KR101143562B1 - 주행 환경 적응형 차간거리 제어 시스템 및 방법 - Google Patents
주행 환경 적응형 차간거리 제어 시스템 및 방법 Download PDFInfo
- Publication number
- KR101143562B1 KR101143562B1 KR1020050077937A KR20050077937A KR101143562B1 KR 101143562 B1 KR101143562 B1 KR 101143562B1 KR 1020050077937 A KR1020050077937 A KR 1020050077937A KR 20050077937 A KR20050077937 A KR 20050077937A KR 101143562 B1 KR101143562 B1 KR 101143562B1
- Authority
- KR
- South Korea
- Prior art keywords
- distance
- vehicle
- driving
- driving environment
- state
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 33
- 230000003044 adaptive effect Effects 0.000 title claims abstract description 16
- 238000001514 detection method Methods 0.000 claims description 39
- 230000007423 decrease Effects 0.000 claims 2
- 230000003340 mental effect Effects 0.000 abstract 1
- 230000001737 promoting effect Effects 0.000 abstract 1
- 238000001556 precipitation Methods 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K31/0058—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator responsive to externally generated signalling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K2031/0091—Speed limiters or speed cutters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/408—Radar; Laser, e.g. lidar
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/54—Audio sensitive means, e.g. ultrasound
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Controls For Constant Speed Travelling (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
본 발명은 자동 차량운행 시스템 및 방법에 있어서, 우천시와 같은 기후상태 및 야간 운행시 자동적으로 차간거리를 제어하는 시스템 및 방법에 관한 것으로, 센서를 이용하여 자동으로 우천시 및 야간 운행시를 감지하여 일반 운행시에 설정된 안전거리보다 더 넓게 안전 거리를 확보하도록 동력장치 및 제동장치를 조정하여 선행 차와의 거리를 변화시킨다. 이로써 야간 운행 및 우천시에 보다 안전한 안전거리를 확보하여 안전운행을 도모하고 운전자의 심적 안정과 미연의 사고 예방을 할 수 있는 주행 환경 적응형 차량 거리 제어 시스템 및 방법에 관한 것이다.
주행 환경 적응형 차간거리 제어(Adaptive Cruise Control)시스템, 주행환경 설정 값(Time Gap), 상대거리, 안전거리
Description
도 1은 종래의 차간거리 유지 장치이다.
도 2는 종래의 차간거리 유지 방법이다.
도 3은 본 발명의 차간거리 제어 장치이다.
도 4는 주행 환경에 따른 주행환경 설정 값(Time Gap)을 나타낸 표이다.
도 5는 본 발명의 기후상태 및 야간 운전시 차간거리 제어 방법이다.
<도면의 주요 부분에 대한 부호의 설명>
10: 휠속도 감지부 20: 차간거리 감지부
30: 제어부 40: 모듈레이터
100: 센서부 110: 차간 거리 감지 장치
120: 우천상태 감지 장치 130: 야간 운전 상태 감지 장치
200: 제어부 300: 동력 장치
400: 제동 장치
본 발명은 차간거리 제어 시스템 및 방법에 관한 것으로서, 더 상세하게는 주행 환경에 따라 자동으로 차간거리를 제어하는 주행 환경 적응형 차간거리 제어 시스템 및 방법에 관한 것이다.
차간거리 제어란 선행차와의 거리를 측정하여 안전거리를 유지하도록 자동적으로 주행 및 제동 장치를 조정하는 것을 말한다.
즉, 선행차와의 거리가 설정된 안전거리 이내로 줄어든 경우는 제동 장치를 이용하여 자차의 속도를 줄여서 선행차와의 거리를 늘려 안전거리를 확보하게끔 하는 것이다.
상기와 같은 목적을 달성하기 위해 종래에 여러 자동으로 차간거리를 제어하는 방법(ACC:Adaptive Cruise Control)이 개발되어 있다.
이하 도면을 참조하여 종래의 차간거리 제어 기술을 설명하기로 한다.
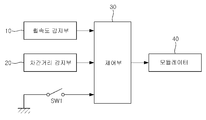
도 1은 종래의 기후상태에 따른 차간거리를 제어하는 장치를 나타낸 도면이다. 휠속도를 감지하여 현재의 차량 속도를 알아내는 휠속도 감지부(10)와, 선행차와의 차간거리를 감지하는 차간거리 감지부(20)와, 우천시 와이퍼를 작동시키는 스위치(S/W1)와, 상기 감지부들(10/20) 및 스위치(S/W1)로 부터 전기적 신호를 받아 서 모듈레이터(40)를 제어하는 제어부(30)와, 드로틀 밸브(throttle valve)와 브레이크(brake) 장치를 조정하는 모듈레이터(40)로 이루어져 있다.
상기 휠속도 감지부(10)는 휠실더에 장착되어 휠속도를 감지하여 그에 해당하는 전기적인 신호를 상기 제어부(30)로 출력하고, 상기 차간거리 감지부(20)는 전방차량과의 거리를 감지하여 그에 해당하는 전기적인 신호를 상기 제어부(30)로 출력하고, 와이퍼 작동 스위치(S/W1)는 우천시 와이퍼를 동작시키면 그에 해당하는 전기적인 신호를 상기 제어부(30)로 출력한다. 상기 제어부(30)는 입력되는 상기 전기적 신호로부터 우천시 혹은 비우천시에 설정된 차간거리를 판독한 다음, 감지되는 차간거리와 설정된 차간거리의 관계를 판단하여, 감지되는 차간거리가 설정된 차간거리보다 작은 경우에는 차륜에 제동력을 가하여 차속을 감속시키고, 감지되는 차간거리가 설정된 차간거리보다 크거나 같은 경우에는 현재의 차속을 유지하기 위한 유압제어신호를 모듈레이터(40)로 출력하고 상기 모듈레이터(40)는 상기 유압제어신호에 따라 휠실더로 인가되는 유압의 흐름을 조절함으로써, 차륜에 인가되는 제동력을 조절하여 설정되어 있는 안전거리에 맞게 차량을 운행할 수 있게 한다.
도 2는 종래의 차간거리 제어 방법을 나타낸 도면이다.
종래의 차간거리 제어 방법은 차량의 각 장치들의 초기화(s11)한다. 이후 현재 자차의 속도를 휠실더에 장착되어 있는 휠속도 센서를 이용하여 감지한다(s12). 이후 자차와 선행차와의 차간거리(S)를 상기 차간거리 감지부(20)를 이용하여 감지한다(s13). 이후 와이퍼 작동스위치(SW1)의 동작상태로부터 우천시 인지 아 닌지를 판단한다.(s14). 와이퍼 작동스위치(SW1)가 작동(on) 상태인 경우는 우천시 모드로 진행하여 우천시에 설정된 안전거리(S1)를 데이터베이스(DB)나 메모리에 저장된 설정값으로부터 판독한다(s15). 이후 현재 차간거리(S)와 우천시 설정된 안전거리(S1)와 비교를 한다(s16). 상기 현재의 차간거리가(S) 우천시 설정된 안전거리(S1)보다 짧은 경우는 현재의 운행 속도를 줄이기 위하여 제동 장치를 동작시켜 현재 차량의 운행 속도를 줄인다(s17).
만일 현재의 차간거리가(S) 우천시 설정된 차간거리(S1) 보다 긴 경우는 현재의 차량 속도를 유지하면서 주행하도록 한다(s20).
와이퍼 작동 스위치(SW1)가 동작상태가 아닌(off) 경우는 비우천시 설정된 안전거리(S2)를 데이터베이스(DB)나 메모리에 저장된 설정값으로부터 판독한다(s18). 이후 현재의 차간거리(S)와 비우천시 설정된 안전거리(S2)와 비교하여(s19) 현재의 차간거리(S)가 비우천시 설정된 안전거리(S2)보다 긴 경우는 현재의 차량 속도를 유지하면서 주행하도록 한다(s20). 만일 현재의 차간거리(S)가 비우천시 설정된 안전거리(S2)보다 짧은 경우는 제동 장치를 이용하여 현재 차간거리(S)를 비우천시 설정된 안전거리(S2) 보다 멀게 한다(s17).
하지만 상기와 같은 종래의 기술의 시스템 및 방법은 우천시의 안전 거리가 미리 설정되어 있어 강우량의 변화에 따른 안전거리가 변화해야 하는 데도 불구하고 항상 동일하게 안전거리가 설정되어 있어, 강우량의 변화에 따른 안전거리의 변화가 없다. 예를 들어 우천시라고 해도 강우량에 따라 확보해야하는 안전거리의 차 이가 생기는데 단지 우천시라고 해서 획일적인 안전거리를 설정하고 거기에 따른다는 것은 무리가 있다. 예를 들면 강우량이 적은 이슬비가 내리는 경우는 선행차와의 안전거리를 일반 시의 주행 안전거리보다 30% 이상 더 멀리 잡아야 한다. 그러나 강우량이 많은 소나기의 경우, 이때의 안전거리는 일반시의 안전거리보다 2~3배 멀리 두어야 한다.그런데 상기 종래의 차간거리 제어는 상기와 같은 강우량에 따른 안전거리의 변화를 두지 못한다.
또한 종래의 기술은 차간거리의 제어를 단지 기후변화의 요소인 우천시에만 한정하고 있어 야간운전에 따른 차간거리의 제어는 불가능하다. 야간 운전시에도 우천시운행과 같이 일반운행과는 다른 안전거리의 확보가 필요한데, 상기 종래의 기술에서는 이러한 야간운행의 차간거리 제어를 할 수 없다.
더욱이, 우천시 야간 운전에 있어서는 안전을 위해서 일반적으로 운전자들은 우천시 또는 야간 운행시보다 더 넓은 안전거리를 확보하여 운전을 하는데, 상기 종래의 기술에서는 상기 우천시 야간운전에 요구되는 안전거리확보에 따른 차간거리 제어를 할 수 없는 문제가 있다.
상기와 같은 문제를 해결하기 위하여 본 발명은 우천시 및 야간운행시를 고려하여 안전거리를 각 상황에 맞추어 일반운행시와 다르게 설정할 수 있게 하였다.
또한, 주행 환경 상황에 따라 주행 환경이 변하면 즉시 차간거리를 상기 주행 환경에 맞게 설정할 수 있게 하였다. 이에 주행환경 상황이 열악한 경우는 차간 안전거리를 보다 멀리 설정하여 미연의 사고를 방지하고 운전자들이 운행중 보다 안정감을 느끼며 운행을 할 수 있도록 한다.
상기와 같은 목적을 달성하기 위하여 본 발명의 주행 환경 적응형 차간거리 제어 시스템은, 선행차와의 거리를 감지할 수 있는 차간거리 감지 장치와, 우천상태임을 감지하는 우천상태 감지 장치와, 상기 감지 장치들을 이용하여 주행환경을 판단하고 동력장치 및 제동장치를 제어하는 제어장치를 포함하는 차간거리 제어 시스템에 있어서,
상기 우천상태 감지 장치는 강우량에 따라 다르게 움직이는 와이퍼의 동작상태를 감지하여, 와이퍼의 동작상태에 따라 각 상태별 전기적 신호를 다르게 출력하며, 상기 제어장치는 상기 우천상태 감지 장치로부터 출력되는 전기적 신호에 따라 차량속도를 다르게 설정하여 차간거리를 차등적으로 제어하는 것을 특징으로 한다.
또한, 본 발명의 주행 환경 적응형 차간거리 제어 시스템은 전조등 동작 상태를 감지하여 전기적 신호를 변화시켜 출력함으로써, 야간 운전 상태를 감지할 수 있는 야간 운전 상태 감지 장치를 추가로 포함하며, 상기 제어장치는 상기 야간 운전상태 감지장치로부터 출력되는 전기적 신호에 따라 차간거리를 차등적으로 제어하는 것을 특징으로 한다.
또한, 상기와 같은 목적을 달성하기 위하여 본 발명의 주행 환경 적응형 차간거리 제어 방법은, 우천상태 감지장치로부터 강우량에 따라 다른 우천상태를 감지하여 주행환경 설정값을 조정하는 제 1단계와, 야간 운전상태 감지장치로부터 야간운전상태를 감지하여 주행환경 설정값을 조정하는 제 2단계와, 차간 거리 감지장치로부터 선행차와의 상대거리를 감지하는 제 3단계와, 상기 조정된 주행환경 설정값에 따라 주행속도를 제어하여 선행차와의 안전거리를 유지하는 제 4단계로 이루어진 것을 특징으로 한다.
이하 도면을 참조하여 보다 상세하게 본 발명을 설명하고자 한다.
도 3은 본 발명의 기후상태 및 야간 운전시 차간거리 제어 장치이다. 센서부(100)는 선행차와의 차간거리를 감지할 수 있는 차간 거리 감지 장치(110)와, 레인센서(Rain sensor) 또는 와이퍼 상태 감지 장치를 이용한 우천 상태 감지 장치(120)와, 포토센서(Photo sensor) 또는 전조등 상태 감지 장치를 이용한 야간 운전 상태 감지 장치(130)로 이루어져 있다.
상기 차간 거리 감지 장치(110)는 선행차가 있는 경우, 초음파나 레이져등을 이용하여 선행차와 차간거리를 측정하고 전기적 신호를 제어부(200)로 출력한다. 상기 차간 거리 감지 장치(110)는 종래의 주지된 기술을 이용할 수 있다.
상기 우천 상태 감지 장치(120)는, 주행 중 비가 오는 경우 와이퍼를 작동하게 되는데, 이때 와이퍼의 작동 상태(OFF/INT/LO/HI)를 체크하여 각 상태에 맞춰 상기 제어부(200)로 전기적 신호를 변화시켜 출력한다. 또는 상기 우천 상태 감지 장치(120)는 레인 센서를 이용하여 강우량을 측정하여 강우량에 따라 전기적 신호를 상기 제어부(200)로 다르게 출력할 수도 있다.
상기 야간운전 상태 감지 장치(130)는 야간운전시 전조등을 켜게 되는데 이때 전조등의 작동을 체크하여 전조등이 켜지면(ON 상태) 야간 운전인 경우로 판단하여 상기 제어부(200)로 전기적 신호를 출력한다. 또는 상기 야간운전 상태 감지 장치(130)는 포토센서를 이용하여 야간 운전인 경우를 판단할 수도 있다.
상기 센서부(100)로부터 전기적 신호를 받은 제어부(200)는 상기 센서부(100)로부터 입력되는 각 신호들의 상태를 판단하여 우천시 및 야간시인 경우를 조합하고, 상기 조합된 한 상황에 맞게 주행환경 설정 값(Time Gap)을 변화시킨다. 또한 상기 변화된 주행환경 설정 값(Time Gap)에 맞게 동력 장치(300) 및 제동 장치(400)를 제어한다.
본 발명에서는 선행차와의 안전거리를 주행환경 설정 값(Time Gap)을 이용하여 변화시키며 유지하는데 그 방법은 다음과 같다.
선행차와의 안전거리 = 주행환경 설정 값(Time Gap) * 주행속도
즉, 제어부(200)는 자차의 주행속도에 따라서 미리 설정된 주행환경 설정 값(Time Gap)에 의해 안전거리를 유지하도록 동력 장치(300) 또는 제동 장치(400)를 제어하여 적절한 거리를 유지한다. 따라서 주행환경 설정 값(Time Gap)이 커지게 되면 선행차와의 안전거리를 멀게 제어하는 것이고, 주행환경 설정 값(Time Gap)이 작아지면 선행차와의 안전거리를 가깝게 제어한다.
본 발명에서는 우천시 및 야간 운전시에 강수량의 정도와 야간인 경우에 각각의 상태를 조합하여 각 상태의 주행환경 설정 값(Time Gap)을 정해 놓는다. 그럼으로써 주행상황에 맞게 상기 주행환경 설정 값(Time Gap)을 이용하여 선행차와의 안전거리를 자동으로 제어할 수 있다.
도 4는 주행 환경에 따른 주행환경 설정 값(Time Gap)을 나타낸 표이다.
