JP7308498B2 - Plasma processing apparatus and plasma processing method - Google Patents
Plasma processing apparatus and plasma processing method Download PDFInfo
- Publication number
- JP7308498B2 JP7308498B2 JP2022123459A JP2022123459A JP7308498B2 JP 7308498 B2 JP7308498 B2 JP 7308498B2 JP 2022123459 A JP2022123459 A JP 2022123459A JP 2022123459 A JP2022123459 A JP 2022123459A JP 7308498 B2 JP7308498 B2 JP 7308498B2
- Authority
- JP
- Japan
- Prior art keywords
- upper electrode
- plasma processing
- dielectric plate
- processing apparatus
- dielectric
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Landscapes
- Plasma Technology (AREA)
Description
本開示の例示的実施形態は、プラズマ処理装置、及び、プラズマ処理方法に関するものである。 An exemplary embodiment of the present disclosure relates to a plasma processing apparatus and a plasma processing method.
プラズマ処理装置は、電子デバイスの製造に用いられる。特許文献1にはプラズマ処理装置に係る技術が開示される。プラズマ処理装置は、真空容器、処理室、支持電極、アンテナ及び放射口、磁場形成手段を備える。処理室は、真空容器内部に設けられ、ガスが供給される。支持電極は、処理室内に設けられ、処理対象物を支持する。アンテナ及び放射口は、超短波(VHF)帯又は極超短波(UHF)帯の高周波を処理室に供給する。磁場形成手段は、処理室に磁場を形成する。プラズマ処理装置は、電界制御空間を備える。電界制御空間は、誘電体と誘電体を囲む金属仕切板又はディスク状金属とによって構成される。なお、VHF帯とは、30~300[MHz]程度の範囲の周波数帯である。UHF帯とは、300[MHz]~3[GHz]程度の範囲の周波数帯である。
Plasma processing apparatuses are used in the manufacture of electronic devices.
本開示は、プラズマ励起周波数がVHF帯又はUHF帯の平行平板型のプラズマ処理装置において、プラズマの均一性を向上し得る技術を提供する。 The present disclosure provides a technique capable of improving plasma uniformity in a parallel plate type plasma processing apparatus with a plasma excitation frequency in the VHF band or UHF band.
例示的実施形態において、プラズマ処理装置が提供される。プラズマ処理装置は、処理容器、ステージ、誘電体板、上部電極、導波路、導波路の端部を備える。ステージは、処理容器内に設けられる。誘電体板は、ステージの上面の上方に処理容器内の空間を介して設けられる。上部電極は、誘電体板の上方に設けられる。導波路は、VHF帯又はUHF帯の高周波を導波する。導波路の端部は、空間に向いて配置され、空間に高周波を放射する。上部電極と誘電体板との間に空隙が設けられる。空隙の幅は、誘電体板の延びる方向において、非一様である。 In an exemplary embodiment, a plasma processing apparatus is provided. A plasma processing apparatus includes a processing container, a stage, a dielectric plate, an upper electrode, a waveguide, and an end portion of the waveguide. A stage is provided in the processing container. The dielectric plate is provided above the upper surface of the stage via a space inside the processing container. The upper electrode is provided above the dielectric plate. The waveguide guides high frequency waves in the VHF band or UHF band. The end of the waveguide is positioned facing the space and radiates high frequencies into the space. A gap is provided between the upper electrode and the dielectric plate. The width of the air gap is non-uniform in the extending direction of the dielectric plate.
本開示によれば、本開示は、プラズマ励起周波数がVHF帯又はUHF帯の平行平板型のプラズマ処理装置において、プラズマの均一性を向上し得る技術が提供される。 According to the present disclosure, the present disclosure provides a technique capable of improving plasma uniformity in a parallel plate type plasma processing apparatus in which the plasma excitation frequency is in the VHF band or UHF band.
以下、種々の例示的実施形態について説明する。例示的実施形態において、プラズマ処理装置が提供される。プラズマ処理装置は、処理容器、ステージ、誘電体板、上部電極、導波路、導波路の端部を備える。ステージは、処理容器内に設けられる。誘電体板は、ステージの上方に処理容器内の空間を介して設けられる。上部電極は、誘電体板の上方に設けられる。導波路は、VHF帯又はUHF帯の高周波を導波する。導波路の端部は、空間に向いて配置され、空間に高周波を放射する。上部電極と誘電体板との間に空隙が設けられる。空隙の幅は、誘電体板の延びる方向において、非一様である。 Various exemplary embodiments are described below. In an exemplary embodiment, a plasma processing apparatus is provided. A plasma processing apparatus includes a processing container, a stage, a dielectric plate, an upper electrode, a waveguide, and an end portion of the waveguide. A stage is provided in the processing container. A dielectric plate is provided above the stage via a space in the processing container. The upper electrode is provided above the dielectric plate. The waveguide guides high frequency waves in the VHF band or UHF band. The end of the waveguide is positioned facing the space and radiates high frequencies into the space. A gap is provided between the upper electrode and the dielectric plate. The width of the air gap is non-uniform in the extending direction of the dielectric plate.
VHF帯又はUHF帯の高周波の場合には、定在波の発生によって、誘電体板の下面の延びる方向におけるプラズマの均一性が低減され得る。しかし、例示的実施形態によれば、空隙の存在によって、定在波の発生が抑制されて空間内における上部電極(より具体的に誘電体板)の近傍での電界の勾配が低減され得る。よって、プラズマの均一性が向上され得る。また、例示的実施形態によれば、空隙の幅は、誘電体板の延びる方向(空隙が延びる方向)において、非一様である。即ち、空隙の幅は、定在波の発生が抑制されるように調整され得る。特に、VHF帯又はUHF帯の高周波が空間内に放射される場合において、空隙の幅の調整が可能となる。この調整によって、プラズマの生成時に上部電極(より具体的に誘電体板)と空間内で生じるプラズマとの間を伝搬する表面波(電波)の波長が好適に伸長され得る。よって、プラズマの均一性がより向上され得る。 In the case of high frequencies in the VHF band or UHF band, the generation of standing waves can reduce plasma uniformity in the extending direction of the lower surface of the dielectric plate. However, according to an exemplary embodiment, the presence of the air gap may suppress the generation of standing waves and reduce the gradient of the electric field in the space near the top electrode (more specifically the dielectric plate). Thus, plasma uniformity can be improved. Also, according to an exemplary embodiment, the width of the air gap is non-uniform in the direction in which the dielectric plate extends (the direction in which the air gap extends). That is, the width of the air gap can be adjusted to suppress the generation of standing waves. In particular, the width of the air gap can be adjusted when high frequencies in the VHF band or UHF band are radiated into the space. By this adjustment, the wavelength of the surface wave (radio wave) propagating between the upper electrode (more specifically, the dielectric plate) and the plasma generated in the space during plasma generation can be preferably extended. Therefore, plasma uniformity can be further improved.
例示的実施形態に係るプラズマ処理装置において、誘電体板の端部と上部電極の端部とは、弾性部材を介した押圧によって、互いに接続される。従って、プラズマからの入熱等により各部が熱膨張しても、誘電体板が割れる等の不具合が回避され得る。 In the plasma processing apparatus according to the exemplary embodiment, the edge of the dielectric plate and the edge of the upper electrode are connected to each other by pressing via the elastic member. Therefore, even if each part thermally expands due to heat input from the plasma, problems such as cracking of the dielectric plate can be avoided.
例示的実施形態に係るプラズマ処理装置において、空隙の幅は、上部電極及び誘電体板のそれぞれの端部から中心部に向けて増加する。従って、表面波による定在波の生成が回避され得る。 In the plasma processing apparatus according to the exemplary embodiment, the width of the air gap increases from the edge to the center of each of the upper electrode and the dielectric plate. Thus, the generation of standing waves by surface waves can be avoided.
例示的実施形態に係るプラズマ処理装置において、空隙の幅は、上部電極及び誘電体板のそれぞれの端部から中心部に向けて減少する。従って、表面波の減衰が抑制され得る。 In the plasma processing apparatus according to the exemplary embodiment, the width of the air gap decreases from the edge to the center of each of the upper electrode and the dielectric plate. Therefore, attenuation of surface waves can be suppressed.
例示的実施形態に係るプラズマ処理装置において、空隙に露出する上部電極の下面は、波打つ形状を有する。従って、プラズマシースの非線形な電流電圧特性により生じる高調波による影響を低減し得る。 In the plasma processing apparatus according to the exemplary embodiment, the lower surface of the upper electrode exposed in the gap has a wavy shape. Therefore, the influence of harmonics caused by the nonlinear current-voltage characteristics of the plasma sheath can be reduced.
例示的実施形態に係るプラズマ処理装置は、上部電極と誘電体板との間に配置された誘電体ロッドを更に備える。空隙は、上部電極の端部と誘電体板の端部とが互いに密着される状態において上部電極と誘電体板とが離間することによって、画定される。従って、空隙は、誘電体ロッドによって、安定的に設けられ得る。 A plasma processing apparatus according to an exemplary embodiment further comprises a dielectric rod positioned between the upper electrode and the dielectric plate. The air gap is defined by the separation of the top electrode and the dielectric plate with the edges of the top electrode and the dielectric plate in close contact with each other. Therefore, the air gap can be stably provided by the dielectric rod.
例示的実施形態に係るプラズマ処理装置は、空隙に露出する上部電極の下面に交差する基準方向に誘電体ロッドを移動させる駆動機構を更に備える。誘電体ロッドは、前記誘電体板に接続又は接合される、或いは、該誘電体板と一体に形成される。誘電体ロッドの移動に伴って、誘電体板が上部電極に近付く又は離れる。従って、誘電体ロッドを移動させることによって、空隙の幅の詳細な調整が可能となる。 The plasma processing apparatus according to the exemplary embodiment further includes a driving mechanism for moving the dielectric rod in a reference direction intersecting the lower surface of the upper electrode exposed in the air gap. A dielectric rod is connected or joined to the dielectric plate or formed integrally with the dielectric plate. As the dielectric rod moves, the dielectric plate approaches or separates from the upper electrode. Therefore, fine adjustment of the width of the air gap is possible by moving the dielectric rod.
例示的実施形態に係るプラズマ処理装置において、駆動機構は、誘電体ロッドを基準方向に駆動し、空隙の幅を伸縮する。 In the plasma processing apparatus according to the exemplary embodiment, the drive mechanism drives the dielectric rod in the reference direction to expand or contract the width of the air gap.
例示的実施形態に係るプラズマ処理装置において、駆動機構は、モーターと第1プーリーと絶縁シャフトとベルトと駆動部とを備える。モーターは、上部電極上に設けられる。第1プーリーとベルトと駆動部とは、上部電極内に設けられる。絶縁シャフトは、モーターに連結する。第1プーリーは、絶縁シャフトとベルトとを連結する。駆動部は、誘電体ロッドとベルトとを連結し、絶縁シャフト及びベルトを介して伝達されるモーターの動力を用いて基準方向に誘電体ロッドを駆動する。駆動部は、第2プーリーとシャフトとを備える。第2プーリーは、ベルトとシャフトとを連結する。シャフトは、誘電体ロッドにフローティングジョイントを介して連結する。 In the plasma processing apparatus according to an exemplary embodiment, the drive mechanism comprises a motor, a first pulley, an insulating shaft, a belt and a drive. A motor is provided on the upper electrode. The first pulley, belt and drive are provided within the upper electrode. An insulated shaft connects to the motor. A first pulley connects the insulating shaft and the belt. The driving unit connects the dielectric rod and the belt, and drives the dielectric rod in the reference direction using power of the motor transmitted through the insulating shaft and the belt. The drive includes a second pulley and a shaft. A second pulley connects the belt and the shaft. The shaft connects to the dielectric rod via a floating joint.
例示的実施形態に係るプラズマ処理装置において、駆動機構は、上部電極と誘電体板とを離隔するように誘電体ロッドを基準方向に沿って移動させ、空隙の幅を広げる。 In the plasma processing apparatus according to the exemplary embodiment, the drive mechanism moves the dielectric rod along the reference direction so as to separate the upper electrode and the dielectric plate, thereby increasing the width of the gap.
例示的実施形態に係るプラズマ処理装置において、駆動機構は、モーターと第1プーリーと絶縁シャフトとベルトと駆動部とを備える。モーターは、上部電極上に設けられる。第1プーリーとベルトと駆動部とは、上部電極内に設けられる。絶縁シャフトは、モーターに連結する。第1プーリーは、絶縁シャフトとベルトとを連結する。駆動部は、誘電体ロッドとベルトとを連結し、絶縁シャフト及びベルトを介して伝達されるモーターの動力を用いて基準方向に誘電体ロッドを駆動する。駆動部は、第2プーリーとシャフトとを備える。第2プーリーは、ベルトをシャフトに連結する。シャフトは、誘電体ロッドに連結する。 In the plasma processing apparatus according to an exemplary embodiment, the drive mechanism comprises a motor, a first pulley, an insulating shaft, a belt and a drive. A motor is provided on the upper electrode. The first pulley, belt and drive are provided within the upper electrode. An insulated shaft connects to the motor. A first pulley connects the insulating shaft and the belt. The driving unit connects the dielectric rod and the belt, and drives the dielectric rod in the reference direction using power of the motor transmitted through the insulating shaft and the belt. The drive includes a second pulley and a shaft. A second pulley connects the belt to the shaft. The shaft connects to the dielectric rod.
例示的実施形態に係るプラズマ処理装置において、誘電体板は、シャワープレートである。従って、誘電体板がシャワープレートなので、空間へのガスの供給が誘電体板の下面から行える。 In the plasma processing apparatus according to the exemplary embodiment, the dielectric plate is a shower plate. Therefore, since the dielectric plate is a shower plate, gas can be supplied to the space from the lower surface of the dielectric plate.
例示的実施形態に係るプラズマ処理装置において、上部電極は、複数の第1ガス吐出孔を有する。誘電体板は、複数の第2ガス吐出孔を有する。複数の第1ガス吐出孔と、複数の第2ガス吐出孔とは、空隙を介して連通する。少なくとも複数の第1ガス吐出孔の一部と複数の第2ガス吐出孔の一部とは、互いに重なるように設けられる。従って、複数の前記第1ガス吐出孔及び複数の第2ガス吐出孔において互いに重なり合う第1ガス吐出孔及び第2ガス吐出孔が設けられているので、上部電極及び誘電体板から空間内へのガスの流れは良好となり得る。 In the plasma processing apparatus according to the exemplary embodiment, the upper electrode has a plurality of first gas ejection holes. The dielectric plate has a plurality of second gas ejection holes. The plurality of first gas ejection holes and the plurality of second gas ejection holes communicate with each other through gaps. At least a portion of the plurality of first gas ejection holes and a portion of the plurality of second gas ejection holes are provided so as to overlap each other. Therefore, since the plurality of first gas ejection holes and the plurality of second gas ejection holes are provided with the first gas ejection holes and the second gas ejection holes overlapping each other, the flow from the upper electrode and the dielectric plate into the space Gas flow can be good.
例示的実施形態に係るプラズマ処理装置において、空隙は、外部のガス供給部に接続されたガス配管に連通している。 In the plasma processing apparatus according to the exemplary embodiment, the air gap communicates with a gas pipe connected to an external gas supply.
例示的実施形態に係るプラズマ処理装置において、ステージは、本体と導電層とを含む。本体は、絶縁体から形成される。導電層は、本体内に設けられる。導電層は、ステージ内に設けられた一つ以上の導電層のうちステージの上面から最短の距離を有し、環状に形成される。このように、ステージ内に設けられた一つ以上の導電層のうち該ステージの上面から最短の距離を有する導電層は、環状に形成されているので、ステージ上に載置される基板にかかる高周波バイアスが抑制され得る。 In a plasma processing apparatus according to an exemplary embodiment, a stage includes a body and a conductive layer. The body is formed from an insulator. A conductive layer is provided within the body. The conductive layer has the shortest distance from the upper surface of the stage among the one or more conductive layers provided in the stage and is formed in a ring shape. In this way, among the one or more conductive layers provided within the stage, the conductive layer having the shortest distance from the upper surface of the stage is formed in a ring shape, so that the conductive layer is applied to the substrate placed on the stage. High frequency bias can be suppressed.
例示的実施形態に係るプラズマ処理装置において、導電層は、ステージ上に載置される基板の直径よりも小さい外径を有する。 In the plasma processing apparatus according to the exemplary embodiment, the conductive layer has an outer diameter smaller than the diameter of the substrate placed on the stage.
例示的実施形態に係るプラズマ処理装置において、導電層は、ステージ上に載置される基板とステージとの間で静電引力を発生させるための電極、高周波が供給される電極、及び接地される電極のうち何れかである。 In the plasma processing apparatus according to the exemplary embodiment, the conductive layer includes an electrode for generating electrostatic attraction between the substrate placed on the stage and the stage, an electrode to which a high frequency is supplied, and a ground. any of the electrodes.
例示的実施形態に係るプラズマ処理装置において、導電層は、メッシュ状に形成される。 In the plasma processing apparatus according to the exemplary embodiment, the conductive layer is formed in a mesh shape.
