KR20170129160A - 쇼벨 - Google Patents
쇼벨 Download PDFInfo
- Publication number
- KR20170129160A KR20170129160A KR1020177027082A KR20177027082A KR20170129160A KR 20170129160 A KR20170129160 A KR 20170129160A KR 1020177027082 A KR1020177027082 A KR 1020177027082A KR 20177027082 A KR20177027082 A KR 20177027082A KR 20170129160 A KR20170129160 A KR 20170129160A
- Authority
- KR
- South Korea
- Prior art keywords
- engine
- operator
- operating
- engine speed
- operation lever
- Prior art date
Links
Images






Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
- F02D29/04—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto peculiar to engines driving pumps
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2062—Control of propulsion units
- E02F9/2066—Control of propulsion units of the type combustion engines
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
- E02F3/32—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom working downwardly and towards the machine, e.g. with backhoes
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/435—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2004—Control mechanisms, e.g. control levers
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2246—Control of prime movers, e.g. depending on the hydraulic load of work tools
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D11/00—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated
- F02D11/02—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by hand, foot, or like operator controlled initiation means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
- F02D29/02—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto peculiar to engines driving vehicles; peculiar to engines driving variable pitch propellers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D31/00—Use of speed-sensing governors to control combustion engines, not otherwise provided for
- F02D31/001—Electric control of rotation speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/021—Introducing corrections for particular conditions exterior to the engine
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/04—Introducing corrections for particular operating conditions
- F02D41/08—Introducing corrections for particular operating conditions for idling
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/14—Introducing closed-loop corrections
- F02D41/16—Introducing closed-loop corrections for idling
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D45/00—Electrical control not provided for in groups F02D41/00 - F02D43/00
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2232—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps
- E02F9/2235—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps including an electronic controller
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/02—Input parameters for engine control the parameters being related to the engine
- F02D2200/10—Parameters related to the engine output, e.g. engine torque or engine speed
- F02D2200/101—Engine speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/60—Input parameters for engine control said parameters being related to the driver demands or status
- F02D2200/602—Pedal position
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/60—Input parameters for engine control said parameters being related to the driver demands or status
- F02D2200/604—Engine control mode selected by driver, e.g. to manually start particle filter regeneration or to select driving style
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Operation Control Of Excavators (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
쇼벨은 구동원으로서 마련된 엔진과, 엔진의 구동력에 의하여 구동되는 작동부와, 작동부를 조작하기 위하여 마련된 조작부재와, 조작자의 가동부분의 위치 및 조작부재의 위치를 검출하는 검출장치를 갖는다. 조작판정부에서는, 검출장치의 검출결과로부터, 조작자의 가동부분과 조작부재의 위치관계를 판정한다. 제어부에서는, 조작판정부에 의하여 판정된 조작자의 가동부분과 조작부재의 위치관계에 근거하여, 엔진회전수를 설정한다.
Description
본 발명은 엔진의 목표설정회전수를 변경 가능한 쇼벨에 관한 것이다.
건설기계의 무조작 상태가 계속되었을 때에, 엔진의 회전수를 자동적으로 아이들링 회전수로 낮추는(아이들링 운전으로 전환하는) 오토아이들링 기능을 갖는 쇼벨이 알려져 있다(특허문헌 1 참조).
오토아이들링 기능에 있어서, 아이들링 운전으로의 전환은, 무조작 상태가 소정 시간 계속되었는지 여부의 판단에 근거하여 행해진다. 쇼벨이 조작 상태인지 여부는, 기계적 스위치나 센서를 이용하여 판단할 수 있다. 예를 들면, 조작레버의 위치를 센서로 검출하여, 조작레버가 조작된 위치(누인 위치)에 있는 경우를 조작 상태라고 판단할 수 있다. 혹은, 조작레버의 조작에 따라 생성되는 파일럿압을 검출하여, 조작 상태를 판단해도 된다.
오토아이들링 기능에서는, 엔진이 아이들링 운전하고 있는 상태에 있어서 조작레버가 조작되었다고 판단된 후, 엔진회전수를 통상의 운전 시의 회전수로 높이는 제어가 행해진다. 엔진의 회전수는 순간적으로 상승하는 것이 아니라, 아이들링 시의 회전수로부터 운전 시에 필요한 회전수에 도달하기까지는, 어느 정도의 시간이 필요하다. 이로 인하여, 쇼벨의 조작자가 조작레버를 조작한 시점에서 즉시 엔진회전수가 운전 시의 회전수가 되지 않아, 운전 시의 회전수로 상승할 때까지는, 쇼벨을 통상의 스피드나 파워로 조작할 수 없을 우려가 있다.
본 발명의 일 실시양태의 하나의 목적은, 조작부재에 대한 조작의 유무를 조작이 행해지기 전에 판단하여, 엔진회전수를 신속히 제어할 수 있는 쇼벨을 제공하는 것이다.
본 실시양태에 의하면, 엔진회전수를, 운전 시 회전수 및 상기 운전 시 회전수보다 낮은 아이들링 운전 시 회전수를 포함하는 복수의 회전수로 설정 가능한 쇼벨로서, 상기 쇼벨의 구동원으로서 마련된 엔진과, 상기 엔진의 구동력에 의하여 구동되는 작동부와, 상기 작동부를 조작하기 위하여 마련된 조작부재와, 조작자의 가동부분의 위치 및 상기 조작부재의 위치를 검출하는 검출장치와, 상기 검출장치의 검출결과로부터, 상기 조작자의 가동부분과 상기 조작부재의 위치관계를 판정하는 조작판정부와, 상기 조작판정부에 의하여 판정된 상기 조작자의 가동부분과 상기 한 쌍의 조작부재의 위치관계에 근거하여, 상기 엔진의 엔진회전수를 변경하는 제어부를 갖는 쇼벨이 제공된다.
본 실시양태에 의하면, 조작부재에 대한 조작의 유무를 조작부재를 촬영한 화상에 근거하여 사전에 판단하여, 엔진회전수를 신속히 제어할 수 있다.
도 1은 일 실시형태에 의한 쇼벨의 측면도이다.
도 2는 도 1의 쇼벨에 탑재된 구동계의 구성을 나타내는 도이다.
도 3은 도 1의 쇼벨에 탑재된 엔진제어계의 구성을 나타내는 도이다.
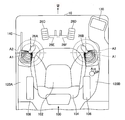
도 4는 캐빈 내에 마련된 운전석 및 콘솔의 측면도이다.
도 5는 캐빈 내에 마련된 운전석 및 콘솔의 평면도이다.
도 6은 엔진회전수를 제어하는 제어처리의 플로차트이다.
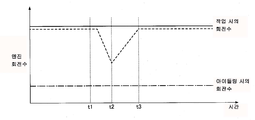
도 7은 조작레버가 중립위치로 되돌려진 후 단시간 후에 다시 조작된 경우의, 엔진회전수의 변화를 나타내는 타임차트이다.
도 8은 조작레버가 조작된 후, 조작이 종료될 때까지의, 엔진회전수의 변화를 나타내는 타임차트이다.
도 2는 도 1의 쇼벨에 탑재된 구동계의 구성을 나타내는 도이다.
도 3은 도 1의 쇼벨에 탑재된 엔진제어계의 구성을 나타내는 도이다.
도 4는 캐빈 내에 마련된 운전석 및 콘솔의 측면도이다.
도 5는 캐빈 내에 마련된 운전석 및 콘솔의 평면도이다.
도 6은 엔진회전수를 제어하는 제어처리의 플로차트이다.
도 7은 조작레버가 중립위치로 되돌려진 후 단시간 후에 다시 조작된 경우의, 엔진회전수의 변화를 나타내는 타임차트이다.
도 8은 조작레버가 조작된 후, 조작이 종료될 때까지의, 엔진회전수의 변화를 나타내는 타임차트이다.
첨부한 도면을 참조하면서, 본 발명의 실시형태에 대하여 설명한다.
도 1은 일 실시형태에 의한 쇼벨의 측면도이다. 쇼벨의 하부 주행체(1)에는, 선회기구(2)를 통하여 상부 선회체(3)가 탑재된다. 상부 선회체(3)에는 붐(4)이 장착된다. 붐(4)의 선단에는 암(5)이 장착된다. 암(5)의 선단에는 엔드어태치먼트로서의 버킷(6)이 장착된다.
붐(4), 암(5), 및 버킷(6)은, 어태치먼트의 일례인 굴삭어태치먼트를 구성한다. 붐(4), 암(5), 및 버킷(6)은, 붐실린더(7), 암실린더(8), 및 버킷실린더(9)에 의하여 각각 유압 구동된다.
상부 선회체(3)에는, 운전실로서 캐빈(10)이 탑재된다. 상부 선회체(3)에 있어서 캐빈(10)의 후방에, 쇼벨의 동력원으로서 엔진(11)이 탑재된다. 엔진(11)은, 예를 들면 디젤엔진과 같은 내연기관이다.
캐빈(10) 내에는, 운전석(100) 및 조작레버가 마련된 콘솔(120)이 설치된다. 또한, 캐빈(10) 내에는, 컨트롤러(30) 및 카메라(C1)가 설치된다.
컨트롤러(30)는, 쇼벨의 구동제어를 행하는 제어장치이다. 본 실시형태에서는, 컨트롤러(30)는, CPU 및 메모리(30c)를 포함하는 연산처리장치로 구성된다. 그리고, 컨트롤러(30)의 각종 기능은, CPU가 메모리(30c)에 저장된 프로그램을 실행함으로써 실현된다. 후술하는 엔진회전수 제어는, 컨트롤러(30)에 의하여 행해진다.
카메라(C1)는, 콘솔(120)의 상방에 설치되며, 조작레버의 근방을 촬영하여 화상정보를 컨트롤러(30)에 공급한다. 컨트롤러(30)는, 카메라(C1)로부터의 화상정보에 있어서 조작레버와 조작자의 손을 인식하고, 인식결과로부터 조작레버의 조작을 추정 또는 판단한다.
도 2는 도 1의 쇼벨의 구동계의 구성을 나타내는 블록도이다. 도 2에 있어서, 기계적 동력계는 이중선, 고압유압라인은 굵은 실선, 파일럿라인은 굵은 파선(破線), 전기구동·제어계는 점선으로 각각 나타내고 있다.
쇼벨의 구동계는, 엔진(11), 레귤레이터(13), 메인펌프(14), 파일럿펌프(15), 컨트롤밸브(17), 조작장치(26), 압력센서(29a, 29b), 및 컨트롤러(30)를 갖고 있다.
엔진(11)은, 엔진컨트롤유닛(74)(이하, ECU라고 함)에 의하여 구동제어된다. 엔진(11)은 쇼벨의 구동원이다. 엔진(11)의 출력축은, 메인펌프(14) 및 파일럿펌프(15)의 입력축에 접속되어 있다. 메인펌프(14) 및 파일럿펌프(15)는 엔진(11)의 동력에 의하여 구동되어, 유압을 발생한다.
메인펌프(14)는, 고압유압라인(16)을 통하여 고압의 작동유를 컨트롤밸브(17)에 공급한다. 이 메인펌프(14)로서는, 사판식 가변용량형 유압펌프를 이용할 수 있다.
레귤레이터(13)는, 메인펌프(14)의 토출량을 제어하기 위한 장치이다. 레귤레이터(13)는, 메인펌프(14)의 토출압, 또는 컨트롤러(30)로부터의 제어신호 등에 따라 메인펌프(14)의 사판경전각(斜板傾轉角)을 조절한다. 즉, 메인펌프(14)로부터의 작동유의 토출량은, 레귤레이터(13)에 의하여 제어된다.
파일럿펌프(15)는, 파일럿라인(25)을 통하여 각종 유압제어기기에 작동유를 공급한다. 파일럿펌프(15)로서, 예를 들면 고정용량형 유압펌프를 이용할 수 있다.
컨트롤밸브(17)는, 쇼벨에 있어서의 유압시스템을 제어하는 유압제어장치이다. 컨트롤밸브(17)는, 붐실린더(7), 암실린더(8), 버킷실린더(9), 좌측 주행용 유압모터(1A), 우측 주행용 유압모터(1B), 선회용 유압모터(2A)에 대하여, 메인펌프(14)로부터 토출되는 작동유를 선택적으로 공급한다.
조작장치(26)는, 각종 실린더(7~9), 주행용 유압모터(1A, 1B), 및 선회용 유압모터(2A)를 포함하는 각종 유압액추에이터를 조작하기 위하여 이용된다. 본 실시형태에서는, 조작장치(26)는, 붐(4)의 상승과 하강, 암(5)의 개폐, 버킷(6)의 개폐, 상부 선회체(3)의 선회를 조작하기 위한 좌우 한 쌍의 레버(26A, 26B)(조작부재)와, 하부 주행체(1)의 주행을 조작하는 한 쌍의 페달(26C, 26D)(조작부재)을 포함한다. 조작장치(26)는, 유압라인(27)을 통하여 컨트롤밸브(17)에 접속되어 있다.
또, 조작장치(26)는, 유압라인(28)을 통하여 압력센서(29a, 29b)에 접속되어 있다. 압력센서(29a, 29b)는, 조작장치(26)의 조작내용을 압력의 형태로 검출하는 센서이며, 검출값을 컨트롤러(30)에 대하여 출력한다. 다만, 조작장치(26)의 조작내용의 검출은, 각종 조작레버의 기울기를 검출하는 기울기센서 등 압력센서 이외의 다른 센서를 이용하여 행하는 것으로 해도 된다.
컨트롤러(30)는, 쇼벨을 제어하기 위한 제어장치이다. 본 실시형태에서는, 컨트롤러(30)는 CPU, RAM, ROM 등을 구비한 컴퓨터로 구성된다. 또, 컨트롤러(30)는, 각종 기능요소에 대응하는 프로그램을 ROM으로부터 독출하여 RAM으로 로드하고, 각종 기능요소에 대응하는 처리를 CPU에 실행시킨다.
또, 컨트롤러(30)는, 압력센서(29a, 29b)의 출력에 근거하여 조작장치(26)의 각각의 조작내용(예를 들면, 레버조작의 유무, 레버조작방향, 레버조작량 등)을 검출한다. 또한, 컨트롤러(30)는, 카메라(C1)로부터 공급되는 화상정보 등에 근거하여, 엔진(11)의 회전수 제어처리를 행한다. 이 회전수 제어처리를 달성하기 위하여, 컨트롤러(30)는, 도 2에 나타내는 바와 같이 기능부로서 조작판정부(30a)와 회전수제어부(30b)를 갖고 있다. 조작판정부(30a)와 회전수제어부(30b)가 행하는 처리에 대해서는 후술한다. 여기에서, 조작판정부(30a)는 반드시 컨트롤러(30)에 의하여 실현되지 않아도 되고, 컨트롤러(30)와는 다른 컨트롤러에 의하여 실현되어도 된다.
도 3은 도 1에 나타내는 쇼벨의 전기제어계의 구성을 나타내는 도이다.
상술과 같이 엔진(11)은, ECU(74)에 의하여 제어된다. ECU(74)로부터는, 엔진(11)의 상태를 나타내는 각종 데이터가 컨트롤러(30)에 상시 송신된다. 컨트롤러(30)는, 일시기억부(메모리)(30c)에 이 데이터를 축적한다.
엔진(11)에 마련된 수온센서(11c)로부터는, 냉각수온의 데이터가 컨트롤러(30)에 공급된다. 메인펌프(14)의 레귤레이터(13)에는, 사판각도의 지령값이 컨트롤러(30)로부터 공급된다. 토출압력센서(14b)로부터는, 메인펌프(14)의 토출압력을 나타내는 데이터가 컨트롤러(30)에 공급된다.
또, 메인펌프(14)가 흡입하는 작동유가 저장된 탱크와 메인펌프(14)의 사이의 관로(14-1)에는, 유온센서(14c)가 마련되어 있다. 이 유온센서(14c)로부터는, 관로(14-1)를 흐르는 작동유의 온도데이터가 컨트롤러(30)에 공급된다.
조작장치(26)는 압력센서(29a, 29b)를 갖고 있고, 조작레버(26A, 26B)를 조작했을 때에 컨트롤밸브(17)에 보내지는 파일럿압은 압력센서(29a, 29b)로 검출된다. 이 압력센서(29a, 29b)로 검출된 파일럿압을 나타내는 데이터도 컨트롤러(30)에 공급된다.
또, 본 실시형태에 관한 쇼벨은 캐빈(10) 내에 엔진회전수 조정다이얼(75)을 갖고 있다. 엔진회전수 조정다이얼(75)은, 엔진의 회전수를 조정하기 위한 다이얼이다.
구체적으로는, 엔진회전수 조정다이얼(75)은 SP모드, H모드, A모드, 및 아이들링모드를 포함하는 4단계 이상의 다단계로 엔진회전수의 전환이 가능하도록 구성되어 있다. 이 엔진회전수 조정다이얼(75)로부터는, 엔진회전수의 설정 상태를 나타내는 데이터가 컨트롤러(30)에 상시 공급된다.
다만, SP모드는, 작업량을 우선시하고자 하는 경우에 선택되는 회전수모드이며, 가장 높은 엔진회전수(운전 시 회전수)를 이용한다. H모드는, 작업량과 연비를 양립시키고자 하는 경우에 선택되는 회전수모드이며, 두번째로 높은 엔진회전수(운전 시 회전수)를 이용한다. A모드는, 연비를 우선시시키면서 저소음으로 쇼벨을 가동시키고자 하는 경우에 선택되는 회전수모드이며, 세번째로 높은 엔진회전수(운전 시 회전수)를 이용한다. 아이들링모드는, 엔진을 아이들링 상태로 하고자 하는 경우에 선택되는 회전수모드이며, 가장 낮은 엔진회전수(아이들링 운전 시 회전수)를 이용한다. 그리고, 엔진(11)은, 엔진회전수 조정다이얼(75)로 설정된 회전수모드의 엔진회전수로 일정하게 회전수가 제어된다. 또, 후술하는 바와 같이, 소정의 조건이 충족되면, 설정된 엔진회전수의 지령값이 출력되어, 엔진회전수는 변경된다.
다음으로, 도 4 및 도 5를 참조하면서, 캐빈(10) 내에 설치된 운전석(100) 및 조작장치(26)에 대하여 설명한다. 도 4는 캐빈(10)의 내부의 좌측 콘솔이 회동(回動)한 상태를 나타내는 측면도이다. 도 5는 운전석(100)의 주위를 위에서 본 평면도이다.
캐빈(10) 내에는 운전석(100)이 설치된다. 운전석(100)은 조작자가 착석하는 시트(102)와 등받이(104)를 포함한다. 운전석은 리클라이닝 시트이며, 등받이(104)의 경사각도를 조절 가능하게 되어 있다. 운전석(100)의 좌우 양측에 암레스트(106)가 배치된다. 암레스트(106)는 회동 가능하게 지지되어 있다. 쇼벨의 조작자가 운전석(100)으로부터 멀어질 때는, 도 4에 나타내는 바와 같이 암레스트(106)는 후방으로 회동되어 방해가 되지 않도록 되어 있다.
운전석(100)의 좌우 양측에 콘솔(120A) 및 콘솔(120B)이 각각 배치된다. 운전석(100) 및 콘솔(120A, 120B)은, 캐빈(10)의 바닥면에 고정된 레일(150) 상을 이동 가능하게 지지되어 있다. 따라서, 조작레버(26E, 26F)나 캐빈(10)의 프론트글라스에 대하여, 조작자는 운전석(100) 및 콘솔(120A, 120B)을 선호하는 위치로 이동시켜 고정할 수 있다. 또, 운전석(100)만을 전후로 슬라이딩시킬 수 있어, 콘솔(120A, 120B)의 위치에 대한 운전석의 위치도 조절할 수 있다.
좌측의 콘솔(120A)의 전측에 조작레버(26A)가 마련된다. 마찬가지로, 우측의 콘솔(120B)의 전측에 조작레버(26B)가 마련된다. 운전석(100)에 착석한 조작자는, 왼손으로 조작레버(26A)를 파지하면서 조작레버(26A)를 조작하고, 또한 오른손으로 조작레버(26B)를 파지하면서 조작레버(26B)를 조작한다. 다만, 콘솔(120A, 120B)의 각각은 회동 가능하게 지지되어 있고, 조작자는 콘솔(120A, 120B)의 각도를 조정함으로써, 조작레버(26A, 26B)의 중립위치에 있어서의 각도를 조정할 수 있다.
운전석(100)의 전방의 바닥면에 조작페달(26C, 26D)이 배치된다. 운전석(100)에 착석한 조작자는, 왼발로 조작페달(26C)을 조작하여 좌측 주행용 유압모터(1A)를 구동한다. 또, 운전석(100)에 착석한 조작자는, 오른발로 조작페달(26D)을 조작하여 우측 주행용 유압모터(1B)를 구동한다.
조작페달(26C)의 근방으로부터 조작레버(26E)가 상방을 향하여 뻗어 있다. 운전석(100)에 착석한 조작자는, 왼손으로 조작레버(26E)를 파지하면서 조작함으로써, 조작페달(26C)에서의 조작과 마찬가지로, 좌측 주행용 유압모터(1A)를 구동할 수 있다. 또, 조작페달(26D)의 근방으로부터 조작레버(26F)가 상방을 향하여 뻗어 있다. 운전석(100)에 착석한 조작자는, 오른손으로 조작레버(26F)를 파지하면서 조작함으로써, 조작페달(26D)에서의 조작과 마찬가지로, 우측 주행용 유압모터(1B)를 구동할 수 있다.
다만, 캐빈(10) 내의 우전부(右前部)에는, 쇼벨의 작업 조건이나 동작 상태 등의 정보를 표시하는 모니터(130)가 배치된다. 운전석(100)에 착석한 운전자는 모니터(130)에 표시된 각종 정보를 확인하면서 쇼벨에 의한 작업을 행할 수 있다.
또, 운전석(100)의 좌측(즉, 캐빈의 승강용 도어가 있는 측)에는, 게이트로크레버(140)가 마련된다. 게이트로크레버(140)를 당겨 올림으로써, 엔진(11)의 기동이 허가되어, 쇼벨을 조작할 수 있다. 게이트로크레버(140)를 눌러 내리면, 엔진(11)을 포함하는 작동부는 기동할 수 없게 된다. 따라서, 조작자가 운전석에 착석하여 게이트로크레버(140)를 당겨 올린 상태로 하지 않는 한, 쇼벨은 작동할 수 없어, 안전성이 유지된다.
여기에서, 본 실시형태에서는, 캐빈(10) 내의 운전석의 상방에, 카메라(C1)가 장착되어 있다. 카메라(C1)는, 조작레버(26A, 26B, 26E, 26F) 및 조작페달(26C, 26D)을 상방으로부터 촬영할 수 있는 위치에 배치되어 있다.
카메라(C1)는, 동영상을 촬영하는 비디오 카메라와 같은 촬상장치여도 되고, 혹은 일정한 단시간 간격으로 정지화면을 연속적으로 촬영하는 촬상장치여도 된다. 카메라(C1)가 촬영하여 얻어진 화상은, 컨트롤러(30)에 보내지고, 이하에 설명하는 엔진회전수 제어처리에 이용된다.
본 실시형태에 의한 엔진회전수 제어처리는, 쇼벨의 조작자의 손 또는 발(조작자의 가동부분)이 조작레버 또는 조작페달(조작부재)을 조작하는 상태인지 여부의 판정에 근거하여, 엔진(11)의 회전수를 제어하는 처리이다.
도 6은 엔진회전수 제어처리의 플로차트이다. 엔진회전수 제어처리는, 컨트롤러(30)가 프로그램을 실행함으로써 행해지는 처리이다. 컨트롤러(30)의 기능부인 조작판정부(30a)(도 2 참조)는, 카메라(C1)로부터의 화상정보에 근거하여, 쇼벨의 조작자의 손 또는 발(조작자의 가동부분)이 조작레버 또는 조작페달(조작부재)을 조작하는 상태인지 여부의 판정을 행한다. 그리고, 컨트롤러(30)의 기능부인 회전수제어부(30b)(도 2 참조)는, 조작판정부(30a)의 판정결과에 근거하여, 엔진(11)의 회전수를 소정의 회전수로 설정하도록 ECU(74)에 지시를 보낸다.
도 6에 나타내는 엔진회전수 제어처리가 개시되면, 컨트롤러(30)의 조작판정부(30a)는, 카메라(C1)로부터 화상정보를 취득한다(스텝 S1).
그리고, 조작판정부(30a)는, 취득한 화상정보에 있어서 예를 들면 조작레버(26A)와 조작자의 손을 인식하여, 조작레버(26A)가 포함되는 소정의 영역에 조작자의 손이 들어가 있는지 여부를 판정한다(스텝 S2). 보다 구체적으로는, 조작판정부(30a)는, 취득한 화상정보에 있어서 예를 들면 조작레버(26A)의 중심으로부터 소정의 반경으로 규정되는 영역(예를 들면 도 5에 있어서의 점선원(A1)의 내측의 영역)에 조작자의 손의 일부가 들어가 있는지 여부를 판정한다. 혹은, 조작판정부(30a)는, 조작레버(26A)의 외형과 조작자의 손의 외형을 화상정보로부터 인식하여, 조작자의 손의 외형이 조작레버(26A)의 외형에 접촉하고 있는지 여부를 판정해도 된다.
스텝 S2에 있어서, 조작판정부(30a)가, 조작레버(26A)가 포함되는 소정의 영역 내에 조작자의 손이 들어가 있다고 판정하면(스텝 S2의 YES), 처리는 스텝 S3으로 진행된다. 스텝 S3에서는, 컨트롤러(30)의 회전수제어부(30b)는, 조작판정부(30a)의 판정에 근거하여, 엔진(11)의 회전수를 통상의 운전 시의 설정회전수로 설정한다. 예를 들면, 엔진(11)의 회전수가 통상의 운전 시의 설정회전수로 설정되어 있던 경우는, 회전수제어부(30b)는, 그 설정회전수를 유지하도록 ECU(74)에 지시를 보낸다. 여기에서, 스텝 S2의 판정은, 좌우 각각의 조작레버의 소정 영역 내에 좌우의 손이 각각 들어가 있을 때만, 스텝 S3으로 진행하도록 해도 된다.
즉, 조작레버(26A)가 포함되는 소정의 영역 내에 조작자의 손이 들어가 있는 경우는, 컨트롤러(30)는, 조작자가 조작레버(26A)를 조작하고 있거나, 혹은 조작하려고 하고 있다고 판단하여, 엔진(11)의 회전수를 통상의 운전 시의 회전수로 유지시킨다. 이로써, 예를 들면 조작자가 조작레버(26A)를 중립위치로 유지한 상태로, 주위나 작업 상태를 확인하고 있을 때여도, 오토아이들링모드로 설정되지 않고, 엔진은 작업 시의 회전수로 유지된다. 따라서, 조작자가 바로 조작레버(26A)를 조작했다고 해도, 엔진회전수를 아이들링 운전 시의 회전수로부터 작업 시의 운전회전수까지 복귀시킬 필요가 없어, 신속히 작업을 재개할 수 있다.
도 7은 이상의 엔진회전수 제어처리가 행해졌을 때의, 엔진회전수의 변화를 나타내는 타임차트이다. 도 7에 있어서, 상술한 엔진회전수 제어처리가 행해지고 있는 경우에, 조작자가 조작레버(26A)의 조작을 단시간만 일시적으로 휴지(休止)했을 때의 엔진회전수의 추이가 실선으로 나타나 있다. 또, 도 7에 있어서, 상술한 엔진회전수 제어처리가 행해지지 않은 통상의 오토아이들링이 행해지고 있는 경우에, 조작자가 조작레버(26A)의 조작을 단시간만 일시적으로 휴지했을 때의 엔진회전수의 추이가 점선으로 나타나 있다.
도 7에 있어서, 시각 t1까지는, 조작레버(26A)가 조작되어 쇼벨의 작업이 행해지고 있던 것으로 한다. 그리고, 시각 t1에 있어서 조작자가 조작레버(26)를 중립위치로 유지하여 조작을 휴지하고, 그대로 조작레버(26A)로부터 손을 떼지 않고, 시각 t2에 있어서 조작을 재개한 것으로 한다.
본 실시형태에 의한 엔진회전수 제어처리가 행해지지 않은 경우는, 통상의 오토아이들링 기능이 작용하고, 시각 t1을 지난 후 엔진(11)의 회전수는 아이들링 회전수로 설정된다. 따라서, 도 7의 점선으로 나타내는 바와 같이 엔진회전수는 급격하게 감소한다. 그리고, 시각 t2에서 조작자가 다시 조작레버(26A)의 조작을 개시하면, 아이들링 운전모드는 해제되고, 엔진회전수는 상승으로 전환되어, 시각 t3에 있어서 작업 시의 설정회전수에 도달한다. 이 경우, 시각 t2부터 시각 t3까지의 사이는, 엔진(11)의 출력이 통상의 작업 시보다 작기 때문에, 조작레버(26A)의 조작량에 알맞은 조작이 행해지지 않는 경우가 있다. 즉, 엔진(11)의 회전수가 회복될 때까지는, 통상의 작업을 행하지 못하여, 조작자가 위화감을 느끼거나 불만감을 느낄 우려가 있다.
한편, 본 실시형태에 의한 엔진회전수 제어처리를 행한 경우는, 도 7의 실선으로 나타내는 바와 같이, 엔진(11)의 회전수는 시각 t1 이후에도 작업 시의 회전수로 유지된다. 즉, 조작자는 시각 t1 이후에도 조작레버(26A)로부터 손을 떼지 않기 때문에, 스텝 S2부터 S3의 처리에 의하여, 엔진(11)의 회전수는 작업 시의 회전수로 유지된다. 이로 인하여, 시각 t2에 있어서 다시 조작레버(26A)의 조작을 개시했을 때에는, 엔진(11)은 통상의 작업 시의 회전수에 있어서의 동력을 즉시 출력할 수 있어, 조작자는 불편을 느끼지 않는다.
도 6의 엔진회전수 제어처리로 되돌아가, 스텝 S2에 있어서, 조작판정부(30a)가, 조작레버(26A)가 포함되는 소정의 영역 내에 조작자의 손이 들어가 있지 않다고 판정하면(스텝 S2의 NO), 처리는 스텝 S4로 진행된다. 스텝 S4에서는, 컨트롤러(30)의 회전수제어부(30b)는, 조작판정부(30a)의 판정에 근거하여, 엔진(11)의 회전수를 아이들링운전 시의 회전수로 설정한다. 예를 들면, 엔진(11)의 회전수가 통상의 운전 시의 설정회전수로 설정되어 있던 경우는, 회전수제어부(30b)는, 엔진(11)의 회전수를 아이들링 회전수로 낮추도록 ECU(74)에 지시를 보낸다.
즉, 조작레버(26A)가 포함되는 소정의 영역 내에 조작자의 손이 들어가 있지 않은 경우는, 컨트롤러(30)는, 조작자가 조작레버(26A)를 조작하고 있지 않거나, 혹은 조작할 의사가 없다고 판단하여, 엔진(11)의 회전수를 아이들링 회전수로 설정한다. 이것은 이른바 오토아이들링 기능에 상당한다. 이로써, 예를 들면 조작자가 조작레버(26A)를 조작하여 작업을 행하지 않는 경우에는, 엔진(11)의 회전수를 자동적으로 아이들링 회전수로 낮출 수 있어, 엔진(11)의 연료소비량을 저감시킬 수 있다.
스텝 S4의 처리 후, 조작판정부(30a)는, 다시 카메라(C1)로부터 화상정보를 취득한다(스텝 S5). 이때에 취득하는 화상정보는, 조작자의 손의 움직임을 확인하기 위한 화상정보이며, 소정의 짧은 간격으로 촬영한 복수의 화상정보인 것이 바람직하다.
그리고, 조작판정부(30a)는, 취득한 화상정보에 근거하여, 조작자의 손이 조작레버(26A)(혹은, 조작레버(26A)를 포함하는 소정의 영역)에 가까워져 있는지 여부를 판정한다(스텝 S6). 보다 구체적으로는, 조작판정부(30a)는, 시간 간격을 두고 얻어진 복수의 화상 중, 취득시각이 빠른 쪽의 화상에 있어서의 손의 위치와, 취득시간이 늦은 쪽의 화상에 있어서의 손의 위치를 인식한다. 그리고, 예를 들면 취득시각이 빠른 쪽의 화상에 있어서의 손이 조작레버를 중심으로 하는 제1 영역(예를 들면 도 5에 있어서의 점선원(A2)의 내측의 영역)에 포함되어 있고, 취득시간이 늦은 쪽의 화상에 있어서의 손이, 제1 영역보다 작은 제2 영역(예를 들면 도 5에 있어서의 점선원(A1)의 내측의 영역)에 포함되어 있던 경우, 조작자의 손이 조작레버(26A)에 가까워져 있다(조작레버를 향하여 이동하고 있다)고 판단한다. 혹은, 조작판정부(30a)는, 취득시간이 늦은 쪽의 화상에 있어서의 손과 조작레버(26A)의 사이의 거리보다 짧은 경우에, 조작자의 손이 조작레버(26A)에 가까워져 있다(조작레버를 향하여 이동하고 있다)고 판단한다. 여기에서, A1은 예를 들면 반경 약 50mm이며, A2는 예를 들면 반경 약 100mm 정도로 형성된다. 또, 제1 영역(A2)은 생략해도 된다.
스텝 S6에 있어서, 조작판정부(30a)가, 조작자의 손이 조작레버(26A)(혹은, 조작레버(26A)를 포함하는 소정의 영역)에 가까워져 있다고 판정하면(스텝 S6의 YES), 처리는 스텝 S3으로 진행된다. 스텝 S3에서는, 컨트롤러(30)의 회전수제어부(30b)는, 조작판정부(30a)의 판정에 근거하여, 엔진(11)의 회전수를 통상의 운전 시의 설정회전수로 설정한다. 이 경우, 엔진(11)의 회전수는 아이들링 회전수로 설정되어 있기 때문에, 회전수제어부(30b)는, 엔진(11)의 회전수를 작업 시의 회전수까지 높이도록 ECU(74)에 지시를 보낸다.
한편, 스텝 S6에 있어서, 조작판정부(30a)가, 조작자의 손이 조작레버(26A)(혹은, 조작레버(26A)를 포함하는 소정의 영역)에 가까워져 있지 않다고 판정하면(스텝 S6의 NO), 처리는 스텝 S5로 되돌아가, 스텝 S5 및 S6의 처리를 반복한다.
도 8은 이상의 엔진회전수 제어처리가 행해졌을 때의, 엔진회전수의 변화를 나타내는 타임차트이다. 도 8에 있어서, 상술한 엔진회전수 제어처리가 행해지고 있는 경우에, 조작자가 조작레버(26A)의 조작을 개시한 후부터 종료할 때까지의 사이의 엔진회전수의 추이가 실선으로 나타나 있다. 또, 도 8에 있어서, 상술한 엔진회전수 제어처리가 행해지지 않은 통상의 오토아이들링이 행해지고 있는 경우에, 조작자가 조작레버(26A)의 조작을 개시한 후부터 종료할 때까지의 사이의 엔진회전수의 추이가 점선으로 나타나 있다.
도 8에 있어서, 시각 t1까지는, 조작레버(26A)가 조작되지 않고, 엔진(11)의 회전수는 아이들링 회전수였던 것으로 한다. 그리고, 시각 t1에 있어서 조작자가 조작레버(26A)에 손을 가까이하고, 시각 t2에 있어서 조작레버(26A)를 파지하며, 시각 t3에 있어서 조작레버(26A)의 조작을 개시한 것으로 한다.
본 실시형태에 의한 엔진회전수 제어처리가 행해지지 않은 경우는, 통상의 오토아이들링 기능이 작용하고, 시각 t3 이후에 조작레버(26A)의 조작이 검출된 시각 t4 후에, 엔진(11)의 회전수를 작업 시의 회전수로 복귀시키는 처리가 개시된다. 따라서, 도 8의 점선으로 나타내는 바와 같이, 엔진회전수는 시각 t4를 지난 후 상승하기 시작하여, 시각 t5에 있어서 드디어 작업 시의 회전수에 도달한다. 따라서, 작업자는 시각 t5까지는 통상의 동력으로 작업을 행할 수 없다.
한편, 상술한 본 실시형태에 의한 엔진회전수 제어처리가 행해지는 경우, 작업자가 손을 조작레버(26A)에 가까이 한 시각 t1의 시점에 있어서 스텝 S5→S6→S3의 처리가 행해지고, 엔진(11)의 회전수가 작업 시의 회전수로 설정된다. 따라서, 엔진(11)의 회전수는, 도 8의 실선으로 나타내는 바와 같이, 아직 작업자가 조작레버(26A)의 조작을 개시하지 않은 시각 t1부터 상승하기 시작하여, 시각 t5보다 훨씬 전인 시각 t4에 있어서 작업 시의 회전수로 복귀한다. 이와 같이, 본 실시형태에 의한 엔진회전수 제어처리에 의하면, 조작레버(26A)의 조작을 개시할 때에, 엔진(11)의 회전수를 신속히 상승시켜 통상의 작업을 즉시 행할 수 있다.
또, 작업을 중지할 때에는, 시각 t6에서 작업자는 조작레버(26A)를 중립위치로 되돌리자마자 조작레버(26A)로부터 손을 떼는 것으로 한다. 본 실시형태에 의한 엔진회전수 제어처리가 행해지지 않은 경우에는, 조작레버(26A)가 시각 t6에 있어서 중립위치가 된 후, 그 상태가 소정의 시간 후인 시각 t7까지 계속되었을 때에, 엔진회전수를 아이들링 회전수로 낮추는 제어가 행해진다. 따라서, 엔진회전수는, 도 8의 점선으로 나타내는 바와 같이, 시각 t6에서 소정 시간 경과한 시각 t7부터 하강하기 시작하여 아이들링 회전수가 된다.
한편, 본 실시형태에 의한 엔진회전수 제어처리가 행해지는 경우에는, 시각 t6에 있어서 바로 아이들링 회전수로의 설정이 행해지고, 도 8의 실선으로 나타내는 바와 같이, 엔진회전수는, 작업자가 조작레버(26A)로부터 손을 뗀 시각 t6부터 감소하여 아이들링 회전수가 된다. 즉, 조작레버(26A)가 중립위치가 된 후 소정의 시간이 지나도 중립위치 그대로라는 판단을 기다릴 필요가 없어, 신속히 아이들링 운전으로 이행할 수 있다.
조작레버(26A)의 조작에 관한 엔진회전수 제어처리에 대해서만 설명했지만, 다른 조작부재(조작레버 및 조작페달)에 대한 조작에 관해서도, 동일한 엔진회전수 제어처리를 적용할 수 있다.
예를 들면, 상술한 엔진회전수 제어처리를 조작레버(26B)의 조작에 대하여 적용해도 된다. 또, 조작레버(26A)에 대한 엔진회전수 제어처리와 조작레버(26B)에 대한 엔진회전수 제어처리를 동시에 행하는 것으로 해도 된다.
또, 상술한 엔진회전수 제어처리를, 조작페달(26C, 26D) 중 어느 한쪽 또는 양쪽 모두의 조작에 적용해도 된다. 이 경우, 조작자의 발을 화상 인식하고 페달(26C, 26D)과의 위치관계에 근거하여 조작의 유무를 판단하게 된다.
또한, 상술한 엔진회전수 제어처리를, 조작레버(27E, 27F) 중 어느 한쪽 또는 양쪽 모두의 조작에 적용해도 된다.
복수의 조작부재에 상술한 엔진회전수 제어처리를 적용하는 경우는, 복수의 처리결과가 경합되지 않도록 한다. 예를 들면, 어느 하나의 조작부재에 관한 처리에 있어서 조작되고 있다는 판단이 이루어진 경우에, 다른 조작부재에 관한 판단은 무시하고, 그 조작되고 있다는 판단을 우선시하여 작업 시의 회전수를 유지하는 것으로 해도 된다.
이상, 본 발명의 실시형태에 대하여 설명했지만, 본 발명은 상술한 실시형태에 한정되지 않고, 본 발명의 범위를 벗어나지 않게, 다양한 변형·변경이 가능하다.
본 국제 출원은, 2015년 3월 20일에 출원한 일본 특허출원 2015-058709호에 근거하여 우선권을 주장하는 것이며, 2015-058709호의 전체 내용을 본 국제 출원에 원용한다.
1 하부 주행체
1A, 1B 주행용 유압모터
2 선회기구
3 상부 선회체
4 붐
5 암
6 버킷
7 붐실린더
8 암실린더
9 버킷실린더
10 캐빈
11 엔진
13 레귤레이터
14 메인펌프
15 파일럿펌프
16 고압유압라인
17 컨트롤밸브
25 파일럿라인
26 조작장치
26A, 26B, 26E, 26F 조작레버
26C, 26D 조작페달
27, 28 유압라인
29a, 29b 압력센서
30 컨트롤러
30a 조작판정부
30b 회전수제어부
30c 일시기억부
74 ECU
75 엔진회전수 조정다이얼
100 운전석
120, 120A, 120B 콘솔
C1 카메라
1A, 1B 주행용 유압모터
2 선회기구
3 상부 선회체
4 붐
5 암
6 버킷
7 붐실린더
8 암실린더
9 버킷실린더
10 캐빈
11 엔진
13 레귤레이터
14 메인펌프
15 파일럿펌프
16 고압유압라인
17 컨트롤밸브
25 파일럿라인
26 조작장치
26A, 26B, 26E, 26F 조작레버
26C, 26D 조작페달
27, 28 유압라인
29a, 29b 압력센서
30 컨트롤러
30a 조작판정부
30b 회전수제어부
30c 일시기억부
74 ECU
75 엔진회전수 조정다이얼
100 운전석
120, 120A, 120B 콘솔
C1 카메라
Claims (7)
- 엔진회전수를, 운전 시 회전수 및 상기 운전 시 회전수보다 낮은 아이들링 운전 시 회전수를 포함하는 복수의 회전수로 설정 가능한 쇼벨로서,
상기 쇼벨의 구동원으로서 마련된 엔진과,
상기 엔진의 구동력에 의하여 구동되는 작동부와,
상기 작동부를 조작하기 위하여 마련된 조작부재와,
조작자의 가동부분의 위치 및 상기 조작부재의 위치를 검출하는 검출장치와,
상기 검출장치의 검출결과로부터, 상기 조작자의 가동부분과 상기 조작부재의 위치관계를 판정하는 조작판정부와,
상기 조작판정부에 의하여 판정된 상기 조작자의 가동부분과 상기 조작부재의 위치관계에 근거하여, 상기 엔진의 엔진회전수를 설정하는 제어부를 갖는 쇼벨. - 제 1 항에 있어서,
상기 조작판정부가 조작자의 가동부분이 상기 조작부재에 접촉된 위치에 있다고 판단하면, 상기 제어부는 엔진회전수를 상기 운전 시 회전수로 계속해서 설정하는 쇼벨. - 제 1 항에 있어서,
엔진회전수가 상기 아이들링 운전 시 회전수로 설정된 상태에 있어서, 조작판정부가 조작자의 가동부분이 상기 조작부재를 향하여 이동하고 있다고 판정하면, 상기 제어부는 상기 엔진의 엔진회전수를 상기 운전 시 회전수로 설정하는 쇼벨. - 제 1 항에 있어서,
상기 조작판정부가 조작자의 가동부분이 상기 조작부재에 접촉하고 있지 않다고 판정하면, 상기 제어부는 상기 엔진의 엔진회전수를 상기 아이들링 운전 시 회전수로 설정하는 쇼벨. - 제 1 항에 있어서,
상기 조작부재는 조작자의 손에 의하여 조작되는 조작레버인 쇼벨. - 제 1 항에 있어서,
상기 조작부재는 조작자의 발에 의하여 조작되는 조작페달인 쇼벨. - 제 1 항에 있어서,
상기 검출장치는 상기 조작부재 및 그 주변을 촬상하는 촬상장치이며, 상기 조작판정부는 상기 촬상장치로부터의 화상으로부터 상기 조작부재에 대한 조작의 유무를 판정하는 쇼벨.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015058709 | 2015-03-20 | ||
| JPJP-P-2015-058709 | 2015-03-20 | ||
| PCT/JP2016/058437 WO2016152700A1 (ja) | 2015-03-20 | 2016-03-17 | ショベル |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170129160A true KR20170129160A (ko) | 2017-11-24 |
Family
ID=56977270
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177027082A KR20170129160A (ko) | 2015-03-20 | 2016-03-17 | 쇼벨 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11261581B2 (ko) |
| EP (1) | EP3273037B1 (ko) |
| JP (1) | JP6483238B2 (ko) |
| KR (1) | KR20170129160A (ko) |
| CN (1) | CN107407213A (ko) |
| WO (1) | WO2016152700A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200136415A (ko) * | 2018-03-30 | 2020-12-07 | 스미토모 겐키 가부시키가이샤 | 쇼벨 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10253477B2 (en) * | 2016-10-21 | 2019-04-09 | Komatsu Ltd. | Work vehicle |
| KR102550947B1 (ko) * | 2017-08-23 | 2023-07-03 | 스미토모 겐키 가부시키가이샤 | 쇼벨 |
| JP7307051B2 (ja) | 2018-03-31 | 2023-07-11 | 住友建機株式会社 | ショベル |
| JP7251148B2 (ja) * | 2019-01-09 | 2023-04-04 | コベルコ建機株式会社 | 建設機械の操作制御装置 |
| CN109778940B (zh) * | 2019-03-13 | 2021-09-10 | 徐州徐工矿业机械有限公司 | 一种改善大型挖掘机性能的暂态功率匹配装置及匹配方法 |
| CN113544340B (zh) * | 2019-03-19 | 2023-08-18 | 住友建机株式会社 | 挖土机 |
| JP7326428B2 (ja) * | 2019-03-29 | 2023-08-15 | 住友建機株式会社 | ショベル及びショベルの制御装置 |
| JP7188289B2 (ja) * | 2019-06-24 | 2022-12-13 | 株式会社豊田自動織機 | バッテリ式産業車両 |
Family Cites Families (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3805640A (en) * | 1972-09-08 | 1974-04-23 | Twin Disc Inc | Electronically controlled power transmission |
| JPS62142834A (ja) * | 1985-12-17 | 1987-06-26 | Komatsu Ltd | クレ−ンのエンジン制御装置 |
| US5002454A (en) * | 1988-09-08 | 1991-03-26 | Caterpillar Inc. | Intuitive joystick control for a work implement |
| US5160239A (en) * | 1988-09-08 | 1992-11-03 | Caterpillar Inc. | Coordinated control for a work implement |
| US5265995A (en) * | 1991-03-04 | 1993-11-30 | Beck John W | Tractor-loader backhoe |
| DE4222990B4 (de) * | 1991-07-12 | 2004-04-08 | Roman Koller | Verfahren und Vorrichtung zur Auswertung einer Berührung |
| US5232057A (en) * | 1991-08-01 | 1993-08-03 | Case Corporation | Single lever multiple function control mechanism |
| US5424623A (en) * | 1993-05-13 | 1995-06-13 | Caterpillar Inc. | Coordinated control for a work implement |
| JP2951155B2 (ja) * | 1993-06-29 | 1999-09-20 | 住友建機株式会社 | 建設機械のオートアイドル時間可変装置 |
| US5446980A (en) * | 1994-03-23 | 1995-09-05 | Caterpillar Inc. | Automatic excavation control system and method |
| US7489303B1 (en) * | 2001-02-22 | 2009-02-10 | Pryor Timothy R | Reconfigurable instrument panels |
| US9513744B2 (en) * | 1994-08-15 | 2016-12-06 | Apple Inc. | Control systems employing novel physical controls and touch screens |
| US8068942B2 (en) * | 1999-12-15 | 2011-11-29 | Automotive Technologies International, Inc. | Vehicular heads-up display system |
| US6501198B2 (en) * | 2000-02-17 | 2002-12-31 | Jlg Industries, Inc. | Control lever for heavy machinery with near-proximity sensing |
| JP2002364402A (ja) * | 2001-04-05 | 2002-12-18 | Kiyonobu Hirose | エンジン制御装置 |
| FR2875940B1 (fr) * | 2004-09-24 | 2006-12-22 | Dav Sa | Dispositif de commande a levier, notamment pour la commande d'organes d'un vehicule automobile |
| US8723795B2 (en) * | 2008-04-24 | 2014-05-13 | Oblong Industries, Inc. | Detecting, representing, and interpreting three-space input: gestural continuum subsuming freespace, proximal, and surface-contact modes |
| US20100182017A1 (en) * | 2009-01-21 | 2010-07-22 | Honeywell International Inc. | Drive by wire non-contact capacitive throttle control apparatus and method of forming the same |
| US8275524B2 (en) * | 2009-12-23 | 2012-09-25 | Caterpillar Inc. | System and method for limiting operator control of an implement |
| JP2011149236A (ja) * | 2010-01-23 | 2011-08-04 | Tadao Osuga | 作業機械のエンジン制御装置 |
| US8380402B2 (en) * | 2010-09-14 | 2013-02-19 | Bucyrus Intl. Inc. | Control systems and methods for heavy equipment |
| JP2013076381A (ja) * | 2011-09-30 | 2013-04-25 | Hitachi Sumitomo Heavy Industries Construction Crane Co Ltd | 作業機械 |
| EP2808453B1 (en) * | 2012-01-25 | 2017-06-28 | Hitachi Construction Machinery Tierra Co., Ltd. | Construction machine |
| US9340953B2 (en) * | 2012-06-22 | 2016-05-17 | Hitachi Construction Machinery Co., Ltd. | Construction machine |
| US9164596B1 (en) * | 2012-10-22 | 2015-10-20 | Google Inc. | Method and apparatus for gesture interaction with a photo-active painted surface |
| JP2014091942A (ja) * | 2012-11-01 | 2014-05-19 | Komatsu Ltd | 建設機械の操作装置 |
| KR20150095743A (ko) * | 2012-12-07 | 2015-08-21 | 볼보 트럭 코퍼레이션 | 차량 어레인지먼트, 차량 어레인지먼트를 제어하기 위한 방법 및 컴퓨터 프로그램 |
| US9004218B2 (en) * | 2013-06-23 | 2015-04-14 | Cnh Industrial America Llc | Joystick with improved control for work vehicles |
| US10222868B2 (en) * | 2014-06-02 | 2019-03-05 | Samsung Electronics Co., Ltd. | Wearable device and control method using gestures |
| US20160257198A1 (en) * | 2015-03-02 | 2016-09-08 | Ford Global Technologies, Inc. | In-vehicle component user interface |
| US9836056B2 (en) * | 2015-06-05 | 2017-12-05 | Bao Tran | Smart vehicle |
| US20160357262A1 (en) * | 2015-06-05 | 2016-12-08 | Arafat M.A. ANSARI | Smart vehicle |
| US10937407B2 (en) * | 2015-10-26 | 2021-03-02 | Staton Techiya, Llc | Biometric, physiological or environmental monitoring using a closed chamber |
| US10289381B2 (en) * | 2015-12-07 | 2019-05-14 | Motorola Mobility Llc | Methods and systems for controlling an electronic device in response to detected social cues |
| US9610476B1 (en) * | 2016-05-02 | 2017-04-04 | Bao Tran | Smart sport device |
| WO2017138702A1 (ko) * | 2016-02-12 | 2017-08-17 | 엘지전자 주식회사 | 차량용 사용자 인터페이스 장치 및 차량 |
| US10034066B2 (en) * | 2016-05-02 | 2018-07-24 | Bao Tran | Smart device |
| US10046229B2 (en) * | 2016-05-02 | 2018-08-14 | Bao Tran | Smart device |
| DE102017216837A1 (de) * | 2017-09-22 | 2019-03-28 | Audi Ag | Gestik- und Mimiksteuerung für ein Fahrzeug |
| JP7420723B2 (ja) * | 2018-08-10 | 2024-01-23 | 住友建機株式会社 | ショベル |
-
2016
- 2016-03-17 KR KR1020177027082A patent/KR20170129160A/ko not_active Application Discontinuation
- 2016-03-17 CN CN201680017062.0A patent/CN107407213A/zh active Pending
- 2016-03-17 JP JP2017508279A patent/JP6483238B2/ja active Active
- 2016-03-17 WO PCT/JP2016/058437 patent/WO2016152700A1/ja active Application Filing
- 2016-03-17 EP EP16768603.9A patent/EP3273037B1/en active Active
-
2017
- 2017-09-15 US US15/705,381 patent/US11261581B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200136415A (ko) * | 2018-03-30 | 2020-12-07 | 스미토모 겐키 가부시키가이샤 | 쇼벨 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2016152700A1 (ja) | 2016-09-29 |
| JP6483238B2 (ja) | 2019-03-13 |
| JPWO2016152700A1 (ja) | 2018-01-25 |
| CN107407213A (zh) | 2017-11-28 |
| EP3273037B1 (en) | 2020-04-08 |
| US11261581B2 (en) | 2022-03-01 |
| US20180002895A1 (en) | 2018-01-04 |
| EP3273037A4 (en) | 2018-04-18 |
| EP3273037A1 (en) | 2018-01-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170129160A (ko) | 쇼벨 | |
| CN111315935B (zh) | 挖土机 | |
| JP6965160B2 (ja) | ショベル | |
| KR101614673B1 (ko) | 작업 차량 | |
| EP3165683B1 (en) | Shovel and method for controlling shovel | |
| CN109563784B (zh) | 液压作业机械 | |
| JP6860329B2 (ja) | 作業機械 | |
| JP2010216353A (ja) | 作業機械の油圧駆動装置 | |
| KR101945436B1 (ko) | 건설 기계 | |
| CN107075838B (zh) | 工作机械 | |
| KR20180132076A (ko) | 쇼벨 | |
| EP3587673B1 (en) | Shovel, shovel control method, and mobile information terminal | |
| EP3779058A1 (en) | Construction machine | |
| KR20200136415A (ko) | 쇼벨 | |
| KR20140020943A (ko) | 작업 기계의 표시 장치 | |
| JP7284019B2 (ja) | ブルドーザを制御するためのシステム及び方法 | |
| CN106988364B (zh) | 施工机械 | |
| JP7467471B2 (ja) | ショベル | |
| JP2022040146A (ja) | ショベル | |
| JP2024089856A (ja) | ショベル | |
| CN114729519A (zh) | 用于防止作业机械的误操作的系统、控制方法以及挖掘机 | |
| JPH08158409A (ja) | 作業車のアクセル位置自動変更構造 | |
| KR20080054957A (ko) | 휠로더의 조향 개선장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |