KR20070095558A - Cleaner system improving docking structure between robot cleaner and docking station - Google Patents
Cleaner system improving docking structure between robot cleaner and docking station Download PDFInfo
- Publication number
- KR20070095558A KR20070095558A KR1020060025839A KR20060025839A KR20070095558A KR 20070095558 A KR20070095558 A KR 20070095558A KR 1020060025839 A KR1020060025839 A KR 1020060025839A KR 20060025839 A KR20060025839 A KR 20060025839A KR 20070095558 A KR20070095558 A KR 20070095558A
- Authority
- KR
- South Korea
- Prior art keywords
- dust
- docking station
- cleaner
- robot cleaner
- station
- Prior art date
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B32—LAYERED PRODUCTS
- B32B—LAYERED PRODUCTS, i.e. PRODUCTS BUILT-UP OF STRATA OF FLAT OR NON-FLAT, e.g. CELLULAR OR HONEYCOMB, FORM
- B32B27/00—Layered products comprising a layer of synthetic resin
- B32B27/06—Layered products comprising a layer of synthetic resin as the main or only constituent of a layer, which is next to another layer of the same or of a different material
- B32B27/08—Layered products comprising a layer of synthetic resin as the main or only constituent of a layer, which is next to another layer of the same or of a different material of synthetic resin
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04H—BUILDINGS OR LIKE STRUCTURES FOR PARTICULAR PURPOSES; SWIMMING OR SPLASH BATHS OR POOLS; MASTS; FENCING; TENTS OR CANOPIES, IN GENERAL
- E04H6/00—Buildings for parking cars, rolling-stock, aircraft, vessels or like vehicles, e.g. garages
- E04H6/42—Devices or arrangements peculiar to garages, not covered elsewhere, e.g. securing devices, safety devices, monitoring and operating schemes; centering devices
Landscapes
- Electric Vacuum Cleaner (AREA)
- Electric Suction Cleaners (AREA)
Abstract
Description
도 1은 본 발명의 제1실시예에 따른 청소기 시스템의 외관을 보인 사시도.1 is a perspective view showing the appearance of a cleaner system according to a first embodiment of the present invention.
도 2 및 도 3은 도 1에서 로봇청소기와 도킹 스테이션의 구성을 각각 나타낸 측단면도.2 and 3 are side cross-sectional views respectively showing the configuration of the robot cleaner and the docking station in FIG.
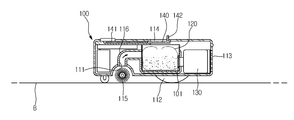
도 4는 도 1의 청소기 시스템에서 로봇청소기가 도킹 스테이션에 결합된 모습을 나타낸 측단면도.Figure 4 is a side cross-sectional view showing the robot cleaner coupled to the docking station in the cleaner system of FIG.
도 5는 본 발명의 제2실시예에 따른 청소기 시스템의 외관을 개략적으로 나타낸 측면도.Figure 5 is a side view schematically showing the appearance of a cleaner system according to a second embodiment of the present invention.
도 6은 도 5에서 도킹 스테이션의 구성을 나타낸 측단면도.6 is a side cross-sectional view showing the configuration of the docking station in FIG.
도 7은 도 5에서 로봇청소기가 도킹 스테이션에 결합된 모습을 나타낸 측단면도.Figure 7 is a side cross-sectional view showing a robot cleaner coupled to the docking station in FIG.
*도면의 주요부분에 대한 부호 설명* * Description of symbols on the main parts of the drawings *
100 : 로봇청소기 110 : 로봇본체 100: robot cleaner 110: robot body
114 : 먼지 배출구 120 : 제1먼지통 114: dust outlet 120: first dust container
140 : 슬라이딩 커버 141 : 탄성부재 140: sliding cover 141: elastic member
200 : 도킹 스테이션 210 : 스테이션 본체 200: docking station 210: station body
211 : 돌출부 212 : 연결구 211: protrusion 212: connector
215 : 흡입구 250 : 흡입관 215: suction port 250: suction pipe
280 : 유로전환장치 280: euro switching device
본 발명은 청소기 시스템에 관한 것으로, 특히 로봇청소기 내에 저장된 먼지를 흡입하여 제거할 수 있도록 설치되는 도킹 스테이션을 가지는 청소기 시스템에 관한 것이다. The present invention relates to a cleaner system, and more particularly to a cleaner system having a docking station which is installed to suck and remove dust stored in the robot cleaner.
청소기는 실내의 먼지 등을 제거하여 실내를 청결하게 하는 기구로서, 저압부의 흡수력을 이용하여 쓰레기나 먼지 등을 빨아들이는 진공청소기가 일반적으로 사용된다. 근래에는 사용자의 노동력 없이도 자동 주행 기능을 통해 스스로 이동하면서 실내 바닥면으로부터 먼지 등의 이물질을 제거하는 로봇청소기가 개발되고 있다. 이하에서는 로봇청소기가 스스로 이동하면서 이물질을 제거하는 것을 '자동 청소'라 하고, 사용자가 청소기를 가지고 이동하면서 이물질을 제거하는 것을 '수동 청소'라 한다. The vacuum cleaner is a mechanism for cleaning the room by removing dust and the like, and a vacuum cleaner that sucks garbage or dust by using the absorption force of the low pressure part is generally used. Recently, a robot cleaner has been developed that removes foreign substances such as dust from the indoor floor while moving by itself through an automatic driving function without a user's labor. Hereinafter, the robot cleaner removes the foreign matter while moving by itself is called 'automatic cleaning', and the user removes the foreign matter while moving with the cleaner is called 'manual cleaning'.
일반적으로 로봇청소기는 실내의 특정 장소에 배치되어 로봇청소기를 충전시키거나 로봇청소기 내에 저장된 먼지를 비우는 기능을 담당하는 스테이션(이하 '도킹 스테이션'이라 한다)과 함께 하나의 시스템을 이루어 사용된다. In general, the robot cleaner is used in a system together with a station (hereinafter referred to as a docking station) that is disposed at a specific place in the room and functions to charge the robot cleaner or to empty dust stored in the robot cleaner.
이러한 청소기 시스템의 예는 미국 공개특허 제2005/0150519호에 개시되어 있다. 개시된 청소기 시스템은 로봇청소기와, 먼지의 흡입을 위한 흡입 유닛을 가지는 도킹 스테이션을 구비한다. 로봇청소기의 하부에는 먼지의 흡입을 위한 흡입구가 형성되어 있고, 이 흡입구에는 먼지를 쓸 수 있도록 브러쉬가 회전 가능하도록 설치된다. 도킹 스테이션의 전방에는 로봇청소기가 올라설 수 있도록 경사면이 형성된 받침대가 구비되어 있고, 그 경사면의 일측에는 먼지의 흡입을 위한 흡입구가 형성되어 있다. 따라서 로봇청소기가 경사면을 따라 올라와서 도킹 위치에 이르면 경사면의 흡입구와 로봇청소기의 흡입구가 서로 마주보게 되고, 이 때 흡입 유닛이 동작하여 로봇청소기로부터 먼지를 제거하게 된다. Examples of such cleaner systems are disclosed in US 2005/0150519. The disclosed cleaner system has a docking station having a robot cleaner and a suction unit for suction of dust. The lower part of the robot cleaner is provided with a suction port for suctioning dust, and the suction port is rotatably installed so that the dust can be used. The front of the docking station is provided with a pedestal formed with an inclined surface so that the robot cleaner can rise, one side of the inclined surface is formed with a suction port for suction of dust. Therefore, when the robot cleaner comes up along the inclined surface and reaches the docking position, the inlet of the inclined surface and the inlet of the robot cleaner face each other. At this time, the suction unit operates to remove dust from the robot cleaner.
위와 같이 종래의 청소기 시스템에서는 도킹 시 로봇청소기의 하부를 통해 먼지를 제거하는 구조를 가지기 때문에 도킹스테이션은 로봇청소기가 올라탈 수 있도록 받침대를 가질 수 밖에 없다. 그러나 이러한 받침대는 도킹스테이션에 이동 기능을 부여하여 별도의 진공청소기로서 활용하고자 하는 경우 불리한 구조물로서 작용한다. As described above, in the conventional cleaner system, the docking station has a pedestal so that the robot cleaner can be lifted because it has a structure to remove dust through the lower part of the robot cleaner when docking. However, this pedestal acts as a disadvantageous structure in order to give the docking station a moving function and utilize it as a separate vacuum cleaner.
또한 종래의 청소기 시스템에서는 로봇청소기의 흡입구를 통해 다시 먼지를 배출시키는 구조로 되어 있는데, 이러한 구조로 인해 종래의 로봇시스템은 다음과 같은 문제점을 가진다. 먼저, 먼지를 흡입하는 흡입구 부위는 먼지를 효과적으로 흡입할 수 있도록 넓게 형성된다는 점을 고려할 때 위와 같은 구조로는 도킹 스테이션의 흡입력을 효율적으로 활용할 수 없게 된다. 뿐만 아니라 로봇청소기의 흡입구에는 브러쉬가 설치되어 있는데, 도킹 스테이션이 먼지를 흡입할 때 로봇청소기 내의 먼지가 나오면서 브러쉬에 걸리게 되어 로봇청소기가 다시 청소 작업을 할 때 브러쉬에 걸려 있던 먼지가 오히려 실내 바닥을 더럽히는 문제가 생길 수 있다. In addition, the conventional vacuum cleaner system has a structure for discharging the dust again through the suction port of the robot cleaner, due to this structure, the conventional robot system has the following problems. First, in consideration of the fact that the suction inlet part for sucking dust is formed to be able to suck dust effectively, the above structure does not effectively utilize the suction power of the docking station. In addition, a brush is installed at the inlet of the robot cleaner, and when the docking station inhales the dust, the dust inside the robot cleaner is caught and caught by the brush. Defilement problems can occur.
본 발명은 이와 같은 문제점을 해결하기 위한 것으로서, 본 발명의 목적은 로봇청소기와 도킹 스테이션의 도킹 구조를 개선하여 도킹 스테이션의 먼지 제거 성능을 향상시킨 청소기 시스템을 제공하는데 있다. The present invention is to solve such a problem, an object of the present invention is to provide a cleaner system that improves the dust removal performance of the docking station by improving the docking structure of the robot cleaner and the docking station.
또한 본 발명의 다른 목적은 로봇청소기 내의 먼지를 제거하는 기능을 하는도킹 스테이션을 이용하여 사용자가 수동 청소를 할 수 있도록 한 청소기 시스템을 제공하는데 있다. In addition, another object of the present invention to provide a cleaner system that allows the user to manually clean using a docking station that functions to remove dust in the robot cleaner.
이러한 목적을 달성하기 위한 본 발명에 따른 청소기 시스템은 먼지의 저장을 위한 먼지통을 가지는 로봇청소기와, 상기 로봇청소기가 도킹된 상태에서 상기 먼지통 내의 먼지를 흡입할 수 있도록 설치되는 도킹 스테이션을 구비하는 청소기 시스템에 있어서, 상기 로봇청소기는 상기 먼지통 내의 먼지를 상기 도킹 스테이션으로 배출하기 위한 먼지 배출구와, 도킹 시에 상기 도킹 스테이션에 의해 슬라이딩 이동하며 상기 먼지 배출구를 개방하는 슬라이딩 커버를 구비하는 것을 특징으로 한다.The cleaner system according to the present invention for achieving the above object is a cleaner having a robot cleaner having a dust container for storing dust, and a docking station installed to suck dust in the dust container while the robot cleaner is docked. In the system, the robot cleaner is characterized in that it comprises a dust outlet for discharging the dust in the dust container to the docking station, and a sliding cover for sliding the opening and opening the dust outlet by the docking station when docked. .
상기 로봇청소기는 상기 먼지 배출구를 폐쇄하는 방향으로 상기 슬라이딩 커 버를 탄성 바이어스시키는 탄성부재를 더 구비할 수 있다.The robot cleaner may further include an elastic member for elastically biasing the sliding cover in a direction of closing the dust outlet.
상기 먼지 배출구는 상기 로봇청소기의 상면 또는 측면에 형성되고, 상기 먼지통은 변형이 가능한 재질로 형성되는 것이 바람직하다.The dust outlet is formed on the top or side of the robot cleaner, the dust container is preferably formed of a material that can be deformed.
상기 도킹 스테이션은 상기 로봇청소기의 도킹 시에 상기 슬라이딩 커버를 개방시킬 수 있도록 돌출된 돌출부를 가지는 스테이션 본체와, 상기 슬라이딩 커버가 개방됨에 따라 상기 먼지 배출구와 연통되는 연결구를 가진다. The docking station has a station body having a protruding portion protruding to open the sliding cover when the robot cleaner is docked, and a connection port communicating with the dust outlet as the sliding cover is opened.
또 상기 도킹 스테이션은 흡입구가 형성된 스테이션 본체와, 먼지의 흡입을 위해 상기 스테이션 본체의 내부에 장착되는 송풍장치와, 사용자가 상기 도킹 스테이션을 이용하여 수동 청소를 할 수 있도록 상기 흡입구에 연결되는 흡입관을 가진다. The docking station may include a station main body having a suction port, a blower mounted inside the station main body for suction of dust, and a suction pipe connected to the suction port so that a user can manually clean the docking station. Have
또한 본 발명에 따른 청소기 시스템은 제1먼지통을 가지는 로봇청소기와, 상기 제1먼지통 내에 저장된 먼지를 제거할 수 있도록 마련되는 도킹 스테이션을 구비하는 청소기 시스템에 있어서, 상기 로봇청소기는 상기 도킹 스테이션으로 먼지를 배출하기 위한 먼지 배출구와, 도킹 시에 상기 도킹 스테이션과 상호 작용하여 슬라이딩 이동하면서 상기 먼지 배출구를 개방하는 슬라이딩 커버를 구비하고, 상기 도킹 스테이션은 상기 슬라이딩 커버의 개방 시에 상기 먼지 배출구와 연통되는 연결구 및 바닥의 먼지를 상기 스테이션 본체의 내부로 흡입하기 위한 흡입구를 가지는 스테이션 본체와, 상기 연결구와 흡입구를 통해 유입되는 먼지를 저장하기 위한 제2먼지통과, 먼지의 흡입을 위한 흡입력을 발생시키는 송풍장치와, 상기 송풍장치의 흡입력이 상기 연결구 또는 흡입구에 선택적으로 작용할 수 있도록 상기 스 테이션 본체의 내부에 설치되는 유로전환장치를 포함하는 것을 특징으로 한다. In addition, the cleaner system according to the present invention is a cleaner system having a robot cleaner having a first dust container, and a docking station provided to remove dust stored in the first dust container, wherein the robot cleaner is dust to the docking station And a dust cover for discharging the dust outlet, and a sliding cover which opens the dust outlet while slidingly interacting with the docking station when docking, and the docking station communicates with the dust outlet upon opening of the sliding cover. A station body having a suction port for sucking dust from a connector and a floor into the station body, a second dust container for storing dust flowing through the connector and the suction port, and a blowing air generating suction force for suctioning dust Device and the suction force of the blower It characterized in that it comprises a flow channel switching device that is installed in the station body to selectively act as a suction port or connector group.
이하에서는 본 발명에 따른 바람직한 실시예를 첨부된 도면을 참조하여 상세히 설명한다. 도 1은 본 발명의 제1실시예에 따른 청소기 시스템의 외관을 보인 사시도이고, 도 2 및 도 3은 도 1에서 로봇청소기와 도킹 스테이션의 구성을 각각 나타낸 측단면도이며, 도 4는 도 1의 청소기 시스템에서 로봇청소기가 도킹 스테이션에 결합된 모습을 나타낸 측단면도이다. Hereinafter, with reference to the accompanying drawings, preferred embodiments of the present invention will be described in detail. 1 is a perspective view showing the appearance of a cleaner system according to a first embodiment of the present invention, Figures 2 and 3 are side cross-sectional views showing the configuration of the robot cleaner and the docking station in Figure 1, Figure 4 is Side view showing the robot cleaner coupled to the docking station in the cleaner system.
도 1 내지 도 4에 도시된 바와 같이, 본 발명의 제1실시예에 따른 청소기 시스템은 먼지의 유입을 위한 유입구(111)가 형성된 로봇본체(110)와 유입된 먼지의 저장을 위해 로봇본체(110)의 내부에 설치되는 제1먼지통(120)를 가지는 로봇청소기(100)와, 이 로봇청소기(100)가 도킹된 상태에서 제1먼지통(120) 내의 먼지를 흡입하여 제거하기 위한 도킹 스테이션(200)을 구비한다. 로봇청소기(100)는 청소하고자 하는 구역을 자율적으로 이동하며 자동 청소를 하다가 제1먼지통(120) 내에 일정 수준 이상의 먼지가 쌓이면 먼지의 제거를 위해 도킹 스테이션(200)으로 복귀한다. As shown in Figures 1 to 4, the cleaner system according to the first embodiment of the present invention is a robot main body (110) formed with an
도 2에 도시된 바와 같이, 로봇청소기(100)는 로봇본체(110)의 내부에 설치되어 먼지의 흡입을 위한 동력을 제공하는 제1송풍장치(130)를 가지고, 제1송풍장치(130)와 제1먼지통(120) 사이에는 제1송풍장치(130)로 먼지가 유입되는 것을 방지하는 필터(101)가 설치된다. 도면에 도시되지는 않았으나, 제1송풍장치(130)는 흡입모터와 흡입모터에 의해 회전하는 송풍팬을 포함하여 구성되고, 로봇본체(110)의 내부에는 제1먼지통(120) 내에 쌓인 먼지의 양을 감지할 수 있도록 먼지량 감지 센서가 설치된다. As shown in FIG. 2, the
로봇본체(110)의 하부에는 로봇청소기(100)의 이동을 위한 한 쌍의 구동륜(112)이 설치되는데, 한 쌍의 구동륜(112)은 그 각각을 회전시키기 위한 구동모터(미도시)에 의해 선택적으로 구동되어 로봇청소기(100)가 필요한 방향으로 움직일 수 있도록 한다. The lower part of the
또한 로봇청소기(100)는 청소 구역의 바닥(B)으로부터 먼지를 주워 넣기 위해 로봇본체(110)의 하부에 형성되는 유입구(111)와, 제1송풍장치(130)에 의해 발생한 공기의 흐름을 로봇본체(110)의 외부로 배출시키기 위한 제1토출구(113)와, 로봇청소기(100)가 도킹 스테이션(200)에 도킹되었을 때 도킹 스테이션(200)으로 먼지를 배출할 수 있도록 로봇본체(110)에 형성되는 먼지 배출구(114)를 가진다. In addition, the
로봇본체(110)에서 유입구(111)에 인접한 곳에는 바닥(B)의 먼지를 쓸어 올리기 위한 브러쉬(115)가 회전 가능하게 설치되고, 유입구(111)와 제1먼지통(120) 사이에는 이들을 연결하는 유입관(116)이 위치된다. Where the
특히 본 발명에서 먼지 배출구(114)는 로봇본체(110)의 상면에 형성되는데, 그러면 종래기술과 같이 로봇본체(110)의 유입구(111)를 이용하여 다시 먼지를 빼내는 경우와 비교하여 제1먼지통(120) 내의 먼지가 보다 효과적으로 제거되고, 또 제1먼지통(120) 내의 먼지를 빼내는 과정에서 먼지가 브러쉬(115)에 걸리거나 다시 바닥(B)으로 누설되는 일이 생기지 않게 된다. In particular, in the present invention, the
먼지 배출구(114)는 제1먼지통(120)에 연통되도록 형성되는데, 이러한 먼지 배출구(114)에는 로봇청소기(100)가 도킹될 때에 도킹 스테이션(200)에 의해 슬라 이딩 이동하며 먼지 배출구(114)를 개방하는 슬라이딩 커버(140)가 설치된다. 슬라이딩 커버(140)는 로봇본체(110)의 상면에 슬라이딩 이동 가능하게 설치되고, 그 일측 단부에는 먼지 배출구(114)를 폐쇄하는 방향으로 슬라이딩 커버(140)를 탄성 바이어스시키는 탄성부재(141)가 장착된다. 또 슬라이딩 커버(140)의 타측 단부에는 도킹 시 도킹 스테이션(200)에 걸려 슬라이딩 커버(140)가 개방될 수 있도록 걸림부(142)가 마련된다. The
따라서 슬라이딩 커버(140)는 로봇청소기(100)가 자동 청소를 할 때에 먼지 배출구(114)를 폐쇄하여 제1송풍장치(130)의 흡입력이 먼지 배출구(114)를 통해 누설되는 것을 방지하고, 로봇청소기(100)가 도킹 스테이션(200)에 도킹되어 제1먼지통(120) 내의 먼지가 제거될 때에는 먼지 배출구(114)를 개방하여 제1먼지통(120)내의 먼지가 도킹 스테이션(200) 쪽으로 이동할 수 있도록 한다. Therefore, the
한편 제1먼지통(120)은 천과 같이 자유로운 변형이 가능한 재질로 형성되는 것이 바람직한데, 이는 제1먼지통(120)에서 먼지가 제거될 때 도킹 스테이션(200)의 흡입력에 의해 제1먼지통(120)이 변형되면서 먼지 배출구(114)와 연결구(212) 사이의 틈새를 막을 수 있도록 하기 위한 것이다(도 4 참조). On the other hand, the
도 3에 도시된 바와 같이, 도킹 스테이션(200)은 스테이션 본체(210)와, 스테이션 본체(210)의 내부에 설치되어 제1먼지통(120)의 먼지 제거 시에 먼지의 흡입을 위한 동력을 제공하는 제2송풍장치(220)와, 흡입된 먼지의 저장을 위해 스테이션 본체(210)의 내부에 마련되는 제2먼지통(230)을 가진다. As shown in FIG. 3, the
스테이션 본체(210)는 로봇청소기(100)가 도킹 스테이션(200)으로 복귀하였 을 때 로봇청소기(100)의 상부를 덮을 수 있도록 전방을 향하여 돌출되고 그 하부에 일정한 수용 공간(S)을 형성하는 돌출부(211)를 가진다. 특히 돌출부(211)의 하부는 로봇청소기(100)의 도킹 시에 슬라이딩 커버(140)의 일단에 접촉하여 슬라이딩 커버(140)를 이동시킬 수 있도록 구성되는데, 본 실시예서는 돌출부(211)가 슬라이딩 커버의 걸림부(142)에 접하여 슬라이딩 커버(140)를 이동시키는 경우를 나타내었다. 로봇청소기(100)가 도킹 스테이션(200)에 도킹될 때 돌출부(211)의 하부에서 먼지 배출구(114)에 대응하는 지점에는 로봇청소기(100)로부터 먼지를 전달받기 위한 연결구(212)가 형성된다. 따라서 로봇청소기(100)의 도킹 과정에서 슬라이딩 커버(140)가 개방되면 도킹 스테이션(200)의 연결구(212)는 로봇청소기(100)의 먼지 배출구(114)와 연통된다. 연결구(212)는 도 3과 같이 항상 개방되어 있을 수도 있고, 연결구(212)를 개폐할 수 있는 별도의 개폐부재(미도시)가 연결구(212)에 설치되어 로봇청소기(100)가 도킹될 때에만 연결구(212)가 개방되도록 하는 것도 가능하다. The
연결구(212)와 제2먼지통(230) 사이에는 연결구(212)를 통해 전달되는 먼지를 제2먼지통(230)로 안내하는 유로(213)가 마련된다. 또 스테이션 본체(210)의 후방에는 제2송풍장치(220)에 의해 발생한 공기의 흐름을 스테이션 본체(210)의 외부로 배출시키기 위한 제2토출구(214)가 형성된다. A
이하에서는 본 발명의 요지와 관련한 청소기 시스템의 동작을 설명한다. 청소가 시작되면 로봇청소기(100)는 자율적으로 이동하면서 청소하고자 하는 영역의 이물질을 제거한다. 이 때 로봇청소기(100)의 슬라이딩 커버(140)는 탄성부재(141) 의 탄성력을 통해 먼지 배출구(114)를 폐쇄하여 제1송풍장치(130)에 의한 흡입력이 먼지 배출구(114)로 누설되는 것을 방지한다. 그러면 바닥(B)의 먼지는 유입구(111) 및 유입관(116)을 통해 흡입되어 제1먼지통(120)에 수집된다. 제1먼지통(120)에 일정 수준 이상의 먼지가 쌓이면 로봇청소기(100)는 청소를 중단하고 먼지의 제거를 위해 도킹 스테이션(200) 쪽으로 복귀한다. 이와 같은 복귀 과정에서 로봇청소기(100)가 돌출부(211) 하부의 수용 공간(S)으로 진입하면 도킹 스테이션(200)의 돌출부(211)가 슬라이딩 커버(140)의 걸림부(142)를 밀게 되고 로봇청소기(100)가 계속하여 이동함에 따라 슬라이딩 커버(140)는 완전히 개방되게 된다. 그러면 로봇청소기(100)의 먼지 배출구(114)가 노출되어 도킹 스테이션(200)의 연결구(212)는 서로 연통된다. 이러한 도킹 과정이 완료되면, 제2송풍장치(220)가 동작하여 로봇청소기(100)의 제1먼지통(120)에 저장되어 있던 먼지를 제2먼지통(230) 쪽으로 흡입하여 제1먼지통(120) 내의 먼지를 제거한다. 이 때 제1먼지통(120)이 자유로운 변형이 가능한 재질로 형성되면 제1먼지통(120)의 일부가 제2송풍장치(220)의 흡입력에 의해 도킹 스테이션(200)의 쪽으로 끌려 들어가면서 먼지 배출구(114)와 연결구(212) 사이의 틈새를 없애 주므로 보다 효율적으로 먼지가 제거되게 된다. Hereinafter, the operation of the cleaner system related to the gist of the present invention will be described. When the cleaning starts, the
위의 실시예에서는 먼지 배출구(114)와 슬라이딩 커버(140)가 로봇본체(110)의 상면에 위치되는 경우에 대해 설명하였으나, 적절한 구조 변경을 통해 먼지 배출구(114)와 슬라이딩 커버(140)를 로봇본체(110)의 측면에 위치시키는 것도 가능하다. In the above embodiment, the
도 5는 본 발명의 제2실시예에 따른 청소기 시스템의 외관을 개략적으로 나타낸 측면도이고, 도 6은 도 5에서 도킹 스테이션의 구성을 나타낸 측단면도이며, 도 7은 도 5에서 로봇청소기가 도킹 스테이션에 결합된 모습을 나타낸 측단면도이다. 본 실시예는 먼지 제거를 위한 도킹 스테이션을 일반적인 진공청소기로 활용하는 예에 관한 것이다. 이하에서는 도 1의 실시예와 비교하여 동일한 구성요소는 같은 부호를 사용하여 표시하고, 본 실시예의 특징적인 사항만을 설명한다. Figure 5 is a side view schematically showing the appearance of the cleaner system according to a second embodiment of the present invention, Figure 6 is a side cross-sectional view showing the configuration of the docking station in Figure 5, Figure 7 is a robot cleaner docking station in Figure 5 Side cross-sectional view showing the coupling to. This embodiment relates to an example of using a docking station for dust removal as a general vacuum cleaner. In the following description, the same components as those in the embodiment of FIG. 1 are denoted by the same reference numerals, and only characteristic features of the present embodiment will be described.
도 5 내지 도 7에 도시된 바와 같이, 본 발명의 제2실시예에 따른 청소기 시스템의 도킹 스테이션(200)은 바닥(B)의 먼지나 이물질 등을 흡입하기 위한 흡입체(240)와, 제2송풍장치(220)에서 발생한 흡입력이 흡입체(240)에 전달될 수 있도록 흡입체(240)와 스테이션 본체(210)를 연결하는 흡입관(250)을 가진다. As shown in FIGS. 5 to 7, the
흡입관(250)은 제1흡입관(251)과 제2흡입관(252)을 포함하여 구성되며, 제1흡입관(251)과 제2흡입관(252) 사이에는 사용자가 용이하게 조작할 수 있도록 각종 버튼이 설치되어 있는 손잡이(253)가 마련된다. 제1흡입관(251)은 신축성이 있는 주름관으로 형성되어 그 일단이 스테이션 본체(210)의 흡입구(215)에 연결되고 타단은 손잡이(253)에 연결된다. 제2흡입관(252)은 그 일단이 흡입체(240)에 연결되고 타단은 손잡이(253)에 연결되어 사용자가 서 있는 상태에서 자유롭게 이동하면서 바닥의 이물질을 수동 청소할 수 있도록 한다. The
흡입구(215)와 연결구(212) 사이에는 제1흡입유로(260)가 마련되고, 이 제1흡입유로(260)와 제2먼지통(230)의 사이에는 제1흡입유로(260)에 연통되어 제1흡입유로(260)를 통해 흡입되는 먼지를 제2먼지통(230)로 안내하는 제2흡입유로(270)가 마련된다. 제1흡입유로(260)는 제2흡입유로(270)가 연통되는 지점을 기준으로 흡입구(215) 쪽에 위치되는 제1유로부(261)와, 연결구(212) 쪽에 위치되는 제2유로부(262)로 구분된다. A
제1흡입유로(260)에는 제2흡입유로(270)가 제1유로부(261)와 제2유로부(262) 중 어느 하나에 선택적으로 연통되도록 하는 유로전환장치(280)가 설치된다. 유로전환장치(280)가 제1유로부(261)를 제2흡입유로(270)에 연통시킬 때에는 제2송풍장치(220)의 흡입력이 흡입구(215)를 통해 흡입체(240) 쪽으로 작용하므로 도킹 스테이션(200)을 일반적인 진공청소기로 활용할 수 있다(도 6참조). 또 로봇청소기(100) 내의 먼지를 제거하고자 할 때에는 유로전환장치(280)는 연결구(212)와 연통되어 있는 제2유로부(262)를 제2흡입유로(270)에 연통시킴으로써 제2송풍장치(220)의 흡입력이 연결구(212), 먼지 배출구(114)를 통해 제1먼지통(120) 쪽으로 작용하도록 한다. 그러면 로봇청소기(100)의 제1먼지통(120)에 저장되어 있던 먼지가 제2먼지통(230) 쪽으로 흡입되어 제1먼지통(120) 내에 쌓여 있던 먼지가 깨끗이 청소된다(도 7 참조). The
유로전환장치(280)는 제1흡입유로(260) 내에서 상하 방향으로 이동 가능하도록 설치되고, 유로전환장치(280)의 내부에는 유로전환장치(280)가 아래쪽으로 이동하였을 때 제1유로부(261)와 제2흡입유로(270)를 연결하는 제1연결유로(281)와, 유로전환장치(280)가 위쪽으로 이동하였을 때 제2유로부(262)와 제2흡입유로(270)를 연결하는 제2연결유로(282)가 마련된다. 제1연결유로(281)와 제2연결유로(282)의 사이에는 제1연결유로(281)와 제2연결유로(282)를 구획하는 구획부(283)가 위치된 다. The flow
도면에 도시되지는 않았으나, 유로전환장치(280)는 모터, 랙기어, 피니언 기언 등을 포함하여 구성되는 구동부를 통해 상하 방향으로 이동 가능하도록 설치될 수 있다. Although not shown in the drawings, the flow
위에서 설명한 유로전환장치(280)의 구성은 예시적인 것으로서, 제2송풍장치(220)의 흡입력이 흡입구(215) 또는 연결구(212)에 선택적으로 작용할 수 있도록 유로를 전환할 수 있는 것이라면 유로전환장치(280)는 다양한 형태(예를 들면, 밸브 타입)로 구현될 수 있을 것이다. Configuration of the flow
위에서 설명한 바와 같이, 본 발명은 로봇청소기의 상면이나 측면에 형성된 먼지 배출구를 통해 도킹 스테이션이 먼지를 흡입할 수 있게 구성하여 받침대와 같은 별도의 구조물이 없이도 먼지의 제거를 위한 도킹 동작이 원활히 이루어질 수 있는 효과가 있다. 이에 따라 도킹 스테이션은 실내 바닥을 자유롭게 이동하는데 있어 장애물이 되는 구조물을 가지지 않으므로 도킹 스테이션을 일반적인 진공청소기로 활용할 수 있는 편리함이 있다. As described above, the present invention is configured so that the docking station can suck the dust through the dust outlet formed on the upper surface or the side of the robot vacuum cleaner can be made smoothly docking operation for removing the dust without a separate structure such as a pedestal It has an effect. Accordingly, since the docking station does not have a structure that is an obstacle to freely moving the indoor floor, there is a convenience that the docking station can be used as a general vacuum cleaner.
또한 본 발명에서 로봇청소기는 먼지 유입구와는 별도로 형성된 먼지 배출구를 통해 먼지를 배출하므로 먼지 흡입 과정에서 먼지가 누설되는 것을 방지할 수 있는 효과가 있다. In addition, in the present invention, since the robot cleaner discharges dust through a dust outlet formed separately from the dust inlet, there is an effect of preventing dust from leaking during the dust suction process.
뿐만 아니라 로봇청소기의 먼지통을 변형이 자유로운 재질로 구성하는 때에는 로봇청소기와 도킹 스테이션의 도킹 부분에서 송풍장치의 흡입력이 손실되는 것 을 감소시킬 수 있는 효과가 있다. In addition, when the dust container of the robot cleaner is formed of a material that is free of deformation, the suction force of the blower is reduced in the docking part of the robot cleaner and the docking station.
Claims (7)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020060025839A KR20070095558A (en) | 2006-03-21 | 2006-03-21 | Cleaner system improving docking structure between robot cleaner and docking station |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020060025839A KR20070095558A (en) | 2006-03-21 | 2006-03-21 | Cleaner system improving docking structure between robot cleaner and docking station |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20070095558A true KR20070095558A (en) | 2007-10-01 |
Family
ID=38802752
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020060025839A KR20070095558A (en) | 2006-03-21 | 2006-03-21 | Cleaner system improving docking structure between robot cleaner and docking station |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20070095558A (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100849554B1 (en) * | 2007-07-12 | 2008-07-31 | 엘지전자 주식회사 | (dust-emptying system for robot vacuum cleaner |
| CN105640441A (en) * | 2014-11-10 | 2016-06-08 | 江苏美的清洁电器股份有限公司 | Sweeping robot |
| KR20170010402A (en) * | 2014-07-04 | 2017-01-31 | 도시바 라이프스타일 가부시키가이샤 | Electric vacuum cleaner |
| CN118402723A (en) * | 2024-06-28 | 2024-07-30 | 追觅创新科技(苏州)有限公司 | Vacuum cleaning device and vacuum cleaning system |
-
2006
- 2006-03-21 KR KR1020060025839A patent/KR20070095558A/en not_active Application Discontinuation
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100849554B1 (en) * | 2007-07-12 | 2008-07-31 | 엘지전자 주식회사 | (dust-emptying system for robot vacuum cleaner |
| KR20170010402A (en) * | 2014-07-04 | 2017-01-31 | 도시바 라이프스타일 가부시키가이샤 | Electric vacuum cleaner |
| CN105640441A (en) * | 2014-11-10 | 2016-06-08 | 江苏美的清洁电器股份有限公司 | Sweeping robot |
| CN118402723A (en) * | 2024-06-28 | 2024-07-30 | 追觅创新科技(苏州)有限公司 | Vacuum cleaning device and vacuum cleaning system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20070074146A (en) | Cleaner system | |
| KR101330734B1 (en) | Robot cleaner system having robot cleaner and docking station | |
| KR101204440B1 (en) | Robot cleaner system having robot cleaner and docking station | |
| KR20070094288A (en) | Robot cleaner system | |
| KR101202916B1 (en) | Dirt removal system of the robot cleaner | |
| KR20070074147A (en) | Cleaner system | |
| KR20070103248A (en) | Cleaner system | |
| CN109700378B (en) | Surface cleaning head for a vacuum cleaner | |
| CN109528075B (en) | Wet surface cleaning base and vacuum cleaner | |
| US20230148812A1 (en) | Station and dust removal system including the same | |
| KR20220010298A (en) | Cleaner | |
| US7703172B2 (en) | Complex type cleaner | |
| US20230136405A1 (en) | Vacuum cleaner | |
| KR20070095558A (en) | Cleaner system improving docking structure between robot cleaner and docking station | |
| CN216495160U (en) | Automatically cleaning collection dirt seat and dust collecting system | |
| US20060085941A1 (en) | Complex type cleaner | |
| CN215899556U (en) | Slop pail, separation structure, ground washing assembly and ground washing machine | |
| KR100707354B1 (en) | Robot cleaner system | |
| JP4618060B2 (en) | Electric vacuum cleaner | |
| KR20070111628A (en) | Robot cleaner system | |
| CN114587219A (en) | Self-cleaning dust collecting seat and dust collecting system | |
| KR101290095B1 (en) | Robot cleaner system having robot cleaner and docking station | |
| AU2022249323A1 (en) | Floor cleaner | |
| US20230329495A1 (en) | Cleaner | |
| CN218792085U (en) | Wet-type surface cleaning device with sewage bucket |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |