KR20100058813A - 냉각 장치 및 그 제어 방법 - Google Patents
냉각 장치 및 그 제어 방법 Download PDFInfo
- Publication number
- KR20100058813A KR20100058813A KR1020080117363A KR20080117363A KR20100058813A KR 20100058813 A KR20100058813 A KR 20100058813A KR 1020080117363 A KR1020080117363 A KR 1020080117363A KR 20080117363 A KR20080117363 A KR 20080117363A KR 20100058813 A KR20100058813 A KR 20100058813A
- Authority
- KR
- South Korea
- Prior art keywords
- vibration wave
- frost
- amount
- waveform
- refrigerant pipe
- Prior art date
Links
Images








Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25D—REFRIGERATORS; COLD ROOMS; ICE-BOXES; COOLING OR FREEZING APPARATUS NOT OTHERWISE PROVIDED FOR
- F25D21/00—Defrosting; Preventing frosting; Removing condensed or defrost water
- F25D21/02—Detecting the presence of frost or condensate
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25D—REFRIGERATORS; COLD ROOMS; ICE-BOXES; COOLING OR FREEZING APPARATUS NOT OTHERWISE PROVIDED FOR
- F25D29/00—Arrangement or mounting of control or safety devices
- F25D29/005—Mounting of control devices
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B2700/00—Sensing or detecting of parameters; Sensors therefor
- F25B2700/11—Sensor to detect if defrost is necessary
- F25B2700/111—Sensor to detect if defrost is necessary using an emitter and receiver, e.g. sensing by emitting light or other radiation and receiving reflection by a sensor
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Thermal Sciences (AREA)
- General Engineering & Computer Science (AREA)
- Defrosting Systems (AREA)
Abstract
본 발명은 냉각 장치에 마련된 증발기의 냉매관 양 측에 진동파 발생부와 진동파 감지부를 설치하고, 이 진동파 발생부를 통해 증발기의 냉매관의 일측에서 발생된 파와, 진동파 감지부를 통해 냉매관의 타측에서 감지된 파를 비교하여 냉매관에 착상된 서리의 양을 판단하고, 판단 결과에 따라 제상 운전 여부를 결정한다.
본 발명은 냉각 장치에 마련된 증발기의 냉매관에 한 쌍의 진동파 발생부와 진동파 감지부를 복수 개 설치하고, 한 쌍의 진동파 발생부와 진동파 감지부가 설치된 해당 구간의 서리의 양을 판단하고 판단 결과에 따라 제상 운전 여부를 결정한다.
본 발명은 냉장고, 김치 냉장고, 공기 조화기 등의 증발기에 착상된 서리의 양 감지 정확도를 높일 수 있고, 이에 따라 적절한 시기에 제상 운전을 시작 및 종료할 수 있어 열교환 성능을 향상시키고 에너지 효율을 높일 수 있다.
Description
본 발명은 냉각 장치 및 그 제어 방법에 관한 것으로, 보다 상세하게는 열교환에 의해 증발기에 착상된 서리를 감지하기 위한 냉각 장치 및 그 제어 방법에 관한 것이다.
일반적으로, 냉각 장치는 냉동사이클에 따라 냉매를 순환시켜 정해진 공간을 냉각시키는 장치로, 이러한 냉각 장치는 냉장고, 김치냉장고, 공기조화기 등이 있다.
여기서 냉동사이클은 냉매를 압축, 응축, 팽창, 기화의 4단계로 변화시키는 것으로, 이를 위해서는 압축기, 응축기, 팽창밸브, 증발기 등이 구비되어 있어야 한다. 즉, 압축기의 운전을 통해 기체 상태인 냉매를 압축시켜 응축기로 보내면 압축된 냉매는 응축기에서 주위의 공기와 열교환되어 냉각되고, 이때 냉각에 의해 액체 상태로 된 냉매가 팽창밸브에서 유량이 조정되면서 증발기로 분사되면 급팽창되어 기화되고 이에 따라 증발기에서 주위로부터 열을 흡수하여 저장실 또는 실내 등의 내부 공간으로 냉기를 공급하여 그 공간을 냉각시킨다. 그리고 증발기에서 기체 상태로 된 냉매는 다시 압축기로 들어간 후 압축되어 액체 상태가 되면서 위와 같은 냉동사이클을 반복한다.
이때 냉동사이클을 통해 내부 공간을 냉각시키는 증발기 표면온도는 내부 공간 공기의 온도에 비하여 상대적으로 낮고, 이로 인하여 증발기 표면에는 상대적으로 고온인 내부 공간의 공기로부터 응축된 수분이 달라붙게 되어 서리가 착상된다. 이에 따라 증발기 표면에 착상된 서리는 시간이 지남에 따라 점점 두꺼워지고, 이로 인해 증발기를 통과하는 냉기의 열교환 효율이 떨어져 과다한 전력 소모가 발생한다.
이러한 문제를 해결하기 위해 종래에는 압축기의 운전시간을 누적하고 누적된 운전시간이 일정 시간을 경과하면 증발기 주변에 설치된 가열부를 동작시켜 증발기에 착상된 서리를 제거하는 제상운전을 수행하였다. 그러나 이러한 제상운전은 증발기에 착상된 실제 서리의 양과 무관하게 압축기의 운전시간에 기반하여 수행함으로써, 증발기에 착상된 서리를 효율적으로 제거하는데 한계가 있었다.
본 발명의 일 측면에 따르면 냉매관의 일측에 설치되고 진동파를 발생시키는 진동파 발생부; 냉매관의 타측에 설치되고 진동파를 감지하는 진동파 감지부; 진동파 발생부에서 발생된 진동파와 진동파 감지부에서 감지된 진동파의 파형 변화에 기초하여 냉매관에 착상된 서리의 양을 판단하는 제어부를 포함한다.
파형의 변화는, 진동파 발생부에서 발생된 진동파와 파 감지부에서 감지된 진동파의 위상 변화이다.
파형의 변화는, 진동파 발생부에서 발생된 진동파와 파 감지부에서 감지된 진동파의 진폭 변화이다.
제어부는, 서리의 양에 기초하여 제상 운전을 제어한다.
제어부는, 제상 운전 시 파형의 변화에 기초하여 냉매관에 남아 있는 서리의 양을 판단하고, 남은 서리의 양에 기초하여 제상 운전의 종료 여부를 판단한다.
본 발명의 다른 측면에 따르면 냉매관에 설치되고 진동파를 발생시키는 복수 개의 진동파 발생부; 복수 개의 진동파 발생부에 각각 대응하여 냉매관에 설치되고 진동파를 감지하는 복수 개의 진동파 감지부; 복수 개의 진동파 발생부에서 발생된 진동파와 각 진동파 발생부에 대응하는 진동파 감지부에서 감지된 진동파의 파형 변화에 기초하여 냉매관의 구간별 서리의 양을 판단하는 제어부를 포함한다.
복수 개의 진동파 발생부는 순차적으로 진동파를 발생시킨다.
냉매관은 복수 구간으로 구획되고, 복수 개의 진동파 발생부는 각 구간의 일 측에 설치되고, 복수 개의 진동파 감지부는 각 구간의 타측에 설치된다.
파형 변화는, 진동파 발생부에서 발생된 진동파와 진동파 감지부에서 감지된 진동파의 위상 변화이다.
파형 변화는, 진동파 발생부에서 발생된 진동파와 진동파 감지부에서 감지된 진동파의 진폭 변화이다.
제어부는, 구간별 서리의 양에 기초하여 제상 운전을 제어한다.
제어부는, 제상 운전 시 냉매관에 남아 있는 서리의 양을 판단하고, 남은 서리의 양에 기초하여 제상 운전의 종료 여부를 판단한다.
제어부는, 구간별 서리의 양 중 적어도 하나의 구간의 서리의 양이 기준 양 이상이면 제상 운전을 제어한다.
진동파 발생부는 미리 설정된 기준 파형에 대응하는 진동파를 발생시키고, 진동파 감지부는 감지된 진동파에 대응하는 감지 파형을 출력한다.
본 발명의 다른 측면에 따르면 냉매관의 일측에 장착된 진동파 발생부를 동작시켜 진동파를 발생시키고, 냉매관의 타측에 장착된 진동파 감지부에서 진동파를 감지하고, 발생된 진동파와 감지된 진동파의 파형 변화에 기초하여 냉매관에 착상된 서리의 양을 판단한다.
진동파를 발생시키는 것은, 미리 설정된 기준 파형에 대응하는 진동파를 발생시키는 것을 포함한다.
진동파를 감지하는 것은, 감지된 진동파에 대응하는 감지 파형을 출력하는 것을 더 포함한다.
파형의 변화에 기초하는 것은, 발생된 진동파의 감지된 진동파를 비교하여 위상차를 산출하는 것을 포함한다.
파형의 변화에 기초하는 것은, 발생된 진동파의 감지된 진동파를 비교하여 진폭차를 산출하는 것을 포함한다.
냉매관에 착상된 서리의 양에 기초하여 제상 시점을 판단하는 것을 더 포함한다.
제상 시점인 경우 제상 운전을 수행하고, 진동파를 발생시키고 진동파를 감지하여 냉매관에 남아 있는 서리의 양을 판단하고, 서리의 양에 기초하여 제상 운전의 종료 시점을 판단하는 것을 더 포함한다.
본 발명의 다른 측면에 따르면 복수 개의 진동파 발생부를 동작시켜 진동파를 발생시키고, 복수 개의 진동파 발생부에 각각 대응하는 진동파 감지부를 통해 진동파를 감지하고, 발생된 진동파와 감지된 진동파의 파형 변화에 기초하여 냉매관에 착상된 구간별 서리의 양을 판단한다.
진동파를 발생시키는 것은, 복수 개의 진동파 발생부를 순차적으로 동작시키는 것을 포함한다.
진동파를 감지하는 것은, 냉매관을 복수 구간으로 구획하고, 냉매관의 구간별 진동파를 감지하는 것을 포함한다.
파형의 변화에 기초하는 것은, 발생된 진동파와 감지된 진동파를 비교하여 위상차를 산출하는 것을 포함한다.
파형의 변화에 기초하는 것은, 발생된 진동파와 감지된 진동파를 비교하여 진폭차를 산출하는 것을 포함한다.
냉매관에 착상된 구간별 서리의 양에 기초하여 제상 시점인지 판단하는 것을 더 포함한다.
제상 시점인 경우 제상 운전을 수행하고, 진동파를 발생시키고 진동파를 감지하여 냉매관에 남아 있는 서리의 양을 판단하고, 남아 있는 서리의 양에 기초하여 제상 운전의 종료 시점을 판단하는 것을 더 포함한다.
구간별 서리의 양과 기준 양을 각각 비교하고, 적어도 하나의 구간의 서리의 양이 기준 양 이상이면 제상 운전을 수행하는 것을 더 포함한다.
진동파를 발생시키는 것은, 미리 설정된 기준 파형에 대응하는 진동파를 발생시키는 것이고, 진동파를 감지하는 것은, 감지된 진동파에 대응하는 감지 파형을 출력하는 것을 더 포함한다.
본 발명의 일 측면 따르면 증발기의 냉매관의 일측에서 발생된 진동파와 냉매관의 타측에서 감지된 진동파를 비교하여 냉매관에 착상된 서리의 양을 감지함으로써, 냉매관에 착상된 서리의 양의 감지 정확도를 높일 수 있다.
본 발명의 다른 측면 따르면 냉장고, 김치 냉장고, 공기 조화기 등과 같은 냉각 장치의 열교환 과정 중에 발생하는 서리의 착상으로 인해 열교환 성능 저하 및 과다한 전력 소모가 발생되는 것을 방지할 수 있다. 즉 증발기에 착상된 서리의 양을 정확하게 감지하여 적절한 제상 운전 시작 시점 및 제상 운전 완료 시점을 결정함으로써 제상운전을 최적화하여 열교환 성능을 향상시키고 에너지 효율을 높일 수 있다.
본 발명의 다른 측면 따르면 냉매관의 구간별 착상된 서리의 양을 용이하게 감지할 수 있어, 냉매관의 구간에 따라 착상된 서리 양이 다른 경우에도 제상 운전을 최적화시킬 수 있다.
이하에서는 첨부도면을 참조하여 본 발명에 대해 상세히 설명한다.
본 발명의 일 실시예 및 다른 실시예는 냉동 사이클을 이용한 냉각 장치 중 냉장고를 예를 들어 설명한다.
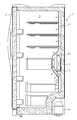
도 1에 도시된 바와 같이, 냉장고는 전면이 개방되어 형성된 본체(10)와, 본체(10)의 내측에 마련되어 식품을 보관하기 위한 저장실(20)을 가진다. 이 저장실은 중간 격벽을 사이에 두고 좌우로 구획되고 냉동실 및 냉장실로 구분되어 진다. 이러한 냉동실과 냉장실은 전면이 개구되어 있고, 냉동실과 냉장실의 전면 개구된 부분에는 냉동실과 냉장실을 외부와 차폐시키기 위한 도어(30)가 각각 마련된다. 그리고 본체(10)와 저장실(20)의 벽면 사이는 공기가 유동하는 덕트(40)가 형성되어 있고, 저장실(20)의 벽면에는 복수 개의 홀이 형성되어 있고 이 복수 개의 홀을 통해 저장실(20)과 덕트(40) 내의 공기가 서로 다른 공간으로 이동한다.
그리고 덕트(40) 내에는 응축기(미도시)로부터 제공받은 냉매를 증발시키면서 주위의 잠열을 흡수하는 냉각작용에 의하여 주변의 공기를 냉각시키는 증발기(50)와, 저장실(20)의 공기를 흡입하고 증발기(50)를 통과한 공기를 저장실(20)로 보내는 팬(60)과, 증발기(50)에 착상된 서리를 제거하는 가열부(70)가 설치되어 있다. 그리고 본체(10)의 하측에 마련된 기계실에는 냉매를 압축하여 응축기(미도시)로 보내는 압축기(80)와, 압축기(80)에서 압축된 고온고압 상태의 냉매를 방열을 통하여 응축하는 응축기(미도시)가 설치되어 있다.
그리고 증발기(50)는 냉매가 흐르는 냉매관(51)과, 냉매관(51)에 장착되어 열 교환 효율을 높이는 복수개의 냉매핀(미도시)을 가진다. 이러한 증발기(50)는 저온저압의 냉매를 저압상태에서 저온으로 증발시킴에 따라 이에 비해 상대적으로 고온인 고내의 공기가 열교환되어 고내를 저온화시키는 역할을 수행하며, 온도차에 의해 냉매관(51) 및 냉매핀에는 서리가 계속적으로 착상된다. 이에 증발기(50)에 착상된 서리를 제거하기 위해 제상 운전을 필수적으로 수행해야 한다. 이러한 제상 운전을 수행하기 위해서는 증발기에 착상된 서리의 양을 알아야 한다.
이에 따라 증발기(50)의 냉매관(51)에는 냉매관(51)에 착상된 서리의 양을 판단하기 위해 진동파 발생부(91)와 진동파 감지부(92)가 설치되어 있다. 이를 도 2를 참조하여 설명한다.
진동파 발생부(91)는 냉매관(51)의 일측에 설치되어 진동파를 발생시키고, 진동파 감지부(92)는 냉매관(51)의 타측에 설치되어 냉매관(51)의 진동파를 감지한다. 즉, 냉매관(51)의 일 측에서 타 측으로 냉매가 흐른다고 할 때 냉매관(51)의 일 측 단부에는 진동파 발생부(91) 또는 진동파 감지부(92) 중 어느 하나가 설치되고, 타 측 단부에는 일측 단부에 설치되지 않은 나머지 하나가 설치된다.
진동파 발생부(91)의 액츄에이터로는 진동파를 발생시킬 수 있는 압전소자(piezoelectric element) 또는 소형 모터가 사용된다. 그 외에도 진동파 발생 부(91)의 액츄에이터로는 진동을 발생시킬 수 있는 여러 종류의 액츄에이터를 다양하게 적용 가능하다.
진동파 감지부(92)의 센서로는 냉매관(51)을 따라 이동되는 진동파를 감지하고 감지된 진동파를 전압으로 변환시켜 이에 대응하는 파형으로 출력할 수 있는 압전소자 또는 가속도 센서가 사용된다. 그 외에도 진동파 감지부(92)의 센서로는 진동파를 전압으로 변환시킬 수 있는 여러 종류의 센서를 다양하게 적용 가능하다.
즉 진동파 발생부(91)는 제어부(100)의 지시에 따라 미리 설정된 일정 주파수 및 진폭을 가진 기준 파형에 대응하는 진동파를 냉매관(51)에 전달하고, 진동파 감지부(92)는 냉매관(51)을 따라 흐르는 진동파를 감지하여 감지된 진동파를 전압으로 변환시키고 이 전압의 파형을 제어부(100)로 출력한다.
여기서 제어부(100)는 진동파 감지부(92)에서 전송된 진동파의 파형에 따라 팬(60), 가열부(70), 압축기(80)의 냉각 및 제상 운전을 제어한다. 이러한 제어 구성을 도 3을 참조하여 설명하도록 한다.
도 3은 본 발명의 일 실시예에 의한 냉각 장치의 제어 구성도로서, 진동파 발생부(91), 진동파 감지부(92), 제어부(100), 저장부(110), 팬구동부(120), 가열 구동부(130) 및 압축기 구동부(140)를 포함한다.
진동파 발생부(91)는 제어부(100)의 지시에 따라 정해진 시간에 미리 설정된 일정 주파수 및 일정 진폭을 가진 기준 파형에 대응하는 진동파를 발생시켜 냉매관(51)으로 전달한다.
진동파 감지부(92)는 냉매관(51)을 따라 흐르는 진동파를 감지하고 감지된 진동파를 전압으로 변환시키고 이 전압의 파형(감지 파형)을 제어부(100)로 출력한다.
이때 증발기(50)에 착상된 서리는 냉매관(51)을 따라 이동하는 진동파의 이동에 저항 요소가 되어 그 형태가 변화하게 되는데, 즉 증발기(50)에 착상된 서리의 양에 따라 진동파에 대응하는 기준 파형의 변화 정도가 달라지게 된다. 이를 도 4 및 도 5를 참조하여 설명한다.
도 4는 증발기(50)에 착상된 서리의 양이 적은 경우 진동파의 기준 파형(a)과 감지 파형(b)이고, 도 5는 증발기(50)에 착상된 서리의 양이 많은 경우 진동파의 기준 파형(a)과 감지 파형(b)으로, 도 4와 도 5를 비교하면, 진동파의 기준 파형(a)와 감지 파형(b)의 위상차(T1)가 도 5의 동파의 기준 파형(a)와 감지 파형(b)의 위상차(T2)가 더 작고, 진폭차도 작다. 이와 같이 증발기(50)에 착상된 서리의 양이 많으면 증발기(50)에 착상된 서리의 양이 적을 때보다 진동파의 기준 파형과 감지 파형의 위상차가 더 크고, 또한 진동파의 기준 파형과 감지 파형의 진폭차가 더 크며 감지 파형의 형태가 많이 일그러지는 것을 알 수 있다.
즉, 증발기(50)에 착상된 서리의 양이 증가함에 따라 진동파 이동 시 저항력이 증가하게 되어, 진동파의 발생 시간으로부터 진동파가 감지되는 감지 시간의 차이가 커지게 되어 위상차가 커지게 되고, 또한 발생된 진동파의 기준 파형의 진폭과 감지된 진동파의 감지 파형의 진폭차가 커지며 일그러짐의 정도도 많아진다.
제어부(100)는 정해진 시간에 진동파 발생부(91)로 미리 설정된 일정 주파수 및 일정 진폭을 가진 기준 파형을 전달하고, 진동파 감지부(92)로부터 감지 파형이 입력되면 기준 파형과 감지 파형을 비교하여 증발기(50)에 착상된 서리의 양을 판단하고, 판단 결과에 따라 최적의 제상시점에서 제상운전이 수행되도록 한다.
이때 제어부(100)는 진동파 발생부(91)에서 발생된 진동파의 기준 파형의 위상과 진동파 감지부(92)에서 감지된 진동파의 감지 파형의 위상을 비교한 위상차와, 진동파의 기준 파형의 진폭과 감지 파형의 진폭을 비교한 진폭차 중 적어도 하나를 기초로 하여 증발기(50)의 냉매관(51)에 착상된 서리의 양을 측정한다.
이를 좀 더 구체적으로 설명하면, 파형의 위상차를 이용하여 서리의 양을 판단하는 경우, 제어부(100)는 진동파의 기준 파형의 위상과 진동파의 감지 파형의 위상을 비교하여 그 위상차를 산출하고, 산출된 위상차와 저장부(110)에 저장된 위상차 데이터를 비교하여 서리의 양을 판단한다.
파형의 진폭차를 이용하여 서리의 양을 판단하는 경우, 제어부(100)는 진동파의 기준 파형과 감지 파형의 진폭을 비교하여 그 진폭차를 산출하고, 산출된 진폭차와 저장부(110)에 저장된 진폭차 데이터를 비교하여 서리의 양을 판단한다.
파형의 위상차 및 진폭차를 이용하여 서리의 양을 판단하는 경우, 제어부(100)는 진동파의 기준 파형의 위상과 감지 파형의 위상을 비교하여 위상차를 산출하고, 진동파의 기준 파형과 감지된 진동파의 감지 파형의 진폭을 비교하여 그 진폭차를 산출하고, 산출된 위상차 및 진폭차를 매칭시켜 저장부(110)에 저장된 위상차 데이터 및 진폭차 매칭 데이터와 비교하여 서리의 양을 판단한다.
그리고 제어부(100)는 판단된 서리의 양과 기준 서리의 양을 비교하여 제상 시점인지 판단하고, 제상 시점으로 판단되면 제상 운전이 수행되도록 가열부(70)의 작동을 제어한다.
제어부(100)는 제상운전이 수행된 시간이 미리 설정된 기준 시간에 도달하였는지 판단하고, 제상 운전 시간이 기준 시간에 도달하였다고 판단되면 가열부(70)의 동작이 정지되도록 제어한다.
또는 제어부(100)는 제상 운전 시 서리량 측정부(90)의 작동을 제어하여 증발기(50)의 냉매관(51)에 남은 서리의 양을 판단하고, 판단 결과에 따라 제상 종료 시점을 판단하여 가열부(70)의 동작 정지 여부를 판단한다. 여기서 서리량 측정부(90)의 작동을 제어하여 냉매관(51)에 남은 서리의 양을 판단하는 것은, 서리량 측정부(90)의 작동을 제어하여 냉매관(51)에 착상된 서리의 양을 판단하는 것과 동일하다.
이와 같이 적절한 시점에 제상운전을 수행하고 적절한 시점에 제상 운전을 정지함으로써 제상운전에 소비되는 전력을 절약할 수 있다.
저장부(110)는 진동파의 기준 파형과 감지 파형의 위상차 데이터에 대응하는 서리의 양 데이터가 저장되어 있고, 진동파의 기준 파형과 감지 파형의 진폭차 데이터에 대응하는 서리의 양 데이터가 저장되어 있다. 또한 저장부(110)는 위상차 데이터 및 진폭차의 매칭 데이터에 대응하는 서리의 양 데이터가 저장되어 있다. 그리고 저장부(110)는 기준 서리의 양이 저장되어 있다.
팬구동부(120)는 냉장고의 운전모드에 따라 팬(60)을 미리 설정된 회전 속도로 회전시키고, 가열 구동부(130)는 증발기(50)에 착상된 서리의 양이 미리 설정된 기준 서리의 양에 도달한 경우 제어부(100)의 명령에 따라 가열부(70)를 동작시키 고 제어부(100)의 명령에 따라 가열부(70)의 동작을 정지시키며, 압축기 구동부(140)는 냉장고의 운전모드를 기초로 압축기(80)를 온오프시켜 저장실 내의 온도가 운전모드에 대응하는 설정 온도로 유지되도록 하고 제상 운전 시에는 제어부(100)의 명령에 따라 압축기(80)의 냉매 압축 동작을 정지시킨다. 이러한 냉각장치의 제어 순서를 도 6을 참조하여 설명하도록 한다.
도 6은 본 발명의 일 실시예에 따른 냉각장치의 제어 순서도로서, 도 2 및 도 3을 참조하여 설명하도록 한다.
사용자에 의해 조작된 운전 모드에 대응하는 냉동 사이클로 압축기(80)를 온오프 구동시키고, 팬(60)의 회전을 제어하여 저장실이 설정 온도로 유지되도록 한다. 그리고 주기적으로 서리량 측정부(90)의 동작을 제어하여 증발기(50)의 냉매관(51)에 착상된 서리의 양을 판단한다.
이를 구체적으로 설명하면 서리량 측정부(90)의 진동파 발생부(91)를 동작시켜 미리 설정된 일정 주파수 및 일정 진폭을 가진 기준 파형에 대응하는 진동파를 발생(301)시켜 냉매관(51)으로 전달한다. 그러면 냉매관(51)을 통해 진동파가 이동하고, 이 진동파는 서리량 측정부(90)의 진동파 감지부(92)에 의해 감지(302)된다. 진동파 감지부(92)는 감지된 진동파를 전압으로 변환시키고 이 전압의 파형을 출력한다.
이때 냉매관(51)을 따라 이동하는 진동파는 냉매관(51)을 따라 이동 시 냉매관(51)에 착상된 서리에 의해 진동파의 형태, 즉 기준 파형의 진폭이 줄고 일그러지는 등 그 형태가 변화한다. 즉 진동파의 기준 파형과 감지 파형은 그 형태를 달 리하게 된다. 또한 냉매관(51)에 착상된 서리의 양에 따라 진동파 발생부(91)에서 발생된 진동파가 진동파 감지부(92)에 의해 감지되기까지의 시간(즉, 위상)이 달라지게 된다.
이에 따라 진동파 발생부(91)에서 발생된 진동파의 기준파형과 진동파 감지부(92)에서 감지된 감지 파형을 비교(303)하여 증발기(50)의 냉매관(51)에 착상된 서리의 양을 판단(304)한다. 즉, 진동파의 기준 파형과 감지 파형의 위상차, 진동파의 기준 파형과 감지 파형의 진폭차 중 적어도 하나를 기초로 하여 증발기(50)의 냉매관(51)에 착상된 서리의 양을 판단한다.
이를 좀 더 구체적으로 설명하면, 첫 번째로 파형의 위상차를 이용하여 서리의 양을 판단하는 경우, 진동파의 기준 파형의 위상과 감지 파형의 위상을 비교하여 그 위상차를 산출하고, 산출된 위상차와 저장부(110)에 저장된 위상차 데이터를 비교하여 서리의 양을 판단한다.
두 번째로 파형의 진폭차를 이용하여 서리의 양을 판단하는 경우, 진동파의 기준 파형의 진폭과 감지 파형의 진폭을 비교하여 진폭차를 산출하고, 산출된 진폭차와 저장부(110)에 저장된 진폭차 데이터를 비교하여 서리의 양을 판단한다.
세 번째로 파형의 위상차 및 진폭차를 이용하여 서리의 양을 판단하는 경우, 진동파의 기준 파형의 위상과 감지 파형의 위상을 비교하여 위상차를 산출하고, 진동파의 기준 파형의 진폭과 감지 파형의 진폭을 비교하여 진폭차를 산출하며, 산출된 파형의 위상차와 진폭차를 매칭시켜 저장부(110)에 저장된 위상차 데이터 및 진폭차 데이터의 매칭 데이터와 비교하여 서리의 양을 판단한다.
위와 같은 방법에 의해 판단된 서리의 양과 기준 서리의 양을 비교하여 제상 운전 시점인지 판단(305)한다. 즉, 냉매관(51)에 착상된 서리의 양이 기준 서리의 양 이상이면 제상 운전 시점이라고 판단하고 가열부(70)를 작동시켜 제사 운전을 수행(306)한다.
그리고 제상운전이 수행된 시간을 카운트 하여 미리 설정된 기준 시간과 비교하고, 제상 운전 시간이 기준 시간에 도달하였는지 판단하고, 제상 운전 시간이 기준 시간에 도달하였다고 판단되면 가열부(70)의 동작이 정지되도록 제어한다.
또는 제상 운전 시 진동파 발생부(91)와 진동파 감지부(92)의 작동을 제어하여 증발기(50)의 냉매관(51)에 남은 서리의 양을 판단하고, 판단 결과에 따라 가열부(70)의 동작 정지 여부를 판단한다. 여기서 진동파 발생부(91)와 진동파 감지부(92)의 작동을 제어하여 냉매관(51)에 남은 서리의 양을 판단하는 방법은, 진동파 발생부(91)와 진동파 감지부(92)의 작동을 제어하여 냉매관(51)에 착상된 서리의 양을 판단하는 방법과 동일하다.
이와 같이 적절한 시점에 제상운전을 수행하고 적절한 시점에 제상 운전을 정지함으로써 제상운전에 소비되는 전력을 절약할 수 있다.
도 7은 본 발명의 다른 실시예에 따른 냉각 장치의 상세 구성도이고, 도 8은 본 발명의 다른 실시예에 따른 냉각 장치의 제어 구성도이다.
냉매는 냉매관(51)을 따라 흐르면서 압력 및 온도가 변하고 이에 따라 냉매관(51)의 각 구간마다 착상되는 서리의 양이 달라지게 된다. 이에 따라 냉매관(51)의 구간마다 착상된 서리의 양을 측정하기 위해 증발기(50)의 냉매관(51)을 복수 개의 구간으로 구획한 후 복수 개의 구간에 각각 설치된 서리량 측정부(90)를 통해 각 구간에 착상된 서리의 양을 측정한다.
즉, 진동파 발생부(93)와 진동파 감지부(94)는 쌍을 이뤄 냉매관(51)의 복수개의 구간에 각각 설치된다. 도 7에 도시된 바와 같이, 각 구간의 일 측 단부에는 진동파 발생부(93) 또는 진동파 감지부(94) 중 어느 하나가 설치되고, 타 측 단부에는 일측 단부에 설치되지 않은 나머지 하나가 설치된다.
복수 개의 진동파 발생부(93)는 제어부(200)의 지시에 따라 순차적으로 미리 설정된 일정 주파수 및 진폭을 가진 기준 파형에 대응하는 진동파를 냉매관(51)으로 전달하고, 복수 개의 진동파 감지부(94)는 자신이 위치한 해당 냉매관(51)의 구간에서 이동하는 진동파를 감지하고 감지된 진동파를 전압으로 변환시키고 이 전압의 파형(감지 파형)을 제어부(200)로 출력한다.
여기서 제어부(200)는 복수 개의 진동파 감지부(94)에서 전송된 복수 개의 진동파의 파형 변화에 따라 팬(60), 가열부(70), 압축기(80)의 냉각 및 제상 운전을 제어한다. 이러한 제어 구성을 도 8을 참조하여 설명하도록 한다.
도 8은 본 발명의 다른 실시예에 의한 냉각 장치의 제어 구성도로서, 복수 개의 진동파 발생부(93), 진동파 감지부(94), 제어부(200), 저장부(210), 팬구동부(220), 가열 구동부(230) 및 압축기 구동부(240)를 포함한다.
복수 개의 진동파 발생부(93-1 내지 93-n)는 제어부(200)의 지시에 따라 정해진 시간에 순차적으로 미리 설정된 일정 주파수 및 일정 진폭을 가진 기준 파형에 대응하는 진동파를 발생시켜 냉매관(51)으로 전달하고, 복수 개의 진동파 감지 부(94-1 내지 94-n)는 해당 냉매관(51)의 구간에 전달되는 진동파를 감지하고 감지된 진동파를 전압으로 변환시키고 이 전압의 파형(감지 파형)을 제어부(200)로 출력한다.
이때 복수 개의 진동파 발생부(93-1 내지 93-n)에서 발생되는 일정 주파수를 각각 다르게 설정하고, 복수 개의 진동파 감지부(94-1 내지 94-n)에서 감지되는 감지 주파수를 해당 구간에 설치된 진동파 발생부(93-1 내지 93-n)의 일정 주파수로 설정함으로써 복수 개의 진동파 발생부(93-1 내지 93-n)의 진동파 발생 시점을 동일하게 하는 것도 가능하다.
어느 한 구간에서 발생된 진동파가 냉매관(51)을 따라 이동할 때 냉매관(51)에 착상된 서리가 진동파의 이동 시 저항 요소가 되어 그 형태가 변화하게 되고, 또한 각 구간에 착상된 서리의 양에 따라 진동파의 이동 시간이 달라지게 된다.
제어부(200)는 서리량 측정부(90)의 진동파 발생부(93-1 내지 93-n)로 미리 설정된 일정 주파수 및 일정 진폭을 가진 기준 파형을 순차적으로 전달하고, 진동파 감지부(94-1 내지 94-n)로부터 각 구간의 감지 파형이 입력되면 각 구간의 진동파의 파형 변화에 기초하여 각 구간에 착상된 서리의 양을 판단한다. 이때 제어부(200)는 구간별 진동파의 기준 파형과 감지 파형의 위상차와, 진동파의 기준 파형과 감지 파형의 진폭차 중 적어도 하나를 기초로 하여 구간별 착상된 서리의 양을 측정한다.
이를 좀 더 구체적으로 설명하면, 첫 번째로 파형의 위상차를 이용하여 서리의 양을 판단하는 경우, 제어부(200)는 구간별 진동파의 기준 파형의 위상과 감지 파형의 위상을 비교하여 위상차를 산출하고, 산출된 위상차와 저장부(210)에 저장된 위상차 데이터를 비교하여 구간별 서리의 양을 판단한다.
두 번째로 파형의 진폭차를 이용하여 서리의 양을 판단하는 경우, 제어부(200)는 구간별 진동파의 기준 파형의 진폭과 감지 파형의 진폭을 비교하여 진폭차를 산출하고, 산출된 진폭차와 저장부(210)에 저장된 진폭차 데이터를 비교하여 구간별 서리의 양을 판단한다.
세 번째로 파형의 위상차 및 진폭차의 매칭시켜 서리의 양을 판단하는 경우, 제어부(200)는 구간별 진동파의 기준 파형의 위상과 감지 파형의 위상을 비교하여 그 위상차를 산출하고, 진동파의 기준 파형과 감지 파형의 진폭을 비교하여 진폭차를 산출하며, 산출된 위상차 및 진폭차의 매칭시켜 저장부(210)에 저장된 위상차 데이터 및 진폭차의 매칭 데이터와 비교하여 구간별 서리의 양을 판단한다.
그리고 제어부(200)는 구간별 서리의 양과 기준 서리의 양을 각각 비교하여 제상 시점인지 판단하고, 제상 시점으로 판단되면 제상 운전이 수행되도록 가열부(70)의 작동을 제어한다. 이때 제어부(200)는 적어도 하나의 구간에 착상된 서리의 양이 기준 서리의 양 이상인 경우 제상 시점으로 판단한다.
제어부(200)는 제상운전이 수행된 시간이 미리 설정된 기준 시간에 도달하였는지 판단하고, 제상 운전 시간이 기준 시간에 도달하였다고 판단되면 가열부(70)의 동작이 정지되도록 제어한다.
또는 제어부(200)는 제상 운전 시 진동파 발생부(93)와 진동파 감지부(94)의 작동을 제어하여 증발기(50)의 냉매관(51)의 구간별 남은 서리의 양을 판단하고, 판단 결과에 따라 제상 종료 시점인지 판단하여 가열부(70)의 동작 정지 여부를 판단한다. 여기서 진동파 발생부(93)와 진동파 감지부(94)의 작동을 제어하여 냉매관(51)의 구간별 남은 서리의 양을 판단하는 것은, 진동파 발생부(93)와 진동파 감지부(94)의 작동을 제어하여 냉매관(51)의 구간별 착상된 서리의 양을 판단하는 것과 동일하다.
이와 같이 적절한 시점에 제상운전을 수행하고 적절한 시점에 제상 운전을 정지함으로써 제상운전에 소비되는 전력을 절약할 수 있다.
저장부(210)는 진동파 발생부(93-1 내지 93-n)에서 발생된 진동파의 기준 파형의 위상과 진동파 감지부(94-1 내지 94-n)에서 감지된 진동파의 감지 파형의 위상을 비교한 위상차 데이터에 대응하는 서리의 양 데이터가 저장되어 있고, 진동파 발생부(93-1 내지 93-n)에 발생된 진동파의 기준 파형의 진폭과 진동파 감지부(94-1 내지 94-n)에서 감지된 진동파의 감지 파형의 진폭을 비교한 진폭차 데이터에 대응하는 서리의 양 데이터가 저장되어 있다. 또한 저장부(210)는 위상차 데이터 및 진폭차 데이터의 매칭에 대응하는 서리의 양 데이터가 저장되어 있다. 그리고 저장부(210)는 기준 서리의 양이 저장되어 있다.
팬구동부(220)는 냉장고의 운전모드에 따라 팬(60)을 미리 설정된 회전 속도로 회전시키고, 가열 구동부(230)는 증발기(50)에 착상된 서리의 양이 미리 설정된 기준 서리의 양에 도달한 경우 제어부(200)의 명령에 따라 가열부(70)를 동작시키고 제어부(200)의 명령에 따라 가열부(70)의 동작을 정지시키며, 압축기 구동부(240)는 냉장고의 운전모드를 기초로 압축기(80)를 온오프시켜 저장실 내의 온도 가 운전모드에 대응하는 설정 온도로 유지되도록 하고 제상 운전 시에는 제어부(200)의 명령에 따라 압축기(80)의 냉매 압축 동작을 정지시킨다. 이러한 냉각장치의 제어 순서를 도 9를 참조하여 설명하도록 한다.
도 9는 본 발명의 다른 실시예에 따른 냉각장치의 제어 순서도로서, 도 7 및 도 8을 참조하여 설명하도록 한다.
사용자에 의해 조작된 운전 모드에 대응하는 냉동 사이클로 압축기(80)를 온오프 구동시키고, 팬(60)의 회전을 제어하여 저장실이 설정 온도로 유지되도록 한다. 그리고 주기적으로 복수 개의 서리량 측정부(90)의 동작을 제어하여 증발기(50)의 냉매관(51)의 구간별 착상된 서리의 양을 판단한다.
이를 구체적으로 설명하면 복수 개의 진동파 발생부(93)를 순차적으로 동작시켜 미리 설정된 일정 주파수 및 일정 진폭을 가진 기준 파형에 대응하는 진동파를 발생(401)시켜 냉매관(51)으로 전달한다. 이때 냉매관(51)의 구간별로 진동파가 순차적으로 이동하고, 이 진동파는 해당 구간에 설치된 진동파 감지부(94)에 의해 감지(402)되며, 이때 복수 개의 진동파 감지부(94)는 감지된 진동파를 전압으로 변환시키고 이 전압의 파형(감지 파형)을 출력한다.
이때 냉매관(51)의 구간별 착상된 서리의 양에 따라 구간별 감지 파형은 파형의 진폭 및 일그러짐 등의 그 형태가 각각 다르게 나타난다. 또한 냉매관(51)의 구간별 착상된 서리의 양에 따라 진동파 발생부(93)에서 발생된 진동파의 기준 파형의 위상과 진동파 감지부(94)에서 감지된 진동파의 감지 파형의 위상차가 다르게 나타난다.
이러한 진동파의 기준 파형과 감지 파형을 비교(403)하고, 두 진동파의 파형 변화를 기초로 구간별 착상된 서리의 양을 판단한다. 즉, 구간별 진동파의 기준 파형의 위상과 감지 파형의 위상을 비교한 위상차와, 진동파의 기준 파형의 진폭과 감지 파형의 진폭을 비교한 진폭차 중 적어도 하나를 기초로 하여 증발기(50)의 냉매관(51)의 구간별 착상된 서리의 양을 판단(404)한다.
이를 좀 더 구체적으로 설명하면, 첫 번째로 파형의 위상차를 이용하여 서리의 양을 판단하는 경우, 구간별 진동파의 기준 파형의 위상과 감지 파형의 위상을 비교하여 위상차를 산출하고, 산출된 위상차와 저장부(210)에 저장된 위상차 데이터를 비교하여 서리의 양을 판단한다.
두 번째로 파형의 진폭차를 이용하여 서리의 양을 판단하는 경우, 구간별 진동파의 기준 파형과 감지 파형의 진폭을 비교하여 그 진폭차를 산출하고, 산출된 진폭차와 저장부(210)에 저장된 진폭차 데이터를 비교하여 서리의 양을 판단한다.
세 번째로 파형의 위상차 및 진폭차를 이용하여 서리의 양을 판단하는 경우, 구간별 진동파의 기준 파형의 위상과 감지 파형의 위상을 비교하여 위상차를 산출하고, 구간별 진동파의 기준 파형과 감지 파형의 진폭을 비교하여 그 진폭차를 산출하며, 구간별 산출된 위상차 및 진폭차를 매칭시켜 저장부(210)에 저장된 위상차 데이터 및 진폭차 데이터의 매칭 데이터와 비교하여 구간별 서리의 양을 판단한다.
이때 구간별 착상된 서리의 양과 기준 서리의 양을 각각 비교(405)하여 제상 운전 시점인지 판단(406)한다. 즉 적어도 하나의 구간에 착상된 서리의 양이 기준 서리의 양 이상이면 제상 운전 시점이라고 판단하고, 가열부(70)를 작동시켜 제상 운전을 수행(407)한다.
그리고 제상운전이 수행된 시간을 카운트 하여 미리 설정된 기준 시간과 비교하고, 제상 운전 시간이 기준 시간에 도달하였는지 판단하고, 제상 운전 시간이 기준 시간에 도달하였다고 판단되면 가열부(70)의 동작이 정지되도록 제어한다.
또는 제상 운전 시 적어도 하나의 진동파 발생부(93)와 진동파 감지부(94)의 작동을 제어하여 증발기(50)의 냉매관(51)에 남은 서리의 양을 판단하고, 판단 결과에 따라 가열부(70)의 동작 정지 여부를 판단한다. 여기서 적어도 하나의 진동파 발생부(93)와 진동파 감지부(94)는 기준 서리의 양보다 많은 양의 서리가 착상되었다고 판단된 구간에 설치된 서리량 측정부이다.
이와 같이 적절한 시점에 제상운전을 수행하고 적절한 시점에 제상 운전을 정지함으로써 제상운전에 소비되는 전력을 절약할 수 있다.
도 1은 본 발명의 실시예에 따른 냉각 장치의 예시도이다.
도 2는 본 발명의 일 실시예에 따른 냉각 장치의 상세 예시도이다.
도 3은 본 발명의 일 실시예에 따른 냉각 장치의 제어 구성도이다.
도 4 및 도 5는 본 발명의 일 실시예에 따른 냉각 장치의 파형도이다.
도 6은 본 발명의 일 실시예에 따른 냉각 장치의 제어 순서도이다.
도 7은 본 발명의 다른 실시예에 따른 냉각 장치의 상세 예시도이다.
도 8은 본 발명의 다른 실시예에 따른 냉각 장치의 제어 구성도이다.
도 9는 본 발명의 다른 실시예에 따른 냉각 장치의 제어 순서도이다.
*도면의 주요부분에 대한 부호 설명*
10: 본체 20: 저장실
30: 도어 40: 덕트
50: 증발기 60: 팬
70: 가열부 80: 압축기
90: 서리량 측정부 100: 제어부
110: 저장부
Claims (26)
- 냉매관의 일측에 설치되고 진동파를 발생시키는 진동파 발생부;상기 냉매관의 타측에 설치되고 상기 진동파를 감지하는 진동파 감지부;상기 진동파 발생부에서 발생된 진동파와 상기 진동파 감지부에서 감지된 진동파의 파형 변화에 기초하여 상기 냉매관에 착상된 서리의 양을 판단하는 제어부;를 포함하는 냉각 장치.
- 제 1 항에 있어서, 상기 파형의 변화는,상기 진동파 발생부에서 발생된 진동파와 상기 파 감지부에서 감지된 진동파의 위상 변화인 냉각 장치.
- 제 1 항에 있어서, 상기 파형의 변화는,상기 진동파 발생부에서 발생된 진동파와 상기 파 감지부에서 감지된 진동파의 진폭 변화인 냉각 장치.
- 제 1 항에 있어서, 상기 제어부는,상기 서리의 양에 기초하여 제상 운전을 제어하는 냉각 장치.
- 제 4 항에 있어서, 상기 제어부는상기 제상 운전 시 상기 파형의 변화에 기초하여 상기 냉매관에 남아 있는 서리의 양을 판단하고, 상기 남은 서리의 양에 기초하여 상기 제상 운전의 종료 여부를 판단하는 냉각 장치.
- 냉매관에 설치되고 진동파를 발생시키는 복수 개의 진동파 발생부;상기 복수 개의 진동파 발생부에 각각 대응하여 상기 냉매관에 설치되고 상기 진동파를 감지하는 복수 개의 진동파 감지부;상기 복수 개의 진동파 발생부에서 발생된 진동파와 각 진동파 발생부에 대응하는 진동파 감지부에서 감지된 진동파의 파형 변화에 기초하여 상기 냉매관의 구간별 서리의 양을 판단하는 제어부를 포함하는 냉각 장치.
- 제 6 항에 있어서,상기 복수 개의 진동파 발생부는 순차적으로 진동파를 발생시키는 냉각 장치.
- 제 6 항에 있어서,상기 냉매관은 복수 구간으로 구획되고,상기 복수 개의 진동파 발생부는 각 구간의 일측에 설치되고, 상기 복수 개의 진동파 감지부는 각 구간의 타측에 설치되는 냉각 장치.
- 제 6 항에 있어서, 상기 파형 변화는,상기 진동파 발생부에서 발생된 진동파와 상기 진동파 감지부에서 감지된 진동파의 위상 변화인 냉각 장치.
- 제 6 항에 있어서, 상기 파형 변화는,상기 진동파 발생부에서 발생된 진동파와 상기 진동파 감지부에서 감지된 진동파의 진폭 변화인 냉각 장치.
- 제 6 항에 있어서, 상기 제어부는,상기 구간별 서리의 양에 기초하여 제상 운전을 제어하는 냉각 장치.
- 제 11 항에 있어서, 상기 제어부는상기 제상 운전 시 상기 냉매관에 남아 있는 서리의 양을 판단하고, 상기 남은 서리의 양에 기초하여 상기 제상 운전의 종료 여부를 판단하는 냉각 장치.
- 제 6 항에 있어서, 상기 제어부는,상기 구간별 서리의 양 중 적어도 하나의 구간의 서리의 양이 기준 양 이상이면 상기 제상 운전을 제어하는 냉각 장치.
- 냉매관의 일측에 장착된 진동파 발생부를 동작시켜 진동파를 발생시키고,상기 냉매관의 타측에 장착된 진동파 감지부에서 상기 진동파를 감지하고,상기 발생된 진동파와 감지된 진동파의 파형 변화에 기초하여 상기 냉매관에 착상된 서리의 양을 판단하는 냉각 장치의 제어 방법.
- 제 14 항에 있어서, 상기 파형의 변화에 기초하는 것은,상기 발생된 진동파의 상기 감지된 진동파를 비교하여 위상차를 산출하는 것을 포함하는 냉각 장치의 제어 방법.
- 제 14 항에 있어서, 상기 파형의 변화에 기초하는 것은,상기 발생된 진동파의 상기 감지된 진동파를 비교하여 진폭차를 산출하는 것을 포함하는 냉각 장치의 제어 방법.
- 제 14 항에 있어서,상기 냉매관에 착상된 서리의 양에 기초하여 제상 시점을 판단하는 것을 더 포함하는 냉각 장치의 제어 방법.
- 제 17 항에 있어서,상기 제상 시점인 경우 제상 운전을 수행하고,상기 진동파를 발생시키고 상기 진동파를 감지하여 상기 냉매관에 남아 있는 서리의 양을 판단하고,상기 서리의 양에 기초하여 상기 제상 운전의 종료 시점을 판단하는 것을 더 포함하는 냉각 장치의 제어 방법.
- 복수 개의 진동파 발생부를 동작시켜 진동파를 발생시키고,상기 복수 개의 진동파 발생부에 각각 대응하는 진동파 감지부를 통해 상기 진동파를 감지하고,상기 발생된 진동파와 감지된 진동파의 파형 변화에 기초하여 상기 냉매관에 착상된 구간별 서리의 양을 판단하는 냉각 장치의 제어 방법.
- 제 19 항에 있어서, 상기 진동파를 발생시키는 것은,상기 복수 개의 진동파 발생부를 순차적으로 동작시키는 것을 포함하는 냉각 장치의 제어 방법.
- 제 19 항에 있어서, 상기 진동파를 감지하는 것은,상기 냉매관을 복수 구간으로 구획하고,상기 냉매관의 구간별 진동파를 감지하는 것을 포함하는 냉각 장치의 제어 방법.
- 제 19 항에 있어서, 상기 파형의 변화에 기초하는 것은,상기 발생된 진동파와 감지된 진동파를 비교하여 위상차를 산출하는 것을 포 함하는 냉각 장치의 제어 방법.
- 제 19 항에 있어서, 상기 파형의 변화에 기초하는 것은,상기 발생된 진동파와 감지된 진동파를 비교하여 진폭차를 산출하는 것을 포함하는 냉각 장치의 제어 방법.
- 제 19 항에 있어서,상기 냉매관에 착상된 구간별 서리의 양에 기초하여 제상 시점인지 판단하는 것을 더 포함하는 냉각 장치의 제어 방법.
- 제 24 항에 있어서,상기 제상 시점인 경우 제상 운전을 수행하고,상기 진동파를 발생시키고 상기 진동파를 감지하여 상기 냉매관에 남아 있는 서리의 양을 판단하고,상기 남아 있는 서리의 양에 기초하여 상기 제상 운전의 종료 시점을 판단하는 것을 더 포함하는 냉각 장치의 제어 방법.
- 제 19 항에 있어서,상기 구간별 서리의 양과 기준 양을 각각 비교하고,적어도 하나의 구간의 서리의 양이 상기 기준 양 이상이면 제상 운전을 수행 하는 것을 더 포함하는 냉각 장치의 제어 방법.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020080117363A KR20100058813A (ko) | 2008-11-25 | 2008-11-25 | 냉각 장치 및 그 제어 방법 |
| US12/457,807 US20100126191A1 (en) | 2008-11-25 | 2009-06-22 | Cooling system and method of controlling the same |
| EP09167220A EP2189740A3 (en) | 2008-11-25 | 2009-08-05 | Cooling system with a unit for determining the amount of frost and method of controlling such a system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020080117363A KR20100058813A (ko) | 2008-11-25 | 2008-11-25 | 냉각 장치 및 그 제어 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20100058813A true KR20100058813A (ko) | 2010-06-04 |
Family
ID=42046396
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020080117363A KR20100058813A (ko) | 2008-11-25 | 2008-11-25 | 냉각 장치 및 그 제어 방법 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20100126191A1 (ko) |
| EP (1) | EP2189740A3 (ko) |
| KR (1) | KR20100058813A (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180102678A (ko) * | 2016-01-29 | 2018-09-17 | 엘지전자 주식회사 | 냉장고 |
| KR20220143258A (ko) * | 2021-04-16 | 2022-10-25 | 최철호 | 고효율 창고 시스템의 동작방법 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10315523A1 (de) * | 2003-04-04 | 2004-10-14 | BSH Bosch und Siemens Hausgeräte GmbH | Kältegerät mit adaptiver Abtauautomatik und Abtauverfahren dafür |
| EP2673580A4 (en) * | 2011-02-09 | 2017-04-26 | Control Products, Inc. | System, apparatus, and method for ice detection |
| JP5897994B2 (ja) * | 2012-06-06 | 2016-04-06 | シャープ株式会社 | 空気調和機 |
| EP2743615B1 (en) * | 2012-12-14 | 2020-10-07 | Whirlpool Corporation | Method for controlling the defrost of an evaporator in a refrigeration appliance |
| CN104121755B (zh) * | 2014-08-11 | 2015-11-25 | 顾祥茂 | 冰箱箱体后部内侧积冰检测报警系统 |
| KR102336200B1 (ko) * | 2014-12-24 | 2021-12-08 | 삼성전자주식회사 | 냉장고 |
| KR102292004B1 (ko) * | 2017-04-11 | 2021-08-23 | 엘지전자 주식회사 | 냉장고 |
| CN109990563B (zh) * | 2017-12-29 | 2021-01-01 | 青岛海尔股份有限公司 | 风冷冰箱及其控制方法 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR900000643B1 (ko) * | 1959-03-26 | 1990-02-02 | 산요덴끼 가부시기가이샤 | 인버어터 장치 |
| US4312228A (en) * | 1979-07-30 | 1982-01-26 | Henry Wohltjen | Methods of detection with surface acoustic wave and apparati therefor |
| DE3001019A1 (de) * | 1980-01-12 | 1981-07-23 | Danfoss A/S, 6430 Nordborg | Abtauvorrichtung fuer den verdampfer einer kaelteanlage |
| JPS5712329A (en) * | 1980-06-25 | 1982-01-22 | Hitachi Ltd | Frost sensor |
| US4347709A (en) * | 1981-01-19 | 1982-09-07 | Honeywell Inc. | Demand defrost sensor |
| US4461178A (en) * | 1982-04-02 | 1984-07-24 | The Charles Stark Draper Laboratory, Inc. | Ultrasonic aircraft ice detector using flexural waves |
| FR2555715A1 (fr) * | 1983-11-25 | 1985-05-31 | Applic Thermique Cie Indle | Dispositif detecteur de la formation de givre sur des echangeurs a ailettes |
| US4649713A (en) * | 1984-05-21 | 1987-03-17 | Bezek Donald J | Microwave ice detector |
| US4651535A (en) * | 1984-08-08 | 1987-03-24 | Alsenz Richard H | Pulse controlled solenoid valve |
| US4860551A (en) * | 1987-12-29 | 1989-08-29 | Whirlpool Corporation | Frost sensor for an appliance |
| JPH0886557A (ja) * | 1994-09-19 | 1996-04-02 | Ishizuka Denshi Kk | 着霜検知器 |
| EP0881442B1 (en) * | 1996-02-06 | 2002-07-03 | Ishizuka Electronics Corporation | Frost formation detector |
| US6321588B1 (en) * | 1998-09-11 | 2001-11-27 | Femtometrics, Inc. | Chemical sensor array |
| JP2004340622A (ja) * | 2003-05-13 | 2004-12-02 | Kazumasa Onishi | 管状もしくは溝状の流路を移動する流体の流量の測定方法 |
-
2008
- 2008-11-25 KR KR1020080117363A patent/KR20100058813A/ko not_active Application Discontinuation
-
2009
- 2009-06-22 US US12/457,807 patent/US20100126191A1/en not_active Abandoned
- 2009-08-05 EP EP09167220A patent/EP2189740A3/en not_active Withdrawn
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180102678A (ko) * | 2016-01-29 | 2018-09-17 | 엘지전자 주식회사 | 냉장고 |
| US11079162B2 (en) | 2016-01-29 | 2021-08-03 | Lg Electronics Inc. | Refrigerator |
| KR20220143258A (ko) * | 2021-04-16 | 2022-10-25 | 최철호 | 고효율 창고 시스템의 동작방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100126191A1 (en) | 2010-05-27 |
| EP2189740A2 (en) | 2010-05-26 |
| EP2189740A3 (en) | 2011-04-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20100058813A (ko) | 냉각 장치 및 그 제어 방법 | |
| AU2019232055B2 (en) | Refrigerator and controlling method thereof | |
| EP2217872B1 (en) | Control method of refrigerator | |
| CN102384614B (zh) | 冷却系统和该冷却系统的除霜控制方法 | |
| AU2019243004B2 (en) | Refrigerator and method for controlling same | |
| JPH09236367A (ja) | 線形圧縮機を具備した冷蔵庫制御装置 | |
| WO2008078876A2 (en) | Refrigerator and control method for the same | |
| JP2013228130A (ja) | 冷凍装置 | |
| CN105716352A (zh) | 一种应用超声波与超疏水材料耦合除霜的无霜冰箱及其控制方法 | |
| KR100870541B1 (ko) | 냉장고 및 그 제어방법 | |
| JP5473957B2 (ja) | 冷媒漏洩検知装置及び冷凍空調装置 | |
| KR20150058995A (ko) | 냉장고 및 그 제어 방법 | |
| KR20060110687A (ko) | 냉장고의 제어 방법 | |
| KR20050062824A (ko) | 냉장고의 송풍팬 운전 제어방법 | |
| JP4934302B2 (ja) | 冷却貯蔵庫 | |
| KR101652523B1 (ko) | 냉장고 및 냉장고의 제어방법 | |
| Sutthivirode et al. | Feasibility study and in-depth performance assessment of needle valve using as expansion device in refrigeration system | |
| JP6153439B2 (ja) | 環境試験装置 | |
| KR101164815B1 (ko) | 냉장고 및 그 제어방법 | |
| KR20120011654A (ko) | 냉장고 및 냉장고 제어 방법 | |
| JP6080559B2 (ja) | 自動販売機の冷却装置 | |
| JP2012256298A (ja) | 自動販売機 | |
| KR102268358B1 (ko) | 냉장고의 제어장치 및 이를 이용한 냉장고의 제어방법 | |
| JPH0545447B2 (ko) | ||
| WO2019243591A1 (en) | A method for initiating defrosting of an evaporator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |