JP7329125B2 - 移動ロボット及びその制御方法 - Google Patents
移動ロボット及びその制御方法 Download PDFInfo
- Publication number
- JP7329125B2 JP7329125B2 JP2022500039A JP2022500039A JP7329125B2 JP 7329125 B2 JP7329125 B2 JP 7329125B2 JP 2022500039 A JP2022500039 A JP 2022500039A JP 2022500039 A JP2022500039 A JP 2022500039A JP 7329125 B2 JP7329125 B2 JP 7329125B2
- Authority
- JP
- Japan
- Prior art keywords
- mobile robot
- node
- movement
- open
- directions
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 38
- 230000033001 locomotion Effects 0.000 claims description 212
- 238000013507 mapping Methods 0.000 claims description 2
- 230000006870 function Effects 0.000 description 24
- 238000003860 storage Methods 0.000 description 21
- 239000000428 dust Substances 0.000 description 17
- 238000013528 artificial neural network Methods 0.000 description 14
- 239000010410 layer Substances 0.000 description 13
- 238000004140 cleaning Methods 0.000 description 12
- 238000004891 communication Methods 0.000 description 7
- 238000010586 diagram Methods 0.000 description 7
- 230000001133 acceleration Effects 0.000 description 6
- 238000012986 modification Methods 0.000 description 6
- 230000004048 modification Effects 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 238000010801 machine learning Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 239000000284 extract Substances 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 238000012549 training Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 230000005236 sound signal Effects 0.000 description 3
- 238000013473 artificial intelligence Methods 0.000 description 2
- 230000001680 brushing effect Effects 0.000 description 2
- 238000013527 convolutional neural network Methods 0.000 description 2
- 238000013135 deep learning Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 239000011229 interlayer Substances 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 238000003032 molecular docking Methods 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000000306 recurrent effect Effects 0.000 description 1
- 238000002187 spin decoupling employing ultra-broadband-inversion sequences generated via simulated annealing Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
Images





















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0238—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors
- G05D1/024—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors in combination with a laser
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/008—Manipulators for service tasks
- B25J11/0085—Cleaning
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0217—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with energy consumption, time reduction or distance reduction criteria
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
- B25J19/022—Optical sensing devices using lasers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
- B25J19/023—Optical sensing devices including video camera means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0003—Home robots, i.e. small robots for domestic use
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
- B25J9/161—Hardware, e.g. neural networks, fuzzy logic, interfaces, processor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1664—Programme controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
- G01C21/30—Map- or contour-matching
- G01C21/32—Structuring or formatting of map data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
- G05D1/0248—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means in combination with a laser
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Electromagnetism (AREA)
- Multimedia (AREA)
- Optics & Photonics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Artificial Intelligence (AREA)
- Fuzzy Systems (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- Evolutionary Computation (AREA)
- Human Computer Interaction (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Electric Vacuum Cleaner (AREA)
Description



Claims (16)
- 移動ロボットにおいて、
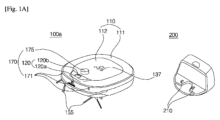
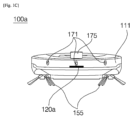
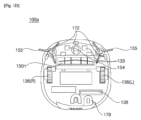
前記移動ロボットの本体を移動させるように構成された駆動ホイールと、
前記本体の外部の地形に対するセンシングデータを取得するように構成されたライダーセンサと、
少なくとも一つのノードに対するノードデータを保存するように構成されたメモリーと、
コントローラであって、
前記ライダーセンサの前記センシングデータ、及び前記ノードデータに基づいて、前記本体からの複数の移動方向のうち、少なくとも一つのオープンな移動方向が存在するかどうかを判断し、
前記少なくとも一つのオープンな移動方向が存在する場合、前記ノードデータ内に、前記移動ロボットの現在位置に対応する新しいノードを生成し、
前記駆動ホイールが前記本体を移動させる走行方向として、前記少なくとも一つのオープンな移動方向の一つを選択し、
前記少なくとも一つのオープンな移動方向が存在しない場合、前記ノードデータに基づいて、前記少なくとも一つのノードのうち、アップデートされる一つ以上のノードが存在するかどうかを決め、
アップデートされる前記一つ以上のノードが存在する場合、前記本体がアップデートされる前記ノードの一つに移動するように前記駆動ホイールを制御し、
アップデートされる前記一つ以上のノードが存在しない場合、前記ノードデータに基づいて、前記少なくとも一つのノードを含むマップの生成を完了する、ように構成された、コントローラと、を含み、
前記オープンな移動方向は、前記移動ロボットが走行可能で、前記移動ロボットが以前に走行していない方向であり、
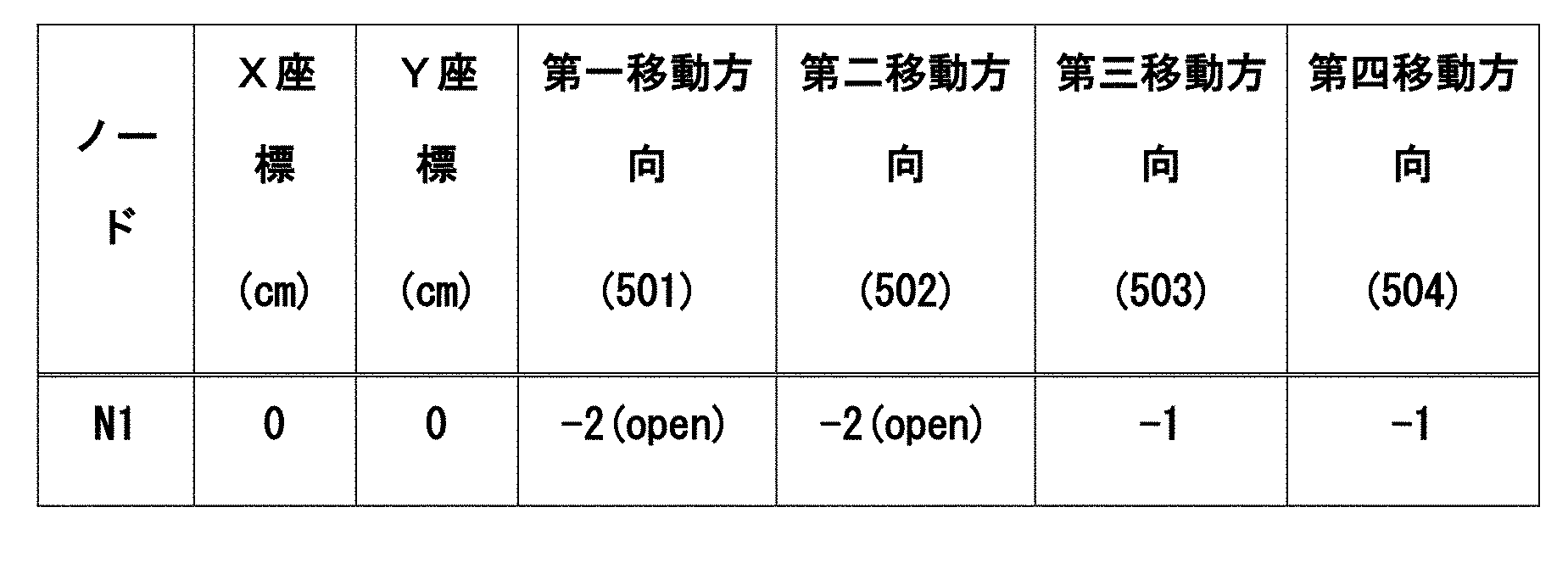
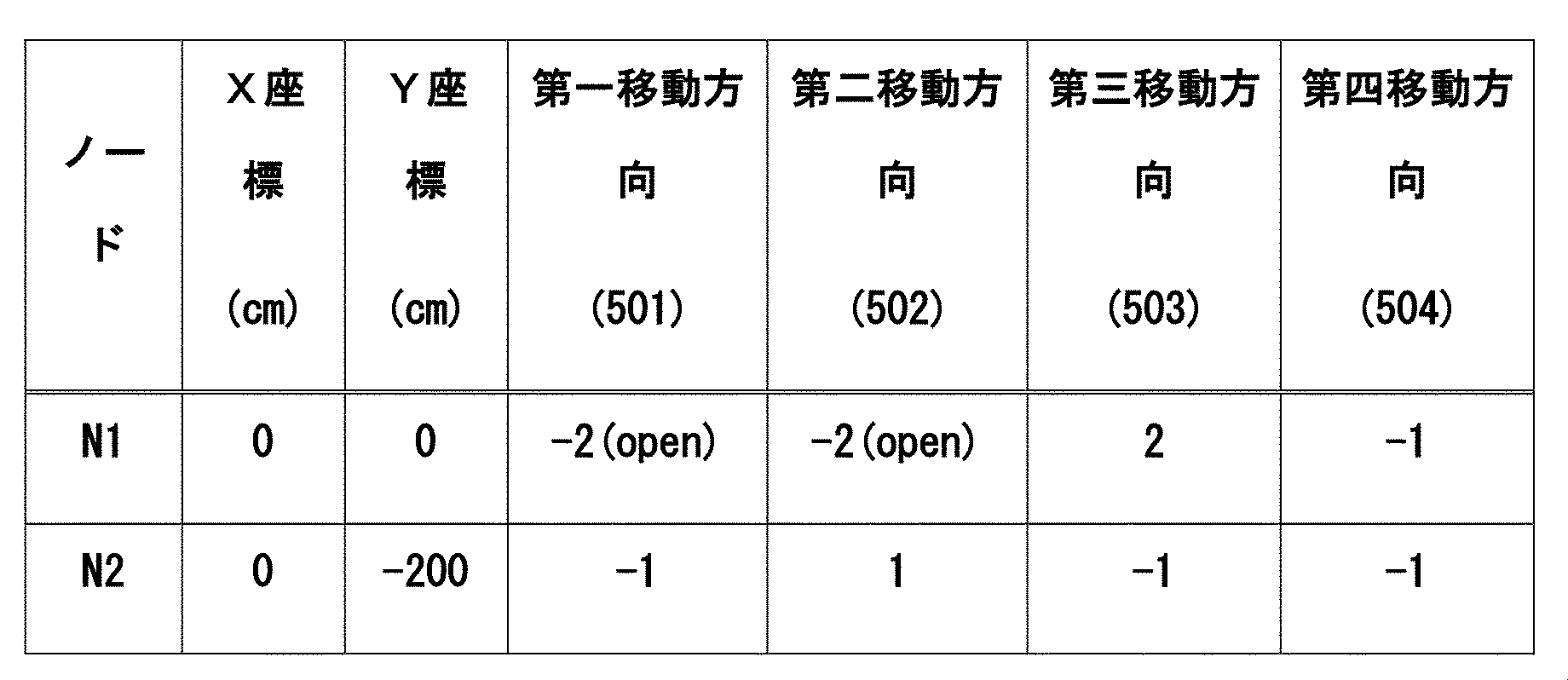
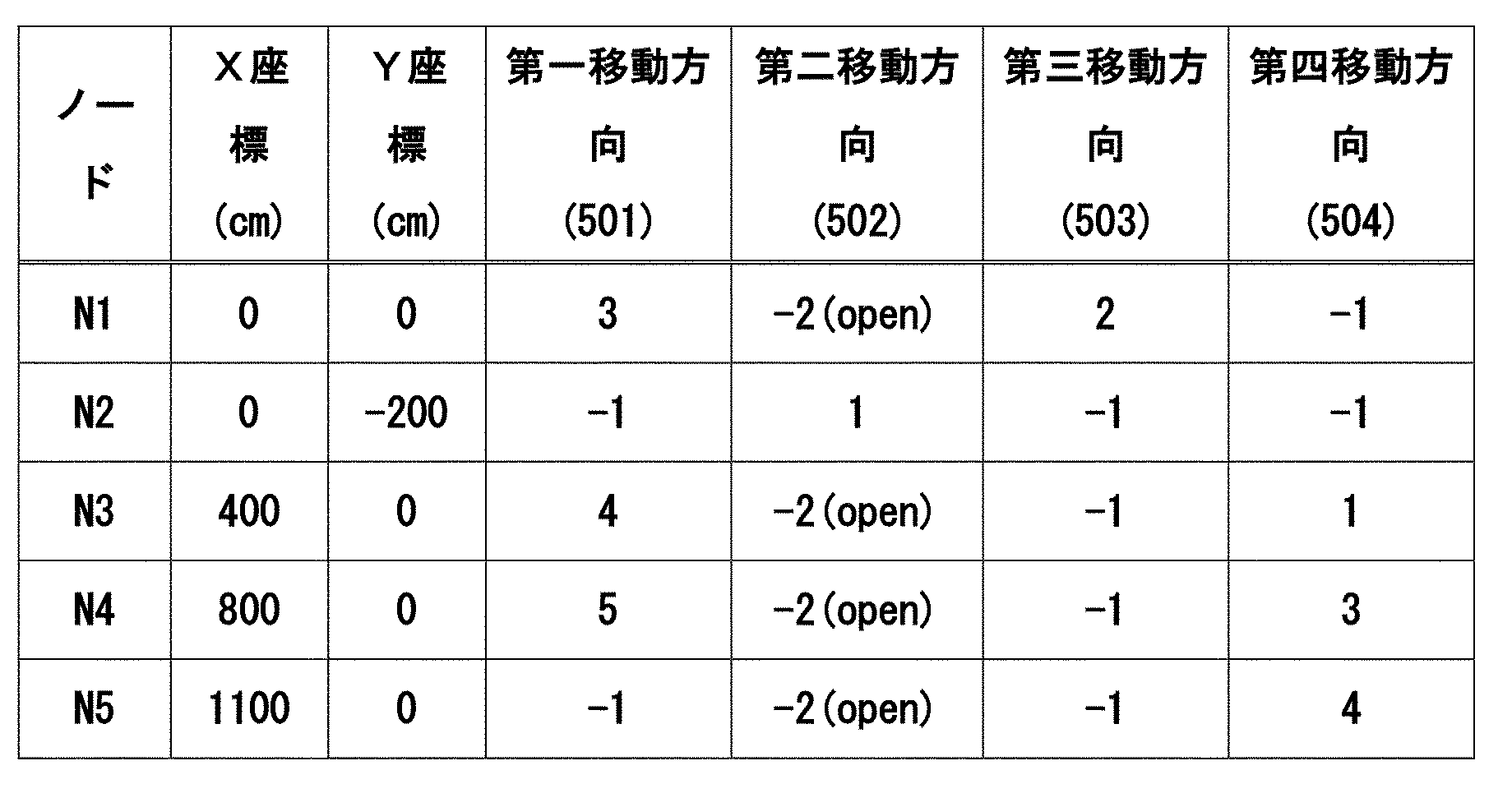
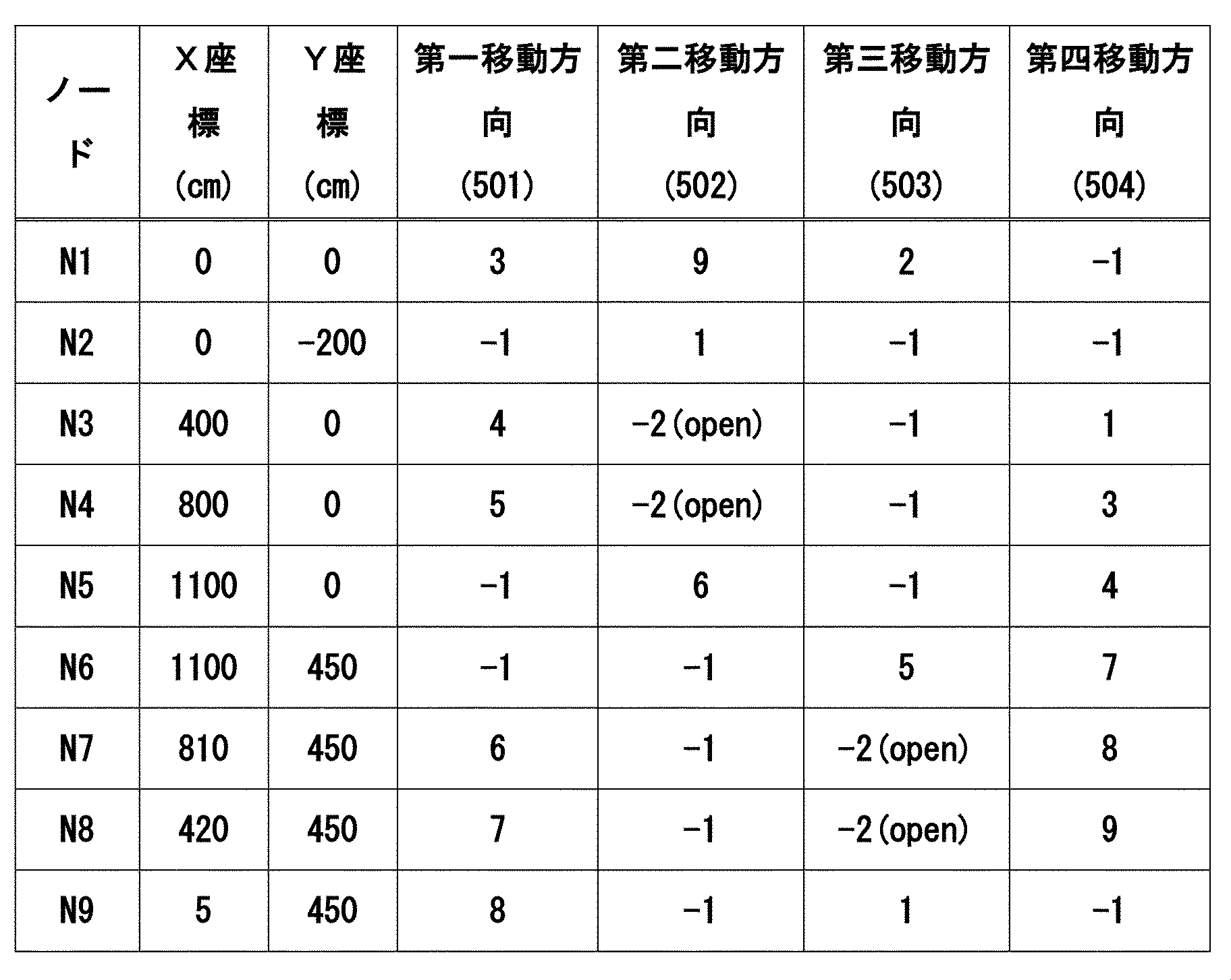
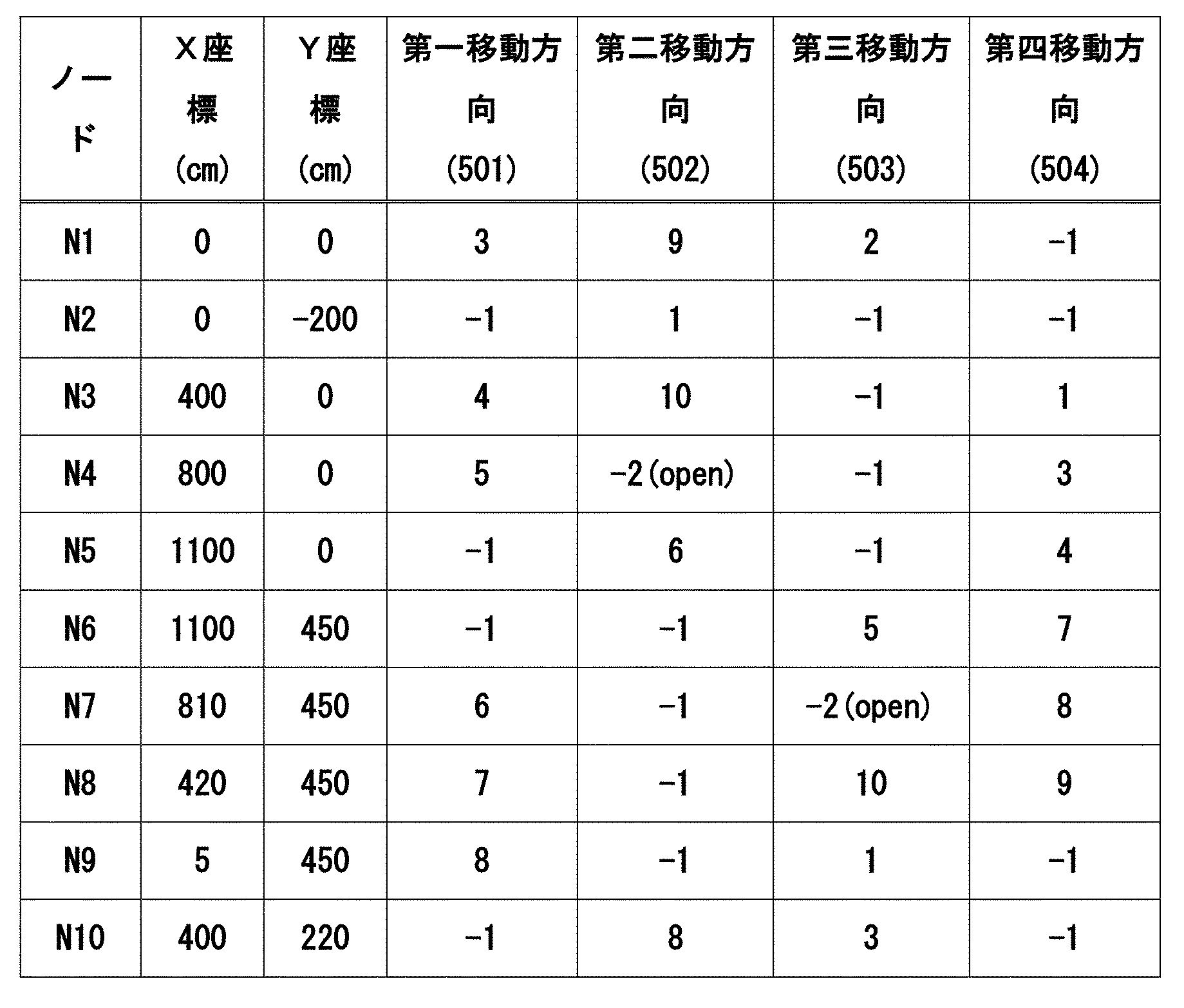
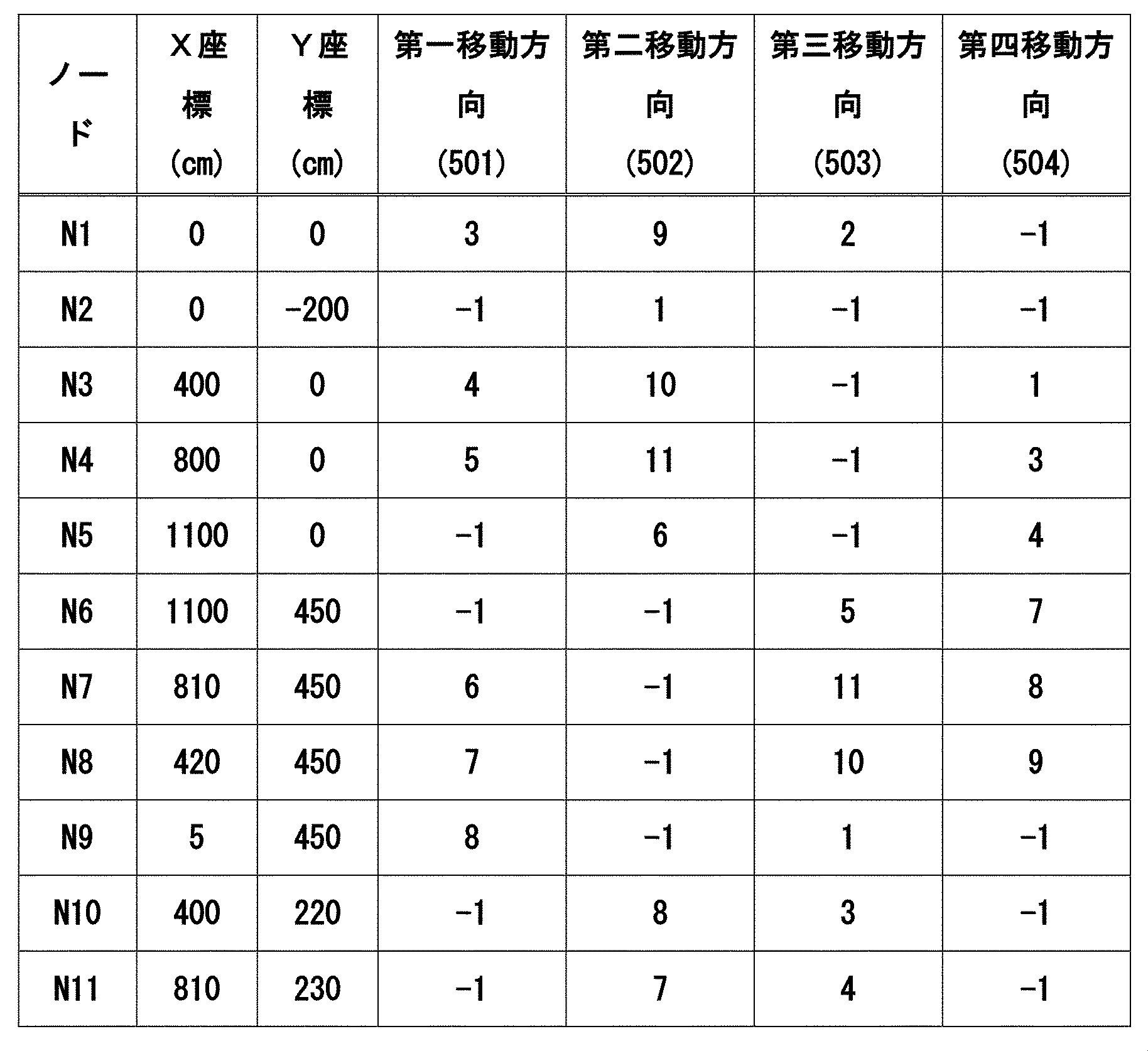
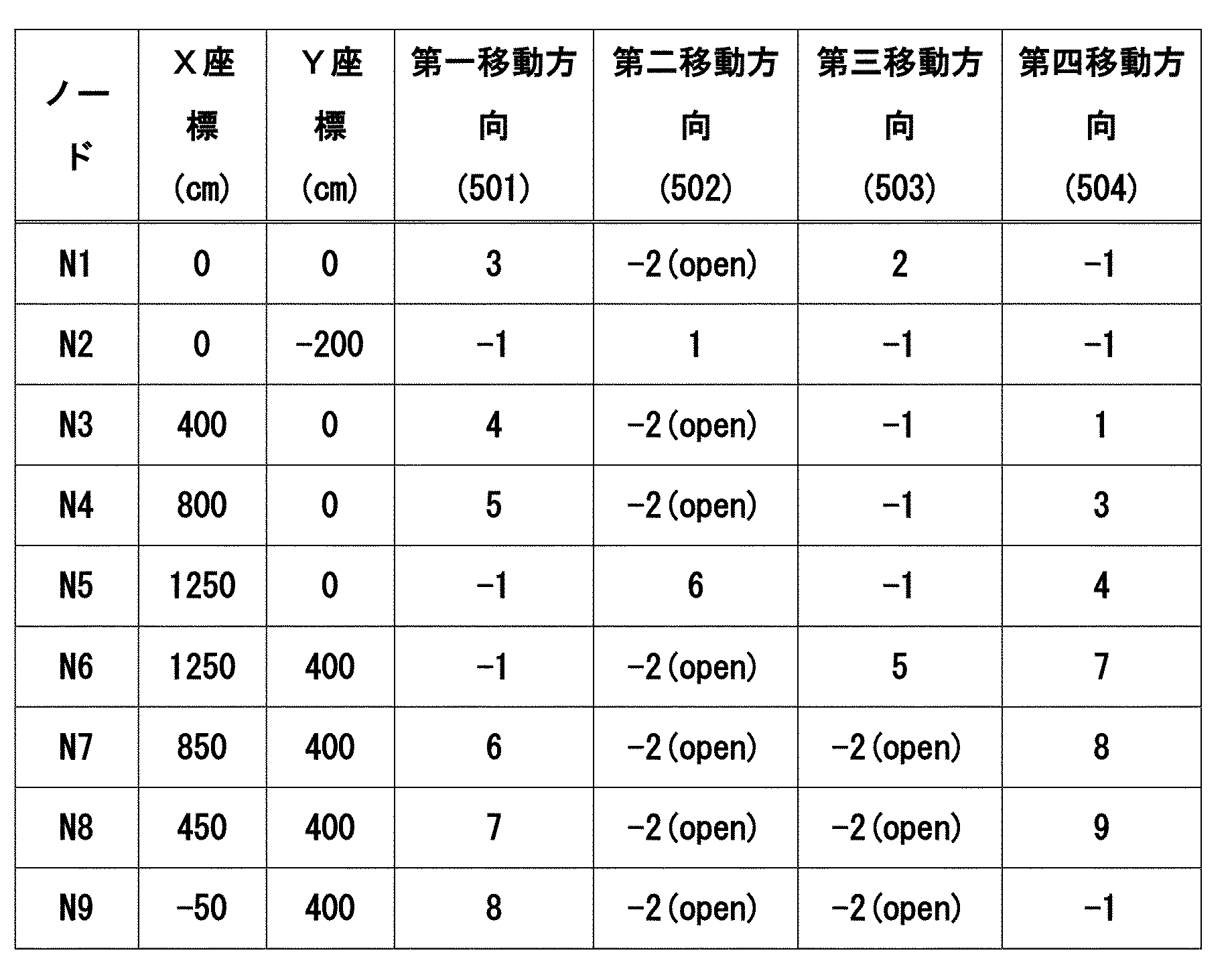
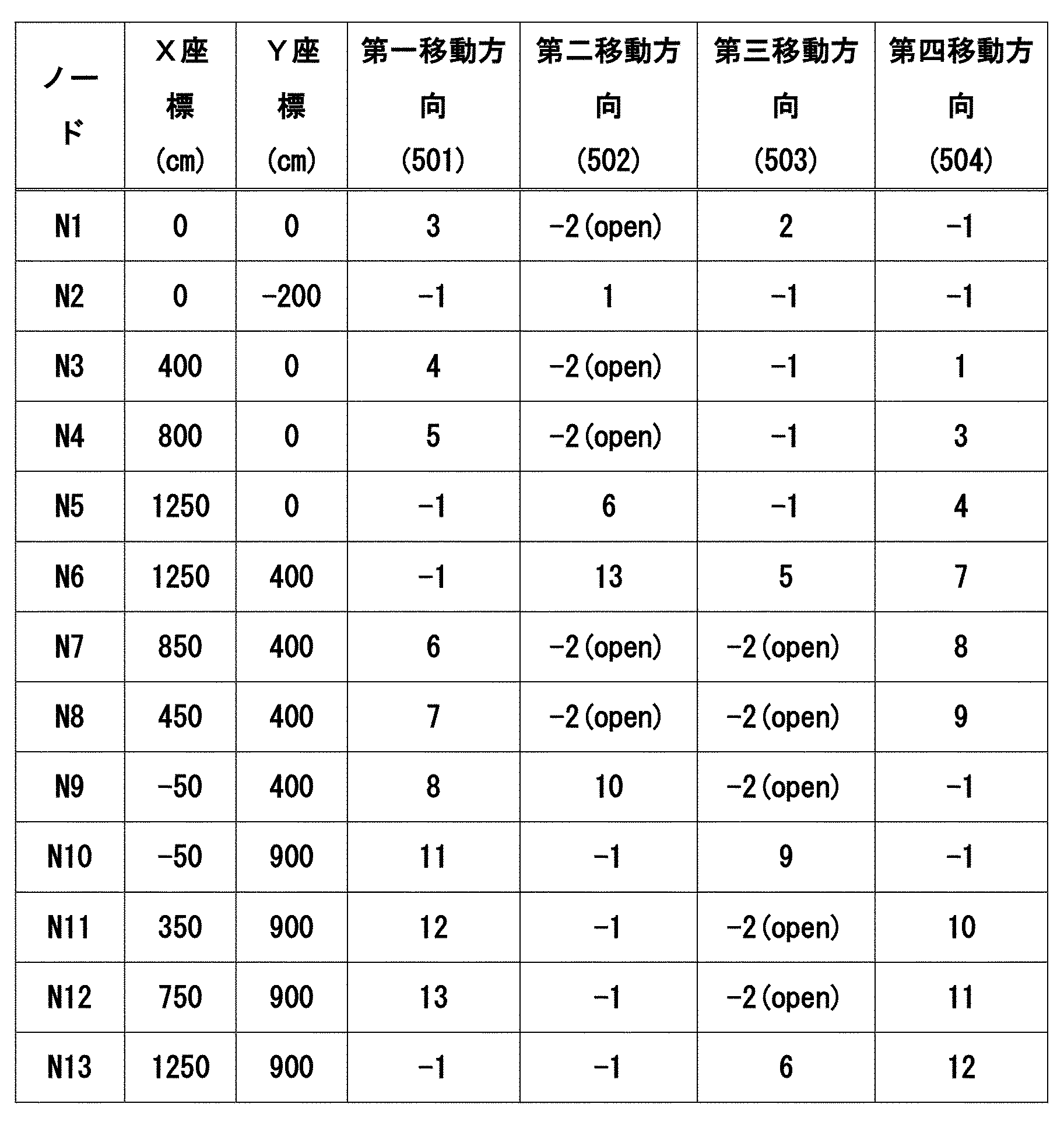
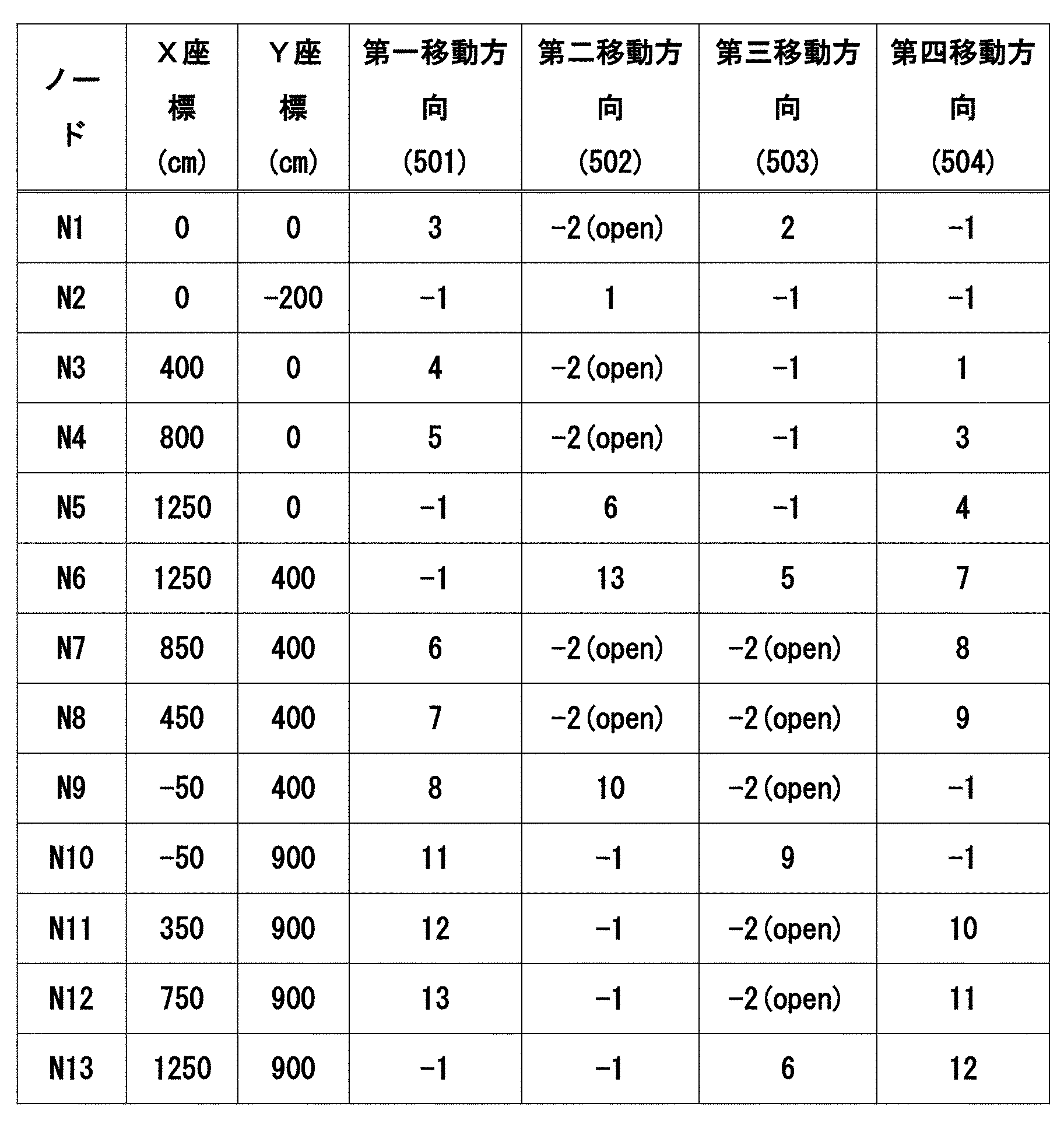
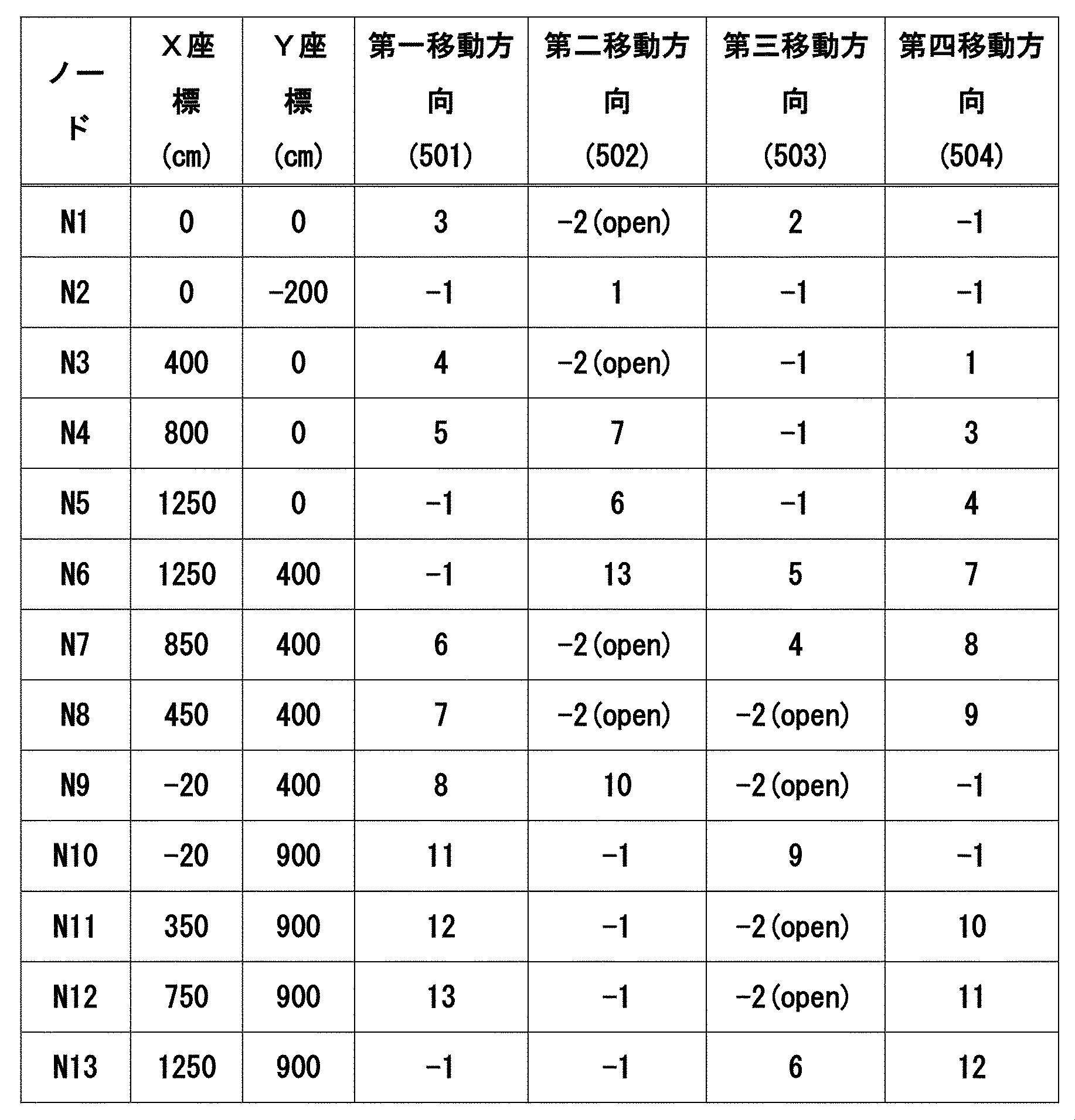
前記ノードデータは、前記少なくとも一つのノードのそれぞれに関して、座標、及び前記複数の移動方向のそれぞれに対するデータ値を含み、
前記データ値は、前記オープンな移動方向を示す第1データ値、前記移動ロボットが前記ノードから走行できないことを示す第2データ値、又は、前記少なくとも一つのノードのうちの他のノードを示す第3データ値の一つに設定され、
アップデートされる前記一つ以上のノードのそれぞれの前記データ値は、前記第1データ値に設定される、移動ロボット。 - 前記コントローラは、
前記移動ロボットが走行することができる前記複数の移動方向の第1サブセットを決め、
前記移動ロボットが以前に走行していない前記複数の移動方向の第2サブセットを決め、
前記第1サブセット及び前記第2サブセットに含まれた前記複数の移動方向の少なくとも一つを、前記少なくとも一つのオープンな移動方向として決める、ように構成される、請求項1に記載の移動ロボット。 - 前記コントローラは、
前記少なくとも一つのオープンな移動方向が前記複数の移動方向の中に含まれる場合、前記移動方向が、前記移動ロボットの前記走行方向に既に設定されているかどうか、及び前記オープンな移動方向に対応するかどうかを決め、
前記走行方向に既に設定された前記移動方向が前記オープンな移動方向に対応しない場合、前記新しいノードを生成する、ように構成される、請求項1に記載の移動ロボット。 - 前記コントローラは、
前記複数の移動方向のうち前記走行方向に既に設定された前記一つの移動方向のみが前記オープンな移動方向に対応するかどうかを決め、
前記走行方向に既に設定された前記移動方向のみが前記オープンな移動方向に対応する場合、前記新しいノードを生成せず、前記移動ロボットが前記走行方向に既に設定された前記移動方向に移動するように、前記駆動ホイールを制御し、
前記走行方向に既に設定された前記移動方向を含む前記移動方向の二つ以上が前記オープンな移動方向に対応する場合、前記新しいノードを生成する、ように構成される、請求項3に記載の移動ロボット。 - 前記コントローラは、前記新しいノードを生成する場合に、前記ノードデータに含まれた前記少なくとも一つのノードのそれぞれの前記複数の移動方向に対する前記データ値をアップデートするように構成される、請求項4に記載の移動ロボット。
- 前記コントローラは、前記複数の移動方向のそれぞれに対する前記データ値の少なくとも一つに関して、前記オープンな移動方向を示す前記第1データ値として設定されたノードを、アップデートされるノードとして決めるように構成される、請求項5に記載の移動ロボット。
- 前記コントローラは、
前記ノードデータに基づいて、アップデートされる前記一つ以上のノードのうち、前記移動ロボットの現在位置から最短距離に位置するノードを決め、
前記移動ロボットが、アップデートされる前記ノードのうち、前記移動ロボットの前記現在位置から前記最短距離に位置する前記ノードに移動するように、前記駆動ホイールを制御する、ように構成される、請求項6に記載の移動ロボット。 - 前記本体の外部の画像を取得するように構成された少なくとも一つのカメラをさらに含み、
前記コントローラは、前記画像から特徴を抽出し、前記抽出された特徴を前記マップにマッピングし、前記マップにマッピングされた前記特徴に基づいて前記移動ロボットの位置を決める、ように構成される、請求項7に記載の移動ロボット。 - 移動ロボットを制御する方法において、
前記移動ロボットの現在位置に関する複数の移動方向のうち少なくとも一つのオープンな移動方向が含まれるかどうかを決めるステップと、
前記複数の移動方向のうち、前記少なくとも一つのオープンな移動方向が含まれる場合、前記移動ロボットのメモリーに記憶されたノードデータに前記移動ロボットの前記現在位置に対応する新しいノードを生成し、前記少なくとも一つのオープンな移動方向の一つを前記移動ロボットが走行する走行方向として選択するステップと、
前記複数の移動方向の何れも前記移動ロボットの前記現在位置に関して前記オープンな移動方向でない場合、少なくとも一つのノードがアップデートされるかどうかを決め、少なくとも一つのノードがアップデートされる場合、前記移動ロボットがアップデートされる前記少なくとも一つのノードの一つに走行するように制御するステップと、
前記少なくとも一つのノードのいずれもアップデートされない場合、前記ノードデータに基づいてマップの生成を完了するステップと、を含み、
前記オープンな移動方向は、前記移動ロボットが走行可能で、前記移動ロボットが以前に走行していない方向であり、
前記ノードデータは、前記少なくとも一つのノードのそれぞれに関して、座標、及び前記複数の移動方向のそれぞれに対するデータ値を含み、
前記データ値は、前記オープンな移動方向を示す第1データ値、前記移動ロボットが前記ノードから走行できないことを示す第2データ値、又は、前記少なくとも一つのノードのうちの他のノードを示す第3データ値の一つに設定され、
アップデートされる前記一つ以上のノードのそれぞれの前記データ値は、前記第1データ値に設定される、方法。 - 複数の移動方向のうち少なくとも一つのオープンな移動方向が含まれるかどうかを決めるステップは、
前記移動ロボットが走行できるかどうかを、前記複数の移動方向のそれぞれに関して決めるステップと、
前記移動ロボットが前記現在位置から前記複数の移動方向に沿って以前に走行したかどうかを決めるステップと、
前記複数の移動方向のうち、前記移動ロボットが走行することができ、前記移動ロボットがそれに沿って以前に走行していない前記移動方向の少なくとも一つを、前記オープンな移動方向として決めるステップと、を含む、請求項9に記載の方法。 - 新しいノードを生成するステップは、
前記少なくとも一つのオープンな移動方向が存在する場合、前記走行方向に既に設定された移動方向が前記一つのオープンな移動方向に対応するかどうかを決めるステップと、
前記走行方向に既に設定された前記移動方向が前記オープンな移動方向に対応しない場合、前記新しいノードを生成するステップと、を含む、請求項9に記載の方法。 - 前記新しいノードを生成するステップは、
前記複数の移動方向のうち、前記走行方向に既に設定された前記移動方向のみが前記オープンな移動方向に対応するかどうかを決めるステップと、
前記走行方向に既に設定された前記移動方向のみが前記オープンな移動方向に対応する場合、前記新しいノードを生成せず、前記走行方向に既に設定された前記移動方向に移動するステップと、
前記走行方向に既に設定された前記移動方向を含む前記移動方向の二つ以上が前記オープンな移動方向に対応する場合、前記新しいノードを生成するステップと、をさらに含む、請求項11に記載の方法。 - 前記新しいノードを生成するステップは、前記ノードデータに含まれる前記少なくとも一つのノードのそれぞれの前記複数の移動方向のそれぞれに対する前記データ値をアップデートするステップをさらに含む、請求項12に記載の方法。
- アップデートされる前記少なくとも一つのノードの一つを決めるステップは、前記複数の移動方向のそれぞれに対する前記データ値の少なくとも一つに関して、前記オープンな移動方向を示す前記第1データ値として設定されたノードを、アップデートされるノードとして決めるステップを含む、請求項13に記載の方法。
- アップデートされる前記ノードの一つに移動するステップは、
前記ノードデータに基づいて、アップデートされる一つ以上のノードのうち、前記移動ロボットの前記現在位置から最短距離に位置するノードを決めるステップと、
前記移動ロボットを、前記移動ロボットの前記現在位置から前記最短距離に位置する前記ノードに移動するように制御するステップと、を含む、請求項14に記載の方法。 - 前記移動ロボットの外部の領域の画像から特徴を抽出するステップと、
前記抽出された特徴を前記マップにマッピングするステップと、
前記マップにマッピングされた前記特徴に基づいて前記移動ロボットの位置を決めるステップと、をさらに含む、請求項15に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2019-0081458 | 2019-07-05 | ||
| KR1020190081458A KR102224637B1 (ko) | 2019-07-05 | 2019-07-05 | 이동 로봇 및 그 제어방법 |
| PCT/KR2020/008715 WO2021006553A1 (en) | 2019-07-05 | 2020-07-03 | Moving robot and control method thereof |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022541736A JP2022541736A (ja) | 2022-09-27 |
| JP7329125B2 true JP7329125B2 (ja) | 2023-08-17 |
Family
ID=74065211
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022500039A Active JP7329125B2 (ja) | 2019-07-05 | 2020-07-03 | 移動ロボット及びその制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11774976B2 (ja) |
| EP (1) | EP3993962A4 (ja) |
| JP (1) | JP7329125B2 (ja) |
| KR (1) | KR102224637B1 (ja) |
| WO (1) | WO2021006553A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102296908B1 (ko) * | 2019-03-19 | 2021-09-02 | 한국전자통신연구원 | 특징점 지도 관리방법 및 장치 |
| US12007785B2 (en) * | 2021-08-31 | 2024-06-11 | Samsung Electronics Co., Ltd. | Cleaning robot capable of obtaining map of indoor space and operating method thereof |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009515226A (ja) | 2005-12-09 | 2009-04-09 | 韓國電子通信研究院 | 人工標識と地域座標系を用いた移動ロボットの地図の作成方法及び移動方法 |
| JP2018067314A (ja) | 2016-10-21 | 2018-04-26 | ネイバー コーポレーションNAVER Corporation | 室内自律走行ロボットのための制御方法及びシステム |
Family Cites Families (81)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3528200B2 (ja) | 1993-05-24 | 2004-05-17 | 松下電器産業株式会社 | 自走式掃除機 |
| DE4408328C2 (de) | 1994-03-11 | 2002-09-26 | Siemens Ag | Verfahren zum Aufbau einer zellular strukturierten Umgebungskarte von einer selbstbeweglichen mobilen Einheit, welche sich mit Hilfe von auf Wellenreflexion basierenden Sensoren orientiert |
| DE4408329C2 (de) | 1994-03-11 | 1996-04-18 | Siemens Ag | Verfahren zum Aufbau einer zellular strukturierten Umgebungskarte von einer selbstbeweglichen mobilen Einheit, welche sich mit Hilfe von auf Wellenreflexion basierenden Sensoren orientiert |
| US5793934A (en) | 1994-06-22 | 1998-08-11 | Siemens Aktiengesellschaft | Method for the orientation, route planning and control of an autonomous mobile unit |
| KR20020010257A (ko) | 2000-07-28 | 2002-02-04 | 김인광 | 로봇 시스템에서의 자기위치 인식 장치 및 방법 |
| US6667592B2 (en) | 2001-08-13 | 2003-12-23 | Intellibot, L.L.C. | Mapped robot system |
| US6728608B2 (en) | 2002-08-23 | 2004-04-27 | Applied Perception, Inc. | System and method for the creation of a terrain density model |
| US7805220B2 (en) | 2003-03-14 | 2010-09-28 | Sharper Image Acquisition Llc | Robot vacuum with internal mapping system |
| US20040236468A1 (en) | 2003-03-14 | 2004-11-25 | Taylor Charles E. | Robot vacuum with remote control mode |
| US20050010331A1 (en) | 2003-03-14 | 2005-01-13 | Taylor Charles E. | Robot vacuum with floor type modes |
| US20050273967A1 (en) | 2004-03-11 | 2005-12-15 | Taylor Charles E | Robot vacuum with boundary cones |
| US20060020369A1 (en) | 2004-03-11 | 2006-01-26 | Taylor Charles E | Robot vacuum cleaner |
| KR100611328B1 (ko) | 2005-06-30 | 2006-08-11 | 고려대학교 산학협력단 | 세선화 기반 위상지도의 작성방법 및 그 장치, 이동로봇의탐사를 통한 세선화 기반 위상지도 작성방법 및 그 장치 |
| AU2006284577B2 (en) | 2005-09-02 | 2012-09-13 | Neato Robotics, Inc. | Multi-function robotic device |
| KR100715609B1 (ko) | 2006-01-13 | 2007-05-07 | 학교법인 포항공과대학교 | 가정환경에서의 이동로봇의 위상학적 지도형성 및 자율주행방법 |
| KR100791384B1 (ko) | 2006-07-05 | 2008-01-07 | 삼성전자주식회사 | 특징점을 이용한 영역 구분 방법 및 장치와 이를 이용한이동 청소 로봇 |
| CN102083352B (zh) | 2008-04-24 | 2014-10-15 | 艾罗伯特公司 | 用于机器人使能的移动产品的定位、位置控制和导航系统的应用 |
| KR101503903B1 (ko) | 2008-09-16 | 2015-03-19 | 삼성전자 주식회사 | 이동 로봇의 지도 구성 장치 및 방법 |
| KR101037379B1 (ko) | 2008-12-18 | 2011-05-27 | 한국과학기술연구원 | 거리센서로부터 얻은 주변환경의 거리정보를 바탕으로 한 이동로봇탐사시스템 및 이를 이용한 탐사방법 |
| KR101553654B1 (ko) | 2009-02-13 | 2015-10-01 | 삼성전자 주식회사 | 이동 로봇 및 이동 로봇의 이동 방법 |
| JP5212212B2 (ja) | 2009-03-25 | 2013-06-19 | 株式会社Ihi | 通路検出プログラム、通路検出装置及び方法 |
| US8428776B2 (en) | 2009-06-18 | 2013-04-23 | Michael Todd Letsky | Method for establishing a desired area of confinement for an autonomous robot and autonomous robot implementing a control system for executing the same |
| KR20110000848A (ko) | 2009-06-29 | 2011-01-06 | (주)실리콘화일 | 3차원 거리정보 및 영상 획득 장치 |
| US8948913B2 (en) | 2009-10-26 | 2015-02-03 | Electronics And Telecommunications Research Institute | Method and apparatus for navigating robot |
| CN104970741B (zh) | 2009-11-06 | 2017-08-29 | 艾罗伯特公司 | 用于通过自主型机器人完全覆盖表面的方法和系统 |
| JP5803054B2 (ja) | 2009-12-02 | 2015-11-04 | 村田機械株式会社 | 自律移動装置 |
| DE102010017689A1 (de) | 2010-07-01 | 2012-01-05 | Vorwerk & Co. Interholding Gmbh | Selbsttätig verfahrbares Gerät sowie Verfahren zur Orientierung eines solchen Gerätes |
| KR101750340B1 (ko) | 2010-11-03 | 2017-06-26 | 엘지전자 주식회사 | 로봇 청소기 및 이의 제어 방법 |
| KR101761313B1 (ko) | 2010-12-06 | 2017-07-25 | 삼성전자주식회사 | 로봇 및 로봇의 경로생성방법 |
| KR101242252B1 (ko) | 2011-02-10 | 2013-03-11 | 고려대학교 산학협력단 | 시맨틱 격자 지도 생성 방법 및 시맨틱 격자 지도를 활용한 시맨틱 격자 지도 기반 탐사 방법 |
| FR2977023B1 (fr) | 2011-06-24 | 2014-02-21 | Univ Angers | Generation de donnees de carte |
| US8798840B2 (en) | 2011-09-30 | 2014-08-05 | Irobot Corporation | Adaptive mapping with spatial summaries of sensor data |
| WO2013071190A1 (en) | 2011-11-11 | 2013-05-16 | Evolution Robotics, Inc. | Scaling vector field slam to large environments |
| KR101179075B1 (ko) | 2012-02-28 | 2012-09-03 | 국방과학연구소 | 자율로봇의 경로계획방법 및 이를 구비한 경로계획장치 |
| KR20130112507A (ko) * | 2012-04-04 | 2013-10-14 | 인하대학교 산학협력단 | S* 알고리즘을 이용한 이동로봇의 안전경로계획 수립방법 |
| BR112014032713A2 (pt) | 2012-06-27 | 2017-06-27 | Pentair Water Pool & Spa Inc | limpador de piscina com um método e sistema de telêmetro a laser |
| KR20140009737A (ko) | 2012-07-12 | 2014-01-23 | 한국과학기술원 | 하이브리드 맵 기반 로봇의 위치인식방법 |
| JP5886502B2 (ja) | 2012-12-20 | 2016-03-16 | トヨタ自動車株式会社 | 移動体制御装置、移動体制御方法及び制御プログラム |
| KR101427186B1 (ko) * | 2013-06-12 | 2014-08-07 | 건국대학교 산학협력단 | 미지환경에서 지능형 로봇의 이동경로 생성을 위한 영역탐색 및 매핑 장치 |
| JP5897517B2 (ja) | 2013-08-21 | 2016-03-30 | シャープ株式会社 | 自律移動体 |
| CN105792721B (zh) * | 2013-12-19 | 2020-07-21 | 伊莱克斯公司 | 以螺旋样式移动的带侧刷的机器人真空吸尘器 |
| US9436926B2 (en) | 2014-02-25 | 2016-09-06 | Savioke, Inc. | Entryway based authentication system |
| US10068373B2 (en) * | 2014-07-01 | 2018-09-04 | Samsung Electronics Co., Ltd. | Electronic device for providing map information |
| CN107000207B (zh) | 2014-09-24 | 2021-05-04 | 三星电子株式会社 | 清洁机器人和控制清洁机器人的方法 |
| US10488865B2 (en) | 2014-12-16 | 2019-11-26 | Al Incorporated | Methods and systems for robotic surface coverage |
| US9704043B2 (en) | 2014-12-16 | 2017-07-11 | Irobot Corporation | Systems and methods for capturing images and annotating the captured images with information |
| US11400595B2 (en) * | 2015-01-06 | 2022-08-02 | Nexus Robotics Llc | Robotic platform with area cleaning mode |
| US9630319B2 (en) * | 2015-03-18 | 2017-04-25 | Irobot Corporation | Localization and mapping using physical features |
| US20170028556A1 (en) | 2015-07-28 | 2017-02-02 | Harris Corporation | Path-optimized manipulator reversing controller |
| JP6705636B2 (ja) | 2015-10-14 | 2020-06-03 | 東芝ライフスタイル株式会社 | 電気掃除機 |
| JP6649743B2 (ja) | 2015-10-28 | 2020-02-19 | シャープ株式会社 | 一致性評価装置および一致性評価方法 |
| KR20170053351A (ko) | 2015-11-06 | 2017-05-16 | 삼성전자주식회사 | 청소 로봇 및 그 제어 방법 |
| DE102015119501A1 (de) | 2015-11-11 | 2017-05-11 | RobArt GmbH | Unterteilung von Karten für die Roboternavigation |
| DE102015119865B4 (de) | 2015-11-17 | 2023-12-21 | RobArt GmbH | Robotergestützte Bearbeitung einer Oberfläche mittels eines Roboters |
| CN205671994U (zh) | 2015-12-16 | 2016-11-09 | 小米科技有限责任公司 | 自动清洁设备 |
| DE102016102644A1 (de) | 2016-02-15 | 2017-08-17 | RobArt GmbH | Verfahren zur Steuerung eines autonomen mobilen Roboters |
| EP3439522B1 (en) * | 2016-04-08 | 2023-06-07 | A&K Robotics Inc. | Autoscrubber convertible between manual and autonomous operation |
| CN109640775B (zh) | 2016-08-31 | 2021-03-30 | 村田机械株式会社 | 自主行进式地板清洗机 |
| KR20180074537A (ko) | 2016-12-30 | 2018-07-03 | 엘지전자 주식회사 | 청소 로봇 |
| US10653282B2 (en) | 2016-12-23 | 2020-05-19 | Lg Electronics Inc. | Cleaning robot |
| KR20180082264A (ko) | 2017-01-10 | 2018-07-18 | 엘지전자 주식회사 | 이동 로봇 및 그 제어방법 |
| CN108318046B (zh) | 2017-01-18 | 2020-12-15 | 华为技术有限公司 | 路径规划方法和装置 |
| KR102012550B1 (ko) | 2017-02-20 | 2019-08-20 | 엘지전자 주식회사 | 돌발 장애물을 식별하는 방법 및 이를 구현하는 로봇 |
| US20180290748A1 (en) | 2017-04-03 | 2018-10-11 | Versatol, Llc | Autonomous in-tunnel intelligence, surveillance, and reconnaissance drone |
| US10222215B2 (en) * | 2017-04-21 | 2019-03-05 | X Development Llc | Methods and systems for map generation and alignment |
| US9939814B1 (en) * | 2017-05-01 | 2018-04-10 | Savioke, Inc. | Computer system and method for automated mapping by robots |
| JP7087290B2 (ja) | 2017-07-05 | 2022-06-21 | カシオ計算機株式会社 | 自律移動装置、自律移動方法及びプログラム |
| US10482619B2 (en) | 2017-07-27 | 2019-11-19 | AI Incorporated | Method and apparatus for combining data to construct a floor plan |
| US10583561B2 (en) | 2017-08-31 | 2020-03-10 | Neato Robotics, Inc. | Robotic virtual boundaries |
| US11579298B2 (en) * | 2017-09-20 | 2023-02-14 | Yujin Robot Co., Ltd. | Hybrid sensor and compact Lidar sensor |
| KR102219801B1 (ko) | 2017-09-22 | 2021-02-23 | 엘지전자 주식회사 | 인공지능을 이용한 이동 로봇 및 이동 로봇의 제어방법 |
| US10503172B2 (en) | 2017-10-18 | 2019-12-10 | Luminar Technologies, Inc. | Controlling an autonomous vehicle based on independent driving decisions |
| CN107806881A (zh) * | 2017-10-25 | 2018-03-16 | 上海思岚科技有限公司 | 移动机器人构建结构地图的方法与设备 |
| WO2019106429A2 (en) | 2017-11-28 | 2019-06-06 | Innoviz Technologies Ltd. | Lidar systems and methods |
| KR20190103511A (ko) | 2018-02-12 | 2019-09-05 | 엘지전자 주식회사 | 이동 로봇 및 그 제어방법 |
| US11237004B2 (en) | 2018-03-27 | 2022-02-01 | Uatc, Llc | Log trajectory estimation for globally consistent maps |
| KR102561263B1 (ko) * | 2018-04-04 | 2023-07-28 | 삼성전자주식회사 | 지도 데이터를 생성하는 전자 장치 및 그 동작 방법 |
| KR102466940B1 (ko) * | 2018-04-05 | 2022-11-14 | 한국전자통신연구원 | 로봇 주행용 위상 지도 생성 장치 및 방법 |
| DE102019202702B3 (de) * | 2019-02-28 | 2020-08-13 | Kuka Deutschland Gmbh | Abfahren einer vorgegebenen Anordnung von Wegen mit einem mobilen Roboter |
| KR102296908B1 (ko) * | 2019-03-19 | 2021-09-02 | 한국전자통신연구원 | 특징점 지도 관리방법 및 장치 |
| US11314254B2 (en) * | 2019-03-26 | 2022-04-26 | Intel Corporation | Methods and apparatus for dynamically routing robots based on exploratory on-board mapping |
-
2019
- 2019-07-05 KR KR1020190081458A patent/KR102224637B1/ko active IP Right Grant
-
2020
- 2020-07-03 JP JP2022500039A patent/JP7329125B2/ja active Active
- 2020-07-03 EP EP20837393.6A patent/EP3993962A4/en active Pending
- 2020-07-03 WO PCT/KR2020/008715 patent/WO2021006553A1/en unknown
- 2020-07-06 US US16/921,167 patent/US11774976B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009515226A (ja) | 2005-12-09 | 2009-04-09 | 韓國電子通信研究院 | 人工標識と地域座標系を用いた移動ロボットの地図の作成方法及び移動方法 |
| JP2018067314A (ja) | 2016-10-21 | 2018-04-26 | ネイバー コーポレーションNAVER Corporation | 室内自律走行ロボットのための制御方法及びシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20210005443A (ko) | 2021-01-14 |
| EP3993962A4 (en) | 2023-05-17 |
| JP2022541736A (ja) | 2022-09-27 |
| US20210004015A1 (en) | 2021-01-07 |
| EP3993962A1 (en) | 2022-05-11 |
| US11774976B2 (en) | 2023-10-03 |
| KR102224637B1 (ko) | 2021-03-08 |
| WO2021006553A1 (en) | 2021-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102302575B1 (ko) | 이동 로봇 및 그 제어방법 | |
| KR102275300B1 (ko) | 이동 로봇 및 그 제어방법 | |
| US11199852B2 (en) | Mobile robot and control method for controlling the same | |
| US20220257074A1 (en) | Mobile robot using artificial intelligence and controlling method thereof | |
| KR20180023301A (ko) | 이동 로봇 및 그 제어방법 | |
| KR20180023302A (ko) | 이동 로봇 및 그 제어방법 | |
| JP7329125B2 (ja) | 移動ロボット及びその制御方法 | |
| KR102147210B1 (ko) | 인공지능 이동 로봇의 제어 방법 | |
| EP4374763A1 (en) | Robotic cleaner and method for controlling robotic cleaner | |
| JP7432701B2 (ja) | 移動ロボット及びその制御方法 | |
| US20240377835A1 (en) | Robotic cleaner and method for controlling robotic cleaner | |
| KR102500525B1 (ko) | 이동 로봇 | |
| KR20230137080A (ko) | 이동 로봇 | |
| KR20230143800A (ko) | 이동 로봇 및 그의 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220302 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230420 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230711 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230804 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7329125 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |