KR102350621B1 - Lidar apparatus - Google Patents
Lidar apparatus Download PDFInfo
- Publication number
- KR102350621B1 KR102350621B1 KR1020170095130A KR20170095130A KR102350621B1 KR 102350621 B1 KR102350621 B1 KR 102350621B1 KR 1020170095130 A KR1020170095130 A KR 1020170095130A KR 20170095130 A KR20170095130 A KR 20170095130A KR 102350621 B1 KR102350621 B1 KR 102350621B1
- Authority
- KR
- South Korea
- Prior art keywords
- light
- source
- unit
- lidar device
- light guide
- Prior art date
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4814—Constructional features, e.g. arrangements of optical elements of transmitters alone
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4816—Constructional features, e.g. arrangements of optical elements of receivers alone
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4817—Constructional features, e.g. arrangements of optical elements relating to scanning
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/26—Optical coupling means
- G02B6/32—Optical coupling means having lens focusing means positioned between opposed fibre ends
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/18—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors
- G02B7/182—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors for mirrors
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/18—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors
- G02B7/182—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors for mirrors
- G02B7/1821—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors for mirrors for rotating or oscillating mirrors
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B2006/0098—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings for scanning
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Optics & Photonics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
본 발명에 따른 라이다 장치는 소스광을 발생하는 광원; 상기 소스광의 광경로 상에 회전가능하게 배치되어 그 반사면의 방향이 시간적으로 가변되며, 상기 소스광을 시간적으로 방향을 달리하여 스캔광으로서 상방으로 반사시키는 회전거울; 상기 회전거울의 상부에 배치되어, 상기 스캔광이 라이다 장치의 전방으로 출사되는 각도를 확장시키고, 상기 스캔광이 외부 반사체에 의해 반사되어 귀환하는 수신광을 하방으로 굴절시키는 렌즈부; 상기 회전거울의 앞에 배치되고, 상기 렌즈부에 의해 굴절되는 수신광을 반사시키며, 상기 회전거울에서 출사되는 상기 스캔광의 광경로가 차단되지 않도록 상기 회전거울과 대향하는 위치에 스캔광 투과부가 형성되어 있는 수신거울; 상기 수신거울에 의해 반사되는 수신광을 가이딩하는 광 가이드부; 및 상기 광 가이드부에 의해 가이딩되는 수신광을 검출하는 광 검출부를 포함한다. 이러한 본 발명에 의하면, 외부 반사체에 의해 반사되어 귀환하는 수신광을 광 가이드부에 의해 광 검출부 방향으로 가이딩함으로써, 광 검출부가 상기 수신광의 수신 효율을 증가시켜 보다 정확한 거리 측정이 가능해질 수 있다.A lidar device according to the present invention includes a light source for generating a source light; a rotating mirror rotatably disposed on the optical path of the source light, the direction of the reflective surface is temporally variable, and the direction of the source light is changed temporally to reflect upwardly as scan light; a lens unit disposed on the rotating mirror to extend the angle at which the scan light is emitted to the front of the lidar device and downwardly refract the received light that is reflected by the external reflector and returned to the scan light; It is disposed in front of the rotating mirror, reflects the received light refracted by the lens unit, and a scan light transmitting unit is formed at a position opposite to the rotating mirror so that the optical path of the scan light emitted from the rotating mirror is not blocked. receiving mirror; a light guide unit for guiding the received light reflected by the receiving mirror; and a light detection unit configured to detect the received light guided by the light guide unit. According to the present invention, by guiding the received light reflected by the external reflector and returned in the direction of the light detection unit by the light guide unit, the light detection unit increases the reception efficiency of the received light, thereby enabling more accurate distance measurement. have.
Description
본 발명은 광을 이용하여 외부 반사체까지의 거리와 외부 반사체의 형태를 측정하는 라이다 장치에 관한 것이다.The present invention relates to a lidar device for measuring a distance to an external reflector and a shape of an external reflector using light.
라이다(LIDAR: Light Detection And Ranging)는 광을 이용하여 대상물을 검출하고 대상물까지의 거리를 측정하는 것을 말한다. 라이다는 기능에 있어서 레이다(RADAR: Radio Detection And Rangin)와 유사하지만, 전파를 이용하는 레이다와 달리 광을 이용한다는 점에서 차이가 있으며, 이러한 점에서 라이다를 '영상 레이다'라고 칭하기도 한다. 광과 마이크로파 간의 도플러 효과 차이로 인하여, 라이다는 레이다에 비하여 방위 분해능, 거리 분해능 등이 우수하다는 특징을 가진다.LIDAR (Light Detection And Ranging) refers to detecting an object using light and measuring the distance to the object. LiDAR is similar to Radar (Radio Detection And Rangin) in function, but it is different from radar using radio waves in that it uses light. Due to the difference in the Doppler effect between light and microwave, lidar has superior azimuth resolution and distance resolution compared to radar.
라이다 장치는 위성이나 항공기에서 레이저 펄스를 방출하고, 대기 중의 입자에 의해 후방 산란되는 펄스를 지상관측소에서 수신하는 항공 라이다자 주류를 이루어왔으며, 이러한 항공 라이다는 바람 정보와 함께, 먼지, 연기, 에어로졸, 구름 입자 등의 존재와 이동을 측정하고, 대기 중 먼지입자의 분포 또는 대기 오염도를 분석하는데 사용되어 왔다. 그런데, 최근에는 송신계와 수신계가 모두 지상에 배치되어 장애물 탐지, 지형 모델링, 대상물까지의 위치 획득 기능을 수행하는 지상 라이다도 감시정찰로봇, 전투로봇, 무인수상함, 무인헬기 등의 국방분야나, 민수용 이동로봇, 지능형자동차, 무인자동차 등의 민수용 분야에 대한 적용을 염두에 두고 활발히 연구가 이루어지고 있다.LiDAR devices emit laser pulses from satellites or aircraft and receive pulses backscattered by particles in the atmosphere from the ground observatory, which has been the mainstream of aviation lidar devices. , and has been used to measure the presence and movement of aerosols, cloud particles, etc., and to analyze the distribution of dust particles in the air or the degree of air pollution. However, in recent years, both the transmitter and receiver are deployed on the ground to detect obstacles, model the terrain, and acquire the location of the target. , research is being actively conducted with the application to civil fields such as mobile robots, intelligent cars, and unmanned vehicles in mind.
지상 라이다 장치는, 통상적으로 레이저 펄스를 방출하는 송신 광학계와, 외부 반사체에 의해 반사되는 수신광을 수신하는 수신 광학계와, 상기 객체의 위치를 결정하는 분석부로 구성된다. 여기서 분석부는 반사광에 대하여 송수신에 소요된 시간을 결정하여 외부 반사체까지의 거리를 계산하고, 특히 각 방향으로부터 수신되는 수신광에 대하여 거리를 계산함으로써 화각(FOV: Field of View)에 상응한 영상 내에서 거리맵을 작성할 수도 있다.The terrestrial lidar device is typically composed of a transmission optical system that emits laser pulses, a reception optical system that receives reception light reflected by an external reflector, and an analysis unit that determines the position of the object. Here, the analysis unit calculates the distance to the external reflector by determining the time taken for transmission and reception with respect to the reflected light, and in particular, by calculating the distance for the received light received from each direction, within the image corresponding to the Field of View (FOV). You can also create a street map from
그런데 종래의 지상 라이다 장치는 화각에 상응하게 빔 폭이 넓은 레이저를 방출하고, 화각 내의 모든 방향으로부터 동시에 수신광을 획득하여 외부 반사체까지의 거리를 획득하기 때문에, 출력이 매우 높은 레이저 모듈을 필요로 하며, 따라서 장치의 가격이 매우 비싸다는 문제점이 있다. 또한, 출력이 높은 레이저 모듈은 크기가 크기 때문에 라이다 장치의 전체 크기를 키우는 요인으로 작용하게 된다.However, the conventional terrestrial LIDAR device emits a laser with a wide beam width corresponding to the angle of view, and simultaneously acquires received light from all directions within the angle of view to obtain the distance to the external reflector, so a laser module with very high output is required. Therefore, there is a problem that the price of the device is very expensive. In addition, since the laser module with high output has a large size, it acts as a factor to increase the overall size of the lidar device.
특히, 전방향 스캔(Panoramic Scanning) 기능을 구비하는 라이다 장치의 경우, 송신 광학계와 수신 광학계를 포함하여 장치 전체가 회전하여 동작한다. 이러한 장치의 예들이 미국공개특허공보 제2011/0216304호, 제2012/0170029호, 제2014/0293263호, 미국등록특허공보 제8836922호에 기재되어 있다. 그런데 이와 같이 장치 전체를 회전시킬 경우 라이다 장치의 전체 크기가 매우 커지기 때문에, 장치의 가격 및 소비전력 상승의 문제를 가지게 된다.In particular, in the case of a lidar device having a panoramic scanning function, the entire device including the transmission optical system and the reception optical system rotates and operates. Examples of such devices are described in US Patent Publication Nos. 2011/0216304, 2012/0170029, 2014/0293263, and US Patent Publication No. 8836922. However, when the entire device is rotated in this way, since the overall size of the lidar device becomes very large, there is a problem of an increase in the price of the device and power consumption.
본 발명은 상기와 같은 문제점을 해결하기 위해 안출된 것으로서, 라이다 장치의 외부에 위치한 외부 반사체에 대하여 레이저 빔을 스캐닝 방식으로 방출하고, 상기 외부 반사체에 의해 반사되어 귀환하는 수신광을 획득하여 반사체까지의 거리를 계산함으로써, 소요되는 레이저 출력이 매우 낮고, 장치 전체의 크기를 감소시킬 수 있으며, 제작비 및 운용비가 저렴한 라이다 장치를 제공하는 것에 그 목적이 있다.The present invention has been devised to solve the above problems, by emitting a laser beam in a scanning manner to an external reflector located outside the lidar device, and acquiring the received light reflected by the external reflector and returning the reflector An object of the present invention is to provide a lidar device having a very low laser power required, reducing the overall size of the device, and having low manufacturing and operating costs by calculating the distance to the .
또한, 본 발명은 상기 외부 반사체에 의해 반사되어 귀환하는 수신광을 광 검출부 방향으로 가이딩함으로써, 광 검출부가 상기 수신광을 수신하는 효율을 증가시켜 보다 정확한 거리 측정이 가능한 라이다 장치를 제공하는 것에 그 목적이 있다.In addition, the present invention provides a lidar device capable of more accurate distance measurement by guiding the received light reflected by the external reflector and returned in the direction of the light detecting unit, thereby increasing the efficiency at which the light detecting unit receives the received light. that has its purpose
상기와 같은 목적을 달성하기 위하여, 본 발명의 일 실시예에 따른 라이다 장치는, 소스광을 발생하는 광원; 상기 소스광의 광경로 상에 회전가능하게 배치되어 그 반사면의 방향이 시간적으로 가변되며, 상기 소스광을 시간적으로 방향을 달리하여 스캔광으로서 상방으로 반사시키는 회전거울; 상기 회전거울의 상부에 배치되어, 상기 스캔광이 라이다 장치의 전방으로 출사되는 각도를 확장시키고, 상기 스캔광이 외부 반사체에 의해 반사되어 귀환하는 수신광을 하방으로 굴절시키는 렌즈부; 상기 회전거울의 앞에 배치되고, 상기 렌즈부에 의해 굴절되는 수신광을 반사시키며, 상기 회전거울에서 출사되는 상기 스캔광의 광경로가 차단되지 않도록 상기 회전거울과 대향하는 위치에 스캔광 투과부가 형성되어 있는 수신거울; 상기 수신거울에 의해 반사되는 수신광을 가이딩하는 광 가이드부; 및 상기 광 가이드부에 의해 가이딩되는 수신광을 검출하는 광 검출부를 포함하여 이루어질 수 있다.In order to achieve the above object, a lidar device according to an embodiment of the present invention, a light source for generating a source light; a rotating mirror rotatably disposed on the optical path of the source light, the direction of the reflective surface is temporally variable, and the direction of the source light is changed temporally to reflect upwardly as scan light; a lens unit disposed on the rotating mirror to extend the angle at which the scan light is emitted to the front of the lidar device and downwardly refract the received light that is reflected by the external reflector and returned to the scan light; It is disposed in front of the rotating mirror, reflects the received light refracted by the lens unit, and a scan light transmitting unit is formed at a position opposite to the rotating mirror so that the optical path of the scan light emitted from the rotating mirror is not blocked. receiving mirror; a light guide unit for guiding the received light reflected by the receiving mirror; and a light detection unit configured to detect the received light guided by the light guide unit.
여기서, 본 발명의 일 실시예에 따른 라이다 장치는, 상기 수신거울에 의해 반사되는 수신광을 집광하는 제1 집광렌즈를 더 포함할 수 있으며, 이에 따라 상기 광 가이드부는 상기 제1 집광렌즈에 의해 집광된 수신광을 가이딩할 수 있다.Here, the lidar device according to an embodiment of the present invention may further include a first condensing lens for condensing the received light reflected by the receiving mirror, and accordingly, the light guide unit is attached to the first condensing lens. It is possible to guide the received light collected by the
또한, 본 발명의 일 실시예에 따른 라이다 장치는, 상기 제1 집광렌즈에 의해 집광된 수신광을 상기 광 가이드부 방향으로 반사시키는 반사거울을 더 포함할 수 있다.In addition, the lidar device according to an embodiment of the present invention may further include a reflective mirror for reflecting the received light collected by the first condensing lens in the direction of the light guide unit.
그리고 상기 광원에서 발생되는 소스광은 상기 수신거울에 의해 반사되어 상기 회전거울로 입사될 수 있다.In addition, the source light generated from the light source may be reflected by the receiving mirror to be incident on the rotating mirror.
그리고 상기 광 가이드부는 상기 수신거울에 의해 반사되는 수신광이 입사되는 입사부와, 상기 광 가이드부에 입사된 수신광이 출사되는 출사부를 구비하며, 내부가 중공인 것일 수 있다.The light guide unit may include an incident unit to which the received light reflected by the receiving mirror is incident, and an exit unit through which the received light incident to the light guide unit is emitted, and may have a hollow interior.
여기서, 상기 광 가이드부는 상기 입사부에서 상기 출사부로 갈수록 단면적이 점점 작아지는 것일 수 있다.Here, the light guide part may have a cross-sectional area that gradually decreases from the incident part to the output part.
또한, 본 발명의 일 실시예에 따른 라이다 장치는, 상기 광 가이드부에 의해 가이딩되는 수신광을 집광하는 제2 집광렌즈를 더 포함할 수 있으며, 이에 따라 상기 광 검출부는 상기 제2 집광렌즈에 의해 집광된 수신광을 검출하는 것일 수 있다.In addition, the lidar device according to an embodiment of the present invention may further include a second condensing lens for condensing the received light guided by the light guide unit, and accordingly, the light detecting unit may further include the second condensing unit. It may be to detect the received light condensed by the lens.
그리고 상기 렌즈부는 적어도 둘 이상의 광각렌즈가 상하방향으로 일렬로 배치되어 있는 것일 수 있다.In addition, at least two or more wide-angle lenses may be arranged in a line in the vertical direction of the lens unit.
또한, 본 발명의 일 실시예에 따른 라이다 장치는, 상기 렌즈부에 인접하게 배치되고, 이에 입사되는 상기 스캔광을 라이다 장치의 후방으로 출사시키도록 만곡되어 있는 후방반사거울을 더 포함할 수 있다.In addition, the lidar device according to an embodiment of the present invention, disposed adjacent to the lens unit, and further comprising a rear reflection mirror curved to emit the scan light incident thereto to the rear of the lidar device can
한편, 상기와 같은 목적을 달성하기 위하여, 본 발명의 다른 실시예에 따른 라이다 장치는, 소스광을 발생하는 광원; 상기 소스광의 광경로 상에 회전가능하게 배치되어 그 반사면의 방향이 시간적으로 가변되며, 상기 소스광을 시간적으로 방향을 달리하여 스캔광으로서 상방으로 반사시키는 회전거울; 상기 회전거울의 상부에 배치되어, 상기 스캔광이 라이다 장치의 전방으로 출사되는 각도를 확장시키고, 상기 스캔광이 외부 반사체에 의해 반사되어 귀환하는 수신광을 하방으로 굴절시키는 렌즈부; 상기 렌즈부에 의해 굴절되는 수신광을 가이딩하는 광 가이드부; 및 상기 광 가이드부에 의해 가이딩되는 수신광을 검출하는 광 검출부를 포함하여 이루어질 수 있다.On the other hand, in order to achieve the above object, a lidar device according to another embodiment of the present invention, a light source for generating a source light; a rotating mirror rotatably disposed on the optical path of the source light, the direction of the reflective surface is temporally variable, and the direction of the source light is changed temporally to reflect upwardly as scan light; a lens unit disposed on the rotating mirror to extend the angle at which the scan light is emitted to the front of the lidar device and downwardly refract the received light that is reflected by the external reflector and returned to the scan light; a light guide unit for guiding the received light refracted by the lens unit; and a light detection unit configured to detect the received light guided by the light guide unit.
