64x64 블록에 대한 임계값은 10일 수 있다.For example, the threshold for a 4x4 block is 10, the threshold for an 8x8 block is 7, the threshold for a 16x16 block is 1, the threshold for a 32x32 block is 0, and the threshold for a 64x64 block is 10. have.
상기 minDistVerHor 값이 해당 블록 사이즈에 할당된 임계값보다 큰 경우(minDistVerHor>intraHorVerDistThresh)에는 필터링을 수행하고, 작거나 같은 경우에는 필터링을 수행하지 않을 수 있다.If the minDistVerHor value is larger than the threshold value allocated to the corresponding block size (minDistVerHor> intraHorVerDistThresh), filtering may be performed. If the minDistVerHor value is smaller than or equal to, the filtering may not be performed.
도 36은 블록 사이즈 및/또는 화면 내 예측 모드에 따른 필터링 수행 여부를 예시적으로 도시한 도면이다. 도 36에 있어서, X는 필터링이 수행되지 않음을, O는 필터링이 수행됨을 나타낼 수 있다.36 is a diagram exemplarily illustrating whether filtering is performed according to a block size and / or an intra prediction mode. In FIG. 36, X may indicate that filtering is not performed and O may indicate that filtering is performed.
예를 들어, 도 36에 도시된 바와 같이, 8<=NS<=32인 부호화/복호화 대상 블록에 대하여, 블록 사이즈 및/또는 방향성 예측 모드에 따라 필터링 수행 여부를 결정할 수 있다. For example, as illustrated in FIG. 36, it may be determined whether filtering is performed on an encoding / decoding target block having 8 <= N S <= 32 according to a block size and / or a directional prediction mode.
필터링을 적용하는 또 다른 실시예로서, 큰 블록 사이즈를 갖는 부호화/복호화 대상 블록에 대해 양선형 보간 필터링(bi-linear interpolation filtering)을 수행할 수 있다. 예를 들어, NS의 블록 크기를 갖는 부호화/복호화 대상 블록에 대하여 수직 방향과 수평 방향의 2차 미분 값을 구할 수 있다. 상기 2차 미분 값이 특정 임계값보다 작은 경우 (예컨대, |pref(-1, -1) - 2 x pref(NS/2, -1) + pref(NS, -1)| <2Bd
-C 및/또는 |pref(-1, -1) - 2 x pref(-1, NS/2) + pref(-1, NS)| < 2Bd
-C (Bd는 bit-depth, 1<=C<= Bd의 양의 정수)), 참조 화소 pref(-1, y) = (Ns - 1 - y)/NS x pref(-1, -1) + (y + 1)/NS x pref(-1, NS - 1), for y = 0, … , NS-1 또는 pref(x, -1) = (Ns - 1 - x)/NS x pref(-1, -1) + (x + 1)/NS x pref(NS - 1, -1), for x = 0, … , NS-1로 유도될 수 있다. As another embodiment of applying filtering, bi-linear interpolation filtering may be performed on an encoding / decoding target block having a large block size. For example, a second derivative value in the vertical direction and the horizontal direction can be obtained for an encoding / decoding target block having a block size of N S. When the second derivative is smaller than a certain threshold (eg, | p ref (-1, -1)-2 xp ref (N S / 2, -1) + p ref (N S , -1) | < 2 Bd -C and / or p ref (-1, -1)-2 xp ref (-1, N S / 2) + p ref (-1, N S ) | <2 Bd -C (B d is a bit-depth, 1 <= C <= B d positive integer), reference pixel p ref (-1, y) = (N s -1-y) / N S xp ref (-1, -1) + (y + 1) / N S xp ref (-1, N S -1), for y = 0,... , N S -1 or p ref (x, -1) = (N s -1-x) / N S xp ref (-1, -1) + (x + 1) / N S xp ref (N S- 1, -1), for x = 0,... , N S -1.
예를 들어, 현재 블록의 화면 내 예측 모드, 블록 크기 및 형태 중 적어도 하나에 따라 3-tap 필터, 5-tap 필터, 7-tap 필터, N-탭(N은 양의 정수) 필터 중 적어도 하나 이상을 복수의 참조 샘플 라인의 각각에 대해 다르게 선택하여 적용할 수 있다.For example, at least one of a 3-tap filter, a 5-tap filter, a 7-tap filter, and an N-tap (N is positive integer) filter according to at least one of an intra prediction mode, a block size, and a shape of the current block. The above may be differently selected and applied to each of the plurality of reference sample lines.
이하에서, 화면 내 예측 수행 단계(S1230)에 대해 보다 상세히 설명한다.Hereinafter, an intra prediction prediction step S1230 will be described in more detail.
상기 유도된 화면 내 예측 모드 및 참조 샘플을 기반으로 상기 현재 블록 또는 서브 블록에 대한 화면 내 예측을 수행할 수 있다. 이하 상세한 설명에서 현재 블록은 서브 블록을 의미할 수 있다. An intra prediction may be performed on the current block or sub block based on the derived intra prediction mode and a reference sample. In the following detailed description, the current block may mean a sub block.
예를 들어, 비방향성 화면 내 예측이 수행될 수 있다. 비방향성 화면 내 예측 모드는 DC 모드, Planar 모드 중 적어도 하나일 수 있다. For example, non-directional intra prediction may be performed. The prediction mode in the non-directional view may be at least one of a DC mode and a planar mode.
DC 모드의 화면 내 예측은 상기 구성된 참조 샘플 중 하나 이상의 참조 샘플들의 평균값을 이용하여 수행될 수 있다. 이때, 현재 블록의 경계에 위치한 하나 이상의 예측 샘플에 대해 필터링이 적용될 수 있다. 상기 DC 모드의 화면 내 예측은 현재 블록의 크기 및 형태 중 적어도 하나에 기반하여 적응적으로 수행될 수 있다.The intra prediction of the DC mode may be performed using an average value of one or more reference samples among the configured reference samples. In this case, filtering may be applied to one or more prediction samples located at the boundary of the current block. The intra prediction of the DC mode may be adaptively performed based on at least one of the size and shape of the current block.
도 37은 현재 블록의 형태에 따른 화면 내 예측을 설명하기 위한 예시도이다.37 is an exemplary diagram for describing intra prediction according to a shape of a current block.
예를 들어, 도 37의 (a)에 도시된 바와 같이, 현재 블록의 형태가 정사각형인 경우, 현재 블록의 상단과 좌측의 참조 샘플들의 평균값을 이용하여 예측리 수행될 수 있다.For example, as illustrated in (a) of FIG. 37, when the shape of the current block is square, prediction may be performed using an average value of reference samples on the top and left sides of the current block.
예를 들어, 도 37의 (b)에 도시된 바와 같이, 현재 블록의 형태가 직사각형인 경우, 현재 블록의 가로 및 세로 중 길이가 긴 쪽에 인접한 참조 샘플들의 평균값을 이용하여 예측이 수행될 수 있다.For example, as illustrated in (b) of FIG. 37, when the shape of the current block is a rectangle, the prediction may be performed using an average value of reference samples adjacent to the longer side among the horizontal and vertical lengths of the current block. .
예를 들어, 현재 블록의 크기가 소정의 범위에 해당하는 경우, 현재 블록의 상단 또는 좌측의 참조 샘플 중 소정의 샘플들이 선택되고 선택된 샘플들의 평균값을 이용하여 예측이 수행될 수 있다.For example, when the size of the current block falls within a predetermined range, predetermined samples are selected from reference samples on the top or left side of the current block, and prediction may be performed using an average value of the selected samples.
예를 들어, DC 모드의 화면 내 예측은 상기 구성된 참조 샘플 중 하나 이상의 참조 샘플들의 평균값을 이용하여 수행될 수 있다. 이때, 예컨대, 아래의 수학식 16이 이용될 수 있다. For example, the intra prediction of the DC mode may be performed using an average value of one or more reference samples among the configured reference samples. In this case, for example, Equation 16 below may be used.

이때, 현재 블록의 경계에 위치한 하나 이상의 예측 샘플들에 대해 필터링이 적용될 수 있다. 예를 들어, 현재 블록의 좌측 및/또는 상단의 N개의 복수 열 및/또는 행에 대해서 필터링이 수행될 수 있다. 이때, N은 1보다 큰 양의 정수일 수 있다. In this case, filtering may be applied to one or more prediction samples located at the boundary of the current block. For example, filtering may be performed on the N plurality of columns and / or rows on the left and / or top of the current block. In this case, N may be a positive integer greater than one.
도 38은 DC 모드의 화면 내 예측 시의 필터링을 설명하기 위한 도면이다.FIG. 38 is a diagram for describing filtering during intra prediction in a DC mode. FIG.
예를 들어, N=1인 경우 도 38에 도시된 바와 같이, 대상 블록의 상단 1행 및/또는 좌측 1열에 대하여 필터링이 수행될 수 있다. 상기 필터링은 아래의 수학식 17을 이용하여 수행될 수 있다.For example, when N = 1, as illustrated in FIG. 38, filtering may be performed on the top 1 row and / or the left 1 column of the target block. The filtering may be performed using Equation 17 below.

Planar 모드의 화면 내 예측은 상기 현재 블록의 화면 내 예측 대상 샘플의 위치에 따라 상기 구성된 하나 이상의 참조 샘플로부터의 거리를 고려한 가중합을 계산하여 수행될 수 있다.In-plane prediction in a planar mode may be performed by calculating a weighted sum considering a distance from the configured one or more reference samples according to the position of the prediction target sample in the screen of the current block.
예를 들어, 예측 블록은 예측 대상 샘플의 위치 (x, y)에 의존적인 N개의 참조 샘플들의 가중합 (weighted sum)으로 구할 수 있다. N은 양의 정수일 수 있으며, 예컨대, 4일 수 있다. For example, the prediction block may be obtained as a weighted sum of N reference samples depending on the position (x, y) of the sample to be predicted. N may be a positive integer, for example four.
도 39는 Planar 모드의 화면 내 예측을 설명하기 위한 도면이다.39 is a diagram for describing intra prediction in a planar mode.
예를 들어, 도 39에 도시된 바와 같이, 부호화/복호화 대상 블록의 가로 및 세로의 길이가 4인 경우(NS=4), 예측 블록을 구성하는 각 픽셀 위치 (x, y)에서의 예측 픽셀값은 상단 참조 픽셀(c), 좌측 참조 픽셀(b), 부호화/복호화 대상 블록의 우상단 코너 픽셀(d), 부호화/복호화 대상 블록의 좌하단 코너 픽셀(a)의 가중합으로 유도될 수 있다. 예컨대, 상기 가중합의 유도는 아래의 수학식 18을 이용하여 수행될 수 있다.For example, as shown in FIG. 39, when the width and length of the encoding / decoding target block are 4 (N S = 4), prediction at each pixel position (x, y) constituting the prediction block is performed. The pixel value may be derived by a weighted sum of the upper reference pixel (c), the left reference pixel (b), the upper right corner pixel (d) of the encoding / decoding target block, and the lower left corner pixel (a) of the encoding / decoding target block. have. For example, the derivation of the weighted sum may be performed using Equation 18 below.
예를 들어, 방향성 화면 내 예측이 수행될 수 있다. 방향성 예측 모드는 수평 모드, 수직 모드, 소정의 각도를 가지는 모드 중 적어도 하나 이상의 모드일 수 있다. For example, intra-directional prediction may be performed. The directional prediction mode may be at least one of a horizontal mode, a vertical mode, and a mode having a predetermined angle.
수평/수직 모드의 화면 내 예측은 화면 내 예측 대상 샘플의 위치에서 수평/수직 선상에 존재하는 하나 이상의 참조 샘플을 이용하여 수행될 수 있다. The intra prediction in the horizontal / vertical mode may be performed using one or more reference samples present on the horizontal / vertical line at the location of the intra prediction sample.
소정의 각도를 가지는 모드의 화면 내 예측은 화면 내 예측 대상 샘플의 위치에서 소정의 각도 선 상 및 주변에 존재하는 하나 이상의 참조 샘플을 이용하여 수행될 수 있다. 이때, N개의 참조 샘플이 이용될 수 있다. 상기 N은 2, 3, 4, 5, 6 등의 양의 정수일 수 있다. 또한, 예를 들어 2-tap, 3-tap, 4-tap, 5-tap, 6-tap 필터 등 N-tap 필터를 적용하여 예측이 수행될 수 있다.The intra prediction of the mode having the predetermined angle may be performed using one or more reference samples existing on and around the predetermined angle line at the position of the intra prediction sample. In this case, N reference samples may be used. N may be a positive integer such as 2, 3, 4, 5, 6. In addition, for example, prediction may be performed by applying an N-tap filter such as a 2-tap, 3-tap, 4-tap, 5-tap, 6-tap filter.
예를 들어, 위치 정보에 기반하여 화면 내 예측을 수행할 수 있다. 이때 위치 정보는 부호화/복호화될 수 있으며 상기 위치에 있는 복원된 샘플 블록이 현재 블록의 화면 내 예측 블록으로 유도될 수 있다. 또는 복호화기에서 현재 블록과 유사한 블록을 검색하여 찾아낸 블록이 현재 블록의 화면 내 예측 블록으로 유도될 수 있다. For example, intra prediction may be performed based on location information. In this case, the location information may be encoded / decoded, and the reconstructed sample block at the location may be derived into a prediction block in the screen of the current block. Alternatively, a block found by searching for a block similar to the current block in the decoder may be derived as a prediction block in the screen of the current block.
예를 들어, 색 성분간 화면 내 예측을 수행할 수 있다. 예를 들어, 현재 블록의 복원된 휘도 성분를 이용하여 색차 성분에 대한 화면 내 예측을 수행할 수 있다. 또는, 현재 블록의 복원된 하나의 색차 성분 Cb를 이용하여 다른 색차 성분 Cr에 대한 화면 내 예측을 수행할 수 있다.For example, intra prediction between color components may be performed. For example, an intra prediction of the color difference component may be performed using the reconstructed luminance component of the current block. Alternatively, an intra prediction may be performed on another color difference component Cr by using the restored one color difference component Cb of the current block.
전술한 다양한 화면 내 예측 방법을 하나 이상 결합하여 화면 내 예측을 수행할 수 있다. 예를 들어, 소정의 비방향성 화면 내 예측 모드를 이용하여 예측한 블록과 소정의 방향성 화면 내 예측 모드를 이용하여 예측한 블록의 가중합을 통하여 상기 현재 블록에 대한 화면 내 예측 블록을 구성할 수 있다. 이때, 가중치(weight)는 상기 현재 블록의 화면 내 예측 모드, 블록의 크기, 형태 및/또는 샘플의 위치 중 적어도 하나 이상에 따라서 다르게 적용될 수 있다. Intra-prediction may be performed by combining one or more of the above-described various intra-prediction methods. For example, an intra prediction block for the current block may be configured through a weighted sum of blocks predicted using a predetermined non-directional prediction mode and blocks predicted using a predetermined directional prediction mode. have. In this case, the weight may be differently applied according to at least one or more of the prediction mode, the size, the shape of the block, and / or the location of the sample of the current block.
또는, 상기 하나 이상의 화면 내 예측 모드를 결합함에 있어, 현재 블록에 대한 화면 내 예측 모드를 이용하여 예측한 값과 MPM 리스트에 있는 소정의 모드를 이용하여 예측한 값의 가중합을 통하여 예측 블록을 구성할 수 있다.Alternatively, in combining the one or more intra prediction modes, the prediction block may be obtained through a weighted sum of a value predicted using the intra prediction mode for the current block and a value predicted using the predetermined mode in the MPM list. Can be configured.
또는, 하나 이상의 참조 샘플 셋(set)을 이용하여 화면 내 예측을 수행할 수 있다. 예를 들어, 상기 구성한 참조 샘플에 필터링을 적용하지 않은 참조 샘플로 화면 내 예측한 블록과 필터링을 적용한 참조 샘플로 화면 내 예측한 블록의 가중합을 통하여 상기 현재 블록에 대한 화면 내 예측을 수행할 수 있다.Alternatively, intra prediction may be performed using one or more reference sample sets. For example, an intra prediction may be performed on the current block through a weighted sum of blocks predicted in the screen as reference samples without filtering to the configured reference samples and blocks predicted in the screen as reference samples to which filtering is applied. Can be.
상기 화면 내 예측을 수행하는 과정에서 주변의 복원된 샘플을 이용한 필터링 과정을 수행할 수 있다. 이때, 상기 필터링 과정은 현재 블록의 화면 내 예측 모드, 블록의 크기, 형태 및/또는 샘플의 위치 중 적어도 하나에 따라서 수행되거나 수행되지 않을 수 있다. 상기 필터링 과정은 상기 화면 내 예측을 수행하는 과정에 포함되어 하나의 단계로 수행될 수 있다. 상기 필터링 과정을 수행함에 있어, 현재 블록의 화면 내 예측 모드, 블록의 크기, 형태 중 적어도 하나에 기반하여 필터 탭, 계수, 적용 라인 수, 적용 샘플 수 중 적어도 하나를 적응적으로 결정할 수 있다.In the process of performing the intra prediction, the filtering process using the reconstructed samples of the surroundings may be performed. In this case, the filtering process may or may not be performed according to at least one of the prediction mode, the size, the shape of the block, and / or the location of the sample of the current block. The filtering process may be included in a process of performing the intra prediction, and may be performed as one step. In performing the filtering process, at least one of a filter tap, a coefficient, an applied line number, and an applied sample number may be adaptively determined based on at least one of an intra prediction mode, a block size, and a shape of the current block.
상기 현재 블록이 서브 블록으로 분할되고 각 서브 블록에 대한 화면 내 예측 모드를 주변 블록의 화면 내 예측 모드를 이용하여 유도하여 화면 내 예측을 수행함에 있어, 현재 블록 내의 각 서브 블록에 대해 필터링을 적용할 수 있다. 예를 들어, 현재 블록 전체에 로우패스(low-pass) 필터를 적용할 수 있다. 또는 각 서브 블록의 경계에 위치하는 샘플에 대해 필터를 적용할 수 있다. 또는 각 서브 블록의 예측 블록 또는 복원된 블록에 필터를 적용할 수 있으며, 상기 필터를 적용한 서브 블록의 하나 이상의 샘플은 이후의 서브 블록에 대한 화면 내 예측을 수행하는데 이용할 수 있다.The intra-prediction mode is performed by dividing the current block into sub-blocks and deriving the intra prediction mode for each sub block using the intra prediction mode of the neighboring block, and applying filtering to each sub block in the current block. can do. For example, a low-pass filter may be applied to the entire current block. Alternatively, a filter may be applied to samples located at the boundary of each subblock. Alternatively, a filter may be applied to the prediction block or the reconstructed block of each sub block, and one or more samples of the sub block to which the filter is applied may be used to perform intra prediction on a subsequent sub block.
상기 현재 블록이 서브 블록으로 분할되고 각 서브 블록에 대한 화면 내 예측을 수행함에 있어, 각 서브 블록은 부/복호화 블록, 예측 블록, 변환 블록 중 적어도 하나를 의미할 수 있다. 예를 들어, 상기 현재 블록의 크기가 64x64 이고 서브 블록의 크기가 16x16인 경우, 각 서브 블록인 예측 블록에 대한 화면 내 예측 모드 유도 및/또는 화면 내 예측을 수행할 수 있다. 이때, 상기 하나 이상의 서브 블록이 8x8 또는 4x4로 추가 분할되는 경우, 각 8x8 또는 4x4 블록은 변환 블록을 의미할 수 있으며 상기 16x16 블록의 화면 내 예측 모드를 이용하여 추가 분할된 블록에 대한 화면 내 예측을 수행할 수 있다.When the current block is divided into subblocks and intra prediction is performed on each subblock, each subblock may mean at least one of a sub / decoding block, a prediction block, and a transform block. For example, when the size of the current block is 64x64 and the size of the subblock is 16x16, the intra prediction mode and / or the intra prediction may be performed for the prediction block which is each sub block. In this case, when the one or more subblocks are additionally divided into 8x8 or 4x4, each 8x8 or 4x4 block may mean a transform block and an intra prediction on the additionally divided block using the intra prediction mode of the 16x16 block. Can be performed.
상기 방향성 화면 내 예측을 수행함에 있어, 현재 블록은 N개의 방향성 모드 중 하나 이상의 모드를 이용하여 부호화/복호화될 수 있다. 이때, N은 33, 65 등을 포함하는 양의 정수일 수 있다. 이때, 각 방향성 화면 내 예측 모드는 소정의 각도 값을 가질 수 있다.In performing the intra-directional prediction, the current block may be encoded / decoded using at least one of N directional modes. In this case, N may be a positive integer including 33, 65, and the like. In this case, the prediction mode in each directional screen may have a predetermined angle value.
상기 방향성 화면 내 예측에서, 현재 블록은 M개의 샘플 단위 방향성 모드로 부호화/복호화될 수 있다. 상기 M은 양의 정수일 수 있다. 이때, 샘플 단위의 방향성 모드는 현재 블록 내의 하나 이상의 예측 대상 샘플 단위로 상기 하나 이상의 방향성 화면 내 예측 모드를 이용하여 예측하는 모드를 의미할 수 있다. In the directional intra prediction, the current block may be encoded / decoded in M sample unit directional modes. M may be a positive integer. In this case, the directional mode in a sample unit may mean a mode for predicting by using the at least one prediction mode in the directional screen in units of one or more prediction targets in the current block.