도 4를 참조하면, 와이퍼 상태가 오프(Off) 이고 전조등이 오프(off) 상태인 경우 즉, 일반 운행 상태인 경우는 주행환경 설정 값(Time Gap)를 초기값인 1로 하고 자차의 주행속도에 의해 안전거리를 유지한다. 예를 들어 자차의 주행속도가 60Km/h인 경우에, 상기와 같은 주행환경 설정 값(Time Gap)이 초기값 1인 경우는 안전거리가 60미터(1*60=60) 정도가 되게 한다. 만일 자차의 주행 속도가 60Km/h인 경우에 도4의 표와 같이 야간운전시이고 와이퍼가 빠르게 동작(HI)하는 강우량이 많은 경우 즉, 주행환경 설정 값(Time Gap)이 5인 경우에는 안전거리를 300m(5*60=300)정도가 되게 한다. 상기 도 4의 주행환경 설정 값(Time Gap)은 제어부(200)의 기억장치에 미리 데이터베이스(DB)화 하여 설정해 두고, 상기 센서부(100)로부터 오는 전기적 신호들을 판단하여 상기 기억장소에 설정된 값 중 하나로 판독한다.
도 5는 본 발명의 기후상태 및 야간 운전시 차간거리 제어 방법이다. 본 발 명은 크게 초기화하는 단계와, 우천운전상태를 감지할 수 있는 단계와, 야간운전상태를 감지할 수 있는 단계와, 선행차가 존재하는지를 판단하는 단계와, 상기 선행차와의 차간거리를 제어할 수 있는 단계로 이루어져 있다. 상기 차간거리 제어를 초기화하는 단계에서는 차간거리 제어를 시작하면 현재 자차의 주행 속도를 설정(s110)하고 주행환경 설정 값(Time Gap)을 초기값 1로 설정한다(s120). 이후 와이퍼의 동작을 감지하여 우천 상태인지를 판단(s130)하는 단계로 넘어간다. 와이퍼가 동작을 하면 와이퍼 동작 상태를 감지(s140)하는 우천시 모드로 넘어가고 와이퍼가 동작을 하지 않으면 전조등의 동작상태를 판단하는 단계(s160)로 넘어간다. 상기 우천시 모드에서는 와이퍼의 동작 상태(INT/LO/HI)를 우천 상태 감지 장치(120)에서 감지(s140)하여 각 상태에 따라 전기적 신호를 다르게 출력하여 제어부(200)로 보낸다. 상기 제어부(200)에서는 상기 다르게 입력되는 전기적 신호로 부터 우천시 상태를 판독하여 주행환경 설정 값(Time Gap)을 상기 제어부의 기억장치에 데이터베이스(DB)화 되어 있는 값으로 판독한다(s150).
이후 상기 전조등의 동작상태에 따라 야간운전상태를 판단하는 단계(s160)로 넘어간다. 상기 전조등이 동작(ON)상태인 경우는 야간운전시 모드로 넘어가고 아닌 경우(OFF)는 선행차의 유무를 판단하는 단계(s180)로 넘어간다. 야간 운전시 모드에서는 야간 운전 상태 감지 장치(130)에서 감지하여 전조등의 동작 유무에 따라 전기적 신호를 다르게 출력하여 제어부(200)로 보낸다. 상기 제어부(200)에서는 상기 다르게 입력되는 전기적 신호로부터 야간 운전 상태를 판독하여 주행환경 설정 값(Time Gap)을 상기 제어부의 기억장치에 데이터베이스(DB)화 되어 있는 값으로 판독한다(s170).
이후 선행차의 유무를 판단하는 단계(s180)를 거친다. 상기 선행차의 유무는 차간 거리 감지 장치(110)를 이용하여 감지하며, 선행차의 유무에 따라 전기적 신호를 다르게 출력하여 제어부(200)로 보낸다. 선행차가 존재하는 경우에 상기 제어부(200)에서는 현재 자차의 주행 속도와 주행환경 설정 값(Time Gap)을 이용하여 안전거리를 설정한다(s190). 상기 안전거리를 설정한 후 선행차와의 거리(상대거리)를 상기 차간 거리 감지 장치(110)를 이용하여 감지한다(s200).
이후 상기 선행차와의 차간거리를 제어할 수 있는 단계를 거친다. 상기 선행차와의 차간거리를 제어할 수 있는 단계는 상기 감지된 선행차와의 거리(상대거리)와 설정된 안전거리를 비교하는 단계(s210)와, 상기 상대거리가 안전거리보다 짧은 경우 제동 장치(400)를 이용하여 상대거리가 안전거리보다 멀어지도록 하는 단계(s 220)와, 자차의 현재속도를 유지할 것인지를 판단하는 단계(s230)로 이루어져 있다. 상기 현재 속도를 유지하는 단계(s230)에서 현재속도를 계속 유지하는 경우는 상기 모든 단계가 종료되며, 현재 속도를 변화시킬 경우는 상기 초기화하는 단계의 주행 속도를 설정하는 단계로 돌아가서 이후의 단계를 반복하게 된다.
본 시스템은 주행 환경에 따라 우천시 또는 야간 운전시 자동으로 주행환경 설정 값(Time Gap)을 다르게 설정하고, 상기 주행환경 설정 값(Time Gap)에 의해서 선행차와의 안전 거리를 다르게 설정함으로써 주행환경에 따라 선행차와의 차간거 리를 다르게 설정할 수 있다. 이로 인해서 주행환경이 열악한 경우는 일반적인 운행상황보다 선행차 사이의 차간거리를 자동적으로 더 멀게 설정할 수 있어, 보다 안전한 운행 및 운전자가 주행중 수동으로 선행차와의 안전거리를 새롭게 설정하여 선행차와의 차간거리를 다시금 조절해야 하는 불편함과 그로 인한 위험성을 줄일 수 있다. 뿐만 아니라 주행 환경의 변화에 따라 차간거리를 자동으로 멀게 하여 제어함으로써 주행중 운전자가 보다 안정감을 느낄 수 있도록 배려하였다.
Claims (11)
- 선행차와의 거리를 감지할 수 있는 차간거리 감지 장치와 우천상태임을 감지하는 우천상태 감지 장치와 상기 감지 장치들을 이용하여 주행환경을 판단하고 동력장치 및 제동장치를 제어하는 제어장치를 포함하는 차간거리 제어 시스템에 있어서,상기 우천상태 감지 장치는 강우량에 따라 다르게 움직이는 와이퍼의 동작상태를 감지하여, 와이퍼의 동작상태에 따라 각 상태별 전기적 신호를 다르게 출력하고,상기 제어장치는 상기 우천상태 감지 장치로부터 출력되는 전기적 신호에 따라 차량속도를 다르게 설정하여 차간거리를 차등적으로 제어하며,전조등 동작 상태를 감지하여 전기적 신호를 변화시켜 출력함으로써, 야간 운전 상태를 감지할 수 있는 야간 운전 상태 감지 장치를 추가로 포함하고,상기 제어장치는 상기 야간 운전상태 감지장치로부터 출력되는 전기적 신호에 따라 차간거리를 차등적으로 제어하며,상기 제어장치는 상기 우천상태 감지장치와 상기 야간 운전상태 감지장치로부터 출력되는 전기적 신호를 입력받아서 우천상태 및 야간 운전상태에 맞도록 주행환경 설정값을 변화시키고, 상기 주행환경 설정값에 맞게 차간거리를 차등적으로 제어하되,우천상태 및 야간 운전상태에 맞는 주행환경 설정값은 와이퍼 상태에 따른 주행환경 설정값 중 전조등 상태에 대응하는 주행환경 설정값으로 설정되는 것을 특징으로 하는 주행 환경 적응형 차간거리 제어 시스템.
- 삭제
- 삭제
- 청구항 1에 있어서,상기 제어장치는 상기 주행환경 설정값이 커지게 되면 앞차와의 상대거리를 멀게 제어하고, 상기 주행환경 설정값이 작아지면 상대거리를 작게 제어하는 것을 특징으로 하는 주행 환경 적응형 차간거리 제어 시스템.
- 청구항 1에 있어서,상기 차간거리 감지 장치는 초음파나 레이저를 이용하여 선행차와의 차간거리를 감지하는 것을 특징으로 하는 주행 환경 적응형 차간거리 제어 시스템.
- 청구항 1에 있어서,상기 우천 상태 감지 장치는 레인센서를 이용하여 강우량에 따라 전기적 신호를 다르게 변화시켜 출력하는 것을 특징으로 하는 주행 환경 적응형 차간거리 제어 시스템.
- 청구항 1에 있어서,상기 야간 운전 상태 감지 장치는 포토센서(Photo sensor)를 이용하여 야간운전인 것을 감지하여 전기적 신호를 변화시켜 출력하는 것을 특징으로 하는 주행 환경 적응형 차간거리 제어 시스템.
- 우천상태 감지장치로부터 강우량에 따라 다른 우천상태를 감지하여 주행환경 설정값을 조정하는 제 1단계와;야간 운전상태 감지장치로부터 야간운전상태를 감지하여 주행환경 설정값을 조정하는 제 2단계와;차간 거리 감지장치로부터 선행차와의 상대거리를 감지하는 제 3단계와;상기 조정된 주행환경 설정값에 따라 주행속도를 제어하여 선행차와의 안전거리를 유지하는 제 4단계;로 이루어지며,제어장치는 상기 제1 및 제2 단계를 통해 우천상태 및 야간 운전상태에 맞도록 주행환경 설정값을 조정하되,우천상태 및 야간 운전상태에 맞는 주행환경 설정값은 와이퍼 상태에 따른 주행환경 설정값 중 전조등 상태에 대응하는 주행환경 설정값으로 설정되는 것을 특징으로 하는 주행 환경 적응형 차간거리 제어 방법.
- 청구항 8에 있어서, 상기 1단계는상기 우천상태 감지장치는 와이퍼의 작동을 감지하여 우천시를 판단하는 1-1단계와;상기 우천상태 감지장치는 와이퍼의 작동시 와이퍼의 동작상태(OFF/INT/LO/HI)를 감지하는 1-2단계와;상기 와이퍼의 동작상태에 따라 주행환경 설정 값을 조정하는 1-3단계;로 이루어진 것을 특징으로 하는 주행 환경 적응형 차간거리 제어 방법.
- 청구항 8에 있어서, 상기 2단계는상기 야간 운전상태 감지장치는 전조등이 동작상태(ON 상태)인지를 판단하는 2-1단계와;상기 야간 운전상태 감지장치는 상기 전조등이 동작상태(ON 상태)인 경우 야간 운전 상태로 판단하여 주행환경 설정 값을 조정하는 2-2단계;로 이루어진 것을 특징으로 하는 주행 환경 적응형 차간거리 제어 방법.
- 청구항 8에 있어서, 상기 4단계에서상기 선행차가 있는 경우 현재 주행속도와 상기 조정된 주행환경 설정 값에 맞게 자차와 선행차 사이의 안전거리를 설정하는 4-1단계와;상기 설정된 안전거리와 상기 감지된 상대거리를 비교하는 4-2단계와;상기 상대거리가 설정된 안전거리보다 짧은 경우 제동장치를 이용하여 상대거리가 설정된 안전거리보다 멀어질 때까지 주행속도를 제어하는 4-3단계;로 이루어진 것을 특징으로 하는 주행 환경 적응형 차간거리 제어 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020050077937A KR101143562B1 (ko) | 2005-08-24 | 2005-08-24 | 주행 환경 적응형 차간거리 제어 시스템 및 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020050077937A KR101143562B1 (ko) | 2005-08-24 | 2005-08-24 | 주행 환경 적응형 차간거리 제어 시스템 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20070023392A KR20070023392A (ko) | 2007-02-28 |
| KR101143562B1 true KR101143562B1 (ko) | 2012-05-09 |
Family
ID=43654751
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020050077937A KR101143562B1 (ko) | 2005-08-24 | 2005-08-24 | 주행 환경 적응형 차간거리 제어 시스템 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101143562B1 (ko) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101526788B1 (ko) * | 2014-02-20 | 2015-06-05 | 현대자동차주식회사 | 차량 속도 자동 제어 장치 및 방법 |
| KR102186137B1 (ko) * | 2015-08-21 | 2020-12-03 | 현대자동차주식회사 | 차량 정보 기반 센서퓨전 시스템 |
| CN114103970A (zh) * | 2020-08-31 | 2022-03-01 | 长城汽车股份有限公司 | 利用雨刷的车辆控制方法和系统及车载终端 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0740758A (ja) * | 1993-07-30 | 1995-02-10 | Isuzu Motors Ltd | 車両の速度制御装置 |
| JPH10138792A (ja) * | 1996-11-13 | 1998-05-26 | Mitsubishi Motors Corp | 車両の走行制御装置 |
| JPH1134692A (ja) * | 1997-07-18 | 1999-02-09 | Denso Corp | 車間距離制御装置 |
| KR20050026127A (ko) * | 2003-09-09 | 2005-03-15 | 현대자동차주식회사 | 감응식 순항 제어 시스템 |
| JP2005145403A (ja) * | 2003-11-20 | 2005-06-09 | Mitsubishi Motors Corp | 車間距離制御装置 |
-
2005
- 2005-08-24 KR KR1020050077937A patent/KR101143562B1/ko not_active IP Right Cessation
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0740758A (ja) * | 1993-07-30 | 1995-02-10 | Isuzu Motors Ltd | 車両の速度制御装置 |
| JPH10138792A (ja) * | 1996-11-13 | 1998-05-26 | Mitsubishi Motors Corp | 車両の走行制御装置 |
| JPH1134692A (ja) * | 1997-07-18 | 1999-02-09 | Denso Corp | 車間距離制御装置 |
| KR20050026127A (ko) * | 2003-09-09 | 2005-03-15 | 현대자동차주식회사 | 감응식 순항 제어 시스템 |
| JP2005145403A (ja) * | 2003-11-20 | 2005-06-09 | Mitsubishi Motors Corp | 車間距離制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20070023392A (ko) | 2007-02-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3233739B2 (ja) | 自動車の走行制御装置 | |
| US6229263B1 (en) | Lighting-direction control unit for vehicle lamp | |
| US5485381A (en) | Navigation system for land vehicles | |
| EP0677799B1 (en) | Vehicle travel aiding device | |
| JP2007161225A (ja) | 車間距離制御方法及びそのシステム | |
| CN103813950A (zh) | 用于改善行驶稳定性的方法 | |
| US6854548B2 (en) | Automobile running control system | |
| JP2000127798A (ja) | 車両速度の制限方法および装置 | |
| KR20170022709A (ko) | 차량 정보 기반 센서퓨전 시스템 | |
| JP2003516892A (ja) | 間隔距離制御装置 | |
| JP3412553B2 (ja) | 自動走行制御装置 | |
| JPH1145398A (ja) | 自車線物体検出装置及びこれを備えた車両走行制御装置 | |
| US20190283772A1 (en) | Driving support system and vehicle control method | |
| KR101143562B1 (ko) | 주행 환경 적응형 차간거리 제어 시스템 및 방법 | |
| JP3816840B2 (ja) | ブレーキ制御装置 | |
| CN110979278B (zh) | 一种基于雨量大小的自动紧急制动控制方法 | |
| JP2006524603A (ja) | 自動車における速度および間隔制御装置 | |
| JP4007319B2 (ja) | 車線変更判断装置、及びこれを備えた車線逸脱防止装置 | |
| US6518704B1 (en) | Method and device for automatically switching on or off the lights of a vehicle | |
| CN111609124B (zh) | 车辆档位自动控制方法、装置及车辆 | |
| GB2357333A (en) | Automatic irradiation direction control apparatus for a vehicle lamp | |
| JPH04257739A (ja) | 車両用走行制御装置 | |
| KR102012678B1 (ko) | 차량 및 그 제어방법. | |
| JPH04331615A (ja) | サスペンション制御装置 | |
| CN114572249A (zh) | 一种雨雪天气下自动驾驶目标性能动态调节的方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20180329 Year of fee payment: 7 |
|
| LAPS | Lapse due to unpaid annual fee |