KR101075363B1 - 최소 침습 수술 도구를 포함하는 수술용 로봇 시스템 - Google Patents
최소 침습 수술 도구를 포함하는 수술용 로봇 시스템 Download PDFInfo
- Publication number
- KR101075363B1 KR101075363B1 KR1020080108103A KR20080108103A KR101075363B1 KR 101075363 B1 KR101075363 B1 KR 101075363B1 KR 1020080108103 A KR1020080108103 A KR 1020080108103A KR 20080108103 A KR20080108103 A KR 20080108103A KR 101075363 B1 KR101075363 B1 KR 101075363B1
- Authority
- KR
- South Korea
- Prior art keywords
- yaw
- shaft
- surgical
- pulleys
- minimally invasive
- Prior art date
Links
- 238000002324 minimally invasive surgery Methods 0.000 title abstract description 14
- 239000012636 effector Substances 0.000 claims abstract description 57
- 230000033001 locomotion Effects 0.000 claims description 33
- 230000007246 mechanism Effects 0.000 description 13
- 238000001356 surgical procedure Methods 0.000 description 13
- 206010052428 Wound Diseases 0.000 description 7
- 208000027418 Wounds and injury Diseases 0.000 description 7
- 230000008407 joint function Effects 0.000 description 4
- 238000002357 laparoscopic surgery Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 210000000683 abdominal cavity Anatomy 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000002674 endoscopic surgery Methods 0.000 description 2
- 230000002452 interceptive effect Effects 0.000 description 2
- 208000002847 Surgical Wound Diseases 0.000 description 1
- 210000001015 abdomen Anatomy 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000026058 directional locomotion Effects 0.000 description 1
- 238000011846 endoscopic investigation Methods 0.000 description 1
- 208000003906 hydrocephalus Diseases 0.000 description 1
- 230000009545 invasion Effects 0.000 description 1
- 210000003734 kidney Anatomy 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000004060 metabolic process Effects 0.000 description 1
- 210000004197 pelvis Anatomy 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 231100000241 scar Toxicity 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images









































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/34—Trocars; Puncturing needles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00973—Surgical instruments, devices or methods pedal-operated
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
- A61B2034/742—Joysticks
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Molecular Biology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Robotics (AREA)
- Pathology (AREA)
- Manipulator (AREA)
- Surgical Instruments (AREA)
Abstract
본 발명은 외과의사 등의 사용자가 최소 침습 수술 도구를 정교하고도 용이하고 제어할 수 있도록 하는 수술용 로봇 시스템에 관한 것으로서, 상기 수술용 로봇 시스템은 다수의 로봇 암 및 수술 동작부를 포함하고, 상기 수술 동작부는 상기 다수의 로봇 암 중 적어도 하나에 의해 피치 방향 및/또는 요 방향으로 제어될 수 있고, 상기 수술 동작부는 적어도 하나의 최소 침습 수술 도구를 포함하며, 상기 적어도 하나의 최소 침습 수술 도구는 주 샤프트, 제1 동작 샤프트, 제2 동작 샤프트, 엔드 이펙터 및 조작부를 포함하고, 상기 조작부는 상기 제1 동작 샤프트, 상기 제2 동작 샤프트 및 상기 엔드 이펙터를 제어하는 것을 특징으로 한다.
최소 침습 수술, 수술용 로봇 시스템
Description
본 발명은 최소 침습 수술(minimally invasive surgery) 도구를 포함하는 수술용 로봇 시스템에 관한 것이다. 보다 상세하게는, 본 발명은 외과의사 등의 사용자가 최소 침습 수술 도구를 정교하고도 용이하고 제어할 수 있도록 하는 수술용 로봇 시스템에 관한 것이다.
최소 침습 수술은 몇 개의 작은 절개부를 통해 수술 도구를 삽입하여 수술을 수행함으로써 수술로 인한 절개를 최소화하는 수술 기법이다.
이러한 최소 침습 수술은, 수술 후에 일어나는 환자의 대사 과정의 변화를 상대적으로 감소시킬 수 있으므로, 환자의 회복 기간을 짧게 하는 데에 도움이 된다. 따라서, 최소 침습 수술을 적용하면, 환자의 수술 후의 입원 기간도 단축되며, 환자가 수술 후 짧은 시일 내에 정상적인 생활로 복귀할 수 있게 된다. 또한, 최소 침습 수술을 통해, 환자가 느끼는 통증을 경감하는 한편, 수술 후 환자에게 남는 흉터를 줄일 수도 있게 된다.
최소 침습 수술의 가장 일반적인 형태는 내시경 수술일 것이다. 그 중에서 도, 가장 일반적인 형태의 내시경 수술은 복강 내에서 최소 침습 조사와 수술을 하는 복강경 수술이다. 표준 복강경 수술을 수행할 때에는, 환자의 복부에 가스를 채워 넣고, 복강경 수술 도구에 대한 입구를 제공하기 위하여 작은 절개부(약 1/2 인치 이하)를 만든 후에, 이를 통하여 트로카(trocar)를 삽입한다. 복강경 수술 도구는 일반적으로 복강경(수술 부위 관찰용)과 기타 작업 도구를 포함한다.
여기서, 작업 도구는, 각 도구의 작업 단부 또는 말단 동작부가 소정의 샤프트에 의해 그것의 손잡이로부터 이격되어 있다는 점을 제외하고는, 종래의 절개 수술에 사용되는 것과 유사하다. 즉, 작업 도구는, 예를 들어, 클램프, 그라스퍼, 가위, 스테이플러, 바늘 잡게 등을 포함할 수 있다. 수술을 수행하기 위하여, 사용자는 트로카를 통해 수술 부위에 작업 도구를 들여 보내고 복강 외부로부터 그것을 조작한다.
한편, 사용자는 복강경에 의해 찍히는 수술 부위의 영상을 표시하는 모니터에 의해 진행 상황을 모니터링한다. 이와 유사한 내시경 기술은, 후복막강경, 골반경, 관절경, 뇌수조경, 부비강경, 자궁경, 신장경, 방광경, 요도경, 신우경 등에 두루 사용된다.
이러한 최소 침습 수술은 많은 장점을 가지고 있지만, 일반적인 기존의 최소 침습 수술 도구들은 딱딱하고 긴 샤프트에 엔드 이펙터가 연결되어 있어, 수술 부위로의 접근이 어렵고 그 조작이 자유롭지 못한 단점을 지니고 있다. 이에 본 발명자는 본 출원에 선행되어 출원된 한국특허출원 제2008-51248호, 제2008-61894호, 제2008-79126호 및 제2008-90560호에 기술된 바와 같은 신규한 최소 침습 수술 도 구를 고안한 바 있다(이상의 특허출원의 명세서는 각각 그 전체로서 본 명세서에 편입된 것으로 간주되어야 한다).
특히, 상기 출원들 중에서 한국특허출원 제2008-79126호 및 제2008-90560호에 기술된 바와 같은 최소 침습 수술 도구는 환자의 신체에 절개부를 하나만 형성한 후에 수술을 수행하는 경우에 매우 적합한 것이다. 이에 본 발명자는 상기 출원들 중 적어도 하나에서 기술된 바와 같은 최소 침습 수술 도구 또는 상기 최소 침습 수술 도구의 원리를 채용하는 수술용 로봇 시스템을 고안하였다.
본 발명은 상기 문제점들을 모두 해결하는 것을 그 목적으로 한다.
본 발명은 사용자가 정교하고도 용이하게 최소 침습 수술을 수행할 수 있도록 하는 수술용 로봇 시스템을 제공하는 것을 다른 목적으로 한다.
본 발명은 사용자가 수술 대상인 환자와 떨어져 있는 상황에서도 수술이 가능하도록 하는 수술용 로봇 시스템을 제공하는 것을 또 다른 목적으로 한다.
본 발명은 사용자로 하여금 비교적 짧은 시간 동안 비교적 적은 에너지를 들여 최소 침습 수술을 수행할 수 있도록 하는 수술용 로봇 시스템을 제공하는 것을 또 다른 목적으로 한다.
상기 목적을 달성하기 위한 본 발명의 대표적인 구성은 다음과 같다.
본 발명의 일 태양에 따르면, 수술용 로봇 시스템으로서, 다수의 로봇 암 및 수술 동작부를 포함하고, 상기 수술 동작부는 상기 다수의 로봇 암 중 적어도 하나에 의해 피치 방향 및/또는 요 방향으로 제어될 수 있고, 상기 수술 동작부는 적어도 하나의 최소 침습 수술 도구를 포함하며, 상기 적어도 하나의 최소 침습 수술 도구는 주 샤프트, 제1 동작 샤프트, 제2 동작 샤프트, 엔드 이펙터 및 조작부를 포함하고, 상기 조작부는 상기 제1 동작 샤프트, 상기 제2 동작 샤프트 및 상기 엔드 이펙터를 제어하는 수술용 로봇 시스템이 제공된다.
본 발명에 의하면, 사용자가 정교하고도 용이하게 최소 침습 수술을 수행할 수 있도록 하는 수술용 로봇 시스템이 제공된다.
본 발명에 의하면, 사용자가 수술 대상인 환자와 떨어져 있는 상황에서도 수술이 가능하도록 하는 수술용 로봇 시스템이 제공된다.
본 발명에 의하면, 사용자로 하여금 비교적 짧은 시간 동안 비교적 적은 에너지를 들여 최소 침습 수술을 수행할 수 있도록 하는 수술용 로봇 시스템이 제공된다.
후술하는 본 발명에 대한 상세한 설명은, 본 발명이 실시될 수 있는 특정 실시예를 예시로서 도시하는 첨부 도면을 참조한다. 이들 실시예는 당업자가 본 발명을 실시할 수 있기에 충분하도록 상세히 설명된다. 본 발명의 다양한 실시예는 서로 다르지만 상호 배타적일 필요는 없음이 이해되어야 한다. 예를 들어, 여기에 기재되어 있는 특정 형상, 구조 및 특성은 일 실시예에 관련하여 본 발명의 정신 및 범위를 벗어나지 않으면서 다른 실시예로 구현될 수 있다. 또한, 각각의 개시된 실시예 내의 개별 구성요소의 위치 또는 배치는 본 발명의 정신 및 범위를 벗어나지 않으면서 변경될 수 있음이 이해되어야 한다. 따라서, 후술하는 상세한 설명은 한정적인 의미로서 취하려는 것이 아니며, 본 발명의 범위는, 적절하게 설명된다면, 그 청구항들이 주장하는 것과 균등한 모든 범위와 더불어 첨부된 청구항에 의해서만 한정된다. 도면에서 유사한 참조부호는 여러 측면에 걸쳐서 동일하거나 유사한 기능을 지칭한다.
이하, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자가 본 발명을 용이하게 실시할 수 있도록 하기 위하여, 본 발명의 바람직한 실시예들에 관하여 첨부된 도면을 참조하여 상세히 설명하기로 한다.
[본 발명의 바람직한 실시예]
수술용 로봇 시스템의 구성
도 1은 본 발명의 일 실시예에 따른 수술용 로봇 시스템의 전체 구성을 나타내는 도면으로서, 수술용 로봇 시스템은 수술대(1)의 환자에 대한 수술을 수행할 수 있는 동작 로봇(10)과 수술 동작부(40), 그리고 사용자의 조작을 반영하여 동작 로봇(10)과 수술 동작부(40)를 제어할 수 있는 주 제어부(300)로 구성될 수 있다. 주 제어부(300)에서 이루어지는 조절 손잡이부, 조이스틱 및 페달의 조작은 전기적인 신호로 변환된 후 동작 로봇(10) 및/또는 수술 동작부(40)로 전달되고, 전달된 신호에 따라 전동 모터/유압 실린더와 같은 장치에 의해 동작 로봇(10) 및/또는 수술 동작부(40)가 구동, 제어될 수 있다.
본 발명자는 이와 같은 주 제어부(300)를 구성하는 데에 도움이 될 수 있는 종래 기술에 관하여, 발명의 명칭을 "Master-slave Manipulators with Scaling"으로 하는 미국등록특허 제4,853,874호와, 발명의 명칭을 "Positioner for Medical Instruments"로 하는 미국등록특허 제5,779,623호와, 발명의 명칭을 "Medical Robotic System"으로 하는 미국등록특허 제6,102,850호를 참조할 수 있음을 밝히는 바이다. 다만, 이러한 종래 기술에 대한 언급은 본 발명의 주 제어부(300)가 반드시 상기 종래 기술을 응용함으로써 구성되어야 한다는 의미로 행해진 것은 아님이 또한 이해되어야 한다.
도 2는 본 발명의 일 실시예에 따른 수술용 로봇 시스템에 포함되는 동작 로봇(10)의 전체적인 구성을 나타내는 사시도로서, 동작 로봇(10)은 그 전체를 지지할 수 있는 베이스(20)(수평 지지대(22), 수직 지지대(24), 수직 암(26) 및 수평 암(28)을 포함할 수 있음)와, 베이스(20)에 연결되어 사용자의 조작에 따라 수술을 위한 동작을 수행하는 로봇 암(30)(제1 내지 제4 로봇 암(32, 34, 36, 38)을 포함할 수 있음)으로 구성될 수 있다.
베이스(20)는 원활한 수술 진행을 위하여 동작 로봇(10) 전체가 외력에 의해 진동하는 것을 방지할 수 있도록 구성되는 것이 바람직하다. 이를 위해, 베이스(20)는 고하중의 재료로 만들어진 수평 지지대(22)와 수직 지지대(24)를 포함할 수 있고 바닥에 견고하게 고정될 수 있다.
또한, 베이스(20)는 서지(surge) 방향 동작(즉, 종축 방향의 전진, 후진 동작)과 롤(roll) 동작을 수행할 수 있는 수직 암(26)과 피치(pitch) 방향 동작을 수행할 수 있는 수평 암(28)을 포함할 수 있으며, 수직 암(26)과 수평 암(28)은 후술하는 여러 로봇 암의 위치 등을 제어할 수 있다.
한편, 로봇 암(30)에는 수술 동작부(40)가 연결될 수 있고, 수술 동작부(40)에는 내시경 및/또는 최소 침습 수술 도구가 배치될 수 있다. 로봇 암(30)은 사용자의 조작에 따라 서지 방향 동작, 피치 방향 동작 및/또는 롤 동작을 하도록 구성될 수 있다. 아래에서 더 자세히 살펴보기로 한다.
도 3a 및 도 3b는 본 발명의 일 실시예에 따른 여러 로봇 암의 구성 및 동작 을 나타내는 도면이다. 도 3a 및 도 3b에 도시된 바와 같이, 베이스(20)에 연결되어 있는 로봇 암(30)은 제1 내지 제4 로봇 암(32, 34, 36, 38)으로 구성될 수 있다.
제1 로봇 암(32)은 도시된 바와 같이 수평 암(28)에 대하여 롤 동작을 할 수 있다(이는 수술 동작부(40)의 요 방향 동작을 야기할 수 있다). 한편, 제2 로봇 암(34)은 제1 로봇 암(32)에 대하여 피치 방향 동작을 할 수 있다(이는 수술 동작부(40)의 피치 방향 동작을 야기할 수 있다). 이때, 도 3b에 도시된 바와 같이, 제3 로봇 암(34)의 동작은 제1 로봇 암(32)의 종축과 평행하게 이루어지도록 하는 것이 바람직하고, 이에 따라 제4 로봇 암(38)의 피치 방향 동작의 동작량은 제2 로봇 암(34)의 피치 방향 동작의 동작량과 실질적으로 동일하게 될 수 있다. 도시된 경우에는, 제1 로봇 암(32)의 종축과 수술 동작부(40)의 종축이 만나는 부분(즉, A 부분)을 기준으로 하여 수술 동작부(40)가 피치 방향 동작을 할 수 있게 된다. 한편, 도 3c는 본 발명의 일 실시예에 따른 수술 동작부(40)가 제4 로봇 암(38)의 종축과 평행하게 서지 방향 동작을 하는 것을 나타내는 도면이다. 제1 내지 제4 로봇 암(32, 34, 36, 38)에 의해 위치가 일단 결정된 수술 동작부(40)는 자체적으로 서지 방향 동작 및 롤 동작을 할 수 있다.
도 4a 및 도 4b는 본 발명의 일 실시예에 따른 수술 동작부(40)의 상세한 구성을 나타내는 도면이다. 도 4a 및 도 4b에 도시된 바와 같이, 수술 동작부(40)의 소정의 길이를 갖는 원통형의 본체(42) 내측으로는 내시경(50) 및 (바람직하게는, 복수인) 최소 침습 수술 도구(100)가 하나의 다발로서 집속되어 배치될 수 있다. 이러한 내시경(50) 및 최소 침습 수술 도구(100)는 사용자의 조작에 따라 수술 동작부(40)에 배치될 수 있는 구동 장치(미도시됨)에 의해 구동되어 개별적으로 서지 방향 동작 및 롤 동작을 하게 될 수도 있다.
한편, 도 5 및 도 6을 더 살펴본다. 도 5 및 도 6은 본 발명의 일 실시예에 따라 내시경(50, 50A) 및 최소 침습 수술 도구(100)가 하나의 다발로 집속되어 있는 예들을 나타내는 도면이다. 내시경(50, 50A) 및 최소 침습 수술 도구(100)는 하나의 다발로 집속되어 수술 동작부(40)에 배치되는 것이 바람직할 수 있다(보다 바람직하게는, 내시경(50, 50A) 및 최소 침습 수술 도구(100)는 하나의 다발로 집속된 채로 환자의 신체 내로 삽입될 수 있다). 이를 위하여, 도 5에 도시된 바와 같은 수술 포트(90)를 채용할 수 있다. 상기와 같은 수술 포트(90)에 관하여는 본 출원인의 한국특허출원 제2008-99872호의 명세서의 상세한 설명을 참고할 수 있다(상기 특허출원의 명세서는 그 전체로서 본 명세서에 편입된 것으로 간주되어야 한다). 여기서, 내시경(50, 50A)은 도 5에 도시된 바와 같이 직선 형태일 수 있지만, 도 6에 도시된 바와 같이, 한국특허출원 제2008-51248호, 제2008-61894호, 제2008-79126호 및 제2008-90560호에 기재되어 있는 관절 기능과 같은 다양한 절곡 기능이 추가된 내시경이나 절곡이 자유로운 연성 내시경 등일 수도 있다.
한편, 수술의 종류에 따라서는 사용자가 환자의 수술 부위를 위에서 비스듬한 방향으로 관찰하는 것이 유리할 수 있으므로, 사용자인 외과의사가 직접 육안으로 관찰하는 경우와 거의 유사하게 환자의 수술 부위를 관찰할 수 있도록 하기 위해, 도 7에 도시된 바와 같이 최소 침습 수술 도구(100)에 대하여 내시경(50B)이 소정의 경사각을 갖도록 할 수도 있다. 이러한 경사각은 사용자의 필요에 의해 설정될 수 있다.
한편, 수술 동작부(40)에 배치되는 내시경 중 관절 기능을 갖고 있는 내시경(50A)은 후술하는 바와 같이 구동 롤러에 연계될 수 있지만, 그렇지 않은 경우도 물론 상정할 수 있다.
도 8을 살펴본다. 도 8은 본 발명의 일 실시예에 따른 서브 암(60)과 구동부(80)의 구성을 나타내는 도면이다. 최소 침습 수술 도구(100)는 도 8에 도시된 바와 같은 직선형 관 형태인 서브 암(60)의 일단(구동부(80) 측의 단부)에 연결되어 배치될 수 있다. 여기서, 서브 암(60)의 일단으로부터는 장착부(70)가 배치되어 있고, 장착부(70)에는 홈(72), 직선홈(74) 및 덮개(76)가 형성되어 있으며, 다시 여기에 최소 침습 수술 도구(100)의 동작을 제어하기 위한 조작부(후술함)를 구동하기 위한 복수의 구동 롤러(82)를 포함하는 구동부(80)가 연결될 수 있다. 이러한 구동 롤러(82)는 공지의 여러 구동 장치에 의해 구동될 수 있다.
도 9a는 본 발명의 일 실시예에 따라 수술 동작부(40)에 최소 침습 수술 도구(100)가 배치되는 것을 나타내는 도면이다. 도 9b는 최소 침습 수술 도구(100)를 구동하기 위한 조작부(200)의 저면 사시도이다. 그리고, 도 9c는 구동부(80)와 조작부(200)의 연결 상태를 나타내는 단면도이다. 이하에서는, 도 8과 함께 도 9a 내지 도 9c를 참조하여, 최소 침습 수술 도구(100)의 배치에 대하여 더 상세히 설명하기로 한다.
앞서 설명된 바와 같이, 서브 암(60)의 단부로부터는 바람직하게는 복수의 구동 롤러(82)를 포함하는 구동부(80)가 배치될 수 있다. 최소 침습 수술 도구(100)의 제어를 위한 조작부(200)는 위와 같은 구동부(80)에 맞닿아 있을 수 있다. 한편, 장착부(70)와 조작부(200)에는 이들이 서로 결합될 수 있도록 하기 위한 홈(72)과 돌기(102) 그리고 직선 홈(74)과 직선 돌기(104)가 각각 형성될 수 있다. 또한, 홈(72)과 돌기(102) 그리고 직선 홈(74)과 직선 돌기(104)가 서로 결합된 후에는 덮개(76)가 덮일 수 있다.
이상에서 설명된 바와 같이 장착부(70)와 조작부(200)가 결합된 상태에서, 구동부(80)의 구동 롤러(82)의 회전이 조작부(200)의 구동 풀리(후술함)를 거쳐 최소 침습 수술 도구(100)로 전달되도록 하는 것이 필요할 수 있다. 이를 위해, 도 9c에 도시된 바와 같이, 조작부(200)를 구성하는 하나의 구동축(206)(후술하는 바와 같은 제6 구동축(206))의 일단에서 연결 롤러(256)가 조작부(200)의 외부로 노출되도록 배치한 후, 연결 롤러(256)가 구동부(80)의 하나의 구동 롤러(82)에 맞닿도록 함으로써, 구동 롤러(82)의 회전과 이에 따른 연결 롤러(256)의 회전에 따라 구동 풀리(216)가 회전하도록 할 수 있다. 이때, 구동 롤러(82)로부터 연결 롤러(256)로의 동력의 전달이 원활하도록 하기 위해 구동 롤러(82)와 연결 롤러(256)의 접촉면에는 홈과 돌기를 형성할 수 있다. 이상에서 조작부(200)를 구성하는 구동축 중 후술하는 제6 구동축(206) 근방의 구동 롤러(82)와 연결 롤러(256)의 결합을 설명하였으나, 상기와 같은 결합은 조작부(200)를 구성하는 다른 구동축의 근방에서도 동일하게 이루어질 수 있다.
참고로, 도 9a에는 위에서 언급한 한국특허출원 제2008-90560호에 기재되어 있는 일 실시예에 따른 최소 침습 수술 도구(100)가 도시되어 있으나, 이 외의 다른 최소 침습 수술 도구, 즉, 상기 언급된 다른 한국특허출원에 기재되어 있는 각 실시예에 따른 수술 도구 등이 다양하고도 자유롭게 배치되어 사용될 수 있다. 즉, 수술 동작부(40)에 사용되는 최소 침습 수술 도구의 선택은 사용자에 의해 자유롭게 이루어질 수 있다.
이하에서는, 최소 침습 수술 도구(100)가 수술 동작부(40)에 배치되어 동작하도록 하는 조작부(200)의 구성에 주로 중점을 두어 본 발명의 다양한 실시예들에 관하여 살펴보기로 한다.
최소 침습 수술 도구 및 조작부의 구성
제1 실시예
도 10a는 본 발명에서 사용되는 최소 침습 수술 도구(100)의 예를 나타내는 사시도이다.
최소 침습 수술 도구(100)에서는 샤프트(110)(즉, 주 샤프트)의 일단으로 제1 및 제2 동작 샤프트(120, 130)가 각각 제1 및 제2 요 동작부(112, 122)에 의해 도시된 바와 같이 연결되어 있고, 제2 동작 샤프트(130)의 단부에는 피치 동작부(132)에 의해 엔드 이펙터(140)가 연결되어 있다. 그리고, 샤프트(110)의 타단으로는 제1 및 제2 동작 샤프트(120, 130)와 엔드 이펙터(140)를 동작시키기 위한 조작부(200)가 배치되어 있다.
본 실시예에서 샤프트(110)의 일단으로부터 연결되는 제1 및 제2 동작 샤프트(120, 130) 및 엔드 이펙터(140)와 이에 연결되는 요 케이블(YC), 제1 및 제2 피 치 케이블(PC1, PC2) 등에 관한 구성은 한국특허출원 제2008-90560호의 발명의 상세한 설명의 제1 실시예로부터 참고할 수 있으므로, 여기에서는 상세한 설명은 생략하기로 한다.
조작부(200)의 구성을 더 살펴보기로 한다.
도 10b와 도 10c는 본 발명의 제1 실시예에 따른 조작부(200)의 구성을 서로 다른 방향에서 나타내는 사시도로서, 도시된 바에 따르면 제1 내지 제6 구동축(201~206)과 제1 내지 제6 동작축(221~226)이 각각 순서대로 서로 평행하게 대향하여 배치되어 있고, 각각의 구동축과 동작축 중 첫 번째 축 외에는 케이블이 감겨질 수 있는 제2 내지 제6 구동 풀리(212~216)와 제2 내지 제6 동작 풀리(232~236)가 배치되어 상기 축들을 중심으로 하여 회전할 수 있다(첫 번째 축의 풀리에 관하여는 다른 실시예에서 설명하기로 한다). 또한, 각각의 구동축은 구동 롤러(82)에 연결되어 구동 롤러(82)의 회전을 전달 받을 수 있다. 한편, 상기와 같은 구동축이나 동작축의 각각의 풀리는 풀리에 감겨지는 케이블들이 서로 간섭하는 것을 방지하기 위하여 서로 다른 높이로 배치될 수 있다.
그리고, 서로 대향하는 구동 풀리와 동작 풀리는 구동량과 동작량이 동일하도록 하기 위해 서로 동일한 지름을 갖도록 형성될 수 있지만, 구동 풀리와 동작 풀리의 지름을 서로 다르게 설정하여 구동량과 동작량이 서로 다르게 되도록 할 수도 있다. 또한, 구동 풀리와 동작 풀리는 각각에 감겨지는 케이블의 폭을 고려하여 적절한 폭을 갖도록 형성될 수 있다.
요 케이블(YC)과 제1 및 제2 피치 케이블(PC1, PC2)이 조작부(200)에서 상기 와 같은 구동 풀리와 동작 풀리에 연결된 상태를 더 설명하면 다음과 같다.
제2 동작 풀리(232)는 요 케이블(YC)에 의해 제1 요 동작부(112)로 연결되어 있어, 제2 동작 풀리(232)의 회전에 따라 제1 동작 샤프트(120)가 요 방향으로 동작하도록 제어할 수 있다. 이때, 제2 동작 풀리(232)는 다른 케이블에 의해 제2 구동 풀리(212)에 연결되어 있어서 제2 구동 풀리(212)의 회전을 전달 받을 수 있다.
한편, 제3 동작 풀리(233)는 제2 피치 케이블(PC2)에 의해 제1 요 동작부(112), 제2 요 동작부(122) 및 피치 동작부(132)로 연결되어 있다. 이때, 제3 동작 풀리(233)는 제2 피치 케이블(PC2)에 의해 제3 구동 풀리(213)에 연결되어 있어서 제3 구동 풀리(213)의 회전을 전달 받을 수 있다. 제2 피치 케이블(PC2)의 일단은 제3 구동 풀리(213)에 고정되어 있을 수 있다. 위와 같은 제2 피치 케이블(PC2)의 타단은 제5 동작 풀리(235)를 거쳐 제5 구동 풀리(215)에 연결될 수 있다.
한편, 제4 동작 풀리(234)는 제1 피치 케이블(PC1)에 의해 제1 요 동작부(112), 제2 요 동작부(122) 및 피치 동작부(132)로 연결되어 있다. 이때, 제4 동작 풀리(234)는 제1 피치 케이블(PC1)에 의해 제4 구동 풀리(214)에 연결되어 있어서 제4 구동 풀리(214)의 회전을 전달 받을 수 있다. 제1 피치 케이블(PC1)의 일단은 제4 구동 풀리(214)에 고정되어 있을 수 있다. 위와 같은 제1 피치 케이블(PC1)의 타단은 제6 동작 풀리(236)를 거쳐 제6 구동 풀리(216)에 연결될 수 있다.
상기와 같은 케이블 연결 구성을 갖는 조작부(200)에 의한 제1 및 제2 동작 샤프트(120, 130)와 엔드 이펙터(140)의 동작에 대해 상세히 살펴보기로 한다.
우선, 제1 동작 샤프트(120)를 샤프트(110)에 대하여 요 방향 우측으로 회전시키는 메커니즘은 다음과 같다.
제2 구동 풀리(212)가 시계 방향으로 회전하게 되면 제2 구동 풀리(212)의 회전은 제1 요 동작부(112)의 요 케이블 풀리(미도시됨)로 전달되고, 이에 따라 요 케이블 풀리(미도시됨)가 회전하면 제1 동작 샤프트(120)가 요 방향 우측으로 회전하게 된다.
이때, 제3 및 제5 구동 풀리(213, 215)는 제2 피치 케이블(PC2)이 조작부(200)로부터 풀어지는 방향으로 회전하고, 제4 및 제6 구동 풀리(214, 216)는 제1 피치 케이블(PC1)이 조작부(200)로 당겨지는 방향으로 회전하도록 함으로써, 제2 동작 샤프트(130)가 제1 동작 샤프트(120)에 대하여 일관된 위치를 유지하도록 할 수 있다.
제2 동작 샤프트(130)를 제1 동작 샤프트(120)에 대하여 요 방향 좌측으로 회전시키는 메커니즘은 다음과 같다.
우선, 제2 구동 풀리(212)는 고정시켜 제1 요 동작부(112)의 요 케이블 풀리(미도시됨)가 회전하지 않도록 함으로써, 제1 동작 샤프트(120)가 회전하지 않도록 한다. 이 상태에서 제3 및 제5 구동 풀리(213, 215)는 제2 피치 케이블(PC2)을 조작부(200)로 당기는 방향으로 회전하고, 제4 및 제6 구동 풀리(214, 216)는 제1 피치 케이블(PC1)이 조작부(200)로부터 풀어지는 방향으로 회전하게 될 수 있다. 이에 따라, 제2 동작 샤프트(130)가 제1 동작 샤프트(120)에 대하여 요 방향 좌측으로 회전하게 된다.
엔드 이펙터(140)를 피치 방향에서 아래쪽으로 회전시키는 메커니즘은 다음과 같다.
우선, 제2 구동 풀리(212)는 고정시켜 제1 요 동작부(112)의 요 케이블 풀리(미도시됨)가 회전하지 않도록 함으로써, 제1 동작 샤프트(120)가 회전하지 않도록 한다. 이 상태에서 제2 및 제1 피치 케이블(PC2, PC1)이 연결되어 있는 제3 및 제4 구동 풀리(213, 214)는 제2 및 제1 피치 케이블(PC2, PC1)을 조작부(200)로 당기는 방향으로 회전하고, 제5 및 제6 구동 풀리(215, 216)는 제2 및 제1 피치 케이블(PC2, PC1)이 조작부(200)로부터 풀어지는 방향으로 회전하게 될 수 있다. 이렇게 되면, 제2 동작 샤프트(130)는 회전하지 않게 되는 반면, 제1 및 제2 피치 케이블(PC1, PC2)이 연결되어 있는 엔드 이펙터(140)는 그 두 로드가 동시에 피치 방향 아래쪽으로 향하게 된다.
이상의 설명에서 도 10a에 도시되어 있는 최소 침습 수술 도구(100)의 동작 예를 중심으로 하여 설명하였으나, 설명된 바와 같은 원리의 메커니즘을 통해 상기한 동작 예와는 다른 동작이 구현될 수도 있음은 당업자에게 자명한 것이다.
제2 실시예
도 11a는 본 발명에서 사용되는 최소 침습 수술 도구(100A)의 다른 예를 나타내는 사시도이다.
최소 침습 수술 도구(100A)의 구성은 기본적으로는 제1 실시예에 따른 최소 침습 수술 도구(100)와 유사하나, 엔드 이펙터(140A)의 구성이 엔드 이펙터(140)의 구성과 상이하다. 또한, 최소 침습 수술 도구(100A)에는 피치 케이블(PC), 제1 및 제2 요 케이블(YC1, YC2), 및 개폐 케이블(OC)이 구비되어 있다. 본 실시예의 구성은 한국특허출원 제2008-79126호의 발명의 상세한 설명의 제1 실시예로부터 참고할 수 있으므로, 여기에서는 상세한 설명은 생략하기로 한다.
조작부(200A)의 구성을 더 살펴보기로 한다.
도 11b 내지 도 11d는 본 발명의 제2 실시예에 따른 조작부(200A)의 구성을 서로 다른 방향에서 나타내는 사시도로서, 도시된 바에 따르면 제1 내지 제6 구동축(201A~206A)과 제1 내지 제3 동작축(221A~223A)이 서로 평행하게 배치되어 있다. 그리고, 여기서 제1 내지 제3 동작축(221A~223A)은 각각 순서대로 제3 내지 제5 구동축(203A~205A)에 대향하여 배치되어 있을 수 있다. 서로 대향하여 배치되어 있는 구동축과 동작축에 각각 구비되는 제3 내지 제5 구동 풀리(213A~215A)와 제1 내지 제3 동작 풀리(231A~233A)는 상기 축들을 중심으로 하여 회전할 수 있다. 구동축에 구동 롤러(82)가 연결될 수 있다는 점은 앞서 설명된 실시예에서와 같다. 이는 후술하는 실시예에도 적용될 수 있다.
또한, 이전의 실시예에서와 마찬가지로, 구동축이나 동작축의 각각의 풀리는 풀리에 감겨지는 케이블들이 서로 간섭하는 것을 방지하기 위하여 서로 다른 높이로 배치될 수 있다.
구동 풀리와 동작 풀리의 지름이나 폭은 앞서 설명된 실시예에서와 마찬가지로 설정될 수 있다.
단, 본 실시예에 따르면, 제1 내지 제3 동작 풀리(231A~233A)는 각각 한 쌍의 풀리로 이루어질 수 있다. 각 동작 풀리의 하부의 풀리는 구동축으로부터의 구동력을 전달 받기 위한 풀리이고, 각 동작 풀리의 상부의 풀리는 전달 받은 구동력을 샤프트(100A)의 반대측으로 전달하기 위한 풀리이다.
개폐 케이블(OC), 피치 케이블(PC), 및 제1 및 제2 요 케이블(YC1, YC2)이 조작부(200A)에서 상기와 같은 구동 풀리와 동작 풀리에 연결된 상태를 설명하면 다음과 같다.
제2 구동 풀리(212A)에는 도시된 바와 같이 개폐 케이블(OC)의 일단이 연결 고정된 채로 감겨질 수 있다. 이러한 개폐 케이블(OC)의 타단은 엔드 이펙터(140A)로 연결되어 있어, 제2 구동 풀리(212A)의 회전에 따라 개폐 케이블(OC)이 당겨지면 엔드 이펙터(140A)가 폐쇄되고, 개폐 케이블(OC)이 이완되면 엔드 이펙터(140A)가 그 스프링에 의한 복원력에 의해 개방될 수 있다.
한편, 제1 동작 풀리(231A)는 피치 케이블(PC)에 의해 피치 동작부(132A)로 연결되어 있다. 이때, 제1 동작 풀리(231A)는 다른 케이블에 의해 제3 구동 풀리(213A)에 연결되어 있어서 제3 구동 풀리(213A)의 회전을 전달 받을 수 있다.
그리고, 제2 및 제3 동작 풀리(232A, 233A)의 상부 풀리에는 각각 제1 및 제2 요 케이블(YC1, YC2)이 각각 연결되어 있다. 이러한 제2 및 제3 동작 풀리(232A, 233A) 역시 각각 제4 및 제5 구동 풀리(214A, 215A)에 의해 구동될 수 있다.
상기와 같은 케이블 연결 구성을 갖는 조작부(200A)에 의한 제1 및 제2 동작 샤프트(120A, 130A)와 엔드 이펙터(140A)의 동작에 대해 상세히 살펴보기로 한다.
우선, 제1 동작 샤프트(120A)를 샤프트(110A)에 대하여 요 방향 우측으로 회전시키는 메커니즘은 다음과 같다.
개폐 케이블(OC)과 피치 케이블(PC)이 각각 연결되어 있는 제2 구동 풀리(212A)와 제3 구동 풀리(213A)가 어느 방향으로도 회전하지 않도록 고정된 상태에서, 제4 구동 풀리(214A)와 제5 구동 풀리(215A)가 시계 방향으로 회전하도록 하면, 제1 및 제2 요 케이블(YC1, YC2)이 연결되어 있는 제1 동작 풀리(231A)와 제2 동작 풀리(232A)는 우측의 제1 및 제2 요 케이블(YC1, YC2)은 조작부(200A)로 당기고, 좌측의 제1 및 제2 요 케이블(YC1, YC2)은 조작부(200A)로부터 풀어지도록 하므로, 제1 동작 샤프트(120A)가 요 방향 우측으로 회전하게 된다.
제2 동작 샤프트(130A)를 제1 동작 샤프트(120A)에 대하여 요 방향 좌측으로 회전시키는 메커니즘은 다음과 같다.
제2 구동 풀리(212A), 제3 구동 풀리(213A) 및 제4 구동 풀리(214A)가 어느 방향으로도 회전하지 않도록 고정된 상태에서, 제5 구동 풀리(215A)가 반시계 방향으로 회전하도록 하면, 제3 동작 풀리(233A)도 반시계 방향으로 회전하게 되고, 이에 따라 제3 동작 풀리(233A) 좌측의 제2 요 케이블(YC2)은 조작부(200A)로 당겨지고, 우측의 제2 요 케이블(YC2)은 조작부(200A)로부터 풀어지게 된다. 이에 따라, 제2 동작 샤프트(130A)는 제1 동작 샤프트(120A)에 대하여 요 방향 좌측으로 회전하게 된다.
엔드 이펙터(140A)를 피치 방향에서 아래쪽으로 회전시키는 메커니즘은 다음 과 같다.
제2 구동 풀리(212A), 제4 구동 풀리(214A) 및 제5 구동 풀리(215A)는 어느 방향으로도 회전하지 않도록 고정시키고, 피치 케이블(PC)이 연결되어 있는 제3 구동 풀리(213A)는 시계 방향으로 회전하도록 하면, 아래쪽의 피치 케이블(PC)은 당겨지게 되고, 위쪽의 피치 케이블(PC)은 이와 반대로 풀어지게 되어 엔드 이펙터(140A)는 피치 방향에서 아래쪽으로 회전하게 된다.
이상의 설명에서 도 11a에 도시되어 있는 최소 침습 수술 도구(100A)의 동작 예를 중심으로 하여 설명하였으나, 설명된 바와 같은 원리의 메커니즘을 통해 상기한 동작 예와는 다른 동작이 구현될 수도 있음은 당업자에게 자명한 것이다.
제3 실시예
도 12a는 본 발명에서 사용되는 최소 침습 수술 도구(100B)의 또 다른 예를 나타내는 사시도이다.
최소 침습 수술 도구(100B)의 구성은 기본적으로는 앞서 설명된 실시예에 따른 최소 침습 수술 도구(100, 100A)와 유사하나, 엔드 이펙터(140B)를 제2 동작 샤프트(130B)에 연결하는 연결부(132B)의 구성이 특징적이다. 또한, 제1 및 제2 피치 케이블(PC1, PC2)과 제1 및 제2 요 케이블(YC1, YC2)이 구비되어 있다. 본 실시예의 구성은 한국특허출원 제2008-90560호의 발명의 상세한 설명의 제5 실시예로부터 참고할 수 있으므로, 여기에서는 상세한 설명은 생략하기로 한다.
조작부(200B)의 구성을 더 살펴보기로 한다.
도 12b 내지 도 12d는 본 발명의 제3 실시예에 따른 조작부(200B)의 구성을 서로 다른 방향에서 나타내는 사시도로서, 도시된 바에 따르면 제1 내지 제6 구동축(201B~206B)과 제1 내지 제6 동작축(221B~226B)이 각각 순서대로 서로 평행하게 대향하여 배치되어 있다. 또한, 이러한 축들에는 도시된 바와 같은 그리고 앞서 설명된 실시예에서와 유사한 기능과 구성상의 특성을 갖는 구동 풀리 및 동작 풀리가 배치되어 있다.
제1 및 제2 피치 케이블(PC1, PC2)과 제1 및 제2 요 케이블(YC1, YC2)이 상기와 같은 구동 풀리와 동작 풀리에 연결된 상태를 설명하면 다음과 같다.
먼저, 제2 요 케이블(YC2)은 제1 구동 풀리(211B)에 연결 고정된 상태에서 제1 구동 풀리(211B)에 루프(loop)의 형태로 2회 정도 감긴 후, 제1 동작 풀리(231B)를 거쳐 각각의 타단이 제2 요 동작부(122B)에 연결 고정될 수 있다. 여기서, 제2 요 케이블(YC2)은 제1 구동 풀리(211B)에 2회 감김에 따라 제1 요 케이블(YC1)과 서로 간섭을 일으키지 않을 수 있게 된다. 이러한 제2 요 케이블(YC2)을 매개로 하여 제1 동작 풀리(231B)는 제2 동작 샤프트(130B)의 요 방향 동작을 제어할 수 있게 된다.
그 다음에, 제1 요 케이블(YC1)은 제2 동작 풀리(232B)와 제1 요 동작부(112B)를 연결하여 제2 동작 풀리(232B)의 회전에 따라 제1 동작 샤프트(120)가 요 방향으로 동작하도록 할 수 있다. 이때, 제2 동작 풀리(232B)는 다른 케이블을 매개로 하여 제2 구동 풀리(212B)에 의해 구동될 수 있다.
한편, 제1 및 제2 피치 케이블(PC1, PC2)는 앞서 도 10b 및 도 10c를 참조하여 설명된 제1 실시예에서의 제1 및 제2 피치 케이블(PC1, PC2)과 동일한 연결 상 태를 갖는다. 이러한 제1 및 제2 피치 케이블(PC1, PC2)은 연결부(132B)의 피치 방향 동작 관절과 요 방향 동작 관절을 한국특허출원 제2008-90560호의 발명의 상세한 설명의 제5 실시예에서 설명된 바와 같이 제어하여 엔드 이펙터(140B)의 피치 방향 및 요 방향의 동작을 제어할 수 있다.
상기와 같은 케이블 연결 구성을 갖는 조작부(200B)에 의한 제1 및 제2 동작 샤프트(120B, 130B)와 엔드 이펙터(140B)의 동작에 대해 상세히 살펴보기로 한다.
우선, 제1 동작 샤프트(120B)를 샤프트(110B)에 대하여 요 방향 우측으로 회전시키는 메커니즘은 다음과 같다.
제1 및 제2 구동 풀리(211B, 212B)가 시계 방향으로 회전하도록 하면, 제1 및 제2 구동 풀리(211B, 212B)의 회전은 제1 및 제2 동작 풀리(231B, 232B)에 연결되어 있는 제2 및 제1 요 케이블(YC2, YC1)을 통해 제1 요 동작부(112B)의 요 케이블 풀리(미도시됨)와 연결 풀리(미도시됨)로 각각 전달되어 제1 동작 샤프트(120B)가 요 방향 우측으로 회전하게 된다. 이 경우 제1 요 동작부(112B)의 요 케이블 풀리(미도시됨)의 양단에 배치되는 연결 풀리(미도시됨)는 요 케이블 풀리(미도시됨)에 대하여 독립적으로 회전할 수 있지만, 제1 동작 샤프트(120B)의 동작에 의해 다른 구성요소가 영향을 받지 않도록 하기 위해 제3 및 제5 구동 풀리(213B, 215B)는 제2 피치 케이블(PC2)이 풀리는 방향으로 회전되도록 하고, 제4 및 제6 구동 풀리(214B, 216B)는 제1 피치 케이블(PC1)이 당겨지는 방향으로 회전되도록 할 수 있다.
제2 동작 샤프트(130B)를 제1 동작 샤프트(120B)에 대하여 요 방향 좌측으로 회전시키는 메커니즘은 다음과 같다.
우선, 제2 구동 풀리(212B)는 고정시켜 상기 요 케이블 풀리(미도시됨)가 회전하지 않도록 함으로써 제1 동작 샤프트(120B)가 회전하지 않도록 한다.
이 상태에서 제2 요 케이블(YC2)이 연결되어 있는 제1 구동 풀리(211B)가 반시계 방향으로 회전하면, 제2 요 케이블(YC2)의 일단이 연결 고정되어 있는 제2 동작 샤프트(130B)는 조작부(200B) 방향으로 당겨진다.
그리고, 제2 피치 케이블(PC2)이 연결되어 있는 제3 및 제5 구동 풀리(213B, 215B)는 제2 피치 케이블(PC2)이 조작부(200B) 방향으로 당겨지도록 회전시키고, 제4 및 제6 구동 풀리(214B, 216B)는 제1 피치 케이블(PC1)이 조작부(200B)로부터 풀어지는 방향으로 회전되도록 함으로써, 제2 동작 샤프트(130B)가 제1 동작 샤프트(120B)에 대하여 요 방향 좌측으로 회전하게 된다.
그리고, 엔드 이펙터(140)를 연결부(132B)를 기준으로 하여 요 방향 좌측으로 회전시키는 메커니즘은 다음과 같다.
우선, 제1 및 제2 구동 풀리(211B, 212B)는 고정시켜 제2 및 제1 요 케이블(YC2, YC1)이 동작하지 않도록 한다.
이 상태에서, 제3 및 제5 구동 풀리(213B, 215B)는 제2 피치 케이블(PC2)이 조작부(200B) 방향으로 당겨지는 방향으로 회전되도록 하고, 제4 및 제6 구동 풀리(214B, 216B)는 제1 피치 케이블(PC1)이 조작부(200B)로부터 풀어지는 방향으로 회전되도록 한다.
제1 및 제2 요 케이블(YC1, YC2)이 고정된 상태에서는 제1 및 제2 동작 샤프트(120B, 130B)가 회전하지 않기 때문에 제1 및 제2 피치 케이블(PC1, PC2)의 동작에 의해 엔드 이펙터(140B)는 연결부(132B)를 기준으로 하여 요 방향 좌측으로 회전하게 된다.
엔드 이펙터(140B)를 피치 방향에서 아래쪽으로 회전시키는 메커니즘은 다음과 같다.
우선, 제1 및 제2 구동 풀리(211B, 212B)는 고정시켜 제1 동작 샤프트(120B)와 제2 동작 샤프트(130B)가 회전하지 않도록 한다.
제2 및 제1 피치 케이블(PC2, PC1)이 연결되어 있는 제3 및 제4 구동 풀리(213B, 214B)는 제2 및 제1 피치 케이블(PC2, PC1)이 조작부(200B) 방향으로 당겨지도록 회전시키고, 제5 및 제6 구동 풀리(215B, 216B)는 제2 및 제1 피치 케이블(PC2, PC1)이 조작부(200B)로부터 풀어지는 방향으로 회전되도록 하면, 제1 및 제2 동작 샤프트(120B, 130B)는 회전하지 않는 상태가 되고, 제1 및 제2 피치 케이블(PC1, PC2)이 연결되어 있는 엔드 이펙터(140B)의 한 쌍의 로드는 동시에 아래쪽으로 향하게 되어, 엔드 이펙터(140B)가 피치 방향에서 아래쪽으로 회전하게 된다.
이상의 설명에서 도 12a에 도시되어 있는 최소 침습 수술 도구(100B)의 동작 예를 중심으로 하여 설명하였으나, 설명된 바와 같은 원리의 메커니즘을 통해 상기한 동작 예와는 다른 동작이 구현될 수도 있음은 당업자에게 자명한 것이다.
제4 실시예
도 13a는 본 발명에서 사용되는 최소 침습 수술 도구(100C)의 또 다른 예를 나타내는 사시도이다.
최소 침습 수술 도구(100C)의 구성은 기본적으로는 앞서 설명된 실시예에 따른 최소 침습 수술 도구(100, 100A. 100B)와 유사하나, 엔드 이펙터(140C)를 피치 동작부(134C)와 함께 제2 동작 샤프트(130C)에 연결하는 제3 요 동작부(132C)의 구성이 특징적이다. 또한, 피치 케이블(PC), 제1, 제2 및 제3 요 케이블(YC1, YC2, YC3), 및 개폐 케이블(OC)이 구비되어 있다. 본 실시예의 구성은 한국특허출원 제2008-79126호의 발명의 상세한 설명의 제4 실시예로부터 참고할 수 있으므로, 여기에서는 상세한 설명은 생략하기로 한다.
조작부(200C)의 구성을 더 살펴보기로 한다.
도 13b 내지 도 13d는 본 실시예에 따른 조작부(200C)의 구성을 서로 다른 방향에서 나타내는 사시도로서, 도시된 바에 따르면 제1 내지 제6 구동축(201C~206C)과 제1 내지 제3 동작축(221C~223C), 그리고 제3 내지 제5 구동 풀리(213C~215C)와 제1 내지 제3 동작 풀리(231C~233C)의 배치나 구성은 앞서 설명된 제2 실시예에서와 유사하다.
본 실시예에서 제2 실시예에서와 다른 점은 주로 제4 동작축(224C)이 제6 구동축(206C)에 대향하여 배치되어 있고 제4 동작 풀리(234C)가 제4 동작축(224C)에 배치되어 제6 구동 풀리(216C)에 의해 구동될 수 있다는 것이다.
이상과 같은 제4 동작 풀리(234C)는 제3 요 케이블(YC3)을 통해 제3 요 동작부(132C)를 구동하여 엔드 이펙터(140C)의 동작이 요 방향에서 더 제어될 수 있도록 한다.
제5 실시예
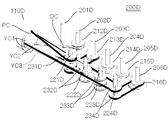
도 14a는 본 발명에서 사용되는 최소 침습 수술 도구(100D)의 또 다른 예를 나타내는 사시도이다.
최소 침습 수술 도구(100D)의 구성은 기본적으로는 앞서 설명된 실시예에 따른 최소 침습 수술 도구(100, 100A, 100B, 100C)와 유사하나, 제1 및 제2 요 케이블(YC1, YC2)이 그에 대응되는 동작 풀리(233D, 232D)에 감겨지는 구성이 상이하다. 본 실시예의 구성은 한국특허출원 제2008-79126호의 발명의 상세한 설명의 제5 실시예로부터 참고할 수 있으므로, 여기에서는 상세한 설명은 생략하기로 한다.
조작부(200D)에서의 제1 및 제2 요 케이블(YC1, YC2)의 감김에 관하여 도 14b 내지 도 14d(특히, 도 14d)를 참조하여 더 살펴보면, 제1 및 제2 요 케이블(YC1, YC2)이 각각 감겨지는 제3 동작 풀리(233D)와 제2 동작 풀리(232D)가 각각 복렬 풀리나 이중 풀리로 형성되어 있어서 제1 및 제2 요 케이블(YC1, YC2)이 제3 요 케이블(YC3)을 중심으로 하여 양쪽으로 감겨지는 것을 알 수 있다.
제6 실시예
도 15는 본 발명에서 사용되는 최소 침습 수술 도구(100E)의 또 다른 예를 나타내는 사시도이다. 본 실시예에 따르면, 엔드 이펙터(140E)로서 개폐가 불가능한 후크형 전극이 채용되어 있는 점을 제외하고는 앞서 설명된 제3 실시예에서와 동일한 구성이 도출된다. 이때에, 엔드 이펙터(140E)는 그것이 개폐될 필요가 없는 것인 이상, 사용자의 필요에 따라 얼마든지 다양하게 그 형상이 결정될 수 있다.
한편, 도 16은 본 발명에서 사용되는 최소 침습 수술 도구(100F)의 또 다른 예를 나타내는 사시도이다. 본 실시예에 따르면, 엔드 이펙터(140F)로서 후크형 전극이 채용되어 개폐 케이블이 필요 없다는 점을 제외하고는 앞서 설명된 제5 실시예에서와 동일한 구성이 도출된다.
주 제어부의 구성
도 17은 본 발명에 따른 여러 실시예에서 사용되는 최소 침습 수술 도구(100)의 조작부(200)를 제어하기 위해 사용되는 주 제어부(300)의 구성을 나타내는 사시도이다. 도시된 바에 따르면, 주 제어부(300)는 소정의 높이를 갖도록 형성되는 테이블(310), 내시경(50)에 의해 얻어진 영상을 표시하는 모니터(320), 내시경의 동작을 제어하기 위한 제1 조이스틱(330a), 로봇 암(30)의 동작을 제어하여 수술 동작부(40)의 위치 등을 제어하기 위한 제2 조이스틱(330b), 최소 침습 수술 도구(100)의 동작을 제어하기 위한 한 쌍의 조절 손잡이부(340) 및 최소 침습 수술 도구(100)의 소정 동작을 단속할 수 있는 한 쌍의 페달(350)을 포함할 수 있다. 그러나, 이와 같은 주 제어부(300)는 그것이 로봇 암(30), 수술 동작부(40), 그리고 수술 동작부(40)에 배치되는 내시경(50) 및 최소 침습 수술 도구(100)를 사용자의 의사에 따라 동작시킬 수 있도록 하는 것이라면 도시된 구성에 한정되지 않고 다양하게 그 구성이 변경될 수 있다.
이하에서는, 도면을 참조하여 제1 조이스틱(330a), 제2 조이스틱(330b) 및 조절 손잡이부(340)에 의한 동작 제어에 대해 더 살펴보기로 한다.
도 18a는 제1 및 제2 조이스틱(330a, 330b)의 동작 방향을 나타내는 도면이고, 도 18b는 제1 조이스틱(330a)에 의해 구동되는 내시경(50)의 동작 방향을 나타 내는 도면이며, 도 18c는 제2 조이스틱(330b)에 의해 구동되는 로봇 암(30)에 의한 수술 동작부(40)의 동작 방향을 나타내는 도면이다.
우선, 제1 조이스틱(330a) 및 제2 조이스틱(330b)의 구성에 대해 살펴보기로 한다.
도시된 바에 따르면, 제1 및 제2 조이스틱(330a, 330b)은 소정의 길이를 갖는 축(332a, 332b)의 단부에 다이얼 형태의 손잡이(334a, 334b)가 연결되는 형태로 구성되어 있어서, 제1 조이스틱(330a)은 손잡이(334a)를 이용하여 축(332a)을 서지 방향 및 롤 방향으로 조작할 수 있게 되어 있고, 제2 조이스틱(330b)은 손잡이(334b)를 이용하여 축(332b)을 서지 방향, 피치 방향, 요 방향 및 롤 방향으로 조작할 수 있게 되어 있다.
조이스틱의 동작에 따른 수술 동작부(40)와 내시경(50)의 동작을 살펴보기로 한다.
사용자는 제2 조이스틱(330b)을 자신의 의도에 따라 도 18a에 도시된 바와 같이 서지 방향, 피치 방향, 요 방향 및/또는 롤 방향으로 조작할 수 있다. 즉, 사용자는 제2 조이스틱(330b)의 조작에 의해 로봇 암(30)을 구성하는 제1 내지 제4 로봇 암(32, 34, 36, 38)을 구동함으로써 도 18c에 도시된 바와 같이 수술 동작부(40)의 동작이 서지 방향, 피치 방향, 요 방향 및/또는 롤 방향으로 제어되도록 할 수 있다.
또한, 사용자는 제1 조이스틱(330a)을 서지 방향 및 롤 방향으로 조작할 수 있다. 제1 조이스틱(330a)의 조작에 의해 도 18b에 도시된 바와 같은 수술 동작 부(40)의 내시경(50)의 서지 방향 동작 및 롤 동작을 제어할 수도 있다. 단, 서지 방향과 롤 방향으로만 제어 가능한 제1 조이스틱(330a)을 사용하는 경우에는 관절 기능이 없는 경성 내시경만을 사용할 수 있으므로, 관절 기능이 있는 내시경을 채용하는 경우에는, 제1 조이스틱(330a)도 제2 조이스틱(330b)과 같이 서지 방향, 피치 방향, 요 방향 및/또는 롤 방향으로 조작할 수 있는 형태인 것이 바람직하다.
이하에서는, 도면을 참조하여 조절 손잡이부(340)에 의한 최소 침습 수술 도구(100)의 동작 제어에 관하여 살펴 보기로 한다.
조절 손잡이부(340)는 최소 침습 수술 도구(100)의 동작을 제어하기 위해 채용되므로 조절 손잡이부(340)의 개수는 최소 침습 수술 도구(100)의 개수와 동일할 수 있다. 즉, 도 17에 도시된 바와 같이, 조절 손잡이부(340)는 한 쌍, 두 개가 사용될 수 있다. 그러나, 조절 손잡이의 개수가 너무 많아지게 되면 사용자가 수술 시에 혼란스러움을 느낄 수 있으므로, 사용자가 페달(350)을 이용하여 조절 손잡이부(340)에 의해 제어되는 최소 침습 수술 도구(100)를 선택하도록 할 수도 있다.
도 19a에 도시된 바와 같이, 조절 손잡이부(340)는 제1, 제2 및 제3 조작 로드(344a, 344b, 344c)가 제1 및 제2 요 회전축(346a, 346b)에 의해 연속적으로 연결되어 있고, 홀이 형성된 제1 로드(342a)와 제2 로드(342b)가 소정의 회전축에 의해 서로 연결된 후, 이것들이 다시 제3 조작 로드(344c)의 일단에서 피치 회전축(346c)에 의해 연결되어 구성될 수 있다.
이러한 조절 손잡이부(340)를 사용자가 조작함에 따라 제1 및 제2 로 드(342a, 342b)는 피치 회전축(346c)을 따라 피치 방향으로 동작할 수 있게 되고, 제1 조작 로드(344a)는 서지 방향 및 롤 방향으로 동작할 수 있게 되며, 제2 및 제3 조작 로드(344b, 344c)는 제1 및 제2 요 회전축(346a, 3446b)을 따라 요 방향으로 동작할 수 있게 된다.
한편, 최소 침습 수술 도구(100)가 개폐 가능한 것인 경우에는, 사용자가 제1 로드(342a)와 제2 로드(342b)를 파지한 후 이들 간의 각거리가 증감되도록 하면, 엔드 이펙터(140)가 개폐될 수도 있다.
도 19b는 앞서 설명된 제5 실시예에 따른 최소 침습 수술 도구(100D)의 동작 방향을 나타내는 도면이다. 이를 들어 앞서 설명된 조절 손잡이부(340)의 동작 제어에 관하여 설명하면 다음과 같다. 즉, 조절 손잡이부(340)의 제1 조작 로드(344a)를 서지 방향 또는 롤 방향으로 조작하면 샤프트(110D)는 그에 대응하여 동작하게 된다. 또한, 제1 로드(342a)와 제2 로드(342b)의 조작에 의해 엔드 이펙터(140D)는 피치 방향으로 동작하거나 개폐될 수 있다. 그리고, 제2 및 제3 조작 로드(344b, 344c)의 조작에 의해 제1 및 제2 동작 샤프트(120D, 130D)는 요 방향(yaw1, yaw2)으로 동작할 수 있다. 또한, 조절 손잡이부(340)를 제1 로드(342a)와 제2 로드(342b)가 제3 조작 로드(344c)에 대하여 요 방향으로도 동작할 수 있도록 구성하면, 도 19b에 도시된 바와 같은 엔드 이펙터(140D)의 요 방향(yaw3) 동작도 가능하게 될 수 있다.
이와 같은 조절 손잡이부(340)의 조작에 의한 제1 및 제2 동작 샤프트(120D, 130D)의 요 방향(yaw1, yaw2) 동작 및 엔드 이펙터(140D)의 요 방향(yaw3) 동작 중 적어도 하나에 대한 선택은 후술하는 페달(350)의 조작에 의해 이루어질 수 있다.
이상에서는 주로 본 발명의 최소 침습 수술 도구의 제1 실시예 또는 제5 실시예의 경우를 상정하여 조절 손잡이부(340)의 구성과 동작에 관하여 살펴보았지만, 조절 손잡이부(340)의 구성을 그에 대응되는 최소 침습 수술 도구에 따라 변경 적용함으로써 본 발명의 다른 실시예에 따른 최소 침습 수술 도구에 관하여도 위와 마찬가지 원리에 의한 동작 제어가 가능함은 당업자에게 자명한 것이다.
마지막으로, 페달(350)의 기능에 관하여 살펴보기로 한다. 앞서 설명된 바와 같이, 조절 손잡이부(340)는 3개의 조작 로드가 2개의 요 방향 회전 관절에 의해 연결되는 구성이기 때문에 사용자는 자신의 조절 손잡이부(340)의 요 방향 회전 관절이 어느 요 동작부에 대응되는 것인지를 알고 선택할 수 있어야 한다. 즉, 제3 실시예 내지 제6 실시예에서와 같이 요 동작부나 이와 유사한 구성요소가 3개 이상인 경우에는 조절 손잡이(340)의 요 방향 회전 관절이 어느 요 동작부 또는 이와 유사한 구성요소에 대응되는 것인지를 사용자가 알고 이러한 대응을 변경할 수 있도록 하는 것이 바람직하다.
도 20의 경우를 예로 들어 설명하기로 한다. 여기서 도시된 최소 침습 수술 도구는 제3 실시예에 따른 최소 침습 수술 도구(100B)와 유사한 구성을 갖지만, 꼭 이에 한정될 필요는 없다.
우선, 사용자는 페달(350)을 밟음으로써 제1 또는 제2 요 회전축(346a, 346b)의 회전 관절에 대응되는 요 동작부를 선택할 수 있다. 예를 들면, 도 20에 도시된 바와 같이, 초기 상태(페달(350)을 조작하지 않은 상태, 도 20의 좌측 도면 의 경우)에서는 조절 손잡이부(340)의 제1 및 제2 요 회전축(346a, 346b)의 회전 관절이 각각 제1 및 제2 요 동작부(112B, 122B)에 대응하지만, 사용자가 페달(350)을 밟은 상태에서는 제1 및 제2 요 회전축(346a, 346b)의 회전 관절이 각각 제2 요 동작부(122B) 및 연결부(132B)에 대응하도록 할 수도 있다(도 20의 우측 도면의 경우).
물론 당업자는 상기 설명된 실시예에서와는 다르게 페달(350)을 이용할 수도 있다. 예를 들면, 요 동작부가 더 많은 경우에는 페달(350)을 밟는 횟수에 따라 조절 손잡이부(340)의 요 회전축의 회전 관절에 대응되는 요 동작부가 결정되도록 할 수도 있고, 조절 손잡이부(340)에 2개 이상의 요 회전축을 마련할 필요 없이 페달(350)의 조작만으로 사용자가 제어하고자 하는 요 동작부가 결정되도록 할 수도 있다.
또한, 수술 동작부(40)에 최소 침습 수술 도구(100)가 3개 이상 배치되는 경우에는 페달(350)을 밟는 횟수에 따라 좌우의 조절 손잡이부(340)가 각각 어느 최소 침습 수술 도구(100)에 대응되는 것인지를 사용자가 선택할 수 있게 할 수도 있다.
도 1은 본 발명의 일 실시예에 따른 수술용 로봇 시스템의 전체 구성을 나타내는 도면.
도 2는 본 발명의 일 실시예에 따른 수술용 로봇 시스템에 포함되는 동작 로봇의 전체적인 구성을 나타내는 사시도.
도 3a 및 도 3b는 본 발명의 일 실시예에 따른 여러 로봇 암의 구성 및 동작을 나타내는 도면.
도 3c는 본 발명의 일 실시예에 따른 수술 동작부가 제4 로봇 암의 종축과 평행하게 서지 방향 동작을 하는 것을 나타내는 도면.
도 4a 및 도 4b는 본 발명의 일 실시예에 따른 수술 동작부의 상세한 구성과 내시경 및 최소 침습 수술 도구의 수술 동작부에 대한 동작을 나타내는 도면.
도 5 및 도 6은 본 발명의 일 실시예에 따라 내시경 및 최소 침습 수술 도구가 하나의 다발로 집속되어 있는 예들을 나타내는 도면.
도 7은 본 발명의 일 실시예에 따라 내시경이 배치되어 있는 것을 나타내는 도면.
도 8은 본 발명의 일 실시예에 따른 서브 암과 구동부의 구성을 나타내는 도면.
도 9a는 본 발명의 일 실시예에 따라 수술 동작부에 최소 침습 수술 도구가 배치되는 것을 나타내는 도면.
도 9b는 본 발명의 일 실시예에 따른 최소 침습 수술 도구의 동작을 위한 조 작부의 저면 사시도.
도 9c는 본 발명의 일 실시예에 따른 구동부와 조작부의 연결 상태를 나타내는 단면도.
도 10a는 본 발명에서 사용되는 최소 침습 수술 도구의 예를 나타내는 사시도.
도 10b와 도 10c는 본 발명의 제1 실시예에 따른 조작부의 구성을 서로 다른 방향에서 나타내는 사시도.
도 11a는 본 발명에서 사용되는 최소 침습 수술 도구의 다른 예를 나타내는 사시도.
도 11b 내지 도 11d는 본 발명의 제2 실시예에 따른 조작부의 구성을 서로 다른 방향에서 나타내는 사시도.
도 12a는 본 발명에서 사용되는 최소 침습 수술 도구의 또 다른 예를 나타내는 사시도.
도 12b 내지 도 12d는 본 발명의 제3 실시예에 따른 조작부의 구성을 서로 다른 방향에서 나타내는 사시도.
도 13a는 본 발명에서 사용되는 최소 침습 수술 도구의 또 다른 예를 나타내는 사시도.
도 13b 내지 도 13d는 본 발명의 제4 실시예에 따른 조작부의 구성을 서로 다른 방향에서 나타내는 사시도.
도 14a는 본 발명에서 사용되는 최소 침습 수술 도구의 또 다른 예를 나타내 는 사시도.
도 14b 내지 도 14d는 본 발명의 제5 실시예에 따른 조작부의 구성을 서로 다른 방향에서 나타내는 사시도.
도 15는 본 발명에서 사용되는 최소 침습 수술 도구의 또 다른 예를 나타내는 사시도.
도 16은 본 발명에서 사용되는 최소 침습 수술 도구의 또 다른 예를 나타내는 사시도.
도 17은 본 발명에 따른 여러 실시예에서 사용되는 최소 침습 수술 도구의 조작부를 제어하기 위해 사용되는 주 제어부의 구성을 나타내는 사시도.
도 18a는 본 발명에 따른 주 제어부의 제1 및 제2 조이스틱의 동작 방향을 나타내는 도면.
도 18b는 본 발명에 따른 주 제어부의 제1 조이스틱에 의해 구동되는 내시경의 동작 방향을 나타내는 도면.
도 18c는 본 발명에 따른 주 제어부의 제2 조이스틱에 의해 구동되는 로봇 암에 의한 수술 동작부의 동작 방향을 나타내는 도면.
도 19a는 본 발명에 따른 주 제어부의 조절 손잡이의 동작 방향을 나타내는 도면.
도 19b는 본 발명의 제5 실시예에 따른 최소 침습 수술 도구의 동작 방향을 나타내는 도면.
도 20은 본 발명에 따른 주 제어부의 페달의 조작에 따른 최소 침습 수술 도 구의 동작 방향을 나타내는 도면.
<도면의 주요 부분에 대한 부호의 설명>
10: 동작 로봇
20: 베이스
30: 로봇 암
40: 수술 동작부
50, 50A, 50B: 내시경
70: 장착부
80: 구동부
90: 수술 포트
100, 100A, 100B, 100C, 100D, 100E, 100F: 최소 침습 수술 도구
200, 200A, 200B, 200C, 200D, 200E, 200F: 조작부
300: 주 제어부
330a: 제1 조이스틱
330b: 제2 조이스틱
340: 조절 손잡이부
350: 페달
Claims (21)
- 수술용 로봇 시스템으로서,다수의 로봇 암, 및수술 동작부를 포함하고,상기 수술 동작부는 상기 다수의 로봇 암 중 적어도 하나에 의해 피치 방향 또는 요 방향으로 제어될 수 있고,상기 수술 동작부는 적어도 하나의 최소 침습 수술 도구를 포함하며,상기 적어도 하나의 최소 침습 수술 도구는 주 샤프트, 제1 동작 샤프트, 제2 동작 샤프트, 엔드 이펙터 및 조작부를 포함하고,상기 조작부는 상기 제1 동작 샤프트, 상기 제2 동작 샤프트 및 상기 엔드 이펙터를 제어하며,베이스를 더 포함하고,상기 베이스는 수직 암 및 수평 암을 포함하며,상기 수직 암은 서지 방향 및 롤 방향으로 동작하고, 상기 수평 암은 피치 방향으로 동작하고,상기 수술 동작부는 상기 다수의 로봇 암 중 적어도 하나에 의해 서지 방향 또는 롤 방향으로 더 제어될 수 있으며,상기 수술 동작부는 적어도 두 개의 최소 침습 수술 도구를 포함하고,상기 적어도 두 개의 최소 침습 수술 도구는 서로 평행하게 배치되며,상기 조작부는 다수의 구동 풀리를 포함하고,상기 다수의 구동 풀리 각각은 구동 롤러에 의해 구동되며,상기 조작부는 다수의 동작 풀리를 더 포함하고,상기 다수의 동작 풀리 각각은 상기 다수의 구동 풀리 중 적어도 하나에 의해 구동되며,상기 다수의 동작 풀리는 상기 제1 동작 샤프트, 상기 제2 동작 샤프트 또는 상기 엔드 이펙터를 제어하고,상기 적어도 하나의 최소 침습 수술 도구는 상기 주 샤프트 및 상기 제1 동작 샤프트를 연결하는 제1 요 동작부, 상기 제1 동작 샤프트 및 상기 제2 동작 샤프트를 연결하는 제2 요 동작부, 및 상기 제2 동작 샤프트 및 상기 엔드 이펙터를 연결하는 피치 동작부를 더 포함하며,상기 제1 요 동작부는 상기 다수의 동작 풀리 중 하나의 동작 풀리에 요 케이블에 의해 연결되어 있고,상기 피치 동작부, 상기 제1 요 동작부 및 상기 제2 요 동작부는 상기 다수의 동작 풀리 중 나머지 동작 풀리에 제1 피치 케이블 및 제2 피치 케이블에 의해 연결되어 있는 것을 특징으로 하는 수술용 로봇 시스템.
- 수술용 로봇 시스템으로서,다수의 로봇 암, 및수술 동작부를 포함하고,상기 수술 동작부는 상기 다수의 로봇 암 중 적어도 하나에 의해 피치 방향 또는 요 방향으로 제어될 수 있고,상기 수술 동작부는 적어도 하나의 최소 침습 수술 도구를 포함하며,상기 적어도 하나의 최소 침습 수술 도구는 주 샤프트, 제1 동작 샤프트, 제2 동작 샤프트, 엔드 이펙터 및 조작부를 포함하고,상기 조작부는 상기 제1 동작 샤프트, 상기 제2 동작 샤프트 및 상기 엔드 이펙터를 제어하며,베이스를 더 포함하고,상기 베이스는 수직 암 및 수평 암을 포함하며,상기 수직 암은 서지 방향 및 롤 방향으로 동작하고, 상기 수평 암은 피치 방향으로 동작하고,상기 수술 동작부는 상기 다수의 로봇 암 중 적어도 하나에 의해 서지 방향 또는 롤 방향으로 더 제어될 수 있으며,상기 수술 동작부는 적어도 두 개의 최소 침습 수술 도구를 포함하고,상기 적어도 두 개의 최소 침습 수술 도구는 서로 평행하게 배치되며,상기 조작부는 다수의 구동 풀리를 포함하고,상기 다수의 구동 풀리 각각은 구동 롤러에 의해 구동되며,상기 조작부는 다수의 동작 풀리를 더 포함하고,상기 다수의 동작 풀리 각각은 상기 다수의 구동 풀리 중 적어도 하나에 의해 구동되며,상기 다수의 동작 풀리는 상기 제1 동작 샤프트, 상기 제2 동작 샤프트 또는 상기 엔드 이펙터를 제어하고,상기 적어도 하나의 최소 침습 수술 도구는 상기 주 샤프트 및 상기 제1 동작 샤프트를 연결하는 제1 요 동작부, 상기 제1 동작 샤프트 및 상기 제2 동작 샤프트를 연결하는 제2 요 동작부, 및 상기 제2 동작 샤프트 및 상기 엔드 이펙터를 연결하는 피치 동작부를 더 포함하며,상기 제1 요 동작부는 상기 다수의 동작 풀리 중 제1 동작 풀리에 제1 요 케이블에 의해 연결되어 있고,상기 제2 요 동작부는 상기 다수의 동작 풀리 중 제2 동작 풀리에 제2 요 케이블에 의해 연결되어 있으며,상기 피치 동작부는 상기 다수의 동작 풀리 중 제3 동작 풀리에 피치 케이블에 의해 연결되어 있고,상기 엔드 이펙터는 상기 다수의 구동 풀리 중 제1 구동 풀리에 개폐 케이블에 의해 연결되어 있는 것을 특징으로 하는 수술용 로봇 시스템.
- 수술용 로봇 시스템으로서,다수의 로봇 암, 및수술 동작부를 포함하고,상기 수술 동작부는 상기 다수의 로봇 암 중 적어도 하나에 의해 피치 방향 또는 요 방향으로 제어될 수 있고,상기 수술 동작부는 적어도 하나의 최소 침습 수술 도구를 포함하며,상기 적어도 하나의 최소 침습 수술 도구는 주 샤프트, 제1 동작 샤프트, 제2 동작 샤프트, 엔드 이펙터 및 조작부를 포함하고,상기 조작부는 상기 제1 동작 샤프트, 상기 제2 동작 샤프트 및 상기 엔드 이펙터를 제어하며,베이스를 더 포함하고,상기 베이스는 수직 암 및 수평 암을 포함하며,상기 수직 암은 서지 방향 및 롤 방향으로 동작하고, 상기 수평 암은 피치 방향으로 동작하고,상기 수술 동작부는 상기 다수의 로봇 암 중 적어도 하나에 의해 서지 방향 또는 롤 방향으로 더 제어될 수 있으며,상기 수술 동작부는 적어도 두 개의 최소 침습 수술 도구를 포함하고,상기 적어도 두 개의 최소 침습 수술 도구는 서로 평행하게 배치되며,상기 조작부는 다수의 구동 풀리를 포함하고,상기 다수의 구동 풀리 각각은 구동 롤러에 의해 구동되며,상기 조작부는 다수의 동작 풀리를 더 포함하고,상기 다수의 동작 풀리 각각은 상기 다수의 구동 풀리 중 적어도 하나에 의해 구동되며,상기 다수의 동작 풀리는 상기 제1 동작 샤프트, 상기 제2 동작 샤프트 또는 상기 엔드 이펙터를 제어하고,상기 적어도 하나의 최소 침습 수술 도구는 상기 주 샤프트 및 상기 제1 동작 샤프트를 연결하는 제1 요 동작부, 상기 제1 동작 샤프트 및 상기 제2 동작 샤프트를 연결하는 제2 요 동작부, 및 상기 제2 동작 샤프트 및 상기 엔드 이펙터를 연결하는 연결부를 더 포함하며,상기 제1 요 동작부는 상기 다수의 동작 풀리 중 제1 동작 풀리에 제1 요 케이블에 의해 연결되어 있고,상기 제2 요 동작부는 상기 다수의 동작 풀리 중 제2 동작 풀리에 제2 요 케이블에 의해 연결되어 있으며,상기 연결부, 상기 제1 요 동작부 및 상기 제2 요 동작부는 상기 다수의 동작 풀리 중 나머지 동작 풀리에 제1 피치 케이블 및 제2 피치 케이블에 의해 연결되어 있는 것을 특징으로 하는 수술용 로봇 시스템.
- 수술용 로봇 시스템으로서,다수의 로봇 암, 및수술 동작부를 포함하고,상기 수술 동작부는 상기 다수의 로봇 암 중 적어도 하나에 의해 피치 방향 또는 요 방향으로 제어될 수 있고,상기 수술 동작부는 적어도 하나의 최소 침습 수술 도구를 포함하며,상기 적어도 하나의 최소 침습 수술 도구는 주 샤프트, 제1 동작 샤프트, 제2 동작 샤프트, 엔드 이펙터 및 조작부를 포함하고,상기 조작부는 상기 제1 동작 샤프트, 상기 제2 동작 샤프트 및 상기 엔드 이펙터를 제어하며,베이스를 더 포함하고,상기 베이스는 수직 암 및 수평 암을 포함하며,상기 수직 암은 서지 방향 및 롤 방향으로 동작하고, 상기 수평 암은 피치 방향으로 동작하고,상기 수술 동작부는 상기 다수의 로봇 암 중 적어도 하나에 의해 서지 방향 또는 롤 방향으로 더 제어될 수 있으며,상기 수술 동작부는 적어도 두 개의 최소 침습 수술 도구를 포함하고,상기 적어도 두 개의 최소 침습 수술 도구는 서로 평행하게 배치되며,상기 조작부는 다수의 구동 풀리를 포함하고,상기 다수의 구동 풀리 각각은 구동 롤러에 의해 구동되며,상기 조작부는 다수의 동작 풀리를 더 포함하고,상기 다수의 동작 풀리 각각은 상기 다수의 구동 풀리 중 적어도 하나에 의해 구동되며,상기 다수의 동작 풀리는 상기 제1 동작 샤프트, 상기 제2 동작 샤프트 또는 상기 엔드 이펙터를 제어하고,상기 적어도 하나의 최소 침습 수술 도구는 상기 주 샤프트 및 상기 제1 동작 샤프트를 연결하는 제1 요 동작부, 상기 제1 동작 샤프트 및 상기 제2 동작 샤프트를 연결하는 제2 요 동작부, 및 상기 제2 동작 샤프트 및 상기 엔드 이펙터를 연결하는 피치 동작부를 더 포함하며,상기 제1 요 동작부는 상기 다수의 동작 풀리 중 제1 동작 풀리에 제1 요 케이블에 의해 연결되어 있고,상기 제2 요 동작부는 상기 다수의 동작 풀리 중 제2 동작 풀리에 제2 요 케이블에 의해 연결되어 있으며,상기 피치 동작부는 상기 다수의 동작 풀리 중 제3 동작 풀리에 피치 케이블에 의해 연결되어 있는 것을 특징으로 하는 수술용 로봇 시스템.
- 제1항 내지 제4항 중 어느 한 항에 있어서,상기 수술 동작부는 내시경을 더 포함하는 것을 특징으로 하는 수술용 로봇 시스템.
- 제5항에 있어서,상기 내시경은 상기 적어도 하나의 최소 침습 수술 도구와 하나의 다발을 형성하는 것을 특징으로 하는 수술용 로봇 시스템.
- 제5항에 있어서,상기 내시경 및 상기 적어도 하나의 최소 침습 수술 도구는 각각 상기 수술 동작부에 대하여 서지 방향 또는 롤 방향으로 제어될 수 있는 것을 특징으로 하는 수술용 로봇 시스템.
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 제2항에 있어서,상기 적어도 하나의 최소 침습 수술 도구는 상기 제2 동작 샤프트 및 상기 엔드 이펙터를 연결하는 제3 요 동작부를 더 포함하고,상기 제3 요 동작부는 상기 다수의 동작 풀리 중 제4 동작 풀리에 제3 요 케이블에 의해 연결되어 있는 것을 특징으로 하는 수술용 로봇 시스템.
- 삭제
- 삭제
- 제1항에 있어서,주 제어부를 더 포함하고,상기 주 제어부는 적어도 하나의 조이스틱 및 적어도 하나의 조절 손잡이부를 포함하며,상기 적어도 하나의 조이스틱은 상기 수술 동작부를 제어하고, 상기 적어도 하나의 조절 손잡이부는 상기 적어도 하나의 최소 침습 수술 도구를 제어하는 것을 특징으로 하는 수술용 로봇 시스템.
- 제16항에 있어서,상기 적어도 하나의 조이스틱은 상기 수술 동작부에 배치되는 내시경을 더 제어하는 것을 특징으로 하는 수술용 로봇 시스템.
- 제16항에 있어서,상기 적어도 하나의 조이스틱 중 적어도 일부는 서지 방향, 피치 방향, 요 방향 및 롤 방향으로 조작될 수 있는 것을 특징으로 하는 수술용 로봇 시스템.
- 제16항에 있어서,상기 적어도 하나의 조절 손잡이부는 제1 조작 로드, 제2 조작 로드, 제3 조작 로드, 제1 로드 및 제2 로드를 포함하고,상기 제1 조작 로드, 상기 제2 조작 로드 및 상기 제3 조작 로드는 제1 요 회전축 및 제2 요 회전축에 의해 순차적으로 연결되며,상기 제3 조작 로드는 상기 제1 로드 및 상기 제2 로드에 피치 회전축에 의해 연결되고,상기 제1 조작 로드의 동작은 상기 주 샤프트에 대응되고, 상기 제2 조작 로드의 동작은 상기 제1 동작 샤프트에 대응되며, 상기 제3 조작 로드의 동작은 상기 제2 동작 샤프트에 대응되고, 상기 제1 로드 및 상기 제2 로드의 동작은 상기 엔드 이펙터에 대응되는 것을 특징으로 하는 수술용 로봇 시스템.
- 제19항에 있어서,상기 적어도 하나의 최소 침습 수술 도구는 상기 제2 동작 샤프트 및 상기 엔드 이펙터를 연결하는 제3 요 동작부 또는 연결부를 더 포함하고,상기 주 제어부는 페달을 더 포함하며,상기 페달의 조작에 따라 상기 여러 조작 로드와 상기 여러 샤프트 간의 동작 대응 관계가 변경될 수 있는 것을 특징으로 하는 수술용 로봇 시스템.
- 제16항에 있어서,상기 주 제어부는 페달을 더 포함하고,상기 페달의 조작에 따라 상기 적어도 하나의 조절 손잡이부의 상기 적어도 하나의 최소 침습 수술 도구에 대한 대응 관계가 변경될 수 있는 것을 특징으로 하는 수술용 로봇 시스템.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020080108103A KR101075363B1 (ko) | 2008-10-31 | 2008-10-31 | 최소 침습 수술 도구를 포함하는 수술용 로봇 시스템 |
| US13/127,009 US9089352B2 (en) | 2008-10-31 | 2009-10-30 | Surgical robot system having tool for minimally invasive surgery |
| PCT/KR2009/006333 WO2010050771A2 (en) | 2008-10-31 | 2009-10-30 | Surgical robot system having tool for minimally invasive surgery |
| EP09823851.2A EP2349015A4 (en) | 2008-10-31 | 2009-10-30 | SURGICAL ROBOT SYSTEM EQUIPPED WITH MINIMALLY INVASIVE TOOL FOR SURGERY |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020080108103A KR101075363B1 (ko) | 2008-10-31 | 2008-10-31 | 최소 침습 수술 도구를 포함하는 수술용 로봇 시스템 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20100048789A KR20100048789A (ko) | 2010-05-11 |
| KR101075363B1 true KR101075363B1 (ko) | 2011-10-19 |
Family
ID=42129482
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020080108103A KR101075363B1 (ko) | 2008-10-31 | 2008-10-31 | 최소 침습 수술 도구를 포함하는 수술용 로봇 시스템 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9089352B2 (ko) |
| EP (1) | EP2349015A4 (ko) |
| KR (1) | KR101075363B1 (ko) |
| WO (1) | WO2010050771A2 (ko) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102917662A (zh) * | 2010-05-25 | 2013-02-06 | 郑昶旭 | 能够实现单一通道手术模式和多通道手术模式的手术用机器人系统及其控制方法 |
| WO2014028699A1 (en) * | 2012-08-15 | 2014-02-20 | Intuitive Surgical Operations, Inc. | Movable surgical mounting platform controlled by manual motion of robotic arms |
| KR101372189B1 (ko) | 2012-04-27 | 2014-03-07 | 한양대학교 에리카산학협력단 | 수술도구의 위치변경이 가능한 수술로봇 |
| KR101458067B1 (ko) | 2006-06-05 | 2014-11-04 | 세녹스, 아이엔씨 | 통합 초음파 영상 시스템을 구비한 생검 시스템 |
| KR20210011625A (ko) * | 2019-07-23 | 2021-02-02 | (주)이롭 | 다관절 로봇 제어방법 및 시스템 |
| KR20220078021A (ko) | 2020-12-03 | 2022-06-10 | (주)이롭 | 복강경 수술을 보조하는 엔드이펙터 |
Families Citing this family (699)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| US11998198B2 (en) | 2004-07-28 | 2024-06-04 | Cilag Gmbh International | Surgical stapling instrument incorporating a two-piece E-beam firing mechanism |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| US8215531B2 (en) | 2004-07-28 | 2012-07-10 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a medical substance dispenser |
| US11896225B2 (en) | 2004-07-28 | 2024-02-13 | Cilag Gmbh International | Staple cartridge comprising a pan |
| US8317070B2 (en) | 2005-08-31 | 2012-11-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling devices that produce formed staples having different lengths |
| US11484312B2 (en) | 2005-08-31 | 2022-11-01 | Cilag Gmbh International | Staple cartridge comprising a staple driver arrangement |
| US7669746B2 (en) | 2005-08-31 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US7934630B2 (en) | 2005-08-31 | 2011-05-03 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US11246590B2 (en) | 2005-08-31 | 2022-02-15 | Cilag Gmbh International | Staple cartridge including staple drivers having different unfired heights |
| US10159482B2 (en) | 2005-08-31 | 2018-12-25 | Ethicon Llc | Fastener cartridge assembly comprising a fixed anvil and different staple heights |
| US9237891B2 (en) | 2005-08-31 | 2016-01-19 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical stapling devices that produce formed staples having different lengths |
| US20070106317A1 (en) | 2005-11-09 | 2007-05-10 | Shelton Frederick E Iv | Hydraulically and electrically actuated articulation joints for surgical instruments |
| US9861359B2 (en) | 2006-01-31 | 2018-01-09 | Ethicon Llc | Powered surgical instruments with firing system lockout arrangements |
| US20110024477A1 (en) | 2009-02-06 | 2011-02-03 | Hall Steven G | Driven Surgical Stapler Improvements |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US11793518B2 (en) | 2006-01-31 | 2023-10-24 | Cilag Gmbh International | Powered surgical instruments with firing system lockout arrangements |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US11224427B2 (en) | 2006-01-31 | 2022-01-18 | Cilag Gmbh International | Surgical stapling system including a console and retraction assembly |
| US20110006101A1 (en) | 2009-02-06 | 2011-01-13 | EthiconEndo-Surgery, Inc. | Motor driven surgical fastener device with cutting member lockout arrangements |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| US7753904B2 (en) | 2006-01-31 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Endoscopic surgical instrument with a handle that can articulate with respect to the shaft |
| US8820603B2 (en) | 2006-01-31 | 2014-09-02 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US20110295295A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument having recording capabilities |
| US11278279B2 (en) | 2006-01-31 | 2022-03-22 | Cilag Gmbh International | Surgical instrument assembly |
| US8219178B2 (en) | 2007-02-16 | 2012-07-10 | Catholic Healthcare West | Method and system for performing invasive medical procedures using a surgical robot |
| US10893912B2 (en) | 2006-02-16 | 2021-01-19 | Globus Medical Inc. | Surgical tool systems and methods |
| US10357184B2 (en) | 2012-06-21 | 2019-07-23 | Globus Medical, Inc. | Surgical tool systems and method |
| US10653497B2 (en) | 2006-02-16 | 2020-05-19 | Globus Medical, Inc. | Surgical tool systems and methods |
| US20110163146A1 (en) * | 2006-03-23 | 2011-07-07 | Ortiz Mark S | Surgical Stapling And Cuttting Device |
| US8721630B2 (en) | 2006-03-23 | 2014-05-13 | Ethicon Endo-Surgery, Inc. | Methods and devices for controlling articulation |
| US8992422B2 (en) | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| US20070225562A1 (en) | 2006-03-23 | 2007-09-27 | Ethicon Endo-Surgery, Inc. | Articulating endoscopic accessory channel |
| CA3068216C (en) | 2006-06-22 | 2023-03-07 | Board Of Regents Of The University Of Nebraska | Magnetically coupleable robotic devices and related methods |
| US8679096B2 (en) | 2007-06-21 | 2014-03-25 | Board Of Regents Of The University Of Nebraska | Multifunctional operational component for robotic devices |
| US9579088B2 (en) | 2007-02-20 | 2017-02-28 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices for surgical visualization and device manipulation |
| US8322455B2 (en) | 2006-06-27 | 2012-12-04 | Ethicon Endo-Surgery, Inc. | Manually driven surgical cutting and fastening instrument |
| US20080078802A1 (en) | 2006-09-29 | 2008-04-03 | Hess Christopher J | Surgical staples and stapling instruments |
| US10568652B2 (en) | 2006-09-29 | 2020-02-25 | Ethicon Llc | Surgical staples having attached drivers of different heights and stapling instruments for deploying the same |
| US10130359B2 (en) | 2006-09-29 | 2018-11-20 | Ethicon Llc | Method for forming a staple |
| US11980366B2 (en) | 2006-10-03 | 2024-05-14 | Cilag Gmbh International | Surgical instrument |
| US11291441B2 (en) | 2007-01-10 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with wireless communication between control unit and remote sensor |
| US8652120B2 (en) | 2007-01-10 | 2014-02-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US8840603B2 (en) | 2007-01-10 | 2014-09-23 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| US8540128B2 (en) | 2007-01-11 | 2013-09-24 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with a curved end effector |
| US11039836B2 (en) | 2007-01-11 | 2021-06-22 | Cilag Gmbh International | Staple cartridge for use with a surgical stapling instrument |
| US20090001130A1 (en) | 2007-03-15 | 2009-01-01 | Hess Christopher J | Surgical procedure using a cutting and stapling instrument having releasable staple-forming pockets |
| US8893946B2 (en) | 2007-03-28 | 2014-11-25 | Ethicon Endo-Surgery, Inc. | Laparoscopic tissue thickness and clamp load measuring devices |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US11672531B2 (en) | 2007-06-04 | 2023-06-13 | Cilag Gmbh International | Rotary drive systems for surgical instruments |
| US8408439B2 (en) | 2007-06-22 | 2013-04-02 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with an articulatable end effector |
| US7753245B2 (en) | 2007-06-22 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments |
| US11849941B2 (en) | 2007-06-29 | 2023-12-26 | Cilag Gmbh International | Staple cartridge having staple cavities extending at a transverse angle relative to a longitudinal cartridge axis |
| CA2690808C (en) | 2007-07-12 | 2016-09-27 | Board Of Regents Of The University Of Nebraska | Methods and systems of actuation in robotic devices |
| JP2010536435A (ja) | 2007-08-15 | 2010-12-02 | ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ | 医療用膨張、取り付けおよび送達装置、ならびに関連する方法 |
| US8561870B2 (en) | 2008-02-13 | 2013-10-22 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument |
| US7819298B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with control features operable with one hand |
| US8636736B2 (en) | 2008-02-14 | 2014-01-28 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument |
| US8657174B2 (en) | 2008-02-14 | 2014-02-25 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument having handle based power source |
| US7866527B2 (en) | 2008-02-14 | 2011-01-11 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with interlockable firing system |
| US9179912B2 (en) | 2008-02-14 | 2015-11-10 | Ethicon Endo-Surgery, Inc. | Robotically-controlled motorized surgical cutting and fastening instrument |
| US8573465B2 (en) | 2008-02-14 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical end effector system with rotary actuated closure systems |
| BRPI0901282A2 (pt) | 2008-02-14 | 2009-11-17 | Ethicon Endo Surgery Inc | instrumento cirúrgico de corte e fixação dotado de eletrodos de rf |
| US8758391B2 (en) | 2008-02-14 | 2014-06-24 | Ethicon Endo-Surgery, Inc. | Interchangeable tools for surgical instruments |
| US11986183B2 (en) | 2008-02-14 | 2024-05-21 | Cilag Gmbh International | Surgical cutting and fastening instrument comprising a plurality of sensors to measure an electrical parameter |
| US20090206131A1 (en) | 2008-02-15 | 2009-08-20 | Ethicon Endo-Surgery, Inc. | End effector coupling arrangements for a surgical cutting and stapling instrument |
| US10390823B2 (en) | 2008-02-15 | 2019-08-27 | Ethicon Llc | End effector comprising an adjunct |
| US11272927B2 (en) | 2008-02-15 | 2022-03-15 | Cilag Gmbh International | Layer arrangements for surgical staple cartridges |
| US7954686B2 (en) | 2008-09-19 | 2011-06-07 | Ethicon Endo-Surgery, Inc. | Surgical stapler with apparatus for adjusting staple height |
| PL3476312T3 (pl) | 2008-09-19 | 2024-03-11 | Ethicon Llc | Stapler chirurgiczny z urządzeniem do dopasowania wysokości zszywek |
| US11648005B2 (en) | 2008-09-23 | 2023-05-16 | Cilag Gmbh International | Robotically-controlled motorized surgical instrument with an end effector |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US9005230B2 (en) | 2008-09-23 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US8608045B2 (en) | 2008-10-10 | 2013-12-17 | Ethicon Endo-Sugery, Inc. | Powered surgical cutting and stapling apparatus with manually retractable firing system |
| US8517239B2 (en) | 2009-02-05 | 2013-08-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument comprising a magnetic element driver |
| CN102341048A (zh) | 2009-02-06 | 2012-02-01 | 伊西康内外科公司 | 动力手术缝合器的改进 |
| US8444036B2 (en) | 2009-02-06 | 2013-05-21 | Ethicon Endo-Surgery, Inc. | Motor driven surgical fastener device with mechanisms for adjusting a tissue gap within the end effector |
| ES2388029B1 (es) | 2009-05-22 | 2013-08-13 | Universitat Politècnica De Catalunya | Sistema robótico para cirugia laparoscópica. |
| US8851354B2 (en) | 2009-12-24 | 2014-10-07 | Ethicon Endo-Surgery, Inc. | Surgical cutting instrument that analyzes tissue thickness |
| US8220688B2 (en) | 2009-12-24 | 2012-07-17 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument with electric actuator directional control assembly |
| US8608046B2 (en) | 2010-01-07 | 2013-12-17 | Ethicon Endo-Surgery, Inc. | Test device for a surgical tool |
| US20140330288A1 (en) * | 2010-03-25 | 2014-11-06 | Precision Automation And Robotics India Ltd. | Articulating Arm for a Robotic Surgical Instrument System |
| KR101126288B1 (ko) * | 2010-07-02 | 2012-03-20 | 한국과학기술원 | 수술도구 종단부의 롤링 운동이 가능한 최소침습수술용 수술장치 |
| CA3024427A1 (en) | 2010-07-28 | 2012-02-02 | Medrobotics Corporation | Surgical positioning and support system |
| US8783543B2 (en) | 2010-07-30 | 2014-07-22 | Ethicon Endo-Surgery, Inc. | Tissue acquisition arrangements and methods for surgical stapling devices |
| IT1401438B1 (it) * | 2010-08-04 | 2013-07-26 | Surgica Robotica S P A | Utensile chirurgico robotizzato. |
| WO2012020386A1 (en) | 2010-08-11 | 2012-02-16 | Ecole Polytechnique Federale De Lausanne (Epfl) | Mechanical positioning system for surgical instruments |
| US8360296B2 (en) | 2010-09-09 | 2013-01-29 | Ethicon Endo-Surgery, Inc. | Surgical stapling head assembly with firing lockout for a surgical stapler |
| US9289212B2 (en) | 2010-09-17 | 2016-03-22 | Ethicon Endo-Surgery, Inc. | Surgical instruments and batteries for surgical instruments |
| US8632525B2 (en) | 2010-09-17 | 2014-01-21 | Ethicon Endo-Surgery, Inc. | Power control arrangements for surgical instruments and batteries |
| US8733613B2 (en) | 2010-09-29 | 2014-05-27 | Ethicon Endo-Surgery, Inc. | Staple cartridge |
| US9364233B2 (en) | 2010-09-30 | 2016-06-14 | Ethicon Endo-Surgery, Llc | Tissue thickness compensators for circular surgical staplers |
| US8657176B2 (en) | 2010-09-30 | 2014-02-25 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator for a surgical stapler |
| US10945731B2 (en) | 2010-09-30 | 2021-03-16 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| US9307989B2 (en) | 2012-03-28 | 2016-04-12 | Ethicon Endo-Surgery, Llc | Tissue stapler having a thickness compensator incorportating a hydrophobic agent |
| US9351730B2 (en) | 2011-04-29 | 2016-05-31 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising channels |
| US9414838B2 (en) | 2012-03-28 | 2016-08-16 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprised of a plurality of materials |
| US9055941B2 (en) | 2011-09-23 | 2015-06-16 | Ethicon Endo-Surgery, Inc. | Staple cartridge including collapsible deck |
| US9204880B2 (en) | 2012-03-28 | 2015-12-08 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator comprising capsules defining a low pressure environment |
| US9232941B2 (en) | 2010-09-30 | 2016-01-12 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator comprising a reservoir |
| US11298125B2 (en) | 2010-09-30 | 2022-04-12 | Cilag Gmbh International | Tissue stapler having a thickness compensator |
| US11812965B2 (en) | 2010-09-30 | 2023-11-14 | Cilag Gmbh International | Layer of material for a surgical end effector |
| US9320523B2 (en) | 2012-03-28 | 2016-04-26 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising tissue ingrowth features |
| US9788834B2 (en) | 2010-09-30 | 2017-10-17 | Ethicon Llc | Layer comprising deployable attachment members |
| EP2621356B1 (en) | 2010-09-30 | 2018-03-07 | Ethicon LLC | Fastener system comprising a retention matrix and an alignment matrix |
| US9629814B2 (en) | 2010-09-30 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator configured to redistribute compressive forces |
| US9220501B2 (en) | 2010-09-30 | 2015-12-29 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensators |
| US9314246B2 (en) | 2010-09-30 | 2016-04-19 | Ethicon Endo-Surgery, Llc | Tissue stapler having a thickness compensator incorporating an anti-inflammatory agent |
| US9332974B2 (en) | 2010-09-30 | 2016-05-10 | Ethicon Endo-Surgery, Llc | Layered tissue thickness compensator |
| US11925354B2 (en) | 2010-09-30 | 2024-03-12 | Cilag Gmbh International | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US9480476B2 (en) | 2010-09-30 | 2016-11-01 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising resilient members |
| US8695866B2 (en) | 2010-10-01 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a power control circuit |
| US10092359B2 (en) | 2010-10-11 | 2018-10-09 | Ecole Polytechnique Federale De Lausanne | Mechanical manipulator for surgical instruments |
| EP2629655B1 (en) | 2010-10-22 | 2018-12-19 | Medrobotics Corporation | Highly articulated robotic probes and methods of production and use of such probes |
| WO2012078309A2 (en) | 2010-11-11 | 2012-06-14 | Medrobotics Corporation | Introduction devices for highly articulated robotic probes and methods of production and use of such probes |
| KR102102708B1 (ko) | 2010-11-15 | 2020-04-21 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 수술 기구에서 기구 샤프트 감김과 단부 작동기 작동의 해제 |
| US8978955B2 (en) | 2011-03-14 | 2015-03-17 | Ethicon Endo-Surgery, Inc. | Anvil assemblies with collapsible frames for circular staplers |
| WO2012131660A1 (en) | 2011-04-01 | 2012-10-04 | Ecole Polytechnique Federale De Lausanne (Epfl) | Robotic system for spinal and other surgeries |
| AU2012250197B2 (en) | 2011-04-29 | 2017-08-10 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US11207064B2 (en) | 2011-05-27 | 2021-12-28 | Cilag Gmbh International | Automated end effector component reloading system for use with a robotic system |
| CN102197989B (zh) * | 2011-06-01 | 2013-06-05 | 广州宝胆医疗器械科技有限公司 | 智能电子膀胱镜系统 |
| CN102188230B (zh) * | 2011-06-01 | 2013-03-20 | 广州宝胆医疗器械科技有限公司 | 智能电子胆囊镜系统 |
| CN102217926B (zh) * | 2011-06-01 | 2013-03-20 | 广州宝胆医疗器械科技有限公司 | 经自然腔道的智能电子内窥镜系统 |
| CN102217927B (zh) * | 2011-06-01 | 2013-06-05 | 广州宝胆医疗器械科技有限公司 | 经人工通道的智能电子内窥镜系统 |
| AU2012262011A1 (en) * | 2011-06-02 | 2013-12-19 | Medrobotics Corporation | Robotic systems, robotic system user interfaces, human interface devices for controlling robotic systems and methods of controlling robotic systems |
| EP3714821A1 (en) | 2011-06-10 | 2020-09-30 | Board of Regents of the University of Nebraska | Surgical end effector |
| US9089353B2 (en) | 2011-07-11 | 2015-07-28 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems, and related methods |
| CN103717355B (zh) | 2011-07-27 | 2015-11-25 | 洛桑联邦理工学院 | 用于远程操纵的机械遥控操作装置 |
| CN102973317A (zh) * | 2011-09-05 | 2013-03-20 | 周宁新 | 微创手术机器人机械臂布置结构 |
| WO2013036909A1 (en) * | 2011-09-09 | 2013-03-14 | Children's National Medical Center | Enhanced control of flexible endoscopes through human-machine interface |
| BR112014005937A2 (pt) | 2011-09-13 | 2017-04-04 | Medrobotics Corp | sondas extremamente articuladas com disposição de conexões antitorção, métodos para sua formação e métodos de condução de procedimentos médicos |
| US9050084B2 (en) | 2011-09-23 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Staple cartridge including collapsible deck arrangement |
| KR20180125619A (ko) | 2011-09-26 | 2018-11-23 | 주식회사 림사이언스 | 지능적 수술 시스템 |
| US10582973B2 (en) | 2012-08-08 | 2020-03-10 | Virtual Incision Corporation | Robotic surgical devices, systems, and related methods |
| KR20140104502A (ko) | 2011-12-21 | 2014-08-28 | 메드로보틱스 코포레이션 | 링크를 구비한 고도의 관절 프로브용 안정화 장치, 그 제조 방법 및 그 사용 방법 |
| EP2806941B1 (en) | 2012-01-10 | 2021-10-27 | Board of Regents of the University of Nebraska | Systems and devices for surgical access and insertion |
| US9044230B2 (en) | 2012-02-13 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Surgical cutting and fastening instrument with apparatus for determining cartridge and firing motion status |
| US9078653B2 (en) | 2012-03-26 | 2015-07-14 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with lockout system for preventing actuation in the absence of an installed staple cartridge |
| US9198662B2 (en) | 2012-03-28 | 2015-12-01 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator having improved visibility |
| CN104321024B (zh) | 2012-03-28 | 2017-05-24 | 伊西康内外科公司 | 包括多个层的组织厚度补偿件 |
| BR112014024098B1 (pt) | 2012-03-28 | 2021-05-25 | Ethicon Endo-Surgery, Inc. | cartucho de grampos |
| MX353040B (es) | 2012-03-28 | 2017-12-18 | Ethicon Endo Surgery Inc | Unidad retenedora que incluye un compensador de grosor de tejido. |
| KR101691277B1 (ko) * | 2012-04-27 | 2016-12-29 | 쿠카 레보라토리즈 게엠베하 | 외과용 로봇 시스템 |
| JP2015531608A (ja) | 2012-05-01 | 2015-11-05 | ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ | 単孔式ロボット機器および関連システムと方法 |
| US20130293362A1 (en) * | 2012-05-03 | 2013-11-07 | The Methodist Hospital Research Institute | Multi-degrees-of-freedom hand controller |
| KR101341468B1 (ko) * | 2012-05-18 | 2013-12-13 | 부산대학교 산학협력단 | 수술 로봇 시스템용 마스터 로봇 |
| EP2854686B1 (en) * | 2012-06-01 | 2021-08-25 | Intuitive Surgical Operations, Inc. | Surgical instrument manipulator aspects |
| US9101358B2 (en) | 2012-06-15 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising a firing drive |
| US10136954B2 (en) | 2012-06-21 | 2018-11-27 | Globus Medical, Inc. | Surgical tool systems and method |
| US11607149B2 (en) | 2012-06-21 | 2023-03-21 | Globus Medical Inc. | Surgical tool systems and method |
| US11298196B2 (en) | 2012-06-21 | 2022-04-12 | Globus Medical Inc. | Surgical robotic automation with tracking markers and controlled tool advancement |
| US11974822B2 (en) | 2012-06-21 | 2024-05-07 | Globus Medical Inc. | Method for a surveillance marker in robotic-assisted surgery |
| US12004905B2 (en) | 2012-06-21 | 2024-06-11 | Globus Medical, Inc. | Medical imaging systems using robotic actuators and related methods |
| JP2015528713A (ja) | 2012-06-21 | 2015-10-01 | グローバス メディカル インコーポレイティッド | 手術ロボットプラットフォーム |
| US11864745B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical, Inc. | Surgical robotic system with retractor |
| US10350013B2 (en) | 2012-06-21 | 2019-07-16 | Globus Medical, Inc. | Surgical tool systems and methods |
| US11116576B2 (en) | 2012-06-21 | 2021-09-14 | Globus Medical Inc. | Dynamic reference arrays and methods of use |
| US10231791B2 (en) | 2012-06-21 | 2019-03-19 | Globus Medical, Inc. | Infrared signal based position recognition system for use with a robot-assisted surgery |
| US11864839B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical Inc. | Methods of adjusting a virtual implant and related surgical navigation systems |
| US11857149B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | Surgical robotic systems with target trajectory deviation monitoring and related methods |
| US11399900B2 (en) | 2012-06-21 | 2022-08-02 | Globus Medical, Inc. | Robotic systems providing co-registration using natural fiducials and related methods |
| US10758315B2 (en) | 2012-06-21 | 2020-09-01 | Globus Medical Inc. | Method and system for improving 2D-3D registration convergence |
| US11793570B2 (en) | 2012-06-21 | 2023-10-24 | Globus Medical Inc. | Surgical robotic automation with tracking markers |
| US11045267B2 (en) | 2012-06-21 | 2021-06-29 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US11857266B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | System for a surveillance marker in robotic-assisted surgery |
| US11395706B2 (en) | 2012-06-21 | 2022-07-26 | Globus Medical Inc. | Surgical robot platform |
| US10624710B2 (en) | 2012-06-21 | 2020-04-21 | Globus Medical, Inc. | System and method for measuring depth of instrumentation |
| US11317971B2 (en) | 2012-06-21 | 2022-05-03 | Globus Medical, Inc. | Systems and methods related to robotic guidance in surgery |
| US11253327B2 (en) | 2012-06-21 | 2022-02-22 | Globus Medical, Inc. | Systems and methods for automatically changing an end-effector on a surgical robot |
| EP4234185A3 (en) | 2012-06-22 | 2023-09-20 | Board of Regents of the University of Nebraska | Local control robotic surgical devices |
| US9125662B2 (en) | 2012-06-28 | 2015-09-08 | Ethicon Endo-Surgery, Inc. | Multi-axis articulating and rotating surgical tools |
| US9289256B2 (en) | 2012-06-28 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical end effectors having angled tissue-contacting surfaces |
| US9282974B2 (en) | 2012-06-28 | 2016-03-15 | Ethicon Endo-Surgery, Llc | Empty clip cartridge lockout |
| US9028494B2 (en) | 2012-06-28 | 2015-05-12 | Ethicon Endo-Surgery, Inc. | Interchangeable end effector coupling arrangement |
| BR112014032776B1 (pt) | 2012-06-28 | 2021-09-08 | Ethicon Endo-Surgery, Inc | Sistema de instrumento cirúrgico e kit cirúrgico para uso com um sistema de instrumento cirúrgico |
| US9072536B2 (en) | 2012-06-28 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Differential locking arrangements for rotary powered surgical instruments |
| US9204879B2 (en) | 2012-06-28 | 2015-12-08 | Ethicon Endo-Surgery, Inc. | Flexible drive member |
| US20140005678A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Rotary drive arrangements for surgical instruments |
| US11202631B2 (en) | 2012-06-28 | 2021-12-21 | Cilag Gmbh International | Stapling assembly comprising a firing lockout |
| US20140001231A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Firing system lockout arrangements for surgical instruments |
| US9101385B2 (en) | 2012-06-28 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Electrode connections for rotary driven surgical tools |
| EP2866686A1 (en) | 2012-06-28 | 2015-05-06 | Ethicon Endo-Surgery, Inc. | Empty clip cartridge lockout |
| US9119657B2 (en) | 2012-06-28 | 2015-09-01 | Ethicon Endo-Surgery, Inc. | Rotary actuatable closure arrangement for surgical end effector |
| US9561038B2 (en) | 2012-06-28 | 2017-02-07 | Ethicon Endo-Surgery, Llc | Interchangeable clip applier |
| US9770305B2 (en) | 2012-08-08 | 2017-09-26 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems, and related methods |
| US9675380B2 (en) | 2012-08-09 | 2017-06-13 | Medrobotics Corporation | Surgical tool positioning system |
| US9386985B2 (en) | 2012-10-15 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Surgical cutting instrument |
| KR20140090374A (ko) * | 2013-01-08 | 2014-07-17 | 삼성전자주식회사 | 싱글 포트 수술 로봇 및 그 제어 방법 |
| US9386984B2 (en) | 2013-02-08 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Staple cartridge comprising a releasable cover |
| EP2956080B1 (en) | 2013-02-15 | 2020-08-05 | Intuitive Surgical Operations, Inc. | Systems for proximal control of a surgical instrument |
| EP2956202B1 (en) * | 2013-02-17 | 2018-07-25 | Human Extensions Ltd. | Steerable medical device |
| BR112015021098B1 (pt) | 2013-03-01 | 2022-02-15 | Ethicon Endo-Surgery, Inc | Cobertura para uma junta de articulação e instrumento cirúrgico |
| US9468438B2 (en) | 2013-03-01 | 2016-10-18 | Eticon Endo-Surgery, LLC | Sensor straightened end effector during removal through trocar |
| MX364729B (es) | 2013-03-01 | 2019-05-06 | Ethicon Endo Surgery Inc | Instrumento quirúrgico con una parada suave. |
| US9345481B2 (en) | 2013-03-13 | 2016-05-24 | Ethicon Endo-Surgery, Llc | Staple cartridge tissue thickness sensor system |
| US9351726B2 (en) | 2013-03-14 | 2016-05-31 | Ethicon Endo-Surgery, Llc | Articulation control system for articulatable surgical instruments |
| WO2014160086A2 (en) | 2013-03-14 | 2014-10-02 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to robotic surgical devices, end effectors, and controllers |
| US9629629B2 (en) | 2013-03-14 | 2017-04-25 | Ethicon Endo-Surgey, LLC | Control systems for surgical instruments |
| WO2014152418A1 (en) | 2013-03-14 | 2014-09-25 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to force control surgical systems |
| EP3970604A1 (en) | 2013-03-15 | 2022-03-23 | Board of Regents of the University of Nebraska | Robotic surgical devices and systems |
| US9332984B2 (en) | 2013-03-27 | 2016-05-10 | Ethicon Endo-Surgery, Llc | Fastener cartridge assemblies |
| US9795384B2 (en) | 2013-03-27 | 2017-10-24 | Ethicon Llc | Fastener cartridge comprising a tissue thickness compensator and a gap setting element |
| US9572577B2 (en) | 2013-03-27 | 2017-02-21 | Ethicon Endo-Surgery, Llc | Fastener cartridge comprising a tissue thickness compensator including openings therein |
| US9814460B2 (en) | 2013-04-16 | 2017-11-14 | Ethicon Llc | Modular motor driven surgical instruments with status indication arrangements |
| BR112015026109B1 (pt) | 2013-04-16 | 2022-02-22 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| US9574644B2 (en) | 2013-05-30 | 2017-02-21 | Ethicon Endo-Surgery, Llc | Power module for use with a surgical instrument |
| JP6479790B2 (ja) | 2013-07-17 | 2019-03-06 | ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ | ロボット外科的デバイス、システムおよび関連する方法 |
| KR101454322B1 (ko) * | 2013-07-24 | 2014-11-03 | 부산대학교 산학협력단 | 수술 로봇 시스템용 마스터 로봇 |
| JP6416260B2 (ja) | 2013-08-23 | 2018-10-31 | エシコン エルエルシー | 動力付き外科用器具のための発射部材後退装置 |
| US9283054B2 (en) | 2013-08-23 | 2016-03-15 | Ethicon Endo-Surgery, Llc | Interactive displays |
| US9283048B2 (en) | 2013-10-04 | 2016-03-15 | KB Medical SA | Apparatus and systems for precise guidance of surgical tools |
| KR102111621B1 (ko) | 2013-11-05 | 2020-05-18 | 삼성전자주식회사 | 매니퓰레이터 |
| US9839428B2 (en) | 2013-12-23 | 2017-12-12 | Ethicon Llc | Surgical cutting and stapling instruments with independent jaw control features |
| US9681870B2 (en) | 2013-12-23 | 2017-06-20 | Ethicon Llc | Articulatable surgical instruments with separate and distinct closing and firing systems |
| US9724092B2 (en) | 2013-12-23 | 2017-08-08 | Ethicon Llc | Modular surgical instruments |
| US9549735B2 (en) | 2013-12-23 | 2017-01-24 | Ethicon Endo-Surgery, Llc | Fastener cartridge comprising a firing member including fastener transfer surfaces |
| US20150173756A1 (en) | 2013-12-23 | 2015-06-25 | Ethicon Endo-Surgery, Inc. | Surgical cutting and stapling methods |
| US9642620B2 (en) | 2013-12-23 | 2017-05-09 | Ethicon Endo-Surgery, Llc | Surgical cutting and stapling instruments with articulatable end effectors |
| EP3094272B1 (en) | 2014-01-15 | 2021-04-21 | KB Medical SA | Notched apparatus for guidance of an insertable instrument along an axis during spinal surgery |
| EP3102139B1 (en) | 2014-02-03 | 2018-06-13 | DistalMotion SA | Mechanical teleoperated device comprising an interchangeable distal instrument |
| EP3104803B1 (en) | 2014-02-11 | 2021-09-15 | KB Medical SA | Sterile handle for controlling a robotic surgical system from a sterile field |
| US9962161B2 (en) | 2014-02-12 | 2018-05-08 | Ethicon Llc | Deliverable surgical instrument |
| BR112016019387B1 (pt) | 2014-02-24 | 2022-11-29 | Ethicon Endo-Surgery, Llc | Sistema de instrumento cirúrgico e cartucho de prendedores para uso com um instrumento cirúrgico de fixação |
| US9884456B2 (en) | 2014-02-24 | 2018-02-06 | Ethicon Llc | Implantable layers and methods for altering one or more properties of implantable layers for use with fastening instruments |
| DE102014004238B4 (de) * | 2014-03-25 | 2018-12-13 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Robotersystem |
| US9826977B2 (en) | 2014-03-26 | 2017-11-28 | Ethicon Llc | Sterilization verification circuit |
| US9820738B2 (en) | 2014-03-26 | 2017-11-21 | Ethicon Llc | Surgical instrument comprising interactive systems |
| BR112016021943B1 (pt) | 2014-03-26 | 2022-06-14 | Ethicon Endo-Surgery, Llc | Instrumento cirúrgico para uso por um operador em um procedimento cirúrgico |
| US9913642B2 (en) | 2014-03-26 | 2018-03-13 | Ethicon Llc | Surgical instrument comprising a sensor system |
| US9750499B2 (en) | 2014-03-26 | 2017-09-05 | Ethicon Llc | Surgical stapling instrument system |
| BR112016023825B1 (pt) | 2014-04-16 | 2022-08-02 | Ethicon Endo-Surgery, Llc | Cartucho de grampos para uso com um grampeador cirúrgico e cartucho de grampos para uso com um instrumento cirúrgico |
| BR112016023698B1 (pt) | 2014-04-16 | 2022-07-26 | Ethicon Endo-Surgery, Llc | Cartucho de prendedores para uso com um instrumento cirúrgico |
| US20150297225A1 (en) | 2014-04-16 | 2015-10-22 | Ethicon Endo-Surgery, Inc. | Fastener cartridges including extensions having different configurations |
| US10426476B2 (en) | 2014-09-26 | 2019-10-01 | Ethicon Llc | Circular fastener cartridges for applying radially expandable fastener lines |
| US10010324B2 (en) | 2014-04-16 | 2018-07-03 | Ethicon Llc | Fastener cartridge compromising fastener cavities including fastener control features |
| JP6532889B2 (ja) | 2014-04-16 | 2019-06-19 | エシコン エルエルシーEthicon LLC | 締結具カートリッジ組立体及びステープル保持具カバー配置構成 |
| CN109907828B (zh) | 2014-04-22 | 2022-04-08 | 香港生物医学工程有限公司 | 外科设备 |
| US9895200B2 (en) | 2014-04-22 | 2018-02-20 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| US9855108B2 (en) * | 2014-04-22 | 2018-01-02 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| US11801099B2 (en) | 2014-04-22 | 2023-10-31 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| US9724168B2 (en) | 2014-04-22 | 2017-08-08 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| CN106659537B (zh) | 2014-04-24 | 2019-06-11 | Kb医疗公司 | 结合机器人手术系统使用的手术器械固持器 |
| WO2015171614A1 (en) | 2014-05-05 | 2015-11-12 | Vicarious Surgical Inc. | Virtual reality surgical device |
| US10045781B2 (en) | 2014-06-13 | 2018-08-14 | Ethicon Llc | Closure lockout systems for surgical instruments |
| EP3169252A1 (en) | 2014-07-14 | 2017-05-24 | KB Medical SA | Anti-skid surgical instrument for use in preparing holes in bone tissue |
| EP3185808B1 (en) | 2014-08-27 | 2022-02-23 | DistalMotion SA | Surgical system for microsurgical techniques |
| US11311294B2 (en) | 2014-09-05 | 2022-04-26 | Cilag Gmbh International | Powered medical device including measurement of closure state of jaws |
| BR112017004361B1 (pt) | 2014-09-05 | 2023-04-11 | Ethicon Llc | Sistema eletrônico para um instrumento cirúrgico |
| US20160066913A1 (en) | 2014-09-05 | 2016-03-10 | Ethicon Endo-Surgery, Inc. | Local display of tissue parameter stabilization |
| US10342561B2 (en) | 2014-09-12 | 2019-07-09 | Board Of Regents Of The University Of Nebraska | Quick-release end effectors and related systems and methods |
| US10105142B2 (en) | 2014-09-18 | 2018-10-23 | Ethicon Llc | Surgical stapler with plurality of cutting elements |
| US9815206B2 (en) * | 2014-09-25 | 2017-11-14 | The Johns Hopkins University | Surgical system user interface using cooperatively-controlled robot |
| CN107427300B (zh) | 2014-09-26 | 2020-12-04 | 伊西康有限责任公司 | 外科缝合支撑物和辅助材料 |
| US11523821B2 (en) | 2014-09-26 | 2022-12-13 | Cilag Gmbh International | Method for creating a flexible staple line |
| US10076325B2 (en) | 2014-10-13 | 2018-09-18 | Ethicon Llc | Surgical stapling apparatus comprising a tissue stop |
| US9924944B2 (en) | 2014-10-16 | 2018-03-27 | Ethicon Llc | Staple cartridge comprising an adjunct material |
| US11141153B2 (en) | 2014-10-29 | 2021-10-12 | Cilag Gmbh International | Staple cartridges comprising driver arrangements |
| US10517594B2 (en) | 2014-10-29 | 2019-12-31 | Ethicon Llc | Cartridge assemblies for surgical staplers |
| US9844376B2 (en) | 2014-11-06 | 2017-12-19 | Ethicon Llc | Staple cartridge comprising a releasable adjunct material |
| EP3217890B1 (en) | 2014-11-11 | 2020-04-08 | Board of Regents of the University of Nebraska | Robotic device with compact joint design |
| US10736636B2 (en) | 2014-12-10 | 2020-08-11 | Ethicon Llc | Articulatable surgical instrument system |
| USD768219S1 (en) * | 2014-12-17 | 2016-10-04 | Aktormed Gmbh | Robot system for medical surgeries |
| US9844375B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Drive arrangements for articulatable surgical instruments |
| US10085748B2 (en) | 2014-12-18 | 2018-10-02 | Ethicon Llc | Locking arrangements for detachable shaft assemblies with articulatable surgical end effectors |
| US9844374B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Surgical instrument systems comprising an articulatable end effector and means for adjusting the firing stroke of a firing member |
| US9987000B2 (en) | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| US10188385B2 (en) | 2014-12-18 | 2019-01-29 | Ethicon Llc | Surgical instrument system comprising lockable systems |
| BR112017012996B1 (pt) | 2014-12-18 | 2022-11-08 | Ethicon Llc | Instrumento cirúrgico com uma bigorna que é seletivamente móvel sobre um eixo geométrico imóvel distinto em relação a um cartucho de grampos |
| US10117649B2 (en) | 2014-12-18 | 2018-11-06 | Ethicon Llc | Surgical instrument assembly comprising a lockable articulation system |
| US10245027B2 (en) | 2014-12-18 | 2019-04-02 | Ethicon Llc | Surgical instrument with an anvil that is selectively movable about a discrete non-movable axis relative to a staple cartridge |
| US11039820B2 (en) | 2014-12-19 | 2021-06-22 | Distalmotion Sa | Sterile interface for articulated surgical instruments |
| EP3232977B1 (en) | 2014-12-19 | 2020-01-29 | DistalMotion SA | Docking system for mechanical telemanipulator |
| EP4342412A3 (en) | 2014-12-19 | 2024-06-05 | DistalMotion SA | Reusable surgical instrument for minimally invasive procedures |
| US10548680B2 (en) | 2014-12-19 | 2020-02-04 | Distalmotion Sa | Articulated handle for mechanical telemanipulator |
| EP3232951B1 (en) | 2014-12-19 | 2023-10-25 | DistalMotion SA | Surgical instrument with articulated end-effector |
| US10013808B2 (en) | 2015-02-03 | 2018-07-03 | Globus Medical, Inc. | Surgeon head-mounted display apparatuses |
| CN104622524A (zh) * | 2015-02-12 | 2015-05-20 | 苏州华奥医药科技有限公司 | 一种自动化内窥镜手术操作系统 |
| EP3258872B1 (en) | 2015-02-18 | 2023-04-26 | KB Medical SA | Systems for performing minimally invasive spinal surgery with a robotic surgical system using a percutaneous technique |
| US11154301B2 (en) | 2015-02-27 | 2021-10-26 | Cilag Gmbh International | Modular stapling assembly |
| US10180463B2 (en) | 2015-02-27 | 2019-01-15 | Ethicon Llc | Surgical apparatus configured to assess whether a performance parameter of the surgical apparatus is within an acceptable performance band |
| US10321907B2 (en) | 2015-02-27 | 2019-06-18 | Ethicon Llc | System for monitoring whether a surgical instrument needs to be serviced |
| US9993258B2 (en) | 2015-02-27 | 2018-06-12 | Ethicon Llc | Adaptable surgical instrument handle |
| JP2020121162A (ja) | 2015-03-06 | 2020-08-13 | エシコン エルエルシーEthicon LLC | 測定の安定性要素、クリープ要素、及び粘弾性要素を決定するためのセンサデータの時間依存性評価 |
| US9895148B2 (en) | 2015-03-06 | 2018-02-20 | Ethicon Endo-Surgery, Llc | Monitoring speed control and precision incrementing of motor for powered surgical instruments |
| US9993248B2 (en) | 2015-03-06 | 2018-06-12 | Ethicon Endo-Surgery, Llc | Smart sensors with local signal processing |
| US9924961B2 (en) | 2015-03-06 | 2018-03-27 | Ethicon Endo-Surgery, Llc | Interactive feedback system for powered surgical instruments |
| US10687806B2 (en) | 2015-03-06 | 2020-06-23 | Ethicon Llc | Adaptive tissue compression techniques to adjust closure rates for multiple tissue types |
| US9808246B2 (en) | 2015-03-06 | 2017-11-07 | Ethicon Endo-Surgery, Llc | Method of operating a powered surgical instrument |
| US10548504B2 (en) | 2015-03-06 | 2020-02-04 | Ethicon Llc | Overlaid multi sensor radio frequency (RF) electrode system to measure tissue compression |
| US9901342B2 (en) | 2015-03-06 | 2018-02-27 | Ethicon Endo-Surgery, Llc | Signal and power communication system positioned on a rotatable shaft |
| US10441279B2 (en) | 2015-03-06 | 2019-10-15 | Ethicon Llc | Multiple level thresholds to modify operation of powered surgical instruments |
| US10245033B2 (en) | 2015-03-06 | 2019-04-02 | Ethicon Llc | Surgical instrument comprising a lockable battery housing |
| US10045776B2 (en) | 2015-03-06 | 2018-08-14 | Ethicon Llc | Control techniques and sub-processor contained within modular shaft with select control processing from handle |
| US10617412B2 (en) | 2015-03-06 | 2020-04-14 | Ethicon Llc | System for detecting the mis-insertion of a staple cartridge into a surgical stapler |
| US10213201B2 (en) | 2015-03-31 | 2019-02-26 | Ethicon Llc | Stapling end effector configured to compensate for an uneven gap between a first jaw and a second jaw |
| US10363055B2 (en) | 2015-04-09 | 2019-07-30 | Distalmotion Sa | Articulated hand-held instrument |
| WO2016162752A1 (en) | 2015-04-09 | 2016-10-13 | Distalmotion Sa | Mechanical teleoperated device for remote manipulation |
| KR102371052B1 (ko) * | 2015-05-04 | 2022-03-10 | 큐렉소 주식회사 | 수술로봇 |
| WO2016183054A1 (en) | 2015-05-11 | 2016-11-17 | Covidien Lp | Coupling instrument drive unit and robotic surgical instrument |
| US10182818B2 (en) | 2015-06-18 | 2019-01-22 | Ethicon Llc | Surgical end effectors with positive jaw opening arrangements |
| JP6771494B2 (ja) | 2015-06-19 | 2020-10-21 | コヴィディエン リミテッド パートナーシップ | 双方向連結部を備えたロボット外科用機器の制御法 |
| US10058394B2 (en) | 2015-07-31 | 2018-08-28 | Globus Medical, Inc. | Robot arm and methods of use |
| US10646298B2 (en) | 2015-07-31 | 2020-05-12 | Globus Medical, Inc. | Robot arm and methods of use |
| US10806538B2 (en) | 2015-08-03 | 2020-10-20 | Virtual Incision Corporation | Robotic surgical devices, systems, and related methods |
| US10080615B2 (en) | 2015-08-12 | 2018-09-25 | Globus Medical, Inc. | Devices and methods for temporary mounting of parts to bone |
| US10617418B2 (en) | 2015-08-17 | 2020-04-14 | Ethicon Llc | Implantable layers for a surgical instrument |
| BR112018003693B1 (pt) | 2015-08-26 | 2022-11-22 | Ethicon Llc | Cartucho de grampos cirúrgicos para uso com um instrumento de grampeamento cirúrgico |
| MX2022009705A (es) | 2015-08-26 | 2022-11-07 | Ethicon Llc | Metodo para formar una grapa contra un yunque de un instrumento de engrapado quirurgico. |
| US10517599B2 (en) | 2015-08-26 | 2019-12-31 | Ethicon Llc | Staple cartridge assembly comprising staple cavities for providing better staple guidance |
| WO2017037532A1 (en) | 2015-08-28 | 2017-03-09 | Distalmotion Sa | Surgical instrument with increased actuation force |
| WO2017037127A1 (en) | 2015-08-31 | 2017-03-09 | KB Medical SA | Robotic surgical systems and methods |
| US10314587B2 (en) | 2015-09-02 | 2019-06-11 | Ethicon Llc | Surgical staple cartridge with improved staple driver configurations |
| MX2022006189A (es) | 2015-09-02 | 2022-06-16 | Ethicon Llc | Configuraciones de grapas quirurgicas con superficies de leva situadas entre porciones que soportan grapas quirurgicas. |
| US10034716B2 (en) | 2015-09-14 | 2018-07-31 | Globus Medical, Inc. | Surgical robotic systems and methods thereof |
| US10076326B2 (en) | 2015-09-23 | 2018-09-18 | Ethicon Llc | Surgical stapler having current mirror-based motor control |
| US10238386B2 (en) | 2015-09-23 | 2019-03-26 | Ethicon Llc | Surgical stapler having motor control based on an electrical parameter related to a motor current |
| US10327769B2 (en) | 2015-09-23 | 2019-06-25 | Ethicon Llc | Surgical stapler having motor control based on a drive system component |
| US10105139B2 (en) | 2015-09-23 | 2018-10-23 | Ethicon Llc | Surgical stapler having downstream current-based motor control |
| US10363036B2 (en) | 2015-09-23 | 2019-07-30 | Ethicon Llc | Surgical stapler having force-based motor control |
| US10085751B2 (en) | 2015-09-23 | 2018-10-02 | Ethicon Llc | Surgical stapler having temperature-based motor control |
| US10299878B2 (en) | 2015-09-25 | 2019-05-28 | Ethicon Llc | Implantable adjunct systems for determining adjunct skew |
| US11890015B2 (en) | 2015-09-30 | 2024-02-06 | Cilag Gmbh International | Compressible adjunct with crossing spacer fibers |
| US10271849B2 (en) | 2015-09-30 | 2019-04-30 | Ethicon Llc | Woven constructs with interlocked standing fibers |
| US10980539B2 (en) | 2015-09-30 | 2021-04-20 | Ethicon Llc | Implantable adjunct comprising bonded layers |
| US10307160B2 (en) | 2015-09-30 | 2019-06-04 | Ethicon Llc | Compressible adjunct assemblies with attachment layers |
| US9771092B2 (en) | 2015-10-13 | 2017-09-26 | Globus Medical, Inc. | Stabilizer wheel assembly and methods of use |
| ITUB20154977A1 (it) | 2015-10-16 | 2017-04-16 | Medical Microinstruments S R L | Strumento medicale e metodo di fabbricazione di detto strumento medicale |
| US10368865B2 (en) | 2015-12-30 | 2019-08-06 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10292704B2 (en) | 2015-12-30 | 2019-05-21 | Ethicon Llc | Mechanisms for compensating for battery pack failure in powered surgical instruments |
| US10265068B2 (en) | 2015-12-30 | 2019-04-23 | Ethicon Llc | Surgical instruments with separable motors and motor control circuits |
| WO2017132265A1 (en) | 2016-01-29 | 2017-08-03 | Boston Scientific Scimed, Inc. | Endoscopy systems and related methods |
| US10842453B2 (en) | 2016-02-03 | 2020-11-24 | Globus Medical, Inc. | Portable medical imaging system |
| US10448910B2 (en) | 2016-02-03 | 2019-10-22 | Globus Medical, Inc. | Portable medical imaging system |
| US11883217B2 (en) | 2016-02-03 | 2024-01-30 | Globus Medical, Inc. | Portable medical imaging system and method |
| US11058378B2 (en) | 2016-02-03 | 2021-07-13 | Globus Medical, Inc. | Portable medical imaging system |
| US10117632B2 (en) | 2016-02-03 | 2018-11-06 | Globus Medical, Inc. | Portable medical imaging system with beam scanning collimator |
| US11213293B2 (en) | 2016-02-09 | 2022-01-04 | Cilag Gmbh International | Articulatable surgical instruments with single articulation link arrangements |
| US10245030B2 (en) | 2016-02-09 | 2019-04-02 | Ethicon Llc | Surgical instruments with tensioning arrangements for cable driven articulation systems |
| JP6911054B2 (ja) | 2016-02-09 | 2021-07-28 | エシコン エルエルシーEthicon LLC | 非対称の関節構成を備えた外科用器具 |
| US11224426B2 (en) | 2016-02-12 | 2022-01-18 | Cilag Gmbh International | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10258331B2 (en) | 2016-02-12 | 2019-04-16 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10448948B2 (en) | 2016-02-12 | 2019-10-22 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10866119B2 (en) | 2016-03-14 | 2020-12-15 | Globus Medical, Inc. | Metal detector for detecting insertion of a surgical device into a hollow tube |
| US10285705B2 (en) | 2016-04-01 | 2019-05-14 | Ethicon Llc | Surgical stapling system comprising a grooved forming pocket |
| US10617413B2 (en) | 2016-04-01 | 2020-04-14 | Ethicon Llc | Closure system arrangements for surgical cutting and stapling devices with separate and distinct firing shafts |
| US10531874B2 (en) | 2016-04-01 | 2020-01-14 | Ethicon Llc | Surgical cutting and stapling end effector with anvil concentric drive member |
| US11284890B2 (en) | 2016-04-01 | 2022-03-29 | Cilag Gmbh International | Circular stapling system comprising an incisable tissue support |
| US10433849B2 (en) | 2016-04-01 | 2019-10-08 | Ethicon Llc | Surgical stapling system comprising a display including a re-orientable display field |
| EP3241518B1 (en) | 2016-04-11 | 2024-10-23 | Globus Medical, Inc | Surgical tool systems |
| US10357247B2 (en) | 2016-04-15 | 2019-07-23 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10405859B2 (en) | 2016-04-15 | 2019-09-10 | Ethicon Llc | Surgical instrument with adjustable stop/start control during a firing motion |
| US11179150B2 (en) | 2016-04-15 | 2021-11-23 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10335145B2 (en) | 2016-04-15 | 2019-07-02 | Ethicon Llc | Modular surgical instrument with configurable operating mode |
| US10456137B2 (en) | 2016-04-15 | 2019-10-29 | Ethicon Llc | Staple formation detection mechanisms |
| US11607239B2 (en) | 2016-04-15 | 2023-03-21 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10426467B2 (en) | 2016-04-15 | 2019-10-01 | Ethicon Llc | Surgical instrument with detection sensors |
| US10828028B2 (en) | 2016-04-15 | 2020-11-10 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10492783B2 (en) | 2016-04-15 | 2019-12-03 | Ethicon, Llc | Surgical instrument with improved stop/start control during a firing motion |
| US10433840B2 (en) | 2016-04-18 | 2019-10-08 | Ethicon Llc | Surgical instrument comprising a replaceable cartridge jaw |
| US11317917B2 (en) | 2016-04-18 | 2022-05-03 | Cilag Gmbh International | Surgical stapling system comprising a lockable firing assembly |
| US20170296173A1 (en) | 2016-04-18 | 2017-10-19 | Ethicon Endo-Surgery, Llc | Method for operating a surgical instrument |
| CA3024623A1 (en) | 2016-05-18 | 2017-11-23 | Virtual Incision Corporation | Robotic surgical devices, systems and related methods |
| USD826405S1 (en) | 2016-06-24 | 2018-08-21 | Ethicon Llc | Surgical fastener |
| USD847989S1 (en) | 2016-06-24 | 2019-05-07 | Ethicon Llc | Surgical fastener cartridge |
| JP6957532B2 (ja) | 2016-06-24 | 2021-11-02 | エシコン エルエルシーEthicon LLC | ワイヤステープル及び打ち抜き加工ステープルを含むステープルカートリッジ |
| USD850617S1 (en) | 2016-06-24 | 2019-06-04 | Ethicon Llc | Surgical fastener cartridge |
| US10893863B2 (en) | 2016-06-24 | 2021-01-19 | Ethicon Llc | Staple cartridge comprising offset longitudinal staple rows |
| US11173617B2 (en) | 2016-08-25 | 2021-11-16 | Board Of Regents Of The University Of Nebraska | Quick-release end effector tool interface |
| CA3035064A1 (en) | 2016-08-30 | 2018-03-08 | Board Of Regents Of The University Of Nebraska | Robotic device with compact joint design and an additional degree of freedom and related systems and methods |
| CN106377316B (zh) * | 2016-09-18 | 2020-07-14 | 上海交通大学 | 一种甲状腺微创外科手术操作装备 |
| US10331232B2 (en) | 2016-10-27 | 2019-06-25 | Fluidity Technologies, Inc. | Controller with situational awareness display |
| US10324487B2 (en) | 2016-10-27 | 2019-06-18 | Fluidity Technologies, Inc. | Multi-axis gimbal mounting for controller providing tactile feedback for the null command |
| US10520973B2 (en) | 2016-10-27 | 2019-12-31 | Fluidity Technologies, Inc. | Dynamically balanced multi-degrees-of-freedom hand controller |
| WO2018081662A1 (en) | 2016-10-27 | 2018-05-03 | Fluidity Technologies, Inc. | Dynamically balanced multi-degrees-of-freedom hand controller |
| US10331233B2 (en) | 2016-10-27 | 2019-06-25 | Fluidity Technologies, Inc. | Camera and sensor controls for remotely operated vehicles and virtual environments |
| US10198086B2 (en) | 2016-10-27 | 2019-02-05 | Fluidity Technologies, Inc. | Dynamically balanced, multi-degrees-of-freedom hand controller |
| CN115337111A (zh) | 2016-11-22 | 2022-11-15 | 内布拉斯加大学董事会 | 改进的粗定位装置及相关系统和方法 |
| CA3045462A1 (en) | 2016-11-29 | 2018-06-07 | Virtual Incision Corporation | User controller with user presence detection and related systems and methods |
| US10722319B2 (en) | 2016-12-14 | 2020-07-28 | Virtual Incision Corporation | Releasable attachment device for coupling to medical devices and related systems and methods |
| US10642244B2 (en) * | 2016-12-19 | 2020-05-05 | Autodesk, Inc. | Robotic augmentation of creative tasks |
| US10687810B2 (en) | 2016-12-21 | 2020-06-23 | Ethicon Llc | Stepped staple cartridge with tissue retention and gap setting features |
| CN110114014B (zh) | 2016-12-21 | 2022-08-09 | 爱惜康有限责任公司 | 包括端部执行器闭锁件和击发组件闭锁件的外科器械系统 |
| US11419606B2 (en) | 2016-12-21 | 2022-08-23 | Cilag Gmbh International | Shaft assembly comprising a clutch configured to adapt the output of a rotary firing member to two different systems |
| US20180168615A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Method of deforming staples from two different types of staple cartridges with the same surgical stapling instrument |
| US10856868B2 (en) | 2016-12-21 | 2020-12-08 | Ethicon Llc | Firing member pin configurations |
| US11134942B2 (en) | 2016-12-21 | 2021-10-05 | Cilag Gmbh International | Surgical stapling instruments and staple-forming anvils |
| US10624635B2 (en) | 2016-12-21 | 2020-04-21 | Ethicon Llc | Firing members with non-parallel jaw engagement features for surgical end effectors |
| US10426471B2 (en) | 2016-12-21 | 2019-10-01 | Ethicon Llc | Surgical instrument with multiple failure response modes |
| US20180168647A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling instruments having end effectors with positive opening features |
| US20180168625A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling instruments with smart staple cartridges |
| BR112019011947A2 (pt) | 2016-12-21 | 2019-10-29 | Ethicon Llc | sistemas de grampeamento cirúrgico |
| US11684367B2 (en) | 2016-12-21 | 2023-06-27 | Cilag Gmbh International | Stepped assembly having and end-of-life indicator |
| US11160551B2 (en) | 2016-12-21 | 2021-11-02 | Cilag Gmbh International | Articulatable surgical stapling instruments |
| US10993715B2 (en) | 2016-12-21 | 2021-05-04 | Ethicon Llc | Staple cartridge comprising staples with different clamping breadths |
| US10898186B2 (en) | 2016-12-21 | 2021-01-26 | Ethicon Llc | Staple forming pocket arrangements comprising primary sidewalls and pocket sidewalls |
| US10945727B2 (en) | 2016-12-21 | 2021-03-16 | Ethicon Llc | Staple cartridge with deformable driver retention features |
| JP7010956B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | 組織をステープル留めする方法 |
| US20180168608A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical instrument system comprising an end effector lockout and a firing assembly lockout |
| US10537325B2 (en) | 2016-12-21 | 2020-01-21 | Ethicon Llc | Staple forming pocket arrangement to accommodate different types of staples |
| US10835246B2 (en) | 2016-12-21 | 2020-11-17 | Ethicon Llc | Staple cartridges and arrangements of staples and staple cavities therein |
| US10617414B2 (en) | 2016-12-21 | 2020-04-14 | Ethicon Llc | Closure member arrangements for surgical instruments |
| US10918385B2 (en) | 2016-12-21 | 2021-02-16 | Ethicon Llc | Surgical system comprising a firing member rotatable into an articulation state to articulate an end effector of the surgical system |
| JP6983893B2 (ja) | 2016-12-21 | 2021-12-17 | エシコン エルエルシーEthicon LLC | 外科用エンドエフェクタ及び交換式ツールアセンブリのためのロックアウト構成 |
| US20180168579A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical end effector with two separate cooperating opening features for opening and closing end effector jaws |
| US10888322B2 (en) | 2016-12-21 | 2021-01-12 | Ethicon Llc | Surgical instrument comprising a cutting member |
| EP3360502A3 (en) | 2017-01-18 | 2018-10-31 | KB Medical SA | Robotic navigation of robotic surgical systems |
| WO2018148394A1 (en) | 2017-02-09 | 2018-08-16 | Vicarious Surgical Inc. | Virtual reality surgical tools system |
| US11071594B2 (en) | 2017-03-16 | 2021-07-27 | KB Medical SA | Robotic navigation of robotic surgical systems |
| US11058503B2 (en) | 2017-05-11 | 2021-07-13 | Distalmotion Sa | Translational instrument interface for surgical robot and surgical robot systems comprising the same |
| US10390841B2 (en) | 2017-06-20 | 2019-08-27 | Ethicon Llc | Control of motor velocity of a surgical stapling and cutting instrument based on angle of articulation |
| US11382638B2 (en) | 2017-06-20 | 2022-07-12 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified displacement distance |
| US10368864B2 (en) | 2017-06-20 | 2019-08-06 | Ethicon Llc | Systems and methods for controlling displaying motor velocity for a surgical instrument |
| US11090046B2 (en) | 2017-06-20 | 2021-08-17 | Cilag Gmbh International | Systems and methods for controlling displacement member motion of a surgical stapling and cutting instrument |
| US11071554B2 (en) | 2017-06-20 | 2021-07-27 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on magnitude of velocity error measurements |
| USD879809S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with changeable graphical user interface |
| US10813639B2 (en) | 2017-06-20 | 2020-10-27 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on system conditions |
| USD890784S1 (en) | 2017-06-20 | 2020-07-21 | Ethicon Llc | Display panel with changeable graphical user interface |
| USD879808S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with graphical user interface |
| US11517325B2 (en) | 2017-06-20 | 2022-12-06 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured displacement distance traveled over a specified time interval |
| US10779820B2 (en) | 2017-06-20 | 2020-09-22 | Ethicon Llc | Systems and methods for controlling motor speed according to user input for a surgical instrument |
| US10980537B2 (en) | 2017-06-20 | 2021-04-20 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified number of shaft rotations |
| US10307170B2 (en) | 2017-06-20 | 2019-06-04 | Ethicon Llc | Method for closed loop control of motor velocity of a surgical stapling and cutting instrument |
| US10888321B2 (en) | 2017-06-20 | 2021-01-12 | Ethicon Llc | Systems and methods for controlling velocity of a displacement member of a surgical stapling and cutting instrument |
| US10881399B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Techniques for adaptive control of motor velocity of a surgical stapling and cutting instrument |
| US10327767B2 (en) | 2017-06-20 | 2019-06-25 | Ethicon Llc | Control of motor velocity of a surgical stapling and cutting instrument based on angle of articulation |
| US10881396B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Surgical instrument with variable duration trigger arrangement |
| US10646220B2 (en) | 2017-06-20 | 2020-05-12 | Ethicon Llc | Systems and methods for controlling displacement member velocity for a surgical instrument |
| US11653914B2 (en) | 2017-06-20 | 2023-05-23 | Cilag Gmbh International | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument according to articulation angle of end effector |
| US10624633B2 (en) | 2017-06-20 | 2020-04-21 | Ethicon Llc | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument |
| US10993716B2 (en) | 2017-06-27 | 2021-05-04 | Ethicon Llc | Surgical anvil arrangements |
| US10856869B2 (en) | 2017-06-27 | 2020-12-08 | Ethicon Llc | Surgical anvil arrangements |
| US11324503B2 (en) | 2017-06-27 | 2022-05-10 | Cilag Gmbh International | Surgical firing member arrangements |
| US11266405B2 (en) | 2017-06-27 | 2022-03-08 | Cilag Gmbh International | Surgical anvil manufacturing methods |
| US10772629B2 (en) | 2017-06-27 | 2020-09-15 | Ethicon Llc | Surgical anvil arrangements |
| US11090049B2 (en) | 2017-06-27 | 2021-08-17 | Cilag Gmbh International | Staple forming pocket arrangements |
| US11246592B2 (en) | 2017-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical instrument comprising an articulation system lockable to a frame |
| USD906355S1 (en) | 2017-06-28 | 2020-12-29 | Ethicon Llc | Display screen or portion thereof with a graphical user interface for a surgical instrument |
| USD854151S1 (en) | 2017-06-28 | 2019-07-16 | Ethicon Llc | Surgical instrument shaft |
| US10903685B2 (en) | 2017-06-28 | 2021-01-26 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies forming capacitive channels |
| USD869655S1 (en) | 2017-06-28 | 2019-12-10 | Ethicon Llc | Surgical fastener cartridge |
| US10716614B2 (en) | 2017-06-28 | 2020-07-21 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies with increased contact pressure |
| US10211586B2 (en) | 2017-06-28 | 2019-02-19 | Ethicon Llc | Surgical shaft assemblies with watertight housings |
| US11478242B2 (en) | 2017-06-28 | 2022-10-25 | Cilag Gmbh International | Jaw retainer arrangement for retaining a pivotable surgical instrument jaw in pivotable retaining engagement with a second surgical instrument jaw |
| EP4070740A1 (en) | 2017-06-28 | 2022-10-12 | Cilag GmbH International | Surgical instrument comprising selectively actuatable rotatable couplers |
| US11259805B2 (en) | 2017-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical instrument comprising firing member supports |
| US11083455B2 (en) | 2017-06-28 | 2021-08-10 | Cilag Gmbh International | Surgical instrument comprising an articulation system ratio |
| US11564686B2 (en) | 2017-06-28 | 2023-01-31 | Cilag Gmbh International | Surgical shaft assemblies with flexible interfaces |
| US10765427B2 (en) | 2017-06-28 | 2020-09-08 | Ethicon Llc | Method for articulating a surgical instrument |
| USD851762S1 (en) | 2017-06-28 | 2019-06-18 | Ethicon Llc | Anvil |
| CA3048492C (en) * | 2017-06-29 | 2021-09-07 | Board Of Regents Of The University Of Texas System | Surgical apparatus |
| US10932772B2 (en) | 2017-06-29 | 2021-03-02 | Ethicon Llc | Methods for closed loop velocity control for robotic surgical instrument |
| US11007022B2 (en) | 2017-06-29 | 2021-05-18 | Ethicon Llc | Closed loop velocity control techniques based on sensed tissue parameters for robotic surgical instrument |
| US10398434B2 (en) | 2017-06-29 | 2019-09-03 | Ethicon Llc | Closed loop velocity control of closure member for robotic surgical instrument |
| US10258418B2 (en) | 2017-06-29 | 2019-04-16 | Ethicon Llc | System for controlling articulation forces |
| US10898183B2 (en) | 2017-06-29 | 2021-01-26 | Ethicon Llc | Robotic surgical instrument with closed loop feedback techniques for advancement of closure member during firing |
| US11135015B2 (en) | 2017-07-21 | 2021-10-05 | Globus Medical, Inc. | Robot surgical platform |
| US11944300B2 (en) | 2017-08-03 | 2024-04-02 | Cilag Gmbh International | Method for operating a surgical system bailout |
| US11304695B2 (en) | 2017-08-03 | 2022-04-19 | Cilag Gmbh International | Surgical system shaft interconnection |
| US11471155B2 (en) | 2017-08-03 | 2022-10-18 | Cilag Gmbh International | Surgical system bailout |
| US11974742B2 (en) | 2017-08-03 | 2024-05-07 | Cilag Gmbh International | Surgical system comprising an articulation bailout |
| CN111655115B (zh) | 2017-09-14 | 2023-10-13 | 维卡瑞斯外科手术股份有限公司 | 虚拟现实外科手术摄像机系统 |
| CA3076625A1 (en) | 2017-09-27 | 2019-04-04 | Virtual Incision Corporation | Robotic surgical devices with tracking camera technology and related systems and methods |
| US10743872B2 (en) | 2017-09-29 | 2020-08-18 | Ethicon Llc | System and methods for controlling a display of a surgical instrument |
| US10796471B2 (en) | 2017-09-29 | 2020-10-06 | Ethicon Llc | Systems and methods of displaying a knife position for a surgical instrument |
| USD907647S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| US10729501B2 (en) | 2017-09-29 | 2020-08-04 | Ethicon Llc | Systems and methods for language selection of a surgical instrument |
| US11399829B2 (en) | 2017-09-29 | 2022-08-02 | Cilag Gmbh International | Systems and methods of initiating a power shutdown mode for a surgical instrument |
| USD907648S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| US10765429B2 (en) | 2017-09-29 | 2020-09-08 | Ethicon Llc | Systems and methods for providing alerts according to the operational state of a surgical instrument |
| USD917500S1 (en) | 2017-09-29 | 2021-04-27 | Ethicon Llc | Display screen or portion thereof with graphical user interface |
| WO2019084505A1 (en) | 2017-10-27 | 2019-05-02 | Fluidity Technologies, Inc. | MULTI-AXIS CARDAN MOUNT FOR CONTROL DEVICE PROVIDING TOUCH FEEDBACK FOR NULL CONTROL |
| EP3700639A4 (en) | 2017-10-27 | 2021-08-25 | Fluidity Technologies, Inc. | CONTROL DEVICE EQUIPPED WITH A SITUATION KNOWLEDGE DISPLAY DEVICE |
| EP3701349A4 (en) | 2017-10-27 | 2021-07-28 | Fluidity Technologies, Inc. | CAMERA AND SENSOR CONTROLS FOR REMOTE VEHICLES AND VIRTUAL ENVIRONMENTS |
| US11134944B2 (en) | 2017-10-30 | 2021-10-05 | Cilag Gmbh International | Surgical stapler knife motion controls |
| US11090075B2 (en) | 2017-10-30 | 2021-08-17 | Cilag Gmbh International | Articulation features for surgical end effector |
| US10842490B2 (en) | 2017-10-31 | 2020-11-24 | Ethicon Llc | Cartridge body design with force reduction based on firing completion |
| US10779903B2 (en) | 2017-10-31 | 2020-09-22 | Ethicon Llc | Positive shaft rotation lock activated by jaw closure |
| US11794338B2 (en) | 2017-11-09 | 2023-10-24 | Globus Medical Inc. | Robotic rod benders and related mechanical and motor housings |
| US10898252B2 (en) | 2017-11-09 | 2021-01-26 | Globus Medical, Inc. | Surgical robotic systems for bending surgical rods, and related methods and devices |
| US11357548B2 (en) | 2017-11-09 | 2022-06-14 | Globus Medical, Inc. | Robotic rod benders and related mechanical and motor housings |
| US11134862B2 (en) | 2017-11-10 | 2021-10-05 | Globus Medical, Inc. | Methods of selecting surgical implants and related devices |
| WO2019108437A2 (en) | 2017-11-29 | 2019-06-06 | Covidien Lp | Robotic surgical systems, instrument drive assemblies, and drive assemblies |
| US10687813B2 (en) | 2017-12-15 | 2020-06-23 | Ethicon Llc | Adapters with firing stroke sensing arrangements for use in connection with electromechanical surgical instruments |
| US11006955B2 (en) | 2017-12-15 | 2021-05-18 | Ethicon Llc | End effectors with positive jaw opening features for use with adapters for electromechanical surgical instruments |
| US10779825B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Adapters with end effector position sensing and control arrangements for use in connection with electromechanical surgical instruments |
| US11197670B2 (en) | 2017-12-15 | 2021-12-14 | Cilag Gmbh International | Surgical end effectors with pivotal jaws configured to touch at their respective distal ends when fully closed |
| US10828033B2 (en) | 2017-12-15 | 2020-11-10 | Ethicon Llc | Handheld electromechanical surgical instruments with improved motor control arrangements for positioning components of an adapter coupled thereto |
| US10869666B2 (en) | 2017-12-15 | 2020-12-22 | Ethicon Llc | Adapters with control systems for controlling multiple motors of an electromechanical surgical instrument |
| US11071543B2 (en) | 2017-12-15 | 2021-07-27 | Cilag Gmbh International | Surgical end effectors with clamping assemblies configured to increase jaw aperture ranges |
| US10743874B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Sealed adapters for use with electromechanical surgical instruments |
| US11033267B2 (en) | 2017-12-15 | 2021-06-15 | Ethicon Llc | Systems and methods of controlling a clamping member firing rate of a surgical instrument |
| US10966718B2 (en) | 2017-12-15 | 2021-04-06 | Ethicon Llc | Dynamic clamping assemblies with improved wear characteristics for use in connection with electromechanical surgical instruments |
| US10779826B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Methods of operating surgical end effectors |
| US10743875B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Surgical end effectors with jaw stiffener arrangements configured to permit monitoring of firing member |
| US10716565B2 (en) | 2017-12-19 | 2020-07-21 | Ethicon Llc | Surgical instruments with dual articulation drivers |
| USD910847S1 (en) | 2017-12-19 | 2021-02-16 | Ethicon Llc | Surgical instrument assembly |
| US11020112B2 (en) | 2017-12-19 | 2021-06-01 | Ethicon Llc | Surgical tools configured for interchangeable use with different controller interfaces |
| US10835330B2 (en) | 2017-12-19 | 2020-11-17 | Ethicon Llc | Method for determining the position of a rotatable jaw of a surgical instrument attachment assembly |
| US11045270B2 (en) | 2017-12-19 | 2021-06-29 | Cilag Gmbh International | Robotic attachment comprising exterior drive actuator |
| US10729509B2 (en) | 2017-12-19 | 2020-08-04 | Ethicon Llc | Surgical instrument comprising closure and firing locking mechanism |
| US11129680B2 (en) | 2017-12-21 | 2021-09-28 | Cilag Gmbh International | Surgical instrument comprising a projector |
| US11076853B2 (en) | 2017-12-21 | 2021-08-03 | Cilag Gmbh International | Systems and methods of displaying a knife position during transection for a surgical instrument |
| US11311290B2 (en) | 2017-12-21 | 2022-04-26 | Cilag Gmbh International | Surgical instrument comprising an end effector dampener |
| US10743868B2 (en) | 2017-12-21 | 2020-08-18 | Ethicon Llc | Surgical instrument comprising a pivotable distal head |
| US11013564B2 (en) | 2018-01-05 | 2021-05-25 | Board Of Regents Of The University Of Nebraska | Single-arm robotic device with compact joint design and related systems and methods |
| KR20240104190A (ko) | 2018-01-26 | 2024-07-04 | 마코 서지컬 코포레이션 | 수술 로봇 시스템에 의해 가이드되는 구동 도구를 위한 엔드 이펙터 및 방법 |
| CA3089681A1 (en) | 2018-02-07 | 2019-08-15 | Distalmotion Sa | Surgical robot systems comprising robotic telemanipulators and integrated laparoscopy |
| US20190254753A1 (en) | 2018-02-19 | 2019-08-22 | Globus Medical, Inc. | Augmented reality navigation systems for use with robotic surgical systems and methods of their use |
| US11980434B2 (en) | 2018-02-20 | 2024-05-14 | Intuitive Surgical Operations, Inc. | Systems and methods for control of end effectors |
| US10573023B2 (en) | 2018-04-09 | 2020-02-25 | Globus Medical, Inc. | Predictive visualization of medical imaging scanner component movement |
| USD914878S1 (en) | 2018-08-20 | 2021-03-30 | Ethicon Llc | Surgical instrument anvil |
| US11324501B2 (en) | 2018-08-20 | 2022-05-10 | Cilag Gmbh International | Surgical stapling devices with improved closure members |
| US11207065B2 (en) | 2018-08-20 | 2021-12-28 | Cilag Gmbh International | Method for fabricating surgical stapler anvils |
| US11083458B2 (en) | 2018-08-20 | 2021-08-10 | Cilag Gmbh International | Powered surgical instruments with clutching arrangements to convert linear drive motions to rotary drive motions |
| US10912559B2 (en) | 2018-08-20 | 2021-02-09 | Ethicon Llc | Reinforced deformable anvil tip for surgical stapler anvil |
| US11253256B2 (en) | 2018-08-20 | 2022-02-22 | Cilag Gmbh International | Articulatable motor powered surgical instruments with dedicated articulation motor arrangements |
| US10856870B2 (en) | 2018-08-20 | 2020-12-08 | Ethicon Llc | Switching arrangements for motor powered articulatable surgical instruments |
| US11039834B2 (en) | 2018-08-20 | 2021-06-22 | Cilag Gmbh International | Surgical stapler anvils with staple directing protrusions and tissue stability features |
| US11045192B2 (en) | 2018-08-20 | 2021-06-29 | Cilag Gmbh International | Fabricating techniques for surgical stapler anvils |
| US11291440B2 (en) | 2018-08-20 | 2022-04-05 | Cilag Gmbh International | Method for operating a powered articulatable surgical instrument |
| US10842492B2 (en) | 2018-08-20 | 2020-11-24 | Ethicon Llc | Powered articulatable surgical instruments with clutching and locking arrangements for linking an articulation drive system to a firing drive system |
| US10779821B2 (en) | 2018-08-20 | 2020-09-22 | Ethicon Llc | Surgical stapler anvils with tissue stop features configured to avoid tissue pinch |
| US11337742B2 (en) | 2018-11-05 | 2022-05-24 | Globus Medical Inc | Compliant orthopedic driver |
| US11278360B2 (en) | 2018-11-16 | 2022-03-22 | Globus Medical, Inc. | End-effectors for surgical robotic systems having sealed optical components |
| US11744655B2 (en) | 2018-12-04 | 2023-09-05 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| US11602402B2 (en) | 2018-12-04 | 2023-03-14 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| JP7546926B2 (ja) | 2019-01-07 | 2024-09-09 | バーチャル インシジョン コーポレイション | ロボット支援手術システムと関連する装置と方法 |
| KR102206472B1 (ko) * | 2019-03-12 | 2021-01-22 | 재단법인 아산사회복지재단 | 수술용 로봇, 수술용 로봇 시스템 및 핸드헬드 의료기구 |
| US11918313B2 (en) | 2019-03-15 | 2024-03-05 | Globus Medical Inc. | Active end effectors for surgical robots |
| US11382549B2 (en) | 2019-03-22 | 2022-07-12 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| US11419616B2 (en) | 2019-03-22 | 2022-08-23 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11806084B2 (en) | 2019-03-22 | 2023-11-07 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| US11571265B2 (en) | 2019-03-22 | 2023-02-07 | Globus Medical Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US20200297357A1 (en) | 2019-03-22 | 2020-09-24 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11317978B2 (en) | 2019-03-22 | 2022-05-03 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11696761B2 (en) | 2019-03-25 | 2023-07-11 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11147551B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11147553B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11172929B2 (en) | 2019-03-25 | 2021-11-16 | Cilag Gmbh International | Articulation drive arrangements for surgical systems |
| CN109946307B (zh) * | 2019-03-29 | 2023-10-20 | 北京城建五建设集团有限公司 | 一种可伸缩电动转向检查镜及其使用方法 |
| US11452528B2 (en) | 2019-04-30 | 2022-09-27 | Cilag Gmbh International | Articulation actuators for a surgical instrument |
| US11426251B2 (en) | 2019-04-30 | 2022-08-30 | Cilag Gmbh International | Articulation directional lights on a surgical instrument |
| US11253254B2 (en) | 2019-04-30 | 2022-02-22 | Cilag Gmbh International | Shaft rotation actuator on a surgical instrument |
| US11903581B2 (en) | 2019-04-30 | 2024-02-20 | Cilag Gmbh International | Methods for stapling tissue using a surgical instrument |
| US11471157B2 (en) | 2019-04-30 | 2022-10-18 | Cilag Gmbh International | Articulation control mapping for a surgical instrument |
| US11432816B2 (en) | 2019-04-30 | 2022-09-06 | Cilag Gmbh International | Articulation pin for a surgical instrument |
| US11648009B2 (en) | 2019-04-30 | 2023-05-16 | Cilag Gmbh International | Rotatable jaw tip for a surgical instrument |
| US11045179B2 (en) | 2019-05-20 | 2021-06-29 | Global Medical Inc | Robot-mounted retractor system |
| US11298132B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Inlernational | Staple cartridge including a honeycomb extension |
| US11291451B2 (en) | 2019-06-28 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with battery compatibility verification functionality |
| US11523822B2 (en) | 2019-06-28 | 2022-12-13 | Cilag Gmbh International | Battery pack including a circuit interrupter |
| US11399837B2 (en) | 2019-06-28 | 2022-08-02 | Cilag Gmbh International | Mechanisms for motor control adjustments of a motorized surgical instrument |
| US11224497B2 (en) | 2019-06-28 | 2022-01-18 | Cilag Gmbh International | Surgical systems with multiple RFID tags |
| US11478241B2 (en) | 2019-06-28 | 2022-10-25 | Cilag Gmbh International | Staple cartridge including projections |
| US11376098B2 (en) | 2019-06-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument system comprising an RFID system |
| US11771419B2 (en) | 2019-06-28 | 2023-10-03 | Cilag Gmbh International | Packaging for a replaceable component of a surgical stapling system |
| US11497492B2 (en) | 2019-06-28 | 2022-11-15 | Cilag Gmbh International | Surgical instrument including an articulation lock |
| US12004740B2 (en) | 2019-06-28 | 2024-06-11 | Cilag Gmbh International | Surgical stapling system having an information decryption protocol |
| US11660163B2 (en) | 2019-06-28 | 2023-05-30 | Cilag Gmbh International | Surgical system with RFID tags for updating motor assembly parameters |
| US11553971B2 (en) | 2019-06-28 | 2023-01-17 | Cilag Gmbh International | Surgical RFID assemblies for display and communication |
| US11298127B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Interational | Surgical stapling system having a lockout mechanism for an incompatible cartridge |
| US11219455B2 (en) | 2019-06-28 | 2022-01-11 | Cilag Gmbh International | Surgical instrument including a lockout key |
| US11259803B2 (en) | 2019-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling system having an information encryption protocol |
| US11051807B2 (en) | 2019-06-28 | 2021-07-06 | Cilag Gmbh International | Packaging assembly including a particulate trap |
| US11464601B2 (en) | 2019-06-28 | 2022-10-11 | Cilag Gmbh International | Surgical instrument comprising an RFID system for tracking a movable component |
| US11229437B2 (en) | 2019-06-28 | 2022-01-25 | Cilag Gmbh International | Method for authenticating the compatibility of a staple cartridge with a surgical instrument |
| US11627959B2 (en) | 2019-06-28 | 2023-04-18 | Cilag Gmbh International | Surgical instruments including manual and powered system lockouts |
| US11426167B2 (en) | 2019-06-28 | 2022-08-30 | Cilag Gmbh International | Mechanisms for proper anvil attachment surgical stapling head assembly |
| US11638587B2 (en) | 2019-06-28 | 2023-05-02 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11684434B2 (en) | 2019-06-28 | 2023-06-27 | Cilag Gmbh International | Surgical RFID assemblies for instrument operational setting control |
| US11246678B2 (en) | 2019-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical stapling system having a frangible RFID tag |
| US11628023B2 (en) | 2019-07-10 | 2023-04-18 | Globus Medical, Inc. | Robotic navigational system for interbody implants |
| US11571171B2 (en) | 2019-09-24 | 2023-02-07 | Globus Medical, Inc. | Compound curve cable chain |
| US11426178B2 (en) | 2019-09-27 | 2022-08-30 | Globus Medical Inc. | Systems and methods for navigating a pin guide driver |
| US11864857B2 (en) | 2019-09-27 | 2024-01-09 | Globus Medical, Inc. | Surgical robot with passive end effector |
| US11890066B2 (en) | 2019-09-30 | 2024-02-06 | Globus Medical, Inc | Surgical robot with passive end effector |
| US11510684B2 (en) | 2019-10-14 | 2022-11-29 | Globus Medical, Inc. | Rotary motion passive end effector for surgical robots in orthopedic surgeries |
| US11599107B2 (en) | 2019-12-09 | 2023-03-07 | Fluidity Technologies Inc. | Apparatus, methods and systems for remote or onboard control of flights |
| US12133772B2 (en) | 2019-12-10 | 2024-11-05 | Globus Medical, Inc. | Augmented reality headset for navigated robotic surgery |
| US11992373B2 (en) | 2019-12-10 | 2024-05-28 | Globus Medical, Inc | Augmented reality headset with varied opacity for navigated robotic surgery |
| US12064189B2 (en) | 2019-12-13 | 2024-08-20 | Globus Medical, Inc. | Navigated instrument for use in robotic guided surgery |
| US11701111B2 (en) | 2019-12-19 | 2023-07-18 | Cilag Gmbh International | Method for operating a surgical stapling instrument |
| US11607219B2 (en) | 2019-12-19 | 2023-03-21 | Cilag Gmbh International | Staple cartridge comprising a detachable tissue cutting knife |
| US11911032B2 (en) | 2019-12-19 | 2024-02-27 | Cilag Gmbh International | Staple cartridge comprising a seating cam |
| US11446029B2 (en) | 2019-12-19 | 2022-09-20 | Cilag Gmbh International | Staple cartridge comprising projections extending from a curved deck surface |
| US11234698B2 (en) | 2019-12-19 | 2022-02-01 | Cilag Gmbh International | Stapling system comprising a clamp lockout and a firing lockout |
| US11504122B2 (en) | 2019-12-19 | 2022-11-22 | Cilag Gmbh International | Surgical instrument comprising a nested firing member |
| US11529139B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Motor driven surgical instrument |
| US11529137B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US12035913B2 (en) | 2019-12-19 | 2024-07-16 | Cilag Gmbh International | Staple cartridge comprising a deployable knife |
| US11304696B2 (en) | 2019-12-19 | 2022-04-19 | Cilag Gmbh International | Surgical instrument comprising a powered articulation system |
| US11844520B2 (en) | 2019-12-19 | 2023-12-19 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11291447B2 (en) | 2019-12-19 | 2022-04-05 | Cilag Gmbh International | Stapling instrument comprising independent jaw closing and staple firing systems |
| US11931033B2 (en) | 2019-12-19 | 2024-03-19 | Cilag Gmbh International | Staple cartridge comprising a latch lockout |
| US11559304B2 (en) | 2019-12-19 | 2023-01-24 | Cilag Gmbh International | Surgical instrument comprising a rapid closure mechanism |
| US11576672B2 (en) | 2019-12-19 | 2023-02-14 | Cilag Gmbh International | Surgical instrument comprising a closure system including a closure member and an opening member driven by a drive screw |
| US11464512B2 (en) | 2019-12-19 | 2022-10-11 | Cilag Gmbh International | Staple cartridge comprising a curved deck surface |
| US11382699B2 (en) | 2020-02-10 | 2022-07-12 | Globus Medical Inc. | Extended reality visualization of optical tool tracking volume for computer assisted navigation in surgery |
| US11207150B2 (en) | 2020-02-19 | 2021-12-28 | Globus Medical, Inc. | Displaying a virtual model of a planned instrument attachment to ensure correct selection of physical instrument attachment |
| US11253216B2 (en) | 2020-04-28 | 2022-02-22 | Globus Medical Inc. | Fixtures for fluoroscopic imaging systems and related navigation systems and methods |
| US11510750B2 (en) | 2020-05-08 | 2022-11-29 | Globus Medical, Inc. | Leveraging two-dimensional digital imaging and communication in medicine imagery in three-dimensional extended reality applications |
| US11153555B1 (en) | 2020-05-08 | 2021-10-19 | Globus Medical Inc. | Extended reality headset camera system for computer assisted navigation in surgery |
| US11382700B2 (en) | 2020-05-08 | 2022-07-12 | Globus Medical Inc. | Extended reality headset tool tracking and control |
| USD966512S1 (en) | 2020-06-02 | 2022-10-11 | Cilag Gmbh International | Staple cartridge |
| USD975850S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD974560S1 (en) | 2020-06-02 | 2023-01-03 | Cilag Gmbh International | Staple cartridge |
| USD975278S1 (en) | 2020-06-02 | 2023-01-10 | Cilag Gmbh International | Staple cartridge |
| USD967421S1 (en) | 2020-06-02 | 2022-10-18 | Cilag Gmbh International | Staple cartridge |
| USD976401S1 (en) | 2020-06-02 | 2023-01-24 | Cilag Gmbh International | Staple cartridge |
| USD975851S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| US12070276B2 (en) | 2020-06-09 | 2024-08-27 | Globus Medical Inc. | Surgical object tracking in visible light via fiducial seeding and synthetic image registration |
| US11317973B2 (en) | 2020-06-09 | 2022-05-03 | Globus Medical, Inc. | Camera tracking bar for computer assisted navigation during surgery |
| US11382713B2 (en) | 2020-06-16 | 2022-07-12 | Globus Medical, Inc. | Navigated surgical system with eye to XR headset display calibration |
| CN115802979A (zh) * | 2020-07-09 | 2023-03-14 | 索尼集团公司 | 医疗臂装置 |
| US11877807B2 (en) | 2020-07-10 | 2024-01-23 | Globus Medical, Inc | Instruments for navigated orthopedic surgeries |
| US11793588B2 (en) | 2020-07-23 | 2023-10-24 | Globus Medical, Inc. | Sterile draping of robotic arms |
| US20220031320A1 (en) | 2020-07-28 | 2022-02-03 | Cilag Gmbh International | Surgical instruments with flexible firing member actuator constraint arrangements |
| US11737831B2 (en) | 2020-09-02 | 2023-08-29 | Globus Medical Inc. | Surgical object tracking template generation for computer assisted navigation during surgical procedure |
| US11523785B2 (en) | 2020-09-24 | 2022-12-13 | Globus Medical, Inc. | Increased cone beam computed tomography volume length without requiring stitching or longitudinal C-arm movement |
| US11911112B2 (en) | 2020-10-27 | 2024-02-27 | Globus Medical, Inc. | Robotic navigational system |
| US12076091B2 (en) | 2020-10-27 | 2024-09-03 | Globus Medical, Inc. | Robotic navigational system |
| US11844518B2 (en) | 2020-10-29 | 2023-12-19 | Cilag Gmbh International | Method for operating a surgical instrument |
| US12053175B2 (en) | 2020-10-29 | 2024-08-06 | Cilag Gmbh International | Surgical instrument comprising a stowed closure actuator stop |
| US11779330B2 (en) | 2020-10-29 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a jaw alignment system |
| USD980425S1 (en) | 2020-10-29 | 2023-03-07 | Cilag Gmbh International | Surgical instrument assembly |
| US11931025B2 (en) | 2020-10-29 | 2024-03-19 | Cilag Gmbh International | Surgical instrument comprising a releasable closure drive lock |
| US11896217B2 (en) | 2020-10-29 | 2024-02-13 | Cilag Gmbh International | Surgical instrument comprising an articulation lock |
| USD1013170S1 (en) | 2020-10-29 | 2024-01-30 | Cilag Gmbh International | Surgical instrument assembly |
| US11717289B2 (en) | 2020-10-29 | 2023-08-08 | Cilag Gmbh International | Surgical instrument comprising an indicator which indicates that an articulation drive is actuatable |
| US11452526B2 (en) | 2020-10-29 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising a staged voltage regulation start-up system |
| US11534259B2 (en) | 2020-10-29 | 2022-12-27 | Cilag Gmbh International | Surgical instrument comprising an articulation indicator |
| US11517390B2 (en) | 2020-10-29 | 2022-12-06 | Cilag Gmbh International | Surgical instrument comprising a limited travel switch |
| US11617577B2 (en) | 2020-10-29 | 2023-04-04 | Cilag Gmbh International | Surgical instrument comprising a sensor configured to sense whether an articulation drive of the surgical instrument is actuatable |
| US11941814B2 (en) | 2020-11-04 | 2024-03-26 | Globus Medical Inc. | Auto segmentation using 2-D images taken during 3-D imaging spin |
| US11717350B2 (en) | 2020-11-24 | 2023-08-08 | Globus Medical Inc. | Methods for robotic assistance and navigation in spinal surgery and related systems |
| US11627960B2 (en) | 2020-12-02 | 2023-04-18 | Cilag Gmbh International | Powered surgical instruments with smart reload with separately attachable exteriorly mounted wiring connections |
| US11944296B2 (en) | 2020-12-02 | 2024-04-02 | Cilag Gmbh International | Powered surgical instruments with external connectors |
| US11653920B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Powered surgical instruments with communication interfaces through sterile barrier |
| US11890010B2 (en) | 2020-12-02 | 2024-02-06 | Cllag GmbH International | Dual-sided reinforced reload for surgical instruments |
| US11744581B2 (en) | 2020-12-02 | 2023-09-05 | Cilag Gmbh International | Powered surgical instruments with multi-phase tissue treatment |
| US11849943B2 (en) | 2020-12-02 | 2023-12-26 | Cilag Gmbh International | Surgical instrument with cartridge release mechanisms |
| US11678882B2 (en) | 2020-12-02 | 2023-06-20 | Cilag Gmbh International | Surgical instruments with interactive features to remedy incidental sled movements |
| US11737751B2 (en) | 2020-12-02 | 2023-08-29 | Cilag Gmbh International | Devices and methods of managing energy dissipated within sterile barriers of surgical instrument housings |
| US11653915B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Surgical instruments with sled location detection and adjustment features |
| US20220218431A1 (en) | 2021-01-08 | 2022-07-14 | Globus Medical, Inc. | System and method for ligament balancing with robotic assistance |
| US11751869B2 (en) | 2021-02-26 | 2023-09-12 | Cilag Gmbh International | Monitoring of multiple sensors over time to detect moving characteristics of tissue |
| US12108951B2 (en) | 2021-02-26 | 2024-10-08 | Cilag Gmbh International | Staple cartridge comprising a sensing array and a temperature control system |
| US11980362B2 (en) | 2021-02-26 | 2024-05-14 | Cilag Gmbh International | Surgical instrument system comprising a power transfer coil |
| US11793514B2 (en) | 2021-02-26 | 2023-10-24 | Cilag Gmbh International | Staple cartridge comprising sensor array which may be embedded in cartridge body |
| US11749877B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Stapling instrument comprising a signal antenna |
| US11925349B2 (en) | 2021-02-26 | 2024-03-12 | Cilag Gmbh International | Adjustment to transfer parameters to improve available power |
| US11730473B2 (en) | 2021-02-26 | 2023-08-22 | Cilag Gmbh International | Monitoring of manufacturing life-cycle |
| US11701113B2 (en) | 2021-02-26 | 2023-07-18 | Cilag Gmbh International | Stapling instrument comprising a separate power antenna and a data transfer antenna |
| US11812964B2 (en) | 2021-02-26 | 2023-11-14 | Cilag Gmbh International | Staple cartridge comprising a power management circuit |
| US11950777B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Staple cartridge comprising an information access control system |
| US11723657B2 (en) | 2021-02-26 | 2023-08-15 | Cilag Gmbh International | Adjustable communication based on available bandwidth and power capacity |
| US11744583B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Distal communication array to tune frequency of RF systems |
| US11950779B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Method of powering and communicating with a staple cartridge |
| US11696757B2 (en) | 2021-02-26 | 2023-07-11 | Cilag Gmbh International | Monitoring of internal systems to detect and track cartridge motion status |
| US11759202B2 (en) | 2021-03-22 | 2023-09-19 | Cilag Gmbh International | Staple cartridge comprising an implantable layer |
| US11806011B2 (en) | 2021-03-22 | 2023-11-07 | Cilag Gmbh International | Stapling instrument comprising tissue compression systems |
| US11737749B2 (en) | 2021-03-22 | 2023-08-29 | Cilag Gmbh International | Surgical stapling instrument comprising a retraction system |
| US11717291B2 (en) | 2021-03-22 | 2023-08-08 | Cilag Gmbh International | Staple cartridge comprising staples configured to apply different tissue compression |
| US11826042B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Surgical instrument comprising a firing drive including a selectable leverage mechanism |
| US11723658B2 (en) | 2021-03-22 | 2023-08-15 | Cilag Gmbh International | Staple cartridge comprising a firing lockout |
| US11826012B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising a pulsed motor-driven firing rack |
| US11849945B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising eccentrically driven firing member |
| US11786243B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Firing members having flexible portions for adapting to a load during a surgical firing stroke |
| US11944336B2 (en) | 2021-03-24 | 2024-04-02 | Cilag Gmbh International | Joint arrangements for multi-planar alignment and support of operational drive shafts in articulatable surgical instruments |
| US12102323B2 (en) | 2021-03-24 | 2024-10-01 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising a floatable component |
| US11857183B2 (en) | 2021-03-24 | 2024-01-02 | Cilag Gmbh International | Stapling assembly components having metal substrates and plastic bodies |
| US11793516B2 (en) | 2021-03-24 | 2023-10-24 | Cilag Gmbh International | Surgical staple cartridge comprising longitudinal support beam |
| US11832816B2 (en) | 2021-03-24 | 2023-12-05 | Cilag Gmbh International | Surgical stapling assembly comprising nonplanar staples and planar staples |
| US11903582B2 (en) | 2021-03-24 | 2024-02-20 | Cilag Gmbh International | Leveraging surfaces for cartridge installation |
| US11786239B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Surgical instrument articulation joint arrangements comprising multiple moving linkage features |
| US11896219B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Mating features between drivers and underside of a cartridge deck |
| US11896218B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Method of using a powered stapling device |
| US11849944B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Drivers for fastener cartridge assemblies having rotary drive screws |
| US11744603B2 (en) | 2021-03-24 | 2023-09-05 | Cilag Gmbh International | Multi-axis pivot joints for surgical instruments and methods for manufacturing same |
| US11723662B2 (en) | 2021-05-28 | 2023-08-15 | Cilag Gmbh International | Stapling instrument comprising an articulation control display |
| CN113331952B (zh) * | 2021-06-28 | 2023-02-17 | 上海交通大学 | 基于纤维胆道镜的手术机器人 |
| US11857273B2 (en) | 2021-07-06 | 2024-01-02 | Globus Medical, Inc. | Ultrasonic robotic surgical navigation |
| US11439444B1 (en) | 2021-07-22 | 2022-09-13 | Globus Medical, Inc. | Screw tower and rod reduction tool |
| EP4401666A1 (en) | 2021-09-13 | 2024-07-24 | DistalMotion SA | Instruments for surgical robotic system and interfaces for the same |
| US11957337B2 (en) | 2021-10-18 | 2024-04-16 | Cilag Gmbh International | Surgical stapling assembly with offset ramped drive surfaces |
| US11980363B2 (en) | 2021-10-18 | 2024-05-14 | Cilag Gmbh International | Row-to-row staple array variations |
| US11877745B2 (en) | 2021-10-18 | 2024-01-23 | Cilag Gmbh International | Surgical stapling assembly having longitudinally-repeating staple leg clusters |
| US12089841B2 (en) | 2021-10-28 | 2024-09-17 | Cilag CmbH International | Staple cartridge identification systems |
| US11937816B2 (en) | 2021-10-28 | 2024-03-26 | Cilag Gmbh International | Electrical lead arrangements for surgical instruments |
| US11911115B2 (en) | 2021-12-20 | 2024-02-27 | Globus Medical Inc. | Flat panel registration fixture and method of using same |
| US12103480B2 (en) | 2022-03-18 | 2024-10-01 | Globus Medical Inc. | Omni-wheel cable pusher |
| US12048493B2 (en) | 2022-03-31 | 2024-07-30 | Globus Medical, Inc. | Camera tracking system identifying phantom markers during computer assisted surgery navigation |
| US11662835B1 (en) | 2022-04-26 | 2023-05-30 | Fluidity Technologies Inc. | System and methods for controlling motion of a target object and providing discrete, directional tactile feedback |
| US11696633B1 (en) | 2022-04-26 | 2023-07-11 | Fluidity Technologies Inc. | System and methods for controlling motion of a target object and providing discrete, directional tactile feedback |
| US11844585B1 (en) | 2023-02-10 | 2023-12-19 | Distalmotion Sa | Surgical robotics systems and devices having a sterile restart, and methods thereof |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6786896B1 (en) | 1997-09-19 | 2004-09-07 | Massachusetts Institute Of Technology | Robotic apparatus |
| US20080071291A1 (en) * | 2006-06-13 | 2008-03-20 | Intuitive Surgical, Inc. | Minimally invasive surgical system |
| JP2009160011A (ja) * | 2007-12-28 | 2009-07-23 | Terumo Corp | 医療用マニピュレータ及び医療用ロボットシステム |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4834761A (en) * | 1985-05-09 | 1989-05-30 | Walters David A | Robotic multiple-jointed digit control system |
| JPH0829509B2 (ja) * | 1986-12-12 | 1996-03-27 | 株式会社日立製作所 | マニピユレ−タの制御装置 |
| US5373747A (en) * | 1991-03-30 | 1994-12-20 | Kabushiki Kaisha Toshiba | Robot hand and robot |
| US5762458A (en) * | 1996-02-20 | 1998-06-09 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| JP2665052B2 (ja) * | 1993-05-14 | 1997-10-22 | エスアールアイ インターナショナル | 遠隔中心位置決め装置 |
| US5779623A (en) * | 1993-10-08 | 1998-07-14 | Leonard Medical, Inc. | Positioner for medical instruments |
| JPH10505286A (ja) * | 1995-06-20 | 1998-05-26 | シン ング、ワン | 医療処置のための関節アーム |
| US5710870A (en) * | 1995-09-07 | 1998-01-20 | California Institute Of Technology | Decoupled six degree-of-freedom robot manipulator |
| US5855583A (en) * | 1996-02-20 | 1999-01-05 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US5807377A (en) * | 1996-05-20 | 1998-09-15 | Intuitive Surgical, Inc. | Force-reflecting surgical instrument and positioning mechanism for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US6331181B1 (en) * | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US6228089B1 (en) * | 1997-12-19 | 2001-05-08 | Depuy International Limited | Device for positioning and guiding a surgical instrument during orthopaedic interventions |
| US6197017B1 (en) * | 1998-02-24 | 2001-03-06 | Brock Rogers Surgical, Inc. | Articulated apparatus for telemanipulator system |
| US6676684B1 (en) * | 2001-09-04 | 2004-01-13 | Intuitive Surgical, Inc. | Roll-pitch-roll-yaw surgical tool |
| US20050096502A1 (en) * | 2003-10-29 | 2005-05-05 | Khalili Theodore M. | Robotic surgical device |
| CA2513202C (en) * | 2004-07-23 | 2015-03-31 | Mehran Anvari | Multi-purpose robotic operating system and method |
| JP4373879B2 (ja) | 2004-08-26 | 2009-11-25 | 株式会社日立製作所 | 手術器具 |
| ATE540634T1 (de) * | 2005-06-06 | 2012-01-15 | Intuitive Surgical Operations | Laparoskopisches ultraschall-robotersystem für chirurgische zwecke |
| JP2008114339A (ja) * | 2006-11-06 | 2008-05-22 | Terumo Corp | マニピュレータ |
-
2008
- 2008-10-31 KR KR1020080108103A patent/KR101075363B1/ko active IP Right Grant
-
2009
- 2009-10-30 EP EP09823851.2A patent/EP2349015A4/en not_active Withdrawn
- 2009-10-30 WO PCT/KR2009/006333 patent/WO2010050771A2/en active Application Filing
- 2009-10-30 US US13/127,009 patent/US9089352B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6786896B1 (en) | 1997-09-19 | 2004-09-07 | Massachusetts Institute Of Technology | Robotic apparatus |
| US20080071291A1 (en) * | 2006-06-13 | 2008-03-20 | Intuitive Surgical, Inc. | Minimally invasive surgical system |
| JP2009160011A (ja) * | 2007-12-28 | 2009-07-23 | Terumo Corp | 医療用マニピュレータ及び医療用ロボットシステム |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101458067B1 (ko) | 2006-06-05 | 2014-11-04 | 세녹스, 아이엔씨 | 통합 초음파 영상 시스템을 구비한 생검 시스템 |
| CN102917662A (zh) * | 2010-05-25 | 2013-02-06 | 郑昶旭 | 能够实现单一通道手术模式和多通道手术模式的手术用机器人系统及其控制方法 |
| KR101372189B1 (ko) | 2012-04-27 | 2014-03-07 | 한양대학교 에리카산학협력단 | 수술도구의 위치변경이 가능한 수술로봇 |
| WO2014028699A1 (en) * | 2012-08-15 | 2014-02-20 | Intuitive Surgical Operations, Inc. | Movable surgical mounting platform controlled by manual motion of robotic arms |
| US9259281B2 (en) | 2012-08-15 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Movable surgical mounting platform controlled by manual motion of robotic arms |
| US9999476B2 (en) | 2012-08-15 | 2018-06-19 | Intuitive Surgical Operations, Inc. | Movable surgical mounting platform controlled by manual motion of robotic arms |
| US10646297B2 (en) | 2012-08-15 | 2020-05-12 | Intuitive Surgical Operations, Inc. | Movable surgical mounting platform controlled by manual motion of robotic arms |
| US11298200B2 (en) | 2012-08-15 | 2022-04-12 | Intuitive Surgical Operations, Inc. | Techniques for operating a kinematic structure by manual motion of link coupled to the kinematic structure |
| US11974828B2 (en) | 2012-08-15 | 2024-05-07 | Intuitive Surgical Operations, Inc. | Techniques for operating a kinematic structure by manual motion of link coupled to the kinematic structure |
| KR20210011625A (ko) * | 2019-07-23 | 2021-02-02 | (주)이롭 | 다관절 로봇 제어방법 및 시스템 |
| KR102269985B1 (ko) * | 2019-07-23 | 2021-06-28 | (주)이롭 | 다관절 로봇 제어방법 및 시스템 |
| KR20220078021A (ko) | 2020-12-03 | 2022-06-10 | (주)이롭 | 복강경 수술을 보조하는 엔드이펙터 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2349015A4 (en) | 2015-01-21 |
| WO2010050771A2 (en) | 2010-05-06 |
| US20110213384A1 (en) | 2011-09-01 |
| EP2349015A2 (en) | 2011-08-03 |
| US9089352B2 (en) | 2015-07-28 |
| KR20100048789A (ko) | 2010-05-11 |
| WO2010050771A3 (en) | 2010-08-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101075363B1 (ko) | 최소 침습 수술 도구를 포함하는 수술용 로봇 시스템 | |
| KR101259701B1 (ko) | 굽은 샤프트를 갖는 최소 침습 수술 기구 | |
| KR101056232B1 (ko) | 최소 침습 수술 도구 및 그 사용 방법 | |
| KR101064825B1 (ko) | 최소 침습 수술 기구 | |
| JP6038453B2 (ja) | 最小侵襲手術用器具 | |
| JP4912150B2 (ja) | 外科用器具 | |
| KR101181569B1 (ko) | 단일 통로 수술 모드와 다통로 수술 모드를 실현할 수 있는 수술용 로봇 시스템 및 그 제어 방법 | |
| KR100999466B1 (ko) | 최소 침습 수술 도구 및 그 사용 방법 | |
| KR101075294B1 (ko) | 최소 침습 수술 기구 | |
| US6685698B2 (en) | Roll-pitch-roll surgical tool | |
| US6902560B1 (en) | Roll-pitch-roll surgical tool | |
| US20230190398A1 (en) | Medical devices having three tool members | |
| US20090171374A1 (en) | Medical manipulator and medical robot system | |
| US20210022819A1 (en) | Articulable medical devices having flexible wire routing | |
| US20100262162A1 (en) | Medical manipulator and medical robot system | |
| KR101521289B1 (ko) | 개선된 관절부를 갖는 최소 침습 수술 기구 | |
| EP2361577B1 (en) | Tension mechanism for articulation drive cables | |
| EP2413776A2 (en) | Surgical instrument | |
| KR20110028613A (ko) | 최소 침습 수술 도구 | |
| KR20130023311A (ko) | 굽은 샤프트를 갖는 최소 침습 수술 기구 | |
| KR20190096544A (ko) | 복강경 수술장치 | |
| KR101336381B1 (ko) | 최소 침습 수술 기구 | |
| KR20130133153A (ko) | 굽은 샤프트를 갖는 최소 침습 수술 기구 | |
| KR101126475B1 (ko) | 최소 침습 수술 도구 및 그 사용 방법 | |
| KR20130131276A (ko) | 개선된 관절부를 갖는 최소 침습 수술 기구 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20141014 Year of fee payment: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20150804 Year of fee payment: 5 |
|
| FPAY | Annual fee payment |
Payment date: 20161201 Year of fee payment: 6 |
|
| FPAY | Annual fee payment |
Payment date: 20181008 Year of fee payment: 8 |