상기 방향성 화면 내 예측을 수행함에 있어, 방향성 예측 모드에 따라 상기 구성한 참조 샘플을 재구성할 수 있다. 예를 들어, 상기 방향성 예측 모드가 좌측 및 상단에 존재하는 참조 샘플을 모두 사용하는 모드인 경우, 좌측 또는 상단의 참조 샘플에 대해 1차원 배열을 구성할 수 있다.In performing the intra-directional prediction, the configured reference sample may be reconstructed according to the directional prediction mode. For example, when the directional prediction mode is a mode that uses both reference samples existing on the left side and the upper side, one-dimensional array may be configured for the reference sample on the left side or the top side.
도 40은 Pref로부터 참조 샘플의 1차원 배열(1-D reference sample array, p1, ref)을 생성하는 일 실시예를 설명하기 위한 도면이다.40 is a view for explaining one embodiment of generating a one-dimensional array (1-D reference sample array, p 1, ref) of the reference sample from P ref.
예를 들어, 도 40에 도시된 바와 같이, 좌측에 존재하는 참조 샘플 중 하나 이상을 이용하여 상단의 참조 샘플에 대한 1차원 배열을 구성할 수 있다. 이때, 좌측 참조 샘플 중 상단의 참조 샘플을 구성하기 위해 사용되는 샘플은 상기 방향성 모드에 따라 달라질 수 있다. 상기 좌측 참조 샘플을 이동하여 상단의 참조 샘플을 구성할 수 있고, 또는 하나 이상의 좌측 참조 샘플의 가중합을 이용하여 상단의 참조 샘플을 구성할 수 있다. For example, as shown in FIG. 40, one or more of the reference samples present on the left side may be used to construct a one-dimensional array of the upper reference sample. In this case, the sample used to configure the upper reference sample among the left reference samples may vary according to the directional mode. The left reference sample may be moved to form an upper reference sample, or a weighted sum of one or more left reference samples may be used to construct an upper reference sample.
상기 방향성 화면 내 예측을 수행함에 있어, 실수 단위의 보간 예측 (interpolated prediction)을 수행할 수 있다. 예를 들어, 각 방향성 예측 모드에 해당하는 각도 파라미터(intraPredAngle)에 기반하여, 현재 블록 안의 샘플 위치에 따라 예측 샘플 보간을 위한 오프셋(offset, iIdx) 및/또는 가중치(weight, iFact) 값을 아래와 같이 결정할 수도 있다. In performing the directional intra prediction, interpolated prediction of a real unit may be performed. For example, based on the angular parameter (intraPredAngle) corresponding to each directional prediction mode, the offset (iIdx) and / or weight (iFact) values for predictive sample interpolation according to the sample position in the current block are shown below. You can also decide together.
예를 들어, 1/32 pel 단위의 보간을 가정할 경우 수직의 방향을 갖는 방향성 모드에 대해서 오프셋과 가중치는 아래의 수학식 19와 같이 결정될 수 있다.For example, in the case of assuming interpolation of 1/32 pel unit, the offset and the weight for the directional mode having the vertical direction may be determined as in Equation 19 below.

상기 수학식 19의 iFact 값에 따라 예측 샘플 값은 다르게 결정될 수 있다. 예를 들어, iFact가 0이 아닌 경우는, 참조 샘플 P1,ref
에서 예측의 위치는 정수 단위(full sample location)가 아닌 실수 단위이다. 따라서, 실수 위치에 인접한 복수의 참조 샘플(예컨대, 좌우에 인접한 두 개의 참조 샘플)을 이용하여 아래의 수학식 20과 같이 대상 샘플 (x, y) 위치에서의 예측 샘플 값을 생성할 수 있다. 이때, 상기 인접한 복수의 참조 샘플은 좌우에 인접한 4개 또는 6개일 수 있다.The prediction sample value may be determined differently according to the iFact value of Equation 19. For example, if iFact is nonzero, reference sample P 1, ref The location of the prediction in is a real unit rather than a full sample location. Accordingly, a prediction sample value at the target sample (x, y) position may be generated using a plurality of reference samples adjacent to the real position (eg, two reference samples adjacent to the left and right) as shown in Equation 20 below. In this case, the plurality of adjacent reference samples may be four or six adjacent to the left and right.
예를 들어, iFact가 0인 경우, 아래의 수학식 21을 이용하여 예측 샘플 값을 생성할 수 있다. 또는, 참조 샘플 P1,ref 및 좌우에 존재하는 참조 샘플을 이용하여 3-tap [1/4:2/4:1/4] 필터를 적용할 수 있다.For example, when iFact is 0, a prediction sample value may be generated using Equation 21 below. Alternatively, the 3-tap [1/4: 2/4: 1/4] filter may be applied using the reference samples P 1, ref and the reference samples existing on the left and right.
방향성 예측 모드 중 수평 및/또는 수직 모드 중 적어도 하나의 경우는 참조 샘플에 대해 필터링을 수행하지 않을 수 있다. 또한, 참조 샘플에 대한 보간 예측이 필요하지 않을 수 있다. 또한, 상단 또는 좌측의 참조 샘플들 만으로 예측이 가능하기 때문에 상기 참조 샘플에 대한 1차원 배열을 구성하는 과정이 필요하지 않을 수 있다.In at least one of the horizontal and / or vertical modes of the directional prediction mode, filtering may not be performed on the reference sample. In addition, interpolation prediction for the reference sample may not be necessary. In addition, since the prediction may be performed using only the upper or left reference samples, a process of configuring a 1D array for the reference samples may not be necessary.
도 41은 예측 블록 내의 샘플 위치에 따라 다른 각도의 참조 샘플을 이용하는 실시예를 설명하기 위한 도면이다.FIG. 41 is a view for explaining an embodiment using reference samples of different angles according to sample positions in a prediction block.
도 41에 도시된 바와 같이, 상기 방향성 화면 내 예측을 수행함에 있어, 방향성 모드를 적용하는 단위를 다르게 할 수 있다. 즉, 상기 대상 블록 내의 샘플, 샘플 그룹, 라인 중 적어도 하나의 단위로 하나 이상의 방향성 모드를 이용하여 예측을 수행할 수 있다.As shown in FIG. 41, in performing the prediction in the directional screen, a unit for applying the directional mode may be different. That is, prediction may be performed using one or more directional modes in units of at least one of samples, sample groups, and lines in the target block.
예를 들어, 현재 블록 단위로 방향성 모드를 이용하여 예측을 수행할 수 있다. 또는, 현재 블록 내의 예측 대상 샘플 라인 단위로 방향성 모드를 이용하여 예측을 수행할 수 있다. 즉, 현재 블록 내의 가로 또는 세로 중 적어도 하나의 라인 마다 서로 다른 방향성 모드를 이용하여 예측을 수행할 수 있다. 또는, 현재 블록 내의 소정의 예측 대상 샘플 그룹 단위로 방향성 모드를 이용하여 예측을 수행할 수 있다. 즉, 현재 블록 내의 N개의 샘플을 포함하는 그룹마다 서로 다른 방향성 모드를 이용하여 예측을 수행할 수 있다. 예를 들어, 현재 블록 내의 예측 대상 샘플 단위로 방향성 모드를 이용하여 예측을 수행할 수 있다. 즉, 현재 블록 내의 예측 대상 샘플마다 서로 다른 방향성 모드를 이용하여 예측을 수행할 수 있다. For example, prediction may be performed using a directional mode on a current block basis. Alternatively, prediction may be performed by using the directional mode in units of the prediction target sample lines in the current block. That is, prediction may be performed by using different directional modes for at least one of the horizontal and vertical lines in the current block. Alternatively, prediction may be performed by using a directional mode in units of a predetermined sample group in the current block. That is, prediction may be performed using different directional modes for groups including N samples in the current block. For example, prediction may be performed by using a directional mode in units of predicted samples in a current block. That is, prediction may be performed by using different directional modes for each prediction target sample in the current block.
상기 현재 블록 단위로 하나의 방향성 예측을 수행하는 경우, 부호화 대상 블록이 영상 특성이 많은 곡선을 포함하는 경우에는 부호화 효율이 떨어질 수 있다. 이를 개선하기 위하여, 상기 대상 블록 내의 샘플, 샘플 그룹, 라인 중 적어도 하나의 단위로 하나 이상의 방향성 모드를 이용하여 예측을 수행할 수 있다.When one directional prediction is performed on the basis of the current block, when the encoding target block includes a curve having many image characteristics, encoding efficiency may be deteriorated. To improve this, prediction may be performed using one or more directional modes in units of at least one of a sample, a sample group, and a line in the target block.
도 41의 (a)는 대상 블록 내의 샘플 단위로 서로 다른 방향성 모드를 이용하는 경우를 예시한다. 도 41의 (a)에 도시된 예에서는, 샘플 단위로 각각의 방향성 모드의 각도에 위치한 참조 샘플을 이용해 예측값을 생성할 수 있다. FIG. 41A illustrates a case where different directional modes are used for each sample unit in the target block. In the example shown in (a) of FIG. 41, a prediction value may be generated using reference samples located at angles of the respective directional modes on a sample basis.
도 41의 (b)는 대상 블록 내의 수평 라인(horizontal line) 단위로 서로 다른 방향성 모드를 이용하는 경우를 예시한다. 도 41의 (b)에 도시된 예에서는, 수평 라인 단위로 각각의 방향성 모드의 각도에 위치한 참조 샘플을 이용해 예측값을 생성할 수 있다. FIG. 41B illustrates a case in which different directional modes are used in units of horizontal lines in the target block. In the example shown in (b) of FIG. 41, a prediction value may be generated using reference samples located at angles of the respective directional modes in units of horizontal lines.
도 41의 (c)는 대상 블록 내의 수직 라인(vertical line) 단위로 서로 다른 방향성 모드를 이용하는 경우를 예시한다. 도 41의 (c)에 도시된 예에서는, 수직 라인 단위로 각각의 방향성 모드의 각도에 위치한 참조 샘플을 이용해 예측값을 생성할 수 있다. FIG. 41C illustrates a case in which different directional modes are used in units of vertical lines in a target block. In the example illustrated in (c) of FIG. 41, a prediction value may be generated using reference samples positioned at angles of the respective directional modes in units of vertical lines.
도 41의 (d)는 대상 블록 내의 대각 라인(diagonal line) 방향의 샘플 그룹 단위로 서로 다른 방향성 모드를 이용하는 경우를 예시한다. 도 41의 (d)에 도시된 예에서는, 대각 라인 방향의 샘플 그룹 단위로 각각의 방향성 모드의 각도에 위치한 참조 샘플을 이용해 예측값을 생성할 수 있다.FIG. 41D illustrates a case in which different directional modes are used in units of sample groups in a diagonal line direction in the target block. In the example illustrated in (d) of FIG. 41, a prediction value may be generated using reference samples located at angles of respective directional modes in units of sample groups in a diagonal line direction.
도 41의 (e)는 대상 블록 내의 직각 라인(L-shape line) 단위로 서로 다른 방향성 모드를 이용하는 경우를 예시한다. 도 41의 (e)에 도시된 예에서는, 직각 라인 단위로 각각의 방향성 모드의 각도에 위치한 참조 샘플을 이용해 예측값을 생성할 수 있다.FIG. 41E illustrates a case where different directional modes are used in units of L-shape lines in the target block. In the example illustrated in (e) of FIG. 41, a prediction value may be generated using reference samples positioned at angles of the respective directional modes in units of right angle lines.
도 41에 도시된 예 이외에, 하나 이상의 샘플을 그룹핑하는 방법은 다양하게 존재할 수 있다. 예컨대, 가로 및/또는 세로를 각각 임의의 회수로 분할하여 생성된 블록 단위로 서로 다른 방향성 모드를 적용할 수 있다.In addition to the example shown in FIG. 41, there may be a variety of methods for grouping one or more samples. For example, different directional modes may be applied in units of blocks generated by dividing the width and / or length by an arbitrary number.
대상 블록 내의 샘플 단위로 서로 다른 방향성 모드를 이용하는 일 실시예로, 곡률 파라미터(cuv)와 가중치 파라미터(cwi)(i=0, 1, … , NS-1, NS: 블록 크기)를 이용하여 예측 블록 내 임의 위치 (x, y)의 예측 값을 생성하기 위한 참조 화소의 위치를 결정할 수 있다. In an embodiment using different directional modes in units of samples in the target block, the curvature parameter cuv and the weight parameter cw i (i = 0, 1,…, N S −1, N S : block size) The position of the reference pixel for generating a prediction value of an arbitrary position (x, y) in the prediction block may be determined.
예를 들어, '우상단에서 좌하단'으로의 화면 내 예측의 경우, 예측 블록 내 임의 위치 (x, y)의 예측 값 생성을 위한 참조 화소의 위치는 행 단위로 아래의 수학식 22와 같이 결정될 수 있다.For example, in the case of the intra prediction from the upper right to the lower left, the position of the reference pixel for generating the prediction value of the arbitrary position (x, y) in the prediction block may be determined as shown in Equation 22 below. Can be.

상기 수학식 22를 이용한 화면 내 예측의 경우, cuv를 조절하여, 곡률의 크기를 조정할 수 있다. cuv는 0보다 크거나 같은 실수를 가질 수 있다. 예를 들어, cuv값이 커질수록 곡률은 커지고, 참조 화소들의 위치는 오른쪽으로 이동할 수 있다. 또한, cuv 값이 작아질수록 곡률은 작아지고, 참조 화소들의 위치는 (최대 x의 위치까지) 왼쪽으로 이동할 수 있다. In the intra prediction using Equation 22, the curvature may be adjusted by adjusting the cuv. cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the positions of the reference pixels may move to the right. In addition, as the cuv value decreases, the curvature decreases, and the position of the reference pixels may move to the left (up to a position of x).
대상 블록이 NxM 인 경우, cwi는 블록의 높이 또는 행의 개수인 N개의 가중치(weight)를 포함하는 파라미터일 수 있다. 각 가중치는 0보다 크거나 같은 실수를 가질 수 있다. cwi를 조절하여, 해당 행에 포함된 예측 화소가 이용하는 참조 화소의 위치를 조절할 수 있다. 예를 들어 cwi
값이 커질수록 ith 행의 예측 화소들이 이용하는 참조 화소들의 위치는 오른쪽으로 이동할 수 있다. 또한, cwi
값이 작아질수록 참조 화소들의 위치는 (최대 x의 위치까지) 왼쪽으로 이동할 수 있다. When the target block is NxM, cw i may be a parameter including N weights that are the height of the block or the number of rows. Each weight may have a real number greater than or equal to zero. By adjusting cw i , the position of the reference pixel used by the prediction pixel included in the corresponding row may be adjusted. For example cw i As the value increases, the positions of the reference pixels used by the prediction pixels of the i th row may move to the right. Also, cw i As the value decreases, the position of the reference pixels may move to the left (up to the position of x).
따라서, 곡률 파라미터(cuv) 및/또는 가중치 행 파라미터(cwi)의 조합으로 다양한 형태의 화면 내 예측을 수행할 수 있다. Therefore, various types of intra prediction may be performed by using a combination of the curvature parameter cuv and / or the weighted row parameter cw i .
도 42는 4x4 크기의 현재 블록에 대해 cuv=0.1, cw0=1.0, cw1=1.2, cw2=1.4, cw3=1.6를 적용하여, 우상단에서 좌하단 방향으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.42 is a diagram illustrating a prediction from the upper right to the lower left by applying cuv = 0.1, cw 0 = 1.0, cw 1 = 1.2, cw 2 = 1.4, and cw 3 = 1.6 for a current block having a size of 4x4. It is a figure for demonstrating an example.
도 43은 도 42의 cuv 및 cwi를 적용한 결과, 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다.FIG. 43 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 42.
예측 화소 값의 생성을 위해, 상술한 1/N pel 단위의 보간 예측 (interpolated prediction)을 수행할 수 있다. N은 양의 정수일 수 있다.In order to generate a prediction pixel value, the above-described interpolated prediction in units of 1 / N pel may be performed. N may be a positive integer.
예를 들어, 예측 대상 화소의 참조 화소의 위치가 정수 단위인 경우, 예측 대상 화소 predSamples[x][y]는 참조 화소 p(pos, -1)로 유도될 수 있다. pos는 참조 화소의 위치를 의미할 수 있다.For example, when the position of the reference pixel of the prediction target pixel is an integer unit, the prediction target pixel predSamples [x] [y] may be derived to the reference pixel p (pos, -1). pos may refer to a position of a reference pixel.
예를 들어, 예측 대상 화소의 참조 화소의 위치가 실수 단위인 경우, predSamples[x][y]은 p(floor(pos), -1)과 p(ceil(pos), -1)에 대하여 1/N pel 단위의 보간 예측된 값으로 유도될 수 있다. floor(pos)는 pos 보다 작거나 같은 정수값으로서 최대의 값을 의미할 수 있다. ceil(pos)는 pos 보다 크거나 같은 정수값으로서 최소의 값을 의미할 수 있다.For example, when the position of the reference pixel of the prediction target pixel is a real unit, predSamples [x] [y] is 1 for p (floor (pos), -1) and p (ceil (pos), -1). It can be derived as an interpolated predicted value in / N pel units. floor (pos) is an integer value less than or equal to pos and may mean a maximum value. ceil (pos) is an integer value greater than or equal to pos and may mean a minimum value.
전술한 바와 같이, 계산의 편의를 위하여 예측 샘플 값을 생성하기 전에 pref 는 p1,
ref 로 변환될 수 있다. As described above, p ref may be converted into p 1 and ref before generating the predictive sample value for convenience of calculation.
만약, 참조 화소의 위치(pos)가 가용한 참조 화소의 최대 범위(도 42의 경우 P(7, -1))를 넘는 경우, 계산된 모든 참조 화소의 위치는 가용한 참조 화소의 최대 범위에 맞춰 정규화(Normalized)된 값들로 변환된 후 이용될 수 있다.If the position pos of the reference pixel exceeds the maximum range of available reference pixels (P (7, -1) in FIG. 42), the calculated positions of all reference pixels are in the maximum range of the available reference pixels. It can be used after it has been converted to normalized values.
예를 들어, '좌상단에서 우하단(type-1)'으로의 화면 내 예측의 경우, 예측 블록 내 임의 위치 (x, y)의 예측 값 생성을 위한 참조 화소의 위치는 행 단위로 아래의 수학식 23과 같이 결정될 수 있다.For example, in the case of the intra prediction from the upper left to the lower right (type-1), the position of the reference pixel for generating a prediction value of an arbitrary position (x, y) in the prediction block is expressed in the following mathematical units. Equation 23 can be determined.

상기 수학식 23을 이용한 화면 내 예측의 경우, cuv를 조절하여, 곡률의 크기를 조정할 수 있다. cuv는 0보다 크거나 같은 실수를 가질 수 있다. 예를 들어, cuv값이 커질수록 곡률은 커지고, 참조 화소들의 위치는 왼쪽으로 이동할 수 있다. 또한, cuv 값이 작아질수록 곡률은 작아지고, 참조 화소들의 위치는 (최대 x의 위치까지) 오른쪽으로 이동할 수 있다. In the intra prediction using Equation 23, the curvature may be adjusted by adjusting the cuv. cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the positions of the reference pixels may move to the left. In addition, as the cuv value decreases, the curvature decreases, and the position of the reference pixels may move to the right (up to the position of x).
대상 블록이 NxM 인 경우, cwi는 블록의 높이 또는 행의 개수인 N개의 가중치(weight)를 포함하는 파라미터일 수 있다. 각 가중치는 0보다 크거나 같은 실수를 가질 수 있다. cwi를 조절하여, 해당 행에 포함된 예측 화소가 이용하는 참조 화소의 위치를 조절할 수 있다. 예를 들어 cwi
값이 커질수록 ith 행의 예측 화소들이 이용하는 참조 화소들의 위치는 왼쪽으로 이동할 수 있다. 또한, cwi
값이 작아질수록 참조 화소들의 위치는 (최대 x의 위치까지) 오른쪽으로 이동할 수 있다.When the target block is NxM, cw i may be a parameter including N weights that are the height of the block or the number of rows. Each weight may have a real number greater than or equal to zero. By adjusting cw i , the position of the reference pixel used by the prediction pixel included in the corresponding row may be adjusted. For example cw i As the value increases, the positions of the reference pixels used by the prediction pixels of the i th row may move to the left. Also, cw i As the value decreases, the positions of the reference pixels may move to the right (up to the position of x).
따라서, 곡률 파라미터(cuv) 및/또는 가중치 행 파라미터(cwi)의 조합으로 다양한 형태의 화면 내 예측을 수행할 수 있다. Therefore, various types of intra prediction may be performed by using a combination of the curvature parameter cuv and / or the weighted row parameter cw i .
도 44는 4x4 크기의 현재 블록에 대해 cuv=0.1, cw0=1.0, cw1=1.2, cw2=1.4, cw3=1.6를 적용하여, 좌상단에서 우하단 방향(type-1)으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.44 shows the prediction from the upper left to the lower right direction (type-1) by applying cuv = 0.1, cw 0 = 1.0, cw 1 = 1.2, cw 2 = 1.4, and cw 3 = 1.6 for the current block having a size of 4x4. A diagram for describing an embodiment of performing the present invention.
도 45은 도 44의 cuv 및 cwi를 적용한 결과, 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다.FIG. 45 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 44.
예측 화소 값의 생성을 위해, 상술한 1/N pel 단위의 보간 예측 (interpolated prediction)을 할 수 있다. N은 양의 정수일 수 있다.In order to generate the prediction pixel value, the above-described interpolated prediction in units of 1 / N pel may be performed. N may be a positive integer.
예를 들어, 예측 대상 화소의 참조 화소의 위치가 정수 단위인 경우, 예측 대상 화소 predSamples[x][y]는 참조 화소 p(pos, -1)로 유도될 수 있다.For example, when the position of the reference pixel of the prediction target pixel is an integer unit, the prediction target pixel predSamples [x] [y] may be derived to the reference pixel p (pos, -1).
예를 들어, 예측 대상 화소의 참조 화소의 위치가 실수 단위인 경우, predSamples[x][y]는 p(floor(pos), -1)과 p(ceil(pos), -1)에 대하여 1/N pel 단위의 보간 예측된 값으로 유도될 수 있다.For example, when the position of the reference pixel of the prediction target pixel is a real unit, predSamples [x] [y] is 1 for p (floor (pos), -1) and p (ceil (pos), -1). It can be derived as an interpolated predicted value in / N pel units.
전술한 바와 같이, 계산의 편의를 위하여 예측 샘플 값을 생성하기 전에 pref 는 p1,
ref 로 변환될 수 있다. As described above, p ref may be converted into p 1 and ref before generating the predictive sample value for convenience of calculation.
만약, 참조 화소의 위치(pos)가 가용한 참조 화소의 최대 범위(도 44의 경우 P(-7, -1))를 넘는 경우, 계산된 모든 참조 화소의 위치는 가용한 참조 화소의 최대 범위에 맞춰 정규화된 값들로 변환된 후 이용될 수 있다.If the position pos of the reference pixel exceeds the maximum range of available reference pixels (P (-7, -1) in FIG. 44), the calculated positions of all reference pixels are the maximum range of the available reference pixels. It can be used after it has been converted to values normalized to.
예를 들어, '좌하단에서 우상단'으로의 화면 내 예측의 경우, 예측 블록 내 임의 위치 (x, y)의 예측 값 생성을 위한 참조 화소의 위치는 열 단위로 아래의 수학식 24와 같이 결정될 수 있다.For example, in the case of the intra prediction from the lower left to the upper right, the position of the reference pixel for generating the prediction value of the arbitrary position (x, y) in the prediction block may be determined as shown in Equation 24 below. Can be.

상기 수학식 24를 이용한 화면 내 예측의 경우, cuv를 조절하여 곡률의 크기를 조정할 수 있다. cuv는 0보다 크거나 같은 실수를 가질 수 있다. 예를 들어, cuv값이 커질수록 곡률은 커지고, 참조 화소들의 위치는 아래쪽으로 이동할 수 있다. 또한, cuv값이 작아질수록 곡률은 작아지고, 참조 화소들의 위치는 (최대 y의 위치까지) 위쪽으로 이동할 수 있다. In the case of the intra prediction using Equation 24, the magnitude of the curvature may be adjusted by adjusting the cuv. cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the positions of the reference pixels may move downward. Further, as the cuv value decreases, the curvature decreases, and the position of the reference pixels can move upward (up to the position of y).
대상 블록이 NxM 인 경우, cwi는 블록의 너비 또는 열의 개수인 M개의 가중치(weight)를 포함하는 파라미터일 수 있다. 각 가중치는 0보다 크거나 같은 실수를 가질 수 있다. cwi를 조절하여, 해당 열에 포함된 예측 화소가 이용하는 참조 화소의 위치를 조절할 수 있다. 예를 들어 cwi
값이 커질수록 ith 열의 예측 화소들이 이용하는 참조 화소들의 위치는 아래쪽으로 이동할 수 있다. 또한, cwi
값이 작아질수록 참조 화소들의 위치는 (최대 y의 위치까지) 위쪽으로 이동할 수 있다. If the target block is NxM, cw i may be a parameter including M weights that are the width of the block or the number of columns. Each weight may have a real number greater than or equal to zero. By adjusting cw i , the position of the reference pixel used by the prediction pixel included in the corresponding column may be adjusted. For example cw i As the value increases, the positions of the reference pixels used by the prediction pixels in column i th may move downward. Also, cw i As the value decreases, the position of the reference pixels may move upward (up to the position of y).
곡률 파라미터(cuv) 및/또는 가중치 열 파라미터(cwi)의 조합으로 다양한 형태의 화면 내 예측을 수행할 수 있다. Various types of intra prediction may be performed by using a combination of the curvature parameter cuv and / or the weight column parameter cw i .
도 46은 4x4 크기의 현재 블록에 대해 cuv=0.1, cw0=1.0, cw1=1.2, cw2=1.4, cw3=1.6를 적용하여, 좌하단에서 우상단 방향으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.FIG. 46 illustrates an embodiment of performing prediction from the lower left to the upper right by applying cuv = 0.1, cw0 = 1.0, cw1 = 1.2, cw2 = 1.4, and cw3 = 1.6 for a current block having a size of 4x4. It is for the drawing.
도 47은 도 46의 cuv 및 cwi를 적용한 결과, 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다. FIG. 47 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 46.
예측 화소값의 생성을 위해, 상술한 1/N pel 단위의 보간 예측 (interpolated prediction)을 수행할 수 있다. N은 양의 정수일 수 있다.In order to generate a prediction pixel value, the above-described interpolated prediction in units of 1 / N pel may be performed. N may be a positive integer.
예를 들어, 예측 대상 화소의 참조 화소의 위치가 정수 단위인 경우, 예측 대상 화소 predSamples[x][y]는 참조 화소 p(-1, pos)로 유도될 수 있다.For example, when the position of the reference pixel of the prediction target pixel is an integer unit, the prediction target pixel predSamples [x] [y] may be derived as the reference pixel p (-1, pos).
예를 들어, 예측 대상 화소의 참조 화소의 위치가 실수 단위인 경우, predSamples[x][y]은 p(-1, floor(pos))과 p(-1, ceil(pos))에 대하여 1/N pel 단위의 보간 예측된 값으로 유도될 수 있다.For example, if the position of the reference pixel of the prediction target pixel is a real unit, predSamples [x] [y] is 1 for p (-1, floor (pos)) and p (-1, ceil (pos)). It can be derived as an interpolated predicted value in / N pel units.
전술한 바와 같이, 계산의 편의를 위하여 예측 샘플 값 생성 전에 pref 는 p1, ref 로 변환될 수 있다. As described above, for convenience of calculation, p ref may be converted into p 1 and ref before generating the predicted sample value.
만약, 참조 화소의 위치(pos)가 가용한 참조 화소의 최대 범위(도 46의 경우 P(-1, 7))를 넘는 경우, 계산된 모든 참조 화소의 위치는 가용한 참조 화소의 최대 범위에 맞춰 정규화된 값들로 변환된 후 이용될 수 있다.If the position pos of the reference pixel exceeds the maximum range of available reference pixels (P (-1, 7) in FIG. 46), the calculated positions of all reference pixels are in the maximum range of the available reference pixels. It can be used after it has been converted to fit-normalized values.
예를 들어, '좌상단에서 우하단 (type-2)'으로의 화면 내 예측의 경우, 예측 블록 내 임의 위치 (x, y)의 예측 값 생성을 위한 참조 화소의 위치는 열 단위로 아래의 수학식 25와 같이 결정될 수 있다.For example, in the case of the intra prediction from the upper left to the lower right (type-2), the position of the reference pixel for generating a prediction value of an arbitrary position (x, y) in the prediction block is expressed in the following mathematical unit: Equation 25 can be determined.

상기 수학식 25를 이용한 화면 내 예측의 경우, cuv를 조절하여 곡률의 크기를 조정할 수 있다. cuv는 0보다 크거나 같은 실수를 가질 수 있다. 예를 들어, cuv값이 커질수록 곡률은 커지고, 참조 화소들의 위치는 위쪽으로 이동할 수 있다. 또한, cuv 값이 작아질수록 곡률은 작아지고, 참조 화소들의 위치는 (최대 y의 위치까지) 아래쪽으로 이동할 수 있다. In the intra prediction using Equation 25, the curvature may be adjusted by adjusting the cuv. cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the positions of the reference pixels may move upward. In addition, as the cuv value decreases, the curvature decreases, and the position of the reference pixels may move downward (up to the position of y).
대상 블록이 NxM 인 경우, cwi는 블록의 너비 또는 열의 개수인 M개의 가중치(weight)를 포함하는 파라미터일 수 있다. 각 가중치는 0보다 크거나 같은 실수를 가질 수 있다. cwi를 조절하여, 해당 열에 포함된 예측 화소가 이용하는 참조 화소의 위치를 조절할 수 있다. 예를 들어 cwi
값이 커질수록 ith 열의 예측 화소들이 이용하는 참조 화소들의 위치는 위쪽으로 이동할 수 있다. 또한, cwi
값이 작아질수록 참조 화소들의 위치는 (최대 y의 위치까지) 아래쪽으로 이동할 수 있다. If the target block is NxM, cw i may be a parameter including M weights that are the width of the block or the number of columns. Each weight may have a real number greater than or equal to zero. By adjusting cw i , the position of the reference pixel used by the prediction pixel included in the corresponding column may be adjusted. For example cw i As the value increases, the positions of the reference pixels used by the prediction pixels of the column i th may move upward. Also, cw i As the value decreases, the position of the reference pixels may move downward (up to the position of y).
따라서, 곡률 파라미터(cuv) 및/또는 가중치 열 파라미터(cwi)의 조합으로 다양한 형태의 화면 내 예측을 수행할 수 있다. Therefore, various types of intra prediction may be performed by using a combination of the curvature parameter cuv and / or the weight column parameter cw i .
도 48은 4x4 크기의 현재 블록에 대해 cuv=0.1, cw0=1.0, cw1=1.2, cw2=1.4, cw3=1.6를 적용하여, 좌상단에서 우하단 (type-2) 방향으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.FIG. 48 illustrates the prediction from the upper left to the lower right (type-2) directions by applying cuv = 0.1, cw0 = 1.0, cw1 = 1.2, cw2 = 1.4, and cw3 = 1.6 for a 4 × 4 current block. It is a figure for demonstrating an Example.
도 49는 도 48의 cuv와 cwi를 적용한 결과, 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다.FIG. 49 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 48.
예측 화소 값의 생성을 위해, 상술한 1/N pel 단위의 보간 예측 (interpolated prediction)을 수행할 수 있다. N은 양의 정수일 수 있다.In order to generate a prediction pixel value, the above-described interpolated prediction in units of 1 / N pel may be performed. N may be a positive integer.
예를 들어, 예측 대상 화소의 참조 화소의 위치가 정수 단위인 경우, 예측 대상 화소 predSamples[x][y]는 참조 화소 p(-1, pos)로 유도될 수 있다.For example, when the position of the reference pixel of the prediction target pixel is an integer unit, the prediction target pixel predSamples [x] [y] may be derived as the reference pixel p (-1, pos).
예를 들어, 예측 대상 화소의 참조 화소의 위치가 실수 단위인 경우, predSamples[x][y]는 p(-1, floor(pos))과 p(-1, ceil(pos))에 대하여 1/N pel 단위의 보간 예측된 값으로 유도될 수 있다.For example, when the position of the reference pixel of the prediction target pixel is a real unit, predSamples [x] [y] is 1 for p (-1, floor (pos)) and p (-1, ceil (pos)). It can be derived as an interpolated predicted value in / N pel units.
전술한 바와 같이, 계산의 편의를 위하여 예측 샘플 값을 생성하기 전에 pref 는 p1,
ref 로 변환될 수 있다. As described above, p ref may be converted into p 1 and ref before generating the predictive sample value for convenience of calculation.
만약, 참조 화소의 위치(pos)가 가용한 참조 화소의 최대 범위(도 48의 경우 P(-1, -7))를 넘는 경우, 계산된 모든 참조 화소의 위치는 가용한 참조 화소의 최대 범위에 맞춰 정규화된 값들로 변환된 후 이용될 수 있다.If the position pos of the reference pixel exceeds the maximum range of available reference pixels (P (-1, -7) in FIG. 48), the calculated positions of all reference pixels are the maximum range of the available reference pixels. It can be used after it has been converted to values normalized to.
예를 들어, '상단에서 좌하단'으로의 화면 내 예측의 경우, 예측 블록 내 임의 위치 (x, y)의 예측 값 생성을 위한 참조 화소의 위치는 행 단위로 아래의 수학식 26과 같이 결정될 수 있다.For example, in the case of the intra prediction from the top to the bottom left, the position of the reference pixel for generating the prediction value of the arbitrary position (x, y) in the prediction block may be determined as shown in Equation 26 below. Can be.
상기 수학식 26을 이용한 화면 내 예측의 경우, cuv를 조절하여, 곡률의 크기를 조정할 수 있다. cuv는 0보다 크거나 같은 실수를 가질 수 있다. 예를 들어, cuv값이 커질수록 곡률은 커지고, 참조 화소들의 위치는 오른쪽으로 이동할 수 있다. 또한, cuv값이 작아질수록 곡률은 작아지고, 참조 화소들의 위치는 (최대 x의 위치까지) 왼쪽으로 이동할 수 있다. In the intra prediction using Equation 26, the curvature may be adjusted by adjusting the cuv. cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the positions of the reference pixels may move to the right. Further, as the cuv value decreases, the curvature decreases, and the position of the reference pixels may move to the left (up to the position of x).
대상 블록이 NxM 인 경우, cwi는 블록의 높이 또는 행의 개수인 N개의 가중치(weight)를 포함하는 파라미터일 수 있다. 각 가중치는 0보다 크거나 같은 실수를 가질 수 있다. cwi를 조절하여, 해당 행에 포함된 예측 화소가 이용하는 참조 화소의 위치를 조절할 수 있다. 예를 들어 cwi값이 커질수록 ith 행의 예측 화소들이 이용하는 참조 화소들의 위치는 오른쪽으로 이동할 수 있다. 또한, cwi값이 작아질수록 참조 화소들의 위치는 (최대 x의 위치까지) 왼쪽으로 이동할 수 있다. When the target block is NxM, cw i may be a parameter including N weights that are the height of the block or the number of rows. Each weight may have a real number greater than or equal to zero. By adjusting cw i , the position of the reference pixel used by the prediction pixel included in the corresponding row may be adjusted. For example, as the value of cw i increases, the positions of reference pixels used by the prediction pixels of row i th may move to the right. Also, as the cw i value decreases, the position of the reference pixels may move to the left (up to the position of x).
따라서, 곡률 파라미터(cuv) 및/또는 가중치 행 파라미터(cwi)의 조합으로 다양한 형태의 화면 내 예측을 수행할 수 있다. Therefore, various types of intra prediction may be performed by using a combination of the curvature parameter cuv and / or the weighted row parameter cw i .
도 50은 4x4 크기의 현재 블록에 대해 cuv=0.6, cw0=1.0, cw1=1.4, cw2=1.8, cw3=2.2를 적용하여, 상단에서 좌하단 방향으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.FIG. 50 illustrates an embodiment of performing prediction from the top to the bottom left by applying cuv = 0.6, cw0 = 1.0, cw1 = 1.4, cw2 = 1.8, and cw3 = 2.2 for a 4 × 4 current block. It is for the drawing.
도 51은 도 50의 cuv와 cwi를 적용한 결과 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다.FIG. 51 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 50.
예측 화소 값의 생성을 위해, 상술한 1/N pel 단위의 보간 예측 (interpolated prediction)을 수행할 수 있다. N은 양의 정수일 수 있다.In order to generate a prediction pixel value, the above-described interpolated prediction in units of 1 / N pel may be performed. N may be a positive integer.
예를 들어, 예측 대상 화소의 참조 화소의 위치가 정수 단위인 경우, 예측 대상 화소 predSamples[x][y]는 참조 화소 p(pos, -1)로 유도될 수 있다.For example, when the position of the reference pixel of the prediction target pixel is an integer unit, the prediction target pixel predSamples [x] [y] may be derived to the reference pixel p (pos, -1).
예를 들어, 예측 대상 화소의 참조 화소의 위치가 실수 단위인 경우, predSamples[x][y]는 p(floor(pos), -1)과 p(ceil(pos), -1)에 대하여 1/N pel 단위의 보간 예측된 값으로 유도될 수 있다.For example, when the position of the reference pixel of the prediction target pixel is a real unit, predSamples [x] [y] is 1 for p (floor (pos), -1) and p (ceil (pos), -1). It can be derived as an interpolated predicted value in / N pel units.
전술한 바와 같이, 계산의 편의를 위하여 예측 샘플 값을 생성하기 전에 pref 는 p1, ref 로 변환될 수 있다. As described above, p ref may be converted into p 1 and ref before generating the predictive sample value for convenience of calculation.
만약, 참조 화소의 위치(pos)가 가용한 참조 화소의 최대 범위(도 50의 경우 P(7, -1))를 넘는 경우, 계산된 모든 참조 화소의 위치는 가용한 참조 화소의 최대 범위에 맞춰 정규화된 값들로 변환된 후 이용될 수 있다.If the position pos of the reference pixel exceeds the maximum range of available reference pixels (P (7, -1) in FIG. 50), the calculated positions of all reference pixels are in the maximum range of the available reference pixels. It can be used after it has been converted to fit-normalized values.
예를 들어, '상단에서 우하단'으로의 화면 내 예측의 경우, 예측 블록 내 임의 위치 (x, y)의 예측 값 생성을 위한 참조 화소의 위치는 행 단위로 아래 수학식 27과 같이 결정될 수 있다.For example, in the case of an intra prediction from the top to the bottom right, the position of the reference pixel for generating a prediction value of an arbitrary position (x, y) in the prediction block may be determined as shown in Equation 27 below. have.
상기 수학식 27을 이용한 화면 내 예측의 경우, cuv를 조절하여, 곡률의 크기를 조정할 수 있다. cuv는 0보다 크거나 같은 실수를 가질 수 있다. 예를 들어, cuv값이 커질수록 곡률은 커지고, 참조 화소들의 위치는 왼쪽으로 이동할 수 있다. 또한, cuv값이 작아질수록 곡률은 작아지고, 참조 화소들의 위치는 (최대 x의 위치까지) 오른쪽으로 이동할 수 있다. In the intra prediction using Equation 27, the curvature may be adjusted by adjusting the cuv. cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the positions of the reference pixels may move to the left. In addition, as the cuv value decreases, the curvature decreases, and the position of the reference pixels may move to the right (up to the position of x).
대상 블록이 NxM 인 경우, cwi는 블록의 높이 또는 행의 개수인 N개의 가중치(weight)를 포함하는 파라미터일 수 있다. 각 가중치는 0보다 크거나 같은 실수를 가질 수 있다. cwi를 조절하여, 해당 행에 포함된 예측 화소가 이용하는 참조 화소의 위치를 조절할 수 있다. 예를 들어 cwi값이 커질수록 ith 행의 예측 화소들이 이용하는 참조 화소들의 위치는 왼쪽으로 이동할 수 있다. 또한, cwi값이 작아질수록 참조 화소들의 위치는 (최대 x의 위치까지) 오른쪽으로 이동할 수 있다. When the target block is NxM, cw i may be a parameter including N weights that are the height of the block or the number of rows. Each weight may have a real number greater than or equal to zero. By adjusting cw i , the position of the reference pixel used by the prediction pixel included in the corresponding row may be adjusted. For example, as the value of cw i increases, the positions of reference pixels used by the prediction pixels of row i th may move to the left. Also, as the cw i value decreases, the position of the reference pixels may move to the right (up to the position of x).
따라서, 곡률 파라미터(cuv) 및/또는 가중치 행 파라미터(cwi)의 조합으로 다양한 형태의 화면 내 예측을 수행할 수 있다. Therefore, various types of intra prediction may be performed by using a combination of the curvature parameter cuv and / or the weighted row parameter cw i .
도 52는 4x4 크기의 현재 블록에 대해 cuv=0.6, cw0=1.0, cw1=1.4, cw2=1.8, cw3=2.2를 적용하여, 상단에서 우하단 방향으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.52 is a diagram for describing an embodiment of performing prediction from the top to the bottom right by applying cuv = 0.6, cw0 = 1.0, cw1 = 1.4, cw2 = 1.8, and cw3 = 2.2 for a current block having a size of 4x4. It is for the drawing.
도 53은 도 52의 cuv와 cwi를 적용한 결과, 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다.FIG. 53 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 52.
예측 화소 값의 생성을 위해, 상술한 1/N pel 단위의 보간 예측 (interpolated prediction)을 수행할 수 있다. N은 양의 정수일 수 있다.In order to generate a prediction pixel value, the above-described interpolated prediction in units of 1 / N pel may be performed. N may be a positive integer.
예를 들어, 예측 대상 화소의 참조 화소의 위치가 정수 단위인 경우, 예측 대상 화소 predSamples[x][y]는 p(pos, -1)로 유도될 수 있다.For example, when the position of the reference pixel of the prediction target pixel is an integer unit, the prediction target pixel predSamples [x] [y] may be derived as p (pos, -1).
예를 들어, 예측 대상 화소의 참조 화소의 위치가 실수 단위인 경우, predSamples[x][y]는 p(floor(pos), -1)과 p(ceil(pos), -1)에 대하여 1/N pel 단위의 보간 예측된 값으로 유도될 수 있다.For example, when the position of the reference pixel of the prediction target pixel is a real unit, predSamples [x] [y] is 1 for p (floor (pos), -1) and p (ceil (pos), -1). It can be derived as an interpolated predicted value in / N pel units.
전술한 바와 같이, 계산의 편의를 위하여 예측 샘플 값을 생성하기 전에 pref 는 p1,
ref 로 변환될 수 있다. As described above, p ref may be converted into p 1 and ref before generating the predictive sample value for convenience of calculation.
만약, 참조 화소의 위치(pos)가 가용한 참조 화소의 최대 범위(도 52의 경우 P(-7,-1))를 넘는 경우, 계산된 모든 참조 화소의 위치는 가용한 참조 화소의 최대 범위에 맞춰 정규화된 값들로 변환된 후 이용될 수 있다.If the position pos of the reference pixel exceeds the maximum range of available reference pixels (P (-7, -1) in FIG. 52), the calculated positions of all reference pixels are the maximum range of the available reference pixels. It can be used after it has been converted to values normalized to.
예를 들어, '좌측에서 우상단'으로의 화면 내 예측의 경우, 예측 블록 내 임의 위치 (x, y)의 예측 값 생성을 위한 참조 화소의 위치는 열 단위로 아래의 수학식 28과 같이 결정될 수 있다.For example, in the case of the intra prediction from the left to the upper right, the position of the reference pixel for generating the prediction value of the arbitrary position (x, y) in the prediction block may be determined as shown in Equation 28 below. have.
상기 수학식 28을 이용한 화면 내 예측의 경우, cuv를 조절하여, 곡률의 크기를 조정할 수 있다. cuv는 0보다 크거나 같은 실수를 가질 수 있다. 예를 들어, cuv값이 커질수록 곡률은 커지고 참조 화소들의 위치는 아래쪽으로 이동할 수 있다. 또한, cuv값이 작아질수록 곡률은 작아지고, 참조 화소들의 위치는 (최대 y의 위치까지) 위쪽으로 이동할 수 있다. In the intra prediction using Equation 28, the magnitude of the curvature may be adjusted by adjusting the cuv. cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the position of the reference pixels may move downward. Further, as the cuv value decreases, the curvature decreases, and the position of the reference pixels can move upward (up to the position of y).
대상 블록이 NxM 인 경우, cwi는 블록의 너비 또는 열의 개수인 M개의 가중치(weight)를 포함하는 파라미터일 수 있다. 각 가중치는 0보다 크거나 같은 실수를 가질 수 있다. cwi를 조절하여, 해당 열에 포함된 예측 화소가 이용하는 참조 화소의 위치를 조절할 수 있다. 예를 들어 cwi값이 커질수록 ith 열의 예측 화소들이 이용하는 참조 화소들의 위치는 아래쪽으로 이동할 수 있다. 또한, cwi값이 작아질수록 참조 화소들의 위치는 (최대 y의 위치까지) 위쪽으로 이동할 수 있다. If the target block is NxM, cw i may be a parameter including M weights that are the width of the block or the number of columns. Each weight may have a real number greater than or equal to zero. By adjusting cw i , the position of the reference pixel used by the prediction pixel included in the corresponding column may be adjusted. For example, as the value of cw i increases, the positions of the reference pixels used by the prediction pixels of the column i th may move downward. Also, as the cw i value decreases, the position of the reference pixels may move upward (up to the position of y).
따라서, 곡률 파라미터(cuv)와 가중치 열 파라미터(cwi)의 조합으로 다양한 형태의 화면 내 예측을 수행할 수 있다. Therefore, various types of intra prediction may be performed by combining the curvature parameter cuv and the weight column parameter cw i .
도 54는 4x4 크기의 현재 블록에 대해 cuv=0.6 cw0=1.0, cw1=1.4, cw2=1.8, cw3=2.2를 적용하여, 좌측에서 우상단 방향으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.FIG. 54 is a diagram for explaining an embodiment of performing prediction from the left to the upper right direction by applying cuv = 0.6 cw0 = 1.0, cw1 = 1.4, cw2 = 1.8, and cw3 = 2.2 to a 4 × 4 current block. to be.
도 55는 도 54의 cuv와 cwi를 적용한 결과, 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다.FIG. 55 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 54.
예측 화소 값의 생성을 위해, 상술한 1/N pel 단위의 보간 예측 (interpolated prediction)을 수행할 수 있다. N은 양의 정수일 수 있다.In order to generate a prediction pixel value, the above-described interpolated prediction in units of 1 / N pel may be performed. N may be a positive integer.
예를 들어, 예측 대상 화소의 참조 화소의 위치가 정수 단위인 경우, 예측 대상 화소 predSamples[x][y]는 참조 화소 p(-1, pos)로 유도될 수 있다.For example, when the position of the reference pixel of the prediction target pixel is an integer unit, the prediction target pixel predSamples [x] [y] may be derived as the reference pixel p (-1, pos).
예를 들어, 예측 대상 화소의 참조 화소의 위치가 실수 단위인 경우, predSamples[x][y]는 p(-1, floor(pos))과 p(-1, ceil(pos))에 대하여 1/N pel 단위의 보간 예측된 값으로 유도될 수 있다.For example, when the position of the reference pixel of the prediction target pixel is a real unit, predSamples [x] [y] is 1 for p (-1, floor (pos)) and p (-1, ceil (pos)). It can be derived as an interpolated predicted value in / N pel units.
전술한 바와 같이, 계산의 편의를 위하여 예측 샘플 값을 생성하기 전에 pref 는 p1,
ref 로 변환될 수 있다. As described above, p ref may be converted into p 1 and ref before generating the predictive sample value for convenience of calculation.
만약, 참조 화소의 위치(pos)가 가용한 참조 화소의 최대 범위(도 54의 경우 P(-1, 7))를 넘어서는 경우, 계산된 모든 참조 화소의 위치는 가용한 참조 화소의 최대 범위에 맞춰 정규화된 값들로 변환된 후 이용될 수 있다.If the position pos of the reference pixel exceeds the maximum range of available reference pixels (P (-1, 7) in FIG. 54), the calculated positions of all reference pixels are in the maximum range of the available reference pixels. It can be used after it has been converted to fit-normalized values.
예를 들어, '좌측에서 우하단'으로의 화면 내 예측의 경우, 예측 블록 내 임의 위치 (x, y)의 예측 값 생성을 위한 참조 화소의 위치는 열 단위로 아래의 수학식 29와 같이 결정될 수 있다.For example, in the case of the intra prediction from the left to the bottom right, the position of the reference pixel for generating a prediction value of an arbitrary position (x, y) in the prediction block may be determined as shown in Equation 29 below. Can be.
상기 수학식 29를 이용한 화면 내 예측의 경우, cuv를 조절하여, 곡률의 크기를 조정할 수 있다. cuv는 0보다 크거나 같은 실수를 가질 수 있다. 예를 들어, cuv값이 커질수록 곡률은 커지고, 참조 화소들의 위치는 위쪽으로 이동할 수 있다. 또한, cuv값이 작아질수록 곡률은 작아지고, 참조 화소들의 위치는 (최대 y의 위치까지) 아래쪽으로 이동할 수 있다. In the intra prediction using Equation 29, the curvature may be adjusted by adjusting the cuv. cuv can have a real number greater than or equal to zero. For example, as the cuv value increases, the curvature increases, and the positions of the reference pixels may move upward. Also, as the cuv value decreases, the curvature decreases, and the position of the reference pixels can move downward (up to the position of y).
대상 블록이 NxM 인 경우, cwi는 블록의 너비 또는 열의 개수인 M개의 가중치(weight)를 포함하는 파라미터일 수 있다. 각 가중치는 0보다 크거나 같은 실수를 가질 수 있다. cwi를 조절하여, 해당 열에 포함된 예측 화소가 이용하는 참조 화소의 위치를 조절할 수 있다. 예를 들어 cwi값이 커질수록 ith 열의 예측 화소들이 이용하는 참조 화소들의 위치는 위쪽으로 이동할 수 있다. 또한, cwi값이 작아질수록 참조 화소들의 위치는 (최대 y의 위치까지) 아래쪽으로 이동할 수 있다. If the target block is NxM, cw i may be a parameter including M weights that are the width of the block or the number of columns. Each weight may have a real number greater than or equal to zero. By adjusting cw i , the position of the reference pixel used by the prediction pixel included in the corresponding column may be adjusted. For example, as the value of cw i increases, the positions of the reference pixels used by the prediction pixels of the column i th may move upward. In addition, as the value of cw i decreases, the position of the reference pixels may move downward (up to the position of y).
따라서, 곡률 파라미터(cuv)와 가중치 열 파라미터(cwi)의 조합으로 다양한 형태의 화면 내 예측을 수행할 수 있다. Therefore, various types of intra prediction may be performed by combining the curvature parameter cuv and the weight column parameter cw i .
도 56은 4x4 크기의 현재 블록에 대해 cuv=0.6, cw0=1.0, cw1=1.4, cw2=1.8, cw3=2.2를 적용하여, 좌측에서 우하단 방향으로의 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.56 illustrates an embodiment of performing prediction from left to right bottom by applying cuv = 0.6, cw0 = 1.0, cw1 = 1.4, cw2 = 1.8, and cw3 = 2.2 for a 4 × 4 current block. It is for the drawing.
도 57은 도 56의 cuv와 cwi를 적용한 결과, 현재 블록 내 예측 화소가 이용하는 참조 화소의 위치의 일 실시예를 도시한 도면이다.FIG. 57 is a diagram illustrating an embodiment of a position of a reference pixel used by a prediction pixel in a current block as a result of applying cuv and cw i of FIG. 56.
예측 화소 값의 생성을 위해, 상술한 1/N pel 단위의 보간 예측 (interpolated prediction)을 수행할 수 있다. N은 양의 정수일 수 있다.In order to generate a prediction pixel value, the above-described interpolated prediction in units of 1 / N pel may be performed. N may be a positive integer.
예를 들어, 예측 대상 화소의 참조 화소의 위치가 정수 단위인 경우, 예측 대상 화소 predSamples[x][y]는 참조 화소 p(-1, pos)로 유도될 수 있다.For example, when the position of the reference pixel of the prediction target pixel is an integer unit, the prediction target pixel predSamples [x] [y] may be derived as the reference pixel p (-1, pos).
예를 들어, 예측 대상 화소의 참조 화소의 위치가 실수 단위인 경우, predSamples[x][y]는 p(-1, floor(pos))과 p(-1, ceil(pos))에 대하여 1/N pel 단위의 보간 예측된 값으로 유도될 수 있다.For example, when the position of the reference pixel of the prediction target pixel is a real unit, predSamples [x] [y] is 1 for p (-1, floor (pos)) and p (-1, ceil (pos)). It can be derived as an interpolated predicted value in / N pel units.
전술한 바와 같이, 계산의 편의를 위하여 예측 샘플 값을 생성하기 전에 pref 는 p1,
ref 로 변환될 수 있다. As described above, p ref may be converted into p 1 and ref before generating the predictive sample value for convenience of calculation.
만약, 참조 화소의 위치(pos)가 가용한 참조 화소의 최대 범위(도 56의 경우 P(-1, -7))를 넘는 경우, 계산된 모든 참조 화소의 위치는 가용한 참조 화소의 최대 범위에 맞춰 정규화된 값들로 변환된 후 이용될 수 있다.If the position pos of the reference pixel exceeds the maximum range of available reference pixels (P (-1, -7) in FIG. 56), the calculated positions of all reference pixels are the maximum range of the available reference pixels. It can be used after it has been converted to values normalized to.
도 42 내지 도 57을 참조하여 설명한 실시예에서는 현재 블록에 대해 1개의 곡률 파라미터(cuv)가 적용되고, 현재 블록의 행 또는 열에 대해 1개의 가중치 파라미터(cw)가 적용된다. 그러나, 반드시 이에 한정되는 것은 아니다. 즉, 현재 블록에 대해 하나 이상의 곡률 파라미터(cuvi) 및/또는 하나 이상의 가중치 파라미터(cwi)가 적용될 수 있다. 예컨대, 도 41을 참조하여 설명한 바와 같이, 현재 블록의 화소 단위, 수평 라인 단위, 수직 라인 단위, 대각 라인 단위, 직각 라인 단위, 서브 블록 단위 및/또는 임의의 화소 그룹 단위로 각각 상이한 곡률 파라미터(cuvi) 및/또는 가중치 파라미터(cwi)가 적용될 수 있다.In the embodiment described with reference to FIGS. 42 to 57, one curvature parameter cuv is applied to the current block, and one weight parameter cw is applied to the row or column of the current block. However, it is not necessarily limited thereto. That is, one or more curvature parameters cuv i and / or one or more weight parameters cw i may be applied to the current block. For example, as described with reference to FIG. 41, different curvature parameters may be provided in pixel units, horizontal line units, vertical line units, diagonal line units, right angle line units, sub block units, and / or any pixel group units of the current block. cuv i ) and / or weight parameter cw i may be applied.
도 58은 대상 블록 내의 샘플 단위로 서로 다른 방향성 모드를 이용하는 또 다른 실시예를 설명하기 위한 도면이다.FIG. 58 illustrates another embodiment using different directional modes in units of samples in a target block.
도 58에 도시된 바와 같이 블록 단위로 선택된 화면 내 예측 모드를 기반으로 샘플 단위 화면 내 예측을 수행할 수 있다. 이때, 샘플 단위 화면 내 예측은 추가적으로 수행될 수도 있다.As illustrated in FIG. 58, intra-sample prediction may be performed based on the intra prediction mode selected on a block basis. In this case, the prediction in the sample unit screen may be additionally performed.
예를 들어, 선택된 화면 내 예측 모드가 비방향성 모드 (PLANAR_MODE 혹은 DC_MODE)일 경우, 샘플 단위의 예측만 수행하지 않을 수 있다. For example, when the selected intra prediction mode is a non-directional mode (PLANAR_MODE or DC_MODE), only prediction of a sample unit may not be performed.
도 58의 (a)에서, 선택된 블록의 화면 내 예측 모드가 A의 범위에 포함되는 경우, 좌하단->우상단 방향 및 좌측->우상단 방향으로의 샘플 단위의 예측들 중 적어도 하나 이상을 수행할 수 있다. In (a) of FIG. 58, when the intra prediction mode of the selected block is included in the range of A, at least one or more of predictions in a sample unit in the lower left-> upper right direction and the left-> upper right direction are performed. Can be.
또는, 도 58의 (a)에서, 선택된 블록의 화면 내 예측 모드가 B의 범위에 포함되는 경우, 좌상단->우하단(Type2) 방향 및 좌측->우하단 방향으로의 샘플 단위의 예측들 중 적어도 하나 이상을 수행할 수 있다. Alternatively, in (a) of FIG. 58, when the intra prediction mode of the selected block is included in the range of B, among predictions in the sample unit in the upper left-> lower right (Type2) direction and the left-> lower right direction. At least one or more may be performed.
또는, 도 58의 (a)에서, 선택된 블록의 화면 내 예측 모드가 C의 범위에 포함되는 경우, 좌상단->우하단(Type1) 방향 및 상단->우하단 방향으로의 샘플 단위의 예측들 중 적어도 하나 이상을 수행할 수 있다. Alternatively, in (a) of FIG. 58, when the intra prediction mode of the selected block is included in the range of C, among predictions in the sample unit in the upper left-> lower right (Type1) direction and the upper-lower right direction; At least one or more may be performed.
또는, 도 58의 (a)에서, 선택된 블록의 화면 내 예측 모드가 D의 범위에 포함되는 경우, 우상단->좌하단 방향 및 상단->좌하단 방향으로의 샘플 단위의 예측들 중 적어도 하나 이상을 수행할 수 있다. Alternatively, in (a) of FIG. 58, when the intra prediction mode of the selected block is included in the range of D, at least one or more of predictions in a sample unit in the upper right-> lower left direction and the upper-> lower left direction. Can be performed.
또는, 도 58의 (b)에서, 선택된 블록의 화면 내 예측 모드가 A의 범위에 포함되는 경우, 좌측->우하단 및 좌측->우상단 방향으로의 샘플 단위의 예측들 중 적어도 하나 이상을 수행할 수 있다. Alternatively, in (b) of FIG. 58, when the intra prediction mode of the selected block is included in the range of A, at least one or more predictions of the sample units in the left-> right-bottom and left-> top-right directions are performed. can do.
또는, 도 58의 (b)에서, 선택된 블록의 화면 내 예측 모드가 B의 범위에 포함되는 경우, 상단->좌하단 및 상단->우하단 방향으로의 샘플 단위의 예측들 중 적어도 하나 이상을 수행할 수 있다.Alternatively, in (b) of FIG. 58, when the intra prediction mode of the selected block is included in the range of B, at least one or more of predictions in a sample unit in the top-> bottom left and top-> bottom directions are performed. Can be done.
도 59는 잔차 신호를 예측하는 실시예를 설명하기 위한 도면이다.59 is a view for explaining an embodiment of predicting a residual signal.
화면 내 예측으로부터 구성되는 잔차 신호(residual signal)에 대해 추가적으로 잔차 신호 예측이 수행될 수 있다. The residual signal prediction may be additionally performed on the residual signal configured from the intra prediction.
*화면 내 예측은, 기-부호화/복호화된 인접 블록들의 샘플들을 참조 샘플로 이용하여 현재 블록을 예측한다. 따라서, 현재 블록의 샘플과 참조 샘플과의 거리가 멀어질수록 잔차 신호가 커지는 경향이 있고 이로 인해 부호화 효율이 떨어질 수 있다. In-picture prediction predicts the current block using samples of pre-coded / decoded neighboring blocks as reference samples. Therefore, as the distance between the sample of the current block and the reference sample increases, the residual signal tends to increase, which may result in a decrease in coding efficiency.
잔차 신호를 더 줄이기 위한 목적으로, 현재 블록 또는 서브 블록 단위로 잔차 신호의 예측을 추가적으로 수행할 수 있다. In order to further reduce the residual signal, prediction of the residual signal may be additionally performed in units of a current block or a sub block.
현재 블록 이전에 기-부호화/복호화되어 복원된 인접 블록들 (reconstructed blocks)을 대상으로 검색 범위(search range)를 설정할 수 있다. 검색 범위는 현재 블록의 크기, 형태, 분할 깊이 및/또는 화면 내 예측 모드에 따라 다르게 설정될 수 있다.A search range may be set for neighboring blocks that are pre-coded / decoded and reconstructed before the current block. The search range may be set differently according to the size, shape, split depth, and / or intra prediction mode of the current block.
예를 들어, 현재 블록 이전에 복원된 모든 블록들을 검색 범위로 설정할 수 있다. 검색 범위에 현재 블록의 좌측에 위치한 블록, 좌상단에 위치한 블록, 상단에 위치한 블록 및/또는 우상단에 위치한 블록이 검색 범위에 포함된 경우, 복원 블록의 일부 영역은 현재 블록 또는 아직 부호화가 시작되지 않은 현재 블록 이후의 블록들을 포함할 수 있다. 이 경우, 해당되는 샘플값을 복원 블록 내의 가용한 샘플값을 이용하여 패딩(padding)하여 채워 넣거나 또는 상기 블록들은 검색 범위에서 제외시킬 수 있다. For example, all blocks restored before the current block may be set as a search range. If the search range includes blocks located to the left of the current block, blocks located at the top left, blocks located at the top, and / or blocks located at the top right, some areas of the reconstructed block may not be currently encoded or have not yet been encoded. It may include blocks after the current block. In this case, the corresponding sample value may be padded by using the available sample value in the reconstruction block, or the blocks may be excluded from the search range.
예를 들어, 현재 블록 이전에 복원된 블록들 중 N개의 블록들을 검색 범위로 설정할 수 있다. 이때, N은 1 이상의 양의 정수일 수 있다. For example, N blocks among the blocks restored before the current block may be set as a search range. In this case, N may be a positive integer of 1 or more.
예를 들어, 도 59에 도시된 바와 같이, 현재 블록 (CUR_BLK)의 가로의 길이가 W, 세로의 길이가 H이고 현재 블록 좌상단 화소의 위치를 (0, 0)으로 정의할 때, (-2*W, -2*H), (-W, -2*H), (0, -2*H), (W, -2*H), (-2*W, -H), (-W, -H), (0, -H), (W, -H), (-2*W, 0), (-W, 0) 위치의 화소를 포함하는 10개의 복원 블록이 검색 범위로 설정될 수 있다. For example, as illustrated in FIG. 59, when the horizontal length of the current block CUR_BLK is W, the vertical length is H, and the position of the upper left pixel of the current block is defined as (0, 0), (-2 * W, -2 * H), (-W, -2 * H), (0, -2 * H), (W, -2 * H), (-2 * W, -H), (-W 10 reconstruction blocks containing pixels at positions (-H), (0, -H), (W, -H), (-2 * W, 0), (-W, 0) Can be.
예를 들어, 현재 블록이 가로(W)와 세로(H)의 길이가 서로 다른 비정방형 블록인 경우, W 및/또는 H값에 의존적으로 검색 범위가 설정될 수 있다. 예를 들어, WxH의 비정방형 블록의 경우, 검색 범위는 복원된 인접 블록들 영역에서 (K*W)x(L*H)로 설정될 수 있다. 이때, K와 L은 각각 1이상의 양의 정수일 수 있다. For example, when the current block is a non-square block having different lengths W and H, the search range may be set depending on the W and / or H values. For example, for a non-square block of WxH, the search range may be set to (K * W) x (L * H) in the reconstructed adjacent blocks area. In this case, K and L may each be a positive integer of 1 or more.
전술한 다양한 화면 내 예측 모드들 중 화면 내 예측을 수행하여 결정된 현재 블록의 화면 내 예측 모드 (predModeIntra)를 이용하여 현재 블록의 예측 블록을 구성할 수 있다.The prediction block of the current block may be configured by using the intra prediction mode (predModeIntra) of the current block determined by performing the intra prediction among the aforementioned various intra prediction modes.
예를 들어, 도 59에서, predModeIntra를 이용하여 구성한 예측 블록은 PRD_BLK_best로 나타낼 수 있다.For example, in FIG. 59, a prediction block configured using predModeIntra may be represented as PRD_BLK_best.
predModeIntra를 통해 구성한 상기 예측 블록(PRD_BLK_best) 외에 추가적으로 현재 블록의 예측 블록을 하나 이상 구성할 수 있다. In addition to the prediction block PRD_BLK_best configured through predModeIntra, one or more prediction blocks of the current block may be configured.
예를 들어, 모든 방향성/비방향성 화면 내 예측 모드 중 적어도 하나를 이용해 적어도 하나의 추가 예측 블록을 구성할 수 있다. For example, at least one additional prediction block may be configured using at least one of prediction modes in all directional / non-directional pictures.
예를 들어, predModeIntra를 기준으로 predModeIntra에 인접한 N개의 화면 내 예측 모드를 이용하여 추가 예측 블록을 구성할 수 있다. 이때, N은 1 이상의 양의 정수일 수 있다. 예를 들어, 도 59와 같이, N=2인 경우, 2개의 추가 예측 블록(PRD_BLK_plus_one, PRD_BLK_minus_one)이 구성될 수 있다. 일 예로, predModeIntra가 방향성 모드인 경우, predModeIntra+1을 이용해서 추가 예측 블록(PRD_BLK_plus_one)을 구성하고, predModeIntra-1를 이용해서 또 다른 추가 예측 블록을 구성 할 수 있다. 상기 predModeIntra에 더해지거나 빼지는 수는 1이상의 양의 정수일 수 있다.For example, an additional prediction block may be configured using N intra prediction modes adjacent to predModeIntra based on predModeIntra. In this case, N may be a positive integer of 1 or more. For example, as shown in FIG. 59, when N = 2, two additional prediction blocks PRD_BLK_plus_one and PRD_BLK_minus_one may be configured. For example, when predModeIntra is a directional mode, an additional prediction block (PRD_BLK_plus_one) may be configured using predModeIntra + 1, and another additional prediction block may be configured using predModeIntra-1. The number added to or subtracted from the predModeIntra may be a positive integer of 1 or more.
예를 들어, predModeIntra와 이루는 각도를 기준으로 인접한 N개의 화면 내 예측 모드를 이용하여 추가 예측 블록을 구성할 수 있다. 이때, N은 1 이상의 양의 정수일 수 있다. 이때, 각도가 θ인 경우 predModeIntra 기준 -θ에서 +θ 각도 범위 안에 포함되는 화면 내 예측 모드를 이용하여 추가 예측 블록을 구성할 수 있다.For example, an additional prediction block may be configured using N adjacent intra prediction modes based on an angle formed with predModeIntra. In this case, N may be a positive integer of 1 or more. In this case, when the angle is θ, the additional prediction block may be configured by using the intra prediction mode included in the θ angle range from the predModeIntra reference −θ to + θ.
예를 들어, N개의 화면 내 모드를 이용하여 구성된 N개의 추가 예측 블록을 조합함으로써, M개의 추가 예측 블록을 구성할 수 있다. 이때, M과 N은 양의 정수 일 수 있다. 일 예로, predModeIntra가 비방향성 모드인 PLANAR_MODE인 경우, DC_MODE를 이용해서 추가 예측 블록(PRD_BLK_plus_one)을 구성하고 PRD_BLK_best와 PRD_BLK_plus_one의 가중합으로 또 다른 추가 예측 블록(PRD_BLK_minus_one)을 구성할 수 있다. 또는, predModeIntra가 비방향성 모드인 DC_MODE인 경우, PLANAR_MODE를 이용해서 추가 예측 블록(PRD_BLK_plus_one)을 구성하고 PRD_BLK_best와 PRD_BLK_plus_one의 가중합으로 또 다른 추가 예측 블록(PRD_BLK_minus_one)을 구성할 수 있다. 또는, predModeIntra가 방향성 모드인 ANGULAR_MODE인 경우, ANGULAR_MODE를 이용해서 추가 예측 블록(PRD_BLK_plus_one)을 구성하고 PRD_BLK_best와 PRD_BLK_plus_one의 가중합으로 또 다른 추가 예측 블록(PRD_BLK_minus_one)을 구성할 수 있다.For example, M additional prediction blocks may be configured by combining N additional prediction blocks configured using N intra picture modes. At this time, M and N may be a positive integer. For example, when predModeIntra is PLANAR_MODE, which is a non-directional mode, an additional prediction block PRD_BLK_plus_one may be configured using DC_MODE, and another additional prediction block PRD_BLK_minus_one may be configured by a weighted sum of PRD_BLK_best and PRD_BLK_plus_one. Alternatively, when predModeIntra is a non-directional mode DC_MODE, an additional prediction block PRD_BLK_plus_one may be configured using PLANAR_MODE, and another additional prediction block PRD_BLK_minus_one may be configured by a weighted sum of PRD_BLK_best and PRD_BLK_plus_one. Alternatively, when predModeIntra is ANGULAR_MODE, which is a directional mode, an additional prediction block PRD_BLK_plus_one may be configured using ANGULAR_MODE, and another additional prediction block PRD_BLK_minus_one may be configured by a weighted sum of PRD_BLK_best and PRD_BLK_plus_one.
현재 블록과 상기 구성된 복수 개의 예측 블록들 중 적어도 하나 이상을 이용하여 복수 개의 차분 블록을 구할 수 있다. 예를 들어 모든 방향성/비방향성 모드를 이용해 구성된 예측 블록들과 현재 블록 사이의 차분 블록들을 구성할 수 있다. 예를 들어, predModeIntra 및 각도 또는 화면 내 예측 모드 기준으로 predModeIntra와 인접한 N개의 화면 내 예측 모드를 이용하여 구성된 N+1개의 예측 블록들과 현재 블록 사이의 차분 블록들을 구성할 수 있다. 이때, N은 1 이상의 양의 정수일 수 있다. 예를 들어, 도 59와 같이, N=2인 경우, 3개의 차분 블록을 아래와 같이 구성할 수 있다. A plurality of difference blocks may be obtained using at least one of the current block and the configured plurality of prediction blocks. For example, it is possible to construct differential blocks between the current block and the predicted blocks configured using all the directional / non-directional mode. For example, the differential blocks between the N + 1 prediction blocks and the current block configured by using N intra prediction modes adjacent to predModeIntra based on predModeIntra and an angle or intra prediction mode may be configured. In this case, N may be a positive integer of 1 or more. For example, as shown in FIG. 59, when N = 2, three difference blocks can be configured as follows.
예를 들어, 현재 블록과 PRD_BLK_best 사이의 차분 블록 RES_BLK_best를 구할 수 있다. 예를 들어, 현재 블록과 PRD_BLK_plus_one 사이의 차분 블록 RES_BLK_plusone를 구할 수 있다. 예를 들어, 현재 블록과 PRD_BLK_minus_one 사이의 차분 블록 RES_BLK_minusone를 구할 수 있다.For example, the difference block RES_BLK_best between the current block and PRD_BLK_best can be obtained. For example, the difference block RES_BLK_plusone between the current block and PRD_BLK_plus_one can be obtained. For example, the difference block RES_BLK_minusone between the current block and PRD_BLK_minus_one can be obtained.
예를 들어, N개의 화면 내 모드를 이용하여 N개의 추가 예측 블록을 구성하고, 구성된 N개의 예측 블록들의 조합으로 M개의 추가 예측 블록을 구성한 후(단, M과 N은 양의 정수), 이 예측 블록들과 현재 블록 사이의 차분 블록들을 구성할 수 있다.For example, N additional prediction blocks are constructed using N intra-picture modes, and M additional prediction blocks are constructed from the combination of N predicted blocks (where M and N are positive integers). It is possible to configure difference blocks between the prediction blocks and the current block.
검색 범위 내 모든 샘플들에 대해 최적의 IDV(Intra Displacement Vector)를 구하는 과정이 수행될 수 있다. 이때, IDV는 도 59와 같이, 현재 블록의 좌상단 샘플 위치로부터 검색 범위 내 샘플 위치까지의 벡터(x, y)로 정의될 수 있다.A process of obtaining an optimal intradisplacement vector (IDV) for all samples within the search range may be performed. At this time, IDV may be defined as a vector (x, y) from the upper left sample position of the current block to the sample position within the search range, as shown in FIG. 59.
각 IDV마다, IDV가 가리키는 샘플 위치를 (0,0)으로 하여, 현재 블록과 동일한 크기를 갖는 복원 블록(REC_BLK)를 구성할 수 있다. For each IDV, the recovery block REC_BLK having the same size as the current block can be configured by setting the sample position indicated by the IDV to (0,0).
PRD_BLK_best 및 추가로 구성한 예측 블록들 중 적어도 하나 이상을 이용하여 상기 IDV가 가리키는 위치에서 구성된 복원 블록(REC_BLK)에 대한 하나 이상의 잔차 신호 블록(RES_BLK_IDV)을 구성할 수 있다. One or more residual signal blocks RES_BLK_IDV for the reconstructed block REC_BLK configured at the position indicated by the IDV may be configured using at least one of PRD_BLK_best and additionally configured prediction blocks.
예를 들어 N개의 추가 예측 블록들을 이용하는 경우, IDV가 가리키는 위치에서 구성된 복원 블록(REC_BLK)에 대해 N+1개의 잔차 신호 블록들이 아래의 수학식 30을 이용하여 구성될 수 있다. For example, when using N additional prediction blocks, N + 1 residual signal blocks for a reconstructed block REC_BLK configured at a location indicated by IDV may be configured using Equation 30 below.

예를 들어, 도 59와 같이 2개의 추가 예측 블록들을 이용하는 경우, IDV가 가리키는 위치에서 구성된 복원 블록(REC_BLK)에 대해 3개의 잔차 신호 블록들이 아래의 수학식 31을 이용하여 구성될 수 있다. For example, when using two additional prediction blocks as shown in FIG. 59, three residual signal blocks may be configured using Equation 31 below for the reconstructed block REC_BLK configured at a location indicated by IDV.

각 IDV가 가리키는 위치의 검색 영역 내 복원 블록에 적용되는 예측 블록의 개수만큼, 2차 잔차 신호 블록(second order residual block)이 구성될 수 있다. Second order residual blocks may be configured by the number of prediction blocks applied to the reconstructed blocks in the search region at the location indicated by each IDV.
도 60은 2차 잔차 신호 블록을 이용한 잔차 신호의 예측을 설명하기 위한 도면이다.60 is a diagram for explaining prediction of a residual signal using a secondary residual signal block.
도 60과 같이, 2차 잔차 신호 블록(RES_BLK_SEC)은 RES_BLK_'MODE'와 RES_BLK_IDV_'MODE'의 차분을 통해 구할 수 있다. 이때, 'MODE'는 특정 화면 내 예측 모드일 수 있다. As illustrated in FIG. 60, the secondary residual signal block RES_BLK_SEC may be obtained through a difference between RES_BLK_'MODE 'and RES_BLK_IDV_'MODE'. In this case, 'MODE' may be a prediction mode within a specific screen.
예를 들어, 복원 블록에 대해 N개의 예측 블록이 적용되는 경우, 아래의 수학식 32를 이용하여 복원 블록(RES_BLK)에 대한 N개의 2차 잔차 신호 블록을 구성할 수 있다. For example, when N prediction blocks are applied to the reconstruction block, N secondary residual signal blocks for the reconstruction block RES_BLK may be configured using Equation 32 below.

예를 들어 도 60과 같이, predModeIntra를 이용해 생성한 예측 모드 및 2개의 추가 예측 블록을 이용하는 경우, 아래의 수학식 33을 이용하여 복원 블록(REC_BLK)에 대해 3개의 2차 잔차 신호 블록을 구성할 수 있다.For example, as shown in FIG. 60, when using the prediction mode generated using predModeIntra and two additional prediction blocks, three secondary residual signal blocks may be configured for the reconstructed block REC_BLK using Equation 33 below. Can be.
검색 영역 내 각 IDV가 가리키는 위치의 복원 블록에서, 2차 잔차 신호 블록(RES_BLK_SEC)들 중 율-왜곡 최적화(Rate-distortion optimization)에 따른 비용 함수 값이 최소가 되는 잔차 신호 블록과 RES_BLK_best에서의 비용 함수 값을 비교하여 잔차 신호 예측을 수행할지 여부를 결정할 수 있다. 잔차 신호 예측을 수행할지 여부는 예컨대, 지시자 SRP_flag(Second order Residual Prediction)를 사용하여 나타낼 수 있다. 예컨대, 잔차 신호 예측을 수행하는 경우 SRP_flag에 제 1값을 할당하고, 수행하지 않는 경우 제 2값을 할당할 수 있다. 이때, 제 1값은 1일 수 있고 제 2값은 0일 수 있다. In the reconstruction block at the location indicated by each IDV in the search region, the residual signal block and the cost at RES_BLK_best of which the cost function according to rate-distortion optimization among the second residual signal blocks RES_BLK_SEC is minimum The function values may be compared to determine whether to perform residual signal prediction. Whether to perform the residual signal prediction may be indicated by using, for example, an indicator SRP_flag (Second order Residual Prediction). For example, when performing residual signal prediction, a first value may be allocated to SRP_flag, and when not performing, a second value may be allocated. In this case, the first value may be 1 and the second value may be 0.
예를 들어, 2차 잔차 신호 블록들 중 최소 비용 함수 값이 RES_BLK_best에서 발생되는 비용 함수 값보다 작은 경우, SRP_flag에 제1 값이 할당될 수 있다. 또한, SRP_flag, IDV, 최소 비용 함수 값을 갖는 2차 잔차 신호 블록 생성을 위해 사용된 화면 내 예측 모드, RES_BLK_SEC의 2차 잔차 신호 중 적어도 하나 이상이 비트스트림에 또는 비트스트림으로부터 부호화 또는 복호화될 수 있다. For example, when the minimum cost function value of the secondary residual signal blocks is smaller than the cost function value generated in RES_BLK_best, the first value may be assigned to SRP_flag. In addition, at least one or more of the SRP_flag, IDV, and the intra prediction mode used for generating the secondary residual signal block having the minimum cost function value, and the secondary residual signal of the RES_BLK_SEC may be encoded or decoded in or from the bitstream. have.
예를 들어, 2차 잔차 신호 블록들 중 최소 비용 함수 값이 RES_BLK_best에서 발생되는 비용 함수 값보다 크거나 같은 경우, SRP_flag에 제2 값이 할당될 수 있다. 또한, SRP_flag, predModeIntra, RES_BLK_best의 잔차 신호 중 적어도 하나 이상이 비트스트림에 또는 비트스트림으로부터 부호화 또는 복호화될 수 있다. For example, when the minimum cost function value of the secondary residual signal blocks is greater than or equal to the cost function value generated in RES_BLK_best, a second value may be assigned to SRP_flag. In addition, at least one or more of the residual signals of SRP_flag, predModeIntra, and RES_BLK_best may be encoded or decoded in or from the bitstream.
검색 영역 내 모든 샘플을 가리키는 모든 IDV에 대해 상기 과정을 반복 수행하면서, RES_BLK_best의 비용 함수 값보다 작은 비용 함수를 갖는 2차 잔차 신호 블록을 가리키는 모든 IDV가 결정될 수 있다. 결정된 모든 IDV 중에서 최소의 비용 함수 값을 갖는 IDV가 최종 선택될 수 있다.While repeating the above process for all IDVs pointing to all samples in the search region, all IDVs pointing to the secondary residual signal block having a cost function less than the cost function value of RES_BLK_best can be determined. Of all the determined IDVs, the IDV with the lowest cost function value may be finally selected.
도 61은 잔차 신호 예측의 일 실시예를 설명하기 위한 도면이다. 61 is a diagram to describe an embodiment of a residual signal prediction.
CUR_BLK은 부호화/복호화되는 현재 블록을 나타낸다. RES_BLK는 제 1차 잔차 신호일 수 있으며 현재 블록에 대한 예측 블록과 CUR_BLK 사이의 잔차 신호 블록을 나타낸다. 상기 예측 블록은 현재 블록을 위해 부호화기/복호화기에서 구성된 다수의 예측 블록들 중 어느 하나일 수 있다. CUR_BLK represents the current block to be encoded / decoded. RES_BLK may be a primary residual signal and represents a residual signal block between the prediction block for the current block and CUR_BLK. The prediction block may be any one of a plurality of prediction blocks configured in an encoder / decoder for the current block.
IDV_REC_BLK는 IDV로부터 구성된 복원 블록을 나타낸다. RES_BLK_IDV는 현재 블록에 대한 예측 블록과 IDV_REC_BLK 사이의 잔차 신호 블록을 나타낸다. 상기 예측 블록은 현재 블록을 위해 부호화기/복호화기에서 구성된 다수의 예측 블록들 중 어느 하나일 수 있다. IDV_REC_BLK represents a recovery block constructed from IDV. RES_BLK_IDV represents a residual signal block between IDV_REC_BLK and the prediction block for the current block. The prediction block may be any one of a plurality of prediction blocks configured in an encoder / decoder for the current block.
RES_BLK_SEC는 RES_BLK와 RES_BLK_IDV사이의 2차 잔차 신호 블록을 나타낸다. RES_BLK_SEC represents a secondary residual signal block between RES_BLK and RES_BLK_IDV.
도 61에서, RES_BLK의 비용 함수 값보다 RES_BLK_SEC의 비용 함수 값이 작은 경우, SRP_flag에 제1값이 할당될 수 있다. 또한, SRP_flag, IDV, 최소 비용 함수 값을 갖는 2차 잔차 신호 블록 생성을 위해 사용된 화면 내 예측 모드, RES_BLK_SEC의 2차 잔차 신호 중 적어도 하나 이상이 비트스트림에 또는 비트스트림으로부터 부호화 또는 복호화될 수 있다. 상기 제 1값은 0 또는 1일 수 있다.In FIG. 61, when the cost function value of RES_BLK_SEC is smaller than the cost function value of RES_BLK, a first value may be assigned to SRP_flag. In addition, at least one or more of the SRP_flag, IDV, and the intra prediction mode used for generating the secondary residual signal block having the minimum cost function value, and the secondary residual signal of the RES_BLK_SEC may be encoded or decoded in or from the bitstream. have. The first value may be 0 or 1.
도 61에서, RES_BLK의 비용 함수 값보다 RES_BLK_SEC의 비용 함수 값이 크거나 같은 경우, SRP_flag에 제2값이 할당될 수 있다. 또한, SRP_flag, predModeIntra, RES_BLK의 1차 잔차 신호 중 적어도 하나 이상이 비트스트림에 또는 비트스트림으로부터 부호화 또는 복호화될 수 있다. 상기 제 2값은 0 또는 1일 수 있다.In FIG. 61, when the cost function value of RES_BLK_SEC is greater than or equal to the cost function value of RES_BLK, a second value may be allocated to SRP_flag. In addition, at least one or more of the primary residual signal of SRP_flag, predModeIntra, and RES_BLK may be encoded or decoded in or from the bitstream. The second value may be 0 or 1.
현재 블록의 잔차 신호는 제1 잔차 신호와 제2 잔차 신호 중 적어도 하나를 이용하여 유도될 수 있다. 주변 블록 IDV_REC_BLK은 전술한 IDV에 의해 지시된 블록일 수도 있고, 현재 블록에 인접한 블록(예를 들어, 좌측, 상단 등과 같이 현재 블록의 이전에 복원된 블록)일 수도 있다. IDV는 그대로 부호화될 수도 있고, 현재 픽쳐 내 다른 블록의 IDV와의 차분 코딩으로 부호화될 수도 있다. 상기 RES_BLK_IDV는 상기 복원된 주변 블록에서 소정의 예측 블록을 뺀 값으로 유도될 수 있다. 이때 상기 예측 블록 생성을 위한 인트라 예측 모드는 주변 블록 IDV_REC_BLK 혹은 현재 블록의 인트라 예측 모드일 수 있고, 부호화기/복호화기에 기-약속된 모드일 수도 있다. 또는, 소정의 예측 블록은 현재 블록에 대한 예측 블록과 동일한 것으로 설정될 수도 있다. 또는, 현재 블록을 포함한 상위 블록을 정의하고, 해당 상위 블록에 속한 블록들이 공유하는 잔차 신호를 제2 잔차 신호로 정의할 수도 있다. 전술한 제2 잔차 신호를 기반으로 하는 잔차 예측 기법은 소정의 플래그(SRP_flag)에 기반하여 선택적으로 수행될 수 있다. 상기 플래그는 시퀀스, 픽쳐, 슬라이스, 블록 단위 중 적어도 하나로부터 시그날링될 수 있다. 또는, 일정한 경우, 상기 플래그는 현재 블록의 크기, 형태 및/또는 깊이 등에 따라 부호화기/복호화기에 기-약속된 고정된 값으로 유도될 수도 있다. The residual signal of the current block may be derived using at least one of the first residual signal and the second residual signal. The neighboring block IDV_REC_BLK may be a block indicated by the above-described IDV, or may be a block adjacent to the current block (eg, a previously reconstructed block of the current block such as a left side, a top side, and the like). The IDV may be encoded as it is, or may be encoded by differential coding with IDV of another block in the current picture. The RES_BLK_IDV may be derived by subtracting a predetermined prediction block from the reconstructed neighboring block. In this case, the intra prediction mode for generating the prediction block may be a neighboring block IDV_REC_BLK or an intra prediction mode of the current block, or may be a mode pre-committed to an encoder / decoder. Alternatively, the predetermined prediction block may be set to be the same as the prediction block for the current block. Alternatively, an upper block including the current block may be defined, and a residual signal shared by blocks belonging to the upper block may be defined as a second residual signal. The residual prediction technique based on the second residual signal described above may be selectively performed based on a predetermined flag SRP_flag. The flag may be signaled from at least one of a sequence, a picture, a slice, and a block unit. Alternatively, in certain cases, the flag may be derived with a fixed value pre-committed to the encoder / decoder according to the size, shape and / or depth of the current block.
현재 블록에서 잔차 신호 예측의 수행 여부를 나타내는 지시자(플래그, flag)를 부/복호화할 수 있다. 예를 들어, 상기 지시자는 SRP_flag일 수 있으며 현재 블록 또는 서브 블록 중 적어도 하나의 단위마다 부/복호화될 수 있다.An indicator (flag, flag) indicating whether residual signal prediction is performed in the current block may be encoded / decoded. For example, the indicator may be SRP_flag and may be encoded / decoded for at least one unit of the current block or subblock.
잔차 신호 예측에 필요한 정보인, IDV, 현재 블록의 잔차 신호 예측에서 선택된 화면 내 예측 모드(도 61에서, mode_x) 및 기타 부호화 파라미터 정보 중 하나 이상은 비트스트림에 또는 비트스트림으로부터 부호화 또는 복호화될 수 있다.One or more of IDV, information required for the residual signal prediction, the intra prediction mode selected in the residual signal prediction of the current block (in FIG. 61, mode_x) and other encoding parameter information may be encoded or decoded in or from the bitstream. have.
현재 블록의 IDV 정보는 인접 블록의 IDV를 이용하여 예측 부/복호화할 수 있다. 예를 들어, 인접 블록들의 IDV의 최소값, 최대값, 중간값, 평균값, 최빈값 또는 가중치 합과 현재 블록의 IDV의 차분 값을 부/복호화 할 수 있다. The IDV information of the current block may be predicted / decoded using the IDV of the neighboring block. For example, the minimum, maximum, median, average, mode, or weighted sum of IDVs of adjacent blocks and the difference value of IDVs of the current block may be encoded / decoded.
또는 부호화기는, 인접 블록의 IDV 중 적어도 하나가 현재 블록의 IDV와 동일한 경우, 기정의된 방법에 따라 인접 블록의 IDV를 이용하여 IDV 리스트를 구성하여 이용할 수 있다. 부호화기는, 현재 블록의 IDV 정보로서, 인접 블록의 IDV 중 적어도 하나가 현재 블록의 IDV와 동일함을 지시하는 정보(예컨대, 플래그) 및/또는 상기 IDV 리스트 내에서 상기 동일한 IDV를 지시하는 정보(예컨대, 인덱스)를 부호화할 수 있다. 복호화기는, 상기 플래그 정보가 인접 블록의 IDV 중 적어도 하나가 현재 블록의 IDV와 동일함 지시하는 경우, 상기 기정의된 방법에 따라 IDV 리스트를 구성할 수 있다. 복호화기는 상기 구성된 IDV 리스트와 상기 인덱스 정보를 이용하여 현재 블록의 IDV를 유도할 수 있다.Alternatively, when at least one of the IDVs of the neighboring blocks is the same as the IDV of the current block, the encoder may construct an IDV list using the IDVs of the neighboring blocks according to a predefined method. The encoder is IDV information of the current block and includes information (eg, a flag) indicating that at least one of the IDVs of adjacent blocks is the same as the IDV of the current block and / or information indicating the same IDV in the IDV list For example, the index may be encoded. When the flag information indicates that at least one of the IDVs of the neighboring blocks is the same as the IDV of the current block, the decoder may construct an IDV list according to the predefined method. The decoder may derive the IDV of the current block by using the configured IDV list and the index information.
도 62는 부호화기에서 잔차 신호 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.62 is a diagram for explaining an embodiment of performing a residual signal prediction in an encoder.
현재 블록에 대해 화면 내 예측이 수행되어(S6201), 최적의 화면 내 예측 모드(predModeIntra)가 결정될 수 있다(S6202). 단계 S6202에서, 최적의 화면 내 예측 모드를 이용한 예측 블록(PRD_BLK_best)이 생성될 수 있다. predModeIntra를 이용하여 생성된 상기 예측 블록(PRD_BLK_best)과 현재 블록간의 잔차 블록(RES_BLK_bset)이 획득될 수 있다(S6203).Intra-prediction is performed on the current block in operation S6201, and an optimal intra-prediction mode predModeIntra may be determined in operation S6202. In operation S6202, a prediction block PRD_BLK_best using an optimal intra prediction mode may be generated. A residual block RES_BLK_bset between the prediction block PRD_BLK_best and the current block generated using predModeIntra may be obtained (S6203).
단계 S6202에서 결정된 predModeIntra에 기초하여 N개의 추가 화면 내 예측 모드들이 결정될 수 있다(S6204). 단계 S6205에서, predModeIntra 및 N개의 추가 화면 내 예측 모드를 포함하는 N+1개의 화면 내 예측 모드들로부터 N+1개의 예측 블록들(PRD_BLK_'mode')이 생성될 수 있다. 단계 S6206에서, 상기 현재 블록과 N+1개의 상기 예측 블록들(PRD_BLK_'mode')을 이용하여 N+1개의 잔차 블록들(RES_BLK_'mode')이 획득될 수 있다.N additional intra prediction modes may be determined based on the predModeIntra determined in operation S6202 (S6204). In step S6205, N + 1 prediction blocks PRD_BLK_'mode 'may be generated from N + 1 intra prediction modes including predModeIntra and N additional intra prediction modes. In step S6206, N + 1 residual blocks RES_BLK_'mode 'may be obtained using the current block and N + 1 prediction blocks PRD_BLK_'mode'.
단계 S6207에서, 검색 범위(search range) 내에서 픽셀 단위의 검색 또는 특정한 검색 방법을 이용하여 IDV를 이동시켜 결정할 수 있다. 결정된 IDV 위치에서 복원 블록(REC_BLK_IDV)을 획득할 수 있다(S6208). 단계 S6209에서, REC_BLK_IDV와 상기 N+1개의 예측 블록들(PRD_BLK_'mode')을 이용하여 N+1개의 IDV 잔차 블록들(RES_BLK_IDV_'mode')이 획득될 수 있다.In operation S6207, the IDV may be moved by using a pixel-by-pixel search or a specific search method within the search range. The recovery block REC_BLK_IDV may be obtained at the determined IDV position (S6208). In step S6209, N + 1 IDV residual blocks RES_BLK_IDV_'mode 'may be obtained using REC_BLK_IDV and the N + 1 prediction blocks PRD_BLK_'mode'.
단계 S6210에서, RES_BLK_'mode' 및 이에 대응하는 RES_BLK_IDV_'mode'를 이용하여 N+1개의 2차 잔차 블록들(RES_BLK_SEC_'mode')이 획득될 수 있다.In step S6210, N + 1 secondary residual blocks RES_BLK_SEC_'mode 'may be obtained using RES_BLK_'mode' and the corresponding RES_BLK_IDV_'mode '.
단계 S6211에서, RES_BLK_SEC_'mode'의 각각과 RES_BLK_best의 RD 코스트가 비교될 수 있다. 적어도 하나의 RES_BLK_SEC_'mode'의 RD 코스트가 RES_BLK_best의 RD 코스트보다 작은 경우(S6211에서, Yes), 단계 S6212로 이동할 수 있다. 그렇지 않은 경우(S6211에서, No), 단계 S6213으로 이동할 수 있다.In step S6211, each of the RES_BLK_SEC_'mode 'and the RD cost of the RES_BLK_best may be compared. When the RD cost of at least one RES_BLK_SEC_'mode 'is smaller than the RD cost of RES_BLK_best (YES in S6211), the process may move to step S6212. If not (No in S6211), the flow proceeds to step S6213.
단계 S6212에서, SRP_flag에는 제1값(예컨대, 1)이 할당되고, 최적의 비용은 상기 적어도 하나의 RES_BLK_SEC_'mode'의 RD 코스트로 결정될 수 있다.In step S6212, the SRP_flag is assigned a first value (eg, 1), and an optimal cost may be determined as an RD cost of the at least one RES_BLK_SEC_'mode '.
단계 S6213에서, 현재 IDV가 검색 범위 내의 마지막 IDV인지가 판단될 수 있다. 현재 IDV가 마지막 IDV가 아닌 경우(S6213에서, N0), 단계 S6207로 이동하여, 다음 IDV에 대한 상기 동작이 반복될 수 있다. 현재 IDV가 마지막 IDV인 경우(S6213에서, Yes), 단계 S6214로 이동할 수 있다.In step S6213, it may be determined whether the current IDV is the last IDV in the search range. If the current IDV is not the last IDV (NO in S6213), the flow advances to step S6207, where the operation for the next IDV can be repeated. If the current IDV is the last IDV (YES in S6213), the flow proceeds to step S6214.
단계 S6214에서, SRP_flag가 제1값(예컨대, 1)인지 판단될 수 있다. SRP_flag가 제1값인 경우(S6214에서, Yes), 단계 S6215로, SRP_flag가 제1값이 아닌 경우(S6214에서, No), 단계 S6216으로 이동할 수 있다.In operation S6214, it may be determined whether the SRP_flag is the first value (eg, 1). If SRP_flag is the first value (Yes in S6214), the process may proceed to step S6215, and if SRP_flag is not the first value (No in S6214), the process may proceed to step S6216.
단계 S6215에서, SRP_flag, IDV, 최소 비용 함수 값을 갖는 2차 잔차 신호 블록 생성을 위해 사용된 화면 내 예측 모드('mode' used in PRED_BLK_'mode'), RES_BLK_SEC_'mode'의 2차 잔차 신호 중 적어도 하나 이상이 부호화 대상으로 결정되어, 단계 S6217에서 부호화될 수 있다.In step S6215, of the secondary residual signals of the SRP_flag, IDV, and the second residual signal block of the in-prediction mode ('mode' used in PRED_BLK_'mode ') and RES_BLK_SEC_'mode' used for generating the secondary residual signal block having the minimum cost function value. At least one or more may be determined as an encoding target, and may be encoded in step S6217.
단계 S6216에서, SRP_flag, predModeIntra, RES_BLK의 1차 잔차 신호(예컨대, RES_BLK_best) 중 적어도 하나 이상이 부호화 대상으로 결정되어, 단계 S6217에서 부호화될 수 있다.In operation S6216, at least one or more of the primary residual signals (eg, RES_BLK_best) of SRP_flag, predModeIntra, and RES_BLK may be determined to be encoded, and may be encoded in operation S6217.
IDV가 시그널링 되지 않는 경우, 복호화기는 부호화기에서 수행되는 탐색 과정을 동일하게 수행하여 IDV를 유도할 수 있다.If the IDV is not signaled, the decoder can derive the IDV by performing the same search process performed by the encoder.
도 63은 복호화기에서 잔차 신호 예측을 수행하는 일 실시예를 설명하기 위한 도면이다.63 is a diagram for explaining an embodiment of performing residual signal prediction in a decoder.
단계 S6301에서, 비트스트림에 포함된 관련 정보들이 복호화될 수 있다.In operation S6301, related information included in the bitstream may be decoded.
SRP_flag가 제1값(예컨대, 1)이 아닌 경우(S6302에서 No), 단계 S6303에 수행될 수 있다.When SRP_flag is not the first value (eg, 1) (No in S6302), the process may be performed in step S6303.
단계 S6303에서, predModeIntra에 대응하는 예측 블록(PRD_BLK_best)이 생성될 수 있다. 또한, 잔차 블록(RES_BLK_best)이 복호화될 수 있다.In operation S6303, a prediction block PRD_BLK_best corresponding to predModeIntra may be generated. In addition, the residual block RES_BLK_best may be decoded.
단계 S6304에서, PRD_BLK_best와 RES_BLK_best를 이용하여, 복원 블록이 생성될 수 있다.In operation S6304, a reconstruction block may be generated using PRD_BLK_best and RES_BLK_best.
SRP_flag가 제1값(예컨대, 1)인 경우(S6302에서 Yes), 단계 S6305, S6306, S6307이 수행될 수 있다.If SRP_flag is the first value (eg, 1) (Yes in S6302), steps S6305, S6306, and S6307 may be performed.
단계 S6305에서, 2차 잔차 블록(RES_BLK_SEC_'mode')이 복호화될 수 있다.In operation S6305, the secondary residual block RES_BLK_SEC_'mode 'may be decoded.
단계 S6306에서, 복호화된 IDV에 대응하는 복원 블록(REC_BLK_IDV)이 생성될 수 있다.In operation S6306, a reconstruction block REC_BLK_IDV corresponding to the decoded IDV may be generated.
단계 S6307에서, 복호화된 'mode'에 대응하는 예측 블록(PRD_BLK_'mode')이 생성될 수 있다.In operation S6307, a prediction block PRD_BLK_'mode 'corresponding to the decoded' mode 'may be generated.
단계 S6308에서, 상기 생성된 REC_BLK_IDV와 PRD_BLK_'mode'를 이용하여 IDV 잔차 블록(RES_BLK_IDV_'mode')이 생성될 수 있다.In step S6308, an IDV residual block RES_BLK_IDV_'mode 'may be generated using the generated REC_BLK_IDV and PRD_BLK_'mode'.
단계 S6309에서, 상기 생성된 RES_BLK_SEC_'mode'와 RES_BLK_IDV_'mode'를 이용하여 잔차 블록(RES_BLK)이 생성될 수 있다.In operation S6309, the residual block RES_BLK may be generated using the generated RES_BLK_SEC_'mode 'and RES_BLK_IDV_'mode'.
단계 S6310에서, 상기 생성된 RES_BLK와 PRD_BLK_'mode'를 이용하여 복원 블록이 생성될 수 있다.In step S6310, a reconstruction block may be generated using the generated RES_BLK and PRD_BLK_'mode '.
전술한 바와 같이 IDV가 시그널링 되지 않는 경우, 복호화기는 부호화기에서 수행되는 탐색 과정을 동일하게 수행하여 IDV를 유도할 수 있다. As described above, when the IDV is not signaled, the decoder may perform the same search process performed by the encoder to derive the IDV.
휘도 및 색차신호 각각에 대하여 상기 화면 내 부/복호화 과정을 수행할 수 있다. 예를 들어, 상기 화면 내 부/복호화 과정에서 화면 내 예측 모드 유도, 블록 분할, 참조 샘플 구성, 화면 내 예측 수행 중 적어도 하나 이상의 방법이 휘도 신호 및 색차 신호에 대해서 다르게 적용될 수 있다.The internal / decoding process of the screen may be performed on each of luminance and chrominance signals. For example, at least one method of deriving intra prediction mode, block division, reference sample configuration, and performing intra prediction may be differently applied to the luminance signal and the chrominance signal in the intra / decoding process.
휘도 및 색차신호에 대한 상기 화면 내 부/복호화 과정을 동일하게 수행할 수 있다. 예를 들어, 휘도 신호에 대하여 적용한 상기 화면 내 부/복호화 과정에서 화면 내 예측 모드 유도, 블록 분할, 참조 샘플 구성, 화면 내 예측 수행 중 적어도 하나를 색차 신호에 동일하게 적용할 수 있다. The internal / decoding process for the luminance and color difference signals may be performed in the same manner. For example, at least one of deriving intra prediction mode, block division, reference sample configuration, and performing intra prediction may be equally applied to the color difference signal in the intra / decoding process applied to the luminance signal.
상기의 방법들은 부호화기 및 복호화기에서 같은 방법으로 수행할 수 있다. 예를 들어, 상기 화면 내 부/복호화 과정에서 화면 내 예측 모드 유도, 블록 분할, 참조 샘플 구성, 화면 내 예측 수행 중 적어도 하나 이상의 방법이 부호화기 및 복호화기에서 동일하게 적용될 수 있다. 또한, 상기 방법들 적용하는 순서는 부호화기와 복호화기에서 상이할 수 있다. 예를 들어, 상기 현재 블록에 대한 화면 내 부/복호화를 수행함에 있어 부호화기에서는 참조 샘플을 구성한 후, 하나 이상의 화면 내 예측을 수행하여 결정된 화면 내 예측 모드를 부호화할 수 있다.The above methods can be performed in the same way in the encoder and the decoder. For example, at least one or more methods of intra prediction mode derivation, block division, reference sample configuration, and intra prediction may be applied to the encoder and the decoder in the intra / decoding process. In addition, the order of applying the above methods may be different in the encoder and the decoder. For example, in performing the intra / decoding of the current block, the encoder configures a reference sample, and then encodes the intra prediction mode determined by performing one or more intra predictions.
본 발명의 상기 실시예들은 부호화 블록, 예측 블록, 블록, 유닛 중 적어도 하나 이상의 크기에 따라 적용될 수 있다. 여기서의 크기는 상기 실시예들이 적용되기 위해 최소 크기 및/또는 최대 크기로 정의될 수도 있고, 상기 실시예가 적용되는 고정 크기로 정의될 수도 있다. 또한, 상기 실시예들은 제1 크기에서는 제1의 실시예가 적용될 수 있고, 제2 크기에서는 제2의 실시예가 적용될 수 있다. 즉, 상시 실시예들은 크기에 따라 복합적으로 적용될 수 있다. 또한, 본 발명의 상기 실시예들은 최소 크기 이상 및 최대 크기 이하일 경우에만 적용될 수 있다. 즉, 상기 실시예들을 블록 크기가 일정한 범위 내에 포함될 경우에만 적용될 수 있다.The above embodiments of the present invention may be applied according to the size of at least one of a coding block, a prediction block, a block, and a unit. The size here may be defined as a minimum size and / or a maximum size for the above embodiments to be applied, or may be defined as a fixed size to which the above embodiments are applied. In addition, in the above embodiments, the first embodiment may be applied at the first size, and the second embodiment may be applied at the second size. That is, the embodiments may be applied in combination according to the size. In addition, the above embodiments of the present invention can be applied only when the minimum size or more and the maximum size or less. That is, the above embodiments can be applied only when the block size is included in a certain range.
예를 들어, 부호화/복호화 대상 블록의 크기가 8x8 이상일 경우에만 상기 실시예들이 적용될 수 있다. 예를 들어, 부호화/복호화 대상 블록의 크기가 16x16 이상일 경우에만 상기 실시예들이 적용될 수 있다. 예를 들어, 부호화/복호화 대상 블록의 크기가 32x32 이상일 경우에만 상기 실시예들이 적용될 수 있다. 예를 들어, 부호화/복호화 대상 블록의 크기가 64x64 이상일 경우에만 상기 실시예들이 적용될 수 있다. 예를 들어, 부호화/복호화 대상 블록의 크기가 128x128 이상일 경우에만 상기 실시예들이 적용될 수 있다. 예를 들어, 부호화/복호화 대상 블록의 크기가 4x4일 경우에만 상기 실시예들이 적용될 수 있다. 예를 들어, 부호화/복호화 대상 블록의 크기가 8x8 이하일 경우에만 상기 실시예들이 적용될 수 있다. 예를 들어, 부호화/복호화 대상 블록의 크기가 16x16 이하일 경우에만 상기 실시예들이 적용될 수 있다. 예를 들어, 부호화/복호화 대상 블록의 크기가 8x8 이상이고 16x16 이하일 경우에만 상기 실시예들이 적용될 수 있다. 예를 들어, 부호화/복호화 대상 블록의 크기가 16x16 이상이고 64x64 이하일 경우에만 상기 실시예들이 적용될 수 있다.For example, the above embodiments may be applied only when the size of an encoding / decoding target block is 8x8 or more. For example, the above embodiments may be applied only when the size of the encoding / decoding target block is 16x16 or more. For example, the above embodiments may be applied only when the size of the encoding / decoding target block is 32x32 or more. For example, the above embodiments may be applied only when the size of the encoding / decoding target block is 64x64 or more. For example, the above embodiments may be applied only when the size of the encoding / decoding target block is 128x128 or more. For example, the above embodiments may be applied only when the size of the encoding / decoding target block is 4x4. For example, the above embodiments may be applied only when the size of an encoding / decoding target block is 8x8 or less. For example, the above embodiments may be applied only when the size of an encoding / decoding target block is 16x16 or less. For example, the above embodiments may be applied only when the size of an encoding / decoding target block is 8x8 or more and 16x16 or less. For example, the above embodiments may be applied only when the size of the encoding / decoding target block is 16x16 or more and 64x64 or less.
본 발명의 상기 실시예들은 시간적 계층(temporal layer)에 따라 적용될 수 있다. 상기 실시예들이 적용 가능한 시간적 계층을 식별하기 위해 별도의 식별자(identifier)가 시그널링되고, 해당 식별자에 의해 특정된 시간적 계층에 대해서 상기 실시예들이 적용될 수 있다. 여기서의 식별자는 상기 실시예가 적용 가능한 최소 계층 및/또는 최대 계층으로 정의될 수도 있고, 상기 실시예가 적용되는 특정 계층을 지시하는 것으로 정의될 수도 있다.The above embodiments of the present invention can be applied according to a temporal layer. A separate identifier is signaled to identify the temporal layer to which the embodiments are applicable and the embodiments can be applied to the temporal layer specified by the identifier. The identifier here may be defined as a minimum layer and / or a maximum layer to which the embodiment is applicable, or may be defined as indicating a specific layer to which the embodiment is applied.
예를 들어, 현재 영상의 시간적 계층이 최하위 계층일 경우에만 상기 실시예들이 적용될 수 있다. 예를 들어, 현재 영상의 시간적 계층 식별자가 0인 경우에만 상기 실시예들이 적용될 수 있다. 예를 들어, 현재 영상의 시간적 계층 식별자가 1 이상인 경우에만 상기 실시예들이 적용될 수 있다. 예를 들어, 현재 영상의 시간적 계층이 최상위 계층일 경우에만 상기 실시예들이 적용될 수 있다.For example, the above embodiments may be applied only when the temporal layer of the current image is the lowest layer. For example, the above embodiments may be applied only when the temporal layer identifier of the current image is zero. For example, the above embodiments may be applied only when the temporal layer identifier of the current image is one or more. For example, the above embodiments may be applied only when the temporal layer of the current image is the highest layer.
본 발명의 상기 실시예와 같이 참조 영상 리스트 생성(reference picture list construction) 및 참조 영상 리스트 수정(reference picture list modification) 과정에 사용되는 참조 영상 세트(reference picture set)는 L0, L1, L2, L3 중 적어도 1개 이상의 참조 영상 리스트를 사용할 수 있다.The reference picture set used in the process of reference picture list construction and reference picture list modification as in the embodiment of the present invention is one of L0, L1, L2, and L3. At least one reference picture list may be used.
본 발명의 상기 실시예에 따라 디블록킹 필터(deblocking filter)에서 경계 강도(boundary strength) 산출 시 부호화/복호화 대상 블록의 움직임 벡터를 1개 이상 그리고 최대 N개까지 사용할 수 있다. 여기서 N은 1 이상의 양의 정수를 나타내며, 2, 3, 4 등이 될 수 있다.According to the embodiment of the present invention, when calculating the boundary strength in the deblocking filter, one or more motion vectors of the encoding / decoding target block may be used. Where N represents a positive integer of 1 or more, and may be 2, 3, 4, or the like.
움직임 벡터 예측 시 움직임 벡터가 16-화소(16-pel) 단위, 8-화소(8-pel) 단위, 4-화소(4-pel) 단위, 정수-화소(integer-pel) 단위, 1/2-화소(1/2-pel) 단위, 1/4-화소(1/4-pel) 단위, 1/8-화소(1/8-pel) 단위, 1/16-화소(1/16-pel) 단위, 1/32-화소(1/32-pel) 단위, 1/64-화소(1/64-pel) 단위 중 적어도 하나 이상을 가질 때도 본 발명의 상기 실시예들이 적용될 수 있다. 또한 움직임 벡터 예측 수행 시 움직임 벡터는 상기 화소 단위 별로 선택적으로 사용될 수 있다.When predicting motion vectors, the motion vectors are in 16-pel units, 8-pel units, 4-pixel units, integer-pel units, 1/2 -1 / 2-pel units, 1 / 4-pel units, 1 / 8-pixel units 1 / 8-pel, 1 / 16-pixel units The above embodiments of the present invention may also be applied when the device has at least one of 1), 1 / 32-pixel (1 / 32-pel) units, and 1 / 64-pixel (1 / 64-pel) units. In addition, when performing motion vector prediction, a motion vector may be selectively used for each pixel unit.
본 발명의 상기 실시예들이 적용되는 슬라이스 종류(slice type)이 정의되고, 해당 슬라이스 종류에 따라 본 발명의 상기 실시예들이 적용될 수 있다.A slice type to which the above embodiments of the present invention are applied is defined, and the above embodiments of the present invention may be applied according to the corresponding slice type.
예를 들어, 슬라이스 종류가 T(Tri-predictive)-slice인 경우, 적어도 3개 이상의 움직임 벡터를 이용하여 예측 블록을 생성하고, 적어도 3개 이상의 예측 블록들의 가중 합을 계산하여 부호화/복호화 대상 블록의 최종 예측 블록으로 사용할 수 있다. 예를 들어, 슬라이스 종류가 Q(Quad-predictive)-slice인 경우, 적어도 4개 이상의 움직임 벡터를 이용하여 예측 블록을 생성하고, 적어도 4개 이상의 예측 블록들의 가중 합을 계산하여 부호화/복호화 대상 블록의 최종 예측 블록으로 사용할 수 있다.For example, when the slice type is Tri-predictive (T) -slice, a prediction block is generated using at least three or more motion vectors, and a weighted sum of at least three or more prediction blocks is calculated to calculate a block to be encoded / decoded. It can be used as the final prediction block of. For example, when the slice type is a Q-quad-slice, a prediction block is generated using at least four or more motion vectors, and a weighted sum of at least four or more prediction blocks is calculated to calculate a block to be encoded / decoded. It can be used as the final prediction block of.
본 발명의 상기 실시예들은 움직임 벡터 예측을 이용한 화면 간 예측 및 움직임 보상 방법에 적용될 수 있을 뿐만 아니라, 스킵 모드, 머지 모드 등을 이용한 화면 간 예측 및 움직임 보상 방법에 적용될 수 있다.The above embodiments of the present invention can be applied not only to inter prediction and motion compensation methods using motion vector prediction, but also to inter prediction and motion compensation methods using skip mode and merge mode.
본 발명의 상기 실시예들이 적용되는 블록의 형태는 정방형(square) 형태 혹은 비정방형(non-square) 형태를 가질 수 있다.The shape of the block to which the embodiments of the present invention are applied may have a square shape or a non-square shape.
상술한 실시예들에서, 방법들은 일련의 단계 또는 유닛으로서 순서도를 기초로 설명되고 있으나, 본 발명은 단계들의 순서에 한정되는 것은 아니며, 어떤 단계는 상술한 바와 다른 단계와 다른 순서로 또는 동시에 발생할 수 있다. 또한, 당해 기술 분야에서 통상의 지식을 가진 자라면 순서도에 나타난 단계들이 배타적이지 않고, 다른 단계가 포함되거나, 순서도의 하나 또는 그 이상의 단계가 본 발명의 범위에 영향을 미치지 않고 삭제될 수 있음을 이해할 수 있을 것이다. In the above-described embodiments, the methods are described based on a flowchart as a series of steps or units, but the present invention is not limited to the order of steps, and certain steps may occur in a different order or simultaneously from other steps as described above. Can be. Also, one of ordinary skill in the art appreciates that the steps shown in the flowcharts are not exclusive, that other steps may be included, or that one or more steps in the flowcharts may be deleted without affecting the scope of the present invention. I can understand.
상술한 실시예는 다양한 양태의 예시들을 포함한다. 다양한 양태들을 나타내기 위한 모든 가능한 조합을 기술할 수는 없지만, 해당 기술 분야의 통상의 지식을 가진 자는 다른 조합이 가능함을 인식할 수 있을 것이다. 따라서, 본 발명은 이하의 특허청구범위 내에 속하는 모든 다른 교체, 수정 및 변경을 포함한다고 할 것이다.The above-described embodiments include examples of various aspects. While not all possible combinations may be described to represent the various aspects, one of ordinary skill in the art will recognize that other combinations are possible. Accordingly, the invention is intended to embrace all other replacements, modifications and variations that fall within the scope of the following claims.
이상 설명된 본 발명에 따른 실시예들은 다양한 컴퓨터 구성요소를 통하여 수행될 수 있는 프로그램 명령어의 형태로 구현되어 컴퓨터 판독 가능한 기록 매체에 기록될 수 있다. 상기 컴퓨터 판독 가능한 기록 매체는 프로그램 명령어, 데이터 파일, 데이터 구조 등을 단독으로 또는 조합하여 포함할 수 있다. 상기 컴퓨터 판독 가능한 기록 매체에 기록되는 프로그램 명령어는 본 발명을 위하여 특별히 설계되고 구성된 것들이거나 컴퓨터 소프트웨어 분야의 당업자에게 공지되어 사용 가능한 것일 수도 있다. 컴퓨터 판독 가능한 기록 매체의 예에는, 하드 디스크, 플로피 디스크 및 자기 테이프와 같은 자기 매체, CD-ROM, DVD와 같은 광기록 매체, 플롭티컬 디스크(floptical disk)와 같은 자기-광 매체(magneto-optical media), 및 ROM, RAM, 플래시 메모리 등과 같은 프로그램 명령어를 저장하고 수행하도록 특별히 구성된 하드웨어 장치가 포함된다. 프로그램 명령어의 예에는, 컴파일러에 의해 만들어지는 것과 같은 기계어 코드뿐만 아니라 인터프리터 등을 사용해서 컴퓨터에 의해서 실행될 수 있는 고급 언어 코드도 포함된다. 상기 하드웨어 장치는 본 발명에 따른 처리를 수행하기 위해 하나 이상의 소프트웨어 모듈로서 작동하도록 구성될 수 있으며, 그 역도 마찬가지이다.Embodiments according to the present invention described above may be implemented in the form of program instructions that may be executed by various computer components, and may be recorded in a computer-readable recording medium. The computer-readable recording medium may include program instructions, data files, data structures, etc. alone or in combination. Program instructions recorded on the computer-readable recording medium may be those specially designed and configured for the present invention, or may be known and available to those skilled in the computer software arts. Examples of computer-readable recording media include magnetic media such as hard disks, floppy disks and magnetic tape, optical recording media such as CD-ROMs, DVDs, and magneto-optical media such as floptical disks. media), and hardware devices specifically configured to store and execute program instructions, such as ROM, RAM, flash memory, and the like. Examples of program instructions include not only machine code generated by a compiler, but also high-level language code that can be executed by a computer using an interpreter or the like. The hardware device may be configured to operate as one or more software modules to perform the process according to the invention, and vice versa.
이상에서 본 발명이 구체적인 구성요소 등과 같은 특정 사항들과 한정된 실시예 및 도면에 의해 설명되었으나, 이는 본 발명의 보다 전반적인 이해를 돕기 위해서 제공된 것일 뿐, 본 발명이 상기 실시예들에 한정되는 것은 아니며, 본 발명이 속하는 기술분야에서 통상적인 지식을 가진 자라면 이러한 기재로부터 다양한 수정 및 변형을 꾀할 수 있다.Although the present invention has been described by specific embodiments such as specific components and the like, but the embodiments and the drawings are provided to assist in a more general understanding of the present invention, the present invention is not limited to the above embodiments. For those skilled in the art, various modifications and variations can be made from these descriptions.
따라서, 본 발명의 사상은 상기 설명된 실시예에 국한되어 정해져서는 아니 되며, 후술하는 특허청구범위뿐만 아니라 이 특허청구범위와 균등하게 또는 등가적으로 변형된 모든 것들은 본 발명의 사상의 범주에 속한다고 할 것이다.Accordingly, the spirit of the present invention should not be limited to the above-described embodiments, and all of the equivalents or equivalents of the claims, as well as the appended claims, fall within the scope of the spirit of the present invention. I will say.
본 발명은 영상을 부호화/복호화하는데 이용될 수 있다.The present invention can be used to encode / decode an image.
Claims (20)
- 현재 블록에 대해 화면 내 예측을 수행하는 영상 복호화 방법에 있어서,An image decoding method for performing intra prediction on a current block,상기 현재 블록의 잔차 블록을 예측하기 위한 잔차 신호 예측이 수행되는지 여부를 지시하는 제1정보를 복호화하는 단계; 및Decoding first information indicating whether a residual signal prediction for predicting a residual block of the current block is performed; And상기 제1정보가 제1값을 지시하는 경우, 상기 잔차 신호 예측을 수행하는 단계를 포함하는 영상 복호화 방법.And performing the residual signal prediction when the first information indicates a first value.
- 제1항에 있어서,The method of claim 1,상기 잔차 신호 예측은 기복호화된 복원 블록에 기초하여 수행되는 영상 복호화 방법.The residual signal prediction is performed based on a decoded reconstruction block.
- 제2항에 있어서,The method of claim 2,IDV(Inta Displacement Vector)를 복호화하는 단계를 더 포함하고,Decoding an IDV (Inta Displacement Vector),상기 기복호화된 복원 블록은 상기 복호화된 IDV에 의해 특정되는 영상 복호화 방법.And the decoded reconstruction block is specified by the decoded IDV.
- 제2항에 있어서,The method of claim 2,상기 잔차 신호 예측에 이용된 화면 내 예측 모드를 복호화하는 단계; 및Decoding the intra prediction mode used for the residual signal prediction; And상기 복호화된 화면 내 예측 모드에 기초하여, 상기 복원 블록의 예측 블록을 생성하는 단계를 더 포함하는 영상 복호화 방법.And generating a prediction block of the reconstructed block based on the decoded intra prediction mode.
- 제4항에 있어서,The method of claim 4, wherein상기 복원 블록 및 상기 복원 블록의 예측 블록에 기초하여, 상기 복원 블록의 잔차 블록을 생성하는 단계를 더 포함하고,Generating a residual block of the reconstruction block based on the reconstruction block and the prediction block of the reconstruction block,상기 복원 블록의 잔차 블록은 상기 현재 블록의 잔차 블록의 예측 블록인 영상 복호화 방법.The residual block of the reconstruction block is a prediction block of the residual block of the current block.
- 제5항에 있어서,The method of claim 5,상기 현재 블록의 2차 잔차 블록을 복호화하는 단계; 및Decoding a second order residual block of the current block; And상기 현재 블록의 잔차 블록의 예측 블록 및 상기 2차 잔차 블록에 기초하여, 상기 현재 블록의 잔차 블록을 생성하는 단계를 더 포함하는 영상 복호화 방법.Generating a residual block of the current block based on the prediction block of the residual block of the current block and the secondary residual block.
- 제3항에 있어서,The method of claim 3,상기 IDV에 관한 정보가 비트스트림에 포함되지 않은 경우,If the information about the IDV is not included in the bitstream,상기 IDV를 복호화하는 단계는,Decoding the IDV,소정의 검색 방법을 이용하여, 소정의 검색 범위 내에 포함된 복수의 IDV 중 하나를 선택함으로써 수행되는 영상 복호화 방법.An image decoding method performed by selecting one of a plurality of IDVs included in a predetermined search range by using a predetermined search method.
- 제7항에 있어서,The method of claim 7, wherein상기 소정의 검색 방법은 영상 부호화 방법에서 사용된 것과 동일한 검색 방법인 영상 복호화 방법.And the predetermined search method is the same search method used in the video encoding method.
- 현재 블록에 대해 화면 내 예측을 수행하는 화면 내 예측부를 포함하는 영상 복호화 장치에 있어서,An image decoding apparatus including an intra picture prediction unit that performs an intra picture prediction on a current block,상기 화면 내 예측부는, 상기 현재 블록의 잔차 블록을 예측하기 위한 잔차 신호 예측이 수행되는지 여부를 지시하는 제1정보를 복호화하고, 상기 제1정보가 제1값을 지시하는 경우, 상기 잔차 신호 예측을 수행하는 영상 복호화 장치.The intra prediction unit decodes first information indicating whether a residual signal prediction for predicting a residual block of the current block is performed, and predicting the residual signal when the first information indicates a first value. An image decoding apparatus for performing.
- 현재 블록에 대해 화면 내 예측을 수행하는 영상 부호화 방법에 있어서,In the image encoding method for performing intra prediction on a current block,상기 현재 블록의 잔차 블록을 예측하기 위한 잔차 신호 예측을 수행하는 단계; 및Performing residual signal prediction to predict a residual block of the current block; And상기 잔차 신호 예측이 수행되는지 여부를 지시하는 제1정보를 부호화하는 단계를 포함하는 영상 부호화 방법.And encoding first information indicating whether the residual signal prediction is performed.
- 제10항에 있어서,The method of claim 10,상기 잔차 신호 예측은 기복호화된 복원 블록에 기초하여 수행되는 영상 부호화 방법.The residual signal prediction is performed based on a decoded reconstruction block.
- 제11항에 있어서,The method of claim 11,상기 기복호화된 복원 블록을 특정하는 IDV(Inta Displacement Vector)를 부호화하는 단계를 더 포함하는 영상 부호화 방법.And encoding an IDV (Inta Displacement Vector) that specifies the decoded reconstruction block.
- 제11항에 있어서,The method of claim 11,상기 잔차 신호 예측에 이용되는 화면 내 예측 모드를 결정하는 단계;Determining an intra prediction mode used for the residual signal prediction;상기 결정된 화면 내 예측 모드에 기초하여, 상기 복원 블록의 예측 블록을 생성하는 단계; 및Generating a prediction block of the reconstruction block based on the determined intra prediction mode; And상기 결정된 화면 내 예측 모드를 부호화하는 단계를 더 포함하는 영상 부호화 방법.And encoding the determined intra prediction mode.
- 제13항에 있어서,The method of claim 13,상기 복원 블록 및 상기 복원 블록의 예측 블록에 기초하여, 상기 복원 블록의 잔차 블록을 생성하는 단계를 더 포함하고,Generating a residual block of the reconstruction block based on the reconstruction block and the prediction block of the reconstruction block,상기 복원 블록의 잔차 블록은 상기 현재 블록의 잔차 블록의 예측 블록인 영상 부호화 방법.The residual block of the reconstruction block is a prediction block of the residual block of the current block.
- 제14항에 있어서,The method of claim 14,상기 현재 블록의 잔차 블록의 예측 블록 및 상기 현재 블록의 잔차 블록에 기초하여, 상기 현재 블록의 2차 잔차 블록을 생성하는 단계; 및Generating a secondary residual block of the current block based on the prediction block of the residual block of the current block and the residual block of the current block; And상기 현재 블록의 2차 잔차 블록을 부호화하는 단계를 더 포함하는 영상 부호화 방법.And encoding the second residual block of the current block.
- 제12항에 있어서,The method of claim 12,상기 IDV는, 소정의 검색 방법을 이용하여, 소정의 검색 범위 내에 포함된 복수의 IDV 중 하나를 선택함으로써 결정되는 영상 부호화 방법.And the IDV is determined by selecting one of a plurality of IDVs included in a predetermined search range by using a predetermined search method.
- 제16항에 있어서,The method of claim 16,상기 검색 범위는 상기 현재 블록의 크기, 형태, 분할 깊이 및 화면 내 예측 모드 중 적어도 하나에 기초하여 결정되는 영상 부호화 방법.The search range is determined based on at least one of the size, shape, segmentation depth, and intra prediction mode of the current block.
- 제16항에 있어서,The method of claim 16,상기 소정의 검색 방법은,The predetermined search method is상기 현재 블록의 잔차 블록의 비용 함수 값과 상기 현재 블록의 2차 잔차 블록의 비용 함수 값을 비교하는 단계를 포함하는 영상 부호화 방법.And comparing the cost function value of the residual block of the current block with the cost function value of the secondary residual block of the current block.
- 현재 블록에 대해 화면 내 예측을 수행하는 화면 내 예측부를 포함하는 영상 부호화 장치에 있어서,An image encoding apparatus including an intra prediction unit for performing intra prediction on a current block,상기 화면 내 예측부는, 상기 현재 블록의 잔차 블록을 예측하기 위한 잔차 신호 예측을 수행하고, 상기 잔차 신호 예측이 수행되는지 여부를 지시하는 제1정보를 부호화하는 영상 부호화 장치.And the intra prediction unit is configured to perform residual signal prediction for predicting a residual block of the current block and to encode first information indicating whether the residual signal prediction is performed.
- 현재 블록에 대해 화면 내 예측을 수행하는 영상 부호화 방법에 의해 생성된 비트스트림을 저장한 기록 매체로서,A recording medium storing a bitstream generated by an image encoding method for performing intra prediction on a current block.상기 영상 부호화 방법은,The video encoding method,상기 현재 블록의 잔차 블록을 예측하기 위한 잔차 신호 예측을 수행하는 단계; 및Performing residual signal prediction to predict a residual block of the current block; And상기 잔차 신호 예측이 수행되는지 여부를 지시하는 제1정보를 부호화하는 단계를 포함하는 비트스트림을 저장한 기록 매체.And encoding first information indicating whether the residual signal prediction is performed.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202311313785.3A CN117201809A (en) | 2016-08-01 | 2017-07-31 | Image encoding/decoding method and apparatus, and recording medium storing bit stream |
| CN201780061056.XA CN109792515B (en) | 2016-08-01 | 2017-07-31 | Image encoding/decoding method and apparatus, and recording medium storing bit stream |
| CN202311310805.1A CN117201807A (en) | 2016-08-01 | 2017-07-31 | Image encoding/decoding method and apparatus, and recording medium storing bit stream |
| CN202311311003.2A CN117201808A (en) | 2016-08-01 | 2017-07-31 | Image encoding/decoding method and apparatus, and recording medium storing bit stream |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2016-0098094 | 2016-08-01 | ||
| KR20160098094 | 2016-08-01 | ||
| KR10-2017-0000206 | 2017-01-02 | ||
| KR20170000206 | 2017-01-02 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018026148A1 true WO2018026148A1 (en) | 2018-02-08 |
Family
ID=61073915
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/KR2017/008221 WO2018026148A1 (en) | 2016-08-01 | 2017-07-31 | Image encoding/decoding method and device, and recording medium storing bitstream |
Country Status (3)
| Country | Link |
|---|---|
| KR (1) | KR102435675B1 (en) |
| CN (4) | CN117201807A (en) |
| WO (1) | WO2018026148A1 (en) |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109561316A (en) * | 2018-10-26 | 2019-04-02 | 西安科锐盛创新科技有限公司 | A kind of VR three dimensional image processing method |
| CN110166777A (en) * | 2018-07-04 | 2019-08-23 | 腾讯科技(深圳)有限公司 | Coding method, device and video data encoding device |
| EP3562158A1 (en) * | 2018-04-27 | 2019-10-30 | InterDigital VC Holdings, Inc. | Method and apparatus for combined intra prediction modes |
| WO2020128492A1 (en) * | 2018-12-19 | 2020-06-25 | British Broadcasting Corporation | Bitstream decoding |
| CN112088533A (en) * | 2018-03-21 | 2020-12-15 | 韩国电子通信研究院 | Image encoding/decoding method and apparatus, and recording medium storing bit stream |
| CN113225561A (en) * | 2018-09-21 | 2021-08-06 | Oppo广东移动通信有限公司 | Video signal encoding/decoding method and apparatus for the same |
| CN113225563A (en) * | 2019-06-25 | 2021-08-06 | Oppo广东移动通信有限公司 | Mapping method, encoder, decoder, and computer storage medium |
| CN113261286A (en) * | 2018-12-28 | 2021-08-13 | 韩国电子通信研究院 | Method and apparatus for deriving intra prediction mode |
| WO2021162723A1 (en) * | 2020-02-13 | 2021-08-19 | Google Llc | Intra prediction for image and video compression |
| CN113330739A (en) * | 2019-01-16 | 2021-08-31 | 北京字节跳动网络技术有限公司 | Insertion order of motion candidates in LUT |
| CN113826395A (en) * | 2019-04-16 | 2021-12-21 | Lg电子株式会社 | Matrix-based intra-prediction transform in image coding |
| CN113853797A (en) * | 2019-04-16 | 2021-12-28 | Lg电子株式会社 | Image coding using transform indices |
| CN115514973A (en) * | 2018-09-05 | 2022-12-23 | Lg电子株式会社 | Apparatus for decoding/encoding video signal and transmitting data |
| WO2023081509A1 (en) * | 2021-11-08 | 2023-05-11 | Beijing Dajia Internet Information Technology Co., Ltd | Cross-component sample adaptive offset |
| US11831817B2 (en) | 2019-01-02 | 2023-11-28 | Guangdong Oppo Mobile Telecommunications Corp., Ltd. | Methods for intra prediction, encoder and decoder |
| US12034914B2 (en) | 2018-06-29 | 2024-07-09 | Beijing Bytedance Network Technology Co., Ltd | Checking order of motion candidates in lut |
| US12058364B2 (en) | 2018-06-29 | 2024-08-06 | Beijing Bytedance Network Technology Co., Ltd. | Concept of using one or multiple look up tables to store motion information of previously coded in order and use them to code following blocks |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102627821B1 (en) | 2019-06-04 | 2024-01-23 | 베이징 바이트댄스 네트워크 테크놀로지 컴퍼니, 리미티드 | Construction of motion candidate list using neighboring block information |
| CN114391258B (en) * | 2019-07-05 | 2023-07-18 | Lg电子株式会社 | Video or image coding based on luminance mapping |
| US12081775B2 (en) * | 2019-08-31 | 2024-09-03 | Lg Electronics Inc. | Video or image coding method and device therefor |
| WO2021057996A1 (en) | 2019-09-28 | 2021-04-01 | Beijing Bytedance Network Technology Co., Ltd. | Geometric partitioning mode in video coding |
| CN114762342B (en) * | 2019-10-08 | 2024-02-13 | Lg电子株式会社 | Image coding method and device based on transformation |
| CN113422966B (en) * | 2021-05-27 | 2024-05-24 | 绍兴市北大信息技术科创中心 | Multi-model CNN loop filtering method |
| WO2024043745A1 (en) * | 2022-08-25 | 2024-02-29 | 엘지전자 주식회사 | Intra prediction mode-based image encoding/decoding method and apparatus using multi reference line (mrl), and recording medium for storing bitstream |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120275717A1 (en) * | 2009-12-15 | 2012-11-01 | JVC Kenwood Corporation | Image encoding device, image decoding device, image encoding method, and image decoding method |
| KR20150034213A (en) * | 2012-07-03 | 2015-04-02 | 삼성전자주식회사 | Method of multi-view video sequence coding/decoding based on adaptive local correction of illumination of reference frames without transmission of additional parameters (variants) |
| KR20150139554A (en) * | 2013-04-05 | 2015-12-11 | 퀄컴 인코포레이티드 | Generalized residual prediction in high-level syntax only shvc and signaling and management thereof |
| KR20160048170A (en) * | 2013-08-27 | 2016-05-03 | 퀄컴 인코포레이티드 | Residual prediction for intra block copying |
| US20160198158A1 (en) * | 2015-01-05 | 2016-07-07 | Citrix Systems, Inc. | Efficient video block matching |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107257466B (en) * | 2011-06-17 | 2020-06-26 | 寰发股份有限公司 | Method and apparatus for intra prediction mode coding |
| WO2012173315A1 (en) * | 2011-06-17 | 2012-12-20 | 엘지전자 주식회사 | Method and apparatus for encoding/decoding video in intra prediction mode |
| KR101348544B1 (en) * | 2011-08-17 | 2014-01-10 | 주식회사 케이티 | Methods of intra prediction on sdip and apparatuses for using the same |
| DK2773118T3 (en) * | 2011-10-24 | 2020-12-07 | Innotive Ltd | METHOD AND DEPARTMENT FOR IMAGE DECODING |
| JP2015008341A (en) * | 2011-10-31 | 2015-01-15 | 三菱電機株式会社 | Moving image encoding device, moving image decoding device, moving image encoding method, and moving image decoding method |
| KR20130049526A (en) * | 2011-11-04 | 2013-05-14 | 오수미 | Method for generating reconstructed block |
| KR101830352B1 (en) * | 2011-11-09 | 2018-02-21 | 에스케이 텔레콤주식회사 | Method and Apparatus Video Encoding and Decoding using Skip Mode |
| CN108235008A (en) * | 2011-12-05 | 2018-06-29 | Lg 电子株式会社 | The method and apparatus of intra prediction |
| KR101827939B1 (en) * | 2011-12-13 | 2018-02-12 | 주식회사 스카이미디어테크 | Method of adaptive intra prediction mode encoding and apparatus for the same, and method of decoding and apparatus for the same |
| JP2013141187A (en) * | 2012-01-06 | 2013-07-18 | Sony Corp | Image processing apparatus and image processing method |
| JP2013150164A (en) * | 2012-01-19 | 2013-08-01 | Sony Corp | Encoding apparatus and encoding method, and decoding apparatus and decoding method |
| CN109413423B (en) * | 2012-01-20 | 2022-11-01 | 杜比实验室特许公司 | Decoding method, video decoding apparatus, and encoding method |
| KR101725818B1 (en) * | 2012-06-29 | 2017-04-11 | 한국전자통신연구원 | Method and apparatus for image encoding/decoding |
| GB2509901A (en) * | 2013-01-04 | 2014-07-23 | Canon Kk | Image coding methods based on suitability of base layer (BL) prediction data, and most probable prediction modes (MPMs) |
| US9247255B2 (en) * | 2013-02-28 | 2016-01-26 | Research & Business Foundation Sungkyunkwan University | Method and apparatus for image encoding/decoding |
-
2017
- 2017-07-31 CN CN202311310805.1A patent/CN117201807A/en active Pending
- 2017-07-31 CN CN201780061056.XA patent/CN109792515B/en active Active
- 2017-07-31 CN CN202311313785.3A patent/CN117201809A/en active Pending
- 2017-07-31 WO PCT/KR2017/008221 patent/WO2018026148A1/en active Application Filing
- 2017-07-31 CN CN202311311003.2A patent/CN117201808A/en active Pending
- 2017-08-01 KR KR1020170097602A patent/KR102435675B1/en active IP Right Grant
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120275717A1 (en) * | 2009-12-15 | 2012-11-01 | JVC Kenwood Corporation | Image encoding device, image decoding device, image encoding method, and image decoding method |
| KR20150034213A (en) * | 2012-07-03 | 2015-04-02 | 삼성전자주식회사 | Method of multi-view video sequence coding/decoding based on adaptive local correction of illumination of reference frames without transmission of additional parameters (variants) |
| KR20150139554A (en) * | 2013-04-05 | 2015-12-11 | 퀄컴 인코포레이티드 | Generalized residual prediction in high-level syntax only shvc and signaling and management thereof |
| KR20160048170A (en) * | 2013-08-27 | 2016-05-03 | 퀄컴 인코포레이티드 | Residual prediction for intra block copying |
| US20160198158A1 (en) * | 2015-01-05 | 2016-07-07 | Citrix Systems, Inc. | Efficient video block matching |
Cited By (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112088533A (en) * | 2018-03-21 | 2020-12-15 | 韩国电子通信研究院 | Image encoding/decoding method and apparatus, and recording medium storing bit stream |
| EP3562158A1 (en) * | 2018-04-27 | 2019-10-30 | InterDigital VC Holdings, Inc. | Method and apparatus for combined intra prediction modes |
| WO2019209477A1 (en) * | 2018-04-27 | 2019-10-31 | Interdigital Vc Holdings, Inc. | Method and apparatus for combined intra prediction modes |
| CN112005552A (en) * | 2018-04-27 | 2020-11-27 | 交互数字Vc控股公司 | Method and apparatus for combined intra prediction modes |
| US11477436B2 (en) | 2018-04-27 | 2022-10-18 | Interdigital Vc Holdings, Inc. | Method and apparatus for combined intra prediction modes |
| US12034914B2 (en) | 2018-06-29 | 2024-07-09 | Beijing Bytedance Network Technology Co., Ltd | Checking order of motion candidates in lut |
| US12058364B2 (en) | 2018-06-29 | 2024-08-06 | Beijing Bytedance Network Technology Co., Ltd. | Concept of using one or multiple look up tables to store motion information of previously coded in order and use them to code following blocks |
| CN110166777A (en) * | 2018-07-04 | 2019-08-23 | 腾讯科技(深圳)有限公司 | Coding method, device and video data encoding device |
| CN110166777B (en) * | 2018-07-04 | 2023-11-17 | 腾讯科技(深圳)有限公司 | Encoding method, apparatus and video data encoding device |
| CN115514974A (en) * | 2018-09-05 | 2022-12-23 | Lg电子株式会社 | Method and medium for decoding/encoding video signal and transmitting data |
| CN115514973A (en) * | 2018-09-05 | 2022-12-23 | Lg电子株式会社 | Apparatus for decoding/encoding video signal and transmitting data |
| CN115514973B (en) * | 2018-09-05 | 2024-05-31 | Lg电子株式会社 | Apparatus for decoding/encoding video signal and transmitting data |
| CN113225561A (en) * | 2018-09-21 | 2021-08-06 | Oppo广东移动通信有限公司 | Video signal encoding/decoding method and apparatus for the same |
| CN113225561B (en) * | 2018-09-21 | 2023-04-21 | Oppo广东移动通信有限公司 | Video signal encoding/decoding method and apparatus therefor |
| CN109561316A (en) * | 2018-10-26 | 2019-04-02 | 西安科锐盛创新科技有限公司 | A kind of VR three dimensional image processing method |
| CN113196778B (en) * | 2018-12-19 | 2024-08-27 | 英国广播公司 | Bit stream decoding |
| US11616950B2 (en) | 2018-12-19 | 2023-03-28 | British Broadcasting Corporation | Bitstream decoder |
| CN113196778A (en) * | 2018-12-19 | 2021-07-30 | 英国广播公司 | Bit stream decoding |
| WO2020128492A1 (en) * | 2018-12-19 | 2020-06-25 | British Broadcasting Corporation | Bitstream decoding |
| CN113261286A (en) * | 2018-12-28 | 2021-08-13 | 韩国电子通信研究院 | Method and apparatus for deriving intra prediction mode |
| US11979555B2 (en) | 2018-12-28 | 2024-05-07 | Electronics And Telecommunications Research Institute | Method and apparatus for deriving intra-prediction mode |
| US11831817B2 (en) | 2019-01-02 | 2023-11-28 | Guangdong Oppo Mobile Telecommunications Corp., Ltd. | Methods for intra prediction, encoder and decoder |
| US11882293B2 (en) | 2019-01-02 | 2024-01-23 | Guangdong Oppo Mobile Telecommunications Corp., Ltd. | Methods for intra prediction, encoder and decoder |
| EP3896975B1 (en) * | 2019-01-02 | 2024-02-28 | Guangdong Oppo Mobile Telecommunications Corp., Ltd. | Method and device for intraframe prediction, video coding device, and storage medium |
| US11831882B2 (en) | 2019-01-02 | 2023-11-28 | Guangdong Oppo Mobile Telecommunications Corp., Ltd. | Methods for intra prediction, encoder and decoder |
| US11956464B2 (en) | 2019-01-16 | 2024-04-09 | Beijing Bytedance Network Technology Co., Ltd | Inserting order of motion candidates in LUT |
| CN113330739A (en) * | 2019-01-16 | 2021-08-31 | 北京字节跳动网络技术有限公司 | Insertion order of motion candidates in LUT |
| US11962799B2 (en) | 2019-01-16 | 2024-04-16 | Beijing Bytedance Network Technology Co., Ltd | Motion candidates derivation |
| US11831918B2 (en) | 2019-04-16 | 2023-11-28 | Lg Electronics Inc. | Image coding using transform index |
| US11831912B2 (en) | 2019-04-16 | 2023-11-28 | Lg Electronics Inc. | Transform for matrix-based intra-prediction in image coding |
| CN113853797A (en) * | 2019-04-16 | 2021-12-28 | Lg电子株式会社 | Image coding using transform indices |
| CN113826395B (en) * | 2019-04-16 | 2023-06-30 | Lg电子株式会社 | Matrix-based intra-prediction transform in image coding |
| CN113826395A (en) * | 2019-04-16 | 2021-12-21 | Lg电子株式会社 | Matrix-based intra-prediction transform in image coding |
| CN113853797B (en) * | 2019-04-16 | 2024-03-22 | Lg电子株式会社 | Image coding using transform indexes |
| US11902538B2 (en) | 2019-06-25 | 2024-02-13 | Guangdong Oppo Mobile Telecommunications Corp., Ltd. | Mapping method, encoder, decoder and computer storage medium |
| CN113225563B (en) * | 2019-06-25 | 2023-07-18 | Oppo广东移动通信有限公司 | Mapping method, encoder, decoder, and computer storage medium |
| US11546608B2 (en) | 2019-06-25 | 2023-01-03 | Guangdong Oppo Mobile Telecommunications Corp., Ltd. | Mapping method, encoder, decoder and computer storage medium |
| CN113225563A (en) * | 2019-06-25 | 2021-08-06 | Oppo广东移动通信有限公司 | Mapping method, encoder, decoder, and computer storage medium |
| WO2021162723A1 (en) * | 2020-02-13 | 2021-08-19 | Google Llc | Intra prediction for image and video compression |
| US12075089B2 (en) | 2020-02-13 | 2024-08-27 | Google Llc | Intra prediction for image and video compression |
| US12120345B2 (en) | 2020-02-13 | 2024-10-15 | Google Llc | Intra prediction for image and video compression |
| WO2023081509A1 (en) * | 2021-11-08 | 2023-05-11 | Beijing Dajia Internet Information Technology Co., Ltd | Cross-component sample adaptive offset |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102435675B1 (en) | 2022-08-24 |
| CN109792515A (en) | 2019-05-21 |
| CN109792515B (en) | 2023-10-24 |
| CN117201807A (en) | 2023-12-08 |
| KR20180014674A (en) | 2018-02-09 |
| CN117201808A (en) | 2023-12-08 |
| CN117201809A (en) | 2023-12-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018026148A1 (en) | Image encoding/decoding method and device, and recording medium storing bitstream | |
| WO2018016823A1 (en) | Image encoding/decoding method and device, and recording medium in which bitstream is stored | |
| WO2017222237A1 (en) | Intra prediction method and device | |
| WO2019177354A1 (en) | Method and device for encoding/decoding image and recording medium having bitstream stored thereon | |
| WO2019112394A1 (en) | Method and apparatus for encoding and decoding using selective information sharing between channels | |
| WO2018199675A1 (en) | Image encoding/decoding method and device, and recording medium storing bit stream | |
| WO2017222334A1 (en) | Method and apparatus for transform-based image encoding/decoding | |
| WO2018226015A1 (en) | Video encoding/decoding method and device, and recording medium storing bit stream | |
| WO2018012886A1 (en) | Image encoding/decoding method and recording medium therefor | |
| WO2018026166A1 (en) | Image encoding/decoding method and apparatus, and recording medium storing bitstream | |
| WO2018030773A1 (en) | Method and apparatus for image encoding/decoding | |
| WO2018012830A1 (en) | Image encoding/decoding method and device | |
| WO2018097607A1 (en) | Image encoding/decoding image method and device, and recording medium storing bit stream | |
| WO2020005035A1 (en) | Image encoding/decoding method and apparatus for throughput enhancement, and recording medium storing bitstream | |
| WO2019078629A1 (en) | Image encoding/decoding method and device, and recording medium having bitstream stored therein | |
| WO2019107927A1 (en) | Bidirectional intra prediction method and apparatus | |
| WO2021101345A1 (en) | Adaptive in-loop filtering method and device | |
| WO2021015581A1 (en) | Method, apparatus, and recording medium for encoding/decoding image by using geometric partitioning | |
| WO2020060242A1 (en) | Intra prediction mode encoding/decoding method and device, and recording medium in which bitstream is stored | |
| WO2018101685A1 (en) | Method and apparatus for encoding/decoding image, and recording medium storing bitstream | |
| WO2020050600A1 (en) | Video encoding/decoding method and device, and recording medium for storing bitstream | |
| WO2020017873A1 (en) | Image encoding/decoding method and apparatus, and recording medium in which bitstream is stored | |
| WO2018174618A1 (en) | Prediction method and device using reference block | |
| WO2021112652A1 (en) | Method, apparatus, and recording medium for region-based differential image encoding/decoding | |
| WO2021112651A1 (en) | Method and device for encoding/decoding image by using palette mode, and recording medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17837199 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17837199 Country of ref document: EP Kind code of ref document: A1 |