여기서, 상기 회전거울, 상기 렌즈부, 상기 광 가이드부 및 상기 광 검출부는 일직선 상에 배치될 수 있다.Here, the rotating mirror, the lens unit, the light guide unit, and the light detection unit may be disposed on a straight line.
그리고 상기 광 가이드부는 상기 수신거울에 의해 반사되는 수신광이 입사되는 입사부와, 상기 광 가이드부에 입사된 수신광이 출사되는 출사부를 구비하며, 내부가 중공인 것일 수 있다.The light guide unit may include an incident unit to which the received light reflected by the receiving mirror is incident, and an exit unit through which the received light incident to the light guide unit is emitted, and may have a hollow interior.
여기서, 상기 광 가이드부는 상기 입사부에서 상기 출사부로 갈수록 단면적이 점점 작아지는 것일 수 있다.Here, the light guide part may have a cross-sectional area that gradually decreases from the incident part to the output part.
여기서, 본 발명의 다른 실시예에 따른 라이다 장치는 상기 광 가이드부의 상측에 맞닿아 연결되며, 내부가 중공인 서브 광 가이드부를 더 포함할 수 있다.Here, the lidar device according to another embodiment of the present invention is connected to the upper side of the light guide unit, and may further include a hollow sub light guide unit.
여기서, 상기 서브 광 가이드부는 하측에서 상측으로 갈수록 단면적이 점점 작아지는 것일 수 있다.Here, the sub light guide portion may have a cross-sectional area that gradually decreases from the lower side to the upper side.
또한, 본 발명의 다른 실시예에 따른 라이다 장치는, 상기 광 가이드부에 의해 가이딩되는 수신광을 집광하는 집광렌즈를 더 포함할 수 있으며, 상기 광 검출부는 상기 집광렌즈에 의해 집광된 수신광을 검출하는 것일 수 있다.In addition, the lidar device according to another embodiment of the present invention may further include a condensing lens for condensing the received light guided by the light guide unit, the light detection unit is the number of condensed by the condensing lens It may be to detect a new light.
그리고 상기 렌즈부는 적어도 둘 이상의 광각렌즈가 상하방향으로 일렬로 배치되어 있는 것일 수 있다.In addition, at least two or more wide-angle lenses may be arranged in a line in the vertical direction of the lens unit.
그리고 상기 광원은 상기 광 가이드부의 일측에 배치되고, 상기 회전거울은 상기 광 가이드부의 내부에 배치되며, 상기 광 가이드부에는 상기 광원에서 발생되는 소스광의 광경로가 차단되지 않도록 상기 소스광의 광경로 상에 소스광 투과부가 형성되어 있을 수 있다.And the light source is disposed on one side of the light guide part, the rotating mirror is disposed inside the light guide part, the light guide part on the optical path of the source light so as not to block the optical path of the source light generated by the light source A source light transmitting portion may be formed on the .
또는, 상기 광원은 상기 광 가이드부의 일측에 배치되고, 상기 회전거울은 상기 광 가이드부의 일측과 대향하는 위치에 배치되며, 상기 광 가이드부에는 상기 스캔광의 광경로가 차단되지 않도록 상기 스캔광의 광경로 상에 스캔광 투과부가 형성되어 있을 수 있다. Alternatively, the light source is disposed on one side of the light guide part, the rotating mirror is disposed at a position opposite to one side of the light guide part, and the optical path of the scan light is not blocked in the light guide part A scan light transmitting part may be formed thereon.
여기서, 상기 광원에서 발생되는 소스광은 상기 광 가이드부에 의해 반사되어 상기 회전거울에 입사되는 것일 수 있다.Here, the source light generated from the light source may be reflected by the light guide unit to be incident on the rotating mirror.
또한, 본 발명의 다른 실시예에 따른 라이다 장치는, 상기 렌즈부에 인접하게 배치되고, 이에 입사되는 상기 스캔광을 라이다 장치의 후방으로 출사시키도록 만곡되어 있는 후방반사거울을 더 포함할 수 있다.In addition, the lidar device according to another embodiment of the present invention, disposed adjacent to the lens unit, and further comprising a rear reflection mirror curved to emit the scan light incident thereto to the rear of the lidar device can
본 발명에 의하면, 광원에서 발생되는 소스광을 회전거울에 의해 스캐닝 방식으로 라이다 장치 외부로 방출시키기 때문에, 화각 내의 모든 방향으로 소스광을 동시에 방출하는 종래 라이다 장치에 비해 소요되는 레이저 출력이 매우 낮고, 장치 전체의 크기를 감소시킬 수 있으며, 제작비 및 운용비가 저렴해질 수 있다.According to the present invention, since the source light generated from the light source is emitted to the outside of the LIDAR device in a scanning manner by the rotating mirror, the laser output required is lower than that of the conventional LIDAR device that simultaneously emits the source light in all directions within the angle of view. It is very low, the overall size of the device can be reduced, and the manufacturing cost and operating cost can be reduced.
또한, 본 발명에 의하면, 외부 반사체에 의해 반사되어 귀환하는 수신광을 광 가이드부에 의해 광 검출부 방향으로 가이딩함으로써, 광 검출부가 상기 수신광의 수신 효율을 증가시켜 보다 정확한 거리 측정이 가능해질 수 있다.In addition, according to the present invention, by guiding the received light reflected by the external reflector and returned in the direction of the light detecting unit by the light guide unit, the light detecting unit increases the reception efficiency of the received light, so that more accurate distance measurement is possible. can
도 1은 본 발명의 제1 실시예에 따른 라이다 장치를 나타낸 도면이다.
도 2는 본 발명의 제2 실시예에 따른 라이다 장치를 나타낸 도면이다.
도 3은 본 발명의 제3 실시예에 따른 라이다 장치를 나타낸 도면이다.
도 4는 본 발명의 제4 실시예에 따른 라이다 장치를 나타낸 도면이다.
도 5는 본 발명의 제5 실시예에 따른 라이다 장치를 나타낸 도면이다.
도 6은 본 발명의 제6 실시예에 따른 라이다 장치를 나타낸 도면이다.
도 7은 본 발명의 제7 실시예에 따른 라이다 장치를 나타낸 도면이다.1 is a view showing a lidar device according to a first embodiment of the present invention.
2 is a view showing a lidar device according to a second embodiment of the present invention.
3 is a view showing a lidar device according to a third embodiment of the present invention.
4 is a view showing a lidar device according to a fourth embodiment of the present invention.
5 is a view showing a lidar device according to a fifth embodiment of the present invention.
6 is a view showing a lidar device according to a sixth embodiment of the present invention.
7 is a view showing a lidar device according to a seventh embodiment of the present invention.
이하, 첨부한 도면들을 참조하여 본 발명에 따른 라이다 장치의 다양한 실시예들에 대해 상세하게 설명한다. 첨부한 도면들은 통상의 기술자에게 본 발명의 사상이 충분히 전달될 수 있도록 하기 위해 제공되는 것으로서, 본 발명은 첨부한 도면들만으로 한정되는 것이 아니라 본 발명의 기술적 사상을 변화시키지 않는 범위 내에서 다른 형태로 구체화될 수 있다.Hereinafter, various embodiments of the lidar device according to the present invention will be described in detail with reference to the accompanying drawings. The accompanying drawings are provided so that the spirit of the present invention can be sufficiently conveyed to those skilled in the art, and the present invention is not limited to the accompanying drawings, but may be modified in other forms within the scope that does not change the technical spirit of the present invention. can be materialized.
도면들 중 동일한 부호는 동일한 구성요소를 나타내며, 본 발명의 요지를 불필요하게 흐릴 수 있는 공지 기능 및 구성에 대해서는 그 상세한 설명을 생략하기로 한다.In the drawings, the same reference numerals indicate the same components, and detailed descriptions of well-known functions and configurations that may unnecessarily obscure the gist of the present invention will be omitted.
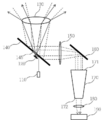
도 1은 본 발명의 제1 실시예에 따른 라이다 장치를 나타낸 도면이고, 도 2는 본 발명의 제2 실시예에 따른 라이다 장치를 나타낸 도면이다.1 is a diagram illustrating a lidar device according to a first embodiment of the present invention, and FIG. 2 is a diagram illustrating a lidar device according to a second embodiment of the present invention.
도 1 및 도 2를 참조하면, 본 발명의 제1 실시예에 따른 라이다 장치는 광원(110), 회전거울(120), 렌즈부(130), 수신거울(140), 광 가이드부(170) 및 광 검출부(190)를 포함하여 이루어질 수 있다.1 and 2 , the lidar device according to the first embodiment of the present invention includes a
광원(110)은 라이다 장치의 외부에 위치하고 있는 대상물(이하, '외부 반사체'라 함)을 스캐닝하기 위한 소스 레이저 광(이하, '소스광'이라 함)을 발생시킨다. 상기 소스광은 펄스 레이저인 것이 바람직하다. 광원(110)에서 발생되는 소스광은 회전거울(120)에 입사한다.The
회전거울(120)은 광원(110)에서 발생되는 소스광을 재반사시켜, 상기 재반사된 소스광(이하, '스캔광'이라 함)을 렌즈부(130) 방향으로 진행시킨다. 회전거울(120)은 소스광의 광경로 상에 2축 방향으로 회전가능하게 배치되어 그 반사면의 방향이 시간적으로 가변되며, 상기 소스광을 시간적으로 방향을 달리하여 스캔광으로서 상방으로 반사시킨다. 예를 들어, 회전거울(120)은 그 전면을 기준으로 좌우방향 및 상하방향으로 회전할 수 있으며, 상방에서 하방으로 1회 회전하는 동안에 좌우방향으로 다수 회전하는 것일 수 있다. 이와 같은 회전거울(120)에 의해 소스광은 라이다 장치의 전방을 향해 주기적으로 스캐닝될 수 있다.The
회전거울(120)은 MEMS 반도체 상에 미러가 배치된 MEMS 미러일 수 있다. MEMS 미러는 한국등록특허공보 제10-0682955호의 도면에 자세히 표시되어 있고, 통상의 기술자가 본 명세서를 토대로 용이하게 구현할 수 있는 것이므로, 이에 대한 자세한 설명은 생략한다.The
렌즈부(130)는 회전거울(120)의 상부에 배치되어, 회전거울(120)로부터 출사되는 스캔광이 라이다 장치의 전방으로 출사되는 각도를 확장시킨다. 또한, 렌즈부(130)는 외부로 반사된 상기 스캔광이 외부 반사체에 의해 반사되어 귀환하는 수신광을 하방으로 굴절시킨다.The
렌즈부(130)는 하나의 광각렌즈로 이루어지거나, 적어도 둘 이상의 광각렌즈가 상하방향으로 일렬로 배치되어 이루어질 수 있다. The
수신거울(140)은 회전거울(120)의 앞에 배치되고, 렌즈부(130)에 의해 굴절되는 수신광을 반사시키며, 회전거울(120)에서 출사되는 스캔광의 광경로가 차단되지 않도록 회전거울(120)과 대향하는 위치에 스캔광 투과부(145)가 형성되어 있다. The
스캔광 투과부(145)는 수신거울(140)의 대략 중앙의 위치에 형성된 관통공일 수 있다. 또는, 스캔광 투과부(145)는 수신거울(140)의 대략 중앙의 위치에 거울코팅을 제거하여 광이 투과될 수 있도록 형성된 부분일 수 있다.The scan
한편, 광원(110)에서 발생되는 소스광은 수신거울(140)에 의해 반사되어 회전거울(120)에 입사될 수 있는데, 이를 위해 상기 소스광이 수신거울(140)에 입사되는 부분에는 미러 코팅이 수행될 수 있다. 이와 같이 구성함에 따라, 라이다 장치 전체의 크기는 소형화가 가능해지게 된다.On the other hand, the source light generated from the
수신거울(140)에 의해 반사되는 수신광은 제1 집광렌즈(150)에 의해 집광되어, 광 검출부(190)가 수신광을 보다 높은 효율로 검출할 수 있도록 하는 것이 바람직하다.It is preferable that the received light reflected by the receiving
그리고 상기 제1 집광렌즈(150)에 의해 집광된 수신광은 반사거울(160)에 의해 광 가이드부(170) 방향으로 반사될 수 있다. In addition, the received light collected by the
여기서, 반사거울(160)은 광 가이드부(170)의 위치를 고려하여 배치될 필요가 있다. 즉, 도 2에 나타낸 바와 같이, 광 가이드부(170)가 수신거울(140)에 의해 반사된 직후의 수신광의 광경로와 동일 선상에 위치할 경우에는 반사거울(160)이 반드시 구비될 필요는 없으며, 이 경우 도 2에 나타낸 라이다 장치는 도 1에 나타낸 라이다 장치에 비해 반사거울(160)의 생략으로 인해 라이다 장치 전체의 크기를 줄일 수 있고 제조 가격 역시 줄일 수 있게 된다.Here, the
광 가이드부(170)는 수신거울(140)에 의해 반사되는 수신광을 가이딩하고, 상기 광 가이드부(170)에 의해 가이딩되는 수신광은 광 검출부(190)에서 검출이 이루어지게 된다. The
이 때, 광 가이드부(170)와 광 검출부(190) 사이에는 제2 집광렌즈(180)가 배치될 수 있다. 제2 집광렌즈(180)는 상기 광 가이드부(170)에 의해 가이딩되는 수신광을 집광하고, 이에 따라 광 검출부(190)는 상기 제2 집광렌즈(180)에 의해 집광된 수신광을 검출한다. 제2 집광렌즈(180)는 상기 제1 집광렌즈(150)와 마찬가지로 수신거울(140)에 의해 반사되는 수신광을 집광하여 광 검출부(190)로 하여금 수신광을 보다 높은 효율로 검출할 수 있도록 도와준다.In this case, the
광 가이드부(170)는 수신거울(140)에 의해 반사되는 수신광이 입사되는 입사부(171)와, 상기 입사부(171)에 입사된 수신광이 출사되는 출사부(172)를 구비하며 그 내부는 중공으로 이루어져 있다. 광 가이드부(170)는 유리 재질로 이루어질 수 있으나, 유리 재질이 아닌 재질로 이루어진 경우에는 그 내부에 미러 코팅이 된 것일 수 있다. The
광 가이드부(170)의 입사부(171)에 입사된 수신광은 그 내부면에서 반사된 후 출사부(172)로 빠져 나오게 된다. 한편, 광 검출부(190)에서 수신광을 높은 효율로 수신하기 위하여, 광 가이드부(170)는 입사부(171)에서 출사부(172)로 갈수록 단면적이 점점 작아지는 형상인 것이 바람직하다. 이는 광 가이드부(170)의 입사부(171)에서는 수신거울(140)에 의해 반사되는 수신광이 최대한 많이 입사되도록 하고, 광 가이드부(170)의 출사부(172)에서는 이로부터 출사되는 수신광의 발산을 최소화하여 최대한 많은 양의 수신광을 광 검출부(190)에 입사시키기 위함이다.The received light incident on the
광 검출부(190)는 광 가이드부(170)에 의해 가이딩되는 수신광을 검출한다. 광 검출부(190)로는 하나 이상의 애벌랜치 포토 다이오드(APD) 어레이가 사용될 수 있다.The
도 3은 본 발명의 제3 실시예에 따른 라이다 장치를 나타낸 도면이고, 도 4는 본 발명의 제4 실시예에 따른 라이다 장치를 나타낸 도면이며, 도 5는 본 발명의 제5 실시예에 따른 라이다 장치를 나타낸 도면이다.3 is a diagram showing a lidar device according to a third embodiment of the present invention, FIG. 4 is a diagram showing a lidar device according to a fourth embodiment of the present invention, and FIG. 5 is a fifth embodiment of the present invention It is a view showing the lidar device according to the.
도 3 내지 도 5에 나타낸 실시예들은 도 1 및 도 2에 나타낸 실시예들과는 달리 수신거울을 구비하고 있지 않다는 점에서 차이가 있다.The embodiments shown in FIGS. 3 to 5 are different from the embodiments shown in FIGS. 1 and 2 in that they do not include a receiving mirror.
먼저, 도 3을 참조하면, 본 발명의 제3 실시예에 따른 라이다 장치는 광원(510), 회전거울(520), 렌즈부(530), 광 가이드부(570) 및 광 검출부(590)를 포함하여 이루어질 수 있다.First, referring to FIG. 3 , the lidar device according to the third embodiment of the present invention includes a
광원(510)은 외부 반사체를 스캐닝하기 위한 소스광을 발생시키며, 상기 소스광은 펄스 레이저인 것이 바람직하다. 한편, 광원(510)에서 발생되는 소스광은 회전거울(520)에 입사한다.The
회전거울(520)은 광원(510)에서 발생되는 소스광을 재반사시킨 스캔광을 렌즈부(530) 방향으로 진행시킨다. 회전거울(520)은 소스광의 광경로 상에 2축 방향으로 회전가능하게 배치되어 그 반사면의 방향이 시간적으로 가변되며, 상기 소스광을 시간적으로 방향을 달리하여 스캔광으로서 상방으로 반사시킨다. 예를 들어, 회전거울(520)은 그 전면을 기준으로 좌우방향 및 상하방향으로 회전할 수 있으며, 상방에서 하방으로 1회 회전하는 동안에 좌우방향으로 다수 회전하는 것일 수 있다. 이와 같은 회전거울(120)에 의해 소스광은 라이다 장치의 전방을 향해 주기적으로 스캐닝될 수 있다.The
회전거울(520)은 앞서 설명한 바와 같이 MEMS 반도체 상에 미러가 배치된 MEMS 미러일 수 있다. The
렌즈부(530)는 회전거울(520)의 상부에 배치되어, 회전거울(520)로부터 반사되는 스캔광이 라이다 장치의 전방으로 출사되는 각도를 확장시킨다. 또한, 렌즈부(530)는 외부로 반사된 상기 스캔광이 외부 반사체에 의해 반사되어 귀환하는 수신광을 하방으로 굴절시킨다.The
렌즈부(530)는 하나의 광각렌즈로 이루어지거나, 적어도 둘 이상의 광각렌즈가 상하방향으로 일렬로 배치되어 이루어질 수 있다. The
렌즈부(530)에 의해 굴절되는 수신광은 렌즈부(530)의 하부에 배치되는 광 가이드부(570)에 입사된다.The received light refracted by the
광 가이드부(570)는 렌즈부(530)에 의해 굴절되는 수신광을 가이딩하고, 상기 광 가이드부(570)에 의해 가이딩되는 수신광은 광 검출부(590)에서 검출이 이루어지게 된다.The
이 때, 광 가이드부(570)와 광 검출부(590) 사이에는 집광렌즈(580)가 배치될 수 있다. 집광렌즈(580)는 상기 광 가이드부(570)에 의해 가이딩되는 수신광을 집광하고, 이에 따라 광 검출부(590)는 상기 집광렌즈(580)에 의해 집광된 수신광을 검출한다. 집광렌즈(580)는 렌즈부(530)에 의해 반사되는 수신광을 집광하여 광 검출부(590)로 하여금 수신광을 보다 높은 효율로 검출할 수 있도록 도와준다.In this case, a condensing
광 가이드부(570)는 렌즈부(530)에 의해 반사되는 수신광이 입사되는 입사부(571)와, 상기 입사부(571)에 입사된 수신광이 출사되는 출사부(572)를 구비하며 그 내부는 중공으로 이루어져 있다. 광 가이드부(570)는 유리 재질로 이루어질 수 있으나, 유리 재질이 아닌 재질로 이루어진 경우에는 그 내부에 미러 코팅이 된 것일 수 있다. The
광 가이드부(570)의 입사부(571)에 입사된 수신광은 그 내부면에서 반사된 후 출사부(572)로 빠져 나오게 된다. 광 검출부(590)에서 수신광을 높은 효율로 수신하기 위하여, 광 가이드부(570)는 입사부(571)에서 출사부(572)로 갈수록 단면적이 점점 작아지는 형상인 것이 바람직하다. 이는 광 가이드부(570)의 입사부(571)에서는 렌즈부(530)에 의해 굴절되는 수신광이 최대한 많이 입사되도록 하고, 광 가이드부(570)의 출사부(572)에서는 이로부터 출사되는 수신광의 발산을 최소화하여 최대한 많은 양의 수신광을 광 검출부(590)에 입사시키기 위함이다.The received light incident on the
광 검출부(590)는 광 가이드부(570)에 의해 가이딩되는 수신광을 검출한다. 광 검출부(590)로는 하나 이상의 애벌런치 포토 다이오드(APD) 어레이가 사용될 수 있다.The
도 3에 나타낸 바와 같이, 본 발명에 따른 라이다 장치는 회전거울(520)에서 반사되는 스캔광이 스캔 방식으로 방출되어 렌즈부(530)로 입사되는 한편, 상기 렌즈부(530)에서는 외부 반사체에 의해 반사되어 귀환하는 수신광을 하방으로 굴절시키기 때문에, 회전거울(520), 렌즈부(530), 광 가이드부(570) 및 광 검출부(590)를 일직선 상에 배치시킬 수 있다. 이와 같이 구성할 경우 라이다 장치 전체의 크기를 소형화하는 것이 가능해진다.As shown in FIG. 3 , in the lidar device according to the present invention, the scan light reflected from the
도 4를 참조하면, 도 4에 나타낸 라이다 장치는 도 3에 나타낸 라이다 장치와 비교하여 광 가이드부(570)의 상측에 서브 광 가이드부(600)를 더 포함한다는 점에서만 차이가 있다.Referring to FIG. 4 , the lidar device shown in FIG. 4 is different from the lidar device shown in FIG. 3 only in that it further includes a sub
앞서 설명한 바와 같이, 렌즈부(530)는 외부 반사체에 의해 반사되어 귀환하는 수신광을 하방으로 굴절시킨다. 이 때, 렌즈부(530)의 표면 상태에 따라 렌즈부(530)에서 굴절되는 수신광은 예상 광경로와는 다른 광경로를 갖고 하방으로 굴절될 수 있다. 이에 따라, 광 가이드부(570)의 상측에 서브 광 가이드부(600)를 구비함으로써 예상 광경로와는 다른 광경로를 갖고 하방으로 굴절되는 수신광을 광 검출부(590) 방향으로 가이딩하는 것이 바람직하다.As described above, the
서브 광 가이드부(600)는 광 가이드부(570)의 상측에 맞닿아 연결된다. 서브 광 가이드부(600) 역시 광 가이드부(570)와 마찬가지로 유리 재질로 이루어질 수 있으나, 유리 재질이 아닌 재질로 이루어진 경우에는 그 내부에 미러 코팅이 된 것일 수 있다. The sub
또한, 서브 광 가이드부(600)는 이에 입사되는 광을 광 가이드부(570)로 반사시키기 위해, 서브 광 가이드부(600)의 하측에서 상측으로 갈수록 단면적이 점점 작아지도록 구성되는 것이 바람직하다. 이와 같이, 서브 광 가이드부(600)를 광 가이드부(570)의 상측에 구비함으로써 렌즈부(530)에서 굴절되는 수신광의 집속 효율은 증가할 수 있게 된다.In addition, in order to reflect the light incident thereto to the
도 5에 나타낸 라이다 장치는 도 4에 나타낸 라이다 장치와 비교하여 광원(510) 및 회전거울(520)의 위치에 차이가 있다.The lidar device shown in FIG. 5 is different from the lidar device shown in FIG. 4 in the positions of the
도 5를 참조하면, 광원(510)은 광 가이드부(570)의 일측에 배치되어 있고, 회전거울(520)은 광 가이드부(570)의 내부에 배치되어 있다. 이 경우 광원(510)에서 발생되는 소스광의 광경로는 광 가이드부(570)에 의해 차단될 수 있다. 이에 따라, 광 가이드부(570)에는 광원(510)에서 발생되는 소스광의 광경로가 차단되지 않도록 소스광의 광경로 상에 소스광 투과부(575)가 형성되어 있는 것이 바람직하다. 여기서, 상기 소스광 투과부(575)는 소스광의 광경로 상에 형성된 관통공일 수 있다.Referring to FIG. 5 , the
도 6에 나타낸 라이다 장치는 도 4에 나타낸 라이다 장치와 비교하여 광 가이드부(570)의 형상, 그리고 광원(510) 및 회전거울(520)의 위치에 차이가 있다.The lidar device shown in FIG. 6 is different from the lidar device shown in FIG. 4 in the shape of the
도 6을 참조하면, 광 가이드부(570)는 좌우가 비대칭 형상을 갖는다. 그리고 광원(510)은 광 가이드부(570)의 일측에 배치되어 있고, 회전거울(520)은 광 가이드부(570)의 상기 일측과 대향하는 위치에 배치되어 있다. Referring to FIG. 6 , the
이때, 회전거울(520)에서 출사되는 스캔광의 광경로는 광 가이드부(570)에 의해 차단될 수 있다. 따라서, 광 가이드부(570)에는 회전거울(520)에서 출사되는 스캔광의 광경로가 차단되지 않도록 스캔광의 광경로 상에 스캔광 투과부(578)가 형성되어 있는 것이 바람직하다. 여기서, 상기 스캔광 투과부(578)는 스캔광의 광경로 상에 형성된 관통공일 수 있다.In this case, the optical path of the scan light emitted from the
그리고 이 경우 광원(510)에서 발생되는 소스광은 광 가이드부(570)에 의해 반사되어 회전거울(520)에 입사될 수 있는데, 이를 위해 상기 소스광이 광 가이드부(570)에 입사되는 부분에는 미러 코팅이 수행될 수 있다. 이와 같이 구성함에 따라, 라이다 장치 전체의 크기는 소형화가 가능해지게 된다.And in this case, the source light generated from the
도 7은 본 발명의 제7 실시예에 따른 라이다 장치를 나타낸 도면이다.7 is a view showing a lidar device according to a seventh embodiment of the present invention.
도 7에 나타낸 라이다 장치는 도 1에 나타낸 라이다 장치와 비교하여 렌즈부(130)의 구성이 상이하고, 렌즈부(130)와 인접하여 후방반사거울(200)이 추가로 배치되어 있다는 점에서 차이가 있다.The lidar device shown in FIG. 7 has a different configuration of the
렌즈부(130)는 도 1에 나타낸 바와 같이 하나의 광각렌즈로 이루어질 수 있다. 또는, 렌즈부(130)는 도 7에 나타낸 바와 같이 적어도 둘 이상의 광각렌즈가 상하방향으로 일렬로 배치되어 이루어질 수 있다. 렌즈부(130)가 하나의 광각렌즈만으로 이루어질 경우에 비해 적어도 둘 이상의 광각렌즈가 상하방향으로 일렬로 배치되어 이루어질 경우에는 회전거울(120)로부터 출사되는 스캔광이 라이다 장치의 전방으로 출사되는 각도가 확장되어 외부 반사체를 감지할 수 있는 범위가 더욱 확대될 수 있다. The
후방반사거울(200)은 렌즈부(130)와 인접하게 배치되어, 이에 입사되는 스캔광을 라이다 장치의 후방으로 출사시키도록 만곡되어 있다. 이와 같은 후방반사거울(200)을 구비함에 따라, 회전거울(120)로부터 출사되는 스캔광이 라이다 장치의 전방뿐 아니라 후방으로도 출사되기 때문에, 외부 반사체를 감지할 수 있는 범위가 더욱 확대될 수 있다.The
비록 도 7은 도 1에 나타낸 라이다 장치의 변형예를 나타낸 것이나, 도 7에 나타낸 렌즈부(130)의 구성 및 렌즈부(130)와 인접하게 배치되는 후방반사거울(200)은 도 2 내지 도 6에 나타낸 본 발명의 다른 실시예에도 마찬가지로 적용될 수 있음은 물론이다.Although FIG. 7 shows a modified example of the lidar device shown in FIG. 1, the configuration of the
또한, 본 발명은 비록 한정된 실시예와 도면에 의해 설명되었으나, 본 발명은 상기의 실시예에 한정되는 것은 아니며, 이는 본 발명이 속하는 분야에서 통상의 지식을 가진 자라면 이러한 기재로부터 다양한 수정 및 변형이 가능하다. 따라서, 본 발명의 기술적 사상은 특허청구범위에 의해서만 파악되어야 하고, 이의 균등 또는 등가적 변형 모두는 본 발명의 기술적 사상의 범주에 속한다고 할 것이다.In addition, although the present invention has been described with reference to the limited embodiments and drawings, the present invention is not limited to the above embodiments, which are various modifications and variations from these descriptions by those skilled in the art to which the present invention pertains. This is possible. Accordingly, the technical spirit of the present invention should be understood only by the claims, and all equivalents or equivalent modifications thereof will fall within the scope of the technical spirit of the present invention.
110, 510: 광원
120, 520: 회전거울
130, 530: 렌즈부
140: 수신거울
150: 제1 집광렌즈
160: 반사거울
170, 570: 광 가이드부
180: 제2 집광렌즈
190, 590: 광 검출부
200: 후방반사거울110, 510: light source
120, 520: rotating mirror
130, 530: lens unit
140: receiving mirror
150: first condensing lens
160: reflection mirror
170, 570: light guide unit
180: second condensing lens
190, 590: light detection unit
200: rear reflection mirror
Claims (22)
상기 소스광의 광경로 상에 회전가능하게 배치되어 그 반사면의 방향이 시간적으로 가변되며, 상기 소스광을 시간적으로 방향을 달리하여 스캔광으로서 상방으로 반사시키는 회전거울;
상기 회전거울의 상부에 배치되어, 상기 스캔광이 라이다 장치의 전방으로 출사되는 각도를 확장시키고, 상기 스캔광이 외부 반사체에 의해 반사되어 귀환하는 수신광을 하방으로 굴절시키는 렌즈부;
상기 회전거울의 앞에 배치되고, 상기 렌즈부에 의해 굴절되는 수신광을 반사시키며, 상기 회전거울에서 출사되는 상기 스캔광의 광경로가 차단되지 않도록 상기 회전거울과 대향하는 위치에 스캔광 투과부가 형성되어 있는 수신거울;
상기 수신거울에 의해 반사되는 수신광을 가이딩하는 광 가이드부;
상기 광 가이드부에 의해 가이딩되는 수신광을 검출하는 광 검출부; 및
상기 렌즈부에 인접하게 배치되고, 이에 입사되는 상기 스캔광을 라이다 장치의 후방으로 출사시키도록 만곡되어 있는 후방반사거울을 포함하는 라이다 장치.
a light source for generating a source light;
a rotating mirror rotatably disposed on the optical path of the source light, the direction of the reflective surface is temporally variable, and the direction of the source light is changed temporally to reflect upwardly as scan light;
a lens unit disposed on the rotating mirror to extend the angle at which the scan light is emitted to the front of the lidar device, and downwardly refracts the received light that is reflected by the external reflector and returned to the scan light;
It is disposed in front of the rotating mirror, reflects the received light refracted by the lens unit, and a scan light transmitting part is formed at a position opposite to the rotating mirror so that the optical path of the scan light emitted from the rotating mirror is not blocked. receiving mirror;
a light guide unit for guiding the received light reflected by the receiving mirror;
a light detection unit detecting the received light guided by the light guide unit; and
The lidar device including a rear-reflecting mirror disposed adjacent to the lens unit and curved to emit the scan light incident thereto to the rear of the lidar device.
상기 수신거울에 의해 반사되는 수신광을 집광하는 제1 집광렌즈를 더 포함하며,
상기 광 가이드부는 상기 제1 집광렌즈에 의해 집광된 수신광을 가이딩하는 것을 특징으로 하는 라이다 장치.
The method of claim 1,
Further comprising a first condensing lens for condensing the received light reflected by the receiving mirror,
The light guide unit LiDAR device, characterized in that for guiding the received light focused by the first condensing lens.
상기 제1 집광렌즈에 의해 집광된 수신광을 상기 광 가이드부 방향으로 반사시키는 반사거울을 더 포함하는 라이다 장치.
3. The method of claim 2,
The lidar device further comprising a reflective mirror for reflecting the received light focused by the first condensing lens toward the light guide unit.
상기 광원에서 발생되는 소스광은 상기 수신거울에 의해 반사되어 상기 회전거울로 입사되는 것을 특징으로 하는 라이다 장치.
According to claim 1,
The source light generated from the light source is reflected by the receiving mirror and is incident on the rotating mirror lidar device.
상기 광 가이드부는 상기 수신거울에 의해 반사되는 수신광이 입사되는 입사부와, 상기 광 가이드부에 입사된 수신광이 출사되는 출사부를 구비하며, 내부가 중공인 것을 특징으로 하는 라이다 장치.
According to claim 1,
The light guide unit includes an incident unit through which the received light reflected by the receiving mirror is incident, and an emitting unit through which the received light incident on the light guide unit is emitted, and the interior of the lidar device is hollow.
상기 광 가이드부는 상기 입사부에서 상기 출사부로 갈수록 단면적이 점점 작아지는 것을 특징으로 하는 라이다 장치.
6. The method of claim 5,
The light guide portion LiDAR device, characterized in that the cross-sectional area gradually decreases from the incident portion to the exit portion.
상기 광 가이드부에 의해 가이딩되는 수신광을 집광하는 제2 집광렌즈를 더 포함하며,
상기 광 검출부는 상기 제2 집광렌즈에 의해 집광된 수신광을 검출하는 것을 특징으로 하는 라이다 장치.
According to claim 1,
Further comprising a second condensing lens for condensing the received light guided by the light guide unit,
The light detection unit LiDAR device, characterized in that for detecting the received light condensed by the second condensing lens.
상기 렌즈부는 적어도 둘 이상의 광각렌즈가 상하방향으로 일렬로 배치되어 있는 것을 특징으로 하는 라이다 장치.
The method of claim 1,
The lens unit LiDAR device, characterized in that at least two or more wide-angle lenses are arranged in a line in the vertical direction.
상기 소스광의 광경로 상에 회전가능하게 배치되어 그 반사면의 방향이 시간적으로 가변되며, 상기 소스광을 시간적으로 방향을 달리하여 스캔광으로서 상방으로 반사시키는 회전거울;
상기 회전거울의 상부에 배치되어, 상기 스캔광이 라이다 장치의 전방으로 출사되는 각도를 확장시키고, 상기 스캔광이 외부 반사체에 의해 반사되어 귀환하는 수신광을 하방으로 굴절시키는 렌즈부;
상기 렌즈부에 의해 굴절되는 수신광을 가이딩하는 광 가이드부;
상기 광 가이드부에 의해 가이딩되는 수신광을 검출하는 광 검출부; 및
상기 렌즈부에 인접하게 배치되고, 이에 입사되는 상기 스캔광을 라이다 장치의 후방으로 출사시키도록 만곡되어 있는 후방반사거울을 포함하는 라이다 장치.
a light source for generating a source light;
a rotating mirror rotatably disposed on the optical path of the source light, the direction of the reflective surface is temporally variable, and the direction of the source light is changed temporally to reflect upwardly as scan light;
a lens unit disposed on the rotating mirror to extend the angle at which the scan light is emitted to the front of the lidar device, and downwardly refracts the received light that is reflected by the external reflector and returned to the scan light;
a light guide unit for guiding the received light refracted by the lens unit;
a light detection unit detecting the received light guided by the light guide unit; and
The lidar device including a rear-reflecting mirror disposed adjacent to the lens unit and curved to emit the scan light incident thereto to the rear of the lidar device.
상기 회전거울, 상기 렌즈부, 상기 광 가이드부 및 상기 광 검출부는 일직선 상에 배치되는 것을 특징으로 하는 라이다 장치.
11. The method of claim 10,
The rotating mirror, the lens unit, the light guide unit and the light detection unit LiDAR device, characterized in that disposed on a straight line.
상기 광 가이드부는 상기 수신광이 입사되는 입사부와, 상기 광 가이드부에 입사된 수신광이 출사되는 출사부를 구비하며, 내부가 중공인 것을 특징으로 하는 라이다 장치.
11. The method of claim 10,
The light guide unit includes an incident unit to which the received light is incident, and an output unit through which the received light incident to the light guide unit is emitted, and the interior of the lidar device is hollow.
상기 광 가이드부는 상기 입사부에서 상기 출사부로 갈수록 단면적이 점점 작아지는 것을 특징으로 하는 라이다 장치.
13. The method of claim 12,
The light guide portion LiDAR device, characterized in that the cross-sectional area gradually decreases from the incident portion to the exit portion.
상기 광 가이드부의 상측에 맞닿아 연결되며, 내부가 중공인 서브 광 가이드부를 더 포함하는 라이다 장치.
14. The method of claim 13,
The lidar device further comprising a sub-light guide part abutting on the upper side of the light guide part, and having a hollow inside.
상기 서브 광 가이드부는 하측에서 상측으로 갈수록 단면적이 점점 작아지는 것을 특징으로 하는 라이다 장치.
15. The method of claim 14,
The sub light guide portion LiDAR device, characterized in that the cross-sectional area gradually decreases from the lower side to the upper side.
상기 광 가이드부에 의해 가이딩되는 수신광을 집광하는 집광렌즈를 더 포함하며,
상기 광 검출부는 상기 집광렌즈에 의해 집광된 수신광을 검출하는 것을 특징으로 하는 라이다 장치.
11. The method of claim 10,
Further comprising a condensing lens for condensing the received light guided by the light guide unit,
The light detection unit LiDAR device, characterized in that for detecting the received light condensed by the condensing lens.
상기 렌즈부는 적어도 둘 이상의 광각렌즈가 상하방향으로 일렬로 배치되어 있는 것을 특징으로 하는 라이다 장치.
11. The method of claim 10,
The lens unit LiDAR device, characterized in that at least two or more wide-angle lenses are arranged in a line in the vertical direction.
상기 광원은 상기 광 가이드부의 일측에 배치되고, 상기 회전거울은 상기 광 가이드부의 내부에 배치되며, 상기 광 가이드부에는 상기 광원에서 발생되는 소스광의 광경로가 차단되지 않도록 상기 소스광의 광경로 상에 소스광 투과부가 형성되어 있는 것을 특징으로 하는 라이다 장치.
11. The method of claim 10,
The light source is disposed on one side of the light guide part, the rotating mirror is disposed inside the light guide part, and the light guide part is on the optical path of the source light so that the optical path of the source light generated from the light source is not blocked. A lidar device, characterized in that the source light transmitting portion is formed.
상기 광원은 상기 광 가이드부의 일측에 배치되고, 상기 회전거울은 상기 광 가이드부의 일측과 대향하는 위치에 배치되며, 상기 광 가이드부에는 상기 스캔광의 광경로가 차단되지 않도록 상기 스캔광의 광경로 상에 스캔광 투과부가 형성되어 있는 것을 특징으로 하는 라이다 장치.
11. The method of claim 10,
The light source is disposed on one side of the light guide part, the rotating mirror is disposed at a position opposite to one side of the light guide part, and the light guide part is on the optical path of the scan light so that the optical path of the scan light is not blocked. A lidar device, characterized in that the scan light transmitting portion is formed.
상기 광원에서 발생되는 소스광은 상기 광 가이드부에 의해 반사되어 상기 회전거울에 입사되는 것을 특징으로 하는 라이다 장치.
20. The method of claim 19,
The source light generated from the light source is reflected by the light guide unit, it characterized in that the lidar device is incident on the rotating mirror.
상기 소스광의 광경로 상에 회전가능하게 배치되어 그 반사면의 방향이 시간적으로 가변되며, 상기 소스광을 시간적으로 방향을 달리하여 스캔광으로서 상방으로 반사시키는 회전거울;
상기 회전거울의 상부에 배치되어, 상기 스캔광이 라이다 장치의 전방으로 출사되는 각도를 확장시키고, 상기 스캔광이 외부 반사체에 의해 반사되어 귀환하는 수신광을 하방으로 굴절시키는 렌즈부;
상기 렌즈부에 의해 굴절되는 수신광을 가이딩하는 광 가이드부; 및
상기 광 가이드부에 의해 가이딩되는 수신광을 검출하는 광 검출부를 포함하며,
상기 광원은 상기 광 가이드부의 일측에 배치되고, 상기 회전거울은 상기 광 가이드부의 내부에 배치되며, 상기 광 가이드부에는 상기 광원에서 발생되는 소스광의 광경로가 차단되지 않도록 상기 소스광의 광경로 상에 소스광 투과부가 형성되어 있는 것을 특징으로 하는 라이다 장치.a light source for generating a source light;
a rotating mirror rotatably disposed on the optical path of the source light, the direction of the reflective surface is temporally variable, and the direction of the source light is changed temporally to reflect upwardly as scan light;
a lens unit disposed on the rotating mirror to extend the angle at which the scan light is emitted to the front of the lidar device, and downwardly refracts the received light that is reflected by the external reflector and returned to the scan light;
a light guide unit for guiding the received light refracted by the lens unit; and
and a light detection unit for detecting the received light guided by the light guide unit,
The light source is disposed on one side of the light guide part, the rotating mirror is disposed inside the light guide part, and the light guide part is on the optical path of the source light so that the optical path of the source light generated from the light source is not blocked. A lidar device, characterized in that the source light transmitting portion is formed.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170095130A KR102350621B1 (en) | 2017-07-27 | 2017-07-27 | Lidar apparatus |
| PCT/KR2018/008501 WO2019022549A1 (en) | 2017-07-27 | 2018-07-27 | Lidar device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170095130A KR102350621B1 (en) | 2017-07-27 | 2017-07-27 | Lidar apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20190012345A KR20190012345A (en) | 2019-02-11 |
| KR102350621B1 true KR102350621B1 (en) | 2022-01-12 |
Family
ID=65040907
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020170095130A KR102350621B1 (en) | 2017-07-27 | 2017-07-27 | Lidar apparatus |
Country Status (2)
| Country | Link |
|---|---|
| KR (1) | KR102350621B1 (en) |
| WO (1) | WO2019022549A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11525912B2 (en) * | 2018-05-14 | 2022-12-13 | Korea Railroad Research Institute | Hyper-tube system using vehicle position detection |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111751838A (en) * | 2019-03-28 | 2020-10-09 | 上海小瞳智能科技有限公司 | Miniature solid-state laser radar and data processing method thereof |
| CN110161517B (en) * | 2019-05-22 | 2022-05-20 | 深圳市速腾聚创科技有限公司 | Laser radar system and laser scanning control method |
| CN111711749A (en) * | 2020-06-01 | 2020-09-25 | Oppo(重庆)智能科技有限公司 | Laser ranging device, camera module, electronic equipment and control method |
| CN112163438B (en) * | 2020-09-16 | 2022-03-18 | 珠海格力电器股份有限公司 | Light guide column structure and ring type scanner |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006038798A (en) * | 2004-07-30 | 2006-02-09 | Ihi Aerospace Co Ltd | Position detecting device of exothermic object |
| JP2016045137A (en) * | 2014-08-25 | 2016-04-04 | リコー光学株式会社 | Laser radar device and light-receiving device of laser radar device |
| KR101665938B1 (en) * | 2015-04-28 | 2016-10-13 | 전자부품연구원 | Optical system of multi lidar scanner using mirror rotation |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100345648B1 (en) * | 2000-07-24 | 2002-07-24 | 주식회사 라이다텍 | Integrated Transmitting&Receiving Micro-pulse LIDAR Optical System using Conic Lens |
| US8767190B2 (en) | 2006-07-13 | 2014-07-01 | Velodyne Acoustics, Inc. | High definition LiDAR system |
| JP5135131B2 (en) * | 2008-09-01 | 2013-01-30 | オムロンオートモーティブエレクトロニクス株式会社 | Light projecting unit and object detection device |
| JP5660429B2 (en) * | 2009-09-18 | 2015-01-28 | 株式会社デンソーウェーブ | Laser radar equipment |
| US20120170029A1 (en) | 2009-09-22 | 2012-07-05 | ISC8 Inc. | LIDAR System Comprising Large Area Micro-Channel Plate Focal Plane Array |
| KR20130017026A (en) * | 2011-08-09 | 2013-02-19 | 전자부품연구원 | System for detecting object |
| KR20130103060A (en) * | 2012-03-09 | 2013-09-23 | 삼성전기주식회사 | Device and method for three-dimensional measurement |
| US20140293263A1 (en) | 2013-03-28 | 2014-10-02 | James Justice | LIDAR Comprising Polyhedron Transmission and Receiving Scanning Element |
| US8836922B1 (en) | 2013-08-20 | 2014-09-16 | Google Inc. | Devices and methods for a rotating LIDAR platform with a shared transmit/receive path |
| KR101785253B1 (en) * | 2015-03-20 | 2017-10-16 | 주식회사 엠쏘텍 | LIDAR Apparatus |
| KR20170071394A (en) * | 2015-12-15 | 2017-06-23 | (주)다울아토닉스 | Detecting device for lidar light source without rotation and scanning |
-
2017
- 2017-07-27 KR KR1020170095130A patent/KR102350621B1/en active IP Right Grant
-
2018
- 2018-07-27 WO PCT/KR2018/008501 patent/WO2019022549A1/en active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006038798A (en) * | 2004-07-30 | 2006-02-09 | Ihi Aerospace Co Ltd | Position detecting device of exothermic object |
| JP2016045137A (en) * | 2014-08-25 | 2016-04-04 | リコー光学株式会社 | Laser radar device and light-receiving device of laser radar device |
| KR101665938B1 (en) * | 2015-04-28 | 2016-10-13 | 전자부품연구원 | Optical system of multi lidar scanner using mirror rotation |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11525912B2 (en) * | 2018-05-14 | 2022-12-13 | Korea Railroad Research Institute | Hyper-tube system using vehicle position detection |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019022549A1 (en) | 2019-01-31 |
| KR20190012345A (en) | 2019-02-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107209265B (en) | Optical detection and distance measurement device | |
| KR102350621B1 (en) | Lidar apparatus | |
| KR101785253B1 (en) | LIDAR Apparatus | |
| KR101785254B1 (en) | Omnidirectional LIDAR Apparatus | |
| US10281262B2 (en) | Range-finder apparatus, methods, and applications | |
| US9086273B1 (en) | Microrod compression of laser beam in combination with transmit lens | |
| US6723975B2 (en) | Scanner for airborne laser system | |
| KR102350613B1 (en) | Irrotational omnidirectional lidar apparatus | |
| US11808887B2 (en) | Methods and systems for mapping retroreflectors | |
| JP2021507207A (en) | Systems and methods for adaptive range coverage using lidar | |
| US11561287B2 (en) | LIDAR sensors and methods for the same | |
| CN110832347B (en) | Focal zone optical element for high performance optical scanner | |
| CN114222930A (en) | System and method for photodiode-based detection | |
| CN113874748A (en) | LIDAR transmitter and receiver optics | |
| KR101918683B1 (en) | LiDAR scanning device | |
| CN110895340A (en) | Optical ranging module | |
| CN111263898A (en) | Light beam scanning system, distance detection device and electronic equipment | |
| KR102297399B1 (en) | Lidar apparatus using dual wavelength | |
| US11561289B2 (en) | Scanning LiDAR system with a wedge prism | |
| WO2022126429A1 (en) | Ranging apparatus, ranging method, and movable platform | |
| KR102363318B1 (en) | Miniaturized Lidar Optical System | |
| US12025742B2 (en) | Scanning flash lidar with micro shutter array | |
| US12025701B2 (en) | Dynamic signal control in flash LiDAR | |
| US20220050183A1 (en) | Intertwined detector array for an optical sensing system | |
| US11372109B1 (en) | Lidar with non-circular spatial filtering |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right |