KR101068123B1 - Two leg robot for amusement park - Google Patents
Two leg robot for amusement park Download PDFInfo
- Publication number
- KR101068123B1 KR101068123B1 KR1020080088925A KR20080088925A KR101068123B1 KR 101068123 B1 KR101068123 B1 KR 101068123B1 KR 1020080088925 A KR1020080088925 A KR 1020080088925A KR 20080088925 A KR20080088925 A KR 20080088925A KR 101068123 B1 KR101068123 B1 KR 101068123B1
- Authority
- KR
- South Korea
- Prior art keywords
- arm
- robot
- walking
- rickshaws
- crank arm
- Prior art date
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D57/00—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track
- B62D57/02—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/003—Manipulators for entertainment
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/06—Programme-controlled manipulators characterised by multi-articulated arms
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/01—Mobile robot
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Manipulator (AREA)
Abstract
본 발명은 이족보행 로봇에 관한 것으로 특히, 어린이들의 호기심을 자극하기 위해 노출도가 심한 공공장소 예를 들어 놀이공원등지에서 인력거와 같은 이송수단을 이끄는 놀이용 로봇을 제공하되 섬세한 제어의 필요성을 낮추기 위해 전신형이 아닌 하반신만 존재하도록 하고 인력거 등의 이송수단은 하반신의 허리부에 묶어 고정시킴으로써 보행만 가능하면 이송수단을 이끌 수 있도록 제작함으로써 호기심 유발의 동기를 지속적으로 제공할 수 있도록 하기 위한 놀이공원용 이족보행 하반신 로봇에 관한 것이다.The present invention relates to a biped walking robot, in particular, to provide a play robot for driving a transport means such as rickshaws in public places, for example, amusement parks, etc., where the exposure is intense to stimulate children's curiosity. To ensure that only the lower part of the body, not the whole body, exists and the transport means such as rickshaws are tied to the lower part of the lower part of the body so that the walking means can be led if possible, so as to provide a motivation for curiosity. It is about the bipedal lower body robot for park.
Description
본 발명은 이족보행 로봇에 관한 것으로 특히, 어린이들의 호기심을 자극하기 위해 노출도가 심한 공공장소 예를 들어 놀이공원등지에서 인력거와 같은 이송수단을 이끄는 놀이용 로봇을 제공하되 섬세한 제어의 필요성을 낮추기 위해 전신형이 아닌 하반신만 존재하도록 하고 인력거 등의 이송수단은 하반신의 허리부에 묶어 고정시킴으로써 보행만 가능하면 이송수단을 이끌 수 있도록 제작함으로써 호기심 유발의 동기를 지속적으로 제공할 수 있도록 하기 위한 놀이공원용 이족보행 하반신 로봇에 관한 것이다.The present invention relates to a biped walking robot, in particular, to provide a play robot for driving a transport means such as rickshaws in public places, for example, amusement parks, etc., where the exposure is intense to stimulate children's curiosity. To ensure that only the lower part of the body, not the whole body, exists and the transport means such as rickshaws are tied to the lower part of the lower part of the body so that the walking means can be led if possible, so as to provide a motivation for curiosity. It is about the bipedal lower body robot for park.
일반적으로, 전기적 또는 자기적인 작용을 사용하여 인간의 동작과 비슷한 운동을 행하는 기계장치를 「로봇」라고 한다. 로봇의 어원은, 슬라브어의 "R0B0TA(노예 기계)"에 유래한다고 일컬어진다. 우리나라에서 로봇이 보급되기 시작한 것은 1960년대 말부터이지만, 그 대부분은 공장에 있어서의 생산 작업의 자동화·무인화등을 목적으로 한 메니퓰레이터(manipulator)나 반송 로봇 등의 산업용 로봇(industrial robot)이었다.In general, a mechanical device that uses an electrical or magnetic action to perform a motion similar to human motion is called a "robot." The etymology of the robot is said to be derived from Slovak "R0B0TA (slave machine)". Robots began to spread in Korea in the late 1960s, but most of them were industrial robots, such as manipulators and transfer robots, for the purpose of automating and unmanning production operations in factories. .
최근에는, 인간이나 원숭이 등의 2발 직립 보행을 하는 동물의 신체 메카니즘이나 동작을 모방한 각식 이동 로봇에 관한 연구개발이 진전하여 실용화에 대한 기대도 높아지고 있다. 2발 직립에 의한 각식 이동은 계단을 오르거나 장애물을 넘는 등 유연한 주행 동작을 실현할 수 있다는 점에서 우수하다.In recent years, the research and development about the mobile robot that mimics the body mechanism and the motion of two-legged walking animals such as humans and monkeys has progressed, and the expectation for the practical use is also increasing. The angular movement by the two-headed upright is excellent in that it can realize a smooth running operation such as climbing stairs or overcoming obstacles.
각식 이동 로봇은 직립하는 5체 모두를 장비한 형태가 아니라, 요소 기술로서의 하지부분만에 의한 각식 이동에 관한 연구로부터 출발하였다는 역사적 경위가 있다.There is a historical point that the mobile robot is not equipped with all five standing uprights, but from the study of the mobile device based on the lower limbs as the element technology.
예를 들면, 일본 특개평3-184782호 공보에는 각식 보행 로봇 중 몸통으로부터 아래에 상당하는 구조체에 적용되는 관절 구조에 대하여 개시하고 있다.For example, Japanese Patent Laid-Open No. 3-184782 discloses a joint structure applied to a structure corresponding to the following from the trunk of a walking robot.
또한, 일본 특개평5-305579호 공보에는, 각식 이동 로봇의 보행 제어 장치에 대하여 개시하고 있다. 상기 공보에 기재된 보행 제어 장치는, ZMP(Zero Moment Point) 즉 보행할 때의 상반력(床反力)에 의한 모멘트가 제로가 되는 상면(床面)상의 점을 목표치에 일치시키도록 제어하는 것이다. 단, 도 1을 보더라도 알 수 있는 바와 같이, 상기 공보에 기재된 모멘트를 작용하는 몸통(24)은 블랙박스화 되어 있고, 5체 모두가 완성된 상태가 아니라 요소기술로서의 각식 이동의 제안에 머무른다.In addition, Japanese Unexamined Patent Application Publication No. H5-305579 discloses a walking control device for a mobile robot. The gait control device described in the above publication is to control a ZMP (Zero Moment Point), i.e., a point on the upper surface where the moment due to the normal reaction force when walking becomes zero to the target value. . However, as can be seen from FIG. 1, the body 24 acting on the moment described in the above publication is black boxed, and not all of the five bodies are completed, but remain in the proposal of etch movement as the element technology.
그러나, 각식 이동 로봇의 궁극적인 목적은 말할 필요도 없이 5체를 완비한 구조체의 완성이다. 즉, 2발 보행을 하는 하지(lower limb)와, 동체나 머리부, 팔 등으로 이루어지는 상지(upper limb)와, 이들 하지와 상지를 연결하는 몸통(trunk)으로 구성된 구조체로 2발에 의한 직립 보행을 하는 것에 있다. 5체가 완성된 로봇 은 2발을 사용한 직립·각식 이동 작업을 전제로 하고, 인간의 주거 공간에서 행하는 작업의 각 장면에서, 상지, 하지, 및 몸통을 소정의 우선 순위에 따라서 협조 동작하도록 제어할 필요가 있다.However, needless to say, the ultimate purpose of the angle mobile robot is the completion of a structure complete with five bodies. In other words, it is a two-legged upright structure consisting of a lower limb for walking on two feet, an upper limb composed of a body, a head, an arm, and the like, and a trunk connecting these lower legs with the upper limb. It is in walking. The robot, which has five bodies, is premised on the upright and angular movement task using two shots. There is a need.
특히, 인간의 메카니즘이나 동작을 에뮬레이트(emulate)한 각식 이동 로봇을 「인간형」, 또는 「인간형」의 로봇(humanoid robot)라고 부른다. 인간형 로봇은 예를 들면 생활 지원, 즉 주거 환경과 그 밖의 일상 생활상의 여러가지 장면에서 인적 활동의 지원 등을 행할 수 있다.In particular, an autonomous mobile robot that emulates a human mechanism or motion is called a "humanoid" or a "humanoid" robot. The humanoid robot can perform, for example, support for living, that is, support for human activity in various situations in a living environment and other daily life.
각식 이동 로봇은 종래와 같은 산업 목적인 것과 엔터테인먼트 목적인 것으로 대별할 수 있다.The mobile robot can be roughly classified into an industrial purpose and an entertainment purpose as in the prior art.
전자의 산업목적의 로봇은 산업 활동·생산 활동 등에 있어서의 각종의 어려운 작업을 인간 대신에 대행하는 것을 의도한다. 그 일예는, 원자력 발전 플랜트나 화력 발전 플랜트, 석유 화학 플랜트에서의 보수 작업, 제조 공장이나 고층 빌딩에 있어서와 같은 위험한 작업·어려운 작업의 대행이다. 이와 같은 종류의 로봇은 산업상의 특정한 용도 또는 기능을 실현하는 것이 설계·제작상의 지상 과제이며, 2발 보행을 전제로는 하지만, 인간이나 원숭이 등 직립 보행 동물이 원래 갖는 신체메카니즘이나 동작을 기계장치로서 반드시 충실하게 재현할 필요는 없다.The former robot for industrial purposes intends to act on behalf of humans for various difficult tasks in industrial activities and production activities. One example is a substitute for dangerous work and difficult work such as maintenance work in a nuclear power plant, a thermal power plant, a petrochemical plant, a manufacturing plant or a high-rise building. This kind of robot is a ground problem in designing and manufacturing to realize a specific use or function in the industry, and although it is premised on two-walking, it is a mechanical device for the physical mechanisms and motions originally owned by upright walking animals such as humans and monkeys. It does not necessarily need to be faithfully reproduced.
예를 들면, 특정 용도를 실현하기 위해서 손끝등 특정한 부위의 자유도나 동작 기능을 강화하는 한편, 용도에는 비교적 관계가 낮아지는 머리부나 허리부 등의 자유도를 제한하거나 또는 생략한다. 그 결과, 2발 보행이라고 하더라도 로봇의 작업이나 동작의 외관상에서 부자연함이 남는 경우가 있지만, 설계의 편의상, 이러한 점은 타협하지 않을 수 없다.For example, in order to realize a specific use, the degree of freedom and movement function of a specific part such as a fingertip are strengthened, while the degree of freedom such as a head or a waist that is relatively less related to the use is limited or omitted. As a result, even if it is two-foot walking, unnaturalness may remain in the appearance of the operation | movement and operation of a robot, but for convenience of design, such a point is inevitably compromised.
이것에 대하여, 후자의 엔터테인먼트 목적의 각식 이동 로봇은 어려운 작업을 대행한다는 생활 지원이라고 하기보다도 생활 그 자체에 밀착한 성질을 가진다. 즉, 이와 같은 종류의 로봇은 인간이나 원숭이 등의 2발의 직립 보행을 하는 동물이 원래 갖는 메카니즘을 충실하게 재현하고, 그 자연스럽고 원활한 동작을 실현하는 것을 지상 목표로 한다. 또한, 엔터테인먼트·로봇은 인간이나 원숭이 등의 지성이 높은 직립 동물을 에뮬레이트하는 이상, 표현력이 풍부한 것이 바람직하다.On the other hand, the latter type mobile robot for entertainment purposes has a close nature to life itself rather than life support for performing difficult tasks. That is, this kind of robot aims at faithfully reproducing the mechanism originally possessed by two upright walking animals such as humans and monkeys, and realizing its natural and smooth motion. In addition, the entertainment robot is preferably rich in expressive power as long as it emulates a highly intelligent erect animal such as a human being or a monkey.
이 의미에서, 인간을 모방한 엔터테인먼트·로봇이야말로 「인간형 로봇」라고 부르는 것에 상응한다. 결국, 전적으로 각식 이동 로봇라고 하더라도, 엔터테인먼트 목적의 로봇은 산업 목적 로봇과는 요소 기술을 공유하는 반면, 궁극 목표나 이것을 실현하는 하드웨어·메카니즘, 동작의 제어 방법은 전혀 다르다해도 과언이 아니다.In this sense, an entertainment robot that mimics a human being corresponds to what is called a "human robot." After all, even if it is a fully mobile robot, entertainment robots share element technology with industrial robots, while the ultimate goal, the hardware mechanism for realizing this, and the method of controlling motion are completely different.
이미 주지한 바와 같이, 인체는 수백의 관절 즉 수백에 이르는 자유도를 구비하고 있다. 끝없이 인간과 가까운 동작을 각식 이동 로봇에 부여하기 위해서는 거의 같은 자유도를 부여하는 것이 바람직하지만, 이것은 기술적으로는 극히 곤란하다.As is well known, the human body has hundreds of joints, or hundreds of degrees of freedom. It is desirable to give almost the same degree of freedom in order to endlessly move the human robot to the robot, but this is extremely difficult in technical terms.
더욱이 로봇은 기본적으로 산업적인 로봇이외에는 전술한 엔터테인먼드 용으로 크게 구분되지만, 2족 보행이 가능한 엔터테인먼드 용 로봇의 경우보다 많은 기회에 어린이들에게 노출이 되어야 어린이들의 호기심을 자극하고 미래 선진산업의 역군으로 성장할 수 잇을 것이나, 실제 전술한 어려움들로 인해 보급이 어렵고 제 어에 상당한 노력이 필요하기 때문에 전시회나 연구소 등 극히 노출이 자제되는 성향을 갖는 문제점이 있었다.Moreover, robots are basically divided into the above-mentioned entertainment robots other than industrial robots, but they should be exposed to children at more opportunities than those of the robots for biped walking. It would be able to grow as a reverse army, but due to the difficulties mentioned above, it was difficult to disseminate and required considerable effort to control, so there was a problem of being extremely exposed to exhibitions and research institutes.
상술한 문제점을 해소하기 위한 본 발명의 목적은 이족보행 로봇에 관한 것으로 특히, 어린이들의 호기심을 자극하기 위해 노출도가 심한 공공장소 예를 들어 놀이공원등지에서 인력거와 같은 이송수단을 이끄는 놀이용 로봇을 제공하되 섬세한 제어의 필요성을 낮추기 위해 전신형이 아닌 하반신만 존재하도록 하고 인력거 등의 이송수단은 하반신의 허리부에 묶어 고정시킴으로써 보행만 가능하면 이송수단을 이끌 수 있도록 제작함으로써 호기심 유발의 동기를 지속적으로 제공할 수 있도록 하기 위한 놀이공원용 이족보행 하반신 로봇을 제공하는 데 있다.An object of the present invention for solving the above problems relates to a bipedal walking robot, in particular, a play robot for driving a transport means such as rickshaws in public places, for example, amusement parks with high exposure to stimulate children's curiosity In order to reduce the need for delicate control, only the lower body, not the whole body, exists and the means of transportation such as rickshaws are tied to the lower part of the lower body to fix the pedestrian's motivation by making it possible to walk. It is to provide a bipedal lower body robot for amusement parks to continue to provide.
상기와 같은 목적을 달성하기 위한 본 발명에 따른 놀이공원용 이족보행 하반신 로봇의 특징은, 전기모터가 안착되는 베이스와; 베이스의 일측에 제 1힌지로 연결되어 회동하는 한쌍의 상박과; 상기 상박에 각각 하나씩 대응되며 상박의 하단부에 제 2힌지로 연결되어 회동하는 하박부와; 상기 하박부의 하단부에 연직방향으로 일정 면적을 가지며 그 저면에 소정 두께를 갖는 고무 혹은 컨베이어밸트가 부착되어 미끄러짐이 방지되고 접하는 바닥면과의 마찰력을 제공하는 평판부와; 상기 전기모터의 회전에 따른 힘을 전달박아 회전수는 낮추고 토오크는 높여 출력하는 감속기와; 상기 감속기와 연결되어진 크랭크암과; 상기 크랭크암에 일측이 연결되고 상기 상박의 일측에 연결되어 상기 크랭크암의 회전각에 따라 상기 상박의 일측을 당기거나 밀어내는 상박로드암; 및 상기 크랭크암에 일측이 연결되고 상기 하박의 일측에 연결되어 상기 크랭크암의 회전각에 따라 상기 하박의 일측을 당기거나 밀어내는 하박로드암으로 구성되되; 상기 베이스의 일측에는 인력거 등의 이송수단이 연결될 수 있도록 구성되며, 인력거와 연결시 상하박으로 이루어진 한쌍의 다리와 인력거가 3발이를 이루어 로봇이 균형을 잡고 자체의 하중과 상박로드암과 하박로드암의 운동에 의해 상기 제 2힌지를 기준으로 상박과 하박이 접히거나 펼처지는 동작이 이루어져 사람이 걷는 듯하게 움직이는 데 있다.Features of the bipedal lower body robot for amusement park according to the present invention for achieving the above object, the base on which the electric motor is seated; A pair of upper arm pivots connected to one side of the base by a first hinge; A lower portion corresponding to each of the upper portions and connected to a lower end of the upper portion by a second hinge; A flat plate having a predetermined area in the vertical direction at the lower end of the lower thin portion and having a rubber or a conveyor belt having a predetermined thickness on the bottom thereof to prevent slippage and to provide frictional force with a contacting bottom surface; A reducer which transmits the force according to the rotation of the electric motor to lower the rotation speed and increase the torque; A crank arm connected to the reducer; An upper arm rod arm connected to one side of the crank arm and connected to one side of the upper arm to pull or push one side of the upper arm according to a rotation angle of the crank arm; And a lower arm rod arm connected to one side of the crank arm and connected to one side of the lower arm to pull or push one side of the lower arm according to the rotation angle of the crank arm; One side of the base is configured to be connected to the transfer means such as rickshaws, and when the rickshaw is connected to a pair of legs and rickshaws consisting of three upper and lower nights to balance the robot and its own load and upper arm and arm load The movement of the arm is folded or unfolded based on the second hinge based on the second hinge, so that the human body moves as if walking.
삭제delete
삭제delete
상술한 본 발명에 따른 특징으로 인해 기대되는 효과로는, 어린이들의 호기심을 자극하기 위해 노출도가 심한 공공장소 예를 들어 놀이공원등지에서 인력거와 같은 이송수단을 이끄는 놀이용 로봇을 제공하되 섬세한 제어의 필요성을 낮추기 위해 전신형이 아닌 하반신만 존재하도록 하고 인력거 등의 이송수단은 하반신의 허리부에 묶어 고정시킴으로써 보행만 가능하면 이송수단을 이끌 수 있도록 제작함으로써 호기심 유발의 동기를 지속적으로 제공할 수 있다.Advantageous effects due to the above-described features of the present invention, while providing a play robot for leading the transport means such as rickshaws in public places, for example, amusement parks, etc., where the exposure is severe to stimulate children's curiosity In order to reduce the necessity of the system, only the lower part of the body, not the whole body type, and the means of transportation such as rickshaws are fixed to the lower part of the lower part of the body by making it possible to lead the means of transportation if only walking can provide a motivation to induce curiosity. have.
본 발명의 상술한 목적과 여러 가지 장점은 이 기술 분야에 숙련된 사람들에 의해, 첨부된 도면을 참조하여 후술되는 본 발명의 바람직한 실시 예로부터 더욱 명확하게 될 것이다.The above object and various advantages of the present invention will become more apparent from the preferred embodiments of the present invention described below with reference to the accompanying drawings by those skilled in the art.
이하, 본 발명의 바람직한 실시 예를 첨부한 도면을 참조하여 상세히 설명한다.Hereinafter, exemplary embodiments of the present invention will be described in detail with reference to the accompanying drawings.
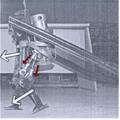
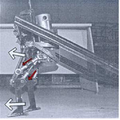
첨부한 도 1은 본 발명에 따른 놀이공원용 이족보행 하반신 로봇의 구성을 나타내는 측면 예시도이며, 도 2 내지 도 9는 본 발명에 따른 놀이공원용 이족보행 하반신 로봇의 보행동작에 따른 실린더와의 관계를 나타내는 사진 예시도이다. 이때 첨부한 도 2 내지 도 9에 도시되어진 사진 예시도에 표시되어진 화살표에 대해 살펴보면, 붉은색 화살표는 힘의 전달방향 즉 밀거나 당기는 힘의 방향을 나타내는 것이며, 흰색 화살표는 실제적인 움직임의 방향을 나타낸다. 또한 벡터량을 표시하는 것이다.1 is a side view illustrating a configuration of a biped lower body robot for amusement park according to the present invention, Figures 2 to 9 is a cylinder with a walking motion of the biped lower body robot for amusement park according to the present invention It is a photograph illustration showing a relationship. At this time, when looking at the arrows shown in the photographic example shown in Figures 2 to 9 attached, the red arrow indicates the direction of force transmission, that is, the direction of the pushing or pulling force, the white arrow indicates the direction of the actual movement Indicates. It also displays the vector amount.
첨부한 도 1을 참조하여 본 발명에 따른 놀이공원용 이족보행 하반신 로봇의 구성을 살펴보면, 모터(1)가 구동되면 감속기(2)로 힘이 전달되고, 감속기축(3)과 연결된 크랭크암(4)이 회전하면 길이가 서로 다른 상박로드암(5)과 하박로드암(6)이 로봇의 다리를 구성하는 상박(9)과 하박(10)을 밀어주거나 당겨줌으로써 사람이 걷는 것과 아주 유사한 걸음으로 걷게 되는 것이다.Referring to the configuration of the bipedal lower body robot for amusement park according to the present invention with reference to the accompanying Figure 1, when the motor (1) is driven a force is transmitted to the reducer (2), the crank arm connected to the reducer shaft ( 4) When the upper and lower arm rods (5) and the lower arm rods (6) of different lengths rotate, the steps are very similar to those of a person walking by pushing or pulling the upper and lower arms (9) and the lower and lower teeth (10) constituting the robot's legs. Will walk.
걸음을 걸을 때 미그러지는 것을 방지하기 위해 컨베이어밸트(11)를 로봇의 발바닥에 부착시켜 놓았으며, 참조번호 7과 8로 지칭되는 관절기능을 하는 힌지에는 각각 2개의 볼베어링이 들어가 있으며, 참조번호 13으로 치칭되는 홈은 인력거등의 이송수단을 연결하는 부분이며, 참조번호 14로 지칭되는 부분은 인력거등의 연결시 핸들 등을 연결하기 위한 구성이며, 참조번호 12는 핸들이 임의의 기준이하로 떨어지는 것을 방지하기 위한 걸림쇠를 칭하는 것이다.Conveyor belt 11 is attached to the sole of the robot to prevent slipping when walking, and two ball bearings are included in the hinges, which are referred to as reference numbers 7 and 8, respectively. 13 is a part connecting the transport means such as rickshaws, the part referred to as 14 is a configuration for connecting the handles, etc. when connecting the rickshaw,
또한, 참조번호 16은 상반신 부분에 대응하는 인형 등과 같은 조형물을 끼우기 위한 금속 봉이다.Further,
따라서 첨부한 도 2 내지 도 9에 도시되어 도면 중, 상박로드암(5)과 하박로드암(6)이 모두 당겨지는 경우는 도 2, 도 3, 도 9에 도시되어 있는 바와 같이, 상박(9)과 하박(10)이 무릎관절용 제 2힌지(8)를 기준으로 모두 후면으로 이동하되 상기 상박로드암(5)과 하박로드암(6)의 길이 차이에 의해 제 2힌지(8)를 기준으로 접히는 듯하게 된다.Therefore, when the upper and lower rod arm 5 and the
또한, 상박로드암(5)과 하박로드암(6)이 모두 밀어지는 경우는 도 5, 도 6, 도 7에 도시되어 있는 바와 같이, 상박(9)과 하박(10)이 무릎관절용 제 2힌지(8)를 기준으로 모두 전면으로 이동하되 상기 상박로드암(5)과 하박로드암(6)의 길이 차이에 의해 제 2힌지(8)를 기준으로 펴지 듯 하게 된다.In addition, when both the upper and
그 외 도 4에 도시되어 있는 경우와 도 8에 도시되어 있는 경우는 상박로드암(5)과 하박로드암(6)이 각각 따로 밀거나 당기는 경우로서 발을 내딛거나 접어올리는 과정에 해당한다.In addition, the case shown in FIG. 4 and the case shown in FIG. 8 correspond to a process of stepping up or folding the upper and
이를 통해 실질적으로 상기 상박(9)과 하박(10)으로 이루어진 2개의 발과 인력거에 연결되는 부분으로 이루어진 3발이가 형성된다. 3발이는 삼정(三鼎)이라고도 하며, 3발이의 특성상 하중이 3분되어 일측의 다리가 짧아지더라도 넘어지지 않고 짧아진 다리와 나머지 2개의 다리로 균형을 잡는다. 이를 힘의 삼정(三鼎)이라 칭하며, 본 발명에 따른 로봇 역시 로봇의 두 발과 인력거에 연결되는 부분이 실제적인 3발이로 작용하기 때문에 전체적인 균형을 잡을 수 있으며, 자체의 하중과 바닥면의 마찰력 및 상박로드암(5)과 하박로드암(6)의 운동에 의해 사람이 걷는 듯하게 움직이게 된다.Through this, three feet consisting of two feet consisting of the upper and
이러한 본 발명에 따른 놀이공원용 이족보행 하반신 로봇을 이용하여 인력거등에 연결시킨 사용예가 첨부한 도 10에 도시되어 있다.The use example connected to the rickshaw using the biped lower body robot for amusement park according to the present invention is shown in Figure 10 attached.
이상의 설명에서 본 발명은 특정의 실시 예와 관련하여 도시 및 설명하였지만, 특허청구범위에 의해 나타난 발명의 사상 및 영역으로부터 벗어나지 않는 한도 내에서 다양한 개조 및 변화가 가능하다는 것을 당 업계에서 통상의 지식을 가진 자라면 누구나 쉽게 알 수 있을 것이다.While the invention has been shown and described in connection with specific embodiments thereof, it is well known in the art that various modifications and changes can be made without departing from the spirit and scope of the invention as indicated by the claims. Anyone who owns it can easily find out.
도 1은 본 발명에 따른 놀이공원용 이족보행 하반신 로봇의 구성을 나타내는 측면 예시도1 is a side view illustrating the configuration of a biped lower body robot for amusement park according to the present invention
도 2 내지 도 9는 본 발명에 따른 놀이공원용 이족보행 하반신 로봇의 보행동작에 따른 실린더와의 관계를 나타내는 사진 예시도2 to 9 are photographic illustration showing the relationship with the cylinder according to the walking motion of the bipedal lower body robot for amusement park according to the present invention.
도 10은 본 발명에 따른 놀이공원용 이족보행 하반신 로봇을 이용한 사용예의 사진 예시도Figure 10 is a photographic example of the use example using a biped lower body robot for amusement park according to the present invention
Claims (3)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020080088925A KR101068123B1 (en) | 2008-09-09 | 2008-09-09 | Two leg robot for amusement park |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020080088925A KR101068123B1 (en) | 2008-09-09 | 2008-09-09 | Two leg robot for amusement park |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20100030131A KR20100030131A (en) | 2010-03-18 |
| KR101068123B1 true KR101068123B1 (en) | 2011-09-28 |
Family
ID=42180141
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020080088925A KR101068123B1 (en) | 2008-09-09 | 2008-09-09 | Two leg robot for amusement park |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101068123B1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150002133A (en) * | 2013-06-28 | 2015-01-07 | 대우조선해양 주식회사 | Knee joint of wearable robot |
| KR20190000976A (en) | 2017-06-26 | 2019-01-04 | 호서대학교 산학협력단 | The biped walking robot and the manufacturing method thereof |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105923065B (en) * | 2016-05-25 | 2018-07-31 | 华东理工大学 | Multi-mode drives mobile robot and its operation method |
| KR20190090588A (en) | 2018-01-25 | 2019-08-02 | 부산대학교 산학협력단 | Three-legged walking robot |
| KR20190090589A (en) | 2018-01-25 | 2019-08-02 | 부산대학교 산학협력단 | Three-legged walking robot |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20040075331A (en) * | 2001-12-25 | 2004-08-27 | 혼다 기켄 고교 가부시키가이샤 | Device for absorbing floor-landing shock for legged mobile robot |
| JP2004298997A (en) | 2003-03-31 | 2004-10-28 | Honda Motor Co Ltd | Leg type moving robot |
| KR20050038640A (en) * | 2002-08-28 | 2005-04-27 | 혼다 기켄 고교 가부시키가이샤 | Legged mobile robot |
| JP2006088258A (en) | 2004-09-22 | 2006-04-06 | Honda Motor Co Ltd | Leg joint assisting device of leg type mobile robot |
-
2008
- 2008-09-09 KR KR1020080088925A patent/KR101068123B1/en not_active IP Right Cessation
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20040075331A (en) * | 2001-12-25 | 2004-08-27 | 혼다 기켄 고교 가부시키가이샤 | Device for absorbing floor-landing shock for legged mobile robot |
| KR20050038640A (en) * | 2002-08-28 | 2005-04-27 | 혼다 기켄 고교 가부시키가이샤 | Legged mobile robot |
| JP2004298997A (en) | 2003-03-31 | 2004-10-28 | Honda Motor Co Ltd | Leg type moving robot |
| JP2006088258A (en) | 2004-09-22 | 2006-04-06 | Honda Motor Co Ltd | Leg joint assisting device of leg type mobile robot |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150002133A (en) * | 2013-06-28 | 2015-01-07 | 대우조선해양 주식회사 | Knee joint of wearable robot |
| KR102093307B1 (en) | 2013-06-28 | 2020-03-25 | 대우조선해양 주식회사 | Knee joint of wearable robot |
| KR20190000976A (en) | 2017-06-26 | 2019-01-04 | 호서대학교 산학협력단 | The biped walking robot and the manufacturing method thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20100030131A (en) | 2010-03-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100695355B1 (en) | Walking robot and motion control method thereof | |
| KR100937268B1 (en) | Legged mobile robot and method of controlling operation of the robot | |
| KR100746878B1 (en) | Leg mechanism of four-limbed robot having kinetic walking function | |
| Ott et al. | Development of a biped robot with torque controlled joints | |
| KR101068123B1 (en) | Two leg robot for amusement park | |
| JP2001150371A (en) | Robot and revolute joint device for robot | |
| Wang et al. | Crawling gait realization of the mini-modular climbing caterpillar robot | |
| JP5373880B2 (en) | Legged robot | |
| CN109606499B (en) | Miniature six-leg robot | |
| KR101267349B1 (en) | walking robot for toy | |
| JP4475708B2 (en) | Legged mobile robot and its motion control method | |
| JP2003080476A (en) | Legged moving robot and movable leg for the robot | |
| JP2001198864A (en) | Leg type robot and movement control method for leg type robot | |
| JP2002103253A (en) | Leg type moving robot and mounting structure of leg part | |
| JP2001246584A (en) | Leg type mobile robot | |
| KR100909457B1 (en) | Modular walking robot leg with variable degrees of freedom | |
| Kumar et al. | Design and fabrication of bipedal robot | |
| JP4770990B2 (en) | Legged mobile robot and control method thereof | |
| JP2001157972A (en) | Leg type moving robot | |
| Omer et al. | Semi-passive dynamic walking for biped walking robot using controllable joint stiffness based on dynamic simulation | |
| Geonea et al. | Design and simulation of a mechanism for human leg motion assistance | |
| Zhang et al. | Legged walking robots: design concepts and functional particularities | |
| Yadav et al. | Design and development of a structurally stable quadruped robot for surveillance | |
| Marco et al. | A new leg design with parallel mechanism architecture | |
| Hongbin et al. | Mechanical Design of Dexterous Bionic Leg with Single-DOF Planar Linkage |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application | ||
| J201 | Request for trial against refusal decision | ||
| AMND | Amendment | ||
| B701 | Decision to grant | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20141020 Year of fee payment: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20151016 Year of fee payment: 5 |
|
| FPAY | Annual fee payment |
Payment date: 20160920 Year of fee payment: 6 |
|
| FPAY | Annual fee payment |
Payment date: 20171116 Year of fee payment: 7 |
|
| LAPS | Lapse due to unpaid annual fee |