RU2776663C1 - Method for simulation of echoes of moving target in detection zone of tested radar station - Google Patents
Method for simulation of echoes of moving target in detection zone of tested radar station Download PDFInfo
- Publication number
- RU2776663C1 RU2776663C1 RU2022100732A RU2022100732A RU2776663C1 RU 2776663 C1 RU2776663 C1 RU 2776663C1 RU 2022100732 A RU2022100732 A RU 2022100732A RU 2022100732 A RU2022100732 A RU 2022100732A RU 2776663 C1 RU2776663 C1 RU 2776663C1
- Authority
- RU
- Russia
- Prior art keywords
- signal
- radar
- uav
- tested radar
- simulated
- Prior art date
Links
- 238000001514 detection method Methods 0.000 title abstract 4
- 238000004088 simulation Methods 0.000 title abstract 3
- 230000000875 corresponding Effects 0.000 abstract 4
- 238000002592 echocardiography Methods 0.000 abstract 1
- 230000000694 effects Effects 0.000 abstract 1
- 238000001914 filtration Methods 0.000 abstract 1
- 230000036039 immunity Effects 0.000 abstract 1
- 230000000051 modifying Effects 0.000 abstract 1
- 238000001228 spectrum Methods 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
Images









Abstract
Description
1. Область техники, к которой относится изобретение1. Technical field to which the invention belongs
Изобретение относится к радиолокации и может быть использовано для упрощения, сокращения времени и стоимости проведения тестирования РЛС, размещенной на реальной позиции, по обнаружению, сопровождению и распознаванию целей, а также по помехозащищенности.The invention relates to radar and can be used to simplify, reduce the time and cost of testing a radar located at a real position for detection, tracking and recognition of targets, as well as for noise immunity.
2. Уровень техники2. State of the art
Известен способ испытаний РЛС [Леонов А.И., Леонов С.А., Нагулинко Ф.В. Испытания РЛС. Оценка характеристик. - М.: Радио и связь. 1990, с. 3, с. 25], включающий создание натурной сигнально-помеховой радиолокационной обстановки с использованием целей и постановщиков помех, пускаемых по заданным траекториям, обнаружение, захват и сопровождение целей, статистическую обработку измеренных параметров траекторий целей.A known method of testing the radar [Leonov A.I., Leonov S.A., Nagulinko F.V. Radar testing. Performance evaluation. - M.: Radio and communications. 1990, p. 3, p. 25], including the creation of a full-scale signal-interference radar environment using targets and jammers launched along specified trajectories, detection, capture and tracking of targets, statistical processing of the measured parameters of target trajectories.
Недостатком данного способа являются значительное количество технических средств, требуемых для проведения испытаний, а следовательно, и его высокая стоимость. Это объясняется тем, что испытание такого сложного устройства как РЛС связано с целым рядом дорогостоящих организационных и технических мероприятий, включающих обеспечение полетов целей (самолетов, вертолетов, ракет и других объектов различных классов и назначения) в зоне обзора РЛС по заданным траекториям, привлечение специальных постановщиков помех, аппаратуры регистрации измерений и оценки результатов испытания.The disadvantage of this method is a significant amount of hardware required for testing, and hence its high cost. This is explained by the fact that the testing of such a complex device as a radar station is associated with a number of expensive organizational and technical measures, including the provision of flights of targets (aircraft, helicopters, missiles and other objects of various classes and purposes) in the radar field of view along specified trajectories, the involvement of special directors interference, equipment for recording measurements and evaluating test results.
Известен имитационно-испытательный комплекс для радиолокационной станции [Патент РФ RU №2533779С2, опубл.20.03.2014 г., Имитационно-испытательный комплекс для радиолокационной станции, МПК G01S 7/40], содержащий цель для создания натурной обстановки в зоне обзора по заданной программе облета, на борту которой установлены подключенная к спутниковой навигационной системе пилотажно-навигационная система и измерительное радиоэлектронное устройство, связанные с пунктом управления. Цель для создания натурной обстановки в зоне обзора по заданной программе облета выполнена в виде беспилотного летательного аппарата (БЛА) с крылом, оперением, фюзеляжем, двигателем и устройством посадки, снабженного пусковой установкой, на направляющей которой установлены толкатель и сбоку со стороны винта двигателя убираемый выдвижной стартер. На фюзеляже в нижней его части по продольной оси закреплен упор, контактирующий при взлете с торцевой поверхностью толкателя, а устройство посадки установлено в отсеке, на стенке которого закреплена открывающаяся створка, соединенная с автоматическим замком.A simulation and test complex for a radar station is known [RF Patent RU No. 2533779C2, publ. overflight, on board which is installed a flight navigation system connected to a satellite navigation system and a measuring radio-electronic device associated with a control point. The target for creating a natural environment in the field of view according to a given flight program is made in the form of an unmanned aerial vehicle (UAV) with a wing, empennage, fuselage, an engine and a landing device, equipped with a launcher, on the guide of which a pusher is installed and on the side of the engine propeller a retractable retractable starter. A stop is fixed on the fuselage in its lower part along the longitudinal axis, which contacts the end surface of the pusher during takeoff, and the landing device is installed in the compartment, on the wall of which an opening flap connected to an automatic lock is fixed.
Недостатком данного имитационно-испытательного комплекса для радиолокационной станции является ограничение по дальности и скорости имитируемой цели, которые обусловлены возможностями БЛА.The disadvantage of this simulation and test complex for a radar station is the limitation on the range and speed of the simulated target, which are due to the capabilities of the UAV.
Известна система проверки и испытаний средств противовоздушной обороны [Патент РФ RU №109870 U1, опубл. 27.10.2011 г., Система проверки и испытаний средств противовоздушной обороны, МПК G01S 7/40], содержащая воздушную цель с устройством управления, радиолокационную станцию обнаружения и станцию захвата и сопровождения цели, устройство регистрации параметров обнаружения и сопровождения цели, причем воздушная цель выполнена в виде БЛА с изменяемой эффективной площадью рассеивания (ЭПР).A known system for checking and testing air defense means [RF Patent RU No. 109870 U1, publ. 10/27/2011, System for checking and testing air defense means, IPC
Недостатком известного устройства является ограничение по дальности и скорости имитируемой цели, которые обусловлены возможностями БЛА.The disadvantage of the known device is the limitation on the range and speed of the simulated target, which are due to the capabilities of the UAV.
Известен имитатор движущейся цели [Патент США №6067041, опубл. 23.05.2000 г., Moving target simulator, МПК G01S 7/40], содержащий радиоприемник, цифровую память, обеспечивающую требуемую задержку принятого радиосигнала, амплитудный модулятор, допплеровский модулятор, синтезатор частот, смесители, усилители, контроллер управления процессом задержки и модуляции имитируемого сигнала и управляющий персональный компьютер. Сущность использования известного устройства для тестирования РЛС заключается в следующем. Имитатор движущейся цели размещается неподалеку от тестируемой РЛС и принимает излучаемые ею сигналы. Принятые сигналы преобразуются на промежуточную частоту, задерживаются на время, соответствующее дальности до имитируемой цели, модулируются по амплитуде в соответствии с дальностью до цели и ее ЭПР, модулируются по допплеровской частоте в соответствии со скоростью движения имитируемой цели, преобразуются на несущую частоту РЛС и излучаются в ее сторону.Known simulator of a moving target [US Patent No. 6067041, publ. 05/23/2000, Moving target simulator, MPK G01S 7/40], containing a radio receiver, a digital memory that provides the required delay of the received radio signal, an amplitude modulator, a Doppler modulator, a frequency synthesizer, mixers, amplifiers, a controller for controlling the process of delay and modulation of the simulated signal and a control personal computer. The essence of using a known device for testing the radar is as follows. A moving target simulator is placed close to the radar under test and receives the signals emitted by it. The received signals are converted to an intermediate frequency, delayed by a time corresponding to the range to the simulated target, modulated in amplitude in accordance with the range to the target and its RCS, modulated in Doppler frequency in accordance with the speed of the simulated target, converted to the carrier frequency of the radar and radiated to her side.
Недостатком известного устройства является невозможность имитации угловых перемещений цели, а следовательно, и невозможность оценить всю зону обзора тестируемой РЛС, а также невозможность имитации поляризационных свойств имитируемых эхосигналов.The disadvantage of the known device is the impossibility of simulating the angular displacements of the target, and hence the impossibility to evaluate the entire field of view of the tested radar, as well as the impossibility of simulating the polarization properties of the simulated echo signals.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому способу является выбранный в качестве прототипа способ имитации радиолокационного сигнала цели моноимпульсной радиолокационной станции [Патент РФ RU 2391682 С1, опубл. 10.06.2010 г., Способ имитации радиолокационного сигнала цели моноимпульсной радиолокационной станции, МПК G01S 7/40 (2006.01)]. Способ заключается в том, что имитатор принимает сигналы, излучаемые тестируемой РЛС, преобразует их на промежуточную частоту, модулирует в соответствии со скоростью движения имитируемой цели, ее дальностью и ЭПР, переносит их спектр на несущую частоту тестируемой РЛС и излучает их в ее направлении двумя антеннами, находящимися на дуге окружности с центром, совпадающим с антенной тестируемой РЛС. Соотношение мощностей, излучаемых парой пространственно разнесенных антенн, определяет текущее угловое положение цели.The closest in technical essence and the achieved result to the proposed method is the method chosen as a prototype for simulating the radar signal of the target of a monopulse radar station [RF Patent RU 2391682 C1, publ. 06/10/2010, Method for simulating the radar signal of the target of a monopulse radar station, IPC G01S 7/40 (2006.01)]. The method consists in the fact that the simulator receives signals emitted by the tested radar, converts them to an intermediate frequency, modulates them in accordance with the speed of the simulated target, its range and EPR, transfers their spectrum to the carrier frequency of the tested radar and radiates them in its direction with two antennas located on an arc of a circle with a center coinciding with the antenna of the tested radar. The ratio of the powers radiated by a pair of spatially separated antennas determines the current angular position of the target.
Недостатком данного способа имитации является ограниченность углового сектора имитации радиолокационного сигнала, сложность его использования при тестировании РЛС, размещенной на реальной позиции, а также невозможность имитации поляризационных свойств имитируемых эхосигналов, соответствующих характеристикам реальных движущихся целей.The disadvantage of this simulation method is the limited angular sector of the radar signal simulation, the complexity of its use when testing a radar located at a real position, and the impossibility of simulating the polarization properties of simulated echo signals corresponding to the characteristics of real moving targets.
3. Раскрытие изобретения3. Disclosure of the invention
Задачей изобретения, на решение которой направлено заявляемое изобретение, является разработка нового способа формирования требуемой (заданной) сигнально-помеховой обстановки путем излучения с борта БЛА имитируемых эхосигналов или помех, соответствующих по своим энергетическим, спектральным, корреляционным, поляризационным и траекторным параметрам эхосигналам реальных движущихся целей или сигналам помехопостановщиков в интересах тестирования РЛС, обеспечивающего достижение следующего технического результата: получение возможности имитации эхосигналов или помех, излучаемых с БЛА и соответствующих реальным энергетическим, спектральным, корреляционным, поляризационным и траекторным параметрам движущихся аэродинамических или баллистических целей, или помехопостановщиков, совершающих полет в зоне обнаружения тестируемой РЛС, размещенной на реальной позиции, и за счет этого сокращение времени и стоимости проведения ее тестирования в части оценки возможностей по обнаружению, сопровождению и распознаванию реальных движущихся целей, а также помехозащищенности.The objective of the invention, to which the claimed invention is directed, is the development of a new method for generating the required (given) signal-interference environment by emitting simulated echo signals or interference from the UAV, corresponding in their energy, spectral, correlation, polarization and trajectory parameters to the echo signals of real moving targets or signals of jammers in the interests of testing the radar, which ensures the achievement of the following technical result: obtaining the possibility of simulating echo signals or interference emitted from UAVs and corresponding to real energy, spectral, correlation, polarization and trajectory parameters of moving aerodynamic or ballistic targets, or jammers flying in the zone detection of a tested radar located at a real position, and thereby reducing the time and cost of testing it in terms of assessing the capabilities for detection, tracking and recognition of real moving targets, as well as noise immunity.
Поставленная задача решается, а требуемый технический результат при использовании изобретения достигается тем, что в способе имитации эхосигналов движущейся цели, заключающемся в том, что в имитаторе принимают зондирующие сверхвысокочастотные (СВЧ) сигналы тестируемой РЛС, ограничивают их амплитуду аттенюатором, усиливают в усилителе высокой частоты (УВЧ), преобразуют на промежуточную частоту (ПЧ), дополнительно преобразованные на ПЧ сигналы подвергают согласованной фильтрации в N фильтрах, где импульсная характеристика определенного фильтра соответствуют определенному варианту модуляции зондирующего СВЧ сигнала тестируемой РЛС, детектируют выделенные на выходах фильтров сигналы, сравнивают их с порогом, определяют тип зондирующего СВЧ сигнала тестируемой РЛС, выбирая максимальный из сигналов, превысивших порог, формируют сигнал на ПЧ с модуляцией, соответствующей импульсной характеристике фильтра, в котором был выделен максимальный сигнал, с задержкой относительно зондирующего сигнала тестируемой РЛС, соответствующей расстоянию между имитатором и имитируемой движущейся целью, со сдвигом несущей частоты на величину доплеровского смещения, определяемого радиальной скоростью имитируемой цели, и с амплитудной модуляцией, соответствующей дальности до имитируемой цели, ее ЭПР и случайным флюктуациям, характерным для данного типа имитируемой цели, преобразуют сформированный сигнал на несущую частоту тестируемой РЛС, разделяют сформированный СВЧ сигнал на две составляющих, сдвигают по фазе одну составляющую СВЧ сигнала на угол π/2, регулируют амплитуду каждой составляющей так, чтобы обеспечить излучение СВЧ сигнала с заданной поляризацией, подают одну составляющую на первый вход-выход, а другую составляющую - на второй вход-выход двухвходовой приемо-передающей антенны, ориентированной в направлении тестируемой РЛС, и излучают с поляризацией, соответствующей поляризации эхосигнала имитируемой цели, причем имитатор размещают на БЛА, оснащенном пилотажно-навигационной системой, обеспечивающей его полет в дальней зоне антенны тестируемой РЛС с перемещениями за время полета в азимутально-угломестной плоскости, аналогичными перемещениям имитируемой цели, а по дальности и со скоростью - с уменьшенными в К раз значениями дальности и скорости полета имитируемой цели, где значение К выбирается, исходя из возможностей БЛА по высоте и скорости его полета.The problem is solved, and the required technical result when using the invention is achieved by the fact that in the method of simulating the echo signals of a moving target, which consists in the fact that the simulator receives probing microwave signals of the tested radar, limit their amplitude with an attenuator, amplify in a high frequency amplifier ( UHF), are converted to an intermediate frequency (IF), the signals additionally converted to IF are subjected to matched filtering in N filters, where the impulse response of a certain filter corresponds to a certain modulation variant of the probing microwave signal of the radar under test, the signals extracted at the filter outputs are detected, they are compared with a threshold, determine the type of probing microwave signal of the tested radar, choosing the maximum of the signals that exceeded the threshold, form a signal on the IF with modulation corresponding to the impulse response of the filter in which the maximum signal was selected, with a delay relative to the probing signal of the radar under test, corresponding to the distance between the simulator and the simulated moving target, with a carrier frequency shift by the Doppler shift value determined by the radial velocity of the simulated target, and with amplitude modulation corresponding to the range to the simulated target, its RCS and random fluctuations characteristic of this type of simulated target , convert the generated signal to the carrier frequency of the tested radar, separate the generated microwave signal into two components, phase-shift one component of the microwave signal by an angle π/2, adjust the amplitude of each component so as to ensure the radiation of the microwave signal with a given polarization, apply one component to the first input-output, and the other component - to the second input-output of the two-input receiving-transmitting antenna, oriented in the direction of the tested radar, and radiate with polarization corresponding to the polarization of the echo signal of the simulated target, and the simulator is placed on a UAV equipped with a flight navigation system th, ensuring its flight in the far zone of the tested radar antenna with movements during the flight in the azimuth-elevation plane, similar to the movements of the simulated target, and in range and speed - with the range and speed of the flight of the simulated target reduced by a factor of K, where the value of K is selected based on the capabilities of the UAV in terms of height and speed of its flight.
Сопоставительный анализ с прототипом показывает, что предложенный способ обладает другими существенными, новыми отличительными от прототипа признаками. Новыми отличительными признаками заявляемого способа являются:Comparative analysis with the prototype shows that the proposed method has other significant new distinctive features from the prototype. The new distinguishing features of the proposed method are:
- размещение имитатора эхосигналов цели на БЛА, совершающим полет в дальней зоне антенны тестируемой РЛС, с перемещениями за время полета в азимутально-угломестной плоскости, аналогичными перемещениям имитируемой цели, а по дальности и со скоростью - с уменьшенными в К раз значениями дальности и скорости полета имитируемой цели, где значение К выбирается, исходя из возможностей БЛА по высоте и скорости его полета;- placement of a target echo simulator on a UAV flying in the far zone of the antenna of the tested radar, with movements during the flight in the azimuth-elevation plane, similar to the movements of the simulated target, and in range and speed - with the range and speed of flight reduced by K times a simulated target, where the value of K is selected based on the capabilities of the UAV in terms of height and speed of its flight;
- определение типа зондирующего СВЧ сигнала тестируемой РЛС;- determination of the type of probing microwave signal of the tested radar;
- излучение имитатором имитируемых эхосигналов с поляризацией, соответствующей поляризации зондирующего сигнала тестируемой РЛС и отражательным свойствам имитируемой цели.- radiation by the simulator of simulated echo signals with a polarization corresponding to the polarization of the probing signal of the tested radar and the reflective properties of the simulated target.
Отличительные признаки являются существенными, так как каждый из них необходим, а все вместе достаточны для достижения поставленной задачи, на решение которой направлено заявляемое изобретение.Distinctive features are essential, since each of them is necessary, and all together they are sufficient to achieve the task, the solution of which is directed by the claimed invention.
4. Пояснения к графическим материалам4. Explanations for graphic materials
На фиг. 1 приведена схема устройства для реализации способа, где приняты следующие обозначения:In FIG. 1 shows a diagram of a device for implementing the method, where the following designations are accepted:
1 - двухвходовая приемо-передающая антенна (ППА); 2 - первый антенный переключатель (АП); 3 - второй АП; 4 - входной фазовращатель (ФВ); 5 - сумматор; 6 - аттенюатор; 7 - входной усилитель высокой частоты (УВЧ); 8 - входной смеситель; 9 - входной усилитель промежуточной частоты (УПЧ); 10 - блок демодуляции; 11 - цифровой сигнальный процессор (ЦСП); 12 - первый гетеродин; 13 - второй гетеродин; 14 - устройство управления и регистрации параметров полета (УУ и РПП); 15 - формирователь сигналов (ФС); 16 - блок модуляции; 17 - выходной смеситель; 18 - делитель; 19 - выходной ФВ; 20 - первый выходной УВЧ; 21 - второй выходной УВЧ; 22 - первый управляемый аттенюатор; 23 - второй управляемый аттенюатор; 24 - пилотажно-навигационная система (ПНС); 25 - наземное устройство управления (УУ); 26 - гиростабилизированная платформа (ГСП); 27 - БЛА; 28 - тестируемая РЛС.1 - two-input receiving-transmitting antenna (PTA); 2 - the first antenna switch (AP); 3 - second AP; 4 - input phase shifter (PV); 5 - adder; 6 - attenuator; 7 - high frequency input amplifier (UHF); 8 - inlet mixer; 9 - input intermediate frequency amplifier (IFA); 10 - demodulation block; 11 - digital signal processor (DSP); 12 - the first local oscillator; 13 - second local oscillator; 14 - device for controlling and recording flight parameters (CU and RPP); 15 - signal shaper (FS); 16 - modulation block; 17 - outlet mixer; 18 - divider; 19 - output PV; 20 - the first output UHF; 21 - second output UHF; 22 - the first controlled attenuator; 23 - second controlled attenuator; 24 - flight and navigation system (PNS); 25 - ground control device (CU); 26 - gyro-stabilized platform (GSP); 27 - UAV; 28 - tested radar.
При этом вход-выход 1 ППА 1, которая размещается на ГСП 26, соединен с входом-выходом 1 первого АП 2, вход 2 которого соединен с выходом первого управляемого аттенюатора 22, а выход 3 соединен с входом 2 сумматора 5, вход-выход 2 ППА 1 соединен с входом-выходом 1 второго АП 3, вход 2 которого соединен с выходом второго управляемого аттенюатора 23, а выход 3 соединен с входом входного фазовращателя 4, выход которого соединен с входом 1 сумматора 5, выход которого соединен с входом аттенюатора 6, выход которого соединен с входом входного УВЧ 7, выход которого соединен с входом 1 входного смесителя 8, вход 2 которого соединен с выходом 1 первого гетеродина 12, а выход соединен с входом УПЧ 9, выход которого соединен с входом 1 блока демодуляции 10, вход 2 которого соединен с выходом второго гетеродина 13, а выходы 1 и 2 соединены соответственно с входами 1 и 2 ЦСП 11, выход которого соединен с входом 1 УУ и РПП 14, вход 2 которого соединен с выходом ПНС 24, а выход 1 соединен с входом 1 первого управляемого аттенюатора 22, выход 2-е входом 1 второго управляемого аттенюатора 23, а выход 3-е входом ФС 15, выходы 1 и 2 которого соединены соответственно с входами 1 и 2 блока модуляции 16, выход которого соединен с входом 1 выходного смесителя 17, вход 2 которого соединен с выходом 2 первого гетеродина 12, а выход соединен с входом делителя 18, выход 1 которого соединен с входом первого выходного УВЧ 20, а выход 2 соединен с входом выходного фазовращателя 19, выход которого соединен с входом второго выходного УВЧ 21, выход которого соединен с входом 2 второго управляемого аттенюатора 23, выход которого соединен с входом 2 второго АП 3, связь ПНС 24 с наземным УУ 25, а также связь ППА 1 с РЛС 28 осуществляется по эфиру. При этом устройства 1-24 и 26 размещаются на БЛА 27.In this case, the input-output 1 of the PPA 1, which is located on the GSP 26, is connected to the input-output 1 of the first AP 2, the input 2 of which is connected to the output of the first controlled attenuator 22, and the output 3 is connected to the input 2 of the adder 5, input-output 2 PPA 1 is connected to the input-output 1 of the second AP 3, the input 2 of which is connected to the output of the second controlled attenuator 23, and the output 3 is connected to the input of the input phase shifter 4, the output of which is connected to the input 1 of the adder 5, the output of which is connected to the input of the attenuator 6, the output of which is connected to the input of the input UHF 7, the output of which is connected to the input 1 of the input mixer 8, the input 2 of which is connected to the output 1 of the first local oscillator 12, and the output is connected to the input of the booster 9, the output of which is connected to the input 1 of the demodulation unit 10, input 2 which is connected to the output of the second local oscillator 13, and the outputs 1 and 2 are connected respectively to the inputs 1 and 2 of the DSP 11, the output of which is connected to the input 1 of the CU and RPP 14, the input 2 of which is connected to the output of the PNS 24, and the output 1 is connected to the input 1 P the first controlled attenuator 22, the output 2 is the input 1 of the second controlled attenuator 23, and the output 3 is the input of the FS 15, the outputs 1 and 2 of which are connected respectively to the inputs 1 and 2 of the modulation block 16, the output of which is connected to the input 1 of the output mixer 17 , the input 2 of which is connected to the output 2 of the first local oscillator 12, and the output is connected to the input of the divider 18, the output 1 of which is connected to the input of the first output UHF 20, and the output 2 is connected to the input of the output phase shifter 19, the output of which is connected to the input of the second output UHF 21 , the output of which is connected to the input 2 of the second controlled attenuator 23, the output of which is connected to the input 2 of the second AP 3, the connection of the PNS 24 with the ground control unit 25, as well as the connection of the PPA 1 with the radar 28 is carried out over the air. When this device 1-24 and 26 are placed on the
На фиг. 2 поясняется расчет угла места имитируемой АДЦ и БЛА 27, а также и высоты полета БЛА 27 с использованием теоремы косинусов.In FIG. 2 explains the calculation of the elevation angle of the simulated ADC and the
На фиг. 3 приведен результат расчета угла места имитируемой траектории АДЦ в зависимости от дальности до нее при высоте фазового центра антенны тестируемой РЛС 28. Нз=10 м и полете имитируемой АДЦ на высоте Hmax=10000 м.In FIG. Figure 3 shows the result of calculating the elevation angle of the simulated ADC trajectory depending on the distance to it at the height of the phase center of the antenna of the tested
На фиг. 4 приведен результат расчета траекторий БЛА 27 в плоскости «дальность-высота», используемый для оценки масштабирующего коэффициента К снизу.In FIG. 4 shows the result of calculating the trajectories of the
На фиг. 5 поясняется связь координат XT, YT, ZT топоцентрической прямоугольной системы координат (СК) с координатами D, Az, В сферической СК. Топоцентрическая прямоугольная СК - это прямоугольная СК с началом в фазовом центре антенны тестируемой РЛС 28, где ось 0YT направлена в зенит по местной нормали к поверхности Земли, оси 0ХT и 0ZT лежат в плоскости местного горизонта и вместе с осью 0YT образуют правую СК, причем, ось 0ZT лежит в плоскости нормали к антенному полотну/электрической оси антенны. Здесь А3 - азимут оси OZT, который отсчитывается в плоскости местного горизонта от направления на север по часовой стрелке.In FIG. 5 explains the relation of the coordinates X T , Y T , Z T of the topocentric rectangular coordinate system (CS) with the coordinates D, Az, B of the spherical CS. Topocentric rectangular SC is a rectangular SC with the beginning in the phase center of the antenna of the tested
На фиг. 6 поясняется связь координат ХГ, Yг, ZГ геоцентрической СК с топоцентрической прямоугольной СК. Геоцентрическая СК - это прямоугольная СК с началом в центре Земли, где ось OZГ направлена по оси вращения Земли на север, ось ОХГ лежит в плоскости экватора и проходит через нулевой меридиан, ось ОYГ лежит в плоскости экватора и дополняет СК до правой. Здесь же приведена геоцентрическая СК ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
На фиг. 7 поясняется связь геодезической СК с плоскостными координатами Гаусса-Крюгера (показана одна из шестиградусных зон).In FIG. 7 explains the connection of the geodetic CS with the planar coordinates of Gauss-Kruger (one of the six-degree zones is shown).
На фиг. 8-13 иллюстрируются результаты моделирования ошибок позиционирования БЛА 27 для сферической СК.In FIG. 8-13 illustrate the results of modeling errors in the positioning of the
На фиг. 14 поясняется расчет времени задержки излучения имитируемого сигнала.In FIG. 14 explains the calculation of the emission delay time of the simulated signal.
Для реализации предлагаемого технического решения может быть использовано стандартное оборудование.To implement the proposed technical solution, standard equipment can be used.
ППА 1 может быть выполнена в виде турникетной антенны [И.Н. Григоров. Антенны. М.: Радиософт, 2003 г., стр. 152, рис. 13.1].
Первый АП 2 и второй АП 3 могут быть выполнены в виде полосковых циркуляторов низкого уровня мощности, например, ФПЦН2-15 [Циркуляторы низкого уровня мощности [Электронный ресурс]: URL: https://www.domen.ru/files/upload.pdf].The
Фазовращатели 4 и 19 могут быть выполнены в виде отрезков коаксиального кабеля соответствующей длины.
Сумматор 5 и делитель 18 могут быть выполнены в виде двухходовых сумматоров/делителей типа QPD2-30-3000-1-S [2-Way Power Dividers/Combiners [Электронный ресурс]: URL: https://www.qualwave.com/products/2-way-power-dividers-combiners.htm].
Аттенюатор 6 может быть выполнен в виде аттенюатора с ручным управлением типа 5-3-127-A-1-S-12V [Белов Л.А. Аттенюаторы СВЧ-сигналов // Электроника: НТБ. 2006 г., №2].The
УВЧ 7, 20 и 21 могут быть выполнены в виде малошумящих УВЧ типа ADCA3270 [Analog Devices. [Электронный ресурс]: URL: https://www.analog.com].
Смесители 8 и 17 могут быть выполнены в виде малошумного смесителя с двойным балансом типа LTC5510 [Analog Devices. [Электронный ресурс]: URL: https://www.analog.com].
УПЧ 9 может быть выполнен в виде усилителя типа ADL5541 [Analog Devices. [Электронный ресурс]: URL: https://www.analog.com].IF 9 can be made in the form of an amplifier type ADL5541 [Analog Devices. [Electronic resource]: URL: https://www.analog.com].
Блок демодуляции 10 может быть выполнен в виде квадратурного демодулятора с АЦП типа микросхемы AD6676 [Analog Devices. [Электронный ресурс]: URL: https://www.analog.com].The
ЦСП 11 может быть выполнен в виде высокопроизводительного цифрового сигнального процессора с обработкой смешанных сигналов типа ADSP-21991 [Analog Devices. [Электронный ресурс]: URL: https://www.analog.com].The
Гетеродины 12 и 13 могут быть выполнены в виде генераторов СВЧ типа HMC586LC4B [Analog Devices. [Электронный ресурс]: URL: https://www.ana-log.com].
УУ и РПП 14 может быть выполнено в виде микро-ЭВМ типа LP-174 [LP-174 User's manual. Edition 1.3, 2016. [Электронный ресурс]: URL: https://www.manualslib.com/download/1449575/Commell-Lp-174.htm].UU and
ФС 15 может быть выполнен в виде векторного генератора сигналов, способного формировать сигналы заданной амплитуды, формы и фазовой структуры, на заданной частоте и с требуемой временной задержкой, типа Agilent Е4438С [Контрольно-измерительные решения Agilent. США: каталог фирмы Agilent, 2014 г.].
Блок модуляции 16 может быть выполнен в виде цифрового квадратурного модулятора с интерполятором (на входе) и цифро-аналоговым преобразователем (на выходе) типа микросхемы AD9856 [Analog Devices. [Электронный ресурс]: URL: https://www.analog.com].The modulation unit 16 can be made in the form of a digital quadrature modulator with an interpolator (at the input) and a digital-to-analog converter (at the output) of the AD9856 chip type [Analog Devices. [Electronic resource]: URL: https://www.analog.com].
Управляемые аттенюаторы 22 и 23 могут быть выполнены в виде аттенюаторов с цифровым управлением типа НМС1119 [Analog Devices. [Электронный ресурс]: URL: https://www.analog.com].
ПНС 24 с наземным УУ 25 могут быть выполнены в виде пилотажно-навигационной системы транспортного летательного аппарата [Патент РФ RU 2597814 С1, Пилотажно-навигационная система транспортного летательного аппарата, МПК G01С 23/00 (2006.01), 2016 г.].
ГСП 26 может быть выполнена в виде гиростабилизированного подвеса требуемой грузоподъемности [Сайт-портал https://russiandrone.ru. [Электронный ресурс]: URL: https://russiandrone.ru/catalog/poleznaya-nagruzka/girostabilizirovannye-podvesy/girostabilizirovannye-platformy].
БЛА 27 может быть выполнен в виде БЛА [Патент РФ RU 2666493, Беспилотный летательный аппарат, МКП В64С 39/00, 2018 г.].
РЛС 28 может быть выполнена в виде РЛС типа П-18Р [Военно-техническая подготовка. Устройство РЛС РТВ ВВС.Радиолокационная станция П-18Р: учеб. в 2 ч. 4.1/ Е.Н. Гарин, Д.Д. Дмитриев, В.Н. Тяпкин и др.; ред. Е.Н. Гарин. - Красноярск: Сиб. федер. ун-т, 2012 г.].
5. Осуществление изобретения5. Implementation of the invention
Способ имитации эхосигналов движущейся цели реализуется следующим образом. Предварительно выбирается (рассчитывается) траектория аэродинамической или баллистической цели, эхосигнал которой будет имитироваться для тестирования РЛС.Точки этой траектории в геодезической СК должны быть внесены в память ПНС 24. На аттенюаторе 6 устанавливается затухание в соответствии с мощностью зондирующих сигналов тестируемой РЛС 28 и расстоянием между ней и БЛА 27. В память ЦСП 11 заносятся комплексные значения импульсных характеристик цифровых фильтров, являющихся копиями сигналов на промежуточной частоте, планируемых к использованию в тестируемой РЛС 28. Эти импульсные характеристики используются при выполнении алгоритма цифровой фильтрации, реализуемого в ЦСП 11 для определения типа зондирующего сигнала, излученного тестируемой РЛС 28 при очередном зондировании пространства. В память УУ и РПП 14 заносятся следующие данные:The method for simulating echo signals of a moving target is implemented as follows. The trajectory of an aerodynamic or ballistic target is preselected (calculated), the echo signal of which will be simulated for testing the radar. it and
- характеристики N планируемых к использованию в РЛС 28 зондирующих сигналов (длительность, рабочая частота, фазовая и частотная модуляция);- characteristics of
- характеристики имитируемой цели по всей траектории ее полета, а именно: дальность, ЭПР, доплеровская добавка частоты, амплитудно-временная модуляция, определяемая моделью флуктуаций эхосигналов, и поляризация эхосигнала.- characteristics of the simulated target along the entire trajectory of its flight, namely: range, EPR, Doppler frequency addition, amplitude-time modulation determined by the echo signal fluctuation model, and echo signal polarization.
Подбор координат точек траектории имитируемой цели проводится в сферической СК (см. фиг. 5), где:The selection of the coordinates of the points of the trajectory of the simulated target is carried out in a spherical SC (see Fig. 5), where:
дальность D фазового центра антенны РЛС 28 до точки траектории имитируемой цели определяется длиной радиус-вектора ![]()
![]()
азимут Az - есть угол, отсчитываемый от оси OZT до проекции радиус-вектора ![]()
![]()
угол места В - есть угол между радиус-вектором ![]()
![]()
Траектория движения БЛА 27 должна полностью повторять траекторию движения имитируемой цели по азимуту и углу места. Дальность и скорость движения БЛА 27 должны быть уменьшены в К раз по сравнению с дальностью и скоростью движения имитируемой цели. Значение коэффициента выбирают из условия полета БЛА 27 в дальней зоне антенны РЛС 28, а также из его возможностей по высоте и скорости полета.The trajectory of the movement of the
После этого координаты точек траектории движения БЛА 27 должны быть пересчитаны в геодезическую СК, где ϕ - широта, λ - долгота, Н - высота. Координаты точек имитируемой траектории БЛА 27 и соответствующие моменты времени прохождения этих точек, а также скорость его движения заносят в полетное задание, которое вводится в память ПНС 24.After that, the coordinates of the points of the trajectory of the movement of the
После включения тестируемой РЛС 28 БЛА 27 с помощью наземного УУ 25 выводится в начальную точку имитируемой траектории и начинает движение в соответствии с полетным заданием, хранящимся в памяти ПНС 24. При этом ППА 1 во время полета ориентирована с помощью ГСП 26 на тестируемую РЛС 28.After turning on the tested
При облучении БЛА 27 зондирующим сигналом СВЧ тестируемой РЛС 28 ППА 1 принимает этот сигнал в двух поляризациях и передает его через вход-выход 1 первого АП 2 на вход 2 сумматора 5, а через вход-выход 1 второго АП 3 и входной ФВ 4 на вход 1 сумматора 5, с выхода которого результирующий сигнал поступает на вход аттенюатора 6. Ослабленный СВЧ сигнал с выхода аттенюатора 6 поступает на вход входного УВЧ 7. После усиления принятый СВЧ сигнал поступает на вход 1 входного смесителя 8, на вход 2 которого поступает гетеродинный сигнал с выхода 1 первого гетеродина 12. С выхода входного смесителя 8 и после усиления в УПЧ 9 преобразованный на промежуточную частоту сигнал поступает на вход 1 демодулятора 10, на вход 2 которого поступают сигналы второго гетеродина 13. В демодуляторе 10 происходит понижение частоты сигнала, разделение его на квадратурные составляющие и аналого-цифровое преобразование. Оцифрованный сигнал в двух квадратурах с выходов 1 и 2 демодулятора 10 поступает на соответствующие входы ЦСП 11. В ЦСП 11 проводится свертка входного цифрового сигнала с импульсными характеристиками N цифровых фильтров. Количество цифровых фильтров, реализуемых в ЦСП 11, а, соответственно, и количество рассчитываемых сверток соответствует возможному числу используемых РЛС 28 зондирующих сигналов. Максимальное значение свертки будет наблюдаться в случае, когда используемая для ее расчета импульсная характеристика будет максимально соответствовать зондирующему сигналу, используемому РЛС 28 на текущем этапе обнаружения/сопровождения/распознавания цели. Для исключения ложного обнаружения зондирующего СВЧ сигнала тестируемой РЛС 28 модуль свертки с максимальным значением сравнивается с порогом. Тип зондирующего СВЧ сигнала тестируемой РЛС 28 определяют по модулю свертки, имеющей максимальное значение и превысившей порог, и кодируют цифровым кодом, который с выхода ЦСП 11 подают на вход 1 УУ и РПП 14. УУ и РПП 14, получая информацию от ПНС 24, фиксирует время и координаты БЛА 27 на момент приема зондирующего СВЧ сигнала тестируемой РЛС 28, а также рассчитывает время задержки излучения имитированного сигнала в зависимости от расстояния между тестируемой РЛС 28 и БЛА 27, его амплитудную модуляцию в соответствии с ЭПР имитируемой цели, с дальностью до нее и ее радиолокационным портретом, доплеровскую добавку частоты, поляризацию. К моменту излучения имитированного сигнала УУ и РПП 14 с выхода 3 передает информацию о параметрах этого сигнала в ФС 15, а с выходов 1 и 2 соответственно на управляющие входы 1 первого и второго управляемых аттенюаторов 22 и 23 - коды затухания. ФС 15 формирует требуемый имитируемый сигнал в цифровом виде в квадратурах и выдает его на модулятор 16, который формирует имитируемый сигнал в аналоговом виде на промежуточной частоте, и передает его на выходной смеситель 17. Выходной смеситель 17 переводит имитируемый сигнал на рабочую частоту РЛС 28 и подает его на вход делителя 18, с выхода которого одна часть имитируемого сигнала поступает на вход первого выходного УВЧ 20, а другая часть - на вход выходного ФВ 19, который изменяет фазу сигнала на π/2 и подает его на вход второго выходного УВЧ 21. Усиленные сигналы с выходов первого и второго выходных УВЧ 20 и 21 поступают соответственно на входы 2 первого и второго управляемых аттенюаторов 22 и 23. Первый управляемый аттенюатор 22 и второй управляемый аттенюатор 23 регулируют уровни сигналов, передаваемых соответственно через первый АП 2 и второй АП 3 на входы-выходы 1 и 2 ППА 1 соответственно, и определяют таким образом поляризацию излучаемого имитированного сигнала. Регулируя уровень ослабления управляемых аттенюаторов 22 и 23, УУ и РПП 14 может устанавливать различные типы поляризации излучаемого ППА 1 сигнала - горизонтальную, вертикальную, круговую или же эллиптическую.When the
Тестируемая РЛС 28, которая принимает и обрабатывает имитированный сигнал также, как и эхосигналы реальных целей, формирует и сопровождает траекторию имитированной цели, классифицирует имитируемую цель и документирует полученные результаты. В случае излучения с борта БЛА 27 помеховых сигналов тестируемая РЛС 28 функционирует в условиях воздействия активных помех. После окончания полета БЛА 27 определяется насколько точно была выполнена программа полета по времени и координатам, записанным во время полета в памяти УУ и РПП 14, а также определяется насколько качественно тестируемая РЛС 28 выполнила свои функции по обнаружению и сопровождению имитированной цели и ее распознаванию. В случае излучения с борта БЛА 27 помеховых сигналов проверяется помехозащищенность данной РЛС.The radar under
При выборе значения коэффициента масштабирования К следует учитывать следующие ограничения:When choosing a value for the scaling factor K, the following restrictions should be considered:
- сверху, поскольку слишком большое значение К дает малое расстояние траектории полета БЛА 27 от тестируемой РЛС 28 и, как следствие, возрастание влияния ошибок позиционирования БЛА 27 на точность воспроизведения траектории имитируемой цели;- from above, since a too large value of K gives a small distance of the flight path of the
- снизу, поскольку слишком малое значение К дает большое расстояние и большую высоту полета БЛА 27, что может ограничиваться его летными возможностями.- from below, since too small value of K gives a large distance and high flight altitude of the
Пусть, например, при неподвижной тестируемой РЛС 28 с секторной зоной обнаружения и высотой фазового центра антенны Нз=10 м требуется имитировать полет аэродинамической цели (АДЦ) на высоте НАДЦ=10000 м со скоростью VАДЦ=1000 км/час с дальности Dmin=360 км до дальности Dmax=410 км при неизменном азимуте АzАДЦ.Let, for example, with a
Текущая дальность до БЛА 27 изменяется от ![]()
![]()
![]()
![]()
![]()
![]()
где ![]()
![]()
Время полета как для АДЦ, так и для БЛА 27 определяется как:The flight time for both ADC and
![]()
![]()
Скорость БЛА 27 определяется как:The speed of the
![]()
![]()
Азимут БЛА 27 соответствует азимуту имитируемой АДЦ, т.е.The azimuth of the
![]()
![]()
Текущий угол места имитируемой АДЦ определяется из треугольника Центр Земли - Фазовый центр антенны тестируемой РЛС 28 - Имитируемая АДЦ, изображенного на фиг. 2. По теореме косинусов:The current elevation angle of the simulated ADC is determined from the triangle Center of the Earth - Phase center of the antenna of the tested radar 28 - Simulated ADC, shown in FIG. 2. According to the cosine theorem:
![]()
![]()
где Rэ=(4/3)R - эквивалентный радиус Земли [Справочник по радиолокации / Под ред. М. Сколника. 1970. Пер. с англ. под общей ред. К.Н. Трофимова. В 4 томах. Том 1. Основы радиолокации. Под ред. Ицхоки. М.: Сов. Радио. 1976. 456 с.]; R=6371,11 км - радиус Земли (Земля представляется сферой).where R e \u003d (4/3) R is the equivalent radius of the Earth [Handbook of radar / Ed. M. Skolnik. 1970. Trans. from English. under the general editorship. K.N. Trofimov. In 4 volumes.
Откуда угол места имитируемой АДЦ, как и угол места БЛА 27, определяется как:Whence the elevation angle of the simulated ADC, as well as the elevation angle of the

Текущая высота полета БЛА 27, учитывая, что ![]()
![]()

Рассчитанные значения скорости и высоты для полета БЛА 27 необходимо проанализировать на их соответствие его летным возможностям. При необходимости значения скорости и высоты, планируемые для полета БЛА 27, могут быть изменены подбором значения масштабирующего коэффициента К.The calculated values of speed and altitude for the flight of the
На фиг. 3 приведен результат расчета угла места имитируемой траектории АДЦ, а на фиг. 4 результат расчета траекторий БЛА 27 в плоскости «дальность-высота» для оценки масштабирующего коэффициента К снизу.In FIG. 3 shows the result of calculating the elevation angle of the simulated ADC trajectory, and Fig. 4 is the result of calculating the trajectories of the
Формирование полетного задания для БЛА 27 осуществляется следующим образом. Исходя из условий дальней зоны антенны тестируемой РЛС 28, прилегающей местности, летных возможностей БЛА 27, следует выбрать подходящий масштабирующий коэффициент К. Затем, с учетом выбранной траектории движения имитируемой цели и значения коэффициента К необходимо рассчитать исходные данные - координаты точек траектории БЛА 27 в сферической СК. После этого координаты точек траектории БЛА 27, рассчитанные в сферической СК, т.е. значения дальности, азимута и угла места каждой задаваемой точки его траектории необходимо пересчитать в геодезические координаты - долготу, широту и высоту.The formation of the flight task for the
Пересчет координат осуществляется последовательно: координаты из сферической СК пересчитываются в топоцентрическую систему СК, затем - в геоцентрическую СК и после этого - в геодезическую СК.The recalculation of coordinates is carried out sequentially: the coordinates from the spherical CS are recalculated into the topocentric CS, then into the geocentric CS, and then into the geodesic CS.
Пересчет из сферической СК в топоцентрическую прямоугольную СК проводится в соответствии с формулами [Ю.С. Саврасов. Алгоритмы и программы в радиолокации. М.: Радио и связь, 1985 г., 216 с.]:Recalculation from spherical SC to topocentric rectangular SC is carried out in accordance with the formulas [Yu.S. Savrasov. Algorithms and programs in radar. M.: Radio and communication, 1985, 216 p.]:

Пересчет из топоцентрической прямоугольной СК в геоцентрическую СК проводится в соответствии с формулой [Ю.С. Саврасов. Алгоритмы и программы в радиолокации. М.: Радио и связь, 1985 г., 216 с.]:Recalculation from topocentric rectangular SC to geocentric SC is carried out in accordance with the formula [Yu.S. Savrasov. Algorithms and programs in radar. M.: Radio and communication, 1985, 216 p.]:

где ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

Н3 - высота фазового центра антенны тестируемой РЛС 28;H 3 - height of the phase center of the antenna under
![]()
![]()

Земли до поверхности эллипсоида вращения при заданной геоцентрической широте Вз,Earth to the surface of the ellipsoid of revolution at a given geocentric latitude B s ,
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
λРЛС - долгота точки стояния тестируемой РЛС 28.λ radar - longitude of the standing point of the tested
В формуле (8) операция в круглых скобках переводит координаты из топоцентрической прямоугольной СК в ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Пересчет из геоцентрической СК в геодезическую СК осуществляется следующим образом.Recalculation from geocentric CS to geodetic CS is carried out as follows.
При ![]()
![]()

где ![]()
![]()
При ![]()
![]()

где 
При ![]()
![]()

Во всех других случаях значения широты вычисляются итерационно, и после последней итерации высота определяются по формуле [ГОСТ 32453-2017. Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек. Введен в действие с 01.07.2018 г. Приказом Федерального агентства по техническому регулированию и метрологии от 12 сентября 2017 г. №1055-ст.]:In all other cases, the latitude values are calculated iteratively, and after the last iteration, the height is determined by the formula [GOST 32453-2017. Global navigation satellite system. Coordinate systems. Methods for transforming the coordinates of the determined points. Entered into force on July 1, 2018 by Order of the Federal Agency for Technical Regulation and Metrology dated September 12, 2017 No. 1055-st.]:

Для организации итерационного процесса по вычислению широты ϕn определяются вспомогательные величины по формулам [ГОСТ 32453-2017. Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек. Введен в действие с 01.07.2018 г. Приказом Федерального агентства по техническому регулированию и метрологии от 12 сентября 2017 г. №1055-ст.]:To organize the iterative process for calculating the latitude ϕ n , auxiliary quantities are determined according to the formulas [GOST 32453-2017. Global navigation satellite system. Coordinate systems. Methods for transforming the coordinates of the determined points. Entered into force on July 1, 2018 by Order of the Federal Agency for Technical Regulation and Metrology dated September 12, 2017 No. 1055-st.]:

![]()
![]()
После этого последовательно вычисляют величины b и s2 по формулам [ГОСТ 32453-2017. Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек. Введен в действие с 01.07.2018 г. Приказом Федерального агентства по техническому регулированию и метрологии от 12 сентября 2017 г. №1055-ст.]:After that, the values of b and s 2 are sequentially calculated according to the formulas [GOST 32453-2017. Global navigation satellite system. Coordinate systems. Methods for transforming the coordinates of the determined points. Entered into force on July 1, 2018 by Order of the Federal Agency for Technical Regulation and Metrology dated September 12, 2017 No. 1055-st.]:

Если после n-й итерации ![]()
![]()
![]()
![]()
Точность расчета геодезических координат должна быть не хуже единицы младшего разряда кодов, вводимых в ПНС 24. Результаты расчетов показывают, что пятой итерации точность вычисления широты объекта на высоте 1000 м, достигает порядка 10-8 - 10-9, и это удовлетворяет существующим характеристикам систем навигации БЛА малого радиуса действия.The accuracy of the calculation of geodetic coordinates should be no worse than the least significant digit of the codes entered in the
При этом следует учитывать, что чем ближе к тестируемой РЛС 28 будет находиться БЛА 27, тем больше ошибки ее позиционирования будут влиять на точность имитации выбранной траектории движения АДЦ. Поэтому для оценки сверху величины масштабирующего множителя К оценим влияние случайных ошибок позиционирования БЛА 27 на точность имитации траектории движения АДЦ.It should be taken into account that the closer to the tested
Ошибки позиционирования в навигационных системах GPS/ГЛОНАСС задаются максимальной ошибкой позиционирования объекта навигации по расстоянию на плоскости ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Сущность метода для рассматриваемой задачи состоит в том, что в ходе вычислительного эксперимента формируются выборки координат в плоскостной системе Гаусса-Крюгера и высоты, которые содержат постоянную составляющую, определяющую реальное положение БЛА 27 относительно тестируемой РЛС 28, и случайную составляющую, обусловленную ошибками позиционирования. Затем, получаемые выборки координат пересчитываются в сферическую СК и подвергаются статистической обработке с целью определения среднеквадратических ошибок позиционирования в этой сферической СК.The essence of the method for the problem under consideration is that during the computational experiment, samples of coordinates in the planar Gauss-Kruger system and heights are formed, which contain a constant component that determines the real position of the
Вычисления ошибок позиционирования БЛА 27 в сферической СК условно разделяются на следующие этапы.The calculation of positioning errors of the
1) Пересчет координат БЛА 27 из геодезической СК в плоскостные координаты СК Гаусса-Крюгера.1) Recalculation of the
Связь геодезической СК с плоскостными координатами поясняется на фиг. 7, где показана одна из шестиградусных зон (проекций) Гаусса-Крюгера. Пересчет широты ϕ и долготы λ в плоскостные координаты СК Гаусса-Крюгера х, у проводится по формулам [ГОСТ 32453-2017. Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек. Введен в действие с 01.07.2018 г. Приказом Федерального агентства по техническому регулированию и метрологии от 12 сентября 2017 г. №1055-ст.]:The connection of the geodetic CS with planar coordinates is illustrated in Fig. 7, which shows one of the six-degree Gauss-Kruger zones (projections). Recalculation of latitude ϕ and longitude λ into planar coordinates of the Gauss-Kruger SC x, y is carried out according to the formulas [GOST 32453-2017. Global navigation satellite system. Coordinate systems. Methods for transforming the coordinates of the determined points. Entered into force on July 1, 2018 by Order of the Federal Agency for Technical Regulation and Metrology dated September 12, 2017 No. 1055-st.]:
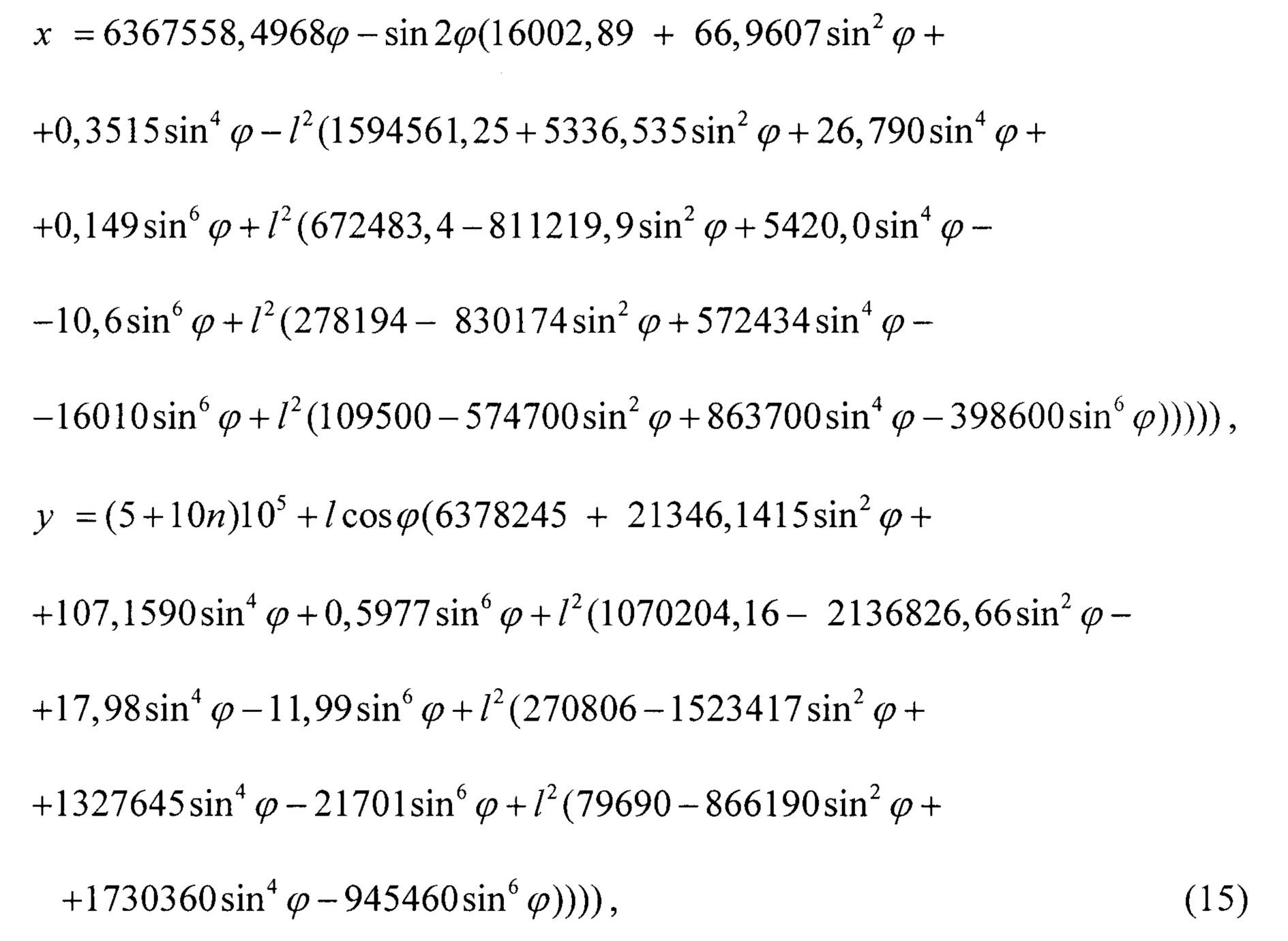
где ![]()
![]()
![]()
![]()
Е[…] - целая часть числа.E[…] is the integer part of the number.
2) Формирование выборок координат с учетом плоскостных ошибок позиционирования и ошибок позиционирования по высоте.2) Formation of coordinate samples taking into account planar positioning errors and positioning errors in height.
Координаты точки положения БЛА 27 с учетом плоскостных ошибок позиционирования и ошибок позиционирования по высоте, которые обусловлены ошибками его навигационной системы, определяются по формулам:The coordinates of the

где ![]()
![]()
i=1…n, n - количество циклов вычислений (количество выборок по каждой координате).i=1…n, n - number of calculation cycles (number of samples for each coordinate).
В предположении, что распределение ошибок позиционирования подчиняется нормальному закону, переход от максимальной ошибки к среднеквад-ратическим ошибкам по плоскостным координатам и высоте осуществляется в соответствии с правилом «трех сигм» по формулам:Assuming that the distribution of positioning errors obeys the normal law, the transition from the maximum error to the root-mean-square errors in planar coordinates and height is carried out in accordance with the “three sigma” rule according to the formulas:

Для реализации метода Монте-Карло случайные плоскостные ошибки по осям х и y СК Гаусса-Крюгера формируются по формулам:To implement the Monte Carlo method, random in-plane errors along the x and y axes of the Gauss-Kruger SC are formed by the formulas:

где 
randn(0,1) - датчик нормальных случайных чисел с нулевым математическим ожиданием и единичной дисперсией;randn(0,1) - generator of normal random numbers with zero mathematical expectation and unit variance;
rand(0,1) - датчик случайных чисел, распределенных по равномерному закону на интервале 0…1;rand(0,1) - generator of random numbers distributed according to a uniform law on the
n - количество выборок.n is the number of samples.
После этого полученные в ходе цифрового моделирования выборки плоскостных координат БЛА 27 необходимо пересчитать в сферическую СК. Для этого надо последовательно осуществить цепочку пересчетов:After that, the samples of planar coordinates of the
- пересчет плоскостных координат в геодезическую СК;- recalculation of planar coordinates into geodesic SC;
- пересчет координат из геодезической СК в геоцентрическую СК;- recalculation of coordinates from geodetic CS to geocentric CS;
- пересчет координат из геоцентрической СК в топоцентрическую прямоугольную СК;- recalculation of coordinates from geocentric CS to topocentric rectangular CS;
- пересчет координат из топоцентрической прямоугольной СК в сферическую СК.- recalculation of coordinates from a topocentric rectangular CS to a spherical CS.
3) Пересчет выборок полученных плоскостных координат БЛА 27 в геодезическую СК.3) Recalculation of samples of the obtained planar coordinates of the
Выборки координат ![]()
![]()
![]()
![]()

где В0 - геодезическая широта точки, абсцисса которой равна абсциссе х определяемой точке, а ордината равна нулю; ![]()
![]()
Значения ϕ и λ, получаемые по формулам (19), используются - в радианах.The values of ϕ and λ obtained by formulas (19) are used - in radians.
Значение величины B 0 определяется по формуле [ГОСТ 32453-2017.The value of B 0 is determined by the formula [GOST 32453-2017.
Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек. Введен в действие с 01.07.2018 г. Приказом Федерального агентства по техническому регулированию и метрологии от 12 сентября 2017 г. №1055-ст.]:Global navigation satellite system. Coordinate systems. Methods for transforming the coordinates of the determined points. Entered into force on July 1, 2018 by Order of the Federal Agency for Technical Regulation and Metrology dated September 12, 2017 No. 1055-st.]:

где ![]()
![]()
Значение величины ΔB определяется по формуле [ГОСТ 32453-2017. Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек. Введен в действие с 01.07.2018 г. Приказом Федерального агентства по техническому регулированию и метрологии от 12 сентября 2017 г. №1055-ст.]:The value of ΔB is determined by the formula [GOST 32453-2017. Global navigation satellite system. Coordinate systems. Methods for transforming the coordinates of the determined points. Entered into force on July 1, 2018 by Order of the Federal Agency for Technical Regulation and Metrology dated September 12, 2017 No. 1055-st.]:

где 
Значение величины ![]()
![]()


4) Пересчет выборок координат БЛА 27 из геодезической СК в геоцентрическую СК.4) Recalculation of samples of coordinates of the
Пересчет из геодезической СК в геоцентрическую СК проводится по формулам [ГОСТ 32453-2017. Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек. Введен в действие с 01.07.2018 г. Приказом Федерального агентства по техническому регулированию и метрологии от 12 сентября 2017 г. №1055-ст.]:Recalculation from geodetic SC to geocentric SC is carried out according to the formulas [GOST 32453-2017. Global navigation satellite system. Coordinate systems. Methods for transforming the coordinates of the determined points. Entered into force on July 1, 2018 by Order of the Federal Agency for Technical Regulation and Metrology dated September 12, 2017 No. 1055-st.]:

где ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

При таком пересчете плоскость X Г 0Z Г проходит через точку стояния тестируемой РЛС 28.With this recalculation, the plane X G 0Z G passes through the standing point of the tested
5) Пересчет выборок координат БЛА из геоцентрической СК в топоцентрическую прямоугольную СК.5) Recalculation of UAV coordinate samples from geocentric CS to topocentric rectangular CS.
Пересчет из геоцентрической СК в топоцентрическую прямоугольную СК проводится в соответствии с формулой [Ю.С. Саврасов. Алгоритмы и программы в радиолокации. М.: Радио и связь, 1985 г., 216 с.]:Recalculation from geocentric SC to topocentric rectangular SC is carried out in accordance with the formula [Yu.S. Savrasov. Algorithms and programs in radar. M.: Radio and communication, 1985, 216 p.]:

где ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
6) Пересчет из топоцентрической прямоугольной СК в сферическую СК. Пересчет из топоцентрической прямоугольной СК в сферическую СК проводится в соответствии с формулами [Ю.С. Саврасов. Алгоритмы и программы в радиолокации. М.: Радио и связь, 1985 г., 216 с.]:6) Recalculation from topocentric rectangular CS to spherical CS. Recalculation from a topocentric rectangular SC to a spherical SC is carried out in accordance with the formulas [Yu.S. Savrasov. Algorithms and programs in radar. M.: Radio and communication, 1985, 216 p.]:
![]()
![]()


7) Вычисление среднеквадратических ошибок позиционирования БЛА 27 в сферической СК.7) Calculation of root-mean-square positioning errors of the
При наличии полученных в ходе цифрового моделирования выборок координат (дальности Di, азимута Azi и угла места Вi, где i=1…n) оценки среднеквадратических ошибок позиционирования БЛА 27 в сферической СК определяются по формулам [Е.С. Вентцель. Теория вероятностей. М.: Наука, 1969 г., 576 с.]:In the presence of coordinates obtained in the course of digital modeling (range D i , azimuth Az i and elevation angle B i , where i=1...n), estimates of root-mean-square positioning errors of the



где 


На фиг. 8-13 приведены результаты моделирования ошибок позиционирования БЛА 27 для двух вариантов его местоположения (по 105 циклов моделирования для каждого варианта):In FIG. 8-13 shows the results of modeling errors in the positioning of the
- первый вариант: удаление 2000 м от тестируемой РЛС 28 по оси х СК Гаусса-Крюгера в направлении на север (фиг. 8-10);- the first option: the removal of 2000 m from the tested
- второй вариант: удаление 12000 м от тестируемой РЛС 28 по оси х СК Гаусса-Крюгера в направлении на север (фиг. 11-13).- the second option: the removal of 12000 m from the tested
При этом прочие условия составили:The other conditions were:
- высота нахождения БЛА 27: вариант 1 НБЛА=15 м; вариант 2 НБЛА=100 м;- location height of UAV 27: option 1 H UAV =15 m; option 2 H UAV =100 m;
- широта точки стояния тестируемой РЛС 28 ![]()
![]()
- долгота точки стояния тестируемой РЛС 28 ![]()
![]()
- электрическая ось антенны тестируемой РЛС 28 направлена на север;- the electric axis of the antenna of the tested
- высота фазового центра антенны тестируемой РЛС 28 Нз=10 м;- height of the phase center of the antenna of the tested radar 28 N s =10 m;
- плоскостная ошибка позиционирования БЛА 27 ![]()
![]()
- ошибка позиционирования БЛА 27 по высоте ![]()
![]()
В таблицах 1 и 2 приведены результаты, полученные в результате проведения 105 циклов цифрового моделирования. Сходимость истинных значений приведенных координат и координат, рассчитанных в результате моделирования, подтверждает адекватность модели рассматриваемым условиям и достоверность результатов моделирования.Tables 1 and 2 show the results obtained after 10 5 cycles of digital simulation. The convergence of the true values of the given coordinates and the coordinates calculated as a result of the simulation confirms the adequacy of the model to the conditions under consideration and the reliability of the simulation results.


Из анализа таблицы 2 видно, что угловые ошибки позиционирования уменьшаются пропорционально увеличению удаления БЛА 27 от тестируемой РЛС 28. На удалении 12000 м БЛА 27 от тестируемой РЛС 28, что соответствует величине масштабирующего коэффициента К=30, среднеквадратические ошибки позиционирования составляют по азимуту 0,003°, по углу места 0,0005°. Это на один-два порядка меньше, чем ошибки измерения угловых координат большей части существующих и перспективных РЛС. Среднеквадратическая ошибка позиционирования по дальности при К=30 составит ![]()
![]()
Таким образом, для рассматриваемого примера имитации траектории движения АДЦ с помощью БЛА 27 вполне подходит значение масштабирующего коэффициента К - 30. Это соответствует и возможностям современных БЛА коптерного типа, и исключает сильное влияние ошибок позиционирования БЛА 27 на координатные ошибки имитации траектории движения АДЦ.Thus, for the considered example of simulating the ADC movement
Основными параметрами, определяющими подобие имитационного сигнала, излучаемого с борта БЛА 27, и эхосигнала реальной АДЦ являются: время задержки излучения сигнала от момента приема зондирующего сигнала тестируемой РЛС 28; мощность; доплеровская поправка частоты; поляризация; временная и фазовая модуляция.The main parameters that determine the similarity of the simulated signal emitted from the
Время задержки излучения имитационного сигнала от момента приема ППА1 зондирующего СВЧ сигнала тестируемой РЛС 28 определяется по формуле:The delay time of the emission of the simulated signal from the moment of receipt of the PPA1 of the probing microwave signal of the tested

где с - скорость света.where c is the speed of light.
Сущность формулы (27) поясняется на фиг. 14.The essence of formula (27) is illustrated in Fig. fourteen.
Мощность имитационного сигнала, излучаемого с борта БЛА 27, определяется из условия того, что он должен создавать на входе приемной антенны тестируемой РЛС 28 такую же спектральную плотность потока мощности, как и эхосигнал имитируемой цели. Спектральная плотность потока мощности, создаваемая на входе приемной антенны тестируемой РЛС 28 имитационным сигналом, излученным с борта БЛА 27, определяется по формуле:The power of the simulated signal emitted from the

где GM - коэффициент направленного действия (КНД) ГОТА 1 на передачу;where G M - coefficient of directional action (KND)
РИ - мощность имитационного сигнала;P I - the power of the imitation signal;
![]()
![]()
LИ - коэффициент потерь в антенно-фидерном тракте имитатора;L I - loss factor in the antenna-feeder path of the simulator;
![]()
![]()
Спектральная плотность потока мощности, создаваемая на входе антенны тестируемой РЛС 28 эхосигналом имитируемой АДЦ, определяется по формуле:The spectral power flux density created at the input of the antenna of the tested

где РП - мощность зондирующего сигнала, формируемая передатчиком тестируемой РЛС 28;where R P - the power of the probing signal generated by the transmitter of the tested
GП - КНД передающей антенны тестируемой РЛС 28;G P - KND transmitting antenna tested
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Из (28) и (29) следует, что мощность имитационного сигнала при ![]()
![]()

Так при Рп=100 кВт, GП=40 дБ, LП=-2 дБ, LАДЦ=-3 дБ, DАДЦ=400 км, σАДЦ=10 м2, GБЛА=4 дБ, LИ=-3дБ, LБЛА=-0,5 дБ и DБЛА=4 км мощность имитационного сигнала составит:So at R p =100 kW, G P =40 dB, L P = -2 dB, L ADC = -3 dB, D ADC =400 km, σ ADC =10 m 2 , G UAV =4 dB, L I = -3 dB, L UAV = -0.5 dB and D UAV = 4 km, the power of the imitation signal will be:

Доплеровская поправка частоты определяется следующим образом. Выбранная траектория движения имитируемой АДЦ дискретизируется с небольшим временным интервалом dt, и на каждом этом интервале определяется радиальная скорость относительно тестируемой РЛС 28 по формуле:The Doppler frequency correction is determined as follows. The selected trajectory of the simulated ADC is discretized with a small time interval dt, and at each of this interval the radial velocity relative to the tested

где Di и Di+1 - дальности имитируемой АДЦ относительно тестируемой РЛС 28 на смежных интервалах дискретизации. После этого доплеровская поправка частоты для каждого интервала дискретизации определяется по формуле:where D i and D i+1 - the range of the simulated ADC relative to the tested

где LП - длина волны сигнала, излучаемого передающим устройством тестируемой РЛС 28.where L P is the wavelength of the signal emitted by the transmitter of the tested
Требуемая поляризация излучаемых сигналов обеспечивается регулировкой сигналов, подаваемых на входы-выходы 1 и 2 ППА 1.The required polarization of the emitted signals is provided by adjusting the signals applied to the inputs-
Фазовая модуляция имитируемых сигналов должна соответствовать фазовой модуляции сигналов, принимаемых от тестируемой РЛС 28.The phase modulation of the simulated signals must correspond to the phase modulation of the signals received from the tested
Порог, с которым сравниваются продетектированные сигналы, выделенные на выходах N цифровых фильтров, реализуемых в ЦСП 11, должен превышать мощность внутреннего шума приемного тракта РШ на величину 15-18 дБ, что обеспечит вероятность правильного обнаружения близкую к единице при вероятности ложного обнаружения 10-10…10-8 при нефлюктуирующем сигнале [Справочник по радиолокации / Под ред. М. Сколника. 1970. Пер. с англ. под общей ред. К.Н. Трофимова. В 4 томах. Том 1. Основы радиолокации. Под ред. Ицхоки. М.: Сов. Радио. 1976. с. 44, рис. 4]. В приемный тракт входят ППА 1, первый АП 2, второй АП 3, входной фазовращатель 4, сумматор 5, входной УВЧ 6, смеситель 8, входной УПЧ 9, блок демодуляции 10, цифровые фильтры и цифровые детекторы, реализованные в ЦСП 11. Уровень шума будет определяться шириной полосы пропускания определенного цифрового фильтра, что определяет разный уровень порога для каждого цифрового фильтра. Для определения уровня порога необходимо измерить мощность шума РШ на выходе каждого цифрового детектора при отсутствии зондирующих СВЧ сигналов от тестируемой РЛС 28, определить уровни порогов, исходя из вероятности ложного обнаружения, и записать эти значения в память ЦСП 11. При линейном детектировании нормально распределенного шума закон распределения огибающей этого шума будет иметь релеевскую плотность распределения [С.И. Баскаков. Радиотехнические цепи и сигналы. Издание третье, переработанное и дополненное. М.: Высшая школа. 2000. Формула (7.61), с. 182]:The threshold with which the detected signals are compared, selected at the outputs of N digital filters implemented in the

Тогда уровень порога Uп определяется при заданном уровне ложного обнаружения РШ из уравнения:Then the threshold level U p is determined at a given level of false detection R W from the equation:

Решая уравнение, получаем ![]()
![]()
Например, для FЛО=10-8 значение порога ![]()
![]()
Анализ работоспособности предлагаемого способа имитации эхосигналов движущейся цели по сравнению с прототипом показывает, что излучение имитационного сигнала с борта БЛА, который перемещается в азимутально-угломестной плоскости аналогично имитируемой цели, с задержкой, рассчитываемой с учетом расстояний имитируемая цель-тестируемая РЛС и БЛА-тестируемая РЛС, позволяет формировать имитационный эхосигнал с любой точки зоны обнаружения указанной РЛС с координатными ошибками, меньшими, чем ошибки измерения координат большинства современных РЛС. При этом параметры излучаемых с борта БЛА имитационных эхосигналов или помех будут соответствовать параметрам эхосигналов имитируемой цели или помех имитируемого помехопостановщика на всем протяжении их полета в зоне обнаружения тестируемой РЛС. Применение предлагаемого способа обеспечит снижение стоимости и времени тестирования РЛС поскольку: во-первых, БЛА имеет небольшую как собственную стоимость, так и стоимость своего летного времени; во-вторых, упрощается процедура организации полетов на основе предлагаемого способа по сравнению с организацией полетов реальных аэродинамических или баллистических целей для тестирования РЛС. Таким образом, можно сделать вывод о решении задачи и достижении технического результата изобретения.An analysis of the performance of the proposed method for simulating echo signals of a moving target in comparison with the prototype shows that the emission of a simulated signal from the UAV, which moves in the azimuth-elevation plane similar to the simulated target, with a delay calculated taking into account the distances of the simulated target-tested radar and UAV-tested radar , allows you to generate a simulated echo signal from any point in the detection zone of the specified radar with coordinate errors that are smaller than the errors in measuring the coordinates of most modern radars. In this case, the parameters of the simulated echo signals or interference emitted from the UAV will correspond to the parameters of the echo signals of the simulated target or the interference of the simulated jammer throughout their flight in the detection zone of the tested radar. The application of the proposed method will reduce the cost and time of testing the radar because: firstly, the UAV has a small cost both of its own and the cost of its flight time; secondly, the procedure for organizing flights based on the proposed method is simplified in comparison with the organization of flights of real aerodynamic or ballistic targets for testing radars. Thus, we can conclude that the problem is solved and the technical result of the invention is achieved.
Отличительные признаки заявляемого способа имитации эхосигналов движущейся цели обеспечивают появление новых свойств, не достигаемых в прототипе и аналогах. Проведенный сопоставительный анализ известных способов, технических решений (аналогов) в исследуемой и смежных предметных областях позволил установить: аналоги с совокупностью признаков, тождественных всем признакам заявленного способа, отсутствуют, что указывает на соответствие заявленного устройства условию "новизны".Distinctive features of the proposed method of simulating the echo signals of a moving target provide the emergence of new properties that are not achievable in the prototype and analogues. A comparative analysis of known methods, technical solutions (analogues) in the studied and related subject areas made it possible to establish: there are no analogues with a set of features that are identical to all the features of the claimed method, which indicates that the claimed device complies with the "novelty" condition.
Результаты поиска известных решений в области радиолокации, радиотехники и антенных измерений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявляемого способа, показали, что они не следуют явным образом из уровня техники. Также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения действий на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности "изобретательский уровень".The results of the search for known solutions in the field of radar, radio engineering and antenna measurements in order to identify features that match the distinguishing features of the prototype of the proposed method, showed that they do not follow explicitly from the prior art. Also, the influence of the actions provided for by the essential features of the claimed invention on the achievement of the specified technical result has not been revealed. Therefore, the claimed invention meets the condition of patentability "inventive step".
Изобретение является "промышленно приемлемым", поскольку предлагаемый способ может быть внедрен на существующей элементной базе для имитации сигнально-помеховой радиолокационной обстановки при испытаниях РЛС.The invention is "industrially acceptable", since the proposed method can be implemented on the existing element base to simulate the signal-to-noise radar environment during radar testing.
Claims (1)
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2776663C1 true RU2776663C1 (en) | 2022-07-22 |
Family
ID=
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115902804A (en) * | 2022-11-07 | 2023-04-04 | 南京航空航天大学 | Unmanned aerial vehicle cluster type identification method and system |
| CN117647803A (en) * | 2023-11-17 | 2024-03-05 | 乾元科学研究院 | Target recognition system and method for low-speed unmanned aerial vehicle |
| RU2817392C1 (en) * | 2023-09-19 | 2024-04-16 | Артем Анатольевич Задорожный | Method for testing electronic countermeasures systems of unmanned aerial vehicles |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1085071A (en) * | 1963-11-15 | 1967-09-27 | Elliott Brothers London Ltd | Radar target simulators |
| RU2099739C1 (en) * | 1996-04-08 | 1997-12-20 | Центральный научно-исследовательский институт "Гранит" | Radar |
| US6067041A (en) * | 1998-10-15 | 2000-05-23 | Northrop Grumman Corporation | Moving target simulator |
| RU2391682C1 (en) * | 2008-12-26 | 2010-06-10 | Открытое Акционерное Общество "Уральское проектно-конструкторское бюро "Деталь" | Method and device for simulating monopulse radar signal |
| RU2420760C2 (en) * | 2009-11-26 | 2011-06-10 | Открытое акционерное общество "Российская корпорация ракетно-космического приборостроения и информационных систем" (ОАО "Российские космические системы") | Evaluation method of radio countermeasure efficiency of signal of satellite communication by interference influence on receiving systems of retranslators, and device for its implementation |
| CN108872955A (en) * | 2018-06-22 | 2018-11-23 | 成都聚利中宇科技有限公司 | Radar echo signal analogy method and system |
| RU189247U1 (en) * | 2019-02-21 | 2019-05-17 | Федеральное государственное автономное образовательное учреждение высшего образования "Уральский федеральный университет имени первого Президента России Б.Н. Ельцина" | SIMULATOR OF REFLECTED RADAR SIGNALS |
| RU2703998C1 (en) * | 2019-03-26 | 2019-10-23 | Акционерное общество "Научно-производственный центр Тверских военных пенсионеров" (АО "НПЦ ТВП") | Signal-interference complex |
| CN111123230A (en) * | 2020-01-21 | 2020-05-08 | 湖南宜通华盛科技有限公司 | Phased array intermediate frequency radar simulator, radar signal processor testing method and device |
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1085071A (en) * | 1963-11-15 | 1967-09-27 | Elliott Brothers London Ltd | Radar target simulators |
| RU2099739C1 (en) * | 1996-04-08 | 1997-12-20 | Центральный научно-исследовательский институт "Гранит" | Radar |
| US6067041A (en) * | 1998-10-15 | 2000-05-23 | Northrop Grumman Corporation | Moving target simulator |
| RU2391682C1 (en) * | 2008-12-26 | 2010-06-10 | Открытое Акционерное Общество "Уральское проектно-конструкторское бюро "Деталь" | Method and device for simulating monopulse radar signal |
| RU2420760C2 (en) * | 2009-11-26 | 2011-06-10 | Открытое акционерное общество "Российская корпорация ракетно-космического приборостроения и информационных систем" (ОАО "Российские космические системы") | Evaluation method of radio countermeasure efficiency of signal of satellite communication by interference influence on receiving systems of retranslators, and device for its implementation |
| CN108872955A (en) * | 2018-06-22 | 2018-11-23 | 成都聚利中宇科技有限公司 | Radar echo signal analogy method and system |
| RU189247U1 (en) * | 2019-02-21 | 2019-05-17 | Федеральное государственное автономное образовательное учреждение высшего образования "Уральский федеральный университет имени первого Президента России Б.Н. Ельцина" | SIMULATOR OF REFLECTED RADAR SIGNALS |
| RU2703998C1 (en) * | 2019-03-26 | 2019-10-23 | Акционерное общество "Научно-производственный центр Тверских военных пенсионеров" (АО "НПЦ ТВП") | Signal-interference complex |
| CN111123230A (en) * | 2020-01-21 | 2020-05-08 | 湖南宜通华盛科技有限公司 | Phased array intermediate frequency radar simulator, radar signal processor testing method and device |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115902804A (en) * | 2022-11-07 | 2023-04-04 | 南京航空航天大学 | Unmanned aerial vehicle cluster type identification method and system |
| CN115902804B (en) * | 2022-11-07 | 2024-01-05 | 南京航空航天大学 | Unmanned aerial vehicle cluster type identification method and system |
| RU2821601C1 (en) * | 2023-09-06 | 2024-06-25 | Артем Анатольевич Задорожный | Method for testing control channel detection systems of unmanned aerial vehicles on secured facilities |
| RU2817392C1 (en) * | 2023-09-19 | 2024-04-16 | Артем Анатольевич Задорожный | Method for testing electronic countermeasures systems of unmanned aerial vehicles |
| RU2824749C1 (en) * | 2023-09-28 | 2024-08-13 | Публичное акционерное общество "Научно-производственное объединение "Алмаз" имени академика А.А. Расплетина" (ПАО "НПО "Алмаз") | Frequency converter for generating doppler shift |
| CN117647803A (en) * | 2023-11-17 | 2024-03-05 | 乾元科学研究院 | Target recognition system and method for low-speed unmanned aerial vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Bleh et al. | ${W} $-band time-domain multiplexing FMCW MIMO radar for far-field 3-D imaging | |
| Knott et al. | Radar cross section | |
| Dybdal | Radar cross section measurements | |
| Rahman | Fundamental principles of radar | |
| Skolnik | Fifty years of radar | |
| Vu et al. | Fast time-domain algorithms for UWB bistatic SAR processing | |
| CN105467369B (en) | A kind of target echo simulation method and apparatus | |
| Rosłoniec | Fundamentals of the radiolocation and radionavigation | |
| RU2562060C1 (en) | Method of external radar detection of trajectory flight instabilities of aircraft using structure of its pulse response characteristic | |
| RU2776663C1 (en) | Method for simulation of echoes of moving target in detection zone of tested radar station | |
| Spencer | A compact phased array radar for UAS sense and avoid | |
| KR20220117655A (en) | Test system of seeker for seeking multiple target and method of thereof | |
| Belous | Handbook of microwave and radar engineering | |
| Jha et al. | Ka-Band FMCW Radar Altimeter for Navigation | |
| Häusler et al. | Venus atmospheric, ionospheric, surface and interplanetary radio-wave propagation studies with the VeRa radio-science experiment | |
| Barton | The future of pulse radar for missile and space range instrumentation | |
| Durden et al. | DPCA-Based Doppler Radar Measurements from Space: Effect of System Errors on Velocity Estimation Performance | |
| Nebylov et al. | Radar Altimeters | |
| RU2787576C1 (en) | Radiolocation target simulator | |
| Artyushenko et al. | Measurement error estimation of motion variables for extended objects under changing range conditions | |
| Markov et al. | Software Complex for Modeling the Work of Multichannel SAR in Wide Range of Application | |
| Surender et al. | Dynamic RCS Modelling of Launch Vehicle Prior to Launch for Estimation of Real-time SNR | |
| RU2790066C1 (en) | Device for testing radio engineering systems for passive tracking of aircraft | |
| Wang et al. | Analyze on Space Target Detection Capability of Ground-based Radar Based on STK | |
| RU2807022C1 (en) | Method for measuring width of antenna directive diagram using fly-by method |