例示的実施形態において、プラズマ処理方法が提供される。プラズマ処理方法は、プラズマ処理装置を用いて被処理体にプラズマ処理を行う。プラズマ処理装置は処理容器、上部電極、誘電体板、導波路、ステージを備える。ステージは処理容器内に設けられる。誘電体板はステージの上方に処理容器の空間を介して設けられる。上部電極は誘電体板の上方に設けられる。導波路はプラズマ処理に用いられるVHF帯又はUHF帯の高周波を導波する。導波路の端部は空間に向いて配置され空間に高周波を放射する。この方法は、上部電極と誘電体板との間に設けられた空隙の幅が誘電体板の延びる方向において非一様となっている状態において、プラズマ処理を行う。 In an exemplary embodiment, a plasma processing method is provided. A plasma processing method performs plasma processing on an object to be processed using a plasma processing apparatus. A plasma processing apparatus includes a processing container, an upper electrode, a dielectric plate, a waveguide, and a stage. A stage is provided within the processing vessel. A dielectric plate is provided above the stage through the space of the processing container. An upper electrode is provided above the dielectric plate. The waveguide guides high frequency waves in the VHF band or UHF band used for plasma processing. The end of the waveguide is directed toward the space and radiates high frequency into the space. In this method, plasma processing is performed in a state in which the width of the gap provided between the upper electrode and the dielectric plate is non-uniform in the extending direction of the dielectric plate.
このようなプラズマ処理方法では、空隙の存在によって、定在波の発生が抑制されて空間内における上部電極(より具体的に誘電体板)の近傍での電界の勾配が低減され得る。よって、プラズマの均一性が向上され得る。また、例示的実施形態によれば、空隙の幅は、誘電体板の延びる方向(空隙が延びる方向)において、非一様である。即ち、空隙の幅は、定在波の発生が抑制されるように調整され得る。特に、VHF帯又はUHF帯の高周波が空間内に放射される場合において、空隙の幅の調整が可能となる。この調整によって、プラズマの生成時に上部電極(より具体的に誘電体板)と空間内で生じるプラズマとの間を伝搬する表面波(電波)の波長が好適に伸長され得る。よって、プラズマの均一性がより向上され得る。 In such a plasma processing method, the existence of the air gap can suppress the generation of standing waves and reduce the gradient of the electric field in the vicinity of the upper electrode (more specifically, the dielectric plate) in the space. Thus, plasma uniformity can be improved. Also, according to an exemplary embodiment, the width of the air gap is non-uniform in the direction in which the dielectric plate extends (the direction in which the air gap extends). That is, the width of the air gap can be adjusted to suppress the generation of standing waves. In particular, the width of the air gap can be adjusted when high frequencies in the VHF band or UHF band are radiated into the space. By this adjustment, the wavelength of the surface wave (radio wave) propagating between the upper electrode (more specifically, the dielectric plate) and the plasma generated in the space during plasma generation can be preferably extended. Therefore, plasma uniformity can be further improved.
以下、図面を参照して種々の例示的実施形態について詳細に説明する。なお、各図面において同一又は相当の部分に対しては同一の符号を附すこととする。本開示において、「接触」とは、対象となる両者が固定されていない状態を表し、「接続」とは、対象となる両者が固定されていても固定されていなくてもよい状態を表し、「接合」とは、対象となる両者が固定されている状態を表す。 Various exemplary embodiments are described in detail below with reference to the drawings. In addition, suppose that the same code|symbol is attached|subjected to the part which is the same or equivalent in each drawing. In the present disclosure, “contact” represents a state in which both of the targets are not fixed, and “connection” represents a state in which both of the targets may or may not be fixed, “Joined” means a state in which both objects are fixed.
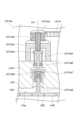
図1に示すプラズマ処理装置1Aの構成を説明する。プラズマ処理装置1Aは、処理容器CSを備える。プラズマ処理装置1Aは、空間SP、導波路壁UA1、上部電極UA21、空洞UA22、導波路UA31を備える。プラズマ処理装置1Aは、絶縁部材UA4、サポートリングUA51、誘電体板UA6、誘電体ロッドUA7、封止部材UA82、管UA9、空隙UB1、ガス配管UC31、を備える。
The configuration of the
プラズマ処理装置1Aは、側壁DA11、排気口DA11a、封止部材DA13、コモンモードフィルタDB61a、コモンモードフィルタDB61b、ヒータ電源DB62a、ヒータ電源DB62b、を備える。
The
プラズマ処理装置1Aは、ステージMA11、バッフル部材MB1、を備える。
The
処理容器CSは、略円筒形状を有する。処理容器CSは、鉛直方向に沿って延在している。 The processing container CS has a substantially cylindrical shape. The processing container CS extends along the vertical direction.
処理容器CSの中心軸線は、鉛直方向に延びる軸線AXである。処理容器CSは、導波路壁UA1、側壁DA11、導波路UA31を備える。 The center axis of the processing container CS is the axis AX extending in the vertical direction. The processing container CS includes a waveguide wall UA1, a side wall DA11, and a waveguide UA31.
本開示において、軸線AXの延びる方向は、基準方向と称する。換言すれば、基準方向は、空隙UB1に露出する上部電極UA21の下面UAfに交差する方向である。 In the present disclosure, the direction in which axis AX extends is referred to as a reference direction. In other words, the reference direction is a direction intersecting the lower surface UAf of the upper electrode UA21 exposed in the air gap UB1.
導波路壁UA1の天井部は、軸線AXに交差する面に(略水平に)延在している。導波路壁UA1の側部は、軸線AXに沿って導波路壁UA1の天井部に垂直に延びる。導波路壁UA1は、プラズマ処理装置1Aの上部電極UA21を囲んでいる。
The ceiling portion of the waveguide wall UA1 extends (substantially horizontally) in a plane that intersects the axis AX. A side portion of the waveguide wall UA1 extends perpendicularly to the ceiling portion of the waveguide wall UA1 along the axis AX. The waveguide wall UA1 surrounds the upper electrode UA21 of the
導波路壁UA1の材料は、アルミニウム又はアルミニウム合金等の導電性の材料であり得る。導波路壁UA1は、接地される。 The material of the waveguide wall UA1 can be a conductive material such as aluminum or an aluminum alloy. The waveguide wall UA1 is grounded.
導波路UA31は、導波路壁UA1と上部電極UA21との間の空間によって画定される。導波路UA31は、VHF帯又はUHF帯の高周波を導波し、高周波を空間SPに導入する。本開示において高周波とは、VHF帯又はUHF帯の高周波を意味する。 The waveguide UA31 is defined by the space between the waveguide wall UA1 and the upper electrode UA21. The waveguide UA31 guides high frequencies in the VHF band or UHF band and introduces the high frequencies into the space SP. In the present disclosure, high frequency means high frequency in the VHF band or UHF band.
導波路UA31は、高周波が放射される端部UA32を備える。端部UA32は、空間SPに向いて配置される。 The waveguide UA31 has an end UA32 from which high frequencies are radiated. The end UA32 is arranged facing the space SP.
端部UA32は、絶縁部材UA4および絶縁性のサポートリングUA51を介して、空間SPに高周波を放射する。空間SPは、誘電体板UA6とステージMA11との間の空間である。 The end portion UA32 radiates high frequencies into the space SP via the insulating member UA4 and the insulating support ring UA51. A space SP is a space between the dielectric plate UA6 and the stage MA11.
側壁DA11は、導波路壁UA1の側部の下側に軸線AXに沿って延びる。側壁DA11は、導波路壁UA1の下側において、軸線AXに沿って延びる。 The sidewall DA11 extends along the axis AX below the side of the waveguide wall UA1. The side wall DA11 extends along the axis AX below the waveguide wall UA1.
側壁DA11の材料は、アルミニウム又はアルミニウム合金等の導電性の材料であり得る。側壁DA11は、接地される。 The material of sidewall DA11 can be a conductive material such as aluminum or aluminum alloy. Side wall DA11 is grounded.
側壁DA11は、突起部DA12を備える。側壁DA11の突起部DA12は、側壁DA11の端部(導波路壁UA1の側部に接続される箇所)に設けられており、軸線AXに向けて軸線AXに交差する方向に延びる。突起部DA12は、封止部材DA13を介して絶縁部材UA4に接続される。封止部材DA13は、真空シール用の部材であり、例えばOリングであり得る。 The side wall DA11 has a protrusion DA12. The protrusion DA12 of the side wall DA11 is provided at the end of the side wall DA11 (the portion connected to the side of the waveguide wall UA1) and extends toward the axis AX in a direction crossing the axis AX. The protrusion DA12 is connected to the insulating member UA4 via the sealing member DA13. The sealing member DA13 is a member for vacuum sealing, and may be an O-ring, for example.
突起部DA12は、弾性部材DA10を介してサポートリングUA51に接続される。サポートリングUA51は、突起部DA12上に設けられる。弾性部材DA10は、押圧用に設けられている。 The protrusion DA12 is connected to the support ring UA51 via the elastic member DA10. A support ring UA51 is provided on the protrusion DA12. The elastic member DA10 is provided for pressing.
絶縁部材UA4は、端部UA32と、サポートリングUA51及び空間SPとの間に配置される。絶縁部材UA4と上部電極UA21とは、封止部材UA82を介して接続される。絶縁部材UA4の材料は、窒化アルミニウム、酸化アルミニウム等の絶縁性の材料であり得る。封止部材UA82は、真空シール用の部材であり、例えばOリングであり得る。 The insulating member UA4 is arranged between the end UA32, the support ring UA51 and the space SP. The insulating member UA4 and the upper electrode UA21 are connected via a sealing member UA82. The material of the insulating member UA4 can be an insulating material such as aluminum nitride or aluminum oxide. The sealing member UA82 is a member for vacuum sealing and may be an O-ring, for example.
上部電極UA21は、誘電体板UA6の上方に設けられる。上部電極UA21は、導波路壁UA1内に収容されている。上部電極UA21は、導波路壁UA1の天井部の下に配置されており、導波路壁UA1の側部によって囲まれている。 The upper electrode UA21 is provided above the dielectric plate UA6. The upper electrode UA21 is housed within the waveguide wall UA1. The upper electrode UA21 is arranged under the ceiling of the waveguide wall UA1 and is surrounded by the sides of the waveguide wall UA1.
上部電極UA21は、ステージMA11の上面MA13の上方において、処理容器CS内の空間SPと誘電体板UA6とを介して設けられる。上部電極UA21は、整合器UC2を介して高周波電源UC1に電気的に接続される。 The upper electrode UA21 is provided above the upper surface MA13 of the stage MA11 via the space SP in the processing container CS and the dielectric plate UA6. The upper electrode UA21 is electrically connected to a high frequency power supply UC1 via a matching box UC2.
上部電極UA21の材料は、アルミニウム又はアルミニウム合金等の導電性の材料であり得る。上部電極UA21の表面上には、耐腐食性を有する膜が形成される。耐腐食性を有する膜は、酸化アルミニウム膜、酸化イットリウム膜、または酸化アルミニウムや酸化イットリウム等を含むセラミック膜であり得る。 The material of the upper electrode UA21 can be a conductive material such as aluminum or aluminum alloy. A corrosion-resistant film is formed on the surface of the upper electrode UA21. The corrosion-resistant film can be an aluminum oxide film, a yttrium oxide film, or a ceramic film containing aluminum oxide, yttrium oxide, or the like.
高周波電源UC1は、上述した高周波を発生する電源である。整合器UC2は、高周波電源UC1の負荷のインピーダンスを高周波電源UC1の出力インピーダンスに整合させるための整合回路を含んでいる。 The high frequency power supply UC1 is a power supply that generates the high frequency described above. Matching box UC2 includes a matching circuit for matching the impedance of the load of high frequency power supply UC1 to the output impedance of high frequency power supply UC1.
上部電極UA21は、空洞UA22を備える。上部電極UA21は、複数のガス吐出孔UA22a(第1ガス吐出孔)を有する。空洞UA22は、ガス配管UC31を介してガス供給部UC3に連通している。 The upper electrode UA21 has a cavity UA22. The upper electrode UA21 has a plurality of gas ejection holes UA22a (first gas ejection holes). Cavity UA22 communicates with gas supply unit UC3 via gas pipe UC31.
空洞UA22は、複数のガス吐出孔UA22aに連通している。空洞UA22は、複数のガス吐出孔UA22aと、更に、空隙UB1、誘電体板UA6の複数のガス吐出孔UB2とを介して、空間SPに連通している。 The cavity UA22 communicates with a plurality of gas ejection holes UA22a. The cavity UA22 communicates with the space SP via a plurality of gas ejection holes UA22a, an air gap UB1, and a plurality of gas ejection holes UB2 of the dielectric plate UA6.
誘電体板UA6は、上部電極UA21の直下に設けられる。誘電体板UA6は、ステージMA11の上面MA13の上方に処理容器CS内の空間SPを介して設けられる。 A dielectric plate UA6 is provided directly below the upper electrode UA21. The dielectric plate UA6 is provided above the upper surface MA13 of the stage MA11 via a space SP within the processing container CS.
誘電体板UA6は、複数のガス吐出孔UB2(第2ガス吐出孔)を有する。一実施形態において、誘電体板UA6は、シャワープレートである。 The dielectric plate UA6 has a plurality of gas ejection holes UB2 (second gas ejection holes). In one embodiment, dielectric plate UA6 is a shower plate.
複数のガス吐出孔UA22aと、複数のガス吐出孔UB2とは、空隙UB1を介して連通する。少なくとも複数のガス吐出孔UA22aの一部と複数のガス吐出孔UB2の一部とは、上部電極UA21の上方(軸線AXの方向)から見て、互いに重なるように設けられる。例えば、空隙UB1のうち幅がより小さい部分ほど、当該部分に配置されるガス吐出孔UA22aとガス吐出孔UB2とは互いに重なり合うように設けられている。 The plurality of gas ejection holes UA22a and the plurality of gas ejection holes UB2 communicate with each other through gaps UB1. At least some of the plurality of gas ejection holes UA22a and some of the plurality of gas ejection holes UB2 are provided so as to overlap each other when viewed from above the upper electrode UA21 (in the direction of the axis AX). For example, the smaller the width of the gap UB1, the more overlapping the gas ejection holes UA22a and UB2.
誘電体板UA6の端部は、サポートリングUA51によって上部電極UA21の端部に密着される。誘電体板UA6は、空間SPを介してステージMA11の上面MA13に対面している。 The end of the dielectric plate UA6 is brought into close contact with the end of the upper electrode UA21 by a support ring UA51. Dielectric plate UA6 faces upper surface MA13 of stage MA11 via space SP.
誘電体板UA6の中心軸線は、軸線AXに略一致している。誘電体板UA6には、ステージMA11の上面MA13に載置された基板W(被処理体)の全面に均等にガスが供給されるように、複数のガス吐出孔UB2が配置される。 A central axis of the dielectric plate UA6 substantially coincides with the axis AX. A plurality of gas ejection holes UB2 are arranged in the dielectric plate UA6 so that the gas is uniformly supplied to the entire surface of the substrate W (object to be processed) placed on the upper surface MA13 of the stage MA11.
誘電体板UA6の下面とステージMA11の上面MA13との間の鉛直方向における距離(空間SPの幅)は、例えば5[cm]以上且つ30[cm]以下であり得る。 The vertical distance (the width of the space SP) between the lower surface of the dielectric plate UA6 and the upper surface MA13 of the stage MA11 can be, for example, 5 [cm] or more and 30 [cm] or less.
誘電体板UA6は、平板状であり、可撓性を有している。誘電体板UA6の材料は、窒化アルミニウム、酸化アルミニウム等の誘電体であり得る。誘電体板UA6の厚みは、略均一であり得る。誘電体板UA6は、略円盤形状を有している。誘電体板UA6は、窒化アルミニウム、酸化アルミニウム、酸化イットリウム、又は窒化アルミニウム、酸化アルミニウム、酸化イットリウム等を含む誘電体から形成されている。誘電体板UA6の表面(特に下面UA61)には、耐腐食性を有する膜が形成されていてもよい。耐腐食性を有する膜は、酸化イットリウム膜、酸化フッ化イットリウム膜、フッ化イットリウム膜、又は酸化イットリウム、フッ化イットリウム等を含むセラミック膜であり得る。 The dielectric plate UA6 is flat and flexible. The material of the dielectric plate UA6 can be a dielectric such as aluminum nitride or aluminum oxide. The thickness of the dielectric plate UA6 can be substantially uniform. The dielectric plate UA6 has a substantially disk shape. The dielectric plate UA6 is made of aluminum nitride, aluminum oxide, yttrium oxide, or a dielectric containing aluminum nitride, aluminum oxide, yttrium oxide, or the like. A corrosion-resistant film may be formed on the surface of the dielectric plate UA6 (in particular, the lower surface UA61). The corrosion-resistant film can be a yttrium oxide film, a yttrium oxide fluoride film, a yttrium fluoride film, or a ceramic film including yttrium oxide, yttrium fluoride, or the like.
サポートリングUA51は、誘電体板UA6を上部電極UA21に密着する部材である。サポートリングUA51は、絶縁部材UA4に接続される。サポートリングUA51の材料は、窒化アルミニウム、酸化アルミニウム等の絶縁性の材料であり得る。 The support ring UA51 is a member that brings the dielectric plate UA6 into close contact with the upper electrode UA21. The support ring UA51 is connected to the insulating member UA4. The material of the support ring UA51 can be an insulating material such as aluminum nitride or aluminum oxide.
絶縁部材UA4とサポートリングUA51とは、側壁DA11の突起部DA12上に並置される。絶縁部材UA4とサポートリングUA51とは、突起部DA12と上部電極UA21の外周部UA24との間に挟まれる。 The insulating member UA4 and the support ring UA51 are juxtaposed on the protrusion DA12 of the side wall DA11. The insulating member UA4 and the support ring UA51 are sandwiched between the protrusion DA12 and the outer peripheral portion UA24 of the upper electrode UA21.
上部電極UA21と誘電体板UA6との間に、誘電体ロッドUA7が配置される。誘電体ロッドUA7は、軸線AX上に配置され得る。誘電体ロッドUA7は、軸線AXに沿って延びる。 A dielectric rod UA7 is arranged between the upper electrode UA21 and the dielectric plate UA6. The dielectric rod UA7 can be arranged on the axis AX. The dielectric rod UA7 extends along the axis AX.
誘電体ロッドUA7は、上部電極UA21に接続されている。誘電体ロッドUA7は、誘電体板UA6に接触している、又は、誘電体板UA6に接合(固定)されている。誘電体ロッドUA7の材料は、窒化アルミニウム、酸化アルミニウム等の誘電体であり得る。 The dielectric rod UA7 is connected to the upper electrode UA21. The dielectric rod UA7 is in contact with the dielectric plate UA6 or joined (fixed) to the dielectric plate UA6. The material of the dielectric rod UA7 can be a dielectric such as aluminum nitride, aluminum oxide.
空隙UB1は、上部電極UA21と誘電体板UA6との間に設けられ得る。空隙UB1は、上部電極UA21と誘電体板UA6との離間によって形成され得る。空隙UB1は、上部電極UA21の下面UAfと、誘電体板UA6の上面UAgとによって画定される。上部電極UA21の下面UAfは、上に凸の曲面であり得る。空隙UB1の幅は、径方向位置の関数(概ね余弦関数又はガウス関数)になっている。 An air gap UB1 may be provided between the upper electrode UA21 and the dielectric plate UA6. The air gap UB1 can be formed by the separation between the upper electrode UA21 and the dielectric plate UA6. Air gap UB1 is defined by lower surface UAf of upper electrode UA21 and upper surface UAg of dielectric plate UA6. The lower surface UAf of the upper electrode UA21 may be an upwardly convex curved surface. The width of the air gap UB1 is a function of radial position (roughly a cosine or Gaussian function).
空隙UB1は、上部電極UA21の端部(外周部UA24)と誘電体板UA6の端部とが互いに密着される状態において上部電極UA21と誘電体板UA6とが離間することによって、画定される。 The gap UB1 is defined by separating the upper electrode UA21 and the dielectric plate UA6 in a state where the end of the upper electrode UA21 (outer peripheral portion UA24) and the end of the dielectric plate UA6 are in close contact with each other.
上部電極UA21と誘電体板UA6とは、誘電体ロッドUA7が配置されている軸線AXにおいて最も大きく離間している。空隙UB1の幅(上部電極UA21の下面UAfと誘電体板UA6の上面UAgとの間の距離)は、誘電体板UA6(及び、後述の誘電体板UA6a)の延びる方向において、一様(一定)では無く、非一様であり得る。このように、上部電極UA21とプラズマとの間に空隙UB1を設けると、プラズマから流れ込む高周波電流が低下し、プラズマの励起が抑制される。本実施形態のように、上部電極UA21の面内において空隙UB1の幅を最適化することにより、基板Wの上部に一様なプラズマを生成することが出来る。 The upper electrode UA21 and the dielectric plate UA6 are separated the most from the axis AX on which the dielectric rod UA7 is arranged. The width of the air gap UB1 (the distance between the lower surface UAf of the upper electrode UA21 and the upper surface UAg of the dielectric plate UA6) is uniform (constant) in the extending direction of the dielectric plate UA6 (and the dielectric plate UA6a described later). ) and can be non-uniform. Thus, when the air gap UB1 is provided between the upper electrode UA21 and the plasma, the high-frequency current flowing from the plasma is reduced and the plasma excitation is suppressed. Uniform plasma can be generated above the substrate W by optimizing the width of the air gap UB1 in the plane of the upper electrode UA21 as in this embodiment.
ステージMA11は、本体MA11aと、導電層MA15とを備える。ステージMA11は、処理容器CS内に設けられる。ステージMA11は、ステージMA11の上面MA13の上に載置された基板Wを略水平に支持するように構成される。 The stage MA11 includes a main body MA11a and a conductive layer MA15. Stage MA11 is provided in processing container CS. The stage MA11 is configured to substantially horizontally support the substrate W placed on the upper surface MA13 of the stage MA11.
ステージMA11は、略円盤形状を有している。ステージMA11の中心軸線は、軸線AXに略一致している。 Stage MA11 has a substantially disk shape. The central axis of stage MA11 substantially coincides with axis AX.
導電層MA15は、ステージMA11の上面MA13を介して、上面MA13に載置される基板Wを加熱するヒータ(抵抗加熱素子)として機能する。導電層MA15は、ヒータ部材MA15aとヒータ部材MA15bとを備える。導電層MA15の材料は、タングステン、モリブデン等の金属であり得る。 The conductive layer MA15 functions as a heater (resistive heating element) that heats the substrate W placed on the upper surface MA13 of the stage MA11 via the upper surface MA13. The conductive layer MA15 comprises a heater member MA15a and a heater member MA15b. The material of the conductive layer MA15 can be a metal such as tungsten or molybdenum.
ヒータ部材MA15aとヒータ部材MA15bとは、本体MA11aの内部に埋め込まれる。ヒータ部材MA15aとヒータ部材MA15bとは、接触していない。本体MA11aの材料は、窒化アルミニウム、酸化アルミニウム等の絶縁体である。 The heater member MA15a and the heater member MA15b are embedded inside the main body MA11a. The heater member MA15a and the heater member MA15b are not in contact with each other. The material of the main body MA11a is an insulator such as aluminum nitride or aluminum oxide.
ステージMA11の加熱領域は、径方向に二つのゾーンに分割される。それぞれのゾーンの加熱は、導電層MA15によって行われる。 The heating area of stage MA11 is divided radially into two zones. Heating of each zone is provided by a conductive layer MA15.
ヒータ部材MA15aは、本体MA11aの中央部にあるゾーンを加熱する。ヒータ部材MA15bは、本体MA11aの外周部にあるゾーンを加熱する。 Heater member MA15a heats a zone in the center of body MA11a. The heater member MA15b heats a zone on the outer periphery of the main body MA11a.
ヒータ部材MA15aには、コモンモードフィルタDB61aが電気的に接続される。コモンモードフィルタDB61aには、ヒータ電源DB62bが電気的に接続される。 A common mode filter DB61a is electrically connected to the heater member MA15a. A heater power source DB 62b is electrically connected to the common mode filter DB 61a.
ヒータ部材MA15bには、コモンモードフィルタDB61bが電気的に接続される。コモンモードフィルタDB61bには、ヒータ電源DB62bが電気的に接続される。コモンモードフィルタDB61aがヒータ部材MA15aとヒータ電源DB62aとの間に設けられ、コモンモードフィルタDB61bがヒータ部材MA15bとヒータ電源DB62bとの間に設けられる。 A common mode filter DB61b is electrically connected to the heater member MA15b. A heater power source DB 62b is electrically connected to the common mode filter DB 61b. A common mode filter DB61a is provided between the heater member MA15a and the heater power source DB62a, and a common mode filter DB61b is provided between the heater member MA15b and the heater power source DB62b.
コモンモードフィルタDB61a及びコモンモードフィルタDB61bは、それぞれ、プラズマ励起周波数において比較的に高いコモンモードインピーダンスを有する。このため、ヒータ部材MA15aとヒータ部材MA15bとの間の電気的な結合が弱められ得る。これによって、ステージMA11の本体MA11aにおける外周部と中央部とにおいて、プラズマとヒータ部材MA15a及びヒータ部材MA15bとの間の電気的結合が抑制され基板Wの中央部と端部との間にかかる高周波電界が抑制され得る。 Common mode filter DB61a and common mode filter DB61b each have a relatively high common mode impedance at the plasma excitation frequency. Therefore, the electrical coupling between the heater members MA15a and MA15b can be weakened. As a result, the electrical coupling between the plasma and the heater members MA15a and MA15b is suppressed at the outer peripheral portion and the central portion of the main body MA11a of the stage MA11, and the high frequency applied between the central portion and the edge portion of the substrate W is suppressed. Electric fields can be suppressed.
バッフル部材MB1は、ステージMA11と側壁DA11との間で延在している。バッフル部材MB1は、略環状の板材である。バッフル部材13の材料は、例えば、窒化アルミニウム、酸化アルミニウム等の絶縁体であり得る。 Baffle member MB1 extends between stage MA11 and side wall DA11. The baffle member MB1 is a substantially annular plate member. The material of the baffle member 13 can be, for example, an insulator such as aluminum nitride or aluminum oxide.
バッフル部材MB1には、複数の貫通孔が形成される。複数の貫通孔は、バッフル部材MB1をその板厚方向に貫通している。 A plurality of through holes are formed in the baffle member MB1. The plurality of through holes penetrate the baffle member MB1 in its thickness direction.
ステージMA11の裏面MA14下の領域は、排気口DA11aに連通する。排気口DA11aは、外部の排気装置に接続される。排気装置は、圧力制御弁並びにターボ分子ポンプ及び/又はドライポンプ等の真空ポンプを含み得る。 A region under the rear surface MA14 of the stage MA11 communicates with the exhaust port DA11a. The exhaust port DA11a is connected to an external exhaust device. The evacuation system may include a pressure control valve and a vacuum pump such as a turbomolecular pump and/or a dry pump.
プラズマ処理装置1Aには、ガス供給部UC3が接続される。ガス供給部UC3は、絶縁性の管UA9によって高周波から保護され、上部電極UA21内の空洞UA22に連通するガス配管UC31に接続される。
A gas supply unit UC3 is connected to the
ガス供給部UC3からのガスは、ガス配管UC31、空洞UA22、複数のガス吐出孔UA22a、空隙UB1、複数のガス吐出孔UB2を順に介して、空間SPに供給される。ガス供給部UC3は、基板Wの処理のために用いられる一つ以上のガス源を含む。ガス供給部UC3は、一つ以上のガス源からのガスの流量をそれぞれ制御するための一つ以上の流量制御器を含む。 Gas from the gas supply unit UC3 is supplied to the space SP through the gas pipe UC31, the cavity UA22, the plurality of gas ejection holes UA22a, the gap UB1, and the plurality of gas ejection holes UB2 in this order. The gas supply UC3 contains one or more gas sources used for processing the substrate W. FIG. Gas supply UC3 includes one or more flow controllers for respectively controlling the flow of gases from one or more gas sources.
ガス供給部UC3と空洞UA22とを連通するガス配管UC31は、導波路UA31内において絶縁性の管UA9によって覆われており、管UA9によって導波路UA31内の高周波から保護される。管UA9の材料は、窒化アルミニウム、酸化アルミニウム等の絶縁性の材料であり得る。 A gas pipe UC31 communicating between the gas supply unit UC3 and the cavity UA22 is covered by an insulating tube UA9 inside the waveguide UA31, and is protected from high frequencies in the waveguide UA31 by the tube UA9. The material of the tube UA9 can be an insulating material such as aluminum nitride, aluminum oxide.
プラズマ処理装置1Aでは、バッフル部材MB1の上側で延在する処理容器CS(より具体的に側壁DA11)の内壁面の面積は、空間SP側の誘電体板UA6の表面積(下面UA61の面積)に略等しい。即ち、空間SPを画定する面のうちグランド電位に設定された面(グランド面)の面積は、空間SPを画定する面のうち誘電体板UA6によって提供される面の面積と略同一である。かかる構成により、プラズマが、誘電体板UA6の直下の領域及びグランド面の周囲の領域で均一な密度で生成される。その結果、基板Wのプラズマ処理の面内均一性が向上される。
In the
プラズマ処理装置1Aにおいて、高周波は、導波路UA31の端部UA32から軸線AXに向けて空間SP内に導入される。高周波が空間SPに導入されると、ガスが空間SP内で励起されて、当該ガスからプラズマが生成される。プラズマは、空間SP内で周方向において均一な密度分布で生成される。ステージMA11上の基板Wは、プラズマからの化学種によって処理される。
In the
以下、図2を参照して、別の例示的実施形態に係るプラズマ処理装置1Bについて説明する。プラズマ処理装置1Bにおける誘電体板UA6の下面UA61とステージMA11の上面MA13との間の鉛直方向における距離(空間SPの幅)は、プラズマ処理装置1Aの場合に比較して短く、例えば5[mm]以上且つ15[mm]以下であり得る。プラズマ処理装置1Bの構成とプラズマ処理装置1Aの構成とは、空間SPの幅の相違に応じて、異なる。
A
プラズマ処理装置1Bは、処理容器CSを備える。プラズマ処理装置1Bは、空間SP、導波路壁UA1、上部電極UA21、空洞UA22、導波路UA31、絶縁部材UA4、サポートリングUA51、カバーリングUA52、誘電体板UA6、弾性部材UA81、封止部材UA82、管UA9を備える。プラズマ処理装置1Bは、空隙UB1、ガス配管UC31、駆動機構UD10を備える。
The
プラズマ処理装置1Bは、ステージMA11、導電部MA21、導電板MA22、導電性弾性部材MA23、排気室MA31、壁部MA32、通気孔MA33を備える。
The
プラズマ処理装置1Bは、封止部材DA13、入出口DA2、支持部DB11、排気管DB12、ベローズDB21、ベローズDB22、ばねDB3、水冷プレートDB4を備える。
The
処理容器CSは、導波路壁UA1、側壁DA11、導波路UA31を備える。 The processing container CS includes a waveguide wall UA1, a side wall DA11, and a waveguide UA31.
以下、プラズマ処理装置1Bの説明は、主に、プラズマ処理装置1Aと異なる構成のみに対して行われる。
Hereinafter, the description of the
側壁DA11の突起部DA12は、側壁DA11の端部(導波路壁UA1の側部に接続される箇所)に設けられており、軸線AXに向けて軸線AXに交差する方向に延びる。 The protrusion DA12 of the side wall DA11 is provided at the end of the side wall DA11 (the portion connected to the side of the waveguide wall UA1) and extends toward the axis AX in a direction crossing the axis AX.
突起部DA12は、導電性弾性部材MA23を介して排気室MA31の壁部MA32に接続される。導電性弾性部材MA23は、弾性体であり、例えばスパイラルリングであり得る。導電性弾性部材MA23の材料は、例えば、ステンレス、インコネル、ニッケル、タングステン、タンタル、銅合金又はモリブデン等の金属である。導電性弾性部材MA23は、ニッケル、アルミニウム、ステンレス又は金等の保護膜により被覆されていてもよい。 The projecting portion DA12 is connected to the wall portion MA32 of the exhaust chamber MA31 via the conductive elastic member MA23. The conductive elastic member MA23 is an elastic body and may be, for example, a spiral ring. The material of the conductive elastic member MA23 is, for example, metal such as stainless steel, inconel, nickel, tungsten, tantalum, copper alloy, or molybdenum. The conductive elastic member MA23 may be covered with a protective film of nickel, aluminum, stainless steel, gold, or the like.
絶縁部材UA4は、導波路UA31の端部UA32と空間SPとの間に配置される。 The insulating member UA4 is arranged between the end UA32 of the waveguide UA31 and the space SP.
サポートリングUA51は、弾性部材UA81を介して絶縁部材UA4に接続される。弾性部材UA81は、例えばステンレス製のばねであり得る。 The support ring UA51 is connected to the insulating member UA4 via an elastic member UA81. The elastic member UA81 may be, for example, a stainless steel spring.
誘電体板UA6の端部と上部電極UA21の端部(外周部UA24)とは、弾性部材UA81等を介した押圧によって、互いに接続される。 The end of the dielectric plate UA6 and the end of the upper electrode UA21 (outer peripheral portion UA24) are connected to each other by pressing via an elastic member UA81 or the like.
カバーリングUA52は、ステージMA11の側面付近にプラズマが発生することを防止する部材である。カバーリングUA52の材料は、窒化アルミニウム、酸化アルミニウム等の絶縁性の材料であり得る。 The cover ring UA52 is a member that prevents plasma from being generated near the side surface of the stage MA11. The material of the cover ring UA52 can be an insulating material such as aluminum nitride, aluminum oxide.
プラズマ処理装置1Bは、更に、駆動機構UD10を備える。駆動機構UD10は、モーターUD11、絶縁シャフトUD12、プーリーUD13(第1プーリー)(pulley)、ベルトUD14、駆動部UD15aを備える。
The
モーターUD11は、導波路壁UA1上に設けられる。プーリーUD13とベルトUD14と駆動部UD15a(更に、後述する図5に示す駆動部UD15b)とは、上部電極UA21内に設けられる。 A motor UD11 is provided on the waveguide wall UA1. The pulley UD13, the belt UD14, and the drive unit UD15a (and the drive unit UD15b shown in FIG. 5, which will be described later) are provided in the upper electrode UA21.
絶縁シャフトUD12は、モーターUD11に連結する。プーリーUD13は、絶縁シャフトUD12とベルトUD14とを連結する。 The insulating shaft UD12 is connected to the motor UD11. A pulley UD13 connects the insulating shaft UD12 and the belt UD14.
絶縁シャフトUD12は、モーターUD11の回転駆動に応じて回転する。プーリーUD13は、絶縁シャフトUD12の回転移動をベルトUD14の直線移動に変える。 The insulating shaft UD12 rotates according to the rotational drive of the motor UD11. Pulley UD13 converts rotary movement of insulating shaft UD12 into linear movement of belt UD14.
ベルトUD14の直線移動が駆動部UD15aに伝達され、駆動部UD15aの誘電体ロッドUD15a9(図3及び図4を参照しつつ後述する)の移動(上部電極UA21の下面UAfに交差する基準方向の移動)が行われ得る。駆動部UD15aの構成については、後に詳述される。 The linear movement of the belt UD14 is transmitted to the drive unit UD15a, and the movement of the dielectric rod UD15a9 (described later with reference to FIGS. 3 and 4) of the drive unit UD15a (movement in the reference direction intersecting the lower surface UAf of the upper electrode UA21) ) can be performed. The configuration of the drive unit UD15a will be detailed later.
空隙UB1は、上部電極UA21と誘電体板UA6との離間によって形成される。空隙UB1の幅(上部電極UA21と誘電体板UA6との間の距離)は、駆動機構UD10によって調整され得る。上部電極UA21と誘電体板UA6とは、誘電体ロッドUD15a9を有する駆動部UD15aが配置される軸線AXにおいて最も大きく離間し得る。 The air gap UB1 is formed by the separation between the upper electrode UA21 and the dielectric plate UA6. The width of the air gap UB1 (the distance between the upper electrode UA21 and the dielectric plate UA6) can be adjusted by the drive mechanism UD10. The upper electrode UA21 and the dielectric plate UA6 can be separated the most at the axis AX along which the driving part UD15a having the dielectric rods UD15a9 is arranged.
プラズマ処理装置1BのステージMA11の材料は、アルミニウム又はアルミニウム合金等の導電性の材料であり得る。ステージMA11の表面には、酸化イットリウム、酸フッ化イットリウム、酸化アルミニウム等の保護膜が設けられ得る。
The material of the stage MA11 of the
排気室MA31は、導電性の壁部MA32を備える。排気室MA31は、外周部MA12の周囲から側壁DA11に向けて延びる。 The exhaust chamber MA31 comprises a conductive wall MA32. Exhaust chamber MA31 extends from the periphery of outer peripheral portion MA12 toward side wall DA11.
壁部MA32は、通気孔MA33を備える。排気室MA31は、空間SPに連通している。空間SPは、通気孔MA33を介して、排気室MA31に連通している。排気室MA31は、排気管DB12に連通している。 The wall MA32 is provided with vents MA33. The exhaust chamber MA31 communicates with the space SP. The space SP communicates with the exhaust chamber MA31 through the ventilation hole MA33. The exhaust chamber MA31 communicates with the exhaust pipe DB12.
壁部MA32の材料は、アルミニウム又はアルミニウム合金等の導電性の材料であり得る。 The material of wall MA32 can be a conductive material such as aluminum or an aluminum alloy.
排気管DB12は、外部の排気装置に接続される。排気装置は、圧力制御弁並びにターボ分子ポンプ及び/又はドライポンプ等の真空ポンプを含み得る。 The exhaust pipe DB12 is connected to an external exhaust device. The evacuation system may include a pressure control valve and a vacuum pump such as a turbomolecular pump and/or a dry pump.
空間SP内のガスは、通気孔MA33を介して排気室MA31に移動し、排気管DB12を介して外部に排気され得る。 The gas in the space SP can move to the exhaust chamber MA31 through the ventilation hole MA33 and be exhausted to the outside through the exhaust pipe DB12.
導電部MA21は、ステージMA11の外周部MA12と処理容器CSの側壁DA11との間に延びる。導電部MA21は、ステージMA11が有する導電層と処理容器CSの側壁DA11とに電気的に接続される。 The conductive portion MA21 extends between the outer peripheral portion MA12 of the stage MA11 and the side wall DA11 of the processing vessel CS. The conductive part MA21 is electrically connected to the conductive layer of the stage MA11 and the side wall DA11 of the processing container CS.
導電部MA21は、導波路UA31の端部UA32から放射される高周波が空間SPに導入されるように外周部MA12から側壁DA11に向けて延びる。導電部MA21は、導電板MA22を備える。導電部MA21は、壁部MA32の一部を含む。 The conductive portion MA21 extends from the outer peripheral portion MA12 toward the side wall DA11 so that the high frequency emitted from the end UA32 of the waveguide UA31 is introduced into the space SP. The conductive portion MA21 includes a conductive plate MA22. The conductive portion MA21 includes a portion of the wall portion MA32.
導電板MA22は、外周部MA12においてステージMA11の裏面MA14に電気的に接触している。導電板MA22は、ネジ(不図示)によって外周部MA12の裏面および壁部MA32の上面に接合(固定)される。 Conductive plate MA22 is in electrical contact with rear surface MA14 of stage MA11 at outer peripheral portion MA12. The conductive plate MA22 is joined (fixed) to the rear surface of the outer peripheral portion MA12 and the upper surface of the wall portion MA32 by screws (not shown).
導電板MA22は、可撓性の薄板である。導電板MA22の材料は、例えば、アルミニウム、アルミニウム合金、ステンレス、インコネル、ニッケル、タングステン、タンタル、銅合金又はモリブデン等の導電性の材料である。導電板MA22は、酸化アルミニウム、酸化イットリウム、酸化フッ化イットリウム、フッ化イットリウム、ニッケル、アルミニウム、ステンレス又は金等の保護膜により被覆されていてもよい。 The conductive plate MA22 is a flexible thin plate. The material of the conductive plate MA22 is, for example, a conductive material such as aluminum, aluminum alloy, stainless steel, inconel, nickel, tungsten, tantalum, copper alloy or molybdenum. The conductive plate MA22 may be covered with a protective film such as aluminum oxide, yttrium oxide, yttrium oxide fluoride, yttrium fluoride, nickel, aluminum, stainless steel, or gold.
側壁DA11は、入出口DA2を備える。基板Wは、入出口DA2を介して、処理容器CS内に搬入および搬出される。 The side wall DA11 has an inlet/outlet DA2. The substrate W is loaded into and unloaded from the processing container CS through the inlet/outlet DA2.
支持部DB11は、ステージMA11に接続される。ステージMA11は、支持部DB11上に設けられる。支持部DB11を上下移動(上部電極UA21に近付く移動又は上部電極UA21から離れる移動であり、以下同様。)させることによって、ステージMA11が上下移動する。 Support DB11 is connected to stage MA11. Stage MA11 is provided on support portion DB11. The stage MA11 is vertically moved by vertically moving the support part DB11 (moving toward the upper electrode UA21 or moving away from the upper electrode UA21; the same applies hereinafter).
支持部DB11の下部には、水冷プレートDB4が配置される。支持部DB11は、水冷プレートDB4に接している。ステージMA11の熱は、支持部DB11及び水冷プレートDB4を介して、外部に排出され得る。 A water cooling plate DB4 is arranged below the support part DB11. The support part DB11 is in contact with the water cooling plate DB4. The heat of stage MA11 can be discharged to the outside via support part DB11 and water cooling plate DB4.
排気管DB12は、壁部MA32に接続されており、排気室MA31に連通している。壁部MA32は、排気管DB12上に設けられる。排気管DB12を介して、排気室MA31内のガスが外部に排出され得る。 The exhaust pipe DB12 is connected to the wall portion MA32 and communicates with the exhaust chamber MA31. The wall portion MA32 is provided on the exhaust pipe DB12. The gas in the exhaust chamber MA31 can be discharged to the outside via the exhaust pipe DB12.
ばねDB3を介して排気管DB12を上下移動させることによって、排気室MA31及び壁部MA32が上下移動する。 By vertically moving the exhaust pipe DB12 via the spring DB3, the exhaust chamber MA31 and the wall portion MA32 are vertically moved.
ベローズDB22の材料は、ステンレス等の導電性の材料であり得る。ばねDB3の材料は、ステンレス等の導電性の材料であり得る。 The material of the bellows DB22 can be a conductive material such as stainless steel. The material of spring DB3 can be a conductive material such as stainless steel.
壁部MA32は、ばねDB3の弾性によって、上部電極UA21の側(上方)に安定的に配置され得る。これによって、壁部MA32の外周部は、突起部DA12の裏面に密着する。更に導電性弾性部材MA23の弾性によって、壁部MA32の外周部と突起部DA12とが安定的に電気的に接触され得る。 The wall portion MA32 can be stably arranged on the upper electrode UA21 side (above) due to the elasticity of the spring DB3. As a result, the outer peripheral portion of the wall portion MA32 is in close contact with the rear surface of the projection portion DA12. Furthermore, the elasticity of the conductive elastic member MA23 enables stable electrical contact between the outer peripheral portion of the wall portion MA32 and the projection portion DA12.
プラズマ処理装置1Bにおいて、高周波は、導波路UA31の端部UA32から絶縁部材UA4を介して、軸線AXに向けて空間SP内に導入される。高周波が空間SPに導入されると、ガスが空間SP内で励起されて、当該ガスからプラズマが生成される。プラズマは、空間SP内で周方向において均一な密度分布で生成される。ステージMA11上の基板Wは、プラズマからの化学種によって処理される。また、絶縁部材UA4によって、空間SPの周辺部への放電が抑制され得る。
In the
以下、図3、図4を参照して、駆動部UD15aの構成を説明する。駆動部UD15aは、プーリーUD15a1(第2プーリー)、調整ねじUD15a2、容器UD15a3、シャフトUD15a4、ばねUD15a5を備える。ばねUD15a5の材料は、例えば、ステンレス等であり得る。 The configuration of the drive unit UD15a will be described below with reference to FIGS. 3 and 4. FIG. The driving unit UD15a includes a pulley UD15a1 (second pulley), an adjusting screw UD15a2, a container UD15a3, a shaft UD15a4, and a spring UD15a5. The material of the spring UD15a5 can be, for example, stainless steel.
駆動部UD15aは、更に、OリングUD15a6、フローティングジョイントのオス部UD15a8、誘電体ロッドUD15a9を備える。誘電体ロッドUD15a9の材料は、窒化アルミニウム、酸化アルミニウム等の誘電体であり得る。 The driving portion UD15a further includes an O-ring UD15a6, a floating joint male portion UD15a8, and a dielectric rod UD15a9. The material of the dielectric rod UD15a9 can be a dielectric such as aluminum nitride, aluminum oxide.
誘電体ロッドUD15a9は、上部電極UA21と誘電体板UA6との間に配置される。誘電体ロッドUD15a9は、軸線AX上に配置され得る。 The dielectric rod UD15a9 is arranged between the upper electrode UA21 and the dielectric plate UA6. Dielectric rod UD15a9 may be arranged on axis AX.
誘電体ロッドUD15a9は、誘電体板UA6と一体に形成される、或いは、誘電体板UA6に接続又は接合(固定)される。 The dielectric rod UD15a9 is formed integrally with the dielectric plate UA6, or is connected or joined (fixed) to the dielectric plate UA6.
サポートリングUA51によって誘電体板UA6の端部が上部電極UA21の端部(外周部UA24)に密接される状態において、誘電体ロッドUD15a9は、上部電極UA21と誘電体板UA6との間隔(空隙UB1の幅)を伸縮し得る。 In a state in which the end of the dielectric plate UA6 is brought into close contact with the end of the upper electrode UA21 (outer peripheral portion UA24) by the support ring UA51, the dielectric rod UD15a9 fills the space (gap UB1 width).
駆動部UD15aを備える駆動機構UD10は、誘電体ロッドUD15a9を基準方向に駆動し、空隙UB1の幅を伸縮する。駆動部UD15aは、誘電体ロッドUD15a9とベルトUD14とを連結し、絶縁シャフトUD12及びベルトUD14を介して伝達されるモーターUD11の動力を用いて、基準方向に誘電体ロッドUD15a9を駆動する。 A drive mechanism UD10 having a drive unit UD15a drives a dielectric rod UD15a9 in the reference direction to expand or contract the width of the air gap UB1. The drive unit UD15a connects the dielectric rod UD15a9 and the belt UD14, and drives the dielectric rod UD15a9 in the reference direction using the power of the motor UD11 transmitted through the insulating shaft UD12 and the belt UD14.
プーリーUD15a1は、調整ねじUD15a2を備える。プーリーUD15a1は、ベルトUD14とシャフトUD15a4とを連結する。シャフトUD15a4は、フローティングジョイントのメス部UD15a7を備える。 The pulley UD15a1 has an adjusting screw UD15a2. Pulley UD15a1 connects belt UD14 and shaft UD15a4. The shaft UD15a4 has a female portion UD15a7 of a floating joint.
調整ねじUD15a2、シャフトUD15a4のそれぞれの中心軸は、軸線AXに略一致する。調整ねじUD15a2、シャフトUD15a4のそれぞれは、軸線AXに沿って直線的に移動し得る。 The central axes of the adjusting screw UD15a2 and the shaft UD15a4 substantially coincide with the axis AX. Each of the adjusting screw UD15a2 and the shaft UD15a4 can move linearly along the axis AX.
シャフトUD15a4は、誘電体ロッドUD15a9にフローティングジョイント(フローティングジョイントのメス部UD15a7及びフローティングジョイントのオス部UD15a8)を介して連結する。 The shaft UD15a4 is connected to the dielectric rod UD15a9 via a floating joint (a floating joint female portion UD15a7 and a floating joint male portion UD15a8).
フローティングジョイントのメス部UD15a7、フローティングジョイントのオス部UD15a8、誘電体ロッドUD15a9のそれぞれの中心軸は、軸線AXに略一致する。フローティングジョイントのメス部UD15a7、フローティングジョイントのオス部UD15a8、誘電体ロッドUD15a9のそれぞれは、軸線AXに沿って直線的に移動し得る。 The central axes of the floating joint female part UD15a7, the floating joint male part UD15a8, and the dielectric rod UD15a9 substantially coincide with the axis AX. Each of the floating joint female part UD15a7, the floating joint male part UD15a8, and the dielectric rod UD15a9 can move linearly along the axis AX.
プーリーUD15a1は、ベルトUD14に接続される。プーリーUD15a1は、ベルトUD14の直線移動を、軸線AXの回りの調整ねじUD15a2の回転移動と軸線AXに沿った調整ねじUD15a2の直線移動とに変える。 Pulley UD15a1 is connected to belt UD14. Pulley UD15a1 converts linear movement of belt UD14 into rotational movement of adjusting screw UD15a2 about axis AX and linear movement of adjusting screw UD15a2 along axis AX.
調整ねじUD15a2は、容器UD15a3に保持される。容器UD15a3は、上部電極UA21内に接合(固定)される。容器UD15a3内には、シャフトUD15a4の上端、ばねUD15a5が収容される。 The adjusting screw UD15a2 is held in the container UD15a3. The container UD15a3 is joined (fixed) inside the upper electrode UA21. The container UD15a3 accommodates the upper end of the shaft UD15a4 and the spring UD15a5.
調整ねじUD15a2の下端は、シャフトUD15a4の上端に接触する。調整ねじUD15a2の下端は、ばねUD15a5の弾性力によってシャフトUD15a4の上端に密着される。シャフトUD15a4は、調整ねじUD15a2の軸線AXに沿った直線移動に応じて、軸線AXに沿って直線的に移動する。 The lower end of the adjusting screw UD15a2 contacts the upper end of the shaft UD15a4. The lower end of the adjusting screw UD15a2 is brought into close contact with the upper end of the shaft UD15a4 by the elastic force of the spring UD15a5. The shaft UD15a4 linearly moves along the axis AX in accordance with the linear movement of the adjusting screw UD15a2 along the axis AX.
OリングUD15a6は、上部電極UA21内におけるシャフトUD15a4の配置を安定させると共に、空隙UB1を封止し得る。 The O-ring UD15a6 can stabilize the placement of the shaft UD15a4 in the upper electrode UA21 and seal the air gap UB1.
シャフトUD15a4の下端は、フローティングジョイントのメス部UD15a7を有する。フローティングジョイントのメス部UD15a7には、フローティングジョイントのオス部UD15a8が嵌め込まれる。フローティングジョイントのオス部UD15a8は、シャフトUD15a4の軸線AXに沿った直線移動に応じて、軸線AXに沿って直線的に移動する。 The lower end of the shaft UD15a4 has a female part UD15a7 of a floating joint. A male portion UD15a8 of the floating joint is fitted into the female portion UD15a7 of the floating joint. The male part UD15a8 of the floating joint moves linearly along the axis AX in accordance with the linear movement of the shaft UD15a4 along the axis AX.
フローティングジョイントのオス部UD15a8の下端は誘電体ロッドUD15a9に接続される。誘電体ロッドUD15a9は、フローティングジョイントのオス部UD15a8の軸線AXに沿った直線移動に応じて、軸線AXに沿って直線的に移動する。 The lower end of the male part UD15a8 of the floating joint is connected to the dielectric rod UD15a9. The dielectric rod UD15a9 moves linearly along the axis AX in accordance with the linear movement along the axis AX of the male portion UD15a8 of the floating joint.
即ち、モーターUD11による絶縁シャフトUD12の回転移動によって、誘電体ロッドUD15a9は軸線AXに沿って直線的に移動し得る。より具体的に、誘電体ロッドUD15a9はフローティングジョイントを介してモーターUD11の動力を受け得る。従って、シャフトUD15a4および誘電体ロッドUD15a9の軸が多少ずれても、誘電体ロッドUD15a9の駆動によって誘電体板UA6と上部電極UA21とを離隔及び近接させ得る。 That is, the rotational movement of the insulating shaft UD12 by the motor UD11 allows the dielectric rod UD15a9 to move linearly along the axis AX. More specifically, the dielectric rod UD15a9 can receive power from the motor UD11 through a floating joint. Therefore, even if the axes of the shaft UD15a4 and the dielectric rod UD15a9 are slightly misaligned, the dielectric plate UA6 and the upper electrode UA21 can be separated from each other by driving the dielectric rod UD15a9.
また、モーターUD11による絶縁シャフトUD12の回転移動がベルトUD14によって調整ねじUD15a2に伝達され得るので、モーターUD11は、導波路壁UA1の天井部上において軸線AXから離れた箇所に設けられ得る。このため、モーターUD11の配置位置は、導波路壁UA1上において比較的に柔軟に選択され得る。 In addition, since the rotational movement of the insulating shaft UD12 by the motor UD11 can be transmitted to the adjustment screw UD15a2 by the belt UD14, the motor UD11 can be provided on the ceiling of the waveguide wall UA1 at a location away from the axis AX. Therefore, the arrangement position of the motor UD11 can be selected relatively flexibly on the waveguide wall UA1.
駆動機構UD10は、上記した駆動部UD15aに代えて、図5に示す駆動部UD15bを備え得る。駆動部UD15bは、上部電極UA21内において駆動部UD15aと同様に配置される。 The drive mechanism UD10 may include a drive unit UD15b shown in FIG. 5 instead of the drive unit UD15a described above. The drive unit UD15b is arranged in the upper electrode UA21 in the same manner as the drive unit UD15a.
駆動部UD15bは、プーリーUD15b1(第2プーリー)、調整ねじUD15b2、容器UD15b3、ボールUD15b4、シャフトUD15b5、ベローズUD15b6、誘電体ロッドUD15b7を備える。 The drive unit UD15b includes a pulley UD15b1 (second pulley), an adjusting screw UD15b2, a container UD15b3, a ball UD15b4, a shaft UD15b5, a bellows UD15b6, and a dielectric rod UD15b7.
誘電体ロッドUD15b7は、上部電極UA21と誘電体板UA6との間に配置される。誘電体ロッドUD15b7は、軸線AX上に配置され得る。 Dielectric rod UD15b7 is arranged between upper electrode UA21 and dielectric plate UA6. Dielectric rod UD15b7 may be arranged on axis AX.
誘電体ロッドUD15b7の下部は、誘電体板UA6の上面UAgに設けられた穴に嵌合している。誘電体ロッドUD15b7の材料は、窒化アルミニウム、酸化アルミニウム等の誘電体であり得る。 A lower portion of the dielectric rod UD15b7 is fitted in a hole provided in the upper surface UAg of the dielectric plate UA6. The material of the dielectric rod UD15b7 can be a dielectric such as aluminum nitride, aluminum oxide.
駆動部UD15bを備える駆動機構UD10は、上部電極UA21と誘電体板UA6とを離隔するように誘電体ロッドUD15b7を基準方向に沿って直線的に移動させ、空隙UB1の幅を広げることができる。 The driving mechanism UD10 having the driving part UD15b can linearly move the dielectric rod UD15b7 along the reference direction so as to separate the upper electrode UA21 and the dielectric plate UA6, thereby widening the width of the air gap UB1.
駆動部UD15bは、誘電体ロッドUD15b7とベルトUD14とを連結し、絶縁シャフトUD12及びベルトUD14を介して伝達されるモーターUD11の動力を用いて、基準方向に誘電体ロッドUD15b7を駆動する。 The drive unit UD15b connects the dielectric rod UD15b7 and the belt UD14, and drives the dielectric rod UD15b7 in the reference direction using power of the motor UD11 transmitted via the insulating shaft UD12 and the belt UD14.
プーリーUD15b1は、調整ねじUD15b2を備える。プーリーUD15b1は、ベルトUD14をシャフトUD15b5に連結する。シャフトUD15b5は、誘電体ロッドUD15b7に連結する。 The pulley UD15b1 has an adjusting screw UD15b2. A pulley UD15b1 connects the belt UD14 to the shaft UD15b5. Shaft UD15b5 connects to dielectric rod UD15b7.
調整ねじUD15b2、シャフトUD15b5、誘電体ロッドUD15b7のそれぞれの中心軸は、軸線AXに略一致する。調整ねじUD15b2、シャフトUD15b5、誘電体ロッドUD15b7のそれぞれは、軸線AXに沿って直線的に移動し得る。 The central axes of the adjusting screw UD15b2, the shaft UD15b5, and the dielectric rod UD15b7 substantially coincide with the axis AX. Each of the adjusting screw UD15b2, the shaft UD15b5, and the dielectric rod UD15b7 can move linearly along the axis AX.
プーリーUD15b1は、ベルトUD14に接続される。プーリーUD15b1は、ベルトUD14の直線移動を、軸線AXの回りの調整ねじUD15b2の回転移動と軸線AXに沿った調整ねじUD15b2の直線移動とに変える。 Pulley UD15b1 is connected to belt UD14. Pulley UD15b1 converts linear movement of belt UD14 into rotational movement of adjusting screw UD15b2 about axis AX and linear movement of adjusting screw UD15b2 along axis AX.
調整ねじUD15b2は、容器UD15b3に保持される。容器UD15b3は、上部電極UA21に接続される。容器UD15a3内には、ボールUD15b4、シャフトUD15b5の上端、ベローズUD15b6が収容される。 The adjusting screw UD15b2 is held in the container UD15b3. The container UD15b3 is connected to the upper electrode UA21. A ball UD15b4, an upper end of a shaft UD15b5, and a bellows UD15b6 are accommodated in the container UD15a3.
調整ねじUD15b2の下端は、ボールUD15b4を介してシャフトUD15b5の上端に接続される。シャフトUD15b5の上端は、ベローズUD15b6の弾性力によってボールUD15b4を介して調整ねじUD15b2の下端に密着される。調整ねじUD15b2の下端は、ボールUD15b4が調整ねじUD15b2によって押圧されている状態において、ボールUD15b4に密着される。シャフトUD15b5は、調整ねじUD15b2の軸線AXに沿った直線移動に応じて、軸線AXに沿って直線的に移動する。 The lower end of adjusting screw UD15b2 is connected to the upper end of shaft UD15b5 via ball UD15b4. The upper end of the shaft UD15b5 is brought into close contact with the lower end of the adjusting screw UD15b2 via the ball UD15b4 by the elastic force of the bellows UD15b6. The lower end of the adjusting screw UD15b2 is in close contact with the ball UD15b4 while the ball UD15b4 is pressed by the adjusting screw UD15b2. The shaft UD15b5 linearly moves along the axis AX in accordance with the linear movement of the adjusting screw UD15b2 along the axis AX.
なお、このように、調整ねじUD15b2とシャフトUD15b5とは、接合(固定)されてはいない(ボールUD15b4を介して連結される)ので、互いに離隔し得る。 In this way, the adjusting screw UD15b2 and the shaft UD15b5 are not joined (fixed) (connected via the ball UD15b4), so they can be separated from each other.
ベローズUD15b6は、空隙UB1を封止し得る。ベローズUD15b6の材料は、ステンレス、アルミニウム合金等であり得る。 A bellows UD15b6 may seal the air gap UB1. The material of the bellows UD15b6 can be stainless steel, aluminum alloy, or the like.
シャフトUD15b5の下端は、誘電体ロッドUD15b7の上端に接続される。誘電体ロッドUD15b7の下端は、誘電体板UA6に接続される。誘電体ロッドUD15b7は、シャフトUD15b5の軸線AXに沿った直線移動に応じて、軸線AXに沿って直線的に移動する。 The lower end of shaft UD15b5 is connected to the upper end of dielectric rod UD15b7. A lower end of the dielectric rod UD15b7 is connected to the dielectric plate UA6. The dielectric rod UD15b7 moves linearly along the axis AX in response to the linear movement of the shaft UD15b5 along the axis AX.
即ち、モーターUD11による絶縁シャフトUD12の回転移動によって、誘電体ロッドUD15b7は軸線AXに沿って直線的に移動し得る。より具体的に、誘電体ロッドUD15b7の駆動は、誘電体板UA6と上部電極UA21とを離隔させ得る。 That is, the rotational movement of the insulating shaft UD12 by the motor UD11 allows the dielectric rod UD15b7 to move linearly along the axis AX. More specifically, driving the dielectric rod UD15b7 can separate the dielectric plate UA6 and the upper electrode UA21.
また、モーターUD11による絶縁シャフトUD12の回転移動がベルトUD14によって調整ねじUD15b2に伝達され得るので、モーターUD11は、導波路壁UA1の天井部上において軸線AXから離れた箇所に設けられ得る。このため、モーターUD11の配置位置は、導波路壁UA1上において比較的に柔軟に選択され得る。 In addition, since the rotational movement of the insulating shaft UD12 by the motor UD11 can be transmitted to the adjustment screw UD15b2 by the belt UD14, the motor UD11 can be provided on the ceiling of the waveguide wall UA1 at a location away from the axis AX. Therefore, the arrangement position of the motor UD11 can be selected relatively flexibly on the waveguide wall UA1.
以下、図6を参照して、別の例示的実施形態に係るプラズマ処理装置1Cについて説明する。プラズマ処理装置1Cは、処理容器CSを備える。プラズマ処理装置1Cは、空間SP、導波路壁UA1、上部電極UA21a、導波路UA31、絶縁部材UA4、誘電体板UA6a、封止部材UA82、封止部材UA83、管UA9、空隙UB1、ガス配管UC31を備える。
A
プラズマ処理装置1Cは、側壁DA11、排気口DA11a、封止部材DA13、弾性部材DA14を備える。
The
プラズマ処理装置1Cは、ステージMA11、プラズマ遮蔽板MB2を備える。
The
処理容器CSは、導波路壁UA1、側壁DA11、導波路UA31を備える。 The processing container CS includes a waveguide wall UA1, a side wall DA11, and a waveguide UA31.
以下、プラズマ処理装置1Cの説明は、主に、プラズマ処理装置1A及びプラズマ処理装置1Bと異なる構成のみに対して行われる。
Hereinafter, the description of the
側壁DA11は、ガス室MA41、壁部MA42、複数のガス放出溝MA43を備える。 The side wall DA11 includes a gas chamber MA41, a wall portion MA42, and a plurality of gas release grooves MA43.
ガス室MA41、壁部MA42、ガス放出溝MA43は、側壁DA11の端部(導波路壁UA1の側部に接続される箇所)に設けられており、軸線AXに向けて軸線AXに交差する方向に延びる。壁部MA42は封止部材DA13を介して、絶縁部材UA4に接続される。 The gas chamber MA41, the wall portion MA42, and the gas discharge groove MA43 are provided at the end portion of the side wall DA11 (the portion connected to the side portion of the waveguide wall UA1), and extend toward the axis line AX in a direction intersecting the axis line AX. extends to Wall portion MA42 is connected to insulating member UA4 via sealing member DA13.
ガス室MA41にはガス供給器UD2が接続され、ガス供給器UD2から供給されるガスはガス室MA41に貯められ得る。ガス室MA41にはガス放出溝MA43が接続され、ガス室MA41に貯められたガスはガス放出溝MA43を介して空間SPの上側(誘電体板UA6aの下面UA61の直下)に供給される。 A gas supplier UD2 is connected to the gas chamber MA41, and the gas supplied from the gas supplier UD2 can be stored in the gas chamber MA41. A gas discharge groove MA43 is connected to the gas chamber MA41, and the gas stored in the gas chamber MA41 is supplied to the upper side of the space SP (immediately below the lower surface UA61 of the dielectric plate UA6a) through the gas discharge groove MA43.
上部電極UA21aは、誘電体板UA6aの上方に設けられる。上部電極UA21aは、導波路壁UA1内に収容されている。上部電極UA21aは、導波路壁UA1の天井部の下に配置されており、導波路壁UA1の側部によって囲まれている。 The upper electrode UA21a is provided above the dielectric plate UA6a. The upper electrode UA21a is accommodated within the waveguide wall UA1. The upper electrode UA21a is arranged under the ceiling of the waveguide wall UA1 and is surrounded by the sides of the waveguide wall UA1.
上部電極UA21aは、ステージMA11の上面MA13の上方において、処理容器CS内の空間SPと誘電体板UA6aとを介して設けられる。上部電極UA21aは、整合器UC2を介して高周波電源UC1に電気的に接続される。 The upper electrode UA21a is provided above the upper surface MA13 of the stage MA11 via the space SP in the processing container CS and the dielectric plate UA6a. The upper electrode UA21a is electrically connected to a high frequency power supply UC1 via a matching box UC2.
上部電極UA21aの材料は、アルミニウム又はアルミニウム合金等の導電性の材料であり得る。上部電極UA21aの表面上には、耐腐食性を有する膜が形成される。耐腐食性を有する膜は、酸化アルミニウム膜、酸化イットリウム膜、または酸化アルミニウムや酸化イットリウム等を含むセラミック膜であり得る。 The material of the upper electrode UA21a can be a conductive material such as aluminum or aluminum alloy. A corrosion-resistant film is formed on the surface of the upper electrode UA21a. The corrosion-resistant film can be an aluminum oxide film, a yttrium oxide film, or a ceramic film containing aluminum oxide, yttrium oxide, or the like.
誘電体板UA6aは、誘電体カバーであり、空間SP内において上部電極UA21aの直下に設けられる。誘電体板UA6aは、ステージMA11の上面MA13の上方に処理容器CS内の空間SPを介して設けられる。 The dielectric plate UA6a is a dielectric cover and is provided directly below the upper electrode UA21a within the space SP. The dielectric plate UA6a is provided above the upper surface MA13 of the stage MA11 via a space SP within the processing container CS.
誘電体板UA6aの端部は、絶縁部材UA4によって上部電極UA21aの端部(外周部UA24)に密着される。この誘電体板UA6aの端部は、弾性部材DA14を介して上部電極UA21aに接続されると共に、封止部材UA83を介して絶縁部材UA4に接続される。封止部材UA83は、真空シール用の部材であり、例えばOリングであり得る。封止部材UA83によて、誘電体板UA6aの上部のガスが空間SPに漏洩することが回避され得る。 An end portion of the dielectric plate UA6a is brought into close contact with an end portion (outer peripheral portion UA24) of the upper electrode UA21a by an insulating member UA4. An end portion of the dielectric plate UA6a is connected to the upper electrode UA21a via the elastic member DA14 and is connected to the insulating member UA4 via the sealing member UA83. The sealing member UA83 is a member for vacuum sealing, and may be an O-ring, for example. The sealing member UA83 can prevent the gas above the dielectric plate UA6a from leaking into the space SP.
弾性部材DA14は、Oリング等であり得る。誘電体板UA6aは、空間SPを介してステージMA11の上面MA13に対面している。誘電体板UA6aの中心軸線は、軸線AXに略一致している。 The elastic member DA14 may be an O-ring or the like. Dielectric plate UA6a faces upper surface MA13 of stage MA11 via space SP. The central axis of the dielectric plate UA6a substantially coincides with the axis AX.
誘電体板UA6aは、可撓性を有している。誘電体板UA6aは、窒化アルミニウム、酸化アルミニウム、酸化イットリウム、又は窒化アルミニウム、酸化アルミニウム、酸化イットリウム等を含む誘電体から形成されている。誘電体板UA6aの表面(特に下面UA61)には、耐腐食性を有する膜が形成されていてもよい。耐腐食性を有する膜は、酸化イットリウム膜、酸化フッ化イットリウム膜、フッ化イットリウム膜、又は酸化イットリウム、フッ化イットリウム等を含むセラミック膜であり得る。誘電体板UA6aの厚みは、略均一であり得る。 The dielectric plate UA6a has flexibility. The dielectric plate UA6a is made of aluminum nitride, aluminum oxide, yttrium oxide, or a dielectric containing aluminum nitride, aluminum oxide, yttrium oxide, or the like. A corrosion-resistant film may be formed on the surface of the dielectric plate UA6a (in particular, the lower surface UA61). The corrosion-resistant film can be a yttrium oxide film, a yttrium oxide fluoride film, a yttrium fluoride film, or a ceramic film including yttrium oxide, yttrium fluoride, or the like. The thickness of the dielectric plate UA6a can be substantially uniform.
誘電体板UA6aは、略円盤形状を有している。誘電体板UA6aの下面とステージMA11の上面MA13との間の鉛直方向における距離(空間SPの幅)は、例えば5[cm]以上且つ10[cm]以下であり得る。絶縁部材UA4は、誘電体板UA6aを上部電極UA21aに密着させる。 The dielectric plate UA6a has a substantially disk shape. The vertical distance (the width of the space SP) between the lower surface of the dielectric plate UA6a and the upper surface MA13 of the stage MA11 can be, for example, 5 [cm] or more and 10 [cm] or less. The insulating member UA4 brings the dielectric plate UA6a into close contact with the upper electrode UA21a.
空隙UB1は、上部電極UA21aと誘電体板UA6aとの離間によって形成される。より具体的に、空隙UB1は、上部電極UA21aの下面UAfと誘電体板UA6aの上面UAgとの間の空間であり、下面UAfと上面UAgとによって画定される。絶縁部材UA4によって誘電体板UA6aの端部が上部電極UA21aの端部(外周部UA24)に密着される状態において、上部電極UA21aと誘電体板UA6aとは、軸線AXにおいて最も大きく離間し得る。 The air gap UB1 is formed by the separation between the upper electrode UA21a and the dielectric plate UA6a. More specifically, the air gap UB1 is a space between the lower surface UAf of the upper electrode UA21a and the upper surface UAg of the dielectric plate UA6a, and is defined by the lower surface UAf and the upper surface UAg. In a state in which the edge of the dielectric plate UA6a is in close contact with the edge of the upper electrode UA21a (outer peripheral portion UA24) by the insulating member UA4, the upper electrode UA21a and the dielectric plate UA6a can be separated from each other the most along the axis AX.
空隙UB1には外部のガス供給部UC3に接続されたガス配管UC31が接続されており、空隙UB1はガス配管UC31に連通している。空隙UB1には、ガス配管UC31を介してガス供給部UC3から供給されるガスが流入する。このガスの流入で空隙UB1内の圧力が調整されることによって、空隙UB1の幅(上部電極UA21aの下面UAfと誘電体板UA6の上面UAgとの間の長さ)が調整され得る。 A gas pipe UC31 connected to an external gas supply unit UC3 is connected to the gap UB1, and the gap UB1 communicates with the gas pipe UC31. Gas supplied from the gas supply unit UC3 flows into the gap UB1 through the gas pipe UC31. The inflow of gas adjusts the pressure in the air gap UB1, thereby adjusting the width of the air gap UB1 (the length between the lower surface UAf of the upper electrode UA21a and the upper surface UAg of the dielectric plate UA6).
プラズマ処理装置1CのステージMA11は、プラズマ処理装置1BのステージMA11と同様の構成を有する。
Stage MA11 of
一実施形態において、プラズマ処理装置1Cは、プラズマ遮蔽板MB2を更に備えていてもよい。プラズマ遮蔽板MB2は、ステージMA11と側壁DA11との間で延在している。プラズマ遮蔽板MB2は、略環状の板材である。プラズマ遮蔽板MB2の材料は、例えば、酸化アルミニウム、石英等であり得る。
In one embodiment, the
プラズマ遮蔽板MB2の一方の周縁(外径)は、側壁DA11に接続される。プラズマ遮蔽板MB2の他方の周縁(内径)とステージMA11(更にはステージMA11の上面MA13に載置される基板W)との間には、隙間が設けられる。空間SP内のガスが、この隙間からステージMA11の下の空間を流れ、更に、排気口DA11aを介して外部に排出され得る。 One peripheral edge (outer diameter) of the plasma shielding plate MB2 is connected to the side wall DA11. A gap is provided between the other peripheral edge (inner diameter) of the plasma shielding plate MB2 and the stage MA11 (furthermore, the substrate W placed on the upper surface MA13 of the stage MA11). The gas in the space SP flows through this gap through the space below the stage MA11, and can be discharged to the outside through the exhaust port DA11a.
プラズマ処理装置1Cでは、プラズマ遮蔽板MB2の上側で延在する処理容器CSの内壁面(例えば側壁DA11の内壁面)の面積は、空間SP側の誘電体板UA6の表面積に略等しい。即ち、空間SPを画定する面のうちグランド電位に設定された面(グランド面)の面積は、空間SPを画定する面のうち誘電体板UA6aによって提供される面の面積と略同一である。かかる構成により、プラズマが、誘電体板UA6aの直下の領域及びグランド面の周囲の領域で均一な密度で生成される。その結果、基板Wのプラズマ処理の面内均一性が向上される。
In the
プラズマ処理装置1Cにおいて、高周波は、導波路UA31の端部UA32から軸線AXに向けて空間SP内に導入される。高周波が空間SPに導入されると、ガスが空間SP内で励起されて、当該ガスからプラズマが生成される。プラズマは、空間SP内で周方向において均一な密度分布で生成される。ステージMA11上の基板Wは、プラズマからの化学種によって処理される。
In the
次に、空隙UB1の形状の具体例について説明する。空隙UB1の形状は、上記したように、下面UAfと上面UAgとによって画定される。下面UAfの形状は、図1、図2及び図6のそれぞれに示すように、一例として、比較的に滑らかな上に凸の曲面であり得る。 Next, a specific example of the shape of the gap UB1 will be described. The shape of the air gap UB1 is defined by the lower surface UAf and the upper surface UAg, as described above. As shown in FIGS. 1, 2, and 6, the shape of the lower surface UAf may be, for example, a relatively smooth upwardly convex curved surface.
下面UAfの他の形状は、例えば、波状の曲面(波打つ形状の曲面)、又は、階段状の面、等であり得る(図1,2,6の各々に示す上部電極UA21aに適用され得る)。この場合、下面UAfの波状の形状は、プラズマシースの非線形な電流電圧特性により生じる高調波による影響を低減し得る形状に調整され得る。下面UAfの波状の形状は、一具体例として図7に示す下面UAfの形状であり得る。また、下面UAfの階段状の形状は、上部電極UA21の下面UAfを曲面に加工することを回避するために、有効であり得る。 Other shapes of the lower surface UAf may be, for example, a wavy curved surface (wave-shaped curved surface), a stepped surface, or the like (applicable to the upper electrode UA21a shown in each of FIGS. 1, 2, and 6). . In this case, the wavy shape of the lower surface UAf can be adjusted to a shape that can reduce the influence of harmonics caused by nonlinear current-voltage characteristics of the plasma sheath. The wavy shape of the lower surface UAf may be the shape of the lower surface UAf shown in FIG. 7 as a specific example. Further, the stepped shape of the lower surface UAf can be effective in order to avoid processing the lower surface UAf of the upper electrode UA21 into a curved surface.
図7に示すように、上部電極UA21は、下部層UA211を備えてもよい。下部層UA211は、上部電極UA21の下面UAfを備える。下部層UA211は、上部電極UA21において着脱が自在であり、複数の下面UAfの形状の各々に応じて用意することができる。プラズマ励起条件によって下面UAfの好適な断面形状が異なる場合があるが、プラズマ励起条件に応じて上部電極UA21の全体を交換することは高コストとなり交換に要する労力等も多くなり得る。この点、プラズマ励起条件に応じて所望とする形状の下面UAfを有する下部層UA211を上部電極UA21に装着することができるので、交換に必要なコスト・労力が低減され得る。 As shown in FIG. 7, the upper electrode UA21 may comprise a lower layer UA211. The lower layer UA211 comprises the lower surface UAf of the upper electrode UA21. The lower layer UA211 is detachable from the upper electrode UA21, and can be prepared according to the shape of each of the plurality of lower surfaces UAf. Although the preferred cross-sectional shape of the lower surface UAf may differ depending on the plasma excitation conditions, replacing the entire upper electrode UA21 according to the plasma excitation conditions can be costly and labor-intensive. In this regard, since the lower layer UA211 having the desired shape of the lower surface UAf can be attached to the upper electrode UA21 according to the plasma excitation conditions, the cost and labor required for replacement can be reduced.
空隙UB1の形状の他の具体例を図8及び図9に示す。図8及び図9のそれぞれに示す空隙UB1の具体例は、図1に示すプラズマ処理装置1A、図6に示すプラズマ処理装置1Cの各々の空隙UB1に適用され得る。
Another specific example of the shape of the air gap UB1 is shown in FIGS. Specific examples of the gap UB1 shown in FIGS. 8 and 9 can be applied to the gap UB1 of each of the
図8に示す空隙UB1の幅は、上部電極UA21及び誘電体板UA6のそれぞれの端部から中心部(軸線AXに交差する部分)に向けて増加する。図8に示す空隙UB1の幅は、上部電極UA21及び誘電体板UA6の中心部で最も大きい。 The width of the air gap UB1 shown in FIG. 8 increases from the respective ends of the upper electrode UA21 and the dielectric plate UA6 toward the central portion (the portion intersecting the axis AX). The width of the air gap UB1 shown in FIG. 8 is the largest at the central portion of the upper electrode UA21 and the dielectric plate UA6.
図1,2,6,7の各々に示す構成は、表面波(電波)の周波数がVHF帯にあり、この表面波の波長の1/4が誘電体板UA6の表面(上面UAgの反対側の面)の半径よりも大きい場合に、好適に用いられ得る。この表面波は、上記したように、プラズマの生成時に上部電極UA21と空間SP内で生じるプラズマとの間を伝搬する電波である。 1, 2, 6 and 7, the frequency of the surface wave (radio wave) is in the VHF band, and 1/4 of the wavelength of this surface wave is on the surface of the dielectric plate UA6 (opposite side of the top surface UAg). surface) can be suitably used. This surface wave is, as described above, an electric wave propagating between the upper electrode UA21 and the plasma generated within the space SP when the plasma is generated.
上記したように、図8に示す空隙UB1の幅は上部電極UA21及び誘電体板UA6のそれぞれの端部から中心部(軸線AXに交差する部分)に向けて増加する。このため、表面波による定在波の生成が抑制され、プラズマ生成時に誘電体板UA6と空間SP内で生じるプラズマとの間に生じる高周波電圧の増大(不均一性)が抑制され得る。 As described above, the width of the air gap UB1 shown in FIG. 8 increases from the respective ends of the upper electrode UA21 and the dielectric plate UA6 toward the center (the portion intersecting the axis AX). Therefore, the generation of standing waves due to surface waves is suppressed, and the increase (non-uniformity) of the high-frequency voltage generated between the dielectric plate UA6 and the plasma generated in the space SP during plasma generation can be suppressed.
また、空隙UB1の他の具体例では、空隙UB1の幅(下面UAfと上面UAgとの間の距離)は、誘電体板UA6の端部から軸線AXの近傍に至るまでの第1領域で略一定であり軸線AXの近傍の第2領域では第1領域との境界から軸線AXに向けて増加し得る。このように上記第2領域において空隙UB1の厚みが比較的に大きい場合、表面波の伝搬が抑制されて軸線AXの近傍(中央部)における表面波の集中も抑制され得る。このような空隙UB1の例は、図1,6の各々に示す空隙UB1に適用され得る。 In another specific example of the air gap UB1, the width of the air gap UB1 (the distance between the lower surface UAf and the upper surface UAg) is approximately It is constant and can increase from the boundary with the first region toward the axis AX in the second region near the axis AX. Thus, when the thickness of the air gap UB1 is relatively large in the second region, the propagation of the surface wave is suppressed, and the concentration of the surface wave in the vicinity (central portion) of the axis AX can also be suppressed. Examples of such an air gap UB1 can be applied to the air gap UB1 shown in each of FIGS.
図9に示す空隙UB1は、上部電極UA21に代えて上部電極UA21bを用いて画定される。上部電極UA21bは、誘電体板UA6の上方に設けられる。 The air gap UB1 shown in FIG. 9 is defined using an upper electrode UA21b instead of the upper electrode UA21. The upper electrode UA21b is provided above the dielectric plate UA6.
上部電極UA21bでは、軸線AXが交差する下面UAfの中央部に空隙UA23が設けられており、空隙UA23に絶縁体部UA23aが充填される。上部電極UA21bは、複数のガス吐出孔UA22aを備える。 In the upper electrode UA21b, a gap UA23 is provided in the central portion of the lower surface UAf intersected by the axis AX, and the gap UA23 is filled with an insulator portion UA23a. The upper electrode UA21b has a plurality of gas ejection holes UA22a.
上部電極UA21bの材料は、上部電極UA21の材料と同様であり得る。絶縁体部UA23aの材料は、窒化アルミニウム、酸化アルミニウム等の絶縁性の材料であり得る。上部電極UA21bの表面上には、耐腐食性を有する膜が形成される。耐腐食性を有する膜は、酸化アルミニウム膜、酸化イットリウム膜、または酸化アルミニウムや酸化イットリウム等を含むセラミック膜であり得る。 The material of the upper electrode UA21b can be similar to the material of the upper electrode UA21. The material of the insulator part UA23a can be an insulating material such as aluminum nitride or aluminum oxide. A corrosion-resistant film is formed on the surface of the upper electrode UA21b. The corrosion-resistant film can be an aluminum oxide film, a yttrium oxide film, or a ceramic film containing aluminum oxide, yttrium oxide, or the like.
図9に示す空隙UB1の幅は、上部電極UA21b及び誘電体板UA6のそれぞれの端部から中心部(軸線AXに交差する部分)に向けて減少する。図9に示す空隙UB1の幅は、上部電極UA21b及び誘電体板UA6の端部の側で最も大きい。 The width of the air gap UB1 shown in FIG. 9 decreases from the respective ends of the upper electrode UA21b and the dielectric plate UA6 toward the central portion (the portion intersecting the axis AX). The width of the air gap UB1 shown in FIG. 9 is the largest on the edge side of the upper electrode UA21b and the dielectric plate UA6.
図9に示す空隙UB1は、表面波(電波)の周波数がVHF帯からUHF帯にあり、この表面波の波長の1/4が誘電体板UA6の表面(上面UAgの反対側の面)の半径よりも小さい場合に、好適に用いられ得る。 In the air gap UB1 shown in FIG. 9, the frequency of surface waves (radio waves) is in the VHF band to the UHF band, and 1/4 of the wavelength of the surface waves is on the surface of the dielectric plate UA6 (the surface opposite to the top surface UAg). It can be preferably used when it is smaller than the radius.
上記したように図9に示す空隙UB1の幅は上部電極UA21b及び誘電体板UA6のそれぞれの端部から中心部(軸線AXに交差する部分)に向けて減少する。このため、プラズマ生成時に誘電体板UA6と空間SP内で生じるプラズマとの間を伝搬する表面波(電波)の減衰が抑制される。 As described above, the width of the air gap UB1 shown in FIG. 9 decreases from the ends of the upper electrode UA21b and the dielectric plate UA6 toward the center (the portion intersecting the axis AX). Therefore, attenuation of surface waves (radio waves) propagating between the dielectric plate UA6 and the plasma generated in the space SP during plasma generation is suppressed.
また、図9に示す空隙UB1の幅は、上部電極UA21及び誘電体板UA6の中央部で最も小さい。このため、プラズマ生成時に誘電体板UA6と空間SP内で生じるプラズマとの間に生じる電位の減少が抑制され得る。なお、絶縁体部UA23aは、中央部における表面波の集中と空隙UB1における放電とを防止する機能を有し得る。 Also, the width of the air gap UB1 shown in FIG. 9 is the smallest at the central portion of the upper electrode UA21 and the dielectric plate UA6. Therefore, it is possible to suppress the decrease in the potential generated between the dielectric plate UA6 and the plasma generated within the space SP during plasma generation. The insulator portion UA23a can have a function of preventing concentration of surface waves in the central portion and discharge in the air gap UB1.
図8に示す空隙UB1の形状、図9に示す空隙UB1の形状のうち何れの形状の空隙UB1を用いるかの選択は、表面波の波長λの1/4と誘電体板UA6の下面UA61の半径L(プラズマ励起エリアの半径)との大小に応じて決定され得る。上記の半径Lの下面UA61は、上面UAgの反対側にあり空間SP内で露出された面である。 8 or UB1 shown in FIG. 9 is determined by 1/4 of the wavelength .lambda. It can be determined according to the magnitude of the radius L (the radius of the plasma excitation area). The lower surface UA61 having the radius L is a surface on the opposite side of the upper surface UAg and exposed within the space SP.
表面波の波長λ[cm]は、空間SP内における下面UA61の近傍での電子密度ne[cm-3]の平方根に9.6を乗じて得た値を、プラズマ励起周波数f[MHz]の二乗で割って得られた値(商)に概ね等しい。この場合の波長λ[cm]は、一例として、空間SP内における下面UA61の近傍での3[eV]の電子温度と1×1011cm-3の電子密度とデバイ長の15倍の値のシース幅とを用いて算出された。 The wavelength λ [cm] of the surface wave is the value obtained by multiplying the square root of the electron density ne [cm −3 ] in the vicinity of the lower surface UA61 in the space SP by 9.6, and the plasma excitation frequency f [MHz]. Roughly equal to the value obtained by dividing by the square (quotient). The wavelength λ [cm] in this case is, for example, an electron temperature of 3 [eV] in the vicinity of the lower surface UA61 in the space SP, an electron density of 1×10 11 cm −3 , and a value 15 times the Debye length. It was calculated using the sheath width.
λ/4>Lの場合、軸線AXを腹とする表面波の定在波が生じやすく表面波の減衰が生じ難いので、図8に示す空隙UB1の形状が好適である。λ/4<Lの場合、表面波の減衰が生じ易いので、図9に示す空隙UB1の形状が好適である。 When λ/4>L, a standing wave of a surface wave having an antinode at the axis AX is likely to occur, and attenuation of the surface wave is difficult to occur. If λ/4<L, the surface wave is likely to be attenuated, so the shape of the air gap UB1 shown in FIG. 9 is suitable.
上記したλ[cm]は、f[MHz]の二乗に反比例しているので、f[MHz]が表面波の伝搬に及ぼす影響は比較的に大きい。従って、図8に示す空隙UB1の形状、図9に示す空隙UB1の形状の何れの形状を用いても、λ[cm]を調整することによってプラズマの径方向(軸線AXに交差する方向であり、誘電体板UA6の延びる方向)の分布を調整し得る。プラズマの径方向の分布を調整するために、f[MHz]を連続的に変えられるようにしても良いし、複数のf[MHz]を印加してそれらの電力比を変えられるようにしてもよい。 Since λ [cm] described above is inversely proportional to the square of f [MHz], the influence of f [MHz] on propagation of surface waves is relatively large. Therefore, regardless of the shape of the air gap UB1 shown in FIG. 8 or the shape of the air gap UB1 shown in FIG. , the direction in which the dielectric plate UA6 extends) can be adjusted. In order to adjust the radial distribution of the plasma, f [MHz] may be changed continuously, or a plurality of f [MHz] may be applied to change their power ratio. good.
以下、主に図10を参照する。上記したプラズマ処理装置1A及びプラズマ処理装置1Cのそれぞれは、ステージMA11に代えて、ステージMA111を備え得る。ステージMA111は、処理容器CS内に設けられる。
Mainly refer to FIG. 10 below. Each of the
ステージMA111は、ステージMA11と同様に本体MA11a及び導電層MA15を有している。導電層MA15は、本体MA11a内に設けられている。 The stage MA111 has a main body MA11a and a conductive layer MA15 like the stage MA11. The conductive layer MA15 is provided within the main body MA11a.
一実施形態において、導電層MA15は、ヒータ(抵抗加熱素子)であり得る。この実施形態では、導電層MA15は、例えば、プラズマ処理装置1Aの場合と同様にヒータ部材MA15a、ヒータ部材MA15bを備え得る。ヒータ部材MA15aは、ヒータ電源DB62aにコモンモードフィルタDB61aを介して電気的に接続される。ヒータ部材MA15bは、ヒータ電源DB62bにコモンモードフィルタDB61bを介して電気的に接続される。
In one embodiment, the conductive layer MA15 can be a heater (resistive heating element). In this embodiment, the conductive layer MA15 can include, for example, heater members MA15a and heater members MA15b as in the case of the
ステージMA111は、導電層MA16を更に備える。導電層MA16は、本体MA11a内に設けられている。導電層MA16には、直流電源DB63が電気的に接続される。 Stage MA111 further includes a conductive layer MA16. The conductive layer MA16 is provided within the main body MA11a. A DC power supply DB63 is electrically connected to the conductive layer MA16.
導電層MA15とステージMA111の上面MA13との間の距離は、導電層MA16とステージMA111の上面MA13との間の距離よりも大きい。即ち、導電層MA16とステージMA111の上面MA13との距離は、ステージMA111の複数の導電層のそれぞれと上面MA13との距離のうち、最短の距離である。 The distance between the conductive layer MA15 and the top surface MA13 of the stage MA111 is greater than the distance between the conductive layer MA16 and the top surface MA13 of the stage MA111. That is, the distance between the conductive layer MA16 and the upper surface MA13 of the stage MA111 is the shortest distance among the distances between each of the plurality of conductive layers of the stage MA111 and the upper surface MA13.
導電層MA16は、本体MA11a内の環状の領域内に形成される。この環状の領域の中心軸線は、軸線AXに略一致する。この環状の領域の内径は、例えば基板Wの直径の1/6(50[mm])以上である。この環状の領域の外径は、基板Wの直径よりも小さい。導電層MA16は、メッシュ状に形成されていてもよい。 The conductive layer MA16 is formed in an annular region within the main body MA11a. The central axis of this annular region substantially coincides with the axis AX. The inner diameter of this annular region is, for example, 1/6 (50 [mm]) or more of the diameter of the substrate W. The outer diameter of this annular region is smaller than the diameter of the substrate W. The conductive layer MA16 may be formed in a mesh shape.
導電層MA16は、ステージMA111内に設けられた一つ以上の導電層のうちステージMA111の上面MA13から最短の距離を有している。導電層MA16は、ステージMA111上に載置される基板WとステージMA111との間で静電引力を発生させるための電極、高周波が供給される電極、及び接地される電極のうち何れかである。導電層MA16は、環状に形成される。 The conductive layer MA16 has the shortest distance from the upper surface MA13 of the stage MA111 among the one or more conductive layers provided in the stage MA111. The conductive layer MA16 is one of an electrode for generating electrostatic attraction between the substrate W placed on the stage MA111 and the stage MA111, an electrode supplied with high frequency, and an electrode grounded. . The conductive layer MA16 is formed in an annular shape.
本体MA11aの材料は、窒化アルミニウム、酸化アルミニウム等の絶縁体(誘電体)であり得る。導電層MA16の材料は、タングステン、モリブデン等の金属であり得る。 The material of the main body MA11a can be an insulator (dielectric) such as aluminum nitride or aluminum oxide. The material of the conductive layer MA16 can be a metal such as tungsten or molybdenum.
以下、主に図11を参照する。上記したプラズマ処理装置1Aは、バッフル部材MB1に代えてフォーカスリングMB3を備え、ステージMA11に代えてステージMA112を備え得る。上記したプラズマ処理装置1Cは、プラズマ遮蔽板MB2に代えてフォーカスリングMB3を備え、ステージMA11に代えてステージMA112を備え得る。
Mainly refer to FIG. 11 below. The
ステージMA112は、処理容器CS内に設けられる。ステージMA112は、本体MA11bを有する。 Stage MA112 is provided in processing container CS. Stage MA112 has a main body MA11b.
ステージMA112の材料は、アルミニウム又はアルミニウム合金等の金属であり得る。ステージMA112は、略円盤形状を有し得る。ステージMA112の中心軸線は、軸線AXに略一致している。 The material of stage MA112 can be a metal such as aluminum or an aluminum alloy. Stage MA112 may have a substantially disk shape. The central axis of stage MA112 substantially coincides with axis AX.
フォーカスリングMB3は、ステージMA112の上面MA13上に設けられている。フォーカスリングMB3は、上面MA13の周縁に沿って延びている。フォーカスリングMB3の内径は、ステージMA112の上面MA13の直径よりも小さい。 Focus ring MB3 is provided on upper surface MA13 of stage MA112. The focus ring MB3 extends along the periphery of the upper surface MA13. The inner diameter of focus ring MB3 is smaller than the diameter of upper surface MA13 of stage MA112.
ステージMA112の上面MA13は、基板載置領域MA131及びフォーカスリング搭載領域MA132を含んでいる。基板載置領域MA131は、略円形の領域である。基板Wは、基板載置領域MA131上に載置される。基板載置領域MA131の直径は、基板Wの直径よりも小さい。 The upper surface MA13 of the stage MA112 includes a substrate mounting area MA131 and a focus ring mounting area MA132. The substrate mounting area MA131 is a substantially circular area. The substrate W is mounted on the substrate mounting area MA131. The diameter of the substrate mounting area MA131 is smaller than the diameter of the substrate W.
フォーカスリング搭載領域MA132は、基板載置領域MA131の外側で径方向に延在している。フォーカスリング搭載領域MA132の鉛直方向の位置は、基板載置領域MA131の鉛直方向の位置のよりも低い。 The focus ring mounting area MA132 extends radially outside the substrate mounting area MA131. The vertical position of the focus ring mounting area MA132 is lower than the vertical position of the substrate mounting area MA131.
フォーカスリング搭載領域MA132上には、フォーカスリングMB3が搭載される。フォーカスリングMB3は、略環形状を有しており、板状を成す。 A focus ring MB3 is mounted on the focus ring mounting area MA132. The focus ring MB3 has a substantially annular shape and is plate-like.
フォーカスリングMB3の材料は、酸化アルミニウム又は石英等であり得る。フォーカスリングMB3は、その内縁の上面が基板Wのエッジの下面に面するように、フォーカスリング搭載領域MA132上に搭載される。 The material of the focus ring MB3 can be aluminum oxide, quartz, or the like. The focus ring MB3 is mounted on the focus ring mounting area MA132 so that the upper surface of its inner edge faces the lower surface of the substrate W edge.
ステージMA112によれば、フォーカスリングMB3によってステージMA112の中央部と外周部との間での高周波電界の発生がフォーカスリングMB3によって抑制される。 According to the stage MA112, the focus ring MB3 suppresses the generation of the high-frequency electric field between the central portion and the outer peripheral portion of the stage MA112.
上記の複数の例示的実施形態によれば、上部電極UA21、上部電極UA21a、上部電極UA21bと、プラズマの生成時に空間SP内で生じるプラズマ(プラズマ上方に設けられる誘電体板UA6、誘電体板UA6a)との間に、空隙UB1が設けられる。VHF帯又はUHF帯の高周波の場合には、定在波の発生によって、誘電体板UA6、誘電体板UA6aの下面UA61の延びる方向におけるプラズマの均一性が低減され得る。しかし、空隙UB1の存在によって、定在波の発生が抑制されて、空間SP内における上部電極UA21、上部電極UA21a、上部電極UA21b(より具体的に、誘電体板UA6、誘電体板UA6a)の近傍での電界の勾配が低減され得る。よって、プラズマの均一性が向上され得る。 According to the above multiple exemplary embodiments, the upper electrode UA21, the upper electrode UA21a, the upper electrode UA21b, and the plasma generated in the space SP when the plasma is generated (the dielectric plate UA6 provided above the plasma, the dielectric plate UA6a) ) is provided with an air gap UB1. In the case of high frequencies in the VHF band or UHF band, the generation of standing waves can reduce plasma uniformity in the direction in which the dielectric plate UA6 and the lower surface UA61 of the dielectric plate UA6a extend. However, the presence of the air gap UB1 suppresses the generation of the standing wave, and the upper electrode UA21, the upper electrode UA21a, and the upper electrode UA21b (more specifically, the dielectric plate UA6 and the dielectric plate UA6a) in the space SP. Electric field gradients in the vicinity can be reduced. Thus, plasma uniformity can be improved.
また、空隙UB1の幅(下面UAfと上面UAgとの間の距離)は、誘電体板UA6、誘電体板UA6aの延びる方向(空隙UB1が延びる方向)において、非一様であり得る。即ち、空隙UB1の幅は、定在波の発生が抑制されるように調整され得る。 Also, the width of the air gap UB1 (the distance between the lower surface UAf and the upper surface UAg) may be non-uniform in the direction in which the dielectric plates UA6 and UA6a extend (the direction in which the air gap UB1 extends). That is, the width of the air gap UB1 can be adjusted so as to suppress the generation of standing waves.
特に、VHF帯又はUHF帯の高周波が空間SP内に放射される場合において、空隙UB1の幅の調整が可能となる。この調整によって、プラズマの生成時に上部電極UA21、上部電極UA21a、上部電極UA21b(より具体的に、誘電体板UA6、誘電体板UA6a)と空間SP内で生じるプラズマとの間を伝搬する表面波(電波)の波長が好適に伸長され得る。よって、プラズマの均一性がより向上され得る。 In particular, the width of the air gap UB1 can be adjusted when high frequencies in the VHF band or UHF band are radiated into the space SP. By this adjustment, the surface wave propagating between the upper electrode UA21, the upper electrode UA21a, and the upper electrode UA21b (more specifically, the dielectric plate UA6 and the dielectric plate UA6a) and the plasma generated in the space SP when the plasma is generated The wavelength of (radio waves) can preferably be stretched. Therefore, plasma uniformity can be further improved.
また、空隙UB1は、誘電体ロッドUA7、誘電体ロッドUD15a9、誘電体ロッドUD15b7によって、より安定的に画定され得る。 Also, the air gap UB1 can be more stably defined by the dielectric rod UA7, the dielectric rod UD15a9, and the dielectric rod UD15b7.
また、プラズマからの入熱等により各部が熱膨張しても、誘電体板UA6の端部と上部電極UA21の端部とは、弾性部材UA81等を介した押圧によって、互いに接続されるので、誘電体板UA6が割れる等の不具合が回避され得る。 Further, even if each part thermally expands due to heat input from the plasma or the like, the end of the dielectric plate UA6 and the end of the upper electrode UA21 are connected to each other by pressing via the elastic member UA81 or the like. Problems such as cracking of the dielectric plate UA6 can be avoided.
また、空隙UB1の幅が、上部電極UA21、上部電極UA21a、誘電体板UA6、誘電体板UA6aのそれぞれの端部から中心部に向けて増加する場合に、表面波による定在波の生成が、回避され得る。 Also, when the width of the air gap UB1 increases from the ends toward the center of each of the upper electrode UA21, the upper electrode UA21a, the dielectric plate UA6, and the dielectric plate UA6a, the standing wave is generated by the surface wave. , can be avoided.
また、空隙UB1の幅が、上部電極UA21、上部電極UA21a、上部電極UA21b、誘電体板UA6、誘電体板UA6aのそれぞれの端部から中心部に向けて減少する場合に、表面波の減衰が抑制され得る。 Also, when the width of the air gap UB1 decreases from the ends toward the center of each of the upper electrode UA21, the upper electrode UA21a, the upper electrode UA21b, the dielectric plate UA6, and the dielectric plate UA6a, the attenuation of the surface wave is can be suppressed.
また、空隙UB1に露出する上部電極UA21、上部電極UA21aのそれぞれの下面UAfが波打つ形状を有する場合には、プラズマシースの非線形な電流電圧特性により生じる高調波による影響を低減し得る。 Further, when the lower surfaces UAf of the upper electrodes UA21 and UA21a exposed in the air gap UB1 have a wavy shape, it is possible to reduce the influence of harmonics caused by the nonlinear current-voltage characteristics of the plasma sheath.
また、誘電体ロッドUD15a9、誘電体ロッドUD15b7のそれぞれが移動することによって、空隙UB1の幅の詳細な調整が可能となる。 Further, by moving the dielectric rods UD15a9 and UD15b7, the width of the air gap UB1 can be finely adjusted.
また、誘電体板UA6はシャワープレートなので、空間SPへのガスの供給が誘電体板UA6の下面UA61から行える。 Further, since the dielectric plate UA6 is a shower plate, gas can be supplied to the space SP from the lower surface UA61 of the dielectric plate UA6.
また、複数のガス吐出孔UA22a及び複数のガス吐出孔UB2において互いに重なり合うガス吐出孔UA22a及びガス吐出孔UB2が設けられている。従って、上部電極UA21、上部電極UA21b及び誘電体板UA6から空間SP内へのガスの流れは良好となり得る。 Further, gas ejection holes UA22a and gas ejection holes UB2 are provided that overlap each other in the plurality of gas ejection holes UA22a and the plurality of gas ejection holes UB2. Therefore, the gas flow from the upper electrode UA21, the upper electrode UA21b, and the dielectric plate UA6 into the space SP can be improved.
また、特に図10に示す場合のように、ステージMA111内に設けられた一つ以上の導電層(導電層MA15、導電層MA16等)のうちステージMA111の上面MA13から最短の距離を有する導電層MA16は、環状に形成されている。従って、ステージMA111上に載置される基板Wに不均一にかかる高周波バイアスが、抑制され得る。 10, among the one or more conductive layers (conductive layer MA15, conductive layer MA16, etc.) provided in the stage MA111, the conductive layer having the shortest distance from the upper surface MA13 of the stage MA111 MA16 is formed in an annular shape. Therefore, the high-frequency bias applied unevenly to the substrate W placed on the stage MA111 can be suppressed.
プラズマ処理装置1A~1Cを用いたプラズマ処理方法について説明する。この方法は、上部電極UA21又は上部電極UA21aと誘電体板UA6又は誘電体板UA6aとの間に設けられた空隙UB1の幅が誘電体板UA6又は誘電体板UA6aの延びる方向において非一様となっている状態において、プラズマ処理を行う。
A plasma processing method using the
以上、種々の例示的実施形態について説明してきたが、上述した例示的実施形態に限定されることなく、様々な省略、置換、及び変更がなされてもよい。また、異なる例示的実施形態における要素を組み合わせて他の例示的実施形態を形成することが可能である。 While various exemplary embodiments have been described above, various omissions, substitutions, and modifications may be made without being limited to the exemplary embodiments described above. Also, elements from different exemplary embodiments can be combined to form other exemplary embodiments.
以上の説明から、本開示の種々の例示的実施形態は、説明の目的で本明細書で説明されており、本開示の範囲及び主旨から逸脱することなく種々の変更をなし得ることが、理解されるであろう。したがって、本明細書に開示した種々の例示的実施形態は限定することを意図しておらず、真の範囲と主旨は、添付の特許請求の範囲によって示される。 From the foregoing description, it will be appreciated that various exemplary embodiments of the present disclosure have been set forth herein for purposes of illustration, and that various changes may be made without departing from the scope and spirit of the present disclosure. will be done. Accordingly, the various exemplary embodiments disclosed herein are not intended to be limiting, with a true scope and spirit being indicated by the following claims.
1A…プラズマ処理装置、1B…プラズマ処理装置、1C…プラズマ処理装置、AX…軸線、CS…処理容器、DA10…弾性部材、DA11…側壁、DA11a…排気口、DA12…突起部、DA13…封止部材、DA14…弾性部材、DA2…入出口、DB11…支持部、DB12…排気管、DB21…ベローズ、DB22…ベローズ、DB3…ばね、DB4…水冷プレート、DB61a…コモンモードフィルタ、DB61b…コモンモードフィルタ、DB62a…ヒータ電源、DB62b…ヒータ電源、DB63…直流電源、MA11…ステージ、MA111…ステージ、MA112…ステージ、MA11a…本体、MA11b…本体、MA12…外周部、MA13…上面、MA131…基板載置領域、MA132…フォーカスリング搭載領域、MA14…裏面、MA15…導電層、MA15a…ヒータ部材、MA15b…ヒータ部材、MA16…導電層、MA21…導電部、MA22…導電板、MA23…導電性弾性部材、MA31…排気室、MA32…壁部、MA33…通気孔、MA41…ガス室、MA42…壁部、MA43…ガス放出溝、MB1…バッフル部材、MB2…プラズマ遮蔽板、MB3…フォーカスリング、SP…空間、UA1…導波路壁、UA21…上部電極、UA211…下部層、UA21a…上部電極、UA21b…上部電極、UA22…空洞、UA22a…ガス吐出孔、UA23…空隙、UA23a…絶縁体部、UA24…外周部、UA31…導波路、UA32…端部、UA4…絶縁部材、UA51…サポートリング、UA52…カバーリング、UA6…誘電体板、UA6a…誘電体板、UA61…下面、UA7…誘電体ロッド、UA81…弾性部材、UA82…封止部材、UA83…封止部材、UA9…管、UAf…下面、UAg…上面、UB1…空隙、UB2…ガス吐出孔、UC1…高周波電源、UC2…整合器、UC3…ガス供給部、UC31…ガス配管、UD10…駆動機構、UD11…モーター、UD12…絶縁シャフト、UD13…プーリー、UD14…ベルト、UD15a…駆動部、UD15a1…プーリー、UD15a2…調整ねじ、UD15a3…容器、UD15a4…シャフト、UD15a5…ばね、UD15a6…Oリング、UD15a7…メス部、UD15a8…オス部、UD15a9…誘電体ロッド、UD15b…駆動部、UD15b1…プーリー、UD15b2…調整ねじ、UD15b3…容器、UD15b4…ボール、UD15b5…シャフト、UD15b6…ベローズ、UD15b7…誘電体ロッド、UD2…ガス供給器。
1A...
Claims (17)
前記処理容器内に設けられたステージと、
前記ステージの上方に設けられた上部電極と、
前記上部電極の直下に設けられた誘電体板と、
VHF帯又はUHF帯の高周波を導波する導波路と、
プラズマ生成空間に向いて配置され、該プラズマ生成空間に高周波を放射する前記導波路の端部と、
前記上部電極と前記誘電体板との間に配置された誘電体ロッドと、
前記上部電極の下面に交差する基準方向に前記誘電体ロッドを移動させる駆動機構と、
を備え、
前記上部電極と前記誘電体板との間には、空隙が設けられ、
前記上部電極の前記下面は、前記空隙に露出しており、
前記空隙の幅は、前記誘電体板の延びる方向において、非一様であり、
前記空隙は、前記誘電体ロッドによって維持され、
前記誘電体ロッドは、前記誘電体板に接続又は接合される、或いは、該誘電体板と一体に形成される、
プラズマ処理装置。 a processing vessel;
a stage provided in the processing container;
an upper electrode provided above the stage;
a dielectric plate provided immediately below the upper electrode;
a waveguide that guides high frequencies in the VHF band or UHF band;
an end of the waveguide disposed facing the plasma generation space and radiating high frequency waves into the plasma generation space;
a dielectric rod disposed between the upper electrode and the dielectric plate;
a driving mechanism for moving the dielectric rod in a reference direction intersecting the lower surface of the upper electrode;
with
A gap is provided between the upper electrode and the dielectric plate,
the lower surface of the upper electrode is exposed to the gap,
the width of the gap is non-uniform in the extending direction of the dielectric plate;
the air gap is maintained by the dielectric rod;
the dielectric rod is connected or joined to the dielectric plate, or formed integrally with the dielectric plate ;
Plasma processing equipment.
請求項1に記載のプラズマ処理装置。 the end of the dielectric plate and the end of the upper electrode are connected to each other by pressing via an elastic member;
The plasma processing apparatus according to claim 1.
請求項1又は請求項2に記載のプラズマ処理装置。 the width of the gap increases from the edge to the center of each of the upper electrode and the dielectric plate;
3. The plasma processing apparatus according to claim 1 or 2.
請求項1又は請求項2に記載のプラズマ処理装置。 the width of the air gap decreases from the edge to the center of each of the upper electrode and the dielectric plate;
3. The plasma processing apparatus according to claim 1 or 2.
請求項1~4の何れか一項に記載のプラズマ処理装置。 the lower surface of the upper electrode exposed in the gap has a wavy shape;
The plasma processing apparatus according to any one of claims 1-4.
請求項1に記載のプラズマ処理装置。 The drive mechanism drives the dielectric rod in the reference direction to expand or contract the width of the gap.
The plasma processing apparatus according to claim 1 .
前記モーターは、前記上部電極上に設けられ、
前記第1プーリーと前記ベルトと前記駆動部とは、前記上部電極内に設けられ、
前記絶縁シャフトは、前記モーターに連結し、
前記第1プーリーは、前記絶縁シャフトと前記ベルトとを連結し、
前記駆動部は、前記誘電体ロッドと前記ベルトとを連結し、前記絶縁シャフト及び該ベルトを介して伝達される前記モーターの動力を用いて前記基準方向に該誘電体ロッドを駆動し、
前記駆動部は、第2プーリーとシャフトとを備え、
前記第2プーリーは、前記ベルトと前記シャフトとを連結し、
前記シャフトは、前記誘電体ロッドにフローティングジョイントを介して連結する、
請求項6に記載のプラズマ処理装置。 The drive mechanism comprises a motor, a first pulley, an insulating shaft, a belt and a drive,
The motor is provided on the upper electrode,
the first pulley, the belt, and the drive unit are provided in the upper electrode;
the insulated shaft is connected to the motor;
the first pulley connects the insulating shaft and the belt,
The driving unit connects the dielectric rod and the belt, and drives the dielectric rod in the reference direction using power of the motor transmitted through the insulating shaft and the belt,
the drive unit comprises a second pulley and a shaft;
the second pulley connects the belt and the shaft;
the shaft is connected to the dielectric rod via a floating joint;
The plasma processing apparatus according to claim 6 .
請求項1に記載のプラズマ処理装置。 The drive mechanism moves the dielectric rod along the reference direction so as to separate the upper electrode and the dielectric plate, thereby widening the gap.
The plasma processing apparatus according to claim 1 .
前記モーターは、前記上部電極上に設けられ、
前記第1プーリーと前記ベルトと前記駆動部とは、前記上部電極内に設けられ、
前記絶縁シャフトは、前記モーターに連結し、
前記第1プーリーは、前記絶縁シャフトと前記ベルトとを連結し、
前記駆動部は、前記誘電体ロッドと前記ベルトとを連結し、前記絶縁シャフト及び該ベルトを介して伝達される前記モーターの動力を用いて前記基準方向に該誘電体ロッドを駆動し、
前記駆動部は、第2プーリーとシャフトとを備え、
前記第2プーリーは、前記ベルトを前記シャフトに連結し、
前記シャフトは、前記誘電体ロッドに連結する、
請求項8に記載のプラズマ処理装置。 The drive mechanism comprises a motor, a first pulley, an insulating shaft, a belt and a drive,
The motor is provided on the upper electrode,
the first pulley, the belt, and the drive unit are provided in the upper electrode;
the insulated shaft is connected to the motor;
the first pulley connects the insulating shaft and the belt,
The driving unit connects the dielectric rod and the belt, and drives the dielectric rod in the reference direction using power of the motor transmitted through the insulating shaft and the belt,
the drive unit comprises a second pulley and a shaft;
the second pulley connects the belt to the shaft;
the shaft connects to the dielectric rod;
The plasma processing apparatus according to claim 8 .
請求項1~9の何れか一項に記載のプラズマ処理装置。 The dielectric plate is a shower plate,
The plasma processing apparatus according to any one of claims 1-9 .
前記誘電体板は、複数の第2ガス吐出孔を有し、
複数の前記第1ガス吐出孔と、複数の前記第2ガス吐出孔とは、前記空隙を介して連通し、
少なくとも複数の前記第1ガス吐出孔の一部と複数の前記第2ガス吐出孔の一部とは、互いに重なるように設けられる、
請求項10に記載のプラズマ処理装置。 the upper electrode has a plurality of first gas ejection holes,
the dielectric plate has a plurality of second gas ejection holes,
the plurality of first gas ejection holes and the plurality of second gas ejection holes communicate with each other through the gap,
at least a portion of the plurality of first gas ejection holes and a portion of the plurality of second gas ejection holes are provided so as to overlap each other;
The plasma processing apparatus according to claim 10 .
請求項1~9の何れか一項に記載のプラズマ処理装置。 The gap communicates with a gas pipe connected to an external gas supply,
The plasma processing apparatus according to any one of claims 1-9 .
絶縁体から形成された本体と、
前記本体内に設けられた導電層と、
を含み、
前記導電層は、前記ステージ内に設けられた一つ以上の導電層のうち該ステージの上面から最短の距離を有し、環状に形成される、
請求項1~12の何れか一項に記載のプラズマ処理装置。 The stage is
a body formed from an insulator;
a conductive layer provided within the body;
including
The conductive layer has the shortest distance from the top surface of the stage among the one or more conductive layers provided in the stage and is formed in a ring shape.
The plasma processing apparatus according to any one of claims 1-12 .
請求項13に記載のプラズマ処理装置。 The conductive layer has an outer diameter smaller than the diameter of the substrate placed on the stage,
The plasma processing apparatus according to claim 13 .
請求項13又は請求項14に記載のプラズマ処理装置。 The conductive layer is any one of an electrode for generating electrostatic attraction between a substrate placed on the stage and the stage, an electrode to which a high frequency is supplied, and an electrode to be grounded.
15. The plasma processing apparatus according to claim 13 or 14 .
請求項13~15の何れか一項に記載のプラズマ処理装置。 The conductive layer is formed in a mesh shape,
The plasma processing apparatus according to any one of claims 13-15 .
前記誘電体ロッドによって維持される前記空隙の幅が該誘電体板の延びる方向において非一様となっている状態において、プラズマ処理を行う、
プラズマ処理方法。 A plasma processing method for performing plasma processing on an object to be processed using a plasma processing apparatus, the plasma processing apparatus comprising a processing container, an upper electrode, a dielectric plate, a waveguide, a stage , a dielectric rod , and a driving mechanism. , the stage is provided in the processing container, the upper electrode is provided above the stage, the dielectric plate is provided directly below the upper electrode, and the waveguide is in the VHF band used for plasma processing or A high frequency wave in the UHF band is guided, an end of the waveguide is arranged to face the plasma generating space and radiates the high frequency wave to the plasma generating space, and the dielectric rod is between the upper electrode and the dielectric plate. the drive mechanism moves the dielectric rod in a reference direction crossing the lower surface of the upper electrode, a gap is provided between the upper electrode and the dielectric plate, and the a bottom surface exposed to the air gap and the dielectric rod connected or bonded to the dielectric plate or integrally formed with the dielectric plate, the method comprising:
performing plasma treatment in a state in which the width of the air gap maintained by the dielectric rod is non-uniform in the extending direction of the dielectric plate;
Plasma treatment method.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022123459A JP7308498B2 (en) | 2018-12-06 | 2022-08-02 | Plasma processing apparatus and plasma processing method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018229232A JP7125058B2 (en) | 2018-12-06 | 2018-12-06 | Plasma processing apparatus and plasma processing method |
| JP2022123459A JP7308498B2 (en) | 2018-12-06 | 2022-08-02 | Plasma processing apparatus and plasma processing method |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018229232A Division JP7125058B2 (en) | 2018-12-06 | 2018-12-06 | Plasma processing apparatus and plasma processing method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022140639A JP2022140639A (en) | 2022-09-26 |
| JP7308498B2 true JP7308498B2 (en) | 2023-07-14 |
Family
ID=87103409
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022123459A Active JP7308498B2 (en) | 2018-12-06 | 2022-08-02 | Plasma processing apparatus and plasma processing method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7308498B2 (en) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050241583A1 (en) | 2004-04-30 | 2005-11-03 | Arthur Buechel | Method for the production of a disk-form workpiece based on a dielectric substrate as well as vacuum treatment installation for same |
| JP2007535789A (en) | 2004-04-30 | 2007-12-06 | オー・ツェー・エリコン・バルザース・アクチェンゲゼルシャフト | Method for manufacturing a disk-shaped workpiece based on a dielectric substrate, and vacuum processing equipment therefor |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3595853B2 (en) * | 1999-03-18 | 2004-12-02 | 日本エー・エス・エム株式会社 | Plasma CVD film forming equipment |
| US6228438B1 (en) * | 1999-08-10 | 2001-05-08 | Unakis Balzers Aktiengesellschaft | Plasma reactor for the treatment of large size substrates |
| JP2001185542A (en) * | 1999-12-27 | 2001-07-06 | Hitachi Ltd | Plasma processor and plasma processing method using the same |
| WO2005024891A2 (en) * | 2003-09-10 | 2005-03-17 | Unaxis Balzers Ag | Voltage non-uniformity compensation method for high frequency plasma reactor for the treatment of rectangular large area substrates |
| CN101919022B (en) * | 2007-10-01 | 2012-12-05 | 欧瑞康太阳能股份公司(特吕巴赫) | Deposition of active films |
| JP5597456B2 (en) * | 2010-06-29 | 2014-10-01 | 東京エレクトロン株式会社 | Dielectric thickness setting method and substrate processing apparatus provided with dielectric provided on electrode |
| US9123661B2 (en) * | 2013-08-07 | 2015-09-01 | Lam Research Corporation | Silicon containing confinement ring for plasma processing apparatus and method of forming thereof |
-
2022
- 2022-08-02 JP JP2022123459A patent/JP7308498B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050241583A1 (en) | 2004-04-30 | 2005-11-03 | Arthur Buechel | Method for the production of a disk-form workpiece based on a dielectric substrate as well as vacuum treatment installation for same |
| JP2007535789A (en) | 2004-04-30 | 2007-12-06 | オー・ツェー・エリコン・バルザース・アクチェンゲゼルシャフト | Method for manufacturing a disk-shaped workpiece based on a dielectric substrate, and vacuum processing equipment therefor |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022140639A (en) | 2022-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7162837B2 (en) | Plasma processing apparatus and plasma processing method | |
| KR101751200B1 (en) | Microwave radiation antenna, microwave plasma source and plasma processing apparatus | |
| JP7184254B2 (en) | Plasma processing apparatus and plasma processing method | |
| JP7264576B2 (en) | Ultra-localization and plasma uniformity control in manufacturing processes | |
| CN109982500B (en) | Microwave plasma processing apparatus | |
| JP2014160557A (en) | Plasma processing apparatus | |
| KR102531442B1 (en) | plasma processing unit | |
| JP7308498B2 (en) | Plasma processing apparatus and plasma processing method | |
| KR102605240B1 (en) | Plasma processing device and plasma processing method | |
| JP7125058B2 (en) | Plasma processing apparatus and plasma processing method | |
| JP7141061B2 (en) | Plasma processing apparatus and plasma processing method | |
| KR102491984B1 (en) | Antenna, plasma processing device and plasma processing method | |
| JP2010277969A (en) | Plasma processing device and power feeding method for the plasma processing device | |
| WO2020116256A1 (en) | Plasma processing apparatus and plasma processing method | |
| JPWO2020121588A1 (en) | Plasma processing equipment | |
| JP4107738B2 (en) | Microwave plasma processing equipment | |
| JP6117763B2 (en) | Plasma processing equipment | |
| KR20240035708A (en) | Plasma processing apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220802 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220802 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230329 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230404 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230518 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230530 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230626 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7308498 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |