KR20180067138A - Scarfing Apparatus and Control Method using the same - Google Patents
Scarfing Apparatus and Control Method using the same Download PDFInfo
- Publication number
- KR20180067138A KR20180067138A KR1020160168563A KR20160168563A KR20180067138A KR 20180067138 A KR20180067138 A KR 20180067138A KR 1020160168563 A KR1020160168563 A KR 1020160168563A KR 20160168563 A KR20160168563 A KR 20160168563A KR 20180067138 A KR20180067138 A KR 20180067138A
- Authority
- KR
- South Korea
- Prior art keywords
- slab
- unit
- pressure water
- scarping
- light emitting
- Prior art date
Links
Images
















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22D—CASTING OF METALS; CASTING OF OTHER SUBSTANCES BY THE SAME PROCESSES OR DEVICES
- B22D11/00—Continuous casting of metals, i.e. casting in indefinite lengths
- B22D11/12—Accessories for subsequent treating or working cast stock in situ
- B22D11/1213—Accessories for subsequent treating or working cast stock in situ for heating or insulating strands
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22D—CASTING OF METALS; CASTING OF OTHER SUBSTANCES BY THE SAME PROCESSES OR DEVICES
- B22D11/00—Continuous casting of metals, i.e. casting in indefinite lengths
- B22D11/12—Accessories for subsequent treating or working cast stock in situ
- B22D11/1226—Accessories for subsequent treating or working cast stock in situ for straightening strands
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22D—CASTING OF METALS; CASTING OF OTHER SUBSTANCES BY THE SAME PROCESSES OR DEVICES
- B22D11/00—Continuous casting of metals, i.e. casting in indefinite lengths
- B22D11/12—Accessories for subsequent treating or working cast stock in situ
- B22D11/124—Accessories for subsequent treating or working cast stock in situ for cooling
- B22D11/1246—Nozzles; Spray heads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K7/00—Cutting, scarfing, or desurfacing by applying flames
- B23K7/06—Machines, apparatus, or equipment specially designed for scarfing or desurfacing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V8/00—Prospecting or detecting by optical means
- G01V8/10—Detecting, e.g. by using light barriers
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- General Physics & Mathematics (AREA)
- Geophysics (AREA)
- Perforating, Stamping-Out Or Severing By Means Other Than Cutting (AREA)
Abstract
Description
본 발명은 스카핑 장치 및 이를 이용한 스카핑 장치 제어방법에 관한 것이다. 더욱 상세하게는, 슬라브의 스카핑 작업시 슬라브의 벤딩 높이에 따라 고압수의 분사 높이를 가변시켜 스카핑 융착설을 제거하는 스카핑 장치 및 이를 이용한 스카핑 장치 제어방법에 관한 것이다. The present invention relates to a scarping device and a scarping device control method using the same. More particularly, the present invention relates to a scarfing apparatus that removes scarf fusion spots by varying the spray height of high-pressure water in accordance with the bending height of a slab during a scarfing operation of the slab, and a scarfing apparatus control method using the scarfing apparatus.
일반적으로, 스카핑 공정은 연주공정에서 용강을 연속주조하여 생산되는 슬라브의 표면에 형성된 표면 흠을 제거하기 위한 공정이다. Generally, the scarfing process is a process for removing surface flaws formed on the surface of a slab produced by continuous casting of molten steel in a casting process.
이러한 스카핑 공정을 수행하는 스카핑 머신에는 고압의 산소, 가스, 질소, 공기, 고압수, 저압수, 순환수 등의 유틸리티가 제공될 수 있다. 여기서, 스카핑 작업은 산소와 가스의 불꽃반응에 의한 화염으로 슬라브 표면을 가열하고 용융 산화시킨 후 고압에어를 분사함으로써 이루어지고, 그 결과 슬라브의 표면 흠을 제거한다.Scarping machines that perform this scarping process may be provided with utilities such as high pressure oxygen, gas, nitrogen, air, high pressure water, low pressure water, and circulating water. Here, the scarping operation is performed by heating the slab surface with a flame caused by a flame reaction of oxygen and gas, and melting and oxidizing the high-pressure air, thereby removing surface flaws in the slab.
한편, 청정강 생산을 위한 스카핑 대상인 슬라브는 제철소 연주공정에서 주조되고 야드(YARD)의 베드(BED)에서 냉각될 수 있다. On the other hand, slabs to be scarfed for the production of clean steel can be cast in a steel making process and cooled in a bed of YARD.
도 1 내지 도 3을 참조하면, 스카핑 작업을 수행하기 위한 스카핑 머신(2)은 스모크 후드(3)의 내부에 위치하고 슬라브(20)는 그의 일측면이 포지셔너(5)가 고정된 포지셔닝 롤러(6)측에 밀착된 상태로 롤러 테이블의 이송롤러(4) 상에 장착될 수 있다. 1 to 3, a
그리고, 핀치롤(7)이 하강하고 포지셔너(5)의 후진이 완료된 후 핀치롤(7)이 구동됨으로써 슬라브(20)는 스카핑 머신(2)으로 진행한다. After the
슬라브(20)가 유니트(8)의 하부에 정지되면, 일정한 작업 시이퀀스에 의해 스카핑 작업이 수행된다. 즉, 슬라브(20)가 예열위치(Closing Position)에 정지하면, 유니트(8)는 슬라브(20)의 표면 및 측면 모서리부를 예열하고 압축에어를 송풍하여 슬라브(20)의 표면 흠을 제거한다.When the
한편, 스카핑 머신(2)에서 순환수 펌프의 펌핑으로 유동하는 유체는 일정한 관로를 따라 스카핑 머신(2)의 상부 및 측면에 제공된 매니폴드(12, 13)를 경유하여 유니트(8) 및 슈(9)에 공급되고 또한 스카핑 머신(2)에 설치되어 있는 유틸리티라인(Utility Line; 10)의 내부에 제공된 일정한 관로를 따라 탱크(미도시)로 복귀된다. 이때, 각종 유틸리티 라인(10)에 설치되어 있는 계기류 및 센서류와 압력게이지 등이 정상상태를 유지하여야 하며 스카핑 작업시 발생되는 분진과 용융 및 비산 스케일은 전기집진기에 집진된 후 스모크 후드(3)의 내부에 제공된 유로를 따라 물과 함께 스케일 피트에 모여지게 된다.On the other hand, the fluid flowing in the
한편, 상술 된 바와 같은 스카핑 작업시 슬라브(20)의 표면 및 측면으로부터 하방으로 흘러내리는 용융물이 슬라브(20)의 후면의 모서리부 표면 및 비스카핑 구역의 측면에 융착되어 스카핑 스케일(11, 스카핑 융착설)을 형성한다. 이러한 스카핑 스케일(11)은, 비록 발생량에 있어서 슬라브(20)의 냉각온도, 스카핑 스피드, 작업자의 작업 방식 등에 따라 경미한 차이가 있으나, 청정강의 품질을 저하시키므로 제거되어야 한다.On the other hand, the melts flowing downward from the surface and the side surface of the
또한, 슬라브(20)의 표면 흠 검사작업의 어려움 및 스카핑 스케일(11)의 제거작업시 잔류하는 스카핑 스케일(11)은 화상 및 찰과상 등의 안전재해 위험요인으로 잠재하게 된다.In addition, the
또한, 스카핑 융착설의 제거작업 불량으로 인해 잔류하는 스카핑 스케일(11)은 설비에 낙하되고 이로 인해 설비 트라블 및 센서 오작동의 원인으로 대두되어 설비의 휴지시간 발생으로 인한 정비비용의 상승 및 청정강 생산지연으로 인한 납기지연의 문제점을 초래하게 된다.In addition, since the
예컨데, 스카핑 스케일(11)은 설비 내 스모크 후드(3) 융착 및 주변 설비에 쌓여 수로 막힘 초래, 및 그에 따른 설비 트러블을 발생시킨다. For example, the
또한, 미제거된 스카핑 스케일(11)은 슬라브 표면 정정 처리시 슬라브 표면품질(후공정 압연과정에서 에지 스캡(Edge Scab), 블랙라인(Black Line) 등의 품질 결함의 원인이 되고 있다. In addition, the scraped
즉, 스카핑시 발생되는 스카핑 스케일(11)은 덩어리 발생, 스카핑 스케일(11)에 의한 슬라브(20)의 표면 품질 저하, 수로 막힘으로 인한 작업지연 및 작업자 스케일 덩어리 제거작업으로 인한 안전사고 위험 발생 요인 및 생산성 저하 발생원인이 되고 있다. 이로 인해 주변 설비 내에 덩어리가 융착됨에 따라 이를 제거하기 위한 안전사고 위험성, 작업 리드타임 지연 및 작업자 안전, 설비 트러블 개선이 요구되고 있는 실정이다. That is, the
이와 관련된 발명으로는 본 출원인의 실용신안공보 제20-1995-0003993호(1995.05.18)인 '연속주조 슬라브 용삭 덧살의 제거장치'가 있다. The related invention is disclosed in Applicant's Utility Model No. 20-1995-0003993 (1995.05.18) of the present applicant, which is a device for removing continuous cast slabs.
본 발명이 이루고자 하는 기술적 과제는 상기한 문제점을 해결하기 위한 것으로서, 피스톤에 가해지는 압력을 가변할 수 있는 압력 가변형 스카핑 장치를 제공한다. SUMMARY OF THE INVENTION The present invention provides a pressure variable scarping device capable of varying a pressure applied to a piston.
그에 따라, 승압 부스터의 가동을 최소화하거나 가동을 정지시키고 전로가스를 발전소에 공급할 수 있는 압력 가변형 스카핑 장치를 제공한다. Accordingly, there is provided a pressure variable scarping apparatus capable of minimizing the operation of the booster booster or stopping the operation and supplying the converter gas to the power plant.
또한, 물을 이용하여 피스톤에 가해지는 압력을 가변시, 물의 유동 및 이동을 최소화할 수 있는 스카핑 장치를 제공한다. There is also provided a scarfing device capable of minimizing the flow and movement of water when varying the pressure applied to the piston using water.
실시예가 해결하고자 하는 과제는 이상에서 언급된 과제에 국한되지 않으며 여기서 언급되지 않은 또 다른 과제들은 아래의 기재로부터 당업자에게 명확하게 이해될 수 있을 것이다.The problems to be solved by the embodiments are not limited to the above-mentioned problems, and other problems not mentioned here can be clearly understood by those skilled in the art from the following description.
상기 과제는 실시예에 따라, 이송라인을 따라 슬라브를 이송시키는 이송부; 이송되는 상기 슬라브의 표면을 처리하는 스카핑 유닛; 상기 슬라브의 벤딩 높이를 감지하는 감지장치; 상기 슬라브를 향해 고압수를 분사하는 수평분사유닛; 및 서보 모터를 포함하며, 상기 감지장치의 신호에 따라, 상기 서보 모터는 상기 수평분사유닛을 회동시켜 고압수의 분사위치를 가변시키는 스카핑 장치에 의해 달성된다. According to an embodiment of the present invention, there is provided a conveying apparatus comprising: a conveying unit for conveying a slab along a conveying line; A scarifying unit for processing the surface of the slab being conveyed; A sensing device for sensing a bending height of the slab; A horizontal spray unit for spraying high-pressure water toward the slab; And a servomotor, wherein the servomotor rotates the horizontal spray unit according to a signal of the sensing device to vary the injection position of the high-pressure water.
바람직하게, 상기 감지장치에 의해 감지된 상기 슬라브의 벤딩 높이에 대한 정보를 기반으로 상기 고압수의 분사위치를 가변시키도록 상기 서보 모터를 제어하는 제어부를 더 포함할 수 있다. The controller may further include a controller for controlling the servo motor to vary the injection position of the high-pressure water based on the information about the bending height of the slab detected by the sensing device.
그리고, 상기 제어부는 상기 슬라브의 이동 속도를 고려하여 상기 서보 모터의 회전 속도를 제어할 수 있다. The control unit may control the rotation speed of the servo motor in consideration of the moving speed of the slab.
그리고, 상기 수평분사유닛은, T형 엘보; 상기 T형 엘보의 일측과 상기 서보 모터 사이에 배치되어 상기 서보 모터의 회전력을 상기 상기 T형 엘보에 전달하는 커플러; 상기 T형 엘보의 타측에 배치되는 플랜지부; 상기 고압수를 분사하는 원통 형상의 노즐; 및 상기 노즐과 상기 플랜지부 사이에 배치되는 연결배관을 포함하며, 상기 노즐의 중심(C2)은 상기 플랜지부의 중심(C1)에서 반지름 방향으로 이격되게 배치될 수 있다.The horizontal injection unit may include a T-shaped elbow; A coupler disposed between one side of the T-elbow and the servo motor for transmitting a rotational force of the servo motor to the T-elbow; A flange portion disposed on the other side of the T-shaped elbow; A cylindrical nozzle for spraying the high-pressure water; And a connection pipe disposed between the nozzle and the flange portion. The center C2 of the nozzle may be spaced radially from the center C1 of the flange portion.
그리고, 상기 수평분사유닛은 상기 커플러의 내부에 배치되는 원형플레이트를 더 포함할 수 있다.The horizontal injection unit may further include a circular plate disposed inside the coupler.
또한, 상기 노즐은 상기 서보 모터에 의해 상기 플랜지부의 중심(C1)을 기준으로 0도에서 90도까지 회동할 수 있다.Further, the nozzle can be rotated from 0 to 90 degrees with respect to the center (C1) of the flange by the servomotor.
그리고, 상기 감지장치는 상기 슬라브의 이송 방향에 반대방향으로 소정의 거리(L)만큼 상기 수평분사유닛에서 이격되게 배치될 수 있다.The sensing device may be spaced apart from the horizontal injection unit by a predetermined distance L in a direction opposite to the conveying direction of the slab.
바람직하게, 상기 감지장치는 레이저를 조사하는 발광부와 상기 발광부에서 조사되는 레이저를 수광하는 수광부를 포함할 수 있다.Preferably, the sensing device may include a light emitting unit for emitting a laser beam and a light receiving unit for receiving the laser beam emitted from the light emitting unit.
여기서, 상기 발광부는, 발광본체지지대; 상기 발광본체지지대에 상하로 이동가능하게 배치되는 발광본체; 및 상기 발광본체에 상하로 상호 이격되게 배치되는 복수 개의 발광 소자를 포함할 수 있다. Here, the light emitting unit may include: a light emitting body support; A light emitting body arranged to be movable up and down on the light emitting body support base; And a plurality of light emitting devices that are vertically spaced apart from each other in the light emitting body.
그리고, 상기 수광부는, 수광본체지지대; 상기 수광본체지지대에 상하로 이동가능하게 배치되는 수광본체; 및 상기 수광본체에 상하로 상호 이격되게 배치되는 복수 개의 수광 소자를 포함하며, 상기 수광 소자는 상기 발광 소자에서 조사되는 레이저를 수광하여 상기 슬라브의 벤딩 높이(H)를 감지할 수 있다.The light-receiving unit includes a light-receiving body support; A light receiving body arranged to be movable up and down on the light receiving body support; And a plurality of light receiving elements disposed on the light receiving body so as to be vertically spaced apart from each other, wherein the light receiving element receives a laser beam emitted from the light emitting element to sense a bending height (H) of the slab.
또한, 상기 노즐은 상기 연결배관에 착탈 가능하게 배치될 수 있다.In addition, the nozzle may be detachably disposed in the connection pipe.
또한, 상기 T형 엘보의 일측에 배치되어 상기 T형 엘보에 상기 고압수를 공급하는 공급배관을 더 포함할 수 있다.Further, it may further include a supply pipe arranged at one side of the T-elbow to supply the high-pressure water to the T-elbow.
여기서, 상기 공급배관은 플랙서블(Fledxible)한 재질로 형성될 수 있다.Here, the supply pipe may be formed of a flappable material.
한편, 상기 제어부는 상기 감지장치의 신호에 따라 상기 스카핑 유닛을 이동시킨 후 구동되게 할 수 있다.Meanwhile, the controller may move the scarping unit according to a signal of the sensing device, and then move the scarping unit.
상기 과제는 실시예에 따라, 스카핑 장치를 이용한 스카핑 장치 제어방법에 있어서, 스카핑 유닛으로 슬라브를 이송하는 단계; 감지장치를 이용하여 상기 슬라브의 벤딩 높이를 감지하는 단계; 스카핑 유닛을 이용하여 이송되는 상기 슬라브의 표면을 처리하는 단계; 수평분사유닛을 이용하여 상기 슬라브를 향해 고압수를 분사하는 단계; 및 서보 모터를 이용하여 상기 고압수의 분사 위치를 가변시키는 단계를 포함하며, 상기 감지장치의 신호에 따라, 상기 서보 모터는 상기 수평분사유닛을 회동시켜 고압수의 분사위치를 가변시키는 스카핑 장치 제어방법에 의해 달성된다.According to an embodiment of the present invention, there is provided a method of controlling a scarping apparatus using a scarping apparatus, the method comprising: transferring a slab to a scarping unit; Sensing a bending height of the slab using a sensing device; Treating the surface of the slab being conveyed using a scarifying unit; Spraying high-pressure water toward the slab using a horizontal injection unit; And varying the injection position of the high-pressure water by using a servo motor. According to a signal of the sensing device, the servomotor rotates the horizontal injection unit to change the injection position of the high-pressure water, Control method.
그리고, 상기 스카핑 유닛으로 슬라브를 이송하는 단계에서는 상기 스카핑 장치의 핀치롤의 회전 속도를 조절하여 상기 슬라브가 기 설정된 속도로 상기 스카핑 유닛을 향해 이동될 수 있다.In the step of transferring the slab to the scarping unit, the slab may be moved toward the scarifying unit at a predetermined speed by adjusting the rotational speed of the pinch roll of the scarifying unit.
그리고, 상기 슬라브의 이동 속도를 기반으로 상기 서보 모터의 회전 속도가 제어될 수 있다.The rotation speed of the servo motor can be controlled based on the moving speed of the slab.
상기와 같은 구성을 갖는 본 발명의 실시예에 따른 스카핑 장치 및 스카핑 장치 제어방법은 슬라브의 형상에 따라 고압수의 분사 높이를 가변시켜 슬라브에 융착된 스카핑 스케일을 효과적으로 제거할 수 있다.According to the scarfing apparatus and the scarping apparatus control method of the present invention having the above-described structure, the spray height of the high-pressure water can be varied according to the shape of the slab, thereby effectively removing the scarf scale welded to the slab.
즉, 상기 스카핑 장치 및 스카핑 장치 제어방법은 감지장치에서 감지된 슬라브의 벤딩 높이(H)를 기반으로 서보 모터를 제어하여 상기 고압수의 분사 높이를 제어함으로써, 슬라브에 융착된 스카핑 스케일을 효과적으로 제거할 수 있다. That is, the scarping device and the scarping device control method control the servo motor based on the bending height (H) of the slab detected by the sensing device to control the jetting height of the high-pressure water, Can be effectively removed.
또한, 슬라브의 벤딩 형상은 측면에서 볼 때, 완곡되게 굽혀진 형상이기 때문에, 노즐의 회전 속도를 조절하여 더욱 효과적으로 슬라브에 융착된 스카핑 스케일을 제거할 수 있다. Further, since the bending shape of the slab is a curved shape when viewed from the side, it is possible to remove the scaling scale fused to the slab more effectively by adjusting the rotation speed of the nozzle.
도 1은 스카핑 머신을 나타내는 정면도이고,
도 2는 스카핑 머신을 나타내는 후면도이고,
도 3은 스카핑 작업 후 슬라브에 생성된 스카핑 스케일을 나타내는 도면이고,
도 4는 본 발명의 실시예에 따른 스카핑 장치를 나타내는 도면이고,
도 5는 본 발명의 실시예에 따른 스카핑 장치의 스카핑 유닛, 감지장치 및 수평분사유닛을 나타내는 측면도이고,
도 6은 실시예에 따른 스카핑 장치에서 발생하는 수증기와 불꽃을 나타내는 도면이고,
도 7은 실시예에 따른 스카핑 장치에 배치되는 감지장치의 발광부와 수광부를 나타내는 도면이고,
도 8은 실시예에 따른 스카핑 장치에 배치되는 감지장치의 상하 이동을 나타내는 도면이고,
도 9는 실시예에 따른 스카핑 장치에 배치되는 감지장치에 의해 감지되는 슬라브를 나타내는 도면이고,
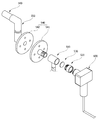
도 10 내지 도 12는 실시예에 따른 스카핑 장치의 수평분사유닛과 서보 모터를 나타내는 사시도, 분해사시도 및 측면도이고,
도 13은 실시예에 따른 스카핑 장치의 서보 모터에 의해 회동되는 수평분사유닛이 고압수를 분사하는 도면이고,
도 14는 실시예에 따른 스카핑 장치의 감지장치의 신호에 따라, 고압수의 분사 높이가 조절되는 관계를 나타내는 도면이고,
도 15는 실시예에 따른 스카핑 장치의 제어부의 제어관계를 나타내는 블럭도이고,
도 16은 실시예에 따른 스카핑 장치의 제어부를 나타내는 도면이고,
도 17은 실시예에 따른 스카핑 장치 제어방법을 나타내는 블럭도이다. 1 is a front view showing a scarping machine,
Figure 2 is a rear view showing the scarfing machine,
Figure 3 is a diagram showing scaling scales generated in a slab after a scarping operation,
4 is a view showing a scarping device according to an embodiment of the present invention,
5 is a side view showing a scarfing unit, a sensing device and a horizontal injection unit of a scarifying device according to an embodiment of the present invention,
6 is a view showing water vapor and flame generated in the scarifying apparatus according to the embodiment,
7 is a view showing a light emitting portion and a light receiving portion of the sensing device arranged in the scarping device according to the embodiment,
8 is a view showing the up-and-down movement of the sensing device arranged in the scarping device according to the embodiment,
9 is a view showing a slab sensed by a sensing device disposed in a scarping device according to an embodiment,
10 to 12 are a perspective view, an exploded perspective view and a side view showing the horizontal injection unit and the servo motor of the scarfing apparatus according to the embodiment,
13 is a view showing a state in which the horizontal injection unit rotated by the servomotor of the scarping apparatus according to the embodiment injects high pressure water,
14 is a view showing a relationship in which the jetting height of the high-pressure water is adjusted according to the signal of the sensing device of the scarifying device according to the embodiment,
15 is a block diagram showing the control relationship of the control unit of the scarping apparatus according to the embodiment,
16 is a view showing a control unit of the scarping apparatus according to the embodiment,
17 is a block diagram showing a scarping device control method according to the embodiment.
본 발명은 다양한 변경을 가할 수 있고 여러 가지 실시예를 가질 수 있는 바, 특정 실시예들을 도면에 예시하고 설명하고자 한다. 그러나, 이는 본 발명을 특정한 실시 형태에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변경, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다. The present invention is capable of various modifications and various embodiments, and specific embodiments are illustrated and described in the drawings. It should be understood, however, that the invention is not intended to be limited to the particular embodiments, but includes all modifications, equivalents, and alternatives falling within the spirit and scope of the invention.
제2, 제1 등과 같이 서수를 포함하는 용어는 다양한 구성요소들을 설명하는데 사용될 수 있지만, 상기 구성요소들은 상기 용어들에 의해 한정되지는 않는다. 상기 용어들은 하나의 구성요소를 다른 구성요소로부터 구별하는 목적으로만 사용된다. 예를 들어, 본 발명의 권리 범위를 벗어나지 않으면서 제2 구성요소는 제1 구성요소로 명명될 수 있고, 유사하게 제1 구성요소도 제2 구성요소로 명명될 수 있다. 및/또는 이라는 용어는 복수의 관련된 기재된 항목들의 조합 또는 복수의 관련된 기재된 항목들 중의 어느 항목을 포함한다. The terms including ordinal, such as second, first, etc., may be used to describe various elements, but the elements are not limited to these terms. The terms are used only for the purpose of distinguishing one component from another. For example, without departing from the scope of the present invention, the second component may be referred to as a first component, and similarly, the first component may also be referred to as a second component. And / or < / RTI > includes any combination of a plurality of related listed items or any of a plurality of related listed items.
어떤 구성요소가 다른 구성요소에 "연결되어" 있다거나 "접속되어" 있다고 언급된 때에는, 그 다른 구성요소에 직접적으로 연결되어 있거나 또는 접속되어 있을 수도 있지만, 중간에 다른 구성요소가 존재할 수도 있다고 이해되어야 할 것이다. 반면에, 어떤 구성요소가 다른 구성요소에 "직접 연결되어" 있다거나 "직접 접속되어" 있다고 언급된 때에는, 중간에 다른 구성요소가 존재하지 않는 것으로 이해되어야 할 것이다. It is to be understood that when an element is referred to as being "connected" or "connected" to another element, it may be directly connected or connected to the other element, . On the other hand, when an element is referred to as being "directly connected" or "directly connected" to another element, it should be understood that there are no other elements in between.
본 출원에서 사용한 용어는 단지 특정한 실시예를 설명하기 위해 사용된 것으로, 본 발명을 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 출원에서, "포함하다" 또는 "가지다" 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.The terminology used in this application is used only to describe a specific embodiment and is not intended to limit the invention. The singular expressions include plural expressions unless the context clearly dictates otherwise. In the present application, the terms "comprises" or "having" and the like are used to specify that there is a feature, a number, a step, an operation, an element, a component or a combination thereof described in the specification, But do not preclude the presence or addition of one or more other features, integers, steps, operations, elements, components, or combinations thereof.
다르게 정의되지 않는 한, 기술적이거나 과학적인 용어를 포함해서 여기서 사용되는 모든 용어들은 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자에 의해 일반적으로 이해되는 것과 동일한 의미를 가지게 된다. 일반적으로 사용되는 사전에 정의되어 있는 것과 같은 용어들은 관련 기술의 문맥상 가지는 의미와 일치하는 의미를 가지는 것으로 해석되어야 하며, 본 출원에서 명백하게 정의하지 않는 한, 이상적이거나 과도하게 형식적인 의미로 해석되지 않는다.Unless otherwise defined, all terms used herein, including technical or scientific terms, have the same meaning as commonly understood by one of ordinary skill in the art to which this invention belongs. Terms such as those defined in commonly used dictionaries are to be interpreted as having a meaning consistent with the contextual meaning of the related art and are to be interpreted as either ideal or overly formal in the sense of the present application Do not.
이하, 첨부된 도면을 참조하여 실시예를 상세히 설명하되, 도면 부호에 관계없이 동일하거나 대응하는 구성 요소는 동일한 참조 번호를 부여하고 이에 대한 중복되는 설명은 생략하기로 한다.Hereinafter, embodiments will be described in detail with reference to the accompanying drawings, wherein like or corresponding elements are denoted by the same reference numerals, and redundant description thereof will be omitted.
슬라브(20)의 스카핑 작업시, 본 발명의 실시예에 따른 스카핑 장치(1)는 슬라브(20)의 형상을 감지하고, 슬라브(20)의 형상에 따라 고압수의 분사 높이를 가변시켜 슬라브(20)에 융착된 스카핑 스케일(11)을 효과적으로 제거할 수 있다.The scarfing
상기 스카핑 장치(1)는 슬라브(20)의 벤딩 형상에 따라 슬라브(20)의 측면(21)에서 이격되어 분사되는 고압수의 분사 높이를 가변시켜 슬라브(20)의 측면(21) 또는 상면(22)에 융착된 스카핑 스케일(11)을 제거할 수 있다. The
특히, 상기 스카핑 장치(1)는 슬라브(20)의 형상 중 벤딩 높이(H)에 대응하여 가변적으로 슬라브(20)의 상면(22)으로 분사되는 고압수의 분사 높이를 조절하여 슬라브(20)에 융착된 스카핑 스케일(11)을 효과적으로 제거할 수 있다.Particularly, the
도 4 내지 도 16을 참조하여 살펴보면, 상기 스카핑 장치(1)는 슬라브(20)를 이송라인을 따라 이송시키는 이송부(100), 슬라브(20)의 이송라인 상에 배치되는 프레임(200), 프레임(200)에 배치되는 스카핑 유닛(300), 감지장치(400), 슬라브(20)의 측면측을 향해 고압수를 분사하는 수평분사유닛(500), 수평분사유닛(500)를 회동시키는 서보 모터(600), 수평분사유닛(500)에 물을 공급하는 공급배관(700) 및 제어부(800)를 포함할 수 있다. 여기서, 제어부(800)는 이송부(100), 스카핑 유닛(300), 감지장치(400) 및 서보 모터(600)를 제어할 수 있다. 4 to 16, the scarifying
이송부(100)는 다수 개의 롤러(110)와 핀치롤(120)을 포함할 수 있다. 그리고, 회전하는 롤러(110)에 의하여 슬라브(20)는 이송라인을 따라 이동된다. The
핀치롤(120)은 슬라브(20)를 일정 속도로 이동시키는 장치이다. The
핀치롤(120)은, 도 4 및 도 5에 도시된 바와 같이, 슬라브(20)의 이송을 기준으로 프레임(200)의 전방과 후방에 각각 배치될 수 있다. 여기서, 핀치롤(120)은 원기둥 형상으로 슬라브(20)의 폭 방향에 대응되는 길이로 형성될 수 있다.4 and 5, the pinch rolls 120 may be disposed on the front and rear sides of the
이에 따라, 일측의 핀치롤(120)은 슬라브(20)를 프레임(200) 내로 인입시키는 역할을 하고, 타측의 다른 핀치롤(120)은 프레임(200)을 통과하는 슬라브(20)를 외부로 인출시키는 역할을 한다. 이러한 핀치롤(120)은 상부롤과 하부롤로 이루어질 수도 있다. Accordingly, the
즉, 핀치롤(120)이 하강하고 구동함에 따라 슬라브(20)는 스카핑 유닛(300)을 향해 이동할 수 있다. 따라서, 슬라브(20)의 이동속도는 핀치롤(120)의 회전속도에 의해 조절될 수 있다. 그에 따라, 슬라브(20)의 이동속도는 핀치롤(120)의 회전속도를 통해 구할 수 있다. 여기서, 핀치롤(120)의 회전속도는 제어부(800)에 의해 제어될 수 있다. That is, as the
한편, 핀치롤(120)은 프레임(200)을 기준으로 전방 핀치롤(121)과 후방 핀치롤(122)로 구분될 수 있다.On the other hand, the
프레임(200)은 슬라브(20)의 이송라인 상에 배치될 수 있다. 그리고, 프레임(200)에는 스카핑 유닛(300)이 배치될 수 있는바, 프레임(200)은 스카핑 유닛(300)을 지지할 수 있다. The
스카핑 유닛(300)은 슬라브(20)의 표면을 처리할 수 있다. 여기서, 스카핑 유닛(300)은 구동장치(미도시)에 의해 상하좌우로 이동할 수 있다. 따라서, 스카핑 유닛(300)은 감지장치(400)에 의해 감지되는 슬라브(20)의 형상에 따라 제어부(800)에 의해 위치가 조절될 수 있다.The scarfing
스카핑 유닛(300)은 슬라브(20)에 고압의 산소와 연소가스(LNG 등)를 분사하여 슬라브(20) 표면을 용융시켜 슬라브(20)의 표면 결함을 제거할 수 있다. 예컨데, 슬라브(20)의 표면 결함으로는 슬라브(20)의 표면에 생성된 흠 등일 수 있다.The scarfing
즉, 스카핑 유닛(300)은 산소와 LNG 가스를 이용하여 슬라브(20)의 표면을 일정한 온도로 올려 용융시킨 후, 고압 산소를 이용하여 불어내어 상기 결함을 제거할 수 있다. That is, the scarifying
감지장치(400)는 슬라브(20)의 형상을 측정할 수 있다. 상세하게는, 감지장치(400)는 슬라브(20)의 벤딩 높이(H)를 감지할 수 있다. The
도 6에 도시된 바와 같이, 스카핑 작업에 의해 수증기와 불꽃이 생성되어 작업자는 시야를 확보하기 어렵다. 즉, 스카핑 작업에 따라 발생되는 불꽃에 의한 눈부심과 고온의 슬라브(20)에 고압수가 분사됨에 따라 생성되는 수증기에 의해 시야를 확보하기가 매우 어렵다. As shown in Fig. 6, steam and flame are generated by the scarping operation, and it is difficult for the operator to secure a field of view. That is, it is very difficult to ensure the visibility due to the glare caused by the flame generated by the scarping operation and the steam generated as the high-pressure water is sprayed to the high-
따라서, 감지장치(400)는 레이저를 슬라브(20)의 측면(21)측을 향해 조사하여 슬라브(20)의 벤딩 높이(H)를 감지할 수 있다. 이때, 감지장치(400)는, 도 5에 도시된 바와 같이, 수평분사유닛(500)과 소정의 거리(L)만큼 떨어져 전방에 이격되게 배치될 수 있다. Therefore, the
즉, 감지장치(400)는 슬라브(20)의 이송방향에 반대방향으로 소정의 거리(L)만큼 떨어져 배치될 수 있다. That is, the
따라서, 제어부(800)는 감지장치(400)를 지나면서 감지되는 슬라브(20)의 일 영역이 수평분사유닛(500)에 도달하는 시간을 고려하여 수평분사유닛(500)에 의한 고압수의 분사높이를 조절할 수 있다. Accordingly, the
예컨데, 제어부(400)는 슬라브(20)의 이동 속도와 이격 거리(L)를 고려하여 수평분사유닛(500)에 의한 고압수의 분사높이를 조절할 수 있다. 그에 따라, 수평분사유닛(500)은 슬라브(20)에 융착된 스카핑 스케일(11)을 효과적으로 제거할 수 있다.For example, the
감지장치(400)는 슬라브(20)를 사이에 두고 배치되는 레이저를 조사하는 발광부(410)와 조사된 레이저를 수광하는 수광부(420)를 포함할 수 있다. 발광부(410)와 수광부(420) 각각은 슬라브(20)를 사이에 두고 상호 마주보게 설치될 수 있다. 이때, 발광부(410)와 수광부(420) 각각은 슬라브(20)의 측면(21)과 이격되게 배치될 수 있다.The
여기서, 발광부(410)는 수광부(420)를 향해 레이저를 조사하고, 조사된 레이저는 수광부(420)에 의해 수광된다. Here, the
도 7을 참조하여 살펴보면, 발광부(410)는 발광본체(411), 발광본체지지대(412) 및 발광본체(411)에 배치되는 복수 개의 발광소자(413)를 포함할 수 있다. 7, the
발광본체(411)는 발광본체지지대(412)에 상하로 이동가능하게 배치될 수 있다. 그에 따라, 이송부(100)를 통해 이송되는 슬라브(20)의 두께에 대응하여 발광본체(411)의 높이는 조절될 수 있다. 예컨데, 이송부(100)를 통해 이송되는 슬라브(20)의 경우 슬라브(20)가 이용되는 제품마다 요구하는 두께가 상이할 수 있는바, 발광본체(411)의 높이를 조절하여 복수 개의 발광소자(413)가 슬라브(20)를 감지할 수 있는 기설정된 위치에 위치되게 할 수 있다.The light emission
발광소자(413)는 발광본체(411)에 배치되어 수광부(420)를 향해 레이저를 조사한다. The
복수 개의 발광소자(413) 각각은 상하로 기 설정된 이격 간격(d)에 따라 배치될 있다. 여기서, 복수 개의 발광소자(413) 각각은, 도 6에 도시된 바와 같이, 아래부터 제1 발광소자(413a), 제2 발광소자(413b) 및 제3 발광소자(413c)를 포함할 수 있다. 본 발명의 복수 개의 발광소자(413)에 있어서, 동일한 이격 간격(d)으로 배치된 것을 그 예로 하고 있으나 반드시 이에 한정되는 것은 아니며, 제1 발광소자(413a)와 제2 발광소자(413b)의 이격 간격과 제2 발광소자(413b)와 제3 발광소자(413c)의 이격 간격은 상호 다르게 배치될 수 있음은 물론이다. Each of the plurality of light emitting
이때, 제1 발광소자(413a)는 벤딩이 형성되지 않은 슬라브(20)의 상면과 동일한 높이에 위치하도록 발광본체(411)의 높이는 조절될 수 있다. At this time, the height of the light emitting
나아가, 슬라브(20)에 벤딩 형상이 마련된 경우라도 제1 발광소자(413a)는 슬라브(20)의 헤드부측 상면 모서리와 동일한 높이에 위치하도록 발광본체(411)의 높이는 조절될 수도 있다. 여기서, 상기 헤드부는 슬라브(20)의 이송방향을 기준으로 슬라브(20)의 전방 영역을 의미한다.The height of the light emitting
도 6을 참조하여 살펴보면, 수광부(420)는 수광본체(421), 수광본체지지대(422) 및 수광본체(421)에 배치되는 복수 개의 수광소자(423)를 포함할 수 있다. 6, the
수광본체(421)는 수광본체지지대(422)에 상하로 이동가능하게 배치될 수 있다. 그에 따라, 도 8에 도시된 바와 같이, 이송부(100)를 통해 이송되는 슬라브(20)의 두께에 대응하여 수광본체(421)의 높이는 조절될 수 있다. 예컨데, 이송부(100)를 통해 이송되는 슬라브(20)의 경우 슬라브(S)가 이용되는 제품마다 상이할 수 있는바, 수광본체(421)의 높이를 조절하여 복수 개의 수광소자(423)가 기 설정된 위치에 위치되게 할 수 있다.The light receiving
수광소자(423)는 수광본체(421)에 배치되어 수광부(420)를 향해 조사된 레이저를 수광한다. 그리고, 수광소자(423)는 발광소자(413)에 대응되게 배치될 수 있다.The
복수 개의 수광소자(423) 각각은 상하로 기 설정된 이격 간격(d)에 따라 배치될 있다. 여기서, 복수 개의 수광소자(423) 각각은, 도 6에 도시된 바와 같이, 아래부터 제1 수광소자(423a), 제2 수광소자(423b) 및 제3 수광소자(413c)를 포함할 수 있다. 본 발명의 복수 개의 수광소자(423)에 있어서, 동일한 이격 간격(d)으로 배치된 것을 그 예로 하고 있으나 반드시 이에 한정되는 것은 아니며, 제1 수광소자(423a)와 제2 수광소자(423b)의 이격 간격과 제2 수광소자(423b)와 제3 수광소자(413c)의 이격 간격은 상호 다르게 배치될 수 있음은 물론이다. Each of the plurality of light-receiving
이때, 제1 수광소자(423a)는 벤딩이 형성되지 않은 슬라브(20)의 상면과 동일한 높이에 위치하도록 수광본체(421)의 높이는 조절될 수 있다.At this time, the height of the
나아가, 슬라브(20)에 벤딩 형상이 마련된 경우라도 제1 수광소자(423a)는 슬라브(20)의 헤드부측 상면 모서리와 동일한 높이에 위치하도록 수광본체(421)의 높이는 조절될 수도 있다. The height of the
그리고, 제1 발광소자(413a)는 제1 수광소자(423a)와 동일한 높이에 배치되고, 제2 발광소자(413b)는 제2 수광소자(423b)와 동일한 높이에 배치되며, 제3 발광소자(413c)는 제3 수광소자(413c)와 동일한 높이에 배치될 수 있다. The first
따라서, 제1 수광소자(423a), 제2 수광소자(423b) 및 제3 수광소자(413c) 각각에서 수광되는 레이저의 감지에 따라 슬라브(20)의 벤딩 높이(H)는 결정될 수 있다. Therefore, the bending height H of the
도 9는 실시예에 따른 스카핑 장치에 배치되는 감지장치에 의해 감지되는 슬라브를 나타내는 도면으로서, 도 9의 (a)는 정상 상태의 슬라브를 나타내는 도면이고, 도 9의 (b)는 하향으로 벤딩된 슬라브를 나타내는 도면이고, 도 9의 (c)는 상향으로 벤딩된 슬라브를 나타내는 도면이다. FIG. 9 is a view showing a slab detected by a sensing device disposed in a scarfing device according to an embodiment. FIG. 9 (a) is a view showing a slab in a steady state, and FIG. 9 FIG. 9C is a view showing a slab bending upward; FIG.
도 9의 (a)를 참조하여 살펴보면, 제2 수광소자(423b) 및 제3 수광소자(413c)만 레이저를 감지하게 된다. 그에 따른 감지장치(400)의 신호에 따라, 제어부(800)는 이송되는 슬라브(20)가 정상 상태(벤딩이 형성되지 않은 슬라브)임을 판단할 수 있다. Referring to FIG. 9A, only the second
도 9의 (b)를 참조하여 살펴보면, 제3 수광소자(413c)만 레이저를 감지하게 된다. 그에 따른 감지장치(400)의 신호에 따라, 제어부(800)는 이송되는 슬라브(20)의 벤딩 높이(H)를 판단할 수 있다. 예컨데, 도 8의 (b)에 도시된 바와 같이, 감지장치(400)는 하향 벤딩된 슬라브(20)의 벤딩 높이(H)를 감지할 수 있다.Referring to FIG. 9 (b), only the third
도 9의 (c)를 참조하여 살펴보면, 수광소자(413) 모두가 레이저를 감지하지 못하는 경우가 발생될 수 있다. 그에 따른 감지장치(400)의 신호에 따라, 제어부(800)는 이송되는 슬라브(20)의 벤딩 높이(H)를 판단할 수 있다. 예컨데, 도 9의 (c)에 도시된 바와 같이, 감지장치(400)는 상향 벤딩된 슬라브(20)의 벤딩 높이(H)를 감지할 수 있다.Referring to FIG. 9C, all of the
본 발명의 감지장치(400)는 세 개의 발광소자(413)와 수광소자(423)를 구비하는 것을 그 예로 하고 있으나 반드시 이에 한정되는 것은 아니며, 정밀한 슬라브(20)의 형상 감지를 위해 더 많은 발광소자(413)와 수광소자(423)가 구비될 수 있음은 물론이다. Although the
수평분사유닛(500)은 고압수를 분사하여 슬라브(20)에 융착된 스케일(11)을 효과적으로 제거할 수 있다. 이때, 수평분사유닛(500)의 고압수 분사 높이는 감지장치(400)의 신호를 수신한 제어부(800)에 의해 제어될 있다. The
도 10 내지 도 12를 참조하여 살펴보면, 수평분사유닛(500)은 T형 엘보(510), 커플러(520), 원형플레이트(530), 플랜지부(540), 연결배관(550) 및 노즐(560)을 포함할 수 있다.10 to 12, the
T형 엘보(510)의 일측과 서보 모터(600) 사이에는 커플러(520)가 배치될 수 있다. 그리고, T형 엘보(510)의 하측에는 T형 엘보(510)로 물을 공급하는 공급배관(700)이 배치될 수 있다. A
커플러(520)는 서보 모터(600)의 회동력을 T형 엘보(510)에 전달할 수 있다. 여기서, 커플러(520)는 원통 형상으로 형성될 수 있으며, 일측 외주면에 나사산이 형성될 수 있다. The
즉, 커플러(520)는 T형 엘보(510)와 서보 모터(600)를 연결하는 부재로서, T형 엘보(510)와 서보 모터(600) 각각과 나사 결합을 할 수 있다. That is, the
그에 따라, 커플러(520)는 서보 모터(600)의 회전력을 T형 엘보(510)에 전달할 수 있다. 또한, 커플러(520)는 T형 엘보(510)와 서보 모터(600) 사이에 착탈 가능하게 배치되기 때문에 유지 또는 보수를 용이하게 할 수 있다. Accordingly, the
원형플레이트(530)는 커플러(530) 내부에 배치될 수 있다. T형 엘보(510)로 물을 공급될 때, 원형플레이트(530)는 공급된 물이 서보 모터(600)로 이송되는 것을 방지할 수 있다.The
플랜지부(540)는 노즐(560)의 회동시 중심축으로서의 역할을 수행할 수 있다. The
여기서, 플랜지부(540)는 제1 플랜지(541)와 제2 플랜지(542)를 포함할 수 있다. 그리고, 제1 플랜지(541)와 제2 플랜지(542)는 볼트, 너트와 같은 고정부재(543)에 의해 서로 고정될 수 있다. 그에 따라, 유지 및 보수 시, 고정부재(543)를 분리하여 제1 플랜지(541)와 제2 플랜지(542)를 분리할 수 있다. Here, the
제1 플랜지(541)의 일측은 T형 엘보(510)의 일측과 나사 결합을 할 수 있다. 그리고, 제1 플랜지(541)의 일측은 연결배관(550)과 용접 등의 방식을 통해 연결될 수 있다. One side of the
연결배관(550)은 플랜지부(540)와 노즐(560) 사이에 배치될 수 있다. 도 12에 도시된 바와 같이, 연결배관(550)은 ㄱ자 형상의 엘보를 이용하여 플랜지부(540)의 중심(C1)에서 이격되게 노즐(560)의 중심(C2)이 배치되게 할 수 있다.The
그리고, 연결배관(550)을 통해 고압수는 노즐(560)로 공급될 수 있다. The high-pressure water can be supplied to the
노즐(560)은 상기 고압수를 슬라브(20)에 분사할 수 있다. 그리고, 노즐(560)은 연결배관(550)에 착탈 가능하게 배치될 수 있다. 그에 따라, 노즐(560)의 노후화 또는 보수 필요시, 노즐(560)을 용이하게 교체할 수 있다. The
여기서, 노즐은 원통 형상으로 형성될 수 있으며, 일측 외주면에 나사산이 형성되어 연결배관(550)과 나사 결합을 할 수 있다.Here, the nozzle may be formed in a cylindrical shape, and a screw thread may be formed on one outer circumferential surface to be screwed to the
노즐(560)은 플랜지부(540)의 중심(C1)과 이격되게 배치될 수 있다. 즉, 노즐(560)은 플랜지부(540)의 중심(C1)을 기준으로 반지름 방향으로 기 설정된 이격거리(R)만큼 이격되게 배치될 수 있다. The
따라서, 서보 모터(600)가 플랜지부(540)를 회동시키면, 노즐(560)은, 도 12에 도시된 바와 같이, 플랜지부(540)의 중심(C1)을 기준으로 회동하게 된다. 그에 따라, 도 13에 도시된 바와 같이, 상기 고압수의 분사 높이가 가변되어 슬라브(20)에 융착된 스카핑 스케일(11)을 효과적으로 제거할 수 있다.Therefore, when the
여기서, 노즐(560)은 플랜지부(540)의 중심(C1)을 기준으로 0도부터 90도까지 회동할 수 있다. Here, the
서보 모터(600)는 커플러(520)를 통해 회전력을 T형 엘보(510)에 전달할 수 있다. 그리고, T형 엘보(510)의 회동에 연동된 플랜지부(540)의 회동에 따라, 노즐(560)은 플랜지부(540)의 중심(C1)을 기준으로 회동하며 상기 고압수의 분사 높이를 가변시킬 수 있다. 여기서, 상기 고압수의 분사 높이는 노즐(560)의 중심(C2)이 위치하는 높이일 수 있다. The
그리고, 서보 모터(600)는 제어부(800)에 의해 제어되는바, 감지장치(400)의 신호에 따라, 서보 모터(600)는 T형 엘보(510)의 회동시켜 상기 고압수의 분사 높이를 가변시킬 수 있다.The
도 14는 실시예에 따른 스카핑 장치의 서보 모터에 의해 회동되는 수평분사유닛이 고압수를 분사하는 도면으로서, 도 14의 (a)는 정상 상태의 슬라브에 대응하여 배치되는 노즐을 나타내는 도면이고, 도 14의 (b)는 하향으로 벤딩된 슬라브에 대응하여 30도 회동한 노즐을 나타내는 도면이고, 도 14의 (c)는 상향으로 벤딩된 슬라브에 대응하여 60도 회동한 노즐을 나타내는 도면이다. FIG. 14 is a view showing a nozzle for spraying high-pressure water sprayed by a horizontal spray unit rotated by a servomotor of a scarifying apparatus according to the embodiment, wherein FIG. 14 (a) is a view showing a nozzle arranged corresponding to a steady slab , FIG. 14 (b) is a view showing a nozzle rotated by 30 degrees corresponding to a downwardly bent slab, and FIG. 14 (c) is a view showing a nozzle rotated 60 degrees corresponding to a slab bent upward .
도 9의 (a) 및 도 14의 (a)를 참조하여 살펴보면, 벤딩이 형성되지 않은 정상 상태의 슬라브(20)가 감지장치(400)에 의해 감지되는 경우, 제어부(800)는 서보 모터(600)를 제어하여 노즐(560)이 플랜지부(540)의 중심(C1)을 기준으로 0도에 위치되게 한다. 이때, 노즐(560)은 슬라브(20)의 상면(22)을 향해 상기 고압수를 분사하여 슬라브(20)에 융착된 스카핑 스케일(11)을 효과적으로 제거할 수 있다.9A and FIG. 14A, when the
도 9의 (b) 및 도 14의 (b)를 참조하여 살펴보면, 하향 벤딩된 슬라브(20)가 감지장치(400)에 의해 감지되는 경우, 제어부(800)는 서보 모터(600)를 제어하여 노즐(560)이 플랜지부(540)의 중심(C1)을 기준으로 30도에 위치되게 한다. 이때, 노즐(560)은 벤딩된 슬라브(20)의 상면(22)을 향해 상기 고압수를 분사하여 슬라브(20)에 융착된 스카핑 스케일(11)을 효과적으로 제거할 수 있다.9B and 14B, when the downwardly
도 9의 (c) 및 도 14의 (c)를 참조하여 살펴보면, 상향 벤딩된 슬라브(20)가 감지장치(400)에 의해 감지되는 경우, 제어부(800)는 서보 모터(600)를 제어하여 노즐(560)이 플랜지부(540)의 중심(C1)을 기준으로 45도에 위치되게 한다. 이때, 노즐(560)은 벤딩된 슬라브(20)의 상면(22)을 향해 상기 고압수를 분사하여 슬라브(20)에 융착된 스카핑 스케일(11)을 효과적으로 제거할 수 있다.9 (c) and FIG. 14 (c), when the
상술 된 노즐(560)의 위치를 나타내는 각도 0도, 30도 45도는 감지장치(400)의 신호에 따라 임의적으로 설정된 회동각도이며, 설정에 따라 노즐(560)은 플랜지부(540)의 중심(C1)을 기준으로 0도에서 90도내의 어느 위치로 회동할 수 있음은 물론이다. 바람직하게, 발광소자(413) 및 수광소자(423) 각각의 이격 높이(d)에 대응되게 상기 고압수의 분사 높이를 고려하여 노즐(560)의 회동각도가 설정된다. An
한편, 서보 모터(600)는 커플러(520)에 착탈 가능하게 배치되는바, 서보 모터(600)의 유지 또는 보수를 용이하게 할 수 있다. On the other hand, the
공급배관(700)은 수평분사유닛(500)의 T형 엘보(510)에 고압수를 공급할 수 있다. 그에 따라, 수평분사유닛(500)의 노즐(560)을 통해 분사되는 상기 고압수는 슬라브(20)에 융착된 스카핑 스케일(11)을 효과적으로 제거할 수 있다.The
한편, 공급배관(700)에는 밸브(미도시)가 배치될 수 있다. 그리고, 상기 밸브는 제어부(800)에 의해 제어될 수 있다. 그에 따라, 제어부(800)는 공급배관(700)을 통해 수평분사유닛(500)에 공급되는 물의 공급 여부를 제어할 수 있다. On the other hand, a valve (not shown) may be disposed in the
여기서, 공급배관(700)은 플랙서블(Fledxible)한 재질로 형성될 수 있다. 예컨데, 공급배관(700)으로 플랙서블한 호스가 제공될 수 있다. 그에 따라, 서보 보터(600)에 의해 T형 엘보(510)가 회동하더라도 공급배관(700)의 손상이 방지될 수 있다. Here, the
도 15를 참조하여 살펴보면, 제어부(800)는 이송부(100)의 롤러(110)를 제어하여 슬라브(20)가 스카핑 유닛(300)을 향해 이동되게 할 수 있다. 또한, 제어부(800)는 이송부(100)의 롤러(110)를 제어하여 스카핑 공정이 완료된 슬라브(20)를 다음 공정으로 이송되게 할 수 있다. Referring to FIG. 15, the
또한, 제어부(800)는 이송부(100)의 핀치롤(120)을 제어할 수 있다. 따라서, 감지장치(400)에 의해 슬라브(20)의 전단이 감지되면 제어부(800)는 전방 핀치롤(121)을 제어하여 슬라브(20)를 프레임(200) 내로 인입시킬 수 있다. 이때, 제어부(800)는 감지장치(400)에 감지된 슬라브(20)의 위치를 기반으로 스카핑 유닛(300)을 이동시킨 후 구동시킬 수 있다. 그리고, 스카핑 작업 시작과 동시에 상기 고압수는 분사될 수도 있다 In addition, the
또한, 제어부(800)는 감지장치(400)에 감지된 슬라브(20)의 벤딩 높이(H)를 기반으로 서보 모터(600)를 제어하여 기 설정된 위치에 노즐(560)이 위치되게 한다. 그에 따라, 노즐(560)은 상기 고압수를 분사하여 슬라브(20)에 융착된 스카핑 스케일(11)을 효과적으로 제거할 수 있다.The
이때, 제어부(800)는 공급배관(700)에 배치된 상기 밸브를 제어하여 노즐(560)에 고압수가 공급되게 한다. At this time, the
또한, 제어부(800)는 스카핑 공정이 완료된 슬라브(20)를 인출하기 위해 후방 핀치롤(122)을 제어할 수 있다.In addition, the
그에 따라, 후방 핀치롤(122)에 인출된 슬라브(20)는 이송부(100)의 롤러(110)에 의해 다음 공정으로 이송될 수 있다.The
도 16을 참조하여 살펴보면, 제어부(800)는 상기 스카핑 장치(1)의 작업 공정을 시각적으로 나타내는 디스플레이부(810), 복수 개의 램프(820) 및 복수 개의 버튼(830)을 포함할 수 있다. 16, the
램프(820) 각각은 현재 노즐(560)의 회동 위치를 표시할 수 있다. 즉, 점등된 램프(820)는 노즐(560)에 의해 슬라브(20)를 향해 분사되는 상기 고압수의 분사높이를 나타낸다. Each of the
버튼(830)은 서보 모터(600)에 전기적 신호를 인가할 수 있다. 즉, 복수 개의 버튼(830) 중 어느 하나가 가압되는 경우, 가압 신호가 서보 모터(600)에 인가되고, 상기 신호에 의해 서보 모터(600)는 기 설정된 위치로 노즐(560)을 회동시킬 수 있다. The
한편, 상기 스카핑 장치(1)는 상기 고압수의 분사 높이가 가변되는 수평분사유닛(500)을 통해 슬라브(20)에 융착된 스카핑 스케일(11)을 효과적으로 제거하는 것을 그 예로 하고 있으나 반드시 이에 한정되는 것은 아니며, 수직분사유닛(미도시)를 더 구비하여 슬라브(20)에 융착된 스카핑 스케일(11)을 더욱 효과적으로 제거할 수 있다. 여기서, 상기 수직분사유닛은 슬라브(20)의 상면을 향해 고압수를 분사하는 장치일 수 있다. Although the
종합해보면, 상기 스카핑 장치(1)는 감지장치(400)에서 감지된 슬라브(20)의 벤딩 높이(H)를 기반으로 서보 모터(600)를 제어하여 상기 고압수의 분사 높이를 제어함으로써, 슬라브(20)에 융착된 스카핑 스케일(11)을 효과적으로 제거할 수 있다. The
이때, 슬라브(20)의 벤딩 형상에 따라, 상기 스카핑 장치(1)는 서보 모터(600)의 회전 속도를 제어하여 슬라브(20)에 융착된 스카핑 스케일(11)을 더욱 효과적으로 제거할 수 있다. At this time, depending on the bending shape of the
이하, 도 17을 참조하여 상기 스카핑 장치(1)를 이용한 스카핑 장치 제어방법에 대하여 살펴보기로 한다.Hereinafter, a scarping device control method using the
본 발명의 실시예에 따른 스카핑 장치 제어방법(S1)을 설명함에 있어서, 상기 스카핑 장치(1)의 구성요소는 동일한 도면 부호로 기재되는바, 이에 대한 자세한 설명은 생략하기로 한다. In describing the scarping device control method S1 according to the embodiment of the present invention, the components of the
상기 스카핑 장치 제어방법(S1)은 슬라브(20)의 형상을 감지하고, 슬라브(20)의 형상에 따라 고압수의 분사 높이를 가변시켜 슬라브(20)에 융착된 스카핑 스케일(11)을 효과적으로 제거하도록 상기 스카핑 장치(1)를 제어한다. The scarping device control method S1 senses the shape of the
도 17을 참조하여 살펴보면, 상기 스카핑 장치 제어방법(S1)은 스카핑 유닛으로 슬라브를 이송하는 단계(S10), 감지장치를 이용하여 상기 슬라브의 벤딩 높이를 감지하는 단계(S20), 스카핑 유닛을 이용하여 이송되는 상기 슬라브의 표면을 처리하는 단계(S30), 수평분사유닛을 이용하여 상기 슬라브를 향해 고압수를 분사하는 단계(S40) 및 서보 모터를 이용하여 상기 고압수의 분사 위치를 가변시키는 단계(S50)를 포함할 수 있다. Referring to FIG. 17, the scarping device control method S1 includes a step S10 of transferring a slab to a scarping unit, a step S20 of sensing a bending height of the slab using a sensing device, (S30) of spraying high-pressure water toward the slab using a horizontal spraying unit (S40), and a step (S40) of spraying high-pressure water using the servo motor (S50). ≪ / RTI >
스카핑 유닛으로 슬라브를 이송하는 단계(S10)에서는 이송부(100)의 다수 개의 롤러(110)와 핀치롤(120)를 이용하여 슬라브(20)를 이송라인을 따라 스카핑 유닛(300)을 이동시킨다. In the step S10 of transferring the slab to the scarifying unit, the
이때, 스카핑 유닛(300)으로 이송되는 슬라브(20)의 이송 속도는 핀치롤(120)의 회전 속도에 의해 조절될 수 있다. 따라서, 제어부(800)가 핀치롤(120)의 회전 속도를 조절하여 기 설정된 속도로 슬라브(20)가 스카핑 유닛(300)을 향해 이동되게 할 수 있다.At this time, the conveyance speed of the
감지장치를 이용하여 상기 슬라브의 벤딩 높이를 감지하는 단계(S20)에서는 레이저를 이용하여, 상술 된 바와 같이, 슬라브의 벤딩 높이(H)를 감지한다.In the step S20 of sensing the bending height of the slab using the sensing device, the bending height H of the slab is sensed using a laser as described above.
스카핑 유닛을 이용하여 이송되는 상기 슬라브의 표면을 처리하는 단계(S30)에서는 슬라브(20)에 고압의 산소와 연소가스(LNG 등)를 분사하여 슬라브(20) 표면을 용융시켜 슬라브(20)의 표면 결함을 제거할 수 있다. 이때, 스카핑 유닛(300)은 감지장치(400)에 의해 감지되는 슬라브(20)의 형상에 따라 제어부(800)에 의해 위치가 조절될 수 있다.In the step S30 of treating the surface of the slab transported by using the scarfing unit, high-pressure oxygen and combustion gas (LNG or the like) are injected into the
수평분사유닛을 이용하여 상기 슬라브를 향해 고압수를 분사하는 단계(S40)에서는 공급배관(700)을 통해 공급되는 고압수를 노즐(560)을 이용하여 슬라브(20)에 분사한다. 그에 따라, 상기 고압수는 스카핑 작업에 의해 슬라브(20)에 융착된 스카핑 스케일(11)을 효과적으로 제거할 수 있다.In the step S40 of spraying the high-pressure water toward the slab using the horizontal injection unit, the high-pressure water supplied through the
서보 모터를 이용하여 상기 고압수의 분사 위치를 가변시키는 단계(S50)에서는, 상술된 바와 같이, 상기 벤딩 높이(H)를 기반으로 플랜지부(560)와 이격되게 배치되는 노즐(560)의 분사 높이를 서보 모터(600)의 회전력을 이용하여 조절한다. 그에 따라, 상기 분사 높이는 슬라브(20)의 형상에 대응하여 가변될 수 있다. In the step S50 of varying the injection position of the high-pressure water using the servo motor, as described above, the injection of the
이때, 슬라브(20)의 이동 속도를 기반으로 서보 모터(600)의 회전 속도는 조절될 수 있다. 그에 따라, 노즐(560)의 회전 속도 또한 조절될 수 있다. 즉, 슬라브(20)의 벤딩 형상은 측면에서 볼 때, 완곡되게 굽혀진 형상이기 때문에, 노즐(560)의 회전 속도를 조절하여 효과적으로 슬라브(20)에 융착된 스카핑 스케일(11)을 제거할 수 있다. At this time, the rotational speed of the
상기에서는 본 발명의 바람직한 실시예를 참조하여 설명하였지만, 해당 기술 분야의 숙련된 당업자는 하기의 특허 청구의 범위에 기재된 본 발명의 사상 및 영역으로부터 벗어나지 않는 범위 내에서 본 발명을 다양하게 수정 및 변경시킬 수 있음을 이해할 수 있을 것이다. It will be apparent to those skilled in the art that various modifications and variations can be made in the present invention without departing from the spirit or scope of the present invention as defined by the following claims It can be understood that
1 : 스카핑 장치 20 : 슬라브
100 : 이송부 110 : 롤러
120 : 핀치롤
200 : 프레임
300 : 스카핑 유닛
400 : 감지장치 410 : 발광부
420 : 수광부
500 : 수평분사유닛 510 : T형 엘보
520 : 커플러 530 : 원형플레이트
540 : 플랜지부 550 : 연결배관
560 : 노즐
600 : 서보 모터
700 : 공급배관
800 : 제어부
S : 스카핑 장치 제어방법1: scarping device 20: slab
100: Feeder 110: Roller
120: pinch roll
200: frame
300: Scaping unit
400: sensing device 410:
420:
500: Horizontal injection unit 510: T-shaped elbow
520: coupler 530: circular plate
540: flange portion 550: connection piping
560: Nozzles
600: Servo motor
700: Supply piping
800:
S: How to control the scarping device
Claims (17)
이송되는 상기 슬라브의 표면을 처리하는 스카핑 유닛;
상기 슬라브의 벤딩 높이를 감지하는 감지장치;
상기 슬라브를 향해 고압수를 분사하는 수평분사유닛; 및
서보 모터를 포함하며,
상기 감지장치의 신호에 따라, 상기 서보 모터는 상기 수평분사유닛을 회동시켜 고압수의 분사위치를 가변시키는 스카핑 장치. A conveyance part for conveying the slab along the conveyance line;
A scarifying unit for processing the surface of the slab being conveyed;
A sensing device for sensing a bending height of the slab;
A horizontal spray unit for spraying high-pressure water toward the slab; And
A servo motor,
Wherein the servo motor rotates the horizontal spray unit to vary the injection position of the high-pressure water according to a signal of the sensing device.
상기 감지장치에 의해 감지된 상기 슬라브의 벤딩 높이에 대한 정보를 기반으로 상기 고압수의 분사위치를 가변시키도록 상기 서보 모터를 제어하는 제어부를 더 포함하는 스카핑 장치.The method according to claim 1,
Further comprising a control unit for controlling the servomotor to vary the injection position of the high-pressure water based on information about the bending height of the slab detected by the sensing device.
상기 제어부는 상기 서보 모터의 회전 속도를 제어하는 스카핑 장치.3. The method of claim 2,
And the control unit controls the rotation speed of the servo motor.
상기 수평분사유닛은,
T형 엘보;
상기 T형 엘보의 일측과 상기 서보 모터 사이에 배치되어 상기 서보 모터의 회전력을 상기 상기 T형 엘보에 전달하는 커플러;
상기 T형 엘보의 타측에 배치되는 플랜지부;
상기 고압수를 분사하는 원통 형상의 노즐; 및
상기 노즐과 상기 플랜지부 사이에 배치되는 연결배관을 포함하며,
상기 노즐의 중심(C2)은 상기 플랜지부의 중심(C1)에서 반지름 방향으로 이격되게 배치되는 스카핑 장치. The method of claim 3,
Wherein the horizontal injection unit comprises:
T-type elbow;
A coupler disposed between one side of the T-elbow and the servo motor for transmitting a rotational force of the servo motor to the T-elbow;
A flange portion disposed on the other side of the T-shaped elbow;
A cylindrical nozzle for spraying the high-pressure water; And
And a connecting pipe disposed between the nozzle and the flange portion,
Wherein a center (C2) of the nozzle is spaced apart in the radial direction from a center (C1) of the flange portion.
상기 커플러의 내부에 배치되는 원형플레이트를 더 포함하는 스카핑 장치.5. The method of claim 4,
And a circular plate disposed within the coupler.
상기 노즐은 상기 서보 모터에 의해 상기 플랜지부의 중심(C1)을 기준으로 0도에서 90도까지 회동하는 스카핑 장치.5. The method of claim 4,
Wherein the nozzle is rotated from 0 to 90 degrees with respect to the center (C1) of the flange by the servomotor.
상기 감지장치는 상기 슬라브의 이송 방향에 반대방향으로 소정의 거리(L)만큼 상기 수평분사유닛에서 이격되게 배치되는 스카핑 장치.The method according to claim 6,
Wherein the sensing device is spaced apart from the horizontal injection unit by a predetermined distance L in a direction opposite to the conveying direction of the slab.
상기 감지장치는 레이저를 조사하는 발광부와 상기 발광부에서 조사되는 레이저를 수광하는 수광부를 포함하는 스카핑 장치.8. The method of claim 7,
Wherein the sensing device includes a light emitting portion for emitting a laser beam and a light receiving portion for receiving a laser beam emitted from the light emitting portion.
상기 발광부는,
발광본체지지대;
상기 발광본체지지대에 상하로 이동가능하게 배치되는 발광본체; 및
상기 발광본체에 상하로 상호 이격되게 배치되는 복수 개의 발광 소자를 포함하는 스카핑 장치.9. The method of claim 8,
The light-
A light emitting body support;
A light emitting body arranged to be movable up and down on the light emitting body support base; And
And a plurality of light emitting elements arranged vertically and spaced apart from each other in the light emitting body.
상기 수광부는,
수광본체지지대;
상기 수광본체지지대에 상하로 이동가능하게 배치되는 수광본체; 및
상기 수광본체에 상하로 상호 이격되게 배치되는 복수 개의 수광 소자를 포함하며,
상기 수광 소자는 상기 발광 소자에서 조사되는 레이저를 수광하여 상기 슬라브의 벤딩 높이(H)를 감지하는 스카핑 장치.10. The method of claim 9,
The light-
Receiving body support;
A light receiving body arranged to be movable up and down on the light receiving body support; And
And a plurality of light receiving elements arranged vertically spaced apart from each other in the light receiving body,
Wherein the light receiving element receives a laser beam emitted from the light emitting element and detects a bending height (H) of the slab.
상기 노즐은 상기 연결배관에 착탈 가능하게 배치되는 스카핑 장치.The method according to claim 6,
And the nozzle is detachably disposed on the connection pipe.
상기 T형 엘보의 일측에 배치되어 상기 T형 엘보에 상기 고압수를 공급하는 공급배관을 더 포함하는 스카핑 장치. 5. The method of claim 4,
And a supply pipe arranged at one side of the T-elbow for supplying the high-pressure water to the T-elbow.
상기 공급배관은 플랙서블(Fledxible)한 재질로 형성되는 스카핑 장치.13. The method of claim 12,
Wherein the supply piping is formed of a fl ipable material.
상기 제어부는 상기 감지장치의 신호에 따라 상기 스카핑 유닛을 이동시킨 후 구동되게 하는 스카핑 장치.3. The method of claim 2,
Wherein the control unit moves the scarping unit according to a signal of the sensing unit, and then drives the scarping unit.
스카핑 유닛으로 슬라브를 이송하는 단계;
감지장치를 이용하여 상기 슬라브의 벤딩 높이를 감지하는 단계;
스카핑 유닛을 이용하여 이송되는 상기 슬라브의 표면을 처리하는 단계;
수평분사유닛을 이용하여 상기 슬라브를 향해 고압수를 분사하는 단계; 및
서보 모터를 이용하여 상기 고압수의 분사 위치를 가변시키는 단계를 포함하며,
상기 감지장치의 신호에 따라, 상기 서보 모터는 상기 수평분사유닛을 회동시켜 고압수의 분사위치를 가변시키는 스카핑 장치 제어방법.A method for controlling a scarping device using a scarping device,
Transferring the slab to the scarifying unit;
Sensing a bending height of the slab using a sensing device;
Treating the surface of the slab being conveyed using a scarifying unit;
Spraying high-pressure water toward the slab using a horizontal injection unit; And
And varying an injection position of the high-pressure water using a servo motor,
Wherein the servomotor rotates the horizontal injection unit to vary the injection position of the high-pressure water according to a signal of the sensing device.
상기 스카핑 유닛으로 슬라브를 이송하는 단계에서는 상기 스카핑 장치의 핀치롤의 회전 속도를 조절하여 상기 슬라브가 기 설정된 속도로 상기 스카핑 유닛을 향해 이동되게 하는 스카핑 장치 제어방법.16. The method of claim 15,
Wherein the step of transferring the slab to the scarfing unit adjusts the rotational speed of the pinch roll of the scarfing unit so that the slab is moved toward the scarfing unit at a predetermined speed.
상기 슬라브의 이동 속도를 기반으로 상기 서보 모터의 회전 속도가 제어되는 스카핑 장치 제어방법.17. The method of claim 16,
Wherein the rotating speed of the servomotor is controlled based on the moving speed of the slab.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160168563A KR101905761B1 (en) | 2016-12-12 | 2016-12-12 | Scarfing Apparatus and Control Method using the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160168563A KR101905761B1 (en) | 2016-12-12 | 2016-12-12 | Scarfing Apparatus and Control Method using the same |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20180067138A true KR20180067138A (en) | 2018-06-20 |
| KR101905761B1 KR101905761B1 (en) | 2018-10-10 |
Family
ID=62770087
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160168563A KR101905761B1 (en) | 2016-12-12 | 2016-12-12 | Scarfing Apparatus and Control Method using the same |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101905761B1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200017056A (en) * | 2018-08-08 | 2020-02-18 | 주식회사 포스코 | Measuring apparatus for level and method therof |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240092903A (en) | 2022-12-15 | 2024-06-24 | 주식회사 이노와이어리스 | method for deciding position of train based on LTE-R network |
| KR20240097225A (en) | 2022-12-20 | 2024-06-27 | 주식회사 이노와이어리스 | method for correcting train position using signal strength of LTE-R base station |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101038864B1 (en) * | 2003-11-28 | 2011-06-03 | 주식회사 포스코 | Slab scarfing apparatus |
| KR20130073663A (en) * | 2011-12-23 | 2013-07-03 | 주식회사 포스코 | Apparatus for controlling horizontal injection unit in scarfing machine |
-
2016
- 2016-12-12 KR KR1020160168563A patent/KR101905761B1/en active IP Right Grant
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101038864B1 (en) * | 2003-11-28 | 2011-06-03 | 주식회사 포스코 | Slab scarfing apparatus |
| KR20130073663A (en) * | 2011-12-23 | 2013-07-03 | 주식회사 포스코 | Apparatus for controlling horizontal injection unit in scarfing machine |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200017056A (en) * | 2018-08-08 | 2020-02-18 | 주식회사 포스코 | Measuring apparatus for level and method therof |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101905761B1 (en) | 2018-10-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101905764B1 (en) | Scarfing Apparatus and Control Method using the same | |
| KR101905761B1 (en) | Scarfing Apparatus and Control Method using the same | |
| RU2701586C1 (en) | Device and method of scale removal from workpiece | |
| CN104227213B (en) | Automatic spot welding equipment | |
| CN111001969B (en) | Welding robot | |
| US4349182A (en) | Tape-controlled metal cutting apparatus | |
| KR101309641B1 (en) | Device and method for welding pipe | |
| CN102430842A (en) | Welding pipe vertical seam welding real-time tracking device | |
| JP2008238248A (en) | One-side welding equipment and method | |
| CN107284051A (en) | Shower nozzle mobile device and automatic positioning method | |
| KR101600948B1 (en) | Device for scarfing slab, and control method thereof | |
| KR102241657B1 (en) | The pipe welding wire cutting apparatus | |
| KR102451401B1 (en) | Hardfacing welding apparatus for extruder screw | |
| CN205817123U (en) | Automatic pipe welder control system | |
| KR101755385B1 (en) | Device for scarfing slab, and control method thereof | |
| CN207026790U (en) | A kind of welding equipment suitable for a variety of welding procedures | |
| GB1581959A (en) | Method and apparatus for aligning an ultrasonic testing apparatus on a weld seam | |
| KR20160037322A (en) | Welding servo carriage | |
| KR20110010492A (en) | Slab scarfing apparatus and thereof method | |
| KR101536907B1 (en) | Nozzle test apparatus | |
| JPH074679B2 (en) | Steel plate welding machine | |
| JPH0885063A (en) | Water jet grinding method and device thereof | |
| KR20120032854A (en) | Apparatus for preventing upward movement of front part of strip | |
| KR101225796B1 (en) | Apparatus for preventing upward movement of material | |
| KR20190075384A (en) | Scarfing Apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |