KR101182393B1 - Globe-shaped object - Google Patents
Globe-shaped object Download PDFInfo
- Publication number
- KR101182393B1 KR101182393B1 KR1020090082750A KR20090082750A KR101182393B1 KR 101182393 B1 KR101182393 B1 KR 101182393B1 KR 1020090082750 A KR1020090082750 A KR 1020090082750A KR 20090082750 A KR20090082750 A KR 20090082750A KR 101182393 B1 KR101182393 B1 KR 101182393B1
- Authority
- KR
- South Korea
- Prior art keywords
- golf ball
- spherical object
- image
- circle
- trigger signal
- Prior art date
Links
Images

































Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0021—Tracking a path or terminating locations
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B69/00—Training appliances or apparatus for special sports
- A63B69/36—Training appliances or apparatus for special sports for golf
- A63B69/3658—Means associated with the ball for indicating or measuring, e.g. speed, direction
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0021—Tracking a path or terminating locations
- A63B2024/0028—Tracking the path of an object, e.g. a ball inside a soccer pitch
- A63B2024/0031—Tracking the path of an object, e.g. a ball inside a soccer pitch at the starting point
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0021—Tracking a path or terminating locations
- A63B2024/0028—Tracking the path of an object, e.g. a ball inside a soccer pitch
- A63B2024/0034—Tracking the path of an object, e.g. a ball inside a soccer pitch during flight
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2102/00—Application of clubs, bats, rackets or the like to the sporting activity ; particular sports involving the use of balls and clubs, bats, rackets, or the like
- A63B2102/32—Golf
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/30—Speed
- A63B2220/34—Angular speed
- A63B2220/35—Spin
Landscapes
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biophysics (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
구형 물체가 개시된다. 구형(球形) 물체의 표면에는 마킹패턴이 표시되어 있으며, 마킹패턴은 구형 물체의 중심을 3차원 좌표공간의 원점에 위치시킨 후 구형 물체를 관측하는 시점(視點) 각각에 대해 상이한 패턴이 관측되도록 표시된다. 본 발명에 따르면, 특정한 패턴이 인쇄된 구형 물체를 카메라로 복수개 촬영하여 구형 물체의 비행정보와 회전정보를 정확하게 측정할 수 있다.A spherical object is disclosed. The marking pattern is marked on the surface of the spherical object, and the marking pattern is positioned so that the center of the spherical object is located at the origin of the three-dimensional coordinate space, so that a different pattern is observed for each point of time when the spherical object is observed. Is displayed. According to the present invention, a plurality of spherical objects printed with a specific pattern may be photographed with a camera, thereby accurately measuring flight information and rotation information of the spherical objects.
구형 물체, 비행정보, 회전정보, 트리거 신호, 에리어 카메라 Spherical object, flight information, rotation information, trigger signal, area camera
Description
본 발명은 구형(球形) 물체에 관한 것으로, 보다 상세하게는 표면에 마킹패턴이 표시되어 있는 공모양의 구형 물체에 관한 것이다.The present invention relates to a spherical object, and more particularly to a ball-shaped spherical object in which a marking pattern is displayed on the surface.
골프공, 야구공 등과 같은 구형 물체의 비행경로는 공에 물리적 힘이 가해진 시점(즉, 골프클럽 또는 배트에 의한 타격 시점)에 결정된다. 이러한 구형 물체의 비행경로를 결정하기 위해 사용되는 정보에는 공의 회전정보(즉, 회전속도 및 회전축), 진행방향, 속도 등이 포함된다. 비행하는 구형물체의 비행궤도를 예측하는 시스템의 일례로 골프 시뮬레이션 시스템이 있다. 이러한 골프 시뮬레이션 시스템의 대부분은 골프공의 궤적이 지나가는 공간에 레이저, 포토 다이오드, 초음파 센서 등을 이용하여 격자 형태의 센싱 영역을 생성하고, 골프공의 그림자 또는 골프공이 센싱 영역을 통과하는 순간에 공간 상에서 측정한 골프공의 위치, 골프공의 크기 등의 정보에 의해 골프공의 진행 방향과 속도를 측정한다. 그러나 이와 같은 기존의 골프 시뮬레이션 시스템은 골프공의 회전정보를 직접 측정할 수 없기 때문에 골프클럽의 움직임 데이터(골프클럽 헤드의 각도, 궤적 등)를 이용하여 공의 회전정보를 유추하는 방식을 사용하고 있다. 따라서 골프공의 정확한 타구의 궤적 계산에 한계를 가질 수 밖에 없다. 또한 기존의 골프 시뮬레이터는 고속으로 이동하는 공의 움직임을 포착하기 위해 공이 특정 위치를 통과하는지의 여부를 판별하기 위하여 포토 다이오드나 레이저를 이용한 광막을 발생하는 트리거 장치를 이용한다. 이러한 트리거 장치를 적용할 경우에는 트리거 장치가 골프공의 이동 경로 및 골퍼가 타격을 할 때의 골프클럽과 가까이 배치되어 트리거 장치와 골프공 및 골프클럽과 간섭을 일으키는 문제점이 있다.The flight path of a spherical object such as a golf ball, a baseball ball, etc. is determined at the time when a physical force is applied to the ball (that is, the time of hitting by a golf club or bat). The information used to determine the flight path of the spherical object includes the rotation information of the ball (ie, rotation speed and axis of rotation), direction of travel, speed, and the like. One example of a system for predicting flight trajectories of flying spherical objects is a golf simulation system. Most of these golf simulation systems use a laser, a photodiode, and an ultrasonic sensor to create a grid-shaped sensing area in the space where the trajectory of the golf ball passes, and at the moment the shadow of the golf ball or the golf ball passes through the sensing area. The direction and speed of the golf ball are measured based on information such as the position of the golf ball and the size of the golf ball measured in the above. However, since the existing golf simulation system cannot directly measure the rotational information of the golf ball, it uses the method of inferring the rotational information of the golf ball using the golf club's movement data (angle, trajectory, etc. of the golf club head). have. Therefore, the calculation of the trajectory of the accurate hitting of the golf ball has a limit. In addition, the existing golf simulator uses a trigger device for generating a light film using a photodiode or a laser to determine whether the ball passes through a specific position to capture the movement of the ball moving at high speed. In the case of applying such a trigger device, the trigger device is disposed close to the golf club when the movement path of the golf ball and the golfer is hitting, causing a problem of causing interference with the trigger device, the golf ball, and the golf club.
한편 미국특허공개공보 제2007-0213139호에는 두 개의 센서열에 의해 골프채의 궤적을 측정하고, 하나의 고속 카메라에 의해 마커라인이 형성된 골프공의 비행정보를 측정하는 시스템(이하, '종래기술 1'이라 함)이 개시되어 있다. 그러나 이는 현재 상용화된 소위 스크린 골프 시스템과 실질적으로 동일한 것으로, 이러한 종래기술 1에 의해서는 골프공의 회전정보를 정확하게 측정할 수 없는 동시에 고가의 고속 카메라를 채용하고 있어 전체적인 시스템의 제조비용이 높다는 문제가 있다. 나아가 사용자가 위치하는 타석의 바닥면 또는 바닥면으로부터 일정한 높이에 센서가 설치되어 있어, 심리적 요인이 많이 작용하는 골프경기의 특성상 사용자의 심적부담을 주는 동시에 센서의 오작동으로 인한 에러가 자주 발생하는 문제가 있다. On the other hand, US Patent Publication No. 2007-0213139 is a system for measuring the trajectory of the golf club by the two sensor strings, and flight information of the golf ball formed with a marker line by a single high-speed camera (hereinafter, 'prior art 1' Is disclosed. However, this is substantially the same as the so-called screen golf system that is currently commercialized. The
또한 한국등록특허 제10-0871595호에는 고속 라인스캔 카메라에 의해 두 개 이상의 마커라인(경선으로서 골프공의 중심점을 중앙으로 하여 골프공의 표면에 형성되는 원)이 형성된 골프공의 이미지를 촬영하여 초기속도를 구하고, 구해진 초기속도를 기초로 고속 라인스캔 카메라의 좌우측에 설치된 두 대의 고속 카메라에 일 정한 변위간격으로 골프공을 촬영하도록 트리거 신호를 제공함으로써 골프공의 비행정보를 획득하는 구성(이하, '종래기술 2'라 함)이 개시되어 있다. 그러나 이러한 종래기술 2는 골프공의 검출 및 초기속도를 산출하기 위해 고속 라인스캔 카메라를 채용하고 있고, 골프공의 비행정보를 측정하기 위해 고속 카메라를 채용하고 있어, 전체적인 시스템의 제조비용이 높다는 문제가 있다. 또한 종래기술 2는 골프공의 회전특성을 고려하지 아니하고, 두 대의 고속 카메라에 의한 연속촬영을 위해 제공되는 트리거 신호가 골프공의 변위를 기준으로 설정(즉, 각각의 트리거 신호에 따라 촬영된 복수의 영상에서 골프공이 겹치지 않도록 트리거 신호의 간격을 설정)하고 있다. 따라서 종래기술 2에 의하면 도 1에 도시된 바와 같이 첫 번째 촬영된 영상과 두 번째 촬영된 영상으로부터 골프공이 시계방향으로 30˚ 회전했는지 아니면 반시계방향으로 30˚ 회전했는지 정확히 측정할 수 없는 문제가 있다. In addition, Korean Patent No. 10-0871595 photographs a golf ball in which two or more marker lines (circles formed on the surface of the golf ball as a center line) are formed by a high-speed line scan camera. Obtaining the initial speed, and obtaining the flight information of the golf ball by providing a trigger signal to shoot the golf ball at a predetermined displacement interval to the two high-speed cameras installed on the left and right sides of the high-speed line scan camera based on the obtained initial speed (hereinafter , 'Prior Art 2'). However, this conventional technique 2 employs a high-speed line scan camera to detect the golf ball and calculate the initial speed, and employs a high-speed camera to measure the flight information of the golf ball. There is. In addition, prior art 2 does not consider the rotational characteristics of the golf ball, the trigger signal provided for continuous shooting by two high-speed camera is set based on the displacement of the golf ball (that is, a plurality of images taken in accordance with each trigger signal The distance between the trigger signals is set so that the golf balls do not overlap in the video. Therefore, according to the prior art 2, as shown in FIG. 1, it is difficult to accurately measure whether the golf ball is rotated 30 degrees clockwise or 30 degrees counterclockwise from the first image and the second image. have.
또한 미국공개특허공보 제2007-0060410호에는 하나의 고속 카메라로 오각형의 각 꼭지점 및 중심에 점이 인쇄된 골프공을 연속적으로 촬영하여 얻은 두 개의 영상 또는 두 개의 고속 카메라로 골프공을 연속적으로 촬영하여 얻은 두 개의 영상을 기초로 골프공의 비행정보를 측정하는 시스템(이하, '종래기술 3'이라 함)이 개시되어 있다. 그러나 이러한 종래기술 3 역시 골프공의 회전특성을 고려하지 아니하고, 한 대 또는 두 대의 고속 카메라로 에 의한 연속촬영을 위해 제공되는 트리거 신호가 골프공의 변위를 기준으로 설정(즉, 각각의 트리거 신호에 따라 촬영된 복수의 영상에서 골프공이 겹치지 않도록 트리거 신호의 간격을 설정)하고 있다. 따라서 종래기술 3에 의하면 첫 번째 촬영된 영상과 두 번째 촬영된 영상으로 부터 골프공이 시계방향으로 회전했는지 아니면 반시계방향으로 회전했는지 회전방향을 정확히 측정할 수 없는 문제가 있다. In addition, U.S. Patent Publication No. 2007-0060410 discloses a golf ball continuously shot with two images or two high speed cameras obtained by continuously shooting golf balls with dots printed at each vertex and center of a pentagon with one high speed camera. Disclosed is a system for measuring flight information of a golf ball based on two acquired images (hereinafter referred to as 'prior art 3'). However, this prior art 3 also does not consider the rotational characteristics of the golf ball, the trigger signal provided for continuous shooting by one or two high-speed camera is set based on the displacement of the golf ball (that is, each trigger signal The distance between the trigger signals is set so that the golf balls do not overlap in the plurality of images taken. Therefore, according to the prior art 3, there is a problem in that the direction of rotation cannot be accurately measured whether the golf ball is rotated clockwise or counterclockwise from the first image and the second image.
본 발명이 이루고자 하는 기술적 과제는, 회전정보를 포함하는 비행정보를 정확하게 측정할 수 있도록 표면에 마킹패턴이 표시된 구형 물체를 제공하는 데 있다.An object of the present invention is to provide a spherical object marked with a marking pattern on the surface in order to accurately measure flight information including rotation information.
상기의 기술적 과제를 달성하기 위한, 본 발명에 따른 구형 물체는, 표면에 마킹패턴이 표시되어 있는 구형(球形) 물체에 있어서, 상기 마킹패턴은 상기 구형 물체를 관측하는 시점(視點) 각각에 대해 상이한 패턴이 관측되도록 표시된다.In order to achieve the above technical problem, a spherical object according to the present invention is a spherical object in which a marking pattern is displayed on a surface thereof, wherein the marking pattern corresponds to each viewpoint of observing the spherical object. Different patterns are shown to be observed.
바람직하게는, 상기 마킹패턴은 복수의 마킹점으로 이루어진다.Preferably, the marking pattern is composed of a plurality of marking points.
바람직하게는, 상기 마킹점들은 상기 마킹점들 중에서 사전에 설정된 선택개수만큼 선택된 제1마킹점들을 연결하여 이루어지는 도형들 각각의 형상이 서로 상이하도록 표시된다.Preferably, the marking points are displayed such that the shapes of the figures formed by connecting the first marking points selected by a predetermined number of preset marking points among the marking points are different from each other.
바람직하게는, 상기 마킹점들은 상기 구형 물체의 중심을 3차원 좌표공간의 원점에 위치시킨 후 임의의 시점에서 상기 구형 물체를 촬영하여 얻어지는 측정영상들 각각에 나타나는 제2마킹점들 중에서 상기 선택개수만큼 선택된 제3마킹점들을 연결하여 이루어지는 도형들 각각의 형상이 서로 상이하도록 표시된다.Preferably, the marking points are selected from a number of second marking points appearing in each of the measured images obtained by photographing the spherical object at an arbitrary point after the center of the spherical object is located at the origin of a three-dimensional coordinate space. The shapes of the figures formed by connecting the selected third marking points are displayed to be different from each other.
바람직하게는, 상기 구형 물체의 표면을 8개의 영역으로 균등분할하여 이루어진 각각의 분할된 영역에 적어도 3개의 상기 마킹점들이 표시된다.Preferably, at least three of the marking points are displayed in each divided region made by equally dividing the surface of the spherical object into eight regions.
바람직하게는, 상기 마킹점들은 상기 구형 물체의 상반구 표면에 표시된 마킹점들을 연결하여 이루어지는 제1원의 중심과 상기 구형 물체의 하반구 표면에 표시된 마킹점들을 연결하여 이루어지는 제2원의 중심을 연결하는 직선이 상기 구형 물체의 중심을 지나가도록 표시되며, 상기 제1원과 상기 제2원의 크기가 상이하다.Preferably, the marking points are connected to the center of the first circle formed by connecting the marking points on the upper hemisphere surface of the spherical object and the center of the second circle formed by connecting the marking points on the lower hemisphere surface of the spherical object. A straight line to connect is displayed to pass through the center of the spherical object, and the size of the first circle and the second circle is different.
바람직하게는, 상기 제1원 상에 위치하는 마킹점들은 상기 제1원을 사등분하여 이루어진 호 중에서 서로 마주보는 호에는 서로 다른 개수 또는 간격으로 배치되며, 상기 제2원 상에 위치하는 마킹점들은 상기 제2원을 사등분하여 이루어진 호 중에서 서로 마주보는 호에는 서로 다른 개수 또는 간격으로 배치된다.Preferably, the marking points positioned on the first circle are arranged in different numbers or intervals in arcs facing each other among the arcs formed by dividing the first circle, and the marking points located on the second circle. They are arranged in different numbers or intervals in arcs facing each other among arcs formed by dividing the second circle.
바람직하게는, 상기 마킹패턴은 복수의 원으로 이루어진다.Preferably, the marking pattern is composed of a plurality of circles.
바람직하게는, 상기 복수의 원 중에서 제1원의 중심은 상기 구형 물체의 중심과 일치하고, 제2원은 상기 제1원과 교차되지 않도록 표시된다.Preferably, the center of the first circle among the plurality of circles coincides with the center of the spherical object and the second circle is marked not to intersect the first circle.
바람직하게는, 상기 복수의 원 중에서 제1원은 상기 구형 물체의 상반구에 표시되어 있고, 제2원은 상기 구형 물체의 하반구에 표시되어 있으며, 상기 제1원과 상기 제2원의 크기가 상이하다.Preferably, a first circle of the plurality of circles is indicated in the upper hemisphere of the spherical object, and a second circle is indicated in the lower hemisphere of the spherical object, and the size of the first circle and the second circle. Is different.
바람직하게는, 상기 구형 물체는 골프공이다.Preferably, the spherical object is a golf ball.
바람직하게는, 상기 마킹패턴들은 사용자가 인식할 수 없도록 적외선 도료로 표시된다.Preferably, the marking patterns are marked with infrared paint so that the user cannot recognize them.
본 발명에 따른 구형 물체에 의하면, 표면에 특정한 패턴이 표시된 구형 물체를 카메라로 복수개 촬영하여 구형 물체의 비행정보와 회전정보를 정확하게 측정 할 수 있다. 이때 구형 물체의 최대 비행속도 및 최대 회전속도를 고려하여 두 번의 트리거 신호의 시간 간격을 설정함으로써 정확하게 구형 물체의 비행정보 및 회전정보를 측정할 수 있다. 또한 타석의 바닥면에 구형 물체의 비행정보를 측정하기 위한 어떠한 장치도 설치되지 않으면서 저가의 시스템에 의해 구형 물체의 회전정보를 포함하는 비행정보를 정확하게 측정할 수 있다. 또한 통상적인 에리어 카메라의 이미지 센서를 구성하는 CCD 라인 중에서 일부의 CCD 라인만을 활성화시켜 에리어 카메라의 A/D 변환기의 처리속도를 증가시킴으로써, 한 대의 저가 에리어 카메라로 두 대 이상의 고속 라인 스캔 카메라를 구현하여 전체적인 시스템의 제작비용을 줄일 수 있다. According to the spherical object according to the present invention, it is possible to accurately measure the flight information and the rotation information of the spherical object by photographing a plurality of spherical objects marked with a specific pattern on the surface with a camera. In this case, the flight information and the rotation information of the spherical object can be accurately measured by setting the time interval of the two trigger signals in consideration of the maximum flight speed and the maximum rotation speed of the spherical object. Also, without any device for measuring flight information of the spherical object on the bottom surface of the turn at bat, a low-cost system can accurately measure flight information including the spherical object rotation information. In addition, by activating only some of the CCD lines constituting the image sensor of the conventional area camera to increase the processing speed of the A / D converter of the area camera, two or more high-speed line scan cameras are realized by one low-cost area camera. The overall system manufacturing cost can be reduced.
이하에서 첨부된 도면들을 참조하여 본 발명에 따른 구형 물체의 바람직한 실시예에 대해 상세하게 설명한다. 이하의 설명에서 골프공을 구형 물체의 예로 들어 설명하나, 본 발명의 범주는 이에 한정되지 아니하며, 야구공과 같은 여타 구형 물체에도 본 발명이 적용될 수 있다.Hereinafter, exemplary embodiments of the spherical object according to the present invention will be described in detail with reference to the accompanying drawings. In the following description, a golf ball is described as an example of a spherical object, but the scope of the present invention is not limited thereto, and the present invention may be applied to other spherical objects such as a baseball.
도 2는 본 발명에 따른 구형 물체의 비행정보 측정 시스템에 대한 바람직한 일 실시예의 구성을 도시한 도면이고, 도 3은 본 발명에 따른 구형 물체의 비행정보 측정 시스템에 대한 바람직한 일 실시예의 상세한 구성을 도시한 블록도이다.2 is a view showing the configuration of a preferred embodiment of the flight information measurement system of a spherical object according to the present invention, Figure 3 is a detailed configuration of a preferred embodiment of the flight information measurement system of a spherical object according to the present invention The block diagram shown.
도 2 및 도 3을 참조하면, 본 발명에 따른 구형 물체의 비행정보 측정 시스템은 트리거 신호 생성부(210), 촬영부(220), 조명부(230), 영상획득부(240) 및 정보측정부(250)를 구비한다.2 and 3, the flight information measuring system of a spherical object according to the present invention includes a trigger
트리거 신호 생성부(210)는 골프공이 위치하는 타석의 상부(바람직하게는 타석공간의 천장)에 설치되어 골프공이 영상획득영역을 통과할 때 트리거 신호를 발생한다. 이때 트리거 신호 생성부(210)는 골퍼에 의한 간섭을 배제하기 위해 스크린 쪽으로 약간 이동되어 설치되는 것이 바람직하다. 트리거 신호 생성부(210)에 의해 발생된 트리거 신호는 영상획득부(240)로 제공된다. 트리거 신호 생성부(210)로는 복수열의 라인센서로 이루어진 에리어 카메라가 채용되며, 이러한 에리어 카메라의 촬영영역은 촬영부(220)에 구비된 4대의 에리어 카메라의 촬영영역과 일치되도록 설정되는 것이 바람직하다. 본 발명에 있어서 저가로 고속 라인센서 카메라의 효과를 얻기 위해 트리거 신호 생성부(210)로 채용되는 에리어 카메라에 대한 변경이 필요하다. 이는 에리어 카메라에 구비된 이미지 센서의 일부 영역(즉, N개의 CCD 라인 중에서 일부 CCD 라인)만을 활성화시킴으로써 초당 촬영가능한 프레임의 수를 증가시키는 방식으로 구현된다. The trigger
도 4에는 트리거 신호 생성부(210)에 채용되는 카메라의 상세한 구조가 도시되어 있다. 도 4를 참조하면, 트리거 신호 생성부(210)는 렌즈(410), 이미지 센서(420), 프로그램 메모리(430), 마이크로 프로세서(440), 이미지 메모리(450), 통신모듈(460), 트리거 회로(470) 및 전원회로(480)로 구성된다.4 illustrates a detailed structure of the camera employed in the
이미지 센서(420)는 렌즈(410)를 통해 입사되는 광을 전기적 신호로 변환하여 출력한다. 이러한 이미지 센서(420)는 광전변환소자(Charge Coupled Device)가 어레이 형태로 배치되어 이루어지는 CCD 패널(421), 수평방향 주소 레지스터(422), 수직방향 주소 레지스터(423), 증폭기(424), 복수의 A/D 컨버터(425) 및 다중화 기(426)로 구성된다. The
이와 같은 이미지 센서(420)는 통상의 에리어 카메라에 장착되는 이미지 센서와 동일한 구성이다. 그러나 통상의 에리어 카메라에 장착되어 있는 이미지 센서는 A/D 컨버터를 통해 모든 CCD 라인으로부터 출력되는 아날로그 신호를 디지털 영상으로 변환하며, 이러한 신호 변환시 상당한 처리 시간이 요구된다. 따라서 통상의 에리어 카메라에 의해 골프공의 회전정보를 측정할 수 있을 정도로 빠른 시간 내에 복수의 영상을 촬영하는 것은 불가능하므로, 종래의 비행정보 측정 시스템들은 모두 고가의 고속 라인스캔 카메라를 채용하고 있다. 이러한 문제를 해결하기 위해 본 발명에서는 이미지 센서(420)의 CCD 패널(421)을 구성하는 복수개의 CCD 라인 중에서 일부 CCD 라인만을 활성화시켜 A/D 컨버터(425)의 처리 속도를 증가시키는 방식을 제안한다. 640×480(픽셀)의 풀 프레임(Full Frame)을 기준으로 초당 250장의 영상을 촬영할 수 있는 이미지 센서를 예로 들면, 전체 CCD 라인 중에서 5개의 CCD 라인만을 활성화시키면 A/D 컨버터의 처리 속도의 증가로 인해 초당 3000장 이상의 영상을 촬영할 수 있게 된다. 이와 같이 5개의 CCD 라인만 활성화된 이미지 센서(420)의 스캔 주기는 3kHz이며, 마이크로 프로세서(440)의 처리 속도를 증가시키면 보다 높은 스캔 주기를 얻을 수 있다(즉, 초당 보다 많은 영상의 촬영이 가능하다). Such an
상기한 바와 같이 일부 CCD 라인만을 활성화시키기 위해 프로그램 메모리(430)의 설정을 변경하여 촬영 영상을 A/D 컨버터(425)를 통해 아날로그 신호를 디지털 신호로 변환하는 영역을 조절한다. 이는 트리거 신호 생성부(310)로 채용되 는 에리어 카메라의 랜덤 윈도윙(Random Windowing) 기능에 의해 가능하다. 즉, 이미지 센서(420)가 지원하는 랜덤 윈도윙 기능을 이용하여 전체 CCD 패널(421)의 CCD 라인 중에서 일부 라인만 디지털 영상으로 변경하도록 설정할 수 있다. 그리고 이를 통해 저가의 단일 에어리어 카메라를 이용하여 다수의 고속 라인스캔 트리거 카메라를 이용하는 것과 동일한 기능이 구현될 수 있다. 이때 골프공의 크기와 비행특성을 고려하여 활성화되는 CCD 라인에 의해 촬영된 영상 데이터 만을 기초로 마이크로 프로세서(540)가 골프공의 통과여부를 판단한다. 이때 활성화된 CCD 라인으로부터 출력되는 영상은 A/D 컨버터(425)를 통해 디지털 신호로 변환된 후 이미지 메모리(450)에 임시로 저장된다. As described above, in order to activate only some CCD lines, the setting of the
한편 프로그램 메모리(430)에는 카메라의 하드웨어 작동을 위한 펌웨어와 이미지 센서(420)에서 촬영되어 이미지 메모리(450)에 저장된 디지털 영상을 분석하여 골프공의 통과여부를 판단한 후 트리거 신호를 발생하는 프로그램이 저장된다. 마이크로 프로세서(440)는 프로그램 메모리(430)에 저장되어 있는 프로그램의 실행을 통해 골프공의 통과 여부를 판단한 후 트리거 신호를 발생하는 기능을 수행하며, 카메라 외부에서 통신을 통하여 전달받은 이미지 센서(420)의 활성 CCD 라인의 변경(즉, 촬영 영역의 변경)과 같은 사항을 이미지 센서(420)에 적용하는 기능을 수행한다. In the
통신모듈(460)은 트리거 신호 생성부(210)와 외부 컴퓨터 간의 데이터 통신을 위해 사용되며, USB 통신모듈 등과 같은 유선 통신모듈 또는 블루투스 통신모듈 등과 같은 무선 통신모듈이 이를 위해 채용될 수 있다. 이때 통신모듈(460)을 통한 데이터 통신은 트리거 신호 생성부(210)의 설정 시에만 허용되고, 실제 동작 시는 실시간 동작을 위해 통신모듈(460)을 통한 데이터 통신이 제한되는 것이 바람직하다. 통신모듈(460)로 USB 통신모듈이 채용된 경우에 USB 포트를 통해 트리거 신호 생성부(210)에서 촬영된 영상이 외부 컴퓨터에 인스톨된 카메라 설정 프로그램로 전달되며, 카메라 설정 프로그램에서 지정된 영상 촬영 영역과 골프 공 판정과 관련한 변수가 트리거 신호 생성부(210)로 전송된다. 카메라 설정 프로그램은 트리거 신호 생성부(210)의 전체 촬영 영역 중 골프공 통과를 감지할 영역을 변경하는 기능과 트리거 신호 생성부(210) 내에서 작동하는 골프공 통과 유무를 판단하는 영상 분석 로직의 변수의 설정 값을 변경하는 기능을 제공한다. 트리거 신호 생성부(210)는 외부 컴퓨터에서 실행되는 카메라 설정 프로그램과 독립적으로 동작하며, 카메라 설정 프로그램은 트리거 신호 생성부(210)의 설정에만 사용되는 것이 바람직하다. 트리거 회로(470)는 마이크로 프로세서(440)로부터 제어명령이 입력되는 시점에 영상획득부(240)로 TTL 레벨의 트리거 신호를 출력한다. 그리고 전원회로(480)는 카메라의 내부 전자회로 동작에 필요한 전원 관리 기능을 수행한다.The
이하에서는 도 4에 도시된 트리거 신호 생성부(210)에 채용되는 카메라를 설정하는 방법 및 이를 이용하여 트리거 신호를 생성하는 방법에 대해 설명한다.Hereinafter, a method of setting a camera employed in the
본 발명에서 트리거 신호 생성부(210)로 채용되는 카메라는 일반적인 에리에 카메라이다. 따라서 이를 고속 트리거 카메라로 사용하기 위해서는 상술한 바와 같이 전체 센서라인 중에서 일부의 센서라인만 선택적으로 활성화시킬 필요가 있다. 이를 위해 먼저 사용자 또는 관리자는 통신모듈(460)을 통해 트리거 신호 생성 부(210)와 연결되어 있는 외부 컴퓨터를 통해 이미지 센서(410)의 CCD 라인 중에서 활성화시킬 라인에 관한 정보를 마이크로 프로세서(440)에 제공한다. 마이크로 프로세서(440)는 이미지 센서(410)가 지원하는 랜덤 윈도윙(random windowing) 기능을 이용하여 전체 CCD 라인 중에서 사용자 또는 관리자가 지정한 CCD 라인만을 활성화시킨다. 이때 골프공이 진행하는 방향으로 배열되어 있는 이미지 센서(310)의 CCD 라인 중 임의로 하나 이상의 CCD 라인을 활성화시킬 CCD 라인(이하, '활성 CCD 라인'이라 함)으로 지정한다. The camera employed as the
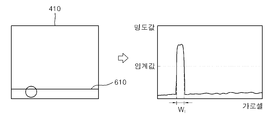
도 5에는 한 개의 CCD 라인을 활성 CCD 라인으로 지정한 예가 도시되어 있다. 도 5를 참조하면, 골프공이 활성 CCD 라인(510)에 위치하게 되면, 배경인 인조 잔디에 비하여 상대적으로 높은 광도(brightness)를 갖는 일정 폭의 영상이 라인 방향으로 촬영되게 된다. 따라서 활성 CCD 라인(510)에 의해 촬영된 아날로그 영상신호는 A/D 컨버터(425)를 통해 디지털 영상신호로 변환된다. 마이크로 프로세서(440)는 디지털 영상신호의 명도 레벨이 사전에 설정된 임계값보다 높은 값이 연속되는 영역의 폭에 의해 골프공의 통과여부를 판단한다. 흰색의 골프공은 골프 클럽이나 골퍼의 신체와 같은 장애물에 비해 높은 빛의 반사율을 갖고 있다. 따라서 디지털 영상신호의 명도 레벨을 기초로 골프공을 검출하는 것이 가능하다. 이때 마이크로 프로세서(440)는 디지털 영상신호의 명도 레벨이 사전에 설정된 임계값보다 높은 값이 연속되는 영역의 폭이 주어진 골프공 감지폭의 범위(즉, 골프공의 직경을 기준으로 설정된 상한값과 하한값 사이의 범위) 이내에 존재하면 골프공으로 판정한다. 이와 같이 한 개의 CCD 라인을 활성 CCD 라인(510)으로 지정할 경우에, 이 미지 센서(410)의 촬영 주기가 초당 3000회 이고, 골퍼가 타격한 골프공의 최고 속도가 약 84 m/s라 하면, 활성 CCD 라인(510)에 의해 지름이 약 4.2㎝인 골프공은 적어도 1회 이상 촬영되게 된다. 5 shows an example in which one CCD line is designated as the active CCD line. Referring to FIG. 5, when the golf ball is positioned on the
도 6a 및 도 6b에는 활성 CCD 라인(610)에 위치한 각각의 골프공에 대해 촬영된 디지털 영상신호의 예가 도시되어 있다. 도 6a 및 도 6b에 도시된 디지털 영상신호를 살펴보면, 마이크로 프로세서(440)로 입력되는 디지털 영상신호에는 활성 CCD 라인(610)이 영상을 촬영한 시점에 활성 CCD 라인(610)에 위치한 골프공의 크기에 대응하는 부분의 밝기값이 주어진 임계값(인조 잔디의 명도 레벨과 골프공의 명도 레벨 사이에서 설정되는 값)보다 높게 나타난다. 따라서 골프공이 활성 CCD 라인(610)을 통과하면, 마이크로 프로세서(440)는 순차적으로 입력되는 디지털 영상신호에서 사전에 설정된 임계값보다 높은 명도 레벨을 갖는 영역의 폭(W1 및 W2)을 검출하고, 해당 영역의 폭과 골프공의 직경을 기초로 골프공의 통과여부를 파악한다. 이때 활성 CCD 라인의 위치, 명도 임계값 및 골프공 판정폭의 상한값과 하한값은 외부 컴퓨터에서 실행되는 카메라 설정 프로그램에서 변경할 수 있다.6A and 6B show examples of digital image signals captured for each golf ball located on the
도 6a와 도 6b에 도시된 바에 따르면, 골프공의 위치에 따른 임계값보다 높은 명도 레벨을 갖는 영역의 폭은 골프공의 일부만 활성 CCD 라인(610)에 위치한 경우(즉, 도 6a의 W1)보다 골프공의 중심이 활성 CCD 라인(610)에 위치한 경우(즉, 도 6b의 W2)가 더 크게 된다. 만약 골프공이 통과한 것으로 판단되면, 마이크로 프로세서(440)는 트리거 회로(470)로 트리거 신호를 생성하도록 지시하고, 이에 따라 트리거 회로(470)는 트리거 신호를 생성하여 영상획득부(240)로 출력한다. 6A and 6B, the width of the region having a brightness level higher than the threshold value according to the position of the golf ball is defined when only a part of the golf ball is located on the active CCD line 610 (ie, W 1 in FIG. 6A). If the center of the golf ball is located in the active CCD line 610 (ie, W 2 of FIG. 6B) becomes larger. If it is determined that the golf ball has passed, the
이때 골프공의 속도정보 및 방향정보를 측정하기 위해서는 영상획득부(240)로 두 번의 연속적인 트리거 신호가 제공되어야 한다. 또한 골프공의 회전정보를 정확하게 측정하기 위해서는 영상획득부(240)로 출력되는 두 개의 트리거 신호 사이의 시간 간격이 적절하게 조절되어야 한다. 이는 두 번의 연속적인 트리거 신호에 의한 영상의 촬영 시점이 회전축의 변화와 관계없이 골프공의 회전량이 180°미만이 되어야 골프공의 회전방향을 정확하게 파악할 수 있기 때문이다. 본 발명에서는 이러한 두 개의 트리거 신호 사이의 시간 간격을 골퍼가 타격한 골프공의 최대 비행속도와 최대 회전속도를 고려하여 결정한다. At this time, in order to measure the speed information and direction information of the golf ball, two consecutive trigger signals should be provided to the
골프공이 최대 비행속도로 비행할 경우를 고려하면, 첫번째와 두번째 트리거 신호 사이의 시간 간격은 촬영부(220)가 첫번째 트리거 신호에 의해 골프공을 촬영한 시점으로부터 골프공이 촬영부(220)의 촬영영역을 통과하기 이전에 촬영부(220)가 두번째 트리거 신호에 의해 골프공을 촬영할 수 있도록 설정되어야 한다. 따라서 골프공의 최대 비행속도를 고려한 트리거 신호의 시간 간격의 최대값 dTmax1 [s]는 다음의 수학식으로 나타낼 수 있다.Considering the case where the golf ball is flying at the maximum flight speed, the time interval between the first and second trigger signals is taken by the golf ball from the point where the photographing

여기서, Lv는 촬영부(220)의 촬영영역의 세로방향(골프공의 진행방향)의 길 이, Dv는 촬영부(220)의 촬영영역의 진입경계로부터 첫번째 트리거 신호에 의해 골프공이 촬영되는 시점까지 골프공이 촬영영역의 세로방향으로 비행한 거리(이는 실질적으로 촬영부(220)의 촬영영역의 진입경계로부터 트리거 신호 생성부(210)의 활성 CCD 라인의 촬영영역의 진출경계까지의 거리와 동일함), 그리고, Vmax는 골프공의 최대 비행속도이다. Here, L v is the length in the longitudinal direction (going direction of the golf ball) of the shooting area of the
한편, 골프공이 최대 회전속도로 회전하고 있는 경우를 고려하면, 첫번째 트리거 신호에 의한 영상촬영 시점과 두 번째 트리거 신호에 의한 영상촬영 시점 사이에 골프공이 회전한 각도가 180˚ 미만일 경우에만 골프공의 회전방향과 회전각도를 정확히 계산할 수 있다. 만약 두 시점 간의 골프공 회전각도가 180˚ 이상이면, 회전방향과 회전각도에 대한 수학적 계산식의 해가 2개가 존재하므로, 골프공의 회전을 정확히 판정할 수 없다. 따라서 골프공의 최대 회전속도를 고려한 트리거 신호의 시간 간격의 최대값 dTmax2 [s]는 다음의 수학식으로 나타낼 수 있다.On the other hand, considering the case where the golf ball is rotating at the maximum rotation speed, the golf ball is rotated only when the angle of rotation of the golf ball is less than 180 degrees between the time of image capture by the first trigger signal and the time of image capture by the second trigger signal. The direction of rotation and angle of rotation can be calculated accurately. If the golf ball rotation angle between two views is more than 180 °, since there are two solutions of the mathematical calculation formula for the rotation direction and the rotation angle, the golf ball rotation cannot be accurately determined. Therefore, the maximum value dT max2 [s] of the time interval of the trigger signal considering the maximum rotational speed of the golf ball can be expressed by the following equation.

여기서, Nmax는 골프공의 최대 회전속도이다. Where N max is the maximum rotational speed of the golf ball.
따라서 두 개의 트리거 신호의 시간 간격의 최대값 dTmax는 dTmax1과 dTmax2 중 최소값이 되며, 결과적으로 두 개의 트리거 신호의 시간 간격은 다음의 수학식에 의해 결정된다.Therefore, the maximum value dT max of the time intervals of the two trigger signals becomes the minimum value of dT max1 and dT max2 . As a result, the time intervals of the two trigger signals are determined by the following equation.
![]()
![]()
만약 첫번째 트리거 신호에 의한 골프공의 촬영시 골프공의 위치가 세로길이가 26㎝인 촬영부(220)의 촬영영역의 진입경계로부터 진출경계쪽으로 5㎝ 이격된 지점이라 하고, 골프공의 최대 비행속도를 84 m/s라 하면, 수학식 1에 의해 dTmax1은 약 2.5 msec가 되며, 이때 측정가능한 최대 회전속도는 12,000 rpm이 된다. 또한 골프공의 최대 회전속도를 10,000 rpm이라 하면, 수학식 2에 의해 dTmax2는 3 msec가 된다. 따라서 골프공의 최대 비행속도와 최대 회전속도를 고려한 두 개의 트리거 신호의 시간 간격은 2.5 msec 이하로 설정된다. 이때 두 개의 트리거 신호의 시간 간격이 크게 설정될수록 두 개의 트리거 신호에 의한 촬영간극 사이에 골프공이 비행한 거리가 증가하게 되어 다음의 표에서 알 수 있듯이 최종적인 측정오차가 작아지므로, 두 개의 트리거 신호의 시간 간격은 수학식 3에 의해 계산된 트리거 신호의 시간 간격의 최대값으로 설정되는 것이 바람직하다.If the golf ball is photographed by the first trigger signal, the position of the golf ball is 5 cm away from the entrance boundary of the photographing area of the photographing
시간 간격 (msec)Trigger signal
Time interval (msec)
회전 속도 오차 (rpm)
(180°구분 기준)If the measurement error is 1 °
Rotational speed error (rpm)
(Based on 180 ° classification)
속도 오차 (m/s)If the measurement error is 0.5 mm
Speed error (m / s)
표 1에 기재된 시뮬레이션 오차는 영상처리 후 각각의 트리거 신호의 출력시점에서의 골프공의 중심 오차가 공의 진행방향으로 0.5㎜인 경우를 가정하여 산출된 값이다. 표 1에서 알 수 있듯이, 초속 50 m/s의 속도로 타격된 골프공의 경우에, 트리거 신호의 시간 간격이 0.5 msec로 설정되어 있다면, 속도 오차는 49 m/s ~ 51 m/s 사이에서 변동될 수 있다. 이러한 2 m/s의 오차는 골프공의 비행거리를 산출함에 있어서 큰 영향을 주게 된다. 그러나 트리거 신호의 시간 간격이 2.5 msec로 설정되어 있다면, 속도 오차는 49.8 m/s ~ 50.2 m/s 사이에서 변동되며, 따라서 트리거 신호의 시간 간격을 크게 할수록 골프공의 비행거리를 산출함에 있어서 오차를 줄일 수 있게 된다. 이러한 상황은 회전 오차의 산출에 있어서도 동일하게 적용된다.The simulation error shown in Table 1 is calculated on the assumption that the center error of the golf ball at the time of output of each trigger signal after image processing is 0.5 mm in the direction of the ball. As can be seen from Table 1, in the case of a golf ball hit at a speed of 50 m / s per second, if the time interval of the trigger signal is set to 0.5 msec, the speed error is between 49 m / s and 51 m / s. Can vary. This error of 2 m / s has a great influence in calculating the flight distance of the golf ball. However, if the time interval of the trigger signal is set to 2.5 msec, the speed error varies between 49.8 m / s and 50.2 m / s. Therefore, the larger the time interval of the trigger signal, the greater the error in calculating the flight distance of the golf ball. Can be reduced. This situation applies equally to the calculation of the rotational error.
한편, 활성 CCD 라인으로 지정되는 CCD 라인의 개수나 지정방식은 필요에 따라 다양하게 변경될 수 있다. 일예로, 활성 CCD 라인을 지정할 때, K개의 CCD 라인으로 이루어진 이미지 스캐닝 윈도우를 구성한 후 이미지 스캐닝 윈도우를 구성하는 CCD 라인의 첫번째 라인으로부터 등간격으로 M개의 CCD 라인을 지정하는 방식이 채용될 수 있다.Meanwhile, the number or designation method of the CCD lines designated as the active CCD lines may be variously changed as necessary. For example, when designating an active CCD line, a method of configuring M CCD lines at equal intervals from the first line of the CCD line constituting the image scanning window after constructing an image scanning window composed of K CCD lines may be employed. .
도 7에는 이미지 센서(410)를 구성하는 CCD 라인 중에서 골프공의 진행방향으로 골프공의 직경의 1/2에 상응하는 33개의 CCD 라인(즉, K=33)을 이미지 스캐닝 윈도우(710)로 설정한 예가 도시되어 있다. 도 7을 참조하면, 이미지 스캐닝 윈도우(710)를 33개의 CCD 라인(즉, K=33)으로 구성하였을 때, 골프공이 진행하는 방향으로 이미지 스캐닝 윈도우의 첫번째 CCD 라인(720), 아홉번째 CCD 라인(725), 열일곱번째 CCD 라인(730), 스물다섯번째 CCD 라인(735) 및 서른세번째 CCD 라인(740)들이 활성화된 CCD 라인으로 지정된다. 이와 같이 활성 CCD 라인을 지정하면, 이미지 센서(410)를 구성하는 CCD 라인 중에서 5개의 CCD 라인의 출력신호만 영상 신호로 변환하게 되므로, 이미지 센서(410)에 내장된 A/D 컨버터(425)의 계산 부하를 감소시킬 수 있다. 따라서 결과적으로 초당 촬영 가능한 프레임 수가 250 프레임에서 3000 프레임 이상으로 증가된다. 또한 5개의 활성 CCD 라인을 골프공 검출라인으로 사용함으로써, 하나의 활성 CCD 라인을 사용할 때와 비교하여 골프공 통과 여부를 검출하는 정도를 5배 증가시킬 수 있다. In FIG. 7, 33 CCD lines (that is, K = 33) corresponding to one-half the diameter of the golf ball in the traveling direction of the golf ball among the CCD lines constituting the
도 7에 도시된 바와 같이 등간격으로 5개의 CCD 라인을 활성 CCD 라인으로 설정한 경우에 마이크로 프로세서(440)는 5개의 활성 CCD 라인(720 내지 745)의 영상을 추출하여 각 라인 별로 영상신호를 분석하고, 활성 CCD 라인 상에 골프 공이 존재하는지 유무를 판별하게 된다. 일예로, 도 8a에 도시된 바와 같이 골프공이 3개의 활성 CCD 라인(720, 725, 730) 상에 위치하게 되면, 도 8b에 도시된 바와 같은 촬영 영상이 마이크로 프로세서(440)로 입력된다. 한편 이미지 센서(410)의 영상촬영 주기가 1/3000 sec이고, 골프공의 최고 구속이 84 m/s일 때, 골프공은 1/3000 sec 동안 28㎜를 이동하게 된다. 따라서 골프공 반경 크기의 이미지 스캐닝 윈도우(710) 내에 등간격으로 설정된 5개의 활성 CCD 라인에 의해 골프공의 유무를 판단하게 되면, 5.6 ㎜의 간격으로 골프공의 통과유무를 모니터링하는 효과를 얻을 수 있다. 이러한 방식으로 마이크로 프로세서(440)는 골프공의 통과여부를 확인하여 첫번째 트리거 신호를 생성하도록 트리거 회로(470)로 제어명령을 출력하고, 이어서 상술한 바와 같은 방법으로 결정된 시간 간격이 경과된 후 두번째 트리거 신호를 생성하도록 트리거 회로(470)로 제어명령을 출력한다. As shown in FIG. 7, when five CCD lines are set as the active CCD lines at equal intervals, the
도 9는 3개의 CCD 라인을 활성 CCD 라인으로 지정한 예를 도시한 도면이다. 도 9를 참조하면, 제1활성 CCD 라인(910)은 골프공의 타격 시 골프공의 영상획득 영역 통과 여부를 감지하는 데 사용된다. 이러한 제1활성 CCD 라인(910)에 의한 트리거 신호 생성과정은 도 5를 참조하여 설명한 한 개의 CCD 라인을 활성 CCD 라인으로 지정하여 트리거 신호를 생성하는 과정과 동일하므로 상세한 설명은 생략한다. 한편 제2활성 CCD 라인(920)은 제1활성 CCD 라인(910)과 일정한 거리(골프공의 반경 21mm 이내에서 골프공의 저속/고속비행여부 판단을 위한 임계값과 골프공 여부의 판단을 위한 광도폭의 설정값에 따라 가변됨) 만큼 이격되도록 설정된다. 이러한 제2활성 CCD 라인(920)은 골프공의 속도 레벨을 판단하기 위해 사용된다. 즉, 마이크로 프로세서(440)는 제1활성 CCD 라인(910)과 제2활성 CCD 라인(920) 각각에 의한 골프공 검출시점의 간격과 제1활성 CCD 라인(910)과 제2활성 CCD 라인(920)의 이격 거리를 기초로 골프공의 비행속도를 산출하여 골프공의 비행상태를 저속모드와 고속모드로 구분한다. 이러한 비행모드의 구분에 있어서 제1활성 CCD 라인(910)과 제2활성 CCD 라인(920)의 이격 거리는 사전에 설정되어 있으므로, 실질적으로 마이크로 프로세서(440)는 제1활성 CCD 라인(910)과 제2활성 CCD 라인(920) 각각에 의한 골프공 검출시점의 간격이 사전에 설정된 기준값보다 크면 저속모드로 판정하고, 작으면 고속모드로 판정한다. 9 is a diagram showing an example in which three CCD lines are designated as active CCD lines. Referring to FIG. 9, the first
상술한 바와 같이 제1활성 CCD 라인(910)과 제2활성 CCD 라인(920)을 이용하여 골프공의 비행모드를 판정하는 경우에 트리거 신호 생성부(210)는 두번째 트리거 신호의 출력시점을 비행모드에 따라 가변적으로 결정한다. 예를 들어, 골프공이 고속으로 움직이는 것으로 판정된 경우에 트리거 신호 생성부(210)는 제1활성 CCD 라인(910)에서 골프공이 감지되어 첫번째 트리거 신호를 출력한 시점으로부터 2.5 msec 이후에 트리거 신호를 출력한다. 이와 달리 골프공이 저속으로 움직이는 것으로 판정된 경우에 트리거 신호 생성부(210)는 제1활성 CCD 라인(910)에서 골프공이 감지되어 첫번째 트리거 신호를 출력한 시점으로부터 40 msec 이후에 트리거 신호를 출력한다. 이와 같이 비행모드에 따라 트리거 신호의 출력 간격을 조절하는 이유는 다음과 같다. 골프 타격 중 퍼팅의 경우(즉, 저속 모드)는 고속 이동 시에 비하여 골프공의 속도가 현저히 낮으므로, 고속 이동시와 타격과 동일한 시간 간격으로 영상을 촬영할 경우에 골프공의 공간상의 위치의 변화가 거의 없다. 따라서 2.5 msec 동안 골프공이 이동하는 거리가 매우 작게 되어 퍼팅 시의 골프공의 속도와 회전을 계산하는 데 오차가 증가하게 된다. 이러한 문제점을 보완하기 위하여 퍼팅과 같이 골프공이 영상 촬영 구간을 저속으로 통과할 경우에 트리거 신호 생성부(210)는 고속 모드와 달리 40 msec의 시간 간격으로 첫번째 및 두번째 트리거 신호를 출력한다. As described above, when the flight mode of the golf ball is determined using the first
제3활성 CCD 라인(930)은 골퍼가 실수한 샷에 의해 제1활성 CCD 라인(910)과 제2활성 CCD 라인(920)에서 골프공과 클럽이 겹치는 상황이 발생할 경우를 대비한 보조적인 골프공 검출 라인으로 사용된다. 따라서 제3활성 CCD 라인(930)은 선택적으로 구비될 수 있으며, 제1활성 CCD 라인(910)에 의한 골프공 검출방법과 동일한 방식으로 동작한다.The third
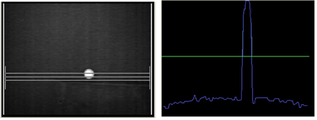
도 10a 내지 도 10d에는 트리거 신호 생성부(210)에 의해 얻어진 영상과 활성 CCD 라인 내의 명도값이 도시되어 있다. 도 10a 내지 도 10d에 도시된 바와 같은 영상들은 실제 사용시에는 실시간 처리를 위해 외부에 구비된 PC로 전송되지 않고, 트리거 신호 생성부(210)의 설정시에만 외부에 구비된 PC로 전송된다. 또한 도 10a 내지 도 10d의 좌측 영상에서 활성 CCD 라인의 위치는 자유롭게 변경될 수 있으며, 우측 영상의 크기는 640 x 480 (픽셀)로서 트리거 신호의 출력을 위해 설정되는 명도 레벨의 임계값과 골프공의 폭에 대한 임계값 등은 필요에 따라 변경될 수 있다. 10A through 10D show an image obtained by the
도 10a의 좌측 영상에는 활성 CCD 라인인 수평 라인 상에 위치한 골프공(백색 원)과 A4 용지(백색 사각형)가 나타나 있고, 우측 영상에는 골프공과 A4 용지에 대응하는 부분의 명도값이 명도 레벨의 임계값보다 높음이 나타나 있다. 또한 도 10b의 좌측 영상에는 활성 스캔 라인 상에 위치한 골프공(백색 원)이 나타나 있고, 우측 영상에는 골프공에 대응하는 부분의 명도값이 명도 레벨의 임계값인 수평 라인보다 높게 나타나 있다. 또한 도 10c의 좌측 영상은 활성 CCD 라인인 수평 라인 상에 위치한 골프공과 극단적으로 눕혀 놓은 샌드 웨지를 촬영한 영상이고, 우측 영상에는 골프공과 샌드 웨지에 대응하는 부분의 명도값이 명도 레벨의 임계값보다 높게 나타나 있다. 도 10c에서 골프공의 명도폭이 샌드 웨지의 명도폭보다 좁음을 알 수 있다. 마지막으로 도 10d의 좌측 영상은 활성 CCD 라인인 수평 라인 상에 위치한 골프공과 극단적으로 눕혀 놓은 샌드 웨지를 촬영한 영상이고, 우측 영상에는 골프공에 대응하는 부분의 명도값이 명도 레벨의 임계값보다 높은 반면 샌드 웨지에 대응하는 부분의 명도값은 명도 레벨의 임계값보다 낮게 나타나 있다. The left image of FIG. 10A shows a golf ball (white circle) and A4 paper (white square) located on a horizontal line as an active CCD line, and the brightness value of the portion corresponding to the golf ball and A4 paper is the brightness level. Higher than the threshold is shown. In addition, the left image of FIG. 10B shows a golf ball (white circle) located on the active scan line, and the right image shows the brightness value of the portion corresponding to the golf ball higher than the horizontal line which is the threshold of the brightness level. In addition, the left image of FIG. 10C is an image of a golf ball positioned on a horizontal line, which is an active CCD line, and an extremely laid sand wedge. In the right image, a brightness value of a portion corresponding to the golf ball and the sand wedge is a threshold of brightness level. Higher. It can be seen from FIG. 10c that the brightness of the golf ball is narrower than that of the sand wedge. Lastly, the left image of FIG. 10D is an image of a golf ball positioned on a horizontal line, which is an active CCD line, and an extremely deep sand wedge. In the right image, the brightness value of the portion corresponding to the golf ball is greater than the threshold of the brightness level. While high, the brightness value of the portion corresponding to the sand wedge is lower than the threshold of the brightness level.
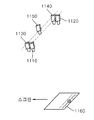
촬영부(220)는 영상획득부(240)로부터 입력되는 트리거 신호에 기초하여 골프공을 촬영한 후 촬영한 영상 신호를 영상획득부(240)에 제공한다. 도 11에는 촬영부(200)의 구체적인 구성예가 도시되어 있다. 도 11을 참조하면, 촬영부(220)는 4개의 에리어 카메라(1110, 1120, 1130, 1140)로 구성된다. 4개의 에리어 카메라(1110, 1120, 1130, 1140)는 영상획득영역(1160)과 스크린 사이의 천정에 2열로 설치된다. 4개의 에리어 카메라(1110, 1120, 1130, 1140)의 셔터속도는 1/25000의 고속으로 설정된다. The photographing
이때 각각의 열에 배치된 복수의 카메라에는 동일한 트리거 신호가 입력된다. 예를 들어, 제1열에 4개의 에리어 카메라(1110, 1120, 1130, 1140) 중 제1에리어 카메라(1110)와 제2에리어 카메라(1120)가 설치되고, 제2열에 제3에리어 카메라(1130)와 제4에리어 카메라(1140)가 설치되면, 영상획득영역(1160)과 가까운 제1열에 설치된 제1에리어 카메라(1110)와 제2에리어 카메라(1120)에 첫번째 트리거 신호가 동시에 입력되고, 영상획득영역(1160)과 먼 제2열에 설치된 제3에리어 카메라(1130)와 제4에리어 카메라(1140)에 두번째 트리거 신호가 동시에 입력된다. 4개의 에리어 카메라(1110, 1120, 1130, 1140) 중앙 지점에는 트리거 신호 생성부(210)로 기능하는 에리어 카메라(1150)가 배치된다. 한편, 제1에리어 카메라(1110)로부터 영상획득영역까지의 거리와 제2에리어 카메라(1120)로부터 영상획득영역까지의 거리는 동일하게 설정된다. 그리고 제3에리어 카메라(1130)로부터 영상획득영역(1160)까지의 거리와 제4에리어 카메라(1140)로부터 영상획득영역(1160)까지의 거리 역시 동일하게 설정된다. 나아가 촬영부(220)에 구비된 4개의 에리어 카메라(1110, 1120, 1130, 1140)의 영상획득영역(1160)이 일치되도록 설정되는 것이 바람직하다. At this time, the same trigger signal is input to a plurality of cameras arranged in each column. For example, the
이와 같이 구성된 촬영부(220)에 의한 촬영과정을 설명하면 다음과 같다. 먼저, 트리거 신호 생성부(210)로부터 출력된 첫번째 트리거 신호가 영상 획득부(240)에 구비된 프레임 그래버를 거쳐 제1열에 배치된 제1에리어 카메라(1110)와 제2에리어 카메라(1120)에 동시에 입력되면, 제1에리어 카메라(1110)와 제2에리어 카메라(1120)는 각각 영상을 촬영하여 영상 획득부(240)에 구비된 프레임 그래버로 출력한다. 다음으로, 트리거 신호 생성부(210)로부터 출력된 두번째 트리거 신호가 영상 획득부(240)에 구비된 프레임 그래버를 거쳐 제2열에 배치된 제3에리어 카메라(1130)와 제4에리어 카메라(1140)에 동시에 입력되면, 제3에리어 카메라(1130)와 제4에리어 카메라(1140)는 각각 영상을 촬영하여 영상 획득부(240)에 구비된 프레임 그래버로 출력한다. 도 12a 내지 도 12c에는 각각 트리거 신호 생성부(210)에 구비된 에리어 카메라(1150)에 의한 영상촬영, 제1열에 배치된 제1에리어 카메라(1110)와 제2에리어 카메라(1120)에 의한 영상촬영, 및 제2열에 배치된 제3에리어 카메라(1130)와 제4에리어 카메라(1140)에 의한 영상촬영 과정이 도시되어 있다.The photographing process by the photographing
한편 촬영부(220)에 2.5 msec 이내에 두장 이상의 영상을 촬영할 수 있는 성능을 가진 채용되는 에리어 카메라가 채용되는 경우에는 트리거 신호 생성부(210)의 좌우에 각각 한 대씩 총 두 대의 에리어 카메라만 설치할 수 있다. 이와 같이 촬영부(220)를 구성하는 경우에도 두 대의 에리어 카메라의 촬영영역은 동일하게 형성되며, 각각의 트리거 신호는 동시에 두 대의 에리어 카메라로 입력된다. On the other hand, when the area camera is adopted in the photographing
조명부(230)는 조도가 일정하게 유지되는 지속광을 방출하는 조명기구로 구성된다. 조명부(230)를 구성하는 조명기구는 촬영부(220)에 인접하여 설치되며, 따라서 제1에리어 카메라(1110)와 제4에리어 카메라(1120)의 외측과 제2에리어 카메라(1120)와 제3에리어 카메라(1130)의 외측에 각각 설치된다. 조명부(230)를 구성하는 조명기구는 영상촬영영역(1160) 보다 큰 영역을 비출 수 있는 광퍼짐 각도를 가지는 것이 바람직하며, 영상촬영영역(1160)에서의 최소 조도는 약 5000Lux 이상을 유지하는 것이 바람직하다. The
영상획득부(240)는 트리거 신호 생성부(210)로부터 입력된 트리거 신호를 촬영부(220)에 제공하고, 촬영부(220)로부터 입력된 영상을 저장하거나 정보측정부(250)에 제공한다. 이러한 영상획득부(240)는 프레임 그래버로 구성되며, 촬영부(220)에 대한 동기신호 제공, 트리거 신호 제공, 영상변환, 영상저장 등의 기능을 수행한다. 먼저, 영상획득부(240)는 촬영부9220)에 구비된 카메라들에 동기신호를 제공한다. 다음으로, 트리거 신호 생성부(210)로부터 첫번째 트리거 신호가 입력되면 제1에리어 카메라(1110)와 제2에리어 카메라(1120)에 동시에 트리거 신호를 제공하고, 트리거 신호 생성부(210)로부터 두번째 트리거 신호가 입력되면 제3에리어 카메라(1130)와 제4에리어 카메라(1140)에 동시에 트리거 신호를 제공한다. 마지막으로 영상획득부(240)는 각각의 카메라로부터 입력된 영상을 디지털 영상으로 변환한 후 저장한다. 이때 촬영부(220)로부터 입력된 영상은 프레임 그래버에 의해 디지털 영상으로 변환된 후 프레임 그래버에 구비된 저장매체 또는 외부의 저장매체에 저장된다. 그리고 저장된 디지털 영상은 정보측정부(250)로 입력된다. The
정보측정부(250)는 인스톨되어 있는 영상처리 프로그램을 구동하여 영상획득부(240)로부터 제공된 디지털 영상으로부터 공간상에서 골프공의 비행정보(즉, 비행속도, 비행방향, 회전속도, 회전축 등)를 산출한다. 먼저 정보측정부(250)는 각각의 디지털 영상으로부터 골프공의 중심을 검출하고, 스테레오 캘리브레이션 기술에 의해 첫번째 촬영시점과 두번째 촬영시점 각각에 대응하여 공간에서의 골프공의 위치와 골프공의 표면에 표시된 점의 위치를 검출한다. 다음으로, 정보측정부(250)는 첫번째 촬영시점과 두번째 촬영시점 각각에 대응하여 검출된 공간상에서의 골프공의 위치 및 골프공의 표면에 표시된 점의 위치를 기초로 골프공의 속도, 진행방향, 회전속도, 회전각도 등의 비행정보를 산출한다. 그리고 부가적으로 정보측정부(250)는 골프공의 비행정보로부터 항력, 회전 등이 고려된 운동방정식의 해를 구하여 골프공의 궤적을 계산할 수 있다. The
이러한 정보측정부(250)에 의한 골프공의 비행정보를 산출하는 과정에서 필요한 기술은 공간 상의 위치를 파악하기 위한 스테레오 캘리브레이션 기술과 골프공의 회전정보 산출 기술이다. 이하에서는 본 발명에서 이용되는 스테레오 캘리브레이션 기술과 골프공의 회전정보 산출 기술에 대해 상세하게 설명한다.The necessary technology in the process of calculating the flight information of the golf ball by the
스테레오 캘리브레이션 기술은 두 개 이상의 다른 위치의 영상을 이용하여 얻은 정보를 이용하여 공간상의 정확한 위치를 측정하는 기법이다. 정보측정부(250)는 이러한 스테레오 캘리브레이션 기술에 의해 골프공의 공간상의 위치와 회전량을 계산한다. 도 13a는 스테레오 캘리브레이션 기술의 원리를 도시한 도면이다. 도 13a를 참조하면, 스테레오 캘리브레이션에 의해 공간 상의 위치 M점을 인식하기 위해 두 대의 카메라(1310, 1320)가 필요하다. 이러한 두 대의 카메라(1310, 1320)의 설치정보(두 카메라의 공간 상의 좌표 Ocl, Ocr, 두 카메라 사이의 거리 T-기준선의 길이, 두 카메라의 촛점거리를 중심으로 두 카메라 사이의 각도 R 등)가 주어져 있을 때, 두 대의 카메라(1310, 1320)에 의해 촬영된 각각의 영상(1315, 1325)에서 공간 상의 위치 M점에 대응하는 점인 ml과 mr로부터 M점의 공간 상의 위치를 알 수 있다. 스테레오 캘리브레이션은 두 단계로 구성된다. 먼저 각각의 카메라(1310, 1320)가 촬영한 두 개의 영상 사이에서 3차원 공간상에서 동일한 점을 나타내는 대응점을 검색한다. 이와 같이 두 개의 영상에서 대응되는 점을 검색하는 과정을 통상 영상일치(image matching)라 한다. 다음으로 주어진 3차원 점의 좌표가 카메라 중심으로 투영되는 광선들과 각각의 영상에 대응되는 점의 교차라는 관점에서 3차원 구조를 복원한다. 이러한 과정을 3차원 구조 복원(reconstruction)이라 한다. Stereo calibration is a technique for measuring the exact position in space using information obtained from images of two or more different positions. The
이러한 스테레오 캘리브레이션 기술을 적용하기 위해서는 우선 좌우 두대의 카메라에 대한 카메라 캘리브레이션이 선행되어야 한다. 카메라 캘리브레이션은 공간상에 위치한 3차원의 점 M과 그 점이 카메라 이미지상에 표현된 2차원의 점 m과의 관계식을 구하는 과정으로 기술되며, 이는 다음의 수학식으로 표현된다. In order to apply the stereo calibration technology, camera calibration for two cameras must be preceded. Camera calibration is described as a process of obtaining a relation between a three-dimensional point M located in space and a two-dimensional point m expressed in the camera image, which is expressed by the following equation.
![]()
![]()
여기서, ![]()
![]()
![]()
![]()
카메라 캘리브레이션은 보통 공간상의 위치를 알고 있는 표식점들이 부착되어 있는 캘리브레이션 도구를 이용하여 수행된다. 이때 3차원 영상 복원이 필요한 곳에 캘리브레이션 도구를 위치한 후 카메라로 캘리브레이션 도구의 이미지를 획득하여, 캘리브레이션 도구상에 위치한 표식점의 위치와 이미지 상의 표식점의 위치를 이용하여 카메라 변환행렬을 구한다. 도 13b에는 현재 사용중인 카메라 캘리브레이션 도구가 도시되어 있다. 도 13b를 참조하면, 검은원이 표식점이며 검은원의 중심좌표를 사용하여 카메라 캘리브레이션을 수행한다. 표식점은 서로 다른 공간상에 위치한 6개 이상이 필요하며, 3차원 영상 복원이 필요한 영역에 고르게 분포하는 것이 정확도 면에서 유리하다. 또한 표식점 좌표의 오차는 3차원 영상 복원에 의해 구한 공간상 좌표의 오차에 직접적인 영향을 미치므로 최대 0.1mm 이내이어야 한다. 이상에서 설명한 스테레오 캘리브레이션 기법 및 카메라 캘리브레이션은 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자라면 익히 알 수 있는 사항이므로 보다 상세한 설명은 생략한다.Camera calibration is usually performed using a calibration tool with marker points that know the location in space. At this time, after the calibration tool is placed where the 3D image needs to be restored, an image of the calibration tool is acquired by the camera, and the camera transformation matrix is obtained by using the position of the marker point located on the calibration tool and the position of the marker point on the image. 13B shows the camera calibration tool currently in use. Referring to FIG. 13B, a black circle is a mark point and camera calibration is performed using the center coordinates of the black circle. Six or more marker points are needed in different spaces, and it is advantageous in terms of accuracy that they are distributed evenly in the area requiring 3D image reconstruction. In addition, the error of marker coordinates should be within 0.1mm maximum because it directly affects the error of spatial coordinates obtained by 3D image reconstruction. The stereo calibration technique and the camera calibration described above are well known to those skilled in the art to which the present invention pertains, and thus detailed descriptions thereof will be omitted.
한편 본 발명에서 골프공의 회전정보는 골프공에 인쇄된 특정한 패턴을 기초로 산출된다. 종래의 골프공의 회전정보를 산출하는 방법 중 하나는 골프공의 표면에 골프공의 중심을 원의 중앙으로 하고 골프공의 표면상의 두 점을 교차점으로 갖는 복수개의 마커라인을 인쇄한 후 카메라로 고속촬영하여 골프공의 회전정보를 산 출하는 방법을 취하고 있다. 그러나 이러한 방법은 골프공의 회전각도가 120° 이상이 되면 골프공의 회전방향을 판단할 수 없기 때문에 골프공이 120˚ 이상 회전하기 전에 두 개의 영상을 촬영하여야 한다. 또한 종래의 골프공의 회전정보를 산출하는 방법 중 또 다른 하나는 골프공의 표면에 복수개의 점을 인쇄한 후 카메라로 고속촬영하여 골프공의 회전정보를 산출하는 방법을 취하고 있다. 그러나 이러한 방법 역시 은 골프공의 회전각도가 180° 이상이 되면 골프공의 회전방향을 판단할 수 없기 때문에 골프공이 180˚ 이상 회전하기 전에 두 개의 영상을 촬영하여야 한다. 종래의 골프공 회전정보 산출 방법들은 골프공의 회전각도에 따른 회전방향의 문제를 고려하지 않고 있기 때문에 골프공의 회전각도를 정확하게 측정하기 위해서는 고가의 고속 카메라를 채용해야 하는 문제가 있다. Meanwhile, in the present invention, the rotation information of the golf ball is calculated based on a specific pattern printed on the golf ball. One method of calculating rotation information of a conventional golf ball is to print a plurality of marker lines having the center of the golf ball as the center of the circle and the two points on the surface of the golf ball as intersections on the surface of the golf ball and then using a camera. High speed photography is used to calculate the rotational information of the golf ball. However, this method can not determine the direction of rotation of the golf ball when the rotation angle of the golf ball is more than 120 °, two images must be taken before the golf ball rotates more than 120 °. Another method of calculating the rotation information of a conventional golf ball is a method of calculating the rotation information of a golf ball by printing a plurality of points on the surface of the golf ball and photographing at high speed with a camera. However, this method also needs to take two images before the golf ball rotates more than 180 ° because the direction of rotation of the golf ball cannot be determined when the rotation angle of the golf ball is more than 180 °. Since conventional golf ball rotation information calculation methods do not consider the problem of the rotation direction according to the rotation angle of the golf ball, there is a problem that an expensive high speed camera must be employed to accurately measure the rotation angle of the golf ball.
이와 달리 본 발명에서는 트리거 신호를 생성하는 트리거 신호 생성부(210)가 골프공의 최대 비행속도 및 최대 회전속도를 고려하여 첫번째 트리거 신호를 출력한 후 골프공이 180˚ 이상 회전하기 전에 두번째 트리거 신호를 출력하여 골프공의 정확한 회전정보를 측정할 수 있도록 한다. 나아가 본 발명은 골프공을 어떠한 방향에서 바라보더라도 서로 상이하게 되도록 마킹패턴이 표면에 인쇄된 골프공을 이용하여 골프공의 회전정보를 측정한다. 이러한 마킹패턴은 점 또는 선으로 이루어질 수 있다. In contrast, in the present invention, after the
마킹패턴이 점으로 이루어진 경우에 도 14a에 도시된 바와 같이 임의로 세개의 점을 선택하여 만들어진 각각의 삼각형들이 모두 상이하게 되도록(즉, 삼각형의 모양 또는 크기가 상이하게 되도록) 골프공의 표면에 마킹점이 인쇄된다. 이와 같 이 마킹점을 이용할 경우에는 골프공의 표면을 8개의 영역으로 균등분할한 후 각각의 분할된 영역에 3개 이상의 점을 서로 다른 배치구조를 갖도록 인쇄하는 방법이 적용될 수 있다. 또한 마킹패턴이 점으로 이루어진 경우에 도 14b에 도시된 바와 같이 골프공의 상반구와 하반구에 각각 축은 일치하고 직경이 서로 다른 가상의 원 상에 마킹점을 인쇄할 수도 있다. 이때 각각의 가상의 원상에 인쇄되는 마킹점들은 각각의 가상의 원을 4등분하여 이루어진 호 중에서 서로 마주보는 호에는 서로 다른 개수 또는 간격으로 마킹점이 배치되어야 한다. 마킹패턴을 점으로 형성할 경우에는 영상 처리가 용이하고, 점의 중심의 계산만으로 스테레오 캘리브레이션 기법에 의해 공간상의 위치를 곧바로 알 수 있는 이점이 있다. 또한 다양한 패턴의 인쇄가 용이하며, 다수의 점을 인쇄함으로써 빛의 산란에 의해 선명하지 않게 촬영된 점이 일부 존재하는 경우에도 나머지 점들에 의해 회전정보를 계산할 수 있는 이점이 있다. In the case where the marking pattern is made of points, markings are made on the surface of the golf ball so that each triangle made by selecting three points arbitrarily as shown in FIG. 14A is all different (ie, shapes or sizes of triangles are different). Dots are printed. In this case, when the marking point is used, a method of dividing the golf ball surface into eight areas and then printing three or more points on each divided area to have a different arrangement structure may be applied. In addition, in the case where the marking pattern is made of dots, marking points may be printed on imaginary circles coincident with axes and having different diameters in the upper and lower hemispheres of the golf ball, as shown in FIG. 14B. In this case, the marking points printed on the virtual circles should be arranged at different numbers or intervals in arcs facing each other among arcs formed by dividing each virtual circle into quarters. In the case of forming the marking pattern as a dot, image processing is easy and there is an advantage that the position in space can be immediately known by the stereo calibration technique only by calculating the center of the dot. In addition, it is easy to print a variety of patterns, and by printing a plurality of points there is an advantage that the rotation information can be calculated by the remaining points even if there are some points that are not clearly captured by light scattering.
한편 마킹패턴이 선으로 이루어진 경우에 도 14c에 도시된 바와 같이 골프공의 중심을 원의 중앙으로 하는 제1원이 골프공의 표면에 인쇄되고, 제1원보다 직경이 작은 제2원이 제1원과 교차되지 않도록 골프공의 표면에 인쇄된다. 또한 마킹패턴이 선으로 이루어진 경우에 도 14d에 도시된 바와 같이 골프공의 상반구와 하반구에 각각 직경이 서로 다른 원을 인쇄할 수도 있다. 이러한 방식으로 골프공의 표면에 원을 인쇄하면 골프공을 어떠한 방향에서 바라보더라도 서로 상이한 패턴이 보여지게 된다. 이상과 같은 마킹패턴들은 사용자가 인식할 수 없도록 적외선 도료에 의해 인쇄될 수 있으며, 이 경우 상술한 카메라들은 모두 적외선 카메라로 변경 되거나 적외선 영역에서 높은 감도를 갖는 카메라가 채용되어야 한다. 아울러 골프공의 표면에 인쇄되는 마킹패턴은 이 밖에도 다양한 방법이 존재하며, 골프공을 어떠한 방향에서 바라보더라도 서로 상이한 패턴이 보여지도록 하는 조건만을 만족한다면 본 발명의 범주에 포함됨은 당연하다. On the other hand, when the marking pattern consists of lines, as shown in FIG. 14C, a first circle having the center of the golf ball as the center of the circle is printed on the surface of the golf ball, and a second circle having a diameter smaller than the first circle is formed. It is printed on the surface of the golf ball so that it does not intersect one circle. In addition, when the marking pattern consists of lines, circles having different diameters may be printed on the upper and lower hemispheres of the golf ball, respectively, as shown in FIG. 14D. Printing a circle on the surface of the golf ball in this manner will show a different pattern to the golf ball in any direction. Marking patterns as described above can be printed by the infrared paint so that the user can not recognize, in this case, all of the above-described cameras should be changed to an infrared camera or a camera having a high sensitivity in the infrared region. In addition, there are various methods for marking patterns printed on the surface of the golf ball, and it is natural that the marking pattern is included in the scope of the present invention as long as it satisfies the condition that different patterns are seen from the golf ball in any direction.
이하에서는 본 발명에서 채용하는 골프공의 회전정보 측정기법에 대해 상세하게 설명한다. Hereinafter, a method of measuring rotation information of a golf ball employed in the present invention will be described in detail.
본 발명에서는 골프공의 회전정보를 계산하기 위해서 4대의 카메라(1110, 1120, 1130, 1140)를 이용하여 각각의 트리거 신호가 입력되는 시점에 동일열에 배치된 두 대의 카메라(1110과 1120, 1130과 1140)에 의해 촬영된 영상에 존재하는 골프공의 표면에 인쇄된 점의 패턴을 분석하여 공의 회전을 계산한다. 즉, 골프공을 감지한 트리거 신호 생성부(210)에 의해 생성된 첫번째 트리거 신호가 제1에리어 카메라(1110)와 제2에리어 카메라(1120)로 입력되는 순간에 제1에리어 카메라(1110)와 제2에리어 카메라(1120)가 골프공의 영상을 촬영하고, 첫번째 트리거 신호의 생성 시점으로부터 일정한 시간이 경과된 시점에 트리거 신호 생성부(210)에 의해 생성된 두번째 트리거 신호가 제3에리어 카메라(1130)와 제4에리어 카메라(1140)로 입력되는 순간에 제3에리어 카메라(1130)와 제4에리어 카메라(1140)가 골프공의 영상을 촬영한다. In the present invention, using the four
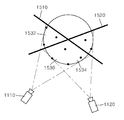
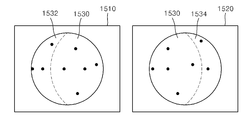
도 15a 내지 도 15d에는 제1에리어 카메라(1110) 및 제2에리어 카메라(1120)가 촬영한 영상 내의 골프공 영상으로부터 골프공의 회전정보를 산출하는 과정이 도시되어 있다. 도 15a 내지 도 15b를 참조하면, 두 대의 에리어 카메라(1110, 1120)는 일정한 거리를 두고 배치되어 있으므로, 각각의 카메라(1110, 1120)가 촬영한 영상은 서로 달라지게 된다. 이때 골프공의 표면 영역은 골프공을 바라볼 때 좌측에 위치한 제1에리어 카메라(1110)가 촬영한 골프공 영상(1510)과 우측에 위치한 제2에리어 카메라(1120)가 촬영한 골프공 영상(1520)에 모두 촬영되는 영역(1530), 제1에리어 카메라(1110)가 촬영한 골프공 영상(1510)에만 촬영되는 영역(1532), 그리고 제2에리어 카메라(1120)가 촬영한 골프공 영상(1510)에만 촬영되는 영역(1534)이 존재하게 된다. 이는 제3에리어 카메라(1130) 및 제4에리어 카메라(1140)에 의해 각각 촬영된 골프공 영상도 동일하다.15A to 15D illustrate a process of calculating rotation information of a golf ball from a golf ball image in an image captured by the
정보측정부(250)는 첫번째 열에 배치된 두 대의 카메라(1110, 1120)에 의해 동시에 촬영된 각각의 골프공 영상에서 공통되는 영역(1530)에 존재하는 마킹점들에 대해 스테레오 캘리브레이션 기법을 적용하여 3차원 공간 상의 좌표를 산출한다. 또한 정보측정부(250)는 제1에리어 카메라(1110)와 제2에리어 카메라(1120)에 동시에 촬영되지 않은 영역(1532, 1534)에 존재하는 마킹점들의 공간 좌표를 골프공의 구 방정식과 카메라의 위치정보를 이용하여 계산한다. 도 15c에는 첫번째 트리거 신호에 대응하는 골프공에 대해 검출된 마킹점들이 도시되어 있다. The
다음으로 정보측정부(250)는 사전에 저장되어 있는 참조 패턴 데이터 중에서 서로 다른 시점(View Point)에서 촬영된 골프공 영상으로부터 얻어진 골프공의 마킹점에 대한 공간 좌표들 중에서 사전에 설정된 개수(예를 들면, 3개)만큼의 마킹점으로 이루어진 형상(1540)과 동일한 참조 패턴(1542)을 검출한다. 이때 참조 패턴 데이터는 골프공의 중심을 3차원 좌표 상의 원점에 위치시킨 후 얻어진 골프공 의 표면에 인쇄된 마킹점들에 의해 형성될 수 있는 임의의 다각형(만약, 사전에 설정된 개수가 3개이면 삼각형)을 구성하는 마킹점들의 좌표이다. Next, the
다음으로 정보측정부(250)는 사전에 설정된 개수만큼의 선택된 마킹점을 동일한 참조 패턴(1542)과 일치시키기 위한 변환행렬(롤각(roll angle), 요각(yaw angle) 및 피치각(pitch angle)의 변화량을 인자로 하는 행렬)을 산출한다. 이때 정확한 회전정보를 산출하기 위해서는 공통되는 영역(1530)에 존재하는 마킹점은 적어도 5개 이상 필요하며, 정보측정부(250)는 공통되는 영역(1530)에 존재하는 마킹점 중에서 최소한 5개의 마킹점을 선택한 후 이들 선택된 마킹점들로 구성할 수 있는 삼각형 형상 10개 각각에 대해 참조 패턴의 검출 및 변환행렬의 산출과정을 반복한다. 만약 공통되는 영역(1530)에 존재하는 마킹점이 5개 미만이면, 각각의 골프공 영상(1510, 1520)에만 존재하는 영역(1532, 1534) 중에서 추가적인 마킹점을 선택하여 최소한 5개의 마킹점이 선택되도록 한다. 공통되는 영역(1530)에 존재하는 마킹점을 우선적으로 선택하는 이유는 이러한 마킹점들은 두 개의 카메라(1110, 1120)에 의해 모두 촬영된 마킹점의 공간상의 좌표가 보다 정확하기 때문이다. 이와 같이 반복적으로 산출된 10개의 변환행렬 중에서 다음의 수학식에 의해 산출되는 오차값이 최소인 변환행렬을 첫번째 트리거 신호에 대응하는 골프공의 제1변환행렬로 결정한다. Next, the

여기서, Di는 n개의 마킹점 중에서 임의로 선택된 3개의 마킹점 각각의 3차원 공간 상에서의 좌표값과 임의로 선택된 3개의 마킹점에 대해 산출된 변환행렬에 의해 나머지 2개의 마킹점을 변환하여 얻은 2차원 공간 상에서의 좌표값 각각에 대해 대응하는 검출된 참조 패턴을 구성하는 마킹점 사이의 거리로서 다음의 수학식으로 표현된다.Here, Di is a two-dimensional obtained by transforming the remaining two marking points by a coordinate matrix calculated in three-dimensional space of each of three randomly selected marking points among n marking points and a transformation matrix calculated for the three randomly selected marking points. The distance between the marking points constituting the corresponding detected reference pattern for each coordinate value in space is represented by the following equation.
![]()
![]()
여기서, Px,y,z[i]는 각 마킹점의 좌표값이고, Prx,y,z[Idx[j]]는 각각 Px,y,z[i]에 대응하는 참조 패턴의 마킹점의 좌표값이다. Here, P x, y, z [i] is the coordinate value of each marking point, and Pr x, y, z [Idx [j]] is the marking of the reference pattern corresponding to P x, y, z [i] , respectively. The coordinate value of the point.
이때 제1변환행렬을 결정하는 방법은 반복적으로 산출된 변환행렬의 평균값을 취하는 방법, 오차값이 일정한 범위 내에 존재하는 변환행렬의 평균을 취하는 방법 등 다양한 방법이 채용될 수 있다. 그리고 정보측정부(250)는 제1변환행렬로부터 첫번째 트리거 신호에 대응하는 골프공의 회전각도(즉, 롤각, 요각 및 피치각)를 산출한다. 이상의 과정을 통해 첫번째 트리거 신호에 의해 촬영된 골프공 영상으로부터 골프공의 회전정보를 나타내는 제1변환행렬 MAR이 결정되면, 정보검출 부(250)는 두번째 트리거 신호에 대응하여 제3에리어 카메라(1130)와 제4에리어 카메라(1140)에 의해 촬영된 영상으로부터 골프공의 회전정보를 나타내는 제2변환행렬 MBR을 결정한다. In this case, various methods may be employed as a method of determining the first transform matrix, such as a method of taking an average value of a repeatedly calculated transform matrix or a method of taking an average of a transform matrix having an error value within a predetermined range. The
도 16a 내지 도 16c에는 정보측정부(250)가 제2변환행렬을 결정하는 과정이 도시되어 있다. 도 16a 내지 도 16c를 참조하면, 정보측정부(250)는 두번째 열에 배치된 두 대의 카메라(1130, 1140)에 의해 동시에 촬영된 각각의 골프공 영상에서 공통되는 영역(1630)에 존재하는 마킹점들에 대해 스테레오 캘리브레이션 기법을 적용하여 3차원 공간 상의 좌표를 산출한다. 이때 정보측정부(250)는 제3에리어 카메라(1130)와 제4에리어 카메라(1140)에 동시에 촬영되지 않은 영역(1632, 1634)에 존재하는 마킹점들의 공간 좌표를 골프공의 구 방정식과 카메라의 위치정보를 이용하여 계산한다. 다음으로 정보측정부(250)는 첫번째 트리거 신호에 대응하여 촬영된 영상에 대한 처리과정과 동일하게 사전에 저장되어 있는 참조 패턴 데이터 중에서 서로 다른 시점(View Point)에서 촬영된 골프공 영상으로부터 얻어진 골프공의 마킹점에 대한 공간 좌표들 중에서 사전에 설정된 개수(예를 들면, 3개)만큼의 마킹점으로 이루어진 형상(1640)과 동일한 참조 패턴(1642)을 검출한다. 이때 도 16b에 도시된 바와 같이 공통되는 영역(1630)에 존재하는 마킹점이 4개이므로, 각각의 골프공 영상(1610, 1620)에만 존재하는 영역(1632, 1634) 중에서 제3에리어 카메라(1130)가 촬영한 골프공 영상에만 존재하는 영역(1632)에서 추가적인 마킹점을 선택하여 최소한 5개의 마킹점이 선택되도록 한다. 다음으로 정보측정부(250)는 선 택된 5개의 마킹점들로 구성할 수 있는 삼각형 형상 10개 각각에 대해 참조 패턴의 검출 및 변환행렬의 산출과정을 반복한다. 정보측정부(250)는 이와 같이 반복적으로 산출된 10개의 변환행렬 중에서 최소 오차값을 갖는 변환행렬을 두번째 트리거 신호에 대응하는 제2변환행렬 MBR로 결정한다. 16A to 16C illustrate a process in which the
이상의 과정을 통해 첫번째 트리거 신호 및 두번째 트리거 신호에 의해 촬영된 골프공 영상으로부터 골프공의 회전정보를 나타내는 제1변환행렬 MAR과 제2변환행렬 MBR이 결정되면, 정보측정부(250)는 다음의 수학식에 의해 첫번째 트리거 신호에 촬영된 영상 내의 골프공에 대한 변환행렬 MAR과 두번째 트리거 신호에 촬영된 영상 내의 골프공에 대한 변환행렬 MBR로부터 최종적인 변환행렬 MAB를 산출한다.When the first transformation matrix M AR and the second transformation matrix M BR indicating the golf ball rotation information are determined from the golf ball image captured by the first trigger signal and the second trigger signal through the above process, the
![]()
![]()
정보측정부(250)는 수학식 7에 의해 얻어진 최종적인 변환행렬로부터 두 촬영시점 사이에 이루어진 골프공의 회전정보(회전속도 및 회전축)를 산출한다. 그리고 부가적으로 정보측정부(250)는 주어진 환경변수와 산출된 골프공의 비행정보 및 회전정보를 이용하여 골프공의 비행궤적과 바운딩 정보를 산출할 수 있다. 이때 환경변수에는 홀 전체의 지형정보(페어웨이, 러프 등과 같은 지형종류, 지형의 밀도, 지형의 경사도 등), 골프공이 비행하는 대기정보(습도, 공기밀도, 바람방향, 바람세기, 항력계수, 양력계수 등) 등이 포함된다. The
도 17은 본 발명에 따른 구형 물체의 비행정보 측정 방법에 대한 바람직한 실시예의 수행과정을 도시한 흐름도이다. 17 is a flowchart illustrating a process of performing a preferred embodiment of the method for measuring flight information of a spherical object according to the present invention.
도 17을 참조하면, 트리거 신호 생성부(210)는 활성 CCD 라인에 의해 촬영된 영상으로부터 골프공이 검출되면 제1트리거 신호를 생성하여 영상획득부(230)로 출력한다(S1800). 영상획득부(240)는 촬영부(220)를 구성하는 2열로 배치된 4개의 에리어 카메라 중에서 제1열에 위치하는 제1에리어 카메라(1110)와 제2에리어 카메라(1120)에 동시에 제1트리거 신호를 제공한다(S1810). 제1에리어 카메라(1110)와 제2에리어 카메라(1120)는 제1트리거 신호가 입력되면 동일한 영상획득영역을 촬영하여 각각 제1영상 및 제2영상을 영상획득부(240)로 출력한다(S1820). 도 18a에는 제1트리거 신호에 대응하는 제1영상 및 제2영상이 도시되어 있다. 다음으로 트리거 신호 생성부(210)는 제1트리거 신호를 출력한 시점으로부터 사전에 설정된 시간 간격(예를 들면, 2.5 msec)이 경과한 후 제2트리거 신호를 생성하여 영상획득부(240)로 출력한다(S1830). 이어서 영상획득부(240)는 촬영부(220)를 구성하는 2열로 배치된 4개의 에리어 카메라 중에서 제2열에 위치하는 제3에리어 카메라(1130)와 제4에리어 카메라(1140)에 동시에 제2트리거 신호를 제공한다(S1840). 제3에리어 카메라(1130)와 제4에리어 카메라(1140)는 제2트리거 신호가 입력되면 동일한 영상획득영역을 촬영하여 각각 제3영상 및 제4영상을 영상획득부(240)로 출력한다(S1850). 도 18b에는 제2트리거 신호에 대응하는 제3영상 및 제4영상이 도시되어 있다.Referring to FIG. 17, when a golf ball is detected from an image captured by an active CCD line, the
정보측정부(250)는 제1영상과 제2영상, 그리고 제3영상과 제4영상에 대해 각각 스테레오 캘리브레이션 기법을 적용하여 제1트리거 신호 및 제2트리거 신호에 대응하는 골프공의 공간상의 위치를 산출한다(S1860). 정보측정부(250)는 산출된 골프공의 공간상의 위치를 기초로 골프공의 속도, 발사각도, 이탈각도를 산출한다(S1870). 다음으로 정보측정부(250)는 제1영상 내지 제4영상에 대해 영상처리(잡음제거, 경계검출 등)를 수행한 후 골프공 부분을 확대하여 제1골프공 영상 내지 제4골프공 영상을 얻는다(S1880). 도 19에는 영상처리 후 얻어진 골프공 영상의 예가 도시되어 있다. 다음으로 정보측정부(250)는 제1골프공 영상 내지 제4골프공 영상을 기초로 골프공의 회전정보를 산출한다(S1890).The
도 20은 정보측정부(250)에 의한 골프공의 회전정보를 산출하는 과정을 도시한 흐름도이다.20 is a flowchart illustrating a process of calculating rotation information of a golf ball by the
도 20을 참조하면, 정보측정부(250)는 첫번째 열에 배치된 에리어 카메라(1110, 1120)에 의해 촬영된 영상으로부터 얻어진 각각의 골프공 영상 내의 마킹점들에 대해 전술한 스테레오 캘리브레이션 기법을 적용하여 공간 상의 좌표를 산출한다(S2100). 다음으로 정보측정부(250)는 제1에리어 카메라(1110)와 제2에리어 카메라(1120)에 동시에 촬영되지 않은 마킹점들의 공간 좌표를 골프공의 구 방정식과 카메라의 위치정보를 이용하여 계산한다(S2110). 다음으로 정보측정부(250)는 제1에리어 카메라(1110)와 제2에리어 카메라(1120)에 동시에 촬영된 마킹점의 개수가 사전에 설정된 기준개수(예를 들면, 5개) 이상이면(S2120), 해당 마킹점 중에서 5개의 마킹점을 선택한다(S2130). 만약 제1에리어 카메라(1110)와 제2에리어 카메라(1120)에 동시에 촬영된 마킹점의 개수가 사전에 설정된 기준개수(예를 들면, 5개) 미만이면(S2120), 제1에리어 카메라(1110) 또는 제2에리어 카메라(1120)에 의 해서만 촬영된 마킹점들 중에서 부족한 개수의 마킹점을 선택하여 추가한다(S2140). 다음으로 정보측정부(250)는 참조 패턴 데이터 중에서 선택된 5개의 마킹점 중에서 3개의 마킹점을 선택하여 만들 수 있는 삼각형 형상들 각각과 동일한 크기와 모양의 삼각형을 검색한다(S2150). 다음으로 정보측정부(250)는 선택된 5개의 마킹점 중에서 3개의 마킹점을 선택하여 만들 수 있는 삼각형 형상들 각각을 참조 패턴 데이터 중에서 검출된 참조 패턴과 일치시키기 위한 각각의 변환행렬들(MAR1 내지 MAR10)을 산출하고, 산출된 제1변환행렬들 중에서 수학식 5로 표현되는 오차값이 최소가 되도록 하는 변환행렬을 제1트리거 신호에 의해 촬영된 골프공 영상으로부터 골프공의 회전정보를 나타내는 최종적인 제1변환행렬 MAR로 결정한다(S2160).Referring to FIG. 20, the
이상에서 설명한 S2100단계 내지 S2160단계는 두번째 열에 배치된 에리어 카메라(1130, 1140)에 의해 촬영된 영상에 대해서도 순차적으로 수행되어 제2변환행렬 MBR을 결정한다(S2170). 다음으로 정보측정부(250)는 수학식 7을 이용하여 제1트리거 신호에 촬영된 영상 내의 골프공에 대한 변환행렬 MAR과 제2트리거 신호에 촬영된 영상 내의 골프공에 대한 변환행렬 MBR로부터 최종적인 변환행렬 MAB를 산출한다(S2180). 다음으로 정보측정부(250)는 수학식 7에 의해 얻어진 최종적인 변환행렬과 각각의 트리거 신호의 시간간격으로부터 두 촬영시점 사이에 이루어진 골프공의 회전정보(회전속도 및 회전축)를 산출한다(S2190). 그리고 부가적으로 정보측정 부(250)는 주어진 환경변수와 산출된 골프공의 비행정보 및 회전정보를 이용하여 골프공의 비행궤적과 바운딩 정보를 산출할 수 있다. 도 21에는 정보측정부(250)에 의해 산출된 골프공의 비행정보 및 회전정보, 그리고 골프공의 비행궤적이 도시되어 있다.Steps S2100 to S2160 described above are sequentially performed on the images photographed by the
본 발명은 또한 컴퓨터로 읽을 수 있는 기록매체에 컴퓨터가 읽을 수 있는 코드로서 구현하는 것이 가능하다. 컴퓨터가 읽을 수 있는 기록매체는 컴퓨터 시스템에 의하여 읽혀질 수 있는 데이터가 저장되는 모든 종류의 기록장치를 포함한다. 컴퓨터가 읽을 수 있는 기록매체의 예로는 ROM, RAM, CD-ROM, 자기 테이프, 플로피디스크, 광데이터 저장장치 등이 있으며, 또한 캐리어 웨이브(예를 들어 인터넷을 통한 전송)의 형태로 구현되는 것도 포함한다. 또한 컴퓨터가 읽을 수 있는 기록매체는 네트워크로 연결된 컴퓨터 시스템에 분산되어 분산방식으로 컴퓨터가 읽을 수 있는 코드가 저장되고 실행될 수 있다.The present invention can also be embodied as computer-readable codes on a computer-readable recording medium. A computer-readable recording medium includes all kinds of recording apparatuses in which data that can be read by a computer system is stored. Examples of the computer-readable recording medium include a ROM, a RAM, a CD-ROM, a magnetic tape, a floppy disk, an optical data storage device, and the like, and may be implemented in the form of a carrier wave (for example, transmission via the Internet) . The computer readable recording medium can also be distributed over network coupled computer systems so that the computer readable code is stored and executed in a distributed fashion.
이상에서 본 발명의 바람직한 실시예에 대해 도시하고 설명하였으나, 본 발명은 상술한 특정의 바람직한 실시예에 한정되지 아니하며, 청구범위에서 청구하는 본 발명의 요지를 벗어남이 없이 당해 발명이 속하는 기술분야에서 통상의 지식을 가진 자라면 누구든지 다양한 변형 실시가 가능한 것은 물론이고, 그와 같은 변경은 청구범위 기재의 범위 내에 있게 된다.While the present invention has been particularly shown and described with reference to exemplary embodiments thereof, it is clearly understood that the same is by way of illustration and example only and is not to be taken by way of limitation in the embodiment in which said invention is directed. It will be understood by those skilled in the art that various changes in form and detail may be made therein without departing from the scope of the appended claims.
도 1은 종래의 구형 물체 비행정보 측정 시스템에서 마킹 패턴이 형성된 골프공을 시간차이를 두고 촬영한 영상을 도시한 도면,1 is a view showing an image taken with a time difference of a golf ball formed with a marking pattern in the conventional spherical object flight information measuring system,
도 2는 본 발명에 따른 구형 물체의 비행정보 측정 시스템에 대한 바람직한 일 실시예의 구성을 도시한 도면, 2 is a view showing the configuration of a preferred embodiment for a flight information measuring system of a spherical object according to the present invention;
도 3은 본 발명에 따른 구형 물체의 비행정보 측정 시스템에 대한 바람직한 일 실시예의 상세한 구성을 도시한 블록도,3 is a block diagram showing a detailed configuration of a preferred embodiment of a flight information measuring system of a spherical object according to the present invention;
도 4는 트리거 신호 생성부에 채용되는 카메라의 상세한 구조를 도시한 도면,4 is a diagram illustrating a detailed structure of a camera employed in a trigger signal generation unit;
도 5는 트리거 신호 생성부에 채용되는 이미지 센서를 구성하는 CCD 라인 중에서 한 개의 CCD 라인을 활성 CCD 라인으로 지정한 예를 도시한 도면,FIG. 5 is a diagram showing an example in which one CCD line is designated as an active CCD line among the CCD lines constituting the image sensor employed in the trigger signal generator; FIG.
도 6a 및 도 6b는 각각 하나의 활성 CCD 라인에 위치한 골프공 및 해당 위치에 존재하는 골프공을 촬영한 디지털 영상신호를 도시한 도면,6A and 6B illustrate a digital image signal photographing a golf ball located on one active CCD line and a golf ball existing at a corresponding position;
도 7은 트리거 신호 생성부에 채용되는 이미지 센서를 구성하는 CCD 라인 중에서 골프공의 진행방향으로 골프공의 직경의 1/2에 상응하는 33개의 CCD 라인을 이미지 스캐닝 윈도우로 설정한 예를 도시한 도면,FIG. 7 illustrates an example in which 33 CCD lines corresponding to one-half of the diameter of a golf ball are set as an image scanning window among the CCD lines constituting the image sensor employed in the trigger signal generator. drawing,
도 8a 및 도 8b는 각각 5개의 활성 CCD 라인으로 구성된 이미지 스캐닝 윈도우 내에 위치한 골프공 및 해당 위치에 존재하는 골프공을 촬영한 디지털 영상신호를 도시한 도면,8A and 8B illustrate a digital image signal photographing a golf ball located in an image scanning window composed of five active CCD lines and a golf ball existing at a corresponding position;
도 9는 트리거 신호 생성부에 채용되는 이미지 센서를 구성하는 CCD 라인 중 에서 세 개의 CCD 라인을 활성 CCD 라인으로 지정한 예를 도시한 도면,FIG. 9 is a diagram showing an example in which three CCD lines are designated as active CCD lines among the CCD lines constituting the image sensor employed in the trigger signal generator; FIG.
도 10a 내지 도 10d는 각각 트리거 신호 생성부에 의해 얻어진 다양한 영상과 활성 CCD 라인 내의 명도값을 도시한 도면,10A to 10D show various images obtained by a trigger signal generation unit and brightness values in active CCD lines, respectively;
도 11은 촬영부의 구체적인 구성예를 도시한 도면,11 is a view showing a specific configuration example of the photographing unit;
도 12a 내지 도 12c는 각각 트리거 신호 생성부에 구비된 에리어 카메라에 의한 영상촬영, 제1열에 배치된 제1에리어 카메라와 제2에리어 카메라에 의한 영상촬영, 및 제2열에 배치된 제3에리어 카메라와 제4에리어 카메라에 의한 영상촬영 과정을 도시한 도면,12A to 12C show image capturing by an area camera provided in a trigger signal generating unit, image capturing by a first area camera and a second area camera disposed in a first column, and a third area camera disposed in a second column, respectively. And a diagram illustrating a video photographing process by a fourth area camera;
도 13a는 스테레오 캘리브레이션 기술의 원리를 도시한 도면,13A illustrates the principle of a stereo calibration technique;
도 13b는 현재 사용중인 카메라 캘리브레이션 도구를 도시한 도면,13B is a diagram showing a camera calibration tool currently in use;
도 14a 내지 도 14d는 각각 골프공의 표면에 인쇄되는 다양한 마킹패턴의 예를 도시한 도면,14A to 14D illustrate examples of various marking patterns printed on the surface of a golf ball, respectively.
도 15a 내지 도 15d는 제1열에 배치된 에리어 카메라에 의해 촬영된 영상으로부터 골프공의 회전벡터를 산출하는 과정을 도시한 도면, 15A to 15D illustrate a process of calculating a rotation vector of a golf ball from an image photographed by an area camera disposed in a first column;
도 16a 내지 도 16c는 제2열에 배치된 에리어 카메라에 의해 촬영된 영상으로부터 골프공의 회전벡터를 산출하는 과정을 도시한 도면, 16A to 16C are views illustrating a process of calculating a rotation vector of a golf ball from an image photographed by an area camera arranged in a second column;
도 17은 본 발명에 따른 구형 물체의 비행정보 측정 방법에 대한 바람직한 실시예의 수행과정을 도시한 흐름도,17 is a flowchart illustrating a process of performing a preferred embodiment of the method for measuring flight information of a spherical object according to the present invention;
도 18a 및 도 18b는 각각 제1트리거 신호에 대응하는 제1영상과 제2영상 및 제2트리거 신호에 대응하는 제3영상과 제4영상의 예를 도시한 도면,18A and 18B illustrate examples of a first image corresponding to a first trigger signal, a third image corresponding to a second image, and a fourth image corresponding to a second trigger signal, respectively;
도 19는 영상처리 후 얻어진 골프공 영상의 예를 도시한 도면,19 is a view showing an example of a golf ball image obtained after the image processing;
도 20은 정보측정부에 의한 골프공의 회전정보를 산출하는 과정을 도시한 흐름도, 그리고,20 is a flowchart illustrating a process of calculating rotation information of a golf ball by the information measuring unit, and
도 21은 정보측정부에 의해 산출된 골프공의 비행정보 및 회전정보, 그리고 골프공의 비행궤적이 기재된 사용자 인터페이스 화면의 예를 도시한 도면이다.FIG. 21 is a diagram illustrating an example of a user interface screen in which flight information and rotation information of a golf ball and a flight trajectory of a golf ball are calculated by the information measuring unit.
Claims (12)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020090082750A KR101182393B1 (en) | 2009-09-03 | 2009-09-03 | Globe-shaped object |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020090082750A KR101182393B1 (en) | 2009-09-03 | 2009-09-03 | Globe-shaped object |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020090011450A Division KR100937922B1 (en) | 2009-02-12 | 2009-02-12 | System and method for measuring flight parameter of ball |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20100092357A KR20100092357A (en) | 2010-08-20 |
| KR101182393B1 true KR101182393B1 (en) | 2012-09-12 |
Family
ID=42757255
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020090082750A KR101182393B1 (en) | 2009-09-03 | 2009-09-03 | Globe-shaped object |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101182393B1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220044157A (en) | 2020-09-22 | 2022-04-06 | 썬전 그린조이 테크놀로지 컴퍼니 리미티드 | Golf ball landing type detection method, system and storage medium |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101078986B1 (en) * | 2011-03-31 | 2011-11-01 | (주) 골프존 | Apparatus for virtual golf simulation and method for the same |
| KR101418298B1 (en) * | 2011-09-23 | 2014-07-15 | 주식회사 크리에이츠 | Method and system for photographing object in movement with fixed camera, and based on taken images therefor, obtaining projection image of actual movement trace of same object |
| KR101246975B1 (en) * | 2011-12-01 | 2014-02-27 | 정미애 | Method for estimating flight information of sphere-shaped body using circle type marker |
| KR102173782B1 (en) * | 2019-03-28 | 2020-11-03 | 주식회사 에스메이커 | Screen parkgolf system using image processing technology |
| KR102382730B1 (en) * | 2020-06-15 | 2022-04-05 | 주식회사 에스메이커 | Screen parkgolf system using image processing technology |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6579190B2 (en) | 2000-03-15 | 2003-06-17 | Sumitomo Rubber Industries, Ltd. | Ball motion measuring apparatus |
| KR100871595B1 (en) | 2007-10-09 | 2008-12-02 | 박선의 | A system for measuring flying information of globe-shaped object using the high speed camera |
-
2009
- 2009-09-03 KR KR1020090082750A patent/KR101182393B1/en not_active IP Right Cessation
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6579190B2 (en) | 2000-03-15 | 2003-06-17 | Sumitomo Rubber Industries, Ltd. | Ball motion measuring apparatus |
| KR100871595B1 (en) | 2007-10-09 | 2008-12-02 | 박선의 | A system for measuring flying information of globe-shaped object using the high speed camera |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220044157A (en) | 2020-09-22 | 2022-04-06 | 썬전 그린조이 테크놀로지 컴퍼니 리미티드 | Golf ball landing type detection method, system and storage medium |
| KR102603819B1 (en) | 2020-09-22 | 2023-11-20 | 썬전 그린조이 테크놀로지 컴퍼니 리미티드 | Golf ball landing type detection method, system and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20100092357A (en) | 2010-08-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100937922B1 (en) | System and method for measuring flight parameter of ball | |
| KR101182393B1 (en) | Globe-shaped object | |
| JP3778427B2 (en) | Hitting ball diagnostic system | |
| US8016688B2 (en) | Method and apparatus for measuring ball launch conditions | |
| JP4198702B2 (en) | A method for calculating the trajectory of an object based on measured launch conditions. | |
| JP3187748B2 (en) | Golf ball motion measurement method | |
| KR101386793B1 (en) | Object location and movement detection system and method | |
| KR20060045366A (en) | Apparatus and method of measuring the flying behavior of a flying body | |
| US7273427B2 (en) | Method and system for selecting a golf club | |
| US7744480B2 (en) | One camera club monitor | |
| JP5932059B2 (en) | Golf club head measuring device | |
| US20070105637A1 (en) | Golf ball performance evaluation system | |
| JP5584961B2 (en) | Golf club trial hitting system and golf club trial hitting method | |
| JP2007167549A (en) | Apparatus and method for analyzing golf club head behavior, and sheet material | |
| JP4271615B2 (en) | Golf club head behavior measuring device | |
| JP2004132831A (en) | Method and apparatus for measuring rotating and flying characteristics of sphere | |
| KR101044729B1 (en) | System and method for measuring flight parameter of ball | |
| JP5572853B2 (en) | Sensing device for moving object, sensing processing method, and virtual golf simulation device using the same | |
| KR102527207B1 (en) | Shooting device and object behavior calculation device | |
| KR101023497B1 (en) | Apparatus and method for generating trigger signals | |
| KR101019782B1 (en) | Sensing processing device and method for moving object, and virtual golf simulation device using the same | |
| WO2008052605A1 (en) | Data processing system and golf diagnosis apparatus | |
| KR20100092356A (en) | System and method for measuring flight parameter of ball | |
| JP7161609B2 (en) | Method, system and non-transitory computer readable recording medium for measuring physical quantities associated with golf clubs | |
| KR102483484B1 (en) | Method, system, and non-transitory computer-readable recording medium for measuring physical quantities associated with a golf club |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application | ||
| AMND | Amendment | ||
| J201 | Request for trial against refusal decision | ||
| E801 | Decision on dismissal of amendment | ||
| B601 | Maintenance of original decision after re-examination before a trial | ||
| J301 | Trial decision |
Free format text: TRIAL DECISION FOR APPEAL AGAINST DECISION TO DECLINE REFUSAL REQUESTED 20120127 Effective date: 20120809 |
|
| S901 | Examination by remand of revocation | ||
| GRNO | Decision to grant (after opposition) | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20150907 Year of fee payment: 4 |
|
| LAPS | Lapse due to unpaid annual fee |