USRE45489E1 - Automated high-throughput seed sample handling system and method - Google Patents
Automated high-throughput seed sample handling system and method Download PDFInfo
- Publication number
- USRE45489E1 USRE45489E1 US13/733,544 US201313733544A USRE45489E US RE45489 E1 USRE45489 E1 US RE45489E1 US 201313733544 A US201313733544 A US 201313733544A US RE45489 E USRE45489 E US RE45489E
- Authority
- US
- United States
- Prior art keywords
- seed
- sample
- accumulated
- destructively
- deriving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime, expires
Links
Images












































































Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01C—PLANTING; SOWING; FERTILISING
- A01C1/00—Apparatus, or methods of use thereof, for testing or treating seed, roots, or the like, prior to sowing or planting
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01C—PLANTING; SOWING; FERTILISING
- A01C1/00—Apparatus, or methods of use thereof, for testing or treating seed, roots, or the like, prior to sowing or planting
- A01C1/02—Germinating apparatus; Determining germination capacity of seeds or the like
- A01C1/025—Testing seeds for determining their viability or germination capacity
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C2501/00—Sorting according to a characteristic or feature of the articles or material to be sorted
- B07C2501/009—Sorting of fruit
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S209/00—Classifying, separating, and assorting solids
- Y10S209/938—Illuminating means facilitating visual inspection
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S209/00—Classifying, separating, and assorting solids
- Y10S209/939—Video scanning
Definitions
- the present invention relates to handling seed, and in particular, to automatic processing of previously harvested seed samples used in plant breeding programs and applications.
- corn breeding is an arduous science.
- the harvesting, handling, and ultimate processing of corn seed samples into packages is an exacting and labor intensive process.
- One important part is the harvesting and handling of breeding seeds. Not only is it crucial to keep track of such things as particular characteristics of the seeds (e.g. genotype, inbred identification, where they were grown); each seed and each seed sample must be carefully handled and evaluated, so that there is a high probability the selected seeds will germinate and so that there is no contamination of the set of seeds comprising the sample of seeds. Only those that meet certain criteria (e.g. undamaged, not diseased, correct characteristics) are used for further breeding activities.
- certain criteria e.g. undamaged, not diseased, correct characteristics
- breeding, product development, and product characterization/commercialization processes require the production, evaluation, and use of many samples of corn (Zea Mays). Each sample consists of from one to many ears of corn.
- corn plants are grown to maturity in nurseries, and then conditioned and processed in the following separate steps: artificially dried in seed dryers, shelled, the seed cleaned and sized, and then packaged either for replanting or shipment to other locations for yield testing or evaluation for additional breeding crosses.
- This process must be conducted so that there is no intermingling or cross-contamination of seed samples, and must include a step for removing such things as inert matter, excessively small or large seed, and damaged or diseased seed.
- This process, from shelling through packaging is currently substantially manual in nature, and processes samples at the rate of 15-20 samples/person-hour. Each of the steps is usually conducted separately, with non-integrated devices or machinery.
- seed samples are conventionally processed as follows. Corn ears are harvested in the field and then placed in plastic mesh bags having some identifying tag. These bags are then dried in dryer bins. When dry, they are manually unloaded and run through a sheller. The shelled seed is then cleaned using any of a number of different methods ranging from cylindrical screens made out of hardware cloth, to flat oscillating screens, or plastic buckets with screen bottoms.
- a seed or seed sample handling process and system includes automated handling of previously harvested seeds, by assigning or validating an identifier to a set of seeds, automatically performing one or more operations on the set of seed, and accumulating an end product and storing information about the end product correlated to the identifier.
- the end product can be selected seeds of the set of seeds meeting certain pre-defined criteria.
- a possible feature of the invention includes validating the identity of a harvested seed sample, tracking the sample through a seed conditioning process, and ensuring its purity and identity as it is packaged.
- a still further possible feature of the invention includes deriving information about the seed sample during the conditioning process which can be correlated to the sample.
- a discrimination device or method can be used to analyze the seeds and discriminate between them or derive a characteristic of the seed, such as moisture.
- the deriving information can be added to a pre-existing knowledge base about the seed from which the sample is taken and conditioned.
- the apparatus, system and method can be substantially automated and can condition one batch at a time from start to finish, or condition multiple batches serially. Still further automated functions can be added.
- the conditioning system and the derived information can be used in a substantially automated system of conditioning seed samples and administrating an inventory of a plurality of seed samples; validating requests for certain seed samples, confirming and maintaining purity and identification of requested samples, and packaging and preparing requested samples for shipment to designated recipients.
- FIG. 1 is a diagrammatic view of a system according to a preferred embodiment of the invention.
- FIGS. 2A-C is a flow chart of a method according to a preferred embodiment of the invention.
- FIG. 3A is a process and information flow diagram according to an embodiment of the present invention.
- FIG. 3B is diagram illustrating the interaction of data according to an embodiment of the present invention.
- FIG. 4 is a diagram showing database tables of the local database according to an embodiment of the present invention.
- FIGS. 5A and B is a diagram illustrating the parallel relationship between seed processing and information processing according to an embodiment of the present invention.
- FIG. 6 is a perspective view of an embodiment of the system of FIG. 1 .
- FIG. 7A is a top plan view of FIG. 6 .
- FIG. 7B is a right side plan view of FIG. 7A .
- FIG. 7C is front plan view of FIG. 7A .
- FIG. 7D is a left side plan view of FIG. 7A .
- FIG. 8 is perspective view of an embodiment of a control enclosure cabinet of FIG. 4 and certain internal components.
- FIG. 9 in its subparts A-C, is an electrical schematic of AC power distribution for the control circuitry of FIG. 8 .
- FIG. 10 in its subparts A-C, is an electrical schematic of DC power distribution for the control circuitry of FIG. 8 .
- FIG. 11 in its subparts A-C, is an electrical schematic of input wiring for the control circuitry of FIG. 8 .
- FIG. 12 in its subparts A-E, is an electrical schematic of output wiring for the control circuitry of FIG. 8 .
- FIG. 13 in its subparts A-C, is an electrical schematic of a seed counting subsystem for the control circuitry of FIG. 8 .
- FIG. 14 is a diagrammatic view of pneumatic power source for use with the control circuitry of FIG. 8 .
- FIG. 15 is a diagrammatic view of product line vac lines in the system of FIG. 6 .
- FIG. 16 is a diagrammatic view of product line vacuum control lines for the pneumatic lines of FIG. 15 .
- FIG. 17 is a diagrammatic view of the pneumatic cylinder control lines for pneumatic cylinders for the system of FIG. 3 .
- FIG. 18 is a block diagram showing the relationship between various user interface screens of one embodiment of the present invention.
- FIG. 19A is a graphic user interface (GUI) presented to an operator of a system according to FIG. 1 permitting a user to select particular types of seed or products.
- GUI graphic user interface
- FIG. 19B is a GUI showing the system settings.
- FIG. 19C is a GUI of system settings for a particular type of seed or product showing the accompanying processing times.
- FIG. 20 is a GUI of set up screen to initialize the system for a certain type of seed or product.
- FIG. 21 is a GUI for hardware set up for the system.
- FIG. 22 is a GUI for a run screen for the system.
- FIG. 23A is a GUI for a bar code format and label set up for the system.
- FIG. 23B is a GUI for label format for a box which will hold one or more samples processed by the system.
- FIG. 24 is a GUI illustrating content of one or more boxes.
- FIG. 25A is an example of a printed label for a set of “clean” or selected seeds from the processing of the system.
- FIG. 25B is an example of a printed label for a set of “dirty” or non-selected seeds from the processing of the system.
- FIG. 25C is an example of a label for a box adapted to hold one or more of the clean or dirty sets of seeds processed by the system.
- FIG. 26 is a perspective view of a seed cleaner station according to the system of FIG. 3 .
- FIG. 27 is a front elevation of FIG. 26 .
- FIG. 28A is an enlarged isolated side elevation of a collection funnel and actuatable slide gate of FIG. 26 .
- FIG. 28B is a still further enlarged perspective view of a slide gate for the collection funnel of FIG. 28A .
- FIG. 28C is a sectional view taken along lines 28 C- 28 C of FIG. 28B .
- FIG. 29 is a perspective view of a self-cleaning seed cleaner with first (scalping) and second (sieving) sizing screens.
- FIG. 30A is a side elevation view of the embodiment of self-cleaning seed cleaner of FIG. 29 .
- FIG. 30B is similar to FIG. 30A but shows a screen cleaning function for the embodiment of FIG. 29 .
- FIGS. 31 and 32 are diagrammatic views illustrating the principal of operation of the embodiment of FIGS. 30A and 30B .
- FIG. 33 is a side elevation view of FIG. 29 showing the seed cleaners in a normal operating position.
- FIG. 34 is identical to FIG. 33 but showing the seed cleaners in the self-cleaning position.
- FIG. 35 is an isolated perspective view of the actuators and linkage that operate self-cleaning functions of the cleaner of FIGS. 33 and 34 .
- FIG. 36 is an alternative embodiment to FIG. 34 .
- FIG. 37A is a perspective view of an embodiment of a seed cleaner station.
- FIG. 37B is an enlarged isolated perspective view of the cleaner feeder for the station of FIG. 37A .
- FIG. 37C is an enlarged isolated perspective view of a seed counter attached to the outlet of the seed cleaner of FIG. 37A .
- FIG. 38 is a diagrammatic perspective view illustrating the functions of a color sorter.
- FIG. 39 is an enlarged isolated perspective view of a sorter bucket from the outlet end of the sorter of FIG. 37A .
- FIG. 40 is a side elevation view of the sorter feeder and sorter seed chute of FIG. 37A .
- FIG. 41 is a side elevation of the color sorter station of FIG. 37A .
- FIG. 42 is an enlarged perspective view of a swap valve and sorter funnel of FIG. 41 .
- FIG. 43 is an enlarged elevation taken at line 43 - 43 of FIG. 41 .
- FIG. 44 is an isolated top plan view of a slide gate of the swap valve of FIG. 42 .
- FIG. 45 is an isolated elevation view of the slide gate of FIG. 44 .
- FIG. 46 is a perspective view of an embodiment of a bagging station of the system of FIG. 37A .
- FIG. 47 is a front elevation of FIG. 46 .
- FIG. 48 is a side elevation of FIG. 46 .
- FIG. 49 is an enlarged perspective view of the working components of the bagging station of FIG. 46 .
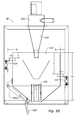
- FIG. 50 is a still further enlarged front elevation of FIG. 47 showing certain internal components in ghost lines.
- FIG. 51 is a side elevation of FIG. 50 .
- FIG. 52 is an isolated enlarged perspective view of a collection funnel and actuatable door for the bagging station of FIG. 46 .
- FIG. 53 is a side elevation of FIG. 52 .
- the embodiment will be discussed in the general environment of processing seed corn for breeding purposes.
- the embodiment would preferably be housed in a suitable building, in a controlled environment, preferably shielded from outside environmental conditions.
- FIG. 1 diagrammatically illustrates a corn seed processing/conditioning system 10 .
- a controller 12 e.g. RunTime RT-505 from Ann Arbor Technologies of Ann Arbor, Michigan
- controller 12 and computer 14 operate with system 10 to provide an automated production line for taking ear corn that has been bagged into mesh bags 16 and dried, each including a removable machine readable tag 18 , sometimes called a harvest tag, (here bar coded), and perform a variety of functions to process seed from the ear corn to the point where the seed corn is bagged into shipping bags 20 bearing machine readable labels 22 in condition for further use, e.g., for continued use in corn breeding programs.
- a harvest tag 18 sometimes called a harvest tag, (here bar coded)
- Ear corn samples from particular field plots are bagged. Bar codes are generated by known methods with identifying information about each sample. The identifying information is correlated to a data base format that can be used in maintaining an overall seed inventory and control system for a plant breeding program.
- system 10 automatically processes or conditions the sample seed.
- system 10 validates each sample, keeps track of each sample, and can gather additional information about the sample. This additional information can be used to update the database about the sample, and can be transferred and used by other systems.
- Samples are conditioned in less time, with less chance for error, while automatically tracking and gaining additional information and knowledge about the sample.
- FIG. 1 illustrates diagrammatically an example of a system 10 , including various components and stations in a continuous processing line.
- the components can vary in number and function.
- Programmable controller 12 is in electrical communication with a number of actuators, sensors, and computer 14 via an Ethernet network (indicated diagrammatically by reference number 46 ). Controller 12 includes a display and a touch screen for data entry. Controller 12 , in combination with computer 14 , controls much of the operation of system 10 , and allows operator initialization and adjustment of certain parameters.
- System 10 is linked not only by the conveyance path 29/33/35 from station to station, but also a combination of electrical and pneumatic circuits. These will be discussed in more detail later.
- system 10 uses air transport tubes to convey batches of seed from station to station.
- Electrically controlled line vacs supply pressurized air to the transport tubes.
- the electrically controlled line vac actuators will be referenced by LV 1 , LV 2 , LV 3 , LV 4 , and LV 6 .
- Air transport is not the only way to move seed samples, but is considered preferable, and perhaps the best presently known way for conveying seeds for a number of reasons.
- Gates and doors are operated by electrically controlled pneumatic actuators (solenoid operated) referenced by PN 1 , PN 2 , PN 3 , PN 4 , PN 5 , PN 6 , PN 7 , PNB, PN 9 , PN 10 , PN 11 , PN 12 and PN 13 .
- the actuators have two-way ported cylinders, they are actuatable to one of two states by placing higher pressure on one side of the cylinder ram and creating lower pressure on the other side relative to one state or the other. Many of these actuators hold gates or doors in a normally closed state, but when actuated, move a gate or door to an open state to create a pathway for seeds to pass.
- controller 12 controls the actuators as follows. Controller 12 communicates with solenoids associated with each actuator by sending an electrical signal which energizes the solenoid. The solenoid energizes its actuator supplying compressed air to a pneumatic cylinder (two-way) that has two states. The compressed air pushes the ram of the air cylinder. This mechanical force is then usable to open and close doors or gates, or open and close pathways for compressed air.
- the electrically controlled actuators can have electrical sensors (e.g. Model BIM-PST-AP6X-V1131 inductive sensors from Turck of Minneapolis, Minn) associated with them which inform controller 12 of the state of the actuator. Thus controller 12 can monitor whether a gate or door is open or closed. These sensors are referenced by S 1 , S 2 , etc. the sensor references corresponding to the pneumatic actuator references.
- electrical sensors e.g. Model BIM-PST-AP6X-V1131 inductive sensors from Turck of Minneapolis, Minn
- Computer 14 and controller can include a display and a data entry interface, e.g. touch screen or keyboard.
- Computer 14 could reprogram controller 12 , or controller could be directly reprogrammed. An operator could therefore quickly change such things as the timing of operation of the various controller-controlled components of system 10 .
- Controller 12 would be programmed to send digital instructions at appropriate times to any of the electronically controllable components in system 10 .
- Software could time the operation of the various components so that they did not have to continuously operate, even though no ear corn or seed was at the particular station.
- software could control the components to allow more than one batch of seed to be in process, but in different sections of, system 10 at the same time.
- Bar code reader 24 is interfaced to controller 12 which communicates with computer 14 for manipulation or storage of information via Ethernet network 46 .
- System 10 is therefore not only highly automated and autonomous, it is flexible. Safeguards can be programmed into system 10 . For example, sensors can inform controller 12 that a certain gate is ajar. The programming can stop processing until the gate is checked. Other checks, error alarms, and monitoring can be built into system 10 .
- system 10 must be initialized prior to operation. This includes calibration.
- cleaner 30 may have to be adjusted for different sizes of seed samples.
- Color sorter may have to be adjusted for different types of seeds (a color indicating a defect for one type of seed may be the color of health of another seed).
- Timing can be adjusted for different numbers of seeds per batch. For example, programming can wait for a pre-set time period for a function in one of the stations to be complete. This time period may need to be extended for larger batches of seeds or shortened for smaller batches.
- the first station is sheller 28 (see FIG. 1 ).
- sheller 28 receives ear corn as input and mechanically separates the seed from the ear. Bags 16 are brought to sheller 28 .
- a bar code reader 24 is used to read the tag 18 associated with a bag 16 to validate the information that has been encoded in a bar code on tag 18 . This validation process, made possible by the pre-existing knowledge base in a data base, essentially authorizes the process of that batch of seed through the processing line.
- a conveyance system moves the seed from the output of sheller 28 to the second station, here referred to collectively as cleaner 30 .
- Cleaner 30 can be a screen cleaner. Other methods or devices could be used.
- a plurality of devices or functions could be included in and/or conducted by cleaner 30 . Examples shown include scalping the seed (see 30 B) and a preliminary sizing sorting of the seed (see 30 C).
- FIG. 1 illustrates a color sorter, such as are known in the art.
- Sorter 36 functions to select desirable seed. For example, a color sorter attempts to use color or gray scale to discriminate between healthy seeds and diseased or damaged seeds. Some undesired seeds make it through cleaner 30 . Sorter 36 attempts to remove them.
- a conveyance system then moves the batch of seed to the fourth station, bagger 32 , where the seed selected by the sorting system is accumulated and bagged for use.
- additional functions can be performed on the batch of seed in the system. Certain characteristics of the seed can be measured. Examples are moisture of the seed (see 36 B), temperature of the seed (see 36 B where the temperature compensation may be used to determine moisture) and weight of the seed (see 36 C). The batch of selected seed can also be counted (see 36 E). All of these functions are accomplished autonomously.
- FIG. 1 shows an near infrared (NIR) analyzer 36 D that possibly could also be used to derive other characteristics about the seed. Examples include protein levels, starch levels, and other information. NIR analysis is well known in the art. Information derived from such sensors and analyzers, the examples of which are shown at 36 B-E, can be communicated to the computer which can correlate the information with the batch of seed sample in the database.
- NIR near infrared
- the computer can generate labels 22 which can add derived information to the label, here including a bar code.
- the computer can also generate a label 45 for a box 44 .
- the bar code for box 44 could contain information about which bags of seed samples are in the box, shipping information, and/or other information.
- FIGS. 2A-C illustrate one specific methodology that can be utilized with system 10 . This method could be implemented through appropriate software written in appropriate language for use by controller 12 and computer 14 . It will be discussed in more detail later. Of course, variations can be used.
- FIGS. 3A and B, 4 and 5 diagrammatically illustrate the information flow structure and parallel flow of information and product through system 10 . Note how system 10 has in real time validated it is processing the right sample and immediately adds to the knowledge base regarding the sample as it is conditioned for packaging and shipping.
- the central database can run as an application on an enterprise-wide network.
- a database utility takes information and puts it into Microsoft EXCEL files (or comma separated values (CSV) files) into a local Microsoft ACCESS database files, copied from a remote server.
- a small application communicates with controller 12 and gives information back to controller 12 ; and lets it process.
- system 10 /controller 12 picks up and sends information and time/date (and sequence #) to computer 14 which can generate a label.
- FIGS. 6-7D give an assembled view of stations 28 , 30 , 36 , and 40 and the conveyance mechanism between them.
- a control enclosure 50 (approx. 6 ft. tall by 6 ft. wide by 2 ft. deep NEMA 12 enclosure) for electrical and pneumatic circuitry is also shown, along with raceway 52 from enclosure 50 to distribute that circuitry to the stations and the controller.
- FIGS. 8-17 illustrate some of the contents of enclosure 50 when installed as well as the electrical and pneumatic circuits for system 10 . These figures give details of one way to build these sub-systems.
- FIGS. 18-25C illustrate examples of graphic user interfaces (GUIs) such as could appear on display 13 of controller 12 or a display of computer 14 related to initialization and set-up of system 10 and formatting of labels printed for samples and boxes for samples that are processed by system 10 .
- GUIs graphic user interfaces
- FIGS. 26-53 illustrate stations 30 , 36 and 37 , and associated components, in more detail.
- FIGS. 2A-C An exemplary specific seed sample conditioning process, in accordance with the programming of FIGS. 2A-C , will now be described with respect to the specific apparatus shown in FIGS. 6-53 . Steps of the programming of FIGS. 2A-C will be called out while referencing each processing station and/or parts thereof with reference numbers.
- the different stations and the devices and methods used at the stations in system 10 can vary. For example, one device may be able to adequately perform the functions accomplished by cleaner 30 and sorter 36 in FIG. 1 . Some seed may not need to be shelled. Counting may not be required, or any evaluation like that which NIR analyzer is capable of.
- System 10 is initialized.
- the operator sets parameters via keyboard or touch screen 15 associated with computer 14 or controller 12 for the particular product being processed. For example, certain types of corn have larger kernels than other types. Different settings on cleaner 30 and sorter 36 may be necessary for accuracy of the system. Such settings normally will have been calibrated by prior testing of system 10 with the same or similar type of seed.
- Ear corn 19 can be dried in a system such as disclosed in U.S. patent application Ser. No. 09/498,277 to inventors Hunter, et al., bagged in bags 16 , each of which can be bar code labeled as previously described (see FIG. 2A , step 51 ).
- bar code labeled as previously described
- system 10 By scanning the bar code (step 53 ), information regarding the nature of the ear corn sample and the essential facts for records can be obtained by system 10 and stored in computer 14 .
- the information can be displayed to an operator (step 54 ), and a decision can be made whether to shell corn or ship it on the ear (steps 56 , 58 ). Note that a worker could at this point manually inspect the ear corn and reject it.
- the process to the left of box 58 in FIG. 2A could be followed.
- the ear corn 19 could pass through or bypass system 10 until bagger 37 , where the ear corn 19 could be placed in a new bag(s) 20 , the database of computer 14 can be updated, a label can be updated (a new label can be created by label generator 42 ), and bag(s) 20 closed and loaded into a shipping container 44 , which itself could have a label describing its contents, if desired.
- a bar code reader or scanner 24 (e.g. Model 5312HP from PSC, Webster, N.Y.) is positioned to read a bar code from a pre-created bar coded tag 18 on ear corn bag 16 .
- the bar code on tag 18 could contain information such as indicated in Table 1.
- a bag 16 of ear corn (typically comprising 8 to 10 ears) can be manually opened and ear corn 19 poured or loaded into sheller 28 .
- bar code reader 24 can read information that identifies the contents of bag 16 .
- Computer 14 therefore can store and keep track of the relevant information about the ear corn from bag 16 throughout the processing of system 10 .
- This information can be stored in a memory, text file, or a data base as well as in a database.
- the term “data base” is to be broadly construed to refer to any set of data regardless of its format, the type of application associated with the data (i.e. spreadsheet, database), the type of storage used to store the data, etc.
- a local database 47 can be created in computer 14 with such identifying information. Local database 47 can be in contact with a central database 48 .
- FIG. 3B This flow of information on an enterprise wide basis is best shown in FIG. 3B .
- Information including a shipping location, the year of the seeds, the season of the seeds, the location of the seed plots, a test plot identification number, seed experiment information, whether a particular seed sample is genetically modified, and other user-defined information that may be stored in an enterprise wide database 48 is then used in a local database 47 .
- a database conversion utility may be required, for example the enterprise wide database information may be converted in part to a file of comma separated values or another universal format.
- a database utility may be required to import the information from a universal format to the format of local database 47 .
- the local database 47 may be a Microsoft Access database and the database utility may be a stand-alone Microsoft Visual Basic application.
- the seed processing system 10 then adds information to the local database 47 during seed processing, the updated local database 47 A containing this additional information.
- the database utility can then be used to extract the database to a comma separated value (csv) file for loading into the enterprise wide database 48 .
- the database utility creates and uses a Microsoft Access database.
- the database is made up of an Entries table, a Box table, and a BoxNumber table.
- the Entries table contains all of the sample data including the box ID the sample is stored in.
- the Box table contains all of the information for a box such as shipping weight and sample count.
- the BoxNumber table is used to build a new box entry in the Box table.
- the Box ID of the Box table is related to a data field in the Entries table.
- One field in the Entries table is related to the Box identifier of the BoxNumber table.
- validation means that the ID of a bag 20 (from label 18 ) is checked against local database 47 , which has downloaded from central database 48 a list of requested samples.
- the central database can have a complete listing of all corn breeding experiments on-going around the world. The initial validation essentially asks whether the sample ID from tag 18 “exists”, so to speak, in any of the experiments in the central database.
- system 10 If the ID (identification) does agree, system 10 is authorized to process that sample. If it does not agree, an error is detected. The operator can be notified on display 13 and controller 12 does not allow gate 62 to sheller 28 to be opened.
- PC 14 makes another initial decision based on information scanned in from harvest tag 18 . It asks whether the sample type in bag 20 will run on system 10 . In other words, it checks whether the settings and operational parameters for each of the stations of system 10 are set to handle the type or nature of the sample identified on label 18 . For example, if the sample is a certain type of corn that needs more time in the cleaning station than what system 10 is set for, an error or alert is given to the operator via display 13 , and sheller door 62 does not open. Thus, system 10 automatically assists in its correct and efficient operation.
- System 10 has three basic setups, primarily based on the size/shape of the seeds of the samples and on the volume or amount of seeds for each sample. If the information scanned from a harvest label 18 indicates the wrong initial setup of system 10 , the operator is alerted and can deal with it then, instead of wasting the time and possibly ruining the processing of the sample.
- Computer 14 is a PC-based processor with an associated display 15 and keyboard and could be mounted in a stand or table at or near the bagging station. Operator controls and the display allow the operator to monitor certain aspects of the operation of system 10 , as well as enter data or instructions.
- Controller 12 is a programmable intelligent digital device (RunTime PC RT-505 from Ann Arbor Technologies of Ann Arbor, Mich.). It could be a programmable logic controller or other PC optimizer for data acquisition for process control. Controller 12 has an integrated display/touchscreen user interface 13 , and is in an approximately 20′′ by 16′′ by 8′′ enclosure on a stand at or near sheller 28 . Controller 12 handles input and output from and to the actuators and sensors of system 10 via I/O bases (see FIGS. 8-11 ) that communicate over an Ethernet connection. An Ethernet controller is placed in the passive back plane of controller 12 , permitting signals to be sent to and received by other I/O within controller 12 . Input/output drivers energize relays in the back plane that open or close solenoids for the pneumatic actuators.
- PC 14 runs a Microsoft Visual Basic (VB) application. PC 14 communicates to controller 12 using TCP/IP. PC 14 polls controller 12 for correct status of I/O lines, essentially by one-way polling (approx. once every 50-100 milliseconds), and then writes back a new status as needed. Controller 12 is programmable (e.g. Think and Do language).
- VB Microsoft Visual Basic
- the apparatus of system 10 allows an automatic, continuous, real time processing of seed 25 , including tracking of a batch of seed that needs to be kept together, or at least precisely identified prior to, during, and after the processing.
- System 10 assigns an ID string to each sample.
- PC 14 /controller 12 push this string through station to station of system 10 to track each sample.
- up to five samples can simultaneously be in system 10 , but the invention is not confined to this.
- each sample takes less than one minute through system 10 .
- system 10 knows where each sample is in system 10 at any given time, and thus knows when it is at bagging station 37 so that it generates the correct identification label for the package for each sample, even though multiple samples may be proceeding through system 10 .
- FIGS. 18 through 19 show graphical user interfaces of controller 12
- FIGS. 19-25C show graphical user interfaces of PC 14
- FIG. 18 shows the relationship of a number of different screens that may be accessed from a product selection screen (see also FIG. 19A ). These screens include a weight calibration screen, a moisture calibration screen, a run screen, a settings screen (see also FIG. 19C ), a manual control screen (see also FIG. 19B ), a color sorter testing screen, and a seed counter testing screen. Examples of timing between stations and set-ups for corn are given in the settings screen of FIG. 19C . Examples of the types of operator over-rides are given in the manual operator screen of FIG. 19B . Examples of the database fields and how they are used to create bag and box labels are shown.
- FIG. 2A illustrates at step 60 and step 62 if a decision is made to ship the ear corn, the seed can be aspirated and accumulated or controlled as to rate of presentation to the next station.
- System 10 can check if it is free or allowed to proceed to the next process step (step 64 ).
- System 10 could instruct a kernel clean process (see step 66 ). Aspiration could be integrated into sheller 28 .
- Sheller 28 (e.g. Model ECS by Almaco, Nevada, Iowa) functions to shell ear corn 19 .
- a variety of shellers are commercially available. Once a seed sample in a bag 16 is validated (after bar code 18 is scanned and computer 14 validates), the ear corn from that bag 16 are loaded into a hopper in sheller 28 .
- Sheller 28 is turned on and runs constantly.
- Sheller input gate 62 is opened by an electrical instruction from controller 12 (output BO) to an electrically controlled pneumatic actuator (PN 1 ) (see also FIG. 17 ).
- PN 1 electrically controlled pneumatic actuator
- Non-seed e.g. cob, stalk, leaves
- Non-seed can be discharged (see reference letter D, FIG. 1 ) via a chute or conveyor to be discarded or otherwise used.
- Line vac LV 1 (e.g. model 6063, from Exair, Cincinnati, Ohio) is activated by controller 12 . It is driven by solenoid controlled compressed air and causes the shelled corn to be pulled from the outlet of sheller 28 into air tube 60 and is conveyed first horizontally then vertically to cyclone 71 at the top of cleaner station 30 . Pressurized air is delivered from the source ( FIG. 14 ) via 1 ⁇ 2′′ O.D. polyethylene tubing and used by the 11 ⁇ 2′′ I.D. inlet and outlet air vac.
- All air tubes in system 10 are clear PVC food grade tubing, with reinforcing spiral to maintain roundness (size is approx. 13 ⁇ 4′′ O.D., 11 ⁇ 2′′ I.D., available from McMaster-Carr of Ill.). Such tubing is flexible. This makes it easy to install and allows the operator to visually inspect the lines.
- An aspirator 32 optionally could be placed at the outlet of sheller 28 or integrated into sheller 28 to aspirate the seed as it is leaves sheller 28 . This could assist in removing dirt, debris, or otherwise pre-clean the seeds.
- Controller 12 instructs cleaner 30 to perform a kernel clean cycle after each set of seeds is processed by cleaner 30 (see steps 66 and 68 , FIG. 2 ) to remove residual material stuck in the screens, such as described previously with respect to cleaner 30 A in FIG. 1 .
- the seed can be scalped (step 70 , FIG. 2 ) and then sieved (step 72 , FIG. 2 ).
- undesired seed e.g. damaged
- undesired seed can be automatically discarded from the processing path but accumulated (step 72 , FIG. 2B ). If it is determined, for example by manual inspection by a worker, that desirable seed is in the bagged discard seed, it can be recovered and manually inserted in an appropriate “clean” seed bag, e.g., if additional seed is required to meet a desired minimum seed count for the sample (step 74 ).
- Cleaner 30 separates desirable seed based upon size and/or shape.
- Cleaner 30 consists of two perforated metal screens, each paired with an underlying pan.
- Top screen 260 A has perforations with the diameter of 26/62′′ and is referred to as the scalping screen.
- Lower screen 260 B has holes with the diameter of 18/64′′ and is referred to as the sieving screen.
- the scalping screen's holes are sized such that desirable seed pass through its holes onto its associated pan 262 A.
- the sieving screen's holes are sized such that broken seed or undesirably small seed pass through its holes onto the sieving screen's pan 262 B.
- Cleaner seed flow Seed flows from sheller 28 into cleaner feeder bucket 72 .
- controller 12 When controller 12 has determined that cleaner 30 is ready to receive seed, it opens an associated solenoid valve to energize the two-stage pneumatic actuator PN4/5.
- the first stage of actuator PN4/5 opens cleaner feeder bucket door 74 to 1′′. This limited opening allows seed to flow onto scalping screen 260 A at a controlled and desirable rate.
- Desirable or “clean” seed flow The desirable seed flows through scalping screen 260 A onto pan 262 A and then falls from the lower end of pan 262 A onto lower or sieving screen 260 B. The desirable seed then flows off screen 260 B and exits the cleaner at 266 B.
- Discard or “dirty” seed flow Seed that is too large to pass through scalping screen 260 A slides across the scalping screen 260 A onto lower pan 262 B associated with the sieving screen 260 B. This large seed or debris exits the cleaner at 268 B. Seed that is too small is separated from the desirable seed by falling through sieving screen 260 B onto sieving screen pan 262 B and exits cleaner 30 comingled with large seed and debris using 268 B.
- Cleaner clean-out cycle Cleaner 30 and its associated systems have been optimized to avoid the cross-contamination of seed samples.
- the first point in the clean-out cycle is for the second stage of the two-stage pneumatic actuator PN4/5 on cleaner feeder bucket 72 to open door 74 completely. This allows any large debris that might potentially plug the bucket's opening to slide onto cleaner 30 .
- the duration of the opening of each of the two stages is controlled by controller 12 and is optimized for the products or sample sizes being run. If the bucket is not emptied of debris and seed, it might jam and then allow seed from the next sample to leak onto cleaner 30 prior to the removal of the previous sample.
- Scalping screen 260 A is the first screen to receive seed in cleaner 30 .
- the seed sample from cleaner feeder bucket 72 quickly flows over or through the scalping screen 260 A.
- Cleaner 30 has air jets AJ 1 and AJ 2 that blow across the sieving screen 260 B and its associated pan 262 B. Air jets AJ 1 and AJ 2 are directed at an angle such that all seed or debris are propelled off sieving screen 260 B and pan 262 B prior to the cleanout cycle.
- the pneumatic cylinder or actuator 288 A (PN 3 ) extends and moves pan 262 A upwards so that it strikes the bottom of scalping screen 260 A dislodging any seed or debris stuck in scalping screen 260 A.
- This cycle is repeated quickly at least twice to dislodge and rapidly move seed off scalping screen 260 A.
- the length of time allowed for each portion of the seed sample cleaning process and then for the clean-out process is optimized for different materials and sample sizes and is under the control of controller 12 . Contaminating seed is not sensed by system 10 , but in the future it might be possible for system 10 to know whether seed has finished moving through the system and whether or not contaminating seed or material remains.
- Sieving screen 260 B receives the material that flowed through scalping screen 260 A and any seed or debris that is too small flows through the holes in sieving screen 260 B and drops onto pan 262 B.
- pneumatic actuator 288 B (PN 2 ) moves sieving screen 260 B downwards onto pan 262 B, thereby dislodging any seed stuck in the holes of sieving screen 260 B.
- This up and down movement occurs several times in quick succession while the cleaner air jets AJ 1 blow any remaining or dislodged seed off sieving screen 260 B.
- This dislodged seed, plus any other good seed is discharged from cleaner 30 at 266 B.
- the air jets (AJ 1 ) are controlled by controller 12 that energizes a solenoid controlled air valve that controls the pneumatic cylinder 288 A.
- Cleaner 30 of FIG. 26 is a screen cleaner or sizer placed on top of a shaker table 75 , such as are commercially available (e.g. Model Innova 2350 from New Brunswick, Edison, N.J.—gyrational table operated at 200 rpm, 1′′ stroke length—counter-balanced to reduce stress).
- Table 75 assists in the cleaning/sizing process as seeds from a sample enter and travel over the two screens of cleaner 30 .
- device 30 could have controller-controlled automated equipment to perform any of the functions of cleaning the seed, scalping the seed, or sorting the seed by sieve or other method.
- FIG. 1 illustrates three such functions.
- Cleaner 30 can be any device which separates seed 25 from non-seed.
- Non-seed material can be directed to a discharge D.
- Cleaner 30 could also size and/or separate seed based on one or more sensed criteria. Criteria could include, for example, size of seed and/or shape of seed (e.g. flat vs. cylindrical). A variety of types of sorting and sorting devices are known in the art. For example, seeds 25 can be sorted by size. It might be determined that seeds of less than a certain size are not good candidates for use in breeding. Non-desired seed or material could be directed to a discharge D where it could be directed for further or different use.
- Cleaner/scalper/sieve 30 can be either one device or a combination of devices.
- cleaner 30 is essentially a seed sizer. As is well-known, this could be on the basis of size or shape (e.g. flat versus cylindrical) or both.
- cleaner 30 is self-cleaning. In many screen cleaners, some seeds and debris get caught in the openings of the screen. After each cleaning, scalping, sieving, or sorting process, remaining seeds and debris on the screen must be manually removed.
- System 10 provides for automatic self-cleaning by continuously running shaker table 75 , which continuously urges anything on the screens to move, and by moving one of the cleaner screen and a plate against one another to dislodge anything stuck in the screen openings.
- cleaner 30 It is important to clean cleaner 30 after each cycle, not only to remove debris for optimal sorting by cleaner 30 , but also to remove any seeds. If seeds are left, they may contaminate the next sample that is processed. For example, one does not want to have a genetically modified seed from one sample inadvertently in a non-genetically modified sample.
- Cleaner 30 has two air jets AJ 1 and AJ 2 .
- the first aid jet AJ 1 is positioned above the sieving screen 260 B.
- the second air jet AJ 2 is located below the sieving screen 260 B and above the pan 262 B.
- the controller 12 energizes the solenoid of the second air jet AJ 2 during the cleanout cycle, after the scalping screen's pan moves upwards driven by the action of pneumatic cylinder 288 A.
- the cylinder retracts and extends for three complete cycles.
- the controller waits a small time period (such as 0.5 seconds) and then the second air jet AJ 2 is energized and compressed air blows across the sieving screen pan 262 B for a period of time (such as 3.5 seconds).
- the screen 260 B is driven downwards onto pan 262 B. This process is repeated three times. This process can be realized by turning on an actuator, waiting a short time (such as 250 ms) and turning off the actuator thus creating a rapid slapping action. During this cleanout process the first air jet AJ 1 is energized for 5.5 seconds. This combination of mechanical actions is performed to dislodge seed from screens 260 A and 260 B. The blasts of air from the air jets AJ 1 and AJ 2 result in the cleaner being free of potential contaminant seeds.
- FIGS. 27-36 illustrate an embodiment of the cleaner 30 illustrated at FIG. 26 in more detail.
- Flat screen 260 having a pan 262 underneath it can be operated as is conventional.
- Pan 262 can be connected pivotally to screen 260 by links 264 .
- a rod 265 can be connected to links 264 on one side of the device and terminate in an actuator 267 .
- Outlets 266 and 268 from screen 260 and receiving pan 262 respectively would channel seeds to the respective desired locations.
- actuator 267 would pull arm 265 to the left. This in turn would pull links 264 in the fashion shown in FIG. 29 which would raise pan 262 up against the bottom of screen 260 .
- Pan 262 would be configured to have a surface that corresponds with the bottom surface of screen 260 and serve to push any debris or seeds lodged in perforations in screen 260 out, as shown by comparing FIGS. 30 and 31 .
- FIGS. 32-34 show a dual staged flat screened sizer with a seed cleaner such as illustrated in FIGS. 35 and 36 .
- a housing 270 contains screen/cleaner 260 A/ 262 A in its upper portion positioned at a 10 degree angle relative to the horizontal plane, and screen/cleaner 260 B/ 262 B in its lower portion positioned at a 5 degree angle relative to the horizontal plane. These angles are selected to help seed move quicker over top screen 260 A, and essentially allow screen 260 A to be self-cleaning; while the smaller angle helps a longer residence time for seeds on bottom screen 260 B.
- Screen 260 A is held stationary in housing 270 .
- Pan cleaner 262 A is movable between a lowered or away position shown in FIG. 33 , to a position up into abutment with the bottom of screen 260 A as shown in FIG. 34 .
- an elongated rod 272 A is connected via pins 274 A and 276 A to pan 262 A through the side walls of housing 270 via arcuate slots 278 A and 280 A.
- a first link 282 A is connected at one end to pin 274 A and a second end to pin 287 A which travels in arcuate slot 286 A.
- Link 282 A is pivotally fixed to the side of housing 270 at both 284 A.
- a second link 275 A is connected at one end to pin 276 A and is pivotally fixed to the side of housing 278 by bolt 292 A.
- An actuator 288 A is mounted to an interior end wall of housing 270 at mounting plate 290 and at an opposite end has an extendable arm 290 A connected to pin 287 A at a generally intermediate position. As shown by comparing FIGS. 33 and 34 , when end 290 A of actuator 288 A is retracted, pin 262 A is in a lowered position. When end 290 A of actuator 288 A is extended, links 282 A and 275 A are pivoted to opposite positions relative to arcuate openings 278 A, 286 A, and 276 A and pan 262 A is brought up against the bottom of screen 260 A to perform a cleaning function.
- this action can occur while the entire device is oscillating or gyrating (at 200 rpm), or such movement can be stopped during the cleaning process. It has been found that two quickly repeated movements of pan 262 A against screen 260 A is preferable to one such movement as it creates some vibration to assist in dislodging material from the openings in screen 260 A.
- FIG. 33 the components are essentially the same although their configuration and orientation differs as shown.
- the embodiment of FIGS. 33-35 allow sorting to occur at two succeeding levels. Seeds are output at outlet 266 B and 268 B respectively for use or further conditioning.
- FIG. 36 is similar to FIG. 33 except the position of actuator 288 A differs.
- the cleaner would perform cleaning on individual screens either through self motorization or by utilizing the movement of each screen itself. Therefore, the embodiments do not require any complicated attachment to a single drive force even if there were multiple screens involved. Variations obvious to one skilled in the art will be defined by the claims. For example, the embodiments can be utilized for a wide variety of screen sizes. The embodiment of FIGS. 26-36 is believed to be better for smaller sized screens. Cleaner 30 is connected to controller 12 which controls the pneumatic actuators for cylinders PN 2 and 3 and air jets AJ 1 and AJ 2 for the self-cleaning process.
- FIGS. 26 and 27 illustrate how desired seed or “product” is funneled to clean seed or product hopper 80 and unwanted material and seed, “dirty seed” is funneled to dirty seed hopper 81 .
- Actuators PN 6 and PN 7 respectively operate slide gates that control the release of seed from either hopper. Upon instruction from controller 12 , one or the other or both slide gates 82 and 83 are moved from normally closed to open positions. “Cleaned” seed is transported by transport tube 100 (by actuation of line vac LV 2 ) to sorter station 36 .
- the slide gates are essentially a plate with a portion big enough to block the pathway between the hopper and its discharge, and another portion with an opening generally matching the size of the pathway out of the bottom of the relevant hopper. Its associated actuator simply slides the gate to the desired state, closed or blocking the pathway; or open which unblocks the pathway. This can be handled well with a linear double acting pneumatic cylinder.
- a perforated section 108 of tube 100 could be used below bucket 80 .
- This 4′′-5′′ section could be made of galvanized metal, 11 ⁇ 2′′ I.D., 14 gauge, with several hundred 3/32′′ offset holes 109 . This would assist the movement of seeds through the respective air tube, especially where relatively large volumes of seed accumulate, for example, possibly at the cleaner bucket and at the color sorter bucket for good product. It allows easier air movement into the conveyance tube to transport the seed sample to its next destination. Otherwise, the use of air-tight tubes and gates may not provide sufficient volume and velocity of air to fluidize the seed. Perforated sections like section 108 could be used at other parts of system 10 , particularly where relatively large amounts of seed need to be conveyed.
- step 74 the seed is accumulated (step 74 ) and a kernel clean process is instructed by controller 12 (steps 76 and 78 ).
- This self-cleaning could include operation of an air jet AJ 3 to rid color sorter 36 of any seeds that might be lodged or otherwise remain in color sorter 36 .
- Active cleaning of color sorter 36 is accomplished by an air jet AJ 3 at the funnel 103 and chute 104 (see FIGS. 37B and 40 ).
- Controller 12 can operate pneumatic conveyor 33 to move seed 25 to the step of color sorting at reference numeral 80 in FIG. 2B .
- Color sorting can be used to remove diseased, damaged, or otherwise undesirable kernels based on color or other differences that can be discriminated in a video imaging of at least a portion of a seed. The process of color sorting alone can eliminate a significant part (estimated at half) the manual labor involved in such processing of corn seed.
- Non-destructive evaluation and/or automated counting can take place.
- Non-destructive evaluation can include, for example, the types of sensing previously described; e.g. measurement of moisture, weight, oil content, etc.
- Database in a computer system can instruct the process regarding the type and amount of seed that is desired (step 86 ).
- the system can compare the actual count (step 82 ) to the requested seed count (step 88 ) as well as check whether moisture or other characteristics is/are acceptable (step 90 ).
- NIR analyzer 36 D of FIG. 1 could be used to select only high oil content seed 25 based on NIR sensing and sorting similar to the color sorting shown in FIG. 3 .
- Air transport 100 ( FIG. 37B ) is another pneumatic conveyor, with a tube operatively connected to a controller-controlled pressurized air source 34 that can lift seeds 25 vertically.
- color sorter feeder bucket actuator PN 8 opens hinged door 110 ( FIG. 40 ) which opens a pathway for the seeds to fall into sorter feeder funnel 103 , and then into color sorter seed chute 104 .
- Color sorter 36 is commercially available model ScanMaster 200 IE from Satake, Houston, Tex. Color sorting is well known and has been used to sort such things as rice, peanuts, cubed vegetables, beans, potato chips, and frozen foods. It uses a digital imagining device or camera 38 to discriminate, on a seed 25 by seed 25 basis, whether or not to accept a seed 25 based on information discerned by imaging at least portions of each seed 25 .
- Model 200 IE normally uses a vibratory feeder as an input of materials into the color sorter. However, color sorter 36 instead uses a feeder bucket 102 with a gate 110 controlled by controller 12 .
- FIG. 38 The basic principles of operation of a color sorter are illustrated at FIG. 38 .
- a conveying mechanism 348 controlled by a controller-controlled actuator 350 , receives incoming seeds 25 from source 333 .
- the plurality of seeds 25 are presented serially and at generally uniform velocity along some type of conveyor 348 or path (see seeds 25 A-H in FIG. 38 ).
- Color sorter 36 ( FIGS. 37A-C ) directs seeds from feeder 102 into a plurality of generally parallel paths or channels, so that sorting of each channel can occur simultaneously for greater throughput. In comparison, FIG. 38 shows just one path or channel for simplicity of illustration.
- Color sorter 36 ( FIGS. 37A-C ) also uses gravity to convey the seeds through the channels, see seed funnel 103 and ramp 104 in FIGS.
- color sorter 36 encourages a seed trajectory of a consistent speed.
- Color sorter 36 is set up to handle on the order of 200 seeds per channel per second.
- Funnel 103 concentrates the seeds accumulated in feeder bucket 102 into four principal channels, although the ScanMaster accommodates 10 channels This is because it is believed a steady flow gives better results than an intermittent flow. This results in a throughput on the order of 800 seeds per second. For typical approximately 2000 seed samples, one sample can be color sorted in approximately 5 seconds. This represents a very substantial savings in time over manual inspection of 2000 seeds.
- a light source 354 of substantial intensity illuminates the seeds.
- a digital video imaging device 358 captures images of the illuminated seeds.
- a light bar control 356 and video processor/controller 360 are operatively connected to devices 354 and 358 to illuminate and digitally scan seeds 25 as they serially pass thereunder.
- the video scans are evaluated by processor 360 (and computer 14 ) against predetermined criteria based on visual characteristics of seed 25 . For example, diseased portions of harvested corn seed is usually darker in color than that non-diseased seed.
- seed 25 can be visually discriminated by comparison to adjustable color or darkness/lightness thresholds programmed into the system.
- two sides of the seeds can be illuminated as they fall in free space (two light sources are used, one above and one below the channels of falling seed).
- Two CCD imagers, one above and one below the channels, can be used to examine two sides of the seeds to more completely check for undesired seeds.
- a controller-controlled deflecting ejector 366 is positioned downstream of imaging device 358 .
- a ejection actuator 368 can operate ejector 366 to cause identified non-desired seed 25 to be physically deflected from conveyor 348 (see arrow 364 relative to seed 25 D in FIG. 38 ). It is calibrated to take into account the time between detection of a bad seed and the time to fire the ejector based on known velocity of the seeds.
- Ejector 366 could be an air jet (one per channel) and ejection actuator 368 a source of pressurized air.
- the dwell time of the air jets would be adjustable. More dwell time would increase the probability of propelling a seed designated for discard out of the falling stream of seeds, but also risks ejecting seeds that are not designated to be ejected. Adjustments can be made based on empirical testing.
- ejector 366 could be a pneumatic, hydraulic or electro-mechanically actuated arm or finger that would physically knock or push a ejected seed 25 from conveyor 348 , as controlled by actuator 368 .
- Non-ejected seeds 25 would pass ejector 366 without deflection and be directed by conveyor 348 to device 36 A, as shown in FIG. 1 .
- color sorter 36 A could take on many configurations.
- Color sorter 36 of FIGS. 37A-C and 39 - 45 uses gravity and seed chutes to send seeds moving down separate parallel paths and then into a free fall in those aligned paths. Light bars on both sides of the dropping seeds illuminate two sides of the sides.
- the CCD imager line scans and compares its pixel values to thresholds. Software recognizes what is probably a seed versus air. If a programmed threshold is exceeded, color sorter identifies which seed, and knowing its approximate velocity, operates an air jet (AJ 3 ) at the appropriate time to deflect an undesired seed to discard.
- Other configurations and methodologies could also be used.
- Counter 105 is a granular media sensor model GMC from Jacobson-Holtz Engineering, Perry, Iowa. It can provide controller 12 (via a mV signal) a reasonably accurate count (approx. +/ ⁇ 10%) of the number of seeds passing by. It provides count information for the batch being processed. The count is accurate enough to tell if there is enough seed in the processed sample to ship to meet a request. As a default, system 10 requires a minimum 500 seed threshold.
- a variety of such counters are available off the shelve.
- One example measures the dielectric constant of a gap between two sensing electrodes. Depending on the presence and amount of seed between the electrodes, a dielectric constant is sensed compared to when no seed is in the gap. When some seed is detected, it is considered an “event”.
- the change of dielectric constant can be calibrated based on the number of seeds by assigning a number of pulses to the sensed dielectric constant, and thus a total seed count for different samples can be derived automatically and quickly by comparing the number of pulses to the calibration.
- Photo-optical counters are another example.
- Swap valve actuator PN 11 operates a slide plate 114 which has two openings 115 A and B from which two tubular connectors extend, to which are attached air transport tubes 120 and 118 . In a trash cyclone position, plate 114 is slid to a position that allows discard seed access to transport tube 120 .
- plate 114 In a bagging position, plate 114 is slid to a position that allows the discard seed into transport tube 118 . This is selectable by the operator and under control of controller 12 .
- One opening 118 in fixed plate 119 is in fluid communication with line vac LV 5 .
- Slide plate 114 is slidable by actuator PN 11 to either align its opening 115 A or 115 B with opening 118 in fixed plate 119 .
- diverter valve 116 is positioned just ahead of (upstream of) counter 105 .
- Diverter valve actuator PN 9 can be operated by controller 12 to block the pathway of “good” (non-ejected) seed from color sorter 36 and instead direct such seed into diverter drop tube 117 , where it will fall into dirty seed funnel 112 . This can occur if counter 115 indicates a seed count threshold has been exceeded. Such diverted, but otherwise “good” (not “dirty”) seed will be handled with the discard or “dirty” seeds as previously described.
- a slide gate 107 at the bottom of color sorter bucket 106 is controlled by actuator PN 10 (under controller control) when controller 12 authorizes bucket 106 to be dumped. See FIGS. 37A , 37 C, and 39 .
- a near infrared spectroscopy device 36 D could be used not only to measure moisture, but a variety of other characteristics. See U.S. Pat. No. 5,991,025, to Wright, et al., incorporated by reference herein. Other examples are nuclear magnetic resonance (NMR), and Raman spectroscopy. Examples of characteristics that can be non-destructively sensed in essentially real time include but are not limited to oil content, protein content, moisture, color chemical properties, genetic make-up, width, length.
- Database 96 provides the necessary information to create the appropriate label (step 98 ) and/or the appropriate box and/or shipping label (step 100 ).
- System 10 and its methods of operation removes a substantial amount, if not most, of the manual aspects of such seed handling and processing. It can represent up to a four-fold increase in samples processed each day while using much less labor.
- the invention overcomes disadvantages of the prior art by dramatically reducing the labor required and by allowing a continuous flow of seed samples through the process under the control of a controller linked to a PC-based user interface and database.
- System 10 provides for a speedy processing of seed.
- System 10 allows for integration of several functions under automatic control.
- System 10 isolates seed, as needed, during the processing. It also reduces errors, particularly erroneous mixing between samples.
- FIGS. 46-53 show a bagger station 37 . Desired product from color sorter 36 is pneumatically conveyed via air transport tube 140 to bagging cyclone 141 , and then drops into bagging product bucket 122 ( FIGS. 49-51 ). Two measurements are taken in bucket 122 .
- Seed sample weight can be obtained (see device 36 C in FIG. 1 ).
- Load cells 123 (Model RL1010, 15 Kg load cell, 2 mV/V, with 4 channel summing box 4LC100-SEE from Rice Lake Weighing Systems, Rice Lake, Wis.) support bucket 122 on the framework of bagger station 37 . Load experienced by load cells 123 is translated into weight of the seed (weight of bucket 122 is subtracted) and is read by controller 12 .
- Moisture content is be measured by a controller-controlled device 124 .
- a variety of methods could be used to obtain such a measurement remotely and non-destructively in essentially real time.
- One example is a photo-acoustic method, such as is well known.
- Another example is use of near infrared (NIR) spectroscopy, such as shown and described in co-owned issued U.S. Pat. No. 5,991,025 to Wright, et al.
- Moisture probe 124 ( FIG. 49 ) is a capacitive moisture probe, such as is known in the art and mounts through the back of bucket 122 , extending into its interior so that it can extend into the seed that accumulates there.
- An interior bucket (see reference numeral 129 in FIG. 50 ) fills up first to get uniform volumes of seed from measurement to measurement. After interior bucket 129 is filled, additional seed spills out into bucket 122 . Other such methods are possible.
- system 10 can alert the operator on controller display 13 if a sample is too wet (e.g. above 131 ⁇ 2% water by weight). If the moisture threshold is exceeded, the operator could remove the sample and dry it to an acceptable moisture level before packaging it for shipment.
- a sample is too wet (e.g. above 131 ⁇ 2% water by weight). If the moisture threshold is exceeded, the operator could remove the sample and dry it to an acceptable moisture level before packaging it for shipment.
- System 10 does not automatically open the hinged bottom door 125 on bucket 122 (see FIG. 50 ) when it determines seed in bucket 122 is ready to bag. Rather, it sends a signal to the operator that the seed sample is accumulated in bucket 122 and ready to bag. The signal is a blinking light. Other types of signals are possible.
- System 10 waits for a response from the operator. The operator can acknowledge the signal, be prompted to have a bag or bags in place, and then affirmatively inform system 10 that the appropriate bag or bags is/are in place (e.g. by hitting a key or pushing a button (e.g.
- a microswitch could sense that a bag is in place and ready for filling. Controller 12 would then operate bagging product actuator PN 12 after weight and moisture measurements are obtained and the product would fall by gravity through bagging funnel 126 and into a bag mounted to bag holder 127 .
- bag holders 127 are mounted to bagging station 37 under funnel 126 , to accommodate different sized bags, as shown.
- Bagging station 37 also can bag seed or materials not selected in the processing cycle of system 10 , the “dirty” material.
- Such material can be conveyed from other parts of system 10 pneumatically to dirty bagging cyclone 121 where it would accumulate in dirty bagging bucket 132 . It can either be selectively pneumatically conveyed to another location (such as a dirty product dump 133 —see FIG. 15 ) or actuator PN 13 can be operated by controller 12 to open a bottom door 134 ( FIG. 53 ) in bucket 132 , and the dirty product would fall by gravity into dirty product funnel 135 and into a bag mounted to dirty product bag holder 136 .
- System 10 therefore allows decisions to be executed, such as where “dirty” seed is sent. It is many times desirable to save “dirty” seed, because it could contain acceptable seed which then would be available if the good sample is not enough or for warehousing for later use.
- system 10 it is possible to configure system 10 to add in one or more additional stations or functions prior to bagging of samples.
- another air transport could be added to convey a sample to a non-destructive evaluator like disclosed in Wright et al. U.S. Pat. No. 5,991,025, or for other processing or measurements.
- a label printer 42 e.g. Model 105SE from Zebra, Vernon Hills, Ill.
- PC 14 could print and apply a bar-coded label with desired information to bag 20 A.
- the information on label 22 could be in the form of Table 2.
- PC 14 can use a program to match up certain columns in its local database 37 with what is desired to be printed in label 22 .
- a program for example, commercially available program Bar Tender from Seagull Scientific, Inc. of Bellevue, Wash. can be used for this purpose. It makes it easy to format the label relative the database. Therefore, other or different information could be printed on label 22 , as desired.
- label 22 will always have a unique ID of the sample that can be correlated to the local and/or central database.
- Label could be part bar code and part human readable. For example, it could contain special information such as warnings, that would be human readable. One example is that it could explicitly state that the contents of the package contain genetically modified seeds, which have to be handled carefully.
- Software of system 10 thus creates a label for each validated sample that arrives at and is ready for bagging.
- Printer 42 can also create a box label 45 for box, which would essentially be a packing label for box 44 , listing by some identification, everything to be placed in box 44 .
- system 10 can accumulate total weight for multiple packaged samples and alert the operator when a total weight threshold is reached (for example, certain air freight or overnight air express companies have a maximum weight limit per box (e.g. 70 lbs.).
- system 10 presents a combination of apparatus that can receive ear corn 19 , automatically process it, and discharge it into bags 20 .
- components autonomously move the ear corn or seed corn from station to station. Additionally, system 10 instructs each station and the conveying components to perform their respective operations.
- samples with approximately 2000 corn seeds take on the order of 40 seconds per sample through system 10 .
- one or more automatic message can be generated and sent (e.g. via an email server such as are known) by system 10 after processing of a sample.
- PC 14 could use an application such as Microsoft Outlook and its MAPI function to automatically send emails to a designated person(s) notifying them of the date a certain sample had been processed and its count. Such persons thus are notified what to expect.
- the designated persons could be a key contact for the experiment, a customer/client of the plant breeder, or in-house personnel.
- System 10 can evaluate whether the sample meets a request from the central database. Other information or uses of the information about samples in system 10 of course are possible. Automatic facsimile, paging, or other notifications are possible.
- system 10 could be configured to provide just one or just a couple of functions.
- Use of color sorting alone will decrease labor and increase throughput.
- Use of an NIR spectrometry alone as a discriminator, would allow quick and accurate sorting based on, for example, high oil content.
- cleaning function may not be necessary.
- cleaning and color sorting might be combined in one station.
- soybeans no shelling is needed.
- a thresher is used instead of a sheller.
- the thresher used to receive plants and then separate the grain or seed from the straw.
- Cleaning could be performed with a spiral separator. Sorting might be done with an NMR device discriminating seeds based on oil content. Selected seeds could be placed into wells on trays instead of into bags.
- Computer 14 and controller 12 might be combined into one station, device or processor.
- the ability to automate all or part of the process can be combined with the automated labeling and bar code scanning processes to keep control of inventory and shipping.
- RFID identification or tags such as are commercially available. Any type of digitizable ID that can be machine read may be possible.
- Cleaner 30 could be a vision sorter using machine vision to determine size and/or shape of individual seeds and accept or discard them based on programmed parameters. Machine vision could also perform the color sorting function. Other non-destructive techniques, like those mentioned earlier, could be used to discriminate between seeds on other bases, such as oil content, constituents, etc.
- System 10 can include automatic dust collection. Using the ability to create vacuum, system 10 could vacuum up dust or lighter debris in system 10 and discharge it, or convey it to a discard bin for system 10 .
- System 10 could also be configured to run a clean out or unload cycle. System would run a conventional sequence of processes but without a sample to clean out lingering debris or seeds from system 10 .
- System 10 could optionally be used for any of its functions. For example, it could be used for a seed counter alone. Likewise, just for any of the other functions, or, for any combination of functions. For example, it could be used as a sheller/bagger, or a size sorter/bagger, or as a sheller/size sorter/color sorter.
- sensors could be used at locations throughout system 10 to detect the presence of a sample and be used by controller 12 to process each sample, as opposed to using primarily timing to control conveyance and operations of each station on a sample.
- System 10 could also be programmed to automatically adjust the settings of various stations based upon monitoring of what occurs with a sample at a first station, or based on information in the harvest tag. For example, if the time to shell a sample were measured at sheller 28 , system 10 could be configured to change its timing for succeeding stations based on shelling time. If a relatively long shelling time is observed, system 10 would assume a relatively large sample quantity and perhaps lengthen the time allotted to operation of cleaner 30 .
- the concept of tracking individual sets of seed or samples of seed through system 10 can be used to maintain spatial separation of one set or sample of seed from other seeds.
- One can establish, by empirical testing, a timing regime wherein each set of seed has a certain amount of time in or at each station of system 10 . Because the state of the control gates that control when seed can move in and out of each station is known, controller 12 can keep track of which gates have opened and closed at which part of system 10 for each set or sample, and thus system 10 via controller 12 essentially knows where each seed set or sample is at in system 10 .
- Empirical testing for a given type and/or volume and/or characteristics of seed can reveal how much time is needed in each station for the set of seeds to be completely processed.
- Controller 12 can be programmed to give that amount of time, or perhaps a little more, for its relevant station, before letting the next set of seeds or sample to begin entry into that station.
- system 10 can be programmed in a timing regime in a manner which has shown to allow acceptable processing with clean out for each station until a succeeding sample is allowed to progress into that station.
- the amount of time should be minimized while maintaining sufficient time to ensure reliable completion of processing and clean out.
- spatial separation of plural seed samples progressing through system 10 can be maintained.
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Soil Sciences (AREA)
- Environmental Sciences (AREA)
- Health & Medical Sciences (AREA)
- Physiology (AREA)
- Breeding Of Plants And Reproduction By Means Of Culturing (AREA)
- Adjustment And Processing Of Grains (AREA)
- Pretreatment Of Seeds And Plants (AREA)
Abstract
A method and apparatus for processing seed or seed samples includes an autonomous sorter which sorts seed by pre-programmed criteria. Optional features can include a counter to autonomously ensure the correct number of seeds to a seed package, a cleaning device, a sheller, and a label applicator. A conveyance path, controlled automatically, can move the seed to appropriate and desired stations during the processing while maintaining the sample segregating from other samples. Validation of the sample can be pre-required and information about the sample can be derived and stored for further use.
Description
This application is a Divisional Application of U.S. Ser. No. 10/731,208 filed Dec. 9, 2003, now U.S. Pat. No. 7,290,665, which is a Divisional Application of U.S. Ser. No. 09/776,403 filed Feb. 2, 2001, now U.S. Pat. No. 6,706,989, herein incorporated by reference in its entirety.
A. Field of the Invention
The present invention relates to handling seed, and in particular, to automatic processing of previously harvested seed samples used in plant breeding programs and applications.
B. Problems in the Art
As is well known in the art, corn breeding is an arduous science. The harvesting, handling, and ultimate processing of corn seed samples into packages is an exacting and labor intensive process. Strict standards exist with regard to the same. One important part is the harvesting and handling of breeding seeds. Not only is it crucial to keep track of such things as particular characteristics of the seeds (e.g. genotype, inbred identification, where they were grown); each seed and each seed sample must be carefully handled and evaluated, so that there is a high probability the selected seeds will germinate and so that there is no contamination of the set of seeds comprising the sample of seeds. Only those that meet certain criteria (e.g. undamaged, not diseased, correct characteristics) are used for further breeding activities.
For example, breeding, product development, and product characterization/commercialization processes require the production, evaluation, and use of many samples of corn (Zea Mays). Each sample consists of from one to many ears of corn. Typically, corn plants are grown to maturity in nurseries, and then conditioned and processed in the following separate steps: artificially dried in seed dryers, shelled, the seed cleaned and sized, and then packaged either for replanting or shipment to other locations for yield testing or evaluation for additional breeding crosses. This process must be conducted so that there is no intermingling or cross-contamination of seed samples, and must include a step for removing such things as inert matter, excessively small or large seed, and damaged or diseased seed. This process, from shelling through packaging, is currently substantially manual in nature, and processes samples at the rate of 15-20 samples/person-hour. Each of the steps is usually conducted separately, with non-integrated devices or machinery.
For example, seed samples are conventionally processed as follows. Corn ears are harvested in the field and then placed in plastic mesh bags having some identifying tag. These bags are then dried in dryer bins. When dry, they are manually unloaded and run through a sheller. The shelled seed is then cleaned using any of a number of different methods ranging from cylindrical screens made out of hardware cloth, to flat oscillating screens, or plastic buckets with screen bottoms.
All of these approaches seek to remove small seed and debris. The semi-finished seed is then manually inspected and any damaged or diseased kernels are removed. The seed is then packaged and shipped to other nurseries or counted out into small envelopes in preparation for planting.
All of the seed transfers between pieces of equipment occur by hand, the cleaning operation is performed manually, and the transfer to a package occurs manually. The current manual system requires about 8 people and 8 hours to shell 1000 samples, each containing 8 to 10 ears. If a nursery has to process 4000 samples per day, it will need either 2 shellers operating for two 8 hour shifts with 16 people per shift, or 4 shellers and 32 people to staff the process for one 8 hour shift. It is a significant management challenge to hire, train, and manage 32 part time employees and to make sure that no errors or mistakes occur because of fatigue, operator error, or boredom.
It can therefore be seen that there is a significant need in the art for an improvement in such processing of seed corn. Similar methods are used to process other types of seed samples. It is therefore a principal object of the present invention to provide a seed conditioning process and system which improves over the state of the art. Other objects, features and advantages of the present invention include a conditioning process and system for seed samples which:
-
- (a) provides significant improvement in the time needed to process seeds;
- (b) maintains or exceeds quality of current processing methods;
- (c) reduces labor costs;
- (d) reduces errors or mistakes;
- (e) can be substantially or completely automated;
- (f) is flexible, can be varied according to need, and allows integration of a plurality of seed processing or conditioning functions;
- (g) provides good discrimination between desirable and undesirable seeds;
- (h) allows for accurate tracking and identification during and after processing of the seeds;
- (i) is economical and efficient; and
- (j) is durable;
- (k) allows non-destructive, careful handling of seeds and seed samples;
- (l) allows communication between those that need to use seed samples and the processing of the samples to assist in the efficiency and intelligence of a wider system involving use of the seed samples;
- (m) can include automatic notification or communication of intelligence about the processing and the seed samples to those wanting or needing to know such information;
- (n) allows for automated or machine assisted decisions to assist in efficiency and accuracy of the seed sample processing.
- (o) Is integratable with a number of functions or processes to reduce labor, expense, time and errors in processing seed and seed samples.
These and other objects, features, and advantages of invention will become more apparent with reference to the accompanying specification and claims.
A seed or seed sample handling process and system includes automated handling of previously harvested seeds, by assigning or validating an identifier to a set of seeds, automatically performing one or more operations on the set of seed, and accumulating an end product and storing information about the end product correlated to the identifier. Optionally, the end product can be selected seeds of the set of seeds meeting certain pre-defined criteria. A possible feature of the invention includes validating the identity of a harvested seed sample, tracking the sample through a seed conditioning process, and ensuring its purity and identity as it is packaged. A still further possible feature of the invention includes deriving information about the seed sample during the conditioning process which can be correlated to the sample. As an example, a discrimination device or method can be used to analyze the seeds and discriminate between them or derive a characteristic of the seed, such as moisture. Optionally, the deriving information can be added to a pre-existing knowledge base about the seed from which the sample is taken and conditioned.
The apparatus, system and method can be substantially automated and can condition one batch at a time from start to finish, or condition multiple batches serially. Still further automated functions can be added. The conditioning system and the derived information can be used in a substantially automated system of conditioning seed samples and administrating an inventory of a plurality of seed samples; validating requests for certain seed samples, confirming and maintaining purity and identification of requested samples, and packaging and preparing requested samples for shipment to designated recipients.
A. Overview
For a better understanding of the invention, an embodiment will now be described in detail. Frequent reference will be taken to the drawings. Reference numerals and letters will be used in the drawings to indicate certain parts and locations in the drawings. The same reference numerals or letters will indicate the same parts or locations throughout the drawings unless otherwise indicated.
B. General Environment
The embodiment will be discussed in the general environment of processing seed corn for breeding purposes. The embodiment would preferably be housed in a suitable building, in a controlled environment, preferably shielded from outside environmental conditions.
C. Overall System Apparatus and Information Structure
Ear corn samples from particular field plots are bagged. Bar codes are generated by known methods with identifying information about each sample. The identifying information is correlated to a data base format that can be used in maintaining an overall seed inventory and control system for a plant breeding program.
Instead of discrete manual sample handling and conveyance operations of each sample to process it for further use, system 10 automatically processes or conditions the sample seed.
But additionally, in parallel, system 10 validates each sample, keeps track of each sample, and can gather additional information about the sample. This additional information can be used to update the database about the sample, and can be transferred and used by other systems.
As a result, the objects of the present invention are achieved. Samples are conditioned in less time, with less chance for error, while automatically tracking and gaining additional information and knowledge about the sample.
Gates and doors are operated by electrically controlled pneumatic actuators (solenoid operated) referenced by PN1, PN2, PN3, PN4, PN5, PN6, PN7, PNB, PN9, PN10, PN11, PN12 and PN13. The actuators have two-way ported cylinders, they are actuatable to one of two states by placing higher pressure on one side of the cylinder ram and creating lower pressure on the other side relative to one state or the other. Many of these actuators hold gates or doors in a normally closed state, but when actuated, move a gate or door to an open state to create a pathway for seeds to pass. Several air jets are operated by electrically controlled actuators referenced by AJ1, AJ2, and AJ3. Examples of pneumatic cylinders that could be used are Models 6-DP-1-M, 6-DP-2-M, or 6-DP-3-M from Humphrey Products Company of Kalamazoo, Michigan; or model 2A710 pancake cylinders from Speedaire.
By referring to FIG. 8 , it can be appreciated that controller 12 controls the actuators as follows. Controller 12 communicates with solenoids associated with each actuator by sending an electrical signal which energizes the solenoid. The solenoid energizes its actuator supplying compressed air to a pneumatic cylinder (two-way) that has two states. The compressed air pushes the ram of the air cylinder. This mechanical force is then usable to open and close doors or gates, or open and close pathways for compressed air.
The electrically controlled actuators can have electrical sensors (e.g. Model BIM-PST-AP6X-V1131 inductive sensors from Turck of Minneapolis, Minn) associated with them which inform controller 12 of the state of the actuator. Thus controller 12 can monitor whether a gate or door is open or closed. These sensors are referenced by S1, S2, etc. the sensor references corresponding to the pneumatic actuator references.
Software could time the operation of the various components so that they did not have to continuously operate, even though no ear corn or seed was at the particular station. On the other hand, software could control the components to allow more than one batch of seed to be in process, but in different sections of, system 10 at the same time.
The above-described combination provides intelligence to controller 12 and computer 14 for operation of system 10. System 10 is therefore not only highly automated and autonomous, it is flexible. Safeguards can be programmed into system 10. For example, sensors can inform controller 12 that a certain gate is ajar. The programming can stop processing until the gate is checked. Other checks, error alarms, and monitoring can be built into system 10.
Of course, system 10 must be initialized prior to operation. This includes calibration. For example, cleaner 30 may have to be adjusted for different sizes of seed samples. Color sorter may have to be adjusted for different types of seeds (a color indicating a defect for one type of seed may be the color of health of another seed). Timing can be adjusted for different numbers of seeds per batch. For example, programming can wait for a pre-set time period for a function in one of the stations to be complete. This time period may need to be extended for larger batches of seeds or shortened for smaller batches.
The first station is sheller 28 (see FIG. 1 ). As is well known in the art, sheller 28 receives ear corn as input and mechanically separates the seed from the ear. Bags 16 are brought to sheller 28. A bar code reader 24 is used to read the tag 18 associated with a bag 16 to validate the information that has been encoded in a bar code on tag 18. This validation process, made possible by the pre-existing knowledge base in a data base, essentially authorizes the process of that batch of seed through the processing line.
A conveyance system moves the seed from the output of sheller 28 to the second station, here referred to collectively as cleaner 30. Debris, some damaged seed, and other unwanted material is separated from good seed. Cleaner 30 can be a screen cleaner. Other methods or devices could be used. As indicated at FIG. 1 , a plurality of devices or functions could be included in and/or conducted by cleaner 30. Examples shown include scalping the seed (see 30B) and a preliminary sizing sorting of the seed (see 30C).
A conveyance system would move the batch of seed from the output of cleaner 30 to the third station, referred to generally here as sorter 36. FIG. 1 illustrates a color sorter, such as are known in the art. Sorter 36 functions to select desirable seed. For example, a color sorter attempts to use color or gray scale to discriminate between healthy seeds and diseased or damaged seeds. Some undesired seeds make it through cleaner 30. Sorter 36 attempts to remove them.
A conveyance system then moves the batch of seed to the fourth station, bagger 32, where the seed selected by the sorting system is accumulated and bagged for use.
As shown in FIG. 1 , additional functions can be performed on the batch of seed in the system. Certain characteristics of the seed can be measured. Examples are moisture of the seed (see 36B), temperature of the seed (see 36B where the temperature compensation may be used to determine moisture) and weight of the seed (see 36C). The batch of selected seed can also be counted (see 36E). All of these functions are accomplished autonomously.
The computer can generate labels 22 which can add derived information to the label, here including a bar code. The computer can also generate a label 45 for a box 44. The bar code for box 44 could contain information about which bags of seed samples are in the box, shipping information, and/or other information.
The central database can run as an application on an enterprise-wide network. A database utility takes information and puts it into Microsoft EXCEL files (or comma separated values (CSV) files) into a local Microsoft ACCESS database files, copied from a remote server. A small application communicates with controller 12 and gives information back to controller 12; and lets it process. When through, system 10/controller 12 picks up and sends information and time/date (and sequence #) to computer 14 which can generate a label.
D. Specific System Apparatus and Example of Processing
An exemplary specific seed sample conditioning process, in accordance with the programming of FIGS. 2A-C , will now be described with respect to the specific apparatus shown in FIGS. 6-53 . Steps of the programming of FIGS. 2A-C will be called out while referencing each processing station and/or parts thereof with reference numbers.
The different stations and the devices and methods used at the stations in system 10 can vary. For example, one device may be able to adequately perform the functions accomplished by cleaner 30 and sorter 36 in FIG. 1 . Some seed may not need to be shelled. Counting may not be required, or any evaluation like that which NIR analyzer is capable of.
In the present embodiment, however, related to processing and conditioning of corn seed samples for corn breeding, shelling, some type of cleaning and sorting, and bagging, along with at least moisture, weight, temperature and count measures are preferred.
Below are more specific details regarding components that could be used in system 10 illustrated diagrammatically in FIG. 1 .
1. Preliminary Steps/Bar Code Reader
Electrical power (AC and DC) is presented to the controls in enclosure 50 (see FIGS. 9 & 10 ). Pneumatic pressure is generated by the components illustrated at FIG. 14 (here around 90 psi at 40 CFM minimum).
If the ear corn is not to be shelled and processed, the process to the left of box 58 in FIG. 2A could be followed. The ear corn 19 could pass through or bypass system 10 until bagger 37, where the ear corn 19 could be placed in a new bag(s) 20, the database of computer 14 can be updated, a label can be updated (a new label can be created by label generator 42), and bag(s) 20 closed and loaded into a shipping container 44, which itself could have a label describing its contents, if desired.
A bar code reader or scanner 24 (e.g. Model 5312HP from PSC, Webster, N.Y.) is positioned to read a bar code from a pre-created bar coded tag 18 on ear corn bag 16. The bar code on tag 18 could contain information such as indicated in Table 1.
| TABLE 1 | |||
| Database | Data | ||
| Field | |||
| 1 | Bag #:_______ | ||
| |
Corn Type:_______ | ||
| |
Genotype:_______ | ||
| |
Test Plot #:_______ | ||
| |
Location:_______ | ||
| |
____:_______ | ||
A bag 16 of ear corn (typically comprising 8 to 10 ears) can be manually opened and ear corn 19 poured or loaded into sheller 28.
It should be noted that bar code reader 24 can read information that identifies the contents of bag 16. Computer 14 therefore can store and keep track of the relevant information about the ear corn from bag 16 throughout the processing of system 10. This information can be stored in a memory, text file, or a data base as well as in a database. The term “data base” is to be broadly construed to refer to any set of data regardless of its format, the type of application associated with the data (i.e. spreadsheet, database), the type of storage used to store the data, etc. A local database 47 can be created in computer 14 with such identifying information. Local database 47 can be in contact with a central database 48.
This flow of information on an enterprise wide basis is best shown in FIG. 3B . Information including a shipping location, the year of the seeds, the season of the seeds, the location of the seed plots, a test plot identification number, seed experiment information, whether a particular seed sample is genetically modified, and other user-defined information that may be stored in an enterprise wide database 48 is then used in a local database 47. A database conversion utility may be required, for example the enterprise wide database information may be converted in part to a file of comma separated values or another universal format. A database utility may be required to import the information from a universal format to the format of local database 47. The local database 47 may be a Microsoft Access database and the database utility may be a stand-alone Microsoft Visual Basic application. The seed processing system 10 then adds information to the local database 47 during seed processing, the updated local database 47A containing this additional information. Once the database 47A has been populated with information from the seed processing system 10, the database utility can then be used to extract the database to a comma separated value (csv) file for loading into the enterprise wide database 48.
The database utility creates and uses a Microsoft Access database. As best shown in FIG. 4 , the database is made up of an Entries table, a Box table, and a BoxNumber table. The Entries table contains all of the sample data including the box ID the sample is stored in. The Box table contains all of the information for a box such as shipping weight and sample count. The BoxNumber table is used to build a new box entry in the Box table. The Box ID of the Box table is related to a data field in the Entries table. One field in the Entries table is related to the Box identifier of the BoxNumber table.
Also, when the harvest tag 18 is read by bar code reader 24, identifying information on the bar code is immediately evaluated to ensure this bag of ear corn is authorized to be processed in system 10. This step, called validation, means that the ID of a bag 20 (from label 18) is checked against local database 47, which has downloaded from central database 48 a list of requested samples. For example, the central database can have a complete listing of all corn breeding experiments on-going around the world. The initial validation essentially asks whether the sample ID from tag 18 “exists”, so to speak, in any of the experiments in the central database.
If the ID (identification) does agree, system 10 is authorized to process that sample. If it does not agree, an error is detected. The operator can be notified on display 13 and controller 12 does not allow gate 62 to sheller 28 to be opened.
2. Computer and Controller
The apparatus of system 10 allows an automatic, continuous, real time processing of seed 25, including tracking of a batch of seed that needs to be kept together, or at least precisely identified prior to, during, and after the processing.
By referring to the GUI's of FIGS. 18-25C , it can be seen what types of initialization and set-ups are possible with system 10. FIGS. 18 through 19 show graphical user interfaces of controller 12, while FIGS. 19-25C show graphical user interfaces of PC 14. FIG. 18 shows the relationship of a number of different screens that may be accessed from a product selection screen (see also FIG. 19A ). These screens include a weight calibration screen, a moisture calibration screen, a run screen, a settings screen (see also FIG. 19C ), a manual control screen (see also FIG. 19B ), a color sorter testing screen, and a seed counter testing screen. Examples of timing between stations and set-ups for corn are given in the settings screen of FIG. 19C . Examples of the types of operator over-rides are given in the manual operator screen of FIG. 19B . Examples of the database fields and how they are used to create bag and box labels are shown.
3. Automated Processing Stations
a. Sheller
If ear corn 19 is desired (and validated) to be shelled and processed further, the steps in the flow chart after box 56 could be followed. FIG. 2A illustrates at step 60 and step 62 if a decision is made to ship the ear corn, the seed can be aspirated and accumulated or controlled as to rate of presentation to the next station. System 10 can check if it is free or allowed to proceed to the next process step (step 64). System 10 could instruct a kernel clean process (see step 66). Aspiration could be integrated into sheller 28.
Sheller 28 (e.g. Model ECS by Almaco, Nevada, Iowa) functions to shell ear corn 19. A variety of shellers are commercially available. Once a seed sample in a bag 16 is validated (after bar code 18 is scanned and computer 14 validates), the ear corn from that bag 16 are loaded into a hopper in sheller 28.
Non-seed (e.g. cob, stalk, leaves) can be discharged (see reference letter D, FIG. 1 ) via a chute or conveyor to be discarded or otherwise used.
Line vac LV1 (e.g. model 6063, from Exair, Cincinnati, Ohio) is activated by controller 12. It is driven by solenoid controlled compressed air and causes the shelled corn to be pulled from the outlet of sheller 28 into air tube 60 and is conveyed first horizontally then vertically to cyclone 71 at the top of cleaner station 30. Pressurized air is delivered from the source (FIG. 14 ) via ½″ O.D. polyethylene tubing and used by the 1½″ I.D. inlet and outlet air vac.
All air tubes in system 10 are clear PVC food grade tubing, with reinforcing spiral to maintain roundness (size is approx. 1¾″ O.D., 1½″ I.D., available from McMaster-Carr of Ill.). Such tubing is flexible. This makes it easy to install and allows the operator to visually inspect the lines.
An aspirator 32 optionally could be placed at the outlet of sheller 28 or integrated into sheller 28 to aspirate the seed as it is leaves sheller 28. This could assist in removing dirt, debris, or otherwise pre-clean the seeds.
b. Cleaner
It again should be noted that in many of these steps along the process, undesired seed (e.g. damaged) can be automatically discarded from the processing path but accumulated (step 72, FIG. 2B ). If it is determined, for example by manual inspection by a worker, that desirable seed is in the bagged discard seed, it can be recovered and manually inserted in an appropriate “clean” seed bag, e.g., if additional seed is required to meet a desired minimum seed count for the sample (step 74).
General cleaner terminology: The cleaner 30 separates desirable seed based upon size and/or shape. Cleaner 30 consists of two perforated metal screens, each paired with an underlying pan. Top screen 260A has perforations with the diameter of 26/62″ and is referred to as the scalping screen. Lower screen 260B has holes with the diameter of 18/64″ and is referred to as the sieving screen. The scalping screen's holes are sized such that desirable seed pass through its holes onto its associated pan 262A. The sieving screen's holes are sized such that broken seed or undesirably small seed pass through its holes onto the sieving screen's pan 262B.
Cleaner seed flow: Seed flows from sheller 28 into cleaner feeder bucket 72. When controller 12 has determined that cleaner 30 is ready to receive seed, it opens an associated solenoid valve to energize the two-stage pneumatic actuator PN4/5. The first stage of actuator PN4/5 opens cleaner feeder bucket door 74 to 1″. This limited opening allows seed to flow onto scalping screen 260A at a controlled and desirable rate.
Desirable or “clean” seed flow: The desirable seed flows through scalping screen 260A onto pan 262A and then falls from the lower end of pan 262A onto lower or sieving screen 260B. The desirable seed then flows off screen 260B and exits the cleaner at 266B.
Discard or “dirty” seed flow: Seed that is too large to pass through scalping screen 260A slides across the scalping screen 260A onto lower pan 262B associated with the sieving screen 260B. This large seed or debris exits the cleaner at 268B. Seed that is too small is separated from the desirable seed by falling through sieving screen 260B onto sieving screen pan 262B and exits cleaner 30 comingled with large seed and debris using 268B.
Cleaner clean-out cycle: Cleaner 30 and its associated systems have been optimized to avoid the cross-contamination of seed samples. The first point in the clean-out cycle is for the second stage of the two-stage pneumatic actuator PN4/5 on cleaner feeder bucket 72 to open door 74 completely. This allows any large debris that might potentially plug the bucket's opening to slide onto cleaner 30. The duration of the opening of each of the two stages is controlled by controller 12 and is optimized for the products or sample sizes being run. If the bucket is not emptied of debris and seed, it might jam and then allow seed from the next sample to leak onto cleaner 30 prior to the removal of the previous sample.
Scalping screen 260A is the first screen to receive seed in cleaner 30. The seed sample from cleaner feeder bucket 72 quickly flows over or through the scalping screen 260A. Before scalping screen 260A can go through a clean-out cycle, all seed must be removed from its pan 262A. Cleaner 30 has air jets AJ1 and AJ2 that blow across the sieving screen 260B and its associated pan 262B. Air jets AJ1 and AJ2 are directed at an angle such that all seed or debris are propelled off sieving screen 260B and pan 262B prior to the cleanout cycle. Once pan 262A is clean, the pneumatic cylinder or actuator 288A (PN3) extends and moves pan 262A upwards so that it strikes the bottom of scalping screen 260A dislodging any seed or debris stuck in scalping screen 260A. This cycle is repeated quickly at least twice to dislodge and rapidly move seed off scalping screen 260A. The length of time allowed for each portion of the seed sample cleaning process and then for the clean-out process is optimized for different materials and sample sizes and is under the control of controller 12. Contaminating seed is not sensed by system 10, but in the future it might be possible for system 10 to know whether seed has finished moving through the system and whether or not contaminating seed or material remains.
It is to be understood that device 30 could have controller-controlled automated equipment to perform any of the functions of cleaning the seed, scalping the seed, or sorting the seed by sieve or other method. FIG. 1 illustrates three such functions. Cleaner 30 can be any device which separates seed 25 from non-seed. Non-seed material can be directed to a discharge D.
Cleaner/scalper/sieve 30 can be either one device or a combination of devices. Appropriate internal or external mechanized controller-controlled or gravity-based conveying devices 29 transport seed 25 between functions.
Thus, cleaner 30 is essentially a seed sizer. As is well-known, this could be on the basis of size or shape (e.g. flat versus cylindrical) or both.
Importantly, cleaner 30 is self-cleaning. In many screen cleaners, some seeds and debris get caught in the openings of the screen. After each cleaning, scalping, sieving, or sorting process, remaining seeds and debris on the screen must be manually removed. System 10 provides for automatic self-cleaning by continuously running shaker table 75, which continuously urges anything on the screens to move, and by moving one of the cleaner screen and a plate against one another to dislodge anything stuck in the screen openings.
It is important to clean cleaner 30 after each cycle, not only to remove debris for optimal sorting by cleaner 30, but also to remove any seeds. If seeds are left, they may contaminate the next sample that is processed. For example, one does not want to have a genetically modified seed from one sample inadvertently in a non-genetically modified sample.
Thus, the two stage feed rate deters overwhelming of cleaner 30 and the self-cleaning aspects deter contamination of samples.
By referring also to FIG. 35 , it can be seen that with respect to upper screen 260A and cleaner 262A, an elongated rod 272A is connected via pins 274A and 276A to pan 262A through the side walls of housing 270 via arcuate slots 278A and 280A. A first link 282A is connected at one end to pin 274A and a second end to pin 287A which travels in arcuate slot 286A. Link 282A is pivotally fixed to the side of housing 270 at both 284A.
A second link 275A is connected at one end to pin 276A and is pivotally fixed to the side of housing 278 by bolt 292A.
An actuator 288A is mounted to an interior end wall of housing 270 at mounting plate 290 and at an opposite end has an extendable arm 290A connected to pin 287A at a generally intermediate position. As shown by comparing FIGS. 33 and 34 , when end 290A of actuator 288A is retracted, pin 262A is in a lowered position. When end 290A of actuator 288A is extended, links 282A and 275A are pivoted to opposite positions relative to arcuate openings 278A, 286A, and 276A and pan 262A is brought up against the bottom of screen 260A to perform a cleaning function.
As with prior described embodiments, this action can occur while the entire device is oscillating or gyrating (at 200 rpm), or such movement can be stopped during the cleaning process. It has been found that two quickly repeated movements of pan 262A against screen 260A is preferable to one such movement as it creates some vibration to assist in dislodging material from the openings in screen 260A.
Cleaning of lower screen 260B is essentially the same as described with regard to screen 260A, except that screen 260B is moved down onto pan 262B. As shown in FIG. 33 , the components are essentially the same although their configuration and orientation differs as shown. The embodiment of FIGS. 33-35 allow sorting to occur at two succeeding levels. Seeds are output at outlet 266B and 268B respectively for use or further conditioning.
With all embodiments, the cleaner would perform cleaning on individual screens either through self motorization or by utilizing the movement of each screen itself. Therefore, the embodiments do not require any complicated attachment to a single drive force even if there were multiple screens involved. Variations obvious to one skilled in the art will be defined by the claims. For example, the embodiments can be utilized for a wide variety of screen sizes. The embodiment of FIGS. 26-36 is believed to be better for smaller sized screens. Cleaner 30 is connected to controller 12 which controls the pneumatic actuators for cylinders PN2 and 3 and air jets AJ1 and AJ2 for the self-cleaning process.
Normally about 5%-10% of the sample is discharged as “dirty”, mostly comprising broken seeds or foreign material. Thus a substantial majority of the sample is passed as “clean” or selected product.
Note that a perforated section 108 of tube 100 (see FIG. 27 ) could be used below bucket 80. This 4″-5″ section could be made of galvanized metal, 1½″ I.D., 14 gauge, with several hundred 3/32″ offset holes 109. This would assist the movement of seeds through the respective air tube, especially where relatively large volumes of seed accumulate, for example, possibly at the cleaner bucket and at the color sorter bucket for good product. It allows easier air movement into the conveyance tube to transport the seed sample to its next destination. Otherwise, the use of air-tight tubes and gates may not provide sufficient volume and velocity of air to fluidize the seed. Perforated sections like section 108 could be used at other parts of system 10, particularly where relatively large amounts of seed need to be conveyed.
c. Color Sorter
Once processed to step 72 (see flow chart of FIG. 2 ), the seed is accumulated (step 74) and a kernel clean process is instructed by controller 12 (steps 76 and 78). This self-cleaning could include operation of an air jet AJ3 to rid color sorter 36 of any seeds that might be lodged or otherwise remain in color sorter 36. Active cleaning of color sorter 36 is accomplished by an air jet AJ3 at the funnel 103 and chute 104 (see FIGS. 37B and 40 ).
Non-destructive evaluation and/or automated counting (step 82) can take place. Non-destructive evaluation can include, for example, the types of sensing previously described; e.g. measurement of moisture, weight, oil content, etc. Database (see step 84, FIG. 2B ) in a computer system can instruct the process regarding the type and amount of seed that is desired (step 86). The system can compare the actual count (step 82) to the requested seed count (step 88) as well as check whether moisture or other characteristics is/are acceptable (step 90). For example, NIR analyzer 36D of FIG. 1 could be used to select only high oil content seed 25 based on NIR sensing and sorting similar to the color sorting shown in FIG. 3 .
Air transport 100 (FIG. 37B ) is another pneumatic conveyor, with a tube operatively connected to a controller-controlled pressurized air source 34 that can lift seeds 25 vertically.
Cleaned seeds are lifted to color sorter cyclone 101 and drop by gravity into color sorter feeder bucket 102. Upon instruction of controller 12, color sorter feeder bucket actuator PN8 opens hinged door 110 (FIG. 40 ) which opens a pathway for the seeds to fall into sorter feeder funnel 103, and then into color sorter seed chute 104.
The basic principles of operation of a color sorter are illustrated at FIG. 38 . A conveying mechanism 348, controlled by a controller-controlled actuator 350, receives incoming seeds 25 from source 333. The plurality of seeds 25 are presented serially and at generally uniform velocity along some type of conveyor 348 or path (see seeds 25A-H in FIG. 38 ). Color sorter 36 (FIGS. 37A-C ) directs seeds from feeder 102 into a plurality of generally parallel paths or channels, so that sorting of each channel can occur simultaneously for greater throughput. In comparison, FIG. 38 shows just one path or channel for simplicity of illustration. Color sorter 36 (FIGS. 37A-C ) also uses gravity to convey the seeds through the channels, see seed funnel 103 and ramp 104 in FIGS. 37C and 40 . Once the channels are formed, seeds actually fall in free space for a time. The structure of color sorter 36 encourages a seed trajectory of a consistent speed. Color sorter 36 is set up to handle on the order of 200 seeds per channel per second. Funnel 103 concentrates the seeds accumulated in feeder bucket 102 into four principal channels, although the ScanMaster accommodates 10 channels This is because it is believed a steady flow gives better results than an intermittent flow. This results in a throughput on the order of 800 seeds per second. For typical approximately 2000 seed samples, one sample can be color sorted in approximately 5 seconds. This represents a very substantial savings in time over manual inspection of 2000 seeds.
Referring back to FIG. 38 for illustration purposes, a light source 354 of substantial intensity illuminates the seeds. A digital video imaging device 358 captures images of the illuminated seeds. A light bar control 356 and video processor/controller 360 are operatively connected to devices 354 and 358 to illuminate and digitally scan seeds 25 as they serially pass thereunder. The video scans are evaluated by processor 360 (and computer 14) against predetermined criteria based on visual characteristics of seed 25. For example, diseased portions of harvested corn seed is usually darker in color than that non-diseased seed. By appropriate calibration, seed 25 can be visually discriminated by comparison to adjustable color or darkness/lightness thresholds programmed into the system.
In color sorter 36 (FIGS. 37A-C ), two sides of the seeds can be illuminated as they fall in free space (two light sources are used, one above and one below the channels of falling seed). Two CCD imagers, one above and one below the channels, can be used to examine two sides of the seeds to more completely check for undesired seeds.
Referring back to FIG. 38 for illustration purposes, a controller-controlled deflecting ejector 366 is positioned downstream of imaging device 358. By coordination with imaging device 358, a ejection actuator 368 can operate ejector 366 to cause identified non-desired seed 25 to be physically deflected from conveyor 348 (see arrow 364 relative to seed 25D in FIG. 38 ). It is calibrated to take into account the time between detection of a bad seed and the time to fire the ejector based on known velocity of the seeds. Ejector 366 could be an air jet (one per channel) and ejection actuator 368 a source of pressurized air. The dwell time of the air jets would be adjustable. More dwell time would increase the probability of propelling a seed designated for discard out of the falling stream of seeds, but also risks ejecting seeds that are not designated to be ejected. Adjustments can be made based on empirical testing.
Alternatively, ejector 366 could be a pneumatic, hydraulic or electro-mechanically actuated arm or finger that would physically knock or push a ejected seed 25 from conveyor 348, as controlled by actuator 368.
It is to be understood that color sorter 36A could take on many configurations. Color sorter 36 of FIGS. 37A-C and 39-45 uses gravity and seed chutes to send seeds moving down separate parallel paths and then into a free fall in those aligned paths. Light bars on both sides of the dropping seeds illuminate two sides of the sides. The CCD imager line scans and compares its pixel values to thresholds. Software recognizes what is probably a seed versus air. If a programmed threshold is exceeded, color sorter identifies which seed, and knowing its approximate velocity, operates an air jet (AJ3) at the appropriate time to deflect an undesired seed to discard. Other configurations and methodologies could also be used.
Selected (non-ejected) seeds fall into color sorter bucket 106 (FIGS. 37C and 41 ). As shown in FIG. 37A , 37C, and 41, before they reach bucket 106 the seeds pass through counter 105. Counter 105 is a granular media sensor model GMC from Jacobson-Holtz Engineering, Perry, Iowa. It can provide controller 12 (via a mV signal) a reasonably accurate count (approx. +/−10%) of the number of seeds passing by. It provides count information for the batch being processed. The count is accurate enough to tell if there is enough seed in the processed sample to ship to meet a request. As a default, system 10 requires a minimum 500 seed threshold.
A variety of such counters are available off the shelve. One example measures the dielectric constant of a gap between two sensing electrodes. Depending on the presence and amount of seed between the electrodes, a dielectric constant is sensed compared to when no seed is in the gap. When some seed is detected, it is considered an “event”. The change of dielectric constant can be calibrated based on the number of seeds by assigning a number of pulses to the sensed dielectric constant, and thus a total seed count for different samples can be derived automatically and quickly by comparing the number of pulses to the calibration. Photo-optical counters are another example.
Discard or “dirty” (ejected) seed separated by color sorter 36 fall into a “dirty” seed funnel 112. The position of swap valve 113 (FIGS. 41-44 ) determines if this collected “dirty” seed is sent via pneumatic transport tube 120 and line vac LV5 to trash cyclone 121 (see FIG. 15 ), or via transport tube 118 to bagging station 37. Swap valve actuator PN11 operates a slide plate 114 which has two openings 115A and B from which two tubular connectors extend, to which are attached air transport tubes 120 and 118. In a trash cyclone position, plate 114 is slid to a position that allows discard seed access to transport tube 120. In a bagging position, plate 114 is slid to a position that allows the discard seed into transport tube 118. This is selectable by the operator and under control of controller 12. One opening 118 in fixed plate 119 is in fluid communication with line vac LV5. Slide plate 114 is slidable by actuator PN11 to either align its opening 115A or 115B with opening 118 in fixed plate 119.
Note also that a diverter valve 116 is positioned just ahead of (upstream of) counter 105. Diverter valve actuator PN9 can be operated by controller 12 to block the pathway of “good” (non-ejected) seed from color sorter 36 and instead direct such seed into diverter drop tube 117, where it will fall into dirty seed funnel 112. This can occur if counter 115 indicates a seed count threshold has been exceeded. Such diverted, but otherwise “good” (not “dirty”) seed will be handled with the discard or “dirty” seeds as previously described.
A slide gate 107 at the bottom of color sorter bucket 106 is controlled by actuator PN10 (under controller control) when controller 12 authorizes bucket 106 to be dumped. See FIGS. 37A , 37C, and 39.
Other characteristics of a seed 25 could also be remotely, non-destructively obtained in real time under controller control as the seed 25 is being conveyed in system 10. As shown in FIG. 1 , a near infrared spectroscopy device 36D could be used not only to measure moisture, but a variety of other characteristics. See U.S. Pat. No. 5,991,025, to Wright, et al., incorporated by reference herein. Other examples are nuclear magnetic resonance (NMR), and Raman spectroscopy. Examples of characteristics that can be non-destructively sensed in essentially real time include but are not limited to oil content, protein content, moisture, color chemical properties, genetic make-up, width, length.
e. Bagger/Labeler
If the answer to boxes 88 or 90 of the program of FIG. 2 is “no”, the process (FIG. 2B ) loops to provide the seed count and determines moisture level (step 92) prior to automatically filling a bag (step 94) with the processed seed of desired characteristics. 55
Seed sample weight can be obtained (see device 36C in FIG. 1 ). Load cells 123 (Model RL1010, 15 Kg load cell, 2 mV/V, with 4 channel summing box 4LC100-SEE from Rice Lake Weighing Systems, Rice Lake, Wis.) support bucket 122 on the framework of bagger station 37. Load experienced by load cells 123 is translated into weight of the seed (weight of bucket 122 is subtracted) and is read by controller 12.
Moisture content is be measured by a controller-controlled device 124. A variety of methods could be used to obtain such a measurement remotely and non-destructively in essentially real time. One example is a photo-acoustic method, such as is well known. Another example is use of near infrared (NIR) spectroscopy, such as shown and described in co-owned issued U.S. Pat. No. 5,991,025 to Wright, et al.
Moisture probe 124 (FIG. 49 ) is a capacitive moisture probe, such as is known in the art and mounts through the back of bucket 122, extending into its interior so that it can extend into the seed that accumulates there. An interior bucket (see reference numeral 129 in FIG. 50 ) fills up first to get uniform volumes of seed from measurement to measurement. After interior bucket 129 is filled, additional seed spills out into bucket 122. Other such methods are possible.
By monitoring moisture of each sample accumulated at bagging station 37, system 10 can alert the operator on controller display 13 if a sample is too wet (e.g. above 13½% water by weight). If the moisture threshold is exceeded, the operator could remove the sample and dry it to an acceptable moisture level before packaging it for shipment.
Several different sized bag holders 127 are mounted to bagging station 37 under funnel 126, to accommodate different sized bags, as shown.
Bagging station 37 also can bag seed or materials not selected in the processing cycle of system 10, the “dirty” material. Such material can be conveyed from other parts of system 10 pneumatically to dirty bagging cyclone 121 where it would accumulate in dirty bagging bucket 132. It can either be selectively pneumatically conveyed to another location (such as a dirty product dump 133—see FIG. 15 ) or actuator PN13 can be operated by controller 12 to open a bottom door 134 (FIG. 53 ) in bucket 132, and the dirty product would fall by gravity into dirty product funnel 135 and into a bag mounted to dirty product bag holder 136.
Also, it is possible to configure system 10 to add in one or more additional stations or functions prior to bagging of samples. As discussed earlier, for example, another air transport could be added to convey a sample to a non-destructive evaluator like disclosed in Wright et al. U.S. Pat. No. 5,991,025, or for other processing or measurements.
As shown in FIGS. 1 and 6 , a label printer 42 (e.g. Model 105SE from Zebra, Vernon Hills, Ill.), controlled by PC 14, could print and apply a bar-coded label with desired information to bag 20A.
The information on label 22, and a corresponding database, could be in the form of Table 2.
| TABLE 2 |
| Entries Table |
| Database | Data | ||
| Field | |||
| 1 | search barcode:_______ | ||
| |
weight:_______ | ||
| |
moisture:_______ | ||
| |
seed count:_______ | ||
| |
sample too wet:_______ | ||
| |
box ID:_______ | ||
| |
shell time & date:_______ | ||
| |
duplicate sample:_______ | ||
| |
duplicate | ||
| Field | |||
| 10 | dirty bag saved | ||
| |
| ||
| Field | |||
| 12 | <user defined> (as many fields as needed) | ||
| | Field | 1 | | |
| Field | ||||
| 2 | | |||
| Field | ||||
| 3 | | |||
| Field | ||||
| 4 | | |||
| Field | ||||
| 5 | date shipped | |||
| |
<user defined> | |||
Other information, of course, can be contained in such database tables, including specific test plot identification and location, seed inventory number(s), experiment number(s), etc.
Label could be part bar code and part human readable. For example, it could contain special information such as warnings, that would be human readable. One example is that it could explicitly state that the contents of the package contain genetically modified seeds, which have to be handled carefully.
Labels for bags of “good” product and “dirty” product could differ.
Software of system 10 thus creates a label for each validated sample that arrives at and is ready for bagging. Printer 42 can also create a box label 45 for box, which would essentially be a packing label for box 44, listing by some identification, everything to be placed in box 44. Also, because weight of each sample is known (along with weight of the empty bags), system 10 can accumulate total weight for multiple packaged samples and alert the operator when a total weight threshold is reached (for example, certain air freight or overnight air express companies have a maximum weight limit per box (e.g. 70 lbs.).
As shown in the Figures, and described herein, system 10 presents a combination of apparatus that can receive ear corn 19, automatically process it, and discharge it into bags 20. Within system 10, components autonomously move the ear corn or seed corn from station to station. Additionally, system 10 instructs each station and the conveying components to perform their respective operations.
Overall, samples with approximately 2000 corn seeds take on the order of 40 seconds per sample through system 10.
Additionally, as illustrated at FIG. 1 , one or more automatic message can be generated and sent (e.g. via an email server such as are known) by system 10 after processing of a sample. For example, PC 14 could use an application such as Microsoft Outlook and its MAPI function to automatically send emails to a designated person(s) notifying them of the date a certain sample had been processed and its count. Such persons thus are notified what to expect. The designated persons could be a key contact for the experiment, a customer/client of the plant breeder, or in-house personnel. System 10 can evaluate whether the sample meets a request from the central database. Other information or uses of the information about samples in system 10 of course are possible. Automatic facsimile, paging, or other notifications are possible.
F. Option, Alternatives, and Features
The included preferred embodiment is given by way of example only and not by way of limitation to the invention which is solely described by the claims herein. Variations obvious to one skill in the art will be included within the invention defined by the claims.
For example, system 10 could be configured to provide just one or just a couple of functions. Use of color sorting alone will decrease labor and increase throughput. Use of an NIR spectrometry alone as a discriminator, would allow quick and accurate sorting based on, for example, high oil content.
Or, some functions could be eliminated or combined. For example, sometimes the cleaning function may not be necessary. By way of another example, cleaning and color sorting might be combined in one station.
For example, with soybeans, no shelling is needed. With soybeans, a thresher is used instead of a sheller. The thresher used to receive plants and then separate the grain or seed from the straw. Cleaning could be performed with a spiral separator. Sorting might be done with an NMR device discriminating seeds based on oil content. Selected seeds could be placed into wells on trays instead of into bags.
The ability to automate all or part of the process can be combined with the automated labeling and bar code scanning processes to keep control of inventory and shipping.
Alternatives to bar codes on tags or labels could possibly be used. One example is radio frequency (rf) identification or tags, such as are commercially available. Any type of digitizable ID that can be machine read may be possible.
Alternative conveyors could be used. Examples might include bucket conveyors or augers. Others are possible.
Optionally, sensors could be used at locations throughout system 10 to detect the presence of a sample and be used by controller 12 to process each sample, as opposed to using primarily timing to control conveyance and operations of each station on a sample.
The concept of tracking individual sets of seed or samples of seed through system 10 can be used to maintain spatial separation of one set or sample of seed from other seeds. One can establish, by empirical testing, a timing regime wherein each set of seed has a certain amount of time in or at each station of system 10. Because the state of the control gates that control when seed can move in and out of each station is known, controller 12 can keep track of which gates have opened and closed at which part of system 10 for each set or sample, and thus system 10 via controller 12 essentially knows where each seed set or sample is at in system 10. Empirical testing for a given type and/or volume and/or characteristics of seed can reveal how much time is needed in each station for the set of seeds to be completely processed. Controller 12 can be programmed to give that amount of time, or perhaps a little more, for its relevant station, before letting the next set of seeds or sample to begin entry into that station. Thus, system 10 can be programmed in a timing regime in a manner which has shown to allow acceptable processing with clean out for each station until a succeeding sample is allowed to progress into that station. The amount of time should be minimized while maintaining sufficient time to ensure reliable completion of processing and clean out. Thus, even without position sensors, spatial separation of plural seed samples progressing through system 10 can be maintained.
Claims (72)
1. A method for processing seed derived from an experimental plot comprising:
(a) correlating a seed sample to a plot;
(b) assigning or accepting correlation information for said seed sample;
(c) performing operations on the seed sample;
(d) accumulating at least some seed of the seed sample;
(e) non-destructively deriving/measuring one or more characteristics of the accumulated seed, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed comprises determining genetic make-up;
(f) storing a derived/measured characteristic; and
(g) collecting the accumulated seed for further use.
2. The method of claim 1 wherein the seed is corn seed.
3. The method of claim 2 wherein the seed is originally attached to its carrier comprising a cob.
4. The method of claim 1 wherein the seed is soybean seed.
5. The method of claim 4 wherein the soybean seed is originally attached to its carrier comprising a soybean plant or part thereof.
6. The method of claim 1 wherein the processing is in association with a plant breeding experiment.
7. The method of claim 1 wherein the correlation step comprises associating a machine-readable tag with one or more carrier, vegetation, tissue or structure containing said seed sample; machine-reading the tag; and validating information on the tag to a data base related to the experiment.
8. The method of claim 1 wherein the operations comprise at least one of the following: (a) separating the seed from a carrier, (b) cleaning the seed, (c) sorting the seed based on size, and (d) sorting the seed based on other than size; and the step of deriving/measuring relates to further comprises at least of one of: (i) weight, (ii) moisture content; (iii) number of seeds seed; (iv) constituents of the seeds seed, and (v) temperature of the seeds seed.
9. The method of claim 1 further comprising communicating to one or more databases, information related to said seeds seed, said operations, and/or said deriving/measuring.
10. The method of claim 9 further comprising generating a label that can be associated with the collected accumulated seed based on an updated data base.
11. The method of claim 1 further comprising generating a communication related to the accumulated seed for transmission to a predetermined addressee.
12. The method of claim 11 wherein the communication comprises one or more of (a) identification of accumulated seed, (b) time/date of harvest of the seed sample, and (c) time/date of performance of said operations on the seed sample.
13. The method of claim 1 further comprising simultaneously processing a plurality of seed samples.
14. The method of claim 13 further comprising controlling movement of and operations on said seed sample to maintain separation of seed from one sample of seed from other samples.
15. The method of claim 14 wherein separation is achieved by disallowing any seed for one sample to move to a location occupied by seed from another sample.
16. The method of claim 14 wherein separation is achieved by sequencing operations so that an operation on a succeeding seed sample can not begin until that operation on an immediately preceding seed sample is deemed completed.
17. The method of claim 1 further comprising the operation of sizing seeds seed by a self-cleaning perforated sizing screen comprising: moving one of a surface and a sizing screen towards the other.
18. The method of claim 1 wherein the correlation information is compared to a data set.
19. The method of claim 17 further comprising directing pressurized air towards the screen or surface.
20. A method for processing seed derived from an experimental plot comprising:
correlating a seed sample to a plot;
assigning or accepting correlation information for said seed sample;
accumulating at least some seed of the seed sample;
non-destructively deriving/measuring one or more characteristics of the accumulated seed, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed comprises determining genetic make-up;
storing a derived/measured characteristic; and
collecting the accumulated seed for further use.
21. The method of claim 1, wherein the step of performing operations on the seed sample comprises shelling the seed sample.
22. The method of claim 1, wherein assigning or accepting correlation information for said seed comprises reading a machine-readable label.
23. The method of claim 22, wherein the machine-readable label is associated with the seed sample.
24. The method of claim 1, further comprising:
tracking seed in the seed sample during processing using the assigned or correlated information for the seed sample.
25. The method of claim 24, wherein the assigned or correlated information comprises an identification string assigned to each seed.
26. The method of claim 24, wherein the assigned or correlated information comprises user-defined information to track seed in the seed sample.
27. The method of claim 24, wherein the tracking is automatic.
28. The method of claim 24, wherein the tracking is automated.
29. The method of claim 24, wherein the tracking is autonomous.
30. The method of claim 24, wherein locations for seed in the seed sample are known during processing based on the tracking.
31. The method of claim 1, wherein performing said operations on the seed sample comprises reading a machine-readable label to ascertain additional information about the seed sample.
32. The method of claim 31, further comprising:
tracking seed in the seed sample during processing using the additional information about the seed sample.
33. The method of claim 32, wherein the additional information comprises an identification string assigned to each seed.
34. The method of claim 32, wherein the assigned or correlated information comprises user-defined information to track seed in the seed sample.
35. The method of claim 32, wherein the tracking is automatic.
36. The method of claim 32, wherein the tracking is automated.
37. The method of claim 32, wherein the tracking is autonomous.
38. The method of claim 32, wherein locations for seed in the seed sample are known during processing based on said tracking.
39. The method of claim 1, wherein performing said operations on the seed sample comprises capturing a visual characteristic of seed in the seed sample.
40. The method of claim 39, wherein capturing a visual characteristic of seed in the seed sample is automatic.
41. The method of claim 39, wherein capturing a visual characteristic of seed in the seed sample is automated.
42. The method of claim 39, wherein capturing a visual characteristic of seed in the seed sample is autonomous.
43. The method of claim 39, wherein capturing a visual characteristic of seed comprises capturing images of seed in the seed sample.
44. The method of claim 39, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is based on the captured visual characteristic of seed in the seed sample.
45. The method of claim 43, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is based on the captured images of seed in the seed sample.
46. The method of claim 1, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is automatic.
47. The method of claim 1, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is automated.
48. The method of claim 1, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is autonomous.
49. The method of claim 32, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is automatic.
50. The method of claim 32, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is automated.
51. The method of claim 32, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is autonomous.
52. The method of claim 35, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is automatic.
53. The method of claim 35, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is automated.
54. The method of claim 35, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is autonomous.
55. The method of claim 39, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is automatic.
56. The method of claim 39, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is automated.
57. The method of claim 39, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is autonomous.
58. The method of claim 43, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is automatic.
59. The method of claim 43, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is automated.
60. The method of claim 43, wherein said non-destructively deriving/measuring one or more characteristics of the accumulated seed is autonomous.
61. The method of claim 1, wherein said collecting the accumulated seed for further use comprises sorting seed based on one or more derived/measured characteristics.
62. The method of claim 1, wherein said collecting the accumulated seed for further use comprises sorting seed based on one or more derived/measured characteristics using at least the assigned or correlated information for the seed sample.
63. The method of claim 24, wherein said collecting the accumulated seed for further use comprises sorting seed based on the derived/measured characteristic using at least the assigned or correlated information for the seed sample.
64. The method of claim 31, wherein said collecting the accumulated seed for further use comprises sorting seed based on the derived/measured characteristic using at least the additional information.
65. A method for processing corn seed derived from an experimental plot comprising:
harvesting at least one corn ear in a field plot;
mechanically separating corn seed from the at least one corn ear using a sheller to generate a seed sample;
correlating the seed sample to the field plot;
generating a bar code with identifying information about the seed sample, the identifying information being usable in a seed breeding program;
accumulating at least some seed from the seed sample;
non-destructively and individually evaluating each seed of the accumulated seed;
storing a derived/measured characteristic of the accumulated seed based on the non-destructive evaluation, the derived/measured characteristic being correlated with the identifying information about the seed sample; and
collecting the accumulated seed for further use.
66. The method of claim 65, wherein the derived/measured characteristic determined in the non-destructive evaluation comprises genetic make-up of the seed.
67. The method of claim 65, wherein the non-destructive evaluation employs a near-infrared analyzer.
68. The method of claim 65, wherein the non-destructive evaluation employs a photo-acoustic method.
69. A method for processing corn seed derived from an experimental plot comprising:
harvesting at least one corn ear in a field plot;
mechanically separating corn seed from the at least one corn ear using a sheller to generate a seed sample;
correlating the seed sample to the field plot;
generating a bar code with identifying information about the seed sample, the identifying information being usable in a seed breeding program;
accumulating at least some seed from the seed sample;
non-destructively and individually evaluating each seed of the accumulated seed to determine one or more characteristics thereof, the one or more characteristics comprising at least a genetic make-up of the accumulated seed;
storing the one or more characteristics of the accumulated seed, the one or more characteristics being correlated with the identifying information about the seed sample; and
collecting the accumulated seed for further use.
70. A method for processing seed derived from an experimental plot comprising:
generating a seed sample of seed taken from a plant grown in a field plot;
correlating the seed sample to the field plot;
generating a machine readable identifier with identifying information about the seed sample, the identifying information being usable in a seed breeding program;
accumulating at least some seed from the seed sample;
non-destructively and individually evaluating each seed of the accumulated seed to determine one or more characteristics thereof, the one or more characteristics comprising at least a genetic make-up of the accumulated seed;
storing the one or more characteristics of the accumulated seed, the one or more characteristics being correlated with the identifying information about the seed sample; and
collecting the accumulated seed for further use.
71. The method of claim 70, wherein the seed is corn seed.
72. The method of claim 70, wherein the seed is soybean seed.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/733,544 USRE45489E1 (en) | 2001-02-02 | 2013-01-03 | Automated high-throughput seed sample handling system and method |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/776,403 US6706989B2 (en) | 2001-02-02 | 2001-02-02 | Automated high-throughput seed sample processing system and method |
| US10/731,208 US7290665B2 (en) | 2001-02-02 | 2003-12-09 | Automated high-throughput seed sample handling system and method |
| US11/860,055 US7905050B2 (en) | 2001-02-02 | 2007-09-24 | Automated high-throughput seed sample handling system and method |
| US13/733,544 USRE45489E1 (en) | 2001-02-02 | 2013-01-03 | Automated high-throughput seed sample handling system and method |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US11/860,055 Reissue US7905050B2 (en) | 2001-02-02 | 2007-09-24 | Automated high-throughput seed sample handling system and method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| USRE45489E1 true USRE45489E1 (en) | 2015-04-28 |
Family
ID=25107283
Family Applications (6)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US09/776,403 Expired - Lifetime US6706989B2 (en) | 2001-02-02 | 2001-02-02 | Automated high-throughput seed sample processing system and method |
| US10/731,208 Expired - Lifetime US7290665B2 (en) | 2001-02-02 | 2003-12-09 | Automated high-throughput seed sample handling system and method |
| US11/860,055 Expired - Lifetime US7905050B2 (en) | 2001-02-02 | 2007-09-24 | Automated high-throughput seed sample handling system and method |
| US11/860,068 Expired - Fee Related US7588151B2 (en) | 2001-02-02 | 2007-09-24 | Automated high-throughput seed sample handling system and method |
| US11/860,101 Expired - Fee Related US7591374B2 (en) | 2001-02-02 | 2007-09-24 | Automated high-throughput seed sample handling system and method |
| US13/733,544 Expired - Lifetime USRE45489E1 (en) | 2001-02-02 | 2013-01-03 | Automated high-throughput seed sample handling system and method |
Family Applications Before (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US09/776,403 Expired - Lifetime US6706989B2 (en) | 2001-02-02 | 2001-02-02 | Automated high-throughput seed sample processing system and method |
| US10/731,208 Expired - Lifetime US7290665B2 (en) | 2001-02-02 | 2003-12-09 | Automated high-throughput seed sample handling system and method |
| US11/860,055 Expired - Lifetime US7905050B2 (en) | 2001-02-02 | 2007-09-24 | Automated high-throughput seed sample handling system and method |
| US11/860,068 Expired - Fee Related US7588151B2 (en) | 2001-02-02 | 2007-09-24 | Automated high-throughput seed sample handling system and method |
| US11/860,101 Expired - Fee Related US7591374B2 (en) | 2001-02-02 | 2007-09-24 | Automated high-throughput seed sample handling system and method |
Country Status (1)
| Country | Link |
|---|---|
| US (6) | US6706989B2 (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150314335A1 (en) * | 2014-05-02 | 2015-11-05 | The Quaker Oats Company | Method and System for Producing Reduced Gluten Oat Mixture |
| US11298723B2 (en) | 2016-06-29 | 2022-04-12 | BASF Agricultural Solutions Seed US LLC | Methods and systems for sorting cottonseed |
| US11925943B2 (en) | 2020-03-25 | 2024-03-12 | Crown Iron Works Company | Hydraulic shell-seed separator |
Families Citing this family (103)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040268446A1 (en) * | 2003-06-30 | 2004-12-30 | Brian Penttila | Method for classifying plant embryos using Raman spectroscopy |
| US6706989B2 (en) * | 2001-02-02 | 2004-03-16 | Pioneer Hi-Bred International, Inc. | Automated high-throughput seed sample processing system and method |
| CN1511254A (en) * | 2001-05-18 | 2004-07-07 | Զ������̫ | Method of screening germ for cell-free protein synthesis and method of producing germ extract for cell-free protein synthesis |
| US7044306B2 (en) * | 2002-04-04 | 2006-05-16 | Monsanto Technology Llc | Automated picking, weighing and sorting system for particulate matter |
| US6924451B2 (en) * | 2002-10-08 | 2005-08-02 | Lockheed Martin Corporation | Method for sequentially ordering objects using a single pass delivery point process |
| EP1431744B1 (en) * | 2002-12-18 | 2006-11-02 | CropDesign N.V. | Evaluation of particulate material |
| US7403855B2 (en) * | 2002-12-19 | 2008-07-22 | Pioneer Hi-Bred International, Inc. | Method and apparatus for tracking individual plants while growing and/or after harvest |
| ES2300420T3 (en) * | 2002-12-23 | 2008-06-16 | Cropdesign N.V. | AUTOMATED SYSTEM FOR THE HANDLING OF CONTAINERS CONTAINING PLANTS. |
| US20050060958A1 (en) * | 2003-08-29 | 2005-03-24 | Delta And Pine Land Company | Seed handling systems and methods |
| MXPA06003184A (en) * | 2003-09-23 | 2006-06-23 | Monsanto Technology Llc | High throughput automated seed analysis system. |
| US7218231B2 (en) * | 2004-07-29 | 2007-05-15 | Omnicell, Inc. | Method and apparatus for preparing an item with an RFID tag |
| US7703238B2 (en) * | 2004-08-26 | 2010-04-27 | Monsanto Technology Llc | Methods of seed breeding using high throughput nondestructive seed sampling |
| BRPI0514276B1 (en) * | 2004-08-26 | 2017-12-12 | Monsanto Technology Llc | Apparatus and method for automated seed testing |
| US7832143B2 (en) | 2004-08-26 | 2010-11-16 | Monsanto Technology Llc | High throughput methods for sampling seeds |
| CN101080165B (en) * | 2004-08-26 | 2012-08-15 | 孟山都技术有限公司 | Automated seed sampler and methods of sampling, testing and bulking seeds |
| US8341880B2 (en) | 2004-09-16 | 2013-01-01 | Cropdesign N.V. | Root evaluation |
| CA2490973A1 (en) * | 2004-12-22 | 2006-06-22 | Mobil Grain Ltd. | Method and apparatus for moving agricultural commodities |
| US20060237349A1 (en) * | 2005-04-21 | 2006-10-26 | Solomon Michael T | Secure collection of rejected articles |
| EP2166350A1 (en) | 2005-08-26 | 2010-03-24 | Monsanto Technology LLC | High throughput screening of fatty acid compositions |
| US20070098364A1 (en) * | 2005-10-13 | 2007-05-03 | Toennis Allan M | System for making a personalized digital recording |
| DE102005052769B4 (en) * | 2005-11-02 | 2007-08-23 | Bitzer Wiegetechnik Gmbh | Device for determining the quality of a cereal sample |
| US7510363B2 (en) * | 2006-02-24 | 2009-03-31 | Northrop Grumman Systems Corporation | Bundle handling device |
| US8028469B2 (en) | 2006-03-02 | 2011-10-04 | Monsanto Technology Llc | Automated high-throughput seed sampler and methods of sampling, testing and bulking seeds |
| US7998669B2 (en) | 2006-03-02 | 2011-08-16 | Monsanto Technology Llc | Automated contamination-free seed sampler and methods of sampling, testing and bulking seeds |
| MX2008012927A (en) * | 2006-04-06 | 2008-12-18 | Monsanto Technology Llc | Method for multivariate analysis in predicting a trait of interest. |
| EP2035157B1 (en) * | 2006-06-28 | 2017-09-06 | Monsanto Technology, LLC | Small object sorting system |
| US8887938B2 (en) | 2006-07-06 | 2014-11-18 | Pioneer Hi-Bred International, Inc. | Buckling clamshell container for automated aliquot and dispersal processes |
| DE602007011761D1 (en) | 2006-07-06 | 2011-02-17 | Pioneer Hi Bred Int | BICYCLE BAGS FOR AUTOMATED ALIQUOTING AND DISTRIBUTION PROCESSES |
| WO2008006063A2 (en) | 2006-07-06 | 2008-01-10 | Pioneer Hi-Bred International, Inc. | System, method, and computer program product for automated high-throughput seed sample aliquot preparation, treatment, and dispersal |
| FR2904951B1 (en) * | 2006-08-21 | 2009-03-06 | Sp3H Soc Par Actions Simplifie | METHOD FOR SAFEGUARDING THE COMPONENTS OF THE MOTORPROOF GROUP OF A VEHICLE FOLLOWING DEGRADATION OF THE FUEL. |
| US7915006B2 (en) * | 2006-11-13 | 2011-03-29 | Pioneer Hi-Bred International, Inc. | Methodologies, processes and automated devices for the orientation, sampling and collection of seed tissues from individual seed |
| CL2007003269A1 (en) * | 2006-11-13 | 2008-05-16 | Pionner Hi Bred International | A METHOD FOR TAKING A SEED SAMPLE THAT INCLUDES A MANUAL POSITIONING OF THE SEED IN A DETERMINED ORIENTATION AND THE SEPARATION OF A SEED SAMPLE BY DRIVING ONE OR MORE SHEETS THROUGH A PORTION OF THE SEED, A APAR |
| US8515573B2 (en) * | 2007-02-08 | 2013-08-20 | Glory Ltd. | Sort pattern creating device, sort pattern creating method, and sort pattern creating system |
| WO2008130939A1 (en) * | 2007-04-19 | 2008-10-30 | M-I Llc | Use of radio frequency identification tags to identify and monitor shaker screen life and performance |
| US8452445B2 (en) * | 2007-04-24 | 2013-05-28 | Pioneer Hi-Bred International, Inc. | Method and computer program product for distinguishing and sorting seeds containing a genetic element of interest |
| CN105300935A (en) * | 2007-04-24 | 2016-02-03 | 先锋高级育种国际公司 | A method and computer program product for distinguishing and sorting seeds containing a genetic element of interest |
| US8459463B2 (en) * | 2007-04-24 | 2013-06-11 | Pioneer Hi-Bred International, Inc. | Method for sorting resistant seed from a mixture with susceptible seed |
| WO2008150903A1 (en) | 2007-05-31 | 2008-12-11 | Monsanto Technology Llc | Seed sorter |
| US8702371B2 (en) * | 2007-07-06 | 2014-04-22 | Pioneer Hi Bred International Inc | Method of handling clamshell containers containing a particulate aliquot |
| EP2200419B1 (en) * | 2007-08-29 | 2018-05-02 | Monsanto Technology, LLC | Systems and methods for processing hybrid seed |
| US20090075325A1 (en) * | 2007-09-19 | 2009-03-19 | Monsanto Technology Llc | Systems and methods for analyzing agricultural products |
| US8458953B2 (en) * | 2007-11-13 | 2013-06-11 | Pioneer Hi-Bred International, Inc. | High speed seed treatment apparatus |
| US7830504B2 (en) * | 2007-11-20 | 2010-11-09 | Monsanto Technology Llc | Automated systems and assemblies for use in evaluating agricultural products and methods therefor |
| US8568821B2 (en) * | 2008-04-08 | 2013-10-29 | Pioneer Hi Bred International Inc | Apparatus and method for coating ears of corn |
| US8613158B2 (en) * | 2008-04-18 | 2013-12-24 | Ball Horticultural Company | Method for grouping a plurality of growth-induced seeds for commercial use or sale based on testing of each individual seed |
| DE102008026019B4 (en) * | 2008-05-30 | 2010-04-08 | Micronas Gmbh | Digital-to-analog converter circuitry |
| DE102008033979B4 (en) | 2008-07-21 | 2018-06-14 | Hans Joachim Bruins | Measuring device and method for measuring properties of a particulate sample |
| US20100023430A1 (en) * | 2008-07-24 | 2010-01-28 | Pioneer Hi-Bred International, Inc. | System and method for coordinating the production and processing of seed supplies, and the preparation and utilization of seed samples |
| MX2011001798A (en) * | 2008-08-22 | 2011-04-04 | Pioneer Hi Bred Int | Method and system for data driven management of individual seeds. |
| CA2735047C (en) * | 2008-08-22 | 2014-05-13 | Pioneer Hi-Bred International, Inc. | High throughput automated apparatus, method and system for coating ears of corn |
| BRPI0916984A2 (en) * | 2008-08-22 | 2015-11-24 | Pioneer Hi Bred Int | resource efficient seed selection apparatus for commercial scale production or research to conduct laser ablation on a seed |
| WO2010033430A1 (en) * | 2008-09-16 | 2010-03-25 | Pioneer Hi-Bred International, Inc. | Automated research planting system, method, and apparatus |
| EP3081077B1 (en) | 2008-09-16 | 2019-06-19 | BASF Plant Science GmbH | Method for improved plant breeding |
| GB2466621A (en) * | 2008-12-23 | 2010-06-30 | Buhler Sortex Ltd | Sorting matter in a flow by comparing reflectance intensities at different wavelengths |
| US8682027B2 (en) | 2009-02-16 | 2014-03-25 | Satake Usa, Inc. | System to determine product density |
| US8175327B2 (en) * | 2009-02-16 | 2012-05-08 | Satake Usa, Inc. | System to determine in near real-time product density in a continuous dispensing product flow |
| US9091623B2 (en) | 2009-02-16 | 2015-07-28 | Satake Usa, Inc. | System to determine product characteristics, counts, and per unit weight details |
| EP2398600A1 (en) * | 2009-02-18 | 2011-12-28 | Pioneer Hi-Bred International, Inc. | Apparatus and system for preparing ears of corn for automated handling, positioning and orienting |
| US8313053B2 (en) | 2009-03-20 | 2012-11-20 | Pioneer Hi-Bred International, Inc. | High throughput, seed sampling and collection system and method |
| US9842252B2 (en) * | 2009-05-29 | 2017-12-12 | Monsanto Technology Llc | Systems and methods for use in characterizing agricultural products |
| US8616377B2 (en) * | 2009-07-09 | 2013-12-31 | Ecopaq Llc | Device and method for single stream recycling of hazardous materials |
| US8943785B2 (en) * | 2009-08-20 | 2015-02-03 | Pioneer Hi Bred International Inc | Automated high-throughput seed processing apparatus |
| WO2011022015A1 (en) * | 2009-08-20 | 2011-02-24 | Pioneer Hi-Bred International, Inc. | Automated high-throughput seed processing apparatus and method |
| US8523092B2 (en) | 2009-09-14 | 2013-09-03 | Pioneer Hi-Bred International, Inc. | System and method for creating a test sample from individual seeds or tissue structures |
| JP2011080384A (en) * | 2009-10-05 | 2011-04-21 | Otics Corp | Vehicle engine |
| CN102686099B (en) * | 2009-12-31 | 2014-09-10 | 先锋国际良种公司 | Automated seed sampling apparatus,method and system |
| US8833565B2 (en) | 2010-06-08 | 2014-09-16 | Pioneer Hi-Bred International, Inc. | Apparatus and method for seed selection |
| US8546704B1 (en) * | 2010-06-16 | 2013-10-01 | Maurice Minardi | Precise count high volume preform delivery system |
| MX2013000790A (en) | 2010-07-20 | 2013-03-20 | Monsanto Technology Llc | Automated systems for removing tissue samples from seeds, and related methods. |
| US20130298459A1 (en) * | 2010-09-06 | 2013-11-14 | Jeff Bucove | System and method for automating crop associated selection of spectral agricultural lighting programs |
| US9278377B2 (en) | 2010-11-09 | 2016-03-08 | Pioneer Hi Bred International Inc | System and method for sensor-based feedback control of a seed conditioning and production process |
| CN105121039A (en) * | 2013-01-08 | 2015-12-02 | 先锋国际良种公司 | Systems and methods for sorting seeds |
| US10401373B1 (en) | 2013-02-18 | 2019-09-03 | Theranos Ip Company, Llc | Systems and methods for analyte testing and laboratory oversight |
| US11008628B1 (en) * | 2013-02-18 | 2021-05-18 | Labrador Diagnostics Llc | Systems and methods for analyte testing and laboratory oversight |
| US9658176B2 (en) * | 2013-03-15 | 2017-05-23 | Monsanto Technology Llc | High-throughput sorting of small objects via oil and/or moisture content using low-field nuclear magnetic resonance |
| IN2013MU03035A (en) * | 2013-09-20 | 2015-07-10 | Everest Instr Pvt Ltd | |
| UA120914C2 (en) * | 2013-09-30 | 2020-03-10 | Пресіжн Плентінг Елелсі | Methods and systems for seed variety selection |
| DE102013021898A1 (en) * | 2013-12-24 | 2015-06-25 | Kws Saat Ag | Method of classifying seeds |
| US11360107B1 (en) | 2014-02-25 | 2022-06-14 | Labrador Diagnostics Llc | Systems and methods for sample handling |
| US9725254B2 (en) | 2014-08-21 | 2017-08-08 | Cnh Industrial Canada, Ltd. | Configurations of inlet and outlets of air filled auxiliary tank of air seeders |
| US9950876B2 (en) * | 2014-09-26 | 2018-04-24 | Cnh Industrial Canada, Ltd. | Downward elbow with cyclonic effect and product overflow capability |
| US10048241B2 (en) | 2015-05-28 | 2018-08-14 | Desert Valley Date, Inc. | Moisture detection apparatus and process |
| US10107785B2 (en) | 2015-09-24 | 2018-10-23 | Frito-Lay North America, Inc. | Quantitative liquid texture measurement apparatus and method |
| US9541537B1 (en) * | 2015-09-24 | 2017-01-10 | Frito-Lay North America, Inc. | Quantitative texture measurement apparatus and method |
| US11243190B2 (en) | 2015-09-24 | 2022-02-08 | Frito-Lay North America, Inc. | Quantitative liquid texture measurement method |
| US10969316B2 (en) | 2015-09-24 | 2021-04-06 | Frito-Lay North America, Inc. | Quantitative in-situ texture measurement apparatus and method |
| US10070661B2 (en) | 2015-09-24 | 2018-09-11 | Frito-Lay North America, Inc. | Feedback control of food texture system and method |
| US10598648B2 (en) | 2015-09-24 | 2020-03-24 | Frito-Lay North America, Inc. | Quantitative texture measurement apparatus and method |
| CA2912761A1 (en) * | 2015-11-23 | 2017-05-23 | Ati Agritronics Inc. | Sampling system |
| CN105537148B (en) * | 2016-03-07 | 2018-03-06 | 福州仰望网络科技有限公司 | A kind of intelligent seed sorting packaging method and its device |
| US10690592B2 (en) | 2016-03-15 | 2020-06-23 | University Of Florida Research Foundation, Incorporated | Haploid seed classification using single seed near-infrared spectroscopy |
| CN106362953A (en) * | 2016-08-23 | 2017-02-01 | 云南宏伟种业有限公司 | Seed sorting and casing traceability system and sorting and casing tracing method |
| US10837927B2 (en) * | 2016-09-20 | 2020-11-17 | Frito-Lay North America, Inc. | NMR based non-invasive and quantitative food attribute measurement apparatus and method |
| CN106647889B (en) * | 2016-11-13 | 2018-06-15 | 云南省农业科学院粮食作物研究所 | One kind is based on monolithic processor controlled seed germination experiment aid decision-making system |
| WO2019046788A1 (en) * | 2017-08-31 | 2019-03-07 | Monsanto Technology Llc | Seed fulfillment system |
| CN108966725A (en) * | 2018-06-07 | 2018-12-11 | 明光市涧溪镇桃花溪家庭农场 | A kind of rice paddy seed sunning screening plant |
| CN109466837A (en) * | 2018-09-04 | 2019-03-15 | 河南龙丰实业股份有限公司 | A kind of needle mushroom harvests automatically and technology of the package |
| WO2022005902A1 (en) | 2020-06-30 | 2022-01-06 | Monsanto Technology Llc | Automated systems for use in sorting small objects, and related methods |
| CN111670632B (en) * | 2020-07-06 | 2021-12-03 | 临沂大学 | Device and method for improving germination rate of alfalfa under continuous cropping |
| CN111919754B (en) * | 2020-09-16 | 2021-06-01 | 乐陵希森马铃薯产业集团有限公司 | Potato tissue culture method |
| CN112740868B (en) * | 2021-01-22 | 2021-11-09 | 淄博市农业科学研究院 | Accurate screening plant of maize seed grain |
| US20240253081A1 (en) * | 2021-07-05 | 2024-08-01 | Balsu Gida Sanayi Ve Ticaret Anonim Sirketi | Laser line for use in hazelnut processing facilities |
| CN113634501B (en) * | 2021-07-20 | 2022-03-11 | 深圳市标谱半导体科技有限公司 | Centralized light splitting test device |
Citations (83)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1057877A (en) | 1912-08-27 | 1913-04-01 | John Morton Peeples | Seed-tester. |
| US3195485A (en) | 1963-05-21 | 1965-07-20 | Reynolds Marlyn Ward | Orientation planting apparatus |
| US3366239A (en) * | 1965-01-21 | 1968-01-30 | Southwestern Eng Co | Self-cleaning screen structure for vibratory separators |
| US3530372A (en) | 1967-03-03 | 1970-09-22 | Laukien Guenther | Method and apparatus for selecting plant seeds for sowing |
| US3572548A (en) | 1969-06-16 | 1971-03-30 | Bernard P Fuchs | Plateless seed planter |
| US3682303A (en) | 1970-04-03 | 1972-08-08 | Leon G Feterl | Machine for continuously removing over-sized undesirable material from crop material mixtures |
| US4230983A (en) * | 1978-11-24 | 1980-10-28 | Agro Sciences, Inc. | Seed viability analyzer |
| US4278183A (en) | 1978-05-04 | 1981-07-14 | National Research Development Corporation | Dispensing apparatus and method |
| US4305130A (en) | 1979-05-29 | 1981-12-08 | University Of Rhode Island | Apparatus and method to enable a robot with vision to acquire, orient and transport workpieces |
| EP0127313A1 (en) | 1983-04-26 | 1984-12-05 | Centre National De La Recherche Scientifique (Cnrs) | The production of haploid seed, of doubled haploids and of homozygous plant lines therefrom |
| US4602716A (en) | 1982-02-23 | 1986-07-29 | Licencia Talalmanyokat Ertekesito Vallalat | Process for determining the soundness of sowing seeds and their soundness-dependent germinative ability, and apparatus for carrying out the process |
| US4677474A (en) | 1984-07-02 | 1987-06-30 | Canon Kabushiki Kaisha | Wafer prober |
| US4697709A (en) | 1985-09-03 | 1987-10-06 | Delta Technology Corporation | Sorter for agricultural products |
| US5135114A (en) | 1988-08-11 | 1992-08-04 | Satake Engineering Co., Ltd. | Apparatus for evaluating the grade of rice grains |
| RU1805835C (en) | 1991-04-09 | 1993-03-30 | Павел Петрович Демкин | Method of evaluating seed material for homogeneity and heterogeneity |
| US5607061A (en) | 1995-03-16 | 1997-03-04 | Felden; Richard W. | Material separator system utilizing air flow |
| US5664402A (en) * | 1995-09-28 | 1997-09-09 | Gary W. Clem, Inc. | Method and means for harvesting and packaging seeds |
| US5669511A (en) | 1994-10-07 | 1997-09-23 | Satake Corporation | Grain sorting apparatus |
| US5677474A (en) | 1988-07-29 | 1997-10-14 | Washington University | Producing commercially valuable polypeptides with genetically transformed endosperm tissue |
| US5733592A (en) | 1992-12-02 | 1998-03-31 | Buhler Ag | Method for cleaning and sorting bulk material |
| US5751421A (en) | 1997-02-27 | 1998-05-12 | Pioneer Hi-Bred International, Inc. | Near infrared spectrometer used in combination with a combine for real time grain analysis |
| US5813542A (en) | 1996-04-05 | 1998-09-29 | Allen Machinery, Inc. | Color sorting method |
| US5835206A (en) * | 1996-05-22 | 1998-11-10 | Zenco (No. 4) Limited | Use of color image analyzers for quantifying grain quality traits |
| US5893218A (en) | 1997-04-15 | 1999-04-13 | Pioneer Hi-Bred International, Inc. | Seed dryer with automatic control of temperature air flow direction and rate |
| US5957304A (en) | 1995-01-25 | 1999-09-28 | Agco Limited | Crop harvester |
| US5979252A (en) | 1998-05-08 | 1999-11-09 | Pioneer Hi-Bred International, Inc. | Scaleable static sample divider |
| US5987384A (en) * | 1997-10-30 | 1999-11-16 | Monsanto Corporation | Method and apparatus for culling directly on a harvesting apparatus |
| US5986230A (en) | 1996-09-13 | 1999-11-16 | Uncle Ben's, Inc. | Method and apparatus for sorting product |
| US5991025A (en) | 1997-02-27 | 1999-11-23 | Pioneer Hi-Bred International, Inc. | Near infrared spectrometer used in combination with an agricultural implement for real time grain and forage analysis |
| US6085443A (en) | 1999-09-03 | 2000-07-11 | Pioneer Hi-Bred International, Inc. | Apparatus and method for drying relatively small lots of products |
| US6150158A (en) | 1995-12-01 | 2000-11-21 | E. I. Du Pont De Nemours And Company | Agricultural product microscreen method and apparatus |
| WO2000071993A1 (en) * | 1999-05-24 | 2000-11-30 | Iowa State University Research Foundation, Inc. | Near infrared spectroscopy system and method for the identification of genetically modified grain |
| US6248968B1 (en) | 1999-06-09 | 2001-06-19 | Capintec, Inc. | Method and apparatus for assaying seeds used in medical applications |
| US6307123B1 (en) | 1998-05-18 | 2001-10-23 | Dekalb Genetics Corporation | Methods and compositions for transgene identification |
| KR100339689B1 (en) | 2000-04-28 | 2002-06-05 | 김우호 | An apparatus and method for microarrays of tissue sample |
| US20020070150A1 (en) | 2000-08-25 | 2002-06-13 | Keller Douglas O. | Robotic seed-handling apparatus and methods |
| WO2002059586A2 (en) | 2000-12-20 | 2002-08-01 | Monsanto Technology Llc | Apparatus and methods for analyzing and improving agricultural products |
| RU2187919C2 (en) | 2000-07-10 | 2002-08-27 | Федеральное государственное унитарное предприятие Научно-исследовательский институт сельскохозяйственных приборов "Агроприбор" | Method for separating seeds in electric field |
| US6508033B2 (en) | 1999-09-01 | 2003-01-21 | Organitech Ltd. | Self contained fully automated robotic crop production facility |
| US6537826B1 (en) | 1999-09-07 | 2003-03-25 | Akira Horigane | Process for material preparation, apparatus therefor and method for analysis |
| US6582159B2 (en) | 1996-06-27 | 2003-06-24 | Weyerhaeuser Company | Upstream engaging fluid switch for serial conveying |
| US6635840B1 (en) * | 1997-10-31 | 2003-10-21 | Pioneer Hi-Bred International, Inc. | Method of sorting and categorizing seed |
| US6646264B1 (en) | 2000-10-30 | 2003-11-11 | Monsanto Technology Llc | Methods and devices for analyzing agricultural products |
| US20040043117A1 (en) | 2002-08-29 | 2004-03-04 | Jason Cope | Apparatus and method for removal of seed pericarp |
| US6706989B2 (en) | 2001-02-02 | 2004-03-16 | Pioneer Hi-Bred International, Inc. | Automated high-throughput seed sample processing system and method |
| US20040074822A1 (en) | 2002-08-05 | 2004-04-22 | Akira Horigane | Apparatus and process for settling, analyzing and sorting materials, and sorted products |
| US20040091888A1 (en) | 2002-03-20 | 2004-05-13 | Takeshi Nishio | Method for identification of S genotype in brassicaceae |
| US6809819B1 (en) | 1999-09-27 | 2004-10-26 | Monsanto Technology Llc | Methods for determining oil in seeds |
| US20040267457A1 (en) | 2003-06-30 | 2004-12-30 | Roger Timmis | Automated system and method for harvesting and multi-stage screening of plant embryos |
| US6865556B2 (en) | 2001-02-09 | 2005-03-08 | Monsanto Technology Llc | Identification of seeds or plants using phenotypic markers |
| US6880771B2 (en) | 2002-02-01 | 2005-04-19 | Monsanto Technology Llc | Axially reciprocating tubular ball mill grinding device and method |
| US6947144B2 (en) | 2000-04-07 | 2005-09-20 | Dongbu Hannong Chemical Co., Ltd. | vivo monitoring method of transgenic plants and system using the same |
| US6959617B2 (en) | 2002-05-24 | 2005-11-01 | Monsanto Technology Llc | Seed coring system and method for arranging seed cores for analysis |
| US7044306B2 (en) | 2002-04-04 | 2006-05-16 | Monsanto Technology Llc | Automated picking, weighing and sorting system for particulate matter |
| US7076834B2 (en) | 2003-05-20 | 2006-07-18 | Lushridge Incorporated | Cabinet door buffer bar |
| US20080131924A1 (en) | 2006-11-13 | 2008-06-05 | Pioneer Hi-Bred International, Inc. | Methodologies, processes and automated devices for orientation, sampling and collections of seed tissues from individual seeds |
| US7401528B2 (en) | 2006-06-22 | 2008-07-22 | Monsanto Technology Llc | Apparatus and methods for evaluating plant stalk strength |
| US7502113B2 (en) | 2004-08-26 | 2009-03-10 | Monsanto Technology Llc | Automated seed sampler and methods of sampling, testing and bulking seeds |
| US20090077932A1 (en) | 2007-09-26 | 2009-03-26 | Pioneer Hi-Bred International, Inc. | Apparatus and method to package articles for storage and identification |
| US20090155878A1 (en) | 2007-12-17 | 2009-06-18 | Pioneer Hi-Bred International, Inc. | Apparatus, method and system for creating, handling, collecting and indexing seed and seed portions from plant seed |
| US20090252880A1 (en) | 2008-04-08 | 2009-10-08 | Pioneer Hi-Bred International, Inc. | Apparatus and method for coating ears of corn |
| US7600642B2 (en) | 2003-09-23 | 2009-10-13 | Monsanto Technology, Llc | High throughput automated seed analysis system |
| US20090320955A1 (en) | 2008-06-26 | 2009-12-31 | Pioneer Hi-Bred International, Inc. | Apparatus, method and system for reconfiguring items |
| US20100044356A1 (en) | 2008-08-22 | 2010-02-25 | Pioneer Hi-Bred International, Inc. | Apparatus for removal of specific seed tissue or structure for seed analysis |
| US20100047912A1 (en) | 2008-08-22 | 2010-02-25 | Pioneer Hi-Bred International, Inc. | Apparatus, method and system for creating, collecting and indexing seed portions from individual seed |
| US20100047441A1 (en) | 2007-11-21 | 2010-02-25 | Kaname Mizokami | Method of manufacturing plasma display panel |
| US7673572B2 (en) | 2005-05-09 | 2010-03-09 | Monsanto Technology Llc | Custom planter and method of custom planting |
| US7685768B2 (en) | 2004-08-26 | 2010-03-30 | Monsanto Technology Llc | Automated testing of seeds |
| US7703238B2 (en) | 2004-08-26 | 2010-04-27 | Monsanto Technology Llc | Methods of seed breeding using high throughput nondestructive seed sampling |
| US7703237B2 (en) | 2004-07-29 | 2010-04-27 | Cho Sung-Rae | Apparatus for cultivating cucumber, eggplant. et al. |
| US7735626B2 (en) | 2006-11-13 | 2010-06-15 | Pioneer Hi-Bred International, Inc. | Apparatus, method and system for handling, positioning, and/or automatically orienting objects |
| US7775167B2 (en) | 2006-08-22 | 2010-08-17 | Monsanto Technology Llc | Custom planter and method of custom planting |
| US20100209576A1 (en) | 2009-02-18 | 2010-08-19 | Pioneer Hi-Bred International, Inc. | Method for preparing ears of corn for automated handling, positioning and orienting |
| US7807446B2 (en) | 2006-02-13 | 2010-10-05 | Monsanto Technology Llc | High throughput system and methods for analyzing liquid formulations |
| US7832143B2 (en) | 2004-08-26 | 2010-11-16 | Monsanto Technology Llc | High throughput methods for sampling seeds |
| US7909276B2 (en) | 2007-02-23 | 2011-03-22 | Monsanto Technology Llc | Agricultural sample grinder |
| US20110160068A1 (en) | 2009-12-31 | 2011-06-30 | Pioneer Hi-Bred International, Inc. | Automated seed sampling apparatus, method and system |
| US7998669B2 (en) | 2006-03-02 | 2011-08-16 | Monsanto Technology Llc | Automated contamination-free seed sampler and methods of sampling, testing and bulking seeds |
| US8028469B2 (en) | 2006-03-02 | 2011-10-04 | Monsanto Technology Llc | Automated high-throughput seed sampler and methods of sampling, testing and bulking seeds |
| US20110297589A1 (en) | 2010-06-08 | 2011-12-08 | Pioneer Hi-Bred International, Inc. | Apparatus and method for seed selection |
| US8076076B2 (en) | 2007-08-29 | 2011-12-13 | Monsanto Technology Llc | Systems and methods for processing hybrid seed |
| US8189901B2 (en) | 2007-05-31 | 2012-05-29 | Monsanto Technology Llc | Seed sorter |
| US8220293B2 (en) | 2007-10-08 | 2012-07-17 | Miele & Cie. Kg | Treating agent dispensing system for a washing machine, and washing machine |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4288320A (en) * | 1980-05-05 | 1981-09-08 | Litton Systems, Inc. | Vibrating screen with screen deck unclogging mechanism |
-
2001
- 2001-02-02 US US09/776,403 patent/US6706989B2/en not_active Expired - Lifetime
-
2003
- 2003-12-09 US US10/731,208 patent/US7290665B2/en not_active Expired - Lifetime
-
2007
- 2007-09-24 US US11/860,055 patent/US7905050B2/en not_active Expired - Lifetime
- 2007-09-24 US US11/860,068 patent/US7588151B2/en not_active Expired - Fee Related
- 2007-09-24 US US11/860,101 patent/US7591374B2/en not_active Expired - Fee Related
-
2013
- 2013-01-03 US US13/733,544 patent/USRE45489E1/en not_active Expired - Lifetime
Patent Citations (105)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1057877A (en) | 1912-08-27 | 1913-04-01 | John Morton Peeples | Seed-tester. |
| US3195485A (en) | 1963-05-21 | 1965-07-20 | Reynolds Marlyn Ward | Orientation planting apparatus |
| US3366239A (en) * | 1965-01-21 | 1968-01-30 | Southwestern Eng Co | Self-cleaning screen structure for vibratory separators |
| US3530372A (en) | 1967-03-03 | 1970-09-22 | Laukien Guenther | Method and apparatus for selecting plant seeds for sowing |
| US3572548A (en) | 1969-06-16 | 1971-03-30 | Bernard P Fuchs | Plateless seed planter |
| US3682303A (en) | 1970-04-03 | 1972-08-08 | Leon G Feterl | Machine for continuously removing over-sized undesirable material from crop material mixtures |
| US4278183A (en) | 1978-05-04 | 1981-07-14 | National Research Development Corporation | Dispensing apparatus and method |
| US4230983A (en) * | 1978-11-24 | 1980-10-28 | Agro Sciences, Inc. | Seed viability analyzer |
| US4305130A (en) | 1979-05-29 | 1981-12-08 | University Of Rhode Island | Apparatus and method to enable a robot with vision to acquire, orient and transport workpieces |
| US4602716A (en) | 1982-02-23 | 1986-07-29 | Licencia Talalmanyokat Ertekesito Vallalat | Process for determining the soundness of sowing seeds and their soundness-dependent germinative ability, and apparatus for carrying out the process |
| EP0127313A1 (en) | 1983-04-26 | 1984-12-05 | Centre National De La Recherche Scientifique (Cnrs) | The production of haploid seed, of doubled haploids and of homozygous plant lines therefrom |
| US4677474A (en) | 1984-07-02 | 1987-06-30 | Canon Kabushiki Kaisha | Wafer prober |
| US4697709A (en) | 1985-09-03 | 1987-10-06 | Delta Technology Corporation | Sorter for agricultural products |
| US5677474A (en) | 1988-07-29 | 1997-10-14 | Washington University | Producing commercially valuable polypeptides with genetically transformed endosperm tissue |
| US5135114A (en) | 1988-08-11 | 1992-08-04 | Satake Engineering Co., Ltd. | Apparatus for evaluating the grade of rice grains |
| RU1805835C (en) | 1991-04-09 | 1993-03-30 | Павел Петрович Демкин | Method of evaluating seed material for homogeneity and heterogeneity |
| US5733592A (en) | 1992-12-02 | 1998-03-31 | Buhler Ag | Method for cleaning and sorting bulk material |
| US5669511A (en) | 1994-10-07 | 1997-09-23 | Satake Corporation | Grain sorting apparatus |
| US5957304A (en) | 1995-01-25 | 1999-09-28 | Agco Limited | Crop harvester |
| US5607061A (en) | 1995-03-16 | 1997-03-04 | Felden; Richard W. | Material separator system utilizing air flow |
| US5664402A (en) * | 1995-09-28 | 1997-09-09 | Gary W. Clem, Inc. | Method and means for harvesting and packaging seeds |
| US6150158A (en) | 1995-12-01 | 2000-11-21 | E. I. Du Pont De Nemours And Company | Agricultural product microscreen method and apparatus |
| US5813542A (en) | 1996-04-05 | 1998-09-29 | Allen Machinery, Inc. | Color sorting method |
| US5835206A (en) * | 1996-05-22 | 1998-11-10 | Zenco (No. 4) Limited | Use of color image analyzers for quantifying grain quality traits |
| US6582159B2 (en) | 1996-06-27 | 2003-06-24 | Weyerhaeuser Company | Upstream engaging fluid switch for serial conveying |
| US5986230A (en) | 1996-09-13 | 1999-11-16 | Uncle Ben's, Inc. | Method and apparatus for sorting product |
| US5751421A (en) | 1997-02-27 | 1998-05-12 | Pioneer Hi-Bred International, Inc. | Near infrared spectrometer used in combination with a combine for real time grain analysis |
| US5991025A (en) | 1997-02-27 | 1999-11-23 | Pioneer Hi-Bred International, Inc. | Near infrared spectrometer used in combination with an agricultural implement for real time grain and forage analysis |
| US5893218A (en) | 1997-04-15 | 1999-04-13 | Pioneer Hi-Bred International, Inc. | Seed dryer with automatic control of temperature air flow direction and rate |
| US5987384A (en) * | 1997-10-30 | 1999-11-16 | Monsanto Corporation | Method and apparatus for culling directly on a harvesting apparatus |
| US6635840B1 (en) * | 1997-10-31 | 2003-10-21 | Pioneer Hi-Bred International, Inc. | Method of sorting and categorizing seed |
| US5979252A (en) | 1998-05-08 | 1999-11-09 | Pioneer Hi-Bred International, Inc. | Scaleable static sample divider |
| US6307123B1 (en) | 1998-05-18 | 2001-10-23 | Dekalb Genetics Corporation | Methods and compositions for transgene identification |
| WO2000071993A1 (en) * | 1999-05-24 | 2000-11-30 | Iowa State University Research Foundation, Inc. | Near infrared spectroscopy system and method for the identification of genetically modified grain |
| US6248968B1 (en) | 1999-06-09 | 2001-06-19 | Capintec, Inc. | Method and apparatus for assaying seeds used in medical applications |
| US6508033B2 (en) | 1999-09-01 | 2003-01-21 | Organitech Ltd. | Self contained fully automated robotic crop production facility |
| US6085443A (en) | 1999-09-03 | 2000-07-11 | Pioneer Hi-Bred International, Inc. | Apparatus and method for drying relatively small lots of products |
| US6230419B1 (en) | 1999-09-03 | 2001-05-15 | Pioneer Hi-Bred International, Inc. | Apparatus and method for drying relatively small lots of products |
| US6537826B1 (en) | 1999-09-07 | 2003-03-25 | Akira Horigane | Process for material preparation, apparatus therefor and method for analysis |
| US6809819B1 (en) | 1999-09-27 | 2004-10-26 | Monsanto Technology Llc | Methods for determining oil in seeds |
| US6947144B2 (en) | 2000-04-07 | 2005-09-20 | Dongbu Hannong Chemical Co., Ltd. | vivo monitoring method of transgenic plants and system using the same |
| KR100339689B1 (en) | 2000-04-28 | 2002-06-05 | 김우호 | An apparatus and method for microarrays of tissue sample |
| RU2187919C2 (en) | 2000-07-10 | 2002-08-27 | Федеральное государственное унитарное предприятие Научно-исследовательский институт сельскохозяйственных приборов "Агроприбор" | Method for separating seeds in electric field |
| US20020070150A1 (en) | 2000-08-25 | 2002-06-13 | Keller Douglas O. | Robotic seed-handling apparatus and methods |
| US6705827B2 (en) | 2000-08-25 | 2004-03-16 | Aagrinomics, Llc | Robotic seed-handling apparatus and methods |
| US6646264B1 (en) | 2000-10-30 | 2003-11-11 | Monsanto Technology Llc | Methods and devices for analyzing agricultural products |
| EP1346206A2 (en) | 2000-12-20 | 2003-09-24 | Monsanto Technology LLC | Apparatus and methods for analyzing and improving agricultural products |
| US7367155B2 (en) * | 2000-12-20 | 2008-05-06 | Monsanto Technology Llc | Apparatus and methods for analyzing and improving agricultural products |
| WO2002059586A2 (en) | 2000-12-20 | 2002-08-01 | Monsanto Technology Llc | Apparatus and methods for analyzing and improving agricultural products |
| US6706989B2 (en) | 2001-02-02 | 2004-03-16 | Pioneer Hi-Bred International, Inc. | Automated high-throughput seed sample processing system and method |
| US7591374B2 (en) | 2001-02-02 | 2009-09-22 | Pioneer Hi-Bred International, Inc. | Automated high-throughput seed sample handling system and method |
| US7588151B2 (en) | 2001-02-02 | 2009-09-15 | Pioneer Hi-Bred International, Inc. | Automated high-throughput seed sample handling system and method |
| US7905050B2 (en) | 2001-02-02 | 2011-03-15 | Pioneer Hi-Bred International, Inc. | Automated high-throughput seed sample handling system and method |
| US7290665B2 (en) | 2001-02-02 | 2007-11-06 | Pioneer Hi-Bred International, Inc. | Automated high-throughput seed sample handling system and method |
| US6865556B2 (en) | 2001-02-09 | 2005-03-08 | Monsanto Technology Llc | Identification of seeds or plants using phenotypic markers |
| US6880771B2 (en) | 2002-02-01 | 2005-04-19 | Monsanto Technology Llc | Axially reciprocating tubular ball mill grinding device and method |
| US20040091888A1 (en) | 2002-03-20 | 2004-05-13 | Takeshi Nishio | Method for identification of S genotype in brassicaceae |
| US7934600B2 (en) | 2002-04-04 | 2011-05-03 | Monsanto Technology Llc | Automated picking, weighing and sorting system for particulate matter |
| US7044306B2 (en) | 2002-04-04 | 2006-05-16 | Monsanto Technology Llc | Automated picking, weighing and sorting system for particulate matter |
| US7134351B2 (en) | 2002-05-24 | 2006-11-14 | Monsanto Technology Llc | Seed coring system and method for arranging seed cores for analysis |
| US6959617B2 (en) | 2002-05-24 | 2005-11-01 | Monsanto Technology Llc | Seed coring system and method for arranging seed cores for analysis |
| US7454989B2 (en) | 2002-05-24 | 2008-11-25 | Monsanto Technology Llc | Seed coring system and method for arranging seed cores for analysis |
| US20040074822A1 (en) | 2002-08-05 | 2004-04-22 | Akira Horigane | Apparatus and process for settling, analyzing and sorting materials, and sorted products |
| US7067834B2 (en) | 2002-08-05 | 2006-06-27 | Tsukuba Food Science, Inc. | Apparatus and process for securing, analyzing and sorting materials, and sorted products |
| US20040043117A1 (en) | 2002-08-29 | 2004-03-04 | Jason Cope | Apparatus and method for removal of seed pericarp |
| US7076834B2 (en) | 2003-05-20 | 2006-07-18 | Lushridge Incorporated | Cabinet door buffer bar |
| US20040267457A1 (en) | 2003-06-30 | 2004-12-30 | Roger Timmis | Automated system and method for harvesting and multi-stage screening of plant embryos |
| US7600642B2 (en) | 2003-09-23 | 2009-10-13 | Monsanto Technology, Llc | High throughput automated seed analysis system |
| US7703237B2 (en) | 2004-07-29 | 2010-04-27 | Cho Sung-Rae | Apparatus for cultivating cucumber, eggplant. et al. |
| US7703238B2 (en) | 2004-08-26 | 2010-04-27 | Monsanto Technology Llc | Methods of seed breeding using high throughput nondestructive seed sampling |
| US7767883B2 (en) | 2004-08-26 | 2010-08-03 | Monsanto Technology Llc | Automated seed sampler and methods of sampling, testing and bulking seeds |
| US8312672B2 (en) | 2004-08-26 | 2012-11-20 | Monsanto Technology Llc | Methods of seed breeding using high throughput nondestructive seed sampling |
| US8071845B2 (en) | 2004-08-26 | 2011-12-06 | Monsanto Technology Llc | Automated seed sampler and methods of sampling, testing and bulking seeds |
| US7611842B2 (en) | 2004-08-26 | 2009-11-03 | Monsanto Technology Llc | Automated seed sampler and methods of sampling, testing and bulking seeds |
| US7941969B2 (en) | 2004-08-26 | 2011-05-17 | Monsanto Technology Llc | Methods of seed breeding using high throughput nondestructive seed sampling |
| US7877926B2 (en) | 2004-08-26 | 2011-02-01 | Monsanto Technology Llc | Automated seed sampler and methods of sampling, testing and bulking seeds |
| US7849632B2 (en) | 2004-08-26 | 2010-12-14 | Monsanto Technology Llc | Automated seed sampler and methods of sampling, testing and bulking seeds |
| US7832143B2 (en) | 2004-08-26 | 2010-11-16 | Monsanto Technology Llc | High throughput methods for sampling seeds |
| US7591101B2 (en) | 2004-08-26 | 2009-09-22 | Monsanto Technology Llc | Automated seed sampler and methods of sampling, testing and bulking seeds |
| US7685768B2 (en) | 2004-08-26 | 2010-03-30 | Monsanto Technology Llc | Automated testing of seeds |
| US7830516B2 (en) | 2004-08-26 | 2010-11-09 | Monsanto Technology Llc | Automated seed sampler and methods of sampling, testing and bulking seeds |
| US7502113B2 (en) | 2004-08-26 | 2009-03-10 | Monsanto Technology Llc | Automated seed sampler and methods of sampling, testing and bulking seeds |
| US7673572B2 (en) | 2005-05-09 | 2010-03-09 | Monsanto Technology Llc | Custom planter and method of custom planting |
| US7807446B2 (en) | 2006-02-13 | 2010-10-05 | Monsanto Technology Llc | High throughput system and methods for analyzing liquid formulations |
| US8245439B2 (en) | 2006-03-02 | 2012-08-21 | Monsanto Technology Llc | Automated high-throughput seed sampler and methods of sampling, testing and bulking seeds |
| US8028469B2 (en) | 2006-03-02 | 2011-10-04 | Monsanto Technology Llc | Automated high-throughput seed sampler and methods of sampling, testing and bulking seeds |
| US7998669B2 (en) | 2006-03-02 | 2011-08-16 | Monsanto Technology Llc | Automated contamination-free seed sampler and methods of sampling, testing and bulking seeds |
| US7401528B2 (en) | 2006-06-22 | 2008-07-22 | Monsanto Technology Llc | Apparatus and methods for evaluating plant stalk strength |
| US7775167B2 (en) | 2006-08-22 | 2010-08-17 | Monsanto Technology Llc | Custom planter and method of custom planting |
| US7735626B2 (en) | 2006-11-13 | 2010-06-15 | Pioneer Hi-Bred International, Inc. | Apparatus, method and system for handling, positioning, and/or automatically orienting objects |
| US20080131924A1 (en) | 2006-11-13 | 2008-06-05 | Pioneer Hi-Bred International, Inc. | Methodologies, processes and automated devices for orientation, sampling and collections of seed tissues from individual seeds |
| US7909276B2 (en) | 2007-02-23 | 2011-03-22 | Monsanto Technology Llc | Agricultural sample grinder |
| US8189901B2 (en) | 2007-05-31 | 2012-05-29 | Monsanto Technology Llc | Seed sorter |
| US8076076B2 (en) | 2007-08-29 | 2011-12-13 | Monsanto Technology Llc | Systems and methods for processing hybrid seed |
| US20090077932A1 (en) | 2007-09-26 | 2009-03-26 | Pioneer Hi-Bred International, Inc. | Apparatus and method to package articles for storage and identification |
| US8220293B2 (en) | 2007-10-08 | 2012-07-17 | Miele & Cie. Kg | Treating agent dispensing system for a washing machine, and washing machine |
| US20100047441A1 (en) | 2007-11-21 | 2010-02-25 | Kaname Mizokami | Method of manufacturing plasma display panel |
| US20090155878A1 (en) | 2007-12-17 | 2009-06-18 | Pioneer Hi-Bred International, Inc. | Apparatus, method and system for creating, handling, collecting and indexing seed and seed portions from plant seed |
| US20090252880A1 (en) | 2008-04-08 | 2009-10-08 | Pioneer Hi-Bred International, Inc. | Apparatus and method for coating ears of corn |
| US20090320955A1 (en) | 2008-06-26 | 2009-12-31 | Pioneer Hi-Bred International, Inc. | Apparatus, method and system for reconfiguring items |
| US20100044356A1 (en) | 2008-08-22 | 2010-02-25 | Pioneer Hi-Bred International, Inc. | Apparatus for removal of specific seed tissue or structure for seed analysis |
| US20100047912A1 (en) | 2008-08-22 | 2010-02-25 | Pioneer Hi-Bred International, Inc. | Apparatus, method and system for creating, collecting and indexing seed portions from individual seed |
| US20100209576A1 (en) | 2009-02-18 | 2010-08-19 | Pioneer Hi-Bred International, Inc. | Method for preparing ears of corn for automated handling, positioning and orienting |
| US20110160068A1 (en) | 2009-12-31 | 2011-06-30 | Pioneer Hi-Bred International, Inc. | Automated seed sampling apparatus, method and system |
| US20110297589A1 (en) | 2010-06-08 | 2011-12-08 | Pioneer Hi-Bred International, Inc. | Apparatus and method for seed selection |
Non-Patent Citations (50)
| Title |
|---|
| Aitken-Christie J, et al., Automation in Plant Tissue Culture, Automation and Environmental Control in Plant Tissue Culture, pp. 1-18 (1995). |
| Arumuganathan K, et al. Estimation of Nuclear DNA Content of Plants by Flow Cytometry, Plant Molecular Biology Reporter, vol. 9, No. 3, pp. 229-241 (1991). |
| Casady WW, et al., An Automated Kernel Positioning Device for Computer Vision Analysis of Grain, American Society of Agricultural Engineers, vol. 32(5), pp. 1821-1826 (1989). |
| Chunwongse et al., Pre-germination genotypic screening using PCR amplification of half-seeds; Theoretical and Applied Genetics; 86; 1993; 694-698. * |
| Churchill DB, et al., Rotating Table for Measuring Seed Physical Properties, Transactions of the ASAE, vol. 34(4), pp. 1842-1845 (1991). |
| Churchill F, et al. William Johannsen and the Genotype Concept, Journal of the History of Biology, vol. 7, No. 1, pp. 5-30 (1974). |
| Concibido VC, et al. Introgression of a quantitative trait locus for yield from Glycine soja into commercial soybean cultivars, Theor Appl Genet, vol. 106, pp. 575-582 (2003). |
| Dekkers JCM, et al. The use of molecular genetics in the improvement of agricultural populations, Macmillian Magazines Ltd, vol. 3 (2002). |
| Eder J, et al. In vivo haploid induction in maize, Theor Appl Genet, vol. 104, No. 4, pp. 703-708 (2002). |
| Frisch M, et al. Comparison of Selection Strategies for Marker-Assisted Backcrossing of a Gene, Crop Science, vol. 39, pp. 1295-1301 (1999). |
| Gasvoda D, et al., Whitebark Pine Seed Scarifier, Timber Tech Tips, USDA Forest Service (2002). |
| Gordon et al., Identification of Fourier transform infrared photoacoustic spectral features for detection of Aspergillus flavus infection in corn; Internation Journal of Food Microbiology; 35; 1997; 179-186. * |
| Groos C, et al. Study of the relationship between pre-harvest sprouting and grain color by quantitaive trait loci analysis in a whitexred grain bread-wheat cross, Theor Appl Genet, vol. 104, pp. 39-47 (2002). |
| Hahnen S, et al. DNA Preparation from Plant Tissues with the MagNA Pure LC System, Biochemica, No. 4, 2001 (Roche Online). |
| Hahnen S, et al., Automated DNA Preparation from Maize Tissues and Food Samples Suitable for Real-time PCR Detection of Native Genes, European Food Research Technology, vol. 215, pp. 443-446 (2002). |
| He L, et al. A 384-Well Microtiter-Plate-Based Template Preparation and Sequencing Method, PCR Cloning Protocols, pp. 411-416, 2nd ed., Humana Press 2002. |
| Henry, R.J., "Plant Genotyping : the DNA Fingerprinting of Plants," 2001. |
| Higley PM, et al. Effects of Non-Destructive Tissue Extraction on the Viability of Corn, Soybeans, and Bean Seeds, Seed Sci. & Technol., vol. 22, pp. 245-252 (1994). |
| Hill-Ambroz KL, et al. Modified rapid DNA extraction protocol for high throughput microsatellite analysis in wheat, Crop Sci., vol. 42, pp. 2088-2091 (2002). |
| Horigane A, et al. Evaluation of Color Characteristics of Cross-Sectioned Wheat Kernels, Food Sci. Technol. Res., vol. 9, pp. 327-331 (2003). |
| Horigane A, et al. Two-dimensional analysis of kernels using a new sample preparation method, Chemistry and Biology, vol. 41, No. 6, pp. 398-102 (2003). |
| Horigane A, et al., Measurement of brightness of cross-sectioned wheat kernels, Japanese Journal of Crop Science, vol. 72, pp. 176-177 (2003). |
| Jones DA, et al. An analysis of seed development in Pisum sativumL. XVI. Assessing variation for fatty-acid content by use of a non-destructive technique for single-seed analysis, Plant Breeding, vol. 114, No. 1, pp. 81-83 (1995). |
| Kamiya M, et al. Rapid DNA Extraction Method from Soybean Seeds, Breeding Science, vol. 53, pp. 277-279 (2003). |
| Kang HW, et al., A Rapid DNA Extraction Method for RFLP and PCR Analysis from a Single Dry Seed Plant, Molecular Biology Reporter, vol. 16, No. 90 (1998). |
| Kato A, et al. Chromosome doubling of haploid maize seedlings using nitrous oxide gas at the flower primordial stage, Plant Breeding, vol. 121, pp. 370-377 (2002). |
| Kerk NM, et al., Laser Capture Microdissection of Cells from Plant Tissues, Plant Physiology, vol. 132, pp. 27-35 (May 2003). |
| Kisha TJ, et al. Genetic Diversity among Soybean Plant Introductions and North American Germplasm, Crop Science, vol. 38, pp. 1669-1680 (1998). |
| Krysan P. Ice-Cap. A high-throughput method for capturing plant tissue samples for genotype analysis, Plant Physiol, vol. 135, No. 3, pp. 1162-1169 (2004). |
| Lipman, et al. Tolerance of Liquid-Air Temperature By Seeds of Higher Plants for Sixty Days, Plant Physiology, vol. 9, No. 2, pp. 392-394 (1934). |
| Liu W, et al., Highly Efficient Doubled-Haploid Production in Wheat via Induced Microsphere Embryogenesis, Crop Science, vol. 42, pp. 686-692 (2002). |
| McCarthy PL, et al. Rapid identification of transformed wheat using a half-seed PCR assay, Biotechniques, vol. 32, No. 3, pp. 560, 562-564 (2002). |
| Meksem, et al. Automated Marker Assisted Selection for DUAL Resistance: The Soybean Cyst Nematode and Fusarium Solani, Plant and Animal Genome VII Conference, Jan. 17-19, (1999). |
| Pearson TC, et al., Reduction of Aflatoxin and Fumonisin Contamination in Yellow Corn by High-Speed Dual-Wavelength Sorting, Cereal Chemistry, vol. 81, No. 4 (2004). |
| Peterhansel C, et al., Quantitative Detection of Transgenic and Endogenous DNA Sequences In Seeds After Automater DNA Preparation, Biomedical Engineering Applications, Basis & Communications, vol. 16, No. 1 (2004). |
| Rafalski JA, et al. Genetic diagnostics in plant breeding: RAPDs, microsatellites and machines, Trends Genet, vol. 9, No. 8, pp. 275-280 (1993). |
| Sangtong V, et al., Serial Extraction of Endosperm Drillings (SEED) A Method for Detecting Transgenes and Proteins in Single Viable Maize Kernels, Plant Molecular Biology Reporter, vol. 19, pp. 151-158 (2001). |
| Skinner DZ, et al., Segregation and conditional probability association of molecular markers with traits in autotetraploid alfalfa, Molecular Breeding, vol. 6, pp. 295-306 (2000). |
| Smith JSC, et al., Genetic purity and testing technologies for seed quality: a company perspective, Seed Science Research, vol. 8, pp. 285-293 (1998). |
| Sweeney P, et al., Random Amplified Polymorphic DNA Analysis of Dry Turfgrass Seed, HortScience, vol. 31, pp. 400-401 (1996). |
| Tanksley, S.D., RFLP Mapping Plants Breeding: Tools for and Old Science, Nature Biotechnology, vol. 7 (Mar. 1989). |
| Turner NA, et al., Sampling and Analysis for Determining Relationship of Calcium Concentration to Bitter Pit in Apple Fruit, New Zealand Journal of Agricultural Research, vol. No. 4, pp. 525-532 (1977). |
| von Post R, et al., A High-Throughput DNA Extraction Method from Barley Seed, Euphytica, vol. 130, pp. 255-260 (2003). |
| Wang GL, et al. PCR amplification from single seeds, facilitating DNA marker-assisted breeding, Nucleic Acids Research, vol. 21, No. 10 (1993). |
| Wang, J., et al., "Identification of parents of F1 hybrids through SSR profiling of maternal and hybrid tissue," Euphytica, 24:29-34, 2002. |
| Wenxue, Zhai et al., "PCR Analysis of Half-Seeds of Cereal Crops and Its Application in Marker-assisted Selection and Breeding", Chinese Journal of Biotechnology, vol. 12, No. 4, 1996. |
| Wright H. Commercial Hybrid Seed Production, Hybridization of Crop Plants, pp. 161-176 (1980). |
| Xin Z, et al. A High-Throughput DNA Extraction Method from Barley Seed, BioTechniques, vol. 34, pp. 820-826 (2003). |
| Xu Y, Developing Marker-Assisted Selection Strategies for Breeding Hybrid Rice, RiceTec, Inc. (2003). |
| Yao Y, et al., Single Kernel Sampling Method for Maize Starch Analysis While Maintaining Kernel Vitality, Cereal Chemistry, vol. 79, No. 6, pp. 757-762 (Nov. 2002). |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150314335A1 (en) * | 2014-05-02 | 2015-11-05 | The Quaker Oats Company | Method and System for Producing Reduced Gluten Oat Mixture |
| US9364866B2 (en) * | 2014-05-02 | 2016-06-14 | The Quaker Oats Company | Method and system for producing reduced gluten oat mixture |
| US11298723B2 (en) | 2016-06-29 | 2022-04-12 | BASF Agricultural Solutions Seed US LLC | Methods and systems for sorting cottonseed |
| US11911802B2 (en) | 2016-06-29 | 2024-02-27 | BASF Agricultural Solutions Seed US LLC | Methods and systems for sorting cottonseed |
| US11925943B2 (en) | 2020-03-25 | 2024-03-12 | Crown Iron Works Company | Hydraulic shell-seed separator |
Also Published As
| Publication number | Publication date |
|---|---|
| US7905050B2 (en) | 2011-03-15 |
| US20080035532A1 (en) | 2008-02-14 |
| US20080179226A1 (en) | 2008-07-31 |
| US20040118754A1 (en) | 2004-06-24 |
| US20020144458A1 (en) | 2002-10-10 |
| US7591374B2 (en) | 2009-09-22 |
| US6706989B2 (en) | 2004-03-16 |
| US7588151B2 (en) | 2009-09-15 |
| US20080034652A1 (en) | 2008-02-14 |
| US7290665B2 (en) | 2007-11-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| USRE45489E1 (en) | Automated high-throughput seed sample handling system and method | |
| US8943785B2 (en) | Automated high-throughput seed processing apparatus | |
| US9156064B2 (en) | Apparatus and method for sorting plant material | |
| US10746632B2 (en) | Automated plant product sampler | |
| CA2480937C (en) | Automated picking, weighing and sorting system for particulate matter | |
| US20220217896A1 (en) | High throughput cassette filler | |
| US8511226B2 (en) | Pepper de-stemming methods and apparatus | |
| US9891145B1 (en) | Cotton sampling system | |
| US11672270B2 (en) | Pepper de-stemming methods and apparatus | |
| US20050060958A1 (en) | Seed handling systems and methods | |
| JP4402915B2 (en) | Grain sorting device | |
| EP2467007B1 (en) | Automated high-throughput seed processing apparatus and method | |
| WO2022182226A1 (en) | Apparatus and method for automatically sorting, counting and marking oil palm seeds | |
| JP2008528403A (en) | Apparatus and method for controlling weight and grouping products into lots | |
| KR200360367Y1 (en) | Auto citrus fruits sorting equipment | |
| JPH09224573A (en) | Method and device for evaluating quality of raw tea leaf | |
| JP7432151B2 (en) | Self-testing device and self-testing method | |
| KR20240102655A (en) | Bean sorting and counting device | |
| WO2013103449A1 (en) | System and method for automated inspecting and sorting of agricultural products | |
| AU2004205288A1 (en) | Seed Handling Systems and Methods |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MAFP | Maintenance fee payment |
Free format text: PAYMENT OF MAINTENANCE FEE, 8TH YEAR, LARGE ENTITY (ORIGINAL EVENT CODE: M1552); ENTITY STATUS OF PATENT OWNER: LARGE ENTITY Year of fee payment: 8 |
|
| FEPP | Fee payment procedure |
Free format text: MAINTENANCE FEE REMINDER MAILED (ORIGINAL EVENT CODE: REM.); ENTITY STATUS OF PATENT OWNER: LARGE ENTITY |